Фильтрация акустического загрязнения от датчиков безопасности транспортного средства - RU2681996C2
Код документа: RU2681996C2
Чертежи

Описание
БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА
РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка относится к заявке на патент США № 14/992,854 на имя Jensen и др. («Jensen»), поданной 11 Января 2016 года (номер дела патентного поверенного № 83609430 (026780-8099)), которая тем самым включена сюда путем ссылки во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к очистке сигналов или данных, производимых датчиками транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0003] Транспортные средства включают в себя датчики аварии, которые обнаруживают аварию или столкновение транспортного средства. Транспортные средства применяют датчики аварии для улучшения результатов аварии или столкновения. Например, многие транспортные средства прекращают подачу топлива в двигатель при обнаружении аварии или столкновения. Прекращение подачи топлива в двигатель снижает опасность пожара, связанную с аварией или столкновением, и, таким образом, увеличивает безопасность транспортных средств.
[0004] В дополнение к датчикам аварии транспортные средства включают в себя аудиосистемы, такие как клаксоны и аудиодинамики. Аудиосистемы могут быть OEM (т.е. установленными производителем) или послепродажными (например, установленными в мастерской, не связанной с производителем). Аудиосистемы могут вызывать вибрации, которые искажают или загрязняют данные датчиков аварии. Это искажение или загрязнение может приводить к ложноположительному обнаружению аварии или столкновения и, таким образом, вызывать ошибочное прекращение подачи топлива в двигатель транспортным средством.
[0005] Помимо неудобства, ошибочное прерывание подачи топлива в двигатель может быть опасным. Например, приводы зависят от надежной работы двигателя при выполнении поворотов. Если двигатель неожиданно выключается из-за прекращения подачи топлива, приводы могут остановиться в середине поворота. Дополнительно, прекращение подачи топлива в двигатель может необратимо повредить двигатель.
[0006] Требуется решение для повышения надежности датчиков аварии и, конкретнее, для учета искажения или загрязнения данных датчиков аварии, вызываемого как OEM, так и послепродажными аудиосистемами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Настоящее изобретение обеспечивает множество вариантов осуществления решения. Некоторые варианты осуществления решения включают в себя, среди прочего, прием сигнала от OEM и/или послепродажных аудиосистем, указывающего на генерирование звука. Основываясь на принятом сигнале, транспортное средство фильтрует или корректирует данные, собираемые от датчиков аварии, для генерирования отфильтрованных или скорректированных данных датчиков аварии. Затем транспортное средство определяет, прекращать ли подачу топлива в двигатель (или выполнять другие маневры безопасности), ссылаясь на отфильтрованные или скорректированные данные датчиков аварии.
[0008] Варианты осуществления решения являются самообучаемыми, это означает, что варианты осуществления непрерывно адаптируют методы фильтрации данных датчиков аварии с течением времени. Эти варианты осуществления предпочтительно позволяют транспортному средству фильтровать послепродажные аудиосистемы, которые установлены без ведома производителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Для лучшего понимания изобретения может быть сделана ссылка на варианты осуществления, показанные на следующих далее чертежах. Компоненты на чертежах не обязательно изображены в масштабе, и связанные элементы могут быть опущены, или в некоторых случаях пропорции могут быть преувеличены, чтобы подчеркнуть и наглядно проиллюстрировать новые признаки, описанные в данном документе. В дополнение, компоненты системы могут быть расположены различным образом, как известно в уровне техники. Дополнительно, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на всех видах.
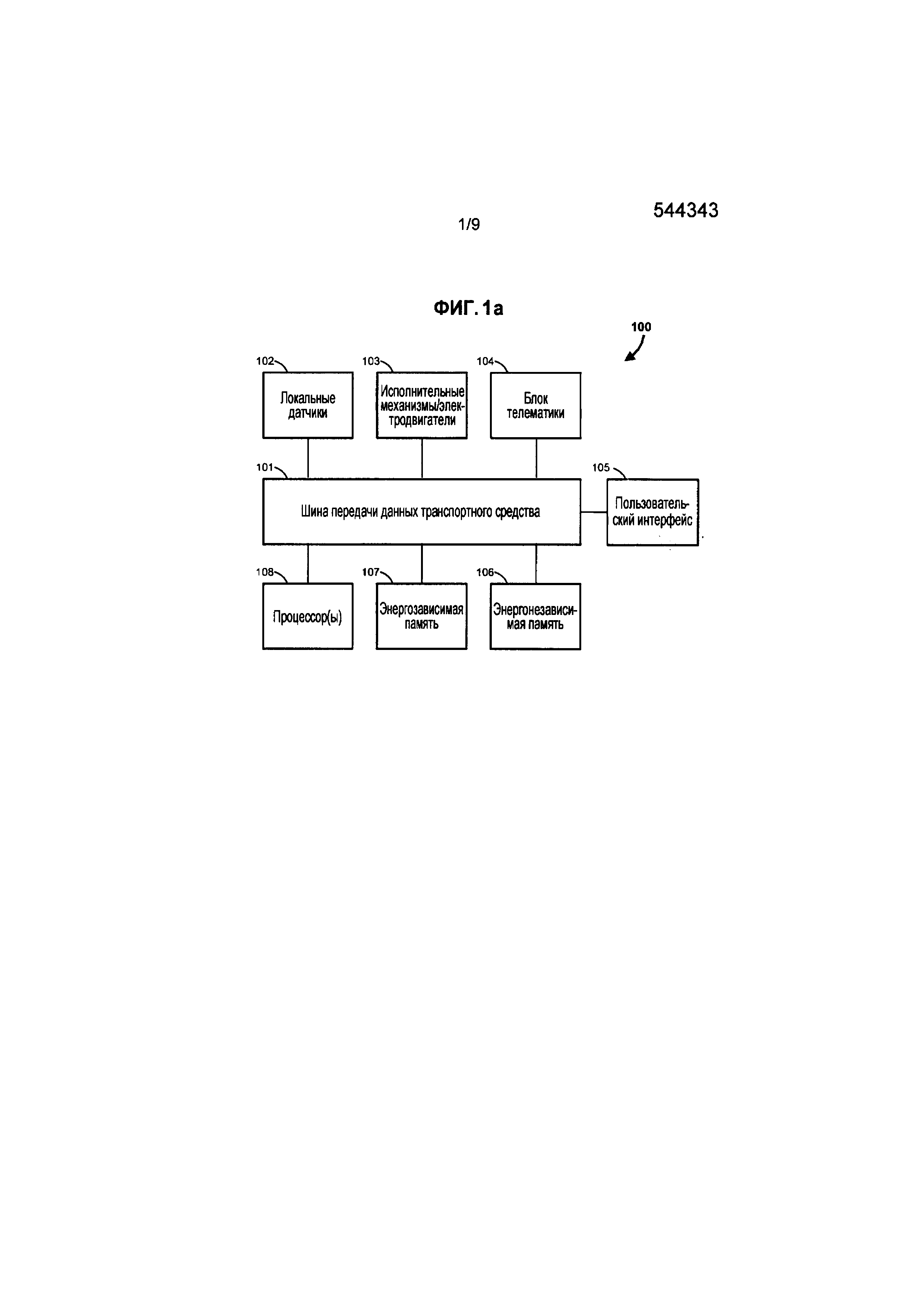
[0010] Фигура 1а представляет собой блок-схему вычислительной системы.
