Способ останова двигателя транспортного средства (варианты) и транспортное средство - RU2642012C2
Код документа: RU2642012C2
Чертежи













































Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет по Предварительной заявке 61/643131 на выдачу патента США, поданной 4 мая 2012 года, полное содержание которой настоящим включено в состав посредством ссылки для любых целей.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе и способам улучшения ездовых качеств, выбросов и экономии топлива транспортного средства. Способы могут быть особенно полезны для двигателей, которые избирательно присоединяются к электрической машине и трансмиссии.
УРОВЕНЬ ТЕХНИКИ
Транспортное средство с гибридным приводом может неоднократно останавливаться и запускаться в ходе поездки для сбережения топлива. Если двигатель остановлен в нежелательном положении, может потребоваться больше времени для перезапуска двигателя. Кроме того, выбросы двигателя могут возрастать, если двигатель остановлен в нежелательном положении. Некоторые двигатели останавливают посредством прекращения впрыска топлива в конкретном положении двигателя в попытке остановить двигатель в требуемом положении. Однако условия эксплуатации двигателя могут меняться от останова двигателя к останову двигателя, так что двигатель не всегда останавливается в требуемом положении. Следовательно, двигатель может иногда останавливаться в нежелательном положении, в котором могут возрастать время запуска и выбросы двигателя.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретатели в материалах настоящего описания выявили вышеупомянутые недостатки и разработали способ останова двигателя, включающий в себя этапы, на которых:
регулируют скорость вращения встроенного в привод на ведущие колеса стартера/генератора (DISG) на требуемую скорость вращения, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии в ответ на запрос остановить вращение двигателя; и
осуществляют проскальзывание муфты расцепления привода на ведущие колеса в приводе на ведущие колеса между DISG и двигателем, чтобы останавливать двигатель в требуемом положении.
В одном из вариантов предложен способ, в котором требуемое положение является заданным числом градусов угла поворота коленчатого вала до верхней мертвой точки такта сжатия выбранного цилиндра.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором прекращают поток топлива и зажигание в цилиндры двигателя в ответ на запрос остановить вращение двигателя.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором связывают выходной вал трансмиссии с картером трансмиссии в ответ на запрос остановить вращение двигателя.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором размыкают муфту расцепления привода на ведущие колеса при по существу нулевой скорости вращения двигателя.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором продолжают вращать DISG, при нулевой скорости вращения двигателя.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором вводят в действие и выводят из работы DISG, при нулевой скорости вращения двигателя.
В одном из вариантов предложен способ останова двигателя, включающий в себя этапы, на которых:
смыкают муфту расцепления привода на ведущие колеса в ответ на запрос остановить вращение двигателя;
регулируют скорость вращения встроенного в привод на ведущие колеса стартера/генератора (DISG) на требуемый профиль скорости вращения двигателя, который замедляется до нулевой скорости вращения двигателя; и
размыкают муфту расцепления привода на ведущие колеса на заданной скорости вращения двигателя.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором связывают выходной вал трансмиссии с картером трансмиссии в ответ на запрос остановить двигатель.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором прекращают поток топлива и зажигание в цилиндры двигателя в ответ на запрос остановить двигатель.
В одном из вариантов предложен способ, в котором муфта расцепления привода на ведущие колеса расположена в приводе на ведущие колеса между двигателем и DISG.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором размыкают муфту расцепления привода на ведущие колеса в заданном положении.
В одном из вариантов предложен способ, в котором скорость вращения DISG повышают, когда скорость вращения двигателя меньше, чем требуемый профиль скорости вращения двигателя.
В одном из вариантов предложен способ, в котором скорость вращения DISG снижают, когда скорость вращения двигателя больше, чем требуемый профиль скорости вращения двигателя.
В одном из вариантов предложена система транспортного средства, содержащая:
двигатель;
маховик (DMF) двойной массы, содержащий первую сторону, механически присоединенную к двигателю;
муфту расцепления привода на ведущие колеса, содержащую первую сторону, механически присоединенную к второй стороне маховика двойной массы;
встроенный в привод на ведущие колеса стартер/генератор (DISG), содержащий первую сторону, присоединенную ко второй стороне муфты расцепления привода на ведущие колеса;
трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и
контроллер, содержащий исполняемые команды, хранимые в постоянной памяти, для регулирования работы муфты расцепления привода на ведущие колеса в ответ на запрос остановить вращение двигателя.
В одном из вариантов предложена система, в которой муфта расцепления привода на ведущие колеса смыкается по меньшей мере частично.
В одном из вариантов предложена система, в которой муфта расцепления привода на ведущие колеса смыкается полностью.
В одном из вариантов предложена система, дополнительно содержащая дополнительные команды для размыкания муфты расцепления привода на ведущие колеса при заданной скорости вращения.
В одном из вариантов предложена система, дополнительно содержащая эксплуатацию DISG на скорости вращения, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии.
В одном из вариантов предложена система, дополнительно содержащая дополнительные команды для избирательного вывода из работы DISG при нулевой скорости вращения двигателя.
Посредством регулирования скорости вращения встроенного в привод на ведущие колеса стартера/генератора на скорость вращения, которая обеспечивает требуемое давление масла муфты трансмиссии, и посредством осуществления проскальзывания муфты расцепления привода на ведущие колеса для останова двигателя в требуемом положении, может быть возможным улучшать останов двигателя. В частности, посредством регулирования скорости вращения DISG на скорость вращения, которая дает требуемое давление масла муфты трансмиссии, муфты трансмиссии могут смыкаться во время останова двигателя, чтобы двигатель встречал большее или меньшее сопротивление вращению во время останова двигателя. Таким образом, давления муфты трансмиссии могут регулироваться для управления положением останова двигателя. Например, если положение двигателя является приближающимся к требуемому положению останова, муфты трансмиссии могут смыкаться с дополнительным усилием, чтобы связывать выходной вал трансмиссии с картером трансмиссии, так что некоторое дополнительное сопротивление может прикладываться к двигателю через гидротрансформатор. Дополнительно, проскальзывание муфты гидротрансформатора может уменьшаться во время останова двигателя, пока муфты трансмиссии связывают выходной вал трансмиссии с картером трансмиссии. Кроме того, посредством осуществления проскальзывания муфты расцепления привода на ведущие колеса во время останова двигателя, крутящий момент, прикладываемый к двигателю, может меняться, так что положение останова двигателя может регулироваться, и двигатель замедляется до останова.
Настоящее изобретение может давать несколько преимуществ. Более точно, подход может давать останов двигателя с более высокой повторяемостью. Кроме того, подход может улучшать запуск двигателя посредством обеспечения в большей степени согласующегося положения останова двигателя. Кроме того, еще подход может снижать выбросы двигателя посредством останова двигателя в положении, которое создает меньшие выбросы во время перезапуска двигателя.
Вышеприведенные преимущества и другие преимущества и признаки настоящего изобретения будут без труда очевидны из последующего Подробного описания, когда воспринимается по отдельности или в связи с прилагаемыми чертежами.
Следует понимать, что раскрытие изобретения, приведенное выше, предоставлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества, описанные в материалах настоящего описания, будут более понятны по прочтению примера варианта осуществления, указанного в материалах настоящего описания, когда воспринимается по отдельности или со ссылкой на чертежи, на которых:
фиг. 1 - схематичное изображение двигателя;
фиг. 2 показывает первую примерную конфигурацию привода на ведущие колеса двигателя;
фиг. 3 показывает вторую примерную конфигурацию привода на ведущие колеса двигателя;
фиг. 4 - блок-схема последовательности операций способа, показывающая один из примеров эксплуатации привода на ведущие колеса транспортного средства способами, описанными на последующих фигурах;
фиг. 5-8 показывают блок-схемы последовательности операций способа и условия для приведения в действие силовой передачи транспортного средства с гибридным приводом в ответ на условия маршрута вождения;
фиг. 9-10 показывают способ и прогнозируемую последовательность для регулирования работы силовой передачи в ответ на массу транспортного средства;
фиг. 11-12 показывают способ и прогнозируемую последовательность для пуска в ход транспортного средства с гибридным приводом;
фиг. 13-14 показывают способ и прогнозируемую последовательность для регулирования снабжения топливом для гибридной силовой передачи во время запуска двигателя;
фиг. 15-18 показывают способы и прогнозируемые последовательности для запуска двигателя транспортного средства с гибридным приводом во время переключения передач трансмиссии;
фиг. 19-22 показывают способы и прогнозируемые последовательности для обеспечения компенсации муфты расцепления маховика и привода на ведущие колеса;
фиг. 23-26 показывают способы и прогнозируемые последовательности для останова двигателя транспортного средства с гибридным приводом;
фиг. 27-28 показывают способ и прогнозируемую последовательность для удерживания гибридного транспортного средства с остановленным двигателем на возвышенности;
фиг. 29A-36 показывают способы и прогнозируемые последовательности для приведения в действие силовой передачи двигателя при торможении приводом на ведущие колеса;
фиг. 37-40 показывают способы и прогнозируемые последовательности для приведения в действие гибридной силовой передачи в дрейфовом режиме;
фиг. 41-44 показывают способы и прогнозируемые последовательности для адаптации работы муфты расцепления привода на ведущие колеса; и
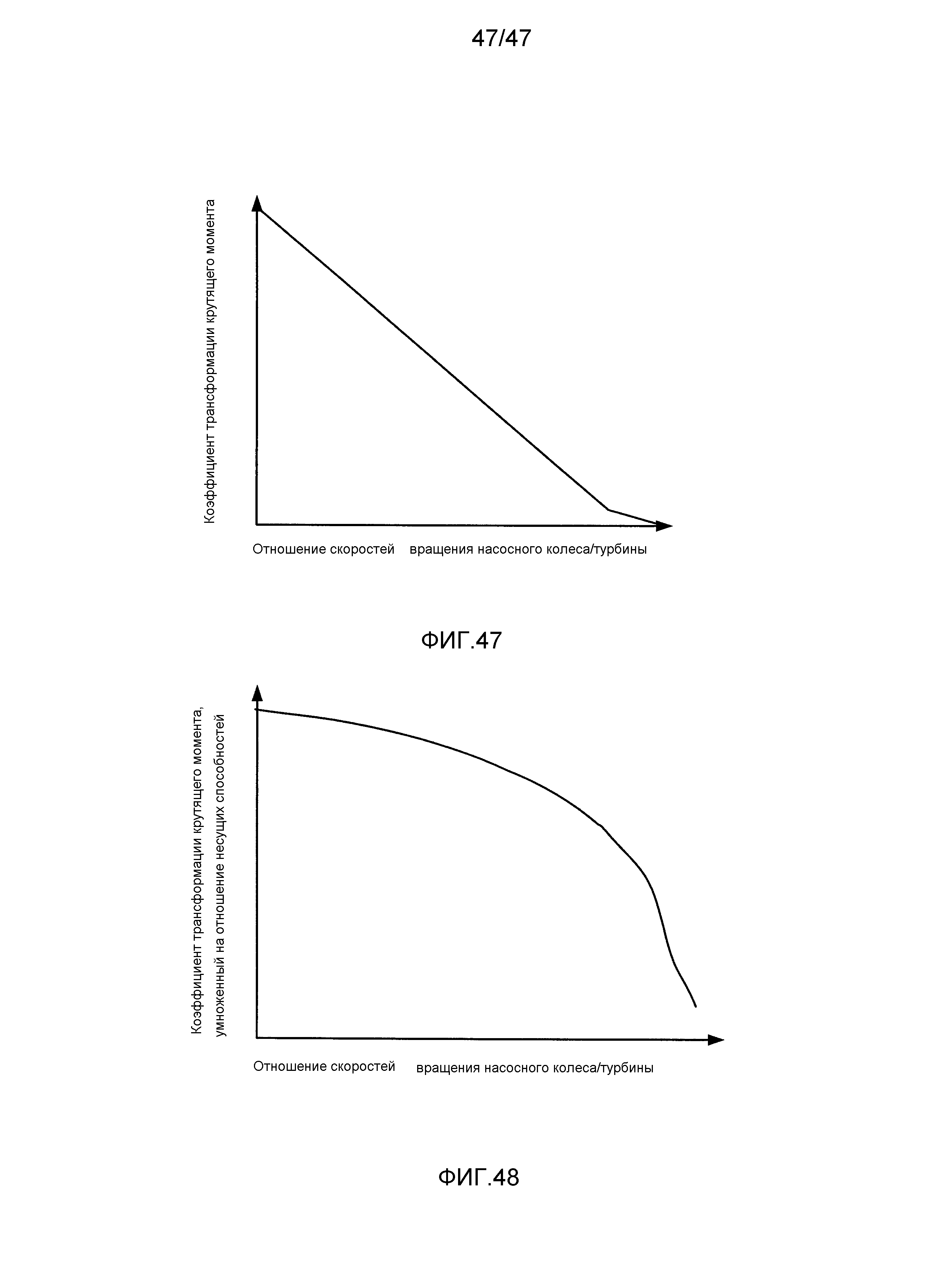
фиг. 45-48 показывают прогнозируемые функции для описания или моделирования гидротрансформатора трансмиссии.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение имеет отношение к управлению приводом на ведущие колеса транспортного средства с гибридным приводом. Транспортное средство с гибридным приводом может включать в себя двигатель и электрическую машину, как показано на фиг. 1-3. Двигатель может эксплуатироваться с или без встроенного в привод на ведущие колеса стартера/генератора (например, электрической машины или электродвигателя, которые могут указываться аббревиатурой DISG) во время работы транспортного средства. Встроенный в привод на ведущие колеса стартер/генератор встроен в привод на ведущие колеса на той же самой оси, что и коленчатый вал двигателя и вращается всякий раз, когда вращается насосное колесо гидротрансформатора. Кроме того, DISG может не быть избирательно зацепляемым или расцепляемым с приводом на ведущие колеса. Скорее, DISG является неотъемлемой частью привода на ведущие колеса. Кроме того еще, DISG может эксплуатироваться с или без приведения в действие двигателя. Масса и инерция DISG остаются с приводом на ведущие колеса, когда DISG не является работающим для обеспечения или приема крутящего момента из привода на ведущие колеса.
Привод на ведущие колеса может приводиться в действие согласно способу по фиг. 4. В некоторых примерах, привод на ведущие колеса может приводиться в действие на основании маршрута вождения и массы транспортного средства, как описано на фиг. 5-10. Двигатель может запускаться согласно способам, показанным на фиг. с 11 по 18. Компенсация компонентов привода на ведущие колеса может быть предусмотрена, как описано на фиг. 19-22. Топливо может сберегаться посредством избирательного останова двигателя, как описано на фиг. 23-28. Привод на ведущие колеса также может входить в режим рекуперации, как описано на фиг. 29A-36, где кинетическая энергия транспортного средства преобразуется в электрическую энергию. Электрическая энергия впоследствии может использоваться для приведения в движение транспортного средства. Во время некоторых условий, привод на ведущие колеса транспортного средства может входить в дрейфовый режим, где двигатель эксплуатируется, но механически не присоединен к DISG или трансмиссии, или колесам транспортного средства, как описано на фиг. 37-40. Работа муфты расцепления привода на ведущие колеса может быть адаптирована, как показано на фиг. с 41 по 44. Способы, описанные в материалах настоящего описания, могут использоваться вместе одновременно, с тем чтобы работать в системе, которая выполняет многочисленные способы. В заключение, фиг. 45-47 показывают прогнозируемые функции для описания гидротрансформатора трансмиссии.
Со ссылкой на фиг. 1, двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один цилиндр которого показан на фиг. 1, управляется электронным контроллером 12 двигателя. Двигатель 10 включает в себя камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в них и присоединенным к коленчатому валу 40. Маховик 97 и зубчатый венец 99 присоединены к коленчатому валу 40. Стартер 96 включает в себя ведущий вал 98 зубчатой передачи и ведущую шестерню 95. Ведущий вал 98 зубчатой передачи может избирательно выдвигать ведущую шестерню 95 для зацепления с зубчатым венцом 99. Стартер 96 может быть установлен непосредственно спереди двигателя или сзади двигателя. В некоторых примерах, стартер 96 может избирательно подавать крутящий момент на коленчатый вал 40 через ремень или цепь. Стартер 96 может быть описан в качестве пускового устройства более низкой мощности. В одном из примеров, стартер 96 находится в базовом состоянии, когда не зацеплен с коленчатым валом двигателя. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответственный впускной клапан 52 и выпускной клапан 54. Каждый впускной клапан и выпускной клапан может приводиться в действие кулачком 51 впускного клапана и кулачком 53 выпускного клапана. Положение кулачка 51 впускного клапана может определяться датчиком 55 кулачка впускного клапана. Положение кулачка 53 выпускного клапана может определяться датчиком 57 кулачка выпускного клапана.
Топливная форсунка 66 показана расположенной для впрыска топлива непосредственно в цилиндр 30, что известно специалистам в данной области техники как непосредственный впрыск. В качестве альтернативы, топливо может впрыскиваться во впускной канал, что известно специалистам в данной области техники в качестве впрыска во впускной канал. Топливная форсунка 66 выдает жидкое топливо пропорционально длительности импульса сигнала FPW из контроллера 12. Топливо подается на топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива (не показана). Топливная форсунка 66 питается рабочим током из формирователя 68, который реагирует на действие контроллера 12. В дополнение, впускной коллектор 44 показан сообщающимся с необязательным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для управления потоком воздуха из воздухозаборника 42 во впускной коллектор 44. В одном из примеров, может использоваться система непосредственного впрыска низкого давления, где давление топлива может подниматься до приблизительно 20-30 бар. В качестве альтернативы, двухкаскадная топливная система высокого давления может использоваться для формирования более высоких давлений топлива. В некоторых вариантах осуществления, дроссель 62 и дроссельная заслонка 64 могут быть расположены между впускным клапаном 52 и впускным коллектором 44, так что дроссель 62 является дросселем окна.
Система 88 зажигания без распределителя выдает искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на действие контроллера 12. Универсальный датчик 126 кислорода выхлопных газов (UEGO) показан присоединенным к выпускному коллектору 48 выше по потоку от каталитического нейтрализатора 70 выхлопных газов. В качестве альтернативы, двухрежимный датчик кислорода выхлопных газов может использоваться вместо датчика 126 UEGO.
Нейтрализатор 70 выхлопных газов, в одном из примеров, включает в себя многочисленные брикеты катализатора. В еще одном примере, могут использоваться многочисленные устройства контроля выбросов, каждое с многочисленными брикетами. Нейтрализатор 70 может быть каталитическим нейтрализатором трехкомпонентного типа, сажевым фильтром, уловителем обедненных NOx, избирательным восстановительным каталитическим нейтрализатором или другим устройством контроля выбросов. Подогреватель 119 устройства контроля выбросов также может быть расположен в системы выпуска для подогрева нейтрализатора 70 и/или выхлопных газов.
Контроллер 12 показан на фиг. 1 в качестве традиционного микрокомпьютера, включающего в себя: микропроцессорный блок 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимую память 110 и традиционную шину данных. Контроллер 12 показан принимающим различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе: температуру охлаждающей жидкости двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; датчика 134 положения, присоединенного к педали 130 акселератора для считывания усилия и/или положения, приложенных ступней 132; датчика 154 положения, присоединенного к тормозной педали 150 для считывания усилия и/или положения, приложенных ступней 152; измерение давления во впускном коллекторе двигателя (MAP) с датчика 122 давления, присоединенного к впускному коллектору 44; датчика положения двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; измерение массы воздуха, поступающего в двигатель, с датчика 120; и измерение положения дросселя с датчика 58. Барометрическое давление также может считываться (датчик не показан) для обработки контроллером 12. В предпочтительном аспекте настоящего описания, датчик 118 положения двигателя вырабатывает заданное количество равномерно разнесенных импульсов каждый оборот коленчатого вала, по которому может определяться скорость вращения двигателя (RPM, в оборотах в минуту).
В некоторых примерах, двигатель может быть присоединен к системе электродвигателя/аккумуляторной батареи в транспортном средстве с гибридным приводом, как показано на фиг. 2 и 3. Кроме того, в некоторых примерах, могут применяться другие конфигурации двигателя, например, дизельный двигатель.
Во время работы, каждый цилиндр в двигателе 10 типично подвергается четырехтактному циклу: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска, обычно, выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух вовлекается в камеру 30 сгорания через впускной коллектор 44, поршень 36 перемещается к дну цилиндра, с тем чтобы увеличивать объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится около дна цилиндра и в конце своего хода (например, когда камера 30 сгорания находится при своем наибольшем объеме), типично указывается специалистами в данной области техники ссылкой как нижняя мертвая точка (НМТ, BDC). Во время такта сжатия, впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке блока цилиндров, с тем чтобы сжимать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и самой близкой к головке блока цилиндров (например, когда камера 30 сгорания находится при своем наименьшем объеме), типично указывается специалистами в данной области техники в качестве верхней мертвой точки (ВМТ, TDC). В процессе, в дальнейшем указываемом ссылкой как впрыск, топливо вводится в камеру сгорания. В процессе, в дальнейшем указываемом ссылкой как воспламенение, впрыснутое топливо воспламеняется известным средством воспламенения, таким как свеча 92 зажигания, приводя к сгоранию. Во время такта расширения, расширяющиеся газы толкают поршень 36 обратно в НМТ. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. В заключение, во время такта выпуска, выпускной клапан 54 открывается, чтобы выпускать подвергнутую сгоранию топливно-воздушную смесь в выпускной коллектор 48, и поршень возвращается в ВМТ. Отметим, что вышеприведенное показано просто в качестве примера, и что установки момента открывания и/или закрывания впускного и выпускного клапанов могут меняться так, чтобы давать положительное или отрицательное перекрытие клапанов, позднее закрывание впускного клапана, или различные другие примеры.
Фиг. 2 - структурная схема привода 200 на ведущие колеса транспортного средства в транспортном средстве 290. Привод 200 на ведущие колеса может быть механизирован двигателем 10. Двигатель 10 может запускаться пусковой системой двигателя, показанной на фиг. 1 или посредством DISG 240. Кроме того, двигатель 10 может вырабатывать или управлять крутящим моментом посредством исполнительного механизма 204 крутящего момента, такого как топливная форсунка, дроссель, и т.д.
Крутящий момент на выходе двигателя может передаваться на входную сторону маховика 232 двойной массы. Скорость вращения двигателя, а также положение и скорость вращения входной стороны маховика двойной массы могут определяться посредством датчика 118 положения двигателя. Маховик 232 двойной массы может включать в себя пружины и отдельные массы (не показаны) для демпфирования возмущений крутящего момента привода на ведущие колеса. Выходная сторона маховика 232 двойной массы показана являющейся механически присоединенной к входной стороне муфты 236 расцепления привода на ведущие колеса. Муфта 236 расцепления привода на ведущие колеса может быть с электрическим или гидравлическим приводом. Датчик 234 положения расположен на стороне муфты расцепления привода на ведущие колеса маховика 232 двойной массы для считывания выходного положения и скорости вращения маховика 232 двойной массы. В некоторых примерах, датчик 234 положения может включать в себя датчик крутящего момента. Расположенная ниже по потоку сторона муфты 236 расцепления привода на ведущие колеса показана механически присоединенной к входному валу 237 DISG.
DISG 240 может приводиться в действие, чтобы обеспечивать крутящий момент на привод 200 на ведущие колеса или преобразовывать крутящий момент привода на ведущие колеса в электрическую энергию, которая должна накапливаться в устройстве 275 накопления энергии. DISG 240 имеет выходную мощность, которая является большей, чем у стартера 96, показанного на фиг. 1. Кроме того, DISG 240 непосредственно приводит в движение привод 200 на ведущие колеса или непосредственно приводится в движение приводом 200 на ведущие колеса. Нет никаких ремней, шестерен или цепей для присоединения DISG 240 к приводу 200 на ведущие колеса. Скорее, DISG 240 вращается на той же самой частоте, что и привод 200 на ведущие колеса. Устройство 275 накопления электрической энергии может быть аккумуляторной батареей, конденсатором или катушкой индуктивности. Расположенная ниже по потоку сторона DISG 240 механически присоединена к насосному колесу 285 гидротрансформатора 206 через вал 241. Расположенная выше по потоку сторона DISG 240 механически присоединена к муфте 236 расцепления привода на ведущие колеса.
Гидротрансформатор 206 включает в себя турбину 286 для вывода крутящего момента на входной вал 270. Входной вал 270 механически присоединяет гидротрансформатор 206 к автоматической трансмиссии 208. Гидротрансформатор 206 также включает в себя обходную блокировочную муфту 212 гидротрансформатора (TCC). Крутящий момент непосредственно передается с насосного колеса 285 на турбину 286, когда TCC блокирована. TCC электрически приводится в действие контроллером 12. В качестве альтернативы, TCC может блокироваться гидравлически. В одном из примеров, гидротрансформатор может указываться ссылкой как компонент трансмиссии. Скорость вращения и положение насосного колеса гидротрансформатора могут определяться посредством датчика 238. Скорость вращения и положение турбины гидротрансформатора могут определяться посредством датчика 239 положения. В некоторых примерах, 238 и/или 239 могут быть датчиками крутящего момента или могут быть комбинированными датчиками положения и крутящего момента.
Когда муфта 212 гидротрансформатора полностью расцеплена, гидротрансформатор 206 передает крутящий момент двигателя на автоматическую трансмиссию 208 посредством переноса текучей среды между турбиной 286 гидротрансформатора и насосным колесом 285 гидротрансформатора, тем самым, давая возможность умножения крутящего момента. В противоположность, когда муфта 212 гидротрансформатора полностью зацеплена, крутящий момент на выходе двигателя передается непосредственно через муфту гидротрансформатора на входной вал 270 трансмиссии 208. В качестве альтернативы, муфта 212 гидротрансформатора может зацепляться частично, тем самым, давая возможность регулироваться величине крутящего момента, передаваемого непосредственно на трансмиссию. Контроллер 12 может быть выполнен с возможностью регулирования величины крутящего момента, передаваемого гидротрансформатором 206, посредством регулирования муфты 212 гидротрансформатора в ответ на различные условия эксплуатации двигателя или на основании основанного на водителе запроса режима работы двигателя.
Автоматическая трансмиссия 208 включает в себя муфты 211 передач (например, шестерни 1-6) и переднюю муфту переднего хода 210. Муфты 211 передач и муфта 210 переднего хода могут избирательно вводиться в зацепление для продвижения транспортного средства. Крутящий момент на выходе из автоматической трансмиссии 208, в свою очередь, может передаваться на колеса 216, чтобы приводить транспортное средство в движение, через выходной вал 260. Выходной вал 260 подает крутящий момент с трансмиссии 308 на колеса 216 через дифференциал 255, который включает в себя первую передачу 257 и вторую передачу 258. Автоматическая трансмиссия 208 может передавать входной вращающий момент на входном валу 270 в ответ на состояние перемещения транспортного средства перед передачей выходного вращающего момента на колеса 216.
Кроме того, сила трения может прикладываться к колесам 216 посредством приведения в действие колесных фрикционных тормозов 218. В одном из примеров, колесные фрикционные тормоза 218 могут приводиться в действие в ответ на нажимание водителем его ступней на тормозную педаль (не показана). В других примерах, контроллер 12 или контроллер, связанный с контроллером 12, могут применять контактные колесные фрикционные тормоза. Таким же образом, сила трения может снижаться в отношении колес 216 посредством отведения колесных фрикционных тормозов 218 в ответ на отпускание водителем своей ступни с тормозной педали. Кроме того, тормоза транспортного средства могут прикладывать силу трения к колесам 216 посредством контроллера 12 в качестве части процедуры автоматического останова двигателя.
Механический масляный насос 214 может находиться в сообщении по текучей среде с автоматической трансмиссией 208, чтобы обеспечивать гидравлическое давление для приведения в действие различных муфт, таких как муфта 210 переднего хода, муфта 211 передач и/или муфта 212 гидротрансформатора. Механический масляный насос 214, например, может приводиться в действие в соответствии с гидротрансформатором 206, и может приводиться в движение вращением входного вала двигателя или DISG через входной вал 241. Таким образом, гидравлическое давление, вырабатываемое в механическом масляном насосе 214, может повышаться по мере того, как увеличиваются скорость вращения двигателя и/или скорость вращения DISG, и может снижаться по мере того, как уменьшается скорость вращения двигателя и/или скорость вращения DISG.
Контроллер 12 может быть выполнен с возможностью приема входных сигналов с двигателя 10, как подробнее показано на фиг. 1, и соответствующим образом управления выходным крутящим моментом двигателя и/или работой гидротрансформатора, трансмиссии, DISG, муфт и/или тормозов. В качестве одного из примеров, крутящий момент на выходном валу двигателя может управляться посредством регулирования комбинации установки момента зажигания, длительности импульса топлива, установки момента импульса топлива и/или заряда воздуха посредством управления открыванием дросселя и/или установкой фаз клапанного распределения, подъемом клапана и давлением наддува для двигателей с нагнетателем и турбонагнетателем. В случае дизельного двигателя, контроллер 12 может управлять крутящим моментом на выходном валу двигателя, управляя комбинацией длительности импульса, установки момента импульса топлива и заряда воздуха. Во всех случаях, управление двигателем может выполняться на основе цилиндр за цилиндром, чтобы управлять крутящим моментом на выходном валу двигателя. Контроллер 12 также может управлять выходным крутящим моментом и выработкой электрической энергии из DISG посредством регулирования тока, втекающего в и из обмоток DISG, как известно в данной области техники.
Когда условия остановки на холостом ходу удовлетворены, контроллер 12 может инициировать остановку двигателя посредством отключения топлива и зажигания у двигателя. Однако, двигатель может продолжать вращаться в некоторых примерах. Кроме того, для поддержания величины кручения в трансмиссии, контроллер 12 может заземлять вращающиеся элементы трансмиссии 208 в картер 259 трансмиссии и тем самым, на раму транспортного средства. В частности, контроллер 12 может вводить в зацепление одну или более муфт трансмиссии, таких как муфта 210 прямого хода, и блокировать введенную в зацепление муфту(ы) трансмиссии по отношению с картером 259 трансмиссии и каркасу транспортного средства, как описано в заявке № 12/833,788 на выдачу патента США «СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ, КОТОРЫЙ МОЖЕТ АВТОМАТИЧЕСКИ ОСТАНАВЛИВАТЬСЯ» («METHOD FOR CONTROLLING AN ENGINE THAT MAY BE AUTOMATICALLY STOPPED»), которая настоящим фактически полностью включена в состав посредством ссылки. Давление муфт трансмиссии может меняться (например, повышаться), чтобы регулировать состояние зацепления муфты трансмиссии и обеспечивать требуемую величину кручения трансмиссии.
Давление колесных тормозов также может регулироваться во время отключения двигателя на основании давления муфты трансмиссии, чтобы содействовать удерживания трансмиссии наряду с уменьшением крутящего момента, передаваемого через колеса. Более точно, посредством применения колесных тормозов 218 наряду с блокировкой одной или более зацепленных муфт трансмиссии, противодействующие силы могут прикладываться к трансмиссии и, следовательно, к приводу на ведущие колеса, тем самым, сохраняя промежуточную передачу в активном зацеплении, и потенциальную энергию кручения в зубчатой передаче трансмиссии, не двигая колеса. В одном из примеров, давление колесных тормозов может регулироваться, чтобы координировать применение колесных тормозов с блокировкой зацепленной муфты трансмиссии во время остановки двигателя. По существу, посредством регулирования давления колесных тормозов и давления муфты, может регулироваться величина кручения, удерживаемая в трансмиссии, когда двигатель остановлен.
Когда удовлетворены условия запуска, и/или водитель транспортного средства желает пустить в ход транспортное средство, контроллер 12 может повторно ввести в действие двигатель, возобновляя сгорание в цилиндрах. Как дополнительно конкретизировано со ссылкой на фиг. 11-18, двигатель может запускаться многообразием способов.
Транспортное средство 290 также может включать в себя передний 294 и задний 292 обогреватели ветрового стекла. Обогреватели 294 и 292 ветрового стекла могут приводиться в действие электрически и быть встроенными в или присоединенными к переднему и заднему ветровым стеклам 295 и 293 транспортного средства. Транспортное средство 290 также может включать в себя фары 296, которые могут быть или могут не быть видимыми водителю, в то время как водитель управляет транспортным средством 290. Транспортное средство 290 также может включать в себя топливный насос 299 с электроприводом, который подает топливо в двигатель 10 во время выбранных условий. В заключение, транспортное средство 290 может включать в себя электроотопитель 298, который избирательно подает тепло в воздух в кабине транспортного средства или окружающий воздух вне транспортного средства 290.
Далее, со ссылкой на фиг. 3, показана вторая примерная конфигурация привода на ведущие колеса транспортного средства. Многие из элементов в приводе 300 на ведущие колеса подобны элементам привода 200 на ведущие колеса и используют эквивалентные номера. Поэтому, ради краткости, описание элементов, которые являются общими между фиг. 2 и фиг. 3, опущено. Описание фиг. 3 ограничено элементами, которые отличаются от элементов по фиг. 2.
Привод 300 на ведущие колеса включает в себя трансмиссию 308 с двойным сцеплением - двойным промежуточным валом. Трансмиссия 308 является по существу ручной трансмиссией с автоматическим управлением. Контроллер 12 управляет первым сцеплением 310, вторым сцеплением 314 и механизмом 315 переключения для осуществления выбора между передачами 317 (например, 1ой-5ой передач). Первое сцепление 310 и второе сцепление 314 могут избирательно размыкаться и смыкаться для переключения между передачами 317.
Системы по фиг. 1-3 могут включать в себя датчики крутящего момента, которые могут быть основой для регулирования работы привода на ведущие колеса. В качестве альтернативы, сам гидротрансформатор может использоваться в качестве датчика крутящего момента, когда муфта 212 гидротрансформатора полностью расцеплена. Более точно, выходной крутящий момент разомкнутого гидротрансформатора является функцией входной и выходной скоростей вращения, скоростей вращения насосного колеса и турбины, где насосное колесо на входе гидротрансформатора, а турбина на выходе гидротрансформатора. В применении по фиг. 2/3, скорость вращения насосного колеса равна измеренной скорости вращения DISG, так как выходной вал ротора DISG является входным валом насосного колеса, а скорость вращения турбины измеряется и используется в регуляторе управления муфтой трансмиссии.
Дополнительно, при заданной характеристике входной и выходной скорости вращения разомкнутого гидротрансформатора, выходной крутящий момент разомкнутого гидротрансформатора может регулироваться посредством управления частотой вращения насосного колеса гидротрансформатора в качестве функции скорости вращения турбины гидротрансформатора. DISG может эксплуатироваться в режиме с обратной связью по скорости вращения для регулирования крутящего момента гидротрансформатора. Например, командная скорость вращения DISG (например, такая как скорость вращения насосного колеса гидротрансформатора) является функцией скорости вращения турбины гидротрансформатора. Командная скорость вращения DISG может быть определена в качестве функции как скорости вращения DISG, так и скорости вращения турбины, чтобы обеспечивать требуемый крутящий момент на выходе гидротрансформатора.
Возмущения привода на ведущие колеса в системах по фиг. 1-3 также могут уменьшаться посредством муфты расцепления привода на ведущие колеса. Один из примерных подходов размыкает муфту гидротрансформатора перед приведением в действие муфты расцепления привода на ведущие колеса. Например, муфта расцепления привода на ведущие колеса может размыкаться, когда двигателю дается команда выключиться, во время состояния рекуперативного торможения транспортного средства, и/или когда транспортное средство останавливается, а двигатель выключается.
В еще одном примере, во время рекуперативного торможения, муфта расцепления привода на ведущие колеса может быть разомкнута, двигатель может быть остановлен, и гидротрансформатор может блокироваться, для того чтобы повышать тормозной момент, который может поглощаться в DISG 240. После того, как двигатель выключен, муфта расцепления привода на ведущие колеса остается разомкнутой до начала процесса перезапуска двигателя. Во время перезапуска двигателя, муфта расцепления привода на ведущие колеса может частично смыкаться, чтобы проворачивать коленчатый вал двигателя до первого события сгорания в цилиндре. В качестве альтернативы, муфта расцепления привода на ведущие колеса может частично смыкаться до тех пор, пока двигатель не достигает заданной скорости вращения после того, как инициировано сгорание в цилиндре. Как только сгорание в двигателе перезапущено в достаточной мере, а скорость вращения двигателя и скорость вращения муфты расцепления привода на ведущие колеса достаточно близки (например, в пределах порогового значения скорости вращения в минуту), несущая способность муфты расцепления привода на ведущие колеса наращивается для смыкания и удерживания без проскальзывания. Во время наращивания муфты расцепления привода на ведущие колеса, могут присутствовать возмущения крутящего момента на выходе муфты расцепления привода на ведущие колеса. Следовательно, обратная связь по крутящему моменту из разомкнутого гидротрансформатора или датчика крутящего момента может быть основой для регулирования установки скорости вращения DISG. Приведение в действие DISG в режиме управления скоростью вращения может предоставлять требуемым значениям крутящего момента возможность поддерживаться с большей согласованностью до тех пор, пока муфта расцепления привода на ведущие колеса не сомкнута полностью. После того, как муфта расцепления привода на ведущие колеса сомкнута, муфта гидротрансформатора (TCC) может блокироваться на основании плана блокировки (например, TCC может приводиться в действие на основании положения педали акселератора и скорости транспортного средства).
Таким образом, муфта гидротрансформатора может быть полностью разомкнута перед началом процесса перезапуска двигателя. Муфта гидротрансформатора может смыкаться после того, как двигатель перезапустился, и муфта расцепления привода на ведущие колеса полностью сомкнулась. Дополнительно, в то время как муфта расцепления привода на ведущие колеса смыкается, давление у муфты расцепления привода на ведущие колеса известно (так как оно указывается командой контроллером) и, в силу этого, имеется в распоряжении оценка среднего крутящего момента муфты сцепления привода на ведущие колеса. Для дополнительного улучшения работы, эта оценка крутящего момента или несущей способности муфты расцепления привода на ведущие колеса может использоваться контроллером в качестве входного сигнала прямой связи в регулятор скорости вращения DISG с обратной связью для улучшения характеристики подавления возмущений. Несущая способность муфты расцепления привода на ведущие колеса, которая основана на оценке крутящего момента, затем может добавляться в качестве входного сигнала во внутренний контур обратной связи по крутящему моменту в электрической машине (DISG). Внутренний контур является внутренним токовым контуром, который может быть основой для улучшения характеристики DISG, когда DISG находится в режиме с обратной связью по скорости вращения.
Таким образом, один из примерных подходов для эксплуатации транспортного средства, имеющего привод на ведущие колеса, такой как привод на ведущие колеса, описанный со ссылкой на фиг. 2-3, включает в себя первую эксплуатацию с остановленным транспортным средством или со скоростью ниже порогового значения, и с двигателем в состоянии покоя и разомкнутой муфтой расцепления привода на ведущие колеса. Затем, при полностью разблокированном гидротрансформаторе, способ включает в себя прием запроса пустить в ход транспортное средство, к примеру, на основании входного сигнала водительской педали, возрастающего сверх пороговой величины. В ответ, двигатель подвергается проворачиванию коленчатого вала и запускается с помощью одного или более из DISG 240 и стартерного электродвигателя, в то время как муфта расцепления привода на ведущие колеса сомкнута, вновь по-прежнему с разблокированным гидротрансформатором. Во время этой работы, обратная связь по крутящему моменту из входной/выходной скоростей вращения гидротрансформатора используется для оценки крутящего момента на валу 241, который сравнивается с требуемым значением крутящего момента и, она выдает регулирование в отношении установки скорости вращения DISG 240, который находится в режиме управления скоростью вращения. Например, установка скорости вращения может быть параметром регулирования, который сводит к нулю ошибку крутящего момента между оцененным и требуемым крутящим моментом на валу 241.
В дополнение к вышеприведенной операции, также могут предприниматься дополнительные управляющие воздействия, в частности в отношении прохождения люфта. Например, когда водитель резко нажимает педаль акселератора, в то время как двигатель находится в режиме рекуперации с отключенным двигателем (например, в состоянии покоя), привод на ведущие колеса переключается в отрицательного крутящего момента на положительный крутящий момент, двигатель запускается, а муфта расцепления привода на ведущие колеса смыкается, причем, все из этих действий координируются, с тем чтобы привносить минимальные возмущения крутящего момента на колесах. В выбранных условиях, эти действия выполняются наряду с поддержанием трансмиссии 208 на постоянной передаче (например, без переключения передачи трансмиссии). Однако, запуск двигателя и прохождение люфта могут формировать такие возмущения. По существу, во время переключения, крутящий момент привода на ведущие колеса может регулироваться с небольшого отрицательного до небольшого положительного крутящего момента во время прохождения люфта, а затем на требуемый крутящий момент. Такое ограничение крутящего момента двигателя, однако, может привносить задержку в подачу требуемого водителем крутящего момента, которая, когда добавляется к задержке перезапуска двигателя, может вызывать значительную неудовлетворенность водителя.
В одном из подходов, может использоваться координация несущей способности обходной муфты 212 гидротрансформатора и выходной мощности DISG 240. Например, установка момента перевода DISG с регулирования крутящего момента на регулирование скорости вращения может выравниваться с условиями перезапуска двигателя и переходом через область люфта для снижения возмущений в отношении привода на ведущие колеса, вызванных запуском двигателя и прохождением через область люфта.
В одном из примеров, предусмотрена эксплуатация для условий, где водитель является применяющим тормоза, и транспортное средство находится в режиме рекуперации, двигатель отключен, муфта расцепления привода на ведущие колеса полностью разомкнута и DISG является поглощающим крутящий момент. DISG является вырабатывающим требуемый уровень тормозного момента (и, например, накапливающим вырабатываемое электричество в аккумуляторной батарее). Во время этих условий, привод на ведущие колеса подвергается отрицательному крутящему моменту, а обходная муфта 212 гидротрансформатора заблокирована. Величина отрицательного крутящего момента на DISG может повышаться и прикладываться через привод на ведущие колеса, с тем чтобы увеличивать рекуперацию. Величина отрицательного крутящего момента может быть основана на требуемом тормозном моменте колес для существующих условий эксплуатации. Отрицательное торможение может быть основано на степени, с которой водитель приводит в действие тормоз. Однако, отрицательное торможение также может происходить, в то время как отпустил как тормозную педаль, так и педаль акселератора.
Когда водитель отпускает тормоз (если она применялась) и резко нажимает на педаль акселератора, транспортное средство переходит на работу с включенным двигателем с положительным крутящим моментом привода на ведущие колеса, выдающим требуемый уровень крутящего момента. Как отмечено выше, во время этого перехода, без переключений передачи трансмиссии, крутящий момент проходит через нулевой крутящий момент (зону люфта), и двигатель подвергается проворачиванию коленчатого вала и запускается. Изобретатели в материалах настоящего описания осознали, что возмущения крутящего момента проворачивания коленчатого вала двигателя находятся выше по потоку от муфты 212, но возмущение люфта ниже по потоку от муфты 212. Несущая способность муфты 212 может координироваться с частотой вращения DISG для ослабления этих возмущений привода на ведущие колеса.
Например, несущая способность TCC 212 может снижаться достаточно, чтобы предоставлять возможность регулируемого проскальзывания по мере того, как снижается крутящий момент рекуперации. Такая работа может помогать изолировать привод на ведущие колеса от возмущений крутящего момента проворачивания коленчатого вала двигателя. По мере того, как крутящий момент рекуперации DISG переходит с текущего значения вплоть до нулевого крутящего момента, привод на ведущие колеса может переходить с большого отрицательного крутящего момента вплоть до почти нулевого крутящего момента. Возле нулевого крутящего момента, привод на ведущие колеса может входить в область люфта. Управление DISG затем переключается с режима регулирования крутящего момента в режим управления скоростью вращения, и частота (Ni) вращения насосного колеса гидротрансформатора регулируется на постоянную скорость вращения выше частоты (Nt) вращения турбины гидротрансформатора.
Регулирование скорости вращения насосного колеса гидротрансформатора таким образом дает небольшой положительный крутящий момент в во время прохождения области люфта и уменьшает возмущение в отношении привода на ведущие колеса, ассоциативно связанное с прохождением области люфта. Требуемая скорость вращения DISG может повышаться, чтобы обеспечивать крутящий момент на колеса и обеспечивать некоторое ускорение транспортного средства. Оценка величины крутящего момента, требуемого для проворачивания коленчатого вала двигателя, может определяться контроллером для обеспечения упреждающей команды крутящего момента DISG. Упреждающая команда крутящего момента DISG может снижать возмущения скорости вращения насосного колеса гидротрансформатора, в то время как муфта расцепления привода на ведущие колеса вводится в зацепление, и двигатель подвергается проворачиванию коленчатого вала. Несущая способность муфты расцепления привода на ведущие колеса регулируется для снижения возмущений привода на ведущие колеса. Как только двигатель запустился, и муфта расцепления привода на ведущие колеса сомкнута, двигатель может подвергаться переходу на регулирование крутящего момента и обеспечивать требуемый крутящий момент.
Как описано выше в материалах настоящего описания со ссылкой на систему по фиг. 1-3, например, возмущения крутящего момента могут происходить, когда приводится в действие муфта расцепления привода на ведущие колеса. Возмущения крутящего момента могут приводить к ухудшенным ездовым качествам и NVH. Например, возмущения крутящего момента (например, обусловленные ошибкой приведения в действие муфты или прерывистым проскальзыванием муфты, либо ошибкой между командным и фактическим крутящим моментом двигателя), на выходе муфты расцепления привода на ведущие колеса могут передаваться на вход трансмиссии и на колеса в качестве функции состояния муфты трансмиссии (например, степени зацепления муфты расцепления привода на ведущие колеса, к примеру, на основании коэффициента давления или скольжения) и передаточного отношения трансмиссии.
Крутящий момент, вырабатываемый посредством DISG 240, в некоторых примерах может быть функцией трехфазного тока. Крутящий момент 241 на выходном валу DISG является суммой крутящего момента на выходном валу DISG и крутящего момент на входе DISG или электрической машины. DISG может даваться команда модулем управления силовой передачей (например, контроллером 12) для приведения в действие в режиме с обратной связью по скорости вращения или в режиме крутящего момента. Контроллер управляет скоростью вращения или крутящим моментом. Контроллер или инвертер использует обратную связь по датчику скорости вращения DISG или току DISG, чтобы создавать требуемые скорость вращения или крутящий момент.
Например, крутящий момент DISG может выводиться из функции или таблицы, которая включает в себя определенные опытным путем значения крутящего момента DISG на основании скорости вращения и тока DISG. В некоторых конструкциях, выход DISG присоединен к пусковой муфте, которая модулируется во время событий переключения, чтобы профилировать или сглаживать крутящий момент на выходном валу DISG перед тем, как он передается на колеса. В других применениях, выход DISG присоединен к гидротрансформатору 206 с блокировочной муфтой. В конструкциях, которые используют пусковую муфту вместо гидротрансформатора, способность пусковой муфты точно и быстро управлять крутящим моментом муфты на низких уровнях крутящего момента может быть требующей преодоления трудностей. Например, пусковая муфта может проскальзывать в присутствии максимального выходного крутящего момента двигателя плюс DISG. Поэтому, пусковая муфта может быть сконструирована с высокой несущей способностью по крутящему моменту. Однако, может быть трудным точно управлять пусковой муфтой на низких уровнях крутящего момента, которые могут использоваться во время перезапуска двигателя и во время пуска в ход транспортного средства с нулевой и/или низких скоростей транспортного средства.
Один из подходов для регулирования и управления пусковой муфтой состоит в том, чтобы использовать датчик крутящего момента, который установлен на входном валу пусковой муфты. Установка датчика крутящего момента наносит профилированный магнитный слой на входном валу пусковой муфты, который вырабатывает выходной сигнал напряжения, который пропорционален крутящему моменту на валу. Напряжение считывается бесконтактным датчиком(ами) и системой датчиков. Сигнал крутящего момента с датчика крутящего момента затем может использоваться для управления DISG в режиме с обратной связью по крутящему моменту с замкнутым контуром, чтобы нейтрализовать возмущения крутящего момента, которые появляются на выходе муфты расцепления привода на ведущие колеса (входе DISG). Если автоматическая трансмиссия использует муфту гидротрансформатора на входе трансмиссии, датчик крутящего момента может быть установлен на входном валу гидротрансформатора. Датчик крутящего момента на входном валу гидротрансформатора может использоваться для обеспечения обратной связи в контроллере DISG, чтобы подавлять возмущения крутящего момента, передаваемые муфтой расцепления привода на ведущие колеса.
Как описано в материалах настоящего описания, двигатель может выключаться, для обнуления скорости вращения (а муфта расцепления привода на ведущие колеса размыкаться), чтобы снижать расход топлива, когда водитель отпускает педаль акселератора. Поэтому, двигатель выключается, когда транспортное средство останавливается, или, в другой раз, когда крутящий момент из DISG не достаточен, чтобы разгонять транспортное средство или преодолевать дорожную нагрузку когда водитель применяет педаль акселератора, и требуемый крутящий момент превышает тот, который может обеспечивать DISG, двигатель перезапускается, чтобы дополнять крутящий момент на выходном валу DISG. В дополнение, двигатель может перезапускаться во время состояния движения накатом, если состояние заряда аккумуляторной батареи падает ниже минимального порогового значения. Двигатель может перезапускаться, чтобы обеспечивать положительный крутящий момент привода на ведущие колеса и обеспечивать крутящий момент, чтобы предоставлять DISG возможность работать в качестве генератора для подзарядки аккумуляторной батареи. Во время процесса перезапуска двигателя, муфта расцепления привода на ведущие колеса или отдельный стартерный электродвигатель могут использоваться для проворачивания коленчатого вала двигателя в зависимости от условий эксплуатации, как описано в материалах настоящего описания. Как только начинается сгорание в двигателе, либо двигатель разгоняется, чтобы соответствовать входной скорости вращения DISG, либо регулируется зацепление/проскальзывание муфты расцепления привода на ведущие колеса посредством давления муфты, чтобы осаживать двигатель до входной скорости вращения DISG. По мере того, как муфта расцепления привода на ведущие колеса смыкается, большое возмущение крутящего момента может вырабатываться на выходе муфты расцепления привода на ведущие колеса, которое затем может передаваться на выход DISG. Возмущение крутящего момента потенциально может передаваться на выход трансмиссии и колеса, тем самым, ухудшая ездовые качества и NVH транспортного средства.
Различные подходы могут использоваться для снижения влияния этого возмущения крутящего момента перезапуска двигателя, такие как те, которые уже были описаны в материалах настоящего описания. В качестве альтернативы или дополнительно, один из способов для уменьшения амплитуды возмущения крутящего момента перезапуска двигателя на выходе муфты расцепления привода на ведущие колеса состоит в том, чтобы приводить скорость вращения коленчатого вала двигателя в соответствие выходной скорости вращения муфты расцепления привода на ведущие колеса или DISG (так как эти два соединены валом) до того, как смыкается муфта расцепления привода на ведущие колеса. Такой подход пользуется зависимостью крутящего момента на выходном валу муфты расцепления привода на ведущие колеса от перепада скоростей вращения на муфте расцепления привода на ведущие колеса. В частности, крутящий момент на выходном валу муфты расцепления привода на ведущие колеса эффективно умножается на знак перепада входной и выходной скоростей вращения муфты расцепления привода на ведущие колеса. Например, он приблизительно равен знаку (скорость вращения коленчатого вала - скорость вращения DISG). Чем ближе совпадают эти частоты, тем ниже крутящий момент на выходном валу муфты расцепления привода на ведущие колеса.
Несмотря на то, что такой подход может использоваться для снижения возмущения крутящего момента на выходном валу муфты расцепления привода на ведущие колеса, он действует, чтобы разгонять скорость вращения двигателя до выходной скорости вращения муфты расцепления привода на ведущие колеса. Выходная скорость вращения муфты расцепления привода на ведущие колеса может меняться от 750 до 3000 оборотов в минуту. Разгон двигателя до скорости вращения в этом диапазоне может задерживать пуск в ход с приводом от двигателя и реакцию на резкое нажатие педали акселератора водителем. Например, до тех пор, пока муфта расцепления привода на ведущие колеса не сомкнута, двигатель либо не выдает никакого крутящего момента на входе трансмиссии, либо действует в качестве тормозящей силы (например, если скорость вращения коленчатого вала < скорости вращения DISG, то крутящий момент на выходном валу муфты расцепления привода на ведущие колеса отрицателен). Если водитель резко нажимает педаль акселератора (например, при вдавленной педали акселератора), и DISG не имеет достаточной несущей способности по крутящему моменту на текущей скорости вращения DISG, то требуемый крутящий момент может не обеспечиваться до тех пор, пока муфта расцепления привода на ведущие колеса не сомкнута, и двигатель не способен обеспечивать положительный крутящий момент.
Таким образом, в некоторых условиях, может быть желательно использовать муфту расцепления привода на ведущие колеса для осаживания скорости вращения двигателя до скорости вращения DISG, чтобы быстрее смыкать муфту расцепления привода на ведущие колеса и обеспечивать положительный крутящий момент на выходе DISG. Трудность со смыканием муфты расцепления привода на ведущие колеса, в то время как двигатель является разгоняющимся до скорости вращения DISG вновь, состоит в том, что крутящий момент на выходе муфты расцепления привода на ведущие колеса является функцией знака (скорость вращения коленчатого вала - скорость вращения DISG). Если DISG используется для разгона инерции коленчатого вала и маховика двойной массы, то разность между крутящим моментом сгорания в двигателе и крутящим моментом DISG, который прикладывается для достижения заданного уровня ускорения, будет появляться на выходе DISG в качестве отрицательного крутящего момента, который затем будет резко изменять знак на положительный крутящий момент, когда скорость вращения коленчатого вал (или выходная скорость вращения маховика двойной массы) превышает скорость вращения DISG.
Изменение крутящего момента на выходном валу муфты расцепления привода на ведущие колеса может создавать пик крутящего момента на входе DISG, который может передаваться на вход трансмиссии и/или колеса. Поэтому, DISG может эксплуатироваться в качестве устройства подавления возмущений крутящего момента, чтобы снижать увеличение крутящего момента перезапуска двигателя. Крутящий момент на выходе DISG является суммой крутящего момента на выходном валу DISG и крутящего момента на выходном валу муфты расцепления привода на ведущие колеса. Управление DISG может быть основано на выявлении возмущения крутящего момента на одном или более из выхода муфты расцепления привода на ведущие колеса, на выходе DISG, на выходе гидротрансформатора и/или на выходе трансмиссии. Датчик крутящего момента может предоставлять DISG возможность непосредственно подавлять возмущение крутящего момента. Такое считывание крутящего момента может быть предусмотрено посредством бесконтактного датчика крутящего момента на валу трансмиссии.
Если такой датчик приложен к валу между муфтой расцепления привода на ведущие колеса и ротором DISG, считанный крутящий момент может вводиться в управление DISG для создания противоположного крутящего момента для нейтрализации пика крутящего момента на выходном валу муфты расцепления привода на ведущие колеса при перезапуске двигателя. В качестве альтернативы, датчик крутящего момента может быть расположен на валу между ротором DISG и гидротрансформатором (или насосным колесом). В таком примере, инерция и ускорение ротора DISG включены и учтены в расчете упреждающего подавления возмущения. Кроме того, может применяться датчик крутящего момента на входном или выходном валу трансмиссии. Если применяется датчик крутящего момента на выходном валу трансмиссии, член крутящего момента подавления возмущения может включать в себя компенсацию инерций трансмиссии и, по выбору, состояний муфт.
Далее, со ссылкой на фиг. 4, показана блок-схема последовательности операций примерного способа для приведения в действие привода на ведущие колеса транспортного средства способами по фиг. 5-47. Способ по фиг. 4 и последующие способы могут храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг. 1-3. Кроме того, вертикальные метки, такие как T0-T8, показанные на фиг. 10, указывают интересующие моменты времени в течение проиллюстрированных последовательностей.
На 402, способ 400 определяет условия эксплуатации. Условия эксплуатации могут включать в себя, но не в качестве ограничения, запрос крутящего момента, скорость вращения двигателя, крутящий момент двигателя, скорость вращения и крутящий момент DISG, скорость транспортного средства, температуру и давление окружающей среды и состояние заряда аккумуляторной батареи. Потребление крутящего момента может подаваться с педали 130 акселератора и контроллера 12 по фиг. 1. Способ 400 переходит на 404 после того, как определены условия эксплуатации.
На 404, способ 400 регулирует работу и рабочие параметры привода на ведущие колеса согласно способам по фиг. 5-8. В частности, способ 400 регулирует работу привода на ведущие колеса в ответ на условия маршрута вождения и/или поведения водителя. Способ 400 переходит на 406 после того, как отрегулированы работа и условия эксплуатации привода на ведущие колеса.
На 406, способ 400 регулирует работу привода на ведущие колеса или силовой передачи под массу транспортного средства, как описано на фиг. 9 и 10. В одном из примеров, временные характеристики и условия для останова двигателя могут регулироваться в ответ на массу транспортного средства, так чтобы могли уменьшаться износ и количество изменений состояния муфты расцепления привода на ведущие колеса. Способ 400 переходит на 408 после того, как отрегулирована работа привода на ведущие колеса под массу транспортного средства.
На 408, способ 400 оценивает, требуется или нет запуск двигателя. Запуск двигателя может запрашиваться посредством входного сигнала ключа зажигания или нажимной кнопки водителя, который имеет единственную функцию запрашивания запуска и/или останова двигателя. В качестве альтернативы, перезапуск двигателя может автоматически запрашиваться контроллером 12 на основании условий эксплуатации, не включающих в себя приведение в действие водителем устройства, которое имеет единственную функцию запрашивания останова или запуска двигателя. Например, контроллер 12 может запрашивать запуск двигателя в ответ на отпускание водителем тормозной педали водителем или в ответ на состояние заряда аккумуляторной батареи. Таким образом, запрос для перезапуска двигателя может инициироваться посредством входных сигналов, которые имеют функции, иные чем только запрашивание запуска двигателя. Если способ 400 делает вывод, что запрошен перезапуск двигателя, способ 400 переходит на 410. Иначе, способ 400 переходит на 418.
На 410, способ 400 выбирает устройство для запуска двигателя, как описано на фиг. 11 и 12. В одном из примеров, двигатель может запускаться посредством стартера, который имеет более низкую выходную мощность, чем DISG. В еще одном примере, двигатель может запускаться посредством DISG, в то время как стартер с более низкой выходной мощностью остается выведенным из работы. Способ 400 переходит на 412 после того, как выбрано средство запуска двигателя.
На 412, способ 400 регулирует установку момента впрыска топлива одной или более топливных форсунок непосредственного впрыска, подающих топливо в двигатель, как описано на фиг. 13 и 14. Установка момента впрыска топлива регулируется для обеспечения одиночного или многочисленных впрысков топлива в течение цикла одиночного цилиндра. Посредством регулирования установки момента впрыска топлива, профиль скорости вращения двигателя во время увеличения скорости вращения (например, разгона двигателя со скорости вращения проворачивания коленчатого вала (например, 250 оборотов в минуту) до требуемой скорости вращения холостого хода двигателя). Способ 400 переходит на 414 после того, как отрегулирована установка момента впрыска топлива.
На 414, способ 400 оценивает, является или нет запуск двигателя связанным с переключением трансмиссии. Например, способ 400 оценивает, желательно ли запустить двигатель на основании переключения с одной передачи трансмиссии на другую передачу трансмиссии. Если способ 400 делает вывод, что желательно запустить двигатель на основании переключения передач трансмиссии или предсказанного переключения передач трансмиссии, способ 400 переходит на 416. Иначе, способ 400 переходит на 418.
На 416, способ 400 запускает двигатель во время переключения передачи трансмиссии, как описано на фиг. 15-18. В одном из примеров, двигатель может запускаться до того, как муфта передачи размыкается или смыкается во время переключения. Способ 400 переходит на 418 после запуска двигателя.
На 418, способ 400 обеспечивает компенсацию маховика двойной массы (DMF). Кроме того, способ 400 может обеспечивать компенсацию муфты расцепления привода на ведущие колеса. Компенсация DMF может демпфировать передачу крутящего момента через DMF, регулируя крутящий момент DISG и/или скорость вращения, а также крутящий момент муфты расцепления привода на ведущие колеса. Компенсация DMF обеспечивается, как описано на фиг. 19-22. Способ 400 переходит на 420, как только инициирована компенсация DMF.
На 420, способ 400 оценивает, желательно или нет остановить двигатель из вращения. Способ 400 может делать вывод, что желательно остановить двигатель из вращения во время условий низкого потребления крутящего момента и/или других условий. Способ 400 переходит на 422, если делается вывод, что желательно остановить двигатель из вращения. Способ 400 переходит на 420, если делается вывод, что не следует останавливать двигатель из вращения.
На 422, способ 400 регулирует профиль останова двигателя. В одном из примеров, скорость вращения двигателя во время замедления двигателя до нулевой скорости вращения регулируется, так что положение двигателя на нулевой скорости вращения двигателя является желательным для перезапуска двигателя. Профиль останова двигатель может регулироваться, как описано на фиг. 23-26. Способ 400 переходит на 424 после того, как профиль останова двигателя был выбран и/или отрегулирован.
На 424, способ 400 регулирует работу силовой передачи под условия удерживания на возвышенности. В одном из примеров, силовая передача избирательно регулируется в ответ на уклон дороги транспортного средства. Способ 400 переходит на выход после того, как силовая передача отрегулирована в ответ на уклон дороги транспортного средства.
На 430, способ 400 оценивает, требуется или нет торможение транспортного средства посредством привода на ведущие колеса. Способ 400 может делать вывод, что желательно обеспечивать торможение транспортного средства посредством привода на ведущие колеса, когда транспортное средство является спускающимся с возвышенности или во время других условий. Если способ 400 делает вывод, что желательно тормозить транспортное средство с помощью привода на ведущие колеса, способ 400 переходит на 432. Иначе, способ 400 переходит на 434.
На 432, способ 400 регулирует работу DISG и двигателя, чтобы обеспечивать требуемый уровень торможения транспортного средства посредством привода на ведущие колеса, как описано на фиг. 29A-36. В одном из примеров, торможение транспортного средства обеспечивается посредством DISG, когда состояние заряда (SOC) аккумуляторной батареи меньше, чем пороговый уровень. На 420, способ 400 переходит на 434 после того, как обеспечивается торможение транспортного средства с помощью привода на ведущие колеса.
На 434, способ 400 оценивает, следует или нет войти или выйти из дрейфового режима. В одном из примеров, дрейфовый режим может быть описан в качестве того, когда двигатель является работающим на дрейфовой скорости вращения холостого хода (например, осуществляя сгорание воздуха и топлива), в то время как муфта расцепления привода на ведущие колеса разомкнута. Дрейфовая скорость вращения холостого хода ниже, чем скорость вращения холостого хода двигателя, когда двигатель является сжигающим топливно-воздушную смесь, а муфта расцепления привода на ведущие колеса сомкнута. Дополнительно, двигатель может эксплуатироваться в режиме цикла Аткинсона, в то время как в дрейфовом режиме. Кроме того, в некоторых примерах, установка момента зажигания может подвергаться опережению до почти или на минимальной установке момента зажигания для наилучшего крутящего момента двигателя (MBT). В одном из примеров, дрейфовый режим может начинаться, когда крутящий момент DISG находится в пределах заданного диапазона порогового крутящего момента DISG. Способ 400 переходит на 436, если делается вывод, что желательно войти или выйти из дрейфового режима. Иначе, способ 400 переходит на 438.
На 436, способ 400 может приводить в действие двигатель и привод на ведущие колеса в дрейфовом режиме в тех случаях, когда двигатель работает в эффективном рабочем состоянии, и где муфта расцепления привода на ведущие колеса разомкнута, в то время как DISG является выдающим крутящий момент в привод на ведущие колеса транспортного средства, как описано на фиг. 38. В качестве альтернативы, способ 400 может выходить из дрейфового режима, как описано на фиг. 39. Способ 400 переходит на 438 после того, как дрейфовый режим подвергнут входу или выходу.
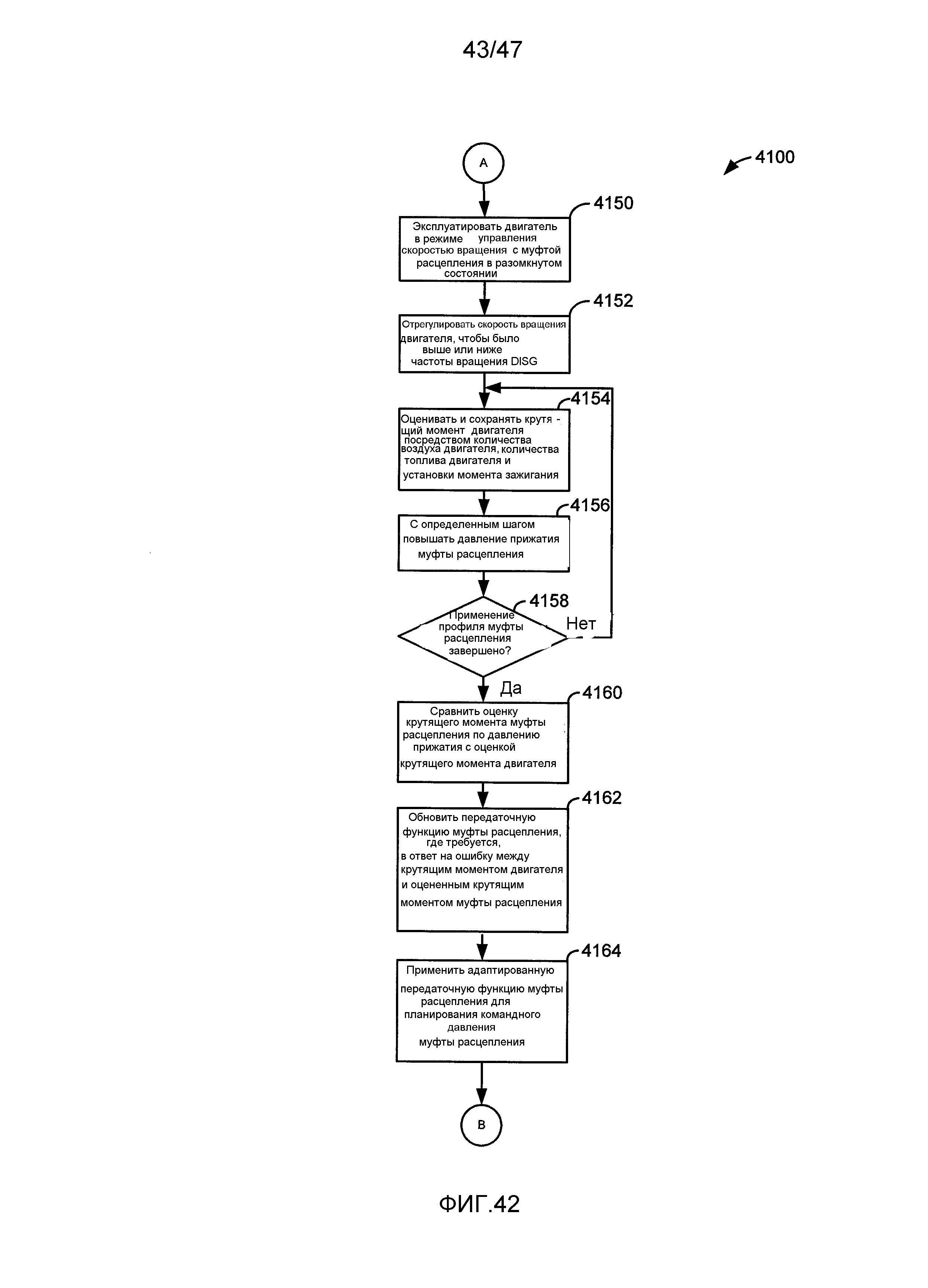
На 438, способ 400 оценивает, следует или нет регулировать передаточную функцию муфты расцепления привода на ведущие колеса. В одном из примеров, способ 400 оценивает, следует или нет адаптировать передаточную функцию муфты расцепления привода на ведущие колеса во время выбранных условий, таких как во время условий холостого хода двигателя или останова двигателя. Если способ 400 делает вывод, что желательно отрегулировать функцию муфты расцепления привода на ведущие колеса, способ 400 переходит на 444. Иначе, способ 400 переходит на 440.
На 444, способ 400 регулирует или адаптирует передаточную функцию муфты расцепления привода на ведущие колеса, как описано на фиг. 42-45. В одном из примеров, передаточная функция муфты расцепления привода на ведущие колеса описывает передачу крутящего момента муфты расцепления привода на ведущие колеса на основании крутящего момента, подводимого к муфте расцепления привода на ведущие колеса, и давления, подаваемого на муфту (например, давления гидравлической жидкости, подаваемого на муфту расцепления привода на ведущие колеса, или рабочего цикла электрического сигнала, подаваемого на муфту расцепления привода на ведущие колеса). Способ 400 переходит на выход после того, как отрегулирована или адаптирована передаточная функция муфты расцепления привода на ведущие колеса.
На 440, способ 400 приводит в действие двигатель и DISG, чтобы обеспечивать требуемый крутящий момент на вход трансмиссии. В одном из примеров, двигатель и DISG приводятся в действие в зависимости от потребления крутящего момента привода на ведущие колеса, выдаваемого водителем и/или контроллером. Например, если запрошено 35 Н∙м крутящего момента привода на ведущие колеса на насосном колесе гидротрансформатора, DISG может обеспечивать 10 Н∙м в привод на ведущие колеса наряду с тем, что двигатель выдает оставшиеся 25 Н∙м в привод на ведущие колеса. В качестве альтернативы, DISG или двигатель могут обеспечивать все 35 Н∙м в привод на ведущие колеса. Условия эксплуатации двигателя и/или DISG также могут учитываться для определения величин крутящего момента, производимого двигателем и DISG. Способ 400 переходит на 442 после того, как выведены режимы работы, скорости вращения и крутящие моменты двигателя и DISG.
На 442, способ 400 регулирует крутящий момент двигателя и DISG, чтобы обеспечивать требуемый крутящий момент насосного колеса гидротрансформатора. В одном из примеров, крутящий момент насосного колеса гидротрансформатора оценивается посредством датчика крутящего момента. В других примерах, рабочее состояние гидротрансформатора является основой для оценки крутящего момента насосного колеса гидротрансформатора. Оценка крутящего момента насосного колеса гидротрансформатора происходит, как описано на фиг. 21. Оцененный крутящий момент насосного колеса трансмиссии вычитается из требуемого крутящего момента насосного колеса трансмиссии, чтобы обеспечивать ошибку крутящего момента насосного колеса гидротрансформатора. Крутящий момент двигателя и/или крутящий момент DISG регулируются в ответ на ошибку крутящего момента насосного колеса гидротрансформатора для снижения ошибки крутящего момента насосного колеса гидротрансформатора до нуля. Способ 400 переходит на выход после того, как отрегулирован крутящий момент привода на ведущие колеса.
Далее, со ссылкой на фиг. 5, показано схематическое представление примерной информации, которая может встречаться во время вождения из одного местоположения в другое местоположение. Источники информации, показанные на фиг. 5, имеются в распоряжении для способов, показанных на фиг. 6-8. Кроме того, источники информации и устройства, показанные на фиг. 6, имеются в распоряжении у систем, показанных на фиг. 1-3.
В этом примере, транспортное средство 290 может ехать по маршруту номер один 501 или маршруту номер два 502 в первый и второй пункты назначения, соответственно. Транспортное средство 290 может включать в себя систему 504 солнечной подзарядки для зарядки устройства 275 накопления энергии, показанного на фиг. 2. Система солнечной подзарядки может включать в себя солнечные батареи и другие связанные устройства. Дополнительно, транспортное средство 290 включает в себя систему 514 индуктивной подзарядки для зарядки устройства 275 накопления энергии, показанного на фиг. 2. Система 514 индуктивной подзарядки может принимать заряд из источника электропитания, внешнего по отношению к транспортному средству, в то время как транспортное средство является движущимся. Транспортное средство 290 также включает в себя приемник 503 для приема сигналов, которые возникают извне или изнутри транспортного средства 290.
Маршрут номер один транспортного средства включает в себя несколько источников информации, объектов и элементов, которые могут быть основой для избирательного приведения в действие определенных компонентов привода на ведущие колеса. Например, транспортное средство 290 может принимать информацию глобальной системы определения местоположения (GPS) со спутника 505 в течение хода поездки. Система GPS может давать информацию, которая предоставляет процессору 12 возможность, как показано на фиг. 1, определять уклоны дороги и расстояния вдоль маршрута номер один. Процессор 12 также может сохранять информацию касательно остановок транспортного средства, которые основаны на знаках или указателях 506 в течение хода поездки, так чтобы, когда транспортное средство 290 проезжает маршрут номер один вновь, информация имелась в распоряжении для определения, когда транспортное средство будет останавливаться, запускаться, разгоняться, замедляться или осуществлять крейсерское движение на по существу постоянной скорости (например, ±5 миль в час).
Транспортное средство 290 также может оценивать величину заряда, выдаваемого солнечной системой 504 с помощью солнца 507 во время проезда по маршруту номер один в устройство 275 накопления энергии. Например, если транспортное средство начинает ехать по маршруту номер один, производя 1 ватт/минуту в 1:00 после полудня, и ожидается, что займет один час, чтобы проехать маршрут номер один, может быть оценено, что 60 ватт будет выработано в течение хода передвижения по маршруту номер один. Кроме того, оцененная мощность, вырабатываемая во время хода поездки, может корректироваться на основании времени суток и прогнозируемой погоды. Например, количество электроэнергии, вырабатываемой в определенное время суток, может экстраполироваться в количество электроэнергии, которое будет выработано позже в тот день, на основании определенных опытным путем таблиц солнечной энергии и времени суток.
Транспортное средство также может регистрировать и сохранять в памяти или принимать дорожные условия 508 из внешних источников, таких как GPS. Дорожные условия 508 могут включать в себя информацию об уклоне дороги, информацию о поверхности дороги и предельные скорости. Транспортное средство 290 также может принимать или измерять температуру окружающей среды с датчика 509 температуры. Датчик 509 температуры может быть включен в транспортное средство 290, или он может быть внешним по отношению к транспортному средству 290.
В заключение, на маршруте номер один, транспортное средство 290 может принимать электропитание в источнике 510 электропитания. Источник 510 электропитания может быть связанным с местом проживания или коммерческим источником электропитания, который подает электропитание на транспортное средство 290 из электросети в пункте назначения один. Транспортное средство 290 может иметь хранимую информацию, в том числе, хранимую базу данных и/или информацию, накопленную из предыдущих поездок в пункт назначения один, которая указывает, что транспортное средство 290 может подзаряжаться в пункте назначения один. Такая информация полезна для определения, каким образом электрический заряд, накопленный на транспортном средстве 290, используется в течение хода поездки.
В еще одном примере, транспортное средство 290 может ехать в пункт назначения два по маршруту номер два. Транспортное средство 290 может быть запрограммировано распознавать, что оно является едущим в пункт назначения два. Вдоль маршрута номер два, транспортное средство 290 может принимать данные погоды, дорожных условий, окружающей температуры и GPS из инфраструктуры 515. Инфраструктура может включать в себя, но не в качестве ограничения, радиовещательные вышки и магистральные/дорожные трансляционные устройства. Транспортное средство 290 также может принимать дорожные условия с карманных устройств 513, таких как телефоны, компьютеры, планшетные устройства и/или персональные органайзеры. В некоторых ситуациях, транспортное средство 290 может принимать дорожные условия и информацию о пункте назначения (например, наличие электрических зарядных станций) с других транспортных средств 511, которые поставляют информацию через передатчик 512.
Таким образом, транспортное средство может принимать информацию в начале поездки и на всем протяжении поездки, которая может быть основой для управления работой привода на ведущие колеса. Например, источники информации, описанные на фиг.5, могут быть основой для приведения в действие муфты 236 расцепления привода на ведущие колеса, DISG 240 и двигателя 10, показанных на фиг. 2.
Далее, со ссылкой на фиг. 6, показана блок-схема последовательности операций способа для приведения в действие гибридной силовой передачи в ответ на информацию, встречаемую во время вождения из одного местоположения в другое местоположение. Способ по фиг. 6 может храниться в постоянной памяти в качестве выполняемых команд в системе по фиг. 1-3.
На 602, способ 600 определяет условия эксплуатации транспортного средства. Условия эксплуатации транспортного средства могут включать в себя, но не в качестве ограничения, скорость вращения двигателя, скорость транспортного средства, температуру окружающей среды, крутящий момент требования водителя (например, крутящий момент, требуемый водителем посредством входного сигнала, также может указываться ссылкой как требуемый крутящий момент привода на ведущие колеса в некоторых примерах) и SOC устройства накопления энергии. Кроме того, условия эксплуатации могут включать в себя выбор маршрута в пункт назначения на основании водительского ввода или посредством приведения текущего маршрута вождения в соответствие маршрутам вождения, принятым во время предыдущих поездок. Способ 600 переходит на 604 после того, как определены условия эксплуатации транспортного средства.
На 604, способ 600 собирает информацию о маршруте вождения. Способ 600 может принимать информацию о маршруте вождения, такую как уклон дороги, местоположения указателей дорожного движения, скорости других транспортных средств, местоположения автомобильных пробок, местоположения электрических зарядных станций, температуру окружающей среды и связанную информацию о дорожном движении из многообразия источников. Источники информации могут включать в себя, но не в качестве ограничения, внутреннюю память контроллера в транспортном средстве, карманные персональные устройства (например, персональные органайзеры, планшеты, компьютеры, телефоны), спутники, инфраструктуру, другие транспортные средства и дорожные устройства связи. В одном из примеров, маршрут вождения транспортного средства может сравниваться с маршрутами вождения, хранимым в памяти контроллера. Если текущий маршрут вождения транспортного средства совпадает с маршрутом вождения, хранимым в памяти контроллера, контроллер выбирает пункт назначения и условия вождения (например, указатели дорожного движения, уклон дороги, зарядное оборудование, и т.д.) из маршрута вождения, хранимого в памяти, без водительского ввода. Способ 600 переходит на 606 после того, как собрана информация о маршруте вождения.
На 606, способ 600 назначает приоритет на использование накопленной электрической энергии на основании благоприятных возможностей для зарядки устройства накопления электрической энергии вдоль выбранного маршрута вождения. Фиг. 7 показывает один из способов назначить приоритет на использование накопленной электрической энергии. Назначение приоритета использования накопленной электрической энергии может включать в себя использование исключительно электрической энергии во время выбранных ускорений транспортного средства, так что использование углеводородного топлива может сокращаться по сравнению с простым базированием использования электрической энергии на основании требуемого потребления крутящего момента. Кроме того, назначение приоритета накопленной электрической энергии может включать в себя использование по существу всего имеющегося в распоряжении заряда (например, снижение заряда устройства накопления энергии вплоть до пороговой величины заряда) в устройстве накопления электрической энергии, когда транспортное средство находится в пределах заданного расстояния от средства внешней зарядки устройства накопления энергии, или во время условий, где устройство накопления энергии может заряжаться посредством кинетической энергии (например, спуска с возвышенности). Способ 600 переходит на 608 после того, как назначен приоритет на использование накопленной электрической энергии. Таким образом, способ 600 планирует использование накопленной электрической энергии до того, как транспортное средство достигает условий маршрута вождения, которые способствуют использованию накопленной электрической энергии.
На 608, способ 600 назначает приоритет на зарядку устройства накопления электрической энергии посредством двигателя на основании маршрута вождения. Например, способ 600 может эксплуатировать двигатель для приведения в движение транспортного средства, когда низок SOC устройства накопления энергии. Кроме того, способ 600 может эксплуатировать двигатель, не заряжая устройство накопления энергии, когда способ 600 определяет, что устройство накопления энергии может быть заряжено через короткое время с использованием кинетической энергии транспортного средства во время замедления транспортного средства. Фиг. 8 показывает один из способов назначить приоритет на зарядку устройства накопления электрической энергии. Способ 600 переходит на 610 после того, как был назначен приоритет на зарядку устройства накопления электрической энергии. Таким образом, способ 600 планирует зарядку устройства накопления электрической энергии до того, как транспортное средство достигает условий маршрута вождения, которые способствуют зарядке устройства накопления электрической энергии.
На 610, способ 600 назначает приоритет на вход в дрейфовый режим привода на ведущие колеса на основании маршрута вождения транспортного средства. В одном из примеров, способ 600 извлекает информацию из 702 способа 700, чтобы определять, когда ожидается, что транспортное средство должно останавливаться на меньшее, чем пороговое время. Кроме того, способ 600 может принимать информацию относительно того, когда ожидается, что транспортное средство должно разгоняться выше пороговой скорости после того, как транспортное средство останавливается на меньшее, чем пороговое время. Способ 600 планирует вход в дрейфовый режим (например, двигатель на холостом ходу, муфта расцепления привода на ведущие колеса разомкнута, и DISG выдает запрошенный крутящий момент в привод на ведущие колеса транспортного средства) на основании местоположений на маршруте вождения, где ожидается, что транспортное средство должно останавливаться на меньшее, чем пороговое время, и где ожидается, что транспортное средство должно ускоряться с остановки транспортного средства с темпом, который больше, чем пороговая интенсивность. Способ 600 переходит на 612 после того, как запланирован вход в дрейфовый режим. Таким образом, способ 600 планирует вход в дрейфовый режим до того, как транспортное средство достигает условий маршрута вождения, которые содействую дрейфовому режиму.
На 612, способ 600 приводит в действие муфту расцепления привода на ведущие колеса, DISG и двигатель на основании запланированного и приоритетного использования электрической энергии, хранимой в устройстве накопления энергии, приоритетной зарядки устройства накопления электрической энергии посредством двигателя и входа в дрейфовый режим. Другими словами, способ 600 может размыкать и смыкать муфту расцепления привода на ведущие колеса, приводить в действие DISG и эксплуатировать двигатель на основании ожидаемых условий транспортного средства и дороги вдоль маршрута вождения. Например, если способ 600 планирует вход в дрейфовый режим при конкретной остановке во время маршрута вождения, способ 600 размыкает муфту расцепления привода на ведущие колеса и входит в дрейфовый режим, когда транспортное средство останавливается в конкретном местоположении. Кроме того, способ 600 размыкает муфту расцепления привода на ведущие колеса, когда DISG запланирован для обеспечения крутящего момента, чтобы разгонять транспортное средство без содействия от двигателя, в ответ на назначение приоритета для использования электрической энергии, накопленной в устройстве накопления электрической энергии. Кроме того еще, способ 600 размыкает муфту расцепления привода на ведущие колеса в ответ на транспортное средство, находящееся в пределах порогового расстояния до достижения электрической зарядной станции, так что энергия из электрического устройства накопления может использоваться для приведения в движение транспортного средства предпочтительнее, чем из двигателя и углеводородов. Дополнительно, способ 600 может размыкать муфту расцепления привода на ведущие колеса в ответ на нахождение в пределах порогового расстояния до достижения уклона вниз по склону. Способ 600 переходит на 614 после того, как работа муфты расцепления привода на ведущие колеса запланирована, и выполняется на основании условий транспортного средства и маршрута вождения.
На 614, способ 600 оценивает, было или нет существенное изменение условий маршрута вождения и/или транспортного средства. Существенное изменение условий маршрута вождения или транспортного средства может быть присутствием неожиданного условия (например, затянувшейся остановкой транспортного средства или неожиданной потерей заряда аккумуляторной батареи) или отсутствием ожидаемого условия (например, отсутствием остановки транспортного средства, когда остановка транспортного средства ожидается). Если способ 600 делает вывод, что было изменение условий маршрута вождения или транспортного средства, ответом является да, и способ 600 возвращается на 602, так что могут вновь определяться назначение приоритета накопленной электрической энергии, зарядка энергетического устройства и вход в дрейфовый режим. Иначе, ответом является нет, и способ 600 переходит на 616.
На 616, способ 600 оценивает, находится или нет транспортное средство в своем конечном пункте назначения для поездки. В одном из примеров, способ 600 сравнивает текущее местоположение транспортного средства с запрограммированным пунктом назначения. В еще одном примере, способ 600 сравнивает текущее местоположение транспортного средства с ожидаемым пунктом назначения. Если способ 600 делает вывод, что транспортное средство находится в своем пункте назначения, способ 600 переходит на выход. Иначе, способ 600 возвращается на 614.
Таким образом, работа гибридной силовой передачи может регулироваться согласно маршруту вождения и условиям вдоль маршрута вождения. Регулирования в отношении гибридной силовой передачи могут включать в себя, но не в качестве ограничения, размыкание и смыкание муфты расцепления привода на ведущие колеса, зарядку устройства накопления энергии посредством двигателя, вход в дрейфовый режим, и вход и выход в или из других рабочих режимов привода на ведущие колеса.
Далее, со ссылкой на фиг. 7, показана блок-схема последовательности операций способа для назначения приоритета использования накопленной электрической энергии в транспортном средстве с гибридным приводом. Способ основывает использование накопленной электрической энергии на благоприятных возможностях заряжать устройство накопления электрической энергии на протяжении маршрута вождения. Способ по фиг. 7 может храниться в постоянной памяти в качестве выполняемых команд в системе по фиг. 1-3.
На 702, способ 700 определяет количество остановок транспортного средства и их местоположения на маршруте вождения, и оценивает рекуперативную энергию, подаваемую в устройство накопления электрической энергии во время остановок транспортного средства и во время других благоприятных возможностей (например, замедлений транспортного средства и во время спусков с возвышенности). Способ 700 также может оценивать ожидаемую величину зарядки аккумуляторной батареи посредством системы солнечной подзарядки. Кроме того, способ 700 определяет число ускорений транспортного средства с остановки и оценку электрической энергии для разгона с каждой остановки транспортного средства. Дополнительно, способ 700 может сохранять информацию об остановках транспортного средства, которые являются меньшими, чем пороговая временная длительность.
В одном из примеров, количество остановок транспортного средства и их местоположения оцениваются на основании количества указателей и/или знаков дорожного движения вдоль маршрута движения, которые определяются из источников информации, описанных на фиг. 5. В частности, в одном из примеров, количество остановок транспортного средства определяется по количеству указателей и/или знаков дорожного движения вдоль маршрута движения, умноженному на значение, представляющее обоснованное процентное соотношение (например, 60%) указателей дорожного движения, на которых транспортное средство будет фактически останавливаться. Число ускорений с остановки равно оцененному количеству остановок транспортного средства. Количество энергии, рекуперированной во время каждой остановки транспортного средства, может рассчитываться на основании скорости транспортного средства перед остановкой, уклона дороги и массы транспортного средства (например, E=1/2 mv2, где E - энергия, m - масса транспортного средства, а v - скорость транспортного средства, или, в качестве альтернативы на временном интервале, где m - масса транспортного средства, a - ускорение транспортного средство, g - ускорение, обусловленное силой тяжести, а ⊖ - угол дороги, который может быть преобразован в уклон). Подобным образом, количество энергии для ускорения транспортного средства может рассчитываться на основании предельной скорости, уклона дороги и массы транспортного средства (например, с использованием на временном интервале или E=1/2mv2), а затем, преобразовываться в электрический заряд. Кроме того, энергия, полученная от солнечного или индуктивного устройств вдоль маршрута, может добавляться к общей величине заряда, имеющегося в распоряжении во время езды по маршруту. Количество указателей дорожного движения, их местоположение и информация об уклоне дороги могут определяться с помощью источников информации, показанных на фиг. 5. Способ 700 переходит на 704 после того, как определено количество остановок транспортного средства, ускорений транспортного средства, рекуперированной энергии, энергии, используемой для ускорения транспортного средства в каждом местоположении остановки транспортного средства.
На 704, способ 700 оценивает, может или нет устройство накопления энергии обеспечивать энергию для разгона транспортного средства до предельной скорости после каждой остановки транспортного средства, определенной на 702. В одном из примеров, энергия, накопленная в устройстве накопления энергии, плюс количество рекуперированной энергии, оцененной имеющейся в распоряжении вдоль маршрута вождения, складываются друг с другом. Потери в приводе на ведущие колеса вычитаются из суммы накопленной энергии и рекуперативной энергии, и результат сравнивается с количеством энергии, оцененным для ускорения транспортного средства со всех остановок транспортного средства. Если количество энергии для разгона транспортного средства со всех остановок транспортного средства больше, чем сумма накопленной энергии и рекуперативной энергии, может определяться, что содействие двигателя может быть необходимым вдоль маршрута вождения, и что устройство накопления энергии может не иметь достаточного количества накопленной энергии для завершения поездки по маршруту. Если устройство накопления энергии может не иметь достаточной мощности для разгона транспортного средства со всех остановок вдоль выбранного маршрута, ответом является нет, и способ 700 переходит на 706. Иначе, ответом является да, и способ 700 переходит на 708.
На 706, способ 700 выбирает, какие ускорения с остановки могут выполняться с использованием энергии из устройства накопления энергии. Другими словами, способ 700 принимает решение, во время каких ускорений транспортного средства DISG будет обеспечивать крутящий момент в привод на ведущие колеса. В одном из примеров, выбор ускорений транспортного средства, где приводится в действие DISG, основан на том, какие ускорения с остановки, когда объединены, требуют количества энергии, которое наиболее близко соответствует количеству энергии, имеющемуся в распоряжении из устройства накопления энергии. Например, если в начале поездки устройство накопления энергии является хранящим X кулонов заряда, и ожидается, что первые двадцать три ускорения транспортного средства должны использовать X кулонов энергии, первые двадцать три ускорения транспортного средства будут обеспечиваться посредством DISG и устройства накопления энергии. Однако, должно быть отмечено, что выбранные ускорения транспортного средства не должны быть следующими друг за другом по порядку. Скорее, отдельные ускорения транспортного средства, механизированные посредством DISG и устройства накопления энергии, могут выбираться из любого ускорения во время запланированного маршрута транспортного средства.
В еще одном примере, ускорения с остановки транспортного средства, где DISG приводится в действие с помощью заряда из устройства накопления энергии, основаны на том, когда энергия от рекуперации имеется в распоряжении для зарядки устройства накопления энергии, и ожидаемом количестве энергии, накопленном во время останова транспортного средства. Например, если всего лишь небольшое количество рекуперативной энергии ожидается во время замедления, и ожидается, что заряд устройства накопления энергии должен быть меньшим, чем пороговый уровень, на остановке транспортного средства, DISG не планируется для разгона транспортного средства с такой конкретной остановки транспортного средства. Способ 700 переходит на 716 после того, как определены ускорения с остановки транспортного средства, где DISG приводится в действие зарядом из устройства накопления энергии.
На 708, способ 700 определяет количество и местоположения ускорений движущегося транспортного средства не с остановки транспортного средства. Способ 700 также оценивает количество энергии для разгона транспортного средства во время каждого ускорения движущегося транспортного средства. Местоположения и число ускорений движущегося транспортного средства могут определяться по тому, где происходят изменения предельной скорости по ходу маршрута вождения. Таким образом, число ускорений движущегося транспортного средства может определяться по каждому увеличению вывешенной на маршруте движения предельной скорости. Изменение скорости маршрута транспортного средства может храниться в базе данных карт и извлекаться из памяти. Кроме того, маршрут транспортного средства может определяться на основании кратчайшего расстояния или времени между текущим местоположением и запрошенным пунктом назначения транспортного средства.
Способ 700 также определяет энергию для разгона транспортного средства в каждом из местоположений ускорения транспортного средства. Количество энергии для ускорения транспортного средства может рассчитываться на основании предельной скорости, уклона дороги и массы транспортного средства (например, с использованием на временном интервале или E=1/2mv2). Способ 700 переходит на 710 после того, как определено количество движущихся ускорений, местоположений ускорений движущегося транспортного средства и энергии, оцененной для разгона транспортного средства в каждом местоположении ускорения движущегося транспортного средства.
На 710, способ 700 оценивает, может или нет устройство накопления энергии обеспечивать энергию для разгона транспортного средства до предельной скорости после того, как каждое ускорение движущегося транспортного средства определено на 708. В одном из примеров, любой остаток количества энергии, накопленной в устройстве накопления энергии, плюс количество рекуперативной энергии, оцененной имеющейся в распоряжении вдоль маршрута водителя, минус энергия для разгона транспортного средства при каждой остановке, определенной из 702, сравнивается с количеством энергии для разгона транспортного средства во всех местоположениях ускорения движущегося транспортного средства. Если количество энергии для разгона движущегося транспортного средства в каждом местоположении больше, чем остаток из 702, может определяться, что содействие двигателя может быть необходимым вдоль маршрута вождения, и что устройство накопления энергии может не иметь достаточного количества энергии, накопленной для обеспечения электрической мощности на протяжении маршрута. Если устройство накопления энергии не имеет достаточной мощности для разгона транспортного средства по всем ускорениям движущегося транспортного средства вдоль выбранного маршрута, ответом является нет, и способ 700 переходит на 714. Иначе, ответом является да, и способ 700 переходит на 712.
На 712, способ 700 выбирает, где, в течение маршрута вождения, может потребляться оставшаяся энергия, накопленная в устройстве накопления энергии и вырабатываемая во время рекуперации (например, во время замедления транспортного средства). Например, если устройство накопления энергии имеет X кулонов заряда, оставшегося сверх пороговой величины заряда, и источник зарядки имеется в распоряжении в пункте назначения транспортного средства, способ 700 определяет, в каком местоположении вдоль маршрута вождения, потребляется оставшийся заряд. В одном из примеров, потребление оставшегося заряда, накопленного в устройстве накопления энергии и не использованного для разгона транспортного средства, потребляется, начиная с местоположения, которое основано на пункте назначения. Например, если ожидается, что транспортное средство будет иметь Z кулонов избыточного заряда, и транспортное средство использует 1/Z кулонов за милю, муфта расцепления привода на ведущие колеса размыкается, и DISG начинает разряд Z кулонов в Z милях от пункта назначения, и двигатель останавливается. Таким образом, способ 700 снижает энергию, накопленную в устройстве накопления энергии некоторым образом, который может уменьшать расход углеводородного топлива, поскольку потребляемая накопленная электрическая энергия увеличивается посредством потребления хранящего энергию заряда вплоть до порогового уровня заряда (например, минимального уровня заряда аккумуляторной батареи). Кроме того, поскольку транспортное средство может подзаряжаться посредством электросети в пункте назначения, устройство накопления энергии может заряжаться энергией из более эффективного источника, чем двигатель.
С другой стороны, если способ 700 определяет, что источника зарядки в пункте назначения нет, муфта расцепления привода на ведущие колеса смыкается, и энергия может оставаться сохраненной в устройстве накопления электрической энергии. Способ 700 переходит на 716 после того, как определено, где будет потребляться избыточный заряд, не потребленный во время ускорения транспортного средства.
На 714, способ 700 выбирает, какие ускорения движущегося транспортного средства будут выполняться с помощью энергии из устройства накопления энергии. Другими словами, способ 700 принимает решение, во время каких ускорений движущегося транспортного средства (например, ускорений транспортного средства не с остановки) DISG будет обеспечивать крутящий момент в привод на ведущие колеса. В одном из примеров, выбор ускорений движущегося транспортного средства, где приводится в действие DISG, основан на том, какие ускорения движущегося транспортного средства, когда объединены, требуют количества энергии, которое наиболее близко соответствует количеству энергии, оставшемуся после того, как ускорения транспортного средства с остановки транспортного средства обеспечены энергией для разгона транспортного средства. Например, если в начале поездки устройство накопления энергии является хранящим X кулонов заряда, и есть двадцать три ускорения транспортного средства, которые ожидается, что должны использовать Y кулонов энергии (например, где Y меньше, чем X), первые двадцать три ускорения транспортного средства будут обеспечиваться посредством DISG и устройства накопления энергии. Если ожидается, что Z кулонов должны остаться после ускорения транспортного средства при каждой остановке, и сумма энергопотребления энергии ускорения движущегося транспортного средства является большей, чем Z кулонов, первые ускорения движущегося транспортного средства, отнимающие вплоть до Z кулонов заряда, снабжаются Z кулонами заряда. Однако, должно быть отмечено, что выбранные ускорения движущегося транспортного средства, где выдается избыточный заряд, не должны быть следующими друг за другом по порядку. Способ 700 переходит на 716 после того, как выбраны ускорения движущегося транспортного средства, принимающие содействие DISG и заряд из устройства накопления энергии.
На 716, способ 700 планирует содействие DISG приводу на ведущие колеса для разгона или для сохранения транспортного средства движущимся на основании определенных местоположений использования энергии для ускорений и установившегося состояния. Содействие DISG может быть предусмотрено, когда муфта расцепления привода на ведущие колеса находится в разомкнутом состоянии, или во время сомкнутого состояния. Кроме того, DISG может обеспечивать весь или только часть крутящего момента для приведения в движение транспортного средства.
Таким образом, можно планировать и назначить приоритет на использование накопленной электрической энергии. В этом примере, ускорения транспортного средства с нулевой скорости имеют более высокий приоритет, чем ускорения движущегося транспортного средства, или у использования накопленной электрической энергии во время условий крейсерского движения. Такая работа может предоставлять двигателю возможность работать в более эффективных условиях эксплуатации, таких как установившиеся условия скорости вращения и нагрузки.
Далее, со ссылкой на фиг. 8, показана блок-схема последовательности операций способа для планирования и назначения приоритета зарядки устройства накопления электрической энергии посредством двигателя на основании маршрута вождения. Способ по фиг. 8 может храниться в постоянной памяти в качестве выполняемых команд в системе по фиг. 1-3.
На 802, способ 800 извлекает информацию из 702 и 708 по фиг. 7, чтобы определять, когда ожидается, что устройству накопления электрической энергии потребуется зарядка. В частности, если определено, на 702 по фиг. 7, что транспортное средство может не разгоняться из всех условий нулевой скорости, способ 800 может определять, что устройству накопления электрической энергии необходимо подзаряжаться в местоположении ускорения транспортного средства вдоль маршрута вождения, где SOC снижается до меньшего, чем пороговый уровень. Подобным образом, способ 800 может оценивать, где вдоль маршрута вождения SOC уменьшается до меньшего, чем пороговый уровень, в течение движущегося ускорения или во время условий крейсерского движения. Способ 800 переходит на 804 после определения, когда ожидается, что устройству накопления электрической энергии будет необходима подзарядка.
На 804, способ 800 оценивает, имеет или нет устройство накопления электрической энергии достаточный заряд для приведения в движение транспортного средства на протяжении всей поездки. В одном из примеров, SOC сравнивается с оценкой энергии для эксплуатации транспортного средства на протяжении всей поездки на основании на временном интервале, или E=1/2mv2. Если способ 800 делает вывод, что устройство накопления электрической энергии имеет достаточное количество накопленной энергии для приведения в действие DISG на протяжении всего маршрута вождения, ответом является да, и способ 800 переходит на выход. Иначе, ответом является нет, и способ 800 переходит на 806.
На 806, способ 800 определяет участки и местоположения маршрута вождения, где зарядка устройства накопления энергии посредством двигателя будет наиболее эффективной, и где SOC ожидается низким. Может ожидаться, что SOC будет низким в местоположениях, определенных на 702, 708, и 714 по фиг. 7. Местоположения и участки маршрута вождения, где зарядка устройства накопления энергии может быть наиболее эффективной, могут быть основаны на определенных опытным путем скоростях вращения и нагрузках двигателя, где двигатель расходует меньшее количество топлива на каждую пройденную милю. Например, если определено, что двигатель работает, потребляя минимальное количество топлива на каждую пройденную милю на 2200 оборотах в минуту между нагрузкой двигателя 0,2 и 0,3, может определяться, что устройство накопления энергии должно подзаряжаться посредством двигателя на скорости транспортного средства, где двигатель находится на 2200 оборотах в минуту и между нагрузкой 0,2 и 0,3, когда DISG является заряжающим устройство накопления энергии. Таким образом, в одном из примеров, способ 800 выбирает местоположения и участки маршрута вождения для зарядки устройства накопления энергии на основании местоположений дорог, имеющих постоянные скорости транспортных средств (например, предельную скорость 55 миль в час) в течение протяженных длительностей (например, 10 миль), которые соответствуют эффективным условиям эксплуатации двигателя. В некоторых примерах, выбираются скорости транспортного средства, где ожидается, что коэффициент полезного действия двигателя должен быть большим, чем пороговый коэффициент полезного действия. Коэффициент полезного действия двигателя на конкретной скорости транспортного средства может определяться опытным путем и сохраняться в памяти. Способ 800 переходит на 808 после того, как определены участки маршрута вождения, где зарядка устройства накопления энергии посредством двигателя является наиболее эффективной.
На 808, способ 800 определяет местоположения и участки маршрута вождения, где заряд, подаваемый двигателем в устройство накопления энергии, может использоваться полностью. Например, способ 800 оценивает количество энергии, которое может использоваться для приведения в движение транспортного средства из его текущего местоположения, где зарядка устройства накопления энергии посредством двигателя является обоснованной, в конечный пункт назначения. Устройство накопления энергии может подзаряжаться в любом местоположении вдоль маршрута вождения, где коэффициент полезного действия двигателя больше, чем пороговый коэффициент полезного действия, и где количество энергии для приведения в движение транспортного средства из его текущего местоположения в его пункт назначения, больше, чем пороговая величина заряда (например, зарядная емкость устройства накопления энергии). Способ 800 переходит на 810 после участков маршрута вождения, где заряд, подаваемый двигателем в устройство накопления энергии, может полностью использоваться.
На 810, способ 800 выбирает местоположения и участки маршрута вождения, где двигатель может подавать заряд в устройство накопления энергии наиболее эффективно, и где заряд, подаваемый двигателем в устройство накопления энергии, может полностью использоваться в течение маршрута вождения. Например, если определено, что устройство накопления энергии хранит достаточное количество энергии для приведения в движение транспортного средства в течение 10 миль, а транспортное средство находится в 20 милях от пункта назначения и является работающим с коэффициентом полезного действия, большим, чем пороговый коэффициент полезного действия, местоположение за 20 миль от пункта назначения может выбираться в качестве местоположения для зарядки устройства накопления энергии посредством двигателя. Муфта расцепления привода на ведущие колеса сомкнута, когда двигатель является заряжающим устройство накопления электрической энергии посредством двигателя. Способ 800 переходит на выход после того, как выбраны местоположения для зарядки устройства накопления электрической энергии посредством двигателя.
Таким образом, зарядка устройства накопления энергии посредством двигателя может назначить приоритет на основании того, где двигатель может эффективно работать во время зарядки, и на основании местоположения транспортного средства, находящегося на расстоянии от пункта назначения, которое предусматривает использование любого заряда, который может подаваться в устройство накопления энергии посредством двигателя. Кроме того, назначение приоритета может быть основой для определения местоположений изменений режима привода на ведущие колеса.
Таким образом, способы и системы по фиг. 1-8 предусматривают эксплуатацию транспортного средства с гибридным приводом, содержащую: приведение в действие муфты расцепления привода на ведущие колеса в ответ на пункт назначения транспортного средства. Таким образом, может улучшаться работа привода на ведущие колеса. Способ включает в себя те случаи, когда приведение в действие муфты расцепления привода на ведущие колеса включает в себя размыкание муфты расцепления привода на ведущие колеса в ответ на информацию, что зарядное устройство имеется в распоряжении в пункте назначения транспортного средства. Способ дополнительно содержит останов двигателя и уменьшение величины заряда, накопленного в устройстве накопления энергии, в ответ на оценку энергии, которую привод на ведущие колеса транспортного средства с гибридным приводом будет использовать для достижения пункта назначения транспортного средства. Способ включает в себя те случаи, когда величина заряда уменьшается посредством приведения в действие встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда приведение в действие муфты расцепления привода на ведущие колеса включает в себя смыкание муфты расцепления привода на ведущие колеса в ответ на информацию, указывающую, что зарядное устройство не имеется в распоряжении в пункте назначения. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса и зарядку устройства накопления энергии в ответ на местоположение пункта назначения транспортного средства.
Способы и системы по фиг. 1-8 также предусматривают эксплуатацию транспортного средства с гибридным приводом, содержащую: прием информации о маршруте вождения в контроллере; и избирательное приведение в действие муфты расцепления привода на ведущие колеса в ответ на информацию о маршруте вождения. Способ включает в себя те случаи, когда информация о маршруте вождения включает в себя, имеется или нет в распоряжении зарядная станция в пункте назначения, и где избирательное приведение в действие муфты расцепления привода на ведущие колеса включает в себя размыкание муфты расцепления привода на ведущие колеса в ответ на количество энергии, которое ожидается, что должно потребляться транспортное средство с гибридным приводом для достижения пункта назначения.
В некоторых примерах, способ включает в себя те случаи, когда информация о маршруте вождения включает в себя указание уклона вниз по склону, и где муфта расцепления привода на ведущие колеса удерживается разомкнутой в ответ на указание уклона вверх по склону. Способ включает в себя те случаи, когда информация о маршруте вождения сохраняется в контроллере из предыдущей поездки по маршруту вождения. Способ дополнительно содержит оценку информации о маршруте вождения на основании текущего маршрута транспортного средства и размыкание или смыкание муфты расцепления привода на ведущие колеса в ответ на наличие в распоряжении зарядного оборудования в пункте назначения. Способ также включает в себя те случаи, когда избирательное приведение в действие муфты расцепления привода на ведущие колеса включает в себя размыкание и смыкание муфты привода на ведущие колеса в ответ на количество ожидаемых остановок транспортного средства в течение маршрутов вождения.
В одном из примеров, способ включает в себя те случаи, когда избирательное приведение в действие муфты расцепления привода на ведущие колеса включает в себя размыкание и смыкание муфты привода на ведущие колеса в ответ на число ускорений движущегося транспортного средства, не включая ускорения транспортного средства от остановки транспортного средства. Способ включает в себя те случаи, когда избирательное приведение в действие муфты расцепления привода на ведущие колеса включает в себя размыкание и смыкание муфты привода на ведущие колеса в ответ на количество число ускорений транспортного средства от остановки транспортного средства. Кроме того, способ включает в себя те случаи, когда информация о маршруте вождения включает в себя информацию об уклоне дороги, и дополнительно содержит накопление заряда в устройстве накопления электрической энергии в ответ на информацию о маршруте вождения.
Способы и системы по фиг. 1-8 дополнительно предусматривают эксплуатацию транспортного средства с гибридным приводом, содержащую: оценку состояния заряда (SOC) устройства накопления электрической энергии; прием информации о маршруте вождения в контроллере; и планирование зарядки устройства накопления электрической энергии в первом местоположении в ответ на SOC и информацию о маршруте вождения до достижения первого местоположения. Способ также включает в себя те случаи, когда транспортное средство с гибридным приводом принимает информацию о маршруте вождения с другого транспортного средства, иного чем транспортное средство с гибридным приводом. Способ дополнительно содержит приведение в действие муфту расцепления привода на ведущие колеса в ответ на информацию о маршруте вождения. Способ дополнительно содержит обновление планирования зарядки устройства накопления электрической энергии в ответ на изменение условий вождения. Способ также дополнительно содержит планирование зарядки устройства накопления электрической энергии во втором местоположении раньше достижения второго местоположения.
Далее, со ссылкой на фиг. 9, показана блок-схема последовательности операций способа для примерной последовательности для приведения в действие силовой передачи транспортного средства с гибридным приводом в ответ на изменение массы транспортного средства. Способ по фиг. 8 может храниться в качестве выполняемых команд в постоянной памяти в системе по фиг. 1-3. Кроме того, способ по фиг. 9 может предусматривать последовательность, проиллюстрированную на фиг. 10.
На 902, способ 900 определяет условия эксплуатации транспортного средства. Условия эксплуатации транспортного средства могут включать в себя, но не в качестве ограничения, скорость вращения двигателя, скорость транспортного средства, SOC устройства накопления энергии, нагрузку двигателя, запрос крутящего момента двигателя и ускорение транспортное средство. Условия эксплуатации могут определяться или логически выводиться по датчикам, описанным на фиг. 1-3. Способ 900 переходит на 904 после того, как определены условия эксплуатации транспортного средства.
На 904, способ 900 определяет массу транспортного средства. В одном из примеров, масса транспортного средства основана на следующих уравнениях:
Где ускорение транспортного средства является нулевым,
Крутящий момент двигателя/привода на ведущие колеса ≈ дорожная нагрузка + основанный на уклоне крутящий момент
С использованием: T_wh1=R_rr ∙ M_v ∙ g ∙ sin(⊖1)+T_rl1
Где:
T_wh1 = Крутящий момент колес при угле уклона = ⊖1
T_wh2 = Крутящий момент колес при угле уклона = ⊖2
R_rr = радиус качения ведомых колес
M_v = оценка массы транспортного средства
g = постоянная силы тяжести
⊖1 = угол уклона
T_rl1 = Крутящий момент дорожной нагрузки и ведомого колеса при уклоне 1
T_rl2 = Крутящий момент дорожной нагрузки и ведомого колеса при уклоне 2
В таком случае, оценка массы транспортного средства имеет значение:
M_v=[(T_wh1-T_wh2)+(T_rl2-T_rl1)]/[R_rr * g * (⊖1-⊖2)]
В некоторых примерах, масса транспортного средства включает в себя массу транспортного средства и прицепа, буксируемого транспортным средством. В других примерах, масса транспортного средства является массой только транспортного средства без прицепа. Кроме того, в некоторых примерах, масса транспортного средства может включать в себя массу пассажиров в транспортном средстве и груз транспортного средства. Крутящий момент двигателя/привода на ведущие колеса может оцениваться по определенным опытным путем таблицам или функциям крутящего момента, которые индексируются с использованием скорости вращения и нагрузки двигателя. Например, крутящий момент двигателя может оцениваться посредством индексирования таблицы выходного крутящего момента двигателя, который индексируется скоростью вращения и нагрузкой двигателя. Способ 900 переходит на 906 после того, как оценена масса транспортного средства.
На 906, способ 900 регулирует пороговое значение SOC устройства накопления энергии, где предоставлена возможность автоматического останова двигателя. В одном из примеров, пороговое значение SOC устройства накопления энергии повышается, когда масса транспортного средства увеличена, так что двигатель транспортного средства будет останавливаться во время условий замедления транспортного средства, когда устройство накопления энергии имеет значение, большее, чем первый пороговый уровень. Если масса транспортного средства уменьшена, пороговое значение SOC устройства накопления энергии уменьшается, так что двигатель транспортного средства будет останавливаться во время условий замедления транспортного средства, когда устройство накопления энергии имеет значение, большее чем второй пороговый уровень, второй пороговый уровень меньше, чем первый пороговый уровень. Пороговое значение SOC устройства накопления энергии может регулироваться пропорционально изменению массы транспортного средства или в качестве функции массы транспортного средства. Фиг. 10 показывает два пороговых уровня SOC, которые основаны на разных массах транспортного средства. Способ 900 переходит на 908 после того, как отрегулировано пороговое значение SOC устройства накопления энергии для останова двигателя.
На 908, способ 900 оценивает, присутствуют или нет условия для автоматического останова двигателя. В некоторых примерах, условия для автоматического останова двигателя включают в себя условия, указывающие замедление транспортного средства, нажатие тормозной педали, отсутствие нажатия педали акселератора, SOC устройства накопления энергии, большее, чем пороговый уровень. Если способ 900 делает вывод, что условия для автоматического останова двигателя удовлетворены, ответом является да, и способ 900 переходит на 910. Иначе, ответом является нет, и способ 900 переходит на 912.
На 910, способ 900 автоматически останавливает двигатель. Двигатель может останавливаться автоматически посредством прекращения топлива и/или искры в двигатель без водительского запроса останова двигателя через устройство, которое обладает единственной функцией останова и/или запуска двигателя. Способ 900 переходит на 912 после того, как двигатель остановлен.
На 912, способ 900 оценивает, был или нет двигатель остановлен автоматически. В одном из примеров, бит устанавливается в памяти контроллера, когда автоматически останавливается двигатель. Если способ 900 делает вывод, что двигатель был остановлен автоматически, ответом является да, и способ 900 переходит на 914. Иначе, ответом является нет, и способ 900 осуществляет выход.
На 914, способ 900 оценивает, является или нет масса транспортного средства меньшей, чем пороговая масса. В одном из примеров, пороговая масса является массой транспортного средства ненагруженного транспортного средства плюс масса приспособлений для одного или более лиц и предписанного объема багажа. Если способ 900 делает вывод, что масса транспортного средства меньше, чем пороговая масса, ответом является да, и способ 900 переходит на 916. Иначе, ответом является нет, и способ 900 переходит на 922.
На 916, способ 900 оценивает, является или нет сила применения фрикционных тормозов меньшей, чем пороговое значение. В качестве альтернативы, способ 900 оценивает, нажата или нет тормозная педаль, на 916. Если сила прижатия фрикционных тормозов меньше, чем пороговое значение, или если тормозная педаль не нажата, ответом является да, и способ 900 переходит на 918. Иначе, ответом является нет, и способ 900 переходит на выход.
На 918, способ 900 оставляет двигатель в остановленном состоянии и выдает пороговую величину крутящего момента медленного движения (например, крутящий момент, который перемещает транспортное средство на заданной медленной величине скорости (2 мили/час) на плоском уклоне) на колеса транспортного средства посредством DISG. Способ 900 переходит на 920 после того, как крутящий момент медленного движения выведен через DISG.
На 920, способ 900 выдает базовую величину крутящего момента насосного колеса гидротрансформатора в ответ на крутящий момент требования водителя. Базовая величина крутящего момента насосного колеса гидротрансформатора не учитывает никакие изменения массы транспортного средства. Кроме того, в одном из примеров, базовая величина крутящего момента насосного колеса гидротрансформатора основана на водительском вводе в отношении педали акселератора (например, крутящем моменте требования водителя), и величина отклонения педали акселератора преобразуется в крутящий момент насосного колеса гидротрансформатора. В других примерах, крутящий момент колес, тормозной момент двигателя и/или другие связанные с приводом на ведущие колеса крутящие моменты могут занимать место крутящего момента насосного колеса гидротрансформатора. Крутящий момент насосного колеса гидротрансформатора преобразуется в требуемый ток DISG, и ток подается в DISG, чтобы обеспечивать крутящий момент насосного колеса гидротрансформатора.
На 922, способ 900 оценивает, является или нет сила применения фрикционных тормозов меньшей, чем пороговое значение. В качестве альтернативы, способ 900 оценивает, нажата или нет тормозная педаль, на 922. Если сила прижатия фрикционных тормозов меньше, чем пороговое значение, или если тормозная педаль не нажата, ответом является да, и способ 900 переходит на 924. Иначе, ответом является нет, и способ 900 переходит на выход.
На 924, двигатель перезапускается, муфта расцепления привода на ведущие колеса смыкается, и по меньшей мере часть крутящего момента медленного движения транспортного средства выдается двигателем. В некоторых примерах, крутящий момент медленного движения транспортного средства может обеспечиваться посредством двигателя и DISG. В других примерах, крутящий момент медленного движения транспортного средства выдается исключительно посредством двигателя. Способ 900 переходит на 926 после того, как двигатель запущен, и по меньшей мере часть крутящего момента медленного движения транспортного средства выдается двигателем.
На 926, способ 900 выдает отрегулированную по массе транспортного средства величину крутящего момента насосного колеса гидротрансформатора в ответ на крутящий момент требования водителя. Например, способ 900 выдает базовую величину крутящего момента насосного колеса гидротрансформатора плюс дополнительную величину крутящего момента, которая основана на увеличении массы транспортного средства. В одном из примеров, дополнительная величина крутящего момента определяется опытным путем и сохраняется в таблице или функции в памяти контроллера, которая индексируется массой транспортного средства, которая превышает базовую массу транспортного средства. Крутящий момент насосного колеса гидротрансформатора может обеспечиваться исключительно посредством двигателя или посредством двигателя и DISG. В одном из примеров, требуемый крутящий момент насосного колеса гидротрансформатора выдается посредством открывания дросселя двигателя и подачи топлива в двигатель в ответ на требуемый крутящий момент насосного колеса гидротрансформатора. В еще одном примере, требуемый крутящий момент насосного колеса гидротрансформатора выдается посредством питания DISG величиной тока, а двигателя топливом и величиной открывания дросселя. Способ 900 переходит на выход после того, как выдан требуемый крутящий момент насосного колеса гидротрансформатора.
Таким образом, работа расцепления двигателя и привода на ведущие колеса может регулироваться в ответ на изменение массы транспортного средства. Кроме того, условия для останова двигателя на основании SOC также могут регулироваться на основании массы транспортного средства.
Далее, со ссылкой на фиг. 10, показана примерная последовательность для приведения в действие силовой передачи транспортного средства с гибридным приводом в ответ на изменение массы транспортного средства. Последовательность по фиг. 10 может выполняться посредством способа, показанного на фиг. 10, выполняемого в системе, описанной на фиг. 1-3.
Первый график сверху по фиг. 10 является графиком скорости транспортного средства в зависимости от времени. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает в направлении стрелки оси X.
Второй график сверху по фиг. 10 является графиком рабочего состояния двигателя в зависимости от времени. Ось Y представляет рабочее состояние двигателя. Двигатель включен и работает, сжигая топливно-воздушную смесь, когда кривая находится на верхнем уровне. Двигатель отключен и не осуществляет сгорание, когда кривая находится на нижнем уровне. Ось X представляет время, и время возрастает в направлении стрелки оси X.
Третий график сверху по фиг. 10 является графиком состояния применения тормозов транспортного средства в зависимости от времени. Ось Y представляет состояние тормозов транспортного средства. Тормозная педаль транспортного средства нажата, когда кривая находится на верхнем уровне. Тормозная педаль транспортного средства не нажата, когда кривая находится на нижнем уровне. Ось X представляет время, и время возрастает в направлении стрелки оси X.
Четвертый график сверху по фиг. 10 является графиком требуемого крутящего момента насосного колеса гидротрансформатора в зависимости от времени. Ось Y представляет требуемый крутящий момент насосного колеса гидротрансформатора, и требуемый крутящий момент насосного колеса гидротрансформатора возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает в направлении стрелки оси X.
Пятый график сверху по фиг. 10 является графиком состояния заряда (SOC) устройства накопления энергии в зависимости от времени. Ось Y представляет SOC устройства накопления энергии, и SOC устройства накопления энергии возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает в направлении стрелки оси X. Горизонтальная метка 1002 представляет минимальный уровень SOC устройства накопления энергии, где двигатель может быть остановлен, а муфта расцепления привода на ведущие колеса разомкнута, когда масса транспортного средства возрастает, например, через увеличение полезной нагрузки транспортного средства. Горизонтальная метка 1004 представляет минимальный уровень SOC устройства накопления энергии, где двигатель может быть остановлен, а муфта расцепления привода на ведущие колеса разомкнута, когда масса транспортного средства является массой базового ненагруженного транспортного средства. Таким образом, двигатель может останавливаться, а муфта расцепления привода на ведущие колеса размыкаться на более низких уровнях SOC, когда транспортное средство находится на своей базовой массе. С другой стороны, когда масса транспортного средства возрастает, двигатель может останавливаться, а муфта расцепления привода на ведущие колеса размыкаться при более высоком уровне SOC, так что двигатель продолжает работать, если устройство накопления энергии не находится на SOC верхнего уровня.
Шестой график сверху по фиг. 10 является графиком массы транспортного средства в зависимости от времени. Ось Y представляет массу транспортного средства, и масса транспортного средства увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает в направлении стрелки оси X.
Седьмой график сверху по фиг. 10 является графиком состояния муфты расцепления привода на ведущие колеса в зависимости от времени. Муфта расцепления привода на ведущие колеса находится в разомкнутом состоянии, когда кривая находится на нижнем уровне. Муфта расцепления привода на ведущие колеса находится в сомкнутом состоянии, когда кривая находится на верхнем уровне. Ось X представляет время, и время возрастает в направлении стрелки оси X.
В момент T0 времени, скорость транспортного средства является нулевой, двигатель остановлен, тормозная педаль нажата, SOC устройства накопления энергии является относительно высоким, муфта расцепления привода на ведущие колеса разомкнута, а масса транспортного средства находится на нижнем уровне. В этом примере двигатель был остановлен автоматически в ответ на скорость транспортного средства, являющуюся нулевой и нажимаемую тормозную педаль.
В момент T1 времени, водитель отпускает тормозную педаль, и скорость транспортного средства постепенно возрастает по мере того, как DISG (не показан) прикладывает крутящий момент к приводу на ведущие колеса транспортного средства в ответ на отпускание водителем тормозной педали. Двигатель остается в отключенном состоянии, а муфта расцепления привода на ведущие колеса остается разомкнутой. Требуемый крутящий момент насосного колеса гидротрансформатора возрастает в ответ на отпускание водителем тормозной педали и последующее увеличение крутящего момента требования водителя. Крутящий момент требования водителя может быть тормозным моментом двигателя, крутящим моментом насосного колеса гидротрансформатора, крутящим моментом колес или другим крутящим моментом привода на ведущие колеса. Масса транспортного средства остается на нижнем уровне, и SOC устройства накопления энергии начинает уменьшаться, так как DISG в одиночестве приводит в движение транспортное средство.
В момент T2 времени, требуемый крутящий момент насосного колеса гидротрансформатора повысился до уровня, где двигатель автоматически запускается, и муфта расцепления привода на ведущие колеса смыкается в ответ на запрос крутящего момента водителя (не показано). Двигатель может автоматически запускаться без непосредственного водительского ввода в устройство, которое имеет исключительное назначение запуска и/или останова двигателя (например, замок зажигания), когда крутящий момент требования водителя превышает пороговый уровень крутящего момента. Скорость транспортного средства продолжает возрастать в ответ на увеличение крутящего момента насосного колеса гидротрансформатора. Масса транспортного средства остается на нижнем уровне, и SOC устройства накопления энергии продолжает уменьшаться по мере того, как разгоняется транспортное средство. Тормозная педаль транспортного средства остается в неактивном положении.
В момент T3 времени, транспортное средство начинает замедляться в ответ на уменьшенный запрос крутящего момента водителя. Масса транспортного средства находится на более низком уровне, и SOC устройства накопления энергии больше, чем пороговый уровень 1004, поэтому, муфта расцепления привода на ведущие колеса размыкается, и двигатель останавливается в ответ на вхождение транспортного средства в режим замедления, в то время как снижается крутящий момент требования водителя. Требуемый крутящий момент насосного колеса гидротрансформатора уменьшается в ответ на уменьшенный крутящий момент требования водителя. Состояние тормозной педали транспортного средства остается отключенным, и устройство накопления энергии начинает заряжаться посредством DISG, преобразующего инерцию транспортного средства в электрическую энергию.
Между моментом T3 времени и моментом T4 времени, транспортное средство стоит, и тормоз транспортного средства нажимается водителем. SOC устройства накопления энергии повысился, и муфта расцепления привода на ведущие колеса остается в разомкнутом состоянии. Двигатель также остается в отключенном состоянии.
В момент T4 времени, увеличивается масса транспортного средства. Масса транспортного средства может возрастать, например, когда водитель или кто-нибудь добавляет груз или пассажиров в транспортное средство. Скорость транспортного средства остается на нуле, а двигатель остается отключенным. Требуемый крутящий момент насосного колеса гидротрансформатора остается на нижнем уровне, и SOC устройства накопления энергии остается незаряженным. Муфта расцепления привода на ведущие колеса также остается в разомкнутом состоянии.
В момент T5 времени, водитель отпускает тормозную педаль, и выходной крутящий момент DISG возрастает по мере того, как возрастает требуемый крутящий момент насосного колеса гидротрансформатора. Требуемый крутящий момент насосного колеса гидротрансформатора возрастает в ответ на отпускание водителем тормоза и увеличение крутящего момента требования водителя. SOC устройства накопления энергии начинает уменьшаться, так как DISG прикладывает крутящий момент к приводу на ведущие колеса транспортного средства. Скорость транспортного средства начинает постепенно возрастать. Однако, поскольку масса транспортного средства увеличилась, транспортное средство разгоняется с более медленным темпом. Контроллер начинает оценивать изменение массы транспортного средства на основании крутящего момента, который приложен к приводу на ведущие колеса и темпу ускорения транспортного средства.
Между моментом T5 времени и моментом T6 времени, двигатель автоматически перезапускается в ответ на крутящий момент насосного колеса гидротрансформатора, возрастающий до большего, чем пороговый уровень. Муфта расцепления привода на ведущие колеса также смыкается в ответ на крутящий момент насосного колеса гидротрансформатора, являющийся большим, чем пороговый уровень. SOC устройства накопления энергии уменьшается, и DISG выдает крутящий момент привода на ведущие колеса.
В момент T6 времени, водитель уменьшает крутящий момент требования водителя и нажимает тормоз транспортного средства. Двигатель остается работающим, и муфта расцепления привода на ведущие колеса остается введенной в зацепление, так что двигатель может обеспечивать торможение во время замедления транспортного средства. Двигатель остается работающим, так как масса транспортного средства увеличилась, и так как SOC устройства накопления энергии меньше, чем пороговый уровень 1002. Таким образом, установка момента размыкания муфты расцепления привода на ведущие колеса может задерживаться или подвергаться запаздыванию по мере того, как возрастает масса транспортного средства. Подобным образом, установка момента размыкания муфты расцепления привода на ведущие колеса может подвергаться опережению по мере того, как масса транспортного средства уменьшается. Масса транспортного средства остается на более высоком уровне, и транспортное средство замедляется до нулевой скорости. SOC устройства накопления энергии возрастает по мере того, как транспортное средство замедляется.
В момент T7 времени, муфта расцепления привода на ведущие колеса размыкается, и двигатель останавливается, в то время как скорость транспортного средства приближается к нулю. Тормоз транспортного средства остается в нажатом состоянии, и требуемый крутящий момент насосного колеса гидротрансформатора остается на нижнем уровне. Масса транспортного средства остается неизменной, в то время как транспортное средство остановлено.
В момент Т8времени, тормозная педаль отпускается водителем, и двигатель автоматически запускается. В настоящем примере, муфта расцепления привода на ведущие колеса разомкнута, когда двигатель остановлен; однако, в некоторых примерах, муфта расцепления привода на ведущие колеса остается сомкнутой, так что двигатель и DISG разгоняются до рабочей скорости вращения одновременно. Двигатель перезапускается по отпусканию тормозной педали в ответ на повышенную массу транспортного средства. Таким образом, может быть возможным снижать вероятность ускорения транспортного средства с меньшим, чем требуемый, темпом, поскольку двигатель и DISG имеются в распоряжении, в то время как отпускается тормозная педаль. Кроме того, двигатель и DISG могут прикладывать крутящий момент медленного движения, который приводит в движение транспортное средство таким же темпом, как когда транспортное средство является ненагруженным, и когда приводится в движение только посредством DISG, когда водитель не выжимает педаль акселератора транспортного средства.
Требуемый крутящий момент насосного колеса гидротрансформатора также повышается в ответ на увеличение оцененной массы транспортного средства. Требуемый крутящий момент насосного колеса гидротрансформатора повышается, так что транспортное средство разгоняется сходным образом, как когда транспортное средство разгоняется в момент времени, когда масса транспортного средства меньше (например, в момент T1 времени). Таким образом, для аналогичного входного сигнала педали акселератора, транспортное средство разгоняется подобным образом тому, когда масса транспортного средства уменьшена, а входной сигнал педали акселератора является таким же. Таким образом, водитель может испытывать сходное ускорение транспортного средства для эквивалентного входного сигнала педали акселератора, даже когда изменяется масса транспортного средства.
Таким образом, способы и системы по фиг. 1-3 и 9-10 предусматривают эксплуатацию транспортного средства с гибридным приводом, содержащую: регулирование работы муфты расцепления привода на ведущие колеса в ответ на изменение массы транспортного средства. Способ дополнительно содержит регулирование временных характеристик останова двигателя в ответ на изменение массы транспортного средства. Способ включает в себя те случаи, когда регулирование работы муфты расцепления привода на ведущие колеса включает в себя задержку установки момента размыкания муфты расцепления привода на ведущие колеса в ответ на увеличение массы транспортного средства. Способ включает в себя те случаи, когда регулирование работы муфты расцепления привода на ведущие колеса включает в себя осуществление опережения установки момента размыкания муфты расцепления привода на ведущие колеса в ответ на уменьшение массы транспортного средства. Способ дополнительно содержит регулирование порогового значения состояния заряда устройства накопления энергии в ответ на массу транспортного средства. Способ включает в себя те случаи, когда регулирование порогового значения состояния заряда устройства накопления энергии включает в себя повышение порогового значения состояния заряда устройства накопления энергии в ответ на массу транспортного средства.
В еще одном примере, способы и системы по фиг. 1-8 предусматривают эксплуатацию транспортного средства с гибридным приводом, содержащую: регулирование работы муфты расцепления привода на ведущие колеса в ответ на изменение массы транспортного средства; и автоматический останов двигателя в момент времени, который реагирует на изменение массы транспортного средства. Способ дополнительно содержит не запуск двигателя в ответ на массу транспортного средства, когда масса транспортного средства является первой массой транспортного средства. Способ дополнительно содержит запуск двигателя в ответ на массу транспортного средства, когда масса транспортного средства является второй массой транспортного средства. Способ включает в себя те случаи, когда вторая масса транспортного средства является большей, чем первая масса транспортного средства. Способ дополнительно содержит подачу по меньшей мере часть крутящего момента медленного движения через двигатель после запуска двигателя.
В некоторых примерах, способ включает в себя те случаи, когда крутящий момент медленного движения подается исключительно через DISG, когда двигатель не перезапущен, и когда транспортное средство с гибридным приводом перемещается. Способ дополнительно содержит регулирование требуемого крутящего момента насосного колеса гидротрансформатора в ответ на изменение массы транспортного средства. Способ включает в себя те случаи, когда регулирование требуемого крутящего момента насосного колеса гидротрансформатора включает в себя повышение требуемого крутящего момента насосного колеса гидротрансформатора, когда изменение массы транспортного средства увеличивает массу транспортного средства. Способ включает в себя те случаи, когда регулирование крутящего момента насосного колеса гидротрансформатора включает в себя снижение крутящего момента насосного колеса гидротрансформатора, когда изменение массы транспортного средства уменьшает массу транспортного средства.
В еще одном примере, способы и системы по фиг. 1-8 предусматривают эксплуатацию транспортного средства с гибридным приводом, содержащую: регулирование работы муфты расцепления привода на ведущие колеса, которая находится в связи с двигателем, в ответ на изменение массы транспортного средства; автоматический останов двигателя в ответ на первое состояние заряда устройства накопления энергии, являющееся большим, чем первое пороговое состояние заряда, первое пороговое состояние заряда основано на первой массе транспортного средства до изменения массы транспортного средства; и автоматический останов двигателя в ответ на второе состояние заряда устройства накопления энергии, являющееся большим, чем второе пороговое состояние заряда, второе пороговое состояние заряда основано на второй массе транспортного средства после изменения массы транспортного средства. Таким образом, муфта расцепления привода на ведущие колеса может приводиться в действие, чтобы улучшать рабочие характеристики транспортного средства на основании массы транспортного средства.
В некоторых примерах, способ включает в себя те случаи, когда второе пороговое состояние заряда больше, чем первое пороговое состояние заряда. Способ включает в себя те случаи, когда вторая масса транспортного средства является большей, чем первая масса транспортного средства. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса разомкнута, когда двигатель остановлен. Способ также включает в себя те случаи, когда муфта расцепления привода на ведущие колеса сомкнута, когда двигатель остановлен.
Далее, со ссылкой на фиг. 11, показана блок-схема последовательности операций способа для запуска двигателя посредством первой электрической машины или второй электрической машины. Способ по п. 11 может храниться в постоянной памяти контроллера 12 по фиг. 1-3 в качестве выполняемых команд.
На 1102, способ 1100 определяет условия эксплуатации транспортного средства. Условия эксплуатации транспортного средства может включать в себя, но не в качестве ограничения, скорость вращения двигателя, скорость вращения DISG, скорость транспортного средства, потребление крутящего момента привода на ведущие колеса, температуру охлаждающей жидкости двигателя и рабочее состояние муфты расцепления привода на ведущие колеса (например, разомкнутое, частично разомкнутое или сомкнутое). Способ 1100 переходит на 1104 после того, как определены условия эксплуатации.
На 1104, способ 1100 оценивает, присутствуют или нет условия для останова вращения двигателя. В одном из примеров, вращение двигателя может останавливаться, когда требуемый крутящий момент привода на ведущие колеса (например, объединенный крутящий момент, выдаваемый через двигатель и/или DISG), меньше, чем пороговая величина крутящего момента. Если способ 1100 делает вывод, что условия для останова вращения двигателя отсутствуют, способ 1100 переходит на 1106. Иначе, способ 1100 переходит на 1110.
На 1106, способ 1100 приводит в действие двигатель. Двигатель приводится в действие посредством выдачи икры и/или топлива в двигатель на основании условий эксплуатации двигателя. В некоторых примерах, где двигатель является дизельным двигателем или двигателем с воспламенением от сжатия однородного заряда (HCCI), двигатель может приводиться в действие без искры. Способ 1100 переходит на 1108 после того, как двигатель приведен в действие.
На 1108, способ 1100 выдает крутящий момент с двигателя на колеса транспортного средства. Крутящий момент двигателя может обеспечиваться на колеса транспортного средства посредством смыкания муфты расцепления привода на ведущие колеса и направлением выходной мощности двигателя через трансмиссию на колеса транспортного средства. В некоторых примерах, крутящий момент двигателя и DISG может подаваться на колеса транспортного средства одновременно. Способ 1100 переходит выход после того, как крутящий момент двигателя выдается на колеса транспортного средства.
На 1110, способ 1100 останавливает вращение двигателя и размыкает или расцепляет муфту расцепления привода на ведущие колеса. Вращение двигателя может останавливаться посредством запрещения потока топлива и/или воздуха в цилиндры двигателя. Способ 1100 переходит на 1112 после того, как двигатель остановлен. Отметим, что DISG может продолжать обеспечивать крутящий момент на колеса транспортного средства в ответ на запрос водителя, в то время как двигатель остановлен.
На 1112, способ 1100 оценивает, присутствуют или нет условия для перезапуска двигателя. В одном из примеров, двигатель может перезапускаться, когда команда крутящего момента привода на ведущие колеса превышает пороговую величину крутящего момента. В других примерах, двигатель может запускаться, когда температура каталитического нейтрализатора снижается до меньшей, чем пороговая температура. Если способ 1100 делает вывод, что присутствуют выбранные условия для перезапуска двигателя, способ 1100 переходит на 1114. Иначе, способ 1100 возвращается на 1104.
На 1114, способ 1100 определяет имеющуюся в распоряжении величину крутящего момента из DISG. Величина крутящего момента, имеющегося в распоряжении из DISG, основана на номинальном крутящем моменте DISG, состоянии заряда аккумуляторной батареи, скорости вращения DISG и температуре DISG. Таблица, описывающая имеющийся в распоряжении крутящий момент DISG, хранится в памяти и индексируется посредством состояния заряда аккумуляторной батареи (например, напряжения аккумулятора и номинального значения ампер-часов), скорости вращения DISG и температуры DISG. Таблица выводит величину имеющегося в распоряжении крутящего момента из DISG. Способ 1100 переходит на 1116 после того, как определен имеющийся в распоряжении крутящий момент DISG.
На 1116, способ 1100 оценивает, имеет или нет DISG несущую способность, чтобы запускать двигатель и при условии требуемой величины крутящего момента. В одном из примеров, требуемая величина крутящего момента определяется по меньшей мере частично по педали акселератора, которую водитель регулирует, чтобы менять требуемый крутящий момент привода на ведущие колеса. Крутящий момент для запуска двигателя может определяться опытным путем и сохраняться в таблице или функции в памяти. Таблица или функция может индексироваться посредством температуры двигателя и времени после последнего останова двигателя. Таблица выводит крутящий момент для достижения требуемой скорости вращения проворачивания коленчатого вала двигателя (например, 250 оборотов в минуту) от нулевой скорости вращения. Крутящий момент для запуска двигателя прибавляется к требуемому крутящему моменту привода на ведущие колеса, выдаваемому водителем, и величина имеющегося в распоряжении крутящего момента DISG вычитается из суммы крутящего момента для запуска двигателя и требуемого крутящего момента привода на ведущие колеса. Если результат положителен, DISG не хватает несущей способности для обеспечения крутящего момента для запуска двигателя и выдачи требуемого крутящего момента привода на ведущие колеса. Следовательно, способ 1100 переходит на 1124. Если результат отрицателен, DISG обладает несущей способностью для обеспечения крутящего момента для запуска двигателя и выдачи требуемого крутящего момента привода на ведущие колеса. Поэтому, способ 1100 переходит на 1118.
На 1118, способ 1100 оценивает, были или нет запрошен запуск двигателя. Если так, способ 1100 переходит на 1120. Иначе, способ 1100 переходит на 1122. Способ 1100 может делать вывод, что запрос запуска двигателя произведен, например, когда возрастает запрос крутящего момента двигателя, или когда водитель отпускает тормозную педаль.
На 1120, способ 1100 подает крутящий момент DISG на колеса транспортного средства и на двигатель. Крутящий момент DISG выдается на двигатель посредством смыкания муфты расцепления привода на ведущие колеса и передачи крутящего момента с DISG на двигатель. Муфта расцепления привода на ведущие колеса может частично смыкаться для регулирования скорости вращения двигателя во время запуска двигателя. Двигатель может вращаться на скорости вращения проворачивания коленчатого вала (например, 250 оборотов в минуту) или на базовой скорости вращения холостого хода (например, 800 оборотов в минуту) до того, как топливо и искра подаются в двигатель. Способ 1100 возвращается на 1104 после того, как крутящий момент DISG выдается на двигатель и колеса транспортного средства.