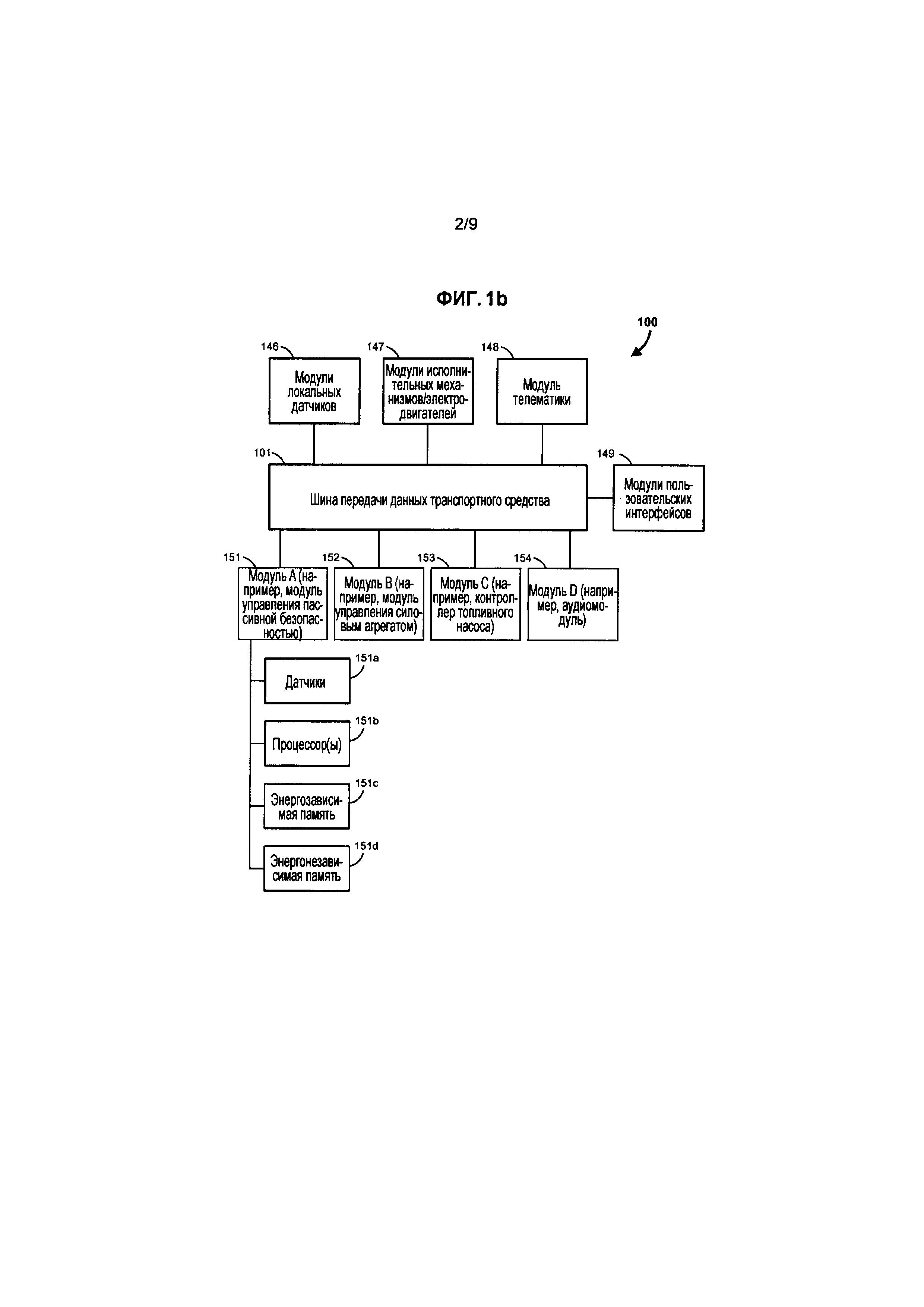
[0011] Фигура 1b представляет собой блок-схему варианта осуществления вычислительной системы.
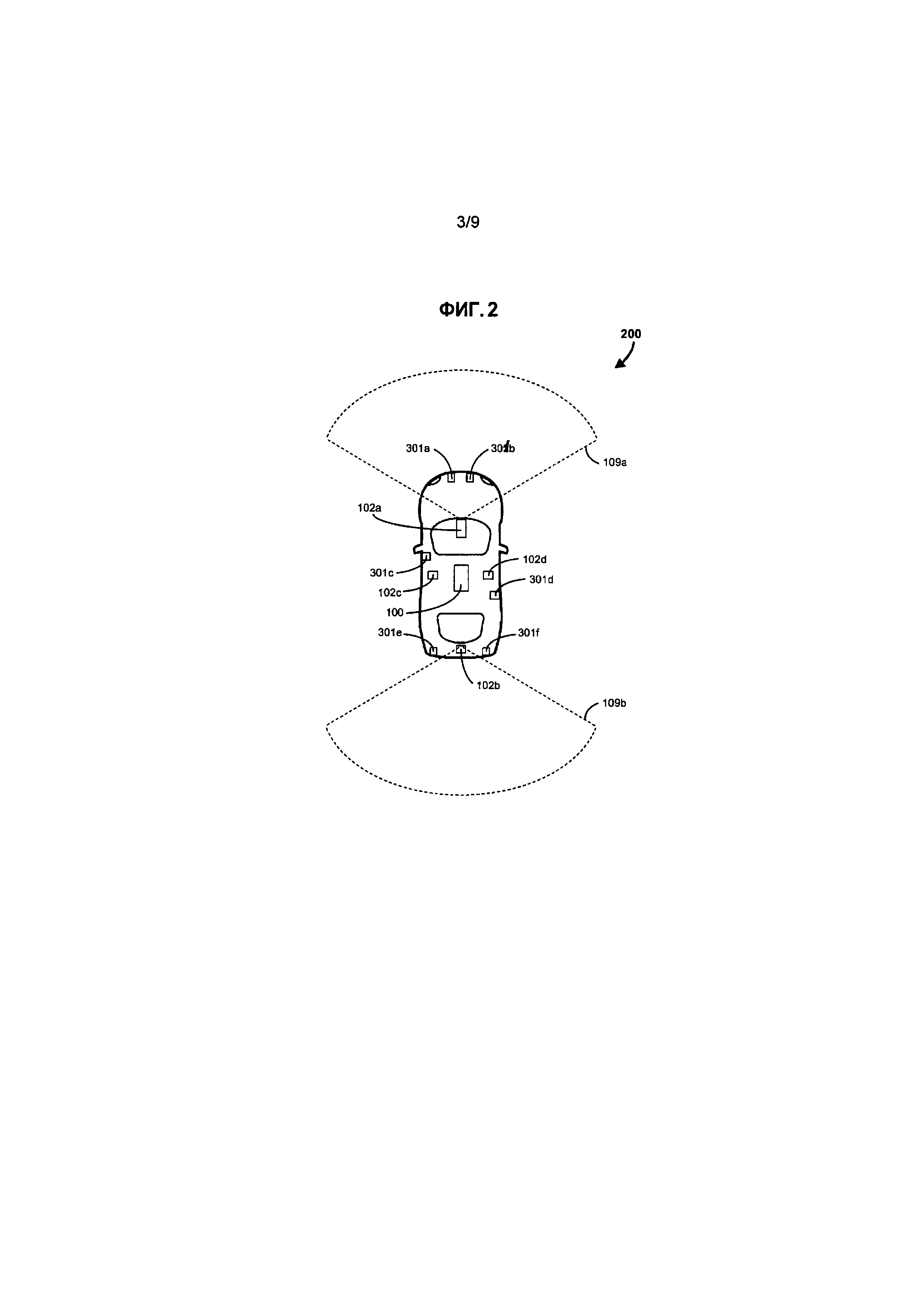
[0012] Фигура 2 показывает транспортное средство, которое включает в себя вычислительную систему.
[0013] Фигура 3 представляет собой блок-схему части вычислительной системы.
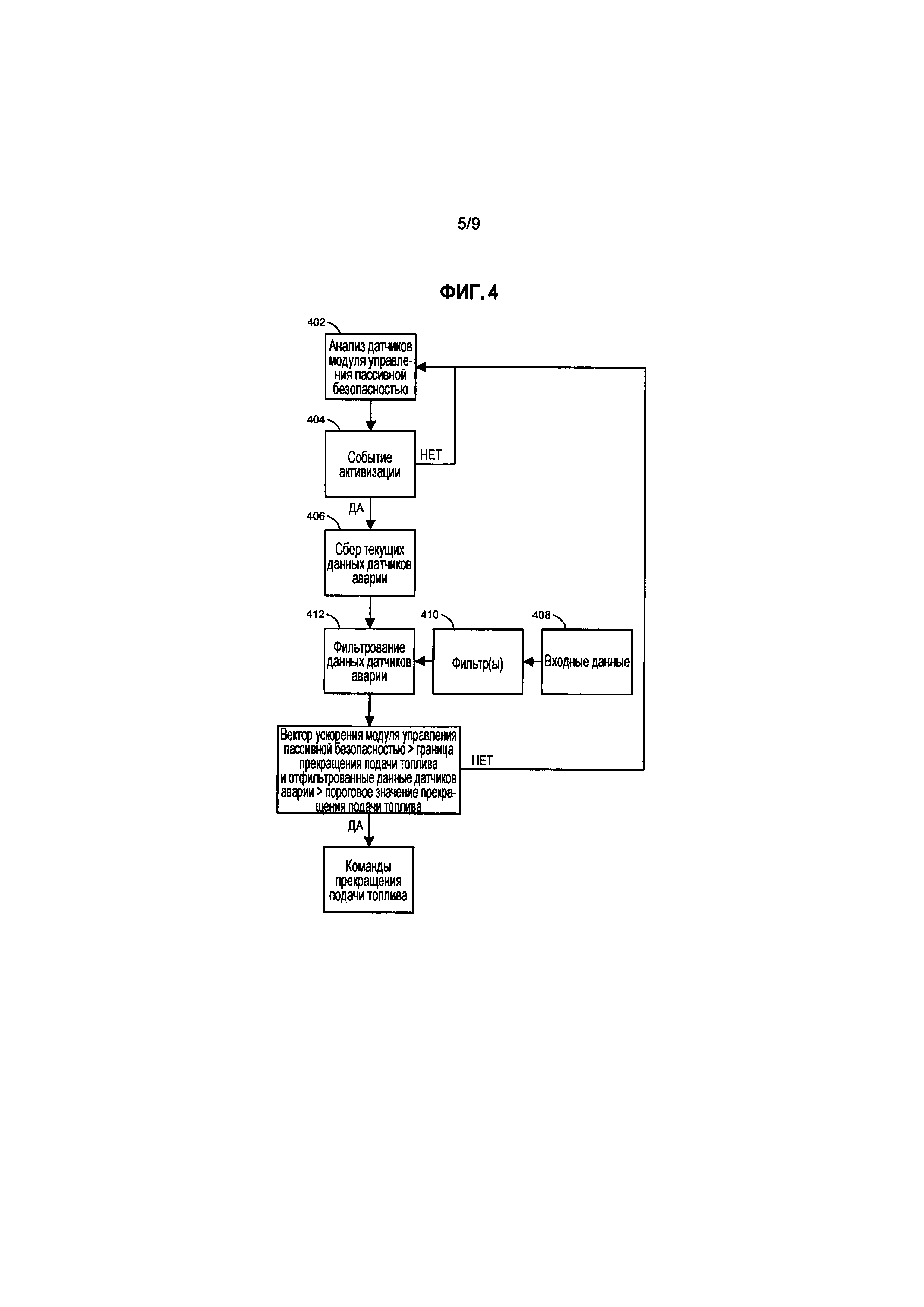
[0014] Фигура 4 представляет собой блок-схему способа.