На 1122, способ 1100 подает крутящий момент DISG только на колеса транспортного средства. Крутящий момент DISG, выдаваемый на колеса транспортного средства, может быть основан на входном сигнале педали акселератора и/или входном сигнале из контроллера. Способ 1100 возвращается на 1104 после того, как крутящий момент DISG выдается на колеса транспортного средства.
На 1124, способ 1100 оценивает, присутствует или нет запрос запуска двигателя. Запрос запуска двигателя может происходить, как описано на 1118. Если запрошен запуск двигателя, способ 1100 переходит на 1126. Иначе, способ 1100 переходит на 1122.
На 1126, способ 1100 запускает двигатель посредством второй электрической машины, которая имеет более низкую мощность на выходном валу, чем DISG. Например, двигатель может запускаться с помощью традиционного стартера, который включает в себя ведущий вал зубчатой передачи и ведущую шестерню, которые избирательно вводятся в зацепление с маховиком двигателя для запуска двигателя. Муфта расцепления привода на ведущие колеса смыкается, когда вторая электрическая машина является выдающей крутящий момент исключительно для вращения двигателя. Кроме того, топливо и искра выдаются в двигатель на 1126, чтобы инициировать сгорание в двигателе, так что двигатель вращается в силу своей собственной мощности. Способ 1100 переходит на 1128 после того, как запущен двигатель.
На 1128, способ 1100 вводит в зацепление муфту расцепления привода на ведущие колеса, чтобы дать возможность передачи крутящего момента с двигателя на колеса транспортного средства. В одном из примеров, скорость вращения двигателя повышается до тех пор, пока скорость вращения двигателя не соответствует скорости вращения DISG. Муфта расцепления привода на ведущие колеса смыкается, когда скорость вращения двигателя соответствует скорости вращения DISG, чтобы снижать вероятность привнесения возмущений крутящего момента в привод на ведущие колеса. Способ 1100 переходит на выход после того, как двигатель запущен и является подающим крутящий момент на колеса транспортного средства.
Должно быть отмечено, что способ по п. 11 показывает только один пример запуска двигателя исключительно посредством электрической машины более низкой мощности (стартерного электродвигателя) или исключительно посредством электрической машины с более высокой несущей способностью (DISG). Другие примеры также допускаются. Например, когда работоспособны как DISG, так и стартерный электродвигатель более низкой мощности, DISG и стартерный электродвигатель более низкой мощности могут запускать двигатель во время разных условий эксплуатации. Однако, если DISG выведен из работы, стартер более низкой мощности может запускать двигатель после того, как двигатель был автоматически остановлен из вращения, во время условий, где, иначе, DISG запускал бы двигатель. Например, стартер более низкой мощности может запускать двигатель, где DISG является способным к запуску двигателя и выдаче крутящего момента в привод на ведущие колеса, но является выведенным из работы. С другой стороны, если стартерный электродвигатель более низкой мощности выведен из работы, двигатель может запускаться посредством DISG, когда потребление крутящего момента привода на ведущие колеса находится на более низком пороговом уровне, поскольку стартерного электродвигателя более низкой мощности нет в распоряжении.
Далее, со ссылкой на фиг. 12, показан график примерной последовательности для запуска двигателя согласно способу по фиг. 11. Вертикальные метки T10-T17 представляют интересующие моменты времени в последовательности. Последовательность по фиг. 12 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 12 представляет собой крутящий момент DISG в зависимости от времени. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Ось Y представляет крутящий момент DISG, и крутящий момент DISG увеличивается в направлении стрелки оси Y. Горизонтальная линия 1202 представляет величину имеющегося в распоряжении крутящего момента DISG. Горизонтальная линия 1204 представляет величину крутящего момента, которую DISG может обеспечивать на вход трансмиссии, пока DISG проворачивает коленчатый вал двигателя. Перепад между горизонтальными линиями 1202 и 1204 представляет величину крутящего момента для проворачивания коленчатого вала двигателя для запуска.
Второй график сверху по фиг. 12 представляет собой скорость вращения двигателя в зависимости от времени. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y.
Третий график сверху по фиг. 12 представляет состояние муфты расцепления привода на ведущие колеса (например, разомкнутое или сомкнутое) в зависимости от времени. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Ось Y представляет состояние муфты расцепления привода на ведущие колеса, и состояние муфты расцепления является разомкнутым на верхней стороне и сомкнутым возле оси X, как указано.
Четвертый график сверху по фиг. 12 представляет состояние стартера более низкой выходной мощности в зависимости от времени. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Ось Y представляет состояние стартера низкой выходной мощности, и состояние стартера низкой выходной мощности является введенным в зацеплении, когда кривая находится на нижнем уровне, и расцепленным, когда кривая находится на верхнем уровне.
Пятый график сверху по фиг. 12 представляет собой состояние запроса запуска двигателя в зависимости от времени. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Ось Y представляет состояние запроса запуска двигателя, и состояние запроса запуска двигателя установлено для запуска или вращения, когда кривая находится на верхнем уровне. Запрос запуска двигателя не установлен или является указывающим останов двигателя, когда кривая находится на нижнем уровне.
В момент T10 времени, крутящий момент DISG находится на нижнем уровне в ответ на низкий запрос крутящего момента привода на ведущие колеса (не показано). Запрос крутящего момента привода на ведущие колеса может возникать из педали акселератора или другого устройства и может быть реагирующим на водительский входной сигнал. Двигатель также остановлен, а муфта расцепления привода на ведущие колеса разомкнута. Стартер более низкой выходной мощности не зацеплен, и нет запроса запуска двигателя.
В момент T11 времени, запрос запуска двигателя выдается, в то время как крутящий момент DISG меньше, чем пороговое значение 1204. Запрос запуска двигателя может производиться в ответ на состояние заряда аккумуляторной батареи (SOC) или другое условие. Стартер низкой выходной мощности остается неактивным, и муфта расцепления привода на ведущие колеса смыкается вскоре после этого. Смыкание муфты расцепления привода на ведущие передает крутящий момент с DISG на двигатель, тем самым, прокручивая коленчатый вал двигателя. Двигатель запускается вскоре после того, как DISG по меньшей мере частично сомкнут. Муфта расцепления привода на ведущие колеса может проскальзывать, в то время как двигатель подвергается проворачиванию коленчатого вала и во время увеличения скорости вращения двигателя от останова двигателя до скорости вращения DISG.
В момент T12 времени, запрос пуска/вращения переходит на низкий уровень в ответ на условия эксплуатации транспортного средства (например, заряженную аккумуляторную батарею и примененную тормозную педаль транспортного средства). Муфта расцепления привода на ведущие колеса размыкается, и двигатель останавливается в ответ на запрос запуска/вращения двигателя. DISG продолжает подавать крутящий момент в привод на ведущие колеса транспортного средства.
Между моментом T12 времени и моментом T13 времени, выходной крутящий момент DISG возрастает в ответ на повышенный крутящий момент требования водителя (не показан). Двигатель остается отключенным, а муфта расцепления привода на ведущие колеса остается разомкнутой.
В момент T13 времени, запрос запуска/вращения двигателя устанавливается в ответ на SOC аккумуляторной батареи, являющееся меньшим, чем пороговый уровень заряда (не показан). Стартер низкой выходной мощности вводится в действие, как указано после того, как крутящий момент DISG больше, чем пороговый крутящий момент, на 1204. Муфта расцепления привода на ведущие колеса разомкнута, в то время как двигатель подвергается проворачиванию коленчатого вала стартером более низкой выходной мощности. Стартер низкой выходной мощности выводится из работы, когда скорость вращения двигателя превышает скорость вращения проворачивания коленчатого вала двигателя.
В момент T14 времени, муфта расцепления привода на ведущие колеса смыкается после того, как скорость вращения двигателя достигает скорости вращения DISG. Запрос запуска/вращения двигателя остается установленным, и как DISG, так и двигатель выдают крутящий момент в привод на ведущие колеса транспортного средства.
В момент T15 времени, запрос запуска/вращения двигателя переходит на нижний уровень, чтобы указывать, что двигатель должен останавливаться. Вскоре после этого, двигатель останавливается, и муфта расцепления привода на ведущие колеса размыкается в ответ на запрос запуска/вращение двигателя, переходящий на нижний уровень. DISG продолжает подавать крутящий момент в привод на ведущие колеса транспортного средства.
В момент T16 времени, запрос запуска/вращения двигателя устанавливается в ответ на крутящий момент требования водителя, превышающий пороговый крутящий момент (не показан). Двигатель перезапускается, так что двигатель может выводить крутящий момент в привод на ведущие колеса для усиления крутящего момента DISG. Стартер низкой выходной мощности вводится в зацепление в ответ на запрос запуска/вращения двигателя, переходящий на верхний уровень. Стартер низкой выходной мощности расцепляется в ответ на скорость вращения двигателя, превышающую пороговую скорость вращения.
В момент T17 времени, муфта расцепления привода на ведущие колеса смыкается в ответ на скорость вращения двигателя, достигающую скорости вращения DISG. Двигатель и DISG подают крутящий момент в привод на ведущие колеса транспортного средства после того, как сомкнута муфта расцепления привода на ведущие колеса.
Таким образом, двигатель может запускаться посредством DISG или стартера более низкой выходной мощности. Стартер более низкой мощности предоставляет DISG возможность выводить большую величину крутящего момента в привод на ведущие колеса, чем было бы возможным, если бы только DISG обладал способностью проворачивания коленчатого вала двигателя. Кроме того, стартер более низкой выходной мощности предоставляет числу оборотов двигателя возможность достигать скорости вращения DISG до того, как муфта расцепления привода на ведущие колеса смыкается, так чтобы небольшое возмущение крутящего момента могло быть заметным в приводе на ведущие колеса транспортного средства.
Таким образом, способы и системы по фиг. 1-3 и 11-12 предусматривают запуск двигателя, содержащий: во время первого условия, запускают двигатель первой электрической машиной, в то время как муфта расцепления привода на ведущие колеса сомкнута; и во время второго условия, запускают двигатель второй электрической машиной, в то время как муфта расцепления привода на ведущие колеса разомкнута. Способ включает в себя те случаи, когда вторая электрическая машина имеет более низкую выходную мощность, чем первая электрическая машина. Способ включает в себя те случаи, когда первая электрическая машина является встроенным в привод на ведущие колеса стартером/генератором (DISG), и где муфта расцепления привода на ведущие колеса имеет первую сторону, механически присоединенную к маховику двойной массы, и вторую сторону, механически присоединенную к DISG.
В некоторых примерах, способ включает в себя те случаи, когда первое условие является требуемым крутящим моментом привода на ведущие колеса, который меньше, чем крутящий момент привода на ведущие колеса во время второго условия. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса размыкается в ответ на требуемый крутящий момент привода на ведущие колеса. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса смыкается, когда сумма требуемого крутящего момента привода на ведущие колеса и крутящего момента запуска двигателя является большей, чем пороговая величина крутящего момента. Способ включает в себя те случаи, когда первая электрическая машина расположена ниже по потоку от двигателя и выдает крутящий момент через гидротрансформатор, который вращает колеса транспортного средства, и где вторая электрическая машина расположена на двигателе и не выдает крутящий момент через гидротрансформатор для вращения колес транспортного средства выше скорости вращения проворачивания коленчатого вала двигателя, которая является более низкой, чем скорость вращения холостого хода двигателя.
В других примерах, способы и системы по фиг. 1-3 и 11-12 предусматривают запуск двигателя, содержащий: запуск двигателя посредством первой электрической машины, когда желательное потребление крутящего момента меньше, чем первая пороговая величина; запуск двигателя посредством второй электрической машины, когда желательное потребление крутящего момента больше, чем первая пороговая величина; и подачу крутящего момента, достаточного для вращения колес транспортного средства, исключительно посредством первой электрической машины во время выбранных условий эксплуатации. Таким образом, разные электрические машины могут запускать двигатель во время разных условий.
Способ включает в себя те случаи, когда первая электрическая машина является встроенным в привод на ведущие колеса стартером/генератором (DISG), и где DISG расположен в приводе на ведущие колеса транспортного средства с гибридным приводом в местоположении между муфтой расцепления привода на ведущие колеса и трансмиссией. Способ включает в себя те случаи, когда DISG выдает крутящий момент для запуска вращения остановленного двигателя посредством по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса. Способ дополнительно содержит отсоединение второй электрической машины от двигателя, когда скорость вращения двигателя достигает пороговой скорости вращения. Способ включает в себя те случаи, когда вторая электрическая машина включает в себя ведущий вал зубчатой передачи и ведущую шестерню. Способ включает в себя те случаи, когда первая пороговая величина меняется в зависимости от состояния заряда аккумуляторной батареи. Способ также включает в себя те случаи, когда первая пороговая величина меняется в зависимости от скорости вращения первой электрической машины.
Способы и системы по фиг. 1-3 и 11-12 также предусматривают систему транспортного средства с гибридным приводом, содержащую: двигатель; стартер, избирательно зацепляемый с двигателем и включающий в себя ведущую шестерню; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для запуска двигателя посредством стартера во время первого запуска и посредством DISG во время второго запуска.
В некоторых примерах, система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для запуска двигателя посредством стартера во время условий требуемого крутящего момента, большего, чем пороговое значение. Система транспортного средства с гибридным приводом включает в себя те случаи, когда двигатель запускается посредством вращения двигателя с помощью DISG, и дополнительно содержащая дополнительные команды для отсоединения DISG от двигателя после заданного количества событий сгорания. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для присоединения двигателя к DISG после того, как скорость вращения двигателя достигает скорости вращения DISG. Система транспортного средства с гибридным приводом включает в себя те случаи, когда имеющаяся в распоряжении выходная мощность от стартера, меньше, чем имеющаяся в распоряжении выходная мощность из DISG. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для автоматического останова двигателя, и где двигатель запускается посредством DISG на основании имеющейся в распоряжении величины крутящего момента на выходном валу DISG.
Далее, со ссылкой на фиг. 13, показана блок-схема последовательности операций способа для регулирования впрыска топлива, чтобы обеспечивать требуемую траекторию скорости вращения двигателя во время запуска двигателя. Способ по фиг. 13 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг. 1-3.
На 1302, способ 1300 оценивает, запрошен или нет запуск двигателя, и введена или нет в зацепление муфта расцепления привода на ведущие колеса. Способ 1300 может делать вывод, что запуск двигателя требуется, когда переменная запуска двигателя установлена в памяти. Способ 1300 может делать вывод, что муфта расцепления привода на ведущие колеса расцепляется, когда переменная разъединенного состояния муфты расцепления привода на ведущие колеса не установлена в памяти. Если способ 1300 делает вывод, что запуск двигателя требуется, а муфта расцепления привода на ведущие колеса не введена в зацепление, способ 1300 переходит на 1304. Иначе, способ 1300 переходит на 1316.
На 1304, способ 1300 определяет условия эксплуатации. Условия эксплуатации могут включать в себя, но не в качестве ограничения, скорость вращения DISG, температуру двигателя, время после останова вращения двигателя и состояние муфты расцепления привода на ведущие колеса. Способ 1300 переходит на 1306 после того, как определены условия эксплуатации.
На 1306, способ 1300 определяет требуемую скорость вращения двигателя на основании скорости вращения насосного колеса гидротрансформатора. Кроме того, требуемый заряд воздуха цилиндра может определяться на 1306, так что может достигаться требуемая скорость вращения двигателя. В одном из примеров, требуемая скорость вращения двигателя после увеличения скорости вращения двигателя (например, от скорости вращения проворачивания коленчатого вала до требуемой скорости вращения холостого хода) регулируется на скорость вращения насосного колеса гидротрансформатора. Таким образом, после увеличения скорости вращения двигателя во время запуска двигателя, скорость вращения двигателя регулируется по скорости вращения насосного колеса гидротрансформатора, так что муфта расцепления привода на ведущие колеса может смыкаться, чтобы передавать крутящий момент двигателя на колеса транспортного средства, не создавая возмущений крутящего момента. Двигатель может подвергаться проворачиванию коленчатого вала посредством вращения двигателя стартером, иным чем DISG (например, стартер более низкой выходной мощности), если требуется. Способ 1300 переходит на 1308 после того, как выбрана требуемая скорость вращения двигателя. Должно быть отмечено, что скорость вращения насосного колеса гидротрансформатора эквивалентна скорости вращения DISG, поскольку DISG присоединен к насосному колесу гидротрансформатора.
На 1308, регулируется впрыск топлива для первого события сгорания. В одном из примеров, где двигатель включает в себя почти центрально расположенную топливную форсунку в верхней части камеры сгорания, топливо впрыскивается в по меньшей мере один цилиндр посредством одиночного импульса топлива в течение такта сжатия цилиндра и во время одиночного цикла цилиндра. Впрыскиваемое топливо, в таком случае, содействует первому событию сгорания после останова двигателя для цилиндра, принимающего топливо. После того, как одиночный импульс топлива впрыснут в цилиндр, впрыски топлива в течение увеличения скорости вращения могут впрыскиваться последовательностью импульсов во время тактов впуска и сжатия цилиндра, принимающего топливо, как описано на 1310. В одном из примеров, одиночный импульс топлива впрыскивается в каждый из заданного количества цилиндров двигателя во время тактов сжатия цилиндров. Таким образом, топливо впрыскивается в каждый из заданного количества цилиндров за один или более импульсов в течение цикла цилиндра, принимающего топливо. Например, для четырехцилиндрового двигателя, два цилиндра двигателя принимают одиночный впрыск топлива во время соответственных тактов впрыска цилиндров, принимающих одиночный впрыск топлива. Другие два цилиндра двигателя принимали многочисленные впрыски топлива во время тактов впуска и/или сжатия цилиндра, принимающего топливо.
Во втором примере, где двигатель включает в себя впрыск топлива, расположенный на боковой стороне камеры сгорания, многочисленные впрыски топлива для каждого цилиндра подаются на заданное количество цилиндров двигателя во время такта сжатия цилиндра, принимающего топливо, для первого события сгорания в цилиндре после останова двигателя. После того, как заданное количество цилиндров принимают многочисленные впрыски топлива в течение такта сжатия цилиндра, принимающего топливо, многочисленные впрыски топлива могут подаваться в каждый цилиндр в течение тактов впуска и/или сжатия цилиндра, принимающего топливо. Дополнительно, положения дросселя двигателя может регулироваться на 1308 на основании требуемой скорости вращения двигателя. В одном из примеров, величина открывания дросселя двигателя повышается по мере того, как требуемая скорость вращения двигателя возрастает во время проворачивания коленчатого вала. Способ 1300 переходит на 1310 после того, как топливо впрыснуто для первых событий сгорания каждого цилиндра двигателя.
На 1310, способ 1300 регулирует установку момента и количества топлива разделенного впрыска топлива на основании требуемой скорости вращения двигателя и разности скоростей вращения между фактической скоростью вращения двигателя и требуемой скоростью вращения двигателя. В частности, на более низких скоростях вращения двигателя (например, между скоростью вращения проворачивания коленчатого вала в 250 оборотов в минуту и 400 оборотов в минуту), два или более впрыска подаются в каждый цилиндр двигателя во время такта сжатия каждого цилиндра, принимающего топливо. На средних скоростях вращения двигателя (например, между 400 оборотов в минуту и 700 оборотов в минуту), многочисленные впрыски топлива подаются во время тактов как впуска, так и сжатия каждого цилиндра, принимающего топливо. На более высоких скоростях вращения двигателя (например, от 700 оборотов в минуту до 1000 оборотов в минуту), многочисленные впрыски топлива подаются исключительно в течение такта впуска цилиндра, принимающего топливо. Конечно, более низкие, средние и более высокие скорости вращения двигателя могут различаться между применениями. Например, более низкое скорость вращения двигателя может находиться между 200 оборотов в минуту и 300 оборотов в минуту, среднее скорость вращения двигателя может находиться между 300 оборотов в минуту и 800 оборотов в минуту, а более высокое скорость вращения может находиться между 800 оборотов в минуту и 1100 оборотов в минуту для других применений. Таким образом, если требуемая скорость вращения двигателя является более высокой скоростью вращения двигателя, установка момента впрыска топлива регулируется, чтобы обеспечивать многочисленные впрыски топлива исключительно в течение такта впуска цилиндра, принимающего топливо, когда двигатель достигает требуемой скорости вращения двигателя. Если требуемая скорость вращения двигателя является средним скоростью вращения двигателя, установка момента впрыска топлива регулируется, чтобы обеспечивать многочисленные впрыски топлива в течение тактов впуска и сжатия цилиндра, принимающего топливо. Установка момента разделенного впрыска топлива на более высоких скоростях вращения двигателя предусматривает улучшенное смешивание топлива и пониженные выбросы двигателя. Разделенный впрыск топлива во время тактов сжатия и впуска предусматривает улучшенную стабильность сгорания и сниженную вероятность пропусков зажигания двигателя.
По мере того, как скорость вращения двигателя возрастает от скорости вращения проворачивания коленчатого вала (например, 250 оборотов в минуту) до требуемой скорости вращения холостого хода во время увеличения скорости вращения двигателя, время между окончанием впрыска (EOI) (например, установкой момента, где происходит последний импульс топлива, впрыскиваемого в цилиндр во время цикла цилиндра) и инициацией искрового зажигания (например, ±3 градуса). Поскольку время между разными положениями коленчатого вала уменьшается по мере того, как возрастает скорость вращения двигателя, установка момента EOI подвергается опережению относительно временных характеристик коленчатого вала, чтобы поддерживать по существу постоянное время (например, ±0,05 секунды) между EOI и инициацией искрового зажигания. Кроме того, когда выполняются многочисленные впрыски топлива, установка момента каждого из впрысков топлива во время цикла цилиндра может подвергаться опережению по мере того, как возрастает скорость вращения двигателя. Таким образом, начало впрыска топлива (SOI) в течение цикла цилиндра может подвергаться опережению по мере того, как скорость вращения двигателя возрастает во время увеличения скорости вращения двигателя.
Если требуемая скорость вращения двигателя больше, чем фактическая скорость вращения двигателя, величины впрыска топлива повышаются посредством увеличения длительности впрыска топлива. Дополнительный воздух также может обеспечиваться в двигатель посредством открывания дросселя. Если требуемая скорость вращения двигателя меньше, чем фактическая скорость вращения двигателя, величины впрыска топлива снижаются посредством уменьшения длительности впрыска топлива. Количество воздуха двигателя может уменьшаться посредством закрывания дросселя. Кроме того, установка момента впрыска топлива и количества топлива могут регулироваться в ответ на условия эксплуатации муфты расцепления привода на ведущие колеса, с тем чтобы с упреждением регулировать установку момента впрыска топлива. Например, если муфта расцепления привода на ведущие колеса является смыкающейся, и сторона двигателя муфты расцепления привода на ведущие колеса вращается медленнее, чем сторона DISG муфты расцепления привода на ведущие колеса, величина впрыска топлива может повышаться для разгона двигателя ближе к скорости вращения DISG и, тем самым, уменьшения возмущений крутящего момента привода на ведущие колеса. С другой стороны, если муфта расцепления привода на ведущие колеса является смыкающейся, и сторона двигателя муфты расцепления привода на ведущие колеса вращается быстрее, чем сторона DISG муфты расцепления привода на ведущие колеса, величина впрыска топлива может снижаться для замедления двигателя ближе к скорости вращения DISG. Кроме того, если муфта расцепления привода на ведущие колеса подвергается размыканию, величина впрыска топлива может снижаться в качестве функции силы прижатия муфты расцепления привода на ведущие колеса, чтобы замедлять двигатель до скорости вращения холостого хода и, тем самым, уменьшения возмущений крутящего момента привода на ведущие колеса. Подобным образом, если муфта расцепления привода на ведущие колеса размыкается, величина впрыска топлива может повышаться в качестве функции силы прижатия муфты расцепления привода на ведущие колеса, чтобы разгонять двигатель до скорости вращения холостого хода и, тем самым, уменьшения возмущений крутящего момента привода на ведущие колеса.
В некоторых примерах, установка момента впрыска топлива цилиндра двигателя регулируется в отношении такта цилиндра, который меняется по мере того, как меняется скорость вращения двигателя. Например, если разность скоростей вращения между фактической и требуемой скоростью вращения двигателя возрастает, способ 1300 перестраивает топливо с такта сжатия на такт впуска. Посредством изменения такта впрыска на основании разности скоростей вращения между фактической и требуемой скоростью вращения двигателя, может быть возможным улучшать смешивания топлива-воздуха и содействовать более полному сгоранию, так чтобы могла уменьшаться разность скоростей вращения.
Дополнительно, положение дросселя двигателя может регулироваться в ответ на установку момента того, когда топливо впрыскивается в цилиндр. Например, дроссель окна может частично закрываться, чтобы увеличивать движение заряда, когда топливо впрыскивается исключительно в течение такта впуска. Дроссель окна может частично открываться, в то время как впрыск топлива переходит с впрыска топлива во время такта сжатия на впрыск топлива во время такта впуска. Кроме того, количество топлива, впрыскиваемого в цилиндр во время цикла цилиндра, регулируется на основании количества воздуха, который протекает через дроссель. Способ 1300 переходит на 1312 после того, как отрегулирована установка момента впрыска топлива.
На 1312, способ 1300 регулирует установку момента зажигания в ответ на состояние муфты расцепления привода на ведущие колеса и разницу скоростей вращения между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя. В частности, когда скорость вращения двигателя находится по существу на скорости вращения DISG (например, ±100 оборотов в минуту), искровое зажигание подвергается запаздыванию до уровня, чтобы создавать нулевой крутящий момент на муфте расцепления привода на ведущие колеса. Кроме того, запаздывание искрового зажигания также может обеспечиваться на основании разности скоростей вращения между DISG и двигателя. По мере того, как уменьшается разность скоростей вращения между двигателем и DISG, величина запаздывания искры возрастает.
На 1314, способ 1300 оценивает, была или нет муфта расцепления привода на ведущие колеса сомкнута до требуемой величины (например, выдается 80% крутящего момента удерживания муфты). Муфта расцепления привода на ведущие колеса может смыкаться, когда скорость вращения двигателя находится в пределах заданной скорости вращения скорости вращения насосного колеса гидротрансформатора, так чтобы могли снижаться возмущения крутящего момента внутри привода на ведущие колеса. Если способ 1300 делает вывод, что муфта расцепления привода на ведущие колеса была сомкнута до пороговой величины, способ 1300 переходит на 1316. Иначе, способ 1300 возвращается на 1304.
На 1316, способ 1300 осуществляет опережение установки момента зажигания и переходит на впрыск топлива за одиночный впрыск топлива во время цикла цилиндра на основании количества событий сгорания после останова двигателя или на основании коэффициента трансформации крутящего момента. Например, после того, как муфта расцепления привода на ведущие колеса смыкается, способ 1300 может переходить с разделенного впрыска топлива на одиночный впрыск топлива во время цикла двигателя через 10 событий сгорания. В качестве альтернативы, способ 1300 может переходить с разделенного впрыска топлива на одиночный впрыск топлива во время цикла цилиндра после того, как установка момента впрыска была подвергнута опережению до установки момента, где коэффициент трансформации крутящего момента между установкой момента зажигания и установкой момента впрыска топлива меньше, чем пороговая величина. Способ 1300 переходит на выход после того, как установка момента впрыска топлива и установка момента зажигания переведены на базовые установки момента, которые определены опытным путем и сохранены в памяти.
Далее, со ссылкой на фиг. 14, показан график примерной последовательности для подачи топлива в двигатель согласно способу по фиг. 13. Последовательность по фиг. 14 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 14 представляет установку момента впрыска топлива для цилиндра номер один. Ось X представляет такт цилиндра для цилиндра номер один, и отдельные такты цилиндра указаны типичными буквами. Например, такт впуска представлен посредством I, такт сжатия представлен посредством C, рабочий такт представлен посредством P, и такт выпуска представлен посредством E. Ось Y представляет впрыск топлива.
Второй график сверху по фиг. 14 представляет требуемую скорость вращения насосного колеса гидротрансформатора в зависимости от такта цилиндра номер один. Распределение по времени оси X совпадает с распределением по времени первого графика сверху по фигуре. Ось Y представляет требуемую скорость вращения насосного колеса гидротрансформатора, и требуемая скорость вращения насосного колеса гидротрансформатора возрастает в направлении стрелки оси Y.
Третий график сверху по фиг. 14 представляет требуемую скорость вращения двигателя в зависимости от такта цилиндра номер один. Распределение по времени оси X совпадает с распределением по времени первого графика сверху по фигуре. Ось Y представляет требуемую скорость вращения двигателя, и требуемая скорость вращения двигателя увеличивается в направлении стрелки оси Y.
Четвертый график сверху по фиг. 14 представляет фактическую скорость вращения двигателя в зависимости от такта цилиндра номер один. Распределение по времени оси X совпадает с распределением по времени первого графика сверху по фигуре. Ось Y представляет фактическую скорость вращения двигателя, и фактическая скорость вращения двигателя увеличивается в направлении стрелки оси Y.
Пятый график сверху по фиг. 14 представляет разность между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя (дельту скорости вращения двигателя) в зависимости от такта цилиндра номер один. Распределение по времени оси X совпадает с распределением по времени первого графика сверху по фигуре. Ось Y представляет требуемую скорость вращения двигателя, и требуемая скорость вращения двигателя увеличивается в направлении стрелки оси Y.
В момент T18 времени, двигатель остановлен, и требуемая скорость вращения насосного колеса гидротрансформатора имеет значение ноль. Двигатель вращается после T18 циклически проходя через разные такты цилиндра номер один. Первая величина одиночного впрыска топлива подается непосредственно в цилиндр номер один во время такта сжатия цилиндра номер один. Двигатель начинает разгоняться с первого события сгорания во время первого такта сжатия после останова двигателя.
В момент T19 времени, два впрыска топлива выдаются во время второго такта сжатия цилиндра номер один. Впрыск топлива переходит на два впрыска в ответ на разность скорости вращения между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя. Кроме того, впрыск топлива подается во время такта цилиндра, который зависит от разности скорости вращения между фактической и требуемой скоростями вращения двигателя. В одном из примеров, установка момента впрыска топлива для такта цилиндра на основании разности между фактической и требуемой скоростью вращения двигателя хранится в таблице и выводит такт цилиндра на основании разности скоростей вращения. Посредством регулирования такта цилиндра, где происходит впрыск топлива, на основании разности между фактической и требуемой скоростью вращения двигателя, может быть возможным улучшать смешивание топлива и регулирование скорости вращения двигателя во время запуска двигателя.
Между моментом T19 времени и моментом T20 времени, установка момента впрыска топлива дополнительно регулируется в ответ на разность требуемой скорости вращения двигателя и фактической скорости вращения двигателя. Может наблюдаться, что впрыск топлива переключается с впрыска топлива дважды во время такта сжатия цилиндра на впрыск топлива один раз во время такта впуска и один раз во время такта сжатия. Дальше, впрыск топлива переходит на впрыск топлива дважды во время такта впуска.
В момент T20 времени, ошибка скорости вращения двигателя между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя обращается в ноль, и топливо впрыскивается один раз за каждый цикл двигателя. Таким образом, установка момента впрыска топлива может регулироваться, чтобы подавать топливо во время разных тактов двигателя в ответ на ошибку скорости вращения двигателя. Кроме того, установка момента впрыска топлива и установка момента зажигания могут регулироваться в ответ на состояние муфты расцепления привода на ведущие колеса или прикладываемую силу, как обсуждено со ссылкой на фиг. 13.
Способы и системы по фиг. 1-3 и 13-14 также предусматривают регулирование заряда воздуха цилиндра двигателя, содержащую: установку в требуемое положение дросселя для запуска двигателя; и регулирование установки момента впрыска топлива цилиндра под такт цилиндра, которая меняется по мере того, как меняется разность между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя, и регулирование количества топлива, подаваемого в цилиндр, в ответ на количество воздуха, проходящего дроссель. Способ включает в себя те случаи, когда такт цилиндра меняется от такта сжатия до такта впуска. Способ включает в себя те случаи, когда дроссель является дросселем окна.
В некоторых примерах, способ дополнительно содержит те случаи, когда дроссель окна по меньшей мере частично закрыт в течение впрыска топлива во время такта сжатия. Способ дополнительно содержит те случаи, когда дроссель окна открыт в течение впрыска топлива во время такта впуска цилиндра. Способ также включает в себя те случаи, когда установка момента впрыска топлива предусматривает по меньшей мере два впрыска топлива во время цикла цилиндра. Способ включает в себя те случаи, когда установка момента впрыска топлива подается на топливную форсунку, которая впрыскивает топливо непосредственно в цилиндр.
Способы и системы по фиг. 1-3 и 13-14 также предусматривают регулирование заряда воздуха цилиндра двигателя, содержащую: установку в требуемое положение дросселя для запуска двигателя; выдачу искры в камеру сгорания цилиндра во время цикла цилиндра; и регулирование установки момента впрыска топлива для поддержания по существу постоянного времени между искрой и моментом времени окончания впрыска топлива по мере того, как скорость вращения двигателя возрастает во время увеличения скорости вращения двигателя наряду с впрыском множества импульсов топлива во время цикла цилиндра; и регулирование количества топлива, подаваемого в цилиндр, в ответ на количество воздуха, проходящего дроссель; таким образом, может поддерживаться устойчивость сгорания.
Способ также включает в себя те случаи, когда установка момента впрыска топлива подвергается опережению по мере того, как возрастает скорость вращения двигателя. Способ дополнительно содержит те случаи, когда установка момента впрыска топлива происходит в ответ на требуемую скорость вращения двигателя, и при этом требуемая скорость вращения двигателя основано на скорости вращения насосного колеса гидротрансформатора. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса, когда скорость вращения двигателя находится в пределах пороговой скорости вращения скорости вращения насосного колеса гидротрансформатора. Способ включает в себя те случаи, когда такт цилиндра, в течение которого впрыскивается множество импульсов топлива, меняется по мере того, как меняется скорость вращения двигателя. Способ дополнительно содержит те случаи, когда установка момента зажигания меняется во время увеличения скорости вращения двигателя. Способ включает в себя те случаи, когда дроссель является дросселем окна, расположенным ниже по потоку от впускного коллектора.
Способы и системы по фиг. 1-3 и 13-14 также включают в себя систему транспортного средства с гибридным приводом, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для регулирования установки момента впрыска топлива в цилиндр в ответ на требуемую скорость вращения двигателя, которая основана на скорости вращения насосного колеса гидротрансформатора, в то время как насосное колесо гидротрансформатора не присоединено к двигателю механически. Посредством регулирования установки момента впрыска топлива на основании скорости вращения насосного колеса гидротрансформатора, может быть возможным регулировать установку момента впрыска топлива, так чтобы требуемая установка момента впрыска топлива обеспечивалась, когда двигатель достигает скорости вращения насосного колеса гидротрансформатора. Такая работа может улучшать выбросы двигателя.
Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для смыкания муфты расцепления привода на ведущие колеса после того, как скорость вращения двигателя находится в пределах пороговой скорости вращения скорости вращения насосного колеса гидротрансформатора. Система транспортного средства с гибридным приводом включает в себя те случаи, когда двигатель запускается посредством вращения двигателя с помощью стартера, иного чем DISG. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для регулирования установки момента впрыска топлива, чтобы поддерживать по существу постоянное время между установкой момента искрового зажигания, подаваемого в цилиндр, и установкой момента окончания впрыска топлива, подаваемого в цилиндр во время цикла цилиндра, по мере того, как скорость вращения двигателя возрастает во время увеличения скорости вращения двигателя и наряду с впрыском множества импульсов топлива в течение цикла цилиндра. Система транспортного средства с гибридным приводом также дополнительно содержит дополнительные команды для регулирования установки момента впрыска топлива цилиндра под такт цилиндра, которая меняется по мере того, как меняется разность между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя, и регулирования количества топлива, подаваемого в цилиндр в ответ на количество воздуха, проходящего дроссель. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для впрыска одиночного импульса топлива в цилиндр во время такта сжатия цилиндра до первого события сгорания цилиндра после останова двигателя.
Далее, со ссылкой на фиг. 15, показана блок-схема последовательности операций способа для запуска двигателя, когда крутящий момент, выдаваемый посредством электрической машины, может не обеспечивать требуемую величину крутящего момента после переключения передачи трансмиссии. Способ по фиг. 15 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
На 1502, способ 1500 оценивает, требуется или нет или указывается или нет командой включение повышающей передачи трансмиссии. В одном из примеров, команда включения повышающей передачи трансмиссии может определяться посредством контроля состояния управляющей переменной, которая изменяет состояние в ответ на скорость транспортного средства, требуемый крутящий момент и выбранную на данный момент передачу. Если управляющая переменная указывает, что требуется переключение трансмиссии, способ 1500 переходит на 1506. Иначе, способ 1500 переходит на 1504.
На 1504, способ 1500 определяет скорость вращения выходного вала трансмиссии и скорость вращения насосного колеса гидротрансформатора для следующего предстоящего переключения передачи на основании требуемого крутящего момента. В одном из примеров, требуемый крутящий момент, выдаваемый посредством педали акселератора, текущая выбранная передача трансмиссии и скорость транспортного средства являются основой для определения выходной скорости вращения трансмиссии и скорости вращения насосного колеса для следующего включения повышающей передачи трансмиссии. В частности, выходная скорость вращения трансмиссии и следующая передача могут определяться по текущей выбранной передаче и скорости транспортного средства, на которой планируется, что трансмиссия должна переключаться с повышением передачи на следующую передачу с требуемым уровнем крутящего момента двигателя. План переключения передач может определяться опытным путем и сохраняться в памяти, который выдает, какая передача выбирается при данной скорости транспортного средства на требуемом уровне крутящего момента. Скорость транспортного средства может экстраполироваться на будущее время на основании данной скорости транспортного средства и скорости изменения или углового коэффициента скорости транспортного средства согласно уравнению y=mx+b, где y - планируемая скорость транспортного средства, m - угловой коэффициент скорости транспортного средства, а b - смещение скорости транспортного средства. Подобным образом, требуемая скорость вращения насосного колеса может экстраполироваться на будущее время. По мере того, как время экстраполяции увеличивается (например, данный момент времени плюс 0,2 секунды, и при условии увеличения скорости транспортного средства и/или требуемого крутящего момента) от данного момента времени, план переключений может давать команду переключения с повышением передачи на более высокую передачу (например, с 1ой передачи на 2ую передачу) в качестве переменных, которые индексируют изменение плана переключений. Экстраполированное время, когда происходит переключение трансмиссии (например, планируемое время переключения), а также новое передаточное число, экстраполированная скорость транспортного средства и экстраполированный требуемый крутящий момент сохраняются в памяти, когда выбранная передача трансмиссии изменяется согласно плану переключений. Скорость вращения выходного вала трансмиссии определяется по новой передаче (например, передачи переключения с повышением передачи), какого-нибудь передаточного отношения ведущего моста и скорости транспортного средства. Скорость вращения насосного колеса трансмиссии может предсказываться по скорости вращения DISG, поскольку DISG механически присоединен к насосному колесу. Способ 1500 переходит на 1506 после того, как определены скорость вращения насосного колеса трансмиссии и частота на выходном валу трансмиссии.
На 1506, способ 1500 определяет скорости вращения трансмиссии (например, скорость вращения насосного колеса и скорость вращения выходного вала) и передаточные отношения для потребления крутящего момента на следующей передаче переключения с повышением передачи трансмиссии. В одном из примеров, способ 1500 определяет скорость вращения выходного вала трансмиссии на основании следующих уравнений:
OSS=OSS_when_commanded+OSS_rateofchange*time_to_shift;
Commanded_gear=gearfn (vs, dsd_tor);
TSS_after_upshift=OSS*Commanded _gear;
Где OSS - скорость вращения выходного вала трансмиссии, OSS_when_commanded - скорость вращения выходного вала трансмиссии, когда дана команда включения повышающей передачи, time_to_shift - время, которое занимает переключение, Commanded_gear - активная передача после включения повышающей передачи, gearfn - функция, которая возвращает командную передачу, vs - скорость транспортного средства, dsd_tor - требуемый крутящий момент на входном валу трансмиссии, а TSS_after_upshift - скорость вращения выходного вала трансмиссии после переключения. Функция fn хранит определенные опытным путем передачи, которыми оперирует трансмиссия. Способ 1500 переходит на 1508 после того, как определены скорости вращения трансмиссии и передаточное отношение после переключения.
На 1508, способ 1500 определяет требуемый крутящий момента на выходном валу трансмиссии и крутящий момент на валу турбины трансмиссии после переключения. В одном из примеров, способ 1500 определяет крутящий момент на выходном валу трансмиссии и крутящий момент на валу турбины на основании следующих уравнений:
OUTq_dsd=outfn (accel_pedal, TSS_after_upshift);
Turq_dsd=OUTq_dsd*mult+offset;
Где OUTq_dsd - требуемый крутящий момент на выходном валу трансмиссии, outfn - функция, которая возвращает требуемый крутящий момент на выходном валу трансмиссии, accel_pedal - положение педали акселератора, которое дает требуемый крутящий момент, TSS_after_upshift - скорость вращения выходного вала трансмиссии после включения повышающей передачи, Turq_dsd - требуемый крутящий момент на валу турбины трансмиссии, mult и offset - определенные опытным путем параметры, хранимые в функциях, которые индексируются посредством командной передачи, температурой трансмиссионного масла и частотой вращения выходного вала трансмиссии. Способ 1500 переходит на 1510 после того, как определены требуемый крутящий момент на выходном валу трансмиссии и крутящий момент на валу турбины трансмиссии вслед за включением повышающей передачи.
На 1510, способ 1500 оценивает, будет или нет муфта гидротрансформатора (TCC) размыкаться после включения повышающей передачи. В одном из примеров, способ 1500 оценивает, будет или нет TCC размыкаться после включения повышающей передачи на основании определенного опытным путем плана переключений, который хранится в памяти. Например, на основании данной передачи, следующей планируемой передачи и требуемого крутящего момента, план переключения передач может планировать замкнутый гидротрансформатор. Если способ 1500 делает вывод, что TCC будет размыкаться после включения повышающей передачи, ответом является да, и способ 1500 переходит на 1512. Иначе, ответом является нет, и способ 1500 переходит на 1514.
На 1512, способ 1500 определяет требуемый крутящий момент насосного колеса гидротрансформатора. В одном из примеров, требуемый крутящий момент насосного колеса гидротрансформатора извлекается из таблицы, хранимой в памяти. Таблица содержит в себе определенные опытным путем значения крутящего момента насосного колеса гидротрансформатора, которые индексируются посредством скорости вращения выходного вала трансмиссии после включения повышающей передачи и требуемого крутящего момента на валу турбины. Способ 1500 переходит на 1516 после того, как определен крутящий момент насосного колеса.
На 1514, способ 1500 регулирует требуемый крутящий момент насосного колеса гидротрансформатора на требуемый крутящий момент турбины гидротрансформатора, поскольку TCC находится в блокированном состоянии. Способ 1500 переходит на 1516 после того, как определен требуемый крутящий момент насосного колеса гидротрансформатора.
На 1516, способ 1500 оценивает, потребует или нет требуемый крутящий момент насосного колеса гидротрансформатора после включения повышающей передачи трансмиссии, чтобы двигатель был сжигающим топливно-воздушную смесь. В одном из примеров, способ 1500 сравнивает величину крутящего момента, которую способен обеспечивать DISG при данном состоянии заряда аккумуляторной батареи, с требуемым крутящим моментом насосного колеса гидротрансформатора. Если требуемый крутящий момент насосного колеса гидротрансформатора больше, чем или в пределах пороговой величины крутящего момента несущей способности по крутящему моменту DISG, ответом является да, и способ 1500 переходит на 1520. Иначе, ответом является нет, и способ 1500 переходит на 1518.
На 1518, способ 1500 может предоставлять двигателю возможность останавливать вращение на основании данных условий эксплуатации, или способ 1500 может предоставлять двигателю возможность продолжать сжигать топливно-воздушную смесь. В одном из примеров, в тех случаях, когда двигатель достиг прогретых условий эксплуатации, двигатель останавливает вращение, поскольку требуемый крутящий момент насосного колеса гидротрансформатора не требует работы двигателя. Двигатель может продолжать осуществлять сгорание, когда двигатель не достиг прогретых условий эксплуатации. Способ 1500 переходит на выход после того, как вращение двигателя разрешено или запрещено на основании условий эксплуатации, не связанных с переключением трансмиссии.
На 1520, способ 1500 оценивает, следует или нет запускать двигатель до включения повышающей передачи трансмиссии. Двигатель может запускаться до того, как регулируются состояния муфт трансмиссии (например, не учитывая муфту 236 расцепления привода на ведущие колеса), так что крутящий момент двигателя может передаваться на колеса транспортного средства в конце переключения передачи с повышением передачи. В качестве альтернативы, двигатель может запускаться во время включения повышающей передачи в момент времени, когда одна или более муфт трансмиссии являются изменяющими рабочее состояние. В одном из примеров, двигатель может запускаться до того, как начинается включение повышающей передачи двигателя, и до того, как муфты трансмиссии начинают изменять состояние, когда ожидается, что займет более длительное время, чтобы двигатель выработал положительный крутящий момент, чем время, ожидаемое для переключения передач. Если способ 1500 делает вывод, что желательно запустить двигатель до включения повышающей передачи трансмиссии, способ 1500 переходит на 1522. Иначе, способ 1500 переходит на 1526.
На 1522, способ 1500 запускает двигатель и вводит в зацепление муфту расцепления привода на ведущие колеса. Двигатель может запускаться посредством вращения двигателя с помощью стартерного электродвигателя, который имеет более низкую выходную мощность, чем DISG, или посредством проворачивания коленчатого вала двигателя с помощью DISG. Кроме того, переключение трансмиссии может задерживаться до тех пор, пока скорость вращения двигателя не является синхронным с частотой вращения DISG или насосного колеса. Задерживание переключения трансмиссии может снижать возмущения крутящего момента привода на ведущие колеса, которые могут возникать, если крутящий момент двигателя возрастает до того, как выбегающая муфта полностью отпущена. Способ 1500 переходит на 1524 после того, как запущен двигатель и отпущена муфта расцепления привода на ведущие колеса.
На 1524, способ 1500 включает повышающую передачу трансмиссии после того, как введена в зацепление муфта расцепления привода на ведущие колеса. Трансмиссия может переключаться с повышением передачи посредством прикладывания и/или отпускания давления в отношении одной или более муфт, которые оказывают влияние на передачу крутящего момента через трансмиссию. Способ 1500 осуществляет выход после того, как переключена трансмиссия.
На 1526, способ 1500 запрещает останов двигателя, если для останова вращения двигателя присутствуют иные условия, чем предстоящее включение повышающей передачи трансмиссии. Другими словами, если бы двигателю давалась команда останавливаться, но в течение включения повышающей передачи трансмиссии, то остановка вращения трансмиссии двигателем запрещается. Дополнительно, двигатель может запускаться в момент времени после того, как началось включение повышающей передачи (например, во время отпускания выбегающей муфты (фазы крутящего момента) или во время прижатия набегающей муфты (инерционной фазы)), чтобы обеспечивать дополнительный крутящий момент в привод на ведущие колеса для удовлетворения запроса крутящего момента. Крутящий момент двигателя и DISG может регулироваться для обеспечения требуемой величины крутящего момента насосного колеса гидротрансформатора. Способ 1500 переходит на выход после того, как запрещен останов двигателя, или после того, как двигатель запущен после того, как начинается включение повышающей передачи трансмиссии.
Таким образом, способ 1500 может предсказывать переключение трансмиссии и требуемый крутящий момент насосного колеса гидротрансформатора, чтобы определять, когда следует смыкать муфту расцепления привода на ведущие колеса и запускать двигатель. Способ 1500 может предоставлять крутящему моменту двигателя возможность плавно объединяться с крутящим моментом DISG, чтобы обеспечивать плавный разгон во время переключения трансмиссии.
Далее, со ссылкой на фиг. 16, показан график примерной последовательности для определения, когда следует запускать двигатель, согласно способу по фиг. 15. Последовательность по фиг. 16 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 16 представляет собой требуемый крутящий момент привода на ведущие колеса в зависимости от времени. Требуемый крутящий момент привода на ведущие колеса может быть требуемым крутящим моментом насосного колеса гидротрансформатора, требуемым крутящим моментом турбины гидротрансформатора, требуемым крутящим моментом колес или другим крутящим моментом привода на ведущие колеса. Требуемый крутящий момент привода на ведущие колеса может определяться по положению педали акселератора или другого устройства ввода. Сплошная кривая 1602 представляет требуемый крутящий момент привода на ведущие колеса. Пунктирная кривая 1604 представляет прогнозируемый требуемый крутящий момент привода на ведущие колеса (например, требуемый крутящий момент привода на ведущие колеса после переключения передачи трансмиссии). Ось Y представляет требуемый крутящий момент привода на ведущие колеса, и требуемый крутящий момент привода на ведущие колеса возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 1606 представляет предельное значение крутящего момента, которое может подаваться в привод на ведущие колеса посредством DISG.
Второй график сверху по фиг. 16 представляет собой передачу трансмиссии в зависимости от времени. Ось Y представляет передачу трансмиссии, и специфичные передачи трансмиссии указаны вдоль оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Сплошная кривая 1608 представляет фактическую передачу трансмиссии. Пунктирная кривая 1610 представляет прогнозируемую или будущую передачу трансмиссии.
Третий график сверху по фиг. 16 представляет собой требуемое состояние двигателя в отсутствие условий переключения передачи трансмиссии в зависимости от времени. Ось Y представляет собой требуемое состояние двигателя, и требуемое состояние двигателя является включенным для верхних уровней кривой и отключенным для нижних уровней кривой. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 16 представляет собой требуемое состояние двигателя, основанное на всех условиях, в зависимости от времени. Ось Y представляет собой требуемое состояние двигателя, и требуемое состояние двигателя является включенным для верхних уровней кривой и отключенным для нижних уровней кривой. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 16 представляет собой состояние двигателя в зависимости от времени. Ось Y представляет собой состояние двигателя, и состояние двигателя является включенным для верхних уровней кривой и отключенным для нижних уровней кривой. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T21 времени, требуемый крутящий момент привода на ведущие колеса больше, чем величина крутящего момента, который может обеспечиваться посредством DISG в привод на ведущие колеса. Трансмиссия находится на 5ой передаче, а требуемое состояние двигателя и требуемое состояние двигателя в отсутствие условий переключения передачи оба находятся на верхних уровнях, указывая, что двигателю требуется быть работающим. Состояние двигателя находится на верхнем уровне, указывая, что двигатель является работающим.
Между моментом T21 времени и моментом T22 времени, требуемый крутящий момент привода на ведущие колеса уменьшается в ответ на уменьшение водительского входного сигнала (не показан). Трансмиссия переключается с понижением передачи с 5ой на 2ую передачу, и прогнозируемая передача трансмиссии указывает существующую или фактическую передачу трансмиссии. Требуемое состояние двигателя в отсутствие условий переключения передачи и требуемое состояние двигателя остаются на верхних уровнях.
В момент T22 времени, требуемое состояние трансмиссии в отсутствие условий переключения передачи переходит на нижний уровень в ответ на скорость вращения транспортного средства и требуемый крутящий момент привода на ведущие колеса, чтобы указывать, что двигатель может быть остановлен, но по причине условий переключения передачи в ответ на условия эксплуатации двигателя (например, нажатые тормоза, не нажатую педаль акселератора, и скорость вращения транспортного средства, меньшее, чем пороговая скорость вращения). Требуемое состояние двигателя также переходит на нижний уровень, чтобы указывать, что следует останавливать двигатель, в ответ на условия эксплуатации, включающие в себя прогнозируемую передачу трансмиссии. Двигатель останавливается в ответ на требуемое состояние двигателя.
Между моментом T22 времени и моментом T23 времени, требуемый крутящий момент привода на ведущие колеса выравнивается, а затем, возрастает. Прогнозируемая передача трансмиссии возрастает с 2ой передачи до 3ей передачи по мере того, как возрастает крутящий момент привода на ведущие колеса. Текущая передача трансмиссии удерживается на 2ой передаче. Двигатель остается остановленным, пока требуемое состояние двигателя и требуемое состояние двигателя в отсутствие условий переключения передачи остаются на нижнем уровне.
В момент T23 времени, требуемое состояние двигателя переходит на верхний уровень в ответ на прогнозируемый требуемый крутящий момент привода на ведущие колеса, повышающийся после смещения на уровень, больший чем 1606. Двигатель запускается в ответ на переход требуемого состояния двигателя. Требуемое состояние двигателя в отсутствие условий переключения передачи остается на нижнем уровне, чтобы указывать, что двигатель оставался бы отключенным, если бы не увеличение требуемого крутящего момента привода на ведущие колеса, ожидаемого после переключения трансмиссии.
Между моментом T23 времени и моментом T24 времени, требуемый крутящий момент привода на ведущие колеса увеличивается, а затем уменьшается, в ответ на уменьшенный запрос водителя (не показано). Требуемый крутящий момент привода на ведущие колеса возрастает до уровня, меньшего чем 1606 и держится около уровня 1606. Трансмиссия переключается с понижением передачи на 3ью передачу с 5ой передачи. Требуемое состояние двигателя и требуемое состояние двигателя в отсутствие условий переключения передачи остаются на верхних уровнях, так что двигатель остается включенным.
В момент T24 времени, требуемое состояние двигателя в отсутствие условий для переключения передачи переходит на нижний уровень, чтобы указывать, что двигатель может быть остановлен, в ответ на требуемый крутящий момент привода на ведущие колеса, скорость транспортного средства (не показана) и нажатый тормоз (не показан). Однако, требуемое состояние двигателя остается на верхнем уровне в ответ на прогнозируемый требуемый крутящий момент привода на ведущие колеса, возрастающий до уровня, большего чем 1606, в качестве прогноза для переключения трансмиссии на 4ую передачу. Следовательно, останов двигателя запрещен. Такие условия могут присутствовать, когда транспортное средство является движущимся, и когда водитель отпускает (например, освобождает или уменьшает) команду педали акселератора.
Между моментом T24 времени и моментом T25 времени, требуемый крутящий момент привода на ведущие колеса возрастает, а затем, убывает. Трансмиссия переключает передачи между 3ей и 5ой передачами в ответ на крутящий момент требования водителя, скорость транспортного средства (не показана) и состояние тормозов (не показано). Требуемое состояние двигателя в отсутствие условий переключения передачи и требуемое состояние двигателя остаются на верхних уровнях в ответ на требуемый крутящий момент привода на ведущие колеса.
В момент T25 времени, требуемый крутящий момент привода на ведущие колеса уменьшается до меньшего, чем уровень 1606, в ответ на более низкий запрос водителя (не показано). Требуемое состояние двигателя в отсутствие условий переключения передачи и требуемое состояние двигателя переходят на нижний уровень, чтобы указывать, что двигатель должен быть остановлен, в ответ на требуемый крутящий момент привода на ведущие колеса, состояние тормозной педали (не показано) и скорость транспортного средства (не показана). Двигатель останавливается в ответ на требуемое состояние двигателя.
Между моментом T25 времени и моментом T26 времени, требуемый крутящий момент привода на ведущие колеса постепенно возрастает, и прогнозируемая передача трансмиссии повышается с 2ой передачи на 3ью передачу в ответ на повышение требуемого крутящего момента привода на ведущие колеса. Требуемое состояние двигателя и требуемое состояние двигателя в отсутствие условий переключения передачи остаются на нижнем уровне, и двигатель остается отключенным.
В момент T26 времени, требуемое состояние двигателя переходит на верхний уровень, и двигатель запускается в ответ на увеличение требуемого крутящего момента и прогнозируемую передачу трансмиссии. Требуемое состояние двигателя в отсутствие условий переключения передачи остается на низком уровне, указывая, что двигатель не запускался бы, если бы не прогнозируемый требуемый крутящий момент привода на ведущие колеса, являющийся большим, чем 1606 после прогнозируемого переключения передачи трансмиссии. Посредством запуска двигателя до фактического переключения передачи, может быть возможным обеспечивать требуемый крутящий момент привода на ведущие колеса после переключения.
Таким образом, двигатель может запускаться до переключения передачи, чтобы обеспечивать требуемый крутящий момент привода на ведущие колеса после переключения передачи. Кроме того, способ прогнозирует переключение, так что двигатель может запускаться до того, как требуемый крутящий момент привода на ведущие колеса запрошен фактически. Ранний запуск двигателя может предоставлять двигателю возможность добиваться условий, где он может выводить крутящий момент для удовлетворения требуемого крутящего момента привода на ведущие колеса.
Способы и системы по фиг. 1-3 и 15-16 предусматривают способ запуска двигателя, содержащий: предсказывание требуемого крутящего момента после включения повышающей передачи трансмиссии; и начинание вращения остановленного двигателя, если предсказанный требуемый крутящий момент после включения повышающей передачи трансмиссии больше, чем пороговая величина крутящего момента. Способ включает в себя те случаи, когда требуемый крутящий момент является крутящим моментом насосного колеса гидротрансформатора, и где предсказание требуемого крутящего момента и пускового вращения происходит во время условий, где встроенный в привод на ведущие колеса стартер/генератор является выдающим крутящий момент на колеса, и где трансмиссия находится на передаче переднего хода, и где транспортное средство является перемещающимся. Способ включает в себя те случаи, когда требуемый крутящий момент предсказывается на основании заданного плана переключения трансмиссии.
В некоторых примерах, способ включает в себя те случаи, когда вращение двигателя начинается посредством муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса расцепляется перед вращением двигателя. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса расположена в приводе на ведущие колеса транспортного средства с гибридным приводом между маховиком двойной массы и встроенным в привод на ведущие колеса стартером/генератором. Способ включает в себя те случаи, когда двигатель вращается в ответ на предсказанный требуемый крутящий момент привода на ведущие колеса перед тем, как переключается трансмиссия.
Способы и системы по фиг. 1-3 и 15-16 предусматривают запуск двигателя, содержащий: выдачу крутящего момента в привод на ведущие колеса транспортного средства через электрическую машину; планирование включения повышающей передачи трансмиссии; и начинание вращения остановленного двигателя в ответ на планируемое включение повышающей передачи трансмиссии, если требуемый крутящий момент после планируемого включения повышающей передачи трансмиссии больше, чем пороговая величина крутящего момента, и где требуемый крутящий момент основан на крутящем моменте встроенного в привод на ведущие колеса стартера/генератора после установки момента включения повышающей передачи трансмиссии по зацеплению муфты трансмиссии относительно запуска двигателя. Способ включает в себя те случаи, когда электрическая машина является встроенным в привод на ведущие колеса стартером/генератором (DISG), и где DISG расположен в приводе на ведущие колеса транспортного средства с гибридным приводом в местоположении между муфтой расцепления привода на ведущие колеса и трансмиссией.
В некоторых примерах, способ включает в себя те случаи, когда DISG выдает крутящий момент для запуска вращения остановленного двигателя посредством по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса. Способ дополнительно содержит включение повышающей передачи трансмиссии после начала вращения двигателя. Способ также включает в себя те случаи, когда трансмиссия является трансмиссией с двойным промежуточным валом - двойным сцеплением. Способ включает в себя те случаи, когда трансмиссия является автоматической трансмиссией. Способ дополнительно содержит предоставление двигателю возможность останавливать вращение, если требуемый крутящий момент после установки момента включения повышающей передачи трансмиссии по зацеплению муфты трансмиссии относительно запуска двигателя меньше, чем пороговая величина крутящего момента.
Способы и системы по фиг. 1-3 и 15-16 предусматривают систему транспортного средства с гибридным приводом, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор, включающий в себя первую сторону, механически присоединенную к второй стороне муфты расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для запуска двигателя посредством смыкания муфты расцепления привода на ведущие колеса в ответ на требуемый крутящий момент после планируемого включения повышающей передачи трансмиссии, двигатель запускается до того, как трансмиссия переключается в ответ на планируемое включение повышающей передачи трансмиссии. Такая система может улучшать время реакции привода на ведущие колеса.
В одном из примеров, система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для запрещения остановки вращения двигателя, если двигатель является вращающимся до планируемого включения повышающей передачи трансмиссии. Система транспортного средства с гибридным приводом включает в себя те случаи, когда двигатель запускается посредством вращения двигателя с помощью встроенного в привод на ведущие колеса стартера/генератора в ответ на смыкание муфты расцепления привода на ведущие колеса. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для включения повышающей передачи трансмиссии после того, как запущен двигатель. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для предоставления двигателю возможности останавливать вращение в ответ на требуемый крутящий момент после планируемого включения повышающей передачи трансмиссии. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для задержки запуска двигателя до тех пор, пока планируемое включение повышающей передачи трансмиссии планируется на время, меньшее, чем пороговое время.
Далее, со ссылкой на фиг. 17, показана блок-схема последовательности операций способа для запуска двигателя, чтобы снижать крутящий момент на входном валу трансмиссии во время переключения трансмиссии. Способ по фиг. 17 может храниться в качестве выполняемых команд в постоянной памяти в системе, показанной на фиг. 1-3. Способ по фиг. 17 может уменьшать амплитуду и/или количество раз, которое производятся изменения крутящего момента в отношении DISG, во время работы транспортного средства, чтобы ограничивать крутящий момент, прикладываемый к трансмиссии во время переключения трансмиссии.
На 1702, способ 1700 оценивает, требуются или нет перезапуск двигателя и включение повышающей передачи трансмиссии. Перезапуск двигателя может запрашиваться, например, когда увеличивается запрошенный крутящий момент привода на ведущие колеса, или когда водитель отпускает тормозную педаль. Включение повышающей передачи трансмиссии, например, может запрашиваться в ответ на скорость транспортного средства и потребление крутящего момента привода на ведущие колеса. В одном из примеров, план переключения трансмиссии определяется опытным путем и сохраняется в памяти, чтобы индексироваться скоростью транспортного средства и потреблением крутящего момента привода на ведущие колеса. Если способ 1700 определяет, что запрошены включение повышающей передачи трансмиссии и запуск двигателя, способ 1700 переходит на 1704. Иначе, способ 1700 переходит на выход.
На 1704, способ 1700 оценивает, имеется или нет в распоряжении DISG. Способ 1700 может оценивать, имеется или нет в распоряжении DISG, на основании флажкового признака состояния DISG, хранимого в памяти. В качестве альтернативы, способ 1700 может оценивать, имеется или нет в распоряжении DISG, на основании условий эксплуатации, таких как состояние заряда аккумуляторной батареи. Например, если SOC меньше, чем пороговый уровень, DISG может не быть имеющимся в распоряжении. В еще одном примере, DISG не быть имеющимся в распоряжении, если температура DISG является большей, чем пороговое значение. Если способ 1700 делает вывод, что DISG имеется в распоряжении, ответом является да, и способ 1700 переходит на 1712. Иначе, ответом является нет, и способ 1700 переходит на 1706.
На 1706, способ 1700 отпускает выбегающую муфту с планируемой скоростью, выбегающая муфта является более низкой передачей во время включения повышающей передачи. Например, выбегающая муфта отпускает муфту 2ой передачи во время переключения с повышением передачи с 2ой на 3ю передачу. Скорость отпускания муфты может определяться опытным путем и сохраняться в памяти, так что, когда происходит включение повышающей передачи, выбегающая муфта может отпускаться на скорости, которая хранится в памяти, выбегающая муфта может отпускаться посредством снижения давления масла, подаваемого в выбегающую муфту. Способ 1700 переходит на 1708 после того, как отпущена выбегающая муфта.
На 1708, способ 1700 начинает применять набегающую муфту для включения более высокой передачи через заданное время после того, как начато отпускание выбегающей муфты. Набегающая муфта может применяться посредством повышения давления масла, подаваемого на набегающую муфту. Заданное время может определяться опытным путем и сохраняться в памяти для использования во время включения повышающей передачи. В одном из примеров, набегающая муфта применяется в момент времени, который снижает вероятность износа выбегающей муфты посредством повышения скорости наружной стороны выбегающей муфты. Способ 1700 переходит на 1710 после того, как инициировано прижатие набегающей муфты.
На 1710, способ 1700 применяет или начинает смыкать муфту расцепления привода на ведущие колеса с регулируемой скоростью, чтобы снижать крутящий момент на входном валу трансмиссии. В частности, двигатель прикладывает нагрузку к входной стороне гидротрансформатора посредством смыкания муфты расцепления привода на ведущие колеса, с тем чтобы снижать скорость вращения у скорости вращения насосного колеса гидротрансформатора. Таким образом, величина крутящего момента, передаваемого через гидротрансформатор на входной вал трансмиссии, снижается. В одном из примеров, скорость муфты расцепления привода на ведущие колеса регулируется на основании скорости вращения насосного колеса гидротрансформатора, в то время как смыкается муфта расцепления привода на ведущие колеса. Например, давление прижатия муфты расцепления привода на ведущие колеса повышается до тех пор, пока скорость вращения насосного колеса гидротрансформатора не снижается до пороговой величины, и затем, давление прижатия муфты расцепления дополнительно не увеличивается. Поскольку муфта расцепления привода на ведущие колеса передает крутящий момент с входной стороны трансмиссии на двигатель, величина крутящего момента, передаваемого на двигатель из трансмиссии, ограничивается на основании скорости вращения насосного колеса. Способ 1700 переходит на 1722 после того, как давление прижатия муфты расцепления привода на ведущие колеса повышено, и муфта расцепления привода на ведущие колеса по меньшей мере частично сомкнута.
На 1712, способ 1700 отпускает выбегающую муфту с планируемой скоростью. Отпускание выбегающей муфты предоставляет более высокой передаче возможность применяться без передачи крутящего момента, через две разные передачи. Скорость отпускания выбегающей муфты может определяться опытным путем и сохраняться в памяти для извлечения во время включения повышающей передачи. Способ 1700 переходит на 1714 после того, как инициировано отпускание выбегающей муфты.
На 1714, способ 1700 увеличивает крутящий момент на выходном валу DISG, чтобы повышать крутящий момент, подаваемый на насосное колесо гидротрансформатора. В одном из примеров, крутящий момент DISG повышается на величину крутящего момента, используемого для разгона двигателя до требуемой скорости вращения двигателя. Крутящий момент DISG может повышаться посредством повышения величины тока, подаваемого на DISG. В других примерах, крутящий момент на выходном валу DISG может уменьшаться, чтобы снижать крутящий момент на выходном валу трансмиссии. Способ 1700 переходит на 1716 после того, как повышен крутящий момент DISG.
На 1716, способ 1700 начинает применять набегающую муфту для включения более высокой передачи через заданное время после того, как начато отпускание выбегающей муфты. Набегающая муфта может применяться посредством повышения давления масла, подаваемого на набегающую муфту. Заданное время может определяться опытным путем и сохраняться в памяти для использования во время включения повышающей передачи. В одном из примеров, набегающая муфта применяется в момент времени, который снижает вероятность износа выбегающей муфты посредством повышения скорости наружной стороны выбегающей муфты. Способ 1700 переходит на 1718 после того, как инициировано прижатие набегающей муфты.
На 1718, способ 1700 применяет или начинает смыкать муфту расцепления привода на ведущие колеса с регулируемой скоростью, чтобы снижать крутящий момент на входном валу трансмиссии и разгонять двигатель до требуемой скорости вращения проворачивания коленчатого вала. В частности, двигатель прикладывает нагрузку к входной стороне гидротрансформатора посредством смыкания муфты расцепления привода на ведущие колеса, с тем чтобы снижать скорость вращения насосного колеса гидротрансформатора. Давление прижатия муфты расцепления привода на ведущие колеса может модулироваться для регулирования передачи крутящего момента через муфту расцепления привода на ведущие колеса. Кроме того, муфта расцепления привода на ведущие колеса может применяться в любой момент времени в течение инерционной фазы переключения, когда смыкается набегающая муфта.
В одном из примеров, скорость прижатия муфты расцепления привода на ведущие колеса может регулироваться на основании скорости вращения насосного колеса гидротрансформатора, в то время как смыкается муфта расцепления привода на ведущие колеса. Поскольку муфта расцепления привода на ведущие колеса передает крутящий момент с входной стороны трансмиссии на двигатель, величина крутящего момента, передаваемого на двигатель, ограничивается на основании скорости вращения насосного колеса. В еще одном примере, передаточная функция муфты расцепления привода на ведущие колеса, которая устанавливает отношение крутящего момента, передаваемого на основании величины крутящего момента на входном валу, подаваемого на муфту расцепления привода на ведущие колеса и давлением прижатия муфты расцепления привода на ведущие колеса, умноженным на крутящий момент DISG, чтобы определять величину крутящего момента, передаваемого на двигатель для запуска двигателя. Скорость прижатия муфты расцепления привода на ведущие колеса может регулироваться, чтобы требуемый крутящий момент проворачивания коленчатого вала выдавался на двигатель через DISG и муфту расцепления привода на ведущие колеса.
В еще одном другом примере, скорость прижатия муфты расцепления привода на ведущие колеса может регулироваться на основании скорости вращения DISG и требуемой скорости увеличения скорости вращения двигателя. Например, скорость прижатия муфты расцепления привода на ведущие колеса может извлекаться из определенной опытным путем таблицы, которая выводит скорость прижатия муфты расцепления привода на ведущие колеса, когда индексируется посредством скорости вращения DISG и требуемого разгона двигателя. Способ 1700 переходит на 1720 после того, как инициировано прижатие муфты расцепления привода на ведущие колеса.
На 1720, способ 1700 регулирует крутящий момент DISG, чтобы обеспечивать требуемый крутящий момент на входном валу трансмиссии через насосное колесо гидротрансформатора во время или после инерционной фазы включения повышающей передачи трансмиссии. Если масса двигателя относительно высока, выходная мощность DISG может увеличиваться, так чтобы крутящий момент на входном валу трансмиссии не снижался больше, чем требуется. Если масса двигателя относительно низка, крутящий момент DISG может снижаться, так что крутящий момент на входном валу трансмиссии уменьшается на требуемую величину. Крутящий момент DISG может регулироваться посредством увеличения или уменьшения тока, подаваемого на DISG. Способ 1700 переходит на 1722 после того, как отрегулирован крутящий момент DISG.
На 1722, способ 1700 запускает двигатель, когда скорость вращения двигателя достигает пороговой скорости вращения, подавая топливо и искровое зажигание на двигатель. В некоторых примерах, стартер, иной чем DISG, может вводиться в зацепление с двигателем, чтобы обеспечивать крутящий момент, дополнительный к крутящему моменту, выдаваемому муфтой расцепления привода на ведущие колеса на двигатель, когда двигатель запускается, так что может достигаться требуемая скорость вращения проворачивания коленчатого вала двигателя. Способ 1700 переходит на выход после того, как запущен двигатель.
Таким образом, крутящий момент на выходном валу трансмиссии может уменьшаться в течение инерционной фазы переключения, так что возмущения крутящего момента привода на ведущие колеса могут уменьшаться. Запуск двигателя посредством смыкания муфты расцепления привода на ведущие колеса снижает крутящий момент на входном валу трансмиссии, так что крутящий момент на выходном валу трансмиссии может уменьшаться во время инерционной фазы переключения.
Далее, со ссылкой на фиг. 18, показана примерная последовательность запуска двигателя во время переключения передачи трансмиссии согласно способу по фиг. 17. Последовательность по фиг. 18 может быть предусмотрена системой по фиг. 1-3. Пунктирные кривые эквивалентны сплошным кривым, когда пунктирные кривые невидимы.
Первый график сверху по фиг. 18 представляет собой крутящий момент на входном валу трансмиссии в зависимости от времени. Крутящий момент на входном валу трансмиссии равен крутящему моменту турбины гидротрансформатора трансмиссии. Ось Y представляет крутящий момент на входном валу трансмиссии, и крутящий момент на входном валу трансмиссии возрастает в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Сплошная линия 1802 представляет крутящий момент на входном валу трансмиссии без запуска двигателя посредством смыкания муфты расцепления привода на ведущие колеса или обеспечения снижения крутящего момента на входном валу трансмиссии. Пунктирная кривая 1804 представляет крутящий момент на входном валу трансмиссии при запуске двигателя посредством смыкания муфты расцепления привода на ведущие колеса и переключения на более высокую передачу.
Второй график сверху по фиг. 18 представляет собой крутящий момент на выходном валу трансмиссии в зависимости от времени. Ось Y представляет крутящий момент на выходном валу трансмиссии, и крутящий момент на выходном валу трансмиссии возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Сплошная линия 1806 представляет крутящий момент на выходном валу трансмиссии без запуска двигателя посредством смыкания муфты расцепления привода на ведущие колеса или обеспечения снижения крутящего момента на входном валу трансмиссии. Пунктирная кривая 1808 представляет крутящий момент на выходном валу трансмиссии при запуске двигателя посредством смыкания муфты расцепления привода на ведущие колеса и переключения на более высокую передачу.
Третий график сверху по фиг. 18 представляет состояние муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет состояние муфты расцепления привода на ведущие колеса, где муфта расцепления является разомкнутой возле оси X и сомкнутой возле верхней части оси Y. Величина крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса, повышается по мере того, как смыкается муфта расцепления привода на ведущие колеса. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 18 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 18 представляет собой крутящий момент DISG в зависимости от времени. Ось Y представляет крутящий момент DISG, и крутящий момент DISG увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T27 времени, трансмиссия не переключается, а двигатель остановлен. DISG выводит крутящий момент в привод на ведущие колеса, а крутящие моменты на входном валу и выходном валу трансмиссии постоянны.
В момент T28 времени, трансмиссия начинает переключаться в ответ на план переключения трансмиссии, требуемый крутящий момент привода на ведущие колеса (не показан) и скорость транспортного средства (не показана). Переключение начинается отпусканием выбегающей муфты. Например, во время переключения с повышением передачи с 2ой передачи на 3ью передачу, муфта 2ой передачи (выбегающая муфта) разжимается до того, как применена 3ья передача (набегающая муфта). Крутящий момент на входном валу трансмиссии удерживается постоянным, хотя он может повышаться в некоторых примерах для лучшего поддержания крутящего момента на выходном валу трансмиссии. Крутящий момент на выходном валу трансмиссии начинает снижаться в ответ на разжимание выбегающей муфты. Муфта расцепления привода на ведущие колеса показана являющейся открытой, и двигатель остановлен. Крутящий момент DISG показан поддерживаемым на постоянном значении.
В момент T29 времени, инерционная фаза начинается применением набегающей муфты в ответ на разжимание выбегающей муфты. Муфта расцепления привода на ведущие колеса начинает смыкаться по мере того, как набегающая муфта применяется и начинает смыкаться. Крутящий момент на входном валу трансмиссии также показан уменьшающимся в ответ на смыкание муфты расцепления привода на ведущие колеса, поскольку некоторый крутящий момент DISG передается посредством муфты расцепления привода на ведущие колеса для вращения двигателя. Скорость вращения двигателя начинает возрастать в ответ на прикладывание крутящего момента привода на ведущие колеса к двигателю. Крутящий момент DISG показан на постоянном уровне.
Между моментом T29 времени и моментом T30 времени, состояние муфты расцепления привода на ведущие колеса показано модулируемым для регулирования величины крутящего момента привода на ведущие колеса, прикладываемого к двигателю. Давление прижатия муфты расцепления привода на ведущие колеса может модулироваться в ответ на скорость вращения двигателя и/или скорость вращения выходного вала трансмиссии, с тем чтобы уменьшаться возмущения крутящего момента привода на ведущие колеса во время переключения и запуска двигателя. Искровое зажигание и топливо (не показаны) также подаются на двигатель, так что скорость вращения двигателя приближается к скорости вращения DISG. Крутящий момент на выходном валу трансмиссии постепенно возрастает, когда муфта расцепления привода на ведущие колеса применяется для перезапуска двигателя, как указано пунктирной линией 1808. Если муфта расцепления привода на ведущие колеса не применяется во время инерционной фазы, крутящий момент на выходном валу трансмиссии возрастает в ответ на изменение передаточного отношения. Таким образом, применение муфты расцепления привода на ведущие колеса во время инерционной фазы может уменьшать возмущения крутящего момента привода на ведущие колеса.
В момент T30 времени, инерционная фаза переключения трансмиссии завершается, так как набегающая муфта (не показана) полностью прижата, как указано крутящим моментом на выходном валу трансмиссии, сходящимся к постоянному значению. Крутящий момент DISG также показан увеличивающимся в ответ на завершение переключения, так что может возобновляться разгон транспортного средства.
Таким образом, может уменьшаться возмущение кутящего момента привода на ведущие колеса во время переключения. Кроме того, энергия привода на ведущие колеса может применяться для запуска двигателя, так что DISG может прикладывать меньший крутящий момент для запуска двигателя.
Способы и системы по фиг. 1-3 и 17-18 предусматривают переключение трансмиссии, содержащее: присоединение двигателя к трансмиссии в ответ на запрос включить повышающую передачу трансмиссии. Таким образом, крутящий момент на входном валу трансмиссии может уменьшаться для регулирования крутящего момента на выходном валу трансмиссии во время переключения. Способ включает в себя те случаи, когда двигатель не присоединен к трансмиссии перед запросом включить повышающую передачу трансмиссии, где трансмиссия находится в движущемся транспортном средстве и на передней передаче привода, и где транспортное средство продолжает перемещаться, и где трансмиссия подвергается включению повышающей передачи на более высокую передачу. Способ включает в себя те случаи, когда двигатель присоединяется к трансмиссии посредством муфты расцепления привода на ведущие колеса, расположенной в приводе на ведущие колеса между двигателем и гидротрансформатором.
В некоторых примерах, способ включает в себя те случаи, когда двигатель присоединяется к трансмиссии во время инерционной фазы включения повышающей передачи. Способ включает в себя те случаи, когда двигатель присоединяется к трансмиссии после того, как отпускание выбегающей муфты инициировано во время включения повышающей передачи. Способ дополнительно содержит запуск двигателя, когда скорость вращения двигателя достигает пороговой скорости вращения. Способ включает в себя те случаи, когда трансмиссия является автоматической трансмиссией, и где крутящий момент на входном валу в автоматическую трансмиссию уменьшается во время включения повышающей передачи.
Способы и системы по фиг. 1-3 и 17-18 также предусматривают переключение трансмиссии, содержащее: уменьшение крутящего момента на входном валу в трансмиссию в ответ на запрос включения повышающей передачи трансмиссии посредством избирательного присоединения двигателя к входному валу трансмиссии, двигатель не присоединен к трансмиссии до запроса включения повышающей передачи трансмиссии. Способ включает в себя те случаи, когда двигатель присоединяется к трансмиссии через муфту расцепления привода на ведущие колеса. Способ дополнительно содержит гидротрансформатор в приводе на ведущие колеса, расположенный между двигателем и трансмиссией. Способ дополнительно содержит увеличение или уменьшение крутящего момента встроенного в привод на ведущие колеса стартера/генератора во время включения повышающей передачи. Способ включает в себя те случаи, когда крутящий момент из встроенного в привод на ведущие колеса стартера/генератора повышается, чтобы удерживать скорость вращения насосного колеса гидротрансформатора большей, чем пороговая скорость вращения. Способ включает в себя те случаи, когда вращение двигателя остановлено до запроса включения повышающей передачи трансмиссии.
Способы и системы по фиг. 1-3 и 17-18 также предусматривают систему транспортного средства с гибридным приводом, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса, и вторую сторону; трансмиссию, присоединенную к DISG; и контроллер, содержащий постоянные команды, выполняемые для инициирования запроса переключения трансмиссии и присоединения двигателя к трансмиссии в ответ на запрос переключения трансмиссии.
В некоторых примерах, система транспортного средства с гибридным приводом дополнительно содержит гидротрансформатор, расположенный в приводе на ведущие колеса между трансмиссией и DISG. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для запуска двигателя. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для присоединения двигателя к трансмиссии через муфту расцепления привода на ведущие колеса. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для увеличения крутящего момента DISG в ответ на запрос включения повышающей передачи трансмиссии. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для уменьшения крутящего момента DISG в ответ на запрос включения повышающей передачи трансмиссии. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные команды для разгона двигателя до требуемой скорости вращения проворачивания коленчатого вала.
Далее, со ссылкой на фиг. 19, показана блок-схема последовательности операций способа для улучшения реакции привода на ведущие колеса транспортного средства, когда привод на ведущие колеса включает в себя маховик двойной массы. Способ по фиг. 19 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг.1-3.
На 1902, способ 1900 определяет условия эксплуатации. Условия эксплуатации могут включать в себя, но не в качестве ограничения, скорость вращения двигателя, входная и выходная скорости вращения DMF, запрошенный крутящий момент привода на ведущие колеса, крутящий момент DISG, состояние муфты расцепления привода на ведущие колеса и крутящий момент двигателя. Способ 1900 переходит на 1904 после того, как определены условия эксплуатации.
На 1904, способ 1900 определяет скорость вращения и/или положение расположенной выше по потоку или стороны двигателя от DMF. В альтернативных примерах, может определяться крутящий момент на расположенной выше по потоку стороне DMF. Скорость вращения и/или положение могут определяться по датчику положения. Крутящий момент может определяться посредством датчика крутящего момента. Способ 1900 переходит на 1906 после того, как определены скорость вращения и/или положение расположенной выше по потоку стороны DMF.
На 1906, способ 1900 определяет скорость вращения и/или положение ниже по потоку или на стороне муфты расцепления привода на ведущие колеса от DMF. В качестве альтернативы, может определяться крутящий момент на расположенной ниже по потоку стороне DMF. Скорость вращения и/или положение на расположенной ниже по потоку стороне DMF могут определяться посредством датчика положения. Крутящий момент на расположенной ниже по потоку стороне DMF могут определяться посредством датчика крутящего момента. Способ 1900 переходит на 1908 после того, как определены скорость вращения и/или положение ниже по потоку от DMF.
На 1908, способ 1900 определяет разность скоростей вращения, положений или крутящих моментов между расположенной выше по потоку стороной DMF и расположенной ниже по потоку стороны DMF. В одном из примеров, сторона муфты расцепления привода на ведущие колеса DMF является стороной требуемой скорости вращения и/или положения DMF. Скорость вращения и/или положение на стороне двигателя DMF вычитаются из скорости вращения и/или положения стороны двигателя DMF, чтобы обеспечивать ошибку скорости вращения и/или положения DMF на DMF. В качестве альтернативы, крутящий момент на стороне двигателя DMF может вычитаться из крутящего момента на расположенной выше по потоку стороне DMF, чтобы обеспечивать ошибку крутящего момента. В некоторых примерах, разность скоростей вращения/положений между первой стороной DMF и второй стороной DMF во время работы привода на ведущие колеса сравнивается с положением первой стороны DMF и положением второй стороны DMF, когда крутящий момент не передается через DMF.
В еще одном примере, быстрое преобразование Фурье сигналов скорости вращения выше по потоку и ниже по потоку DMF может выполняться для определения амплитуды или модуля и частоты любых колебаний скорости вращения на сторонах выше по потоку и ниже по потоку от DMF. Способ 1900 переходит на 1910 после того, как определены ошибка скорости вращения на DMF и/или частоты и амплитуды скорости вращения выше по потоку и ниже по потоку от DMF.
На 1910, способ 1900 оценивает, являются ли ошибка скорость вращения и/или положения, либо амплитуды и частоты на сторонах DMF выше по потоку и ниже по потоку, большими, чем пороговые уровни. Если так, способ 1900 переходит на 1912. Иначе, способ 1900 переходит на выход.
На 1912, способ 1900 оценивает, находятся или нет условия эксплуатации привода на ведущие колеса в пределах первого рабочего окна. Например, является ли ошибка скорости вращения выше по потоку и ниже по потоку DMF большей, чем первый пороговый уровень. В других примерах, разность крутящих моментов или разность положений на DMF могут быть основой определения, находятся или нет условия эксплуатации привода на ведущие колеса в пределах первого рабочего окна. Кроме того, в других примерах, частоты или амплитуды частот сравниваются с пороговыми значениями. Если условия эксплуатации привода на ведущие колеса находятся в пределах первого рабочего окна, способ 1900 переходит на 1914. Иначе, способ 1900 переходит на 1916.
На 1914 способа 1900, способ 1900 осуществляет модуляцию муфты гидротрансформатора (TCC) трансмиссии, чтобы демпфировать колебания скорости вращения и/или крутящего момента на DMF. TCC модулируется посредством изменения рабочего цикла командного сигнала TCC. В других примерах, регулируется частота TCC. Рабочий цикл команды управления TCC уменьшается для увеличения проскальзывания на муфте гидротрансформатора, тем самым, увеличивая демпфирование DMF. Однако, если TCC является проскальзывающей на пороговую величину, когда разность скорости вращения/положения выявляется на DMF, TCC даваться команда в блокированное положение посредством увеличения команды рабочего цикла TCC. Величина регулирования TCC может быть основана на ошибке между требуемым значением и фактическим значением. Например, рабочий цикл TCC может регулироваться на основании разности между частотами вращения выше по потоку и ниже по потоку DMF. Способ 1900 переходит на выход после того, как отрегулирована TCC.
На 1916, способ 1900 оценивает, находятся или нет условия эксплуатации привода на ведущие колеса в пределах второго рабочего окна. Например, является ли ошибка скорости вращения выше по потоку и ниже по потоку DMF большей, чем второй пороговый уровень. Если условия эксплуатации привода на ведущие колеса находятся в пределах второго рабочего окна, способ 1900 переходит на 1918. Иначе, способ 1900 переходит на 1920.
На 1918, способ 1900 регулирует проскальзывание муфты расцепления привода на ведущие колеса, чтобы отрегулировать демпфирование на DMF. В одном из примеров, величина проскальзывания на муфте расцепления привода на ведущие колеса увеличивается для увеличения демпфирования на DMF. Однако, если муфта расцепления привода на ведущие колеса является проскальзывающей на пороговую величину, когда выявляется ошибка скорости вращения/положения, муфта расцепления привода на ведущие колеса полностью смыкается, чтобы придать жесткость приводу на ведущие колеса. Сила или давление прижатия муфты расцепления привода на ведущие колеса может регулироваться на основании разности между частотами вращения выше по потоку и ниже по потоку DMF или разностей между требуемым и фактическим значениями обсужденных ранее переменных, таких как амплитуда частоты привода на ведущие колеса. Способ 1900 переходит на выход после того, как отрегулированы сила или давление прижатия муфты расцепления привода на ведущие колеса. Способ 1900 переходит на выход после того, как отрегулирована муфта расцепления привода на ведущие колеса.
На 1920, способ 1900 оценивает, находятся или нет условия привода на ведущие колеса в пределах третьего рабочего окна. Например, является ли ошибка скорости вращения выше по потоку и ниже по потоку DMF большей, чем третий пороговый уровень. Если так, способ 1900 переходит на 1922. Иначе, способ 1900 переходит на 1924.
На 1922, способ 1900 регулирует крутящий момент DISG, чтобы скомпенсировать разность скорости вращения/положения или крутящего момента на DMF. В одном из примеров, выходной крутящий момент DISG увеличивается, если скорость вращения на стороне двигателя DMF больше, чем скорость вращения на стороне муфты расцепления привода на ведущие колеса DMF. Выходной крутящий момент с DISG уменьшается, если скорость вращения на стороне двигателя DMF меньше, чем скорость вращения на стороне муфты расцепления привода на ведущие колеса DMF. В одном из примеров, ошибка скорости вращения, положения или крутящего момента DMF вводится в функцию или таблицу, которая выводит текущий запрос для регулирования крутящего момента DISG. Кроме того, крутящий момент DISG увеличивается, когда знак сигнала ошибки отрицателен. Крутящий момент DISG уменьшается, когда знак сигнала ошибки положителен. Если определена нежелательная частота или амплитуда, крутящий момент, подаваемый на DISG, может регулироваться по направлению к нахождению на 180 градусов сдвинутым по фазе от ошибки сигнала скорости вращения, чтобы демпфировать нежелательные колебания скорости вращения. Способ 1900 переходит на выход после того, как отрегулирован крутящий момент DISG.
На 1924, способ 1900 увеличивает частоту прижатия муфты расцепления привода на ведущие колеса, если муфта расцепления привода на ведущие колеса не сомкнута. Муфта расцепления привода на ведущие колеса может смыкаться, а давление прижатия повышаться посредством увеличения рабочего цикла сигнала управления муфтой расцепления привода на ведущие колеса. Способ 1900 переходит на выход после того, как муфта расцепления привода на ведущие колеса сомкнута.
В других примерах, проскальзывание муфты расцепления привода на ведущие колеса, крутящий момент TCC и DISG могут регулироваться одновременно для регулирования демпфирования на DMF. Таким образом, способ 1900 может регулировать один или более исполнительных механизмов для увеличения демпфирования или придания жесткости приводу на ведущие колеса, когда перепад или ошибка скорости вращения/положения, частоты или крутящего момента на DMF является большей, чем пороговый уровень.
Далее, со ссылкой на фиг. 20, показана примерная последовательность для компенсации DMF в приводе на ведущие колеса согласно способу по фиг. 19. Последовательность по фиг. 20 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 20 представляет собой скорость транспортного средства в зависимости от времени. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 20 представляет силу прижатия муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет силу на муфте расцепления привода на ведущие колеса, и сила прижатия на муфте расцепления привода на ведущие колеса возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 20 представляет скорость вращения DMF в зависимости от времени. Ось Y представляет скорость вращения DMF, и скорость вращения DMF увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 20 представляет собой силу прижатия TCC в зависимости от времени. Ось Y представляет силу прижатия TCC, и сила прижатия TCC возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 20 представляет собой крутящий момент DISG в зависимости от времени. Ось Y представляет крутящий момент DISG, и крутящий момент DISG увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T31 времени, скорость транспортного средства повышается, и муфта расцепления привода на ведущие колеса полностью прижимается, что указано силой прижатия муфты расцепления привода на ведущие колеса, находящейся на повышенном уровне. Скорость вращения DMF также находится на более высоком уровне, и муфта TCC сомкнута, как указано силой прижатия TCC, находящейся на повышенном уровне. Крутящий момент DISG также находится на более высоком уровне, указывая, что DISG является подающим крутящий момент в привод на ведущие колеса транспортного средства.
В момент T32 времени, скорость транспортного средства достигает нуля, и муфта расцепления привода на ведущие колеса размыкается, чтобы предоставлять двигателю возможность останавливаться в ответ на низкое потребление крутящего момента привода на ведущие колеса (не показано). Скорость вращения DMF также уменьшается до нуля, по мере того, как скорость вращения двигателя обращается в ноль. Сила прижатия TCC снижается, так что присутствует проскальзывание на гидротрансформаторе. Крутящий момент DISG также уменьшается, но DISG продолжает обеспечивать крутящий момент в привод на ведущие колеса, так что давление масла может поддерживаться в трансмиссии. Другими словами, крутящий момент DISG передается через гидротрансформатор, в то время как транспортное средство и двигатель остановлены. Крутящий момент DISG вращает масляный насос трансмиссии, чтобы поддерживать давление трансмиссионного масла.
В момент T33 времени, крутящий момент DISG повышается в ответ на увеличение потребного крутящего момента, запрошенного водителем (не показан). Скорость транспортного средства начинает возрастать в ответ на повышенный крутящий момент DISG, и муфта расцепления привода на ведущие колеса начинает смыкаться в ответ на увеличение потребного крутящего момента. Скорость вращения DMF возрастает по мере того, как сила прижатия муфты расцепления привода на ведущие колеса увеличивается для смыкания муфты расцепления привода на ведущие колеса. Фактическая скорость вращения DMF начинает колебаться, и ошибка между требуемой частотой вращения DMF и фактической частотой вращения DMF или между требуемой амплитудой колебаний привода на ведущие колеса и фактическими колебаниями привода на ведущие колеса возрастает до уровня, большего, чем первое пороговое значение. Сила прижатия TCC дополнительно уменьшается, чтобы уменьшать ошибку колебаний и/или скорости вращения DMF.
Между моментом T33 времени и моментом T34 времени, двигатель и DISG подают крутящий момент в привод на ведущие колеса транспортного средства. Кроме того, муфта расцепления привода на ведущие колеса остается полностью сомкнутой, и скорость вращения DMF меняется по мере того, как меняется скорость вращения двигателя.
В момент T34 времени, скорость транспортного средства достигает нуля, и муфта расцепления привода на ведущие колеса размыкается, чтобы предоставлять двигателю возможность останавливаться в ответ на низкое потребление крутящего момента привода на ведущие колеса (не показано). Скорость вращения DMF также уменьшается до нуля, по мере того, как скорость вращения двигателя обращается в ноль. Сила прижатия TCC вновь снижается, так что присутствует проскальзывание на гидротрансформаторе. Крутящий момент DISG также уменьшается.
В момент T35 времени, крутящий момент DISG повышается в ответ на увеличение потребного крутящего момента, запрошенного водителем (не показан). Скорость транспортного средства начинает возрастать в ответ на повышенный крутящий момент DISG, и муфта расцепления привода на ведущие колеса начинает смыкаться в ответ на увеличение потребного крутящего момента. Скорость вращения DMF возрастает по мере того, как сила прижатия муфты расцепления привода на ведущие колеса увеличивается для смыкания муфты расцепления привода на ведущие колеса. Фактическая скорость вращения DMF начинает колебаться с большей амплитудой, чем в момент T33 времени, и ошибка между требуемой частотой вращения DMF и фактической частотой вращения DMF или между требуемой амплитудой колебаний привода на ведущие колеса и фактическими колебаниями привода на ведущие колеса возрастает до уровня, большего, чем второе пороговое значение. Сила прижатия муфты расцепления привода на ведущие колеса уменьшается до более низкой ошибки колебаний и/или скорости вращения DMF.
Между моментом T35 времени и моментом T36 времени, двигатель и DISG подают крутящий момент в привод на ведущие колеса транспортного средства. Кроме того, муфта расцепления привода на ведущие колеса остается полностью сомкнутой, и скорость вращения DMF меняется по мере того, как меняется скорость вращения двигателя.
В момент T36 времени, скорость транспортного средства достигает нуля, и муфта расцепления привода на ведущие колеса размыкается, чтобы предоставлять двигателю возможность останавливаться в ответ на низкое потребление крутящего момента привода на ведущие колеса (не показано). Скорость вращения DMF также уменьшается до нуля, по мере того, как скорость вращения двигателя обращается в ноль. Сила прижатия TCC вновь снижается, так что присутствует проскальзывание на гидротрансформаторе. Крутящий момент DISG также уменьшается.
В момент T37 времени, крутящий момент DISG повышается в ответ на увеличение потребного крутящего момента, запрошенного водителем (не показан). Скорость транспортного средства начинает возрастать в ответ на повышенный крутящий момент DISG, и муфта расцепления привода на ведущие колеса начинает смыкаться в ответ на увеличение потребного крутящего момента. Скорость вращения DMF возрастает по мере того, как сила прижатия муфты расцепления привода на ведущие колеса увеличивается для смыкания муфты расцепления привода на ведущие колеса. Фактическая скорость вращения DMF начинает колебаться с большей амплитудой, чем в момент T35 времени, и ошибка между требуемой частотой вращения DMF и фактической частотой вращения DMF или между требуемой амплитудой колебаний привода на ведущие колеса и фактическими колебаниями привода на ведущие колеса возрастает до уровня, большего, чем третье пороговое значение. Крутящий момент на выходном валу DISG регулируется (например, модулируется), чтобы демпфировать ошибки скорости вращения, частоты или крутящего момента DMF. Дополнительно, скорость применения увеличивающейся силы прижатия муфты расцепления привода на ведущие колеса может повышаться для придания жесткости приводу на ведущие колеса.
Таким образом, разные исполнительные механизмы могут регулироваться для борьбы с возмущениями крутящего момента привода на ведущие колеса, которые могут присутствовать на DMF. Разные исполнительные механизмы могут регулироваться согласно возмущению (например, ошибке скорости вращения, ошибке крутящего момента, колебаниям), измеренному на DMF.
Способы и системы по фиг. 1-3 и 19-20 предусматривают регулирование работы привода на ведущие колеса транспортного средства с гибридным приводом, содержащую: регулирование исполнительного механизма в ответ на разность скоростей вращения или крутящих моментов на маховике двойной массы (DMF), расположенном в приводе на ведущие колеса транспортного средства с гибридным приводом между двигателем и муфтой расцепления привода на ведущие колеса, где DMF является компонентом привода на ведущие колеса между двигателем и муфтой расцепления привода на ведущие колеса. Таким образом, могут снижаться NVH привода на ведущие колеса.
В одном из примеров, способ включает в себя те случаи, когда исполнительный механизм является муфтой гидротрансформатора. Способ включает в себя те случаи, когда исполнительный механизм является встроенным в привод на ведущие колеса стартером/генератором. Способ включает в себя те случаи, когда исполнительный механизм муфтой расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда разность скорости вращения на DMF определяется по датчику положения двигателя и датчикам положений, расположенным в приводе на ведущие колеса транспортного средства между DMF и муфтой расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса расположена в приводе на ведущие колеса транспортного средства с гибридным приводом между DMF встроенным в привод на ведущие колеса стартером/генератором. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса избирательно отсоединяет двигатель от встроенного в привод на ведущие колеса стартера/генератора и трансмиссии.
Способы и системы по фиг. 1-3 и 19-20 также предусматривают регулирование работы привода на ведущие колеса транспортного средства с гибридным приводом, содержащую: ввод в зацепление муфты расцепления привода на ведущие колеса, чтобы вращать двигатель посредством электрической машины; и регулирование исполнительного механизма в ответ на разность скоростей вращения или крутящих моментов на маховике двойной массы (DMF), расположенном в приводе на ведущие колеса транспортного средства с гибридным приводом между двигателем и муфтой расцепления привода на ведущие колеса, где DMF является компонентом привода на ведущие колеса между двигателем и муфтой расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда электрическая машина является встроенным в привод на ведущие колеса стартером/генератором (DISG), расположенным в приводе на ведущие колеса транспортного средства с гибридным приводом в местоположении между муфтой расцепления привода на ведущие колеса и трансмиссией. Способ включает в себя те случаи, когда исполнительный механизм является DISG. Способ включает в себя те случаи, когда DMF передает крутящий момент двигателя на автоматическую трансмиссию или трансмиссию с двойным промежуточным валом - двойным сцеплением. Способ включает в себя те случаи, когда исполнительный механизм является другим исполнительным механизмом для других условий. Способ включает в себя те случаи, когда частотная составляющая сигнала скорости вращения двигателя является основой для регулирования исполнительного механизма. Способ включает в себя те случаи, когда частотная составляющая определяется посредством быстрого преобразования Фурье (БПФ, FFT).
Способы и системы по фиг. 1-3 и 19-20 предусматривают систему транспортного средства с гибридным приводом, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для регулирования исполнительного механизма в ответ на разность на DMF.
В одном из примеров, система транспортного средства с гибридным приводом, дополнительно содержит трансмиссию, присоединенную к второй стороне DISG. Система транспортного средства с гибридным приводом включает в себя те случаи, когда разность является разностью положений между первой стороной DMF и второй стороной DMF по сравнению с положением первой стороной DMF и положением второй стороны DMF, когда никакой крутящий момент не передается через DMF. Система транспортного средства с гибридным приводом включает в себя те случаи, когда исполнительный механизм является DISG. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные выполняемые команды для увеличения проскальзывания на муфте расцепления привода на ведущие колеса, когда разность скорости вращения между первой стороной и второй стороной DMF превышает пороговую скорость вращения. Система транспортного средства с гибридным приводом дополнительно содержит дополнительные выполняемые команды для увеличения проскальзывания на муфте гидротрансформатора, когда разность скорости вращения между первой стороной и второй стороной DMF превышает пороговую скорость вращения.
Способы и системы по фиг. 1-3 и 19-20 также предусматривают регулирование работы привода на ведущие колеса транспортного средства, содержащую: регулирование исполнительного механизма в ответ на зацепление муфты расцепления привода на ведущие колеса, чтобы демпфировать колебание маховика двойной массы (DMF), расположенного между двигателем и муфтой расцепления привода на ведущие колеса, и где DMF находится между двигателем и муфтой расцепления привода на ведущие колеса.
Далее, со ссылкой на фиг. 21, показан способ для подавления возмущений крутящего момента привода на ведущие колеса, связанных с прижатием муфты расцепления привода на ведущие колеса и ее передаточной функцией. Способ по фиг. 21 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12, показанного на фиг. 1-3.
На 2102, способ 2100 определяет условия эксплуатации. Условия эксплуатации могут включать в себя, но не в качестве ограничения, скорость вращения двигателя, входную и выходную скорости вращения DMF, запрошенный крутящий момент привода на ведущие колеса, крутящий момент DISG, скорость вращения DISG, состояние муфты расцепления привода на ведущие колеса, скорость вращения двигателя, скорость вращения насосного колеса гидротрансформатора, скорость вращения турбины гидротрансформатора и крутящий момент двигателя. Способ 2100 переходит на 2104 после того, как определены условия эксплуатации.
На 2104, способ 2100 оценивает, разомкнута или нет муфта расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса может определяться разомкнутой на основании переменной, хранимой в памяти или на основании разности между скоростью вращения двигателя и частотой вращения DISG. Если способ 2100 делает вывод, что муфта расцепления привода на ведущие колеса не разомкнута, ответом является нет, и способ 2100 переходит на выход. Если способ 2100 делает вывод, что муфта расцепления привода на ведущие колеса разомкнута, ответом является да, и способ 2100 переходит на 2106.
На 2106, способ 2100 оценивает, запрошен или нет запуск двигателя посредством DISG, или должен ли крутящий момент двигателя быть приложен к приводу на ведущие колеса. Запуск двигателя может запрашиваться, когда требуемый крутящий момент привода на ведущие колеса больше, чем пороговый крутящий момент. Подобным образом, запрос обеспечивать крутящий момент двигателя в привод на ведущие колеса может присутствовать, когда требуемый крутящий момент привода на ведущие колеса больше, чем пороговый крутящий момент. Если способ 2100 делает вывод, что запрошен запуск двигателя посредством DISG, или должен ли крутящий момент двигателя прикладываться к приводу на ведущие колеса, ответом является да, и способ 2100 переходит на 2108. Иначе, ответом является нет, и способ 2100 переходит на выход.
На 2108, способ 2100 оценивает, присутствует или нет датчик крутящего момента в приводе на ведущие колеса транспортного средства в местоположениях, описанных на фиг. 1-3. Если датчик крутящего момента оценен присутствующим, ответом является да, и способ 2100 переходит на 2110. Иначе, ответом является нет, и способ 2100 переходит на 2130.
На 2110, способ 2100 определяет разность между требуемым крутящим моментом на входном валу привода на ведущие колеса и фактическим крутящим моментом на входном валу привода на ведущие колеса в выбранном местоположении вдоль привода на ведущие колеса. В некоторых примерах, выбранное местоположение для крутящего момента на входном валу привода на ведущие колеса может находиться на насосном колесе гидротрансформатора, в местоположении между муфтой расцепления привода на ведущие колеса и DISG, на выходном валу трансмиссии, на турбине гидротрансформатора, на входе пусковой муфты или в другом местоположении привода на ведущие колеса. Фактический или измеренный крутящий момент на входном валу привода на ведущие колеса в выбранном местоположении привода на ведущие колеса определяется по датчику крутящего момента. Требуемый крутящий момент на входном валу привода на ведущие колеса может определяться по положению педали акселератора или другому источнику. Разность крутящего момента является требуемым крутящим моментом на входном валу привода на ведущие колеса минус фактический крутящий момент на входном валу привода на ведущие колеса.
В качестве альтернативы, если датчик крутящего момента размещен в приводе на ведущие колеса между DISG и муфтой расцепления привода на ведущие колеса, крутящий момент, измеренный датчиком крутящего момента, может прибавляться к команде крутящего момента DISG, так чтобы DISG производил дополнительный крутящий момент для запуска двигателя, так чтобы трансмиссия снабжалась требуемым крутящим моментом на входном валу трансмиссии. Способ 2100 переходит на 2112.
На 2112, способ 2100 регулирует ток, подаваемый на DISG, так что требуемый крутящий момент на входном валу привода на ведущие колеса выдавался в привод на ведущие колеса в предписанном местоположении, даже если ухудшена передаточная функция муфты расцепления привода на ведущие колеса. Если датчик крутящего момента привода на ведущие колеса используется для осуществления обратной связи по крутящему моменту на входном валу привода на ведущие колеса, крутящий момент DISG повышается, когда фактический крутящий момент на входном валу привода на ведущие колеса меньше, чем требуемый крутящий момент на входном валу привода на ведущие колеса. Крутящий момент DISG уменьшается, когда фактический крутящий момент на входном валу привода на ведущем валу больше, чем требуемый крутящий момент на входном валу привода на ведущие колеса. Таким образом, крутящий момент DISG регулируется в ответ на разность между требуемым крутящим моментом на входном валу привода на ведущие колеса и фактическим или измеренным крутящим моментом на входном валу привода на ведущие колеса.
Если датчик крутящего момента привода на ведущие колеса реализован в качестве упреждающего датчика, выходной сигнал датчика крутящего момента комбинируется с требуемым крутящим моментом DISG, чтобы обеспечивать требуемый крутящий момент DISG на выходе трансмиссии или в другом специфичном местоположении привода на ведущие колеса. Таким образом, датчик крутящего момента может использоваться в качестве устройства обратной связи или прямой связи. Способ 2100 переходит на 2114 после того, как отрегулирован крутящий момент DISG.
На 2114, способ 2100 повышает давление муфты расцепления привода на ведущие колеса, чтобы смыкать муфту расцепления привода на ведущие колеса, так чтобы двигатель мог подвергаться проворачиванию коленчатого вала посредством DISG или привода на ведущие колеса. Давление муфты расцепления привода на ведущие колеса регулируется посредством индексирования функции, которая выдает команду или силу прижатия расцепления привода на ведущие колеса на основании требуемого крутящего момента для передачи через муфту расцепления привода на ведущие колеса. Искра и топливо также могут подаваться на 2114 после того, как двигатель находится на заданной скорости вращения или в положении. Способ 2100 переходит на 2118 после того, как начинает увеличиваться давление муфты расцепления привода на ведущие колеса.
На 2116, способ 2100 оценивает, запустился или нет двигатель. В одном из примеров, двигатель может оцениваться запущенным, когда скорость вращения двигателя превышает пороговую скорость вращения. Если способ 2100 делает вывод, что двигатель запустился, ответом является да, и способ 2100 переходит на 2118. Иначе, ответом является нет, и способ 2100 возвращается на 2110.
На 2118, способ 2100 оценивает, является или нет скорость вращения двигателя разогнавшимся до или равным скорости вращения DISG. Скорость вращения двигателя может оцениваться равным скорости вращения DISG, когда датчик скорости вращения двигателя и датчик скорости вращения DISG считывают по существу одинаковую скорость вращения (например, +20 оборотов в минуту). Если способ 2100 делает вывод, что скорость вращения двигателя равно скорости вращения DISG, ответом является да, и способ 2100 переходит на 2122. Иначе, ответом является нет, и способ 2100 переходит на 2120.
На 2120, способ 2100 регулирует скорость вращения двигателя на скорость вращения DISG. Скорость вращения двигателя может регулироваться на скорость вращения DISG посредством регулирования крутящего момента двигателя с помощью дросселя и впрыска топлива. Кроме того, скорость вращения двигателя может регулироваться для достижения скорости вращения DISG посредством полного смыкания муфты расцепления привода на ведущие колеса. Однако, полное смыкание муфты расцепления привода на ведущие колеса до того, как скорость вращения двигателя соответствует DISG, может увеличивать возмущения крутящего момента привода на ведущие колеса. Способ 2100 возвращается на 2118 после того, как двигатель отрегулирован, чтобы соответствовать скорости вращения DISG.
На 2122, способ 2100 блокирует муфту расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса может блокироваться посредством подачи большего, чем пороговая величина, давления на муфту расцепления привода на ведущие колеса. Способ 2100 переходит на выход после того, как муфта расцепления привода на ведущие колеса блокирована.
На 2130, способ 2100 размыкает муфту гидротрансформатора (TCC). Муфта расцепления привода на ведущие колеса размыкается, так чтобы крутящий момент на насосном колесе гидротрансформатора мог оцениваться на основании условий эксплуатации гидротрансформатора. В качестве альтернативы, крутящий момент турбины гидротрансформатора может оцениваться, если требуется. Способ 2100 переходит на 2132 после того, как TCC разомкнута.
На 2132, способ 2100 переводит DISG в режим управления скоростью вращения из режима регулирования крутящего момента, так что DISG придерживается требуемой скорости вращения. DISG придерживается требуемой скорости вращения, посредством регулирования крутящего момента в отношении DISG, которые основаны на разности между требуемой частотой вращения DISG и фактической частотой вращения DISG. Таким образом, скорость вращения DISG регулируется посредством регулирования крутящего момента DISG в ответ на фактическую или измеренную скорость вращения DISG. Дополнительно, способ 2100 оценивает величину крутящего момента, которую муфта расцепления привода на ведущие колеса подает для запуска двигателя. Требуемая величина крутящего момента для запуска двигателя может определяться опытным путем и сохраняться в качестве передаточной функции в памяти. Требуемая величина крутящего момента для запуска двигателя может передаваться на двигатель через муфту расцепления привода на ведущие колеса посредством индексирования функции, которая описывает передаточную функцию муфты расцепления привода на ведущие колеса. Функция выводит команду приведения в действие муфты расцепления привода на ведущие колеса, выдает требуемый крутящий момент муфты расцепления привода на ведущие колеса. Функция индексируется посредством требуемого крутящего момента муфты расцепления привода на ведущие колеса. Способ 2100 переходит на 2134 после того, как DISG входит в режим управления скоростью вращения из режима регулирования крутящего момента, и определяет величину крутящего момента для подачи на двигатель через муфту расцепления привода на ведущие колеса, так чтобы двигатель мог подвергаться проворачиванию коленчатого вала.
На 2134, способ 2100 дает DISG команду на требуемую скорость вращения, которая является функцией скорости вращения турбины гидротрансформатора и требуемого крутящего момента насосного колеса гидротрансформатора для достижения требуемого крутящего момента насосного колеса гидротрансформатора. Требуемый крутящий момент насосного колеса гидротрансформатора может определяться по входному сигналу акселератора или из контроллера (например, требуемого крутящего момента привода на ведущие колеса). Требуемая скорость вращения DISG определяется посредством индексирования одной или более функций, которые описывают работу гидротрансформатора (например, смотрите фиг. 45-47). В частности, отношение скорости вращения турбины гидротрансформатора к скорости вращения насосного колеса гидротрансформатора умножается на коэффициент несущей способности гидротрансформатора (например, передаточную функцию гидротрансформатора). Результат затем умножается на скорость вращения насосного колеса гидротрансформатора, возведенную в квадрат, чтобы обеспечивать крутящий момент насосного колеса гидротрансформатора.
Таким образом, когда коэффициент несущей способности гидротрансформатора, крутящий момент насосного колеса гидротрансформатора и скорость вращения турбины гидротрансформатора известны, может определяться скорость вращения насосного колеса гидротрансформатора, которая дает крутящий момент насосного колеса гидротрансформатора. Таким образом, передаточная функция гидротрансформатора является основой для обеспечения требуемого крутящего момента насосного колеса гидротрансформатора, когда датчик крутящего момента привода на ведущие колеса не предусмотрен. DISG дается команда на скорость вращения насосного колеса гидротрансформатора, которая может давать требуемый крутящий момент насосного колеса гидротрансформатора, даже если сила прижатия муфты расцепления привода на ведущие колеса, которая дает требуемый крутящий момент проворачивания коленчатого вала двигателя, является неточной. Дополнительно, величина крутящего момента, определенная прикладываемой муфтой расцепления привода на ведущие колеса на 2132, может прибавляться к команде крутящего момента DISG, которая дает требуемую скорость вращения DISG, в режиме управления скоростью вращения. Таким образом, крутящий момент, передаваемый с DISG на двигатель через муфту расцепления привода на ведущие колеса, может прибавляться к команде крутящего момента DISG, так что DISG добивается требуемых скорости вращения и крутящего момента насосного колеса гидротрансформатора, как только прижимается муфта расцепления привода на ведущие колеса. Способ 2100 переходит на 2136 после того, как отрегулирована скорость вращения DISG.
На 2136, способ 2100 повышает давление муфты расцепления привода на ведущие колеса, чтобы смыкать муфту расцепления привода на ведущие колеса, так чтобы двигатель мог подвергаться проворачиванию коленчатого вала посредством DISG или привода на ведущие колеса. Давление муфты расцепления привода на ведущие колеса смыкается для обеспечения требуемой величины крутящего момента для проворачивания коленчатого вала двигателя, как определено на 2132. Искра и топливо привода на ведущие колеса также могут подаваться на 2136 после того, как двигатель находится на заданной скорости вращения или в положении. Способ 2100 переходит на 2138 после того, как начинает увеличиваться давление муфты расцепления привода на ведущие колеса.
На 2138, способ 2100 оценивает, запустился или нет двигатель. В одном из примеров, двигатель может оцениваться запущенным, когда скорость вращения двигателя превышает пороговую скорость вращения. Если способ 2100 делает вывод, что двигатель запустился, ответом является да, и способ 2100 переходит на 2140. Иначе, ответом является нет, и способ 2100 возвращается на 2132.
На 2140, способ 2100 оценивает, является или нет скорость вращения двигателя разогнавшимся до или равным скорости вращения DISG. Скорость вращения двигателя может оцениваться равным скорости вращения DISG, когда датчик скорости вращения двигателя и датчик скорости вращения DISG считывают по существу одинаковую скорость вращения (например, ±20 оборотов в минуту). Если способ 2100 делает вывод, что скорость вращения двигателя равно скорости вращения DISG, ответом является да, и способ 2100 переходит на 2144. Иначе, ответом является нет, и способ 2100 переходит на 2142.
На 2142, способ 2100 регулирует скорость вращения двигателя на скорость вращения DISG. Скорость вращения двигателя может регулироваться на скорость вращения DISG посредством регулирования крутящего момента двигателя с помощью дросселя и впрыска топлива. Кроме того, скорость вращения двигателя может регулироваться для достижения скорости вращения DISG посредством полного смыкания муфты расцепления привода на ведущие колеса. Однако, полное смыкание муфты расцепления привода на ведущие колеса до того, как скорость вращения двигателя соответствует DISG, может увеличивать возмущения крутящего момента привода на ведущие колеса. Способ 2100 возвращается на 2140 после того, как двигатель отрегулирован, чтобы соответствовать скорости вращения DISG.
На 2144, способ 2100 блокирует муфту расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса может блокироваться посредством подачи большего, чем пороговая величина, давления на муфту расцепления привода на ведущие колеса. Способ 2100 переходит на выход после того, как муфта расцепления привода на ведущие колеса блокирована.
Таким образом, передаточная функция гидротрансформатора может быть основой для оценки и выдачи требуемого крутящего момента насосного колеса гидротрансформатора, когда никакого датчика крутящего момента привода на ведущие колеса не присутствует, и если ухудшена передаточная функция крутящего момента муфты расцепления привода на ведущие колеса. С другой стороны, если датчик крутящего момента привода на ведущие колеса имеется в распоряжении, выходной сигнал датчика крутящего момента может быть основой для регулирования крутящего момента DISG, так чтобы требуемый крутящий момент насосного колеса гидротрансформатора мог обеспечиваться, даже если ухудшена передаточная функция крутящего момента муфты расцепления привода на ведущие колеса.
Далее, со ссылкой на фиг. 22, показана примерная последовательность для компенсации передаточной функции муфты расцепления привода на ведущие колеса согласно способу по фиг. 21. Последовательность по фиг. 22 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 22 представляет собой базовое потребление крутящего момента DISG в зависимости от времени. В одном из примеров, базовое потребление крутящего момента DISG является крутящим моментом DISG, который выдается в привод на ведущие колеса без обратной вязи с датчика крутящего момента привода на ведущие колеса или обратной связи по условиям эксплуатации гидротрансформатора. Ось Y представляет базовый крутящий момент DISG, и базовый крутящий момент DISG возрастает в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 22 представляет крутящий момент насосного колеса гидротрансформатора в зависимости от времени. Ось Y представляет крутящий момент насосного колеса гидротрансформатора, и крутящий момент насосного колеса гидротрансформатора возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Сплошная кривая 2202 представляет требуемый крутящий момент насосного колеса гидротрансформатора. Пунктирная кривая 2204 представляет фактический крутящий момент насосного колеса гидротрансформатора. Фактический крутящий момент насосного колеса гидротрансформатора равен требуемому крутящему моменту насосного колеса гидротрансформатора, когда является видимым только требуемый крутящий момент насосного колеса гидротрансформатора.
Третий график сверху по фиг. 22 представляет усилие на муфте расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет силу на муфте расцепления привода на ведущие колеса, и сила на муфте расцепления привода на ведущие колеса возрастает в направлении стрелки оси Y. Муфта расцепления привода на ведущие колеса сомкнута при более высокой силе и разомкнута при более низкой силе. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 22 представляет собой регулирование крутящего момента DISG в зависимости от времени. Увеличение регулирования крутящего момента повышает крутящий момент DISG. Ось Y представляет крутящий момент регулирования DISG, и крутящий момент регулирования DISG возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 22 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T38 времени, крутящий момент DISG находится на верхнем уровне, как и крутящий момент насосного колеса гидротрансформатора. Муфта расцепления привода на ведущие колеса смыкается, и нет регулирования DISG, поскольку фактический крутящий момент насосного колеса гидротрансформатора соответствует требуемому крутящему моменту насосного колеса гидротрансформатора. Скорость вращения двигателя находится на повышенном уровне, чтобы указывать, что двигатель является работающим.
В момент T39 времени, базовый крутящий момент DISG снижается до нуля; однако, в некоторых примерах, базовый крутящий момент DISG может быть большим, чем ноль, чтобы обеспечивать давление трансмиссионного масла. Двигатель останавливается, и крутящий момент насосного колеса гидротрансформатора также снижается до нуля. Муфта расцепления привода на ведущие колеса размыкается, так чтобы двигатель отсоединяется от DISG. Между моментом T39 времени и моментом T40 времени, двигатель и DISG остаются отключенными.
В момент T40 времени, базовый крутящий момент DISG повышается в ответ на увеличивающийся крутящий момент требования водителя (не показан) и в ответ на силу муфты расцепления привода на ведущие колеса, которая может преобразовываться в величину крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса на двигатель. Двигатель также вращается, чтобы запускаться, в ответ на крутящий момент требования водителя. Двигатель вращается посредством увеличения силы прижатия муфты расцепления привода на ведущие колеса в ответ на крутящий момент требования водителя, так чтобы крутящий момент с DISG мог передаваться для вращения двигателя. Крутящий момент DISG, передаваемый на двигатель, оценивается на основании силы на муфте расцепления привода на ведущие колеса. В частности, определенная опытным путем передаточная функция, индексируемая силой на муфте расцепления привода на ведущие колеса, производит крутящий момент муфты расцепления привода на ведущие колеса. Командный крутящий момент DISG является суммой крутящего момента муфты расцепления привода на ведущие колеса и крутящий момент требования водителя. В одном из примеров, крутящий момент требования водителя является требуемым крутящим моментом насосного колеса гидротрансформатора. Если крутящий момент муфты расцепления привода на ведущие колеса переоценен или недооценен, фактический крутящий момент насосного колеса гидротрансформатора отличается от требуемого крутящего момента насосного колеса гидротрансформатора.
В этом примере, фактический крутящий момент насосного колеса гидротрансформатора меньше, чем требуемый крутящий момент насосного колеса гидротрансформатора, в то время как увеличивается сила на муфте расцепления привода на ведущие колеса. Таким образом, крутящий момент муфты расцепления привода на ведущие колеса недооценен, и меньший крутящий момент выдается с DISG на насосное колесо гидротрансформатора. Как результат, крутящий момент DISG увеличивается для коррекции разности между требуемым крутящим моментом насосного колеса гидротрансформатора и фактическим крутящим моментом насосного колеса гидротрансформатора. Возрастание крутящего момента DISG показано на графике регулирования крутящего момента DISG, которая прибавляется к базовому требованию крутящего момента DISG на первом графике и выводится на DISG. Кроме того, в некоторых примерах, оцененная передаточная функция муфты расцепления привода на ведущие колеса регулируется в ответ на регулирование крутящего момента DISG. Например, если крутящий момент DISG повышается на 2 Н∙м, передаточная функция муфты расцепления привода на ведущие колеса регулируется, чтобы отражать, что муфта расцепления привода на ведущие колеса передает дополнительные 2 Н∙м при текущей силе прижатия муфты расцепления привода на ведущие колеса.
Фактический крутящий момент насосного колеса гидротрансформатора может определяться посредством датчика крутящего момента или, в качестве альтернативы, по скорости вращения насосного колеса гидротрансформатора, скорости вращения турбины гидротрансформатора и коэффициенту несущей способности гидротрансформатора, как описано со ссылкой на фиг. 21 и 45-47. Требуемый крутящий момент насосного колеса гидротрансформатора может определяться по положению или требованию контроллера педали акселератора.
В момент T41 времени, двигатель запущен, и двигатель разгоняется до такой же скорости вращения, как DISG. Кроме того, муфта расцепления привода на ведущие колеса смыкается в ответ на скорость вращения двигателя, совпадающее с частотой вращения DISG. Регулирование крутящего момента DISG уменьшается после того, как муфта расцепления привода на ведущие колеса сомкнута, в ответ на фактический крутящий момент насосного колеса гидротрансформатора, являющийся по существу равным (например, + 10 Н∙м) требуемому крутящему моменту насосного колеса гидротрансформатора.
Таким образом, способы и системы по фиг. 1-3 и 21-22 предусматривают приведение в действие привода на ведущие колеса транспортного средства с гибридным приводом, содержащее: размыкание муфты гидротрансформатора в ответ на запрос запуска двигателя; и регулирование скорости вращения встроенного в привод на ведущие колеса стартера/генератора (DISG) в ответ на требуемую скорость вращения насосного колеса гидротрансформатора. Таким образом, может обеспечиваться компенсация муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда регулирование скорости вращения DISG включает в себя регулирование скорости вращения DISG в качестве функции скорости вращения турбины гидротрансформатора и требуемого крутящего момента насосного колеса гидротрансформатора. Способ включает в себя те случаи, когда требуемый крутящий момент насосного колеса гидротрансформатора основан на крутящем моменте требования водителя. Способ включает в себя те случаи, когда скорость вращения DISG регулируется посредством регулирования крутящего момента DISG.
В некоторых примерах, способ дополнительно содержит регулирование крутящего момента DISG в ответ на оцененный крутящий момент муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда оцененный крутящий момент муфты расцепления привода на ведущие колеса основан на силе прижатия муфты расцепления привода на ведущие колеса. Способ дополнительно содержит приведение в действие DISG в режиме управления скоростью вращения при регулировании скорости вращения DISG.
Способы и системы по фиг. 1-3 и 21-22 предусматривают приведение в действие привода на ведущие колеса транспортного средства с гибридным приводом, содержащее: размыкание муфты гидротрансформатора в ответ на запрос запуска двигателя; приведение в действие встроенного в привод на ведущие колеса стартера/генератора (DISG) в режиме управления скоростью вращения; регулирование скорости вращения DISG в ответ на требуемую скорость вращения насосного колеса гидротрансформатора; и запуск двигателя посредством смыкания муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса частично смыкается в ответ на силу прижатия муфты расцепления привода на ведущие колеса, и где крутящий момент муфты расцепления привода на ведущие колеса оценивается на основании силы прижатия муфты расцепления привода на ведущие колеса.
В некоторых примерах, способ включает в себя те случаи, когда крутящий момент DISG регулируется в ответ на оцененный крутящий момент муфты расцепления привода на ведущие колеса. Способ дополнительно содержит настойку скорости вращения DISG в ответ на требуемый крутящий момент насосного колеса гидротрансформатора. Способ включает в себя те случаи, когда скорость вращения DISG регулируется одновременно со смыканием муфты расцепления привода на ведущие колеса. Способ дополнительно содержит регулирование передаточной функции муфты расцепления привода на ведущие колеса в ответ на выходной крутящий момент регулирования DISG во время смыкания муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда запуск двигателя посредством смыкания муфты расцепления привода на ведущие колеса включает в себя частичное смыкание муфты расцепления привода на ведущие колеса, а затем, полное смыкание муфты расцепления привода на ведущие колеса, так чтобы входная скорость вращения муфты расцепления привода на ведущие колеса соответствовала выходной скорости вращения муфты расцепления привода на ведущие колеса, когда скорость вращения двигателя по существу равно скорости вращения DISG.
Способы и системы по фиг. 1-3 и 21-22 предусматривают систему привода на ведущие колеса транспортного средства с гибридным приводом, содержащую: гидротрансформатор; встроенный в привод на ведущие колеса стартер/генератор (DISG); двигатель; муфту расцепления привода на ведущие колеса, расположенную в приводе на ведущие колеса между двигателем и DISG; и контроллер, содержащий выполняемые постоянные команды для приведения в действие DISG в режиме управления скоростью вращения и выдачи требуемого крутящего момента насосного колеса гидротрансформатора посредством регулирования скорости вращения DISG в ответ на скорость вращения турбины гидротрансформатора и требуемый крутящий момент насосного колеса гидротрансформатора.
В некоторых примерах, система привода на ведущие колеса транспортного средства с гибридным приводом содержит дополнительные выполняемые постоянные команды для смыкания муфты расцепления привода на ведущие колеса в первый раз, когда скорость вращения двигателя по существу равно скорости вращения DISG после останова двигателя. Система привода на ведущие колеса транспортного средства с гибридным приводом содержит дополнительные выполняемые постоянные команды для смыкания муфты расцепления привода на ведущие колеса в ответ на запрос запустить двигатель. Система привода на ведущие колеса транспортного средства с гибридным приводом содержит дополнительные выполняемые постоянные команды для оценки крутящего момента муфты расцепления привода на ведущие колеса на основании силы прижатия муфты расцепления привода на ведущие колеса. Система привода на ведущие колеса транспортного средства с гибридным приводом дополнительно содержит датчик скорости вращения DISG и датчик скорости вращения турбины гидротрансформатора для определения скорости вращения турбины гидротрансформатора. Система привода на ведущие колеса транспортного средства с гибридным приводом включает в себя те случаи, когда режим управления скоростью вращения включает в себя регулирование крутящего момента DISG для регулирования скорости вращения DISG.
Способы и системы по фиг. 1-3 и 21-22 предусматривают приведение в действие привода на ведущие колеса транспортного средства с гибридным приводом, содержащее: регулирование выходного крутящего момента встроенного в привод на ведущие колеса стартера/генератора (DISG) в ответ на разность меду требуемым крутящим моментом привода на ведущие колеса и фактическим крутящим моментом привода на ведущие колеса во время по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса. Таким образом, требуемый крутящий момент может обеспечиваться, даже если оценка крутящего момента расцепления привода на ведущие колеса включает в себя ошибку. Способ включает в себя те случаи, когда требуемый крутящий момент привода на ведущие колеса является требуемым крутящим моментом насосного колеса гидротрансформатора, и где фактический крутящий момент привода на ведущие колеса является фактическим крутящим моментом насосного колеса гидротрансформатора.
В одном из примеров, способ включает в себя те случаи, когда требуемый крутящий момент привода на ведущие колеса основан на крутящем моменте требования водителя. Способ дополнительно содержит регулирование выходного крутящего момента DISG на основании оценки с разомкнутым контуром крутящего момента муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда оценка с разомкнутым контуром крутящего момента муфты расцепления привода на ведущие колеса основана на команде прижатия муфты расцепления привода на ведущие колеса. Способ дополнительно содержит проворачивание коленчатого вала двигателя посредством смыкания муфты расцепления привода на ведущие колеса. Способ дополнительно содержит запуск двигателя посредством подачи топлива и искры в двигатель до того, как муфта расцепления привода на ведущие колеса сомкнута полностью.
Способы и системы по фиг. 1-3 и 21-22 предусматривают приведение в действие привода на ведущие колеса транспортного средства с гибридным приводом, содержащее: регулирование выходного крутящего момента встроенного в привод на ведущие колеса стартера/генератора (DISG) в ответ на разность меду требуемым крутящим моментом привода на ведущие колеса и фактическим крутящим моментом привода на ведущие колеса во время по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса; и регулирование передаточной функции муфты расцепления привода на ведущие колеса на основании разности между требуемым крутящим моментом привода на ведущие колеса и фактическим крутящим моментом привода на ведущие колеса. Способ включает в себя те случаи, когда передаточная функция описывает крутящий момент муфты расцепления привода на ведущие колеса в качестве функции силы прижатия муфты расцепления привода на ведущие колеса.
В некоторых примерах, способ дополнительно содержит проворачивание коленчатого вала двигателя посредством по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса. Способ дополнительно содержит запуск двигателя посредством подачи искры и топлива в двигатель до полного смыкания муфты расцепления привода на ведущие колеса. Способ дополнительно содержит полное смыкание муфты расцепления привода на ведущие колеса в ответ на скорость вращения двигателя, являющееся по существу равным скорости вращения DISG, в первый раз после останова двигателя. Способ включает в себя те случаи, когда требуемый крутящий момент привода на ведущие колеса основан на входном сигнале педали акселератора. Способ включает в себя те случаи, когда фактический крутящий момент привода на ведущие колеса основан на выходном сигнале датчика крутящего момента.
Способы и системы по фиг. 1-3 и 21-22 предусматривают систему привода на ведущие колеса транспортного средства с гибридным приводом, содержащую: датчик крутящего момента привода на ведущие колеса; встроенный в привод на ведущие колеса стартер/генератор (DISG); двигатель; муфту расцепления привода на ведущие колеса, расположенную в приводе на ведущие колеса между двигателем и DISG; и контроллер, содержащий выполняемые постоянные команды для регулирования выходного крутящего момента DISG в ответ на разность между требуемым крутящим моментом привода на ведущие колеса и выходным сигналом датчика крутящего момента привода на ведущие колеса во время прижатия муфты расцепления привода на ведущие колеса. Система привода на ведущие колеса транспортного средства с гибридным приводом содержит дополнительные выполняемые постоянные команды для смыкания муфты расцепления привода на ведущие колеса в первый раз, когда скорость вращения двигателя по существу равно скорости вращения DISG после запуска двигателя.
В некоторых примерах, система привода на ведущие колеса транспортного средства с гибридным приводом содержит дополнительные выполняемые постоянные команды для смыкания муфты расцепления привода на ведущие колеса в ответ на запрос запустить двигатель. Система привода на ведущие колеса транспортного средства с гибридным приводом дополнительно содержит дополнительные выполняемые постоянные команды для регулирования передаточной функции муфты расцепления привода на ведущие колеса в ответ на разность между требуемым крутящим моментом привода на ведущие колеса и выходным сигналом датчика крутящего момента привода на ведущие колеса. Система привода на ведущие колеса транспортного средства с гибридным приводом включает в себя те случаи, когда датчик крутящего момента привода на ведущие колеса расположен между насосным колесом гидротрансформатора и DISG. Система привода на ведущие колеса транспортного средства с гибридным приводом включает в себя те случаи, когда датчик крутящего момента привода на ведущие колеса расположен между турбиной гидротрансформатора и набором шестерен трансмиссии.
Далее, со ссылкой на фиг. 23, показана блок-схема последовательности операций способа для улучшения перезапуска двигателя после прекращения сгорания в двигателе. Способ по фиг. 23 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
На 2302, способ 2300 определяет условия эксплуатации. Условия эксплуатации могут включать в себя, но не в качестве ограничения, скорость вращения двигателя, положение двигателя, состояние муфты расцепления привода на ведущие колеса, скорость вращения DISG и температуру окружающей среды. Способ 2300 переходит на 2304 после того, как определены условия эксплуатации.
На 2304, способ 2300 оценивает, присутствуют или нет условия для автоматического останова двигателя из вращения. В одном из примеров, вращение двигателя может останавливаться, когда требуемый крутящий момент привода на ведущие колеса меньше, чем пороговое значение. В еще одном примере, вращение двигателя может останавливаться, когда скорость транспортного средства меньше, чем пороговый крутящий момент. Если способ 2300 делает вывод, что условия для автоматического останова вращения двигателя присутствуют, способ 2300 переходит на 2306. Иначе, способ 2300 переходит на выход.
На 2306, способ 2300 последовательно прекращает впрыск топлива в цилиндры двигателя, так что сгорание топлива в цилиндрах двигателя не останавливается на полпути в течение впрыска топлива в конкретный цилиндр. Способ 2300 переходит на 2308 после того, как прекращен впрыск топлива.
На 2308, способ 2300 оценивает, находится или нет скорость вращения двигателя ниже верхней пороговой скорости вращения шума, вибрации, неплавности движения (NVH) и выше нижней пороговой скорости вращения NVH. Если так, ответом является да, и способ 2300 переходит на 2310. Иначе, ответом является нет, и способ 2300 возвращается на 2330.
На 2310, способ 2300 оценивает, находится или нет угол поворота коленчатого вала двигателя в заданном местоположении по мере того, как вращается двигатель. В одном из примеров, заданное положение является углом поворота коленчатого вала в пределах заданного количества градусов угла поворота коленчатого вала после того, как конкретный цилиндр осуществляет вращение через верхнюю мертвую точку такта сжатия (например, в пределах 90 градусов угла поворота коленчатого вала после верхней мертвой точке такта сжатия цилиндра для четырехцилиндрового двигателя). Если способ 2300 делает вывод, что угол поворота коленчатого вала двигателя не находится в заданном местоположении, ответом является нет, и способ 2300 возвращается на 2308. Иначе, ответом является да, и способ 2300 переходит на 2312.
На 2312, способ 2300 дает команду стартеру ввести в зацепление ведущий вал зубчатой передачи и ведущую шестерню стартера с зубчатым венцом маховика двигателя. Ведущий вал зубчатой передачи стартера может перемещаться посредством соленоида, и ведущая шестерня стартера может начинать вращаться, когда ведущий вал зубчатой передачи полностью вытянут. В других примерах, ведущий вал зубчатой передачи и насадной зубчатый венец могут управляться раздельно, чтобы предоставлять возможность независимого ввода в действие. Способ 2300 переходит на 2314 после того, как ведущему валу зубчатой передачи и ведущей шестерне дана команда зацепляться с двигателем.
На 2314, способ 2300 оценивает, являются или нет ведущий вал зубчатой передачи и ведущая шестерня полностью введенными в зацепление с маховиком двигателя. В одном из примеров, ведущий вал зубчатой передачи и ведущая шестерня могут определяться введенными в зацепление с двигателем посредством выходных сигналов датчиков (например, концевого выключателя) или посредством тока стартера. Если способ 2300 делает вывод, что ведущий вал зубчатой передачи и ведущая шестерня зацепились с двигателем, ответом является да, и способ 2300 переходит на 2316. Иначе, ответом является нет, и способ 2300 переходит на 2322.
На 2316, способ 2300 регулирует дроссель двигателя на второе положение на основании зацепления ведущего вала зубчатой передачи и ведущей шестерни с маховиком двигателя в подготовке к возможному изменению намерения водителя остановить двигатель. В одном из примеров, второе положение дросселя является открытым в большей степени, чем первое положение дросселя на 2322. Положение дросселя двигателя регулируется на в большей степени открытое положение, с тем чтобы обеспечивать более высокий крутящий момент двигателя, если происходит изменение намерения водителя после зацепления стартера. Крутящий момент двигателя может подвергаться влиянию, когда ведущая шестерня зацепляется с маховиком. Регулирование количества воздуха может компенсировать влияние, которое зацепленная ведущая шестерня может иметь на перезапуск двигателя и замедление двигателя. Способ 2300 переходит на 2318 после того, как отрегулировано положение дросселя двигателя.
На 2318, способ 2300 оценивает, произошло ли изменение намерения водителя после того, как была дана команда ввода в зацепление ведущего вала зубчатой передачи стартера и ведущей шестерни стартера. Изменение намерения водителя указывает, что водитель желает продолжать прикладывать крутящий момент к колесам транспортного средства, чтобы поддерживать или увеличивать скорость транспортного средства. В одном из примеров, изменение намерения водителя может указываться отпусканием тормозной педали или увеличением команды крутящего момента двигателя с помощью педали акселератора. Если способ 2300 делает вывод, что изменение намерения водителя запрошено до того, как останавливается вращение двигателя, ответом является да, и способ 2300 переходит на 2320. Иначе, ответом является нет, и способ 2300 возвращается на 2308.
На 2320, способ 2300 проворачивает коленчатый вал двигателя посредством стартера и перезапускает двигатель после того, как ведущий вал зубчатой передачи и ведущая шестерня стартера вошли в зацепление с маховиком двигателя. Топливо и искра также еще раз подаются в цилиндры двигателя, чтобы содействовать сгоранию в цилиндрах двигателя. Способ 2300 осуществляет выход после того, как двигатель подвергнут проворачиванию коленчатого вала и перезапущен.
На 2322, способ 2300 регулирует дроссель двигателя на первое положение на основании отсутствия зацепления ведущего вала зубчатой передачи и ведущей шестерни с маховиком двигателя. В одном из примеров, первое положение дросселя является закрытым в большей степени, чем второе положение дросселя на 2316. Положение дросселя двигателя регулируется на в большей степени закрытое положение, с тем чтобы снижать поток воздуха двигателя и уменьшать окисление в пределах каталитического нейтрализатора системы выпуска. Способ 2300 возвращается на 2308 после того, как положение дросселя двигателя отрегулировано на первое положение.