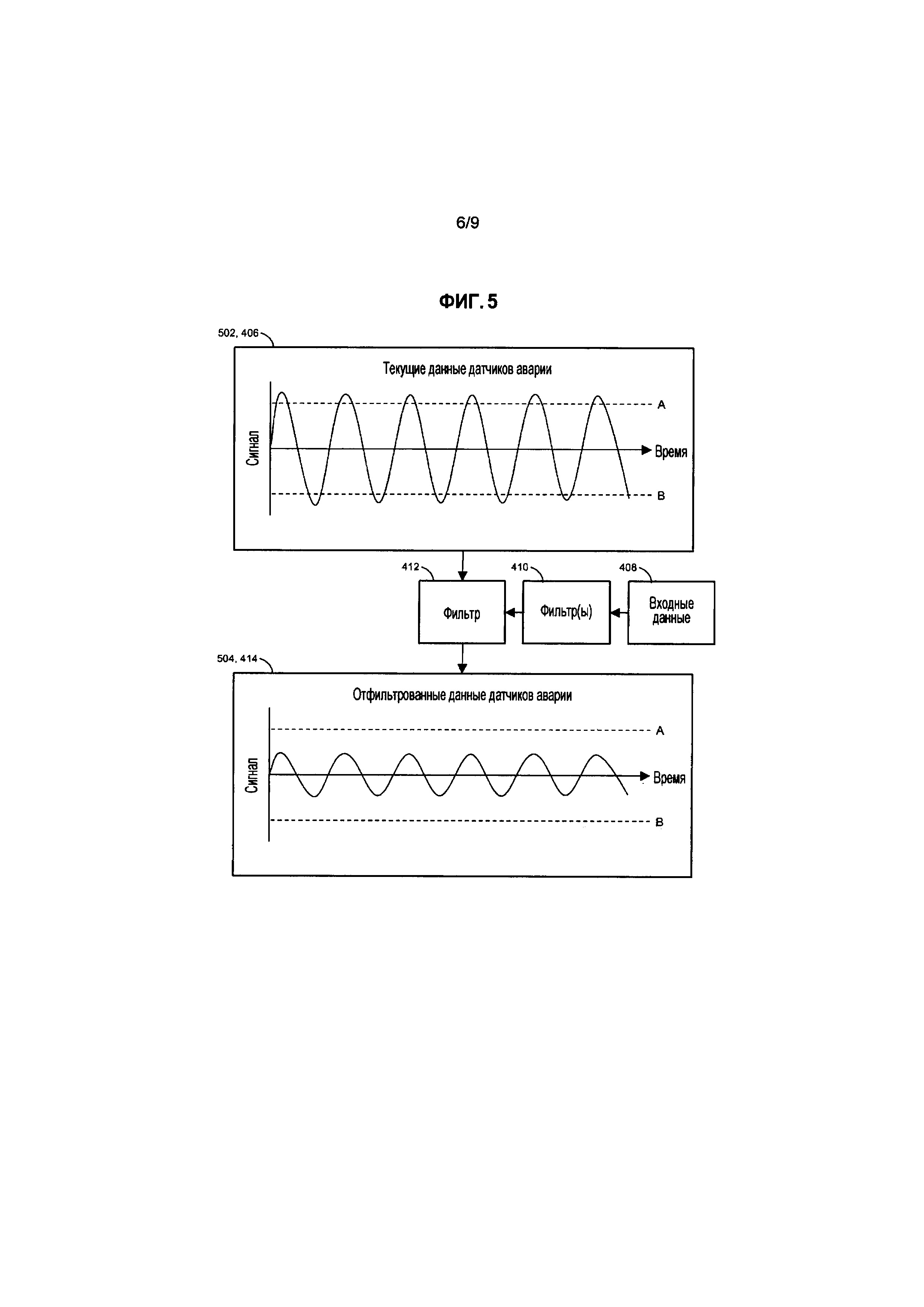
[0015] Фигура 5 иллюстрирует детали способа на Фигуре 4.
[0016] Фигура 6a представляет собой первую часть способа.
[0017] Фигура 6b представляет собой вторую часть способа на Фигуре 6a.
[0018] Фигура 7 иллюстрирует сравнение вектора ускорения с границами.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0019] Хотя изобретение может быть осуществлено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты осуществления с пониманием того, что настоящее раскрытие следует рассматривать как иллюстрацию изобретения, и оно не предназначено для ограничения изобретения определенными проиллюстрированными вариантами осуществления.
[0020] В этой заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование определенных или неопределенных артиклей не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Союз «или» может быть использован для передачи одновременно присутствующих признаков в качестве одного варианта, а не взаимоисключающих альтернатив в качестве другого варианта. Другими словами, союз «или» следует понимать как включающий в себя «и/или» в качестве одного варианта и «либо/или» в качестве другого варианта.
[0021] Фигура 1 показывает общую блок-схему вычислительной системы 100 транспортного средства 200. Фигура 1b (обсуждается ниже) показывает возможное более конкретное устройство вычислительной системы 100, показанной на Фигуре 1а.
[0022] Вычислительная система 100 обеспечивает автоматическое управление механическими системами в устройстве. Вычислительная система 100 обеспечивает связь с внешними устройствами. Вычислительная система 100 включает в себя шину 101 передачи данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательские интерфейсы 105, блок 104 телематики, исполнительные механизмы и электродвигатели 103 и локальные датчики 102.
[0023] Шина 101 передачи данных передает электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными для получения измененных электронных сигналов или данных. Энергозависимая память 107 хранит данные для непосредственного вызова процессором 108. Энергонезависимая память 106 хранит данные для вызова в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя ряд энергонезависимых запоминающих устройств, включая жесткие диски, SSD, DVD, диски Blu-Ray и т.д. Пользовательский интерфейс 105 включает в себя дисплеи, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые позволяют пользователю взаимодействовать с вычислительной системой. Блок 104 телематики обеспечивает как проводную, так и беспроводную связь с внешними процессорами с помощью Bluetooth, сотовых данных (например, 3G, LTE), USB, DSRC и т.д. Блок 104 телематики может быть выполнен с возможностью передачи сигналов на определенной частоте.
[0024] Исполнительные механизмы/электродвигатели 103 производят физические действия. Примеры исполнительных механизмов/электродвигателей включают в себя топливные насосы, топливные форсунки, стеклоочистители, цепи тормозных фонарей, передачи, подушки безопасности, двигатели, электродвигатели силового агрегата, рулевое управление и т.д. Локальные датчики 102 передают аналоговые или цифровые показания или измерения на процессор(ы) 108. Примеры локальных датчиков включают в себя температурные датчики, датчики поворота, датчики ремней безопасности, датчики аварии, акселерометры, датчики скорости, камеры, лидарные датчики, радиолокационные датчики и т.д. Следует понимать, что различные соединенные компоненты на Фигуре 1а могут включать в себя отдельные или специализированные процессоры, память и датчики, обсуждаемые со ссылкой на Фигуру 1b. Другими словами, каждый из различных соединенных компонентов на Фигуре 1а может быть отдельным модулем.
[0025] Фигура 1b представляет собой блок-схему более конкретного устройства вычислительной системы 100. Другими словами, Фигура 1b показывает одно возможное устройство вычислительной системы 100, раскрытой на Фигуре 1а.
[0026] Со ссылкой на Фигуру 1b вычислительная система 100 включает в себя модули 146 локальных датчиков, модули 147 исполнительных механизмов/электродвигателей, один или более модулей 148 телематики, модули 149 пользовательских интерфейсов, модуль A, модуль B, модуль C и модуль D. Вычислительная система 100 включает в себя ряд дополнительных модулей (не показаны). Модули соединены через одну или более шин 101 передачи данных. Следует понимать, что некоторые модули могут быть напрямую соединены через шину 101 передачи данных, в то время как другие модули могут быть опосредованно соединены через шину 101 передачи данных (например, модуль A соединяется с некоторыми из модулей 147 исполнительных механизмов/электродвигателей через модуль B).
[0027] Каждый из модулей может включать в себя специализированные датчики, процессор(ы), энергозависимую память, энергонезависимую память и другие элементы (например, антенны, исполнительные механизмы и т.д.) Например, модуль A включает в себя специализированные датчики 151a, специализированный(ые) процессор(ы) 151b, специализированную энергозависимую память 151c и специализированную энергонезависимую память 151d. Такая же концепция может применяться к некоторым или ко всем другим модулям.
[0028] Модули 146 локальных датчиков могут включать в себя некоторые или все локальные датчики 102. Модули 147 исполнительных механизмов/электродвигателей могут включать в себя некоторые или все исполнительные механизмы/электродвигатели 103. Модули 148 телематики могут включать в себя некоторые или все блоки 104 телематики. Модули 149 пользовательских интерфейсов могут включать в себя некоторые или все пользовательские интерфейсы 105. Как отмечено выше, каждый из этих модулей может включать в себя специализированный(ые) процессор(ы), специализированную энергозависимую память, специализированную энергонезависимую память и специализированные датчики. В целях данного раскрытия выражение локальные датчики может охватывать все датчики, установленные на или размещенные в транспортном средстве 200, включая датчики, предназначенные для конкретного модуля (например, датчики 151a модуля A).
[0029] Модуль A может быть модулем 151 управления пассивной безопасностью (RCM). Модуль B может быть модулем 152 управления силовым агрегатом (PCM). Модуль C может быть контроллером 153 топливного насоса. Модуль D может быть аудиоконтроллером 154 (OEM и/или послепродажным).
[0030] Фигура 2 показывает транспортное средство 200. Транспортные средства описаны, например, в заявке на патент США № 14/991,496 на имя Miller и др. («Miller»), в патенте США № 8,180,547 на имя Prasad и др. («Prasad»), в заявке на патент США № 15/186,850 на имя Lavoie и др. («Lavoie») и в заявке на патент США № 14/972,761 на имя Hu и др. («Hu»), все из которых включены сюда путем ссылки во всей их полноте. Транспортное средство 200 настоящего изобретения может включать в себя некоторые или все признаки, описанные в документах на имя Miller, Prasad, Lavoie, Jensen (включен сюда путем ссылки выше) и/или Hu.
[0031] Транспортное средство 200 может включать в себя одно или более каждого из следующих: вычислительная система 100, двигатели, электродвигатели, аккумуляторы, двери, сиденья, колеса, шины, рамы, панели, приборные панели, подушки безопасности, топливные баки, тормоза, зарядные устройства для аккумуляторов, выхлопные системы, топливные насосы, топливные форсунки и т.д. Хотя не показано, транспортное средство 200 может находиться в оперативной беспроводной связи с одним или более внешними вычислительными устройствами, такими как мобильные телефоны и серверы.
[0032] Транспортное средство может быть обычным транспортным средством с двигателем внутреннего сгорания (т.е. энергия подается за счет сгорания топлива, такого как бензин или дизельное топливо, в двигателе(ях)), обычным гибридным транспортным средством (т.е. энергия подается за счет сгорания в двигателе(ях) и/или от электрического внешнего источника питания, и часть энергии привода восстанавливается в гибридном аккумуляторе) или обычным электрическим транспортным средством (т.е. энергия подается от электрического внешнего источника питания, и часть энергии привода может быть восстановлена в аккумуляторе). Хотя не показано, транспортное средство может быть воздушным судном, таким как самолет или вертолет, лодкой или кораблем или промышленной машиной (например, трактором).
[0033] Некоторые из локальных датчиков 102 установлены на внешней части транспортного средства 200. Локальный датчик 102а может быть ультразвуковым датчиком, лидарным датчиком, камерой, видеокамерой и/или микрофоном и т.д. Локальный датчик 102а может быть выполнен с возможностью обнаружения объектов, следующих впереди транспортного средства 200. Локальный датчик 102b может быть ультразвуковым датчиком, лидарным датчиком, камерой, видеокамерой и/или микрофоном и т.д. Локальный датчик 102b может быть выполнен с возможностью обнаружения объектов, следующих позади транспортного средства 200, как обозначено задним диапазоном 109b обнаружения. Левый датчик 102c и правый датчик 102d могут быть выполнены с возможностью выполнения тех же функций для левой и правой сторон транспортного средства 200.
[0034] Транспортное средство 200 включает в себя множество других датчиков 102, расположенных в салоне транспортного средства или на внешней части транспортного средства. Например, транспортное средство 200 включает в себя множество датчиков 301 аварии. Транспортное средство включает в себя передний левый датчик 301a аварии, передний правый датчик 301b аварии, левый датчик 301c аварии, правый датчик 301d аварии, задний левый датчик 301e аварии и задний правый датчик 301f аварии. Каждый из датчиков 301 аварии включает в себя акселерометр. Как известно в уровне техники, акселерометры могут применять пьезоэлектрический эффект для вывода сигнала напряжения, который пропорционален ускорению.
[0035] Следует понимать, что транспортное средство 200 выполнено с возможностью выполнения способов и операций, описанных ниже. В некоторых случаях транспортное средство 200 выполнено с возможностью выполнения этих функций с помощью компьютерных программ, хранящихся в энергозависимой и/или энергонезависимой памяти вычислительной системы 100. Среди прочего, процессор «выполнен с возможностью» выполнения раскрытой операции, когда процессор находится в оперативной связи с памятью, хранящей программное обеспечение с кодом или инструкциями, воплощающими раскрытую операцию. Дополнительное описание того, как процессор, запоминающие устройства и программы взаимодействуют, содержится в патенте на имя Prasad. Следует понимать, что внешнее устройство в оперативной связи с транспортным средством 200 выполняет некоторые или все из способов и операций, обсуждаемых ниже.
[0036] Фигура 3 представляет собой блок-схему части 300 вычислительной системы 100 транспортного средства. Модуль управления пассивной безопасностью (RCM) находится в двунаправленной связи и/или в однонаправленной связи с датчиками 301 аварии, аудиомодулем 154a OEM, послепродажным аудиомодулем 154b, локальными датчиками 146a окружающей среды, другими локальными датчиками 146b (включая любой из локальных датчиков 102, описанных ранее), модулем 148 телематики, модулем 153 управления топливным насосом и модулем 152 управления силовым агрегатом (PCM). RCM может находиться в дополнительной двунаправленной или однонаправленной связи с другими модулями безопасности (например, модулем развертывания подушек безопасности или модулем выключения аккумулятора или электродвигателя). Шина 101 передачи данных транспортного средства облегчает эту связь.
[0037] Модуль 153 управления топливным насосом регулирует работу топливного насоса 147а, который подает жидкое топливо из топливного бака транспортного средства 200 в двигатель транспортного средства 200. Топливный насос 147а может быть размещен в топливном баке. Двигатель включает в себя топливный насос 147b высокого давления, который применяет дополнительное давление к топливу, принимаемому от топливного насоса 147а. PCM 152 регулирует работу топливного насоса 147b высокого давления. Топливный насос 147b высокого давления представляет собой специализированный компонент, который устанавливается на уникальных транспортных средствах (например, гоночных автомобилях).
[0038] Фигуры 4, 5, 6a и 6b представляют собой блок-схемы способов и операций, выполняемых на транспортном средстве 200. Как объяснено выше, способы и операции хранятся в памяти (например, памяти одного или более модулей) и выполняются одним или более процессорами (например, процессорами одного или более модулей). Некоторые из способов и операций могут быть поделены между модулями. В таких случаях модули могут хранить только их соответствующие части способов.
[0039] Фигура 4 представляет собой блок-схему способа прекращения подачи топлива 400. Способ в общем включает в себя этапы, на которых (a) собирают текущие данные датчиков аварии от датчиков 301 аварии, (b) фильтруют собранные текущие данные датчиков аварии и (c) применяют отфильтрованные данные датчиков аварии для обнаружения или определения события аварии.