На 2330, способ 2300 оценивает, находится или нет скорость вращения двигателя ниже, чем нижнее пороговое значение скорости вращения NVH, и находится или нет скорость вращения двигателя выше порогового значения скорости вращения зацепления. Скорость вращения зацепления является скоростью вращения двигателя, ниже которого двигатель может вращаться в обратном направлении, в то время как двигатель останавливается. Если скорость вращения двигателя находится выше скорости вращения зацепления и ниже нижнего порогового значения скорости вращения NVH, ответом является да, и способ 2300 переходит на 2332. Иначе, ответом является нет, и способ 2300 переходит на 2350. Способ 2300 также прекращает пытаться вводить в зацепление стартер при скоростях вращения двигателя ниже скорости вращения зацепления и выше нулевой скорости вращения двигателя.
На 2332, способ 2300 дает команду ведущему валу зубчатой передачи и ведущей шестерне стартера входить в зацепление с зубчатым венцом маховика двигателя. Ведущему валу зубчатой передачи и ведущей шестерне стартера может даваться команда входить в зацепление с зубчатым венцом маховика двигателя, как описано на 2312. Способ 2300 переходит на 2334 после того, как ведущему валу зубчатой передачи и ведущей шестерне стартера дана команда входить в зацепление с маховиком двигателя.
На 2334, способ 2300 оценивает, входят или нет ведущий вал зубчатой передачи и ведущая шестерня в зацепление с зубчатым венцом маховика двигателя. Способ 2300 оценивает, зацепляются ли ведущий вал зубчатой передачи и ведущая шестерня с зубчатым венцом маховика, как описано на 2314. Если способ 2300 делает вывод, что маховик зацеплен ведущим валом зубчатой передачи и ведущей шестерней, ответом является да, и способ 2300 переходит на 2336. Иначе, ответом является нет, и способ 2300 переходит на 2342.
На 2336, способ 2300 регулирует положение дросселя на четвертое положение. Поскольку зацепление ведущего вала зубчатой передачи и ведущей шестерни стартера с маховиком двигателя происходит на более низкой скорости вращения двигателя, может быть желательным регулировать торможение двигателем посредством управления количеством воздуха двигателя с помощью дросселя на другую величину по сравнению с тем, когда зацепление ведущего вала зубчатой передачи и ведущей шестерни стартера с зубчатым венцом маховика двигателя предпринимается на более высокой скорости вращения двигателя. Кроме того, регулирование количества воздуха двигателя может компенсировать зацепление ведущей шестерни. В одном из примеров, четвертое положение является положением, где дроссель закрыт в большей степени, чем первое и второе положение на 2322 и 2316. Кроме того, четвертое положение дросселя открыто в большей степени, чем третье положение дросселя на 2342, чтобы приготовиться к состоянию изменения намерения водителя. Регулирование дросселя на основании скорости вращения двигателя также может обеспечивать более точное регулирование положение двигателя при останове двигателя. Способ 2300 переходит на 2338 после того, как дроссель отрегулирован на четвертое положение.
На 2338, способ 2300 оценивает, присутствует или нет изменение намерения водителя. Изменение намерения водителя может определяться, как описано на 2318. Если способ 2300 делает вывод, что присутствует изменение намерения водителя, ответом является да, и способ 2300 переходит на 2340. Иначе, ответом является нет, и способ 2300 возвращается на 2310.
На 2340, способ 2300 проворачивает коленчатый вал двигателя для запуска и подает искру и топливо на двигатель. Способ 2300 может проворачивать двигатель с помощью стартера или DISG, как описано на 2320. Способ 2300 переходит на выход после того, как двигатель подвергается проворачиванию коленчатого вала и перезапускается в ответ на изменение намерения водителя.
На 2342, способ 2300 регулирует дроссель на третье положение. Третье положение может быть положением дросселя, которое закрыто в большей степени, чем четвертое положение, описанное на 2336. Третье положение также может быть положением дросселя, которое закрыто в большей степени, чем первое и второе положения, описанные на 2322 и 2316. Способ 2300 возвращается на 2310 после того, как отрегулировано положение дросселя двигателя.
На 2350, способ 2300 дает команду ведущему валу зубчатой передачи и ведущей шестерне стартера входить в зацепление с зубчатым венцом маховика двигателя после того, как двигатель остановил вращение, если они не введены в зацепление. Зацепление ведущего вала зубчатой передачи и ведущей шестерни стартера после останова двигателя может снижать износ стартера и/или зубчатого венца. Кроме того, посредством зацепления ведущего вала зубчатой передачи и ведущей шестерни стартера до того, как двигатель перезапущен, может быть возможным сокращать время запуска двигателя. Способ 2300 переходит на 2352 после того, как ведущему валу зубчатой передачи и ведущей шестерне стартера была дана команда входить в зацепление с зубчатым венцом маховика двигателя.
На 2352, двигатель автоматически перезапускается в ответ на условия эксплуатации после того, как двигатель прекращает вращаться. Двигатель может перезапускаться в ответ на запрос крутящего момента двигателя от водителя или в ответ на отпускание водителем тормоза. Автоматический запуск двигателя происходит, когда двигатель перезапускается без приведения в действие или управления водителем устройством, которое имеет единственную функцию запуска двигателя (например, кнопочным переключателем запуска). Автоматический запуск двигателя может инициироваться водителем, приводящим в действие или оперирующим устройством, которое имеет более чем одну функцию, таким как тормозная педаль, которая может применять тормоза транспортного средства или, во вторую очередь, в качестве указания, когда следует запускать двигатель. Способ 2300 перезапускает двигатель посредством стартерного электродвигателя или посредством DISG и переходит на выход.
Таким образом, способ по фиг. 23 может регулировать положение дросселя в ответ на зацепление стартера, чтобы дополнительно улучшать перезапуск двигателя в случае изменения намерения водителя. Кроме того, способ по фиг. 23 регулирует положение дросселя во время останова двигателя согласно числу оборотов двигателя, с тем чтобы улучшать положение останова двигателя посредством ограничения обратного вращения двигателя.
Далее, со ссылкой на фиг. 24, показана примерная последовательность для улучшения перезапуска двигателя и сгорания после останова двигателя согласно способу по фиг. 23. Последовательность по фиг. 24 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 24 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 2402 представляет верхнее пороговое значение скорости вращения двигателя NVH. Горизонтальная линия 2404 представляет нижнее пороговое значение скорости вращения двигателя NVH. Горизонтальная линия 2406 представляет пороговое значение скорости вращения зацепления ведущей шестерни, где ведущая шестерня не вводится в зацепление, если скорость вращения двигателя ниже горизонтальной линии 2406, пока двигатель не прекратил вращение. Пороговое значение зацепления может уменьшать ухудшение характеристик стартера.
Второй график сверху по фиг. 24 представляет состояние впрыска топлива в зависимости от времени. Ось Y представляет состояние впрыска топлива. Впрыск топлива активен, когда кривая находится на верхнем уровне. Впрыск топлива остановлен, когда кривая находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 24 представляет положение дросселя двигателя в зависимости от времени. Ось Y представляет положение дросселя двигателя, и положение дросселя двигателя возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 24 представляет собой состояние ведущей шестерни стартера в зависимости от времени. Ось Y представляет состояние ведущей шестерни стартера, и уровни зацепления описаны рядом с осью Y. Ведущая шестерня возвращена в исходное положение, когда кривая находится на уровне RET. Ведущая шестерня выдвинута, но не введена в зацепление, когда кривая находится на уровне ADV. Ведущая шестерня зацепляется с маховиком двигателя, когда кривая находится на уровне ENG. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 24 представляет состояние тормозов транспортного средства (например, состояние фрикционных тормозов) в зависимости от времени. Ось Y представляет состояние тормозов транспортного средства, и тормоза нажаты, когда кривая находится на верхнем уровне. Тормоза отпущены, когда кривая находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T42 времени, скорость вращения двигателя является повышенным, впрыск топлива активен, дроссель частично открыт, стартер не введен в зацепление, а тормоз не нажат. Эти условия являются указывающими транспортное средство, которое осуществляет крейсерское движение на умеренной скорости (например, 40 миль в час). Между моментом T42 времени и моментом T43 времени, тормоза транспортного средства применяются для замедления транспортного средства. В проиллюстрированных условиях, транспортное средство может быть движущимся или может остановиться между моментом T42 времени и моментом T43 времени.
В момент T43 времени, сгорание в двигателе прекращается в ответ на применение тормоза транспортного средства и снижение положения дросселя, которое основано на крутящем моменте требования водителя. Как результат, скорость вращения двигателя уменьшается до нахождения на или меньшем, чем верхнее пороговое значение 2402 скорости вращения двигателя NVH. Ведущей шестерне стартера дается команда зацепляться с маховиком двигателя, но ведущая шестерня только выдвигается и не зацепляется полностью с маховиком двигателя. Положение дросселя понижается в ответ на скорость вращения двигателя, являющееся меньшим. чем верхнее пороговое значение NVH, и являющееся большим, чем пороговое значение NVH. Кроме того, положение дросселя регулируется в ответ на положение ведущей шестерни стартера, являющееся выдвинутым, но не зацепленным. Дроссель открывается до первого положения 2410. Скорость вращения двигателя продолжает уменьшаться, и ведущая шестерня зацепляется с маховиком непосредственно перед моментом T44 времени. Положение дросселя двигателя регулируется на второе положение 2412 в ответ на ведущую шестерню, зацепляющуюся с маховиком двигателя. Второе положение дросселя является открытым в большей степени, чем первое положение. Посредством открывания дросселя в большей степени после того, как ведущая шестерня введена в зацепление, может быть возможным готовиться к изменению намерения водителя, так что может улучшаться перезапуск двигателя.
В момент T44 времени, тормозная педаль отпускается водителем, что интерпретируется в качестве изменения намерения водителя останавливать двигатель. Впрыск топлива возобновляется, и стартер выдает крутящий момент запуска двигателя через введенную в зацепление ведущую шестерню. Двигатель перезапускается, и ведущая шестерня возвращается в прежнее состояние вскоре после этого. Между моментом T44 времени и моментом T45 времени, двигатель разгоняется и замедляется при меняющихся условиях вождения. Тормоз вновь применяется непосредственно перед моментом T45 времени.
В момент T45 времени, сгорание прекращается в двигателе, и двигатель начинает замедляться. Вскоре после этого, скорость вращения двигателя снижается до меньшего, чем верхнее пороговое значение 2402 скорости вращения двигателя NVH. Ведущая шестерня выдвигается в ответ на скорость вращения двигателя, являющееся меньшим, чем верхнее пороговое значение скорости вращения двигателя NVH, и являющееся большим, чем нижнее пороговое значение скорости вращения двигателя NVH, но ведущая шестерня не полностью зацепляется с маховиком двигателя. Дроссель двигателя регулируется на первое положение 2410 в ответ на скорость вращения двигателя и состояние ведущей шестерни. Скорость вращения двигателя продолжает уменьшаться, и дроссель регулируется на третье положение 2414, когда скорость вращения двигателя меньше, чем нижнее пороговое значение 2404 скорости вращения двигателя NVH, и большим, чем пороговое значение 2406 зацепления. Третье положение 2414 является открытым в меньшей степени, чем первое положение 2410 и второе положение 2412. Ведущая шестерня зацепляется с маховиком двигателя, в то время как скорость вращения двигателя меньше, чем нижнее пороговое значение 2404 скорости вращения двигателя NVH, и большим, чем пороговое значение 2406 зацепления. Следовательно, дроссель регулируется на четвертое положение в ответ на положение ведущей шестерни и скорость вращения двигателя. Четвертое положение 2416 является открытым в большей степени, чем третье положение 2414. Четвертое положение может обеспечивать достаточное количество воздуха в двигатель, так чтобы двигатель мог легче перезапускаться в случае изменения намерения водителя. Скорость вращения двигателя достигает нуля без изменения намерения водителя, и ведущая шестерня остается зацепленной.
В момент T46 времени, водитель отпускает тормоз, и двигатель перезапускается посредством зацепленной ведущей шестерни в ответ на отпускание тормоза. Впрыск топлива также возобновляется в ответ на отпускание тормоза и последующий запрос запустить двигатель.
Таким образом, положение дросселя двигателя может регулироваться для улучшения перезапуска двигателя, в то время как двигатель останавливается. Регулирование положения дросселя двигателя в ответ н скорость вращения двигателя и состояние ведущей шестерни во время останова двигателя может помогать снабжать двигатель количеством воздуха, которое может улучшать запуск двигателя. Дополнительно, если ведущая шестерня не зацепляется перед остановом двигателя, отрегулированное положение дросселя может улучшать останов двигателя посредством регулирования количества воздуха двигателя предсказуемым образом во время останова двигателя.
Способы и системы по фиг. 1-3 и 23-24 предусматривают остановку вращения двигателя, содержащую: прекращение подачи топлива в цилиндры двигателя, сжигающие воздух и топливо; подачу команды включения стартера из состояния, не зацепленного с двигателем в зацепленное с двигателем; и регулирование положения дросселя на основании того, зацепляется или нет стартер с двигателем. Таким образом, двигатель может быть в большей степени подготовлен к запуску, если водитель изменил намерение. Способ включает в себя те случаи, когда стартер зацепляется с двигателем через ведущую шестерню. Способ включает в себя те случаи, когда дроссель регулируется на первое положение, когда стартер не зацепляется с двигателем, в пределах первого диапазона скоростей вращения двигателя. Способ включает в себя те случаи, когда дроссель регулируется на второе положение, когда стартер зацепляется с двигателем в пределах первого диапазона скоростей вращения двигателя, второе положение является открытым в большей степени, чем первое положение.
В некоторых примерах, способ дополнительно содержит те случаи, когда стартеру дается команда зацепляться с двигателем в пределах заданного углового окна по коленчатому валу. Способ включает в себя те случаи, когда угловое окно по коленчатому валу находится в пределах ±40 градусов угла поворота коленчатого вала от верхней мертвой точки такта цилиндра. Способ включает в себя те случаи, когда скорость вращения двигателя является понижающимся во время подачи команды зацепления со стартером.
Способы и системы по фиг. 1-3 и 23-24 предусматривают остановку вращения двигателя, содержащую: прекращение подачи топлива в цилиндры двигателя, сжигающие воздух и топливо; подачу команды включения стартера, который не зацеплен с двигателем, для зацепления с двигателем; и регулирование положения дросселя на основании того, зацепляется или нет стартер с двигателем, и скорости вращения двигателя. Способ включает в себя те случаи, когда положение дросселя регулируется на в большей степени закрытое положение при скоростях вращения двигателя, меньших, чем пороговая скорость вращения, и на в большей мере открытое положение при скоростях вращения двигателя, больших чем пороговая скорость вращения. Способ включает в себя те случаи, когда дроссель регулируется на первое положение, когда стартер не зацепляется с двигателем, в пределах первого диапазона скоростей вращения двигателя. Способ включает в себя те случаи, когда дроссель регулируется на второе положение, когда стартер зацепляется с двигателем в пределах первого диапазона скоростей вращения двигателя, второе положение является открытым в большей степени, чем первое положение. Способ включает в себя те случаи, когда дроссель регулируется на третье положение, когда стартер не зацепляется с двигателем, в пределах второго диапазона скоростей вращения двигателя. Способ включает в себя те случаи, когда дроссель регулируется на четвертое положение, когда стартер зацепляется с двигателем в пределах второго диапазона скоростей вращения двигателя, четвертое положение является открытым в большей степени, чем третье положение.
Способы и системы по фиг. 1-3 и 23-24 предусматривают систему транспортного средства, содержащую: двигатель, включающий в себя дроссель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; стартер, включающий в себя базовое состояние, где стартер не зацеплен с двигателем, трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для регулирования положения дросселя во время останова двигателя на основании того, зацепляется или нет стартер с двигателем, в ответ на запрос останова двигателя и до останова двигателя.
В некоторых примерах, система транспортного средства включает в себя те случаи, когда дроссель регулируется на первое положение в ответ на то, что стартер не зацепляется с двигателем. Система транспортного средства включает в себя те случаи, когда дроссель регулируется на второе положение в ответ на стартер, зацепляющийся с двигателем, второе положение в большей степени открыто, чем первое положение. Система транспортного средства дополнительно содержит дополнительные команды для регулирования положения дросселя в ответ на скорость вращения двигателя. Система транспортного средства дополнительно содержит дополнительные команды для зацепления стартера в заданном положении коленчатого вала. Система транспортного средства включает в себя те случаи, когда заданное расположение коленчатого вала имеет значение ±40 градусов поворота коленчатого вала от нижней мертвой точки такта сжатия цилиндра. Система транспортного средства дополнительно содержит дополнительные команды для останова попытки зацеплять стартер на скоростях вращения двигателя ниже скорости вращения зацепления и выше нулевой скорости вращения двигателя.
Далее, со ссылкой на фиг. 25, показана блок-схема последовательности операций способа для регулирования профиля скорости вращения глушения двигателя и положения останова вращения двигателя. Способ по фиг. 25 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
На 2502, способ 2500 оценивает, произошел или нет запрос останова вращения двигателя. Запрос останова вращения двигателя может обеспечиваться контроллером или водителем. Контроллер может автоматически останавливать двигатель без подачи входного сигнала водителем из специализированного исполнительного механизма, который имеет единственную функцию останова и/или запуска двигателя. Например, автоматический останов двигателя не происходит, когда водитель устанавливает замок зажигания в отключенное состояние. В качестве альтернативы, автоматический останов двигателя может происходить, когда водитель отпускает педаль акселератора. Если способ 2500 делает вывод, что запрошен останов двигателя, ответом является да, и способ 2500 переходит на 2504. Иначе, ответом является нет, и способ 2500 переходит на выход.
На 2504, способ 2500 оценивает, должно или нет останавливаться вращение двигателя с проскальзыванием муфты расцепления привода на ведущие колеса. На 2500 оценивает, должен или нет двигатель останавливаться, в то время как муфта расцепления привода на ведущие колеса является проскальзывающей, на основании условий эксплуатации. В одном из примеров, двигатель может останавливаться без проскальзывающей муфты расцепления привода на ведущие колеса, когда желательно останавливать двигатель за короткий период времени. Например, может быть желательно быстро останавливать двигатель, когда скорость вращения двигателя является относительно низким во время запроса останова двигателя. С другой стороны, двигатель может останавливаться, в то время как муфта расцепления привода на ведущие колеса является проскальзывающей, когда скорость вращения двигателя является относительно высоким во время запроса останова двигателя. Должно быть упомянуто, что вращение двигателя может останавливаться с разомкнутой муфтой расцепления привода на ведущие колеса во время некоторых условий. Если способ 2500 делает вывод, что вращение двигателя должно останавливаться с проскальзывающей муфтой расцепления привода на ведущие колеса, ответом является да, и способ 2500 переходит на 2530. Иначе, ответом является нет, и способ 2500 переходит на 2506.
На 2530, способ 2500 определяет требуемое давление в маслопроводе муфты трансмиссии. В одном из примеров, требуемое давление в маслопроводе муфты трансмиссии может быть основано на величине давления муфты, которое должно удерживать транспортное средство остановленным на дороге, в то время как двигатель остановил вращение. Таким образом, требуемое давление в маслопроводе муфты трансмиссии может возрастать, если транспортное средство остановлено на возвышенности. В одном из примеров, требуемое давление в маслопроводе муфты трансмиссии определяется опытным путем и сохраняется в таблице или функции, которая индексируется уклоном дороги и массой транспортного средства. Таблица выводит требуемое давление в маслопроводе муфты трансмиссии в ответ на уклон дороги и массу транспортного средства. Способ 2500 переходит на 2532 после того, как определено требуемое давление в маслопроводе трансмиссии.
На 2532, способ 2500 вращает DISG на скорости вращения, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии посредством вращения масляного насоса трансмиссии. DISG присоединен к насосному колесу гидротрансформатора, а насосное колесо гидротрансформатора присоединено по текучей среде к турбине гидротрансформатора. Масляный насос трансмиссии приводится в движение насосным колесом гидротрансформатора, и масляный насос трансмиссии подает давление масла на муфты трансмиссии, когда вращается. В одном из примеров, требуемое давление в маслопроводе трансмиссии индексирует таблицу, которая включает в себя определенные опытным путем значения скорости вращения DISG, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии. Скорость вращения DISG выводится из таблицы, и DISG регулируется по скорости вращения значением, выведенным из таблицы. Способ 2500 переходит на 2534 после того, как DISG начинает вращение на требуемой скорости вращения.
На 2534, способ 2500 прекращает поток топлива и искру для цилиндров двигателя. Поток топлива в цилиндры может прекращаться закрыванием топливных форсунок. Кроме того, поток топлива может прекращаться в последовательном порядке на основании порядка сгорания в двигателе, так что цилиндры не подвергаются частичному снабжению топливом, когда дана команда остановить вращение двигателя. Способ 2500 переходит на 2536 после того, как останавливается поток топлива и зажигание в цилиндры двигателя.
На 2536, способ 2500 осуществляет проскальзывание муфты расцепления привода на ведущие колеса для достижения требуемой траектории скорости вращения двигателя. В одном из примеров, определенные опытным путем траектории прижатия или проскальзывания муфты расцепления привода на ведущие колеса сохраняются в памяти и применяются к муфте расцепления привода на ведущие колеса, когда запрошен останов двигателя. Таблица траекторий проскальзывания прикладывает давление к муфте расцепления привода на ведущие колеса с разными скоростями в зависимости от скорости вращения двигателя, когда произведен запрос останова двигателя. В качестве альтернативы, определенная опытным путем передаточная функция, которая выводит силу или давление прижатия муфты расцепления привода на ведущие колеса на основании требуемого давления муфты расцепления привода на ведущие колеса, которое является основой для приведения в действие муфты расцепления привода на ведущие колеса. Дополнительно, траектория проскальзывания может включать в себя установку момента, когда давление должно подаваться на муфту расцепления привода на ведущие колеса. Например, давление может прикладываться к муфте расцепления привода на ведущие колеса через предписанное количество градусов угла поворота коленчатого вала после того, как последнее количество топлива подается в цилиндр двигателя перед остановом двигателя. Таким образом, начальный момент времени прикладывания давления муфты расцепления привода на ведущие колеса и скорость, с которой прикладывается давление к муфте расцепления привода на ведущие колеса, хранятся в памяти и применяются, когда выдан запрос останова двигателя. Способ 2500 переходит на 2538 после того, как инициировано применение профиля давления муфты расцепления привода на ведущие колеса.
На 2538, способ 2500 дает команду муфтам трансмиссии связывать выходной вал трансмиссии с картером трансмиссии. Выходной вал трансмиссии может связываться к трансмиссии посредством совместного применения муфт трансмиссии, иных чем муфта расцепления привода на ведущие колеса, одновременно, как описано в заявке № 12/833,788 на выдачу патента США. Способ 2500 переходит на 2540 после того, как трансмиссии дана команда в связанное состояние.
На 2540, способ 2500 размыкает муфту расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса может размыкаться, когда скорость вращения двигателя находится по существу на нуле (например, 100 оборотах в минуту или меньше), и двигатель остановлен в требуемом положении. В качестве альтернативы, муфта расцепления привода на ведущие колеса может размыкаться, когда скорость вращения двигателя падает до заданного значения. Таким образом, посредством регулирования работы муфты расцепления привода на ведущие колеса, способ 2500 может управлять траекторией скорости вращения двигателя частично или полностью, вплоть до нулевой скорости вращения двигателя. Способ 2500 переходит на выход после того, как муфта расцепления привода на ведущие колеса разомкнута.
На 2506, способ 2500 смыкает муфту расцепления привода на ведущие колеса, если муфта расцепления привода на ведущие колеса еще не сомкнута. Муфта расцепления привода на ведущие колеса может смыкаться посредством повышения сигнала рабочего цикла, который повышает давление прижатия муфты расцепления привода на ведущие колеса. Способ 2500 переходит на 2508 после того, как муфта расцепления привода на ведущие колеса сомкнута.
На 2508, способ 2500 прекращает поток топлива и искру для цилиндров двигателя. Поток топлива и искра могут прекращаться, как описано на 2534. Способ 2500 переходит на 2510 после того, как остановлены поток топлива и искра в цилиндры двигателя.
На 2510, способ 2500 регулирует скорость вращения и крутящий момент DISG, чтобы обеспечивать требуемый профиль скорости вращения двигателя во время останова вращения двигателя. В одном из примеров, определенная опытным путем группа траекторий скорости вращения двигателя хранится в памяти и используется в качестве основы для останова двигателя. Например, если скорость вращения двигателя больше, чем у траектории скорости вращения двигателя, извлеченной из памяти, поглощение крутящего момента DISG увеличивается, чтобы направлять скорость вращения двигателя к требуемому профилю скорости вращения двигателя. Если скорость вращения двигателя меньше, чем у траектории скорости вращения двигателя, извлеченной из памяти, крутящий момент DISG увеличивается, чтобы направлять скорость вращения двигателя к требуемому профилю скорости вращения двигателя. Таблица траекторий скорости вращения двигателя замедляет скорость вращения двигателя с разным темпом в зависимости от скорости вращения двигателя, когда произведен запрос останова двигателя. Дополнительно, траектория скорости вращения двигателя может включать в себя установку момента, когда траектория скорости вращения двигателя должна регулироваться посредством DISG. Например, траектория скорости вращения двигателя может регулироваться посредством DISG касательно предписанного количества градусов угла поворота коленчатого вала после того, как последнее количество топлива подается в цилиндр двигателя перед остановом двигателя. Таким образом, начальный момент времени применения профиля скорости вращения двигателя и темп, с которым снижается скорость вращения двигателя, хранятся в памяти и регулируются посредством DISG, когда выдан запрос останова двигателя. Способ 2500 переходит на 2512 после того, как инициировано применение профиля давления муфты расцепления привода на ведущие колеса.
На 2512, способ 2500 дает команду муфтам трансмиссии связывать выходной вал трансмиссии с картером трансмиссии. Выходной вал трансмиссии может связываться к трансмиссии посредством совместного применения муфт трансмиссии, иных чем муфта расцепления привода на ведущие колеса, одновременно, как описано в заявке № 12/833,788 на выдачу патента США, которая настоящим полностью включена в состав посредством ссылки. Способ 2500 переходит на 2514 после того, как трансмиссии дана команда в связанное состояние.
На 2514, способ 2500 размыкает муфту расцепления привода на ведущие колеса при заданной скорости вращения двигателя. Муфта расцепления привода на ведущие колеса размыкается, так что двигатель может двигаться по инерции до нулевой скорости вращения, в то время как DISG продолжает вращаться и подавать давление на муфты трансмиссии, в то время как двигатель остановлен. В одном из примеров, муфта расцепления привода на ведущие колеса размыкается на заданной скорости вращения двигателя, которое основано на скорости вращения двигателя, где инициировался останов двигателя (например, скорости вращения двигателя, где прекращался поток топлива в цилиндры двигателя), и темпе затухания скорости вращения двигателя. Кроме того, муфта расцепления привода на ведущие колеса может размыкаться на конкретном угле поворота коленчатого вала, чтобы дополнительно управлять положением останова двигателя. Таблица или функция, индексированная темпом затухания скорости вращения двигателя и скоростью вращения двигателя, где был запрошен останов двигателя, выводит положение двигателя, где размыкается муфта расцепления привода на ведущие колеса. В одном из примеров, положение соответствует положению двигателя, которое улучшает вероятность останова в требуемом положении двигателя (например, в течение заданного интервала по коленчатому валу цилиндра в такте сжатия). Способ 2500 переходит на 2516 после того, как муфта расцепления привода на ведущие колеса разомкнута.
На 2516, способ 2500 определяет требуемое давление в магистрали муфты трансмиссии. Требуемое давление в магистрали муфты трансмиссии определяется, как описано на 2530. Способ 2500 переходит на 2518 после того, как определено требуемое давление в маслопроводе трансмиссии.
На 2518, способ 2500 вращает DISG для поддержания требуемого давления в маслопроводе муфты трансмиссии. DISG может вращаться, как описано на 2532. Способ 2500 переходит на выход после того, как DISG дана команда подавать требуемое давление в маслопроводе муфты трансмиссии. Должно быть отмечено, что DISG может периодически останавливаться и перезапускаться, чтобы поддерживать давление в масляной магистрали муфты трансмиссии. Если давление в маслопроводе муфты трансмиссии имеет низкую скорость утечки, DISG может даваться команда отключаться. DISG может повторно вводиться в действие, если давление в маслопроводе муфты трансмиссии уменьшается до порогового уровня.
Таким образом, положение останова двигателя может регулироваться для транспортного средства с гибридным приводом. Муфта расцепления привода на ведущие колеса может регулировать профиль останова двигателя от скорости вращения холостого хода до нулевой скорости вращения посредством периодической выдачи крутящего момента из DISG на двигатель, так чтобы двигатель останавливался в требуемом положении.
Далее, со ссылкой на фиг. 26, показана примерная последовательность для останова двигателя согласно способу по фиг. 25. Последовательность по фиг. 26 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 26 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 26 представляет собой скорость вращения DISG в зависимости от времени. Ось Y представляет скорость вращения DISG, и скорость вращения DISG возрастает в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 26 представляет силу прижатия муфты расцепления привода на ведущие колеса (например, силу, прикладываемую для смыкания муфты расцепления привода на ведущие колеса) в зависимости от времени. Ось Y представляет силу прижатия муфты расцепления привода на ведущие колеса, и сила прижатия муфты расцепления привода на ведущие колеса возрастает в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 26 представляет собой состояние впрыска топлива в зависимости от времени. Ось Y представляет состояние подачи топлива, и топливо подается на двигатель, когда кривая находится на верхнем уровне. Топливо не подается на двигатель, когда кривая находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 26 представляет собой состояние связывания трансмиссии в зависимости от времени. Ось Y представляет состояние связывания трансмиссии, и трансмиссия связана, когда кривая находится на верхнем уровне. Трансмиссия не связана, когда кривая находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T47 времени, скорость вращения двигателя и скорость вращения DISG равны и находятся на повышенном уровне. Двигатель механически присоединен к DISG через муфту расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса полностью смыкается, когда входная скорость вращения муфты расцепления привода на ведущие колеса равна выходной скорости вращения муфты расцепления привода на ведущие колеса. Кроме того, муфта расцепления привода на ведущие колеса полностью сомкнута, когда сила расцепления привода на ведущие колеса находится на верхнем уровне. Топливо подается в двигатель, как указано состоянием подачи топлива, находящимся на верхнем уровне. Трансмиссия не связана, поскольку состояние связывания трансмиссии находится на нижнем уровне.
В момент T48 времени, двигателю дается команда в отключенное состояние в ответ на условия эксплуатации (например, низкое потребление крутящего момента двигателя и нажатый тормоз транспортного средства). Подача топлива в двигатель прекращается, как указано состоянием подачи топлива, переходящим на нижний уровень. Дополнительно, скорость вращения/крутящий момент DISG регулируются для регулирования траектории скорости вращения и положения двигателя в ответ на запрос остановить двигатель. В одном из примеров, траектория скорости вращения/положения двигателя хранится в памяти, и крутящий момент DISG регулируется в ответ на разность между фактической скоростью вращения двигателя и траекторией требуемой скорости вращения двигателя, которая хранится в памяти. Например, если фактическая скорость вращения двигателя меньше, чем требуемая скорость вращения двигателя в конкретный момент времени после запроса останова двигателя, крутящий момент DISG повышается для перемещения фактической скорости вращения двигателя на требуемую скорость вращения двигателя. В еще одном примере, если конкретное положение двигателя (например, верхняя мертвая точки такта сжатия цилиндра номер один) находится впереди того, где требуется в конкретный момент времени после запроса останова двигателя, отрицательный крутящий момент DISG может повышаться, чтобы замедлять двигатель с большим темпом.
В момент T49 времени, муфта расцепления привода на ведущие колеса размыкается в ответ на двигатель, достигающий заданной скорости вращения. Кроме того, муфты трансмиссии начинают прижиматься, так что выходной вал трансмиссии связывается с картером трансмиссии и шасси транспортного средства. Посредством размыкания муфты расцепления привода на ведущие колеса на заданной скорости вращения, может быть возможным лучше регулировать скорость вращения двигателя во время останова двигателя наряду с предоставлением возможности работать DISG. В этом примере DISG остановлен, но, в других примерах, он может продолжать вращаться, с тем чтобы обеспечивать движущую силу для приведения в действие масляного насоса трансмиссии. Двигатель и DISG останавливаются вскоре после того, как размыкается муфта расцепления.
Таким образом, двигатель может останавливаться, чтобы положение двигателя могло регулироваться во время останова. Посредством регулирования положения останова двигателя, может быть возможным улучшать согласованность рабочих характеристик перезапуска двигателя.
В момент T50 времени, DISG разгоняется и выдает крутящий момент в привод на ведущие колеса в ответ на отпускание водителем тормозной педали (не показано). Таким образом, DISG помогает запускать двигатель. В частности, муфта расцепления привода на ведущие колеса частично смыкается, чтобы передавать крутящий момент с DISG на двигатель. Топливо и искра выдаются в двигатель для поддержки сгорания в двигателе, как указано состоянием подачи топлива, переходящим на верхний уровень. В заключение, муфты трансмиссии также размыкаются, с тем чтобы отвязывать трансмиссию в ответ на отпускание тормоза. Муфта расцепления привода на ведущие колеса полностью смыкается, когда скорость вращения двигателя достигает скорости вращения DISG.
Таким образом, двигатель может перезапускаться, в то время как крутящий момент выдается в привод на ведущие колеса транспортного средства для разгона транспортного средства. Кроме того, муфта расцепления привода на ведущие колеса приводится в действие некоторым образом, который может уменьшать возмущения крутящего момента привода на ведущие колеса.
Между моментом T50 времени и моментом T51 времени, двигатель и DISG подают крутящий момент в привод на ведущие колеса транспортного средства на основании требования водителя. В этом примере, муфта расцепления привода на ведущие колеса остается сомкнутой; однако, она иногда также может размыкаться без останова двигателя.
В момент T51 времени, двигателю дается команда в отключенное состояние в ответ на условия эксплуатации (например, низкое потребление крутящего момента двигателя и нажатый тормоз транспортного средства). Подача топлива в двигатель прекращается, как указано состоянием подачи топлива, переходящим на нижний уровень. Муфте расцепления привода на ведущие колеса также дается команда проскальзывать посредством уменьшения силы прижатия муфты расцепления привода на ведущие колеса. В одном из примеров, коэффициент проскальзывания муфты расцепления привода на ведущие колеса хранится в памяти в качестве функции времени после запроса останова двигателя. Коэффициент проскальзывания может увеличиваться или уменьшаться, если скорость вращения двигателя отличается от требуемой скорости вращения двигателя. Например, если скорость вращения двигателя меньше, чем требуемая скорость вращения двигателя в конкретный момент времени после запроса останова двигателя, проскальзывание муфты расцепления привода на ведущие колеса может уменьшаться посредством увеличения силы прижатия муфты расцепления привода на ведущие колеса. Таким образом, дополнительный крутящий момент может обеспечиваться посредством DISG на двигатель, так чтобы скорость вращения двигателя приводилось в соответствие требуемому числу оборотов двигателя. Частоте оборотов DISG дается команда на скорость вращения, которая предоставляет масляному насосу трансмиссии возможность обеспечивать требуемое давление масла.
В момент T52 времени, скорость вращения двигателя достигает заданной скорости вращения, и муфты трансмиссии применяются для связывания выходного вала трансмиссии к шасси транспортного средства. DISG продолжает вращаться, так что давление масла выдается на муфты трансмиссии.
Таким образом, муфта расцепления привода на ведущие колеса может проскальзывать во время процедуры останова двигателя, чтобы обеспечивать требуемое положение останова двигателя. В некоторых примерах, требуемое положение останова имеет место в тех случаях, когда поршень конкретного цилиндра останавливается в пределах заданного количества градусов до верхней мертвой точки такта сжатия цилиндра.
Способы и системы по фиг. 1-3 и 25-26 предусматривают способ останова двигателя, содержащий: регулирование скорости вращения встроенного в привод на ведущие колеса стартера/генератора (DISG) на требуемую скорость вращения, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии, в ответ на запрос остановить вращение двигателя; и осуществление проскальзывания муфты расцепления привода на ведущие колеса в приводе на ведущие колеса между DISG и двигателем, чтобы останавливать двигатель в требуемом положении. Способ включает в себя те случаи, когда требуемое положение является заданным количеством градусов угла поворота коленчатого вала до верхней мертвой точки такта сжатия выбранного цилиндра. Способ дополнительно содержит прекращение потока топлива и зажигания в цилиндры двигателя в ответ на запрос остановить вращение двигателя. Способ дополнительно содержит связывание выходного вала трансмиссии с картером трансмиссии в ответ на запрос остановить вращение двигателя.
В некоторых примерах, способ дополнительно содержит размыкание муфты расцепления привода на ведущие колеса при по существу нулевой скорости вращения двигателя. Способ также дополнительно содержит продолжение вращать DISG, в то время как двигатель находится на нулевой скорости вращения. Способ дополнительно содержит ввод в действие и вывод из работы DISG, в то время как скорость вращения двигателя является нулевым.
Способы и системы по фиг. 1-3 и 25-26 также предусматривают способ останова двигателя, содержащий: смыкание муфты расцепления привода на ведущие колеса в ответ на запрос остановить вращение двигателя; регулирование скорости вращения встроенного в привод на ведущие колеса стартера/генератора (DISG) на требуемый профиль скорости вращения двигателя, который замедляется до нулевой скорости вращения двигателя; и размыкание муфты расцепления привода на ведущие колеса на заданной скорости вращения двигателя. Способ дополнительно содержит связывание выходного вала трансмиссии с картером трансмиссии в ответ на запрос остановить двигатель. Способ дополнительно содержит прекращение потока топлива и зажигания в цилиндры двигателя в ответ на запрос остановить двигатель. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса расположена в приводе на ведущие колеса, между двигателем и DISG.
В некоторых примерах, способ дополнительно содержит размыкание муфты расцепления привода на ведущие колеса в заданном положении. Способ включает в себя те случаи, когда скорость вращения DISG повышается, когда скорость вращения двигателя меньше, чем требуемый профиль скорости вращения двигателя. Способ включает в себя те случаи, когда скорость вращения DISG снижается, когда скорость вращения двигателя больше, чем требуемый профиль скорости вращения двигателя.
Способы и системы по фиг. 1-3 и 25-26 предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, для регулирования работы муфты расцепления привода на ведущие колеса в ответ на запрос остановить вращение двигателя.
В некоторых примерах, система транспортного средства включает в себя те случаи, когда муфта расцепления привода на ведущие колеса смыкается по меньшей мере частично. Система транспортного средства включает в себя те случаи, когда муфта расцепления привода на ведущие колеса смыкается полностью. Система транспортного средства дополнительно содержит дополнительные команды для размыкания муфты расцепления привода на ведущие колеса при заданной скорости вращения. Система транспортного средства дополнительно содержит эксплуатацию DISG на скорости вращения, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии. Система транспортного средства дополнительно содержит дополнительные команды для избирательного вывода из работы DISG при нулевой скорости вращения двигателя.
Далее, со ссылкой на фиг. 27, показан способ для останова двигателя, когда транспортное средство, в котором работает двигатель, ставится на стоянку на меняющихся уклонах. Способ по фиг. 27 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
На 2702, способ 2700 оценивает, остановлено ли транспортное средство, в котором эксплуатируется двигатель. В одном из примеров, транспортное средство может определяться остановленным, когда скорость транспортного средства является нулевой. Если способ 2700 делает вывод, что транспортное средство остановлено, ответом является да, и способ 2700 переходит на 2704. Иначе, ответом является нет, и способ 2700 переходит на выход.
На 2704, способ 2700 оценивает, удовлетворены или нет условия останова двигателя. В одном из примеров, условия останова двигателя могут включать в себя, но не в качестве ограничения, крутящий момент требования водителя, являющийся меньшим, чем пороговый крутящий момент, скорость вращения двигателя, являющееся меньшим, чем пороговая скорость вращения, и нажатый тормоз транспортного средства. В других примерах, могут применяться другие условия останова двигателя. Если условия останова двигателя присутствуют, ответом является да, и способ 2700 переходит на 2706. Иначе, ответом является нет, и способ 2700 переходит на выход.
На 2706, способ 2700 оценивает уклон дороги и массу транспортного средства. В одном из примеров, уклон дороги может определяться посредством уклономера. Масса транспортного средства может определяться, как описано на 904 по фиг.9. Дополнительно, способ 2700 останавливает вращение двигателя. Способ 2700 переходит на 2708 после того, как определены масса транспортного средства и уклон дороги.
На 2708, способ 2700 оценивает, является или нет уклон дороги большим, чем первый пороговый уклон дороги. В одном из примеров, первый пороговый и другие пороговые уклоны дороги могут быть функцией массы транспортного средства. Например, если масса транспортного средства возрастает, первый пороговый уклон дороги может уменьшаться. Если способ 2700 делает вывод, что существующий уклон дороги больше, чем первый пороговый уклон дороги, ответом является да, и способ 2700 переходит на 2716. Иначе, ответом является нет, и способ 2700 переходит на 2710.
На 2710, способ 2700 поддерживает давление трансмиссионного масла, чтобы предоставлять возможность переключения передач трансмиссии, и осуществляет переключение с более низкой передачи (например, первой передачи) на более высокую передачу (например, вторую передачу), если трансмиссия еще не находится на второй передаче. Посредством переключения на более высокую передачу, масса транспортного средства фактически повышается на колесах транспортного средства, так что труднее перемещать транспортное средство. Давление трансмиссионного масла может поддерживаться посредство электрического масляного насоса. Способ 2700 переходит на 2712 после того, как переключена трансмиссия.
На 2712, способ 2700 оценивает, запрошены или нет разгон транспортного средства или повышенный запрос крутящего момента. В одном из примеров, повышенный запрос водителя определяется по положению педали акселератора. Если способ 2700 делает вывод, что запрошены разгон транспортного средства или повышенный запрос крутящего момента, ответом является да, и способ 2700 переходит на 2714. Иначе, способ 2700 возвращается на 2710.
На 2714, способ 2700 увеличивает крутящий момент, подаваемый в привод на ведущие колеса, и осуществляет переключение с понижением передачи трансмиссии на более низкую передачу (например, первую передачу) для разгона транспортного средства. Крутящий момент привода на ведущие колеса может повышаться посредством DISG или посредством двигателя после запуска двигателя. Двигатель может запускаться с помощью проворачивания коленчатого вала посредством DISG или стартера с более низкой выходной мощностью. Способ 2700 переходит на выход после того, как трансмиссия переключена на первую передачу, и увеличен крутящий момент по отношению к приводу на ведущие колеса.
На 2716, способ 2700 оценивает, является или нет уклон дороги большим, чем второй пороговый уклон дороги. Если способ 2700 делает вывод, что существующий уклон дороги больше, чем второй пороговый уклон дороги, ответом является да, и способ 2700 переходит на 2724. Иначе, ответом является нет, и способ 2700 переходит на 2718.
На 2718, способ 2700 поддерживает давление трансмиссионного масла, чтобы предоставлять возможность переключения передач трансмиссии, и осуществляет переключение на более высокую передачу, чем вторая передача (например, 3ья передача), если трансмиссия еще не находится на более высокой передаче. Посредством переключения на более высокую передачу, чем вторая передача, масса транспортного средства фактически повышается на колесах транспортного средства, так что труднее перемещать транспортное средство. Давление трансмиссионного масла может поддерживаться посредство электрического масляного насоса. Способ 2700 переходит на 2718 после того, как трансмиссия подвергнута включению понижающей передачи.
На 2720, способ 2700 оценивает, запрошены или нет разгон транспортного средства или повышенный запрос крутящего момента. В одном из примеров, повышенный запрос водителя определяется по положению педали акселератора. Если способ 2700 делает вывод, что запрошены разгон транспортного средства или повышенный запрос крутящего момента, ответом является да, и способ 2700 переходит на 2722. Иначе, способ 2700 возвращается на 2718.
На 2722, способ 2700 увеличивает крутящий момент, подаваемый в привод на ведущие колеса, и осуществляет переключение с понижением передачи трансмиссии на более первую передачу для разгона транспортного средства. Крутящий момент привода на ведущие колеса может повышаться посредством DISG или посредством двигателя после запуска двигателя. Двигатель может запускаться с помощью проворачивания коленчатого вала посредством DISG или стартера с более низкой выходной мощностью. Способ 2700 переходит на выход после того, как трансмиссия переключена на первую передачу, и в то время как, повышена величина крутящего момента, подаваемого в привод на ведущие колеса.
На 2724, способ 2700 применяет тормоза транспортного средства, поддерживает давление трансмиссионного масла, чтобы предоставлять возможность переключения передач трансмиссии, и осуществляет переключение на первую, если оно еще не находится на первой передаче. Посредством переключения на первую передачу и применения тормозов, транспортное средство может быть готовым разгоняться, будучи остановленным на уклоне. Кроме того, посредством не нажатия тормозов на более низких уклонах, износ тормозов может уменьшаться наряду с уменьшением перемещения транспортного средства. Давление трансмиссионного масла может поддерживаться посредство электрического масляного насоса. Способ 2700 переходит на 2726 после того, как нажаты тормоза транспортного средства.
На 2726, способ 2700 оценивает, запрошены или нет разгон транспортного средства или повышенный запрос крутящего момента. Если способ 2700 делает вывод, что запрошены разгон транспортного средства или повышенный запрос крутящего момента, ответом является да, и способ 2700 переходит на 2728. Иначе, способ 2700 возвращается на 2724.
На 2728, способ 2700 увеличивает крутящий момент, подаваемый в привод на ведущие колеса, и отпускает тормоза транспортного средства, так что транспортное средством может разгоняться. Крутящий момент привода на ведущие колеса может повышаться посредством DISG или посредством двигателя после запуска двигателя. Двигатель может запускаться с помощью проворачивания коленчатого вала посредством DISG или стартера с более низкой выходной мощностью. Способ 2700 переходит на выход после того, как тормоза транспортного средства отпущены.
Как описано в материалах настоящего описания, операция выключения или останова двигателя, такая как при остановке или стоянке транспортного средства, может использоваться для сбережения топлива. Во время такой операции, муфта расцепления привода на ведущие колеса может размыкаться. Поэтому, когда транспортное средство находится в состоянии покоя, возможно на уклоне вверх по склону, двигатель часто выключается, чтобы оставаться в состоянии покоя. Таким образом, альтернативный источник давления, иной чем двигатель, может использоваться для поддержания гидравлического давления трансмиссии, в то время как двигатель отключен. В некоторых примерах, электрический вспомогательный насос может использоваться для поддержания гидравлического давления трансмиссии. В других примерах, скорость вращения DISG не падает до нуля, когда транспортное средство останавливается, но удерживается на низкой скорости вращения, типично сильно ниже холостого хода (например, 200-500 оборотов в минуту), чтобы поддерживать гидравлическое давление трансмиссии. В этих условиях, крутящий момент на выходном валу гидротрансформатора является нулевым (так как является нулевой входная скорость вращения) или является значением, которое может не быть достаточным, чтобы предохранять транспортное средство от откатывания назад, когда отпущен тормоз. Один из подходов применяет колесные тормоза для предохранения транспортного средства от откатывания назад; однако, несмотря на то, что эффективно в некоторых случаях, это также может приводить к ухудшенным пусковым характеристикам транспортного средства или требовать датчика уклона.
Еще одна проблема может состоять в том, что, когда водитель выжимает тормозную педаль, может применяться одно или оба из тормозов транспортного средства и рекуперативного торможения на основании условий эксплуатации. Например, тормозной момент, вырабатываемый DISG во время рекуперативного торможения (с или без выключения двигателя и разомкнутой муфты расцепления привода на ведущие колеса), может уравновешиваться фрикционным моментом колесного тормоза для обеспечения требуемого темпа замедления, который соответствует нажатию тормозной педали. Поскольку, когда транспортное средство останавливается, рекуперативный тормозной момент ослабевает для выполнения функции удержания на возвышенности, большая часть фрикционного тормозного момента должна «резервироваться», таким образом, снижая преимущество рекуперативного торможения. Таким образом, альтернативные подходы удержания на возвышенности могут быть желательными, для того чтобы повышать способность использовать рекуперативное торможение.
В одном из примеров, основанная на гидротрансформаторе автоматическая трансмиссия может быть оборудована муфтой свободного хода. Таким образом, если давление трансмиссионного масла поддерживается, в то время как транспортное средство является неподвижным, и если трансмиссия удерживается на передаче (например, в противоположность нейтрали), то муфта свободного хода действует в качестве механического устройства удержания на возвышенности, чтобы предохранять транспортное средство от откатывания назад, когда транспортное средство находится на уклоне вверх по склону. Однако, в зависимости от массы транспортного средства и угла уклона, удерживание трансмиссии на более низкой передаче, например, первой передаче, может только замедлять откатывание транспортного средства назад, когда тормоз отпущен на более крутом уклоне, например, 6%. В этом примере, если трансмиссия находится на первое передаче, крутящий момент, который является функцией синуса угла уклона и массы транспортного средства, может быть достаточным для преодоления удерживающего крутящего момента муфты свободного хода. Таким образом, в одном из примеров, трансмиссия может удерживаться на передаче, которая находится выше, чем первая передача, если это требуется для предохранения транспортного средства от откатывания назад на максимальном по замыслу уклоне. Например, трансмиссия может переключаться на более высокую передачу перед остановкой, с тем чтобы быть способной к удержанию на возвышенности, к примеру, на основании оцененного уклона во время перемещения транспортного средства.
Выше заданного уклона, например, 6%, основанная на продольном датчике система выявления уклона может использоваться для определения уклона. Таким образом, в некоторых примерах, контроллер может определять, превышает ли текущий уклон верхнее предельное значение и, если так, тормозная система может применяться в дополнение, чтобы содействовать в операции удержания на возвышенности для предотвращения откатывания транспортного средства назад.
Для более тяжелых транспортных средств или транспортных средств, которые могут иметь более тяжелые нагрузки, таких как грузовой автомобиль на шасси легкового автомобиля, может быть полезным применять многочисленные муфты в трансмиссии, чтобы повышать максимальный крутящий момент удерживания трансмиссии. Посредством применения двух или более муфт, в то время как транспортное средство является неподвижным, вход трансмиссии «связывается» с корпусом трансмиссии. Этот подход также может использоваться в качестве части технологии пуска в ход транспортного средства с перезапуском двигателя, чтобы профилировать крутящий момент на выходном валу трансмиссии, в то время как транспортное средство срывается со стоянки. Поэтому, посредством поддержания гидравлического давления трансмиссии, в то время как транспортное средство остановлено, и применения муфт(ы) для удерживания передачи или для установки трансмиссии в связанное состояние, транспортное средство может предохраняться от откатывания назад, когда водитель отпускает тормоз.
Далее, со ссылкой на фиг. 28, показана последовательность для останова двигателя, когда транспортное средство, на котором работает двигатель, ставится на стоянку на уклоне, согласно способу по фиг. 27. Последовательность по фиг. 28 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 28 представляет собой скорость транспортного средства в зависимости от времени. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 28 представляет собой уклон дороги в зависимости от времени. Ось Y представляет уклон дороги, и уклон дороги возрастает в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 2802 представляет первый пороговый уклон. Горизонтальная линия 2804 представляет второй пороговый уклон, который больше, чем первый пороговый уклон.
Третий график сверху по фиг. 28 представляет собой передачу трансмиссии в зависимости от времени. Ось Y представляет передачу трансмиссии, и соответственные передачи трансмиссии идентифицированы вдоль оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 28 представляет собой состояние двигателя в зависимости от времени. Ось Y представляет состояние двигателя, и двигатель является работающим, когда кривая состояния двигателя находится на верхнем уровне. Двигатель остановлен, когда кривая состояния двигателя находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 28 представляет состояние тормозов транспортного средства (например, состояние фрикционных тормозов) в зависимости от времени. Ось Y представляет состояние тормозов транспортного средства, и тормоза транспортного средства нажаты, когда кривая состояния тормозов находится на верхнем уровне. Тормоза не нажаты, когда состояние тормозов находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Шестой график сверху по фиг. 28 представляет собой состояние тормозной педали транспортного средства в зависимости от времени. Ось Y представляет состояние тормозной педали транспортного средства, и тормозная педаль транспортного средства нажата, когда кривая состояния тормозной педали находится на верхнем уровне. Тормозная педаль не нажата, когда состояние тормозной педали находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T53 времени, скорость транспортного средства повышена, уклон дороги находится около нуля, а трансмиссия находится на 5ой передаче, указывая, что транспортное средство является осуществляющим крейсерское движение на скорости. Двигатель является работающим, и тормозная педаль и тормоза не нажаты.
Между моментом T53 времени и моментом T54 времени, транспортное средство замедляется и осуществляет переключение с понижением передачи, с 5ой передачи на 1ую передачу, в ответ на более низкий крутящий момент требования водителя (не показан). Тормоз транспортного средства нажимается, как и тормозная педаль. Незадолго до момента T54 времени, трансмиссия переключается на 2ую передачу в ответ на уклон дороги и запрос останова двигателя после того, как транспортное средство остановлено.
В момент T54времени, двигатель остановлен, и трансмиссия удерживается на 2ой передаче для увеличения эффективной массы транспортного средства в качестве представленной по отношению к колесам транспортного средства. Тормозная педаль и тормоза транспортного средства остаются нажатыми; однако, в некоторых примерах, после того, как транспортное средство остановлено, тормоза транспортного средства могут отпускаться, когда тормозная педаль нажата, после того, как трансмиссия переключена на более высокую передачу. Уклон дороги остается около нуля и ниже первого порогового значения 2802 уклона.
В момент T55времени, тормозная педаль отпускается водителем. Тормоза транспортного средства отпускаются в ответ на отпускание тормозной педали. Трансмиссия также подвергается переключению с понижением передачи на первую передачу, чтобы улучшать разгон транспортного средства, в ответ на отпускание водителем тормозов. Двигатель также запускается в ответ на отпускание водителем тормоза. Транспортное средство начинает разгоняться через короткое время после того, как отпущена тормозная педаль, в ответ на увеличение крутящего момента требования водителя.
Между моментом T55 времени и моментом T56 времени, транспортное средство разгоняется, а затем, замедляется в ответ на крутящий момент требования водителя и применение тормозной педали и тормозов, как указано состоянием тормозов и состоянием тормозной педали. Трансмиссия также переключается на с 1ой по 5ую передачу, пока транспортное средство является ускоряющимся и замедляющимся. Уклон дороги также возрастает, и больше, чем первый пороговый уклон 2802 дороги к моменту T56 времени. Тормозная педаль и тормоза нажимаются водителем для замедления транспортного средства.
В момент T56 времени, транспортное средство останавливается, и трансмиссия переключается с понижением передачи на 1ую передачу, как указано кривыми скорости транспортного средства и трансмиссии. Двигатель продолжает работать, когда транспортное средство останавливается.
В момент T57 времени, трансмиссия переключается с повышением передачи на 3ью передачу в ответ на уклон транспортного средства, являющийся большим, чем первый пороговый уклон 2802, и запрос остановить двигатель. Переключение трансмиссии повышает эффективную массу транспортного средства на колесах транспортного средства, так чтобы было труднее скатываться с увеличенного уклона. Двигатель останавливается вскоре после того, как трансмиссия переключена с повышением передачи. Тормозная педаль и тормоза транспортного средства остаются нажатыми водителем; однако, в некоторых примерах, после того, как транспортное средство остановлено, тормоза транспортного средства могут отпускаться, когда тормозная педаль нажата, после того, как трансмиссия переключена на более высокую передачу.
В момент Т58времени, водитель отпускает тормозную педаль, и тормоза отпускаются в ответ на отпускание тормозной педали. Трансмиссия переключается с понижением передачи с 3ей передачи на 1ую передачу, и двигатель запускается, как указано переходом состояния двигателя. Тормоза и двигатель изменяют состояние в ответ на отпускание тормозной педали. Транспортное средство начинает разгоняться вскоре после того, как отпущена тормозная педаль, в ответ на увеличение крутящего момента требования водителя (не показан).
Между моментом T58 времени и моментом T59 времени, транспортное средство разгоняется, а затем, замедляется в ответ на крутящий момент требования водителя и на применение тормозной педали и тормозов, как указано состоянием тормозов и состоянием тормозной педали. Трансмиссия также переключается на с 1ой по 5ую передачу, пока транспортное средство является ускоряющимся и замедляющимся. Уклон дороги также возрастает, и больше, чем второй пороговый уклон 2804 дороги к моменту T59 времени. Тормозная педаль и тормоза нажимаются водителем для замедления транспортного средства. Транспортное средство останавливается перед моментом T59 времени.
В момент T59 времени, двигатель останавливается, и тормоза транспортного средства нажимаются в ответ на тормозную педаль, низкий крутящий момент требования водителя и уклон дороги, являющийся большим, чем пороговый уклон 2804 дороги. Кривая тормозной педали и кривая состояния тормозов находятся на верхних уровнях, чтобы указывать, что нажаты как тормоза, так и тормозная педаль.
В момент Т60времени, водитель отпускает тормозную педаль, и двигатель запускается в ответ на отпущенную тормозную педаль. Состояние тормозов остается на верхнем уровне, чтобы указывать, что тормоза нажаты. Тормоза остаются нажатыми в ответ на уклон дороги, являющийся большим, чем второе пороговое значение 2804 уклона дороги, и крутящий момент требования водителя, являющийся меньшим, чем пороговый крутящий момент (не показан). Транспортное средство является неподвижным, как указано кривой скорости транспортного средства, находящейся на нуле.
В момент Т61времени, крутящий момент требования водителя возрастает (не показано), и тормоза транспортного средства отпускаются в ответ на повышенный крутящий момент требования водителя. Транспортное средство также начинает разгоняться в ответ на повышенный крутящий момент требования водителя, как указано возрастающей скоростью транспортного средства.
Таким образом, транспортное средство и привод на ведущие колеса могут реагировать на изменение уклона транспортного средства, так что транспортное средство остается по существу неподвижным, когда двигатель остановлен, в то время как транспортное средство находится на уклоне. В то время как транспортное средство останавливается на увеличивающихся уклонах, уменьшающие перемещение меры постепенно увеличиваются.
Способы и системы по фиг. 1-3 и 27-28 предусматривают способ остановки транспортного средства, содержащий: включение повышающей передачи трансмиссии на некоторую передачу в ответ на уклон дороги, когда транспортное средство является неподвижным; и автоматический останов двигателя транспортного средства в ответ на условия транспортного средства. Способ включает в себя те случаи, когда передаточное число возрастает по мере того, как увеличивается уклон дороги. Способ включает в себя те случаи, когда автоматический останов двигателя включает в себя останов двигателя в ответ на низкий крутящий момент требования водителя. Способ включает в себя те случаи, когда автоматический останов двигателя дополнительно включает в себя останов двигателя в ответ на скорость транспортного средства. Способ включает в себя те случаи, когда автоматический останов двигателя включает в себя останов двигателя в ответ на состояние тормозной педали транспортного средства. Способ включает в себя те случаи, когда трансмиссия переключается без водительского запроса переключения, и где трансмиссия является автоматической трансмиссией. Способ дополнительно содержит переключение с понижением передачи трансмиссии в ответ на увеличивающийся крутящий момент требования водителя после включения повышающей передачи трансмиссии.
Способы и системы по фиг. 1-3 и 27-28 также предусматривают способ остановки транспортного средства, содержащий: во время первого условия, включение повышающей передачи трансмиссии на первое передаточное отношение в ответ на первый уклон дороги, когда транспортное средство является неподвижным; во время второго условия, включение повышающей передачи трансмиссии на второе передаточное отношение в ответ на второй уклон дороги, когда транспортное средство является неподвижным; и автоматический останов двигателя в ответ на условия транспортного средства. Способ включает в себя те случаи, когда первое передаточное отношение является более низким передаточным отношением, чем второе передаточное отношение, и где трансмиссия не находится на первой передаче, когда трансмиссия переключается на первое передаточное отношение. Способ дополнительно содержит переключение с понижением передачи трансмиссии в ответ на увеличивающийся крутящий момент требования водителя после включения повышающей передачи трансмиссии во время первых и вторых условий.
В некоторых примерах, способ включает в себя те случаи, когда второй уклон дороги больше, чем первый уклон дороги. Способ дополнительно содержит поддержание давление трансмиссионного масла наряду с переключением трансмиссии. Способ включает в себя те случаи, когда двигатель останавливается до того, как переключена трансмиссия, и где давление трансмиссионного масла поддерживается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ дополнительно содержит выбор первого передаточного отношения и второго передаточного отношения в ответ на массу транспортного средства.
Способы и системы по фиг. 1-3 и 27-28 предусматривают систему транспортного средства, содержащую: двигатель; трансмиссию в избирательной механической связи с двигателем; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти для переключения трансмиссии на передачу в ответ на уклон дороги, в то время как транспортное средство, в котором работает двигатель, является неподвижным, контроллер также включает в себя команды для применения тормозов транспортного средства в ответ на уклон дороги. Система транспортного средства включает в себя те случаи, когда двигатель останавливается до того, как переключена трансмиссия, и где давление трансмиссионного масла поддерживается посредством встроенного в привод на ведущие колеса стартера/генератора. Система транспортного средства дополнительно содержит дополнительные команды для выбора первого передаточного отношения и второго передаточного отношения в ответ на массу транспортного средства.
В некоторых примерах, система транспортного средства дополнительно содержит дополнительные команды для включения понижающей передачи трансмиссии в ответ на увеличение крутящего момента требования водителя после того, как транспортное средство неподвижно. Система транспортного средства дополнительно содержит дополнительные команды для отпускания тормозов транспортного средства в ответ на увеличение крутящего момента требования водителя после того, как транспортное средство неподвижно. Система транспортного средства включает в себя те случаи, когда трансмиссия является автоматической трансмиссией.
Далее, со ссылкой на фиг. 29A и 29B, показана блок-схема последовательности операций способа для обеспечения торможения транспортного средства посредством привода на ведущие колеса транспортного средства. Способ по фиг. 29A и 29B может храниться в качестве выполняемых команд в постоянной памяти в системе по фиг. 1-3.
На 2902, способ 2900 определял условия эксплуатации. Условия эксплуатации двигателя могут включать в себя, но не в качестве ограничения, скорость транспортного средства, скорость вращения двигателя, положение тормозной педали, требуемый крутящий момент привода на ведущие колеса, скорость вращения DISG и состояние заряда аккумуляторной батареи. Способ 2900 переходит на 2904 после того, как определены условия эксплуатации.
На 2904, способ 2900 оценивает, присутствуют или нет условия для автоматического останова двигателя. Двигатель может автоматически останавливаться в ответ на условия транспортного средства, а не в ответ на устройство ввода, которое имеет единственную функцию запуска и/или останова вращения двигателя (например, двухпозиционный кнопочный переключатель). Например, когда водитель поворачивает ключ останова двигателя у двигателя, двигатель не останавливается автоматически. Однако, если водитель отпускает педаль акселератора, которая имеет функцию подачи потребления крутящего момента привода на ведущие колеса, двигатель может автоматически останавливаться в ответ на низкое потребление крутящего момента. Если способ 2900 делает вывод, что присутствуют условия для автоматического останова двигателя, ответом является да, и способ 2900 переходит на 2906. Иначе, ответом является нет, и способ 2900 переходит на выход.
На 2906, способ 2900 оценивает, запрошено или нет торможение транспортного средства приводом на ведущие колеса. Торможение транспортного средства приводом на ведущие колеса может запрашиваться во время замедления транспортного средства, чтобы снижать величину колесного торможения, используемого для замедления транспортного средства. Например, торможение приводом на ведущие колеса посредством двигателя или DISG может обеспечиваться, когда транспортное средство является спускающимся с возвышенности, так что меньшая величина колесного торможения может использоваться для замедления транспортного средства. В одном из примеров, способ 2900 может делать вывод, что торможение приводом на ведущие колеса запрашивается, когда транспортное средство является ускоряющимся, и присутствует низкий запрос крутящего момента привода на ведущие колеса. Если способ 2900 делает вывод, что запрошено торможение приводом на ведущие колеса, ответом является да, и способ 2900 переходит на 2910. Иначе, ответом является нет, и способ 2900 переходит на 2908.
На 2908, способ 2900 подает требуемый крутящий момент в привод на ведущие колеса посредством DISG и/или двигателя. Положительный крутящий момент двигателя может подаваться двигателем, сжигающим топливно-воздушную смесь и вращающим привод на ведущие колеса. DISG может обеспечивать крутящий момент в ответ на величину тока, втекающего в DISG. Способ 2900 переходит на выход после того, как требуемый крутящий момент подается в привод на ведущие колеса.
На 2910, способ 2900 оценивает, обладает или нет DISG несущей способностью для обеспечения требуемой величины торможения транспортного средства без двигателя. В одном из примеров, способ 2900 оценивает, обладает или нет DISG несущей способностью для обеспечения требуемой величины торможения транспортного средства без торможения двигателем, в ответ скорость транспортного средства, выбранную передачу трансмиссии и поглощающую способность по крутящему моменту DISG. В частности, таблица, описывающая определенную опытным путем поглощающую способность по крутящему моменту DISG, индексируется посредством скорости вращения DISG, которая определяется по скорости транспортного средства и выбранной передаче. Если способ 2900 делает вывод, что DISG обладает способностью для обеспечения требуемой величины торможения приводом на ведущие колеса без двигателя, обеспечивающего торможение, ответом является да, и способ 2900 переходит на 2916. Иначе, ответом является нет, и способ 2900 переходит на 2912.
На 2912, способ 2900 вращает двигатель без выдачи топлива в двигатель, и потери вращения двигателя повышаются, так что может увеличиваться торможение приводом на ведущие колеса. Потери вращения двигателя могут повышаться регулированием установки фаз клапанного распределения. В одном из примеров, впускные клапаны открываются около верхней мертвой точки такта впуска, а выпускные клапаны открываются рано в такте выпуска (например, раньше 90 градусов угла поворота коленчатого вала после верхней мертвой точки такта сжатия), чтобы увеличивать потери вращения двигателя и усиливать торможение приводом на ведущие колеса. Двигатель вращается посредством смыкания муфты расцепления привода на ведущие колеса, которая присоединяет двигатель к оставшейся части привода на ведущие колеса, как показано на фиг. 1-3. Способ 2900 переходит на 2914 после того, как двигатель вращается, и потери вращения двигателя увеличены.
На 2914, способ 2900 преобразует кинетическую энергию транспортного средства в электрическую энергию. В частности, DISG вводится в режим генератора, где энергия вращения из колес транспортного средства преобразуется в электрическую энергию и накапливается в аккумуляторной батарее или другом устройстве накопления энергии. В одном из примеров, энергия вращения, выдаваемая приводом на ведущие колеса с колес транспортного средства, через трансмиссию, через гидротрансформатор и на DISG, преобразуется в электрическую энергию, вырабатывая электрический ток внутри статора. Электрическая энергия затем может накапливаться в устройстве накопления энергии. Способ 2900 возвращается на 2906 после того, как кинетическая энергия транспортного средства начинает преобразовываться в электрическую энергию.
На 2916, способ 2900 оценивает, является или нет SOC устройства накопления энергии большим, чем пороговая величина заряда. В одном из примеров, SOC может оцениваться на основании напряжения на устройстве накопления энергии. Если способ 2900 делает вывод, что SOC устройства накопления энергии больше, чем пороговая величина, ответом является да, и способ 2900 переходит на 2930. Иначе, ответом является нет, и способ 2900 переходит на 2918.
Дополнительно, на 2916, способ 2900 может переходить на 2930, когда водитель запрашивает повышенное торможение приводом на ведущие колеса. Например, если водитель нажимает клавишу, чтобы войти в режим спуска с возвышенности, способ 2900 переходит на 2930, чтобы увеличить торможение приводом на ведущие колеса.
На 2918, способ 2900 переводит DISG в режим управления скоростью вращения из режима регулирования крутящего момента. В режиме управления скоростью вращения, выходной крутящий момент DISG регулируется в ответ на скорость вращения DISG, так чтобы скорость вращения DISG стремилась к требуемой скорости вращения DISG. В одном из примеров, крутящий момент DISG повышается, когда скорость вращения DISG меньше, чем фактическая скорость вращения DISG. Подобным образом, крутящий момент DISG снижается, когда скорость вращения DISG является большей, чем фактическая скорость вращения DISG. DISG приводится в действие в режиме управления скоростью вращения, так что DISG может реагировать на отклонения скорости вращения привода на ведущие колеса, вызванные изменениями крутящего момента. Как результат, насосное колесо гидротрансформатора может вращаться с требуемой постоянной частотой вращения во время переключений муфты расцепления привода на ведущие колеса, так что крутящий момент, передаваемый через гидротрансформатор, является в большей степени неизменным. Таким образом, DISG уменьшает возмущения крутящего момента привода на ведущие колеса, которые могут вызываться размыканием муфты расцепления привода на ведущие колеса. Способ 2900 переходит на 2920 после того, как DISG устанавливается в режим управления скоростью вращения.
На 2920, способ 2900 останавливает вращение двигателя, размыкая или расцепляя муфту расцепления привода на ведущие колеса и останавливая поток топлива в цилиндры двигателя. Муфта расцепления привода на ведущие колеса может размыкаться до того, как прекращается поток топлива в цилиндры двигателя, так что не осуществляющий сгорание двигатель не снижает скорость вращения и крутящий момент привода на ведущие колеса на насосном колесе гидротрансформатора. Способ 2900 переходит на 2922 после того, как вращение двигателя остановлено, и муфта расцепления привода на ведущие колеса начинает размыкаться.
На 2922, способ 2900 регулирует несущую способность по крутящему моменту муфты гидротрансформатора (TCC) для подавления возмущений размыкания муфты расцепления привода на ведущие колеса. Когда режим привода на ведущие колеса переключен в режим рекуперации энергии, и муфта расцепления привода на ведущие колеса начинает размыкаться, и мгновенная скорость вращения насосного колеса может меняться, так как изменяется величина крутящего момента, передаваемого с двигателя в привод на ведущие колеса. В одном из примеров, несущая способность по крутящему моменту TCC модулируется и регулируется, чтобы получать плавные переходы между изменениями состояния муфты расцепления привода на ведущие колеса. По существу может поддерживаться в большей степени согласованная скорость транспортного средства, когда размыкается муфта расцепления привода на ведущие колеса. Например, если скорость вращения насосного колеса гидротрансформатора начинает уменьшаться, когда муфта расцепления размыкается, TCC может регулироваться, чтобы проскальзывать с повышенной величиной. Способ 2900 переходит на 2924 после того, как отрегулирована TCC.
На 2924, способ 2900 преобразует кинетическую энергию транспортного средства в электрическую энергию, как описано на 2914. Электрическая энергия направляется в устройство накопления преобразования электрической энергии, где она удерживается и может использоваться в более позднее время. Устройство преобразования электрической энергии может быть аккумуляторной батареей или конденсатором. Способ 2900 переходит на 2926 после того, как начинается преобразование кинетической энергии транспортного средства в электрическую энергию.
На 2926, способ 2900 переходит в режим регулирования крутящего момента после того, как были смягчены любые возмущения от размыкания муфты расцепления привода на ведущие колеса. Способ 2900 также регулирует DISG, чтобы обеспечивать отрицательный крутящий момент величиной, которая равна той, которую двигатель выдает во время замедления с перекрытым топливом.
Величина тормозного момента, который может обеспечивать двигатель, может определяться опытным путем и сохраняться в памяти. Величина торможения двигателем может включать в себя регулирования для установки фаз клапанного распределения, температуры моторного масла, скорости вращения двигателя, положения дросселя и барометрического давления. Регулирования могут добавляться к базовому тормозному моменту двигателя, который характеризован при номинальных установках фаз клапанного распределения, температуре двигателя, скорости вращения двигателя, положении дросселя и барометрическом давлении. Например, тормозной момент двигателя может определяться при температуре моторного масла в 90°C, скорости вращения двигателя в 1500 оборотов в минуту, базовой установке фаз клапанного распределения, закрытом дросселе и барометрическом давлении 100 кПа. Тормозной момент двигателя может регулироваться от базового тормозного момента, по мере того, как условия эксплуатации отклоняются от базовых условий.
Текущие условия эксплуатации двигателя (например, температура масла, установка клапанного распределения, и т. д.) определяются и являются основой для индексации определенных опытным путем таблиц и/или функций, которые выводят тормозной момент двигателя в текущих условиях эксплуатации. Как только тормозной момент двигателя в текущих условиях эксплуатации определен, крутящий момент DISG регулируется на тормозной момент двигателя. Посредством регулирования крутящего момента DISG на тормозной момент двигателя, может быть возможным переходить с выдачи тормозного момента с использованием DISG на обеспечение тормозного момента посредством двигателя без DISG, выдающего тормозной момент, когда SOC устройства преобразования энергии больше, чем пороговое значение.
Условия двигателя могут непрерывно контролироваться, так что отрицательный или рекуперативный крутящий момент DISG может исправляться по мере того, как изменяются условия эксплуатации двигателя. Например, если температура моторного масла снижается, и трение в двигателе возрастает, отрицательный крутящий момент DISG, который имитирует тормозной момент двигателя, когда прекращен поток топлива в двигатель, может увеличиваться, чтобы отражать изменение тормозного момента двигателя. Способ 2900 переходит на 2928 после того, как отрицательный крутящий момент DISG отрегулирован на тормозной момент двигателя, когда двигатель вращается без подачи топлива в двигатель, и когда нет сгорания в двигателе.
На 2928, способ 2900 автоматически вводит в действие и повышает выбранные электрические нагрузки транспортного средства, чтобы продлевать время, которое DISG может продолжать обеспечивать тормозной момент. Например, если транспортное средство съезжает с возвышенности в течение увеличенной длительности, устройство накопления энергии может становиться полностью заряженным, так что оно может не принимать дополнительный заряд. Во время таких условий, DISG может прекращать выдачу заряда в устройство накопления энергии, чтобы уменьшать вероятность ухудшения характеристик устройства накопления энергии. Однако, может быть возможным, чтобы DISG продолжал обеспечивать заряд в устройство накопления энергии, если дополнительный заряд выдается в системы транспортного средства, так чтобы заряд устройства накопления энергии не увеличивался.
В одном из примеров, ток, подаваемый в выбранные системы с электроприводом транспортного средства, повышается, когда состояние заряда устройства накопления энергии больше, чем пороговый уровень. В других примерах, ток, подаваемый в выбранные системы с электрическим приводом транспортного средства, повышается, когда заряд, выдаваемый DISG в аккумуляторную батарею, больше, чем пороговая величина тока заряда. В некоторых примерах, когда состояние заряда устройства накопления энергии больше, чем пороговый уровень, двигатель вращается, DISG прекращает работать в режиме рекуперации, ток подаваемый в выбранные системы с электроприводом транспортного средства, продолжается до тех пор, пока заряд устройства накопления энергии не снижается до второго порогового уровня, и тогда, DISG возвращается в режим рекуперации. Двигатель прекращает вращение, когда заряд устройства накопления энергии меньше, чем пороговый уровень.
Выбранные системы с электроприводом транспортного средства могут автоматически вводиться в действие и включаться или питаться большим током, чем требуется. Выбранные системы с электроприводом транспортного средства могут включать в себя, но не в качестве ограничения, устройства оттаивания переднего и заднего ветровых стекол, нагревательные устройства последующей очистки выхлопных газов, электрические насосы и фары. Например, оттаиватели переднего и заднего ветровых стекол могут вводиться в действие без извещения водителя, так чтобы водитель мог быть не знающим, что электроэнергия потребляется для удлинения работы DISG в режиме рекуперации. Кроме того, отдача электрического насоса (например, топливного насоса) может повышаться посредством увеличения тока насоса без извещения водителя. Подобным образом, нагреватели системы выпуска и фары транспортного средства могут вводиться в действие, чтобы продлевать работу DISG в режиме рекуперации. Способ 2900 возвращается на 2906 после того, как отрегулированы электрические нагрузки.
На 2930, способ 2900 повышает проскальзывание на муфте гидротрансформатора (TCC), если TCC заблокирована. Если TCC является проскальзывающей, проскальзывание на TCC дополнительно увеличивается. Проскальзывание TCC снижает возмущения крутящего момента, которые могут привноситься в привод на ведущие колеса посредством соединения и разъединения муфты расцепления привода на ведущие колеса. В одном из примеров, TCC устанавливается в режим регулирования проскальзывания на 2934, и TCC модулируется в ответ на изменения скорости вращения насосного колеса гидротрансформатора. Способ 2900 переходит на 2932 после того, как отрегулировано проскальзывание на TCC.
На 2932, способ 2900 устанавливает DISG в режим управления скоростью вращения после выхода из режима регулирования крутящего момента и регулирует крутящий момент DISG, чтобы поддерживать скорость вращения DISG на по существу постоянном значении (например, ±50 оборотов в минуту командной скорости вращения DISG). В одном из примеров, скорость вращения DISG сравнивается с требуемой частотой вращения DISG, и ток, подаваемый на DISG, регулируется в ответ на разность скорости вращения DISG и требуемой скорости вращения DISG. Если скорость вращения DISG меньше, чем требуемая скорость вращения DISG, дополнительный ток подается на DISG для увеличения крутящего момента и скорости вращения DISG. Если скорость вращения DISG является большей, чем требуемая скорость вращения DISG, ток, подаваемый в DISG снижается для уменьшения скорости вращения и крутящего момента DISG, подаваемых в привод на ведущие колеса. Установка DISG в режим управления скоростью вращения предоставляет DISG возможность управлять крутящим моментом привода на ведущие колеса, не вызывая изменений скорости вращения привода на ведущие колеса, которые могут быть нежелательными для водителя. Способ 2900 переходит на 2934 после того, как DISG устанавливается в режим управления скоростью вращения.
На 2934, способ 2900 устанавливает несущую способность TCC в постоянное значение или переводит на новое значение коэффициента усиления управления для регулирования проскальзывания TCC с замкнутым контуром. Например, сигнал, управляющий величиной крутящего момента, который передает TCC через гидротрансформатор, регулируется по мере того, как изменяется скорость вращения насосного колеса гидротрансформатора, для уменьшения возмущений привода на ведущие колеса. В одном из примеров, величина проскальзывания TCC регулируется согласно передаточной функции TCC, которая выводит рабочий цикл сигнала управления TCC. Передаточная функция TCC индексируется на основании скорости вращения насосного колеса гидротрансформатора и скорости вращения турбины гидротрансформатора. Способ 2900 переходит на 2936 после того, как отрегулирована несущая способность TCC.
На 2936, способ 2900 оценивает, присутствует или нет стартер, иной чем DISG. В некоторых вариантах осуществления, если стартера, иного чем DISG, нет в распоряжении, или находится в состоянии с ухудшенными рабочими характеристиками, способ 2900 может оценивать стартер не DISG в качестве отсутствующего. Если способ 2900 делает вывод, что стартер, иной чем DISG, не присутствует, ответом является нет, и способ 2900 переходит на 2950. Иначе, ответом является да, и способ 2900 переходит на 2938.
На 2950, способ 2900 по меньшей мере частично смыкает муфту расцепления привода на ведущие колеса, в то время как DISG находится в режиме управления скоростью вращения, чтобы вращать двигатель. В одном из примеров, муфта расцепления привода на ведущие колеса смыкается в положение, которое обеспечивает требуемую скорость вращения проворачивания коленчатого вала двигателя (например, 250 оборотов в минуту). Требуемая скорость вращения проворачивания коленчатого вала может меняться в зависимости от условий эксплуатации и может быть таким же высоким, как скорость вращения DISG, в некоторых вариантах осуществления. Смыкание муфты расцепления привода на ведущие колеса заставляет крутящий момент привода на ведущие колеса передаваться на двигатель. Таким образом, ток, подаваемый на DISG, может повышаться, когда муфта расцепления привода на ведущие колеса вводится в зацепление, с тем чтобы поддерживать скорость вращения DISG. Таким образом, крутящий момент, передаваемый через гидротрансформатор, может поддерживаться на постоянном уровне, поскольку постоянна скорость вращения насосного колеса гидротрансформатора. Способ 2900 переходит на 2952 после того, как муфта расцепления привода на ведущие колеса по меньшей мере частично сомкнута.
На 2952, способ 2900 выдает искру и топливо в цилиндры двигателя для запуска двигателя. В одном из примеров, топливо выдается в цилиндры двигателя через топливные форсунки непосредственного впрыска. Способ 2900 переходит на 2954 после того, как искра и топливо подаются в цилиндры двигателя.
На 2954, способ 2900 оценивает, происходит или нет сгорание в цилиндрах двигателя. В одном из примеров, способ 2900 делает вывод, что сгорание присутствует в цилиндрах двигателя, когда выходной крутящий момент двигателя возрастает. Увеличение скорости вращения двигателя может служить признаком сгорания в цилиндрах двигателя. В одном из примеров, сгорание в цилиндрах двигателя может определяться с помощью датчиков давления в цилиндрах. Если способ 2900 определяет, что сгорание присутствует в цилиндрах двигателя, ответом является да, и способ 2900 переходит на 2956. Иначе, ответом является нет, и способ 2900 возвращается на 2954.
На 2956, способ 2900 размыкает муфту расцепления привода на ведущие колеса и регулирует крутящий момент DISG. Размыкание муфты расцепления привода на ведущие колеса может снижать величину крутящего момента, передаваемого с DISG и привода на ведущие колеса для запуска двигателя, когда муфта расцепления привода на ведущие колеса расцеплена перед тем, как двигатель начинает вырабатывать больший крутящий момент для разгона двигателя до скорости вращения DISG. Размыкание муфты расцепления привода на ведущие колеса также снижает величину крутящего момента, выдаваемого приводом на ведущие колеса, для разгона двигателя. Поэтому, крутящий момент DISG может снижаться, чтобы поддерживать DISG на постоянной скорости вращения, когда отпускается муфта расцепления привода на ведущие колеса. В примерах, где кинетическая энергия транспортного средства является вращающей DISG, может регулироваться величина крутящего момента, поглощаемого DISG. Способ 2900 переходит на 2940 после того, как муфта расцепления привода на ведущие колеса разомкнута.
На 2938, способ 2900 вращает двигатель посредством стартера, иного чем DISG. В одном из примеров, стартер имеет более низкую выходную мощность, чем DISG, и стартер избирательно входит в зацепление маховика с коленчатым валом двигателя. Стартер выдает скорость вращения коленчатого вала двигателя, меньшее, чем 250 оборотов в минуту. Искра и топливо также выдаются в двигатель на 2938. Способ 2900 переходит на 2940 после того, как двигатель начинает вращаться.
На 2940, способ 2900 разгоняет скорость вращения двигателя до скорости вращения, синхронной с DISG. Двигатель разгоняется посредством регулирования топливоснабжения, искрового зажигания и количества воздуха в цилиндре у цилиндров двигателя. Способ 2900 переходит на 2942 после того, как скорость вращения двигателя достигает скорости вращения DISG.
На 2942, способ 2900 удерживает скорость вращения двигателя на скорости вращения DISG и выдает по существу нулевой эффективный крутящий момент (например, ±10∙Н) вне коленчатого вала двигателя. Другими словами, крутящий момент двигателя регулируется как раз достаточно высоким, чтобы преодолевать потери двигателя и вращать двигатель на скорости вращения DISG. Способ 2900 переходит на 2944 после того, как эффективный крутящий момент двигателя является по существу нулевым.
На 2944, способ 2900 смыкает муфту расцепления привода на ведущие колеса. По существу никакой крутящий момент не передается между приводом на ведущие колеса и двигатель, когда муфта расцепления привода на ведущие колеса смыкается, так что обеспечивается плавный переход между неработающим двигателем и работающим двигателем. Двигатель приводится в действие по существу на скорости вращения DISG (например, ±25 оборотов в минуту), когда муфта расцепления привода на ведущие колеса сомкнута. Способ 2900 переходит на 2946 после того, как муфта расцепления привода на ведущие колеса сомкнута.
На 2946, способ 2900 постепенно снижает крутящий момент сгорания в двигателе (например, крутящий момент двигателя, обеспечиваемый сгоранием), а затем, прекращается впрыск топлива, так что двигатель не является вращающимся под своей собственной мощностью. Крутящий момент на выходном валу двигателя постепенно снижается посредством уменьшения количеств воздуха в цилиндрах и количеств топлива в цилиндрах. Кроме того, потери вращения двигателя увеличиваются посредством установки фаз клапанного распределения двигателя. Например, впускные клапаны цилиндра могут открываться возле верхней мертвой точки такта впуска, а выпускные клапаны цилиндра могут открываться между верхней мертвой точкой такта сжатия и 45 градусами угла поворота коленчатого вала после верхней мертвой точки такта сжатия, чтобы повышать потери вращения двигателя. Клапаны других цилиндров двигателя могут приводиться в действие подобным образом. Отрицательный крутящий момент, вырабатываемый DISG во время рекуперации, может снижаться, чтобы сглаживать переход от двигателя, выдающего крутящий момент сгорания, и двигателем, обеспечивающим тормозной момент во время перекрытия топлива. Кроме того, отрицательный крутящий момент DISG может регулироваться, чтобы поддерживать постоянную скорость вращения насосного колеса гидротрансформатора, пока DISG является преобразующим кинетическую энергию в электрическую энергию. Таким образом, вращающийся двигатель может повышать нагрузку, прикладываемую к приводу на ведущие колеса, для обеспечения требуемой величины торможения приводом на ведущие колеса по отношению к транспортному средству. Способ 2900 переходит на 2948 после того, как постепенно снижается крутящий момент сгорания в двигателе.
В одном из примеров, величина рекуперативного крутящего момента, запрошенного DISG, должна быть совместимой с величиной крутящего момента торможения двигателем, которая имеется в распоряжении на данный момент, как описано на 2926. Крутящий момент торможения двигателем может оцениваться на основании температуры моторного масла, трения и прокачки двигателя на текущей скорости вращения насосного колеса. Как только система перестраивается для торможения двигателем, фактическое торможение двигателем может сравниваться с оцененным торможением двигателем, и коррекция производится в отношении оценки. Таким образом, транспортное средство может замедляться с одним и тем же темпом как для торможения двигателем, так и рекуперативного торможения, когда тормозная педаль не нажимается.
На 2948, способ 2900 удерживает крутящий момент DISG по существу постоянным и возвращает TCC к регулированию проскальзывания с замкнутым контуром. Например, командный сигнал TCC может регулироваться для обеспечения требуемой разности скоростей вращения между насосным колесом гидротрансформатора и турбиной гидротрансформатора. Способ 2900 возвращается на 2906 после того, как TCC возвращена в режим регулирования проскальзывания с замкнутым контуром.
В альтернативном примере, может начинаться вращение двигателя, и двигателю может быть отказано в топливе и искре, в то время как двигатель раскручивается до скорости вращения DISG. Муфта расцепления привода на ведущие колеса изначально смыкается на небольшую величину, и более высокий уровень проскальзывания присутствует на муфте расцепления привода на ведущие колеса. DISG может переводиться из состояния генератора в состояние электродвигателя для снижения любых возмущений крутящего момента привода на ведущие колеса по мере того, как разгоняющийся двигатель выдает дополнительный отрицательный крутящий момент в привод на ведущие колеса. Дополнительное давление прикладывается к муфте расцепления привода на ведущие колеса, чтобы повышать отрицательный крутящий момент, выдаваемый двигателем в привод на ведущие колеса. Крутящий момент DISG регулируется, в то время как DISG находится в режиме управления скоростью вращения, для обеспечения требуемого уровня торможения приводом на ведущие колеса. В одном из примеров, ток DISG регулируется, чтобы обеспечивать требуемый темп замедления транспортного средства.
В еще одном примере, 2936-2956 могут быть замещены этапом, где двигатель пребывает на нулевом вращении, в то время как торможение транспортного средства с помощью фрикционных тормозов (например, колесных тормозов) увеличивается без водительского ввода наряду с тем, что поглощение крутящего момента DISG снижается (например, с преобразованием механической энергии вращения в электрическую энергию). Сила фрикционного торможения может повышаться пропорционально снижению торможения приводом на ведущие колеса DISG. Таким образом, тормоза транспортного средства применяются автоматически, в то время как снижается торможение приводом на ведущие колеса, обеспечиваемое посредством DISG.
Таким образом, способ по фиг. 29A-B обеспечивает торможение приводом на ведущие колеса, так чтобы топливо могло сберегаться посредством преобразования кинетической энергии в электрическую энергию. Кроме того, способ может уменьшать возмущения крутящего момента привода на ведущие колеса посредством управления DISG, TCC и другими компонентами привода на ведущие колеса.
Далее, со ссылкой на фиг. 30, показана примерная последовательность для обеспечения торможения транспортного средства посредством привода на ведущие колеса согласно способу по фиг. 29A-B. Последовательность по фиг. 30 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 30 представляет скорость вращения турбины гидротрансформатора в зависимости от времени. Ось Y представляет скорость вращения турбины гидротрансформатора, и скорость вращения турбины гидротрансформатора возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 30 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график по фиг. 30 представляет силу прижатия муфты гидротрансформатора (TCC) в зависимости от времени. Ось Y представляет силу прижатия TCC, и сила прижатия TCC возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 30 представляет крутящий момент муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет крутящий момент муфты расцепления привода на ведущие колеса, и крутящий момент муфты расцепления привода на ведущие колеса возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 30 представляет собой крутящий момент на выходном валу DISG в зависимости от времени. Ось Y представляет крутящий момент на выходном валу DISG, и крутящий момент на выходном валу DISG возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Шестой график сверху по фиг. 30 представляет крутящий момент двигателя в зависимости от времени. Ось Y представляет крутящий момент двигателя, и крутящий момент двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T62 времени, двигатель остановлен, скорость вращения турбины повышена, и DISG является выдающим отрицательный (например, тормозной) момент в привод на ведущие колеса. Муфта TCC блокирована, и муфта расцепления привода на ведущие колеса разомкнута и не является передающей крутящий момент.
В момент T63 времени, проскальзывание муфты гидротрансформатора увеличивается в ответ на запрос перезапустить двигатель. Запрос перезапустить двигатель основан на повышении крутящего момента требования водителя (не показан). Сила TCC снижается по мере того, как повышается проскальзывание муфты гидротрансформатора. Скорость вращения двигателя остается постоянным, муфта расцепления привода на ведущие колеса остается разомкнутой, и DISG является заряжающим аккумуляторную батарею и подающим отрицательный крутящий момент привода на ведущие колеса.
Между моментом T63 времени и моментом T64 времени, DISG переходит из режима регулирования крутящего момента в режим управления скоростью вращения в ответ на повышение крутящего момента требования водителя. DISG затем регулируется на требуемую скорость вращения. TCC также может регулироваться, чтобы обеспечивать постоянную величину проскальзывания.
В момент T64времени, муфта расцепления привода на ведущие колеса по меньшей мере частично смыкается, чтобы запускать двигатель. Крутящий момент DISG повышается от отрицательного крутящего момента до нулевого крутящего момента, а затем, он обращается в положительный, чтобы обеспечивать крутящий момент для запуска двигателя. Величина крутящего момента DISG зависит от величины крутящего момента, используемого для проворачивания коленчатого вала двигателя. Скорость вращения двигателя возрастает по мере того, как искра и топливо подаются в двигатель, в то время как двигатель вращается.
Между моментом T64 времени и моментом T65 времени, крутящий момент на выходном валу двигателя возрастает, и крутящий момент сгорания разгоняет двигатель. DISG переводится обратно в режим торможения, и муфта расцепления привода на ведущие колеса размыкается в ответ на сгорание в двигателе. Размыкание муфты расцепления привода на ведущие колеса предоставляет двигателю возможность разгоняться до скорости вращения DISG, не оказывая влияния на крутящий момент привода на ведущие колеса.
В момент T65 времени, муфта расцепления привода на ведущие колеса смыкается в ответ на скорость вращения двигателя, достигающую скорости вращения DISG. Смыкание муфты расцепления привода на ведущие колеса после того, как двигатель достигает скорости вращения DISG, может уменьшать возмущения крутящего момента привода на ведущие колеса. Крутящий момент двигателя также уменьшается посредством снижения величины открывания дросселя или посредством регулирования установки фаз клапанного распределения цилиндра.
В момент T66 времени, двигатель переводится в режим замедления с перекрытым топливом, где двигатель вращается без снабжения топливом, и не сжигая топливно-воздушную смесь. Двигатель выдает тормозной момент, когда он вращается без снабжения топливом. Тормозной момент двигателя может регулироваться посредством регулирования давления во впускном коллекторе с помощью дросселя или клапанов цилиндра. DISG также переводится обратно в режим регулирования крутящего момента.
Таким образом, способы и системы по фиг. 1-3 и 29-30 предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; и начинание вращения двигателя в ответ на состояние заряда аккумуляторной батареи, превышающее пороговое значение. Таким образом, торможение двигателем может перехватывать торможение DISG, когда заряд устройства накопления энергии больше, чем пороговое значение (например, полностью заряженное). Способ дополнительно содержит автоматический останов двигателя и размыкание муфты расцепления привода на ведущие колеса между двигателем и электрической машиной, в то время как двигатель остановлен, а кроме того, содержит выдачу тормозного момента двигателя на колеса после запуска вращения двигателя, и где муфта расцепления привода на ведущие колеса по меньшей мере частично разомкнута для вращения двигателя.
В одном из примеров, способ дополнительно содержит приведение в действие электрической машины в режиме управления скоростью вращения наряду с преобразованием кинетической энергии транспортного средства в электрическую энергию. Способ дополнительно содержит увеличение проскальзывания муфты гидротрансформатора во время запуска вращения двигателя, в то время как скорость вращения двигателя меньше, чем скорость вращения холостого хода двигателя. Способ включает в себя те случаи, когда двигатель вращается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса вводится в зацепление для присоединения двигателя к встроенному в привод на ведущие колеса стартеру/генератору. Способ дополнительно содержит приведение в действие электрической машины в режиме управления скоростью вращения и регулирование крутящего момента электрической машины для поддержания скорости вращения привода на ведущие колеса на по существу постоянном крутящем моменте.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством первой электрической машины, в то время как вращение двигателя остановлено; начинание вращения двигателя в ответ на состояние заряда аккумуляторной батареи, превышающее пороговое значение в тех случаях, когда вращение двигателя выполняется посредством второй электрической машины. Способ включает в себя те случаи, когда вторая электрическая машина не присоединена к двигателю перед тем, как подана команда вращения двигателя. Способ включает в себя те случаи, когда первая электрическая машина не присоединена механически к двигателю, в то время как остановлено вращение двигателя.
В одном из примеров, способ включает в себя те случаи, когда вторая электрическая машина расцепляется с двигателем после того, как скорость вращения двигателя достигает пороговой скорости вращения. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса, когда скорость вращения двигателя является по существу равным первой электрической машине. Способ дополнительно содержит увеличение проскальзывания муфты гидротрансформатора во время смыкания муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда выходная мощность второй электрической машины ниже, чем выходная мощность первой электрической машины.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; стартер, иной чем DISG, включающий в себя базовое состояние, где стартер не зацеплен с двигателем; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для автоматического останова двигателя, обеспечения торможения приводом на ведущие колеса с помощью DISG, в то время как вращение двигателя остановлено, вращения остановленного двигателя посредством стартера, иного чем DISG, когда DISG является обеспечивающим торможение приводом на ведущие колеса, и когда состояние заряда аккумуляторной батареи больше, чем пороговый уровень.
В некоторых примерах, система транспортного средства дополнительно содержит дополнительные команды для повышения проскальзывания муфты гидротрансформатора, когда муфта расцепления привода на ведущие колеса по меньшей мере частично сомкнута. Система транспортного средства дополнительно содержит смыкание муфты расцепления привода на ведущие колеса после того, как запущен двигатель. Система транспортного средства включает в себя те случаи, когда DISG имеет выходную мощность, большую чем стартер, иной чем DISG. Система транспортного средства дополнительно содержит муфту гидротрансформатора и дополнительные команды для увеличения проскальзывания муфты гидротрансформатора во время смыкания муфты расцепления привода на ведущие колеса. Система транспортного средства включает в себя те случаи, когда DISG является подающим заряд в устройство накопления энергии при обеспечении торможения приводом на ведущие колеса.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; и регулирование крутящего момента электрической машины в ответ на состояние двигателя. Способ включает в себя те случаи, когда условием двигателя является температура масла. Способ включает в себя те случаи, когда условием двигателя является установка фаз клапанного распределения двигателя. Способ включает в себя те случаи, когда условием двигателя является температура охлаждающей жидкости двигателя. Способ включает в себя те случаи, когда условием двигателя является оцененный тормозной момент двигателя. Способ включает в себя те случаи, когда торможение приводом на ведущие колеса обеспечивается посредством приведения в действие электрической машины в режиме генератора. Способ включает в себя те случаи, когда крутящий момент электрической машины меняется по мере того, как меняется условие двигателя.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; и регулирование крутящего момента электрической машины на основании тормозного момента двигателя. Способ включает в себя те случаи, когда тормозной момент двигателя оценивается на основании температуры моторного масла. Способ включает в себя те случаи, когда тормозной момент двигателя оценивается на основании скорости вращения электрической машины. Способ включает в себя те случаи, когда крутящий момент электрической машины является отрицательным крутящим моментом. Способ включает в себя те случаи, когда электрическая машина находится в режиме генератора. Способ включает в себя те случаи, когда тормозной момент двигателя является тормозным моментом замедления с перекрытым топливом. Способ включает в себя те случаи, когда тормозной момент двигателя основан на положении дросселя.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; стартер, иной чем DISG, включающий в себя базовое состояние, где стартер не зацеплен с двигателем; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для автоматического останова двигателя, обеспечения торможения приводом на ведущие колеса с помощью DISG, в то время как вращение двигателя остановлено, и регулирования крутящего момента DISG на тормозной момент двигателя наряду с обеспечением торможения приводом на ведущие колеса.
В некоторых примерах, система транспортного средства дополнительно содержит дополнительные команды для разгона двигателя до скорости вращения DISG. Система транспортного средства дополнительно содержит дополнительные команды, чтобы уменьшать отрицательный крутящий момент, выдаваемый посредством DISG, в ответ на отрицательный крутящий момент, выдаваемый двигателем в привод на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные команды для запуска двигателя посредством стартера, иного чем DISG. Система транспортного средства дополнительно содержит дополнительные команды для прекращения сгорания в цилиндрах двигателя после запуска двигателя. Система транспортного средства дополнительно содержит дополнительные команды для регулирования торможения двигателем после прекращения сгорания в цилиндрах двигателя.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; и автоматический ввод в действие устройства для потребления энергии, выдаваемой посредством электрической машины, в то время как электрическая машина обеспечивает торможение приводом на ведущие колеса. Способ включает в себя те случаи, когда устройство вводится в действие в ответ на состояние заряда устройства накопления электричества, превышающее пороговый уровень.
В одном из примеров, способ включает в себя те случаи, когда устройство является нагревательным устройством. Способ включает в себя случаи, когда нагревательное устройство является оттаивателем окна. Способ включает в себя случаи, когда нагревательное устройство является нагревателем устройства контроля выбросов. Способ включает в себя те случаи, когда устройство является насосом. Способ включает в себя те случаи, когда насос является насосом впрыска топлива.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; и увеличение тока, подаваемого на устройство, в то время как электрическая машина обеспечивает торможение приводом на ведущие колеса. Способ включает в себя те случаи, когда увеличение тока основано на величине тока заряда, выдаваемой электрической машиной. Способ включает в себя те случаи, когда электрическая машина является выдающей заряд в устройство накопления энергии, в то время как электрическая машина является обеспечивающей торможение приводом на ведущие колеса. Способ включает в себя те случаи, когда увеличение тока основано на состоянии заряда устройства накопления энергии. Способ включает в себя те случаи, когда устройство является насосом. Способ включает в себя те случаи, когда устройство является нагревателем. Способ включает в себя те случаи, когда устройство является фарой.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; автоматический ввод в действие устройства для потребления энергии, выдаваемой посредством электрической машины, в то время как электрическая машина обеспечивает торможение приводом на ведущие колеса; вращение двигателя в ответ на состояние заряда устройства накопления энергии; и прекращение вращать двигатель, когда состояние заряда устройства накопления энергии меньше, чем пороговый уровень.
В одном из примеров, способ включает в себя те случаи, когда устройство для потребления заряда, снабжаемое посредством электрической машины, является устройством, имеющим рабочее состояние, которое не является видимым или слышимым водителем. Способ включает в себя те случаи, когда устройство для потребления заряда, выдаваемого посредством электрической машины, является нагревателем. Способ включает в себя случаи, когда нагреватель выдает тепло в окружающий воздух. Способ включает в себя случаи, когда нагреватель выдает тепло в систему выпуска. Способ дополнительно содержит прекращение обеспечивать торможение приводом на ведущие колеса посредством электрической машины, когда двигатель является вращающимся.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; приведение в действие электрической машины в режиме управления скоростью вращения в ответ на запрос обеспечивать торможение приводом на ведущие колеса посредством двигателя; запуск двигателя; разгон двигателя до скорости вращения электрической машины; и смыкание разомкнутой муфты расцепления привода на ведущие колеса в ответ на скорость вращения двигателя, по существу равную скорости вращения электрической машины. Способ включает в себя те случаи, когда двигатель запускается посредством стартера, иного чем электрическая машина.
В некоторых примерах, способ включает в себя те случаи, когда запрос обеспечивать торможение приводом на ведущие колеса посредством двигателя основан на состоянии заряда устройства накопления энергии. Способ включает в себя те случаи, когда запрос обеспечивать торможение приводом на ведущие колеса посредством двигателя происходит в ответ на состояние заряда устройства накопления энергии, являющееся большим, чем пороговая величина заряда. Способ дополнительно содержит регулирование проскальзывания муфты гидротрансформатора в ответ на смыкание разомкнутой муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда проскальзывание муфты гидротрансформатора увеличивается. Способ включает в себя те случаи, когда электрическая машина выдает крутящий момент для запуска двигателя.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают управление торможением приводом на ведущие колеса, содержащее: обеспечение торможения приводом на ведущие колеса посредством электрической машины, в то время как остановлено вращение двигателя; запуск и вращение двигателя; впрыск топлива в двигатель; разгон двигателя до скорости вращения электрической машины; и прекращение впрыскивать топлива в двигатель и обеспечение торможения приводом на ведущие колеса посредством двигателя, в то время как электрическая машина выдает меньшую, чем пороговая, величину тока. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса в ответ на скорость вращения двигателя, являющееся по существу равным скорости вращения электрической машины.
В одном из примеров, способ дополнительно содержит приведение в действие электрической машины в режиме управления скоростью вращения во время смыкания муфты расцепления привода на ведущие колеса. Способ дополнительно содержит увеличение проскальзывания муфты гидротрансформатора во время смыкания муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда двигатель запускается в ответ на заряд устройства накопления энергии, превышающий пороговый заряд. Способ включает в себя те случаи, когда крутящий момент электрической машины уменьшается в ответ на тормозной момент двигателя, увеличивающийся после прерывания впрыска топлива в двигатель. Способ включает в себя те случаи, когда двигатель запускается посредством стартера, иного чем электрическая машина.
Способы и системы по фиг. 1-3 и 29-30 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; стартер, иной чем DISG, включающий в себя базовое состояние, где стартер не зацеплен с двигателем; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для автоматического останова двигателя, обеспечения торможения приводом на ведущие колеса с помощью DISG, в то время как вращение двигателя остановлено, запуска двигателя в ответ на состояние заряда устройства накопления энергии, остановки сгорания в двигателе, в то время как двигатель является вращающимся, и обеспечения торможения приводом на ведущие колеса посредством двигателя. Таким образом, система может преобразовывать электрическое торможение приводом на ведущие колеса в механическое торможение приводом на ведущие колеса.
В некоторых примерах, система транспортного средства дополнительно содержит дополнительные команды для разгона двигателя до скорости вращения DISG. Система транспортного средства дополнительно содержит дополнительные команды для смыкания муфты расцепления привода на ведущие колеса, когда скорость вращения двигателя по существу равно скорости вращения DISG. Система транспортного средства дополнительно содержит дополнительные команды для запуска двигателя посредством стартера, иного чем DISG. Система транспортного средства дополнительно содержит дополнительные команды для прекращения сгорания в цилиндрах двигателя после запуска двигателя. Система транспортного средства дополнительно содержит дополнительные команды для регулирования торможения двигателем после прекращения сгорания в цилиндрах двигателя.
Далее, со ссылкой на фиг. 31, показана блок-схема последовательности операций способа для регулирования люфта привода на ведущие колеса во время торможения транспортного средства, обеспечиваемого посредством привода на ведущие колеса транспортного средства. Способ по фиг. 31 может храниться в качестве выполняемых команд в постоянной памяти в системе по фиг. 1-3.
На 3102, способ 3100 оценивает, отключен или нет двигатель, и находится или нет DISG в режиме рекуперации (например, где DISG является преобразующим кинетическую энергию транспортного средства в электрическую энергию). В одном из примеров, двигатель может оцениваться остановившим вращение, когда скорость вращения двигателя имеет значение ноль. DISG может определяться находящимся в режиме рекуперации, когда ток вытекает из DISG, и DISG является выдающим отрицательный крутящий момент в привод на ведущие колеса. Если способ 3100 делает вывод, что двигатель не является вращающимся, и DISG находится в режиме рекуперации, ответом является да, и способ 3100 переходит на 3104. Иначе, ответом является нет, и способ 3100 переходит на выход.
На 3104, способ 3100 переключает трансмиссию на передачу, которая предоставляет скорости вращения DISG возможность оставаться ниже базовой скорости вращения DISG. Базовая скорость вращения DISG является частотой вращения, ниже которой DISG может обеспечивать номинальный крутящий момент (например, максимальный крутящий момент DISG). Если скорость вращения DISG является большей, чем базовая скорость вращения DISG, крутящий момент DISG является обратно пропорциональным скорости вращения DISG. Таким образом, если скорость вращения DISG является большей, чем базовая скорость вращения DISG, трансмиссия может подвергаться включению повышающей передачи, так чтобы скорость вращения DISG была меньшей, чем базовая скорость вращения DISG. Если скорость транспортного средства такова, что скорость вращения DISG не может уменьшаться до меньшей, чем базовая скорость вращения DISG, посредством включения повышающей передачи трансмиссии, трансмиссия может переключаться на передачу, которая предоставляет DISG возможность вращаться на скорости вращения, ближайшей к базовой скорости вращения DISG. Дополнительно, в некоторых примерах, DISG может переводиться в режим управления скоростью вращения на 3104 вместо ожидания увеличения крутящего момента требования водителя. Способ 3100 переходит на 3106 после того, как переключена трансмиссия, так что скорость вращения DISG находится около или меньше, чем базовая скорость вращения DISG.
На 3106, способ 3100 оценивает, есть или нет запрос на повышенный положительный крутящий момент привода на ведущие колеса. Запрос на повышенный положительный крутящий момент привода на ведущие колеса может происходить в ответ на возрастающий крутящий момент требования водителя. Крутящий момент требования водителя может определяться по педали акселератора или из контроллера. Если способ 3100 делает вывод, что есть запрос на повышенный положительный крутящий момент привода на ведущие колеса (например, для разгона транспортного средства), ответом является да, и способ 3100 переходит на 3108. Иначе, ответом является нет, и способ 3100 возвращается на 3104.
На 3108, способ 3100 регулирует несущую способность муфты гидротрансформатора (TCC). В одном из примеров, несущая способность TCC регулируется на требуемый крутящий момент на выходном валу гидротрансформатора минус величина крутящего момент, которую вырабатывал бы гидротрансформатор с полностью разомкнутой TCC. Величина крутящего момента, которую трансформатор вырабатывал бы с полностью разомкнутой TCC, может определятся по скорости вращения насосного колеса гидротрансформатора и скорости вращения турбины гидротрансформатора. В частности, скорость вращения насосного колеса гидротрансформатора и скорость вращения турбины гидротрансформатора индексируют функцию или таблицу, хранимую в памяти, которая выводит выходной крутящий момент гидротрансформатора на основании скорости вращения насосного колеса гидротрансформатора и скорости вращения турбины гидротрансформатора. Как только несущая способность TCC определена, она выводится на TCC. Способ 3100 переходит на 3110 после того, как отрегулирована несущая способность TCC.
На 3110, DISG переводится в режим управления скоростью вращения из режима регулирования крутящего момента. В режиме управления скоростью вращения, крутящий момент DISG регулируется, чтобы давать требуемую скорость вращения DISG. Требуемая скорость вращения DISG может быть постоянной, или она может изменяться в зависимости от условий эксплуатации транспортного средства. Способ 3100 переходит на 3112 после того, как DISG переведен в режим управления скоростью вращения.
На 3112, способ 3100 регулирует скорость вращения DISG для регулирования крутящего момента на выходном валу гидротрансформатора. В частности, крутящий момент гидротрансформатора перестраивается с отрицательного крутящего момента на положительный крутящий момент посредством регулирования скорости вращения DISG. В одном из примеров, требуемый профиль крутящего момента на выходном валу гидротрансформатора хранится в памяти и извлекается во время перехода с торможения приводом на ведущие колеса (например, отрицательного крутящего момента привода на ведущие колеса) на ускорение привода на ведущие колеса (например, положительный крутящий момент привода на ведущие колеса). Требуемый профиль крутящего момента на выходном валу гидротрансформатора предписывает крутящий момент на выходном валу гидротрансформатора на основании изменения крутящего момента требования водителя и текущей передачи трансмиссии. Требуемый крутящий момент на выходном валу гидротрансформатора и скорость вращения турбины вводятся в функцию или таблицу, которая выводит скорость вращения насосного колеса гидротрансформатора. Таблица или функция описывает передаточную функцию гидротрансформатора. DISG дается команда на скорость вращения насосного колеса гидротрансформатора, так чтобы гидротрансформатор производил требуемый крутящий момент на выходном валу гидротрансформатора. После того, как DISG выполняет требуемый выходной профиль гидротрансформатора, крутящий момент DISG регулируется, чтобы обеспечивать требуемый крутящий момент требования водителя. Таким образом, скорость вращения DISG регулируется в качестве функции скорости вращения турбины гидротрансформатора и требуемой отдачи гидротрансформатора. В ином изложении, фактический крутящий момент на выходе гидротрансформатора регулируется в качестве функции скорости вращения насосного колеса и скорости вращения турбины гидротрансформатора.
В альтернативном примере, скорость вращения DISG регулирует крутящий момент на выходном валу гидротрансформатора, меняя скорость вращения насосного колеса гидротрансформатора относительно скорости вращения турбины гидротрансформатора. В частности, DISG увеличивает крутящий момент на выходном валу гидротрансформатора с отрицательного крутящего момента до положительного крутящего момента посредством увеличения скорости вращения DISG. Крутящий момент на выходном валу гидротрансформатора быстро повышается для уменьшения люфта между шестернями трансмиссии и привода на ведущие колеса. Крутящий момент на выходном валу гидротрансформатора снижается по мере того, как уменьшается люфт между зубчатыми парами, так чтобы мог ослабляться удар зуба шестерни о зуб шестерни.
Например, люфт шестерен, переходящий от зуба шестерни к зубу шестерни, регулируется посредством регулирования крутящего момента на выходном валу гидротрансформатора в качестве функции оцененной скорости от зуба шестерни к зубу шестерни. В одном из примеров, от скорости зуба шестерни к скорости зуба шестерни является разностью между частотой вращения турбины гидротрансформатора и либо выходной частотой вращения трансмиссии, либо частотой вращения колес. Разность скоростей вращения между частотой вращения турбины и выходной частотой вращения трансмиссии или частотой вращения колес относительно невелика до тех пор пока не ослаблено скручивание валов привода на ведущие колеса. Положительный крутящий момент на выходном валу гидротрансформатора повышается посредством увеличения скорости вращения DISG в ответ на небольшую разность скорости вращения между частотой вращения турбины гидротрансформатор и выходной частотой вращения трансмиссии или частотой вращения колес. Выходная скорость вращения DISG быстрой повышается, когда разность скорости вращения турбины гидротрансформатора и выходной скорости вращения трансмиссии или скорости вращения колес мала, так что зубья шестерен разделены. Разность скоростей вращения будет возрастать по мере того, как зубья шестерен переходят из нахождения в контакте к отсутствию нахождения в контакте. Скорость вращения DISG уменьшается по мере того, как разность скорости вращения турбины гидротрансформатора и выходной скорости вращения трансмиссии или скорости вращения колес возрастает, так чтобы могла уменьшаться сила удара между зубчатыми парами.
В одном из примеров, как только скорость вращения насосного колеса гидротрансформатора минус скорость вращения выходного вала трансмиссии или скорость вращения колес превышает пороговую скорость вращения, скорость вращения DISG уменьшается, чтобы снижать силу удара зуба о зуб. Скорость вращения DISG повышается после того, как разность между частотой вращения турбины гидротрансформатора и выходной частотой вращения трансмиссии или частотой вращения колес меньше, чем пороговая скорость вращения, так чтобы зубья шестерен оставались в контакте после перехода с отрицательного крутящего момента привода на ведущие колеса на положительный крутящий момент привода на ведущие колеса. Способ 3100 переходит на 3114 после того, как начинается регулирование люфта DISG.
На 3114, способ 3100 оценивает, уменьшается или нет люфт шестерен до меньшего, чем пороговая величина. В одном из примеров, люфт шестерен определяется являющимся меньшим, чем пороговая величина, когда положительный крутящий момент был приложен к приводу на ведущие колеса, и разность между частотой вращения турбины гидротрансформатора и выходной частотой вращения трансмиссии или частотой вращения колес меньше, чем пороговый уровень. Если способ 3100 делает вывод, что люфт шестерен уменьшается до меньшего, чем пороговая величина, ответом является да, и способ 3100 переходит на 3116. Иначе, ответом является нет, и способ 3100 возвращается на 3112.
На 3116, способ 3100 увеличивает крутящий момент на выходном валу DISG. Поскольку DISG находится в режиме управления скоростью вращения, крутящий момент на выходном валу DISG может повышаться в ответ на крутящий момент привода на ведущие колеса, передаваемый на двигатель и уменьшающий скорость вращения привода на ведущие колеса. Другими словами, положительный крутящий момент DISG может повышаться по мере того, как скорость вращения DISG снижается от требуемой скорости вращения DISG. В еще одном примере, выходной крутящий момент DISG может повышаться, в то время как DISG находится в режиме управления скоростью вращения посредством увеличения крутящего момента DISG на основании крутящего момента муфты расцепления привода на ведущие колеса (например, величины крутящего момента, передаваемого с DISG на двигатель через DISG). Требуемый крутящий момент муфты расцепления привода на ведущие колеса может храниться в памяти в функции или таблице, и увеличение крутящего момента прикладывается к DISG во время перезапуска двигателя в ответ на смыкание муфты расцепления. Способ 3100 переходит на 3118 после того, как отрегулирован крутящий момент на выходном валу DISG для запуска двигателя.
На 3118, способ 3100 перезапускает двигатель. Двигатель перезапускается посредством по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса и подачи искры и топлива в двигатель. В некоторых примерах, смыкание муфты расцепления привода на ведущие колеса и увеличение крутящего момента на выходном валу DISG может происходить одновременно, так чтобы могло ослабляться любое возмущение крутящего момента привода на ведущие колеса. Способ 3100 переходит на 3120 после того, как начинается запуск двигателя.
На 3120, способ 3100 подавляет возмущения крутящего момента двигателя, которые могут обеспечиваться в привод на ведущие колеса. Например, во время запуска двигателя, двигатель может потреблять крутящий момент привода на ведущие колеса, с тем чтобы осуществлять разгон во время запуска. Возмущения крутящего момента двигателя могут подавляться в ответ на изменение скорости вращения привода на ведущие колеса в DISG. Поскольку DISG находится в режиме управления скоростью вращения и является отслеживающим требуемую скорость вращения, крутящий момент DISG может повышаться, когда двигатель потребляет крутящий момент привода на ведущие колеса и замедляет привод на ведущие колеса. Дополнительно, если двигатель разгоняется и подает крутящий момент в привод на ведущие колеса после запуска, крутящий момент DISG может снижаться, так что эффективный крутящий момент, подведенный к приводу на ведущие колеса посредством DISG и двигателя, остается по существу постоянным (например, +30 Н∙м). Таким образом, скорость вращения привода на ведущие колеса может регулироваться способом с замкнутым контуром посредством регулирования крутящего момента DISG.
В еще одном примере, возмущения крутящего момента привода на ведущие колеса могут подавляться посредством регулирования крутящего момента DISG с разомкнутым контуром. Например, когда муфта расцепления начинает смыкаться, крутящий момент DISG может повышаться, в то время как DISG находится в режиме управления скоростью вращения. В частности, крутящий момент DISG может регулироваться посредством прибавления крутящего момента муфты расцепления привода на ведущие колеса к команде крутящего момента DISG. Команда крутящего момента DISG дополнительно регулируется в ответ на скорость вращения DISG. Таким образом, если крутящий момент муфты расцепления привода на ведущие колеса недооценен или переоценен, контур регулирования скорости вращения DISG будет устранять ошибку крутящего момента расцепления привода на ведущие колеса, которая была добавлена к крутящему моменту DISG. Возмущения крутящего момента привода на ведущие колеса, подавляемые во время запуска двигателя, могут подавляться между моментом времени, когда начинается проворачивание коленчатого вала двигателя, до тех пор, пока двигатель не достигает скорости вращения DISG, и муфта расцепления привода на ведущие колеса не смыкается полностью. Способ 3100 переходит на 3122 после того, как подавлены возмущения привода на ведущие колеса во время запуска двигателя.
На 3122, способ 3100 выдает требуемый крутящий момент в привод на ведущие колеса. Требуемый крутящий момент может обеспечиваться исключительно посредством DISG, исключительно посредством двигателя или с помощью двигателя и DISG. В одном из примеров, крутящий момент DISG и крутящий момент двигателя выдаются в качестве долей крутящего момента требования водителя, который определяется по педали акселератора. Например, если крутящий момент требования водителя определен имеющим значение 100 Н∙м на насосном колесе гидротрансформатора, двигатель может обеспечивать 80% крутящего момента требования водителя или 80 Н∙м наряду с тем, что DISG выдает 20% или 20 Н∙м, так что 100 Н∙м выдаются на насосное колесо гидротрансформатора. Способ 3100 переходит на выход после того, как требуемый крутящий момент выдается в привод на ведущие колеса.
Должно быть отмечено, что, в некоторых примерах, 3116-3120 могут происходить одновременно с 3108-3114, так что крутящий момент привода на ведущие колеса может быть реагирующим на крутящий момент требования водителя. Переключение трансмиссии на передачу, которая предоставляет DISG возможность работать ниже базовой скорости вращения DISG, может увеличивать вероятность, что DISG имеет несущую способность по крутящему моменту для перезапуска двигателя и одновременно смягчать удар шестерен от люфта шестерен привода на ведущие колеса.
Далее, со ссылкой на фиг. 32, показана примерная последовательность для ослабления удара люфта шестерен привода на ведущие колеса согласно способу по фиг. 31. Последовательность по фиг. 32 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 32 представляет собой скорость транспортного средства в зависимости от времени. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 32 представляет крутящий момент требования водителя в зависимости от времени. Ось Y представляет крутящий момент требования водителя, и крутящий момент требования водителя возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 32 представляет собой состояние двигателя в зависимости от времени. Ось Y представляет состояние двигателя, и двигатель является вращающимся, когда кривая состояния двигателя находится на верхнем уровне. Двигатель прекратил вращение, когда кривая состояния двигателя находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график по фиг. 32 представляет рабочий цикл муфты гидротрансформатора (TCC) в зависимости от времени. Ось Y представляет рабочий цикл TCC, и рабочий цикл TCC увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Сила смыкания TCC возрастает по мере того, как увеличивается рабочий цикл TCC. TCC может передавать меньший крутящий момент между DISG и трансмиссией, в то время как рабочий цикл TCC возрастает, так как может уменьшаться умножение крутящего момента гидротрансформатора. TCC блокируется (например, скорость вращения насосного колеса гидротрансформатора равна скорости вращения турбины гидротрансформатора), когда кривая TCC находится возле стрелки оси Y.
Пятый график сверху по фиг. 32 представляет собой передачу трансмиссии в зависимости от времени. Ось Y представляет передачу трансмиссии, и специфичные передачи трансмиссии указаны вдоль оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Шестой график сверху по фиг. 32 представляет собой скорость вращения DISG в зависимости от времени. Ось Y представляет скорость вращения DISG, и скорость вращения DISG возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 3202 представляет базовую скорость вращения DISG.
В момент T68 времени, скорость транспортного средства находится на повышенном уровне, как и крутящий момент требования водителя. Двигатель является работающим и сжигающим топливно-воздушные смеси. TCC блокируется, как указано рабочим циклом TCC, находящимся возле метки оси Y. Трансмиссия находится на пятой передаче, а скорость вращения DISG находится на среднем уровне и выше базовой скорости вращения 3202 DISG.
В момент T69 времени, крутящий момент требования водителя уменьшается до низкого значения, например, в ответ на отпускание водителем педали акселератора. Скорость транспортного средства, крутящий момент требования водителя, состояние двигателя, рабочий цикл TCC, передача трансмиссии и скорость вращения DISG остаются на подобных уровнях, как в момент T68 времени. Однако, DISG переходит с выработки положительного крутящего момента и потребления электрической энергии к созданию отрицательного крутящего момента и выработке электрической энергии. Подача топлива и искры в двигатель также прекращаются, так чтобы двигатель замедлялся, но продолжал вращаться, не принимая топливо.
Между моментом T69 времени и моментом T70 времени, скорость транспортного средства уменьшается, как это делает скорость вращения DISG. Двигатель продолжает вращаться, как указано состоянием двигателя, остающимся на верхнем уровне, и рабочий цикл TCC также остается на верхнем уровне, где TCC заблокирована. Трансмиссия остается на 5ой передаче, и крутящий момент требования водителя остается на нижнем уровне.
В момент T70 времени, вращение двигателя останавливается в ответ на низкий крутящий момент требования водителя, как указано флажковым признаком состояния двигателя, переходящим на нижний уровень. Муфта расцепления привода на ведущие колеса (не показана) размыкается, и DISG переводится в режим управления скоростью вращения в ответ на останов двигателя. Скорость вращения DISG и скорость транспортного средства продолжают снижаться, и трансмиссия остается на 5ой передаче.
Между моментом T70 времени и моментом T71 времени, скорость транспортного средства и скорость вращения DISG продолжают уменьшаться. В этом примере, трансмиссия включает понижающую передачу, когда включение пониженной передачи предоставит скорости вращения DISG возможность оставаться под базовой частотой вращения DISG. Скорости вращения DISG дается команда на скорость вращения, основанную на крутящем моменте требования водителя, скорости транспортного средства и выбранной передаче. Например, трансмиссия удерживается на 5ой передаче, и скорость вращения DISG снижается до меньшей, чем базовая скорость вращения DISG. Скорость вращения DISG продолжает снижаться до пороговой скорости вращения, на которой DISG будет находиться ниже базовой скорости вращения DISG, если трансмиссия переключена на 4ую передачу. Трансмиссия переключается с понижением передачи на 4ую передачу, когда скорость вращения DISG меньше, чем пороговая скорость вращения, и скорость вращения DISG повышается до скорости вращения, которая основана на скорости вращения DISG до переключения и нового передаточного отношения.
В некоторых примерах, во время начала замедления транспортного средства или уменьшения крутящего момента требования водителя, текущая скорость вращения DISG может быть большей, чем базовая скорость вращения DISG. В этих случаях, трансмиссия может подвергаться включению повышающей передачи в начале замедления транспортного средства или в ответ на уменьшение крутящего момента требования водителя, так что скорость вращения DISG снижается до меньшей, чем базовая частота DISG. Посредством снижения скорости вращения DISG до меньшей, чем базовая скорость вращения DISG, может быть возможным обеспечивать крутящий момент из DISG для перезапуска двигателя и ослабления удара зуба шестерни о зуб шестерни, который обусловлен люфтом шестерен. Передачи трансмиссии подвергаются включению понижающей передачи в моменты времени, которые предоставляют скорости вращения DISG оставаться меньшей, чем базовая скорость вращения DISG.
Рабочий цикл TCC также уменьшается в ответ на состояние муфты расцепления привода на ведущие колеса (не показано), скорость транспортного средства и крутящий момент требования водителя. Сила прижатия TCC и рабочий цикл TCC модулируются для ослабления возмущения крутящего момента внутри привода на ведущие колеса, которые могут происходить в результате размыкания муфты расцепления привода на ведущие колеса. Двигатель остается остановленным, как указано состоянием двигателя, находящимся на нижнем уровне. Крутящий момент требования водителя также остается низким.
Также должно быть упомянуто, что зубья шестерен привода на ведущие колеса могут переводиться с передачи крутящего момента с передних поверхностей зубьев шестерен на задние поверхности зубьев шестерен по мере того, как привод на ведущие колеса переходит с выработки положительного крутящего момента на выдачу отрицательного крутящего или тормозного момента. Удар зубьев шестерен может происходить в результате, когда привод на ведущие колеса переходит обратно на выработку положительного крутящего момента, если переход не управляется требуемым образом.
В момент T71 времени, крутящий момент требования водителя повышается в ответ на входной сигнал водителя или контроллера. Скорость вращения DISG повышается, с тем чтобы разделять зубья в приводе на ведущие колеса. DISG разгоняется в качестве функции разности скоростей от зуба шестерни к зубу шестерни. В частности, DISG разгоняется с более высоким темпом, когда зубья шестерен находятся на одной скорости, с тем чтобы разделять зубья.
В момент T72 времени, ускорение DISG уменьшается, и DISG может замедляться по мере того, как увеличивается разность скоростей между зубьями шестерен. Замедление DISG может ослаблять силы удара зуба шестерни о зуб шестерни посредством уменьшения скорости между зубьями шестерен. Вскоре после момента T72 времени, ускорение DISG увеличивается после того, как был устранен промежуток или люфт между зубьями шестерен. Посредством выжидания, для ускорения DISG, до после того, как зубья шестерен находятся в контакте, может быть возможным уменьшать возмущения крутящего момента привода на ведущие колеса и обеспечивать более плавные переходы с отрицательного на положительный крутящий момент. Проскальзывание и сила прижатия TCC между моментом T71 времени и моментом T73 времени также регулируются и/или модулируются для ослабления возмущений крутящего момента в приводе на ведущие колеса. Крутящий момент из DISG начинает разгонять транспортное средство, и DISG переводится в режим управления скоростью вращения.
В момент T73 времени, искра и топливо подаются в двигатель, а муфта расцепления привода на ведущие колеса смыкается, так чтобы перезапускался двигатель. Рабочий цикл и сила прижатия TCC модулируются для уменьшения любого возмущения крутящего момента в приводе на ведущие колеса, который может происходить вследствие смыкания муфты расцепления привода на ведущие колеса во время запуска двигателя. TCC блокируется после того, как двигатель запущен, с тем чтобы улучшать коэффициент полезного действия привода на ведущие колеса. Кроме того, трансмиссия начинает переключение по передачам для разгона транспортного средства.
Таким образом, люфт и удар между зубьями шестерен привода на ведущие колеса могут уменьшаться, когда привод на ведущие колеса переводится из режима торможения в режим выработки крутящего момента. Посредством регулирования скорости вращения и крутящего момента DISG таким образом, может быть возможным ослаблять возмущения крутящего момента привода на ведущие колеса, которые могут быть видны водителю.
Таким образом, способы и системы по фиг. 1-3 и 31-32 предусматривают контроль люфта привода на ведущие колеса, содержащее: переключение трансмиссии на передачу, которая дает электрической машине, которая присоединена к трансмиссии, возможность работать на более низкой скорости вращения, чем базовая скорость вращения электрической машины в ответ на уменьшение крутящего момента требования водителя; и уменьшение удара зуба шестерни о зуб шестерни посредством приведения в действие электрической машины в режиме управления скоростью вращения во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент. Способ дополнительно содержит уменьшение силы прижатия муфты гидротрансформатора во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент. Способ дополнительно содержит прекращение вращения двигателя в ответ на снижение крутящего момента требования водителя.
В одном из примеров, способ дополнительно содержит размыкание муфты расцепления привода на ведущие колеса в ответ на уменьшение крутящего момента требования водителя. Способ дополнительно содержит регулирование скорости вращения электрической машины в ответ на разность скорости между зубом первой шестерни и зубом второй шестерни во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент. Способ дополнительно содержит включение понижающей передачи трансмиссии в ответ на скорость транспортного средства. Способ включает в себя те случаи, когда электрическая машина приводится в действие в режиме регулирования крутящего момента непосредственно перед приведением в действие электрической машины в режиме управления скоростью вращения во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент.
Способы и системы по фиг. 1-3 и 31-32 также предусматривают контроль люфта привода на ведущие колеса, содержащее: уменьшение удара зуба шестерни о зуб шестерни посредством приведения в действие электрической машины в режиме управления скоростью вращения во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент; и разгон электрической машины для разделения зуба первой шестерни и зуба второй шестерни во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент. Способ дополнительно содержит замедление электрической машины в ответ на увеличение разности скорости между зубом первой шестерни и зубом второй шестерни. Способ дополнительно содержит ускорение электрической машины в ответ на уменьшение разности скорости между зубом первой шестерни и зубом второй шестерни после замедления электрической машины.
В одном из примеров, способ включает в себя те случаи, когда переход с отрицательного крутящего момента на положительный крутящий момент происходит в ответ на увеличение крутящего момента требования водителя. Способ дополнительно содержит размыкание муфты расцепления привода на ведущие колеса, которая механически присоединена к электрической машине, перед уменьшением удара зуба шестерни о зуб шестерни в ответ на снижение крутящего момента требования водителя. Способ дополнительно содержит уменьшение силы прижатия муфты гидротрансформатора в ответ на крутящий момент требования водителя перед уменьшением удара зуба шестерни о зуб шестерни. Способ включает в себя те случаи, когда скорость вращения электрической машины регулируется в качестве функции разности скоростей между зубом первой шестерни и зубом второй шестерни.
Способы и системы по фиг. 1-3 и 31-32 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для автоматического останова вращения двигателя, ослабления удара зуба шестерни о зуб шестерни посредством приведения в действие DISG в режиме управления скоростью вращения во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент, и для начинания вращения двигателя наряду с ослаблением удара зуба шестерни о зуб шестерни.
В одном из примеров, система транспортного средства включает в себя те случаи, когда вращение двигателя запускается посредством смыкания муфты расцепления привода на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные команды для регулирования силы прижатия муфты гидротрансформатора наряжу с уменьшением удара зуба шестерни о зуб шестерни. Система транспортного средства дополнительно содержит дополнительные команды для размыкания муфты расцепления привода на ведущие колеса в ответ на крутящий момент требования водителя. Система транспортного средства дополнительно содержит дополнительные команды для по меньшей мере частичного смыкания муфты расцепления привода на ведущие колеса для запуска двигателя в ответ на крутящий момент требования водителя. Система транспортного средства дополнительно содержит дополнительные команды для переключения трансмиссии на передачу, которая вращает DISG на скорости вращения, меньшей, чем базовая скорость вращения DISG, во время замедления транспортного средства.
Далее, со ссылкой на фиг. 33, показана блок-схема последовательности операций способа для переключения торможения транспортного средства с привода на ведущие колеса на фрикционные тормоза. Способ по фиг. 33 может храниться в качестве выполняемых команд в постоянной памяти в системе по фиг. 1-3.
Далее, со ссылкой на 3302, способ 3300 оценивает массу транспортного средства и уклон дороги. В одном из примеров, уклон дороги может оцениваться или определяться посредством уклономера. Масса транспортного средства может определяться на 904 способа 900. Способ 3300 переходит на 3304 после того, как определены масса транспортного средства и уклон дороги.
На 3304, способ 3300 оценивает, является или нет транспортное средство замедляющимся, или уменьшил ли водитель запрос крутящего момента водителя. В одном из примеров, замедление транспортного средства может определяться посредством уменьшения скорости транспортного средства. Уменьшенный крутящий момент требования водителя может определяться по отпусканию педали акселератора. Если способ 3300 делает вывод, что присутствует замедление транспортного средства или уменьшенное запрос водителя, ответом является да, и способ 3300 переходит на 3306. Иначе, ответом является нет, и способ 3300 переходит на выход.
На 3306, способ 3300 оценивает, является или нет состояние заряда (SOC) устройства накопления энергии меньшим, чем пороговая величина заряда. В одном из примеров, SOC может определяться посредством измерения напряжения аккумуляторной батареи. Если SOC устройства накопления энергии меньше, чем пороговая величина заряда, ответом является да, и способ 3300 переходит на 3308. Иначе, ответом является нет, и способ 3300 переходит на 3312.
На 3308, способ 3300 останавливает вращение двигателя и размыкает муфту расцепления привода на ведущие колеса. Двигатель останавливается посредством прекращения снабжать двигатель искровым зажиганием и топливом. Способ 3300 переходит на 3310 после того, как вращение двигателя остановлено, и муфта расцепления привода на ведущие колеса разомкнута.
На 3310, способ 3300 приводит в действие DISG в режиме генератора и заряжает устройство накопления энергии. DISG выдает отрицательный крутящий момент в привод на ведущие колеса транспортного средства в режиме генератора. В одном из примеров, величина отрицательного крутящего момента, который DISG выдает в привод на ведущие колеса, может регулироваться в ответ на скорость транспортного средства и крутящий момент требования водителя. В еще одном примере, величина отрицательного крутящего момента, который DISG выдает на DISG, может регулироваться на оцененный тормозной момент двигателя, как описано в материалах настоящего описания, в текущих условиях эксплуатации. Темп замедления транспортного средства также может сохраняться в памяти 3310. Способ 3300 возвращается на 3304 после того, как DISG начинает заряжать устройство накопления энергии.
На 3312, способ 3300 начинает снижать отрицательный крутящий момент DISG. Кроме того в некоторых примерах, муфта расцепления привода на ведущие колеса может смыкаться, так чтобы двигатель мог обеспечивать торможение приводом на ведущие колеса. В одном из примеров, отрицательный крутящий момент DISG уменьшается по направлению к нулю в ответ на величину крутящего момента, передаваемого на двигатель через муфту расцепления привода на ведущие колеса. Снижение отрицательного крутящего момента DISG основано на уменьшении зарядного тока. Способ 3300 переходит на 3314 после того, как начинает снижаться крутящий момент DISG.
На 3314, способ 3300 оценивает крутящий момент колес посредством текущего уклона дороги и замедления транспортного средства. Крутящий момент колес может оцениваться на основании следующих уравнений:
так что
Где F равна силе для ускорения/замедления транспортного средства, m - масса транспортного средства, R_rr - радиус качения колеса, a представляет ускорение транспортного средства, g - ускорение, обусловленное силой тяжести, а ⊖ - угол дороги. Способ 3300 переходит на 3318 после того, как определен крутящий момент колеса.
На 3316, способ 3300 регулирует давление масла снабжения тормозов в ответ на крутящий момент колес транспортного средства и уменьшение отрицательного крутящего момента DISG (например, по направлению к нулевому крутящему моменту DISG). В частности, способ 3300 одновременно наращивает давление масла, подаваемое на фрикционные тормоза транспортного средства, и уменьшает отрицательный крутящий момент DISG. Сила фрикционного тормоза транспортного средства повышается со скоростью, которая уравновешивает уменьшение отрицательного крутящего момента DISG, чтобы давать эквивалентный темп замедления транспортного средства. В одном из примеров, давление масла в тормозной магистрали с разомкнутым контуром, которое может быть связано с силой прижатия тормозов, извлекается из таблицы или функции, которая включает в себя определенные опытным путем давления масла в тормозной магистрали, в ответ на требуемый тормозной момент колес. Требуемый тормозной момент колес, выдаваемый фрикционными тормозами, является крутящим моментом колес из 3314 минус снижение крутящего момента DISG, умноженное на текущее передаточное отношение трансмиссии и передаточное число ведущего моста. Давление масла в тормозной магистрали наращивается до давления, которое дает требуемый тормозной момент колес. Таким образом, регулирование с замкнутым контуром при торможении транспортного средства может достигаться на основании крутящего момента колес. Дополнительно, в некоторых примерах, муфта расцепления привода на ведущие колеса может смыкаться, а двигатель вращаться без топлива, чтобы обеспечивать тормозной момент привода на ведущие колеса, в ответ на снижение крутящего момента DISG и другие условия эксплуатации. Способ 3300 переходит на 3318 после начинания наращивать давление масла в тормозной магистрали и после начинания наращивать отрицательный крутящий момент DISG.
В других примерах, давление масла в тормозной магистрали может повышаться на оценку с разомкнутым контуром силы прижатия тормозов, и сила прижатия тормозов может дополнительно регулироваться на основании разности между требуемой скоростью транспортного средства и фактической скоростью транспортного средства. Таким образом, разность скорости транспортного средства может быть параметром замкнутого контура для регулирования силы фрикционного торможения.
На 3318, способ 3300 оценивает, есть или нет запрос торможения от водителя. В одном из примеров, запрос торможения от водителя может определяться по положению тормозной педали. Если способ 3300 делает вывод, что есть запрос торможения от водителя, ответом является да, и способ 3300 переходит на 3320. Иначе, ответом является нет, и способ 3300 переходит на 3322.