[0040] Настоящая заявка относится к различным типам данных датчиков аварии. В целях ясности некоторые из различных типов данных датчиков аварии являются следующими: (i) Текущие данные датчиков аварии представляют собой данные датчиков аварии, которые записываются во время возможного события столкновения, и когда транспортное средство находится в движении. (ii) Отфильтрованные или очищенные данные датчиков аварии представляют собой данные датчиков аварии, которые были отфильтрованы. Как обсуждается ниже, фильтр обычно вычитает загрязнение из текущих данных датчиков аварии. Согласно некоторым вариантам осуществления: отфильтрованные данные датчиков аварии=(текущие данные датчиков аварии)- (загрязненные данные датчиков аварии). (iii) Загрязненные данные датчиков аварии представляют собой данные датчиков аварии, собираемые во время процесса самообучения. Загрязненные данные датчиков аварии представляет данные, представляемые датчиками 301 аварии, когда не произошло никакого события аварии.
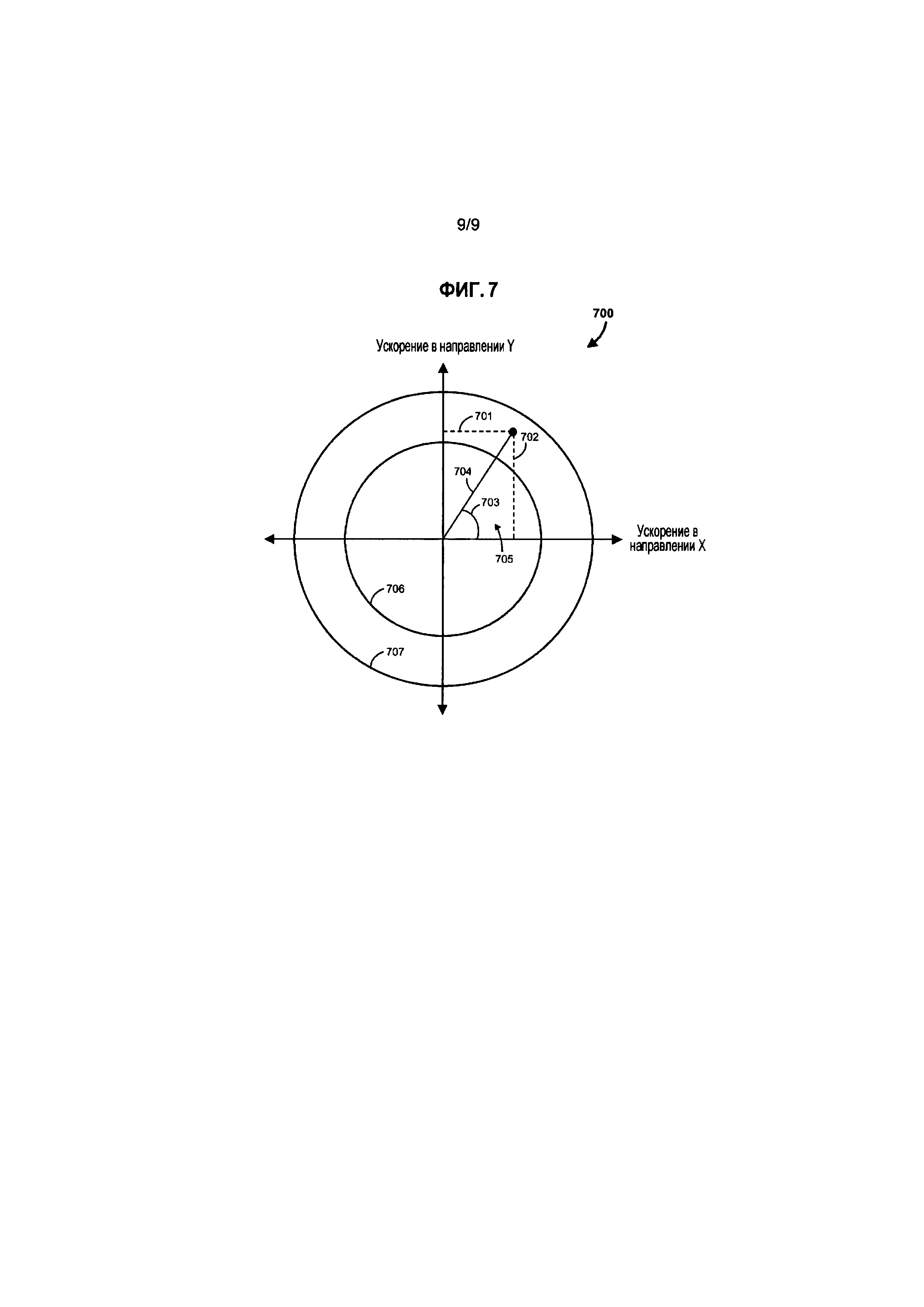
[0041] В блоке 402 RCM 151 непрерывно анализирует локальные датчики 151a RCM для создания вектора 705 результирующего ускорения (показанного на Фигуре 7). Локальные датчики 151a RCM измеряют события ускорения в направлении X (т.е. параллельно земле и параллельно продольной главной оси транспортного средства) и события ускорения в направлении Y (т.е. параллельно земле и перпендикулярно продольной главной оси транспортного средства).
[0042] Со ссылкой на Фигуру 7 RCM находит вектор 705 результирующего ускорения на основе ускорения в направлениях X и Y в соответствии со следующей формулой: величина результирующего ускорения 704=[(ускорение в направлении X 701)2+(ускорение в направлении Y 702)2]1/2. RCM дополнительно определяет угол результирующего ускорения 703 в соответствии со следующей формулой: (угол результирующего ускорения 703)=cos-1[(ускорение в направлении X 701)/(величина результирующего ускорения 704)]. Вектор 705 результирующего ускорения представляет собой сегмент, проходящий от центра графика под углом результирующего ускорения 703 на длину, равную величине результирующего ускорения 704.
[0043] Фигура 7 показывает две заданные границы: границу 706 активизации и границу 707 прекращения подачи топлива. Границы 706, 707 могут быть круглыми и иметь центр в нулевой точке графика 700. Согласно другим предпочтительным вариантам осуществления границы 706, 707 представляют собой овалы или эллипсы с большой осью вдоль оси X и малой осью вдоль оси Y. Границы 706, 707 указаны и заданы производителем.
[0044] Со ссылкой на Фигуры 4 и 7 на этапе 402 RCM сравнивает вектор 705 результирующего ускорения с границей 706 активизации. Если вектор 705 результирующего ускорения пересекает границу 706 активизации, то RCM переходит к блоку 406. Если вектор 705 результирующего ускорения заключен в пределах границы 706 активизации, то RCM перезапускает способ 400 в блоке 402.
[0045] Во время нормальной работы (т.е., когда ни один из обсуждаемых ниже алгоритмов самообучения не применяется) RCM игнорирует данные, представляемые датчиками 301 аварии. Пересечение границы 706 активизации в блоке 404 заставляет RCM обращать внимание или активно собирать и записывать данные, представляемые датчиками 301 аварии.
[0046] Таким образом, в блоке 402 RCM собирает текущие данные датчиков аварии от датчиков 301 аварии. В блоке 408 RCM собирает или получает входные данные (обсуждаемые ниже). В блоке 410 RCM выбирает один или более фильтров, основываясь на собранных или загруженных входных данных. Как обсуждается ниже, один или более фильтров в общем позволяют RCM вычитать или отфильтровывать выбранные загрязненные данные датчиков аварии из текущих данных датчиков аварии. Таким образом, один или более фильтров выбираются, чтобы наиболее точно вычитать или фильтровать выбранные загрязненные данные датчиков аварии.
[0047] В блоке 412 RCM фильтрует текущие данные датчиков аварии с помощью одного или более фильтров. В блоке 414 RCM определяет, стоит ли выполнять прекращение подачи топлива. Сначала RCM сравнивает вектор 705 результирующего ускорения с границей 707 прекращения подачи топлива (FCO) (RCM может обновлять вектор 705 результирующего ускорения, основываясь на новых данных ускорения в промежуточный период). Если вектор 705 результирующего ускорения не пересекает границу 707 FCO (т.е. заключен в пределах границы 707 FCO), то способ 400 перезапускается в блоке 402. Если вектор 705 результирующего ускорения пересекает границу 707 FCO, то RCM сравнивает отфильтрованные данные датчиков аварии с одним или более пороговыми значениями прекращения подачи топлива (FCO) (обсуждаемыми ниже). Если отфильтрованные данные датчиков аварии входят в пределы одного или более пороговых значений FCO, то RCM перезапускает способ 400 в блоке 402.