На 3320, давление масла в тормозной магистрали повышается в ответ на входной сигнал требования водителя. В одном из примеров, давление масла в тормозной магистрали для фрикционных тормозов повышается пропорционально смещению тормозной педали. Способ 3300 переходит на 3322 после того, как давление масла в тормозной магистрали повышено в ответ на команду торможения водителя.
На 3322, способ 3300 оценивает, остановлено или нет транспортное средство. Транспортное средство может оцениваться остановленным, когда скорость транспортного средства является нулевой. Если транспортное средство оценено остановленным, ответом является да, и способ 3300 осуществляет выход. Если транспортное средство оценено движущимся, ответом является нет, и способ 3300 возвращается на 3312.
Далее, со ссылкой на фиг. 34, показана примерная последовательность для перевода торможения транспортного средства с привода на ведущие колеса на фрикционные тормоза согласно способу по фиг. 33. Последовательность по фиг. 34 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 34 представляет собой скорость транспортного средства в зависимости от времени. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 34 представляет состояние муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет состояние муфты расцепления привода на ведущие колеса, и муфта расцепления привода на ведущие колеса сомкнута, когда кривая состояния муфты расцепления привода на ведущие колеса находится возле стрелки оси Y. Муфта расцепления привода на ведущие колеса разомкнута, когда кривая состояния муфты расцепления привода на ведущие колеса находится возле оси X. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 34 представляет собой состояние двигателя в зависимости от времени. Ось Y представляет состояние двигателя, и двигатель является вращающимся, когда кривая состояния двигателя находится на верхнем уровне. Двигатель прекратил вращение, когда кривая состояния двигателя находится на нижнем уровне. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 34 представляет собой состояние заряда (SOC) аккумуляторной батареи в зависимости от времени. Ось Y представляет SOC аккумуляторной батареи, и SOC возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 34 представляет собой крутящий момент DISG в зависимости от времени. Ось Y представляет крутящий момент DISG, и крутящий момент DISG может быть положительным или отрицательным. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Шестой график сверху по фиг. 34 представляет давление масла в тормозной магистрали фрикционных тормозов в зависимости от времени. Ось Y представляет давление масла в тормозной магистрали, и давление масла в тормозной магистрали возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Седьмой график сверху по фиг. 34 представляет собой крутящий момент колес транспортного средства в зависимости от времени. Ось Y представляет крутящий момент колес транспортного средства, и крутящий момент колес транспортного средства увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T74 времени, скорость транспортного средства повышена, двигатель является работающим, а муфта расцепления привода на ведущие колеса сомкнута. SOC аккумуляторной батареи относительно низок и уменьшается, так как DISG выдает положительный крутящий момент в привод на ведущие колеса. Фрикционные тормоза не нажаты, как указано давлением масла в тормозной магистрали, находящимся на низком уровне. Крутящий момент колес является положительным.
В момент Т75времени, водитель отпускает педаль акселератора (не показано). Вскоре после этого, крутящий момент DISG переходит с положительного на отрицательный в ответ на низкий крутящий момент требования водителя с педали акселератора. Посредством перехода на отрицательный крутящий момент, DISG обеспечивает торможение приводом на ведущие колеса для замедления транспортного средства. Кроме того, DISG вырабатывает заряд и подает заряд в аккумуляторную батарею, как указано увеличением SOC аккумуляторной батареи. Давление в тормозной магистрали фрикционных тормозов остается на низком уровне, указывая, что фрикционные тормоза не применяются. Крутящий момент колес переходит с положительного крутящего момента на отрицательный крутящий момент в ответ на DISG, переходящий к выдаче отрицательного крутящего момента. Дополнительно, муфта расцепления привода на ведущие колеса размыкается, и вращение двигателя останавливается. Двигатель останавливается, чтобы экономить топливо, и муфта расцепления размыкается, так что DISG может обеспечивать все торможение приводом на ведущие колеса. Величина торможения приводом на ведущие колеса, которую выдает DISG, может определяться опытным путем и сохраняться в памяти в качестве функции скорости транспортного средства и крутящего момента требования водителя.
В этом примере, водитель не нажимает тормозную педаль после отпускания педали акселератора. Однако, в некоторых примерах, водитель может применять тормоза после отпускания педали акселератора. В таких примерах, давление в тормозной магистрали может возрастать в ответ на команду торможения водителя.
Между моментом T75 времени и моментом T76 времени, отрицательный крутящий момент DISG постепенно возрастает до тех пор, пока не установлен требуемый тормозной момент привода на ведущие колеса. Отрицательный крутящий момент колес также возрастает по мере того, как возрастает тормозной момент привода на ведущие колеса. Водитель не нажимает тормозную педаль, и SOC аккумуляторной батареи возрастает. Муфта расцепления привода на ведущие колеса остается разомкнутой, и двигатель остается в остановленном состоянии.
В момент T76 времени, SOC аккумуляторной батареи достигает пороговой величины (например, полностью заряженной) в ответ на DISG, выдающий заряд в аккумуляторную батарею. Отрицательный крутящий момент DISG уменьшается, и величина заряда, выдаваемого в аккумуляторную батарею, снижается. Давление масла в тормозной магистрали также повышается, так что тормозной момент колес может поддерживаться с помощью фрикционных тормозов. Давление масла в тормозной магистрали повышается на основании уменьшения отрицательного крутящего момента DISG. В одном из примеров, сила фрикционного торможения регулируется на основании крутящего момента колес и уменьшения крутящего момента DISG. В некоторых других примерах, сила фрикционного торможения, прикладываемая для замедления вращения колес, может регулироваться на основании разности между требуемой скоростью транспортного средства и фактической скоростью транспортного средства. Скорость транспортного средства продолжает снижаться, а муфта расцепления привода на ведущие колеса остается разомкнутой. Кроме того, двигатель остается остановленным.
В момент T77 времени, муфта расцепления привода на ведущие колеса смыкается, и двигатель вращается без впрыска топлива в ответ на снижение отрицательного крутящего момента DISG и в ответ на условия эксплуатации. Например, двигатель может вращаться в ответ на уменьшение крутящего момента DISG и время после изменения крутящего момента DISG. Двигатель вращается без топлива, чтобы обеспечивать тормозной момент. И тормозной момент двигателя может регулироваться посредством ввода в действие и вывода из работы клапанов и/или регулирования давления во впускном коллекторе с помощью дросселя и/или клапанов. Давление масла в тормозной магистрали снижается в ответ на тормозной момент привода на ведущие колеса, который обеспечивается двигателем. Более точно, давление масла в тормозной магистрали снижается на величину, которая уменьшает крутящий момент, подаваемый фрикционными тормозами, чтобы эквивалентное торможение транспортного средства обеспечивалось, даже если торможение приводом на ведущие колеса увеличивается посредством вращения двигателя без топлива.
В момент T78 времени, скорость транспортного средства является приближающейся к нулевой скорости. Муфта расцепления привода на ведущие колеса размыкается, и вращение двигателя прекращается в ответ на скорость транспортного средства, уменьшаемую до пороговой скорости транспортного средства. SOC аккумуляторной батареи остается на верхнем уровне, поскольку DISG не выдает положительный крутящий момент в привод на ведущие колеса и не истощает заряд аккумуляторной батареи. Давление масла в тормозной магистрали повышается по мере того, как прекращается торможение двигателем. Повышение давления масла в тормозной магистрали увеличивает силу, приложенную фрикционными тормозами к колесам.
В момент T79 времени, скорость транспортного средства достигает нуля, и крутящий момент колес и давление масла в тормозной магистрали уменьшаются до нуля. В некоторых примерах, давление масла в тормозной магистрали может поддерживаться, когда скорость транспортного средства достигает нуля, так чтобы транспортное средство оставалось на нулевой скорости до тех пор, пока водитель не увеличивает крутящий момент требования водителя посредством педали акселератора. Двигатель остается остановленным, а муфта расцепления привода на ведущие колеса остается в разомкнутом состоянии.
Таким образом, фрикционные тормоза могут применяться для замедления транспортного средства, когда торможение приводом на ведущие колеса уменьшается в ответ на SOC аккумуляторной батареи. Кроме того, вращение двигателя может останавливаться и запускаться, чтобы дополнительно регулировать торможение приводом на ведущие колеса. Фрикционные тормоза могут применяться на основании оцененного крутящего момента колес и/или разности между требуемой скоростью транспортного средства и фактической скоростью транспортного средства.
Таким образом, способы и системы по фиг. 1-3 и 33-34 предусматривают управление торможением транспортного средства, содержащее: выдачу тормозного момента привода на ведущие колеса на транспортное средство без прикладывания фрикционного тормозного момента к транспортному средству; и уменьшение тормозного момента привода на ведущие колеса наряду с увеличением фрикционного тормозного момента у транспортного средства в ответ на состояние заряда устройства накопления энергии, фрикционный тормозной момент увеличивается на такую же величину, на которую уменьшается тормозной момент привода на ведущие колеса. Таким образом, транспортное средство может переходить с торможения приводом на ведущие колеса на фрикционное торможение некоторым образом, который может быть в меньшей степени заметным водителю.
В одном из примеров, способ включает в себя те случаи, когда скорость, с которой снижается тормозной момент привода на ведущие колеса, равна скорости, с которой увеличивается фрикционный тормозной момент. Способ включает в себя те случаи, когда двигатель транспортного средства не является вращающимся наряду с выдачей тормозного момента привода на ведущие колеса на транспортное средство. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса разомкнута наряду с выдачей тормозного момента привода на ведущие колеса. Способ включает в себя те случаи, когда тормозной момент привода на ведущие колеса выдается в ответ на крутящий момент требования водителя, который меньше, чем пороговый крутящий момент. Способ также включает в себя те случаи, когда фрикционный тормозной момент дополнительно повышается в ответ на запрос тормоза водителя.
Способы и системы по фиг. 1-3 и 33-34 также предусматривают торможение транспортного средства, содержащее: выдачу тормозного момента привода на ведущие колеса на транспортное средство без прикладывания фрикционного тормозного момента к транспортному средству; оценку крутящего момента колес транспортного средства; и уменьшение тормозного крутящего момента привода на ведущие колеса наряду с увеличением фрикционного тормозного момента у транспортного средства в ответ на оцененный крутящий момент колес транспортного средства и состояние заряда устройства накопления энергии. Способ включает в себя те случаи, когда фрикционный тормозной момент повышается в ответ на оцененный крутящий момент колес транспортного средства. Способ включает в себя те случаи, когда оцененный крутящий момент колес транспортного средства основан на оцененной массе транспортного средства.
В некоторых примерах, способ включает в себя те случаи, когда оцененный крутящий момент колес транспортного средства основан на ускорении транспортного средства. Способ дополнительно содержит вращение двигателя без снабжения двигателя топливом. Способ дополнительно содержит регулирование фрикционного тормозного момента в ответ на оценку тормозного момента двигателя. Способ включает в себя те случаи, когда двигатель транспортного средства остановлен.
Способы и системы по фиг. 1-3 и 33-34 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; фрикционные тормоза; и контроллер, содержащий постоянные команды, выполняемые для автоматического останова вращения двигателя, выдачи тормозного момента привода на ведущие колеса посредством DISG, и применения фрикционных тормозов наряду с уменьшением тормозного момента привода на ведущие колеса.
В одном из примеров, система транспортного средства включает в себя дополнительные команды для применения фрикционных тормозов на основании оцененного крутящего момента колес. Система транспортного средства дополнительно содержит дополнительные команды для уменьшения тормозного момента привода на ведущие колеса в ответ на состояние заряда устройства накопления энергии. Система транспортного средства включает в себя те случаи, когда тормозной момент привода на ведущие колеса уменьшается в ответ на состояние заряда устройства накопления энергии, являющийся большим, чем пороговая величина заряда. Система транспортного средства включает в себя дополнительные команды для применения фрикционных тормозов на основании скорости транспортного средства. Система транспортного средства включает в себя те случаи, когда фрикционные тормоза применяются посредством давления масла в тормозной магистрали. Система транспортного средства дополнительно содержит дополнительные команды для уменьшения силы прижатия фрикционных тормозов в ответ на нулевую скорость транспортного средства.
Далее, со ссылкой на фиг. 35, блок-схема последовательности операций способа для снижения возмущений крутящего момента привода на ведущие колеса, связанных с люфтом шестерен при переходе от торможения приводом на ведущие колеса к ускорению транспортного средства, в то время как переключение передачи трансмиссии не происходит. Способ по фиг. 35 может храниться в качестве выполняемых команд в постоянной памяти в системе по фиг. 1-3.
На 3502, способ 3500 оценивает, является или нет транспортное средство замедляющимся, или отпустил ли водитель по меньшей мере частично педаль акселератора. Способ 3500 может делать вывод, что транспортное средство является замедляющимся посредством контроля скорости транспортного средства. Способ 3500 может делать вывод, что водитель по меньшей мере частично отпустил педаль акселератора, в ответ на положение педали акселератора. Если способ 3500 делает вывод, что водитель частично отпустил педаль акселератора, или транспортное средство является замедляющимся, ответом является да, и способ 3500 переходит на 3504. Иначе, ответом является нет, и способ 3500 переходит на выход.
На 3504, способ 3500 определяет требуемую величину тормозного момента транспортного средства. Требуемая величина тормозного момента транспортного средства может определяться опытным путем и сохраняться в функции или таблице в памяти, которая индексируется посредством скорости транспортного средства и крутящим моментом требования водителя. Таким образом, тормозной момент транспортного средства может меняться во время замедления транспортного средства. В одном из примеров, тормозной момент транспортного средства является величиной торможения, обеспечиваемой на колесах транспортного средства. Способ 3500 переходит на 3506 после того, как определена требуемая величина тормозного момента транспортного средства.
На 3506, способ 3500 останавливает вращение двигателя и размыкает муфту расцепления привода на ведущие колеса, чтобы сберегать топливо, и так чтобы более высокий уровень торможения приводом на ведущие колеса мог обеспечиваться посредством DISG. Большая величина торможения приводом на ведущие колеса посредством DISG может предоставлять устройству накопления энергии или аккумуляторной батарее возможность подзаряжаться с более высокой скоростью. Муфта гидротрансформатора (TCC) регулируется на блокированное состояние, так чтобы DISG мог снабжаться дополнительной энергией во время замедления транспортного средства. Способ 3500 переходит на 3508 после того, как двигатель остановлен, муфта расцепления привода на ведущие колеса разомкнута, а TCC заблокирована.
На 3508, способ 3500 оценивает, является или нет состояние заряда (SOC) устройства накопления энергии большим, чем пороговая величина заряда. Если способ 3500 делает вывод, что SOC устройства накопления энергии больше, чем пороговый SOC, ответом является да, и способ 3500 переходит на 3512. Иначе, ответом является нет, и способ 3500 переходит на 3510.
На 3510, способ 3500 применяет фрикционные тормоза посредством повышения давления масла в тормозной магистрали. Давление масла в тормозной магистрали может повышаться посредством насоса. Фрикционные тормоза прикладывают силу, которая основана на требуемом тормозном моменте транспортного средства. В одном из примеров, таблица или функция выводит давление масла в тормозной магистрали, которое оценивается для обеспечения силы, которая обеспечивает требуемый тормозной крутящий момент транспортного средства. В некоторых примерах, давление в тормозной магистрали может регулироваться в ответ на оцененный крутящий момент колес или разности между требуемой и фактической скоростью транспортного средства, как описано в материалах настоящего описания. Способ 3500 переходит на выход после того, как отрегулированы фрикционные тормоза.
На 3512, способ 3500 входит в режим рекуперации, где DISG выдает отрицательный крутящий момент привода на ведущие колеса и заряжает устройство накопления энергии. В частности, отрицательный крутящий момент, производимый DISG, регулируется для обеспечения требуемого тормозного момента транспортного средства, в том числе, регулировок для выбора передачи трансмиссии. В одном из примеров, отрицательный крутящий момент DISG может регулироваться посредством регулирования зарядного тока DISG. Способ 3500 переходит на 3514 после того, как отрицательный крутящий момент DISG отрегулирован для обеспечения требуемого тормозного момента транспортного средства.
На 3514, способ 3500 оценивает, был или нет запрошен положительный крутящий момент привода на ведущие колеса. Положительный крутящий момент привода на ведущие колеса может запрашиваться посредством выжимания водителем педали акселератора (например, увеличения крутящего момента требования водителя) или посредством контроллера. Если способ 3500 делает вывод, что положительный крутящий момент привода на ведущие колеса был запрошен, ответом является да, и способ 3500 переходит на 3516. Иначе, ответом является нет, и способ 3500 возвращается на 3508.
На 3516, способ 3500 увеличивает проскальзывание муфты гидротрансформатора (TCC) посредством уменьшения силы прижатия TCC. В одном из примеров, рабочий цикл, подаваемый на электрический исполнительный механизм, уменьшается для снижения силы прижатия TCC. Проскальзывание TCC может увеличиваться до заданной величины определенного опытным путем проскальзывания. В одном из примеров, проскальзывание TCC основано на величине требуемого увеличения крутящего момента привода на ведущие колеса. Способ 3500 переходит на 3518 после того, как увеличено проскальзывание TCC.
На 3518, величина рекуперативного торможения уменьшается посредством отрицательного крутящего момента DISG. Рекуперативный тормозной момент уменьшается по направлению к нулевому выходному крутящему моменту DISG. Способ 3500 переходит на 3520 после начала снижения рекуперативного тормозного момента.
На 3520, способ 3500 оценивает, находится ли рекуперативный тормозной момент в пределах заданного диапазона крутящего момента от нулевого крутящего момента (например, ±2 Н∙м). В одном из примеров, рекуперативный тормозной момент может оцениваться на основании зарядного тока DISG. Если способ 3500 делает вывод, что рекуперативный тормозной момент находится в пределах заданного диапазона крутящего момента от нулевого крутящего момента, ответом является да, и способ 3500 переходит на 3522. Иначе, ответом является нет, и способ 3500 возвращается на 3518, где рекуперативное торможение дополнительно уменьшается.
На 3522, способ 3500 переходит с эксплуатации DISG в режиме регулирования крутящего момента на эксплуатацию DISG в режиме управления скоростью вращения. Скорость вращения DISG устанавливается на скорость вращения, которая является частотой вращения, которая является заданной частотой вращения, большей, чем скорость вращения турбины гидротрансформатора. Поскольку DISG присоединен к насосному колесу гидротрансформатора, скорость вращения насосного колеса гидротрансформатора является большей, чем скорость вращения турбины гидротрансформатора. Посредством регулирования скорости вращения DISG на скорость вращения, большую, чем скорость вращения турбины, небольшой положительный крутящий момент передается через гидротрансформатор на выходной вал трансмиссии. Небольшой положительный крутящий момент устраняет люфт между шестернями трансмиссии и шестернями полуосей, так чтобы мог ослабляться удар между шестернями. DISG дается команда на заданную скорость вращения в течение заданного времени или до тех пор, пока разность скоростей вращения между первой шестерней и второй шестерней не является нулевой. Скорость вращения между шестернями может определяться по скорости вращения входного вала трансмиссии и скорости вращения выходного вала трансмиссии.
Скорость вращения DISG повышается после того, как DISG проработал на заданной скорости вращения в течение заданного времени, или после того, как является нулевой разность скоростей вращения между шестернями. В одном из примеров, скорость вращения DISG повышается на основании модели гидротрансформатора. В частности, скорость вращения турбины гидротрансформатора и требуемая величина крутящего момента для передачи через гидротрансформатор индексируют одну или более функций, которые выводят скорость вращения DISG, которая дает требуемую величину крутящего момента. Требуемая величина крутящего момента основана на крутящем моменте требования водителя. Способ 3500 переходит на 3524 после того, как отрегулирована скорость вращения DISG, и устранен люфт шестерен.
На 3524, способ 3500 остается в режиме управления скоростью вращения, и ток DISG регулируется на основании оцененной величины крутящего момента для запуска двигателя. Как описано ранее, когда DISG находится в режиме управления скоростью вращения, ток, подаваемый в DISG, регулируется на основании ошибки между требуемой частотой вращения DISG и фактической частотой вращения DISG. Дополнительно, на 3524, ток DISG повышается в ответ на смыкание муфты расцепления привода на ведущие колеса, чтобы вращать и запускать двигатель. В одном из примеров, увеличение тока DISG основано на передаточной функции муфты привода на ведущие колеса, которая выводит величину крутящего момента на основании силы прижатия, приложенной к муфте расцепления привода на ведущие колеса. Например, если передаточная функция указывает, что муфта расцепления привода на ведущие колеса является передающей 25 Н∙м при текущей силе прижатия, ток DISG повышается до уровня, который дает дополнительные 25 Н∙м положительного крутящего момента. Сила прижатия муфты расцепления привода на ведущие колеса может придерживаться определенной опытным путем траектории, которая хранится в памяти контроллера. Таким образом, ток разомкнутого контура, основанный на силе прижатия муфты расцепления привода на ведущие колеса, выдается на DISG, так чтобы скорость вращения DISG менялась в меньшей степени, и так чтобы регулятор скорости вращения DISG с разомкнутым контуром мог обеспечивать меньшую поправку скорости вращения. Способ 3500 переходит на 3526 после того, как отрегулированы скорость вращения и крутящий момент DISG.
На 3526, способ 3500 запускает двигатель. Двигатель запускается посредством подачи искры и топлива в двигатель, в то время как двигатель вращается. Двигатель разгоняется до скорости вращения DISG, а затем, смыкается муфта расцепления привода на ведущие колеса. Крутящий момент двигателя и/или крутящий момент DISG выдаются в привод на ведущие колеса после того, как сомкнута муфта расцепления привода на ведущие колеса. DISG также переходит из режима регулирования скорости вращения в режим регулирования крутящего момента после того, как сомкнута муфта расцепления привода на ведущие колеса.
Далее, со ссылкой на фиг. 36, показана примерная последовательность для ослабления удара люфта шестерен привода на ведущие колеса согласно способу по фиг. 35. Последовательность по фиг. 36 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 36 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 3602 представляет скорость вращения насосного колеса гидротрансформатора во время данной последовательности.
Второй график сверху по фиг. 36 представляет крутящий момент положений педалей (например, педали 3606 акселератора (крутящий момент требования водителя) и тормозной педали 3604) в зависимости от времени. Ось Y представляет положение педали, и положение педали увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график по фиг. 36 представляет несущую способность по крутящему моменту муфты гидротрансформатора (TCC) в зависимости от времени. Ось Y представляет несущую способность TCC, и несущая способность TCC возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 36 представляет состояние муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет состояние муфты расцепления привода на ведущие колеса, и состояние муфты расцепления привода на ведущие колеса является полностью прижатым, когда кривая находится на верхнем уровне возле стрелки оси Y. Муфта расцепления привода на ведущие колеса разжимается, когда состояние муфты расцепления привода на ведущие колеса находится возле оси X. Давление прижатия расцепления привода на ведущие колеса возрастает по мере того, как повышается состояние муфты расцепления привода на ведущие колеса. Кроме того, величина крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса, возрастает по мере того, как повышается уровень кривой состояния муфты расцепления привода на ведущие колеса. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 36 представляет собой крутящий момент встроенного в привод на ведущие колеса стартера/генератора DISG в зависимости от времени. Ось Y представляет крутящий момент DISG, и крутящий момент DISG увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Шестой график сверху по фиг. 36 представляет крутящий момент трансмиссии на входном валу трансмиссии в зависимости от времени. Ось Y представляет крутящий момент на входном валу трансмиссии, и крутящий момент на входном валу трансмиссии возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Фиг. 36 показывает одну из примерных операций перезапуска двигателя с модулированной работой муфты гидротрансформатора для управления переходом через область люфта шестерен трансмиссии (например, нулевой крутящий момент внутри трансмиссии) наряду с сохранением передачи трансмиссии. Один из примеров включает в себя способ, где муфта расцепления привода на ведущие колеса вводится в зацепление при резком нажатии педали акселератора (например, придавливании педали акселератора), и где DISG раскручивает двигатель до по меньшей мере скорости вращения проворачивания коленчатого вала (например, 250 оборотов в минуту). Топливоснабжение двигателя и сгорание обеспечивают крутящий момент для разгона двигателя, в то время как скорость вращения двигателя продолжает подниматься посредством крутящего момента DISG (в противоположность запуску типа со стартерным электродвигателем). Такая работа дает быстрый крутящий момент двигателя для приведения в движение транспортного средства. Однако, поскольку такое быстрое повышение крутящего момента может вызывать глухой звук на протяжении зоны люфта шестерен, муфта гидротрансформатора по меньшей мере частично размыкается и, по выбору, модулируется для управления переходом через зону люфта шестерен и снижения скорости подъема крутящего момента колес, до после перехода через зону люфта шестерен. Дополнительно, крутящий момент на выходном валу DISG может регулироваться для управления выходным крутящим моментом привода на ведущие колеса во время перехода через зону люфта шестерен.
Далее описаны дополнительные подробности регулировок, производимых в отношении прохождения люфта шестерен, которые могут использоваться при управлении прохождением люфта, описанном выше. Как пояснено в материалах настоящего описания, двигатель может быть выключен, а муфта расцепления привода на ведущие колеса разомкнута, когда транспортное средство останавливается, остановлено или движется/едет, когда крутящий момент от DISG достаточен для разгона транспортного средства и удовлетворения требуемого крутящего момента, преодоления дорожной нагрузки, как показано в момент T80времени.
Более точно, во время событий, когда водитель не является запрашивающим крутящий момент привода на ведущие колеса (например, события закрытой педали акселератора), и двигатель не является вращающимся, DISG может эксплуатироваться в качестве генератора, обеспечивая рекуперацию, вместо или в дополнение к колесному торможению, которое запрошено водителем благодаря приведению в действие тормозной педали. Таким образом, DISG замещает торможение приводом на ведущие колеса, которое присутствовало бы, если бы вращался двигатель. DISG подзаряжает аккумуляторную батарею или подает электрическую энергию на вспомогательные устройства в зависимости от SOC аккумуляторной батареи. Затем, когда водитель запрашивает дополнительную выходную мощность, нажимая педаль акселератора, двигатель может перезапускаться, чтобы дополнять и/или заменять крутящий момент на выходном валу DISG. Такие переходы включают в себя прохождение через область люфта шестерен трансмиссии (например, в трансмиссии или узле главной передачи трансмиссии, и/или в заднем дифференциале трансмиссии). Более точно, как отмечено ранее в материалах настоящего описания, когда водитель нажимает педаль акселератора во время торможения приводом на ведущие колеса, положительный крутящий момент DISG и двигателя прикладывается к приводу на ведущие колеса, и привод на ведущие колеса испытывает обращение крутящего момента (например, переход крутящего момента с отрицательного на положительный). Обращение крутящего момента заставляет привод на ведущие колеса переходить зону люфта (например, межзубный интервал зубчатой передачи в заднем дифференциале).
В момент T81 времени, тормозная педаль отпускается водителем, и несущая способность TCC снижается, как указано снижением кривой несущей способности TCC. Кроме того, отрицательный крутящий момент DISG уменьшается до нулевого крутящего момента в ответ на меньшее торможение приводом на ведущие колеса, которое вызывается в результате отпускания тормозной педали. Крутящий момент на входном валу трансмиссии также уменьшается в ответ на снижение крутящего момента DISG.
В момент T82 времени, водитель выжимает педаль акселератора, тем самым запрашивая увеличение положительного крутящего момента привода на ведущие колеса. Вскоре после этого, крутящий момент DISG меняется с отрицательного на положительный, и несущая способность TCC уменьшается посредством увеличения проскальзывания TCC. Муфта расцепления привода на ведущие колеса также начинает смыкаться в ответ на увеличение положения педали акселератора. Смыкание муфты расцепления привода на ведущие колеса начинает разгонять двигатель. Крутящий момент на входном валу трансмиссии постепенно уменьшается от небольшого отрицательного крутящего момента до нулевого крутящего момента. Между моментом T82 времени и моментом T83, несущая способность TCC уменьшается в ответ на увеличение разности между скоростью зуба первой шестерни и зуба второй шестерни. Разность скорости вращения между зубьями шестерен происходит вследствие обращения крутящего момента привода на ведущие колеса.
В момент T83 времени, разность скоростей от зуба шестерни к зубу шестерни между шестернями находится своем наибольшем уровне, а затем, начинает снижаться по мере того, как уменьшается люфт шестерен. Несущая способность TCC увеличивается в ответ на уменьшение разности скоростей зубьев шестерен между шестернями. Крутящий момент DISG также увеличивается в ответ на уменьшение разности скоростей между зубьями шестерен, так что люфт может уменьшаться. Состояние муфты расцепления привода на ведущие колеса продолжает возрастать, указывая, что величина крутящего момента, к передаче которого способна муфта расцепления привода на ведущие колеса, возрастает. Положение педали акселератора и скорость транспортного средства также продолжают возрастать.
В момент T84 времени, скорость вращения двигателя достигает скорости вращения насосного колеса гидротрансформатора (такой же как скорость вращения DISG). Несущая способность TCC и муфты расцепления привода на ведущие колеса также увеличивается в ответ на скорость вращения двигателя, достигающая скорости вращения насосного колеса гидротрансформатора. Посредством ожидания до тех пор, пока скорость вращения двигателя не равна скорости вращения насосного колеса гидротрансформатора, для смыкания муфты расцепления привода на ведущие колеса, может быть возможным уменьшать возмущения крутящего момента в приводе на ведущие колеса. Крутящий момент на входном валу трансмиссии переходит с отрицательного крутящего момента на положительный крутящий момент в ответ на увеличение крутящего момента привода на ведущие колеса. Крутящий момент DISG также одновременно повышается после того, как крутящий момент на входном валу трансмиссии переходит на положительный крутящий момент в ответ на полное смыкание муфты расцепления привода на ведущие колеса.
Примерный подход этой последовательности распознает несколько явно не связанных фрагментов информации, в том числе (1) крутящий момент двигателя и DISG являются аддитивными, когда муфта 236 расцепления привода на ведущие колеса сомкнута; (2) вследствие компоновочных ограничений, в особенности связанных с ограничениями на длину и диаметр передачи на ведущие колеса, несущая способность по крутящему моменту DISG имеет тенденцию быть значительно более низкой, чем максимальный крутящий момент двигателя; (3) крутящий момент DISG является функцией скорости вращения DISG, которая равна числу оборотов двигателя, когда муфта полностью сомкнута; и (4) крутящий момент DISG относительно постоянен вплоть до пороговой скорости вращения ротора приблизительно 1000±100 оборотов в минуту, а затем, крутящий момент DISG обратно пропорционален скорости вращения DISG, указываемой ссылкой как область постоянной мощности, до тех пор, пока потери на трение, вихревые токи и другие потери не заставляют крутящий момент уменьшаться быстрее с повышением скорости вращения ротора с более высокой пороговой частотой вращения (например, около 3000±500 оборотов в минуту).
Таким образом, если силовая передача является работающей в режиме рекуперативного торможения, во время события закрытой педали (например, не нажатой педали акселератора) при отключенном двигателе, и затем водитель нажимает педаль акселератора. Двигатель может оставаться отключенным, если DISG способен к выдаче требуемого крутящего момента. В таком случае, муфта расцепления привода на ведущие колеса может оставаться разомкнутой, и DISG может быстро переводиться на почти нулевой крутящий момент. DISG работает в режиме управления скоростью вращения и медленно переходит зону люфта шестерен. DISG быстро повышает выходной крутящий момент после перехода через область люфта шестерен, чтобы обеспечивать требуемый крутящий момент. Таким образом, слышимый шум и импульсы крутящего момента через трансмиссию могут уменьшаться во время перехода крутящего момента привода на ведущие колеса с отрицательного крутящего момента на положительный крутящий момент.
Таким образом, способы и системы по фиг. 1-3 и 35-36 предусматривают приведение в действие привода на ведущие колеса, содержащее: остановку вращения двигателя и обеспечение рекуперативного торможения посредством привода на ведущие колеса; переход с рекуперативного торможения на выдачу положительного крутящего момента в привод на ведущие колеса; и приведение в действие встроенного в привод на ведущие колеса стартера/генератора в режиме управления скоростью вращения во время перехода. Способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор приводится в действие в режиме регулирования крутящего момента до и после приведения в действие встроенного в привод на ведущие колеса стартера/генератора в режиме управления скоростью вращения. Способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор регулируется на скорость вращения, основанную на скорости вращения турбины гидротрансформатора.
В одном из примеров, способ дополнительно содержит размыкание муфты расцепления привода на ведущие колеса, когда двигатель остановлен. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса для запуска двигателя после приведения в действие встроенного в привод на ведущие колеса стартера/генератора в режиме управления скоростью вращения. Способ включает в себя те случаи, когда рекуперативное торможение предусмотрено, когда состояние заряда устройства накопления энергии меньше, чем пороговый заряд. Способ дополнительно содержит увеличение проскальзывания муфты гидротрансформатора во время перехода с рекуперативного торможения на выдачу положительного крутящего момента в привод на ведущие колеса.
Способы и системы по фиг. 1-3 и 35-36 предусматривают приведение в действие привода на ведущие колеса, содержащее: остановку вращения двигателя и обеспечение рекуперативного торможения посредством встроенного в привод на ведущие колеса стартера/генератора; осуществление перехода встроенного в привод на ведущие колеса стартера/генератора с обеспечения рекуперативного торможения на выдачу положительного крутящего момента в привод на ведущие колеса; и регулирование проскальзывания муфты гидротрансформатора в ответ на переход с обеспечения рекуперативного торможения на выдачу положительного крутящего момента в привод на ведущие колеса. Способ дополнительно содержит приведение в действие встроенного в привод на ведущие колеса стартера/генератора в режиме управления скоростью вращения во время перевода встроенного в привод на ведущие колеса стартера/генератора с обеспечения рекуперативного торможения на выдачу положительного крутящего момента в привод на ведущие колеса.
В одном из примеров, способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор приводится в действие на скорости вращения, которая является заданной частотой вращения, большей, чем скорость вращения турбины гидротрансформатора. Способ дополнительно содержит увеличение скорости вращения в ответ на уменьшение люфта шестерен. Способ включает в себя те случаи, когда регулирование проскальзывания гидротрансформатора включает в себя увеличение проскальзывания гидротрансформатора. Способ включает в себя те случаи, когда перевод встроенного в привод на ведущие колеса стартера/генератора из обеспечения рекуперативного торможения на выдачу положительного крутящего момента в привод на ведущие колеса происходит в ответ на увеличение потребления крутящего момента. Способ дополнительно содержит запуск двигателя посредством смыкания муфты расцепления привода на ведущие колеса наряду с регулированием проскальзывания муфты гидротрансформатора.
Способы и системы по фиг. 1-3 и 35-36 также предусматривают систему транспортного средства, содержащую: двигатель; электрическую машину; муфту расцепления привода на ведущие колеса, расположенную в приводе на ведущие колеса между двигателем и электрической машиной; трансмиссию; гидротрансформатор, расположенный в приводе на ведущие колеса между электрической машиной и трансмиссией; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти для уменьшения люфта шестерен в трансмиссии посредством приведения в действие электрической машины в режиме управления скоростью вращения и регулирования скорости вращения электрической машины. Система транспортного средства дополнительно содержит муфту гидротрансформатора и дополнительные выполняемые команды для осуществления проскальзывания муфты гидротрансформатора, когда электрическая машина приводится в действие в режиме управления скоростью вращения.
В некоторых примерах, система транспортного средства дополнительно содержит дополнительные выполняемые команды для приведения в действие электрической машины на заданной скорости вращения, которая является большей, чем скорость вращения турбины гидротрансформатора. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для увеличения скорости вращения электрической машины после приведения в действие электрической машины на заданной скорости вращения. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для обеспечения тормозного момента привода на ведущие колеса посредством электрической машины. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для уменьшения тормозного момента привода на ведущие колеса до нулевого крутящего момента перед приведением в действие электрической машины в режиме управления скоростью вращения.
Далее, со ссылкой на фиг. 37, показан примерный способ для входа в дрейфовый режим работы привода на ведущие колеса. Способ по фиг. 37 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
В одном из примеров, дрейфовый режим может отличаться сжиганием топливно-воздушной смеси в двигателе, в то время как муфта расцепления привода на ведущие колеса разомкнута, так что двигатель по существу не выдает крутящий момент (например, меньший чем ±5 Н∙м) на DISG, гидротрансформатор и трансмиссию. Дрейфовый режим может включать в себя дрейфовую скорость вращения холостого хода, которая является более низкой скоростью вращения, чем базовая скорость вращения холостого хода, на котором работает двигатель, если двигатель присоединен к приводу на ведущие колеса через сомкнутую муфту расцепления привода на ведущие колеса. Скорость вращения холостого хода в дрейфовом режиме является более низким, так что топливо может сберегаться, в то время как в дрейфовом режиме. Кроме того, установка момента зажигания в дрейфовом режиме может подвергаться опережению в большей степени, чем установка момента зажигания, когда двигатель является работающим на базовой скорости вращения холостого хода, а муфта расцепления привода на ведущие колеса сомкнута. Базовая скорость вращения холостого хода может быть описана как скорость вращения холостого хода двигателя, когда двигатель прогрет и никакие вспомогательные нагрузки не приложены к двигателю, и когда двигатель присоединен к DISG через муфту расцепления привода на ведущие колеса. Двигатель может эксплуатироваться на более низкой скорости вращения двигателя и с большим опережением зажигания в дрейфовом режиме, чем во время условий, в которых используется базовая скорость вращения холостого хода, так как может быть необходимым меньший резервный крутящий момент для противодействия переходным нагрузкам, которые могут прикладываться к приводу на ведущие колеса.
На 3702, способ 3700 определяет условия эксплуатации. Условия эксплуатации двигателя могут включать в себя, но не в качестве ограничения, потребление крутящего момента привода на ведущие колеса, состояние муфты расцепления привода на ведущие колеса, скорость вращения двигателя, скорость транспортного средства, крутящий момент DISG и состояние заряда аккумуляторной батареи. Способ 3700 переходит на 3704 после того, как определены условия эксплуатации.
На 3704, способ 3700 оценивает, является или нет требуемый крутящий момент привода на ведущие колеса большим, чем пороговая величина крутящего момента, которая может обеспечиваться в привод на ведущие колеса посредством DISG. Пороговая величина крутящего момента может быть слегка меньшей (например, меньшей на 10%), чем номинальный крутящий момент DISG. В одном из примеров, имеющаяся в распоряжении величина крутящего момента DISG может оцениваться по определенным опытным путем значениям, хранимым в таблице, которая индексируется частотой вращения DISG и температурой DISG. Таблица выводит максимальную или имеющуюся в распоряжении величину крутящего момента, который может обеспечиваться в привод на ведущие колеса посредством DISG. В других примерах, имеющийся в распоряжении или пороговый крутящий момент DISG меньше, чем максимальный крутящий момент DISG, так что двигатель может удерживаться в дрейфовом режиме, если требуемый крутящий момент привода на ведущие колеса приближается к максимальному крутящему моменту DISG. Кроме того, пороговый крутящий момент DISG может возрастать или убывать в ответ на условия эксплуатации, такие как температура DISG. Способ 3700 сравнивает входные данные из таблицы с требуемой величиной крутящего момента привода на ведущие колеса. Если способ 3700 делает вывод, что требуемый крутящий момент привода на ведущие колеса больше, чем пороговый крутящий момент DISG, ответом является да, и способ 3700 переходит на 3706. Иначе, ответом является нет, и способ 3700 переходит на 3716.
На 3706, способ 3700 смыкает муфту расцепления привода на ведущие колеса, чтобы вращать и запустить двигатель. Муфта расцепления привода на ведущие колеса может смыкаться согласно заданной траектории смыкания, которая хранится в памяти. В качестве альтернативы, двигатель может запускаться посредством стартера, иного чем DISG, и муфта расцепления привода на ведущие колеса смыкается после того, как двигатель разгоняется до скорости вращения DISG. Проскальзывание муфты гидротрансформатора также может повышаться, с тем чтобы уменьшать возмущения крутящего момента привода на ведущие колеса в ответ на требуемый крутящий момент. Способ 3700 переходит на 3708 после того, как муфта расцепления привода на ведущие колеса начинает смыкание.
На 3708, способ 3700 подает топливо в двигатель, и двигатель запускается, если он не является сжигающим топливно-воздушную смесь. Топливо и искра выдаются в цилиндры двигателя, чтобы содействовать сгоранию внутри двигателя. Способ 3700 переходит на 3710 после того, как начинается вращение двигателя.
На 3710, способ 3700 оценивает, является или нет состояние заряда устройства накопления энергии (например, аккумуляторной батареи) большим, чем пороговая величина. В одном из примеров, состояние заряда аккумуляторной батареи может оцениваться по напряжению аккумуляторной батареи. Если способ 3700 делает вывод, что состояние заряда аккумуляторной батареи больше, чем пороговая величина, ответом является да, и способ 3700 переходит на 3714. Иначе, ответом является нет, и способ 3700 переходит на 3712.
На 3714, способ 3700 управляет двигателем и DISG, чтобы обеспечивать требуемую величину крутящего момента привода на ведущие колеса. Доля крутящего момента, выдаваемого каждым из двигателя и DISG, может меняться в зависимости от условий эксплуатации. Например, если состояние заряда аккумуляторной батареи является низким, большая часть крутящего момента привода на ведущие колеса может обеспечиваться скорее двигателем, нежели DISG. Величина крутящего момента, выдаваемого в привод на ведущие колеса двигателем, может оцениваться согласно способу, описанному в патенте США № 7066121, который настоящим фактически полностью включен в состав. Величина крутящего момента, выдаваемая в привод на ведущие колеса посредством DISG, может оцениваться по определенной опытным путем таблице, которая индексируется с помощью тока и скорости вращения DISG. Способ 370 переходит на выход после того, как крутящий момент выдан в привод на ведущие колеса через двигатель и DISG.
На 3712, способ 3700 управляет двигателем без управления DISG, чтобы обеспечивать требуемый крутящий момент в привод на ведущие колеса. Кроме того, в некоторых примерах, DISG может переводиться в режим зарядки аккумуляторной батареи, где механическая энергия от двигателя преобразуется в электрическую энергию посредством DISG и накапливается в устройстве накопления электрической энергии. В одном из примеров, количество воздуха двигателя и количество топлива двигателя регулируются, чтобы обеспечивать требуемую величину крутящего момента привода на ведущие колеса. Например, если требуемая величина крутящего момента привода на ведущие колеса повышается, количество воздуха и топлива, подаваемых в цилиндры двигателя, увеличивается. Способ 3700 переходит на выход после того, как работа двигателя отрегулирована для подачи требуемой величины крутящего момента в привод на ведущие колеса.
На 3716, способ 3700 оценивает, является или нет двигатель работающим и сжигающим топливно-воздушные смеси в цилиндрах двигателя. В одном из примеров, двигатель может определяться сжигающим топливно-воздушные смеси, когда крутящий момент двигателя возрастает, как может подтверждаться увеличением скорости вращения двигателя. Если способ 3700 делает вывод, что двигатель является сжигающим топливно-воздушные смеси и работающим, ответом является да, и способ 3700 переходит на 3730. Иначе, ответом является нет, и способ 3700 переходит на 3718.
На 3718, способ 3700 оценивает, является или нет состояние заряда аккумуляторной батареи большим, чем пороговая величина. В одном из примеров, напряжение аккумуляторной батареи является основой для оценки состояния заряда аккумуляторной батареи. Если способ 3700 делает вывод, что состояние заряда аккумуляторной батареи больше, чем пороговая величина, ответом является да, и способ 3700 переходит на 3724. Иначе, ответом является нет, и способ 3700 переходит на 3720.
На 3724, способ 3700 выдает требуемый крутящий момент привода на ведущие колеса через DISG и без крутящего момента из двигателя. Ток подается на DISG на основании таблицы, хранимой в памяти, которая выводит величину тока DISG на основании требуемого крутящего момента DISG и температуры DISG. Значения в таблице могут определяться опытным путем. Способ 3700 переходит на выход после того, как крутящий момент DISG выдан в привод на ведущие колеса.
На 3720, способ 3700 вращает и запускает двигатель. Двигатель может вращаться посредством стартерного электродвигателя, иного чем DISG, или посредством DISG. Если двигатель вращается посредством DISG, муфта расцепления привода на ведущие колеса смыкается для передачи крутящего момента с DISG на двигатель. Двигатель запускается посредством подачи топлива и искры в цилиндры двигателя после того, как двигатель достигает скорости вращения проворачивания коленчатого вала. Скорость вращения проворачивания коленчатого вала двигателя может меняться для разных условий эксплуатации. Например, если двигатель вращается стартерным электродвигателем, иным чем DISG, скорость вращения проворачивания коленчатого вала является скоростью вращения, меньшим, чем 250 оборотов в минуту. Однако, если двигатель вращается посредством DISG, скорость вращения проворачивания коленчатого вала может быть скоростью вращения, меньшим, чем 1200 оборотов в минуту. Способ 3700 переходит на 3722 после того, как двигатель вращается и запускается.
На 3722, способ 3700 начинает подачу по меньшей мере части крутящего момента двигателя на колеса транспортного средства и начинает зарядку аккумуляторной батареи, чтобы повышать состояние заряда аккумуляторной батареи. Муфта расцепления привода на ведущие колеса сомкнута, когда двигатель выдает крутящий момента на колеса транспортного средства и заряжает аккумуляторную батарею. Кроме того, выходной крутящий момент двигателя регулируется для обеспечения требуемой величины крутящего момента привода на ведущие колеса. Выходной крутящий момент двигателя может увеличиваться или уменьшаться посредством регулирования количества воздуха цилиндров и количества топлива цилиндров. Способ 3700 переходит на выход после того, как по меньшей мере часть выходной мощности двигателя подается на колеса транспортного средства.
На 3730, способ 3700 оценивает, присутствуют или нет выбранные условия для входа в дрейфовый режим. В одном из примеров, дрейфовый режим может начинаться, когда температура двигателя является большей, чем пороговая температура. Кроме того, другие условия эксплуатации, такие как скорость вращения двигателя и запрошенный крутящий момент, могут оцениваться для определения, может ли быть начат дрейфовый режим. Дополнительно, в некоторых примерах, дрейфовый режим может начинаться, когда состояние заряда аккумуляторной батареи меньше, чем пороговое состояние заряда.
Например, дрейфовый режим также может начинаться, когда температура каталитического нейтрализатора ниже порогового значения, и в других условиях. Контроллер может предпочесть поддерживать двигатель на холостом ходу вместо отключения двигателя, так как выбросы могут возрастать, если двигатель запускается с холодными каталитическими нейтрализаторами. Контроллер может предпочесть поддерживать двигатель на холостом ходу вместо смыкания муфты расцепления привода на ведущие колеса и эксплуатации двигателя для снижения крутящего момента, если SOC аккумуляторной батареи высок, и/или текущая рабочая точка требовалась бы, чтобы вынуждать двигатель работать в низкой точке эффективности по топливу.
Дрейфовый режим также может начинаться, когда бачок для паров топлива требует продувки. Контроллер может предпочесть поддерживать двигатель на холостом ходу вместо отключения двигателя, так как запланировано, что должна выполняться продувка паров топлива. Контроллер также может предпочесть поддерживать двигатель на холостом ходу вместо смыкания муфты расцепления привода на ведущие колеса и эксплуатации двигателя для снижения крутящего момента, если SOC аккумуляторной батареи высок, и/или текущая рабочая точка требовалась бы, чтобы вынуждать двигатель работать в низкой точке эффективности по топливу.
Дрейфовый режим также может начинаться, когда требуется увеличение разрежения усилителя тормозов. Контроллер может предпочесть поддерживать двигатель на холостом ходу вместо отключения двигателя, так как требуется разрежение, и двигатель приводится в действие для обеспечения разрежения.
Дрейфовый режим может начинаться, когда низка температура охлаждающей жидкости (ECT). Контроллер может предпочесть поддерживать двигатель на холостом ходу вместо отключения двигателя, так как низка ECT.
Дрейфовый режим может начинаться, когда требуется более быстрая реакция на резкое нажатие педали акселератора для спортивного режима вождения. Контроллер может предпочесть поддерживать двигатель на холостом ходу вместо отключения двигателя, так как режим вождения был определен или выбран в качестве спортивного режима. Реакция на резкие нажатия педали акселератора водителем будет более быстрой с двигателем на дрейфовом холостом ходу взамен того, если двигатель остановлен.
Если способ 3700 делает вывод, что выбранные условия присутствуют для предоставления возможности входа в дрейфовый режим, ответом является да, и способ 3700 переходит на 3732. Иначе, ответом является нет, и способ 3700 переходит на 3718.
На 3732, способ 3700 размыкает муфту расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса размыкается, так чтобы какой бы то ни было крутящий момент, вырабатываемый двигателем, не подавался на оставшуюся часть привода на ведущие колеса, в том числе, DISG, гидротрансформатор и трансмиссию. Размыкание муфты расцепления привода на ведущие колеса предоставляет двигателю возможность эксплуатироваться в более эффективном рабочем состоянии, чем если бы двигатель был присоединен к DISG, гидротрансформатору и трансмиссии, поскольку двигатель может эксплуатироваться с меньшим резервом крутящего момента. В одном из примеров, резерв крутящего момента двигателя может характеризоваться как величина крутящего момента, которая имеется в распоряжении из двигателя, когда двигатель является работающим на конкретной скорости вращения и количестве воздуха, не выдавая полную величину имеющегося в распоряжении крутящего момента двигателя.
Например, двигатель может быть вырабатывающим 100 Н∙м крутящего момента на 1200 оборотов в минуту и с предписанным количеством воздуха цилиндра. Однако, величина крутящего момента двигателя, имеющегося в распоряжении на 1200 оборотах в минуту, когда двигатель является вводящим предписанное количество воздуха цилиндров, может иметь значение Н∙м. Разница в 25 Н∙м может объясняться двигателем, работающим с установкой момента зажигания, которая подвергнута запаздыванию от установки момента зажигания MBT. 25 Н∙м представляют собой резерв крутящего момента, который может удерживаться, чтобы компенсировать возмущения крутящего момента, которые могут подаваться на двигатель. Однако, 25 Н∙м также представляют собой потерю коэффициента полезного действия двигателя, обусловленную запаздыванием зажигания. Двигатель может эксплуатироваться с меньшим резервом крутящего момента, когда муфта расцепления привода на ведущие колеса разомкнута, поскольку меньшие возмущения крутящего момента могут прикладываться к двигателю через привод на ведущие колеса. Способ 3700 переходит на 3734 после того, как муфта расцепления привода на ведущие колеса разомкнута.
На 3734, способ 3700 оценивает, находится или нет требуемый крутящий момент привода на ведущие колеса в пределах порогового диапазона от порогового значения крутящего момента DISG. Пороговое значение крутящего момента DISG может представлять собой максимальную величину крутящего момента, имеющегося в распоряжении из DISG, или величину крутящего момента, которая меньше, чем суммарная величина имеющегося в распоряжении крутящего момента DISG. Если способ 3700 делает вывод, что требуемый крутящий момент привода на ведущие колеса находится в пределах порогового диапазона крутящего момента от порогового значения крутящего момента DISG, ответом является да, и способ 3700 переходит на 3736. Иначе, ответом является нет, и способ 3700 переходит на 3738.
На 3736, способ 3700 управляет двигателем на дрейфовой скорости вращения холостого хода и регулирует установку момента зажигания двигателя и установку фаз клапанного распределения для улучшения коэффициента полезного действия двигателя и экономии топлива. Требуемый крутящий момент привода на ведущие колеса выдается DISG, когда муфта расцепления привода на ведущие колеса находится в разомкнутом состоянии. Дрейфовая скорость вращения холостого хода может находиться ниже, чем базовая скорость вращения холостого хода, когда двигатель присоединен к DISG и трансмиссии. Кроме того, установка момента зажигания, в то время как двигатель эксплуатируется на дрейфовой скорости вращения холостого хода, может подвергаться опережению по сравнению с тем, когда двигатель эксплуатируется на базовой скорости вращения холостого хода. Базовая скорость вращения холостого хода может применяться, когда требуемый крутящий момент привода на ведущие колеса низок, и когда двигатель присоединен к оставшейся части привода на ведущие колеса через сомкнутую муфту привода на ведущие колеса расцепления. Установка фаз клапанного распределения может регулироваться, чтобы эксплуатировать двигатель с улучшенным коэффициентом наполнения. В одном из примеров, установка фаз клапанного распределения регулируется, чтобы установка фаз распределения впускных клапанов осуществляла закрытие позже, для увеличения давления во впускном коллекторе двигателя, в то время как заряд воздуха цилиндра относительно низок. Способ 3700 переходит на выход после того, как двигатель входит в дрейфовый режим на 3736.
На 3738, способ 3700 оценивает, присутствует или нет стартер, иной чем DISG, в системе. В некоторых примерах, способ 3700 может делать вывод, что стартер, иной чем DISG, не присутствует, если стартер, иной чем DISG, подвергнут ухудшению характеристик. Способ 3700 также может делать вывод, что стартер, иной чем DISG, присутствует, когда бит присутствия стартера установлен в памяти. Если способ 3700 делает вывод, что стартер, иной чем DISG, присутствует, ответом является да, и способ 3700 переходит на 3740. Иначе, ответом является нет, и способ 3700 переходит на 3740.
На 3740, способ 3700 останавливает вращение двигателя, и требуемый крутящий момент привода на ведущие колеса выдается посредством DISG. Вращение двигателя останавливается посредством прекращения потока топлива и искры в цилиндры двигателя Двигатель останавливается на 3740, так что дополнительное топливо может сберегаться, и так как двигатель может перезапускаться без крутящего момента из DISG. Таким образом, большая величина крутящего момента DISG может подаваться в привод на ведущие колеса, так как часть имеющегося в распоряжении крутящего момента DISG не должна удерживаться в резерве для перезапуска двигателя. Способ 3700 переходит на выход после того, как двигатель остановлен.
На 3742, способ 3700 оценивает, находится или нет крутящий момент на выходном валу DISG в пределах диапазона пороговых значений крутящего момента проворачивания коленчатого вала двигателя (например, величины крутящего момента для раскручивания двигателя от нулевой скорости вращения до скорости вращения проворачивания коленчатого вала, меньшего чем 250 оборотов в минуту). Например, если крутящий момент проворачивания коленчатого вала двигателя имеет значение 40 Н∙м, а диапазоном пороговых значений являются 5 Н∙м, DISG находится в диапазоне пороговых значений крутящего момента проворачивания коленчатого вала двигателя, когда крутящий момент на выходном валу DISG имеет значение 35,5 Н∙м. Если способ 3700 делает вывод, что крутящий момент на выходном валу DISG находится в пределах диапазона пороговых крутящих моментов крутящего момента проворачивания коленчатого вала двигателя, ответом является да,и способ 3700 переходит на 3744. Иначе, ответом является нет, и способ 3700 переходит на 3746.
На 3746, способ 3700 останавливает вращение двигателя и выдает требуемый крутящий момент привода на ведущие колеса посредством DISG. Двигатель останавливается, чтобы дополнительно снижать расход топлива. Поскольку DISG имеет достаточную величину крутящего момента, имеющегося в распоряжении для перезапуска двигателя, двигатель может быть остановлен. Если требуемый крутящий момент привода на ведущие колеса возрастает, в то время как двигатель остановлен, двигатель может перезапускаться посредством DISG до того, как DISG не имеет достаточную несущую способность по крутящему моменту для запуска двигателя и обеспечения требуемого крутящего момента привода на ведущие колеса. Однако, в некоторых примерах, двигатель может продолжать работать на холостом ходу на скорости вращения холостого хода дрейфового режима, если состояние заряда аккумуляторной батареи меньше, чем пороговое значение, и транспортному средству требуется дополнительное разрежение, продувка паров топлива, более высокая температура каталитического нейтрализатора или более высокая температура двигателя. Способ 3700 переходит на выход после того, как двигатель остановлен.
На 3744, способ 3700 эксплуатирует двигатель на дрейфовой скорости вращения холостого хода, регулирует установку момента зажигания, установку фаз клапанного распределения и выдает крутящий момент привода на ведущие колеса посредством DISG, как описано на 3736. Способ 3700 переходит на выход после того, как двигатель входит в дрейфовый режим.
Должно быть отмечено, что, когда водитель уменьшает крутящий момент требования водителя (например, отпускает педаль акселератора или уменьшает входной сигнал акселератора), привод на ведущие колеса может действовать, как изложено ниже, согласно способу по фиг. 37. Крутящий момент может обеспечиваться из двигателя в привод на ведущие колеса, присоединенный к колеса транспортного средства, когда крутящий момент требования водителя больше, чем пороговый крутящий момент DISG. Скорость вращения двигателя может уменьшаться до скорости вращения холостого хода дрейфового режима, а двигатель отсоединяться от привода на ведущие колеса в ответ на уменьшение крутящего момента требования водителя. DISG может входить в режим рекуперации, выдавая заряд в аккумуляторную батарею и обеспечивая постоянный темп замедления для транспортного средства. В одном из примеров, пороговый крутящий момент DISG больше, чем 75% номинального крутящего момента DISG.
Должно быть отмечено, что, когда водитель увеличивает крутящий момент требования водителя (например, резко нажимает педаль акселератора или увеличивает входной сигнал акселератора), привод на ведущие колеса может действовать, как изложено ниже, согласно способу по фиг. 37. Двигатель может разгоняться с дрейфовой скорости вращения холостого хода до скорости вращения DISG в ответ на увеличивающийся крутящий момент требования водителя. Муфта расцепления привода на ведущие колеса может смыкаться в ответ на скорость вращения двигателя, достигающую скорости вращения DISG.
Должно быть отмечено, что, когда водитель увеличивает крутящий момент требования водителя (например, резко нажимает педаль акселератора или увеличивает входной сигнал акселератора) во время пуска в ход транспортного средства, привод на ведущие колеса может действовать, как изложено ниже, согласно способу по фиг. 37. Крутящий момент DISG выдается в привод на ведущие колеса, в то время как двигатель не является вращающимся, в ответ на крутящий момент требования водителя. Двигатель может запускаться и эксплуатироваться на холостом ходу при скорости вращения холостого хода дрейфового режима, не выдавая крутящий момент двигателя в привод на ведущие колеса, в ответ на крутящий момент требования водителя, находящийся в пределах диапазона пороговых значений от крутящего момента проворачивания коленчатого вала двигателя (например, крутящий момент DISG имеет значение, большее чем 75% крутящего момента проворачивания коленчатого вала двигателя). Двигатель может разгоняться в режиме управления скоростью вращения, чтобы по существу соответствовать скорости вращения DISG (например, ±50 оборотов в минуту), и муфта расцепления привода на ведущие колеса может смыкаться, когда скорость вращения двигателя по существу совпадает с частотой вращения DISG (например, ±50 оборотов в минуту). В некоторых примерах, скорость вращения двигателя может придерживаться скорости вращения DISG, когда требуемый крутящий момент находится между крутящим моментом проворачивания коленчатого вала двигателя и пороговым крутящим моментом DISG (например, крутящим моментом между 75% номинального крутящего момента DISG и номинальным крутящим моментом DISG).
Кроме того, на 3736 и 3744, двигатель может приводиться в действие в режиме управления скоростью вращения, чтобы придерживаться скорости вращения DISG, когда требуемый крутящий момент привода на ведущие колеса находится в пределах заданного диапазона крутящих моментов от порогового крутящего момента DISG. Посредством отслеживания скорости вращения DISG, муфта расцепления привода на ведущие колеса может смыкаться раньше, с тем чтобы улучшать характеристику привода на ведущие колеса.
Таким образом, способ по фиг. 37 предусматривает эффективный режим работы двигателя, который может снижать расход топлива двигателя по сравнению с двигателем, работающим на базовой скорости вращения холостого хода. Кроме того, способ по фиг. 37 предусматривает останов двигателя, когда может сберегаться дополнительное топливо. Дополнительно, способ поддерживает характеристику крутящего момента привода на ведущие колеса, даже если двигатель может приводиться в действие более эффективно или останавливаться.
Далее, со ссылкой на фиг. 38, показан примерный способ для выхода из дрейфового режима работы привода на ведущие колеса. Способ по фиг. 38 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
На 3802, способ 3800 определяет условия эксплуатации. Условия эксплуатации двигателя могут включать в себя, но не в качестве ограничения, потребление крутящего момента привода на ведущие колеса, состояние муфты расцепления привода на ведущие колеса, скорость вращения двигателя, скорость транспортного средства, крутящий момент DISG и состояние заряда аккумуляторной батареи. Способ 3800 переходит на 3804 после того, как определены условия эксплуатации.
На 3804, способ 3800 оценивает, находится или нет двигатель в дрейфовом режиме на дрейфовой скорости вращения холостого хода, и разомкнута ли муфта расцепления привода на ведущие колеса. Режим работы двигателя и рабочее состояние муфты расцепления привода на ведущие колеса могут определяться посредством осуществления опроса одного или более битов или флажковых признаков, хранимых в памяти. Если способ 3800 делает вывод, что двигатель не находится в дрейфовом режиме, ответом является нет, и способ 3800 переходит на выход. Если способ 3800 делает вывод, что двигатель находится в дрейфовом режиме, и муфта расцепления привода на ведущие колеса разомкнута, ответом является да, и способ 3800 переходит на 3806.
На 3806, способ 3800 оценивает, является или нет требуемый крутящий момент привода на ведущие колеса большим, чем пороговый крутящий момент DISG. Пороговый крутящий момент DISG может быть равным или меньшим, чем имеющаяся в распоряжении величина крутящего момента DISG. Если способ 3800 делает вывод, что требуемый крутящий момент привода на ведущие колеса больше, чем пороговый крутящий момент DISG, ответом является да, и способ 3800 переходит на 3808. Иначе, ответом является нет, и способ 3800 переходит на выход.
На 3808, способ 3800 увеличивает скорость вращения двигателя с дрейфовой скорости вращения холостого хода до скорости вращения, синхронного с частотой вращения DISG посредство увеличения количества воздуха двигателя и количества топлива двигателя (например, количеств воздуха и топлива, подаваемых в цилиндры двигателя). Кроме того, установка момента зажигания может подвергаться запаздыванию от установки момента зажигания MBT по мере того, как увеличиваются количество воздуха и количество топлива двигателя. Способ 3800 переходит на 3810 после того, как увеличены количество воздуха и количество топлива двигателя, так что крутящий момент двигателя повышается, и так что двигатель разгоняется до скорости вращения DISG.
На 3810, способ 3800 повышает величину проскальзывания муфты гидротрансформатора (TCC). Проскальзывание муфты расцепления привода на ведущие колеса может увеличиваться посредством уменьшения силы прижатия муфты гидротрансформатора. Посредством увеличения проскальзывания TCC, могут уменьшаться возмущения крутящего момента привода на ведущие колеса. Способ 3800 переходит на 3812 после того, как увеличено проскальзывание TCC.
На 3812, способ 3800 смыкает муфту расцепления привода на ведущие колеса. Муфта расцепления привода на ведущие колеса может смыкаться, когда скорость вращения двигателя достигает скорости вращения DISG, и после того, как скорость вращения двигателя установилось на скорости вращения DISG за заданное время. Способ 3800 переходит на 3814 после того, как муфта расцепления привода на ведущие колеса сомкнута.
На 3814, способ 3800 повышает крутящий момент двигателя посредством увеличения количеств воздуха и топлива двигателя. Дополнительно, крутящий момент DISG может повышаться для усиления крутящего момента двигателя, так чтобы мог обеспечиваться требуемый крутящий момент привода на ведущие колеса. Способ 3800 переходит на выход после того, как крутящий момент двигателя и крутящий момент DISG отрегулированы для обеспечения требуемого крутящего момента привода на ведущие колеса.
Таким образом, способ по фиг. 38 предусматривает переход из дрейфового режима в ответ на нажатие педали акселератора (например, нажатие педали акселератора для более высокого потребления крутящего момента), где DISG является выдающим крутящий момент на колеса, а двигатель находится на холостых оборотах. Например, водитель резко нажимает педаль акселератора, и новое потребление крутящего момента быстро возрастает выше полной несущей способности по крутящему моменту DISG. Двигатель разгоняется в режиме управления скоростью вращения до скорости вращения DISG, TCC размыкаться, чтобы предоставлять возможность умножения крутящего момента и изоляции привода на ведущие колеса, а муфта расцепления привода на ведущие колеса может смыкаться, чтобы очень быстро выводить двигатель на полную скорость вращения. Двигатель переходит на регулирование крутящего момента после того, как двигатель по существу достигает скорости вращения DISG (например, ±100 оборотов в минуту). Впоследствии, двигатель и DISG могут обеспечивать требуемый крутящий момент.
Далее, со ссылкой на фиг. 39, показана примерная последовательность для приведения в действие привода на ведущие колеса, которое включает в себя дрейфовый режим согласно способам по фиг. 37 и 38. Последовательность по фиг. 39 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 39 представляет собой скорость транспортного средства в зависимости от времени. Ось Y представляет скорость транспортного средства, и скорость транспортного средства увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 39 представляет собой требуемый крутящий момент привода на ведущие колеса в зависимости от времени. Требуемый крутящий момент привода на ведущие колеса может быть крутящим моментом на колесах транспортного средства, насосном колесе гидротрансформатора, турбине гидротрансформатора или на муфте расцепления привода на ведущие колеса. Ось Y представляет требуемый крутящий момент привода на ведущие колеса, и требуемый крутящий момент привода на ведущие колеса возрастает в направлении оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 3902 представляет пороговый (например, крутящий момент в пределах предписанного крутящего момента от номинального или максимального крутящего момента DISG) крутящий момент привода на ведущие колеса, который DISG обладает способностью обеспечивать в привод на ведущие колеса. Горизонтальная линия 3904 представляет пороговую (например, крутящий момент в пределах предписанного крутящего момента от крутящего момента проворачивания коленчатого вала двигателя) величину крутящего момента, который DISG может обеспечивать наряду с обладание несущей способностью, чтобы проворачивать коленчатый вал двигателя на скорости вращения проворачивания коленчатого вала (например, 250 оборотов в минуту).
Третий график сверху по фиг. 39 представляет состояние муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет состояние расцепления привода на ведущие колеса, и муфта расцепления привода на ведущие колеса сомкнута, когда кривая состояния муфты расцепления привода на ведущие колеса находится на верхнем уровне возле стрелки оси Y. Муфта расцепления привода на ведущие колеса разомкнута, когда состояние муфты расцепления привода на ведущие колеса находится на нижнем уровне возле оси X. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Четвертый график сверху по фиг. 39 представляет собой состояние двигателя в зависимости от времени. Ось Y представляет состояние двигателя, и двигатель является вращающимся, когда кривая состояния двигателя находится на верхнем уровне возле стрелки оси Y. Двигатель не является вращающимся, когда кривая состояния двигателя находится возле оси X. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 39 представляет состояние заряда (SOC) устройства накопления энергии или аккумуляторной батареи в зависимости от времени. Ось Y представляет SOC аккумуляторной батареи, и SOC аккумуляторной батареи возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 3906 представляет пороговую величину заряда аккумуляторной батареи, которая требуется. Величина заряда выше 3906 может требоваться для снижения вероятности ухудшения характеристик аккумуляторной батареи.
В момент T85 времени, скорость транспортного средства является нулевой, двигатель остановлен, муфта расцепления привода на ведущие колеса разомкнута, состояние заряда аккумуляторной батареи находится на среднем уровне, который больше, чем уровень на 3906. Эти условия могут быть представляющими условия, когда транспортное средство поставлено на стоянку или остановлено на светофоре.
В момент T86 времени, требуемый крутящий момент привода на ведущие колеса возрастает в ответ на увеличение крутящего момента требования водителя, как определяется по педали акселератора (не показана). Двигатель остается в отключенном состоянии, а муфта расцепления привода на ведущие колеса остается сомкнутой. Скорость транспортного средства начинает возрастать по мере того, как встроенный в привод на ведущие колеса стартер/генератор (DISG) (не показан) начинает подавать положительный крутящий момент в привод на ведущие колеса транспортного средства. SOC аккумуляторной батареи начинает убывать, так как заряд аккумуляторной батареи используется для приведения в движение транспортного средства.
Между моментом T86 времени и моментом T87 времени, требуемый крутящий момент привода на ведущие колеса превышает уровень 3904 крутящего момента в ответ на крутящий момент требования водителя. Как результат, двигатель вращается и запускается; однако, муфта расцепления привода на ведущие колеса остается разомкнутой. Двигатель может запускаться посредством стартера, иного чем DISG. Скорость транспортного средства продолжает возрастать, а SOC аккумуляторной батареи продолжает уменьшаться.