[0048] Если отфильтрованные данные датчиков аварии выходят за пределы или превышают одно или более пороговых значений FCO, то RCM посылает команду прекращения подачи топлива (FCO) на модуль 153 управления топливным насосом и PCM 152 в блоке 416. В ответ на команду FCO модуль 153 управления насосом деактивирует топливный насос 147а, что предотвращает перемещение топлива из топливного бака в двигатель. В ответ на команду FCO PCM 152 деактивирует топливный насос 147b высокого давления, что предотвращает впрыск топлива в двигатель. Другие модули или компоненты также могут приводиться в действие в ответ на команду FCO. Например, подушки безопасности могут развертываться, транспортное средство 200 может передавать сигнал бедствия, и/или транспортное средство может давать команду аккумуляторам прекращать подачу тока или уменьшать подачу тока.
[0049] Фигура 5 более подробно описывает блоки 406, 408, 410, 412, и 414 на Фигуре 4. Блок 502 на Фигуре 5 иллюстрирует пример текущих данных датчиков аварии, собранных в блоке 406 на Фигуре 4. Это текущие данные датчиков аварии загрязнены аудиосистемой, такой как клаксон или громкоговорители. Ось X данных представляет собой время. Ось Y данных представляет собой ускорение.
[0050] Со ссылкой на блок 502 текущие данные датчиков аварии, собранные от датчика аварии в блоке 406, превышают пороговое значение FCO. Конкретнее, сигнал выходит за пределы диапазона, образованного между верхней границей A и нижней границей B (таким образом, один вариант осуществления порогового значения FCO можно рассматривать, как диапазон, образованный между верхней границей A и нижней границей B). Следует понимать, что это пороговое значение FCO является чисто иллюстративным, и на практике могут быть применены другие виды пороговых значений FCO. Например, пороговое значение FCO вместо того, чтобы быть диапазоном значений между верхней и нижней границами, может быть среднеквадратичным значением.
[0051] Со ссылкой на Фигуры 4 и 5 в блоках 408 и 410 RCM измеряет входные данные, а затем выбирает один или более фильтров, основываясь на входных данных. Как обсуждается ниже, входные данные в общем включают в себя набор условий и набор активностей. В блоке 412 RCM фильтрует текущие данные датчиков аварии для удаления загрязнения и получения отфильтрованных или очищенных данных датчиков аварии.
[0052] Блок 504 на Фигуре 5 представляет собой отфильтрованные или очищенные данные датчиков аварии. Данные отфильтрованы или очищены одним или более фильтрами блока 412. Блок 504 на Фигуре 5 соответствует выходному сигналу блока 412 на Фигуре 4.
[0053] Со ссылкой на Фигуру 5 отфильтрованные данные датчиков аварии больше не находятся за пределами диапазона, образованного между верхней границей A и нижней границей B. Таким образом, отфильтрованные данные датчиков аварии не превышают пороговое значение FCO. В результате, со ссылкой на Фигуру 4 транспортное средство будет возвращаться в блок 402 из блока 414, поскольку отфильтрованные данные датчиков аварии не будут превышать пороговое значение FCO.
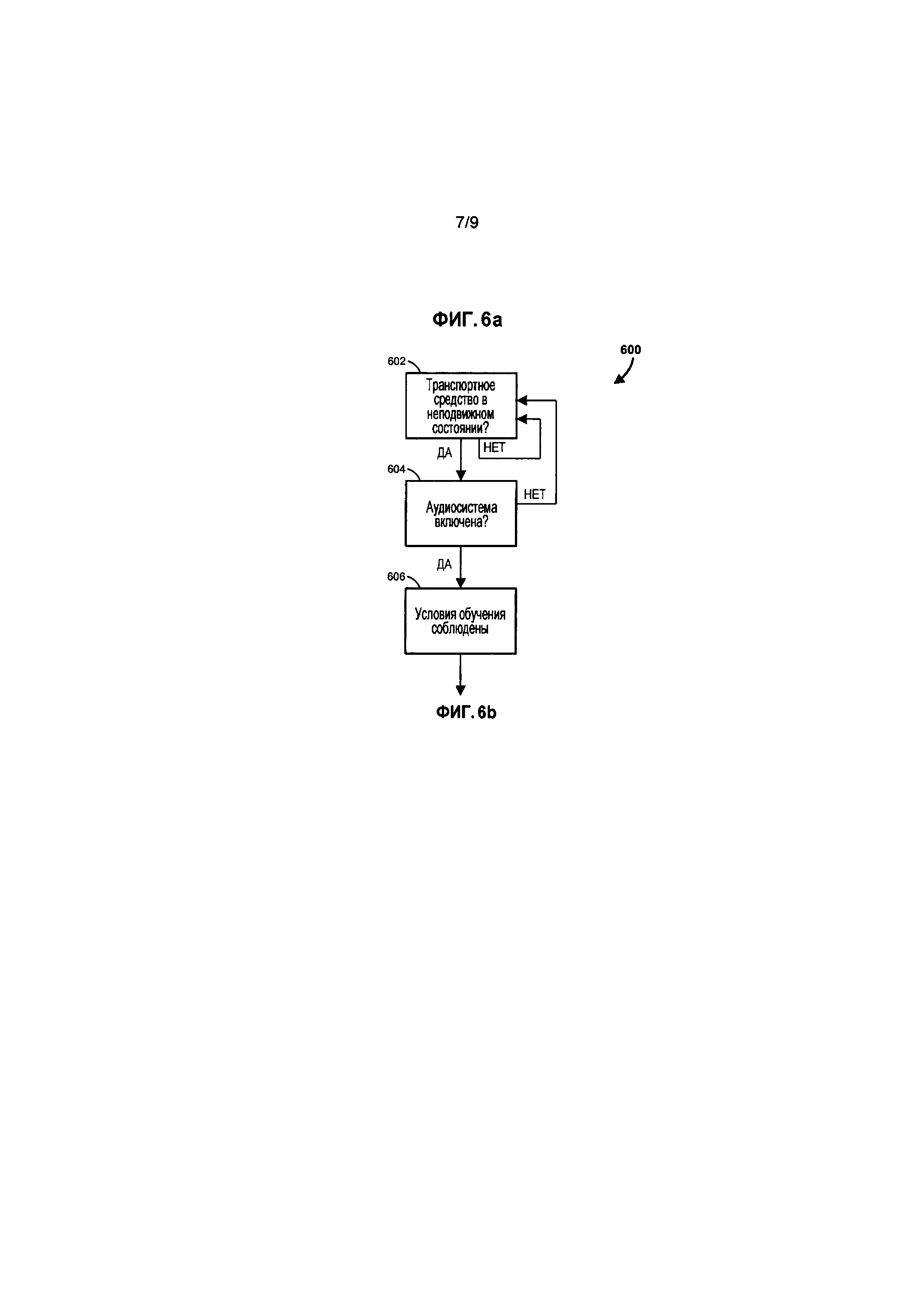
[0054] Фигуры 6а и 6b показывают способ 600 связи загрязненных данных датчиков аварии с входными данными. Как отмечено выше, один или более фильтров удаляют загрязненные данные датчиков аварии из текущих данных датчиков аварии. Таким образом, RCM выбирает один или более фильтров, основываясь на загрязненных данных датчиков аварии, которые должны быть удалены. Таким образом, способ 600 представляет собой алгоритм самообучения, который позволяет RCM выбирать один или более фильтров, основываясь на вновь записываемых загрязненных данных датчиков аварии.
[0055] Способ 600 в общем включает в себя этапы, на которых (a) определяют, соблюдены ли условия обучения, (b) измеряют или записывают различные входные данные, (c) измеряют или записывают загрязненные данные датчиков аварии и (d) спаривают измеренные или записанные различные входные данные с измеренными или записанными данными датчиков аварии в справочной таблице. Во время способа 400 на Фигуре 4 RCM измеряет или записывает текущие входные данные (т.е. входные данные, которые имеются при сборе текущих данных датчиков аварии), ссылается на справочную таблицу для нахождения загрязненных данных датчиков аварии, которые соответствуют текущим входным данным, а затем выбирает один или более фильтров, которые наилучшим образом удаляют или вычитают обнаруженные загрязненные данные датчиков аварии из текущих данных датчиков аварии.
[0056] Далее следует пример: при нахождении в состоянии холостого хода (в режиме холостого хода или парковки) RCM определяет, что клаксон включен. RCM собирает загрязненные данные датчиков аварии за период времени, когда клаксон включен. RCM сохраняет загрязненные данные датчиков аварии в справочной таблице, которая связывает эти конкретные загрязненные данные датчиков аварии с включенным клаксоном. Позже, после события активизации RCM определяет, что клаксон включен. RCM также собирает текущие данные датчиков аварии. Текущие данные датчиков аварии загрязнены клаксоном.
[0057] RCM ссылается на справочную таблицу, чтобы найти загрязненные данные датчиков аварии, связанные включенным клаксоном. Используя эти загрязненные данные датчиков аварии, RCM выбирает один или более фильтров, которые позволяют RCM вычитать загрязненные данные датчиков аварии из текущих данных датчиков аварии. Результатом вычитания являются отфильтрованные данные датчиков аварии. RCM сравнивает отфильтрованные данные датчиков аварии, а не текущие данные датчиков аварии, с пороговым значением FCO.
[0058] Со ссылкой на Фигуру 6a в блоке 602 RCM определяет, находится ли транспортное средство в неподвижном состоянии. Транспортное средство находится в неподвижном состоянии в состоянии парковки и в состоянии холостого хода (например, при холостом ходу на светофоре). Когда транспортное средство находится в неподвижном состоянии, RCM определяет, включена ли аудиосистема. Конкретнее и со ссылкой на Фигуру 3 RCM принимает сигнал активности от аудиомодуля 154a OEM и/или послепродажного аудиомодуля 154b, указывающий, генерируется ли звук в настоящее время. Звук может быть звуком клаксона или может быть звуком динамиков. Сигнал активности может быть бинарным (т.е. включено или выключено) или может быть переменным по величине (например, уровень громкости 1, 2, 3 и т.д.). Если сигнал активности присутствует, RCM определяет, что условия обучения присутствуют, в блоке 606. Как и в случае всех раскрытых признаков, следует понимать, что условия обучения на Фигуре 6a являются чисто иллюстративными и могут быть заменены или исключены (обсуждается ниже).
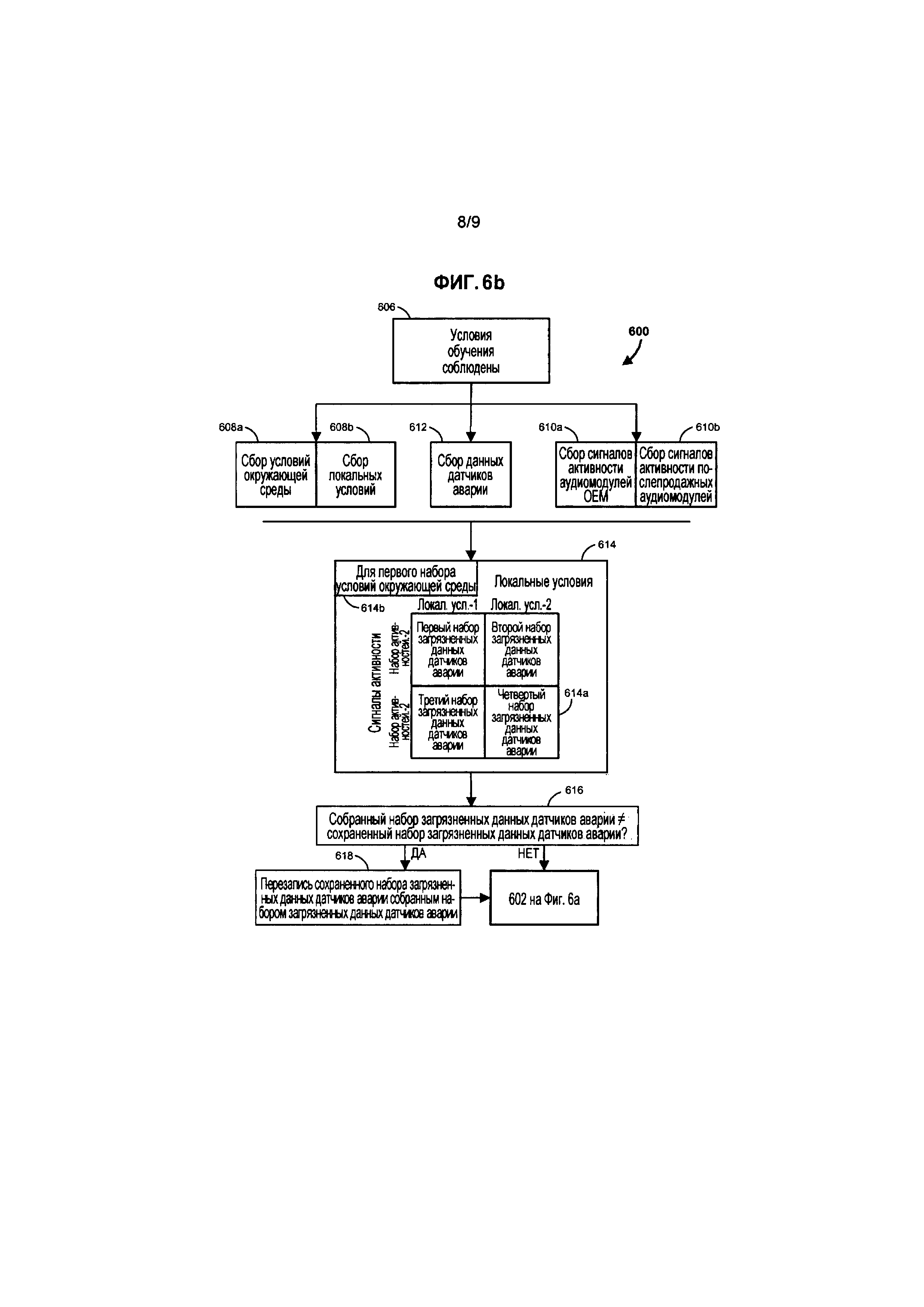
[0059] Со ссылкой на Фигуру 6b RCM собирает или записывает входные данные в блоках 608 и 610. RCM связывает загрязненные данные датчиков аварии с записанными входными данными. Позже RCM собирает или записывает различные виды одних и тех же входных данных и определяет фильтруемые загрязненные данные датчиков аварии, основываясь на собранных или записанных входных данных.
[0060] RCM записывает или собирает набор условий в блоке 608, включая условия окружающей среды в блоке 608a и локальные условия в блоке 608b. Условия окружающей среды принимаются через локальные датчики, такие как датчики влажности, или по Internet и включают в себя вид погоды (снег, дождь, солнечная погода и т.д.), масштабы погодного явления (например, небольшой дождь или сильный дождь), температуру, влажность, время суток, местоположение, коэффициент трения дорожной поверхности (например, неровная или гладкая) и т.д. Локальные условия принимаются через локальные датчики 102 транспортного средства и относятся к состоянию или свойству транспортного средства, включая скорость, ускорение, крутящий момент, поданный на колеса, вес, передачу, метод генерирования энергии (например, генерирование энергии с помощью двигателя или генерирование энергии с помощью гибридного аккумулятора) и т.д.
[0061] В блоке 610 RCM записывает или собирает набор активностей, включающий в себя сигналы активности от аудиомодулей OEM в блоке 610a и послепродажных аудиомодулей в блоке 610b. RCM может принимать эти сигналы активности через шину передачи данных, как показано на Фигуре 3. Конкретнее, RCM извлекает (или аудиомодули поставляют) сигналы активности из аудиомодулей.
[0062] Как обсуждалось ранее, каждый сигнал активности может быть бинарным (например, клаксон включен или клаксон выключен) или может быть переменным (например, динамики играют на уровне громкости 1, 2, 3, и т.д.). Переменные сигналы активности представляют текущую громкость звука. Например, представьте, что послепродажная аудиосистема воспроизводит трек A. Пользователь послепродажной аудиосистемы устанавливает послепродажную аудиосистему на уровень громкости 8. В момент времени 1 громкость трека A составляет 7; в момент времени 2 громкость трека A составляет 0; в момент времени 3 громкость трека A составляет 4 (иначе говоря, даже если звук находится на уровне 8, аудиосистема не всегда будет воспроизводить трек A на уровне громкости 8). Модуль RCM может принимать фактическую громкость трека с учетом установленного уровня громкости (например, 7 в момент времени 1, 0 в момент времени 2 и 4 в момент времени 3) вместо установленного уровня (например, 8). Альтернативно, модуль RCM может просто принимать установленный пользователем уровень громкости (например, 8).
[0063] В блоке 612 RCM записывает или собирает загрязненные данные датчиков аварии от каждого из датчиков 301 аварии. Поскольку транспортное средство находится в неподвижном состоянии, загрязненные данные датчиков аварии должны быть обнулены. Таким образом, отклонение от нуля указывает на то, что данные датчика аварии загрязнены аудиосигналами OEM или послепродажной аудиосистемы.
[0064] В блоке 614 RCM связывает загрязненные данные датчиков аварии с входными данными. Спаривание или связывание проиллюстрировано как содержащееся в справочной таблице. Например, справочная таблица 614a связывает первый набор (AS-1) активностей и первый набор (LC-1) локальных условий с третьим набором (CSD-3) загрязненных данных датчиков аварии. Первым набором активностей может быть активный клаксон OEM и неактивные все другие аудиомодули. Вторым набором активностей может быть послепродажный аудиомодуль, осуществляющий воспроизведение на уровне громкости 3, в то время как все другие аудиомодули неактивны. Первым набором локальных условий может быть конкретный вес транспортного средства и конкретный метод генерирования энергии (например, энергия подается только с помощью гибридного аккумулятора).
[0065] Таким образом, следует понимать, что каждый набор активностей должен включать в себя значение (возможно, ноль) для каждого из аудиомодулей. Дополнительно, каждый набор локальных условий должен включать в себя значение (возможно, ноль) для каждого из локальных условий.
[0066] Со ссылкой на блок 614 справочная таблица 614a соответствует первому набору (АС-1) условий окружающей среды, показанному в блоке 614b. Различные наборы условий окружающей среды могут ссылаться на различные справочные таблицы. Например, первый набор (АС-1) условий окружающей среды может ссылаться на справочную таблицу 614a, в то время как второй набор условий окружающей среды может ссылаться на другую справочную таблицу.
[0067] Как отмечено выше, первый набор условий окружающей среды может включать в себя конкретный вид погоды (снег, дождь, солнечная погода и т.д.), конкретные масштабы погодного явления (например, небольшой дождь или сильный дождь), определенную температуру, определенную влажность, определенное время суток, определенное местоположение и/или определенный коэффициент трения дорожной поверхности (например, неровная или гладкая) и т.д. Каждый набор условий окружающей среды должен включать в себя значение (возможно, ноль) для каждого из условий окружающей среды.
[0068] Поскольку различным наборам информации требуется точка или значение данных для каждого элемента наборов, объем памяти, требуемый для хранения загрязненных данных датчиков аварии, экспоненциально увеличивается с количеством элементов, присутствующих в различных наборах. Например, когда набор условий окружающей среды включает в себя три элемента (например, конкретный вид погоды, конкретные масштабы погодного явления и конкретную температуру), требуются три точки данных для нахождения подходящей справочной таблицы. Если набор условий окружающей среды должен включать в себя четыре элемента, то потребуется четыре точки данных для нахождения подходящей справочной таблицы, и количество справочных таблиц, хранящихся в памяти, будет экспоненциально увеличиваться.
[0069] Два решения устраняют эту проблему: во-первых, количество элементов в каждом наборе может быть уменьшено или сокращено. Например, RCM может быть выполнен с возможностью учета только некоторых из вышеописанных условий окружающей среды (например, учитывает только температуру и влажность и игнорирует погоду, местоположение и т.д.). Во-вторых, RCM может применять алгоритм оценки, который интерполирует или экстраполирует вероятные данные датчиков аварии, основываясь на ограниченном количестве справочных таблиц.
[0070] Например, если измеренная температура составляет 81 градус по Фаренгейту (27,22°C), то RCM может загружать справочную таблицу, связанную с 80 градусами по Фаренгейту (26,67°C) (т.е. приблизительный элемент температуры). Альтернативно, RCM может интерполировать между справочными таблицами, связанными с 80 градусами по Фаренгейту (26,67°C) и 85 градусами по Фаренгейту (29,44°C).
[0071] В качестве другого примера, если сигналы активности указывают на то, что клаксон выключен, и послепродажная аудиосистема осуществляет воспроизведение на уровне 5, то RCM может интерполировать между (a) первыми данными датчиков аварии, связанными с выключенным клаксоном и послепродажной аудиосистемой, осуществляющей воспроизведение на уровне 4, и (b) вторыми данными датчиков аварии, связанными с выключенным клаксоном и послепродажной аудиосистемой, осуществляющей воспроизведение на уровне 6.
[0072] Следует также понимать, что справочные таблицы являются только одним возможным решением. RCM может применять любой пригодный метод для связи загрязненных данных датчиков аварии с входными данными (например, построение функций наилучшего приближения).
[0073] В блоке 616 RCM определяет запись справочной таблицы, связанную с входными данными блоков 608 и 610. RCM сравнивает загрязненные данные датчиков аварии (например, CSD-1), хранящиеся в определенной записи, с самыми последними загрязненными данными датчиков аварии. Если новые загрязненные данные и определенные загрязненные данные совпадают, то RCM возвращается в блок 602.
[0074] Если данные различны, то RCM может отбросить старые загрязненные данные датчиков аварии и заменить отброшенные загрязненные данные датчиков аварии недавно измеренными загрязненными данными датчиков аварии в блоке 618. Согласно некоторым вариантам осуществления вместо замены старых загрязненных данных датчиков аварии новыми загрязненными данными датчиков аварии RCM сохраняет скользящее среднее загрязненных данных датчиков аварии в течение заданной продолжительности времени и корректирует скользящее среднее для включения новых загрязненных данных датчиков аварии.
[0075] Со ссылкой на Фигуры 4 и 5 в блоке 408 RCM принимает текущие входные данные. Текущие входные данные, как отмечено выше, представляют собой те же виды входных данных, которые RCM принимает в блоках 608 и 610. В блоке 410 RCM применяет принятые входные данные для загрузки соответствующей справочной таблицы. RCM выбирает сохраненные загрязненные данные датчиков аварии (например, CSD-2), основываясь на принятых входных данных.
[0076] С помощью сохраненных данных датчиков аварии (например, CSD-2) RCM выбирает один или более фильтров. Выбранный фильтр позволяет RCM отфильтровывать загрязненные данные датчиков аварии (например, CSD-2) из текущих данных датчиков аварии, собранных в блоке 406. Выходной сигнал блока 412 представляет собой очищенные или отфильтрованные данные датчиков аварии.
[0077] Следует понимать, что способы на Фигурах 4, 5 и 6 применяются к одному датчику аварии. Транспортные средства обычно включают в себя множество датчиков аварии, и, таким образом, способы, связанные с Фигурами 4, 5 и 6, независимо выполняются для каждого из датчиков аварии.
[0078] Со ссылкой на Фигуру 6a следует понимать, что RCM может применять альтернативные условия обучения. Например, RCM может осуществлять способ 600, в то время как транспортное средство находится в движении, чтобы узнать, как вибрации, вызываемые скоростью, влияют на загрязнение от аудиосистем. Однако важно, чтобы RCM не собирало данные датчиков аварии, генерируемые фактическим событием аварии (например, попаданием в выбоину) во время способа 600. В результате, одним из условий обучения может быть стабильное, плавное и/или непрерывное ускорение транспортного средства (например, измеряемое датчиками 151a ускорения RCM). Согласно этим вариантам осуществления скорость транспортного средства и/или ускорение транспортного средства могут быть включены в качестве элементов в наборы локальных условий и, таким образом, могут быть интегрированы в процесс справочной таблицы блока 614.
[0079] Следует также понимать, что аудиомодули 154 не ограничены клаксонами и динамиками. Согласно некоторым вариантам осуществления производящие звуки или вибрации компоненты транспортного средства (например, двигатель или электродвигатель) могут считаться аудиомодулями. Согласно этим вариантам осуществления RCM будет включать в себя сигналы активности от производящих звуки или вибрации компонентов транспортного средства во входных данных блоков 408, 608 и 610 (т.е. будет включать в себя сигналы активности от производящих звуки или вибрации компонентов транспортного средства в наборах сигналов активности). Например, датчик вибрации, такой как акселерометр, установленный на двигателе, может передавать сигнал активности на RCM. RCM может считать сигнал активности от датчика вибрации двигателя входным сигналом от аудиомодуля двигателя. Затем RCM будет сохранять и извлекать загрязненные данные датчиков аварии, основываясь на сигнале активности от двигателя.
[0080] Вышеприведенное раскрытие включает в себя выбор фильтров, которые наилучшим образом вычитают или отфильтровывают загрязненные данные датчиков аварии из текущих данных датчиков аварии. Метод выбора одного или более фильтров для удаления нежелательных или загрязненных данных из измеренных данных известен в уровне техники.
[0081] Такие методы описаны, например, в заявке на патент на имя Jensen (включенной сюда путем ссылки выше). Они дополнительно описаны, например, в (1) «Noise canceling in audio signal with adaptive filter» под авторством Nicolae и Romulus (University of Oradea, том 45, номер 6, 2004 год), (2) «New Methods for Adaptive Noise Suppression» под авторством Arslan и Vishu (IEEE International Conference on Acoustics, Speech and Signal Processing, Май 1995 года) и (3) «Noise Removal in Speech Processing Using Spectral Subtraction» под авторством Karam, Khazaal, Aglan и Cole (Journal of Signal and Information Processing, 2014, 5, 32-41, Май 2014 года). Все из этих документов включены сюда путем ссылки во всей их полноте.
Реферат
Изобретение относится к информационным системам транспортного средства. Транспортное средство содержит аудиосистему, датчик аварии, топливный насос и процессор. Процессор выполнен с возможностью выбора фильтра, основываясь на определенном состоянии аудиосистемы, нахождения ускорения транспортного средства с помощью акселерометров, сравнения найденного ускорения с пороговым значением ускорения, очищения текущих данных датчиков аварии посредством фильтра, основываясь на результате сравнения и определения того, требуется ли деактивация топливного насоса. Достигается повышение безопасности транспортного средства. 10 з.п. ф-лы, 9 ил.
Комментарии