В момент T87 времени, требуемый крутящий момент привода на ведущие колеса превышает уровень 3902 крутящего момента в ответ на крутящий момент требования водителя. Вскоре после этого, муфта расцепления привода на ведущие колеса смыкается в ответ на крутящий момент привода на ведущие колеса, превышающий пороговый уровень 3902 крутящего момента. Посредством смыкания муфты расцепления привода на ведущие колеса, крутящий момент привода на ведущие колеса может повышаться посредством увеличения крутящего момента двигателя. Смыкание муфты расцепления привода на ведущие колеса присоединяет двигатель к DISG и остальному приводу на ведущие колеса. Двигатель остается работающим, и крутящий момент двигателя повышается, так чтобы требуемый крутящий момент привода на ведущие колеса мог обеспечиваться DISG и двигателем. SOC аккумуляторной батареи продолжает убывать, в то время как DISG подводит крутящий момент к приводу на ведущие колеса.
В момент T88 времени, требуемый крутящий момент привода на ведущие колеса уменьшается в ответ на водительский входной сигнал с уровнем ниже порогового уровня 3902 крутящего момента, но он остается выше порогового уровня 3904 крутящего момента. Крутящий момент двигателя уменьшается в ответ на уменьшенный требуемый крутящий момент привода на ведущие колеса. Дополнительно, муфта расцепления привода на ведущие колеса размыкается, с тем чтобы отсоединять двигатель от DISG и привода на ведущие колеса. Двигатель остается сжигающим топливо и воздух. Скорость вращения двигателя может снижаться до дрейфовой скорости вращения холостого хода, которая ниже, чем базовая скорость вращения холостого хода, на котором вращается двигатель, когда двигатель присоединен к DISG. Дополнительно, может подвергаться опережению установка момента зажигания двигателя. Снижение скорости вращения двигателя и осуществление опережения установки момента зажигания могут уменьшать расход топлива.
В момент T89 времени, требуемый крутящий момент привода на ведущие колеса повышается на второе время водителем до уровня выше порогового крутящего момента 3902. Муфта расцепления привода на ведущие колеса смыкается в ответ на крутящий момент привода на ведущие колеса, превышающий пороговое значение 3902 крутящего момента. Крутящий момент двигателя затем повышается, и требуемый крутящий момент привода на ведущие колеса выдается посредством двигателя. DISG входит в режим генератора, и состояние заряда аккумуляторной батареи повышается посредством части крутящего момента двигателя. Скорость транспортного средства возрастает, в то время как крутящий момент двигателя выдается в привод на ведущие колеса.
В момент T90 времени, требуемый крутящий момент привода на ведущие колеса уменьшается в ответ на уменьшенный крутящий момент требования водителя. Требуемый крутящий момент привода на ведущие колеса убывает до крутящего момента ниже порогового крутящего момента 3904. Следовательно, муфта расцепления привода на ведущие колеса размыкается, и вращение двигателя останавливается в ответ на низкий требуемый крутящий момент привода на ведущие колеса. Таким образом, расход топлива транспортного средства может снижаться. DISG остается в режиме генератора и увеличивает заряд аккумуляторной батареи, в то время как транспортное средство замедляется.
В момент T91 времени, требуемый крутящий момент привода на ведущие колеса повышается в ответ на крутящий момент требования водителя. Требуемый крутящий момент привода на ведущие колеса повышается до уровня между пороговым значением 3902 крутящего момента и пороговым значением 3904 крутящего момента. Поскольку требуемый крутящий момент привода на ведущие колеса находится возле порогового крутящего момента 3902, двигатель вращается и запускается, так чтобы крутящий момент двигателя мог делаться имеющимся в распоряжении за уменьшенное время, если требуемый крутящий момент привода на ведущие колеса возрастает дальше. Скорость транспортного средства повышается посредством подачи крутящего момента на DISG. Состояние заряда аккумуляторной батареи начинает убывать, в то время как DISG подводит крутящий момент к приводу на ведущие колеса транспортного средства.
В момент T92 времени, требуемый крутящий момент привода на ведущие колеса повышается в ответ на повышение крутящего момента требования водителя. Требуемый крутящий момент привода на ведущие колеса возрастает до уровня, большего чем пороговый крутящий момент 3902. Вскоре после этого, муфта расцепления привода на ведущие колеса смыкается, и крутящий момент двигателя выдается в привод на ведущие колеса. Таким образом, крутящий момент привода на ведущие колеса может быстро повышаться, не вынуждая ожидать, чтобы скорость вращения двигателя достигало уровня, где крутящий момент может обеспечиваться в привод на ведущие колеса. DISG также переводится в режим генератора, и SOC аккумуляторной батареи повышается.
В момент T93 времени, требуемый крутящий момент привода на ведущие колеса уменьшается в ответ на водительский входной сигнал с уровнем ниже порогового уровня 3902 крутящего момента, но он остается выше порогового уровня 3904 крутящего момента. Крутящий момент двигателя уменьшается в ответ на уменьшенный требуемый крутящий момент привода на ведущие колеса. Кроме того, муфта расцепления привода на ведущие колеса размыкается, с тем чтобы отсоединять двигатель от DISG и привода на ведущие колеса. Двигатель остается сжигающим топливо и воздух. Скорость вращения двигателя может уменьшаться до дрейфовой скорости вращения холостого хода. Крутящий момент выдается в привод на ведущие колеса посредством DISG, который переходит в режим крутящего момента, производя положительный крутящий момент для привода на ведущие колеса транспортного средства.
В момент T94 времени, SOC аккумуляторной батареи уменьшается до уровня 3906 по мере того, как DISG продолжает потреблять заряд. Муфта расцепления привода на ведущие колеса смыкается в ответ на SOC аккумуляторной батареи, а DISG переводится в режим генератора. Двигатель подает крутящий момент на привод на ведущие колеса и DISG. Таким образом, муфта расцепления привода на ведущие колеса может размыкаться и смыкаться в ответ на требуемый крутящий момент привода на ведущие колеса и SOC аккумуляторной батареи. В момент T94 времени, требуемый крутящий момент привода на ведущие колеса повышается до уровня выше порогового значения 3902 крутящего момента. Поскольку муфта расцепления привода на ведущие колеса уже сомкнута, она остается в таком состоянии.
В момент T95 времени, требуемый крутящий момент привода на ведущие колеса уменьшается в ответ на уменьшенный крутящий момент требования водителя. Требуемый крутящий момент привода на ведущие колеса убывает до крутящего момента ниже порогового крутящего момента 3904. Соответственно, муфта расцепления привода на ведущие колеса размыкается, и вращение двигателя останавливается в ответ на низкий требуемый крутящий момент привода на ведущие колеса. DISG остается в режиме генератора и увеличивает заряд аккумуляторной батареи, в то время как транспортное средство замедляется.
Далее, со ссылкой на фиг. 40, показана примерная последовательность для приведения в действие привода на ведущие колеса, которое включает в себя дрейфовый режим согласно способам по фиг. 37 и 38. Последовательность по фиг. 40 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 40 представляет состояние муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет состояние муфты расцепления привода на ведущие колеса, и муфта расцепления привода на ведущие колеса сомкнута, когда кривая состояния муфты расцепления привода на ведущие колеса находится на верхнем уровне возле стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Второй график сверху по фиг. 40 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 4002 представляет базовую скорость вращения холостого хода двигателя, когда двигатель присоединен к DISG через муфту расцепления привода на ведущие колеса. Горизонтальная линия 4004 представляет базовую скорость вращения холостого хода дрейфового режима двигателя, когда двигатель является сжигающим топливо и воздух, но не присоединен к DISG.
Третий график сверху по фиг. 40 представляет собой крутящий момент DISG в зависимости от времени. Ось Y представляет крутящий момент DISG, и крутящий момент DISG увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 4006 представляет величину крутящего момента, к выдаче которого в привод на ведущие колеса способен DISG (например, номинальный крутящий момент DISG). Горизонтальная линия 4008 представляет величину крутящего момента, к выдаче которого в привод на ведущие колеса способен DISG наряду со способностью проворачивать коленчатый вал двигателя с нулевой скорости вращения.
Четвертый график сверху по фиг. 40 представляет собой требуемый крутящий момент привода на ведущие колеса в зависимости от времени. Ось Y представляет требуемый крутящий момент привода на ведущие колеса, и требуемый крутящий момент привода на ведущие колеса возрастает в направлении оси Y. В одном из примеров, требуемый крутящий момент привода на ведущие колеса основан на крутящем моменте требования водителя, который определяется по педали акселератора. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Пятый график сверху по фиг. 40 представляет рабочее состояние стартера низкой мощности (например, стартера с более низкой пусковой мощностью, чем DISG). Ось Y представляет рабочее состояние стартер низкой мощности, и стартер низкой мощности является вращающимся, когда кривая состояния стартера низкой мощности находится возле стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
В момент T96 времени, муфта расцепления привода на ведущие колеса сомкнута, и скорость вращения двигателя находится на повышенном уровне. Двигатель является выдающим положительный крутящий момент в привод на ведущие колеса. Крутящий момент DISG находится на низком уровне, указывая, что двигатель является выдающим большую часть крутящего момент в привод на ведущие колеса. Кроме того, стартер низкой несущей способности не является работающим.
Между моментом T96 времени и моментом T97 времени, муфта расцепления привода на ведущие колеса размыкается, и двигатель останавливается в ответ на снижение требуемого крутящего момента привода на ведущие колеса. Требуемый крутящий момент привода на ведущие колеса убывает в ответ на уменьшение крутящего момента требования водителя (не показан). Стартер низкой несущей способности остается отключенным, и крутящий момент DISG остается на нижнем уровне.
В момент T97 времени, муфта расцепления привода на ведущие колеса частично смыкается в ответ на низкое состояние заряда аккумуляторной батареи (не показано). Крутящий момент DISG вскоре повышается в ответ на смыкание муфты расцепления привода на ведущие колеса. DISG выдает дополнительный крутящий момент в привод на ведущие колеса для запуска двигателя. Вскоре после этого, двигатель запускается посредством подачи топлива и искрового зажигания в двигатель. Крутящий момент DISG снижается после того, как двигатель запущен, и крутящий момент DISG меняет направление на отрицательное, когда DISG входит в режим генератора для зарядки аккумуляторной батареи. Двигатель подвергается проворачиванию коленчатого вала без стартера низкой несущей способности посредством муфты расцепления привода на ведущие колеса и DISG в момент времени, когда крутящий DISG ниже порогового значения 4008.
Между моментом T97 времени и моментом T98 времени, двигатель и DISG заряжают аккумуляторную батарею. Двигатель останавливается после того, как аккумуляторная батарея заряжена, и DISG начинает обеспечивать положительный крутящий момент в привод на ведущие колеса. Муфта расцепления привода на ведущие колеса также размыкается, когда двигатель останавливается. Требуемый крутящий момент привода на ведущие колеса повышается вскоре после того, как двигатель остановлен в ответ на повышение крутящего момента требования водителя. Однако, требуемый крутящий момент привода на ведущие колеса не находится в пределах диапазона пороговых значений от уровня 4006 крутящего момента, поэтому, двигатель не запускается.
В момент T98 времени, требуемый крутящий момент привода на ведущие колеса повышается до уровня, который находится в пределах диапазона пороговых значений крутящего момента до уровня 4006 крутящего момента. Стартер низкой несущей способности вводится в зацепление и вращает двигатель в ответ на повышение требуемого крутящего момента привода на ведущие колеса. Двигатель запускается вскоре после этого, когда искра и топливо подаются в двигатель. Муфта расцепления привода на ведущие колеса остается в разомкнутом состоянии, поскольку DISG может обеспечивать требуемый крутящий момент привода на ведущие колеса без содействия от двигателя. Двигатель работает на дрейфовой скорости вращения холостого хода в ожидании повышенного требуемого крутящего момента привода на ведущие колеса.
В момент T99 времени, требуемый крутящий момент привода на ведущие колеса уменьшается до уровня ниже порогового уровня 4008 в ответ на уменьшенный крутящий момент требования водителя (не показан). Двигатель останавливается в ответ на низкий требуемый крутящий момент привода на ведущие колеса, и стартер низкой несущей способности остается отключенным. Муфта расцепления привода на ведущие колеса также остается в разомкнутом состоянии.
Между моментом T99 времени и моментом T100 времени, требуемый крутящий момент привода на ведущие колеса повышается в ответ на увеличенный крутящий момент требования водителя. Требуемый крутящий момент привода на ведущие колеса повышается до уровня, который меньше, чем пороговый крутящий момент, заметно отличающийся уровня 4006 крутящего момента. Поэтому, DISG обеспечивает требуемый крутящий момент привода на ведущие колеса, не запуская двигатель. Муфта расцепления привода на ведущие колеса остается в разомкнутом состоянии.
В момент T100 времени, требуемый крутящий момент привода на ведущие колеса дополнительно повышается в ответ на увеличивающийся крутящий момент требования водителя. Стартер низкой несущей способности вводится в зацепление, и двигатель вращается в ответ на требуемый крутящий момент привода на ведущие колеса, возрастающий до в пределах порогового уровня от уровня 4006 крутящего момента. Двигатель запускается посредством подачи искры и топлива в двигатель в ответ на вращение двигателя. Двигатель разгоняется до числа 4004 оборотов холостого хода дрейфового режима. DISG продолжает подавать весь положительный крутящий момент в привод на ведущие колеса для удовлетворения требуемого крутящего момента привода на ведущие колеса. Стартер низкой несущей способности расцепляется вскоре после того, как запущен двигатель.
В момент T101 времени, требуемый крутящий момент привода на ведущие колеса повышается до уровня, большего чем уровень 4006 крутящего момента, в ответ на увеличивающийся крутящий момент требования водителя. Муфта расцепления привода на ведущие колеса смыкается в ответ на увеличивающийся крутящий момент требования водителя, и скорость вращения двигателя также увеличивается, так что двигатель может обеспечивать дополнительный крутящий момент для дополнения крутящего момента DISG. Стартер низкой несущей способности остается отключенным.
Таким образом, стартер, двигатель и муфта расцепления могут приводиться в действие, чтобы обеспечивать более короткое время реакции на увеличение требуемого крутящего момента привода на ведущие колеса. Кроме того, стартер низкой несущей способности может приводиться в действие во время условий, где DISG не хватает несущей способности, чтобы проворачивать коленчатый вал двигателя, так чтобы мог расширяться рабочий диапазон DISG.
Таким образом, способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: приводят в действие двигатель и выдают крутящий момент двигателя в привод на ведущие колеса, приводящий в движение транспортное средство, в ответ на требуемый крутящий момент, являющийся большим, чем пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора; и приводят в действие двигатель и не выдают крутящий момент двигателя в привод на ведущие колеса в ответ на требуемый крутящий момент, являющийся меньшим, чем пороговый крутящий момент привода на ведущие колеса, и большим, чем пороговый крутящий момент проворачивания коленчатого вала двигателя. Таким образом, привод на ведущие колеса может действовать с улучшенным коэффициентом полезного действия и обеспечивать более короткое время реакции по крутящему моменту.
В некоторых примерах, способ включает в себя те случаи, когда пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора является крутящим моментом в пределах заданного диапазона крутящего момента от номинального крутящего момента встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда пороговый крутящий момент проворачивания коленчатого вала двигателя находится в пределах заданного диапазона крутящего момента от крутящего момента проворачивания коленчатого вала двигателя. Способ включает в себя те случаи, когда крутящий момент проворачивания коленчатого вала двигателя является крутящим моментом для вращения двигателя от нулевого вращения до скорости вращения, меньшего чем 250 оборотов в минуту. Способ дополнительно содержит приведение в действие муфты расцепления привода на ведущие колеса в разомкнутом состоянии наряду с эксплуатацией двигателя, и не выдавая крутящий момент двигателя в привод на ведущие колеса. Способ включает в себя те случаи, когда требуемый крутящий момент основан на крутящем моменте требования водителя. Способ дополнительно содержит выдачу крутящего момента в привод на ведущие колеса посредством встроенного в привод на ведущие колеса стартера/генератора наряду с приведением в действие двигателя, и не выдавая крутящий момент двигателя в привод на ведущие колеса.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: вращают двигатель и выдают крутящий момент двигателя в привод на ведущие колеса, приводящий в движение транспортное средство, в ответ на требуемый крутящий момент, являющийся большим, чем пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора; и вращают двигатель и не выдают крутящий момент двигателя в привод на ведущие колеса в ответ на требуемый крутящий момент, являющийся меньшим, чем пороговый крутящий момент привода на ведущие колеса, и большим, чем пороговый крутящий момент проворачивания коленчатого вала двигателя; и не вращают двигатель в ответ на требуемый крутящий момент, являющийся меньшим, чем пороговый крутящий момент проворачивания коленчатого вала двигателя. Способ дополнительно содержит вращение и приведение в действие двигателя в ответ на состояние заряда аккумуляторной батареи, когда требуемый крутящий момент меньше, чем пороговый крутящий момент проворачивания коленчатого вала двигателя.
В одном из примеров, способ дополнительно содержит вращение двигателя из остановленного состояния в ответ на требуемый крутящий момент, являющийся большим, чем пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора меньше, чем заданный крутящий момент, отличный от номинального крутящего момента встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса находится в сомкнутом состоянии при выдаче крутящего момента двигателя в привод на ведущие колеса, приводящий в движение транспортное средство. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса находится в разомкнутом состоянии при отсутствии выдачи крутящего момента двигателя в привод на ведущие колеса, приводящий в движение транспортное средство. Способ включает в себя те случаи, когда пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора меняется в зависимости от условий эксплуатации транспортного средства.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, чтобы эксплуатировать двигатель на холостом ходу на первой скорости вращения холостого хода, в то время как муфта расцепления привода на ведущие колеса находится в разомкнутом состоянии, и выполняемый команды для эксплуатации двигателя на второй скорости вращения холостого хода, вторая скорость вращения холостого хода больше, чем первая скорость вращения холостого хода, в то время как муфта расцепления привода на ведущие колеса находится в сомкнутом состоянии.
В одном из примеров, система транспортного средства дополнительно содержит дополнительные команды для размыкания и смыкания муфты расцепления привода на ведущие колеса в ответ на требуемый крутящий момент привода на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для осуществления опережения установки момента зажигания и уменьшения количества воздуха двигателя в ответ на двигатель, работающий на первой скорости вращения холостого хода. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для осуществления запаздывания установки момента зажигания и увеличения количества воздуха двигателя относительно установки момента зажигания и количества воздуха двигателя, когда двигатель эксплуатируется на первой скорости вращения холостого хода. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для обеспечения крутящего момента двигателя в трансмиссию в ответ на требуемый крутящий момент, являющийся большим, чем пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора. Система транспортного средства дополнительно содержит дополнительные выполняемые команды для не выдачи крутящего момента двигателя в трансмиссию в ответ на требуемый крутящий момент, являющийся меньшим, чем пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: эксплуатацию двигателя на заданной дрейфовой скорости вращения холостого хода, дрейфовая скорость вращения холостого хода меньше, чем базовая скорость вращения холостого хода двигателя; и размыкание муфты расцепления привода на ведущие колеса, в то время как двигатель является работающим на заданной дрейфовой скорости вращения холостого хода, чтобы отсоединять двигатель от колес транспортного средства. Способ включает в себя те случаи, когда двигатель эксплуатируется на заданной дрейфовой скорости вращения холостого хода, когда требуемый крутящий момент привода на ведущие колеса находится в пределах диапазона пороговых значений от порогового крутящего момента встроенного в привод на ведущие колеса стартера/генератора (DISG), и когда DISG является подводящим крутящий момент к колесам транспортного средства, и где транспортное средство является движущимся наряду с тем, что двигатель находится на заданной дрейфовой скорости вращения холостого хода. Способ включает в себя те случаи, когда пороговый крутящий момент DISG является максимальной несущей способностью по крутящему моменту DISG.
В некоторых примерах, способ дополнительно содержит те случаи, когда установка момента зажигания подвергается опережению в большей степени, чем установка момента зажигания при базовой скорости вращения холостого хода. Способ дополнительно содержит выход из дрейфовой скорости вращения холостого хода в ответ на то, что требуемый крутящий момент превышает пороговое значение. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса в ответ на требуемый крутящий момент, превышающий пороговое значение. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса находится в приводе на ведущие колеса, расположенном между двигателем и встроенным в привод на ведущие колеса стартером/генератором.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: эксплуатируют двигатель на заданной дрейфовой скорости вращения холостого хода в ответ на рабочее состояние, где встроенному в привод на ведущие колеса стартеру/генератору (DISG) не хватает крутящего момента для запуска двигателя из состояния покоя, дрейфовая скорость вращения холостого хода меньше, чем базовая скорость вращения холостого хода двигателя; и размыкание муфты расцепления привода на ведущие колеса, в то время как двигатель является работающим на заданной дрейфовой скорости вращения холостого хода, чтобы отсоединять двигатель от колес транспортного средства. Способ дополнительно содержит выдачу требуемого крутящего момента привода на ведущие колеса на колеса транспортного средства посредством DISG, в то время как двигатель является работающим на заданной дрейфовой скорости вращения холостого хода.
В одном из примеров, способ дополнительно содержит выход из эксплуатации двигателя на заданной дрейфовой скорости вращения холостого хода в ответ на запрос крутящего момента, больший чем пороговое значение. Способ включает в себя те случаи, когда двигатель отсоединяется от DISG. Способ включает в себя те случаи, когда двигатель отсоединяется от трансмиссии. Способ дополнительно содержит разгон двигателя до скорости вращения DISG перед смыканием муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда искра, подаваемая на двигатель, в то время как двигатель является работающим на заданной дрейфовой скорости вращения холостого хода, подвергается большему опережению, чем когда двигатель эксплуатируется на базовой скорости вращения холостого хода.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы (DMF), включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий постоянные команды, выполняемые для входа в дрейфовый режим в ответ на требуемый крутящий момент.
В одном из примеров, система транспортного средства дополнительно содержит дополнительные команды для входа в дрейфовый режим в ответ на требуемый крутящий момент на выходном валу, находящийся в пределах порогового крутящего момента несущей способности по крутящему моменту DISG. Система транспортного средства дополнительно содержит дополнительные команды для входа в дрейфовый режим в ответ на имеющийся в распоряжении крутящий момент DISG, не достаточный для запуска двигателя. Система транспортного средства дополнительно содержит дополнительные команды для выхода из дрейфового режима в ответ на требуемый крутящий момент, являющийся большим, чем пороговое значение. Система транспортного средства дополнительно содержит дополнительные команды для повышения скорости вращения двигателя в ответ на выход из дрейфового режима. Система транспортного средства дополнительно содержит дополнительные команды для смыкания муфты расцепления привода на ведущие колеса, когда скорость вращения двигателя находится по существу на скорости вращения DISG.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу крутящего момента из двигателя в привод на ведущие колеса, присоединенный к колесам; эксплуатацию двигателя на скорости вращения холостого хода и расцепления двигателя с приводом на ведущие колеса в ответ на пониженный крутящий момент требования водителя; и обеспечение постоянного темпа замедления транспортного средства во время пониженного крутящего момента требования водителя. Таким образом, привод на ведущие колеса может сберегать топливо наряду с обеспечением торможения приводом на ведущие колеса и улучшением характеристики крутящего момента.
В некоторых примерах, способ дополнительно содержит размыкание муфты расцепления привода на ведущие колеса в ответ на пониженный крутящий момент требования водителя. Способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор выдает отрицательный крутящий момент, чтобы обеспечивать постоянный темп замедления транспортного средства. Способ включает в себя те случаи, когда скорость вращения холостого хода является первым скоростью вращения холостого хода, и где первая скорость вращения холостого хода ниже, чем вторая скорость вращения холостого хода, двигатель приводится в действие на второй скорости вращения холостого хода, когда двигатель присоединен к приводу на ведущие колеса. Способ включает в себя те случаи, когда двигатель эксплуатируется на скорости вращения холостого хода в ответ на уменьшенный крутящий момент требования водителя, являющийся меньшим, чем крутящий момент встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора больше, чем 75% номинального крутящего момента встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда крутящий момент, выдаваемый из двигателя, является положительным крутящим моментом.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу крутящего момента из двигателя в привод на ведущие колеса, присоединенный к колесам; эксплуатацию двигателя на скорости вращения холостого хода и расцепления двигателя с приводом на ведущие колеса в ответ на пониженный крутящий момент требования водителя; обеспечение постоянного темпа замедления транспортного средства при пониженном крутящем моменте требования водителя; и разгон двигателя до некоторой скорости вращения в ответ на повышенный крутящий момент требования водителя после эксплуатации двигателя на скорости вращения холостого хода. Способ включает в себя те случаи, когда скорость вращения является частотой вращения встроенного в привод на ведущие колеса стартера/генератора.
В некоторых примерах, способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса в ответ на скорость вращения, достигающую скорости вращения встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда постоянное замедление транспортного средства обеспечивается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор эксплуатируется в режиме рекуперации, заряжая аккумуляторную батарею. Способ включает в себя те случаи, когда скорость вращения холостого хода является первым скоростью вращения холостого хода, и где первая скорость вращения холостого хода ниже, чем вторая скорость вращения холостого хода, двигатель приводится в действие на второй скорости вращения холостого хода, когда двигатель присоединен к приводу на ведущие колеса. Способ включает в себя те случаи, когда двигатель эксплуатируется на скорости вращения холостого хода в ответ на уменьшенный крутящий момент требования водителя, являющийся меньшим, чем крутящий момент встроенного в привод на ведущие колеса стартера/генератора.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, для обеспечения постоянного темпа замедления транспортного средства наряду с эксплуатацией на холостом ходу двигателя при скорости вращения холостого хода дрейфового режима.
В одном из примеров, система транспортного средства включает в себя те случаи, когда скорость вращения холостого хода дрейфового режима является скоростью вращения, меньшей, чем базовая скорость вращения холостого хода, базовая скорость вращения холостого хода обеспечивается, когда двигатель присоединен к DISG. Система транспортного средства дополнительно содержит дополнительные команды для размыкания муфты расцепления привода на ведущие колеса в ответ на уменьшение крутящего момента требования водителя. Система транспортного средства дополнительно содержит дополнительные команды для выхода из скорости вращения холостого хода дрейфового режима в ответ на увеличивающийся крутящий момент требования водителя. Система транспортного средства дополнительно содержит дополнительные команды для повышения скорости вращения двигателя от скорости вращения холостого хода дрейфового режима в ответ на увеличивающийся крутящий момент требования водителя. Система транспортного средства включает в себя те случаи, когда постоянный темп замедления транспортного средства обеспечивается посредством DISG.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу крутящего момента в привод на ведущие колеса через встроенный в привод на ведущие колеса стартер/генератор в ответ на требуемый крутящий момент; и запуск двигателя и эксплуатацию двигателя на холостых оборотах бед выдачи крутящего момента двигателя в привод на ведущие колеса в ответ на крутящий момент требования водителя, находящийся в пределах диапазона пороговых значений крутящего момента проворачивания коленчатого вала двигателя. Таким образом, разные уровни требуемого крутящего момента привода на ведущие колеса могут быть основой для входа в или выхода из дрейфового режима. Способ включает в себя те случаи, когда диапазон пороговых значений больше, чем 75% крутящего момента проворачивания коленчатого вала двигателя. Способ включает в себя те случаи, когда крутящий момент DISG выдается в гидротрансформатор. Способ включает в себя те случаи, когда двигатель запускается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда муфта расцепления привода на ведущие колеса находится в разомкнутом состоянии во время эксплуатации двигателя на холостом ходу. Способ также включает в себя те случаи, когда требуемый крутящий момент основан на крутящем моменте требования водителя. Способ включает в себя те случаи, когда крутящий момент проворачивания коленчатого вала двигателя является величиной крутящего момента для разгона двигателя с нулевой скорости вращения до скорости вращения, меньшего чем 250 оборотов в минуту.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу крутящего момента в привод на ведущие колеса через встроенный в привод на ведущие колеса стартер/генератор в ответ на крутящий момент требования водителя; и запуск двигателя и эксплуатацию двигателя на холостых оборотах бед выдачи крутящего момента двигателя в привод на ведущие колеса в ответ на крутящий момент требования водителя, находящийся в пределах диапазона пороговых значений крутящего момента проворачивания коленчатого вала двигателя; и разгон двигателя до скорости вращения встроенного в привод на ведущие колеса стартера/генератора в ответ на крутящий момент требования водителя, увеличивающийся до порогового крутящего момента встроенного в привод на ведущие колеса стартера/генератора. Способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса в ответ на двигатель, достигающий скорости вращения встроенного в привод на ведущие колеса стартера/генератора.
В одном из примеров, способ дополнительно содержит выдачу крутящего момента двигателя в привод на ведущие колеса после смыкания муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда двигатель запускается посредством стартера, иного чем встроенный в привод на ведущие колеса стартер/генератор. Способ включает в себя те случаи, когда двигатель запускается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда двигатель эксплуатируется на холостом ходу при скорости вращения холостого хода дрейфового режима. Способ включает в себя те случаи, когда искра, подаваемая на двигатель, в то время как двигатель является работающим на скорости вращения холостого хода дрейфового режима, подвергается большему опережению, чем когда двигатель эксплуатируется на базовой скорости вращения холостого хода.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, для разгона транспортного средства с нулевой скорости посредством DISG, не запуская двигатель, и команды для запуска двигателя в ответ на требуемый крутящий момент, превышающий пороговый крутящий момент проворачивания коленчатого вала двигателя.
В одном из примеров, система транспортного средства дополнительно содержит дополнительные команды для эксплуатации на холостом ходу двигателя при дрейфовой скорости вращения холостого хода, не выдавая крутящий момент двигателя в привод на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные команды для разгона двигателя с дрейфовой скорости вращения холостого хода в ответ на повышение требуемого крутящего момента. Система транспортного средства дополнительно содержит дополнительные команды для смыкания муфты расцепления привода на ведущие колеса в ответ на скорость вращения двигателя, достигающую скорости вращения DISG. Система транспортного средства дополнительно содержит дополнительные команды для повышения крутящего момента двигателя после смыкания муфты расцепления привода на ведущие колеса. Система транспортного средства включает в себя те случаи, когда крутящий момент проворачивания коленчатого вала двигателя является величиной крутящего момента для разгона двигателя с нулевой скорости вращения до скорости вращения двигателя, меньшего чем 250 оборотов в минуту.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу положительного крутящего момента в привод на ведущие колеса через встроенный в привод на ведущие колеса стартер/генератор; приведение в действие двигателя на скорости вращения холостого хода в режиме управления скоростью вращения; и разгон двигателя в режиме управления скоростью вращения до скорости вращения встроенного в привод на ведущие колеса стартера/генератора в ответ на требуемый крутящий момент. Таким образом, крутящий момент гидротрансформатора может регулироваться во время условия резкого нажатия педали акселератора. Способ включает в себя те случаи, когда требуемый крутящий момент является крутящим моментом требования водителя, и где муфта расцепления привода на ведущие колеса, расположенная в приводе на ведущие колеса между двигателем и встроенным в привод на ведущие колеса стартером/генератором, находится в разомкнутом состоянии.
В одном из примеров, способ дополнительно содержит смыкание муфты расцепления привода на ведущие колеса в ответ на скорость вращения двигателя, достигающую или превышающую скорость вращения встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда скорость вращения холостого хода является скоростью вращения холостого хода дрейфового режима. Способ включает в себя те случаи, когда скорость вращения холостого хода дрейфового режима является более низкой скоростью вращения, чем базовая скорость вращения холостого хода двигателя. Способ дополнительно содержит осуществление опережения установки момента зажигания двигателя, в то время как двигатель работает на скорости вращения холостого хода дрейфового режима относительно установки момента зажигания двигателя у двигателя наряду с эксплуатацией двигателя на базовой скорости вращения холостого хода двигателя. Способ дополнительно содержит уменьшение количества воздуха двигателя, в то время как двигатель работает на скорости вращения холостого хода дрейфового режима, относительно количества воздуха двигателя наряду с эксплуатацией двигателя на базовой скорости вращения холостого хода двигателя.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу положительного крутящего момента в привод на ведущие колеса через встроенный в привод на ведущие колеса стартер/генератор; приведение в действие двигателя на скорости вращения холостого хода в режиме управления скоростью вращения; регулирование проскальзывания муфты гидротрансформатора и разгон двигателя в режиме управления скоростью вращения до скорости вращения встроенного в привод на ведущие колеса стартера/генератора в ответ на требуемый крутящий момент; и смыкание муфты расцепления привода на ведущие колеса в ответ на скорость вращения двигателя, по существу совпадающее с частотой вращения встроенного в привод на ведущие колеса стартера/генератора. Способ включает в себя те случаи, когда регулирование проскальзывания гидротрансформатора включает в себя увеличение проскальзывания гидротрансформатора. Способ дополнительно содержит уменьшение проскальзывания гидротрансформатора в ответ на муфту расцепления привода на ведущие колеса, находящуюся в сомкнутом состоянии.
В некоторых примерах, способ включает в себя те случаи, когда скорость вращения холостого хода является скоростью вращения холостого хода дрейфового режима. Способ включает в себя те случаи, когда скорость вращения холостого хода дрейфового режима является более низкой скоростью вращения, чем базовая скорость вращения холостого хода двигателя. Способ включает в себя те случаи, когда требуемый крутящий момент является увеличивающимся. Способ включает в себя те случаи, когда требуемый крутящий момент возрастает до крутящего момента, большего чем пороговый крутящий момент встроенного в привод на ведущие колеса стартера/генератора.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды в постоянной памяти для обеспечения положительного крутящего момента на трансмиссию исключительно через DISG в ответ на требуемый крутящий момент, являющийся меньшим, чем крутящий момент проворачивания коленчатого вала двигателя, и команды, регулирующие скорость вращения двигателя, чтобы придерживалось скорости вращения DISG, когда крутящий момент DISG больше, чем крутящий момент проворачивания коленчатого вала двигателя, и меньшим, чем пороговый крутящий момент DISG.
В одном из примеров, система транспортного средства дополнительно содержит дополнительные команды для смыкания муфты расцепления привода на ведущие колеса, когда скорость вращения двигателя по существу равно скорости вращения DISG. Система транспортного средства дополнительно содержит дополнительные команды для эксплуатации двигателя в режиме регулирования крутящего момента после смыкания муфты расцепления привода на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные команды для эксплуатации двигателя в режиме управления скоростью вращения наряду с регулированием скорости вращения двигателя, чтобы придерживалось скорости вращения DISG. Система транспортного средства дополнительно содержит дополнительные команды для обеспечения требуемого крутящего момента посредством двигателя и DISG. Система транспортного средства дополнительно содержит гидротрансформатор и муфту гидротрансформатора, и дополнительно содержит дополнительные команды для увеличения проскальзывания муфты гидротрансформатора в ответ на требуемый крутящий момент.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу крутящего момента в привод на ведущие колеса, присоединенный к колесам транспортного средства, посредством двигателя и встроенного в привод на ведущие колеса стартера/генератора; и вход в дрейфовый режим во время выбранных условий, дрейфовый режим включает в себя выдачу крутящего момента DISG в привод на ведущие колеса и эксплуатацию на холостом ходу двигателя, не выдавая крутящий момент двигателя в привод на ведущие колеса. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда температура каталитического нейтрализатора меньше, чем пороговая температура. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда бачок для паров топлива накопил большее, чем пороговое, количество паров топлива. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда уровень разрежения меньше, чем пороговое разрежение. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда температура охлаждающей жидкости двигателя меньше, чем пороговая температура. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда водитель выбрал спортивный режим вождения. Способ включает в себя те случаи, когда двигатель эксплуатируется на холостом ходу при скорости вращения холостого хода, дрейфового режима, которая является более низкой скоростью вращения холостого хода, чем базовая скорость вращения холостого хода, когда двигатель присоединен к DISG.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают способ приведения в действие привода на ведущие колеса, содержащий: выдачу крутящего момента в привод на ведущие колеса, присоединенный к колесам транспортного средства, посредством двигателя и встроенного в привод на ведущие колеса стартера/генератора; вход в дрейфовый режим во время выбранных условий, дрейфовый режим включает в себя выдачу крутящего момента DISG в привод на ведущие колеса и эксплуатацию на холостом ходу двигателя, не выдавая крутящий момент двигателя в привод на ведущие колеса; и осуществление опережения установки момента зажигания и уменьшение количества воздуха двигателя в ответ на вхождение в дрейфовый режим. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда температура каталитического нейтрализатора меньше, чем пороговая температура, и где состояние заряда устройства накопления энергии является равным или большим, чем пороговое состояние заряда.
В некоторых примерах, способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда бачок для паров топлива накопил большее, чем пороговое, количество паров топлива, и где состояние заряда устройства накопления энергии является равным или большим, чем пороговое состояние заряда. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда уровень разрежения меньше, чем пороговое разрежение, и где состояние заряда устройства накопления энергии является равным или большим, чем пороговое состояние заряда. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, когда температура охлаждающей жидкости двигателя меньше, чем пороговая температура, и где состояние заряда устройства накопления энергии является равным или большим, чем пороговое состояние заряда. Способ включает в себя те случаи, когда выбранные условия включают в себя те случаи, водитель выбрал спортивный режим вождения, и где состояние заряда устройства накопления энергии является равным или большим, чем пороговое состояние заряда. Способ включает в себя те случаи, когда двигатель эксплуатируется на холостом ходу при скорости вращения холостого хода, дрейфового режима, которая является более низкой скоростью вращения холостого хода, чем базовая скорость вращения холостого хода, когда двигатель присоединен к DISG.
Способы и системы по фиг. 1-3 и 37-40 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды в постоянной памяти, чтобы входить в дрейфовый режим во время выбранных условий, где двигатель эксплуатируется на скорости вращения холостого хода дрейфового режима, не выдавая крутящий момент двигателя на трансмиссии, и где крутящий момент DISG выдается на трансмиссию, где выбранные условия включают в себя состояние заряда аккумуляторной батареи, являющееся равным или большим, чем пороговый заряд аккумуляторной батареи.
В одном из примеров, система транспортного средства дополнительно содержит дополнительные команды для продувки паров топлива во время дрейфового режима. Система транспортного средства дополнительно содержит дополнительные команды для формирования разрежения во время дрейфового режима. Система транспортного средства дополнительно содержит дополнительные команды для повышения температуры каталитического нейтрализатора во время дрейфового режима. Система транспортного средства дополнительно содержит дополнительные команды для повышения температуры двигателя во время дрейфового режима. Система транспортного средства включает в себя те случаи, когда пороговый заряд аккумуляторной батареи является номинальным зарядом аккумуляторной батареи.
Далее, со ссылкой на фиг. 41 и 42, показана блок-схема последовательности операций способа для адаптации передаточной функции муфты расцепления привода на ведущие колеса. Способ по фиг. 41 и 42 может храниться в качестве выполняемых команд в постоянной памяти контроллера 12 на фиг. 1-3.
На 4102, способ 4100 оценивает, присутствуют или нет условия для адаптации муфты расцепления привода на ведущие колеса. Адаптация муфты расцепления привода на ведущие колеса может реализовываться, начиная с муфты расцепления привода на ведущие колеса в разомкнутом состоянии и после того, как муфта расцепления привода на ведущие колеса достигает заданной рабочей температуры, и после того, как двигатель и DISG достигают выбранных условий эксплуатации, таких как минимальные рабочие температуры двигателя и DISG. В еще одном другом примере, адаптация муфты расцепления привода на ведущие колеса может быть предусмотрена во время условий, где скорость вращения насосного колеса гидротрансформатора является большей, чем скорость вращения турбины гидротрансформатора. Если способ 4100 делает вывод, что присутствуют условия для адаптации муфты расцепления привода на ведущие колеса, ответом является да, и способ 4100 переходит на 4104. Иначе, ответом является нет, и способ 4100 переходит на выход.
На 4104, способ 4100 размыкает муфту гидротрансформатора (TCC), и DISG вращается, если нет датчика крутящего момента, или если двигатель не является вращающимся и осуществляющим сгорание. Если датчик крутящего момента есть, измерение крутящего момента не основано на скорости вращения насосного колеса. Если двигатель является вращающимся и осуществляющим сгорание, способ по фиг. 42 не требует, чтобы DISG был вращающимся. Когда требуется вращение DISG, DISG вращается под своей собственной мощностью посредством тока, подаваемого устройством накопления энергии. В одном из примеров, DISG вращается на менее чем 1000 оборотах в минуту, так что очень небольшой крутящий момент передается через гидротрансформатор на трансмиссию. Таким образом, DISG может вращаться с частотой вращения, которая выдает меньшую, чем пороговая, величину крутящего момента через гидротрансформатор в трансмиссию. Способ 4100 переходит на 4106 после того, как TCC разомкнута.
На 4106, способ 4100 оценивает, является или нет двигатель вращающимся и сжигающим топливно-воздушную смесь. В одном из примеров, двигатель может оцениваться вращающимся и сжигающим топливно-воздушную смесь, когда скорость вращения двигателя больше, чем пороговая скорость вращения. Если способ 4100 делает вывод, что двигатель является вращающимся и сжигающим топливно-воздушную смесь, ответом является да, и способ 4100 переходит на 4150. Иначе, ответом является нет, и способ 4100 переходит на 4108.
На 4150, способ 4100 приводит в действие двигатель в режиме управления скоростью вращения. Кроме того, скорость транспортного средства может быть нулевой. Двигатель может быть сжигающим топливно-воздушную смесь, когда начинается адаптация муфты расцепления привода на ведущие колеса, или двигатель может запускаться посредством стартера или DISG. Муфта трансформатора находится в разомкнутом состоянии, и скорость вращения двигателя регулируется посредством изменения крутящего момента двигателя посредством дросселя, установки момента зажигания, установки фаз кулачкового распределения, подъема клапана, впрыска топлива или других исполнительных механизмов двигателя. Способ 4100 переходит на 4152 после того, как двигатель установлен в режим управления скоростью вращения.
На 4152, способ 4100 регулирует скорость вращения двигателя, чтобы было выше или ниже скорости вращения DISG. Например, если скорость вращения DISG имеет значение 400 оборотов в минуту, скорость вращения двигателя может регулироваться на 800 RPM. В качестве альтернативы, например, скорость вращения двигателя может регулироваться на 700 оборотов в минуту, если скорость вращения DISG имеет значение 800 оборотов в минуту. Способ 4100 переходит на 4154 после того, как отрегулировано скорость вращения двигателя.
На 4154, способ 4100 оценивает крутящий момент двигателя и сохраняет оцененный крутящий момент двигателя в памяти. Крутящий момент двигателя может оцениваться, как описано в патенте США под № 7,066,121. В качестве альтернативы, крутящий момент двигателя может оцениваться посредством других известных способов. Например, крутящий момент двигателя может определяться опытным путем на выбранных скоростях вращения двигателя и нагрузках двигателя. Определенные опытным путем данные хранятся в памяти контроллера и извлекаются посредством индексирования таблиц или функций на основании существующих скорости вращения и нагрузки двигателя. Способ 4100 переходит на 4156 после того, как оценен крутящий момент двигателя.
На 4156, способ 4100 инкрементально повышает давление прижатия муфты расцепления привода на ведущие колеса. В одном из примеров, давление прижатия муфты расцепления привода на ведущие колеса может повышаться посредством увеличения рабочего цикла сигнала управления муфтой расцепления привода на ведущие колеса. Более высокий рабочий цикл повышает давление масла, подаваемое на муфту расцепления привода на ведущие колеса. Инкрементальное повышение давления прижатия расцепления привода на ведущие колеса может определяться и сохраняться в памяти в качестве передаточной функции муфты расцепления привода на ведущие колеса. Передаточная функция муфты расцепления привода на ведущие колеса устанавливает соотношение давления прижатия муфты расцепления и крутящего момента на входном валу муфты расцепления привода на ведущие колеса и выводит крутящий момент на выходном валу муфты расцепления привода на ведущие колеса. Передаточная функция муфты расцепления привода на ведущие колеса также может использоваться для выбора давления прижатия муфты расцепления привода на ведущие колеса посредством индексирования передаточной функции с помощью требуемого крутящего момента на выходном валу муфты и крутящего момента на входном валу муфты.
Давление или сила прижатия муфты расцепления привода на ведущие колеса, скорость вращения двигателя и скорость вращения DISG сохраняются в памяти каждый раз, когда повышается давление прижатия муфты расцепления привода на ведущие колеса. Каждый раз, когда муфта расцепления привода на ведущие колеса переключается на новый уровень (могут быть многочисленные уровни, используемые последовательно для изучения передаточной функции муфты согласно способу 4130 и фиг. 43), системе может быть необходимо ожидать, чтобы скорость вращения двигателя стабилизировалось на требуемой скорости вращения двигателя, а затем, сохраняется новая оценка крутящего момента двигателя. Как только контроллер скорости вращения двигателя подавил любые возмущения от изменения крутящего момента муфты расцепления, следует сохранять как оцененный крутящий момент двигателя, так и оцененный крутящий момент муфты расцепления для использования на 4160. Контроллер двигателя может использовать оцененное давление или несущую способность муфты расцепления и знак проскальзывания на муфте расцепления, чтобы проактивно увеличивать или уменьшать крутящий момент двигателя при необходимости, или управление двигателем может использовать только управление с обратной связью для компенсации скорости вращения двигателя касательно изменений давления муфты расцепления. Способ 4100 переходит на 4158 после того, как повышено давление прижатия муфты расцепления привода на ведущие колеса.
На 4158, способ 4100 оценивает, полностью или нет был применен профиль прижатия муфты расцепления привода на ведущие колеса. В одном из примеров, профиль прижатия муфты расцепления привода на ведущие колеса предусматривает достаточное давление для передачи минимального крутящего момента (например, 2 Н∙м), чтобы только одна накладка муфты едва начинала прикасаться к другой накладке муфты. В других примерах, профиль прижатия муфты расцепления привода на ведущие колеса может переходить от полностью разомкнутого до полностью сомкнутого. Если способ 4100 делает вывод, что не все давления прижатия профиля муфты расцепления привода на ведущие колеса были применены, ответом является нет, и способ 4100 возвращается на 4154. Иначе, ответом является да, и способ 4100 переходит на 4160.
На 4160, способ 4100 сравнивает оценку(и) крутящего момента муфты расцепления привода на ведущие колеса из передаточной функции муфты расцепления привода на ведущие колеса с оценкой(ами) крутящего момента двигателя, сохраненными, когда скорость вращения двигателя стабилизировалось на требуемой скорости вращения командных давлений муфты расцепления, когда передаточная функция муфты расцепления привода на ведущие колеса применяется посредством приращения давления прижатия муфты расцепления привода на ведущие колеса. Например, если передаточная функция муфты расцепления привода на ведущие колеса выводит рабочий цикл муфты расцепления привода на ведущие колеса в 35%, (соответствующий требуемому давлению прижатия муфты расцепления привода на ведущие колеса) для достижения требуемого крутящего момента на выходном валу муфты расцепления в 50 Н∙м, когда крутящий момент на входном валу муфты расцепления привода на ведущие колеса имеет значение 85 Н∙м, но крутящий момент на выходном валу муфты расцепления привода на ведущие колеса имеет значение 45 Н∙м в качестве оцененного оценкой крутящего момента двигателя, может делаться вывод, что передаточная функция муфты расцепления привода на ведущие колеса имеет ошибку 5 Н∙м, когда рабочий цикл 35% применяется к муфте расцепления привода на ведущие колеса, когда крутящий момент на выходном валу муфты расцепления привода на ведущие колеса имеет значение 85 Н∙м. Разность между требуемым крутящим моментом муфты расцепления привода на ведущие колеса и крутящим моментом двигателя может определяться для каждого набора условий эксплуатации, где передаточная функция муфты расцепления привода на ведущие колеса применялась на 4156. Способ 4100 переходит на 4162 после того, как крутящий момент муфты расцепления привода на ведущие колеса, который определен по передаточной функции муфты расцепления привода на ведущие колеса, сравнивается с крутящим моментом, оцененным по двигателю, когда приращивается давление прижатия муфты расцепления привода на ведущие колеса.
На 4162, способ 4100 обновляет передаточную функцию муфты расцепления привода на ведущие колеса в выборочных записях в ответ на ошибку между крутящим моментом муфты расцепления привода на ведущие колеса, оцененным по двигателю, и крутящим моментом муфты расцепления привода на ведущие колеса, ожидаемым на основании передаточной функции муфты расцепления привода на ведущие колеса. Например, если крутящий момент муфты расцепления привода на ведущие колеса, оцененный по двигателю, отличается от крутящего момента муфты расцепления привода на ведущие колеса, определенного из передаточной функции муфты расцепления привода на ведущие колеса, крутящий момент муфты расцепления привода на ведущие колеса, оцененный по двигателю, замещает соответствующее значение крутящего момента муфты расцепления привода на ведущие колеса в передаточной функции муфты расцепления привода на ведущие колеса. Таким образом, оценка крутящего момента двигателя может быть основой для регулирования передаточной функции муфты расцепления привода на ведущие колеса. Способ 4100 переходит на 4164 после того, как передаточная функция муфты расцепления обновлена на выбранных значениях, где крутящий момент муфты расцепления привода на ведущие колеса, оцененный по двигателю, расходится с крутящим моментом муфты расцепления привода на ведущие колеса, описанным в передаточной функции муфты расцепления привода на ведущие колеса.
Если разность между основанным на крутящем моменте двигателя оцененным крутящем моменте муфты расцепления и предыдущим крутящим моментом муфты расцепления находится выше порогового значения, последовательность адаптации может вновь возвращаться к проверке системы при следующей благоприятной возможности, и последовательность адаптации может выполняться до тех пор, пока система на обновлена успешно. Должно быть отмечено, что все способы адаптации, описанные в материалах настоящего описания, могут выполняться чаще, раньше или незамедлительно в ответ на величину ошибки передаточной функции муфты расцепления привода на ведущие колеса.
На 4164, способ 4100 применяет исправленную передаточную функцию муфты расцепления привода на ведущие колеса к планируемому давлению муфты расцепления привода на ведущие колеса. Например, когда запрошено регулирование в отношении давления муфты расцепления привода на ведущие колеса, давление муфты расцепления привода на ведущие колеса выводится на основании исправленной передаточной функции муфты расцепления привода на ведущие колеса на 4162. Способ 4100 осуществляет выход после того, как выведены исправленные давления муфты расцепления привода на ведущие колеса.
На 4108, способ 4100 оценивает, запрошен или нет перезапуск двигателя. Если вращение двигателя остановлено на 4108, он может перезапускаться, если требуется. Если перезапуск двигателя запрошен во время адаптации муфты расцепления привода на ведущие колеса, может быть возможным, что ошибки могут присутствовать в адаптированной передаточной функции муфты расцепления привода на ведущие колеса. Поэтому, адаптация муфты расцепления привода на ведущие колеса не выполняется во время перезапусков двигателя. Если способ 4100 определяет, что требуется перезапуск двигателя, ответом является да, и способ 4100 переходит на выход. Иначе, ответом является нет, и способ 4100 переходит на 4110.
На 4110, способ 4100 оценивает, присутствует или нет датчик крутящего момента привода на ведущие колеса для выявления крутящего момента привода на ведущие колеса. Если способ 4100 делает вывод, что датчик крутящего момента привода на ведущие колеса присутствует, ответом является да, и способ 4100 переходит на 4130. Иначе, ответом является нет, и способ 4100 переходит на 4112.
Отметим, что, в некоторых примерах, адаптация муфты расцепления привода на ведущие колеса на основании гидротрансформатора (например, 4112-4122) или датчика крутящего момента (например, 4130-4138) может проводиться одновременно с основанной на крутящем моменте двигателя оценкой крутящего момента муфты расцепления привода на ведущие колеса (например, 4150-4164), если скорость вращения двигателя и скорость вращения DISG поддерживаются обособленными (например, муфта расцепления привода на ведущие колеса проскальзывает), и контроллер двигателя эксплуатируется при регулировании скорости вращения двигателя с замкнутым контуром.
На 4130, способ 4100 повышает давление муфты расцепления привода на ведущие колеса из состояния, где муфта расцепления привода на ведущие колеса находится в полностью разомкнутом состоянии, последовательно повышая давление прижатия муфты расцепления привода на ведущие колеса. Давление муфты расцепления привода на ведущие колеса может повышаться с определенной скоростью или согласно заданной группе выбранных приращений давления прижатия муфты расцепления привода на ведущие колеса. Способ 4100 переходит на 4132 после повышения давления прижатия муфты расцепления привода на ведущие колеса. DISG может приводиться в действие в режиме с обратной связью по скорости вращения с постоянной командной частотой вращения (например, скоростью вращения холостого хода ~ 700 оборотов в минуту). В качестве альтернативы, скорость вращения DISG может выбираться в качестве более низкой скорости вращения для снижения энергопотребления.
На 4132, способ 4100 регулирует крутящий момент DISG на основании существующей передаточной функции муфты расцепления привода на ведущие колеса, которая подвергнута адаптации после того, как завершена процедура прижатия муфты расцепления привода на ведущие колеса. В частности, крутящий момент DISG повышается на основании величины крутящего момента, оцененного передаваемым с DISG на двигатель через муфту расцепления привода на ведущие колеса согласно передаточной функции муфты расцепления привода на ведущие колеса. Способ 4100 переходит на 4134 после того, как отрегулирован крутящий момент DISG.
На 4134, способ 4100 сравнивает величину крутящего момента, передаваемого муфтой расцепления привода на ведущие колеса, с командным крутящим моментом передачи муфты расцепления привода на ведущие колеса (например, величиной запрошенного крутящего момента муфты расцепления привода на ведущие колеса посредством передаточной функции муфты расцепления привода на ведущие колеса). В одном из примеров, крутящий момент муфты расцепления привода на ведущие колеса может определяться посредством следующих уравнений в зависимости от местоположения датчика крутящего момента привода на ведущие колеса:
Если датчик крутящего момента находится на насосном колесе гидротрансформатора:
Если датчик крутящего момента находится на турбине/входном валу гидротрансформатора:
Где
Где - оцененный крутящий момент муфты расцепления привода на ведущие колеса, Ielec_machine - инерция DISG, Nimpeller - скорость вращения насосного колеса гидротрансформатора, Tsensor - крутящий момент, измеренный с помощью датчика крутящего момента, Telec_machine- выходной крутящий момент DISG, Tturbine - крутящий момент турбины гидротрансформатора, cpc - коэффициент несущей способности гидротрансформатора, Nturbine - скорость вращения турбины гидротрансформатора, а Tconv_clutch- крутящий момент муфты гидротрансформатора.
Во время условий, где скорость вращения турбины гидротрансформатора меньше, чем скорость вращения насосного колеса гидротрансформатора, муфта гидротрансформатора разомкнута, муфта расцепления привода на ведущие колеса разомкнута (например, желательным случаем является транспортное средство в состоянии покоя с вращением насосного колеса ~700 оборотов в минуту), адаптивно корректировать коэффициент несущей способности (cpc) гидротрансформатора на основании крутящего момента электродвигателя и ускорения насосного колеса с использованием приведенных выше уравнений. Во время условий, где является вращающимся насосное колесо гидротрансформатора, муфта расцепления привода на ведущие колеса разомкнута, и не дана команда перезапуска двигателя, дается команда последовательно более высокого крутящего момента муфты расцепления привода на ведущие колеса. На основании текущей оценки давления хода или пятна контакта муфты расцепления привода на ведущие колеса (например, муфте расцепления привода на ведущие колеса дается команда в точку, где сначала контактируют обкладки муфты расцепления привода на ведущие колеса на входной и выходной сторонах муфты расцепления привода на ведущие колеса, когда муфта расцепления привода на ведущие колеса является переходящей из разомкнутого состояния в частично сомкнутое состояние) у муфты расцепления привода на ведущие колеса, крутящий момент муфты расцепления привода на ведущие колеса компенсируется посредством крутящего момента DISG для уменьшения влияния на ездовые качества транспортного средства. В одном из примеров, крутящий момент DISG увеличивается пропорционально величине оцененного крутящего момента муфты расцепления привода на ведущие колеса на основании существующей передаточной функции муфты.
Оценка крутящего момента муфты расцепления привода на ведущие колеса может сравниваться с измерением с датчика крутящего момента при надлежащей компенсации крутящих моментов и инерций между муфтой расцепления привода на ведущие колеса и датчиком крутящего момента. Давление хода/пятно контакта муфты расцепления привода на ведущие колеса могут адаптивно регулироваться. В одном из примеров, передаточная функция муфты расцепления привода на ведущие колеса регулируется посредством замещения значения в передаточной функции муфты расцепления привода на ведущие колеса оцененным крутящим моментом муфты расцепления привода на ведущие колеса. В качестве альтернативы, передаточная функция муфты расцепления привода на ведущие колеса может регулироваться на основании ошибки между передаточной функцией муфты расцепления привода на ведущие колеса и оцененным крутящим моментом муфты расцепления привода на ведущие колеса.
Если командный крутящий момент муфты расцепления привода на ведущие колеса меньше, чем или большим, чем величина крутящего момента, передаваемого муфтой расцепления привода на ведущие колеса, на заданную величину, значение крутящего момента муфты расцепления привода на ведущие колеса в передаточной функции муфты расцепления привода на ведущие колеса регулируется на измеренный крутящий момент муфты расцепления привода на ведущие колеса.
Таким образом, передаточная функция муфты расцепления привода на ведущие колеса может регулироваться для обеспечения улучшенной оценки величины крутящего момента, передаваемого муфтой расцепления привода на ведущие колеса. Способ 4100 переходит на 4136 после того, как передаточная функция муфты расцепления привода на ведущие колеса была оценена и/или адаптирована в существующих условиях эксплуатации.
На 4136, способ 4100 оценивает, все или нет из требуемых участков передаточной функции муфты расцепления привода на ведущие колеса были оценены и/или отрегулированы на всех требуемых давлениях прижатия муфты расцепления привода на ведущие колеса. Если так, ответом является да, и способ 4100 переходит на 4138. Иначе, ответом является нет, и способ 4100 возвращается на 4130, где давление прижатия муфты расцепления привода на ведущие колеса повышается, и передаточная функция муфты расцепления привода на ведущие колеса оценивается в новом рабочем состоянии.
На 4138, способ 4100 применяет исправленную передаточную функцию муфты расцепления привода на ведущие колеса к планируемому давлению муфты расцепления привода на ведущие колеса. Например, когда запрошено регулирование в отношении давления муфты расцепления привода на ведущие колеса, давление муфты расцепления привода на ведущие колеса выводится на основании исправленной передаточной функции муфты расцепления привода на ведущие колеса на 4134. Способ 4100 осуществляет выход после того, как выведены исправленные давления муфты расцепления привода на ведущие колеса.
На 4112, способ 4100 повышает давление прижатия муфты расцепления из состояния, где муфта расцепления привода на ведущие колеса полностью разомкнута, как описано на 4130. Скорость транспортного средства может быть нулевой в это время, и команда муфты расцепления привода на ведущие колеса может увеличиваться с определенными приращениями, чтобы повышать давление или силу прижатия муфты расцепления привода на ведущие колеса. Способ 4100 переходит на 4114 после того, как отрегулировано давление прижатия муфты расцепления привода на ведущие колеса.
На 4114, способ 4100 регулирует крутящий момент DISG, как описано на 4132. Способ 4100 переходит на 4116 после того, как отрегулирован крутящий момент DISG.
На 4116, способ 4100 оценивает крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса, на основании скоростей вращения и ускорений компонентов привода на ведущие колеса. В одном из примеров, крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса, может оцениваться посредством следующих уравнений:
Где:
Решение относительно крутящего момента муфты расцепления привода на ведущие колеса:
Где Iimpeller инерция насосного колеса гидротрансформатора, Nimpeller - скорость вращения насосного колеса гидротрансформатора, Tclutch - крутящий момент муфты расцепления привода на ведущие колеса, Telec_machine - крутящий момент DISG, Tconv - крутящий момент насосного колеса гидротрансформатора, cpc - коэффициент несущей способности гидротрансформатора, Nturbine - скорость вращения турбины гидротрансформатора Tconv_clutch- крутящий момент муфты гидротрансформатора.
Во время условий, где скорость вращения турбины гидротрансформатора меньше, чем скорость вращения насосного колеса гидротрансформатора, обходная муфта гидротрансформатора разомкнута, муфта расцепления привода на ведущие колеса разомкнута (например, желательным случаем является транспортное средство в состоянии покоя с насосным колесом, вращающимся на ~ 700 оборотов в минуту), коэффициент несущей способности (cpc) гидротрансформатора, который основан на крутящем моменте электродвигателя и ускорении насосного колеса, адаптивно корректируется с помощью уравнений, приведенных выше. Во время условий, где является вращающимся насосное колесо, муфта расцепления привода на ведущие колеса разомкнута, и не дана команда перезапуска двигателя, дается команда последовательно более высоких крутящих моментов муфты расцепления привода на ведущие колеса. Крутящий момент муфты расцепления привода на ведущие колеса компенсируется посредством крутящего момента DISG для снижения влияния на ездовые качества. Крутящий момент муфты расцепления привода на ведущие колеса основан на текущей оценке давления хода муфты расцепления привода на ведущие колеса или пятна контакта муфты расцепления привода на ведущие колеса.
Например, крутящий момент DISG увеличивается по мере того, как увеличивается крутящий момент муфты расцепления привода на ведущие колеса. В одном из примеров, крутящий момент DISG увеличивается пропорционально крутящему моменту, передаваемому через муфту расцепления привода на ведущие колеса. Оценка крутящего момента муфты расцепления привода на ведущие колеса сравнивается с крутящим моментом муфты расцепления привода на ведущие колеса, рассчитанным с использованием уравнений, приведенных выше, на основании других крутящих моментов, скоростей вращения и ускорений, на 4118. Затем, давление хода/пятно контакта муфты расцепления привода на ведущие колеса у муфты расцепления привода на ведущие колеса адаптивно обновляется на 4118. Способ 4100 переходит на 4118 после того, как оценена величина крутящего момента, передаваемого муфтой расцепления привода на ведущие колеса.
На 4118, способ 4100 сравнивает оцененный крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса, с крутящим моментом муфты расцепления привода на ведущие колеса из существующей передаточной функции муфты расцепления привода на ведущие колеса, как описано на 4134. Сравнение может выполняться посредством вычитания оцененного крутящего момента муфты расцепления привода на ведущие колеса из требуемого крутящего момента муфты расцепления привода на ведущие колеса, чтобы обеспечивать ошибку, которая является основой для обновления передаточной функции муфты расцепления привода на ведущие колеса. Когда ошибка является большей, чем заданная величина, оцененный крутящий момент муфты расцепления привода на ведущие колеса замещает значение муфты расцепления привода на ведущие колеса в передаточной функции муфты расцепления привода на ведущие колеса или является основой для регулирования передаточной функции муфты расцепления привода на ведущие колеса. Способ 4100 переходит на 4120 после того, как оцененная величина крутящего момента, передаваемого муфтой расцепления привода на ведущие колеса, сравнивается с крутящим моментом муфты расцепления привода на ведущие колеса из передаточной функции муфты расцепления привода на ведущие колеса.
На 4120, способ 4100 оценивает, все или нет из требуемых участков передаточной функции муфты расцепления привода на ведущие колеса были оценены и/или отрегулированы на всех требуемых давлениях прижатия муфты расцепления привода на ведущие колеса. Если так, ответом является да, и способ 4100 переходит на 4122. Иначе, ответом является нет, и способ 4100 возвращается на 4112, где давление прижатия муфты расцепления привода на ведущие колеса повышается, и передаточная функция муфты расцепления привода на ведущие колеса оценивается в новом рабочем состоянии.
На 4122, способ 4100 применяет исправленную передаточную функцию муфты расцепления привода на ведущие колеса к планируемому давлению муфты расцепления привода на ведущие колеса. Например, когда запрошено регулирование в отношении давления муфты расцепления привода на ведущие колеса, давление муфты расцепления привода на ведущие колеса выводится на основании исправленной передаточной функции муфты расцепления привода на ведущие колеса на 4118. Способ 4100 осуществляет выход после того, как выведены исправленные давления муфты расцепления привода на ведущие колеса.
В некоторых примерах, муфта расцепления привода на ведущие колеса может использоваться в комбинации с автоматической трансмиссией с двойным сцеплением (DCT) (например, фиг. 3). В этих применениях, DISG может использоваться в качестве устройства считывания крутящего момента, чтобы измерять крутящий момент пусковой муфты DCT в качестве функции командного крутящего момента пусковой муфты DCT на низких уровнях крутящего момента, которыми пусковая муфта оперирует во время перезапуска и пуска двигателя. Коэффициент передачи и/или смещение затем могут обновляться в таблицах крутящего момента пусковой муфты DCT, чтобы приводить в соответствие фактический крутящий момент входного вала выходному валу. Один из примеров использования DISG для считывания крутящего момента пусковой муфты DCT включает в себя: измерение крутящего момента пусковой муфты DCT, когда транспортное средство остановлено, и применены тормоза, например, когда транспортное средство находится в состоянии покоя, и водитель применяет тормоз, или тормозной системе дается команда задерживать отпускание тормозов. Такая операция может использоваться для предотвращения передачи изменения крутящего момента пусковой муфты DCT на колеса или влияния на разгон транспортного средства.
В некоторых примерах, муфта расцепления привода на ведущие колеса может быть разомкнутой. Разомкнутая муфта расцепления привода на ведущие колеса может устранять взаимодействия крутящего момент или податливости двигателя и/или маховика двойной массы (DMF), которые могут оказывать влияние на способность DISG точно считывать крутящий момент пусковой муфты DCT. DISG может приводиться в действие в режиме с обратной связью по скорости вращения с постоянной командной частотой вращения, например, скоростью вращения холостого хода ~ 700 оборотов в минуту. Скорость вращения DISG может выбираться в качестве нижней скорости вращения для снижения расхода топлива. Скорость вращения DISG может устанавливаться для поддержания гидравлического давления в автоматической трансмиссии (AT), используя DISG для вращения гидравлического насоса трансмиссии. Приведение в действие DISG для поддержания давления трансмиссионного масла применяется к DCT с гидравлическими муфтами в противоположность DCT с сухим сцеплением.
В некоторых примерах, пусковая муфта DCT полностью разомкнута (например, с нулевой несущей способностью по крутящему моменту), когда изучается оценка крутящего момента DISG. Оценка крутящего момента DISG является основой для регистрации крутящего момента разомкнутой пусковой муфты DCT на командной скорости вращения DISG. Оценка крутящего момента DISG является функцией трехфазных токов DISG или командного крутящего момента из внутреннего контура регулирования с обратной связью скорости вращения DISG. Пусковой муфте DCT дается команда работать в требуемом диапазоне крутящего момента после того, как крутящий момент разомкнутой муфты DCT был определен по оценке крутящего момента DISG. Крутящие моменты пусковой муфты DCT для каждого командного крутящего момента в требуемом диапазоне крутящего момента определяются по крутящему моменту DISG, определенному на каждом командном крутящем моменте. Крутящий момент ошибки пусковой муфты DCT определяется в качестве разности между измерением крутящего момента пусковой муфты DCT и считанным крутящим моментом из оценки крутящего момента трехфазного тока DISG или командного крутящего момента. DISG может приводиться в действие в режиме с обратной связью по скорости вращения, который включает в себя внутренний контур крутящего момента, при определении крутящего момента пусковой муфты DCT. Таблица или передаточная функция крутящего момента DCT обновляется согласно наблюдаемому крутящему моменту DISG.
Кроме того, изменчивость приведения в действие и оценки крутящего момента, передаваемого через TCC, может быть фактором шума, который может вносить вклад в плохие ездовые качества системы транспортного средства. Если крутящий момент TCC не приводится в действие корректно вследствие ошибок в командном в противоположность фактическому крутящему моменту TCC во время процесса перезапуска двигателя, крутящий момент, передаваемый на колеса, может быть меньшим, чем требуемый, и пусковые характеристики и ездовые качества могут ухудшаться.
DISG может эксплуатироваться в качестве устройства считывания крутящего момента для измерения крутящего момента, передаваемого через TCC, в качестве функции командного крутящего момента TCC во время запуска двигателя. Низкие уровни крутящего момента, передаваемые через TCC во время запуска и пуска в ход двигателя, могут быть основой для обновления значений коэффициента передачи и/или смещения в таблицах крутящего момента TCC, так чтобы значения таблиц соответствовали фактическому крутящему моменту со входного вала на выходной вал.
Один из примеров приведения в действие DISG для считывания передаваемого крутящего момента TCC включает в себя: измерение крутящего момента TCC посредством DISG, когда транспортное средство остановлено, и когда нажаты тормоза (например, когда транспортное средство находится в состоянии покоя, и водитель является применяющим тормоза). Еще один пример включает в себя оценку передаваемого крутящего момента TCC через DISG, когда муфты автоматической трансмиссии связывают выход трансмиссии в целях удержания на возвышенности. Связывание трансмиссии снижает вероятность передачи передаваемого крутящего момента TCC на колеса транспортного средства.
Крутящий момент, передаваемый через TCC, может точнее определяться, когда муфта расцепления привода на ведущие колеса разомкнута, поскольку она устраняет взаимодействия двигателя, маховика двойной массы и податливости, которые могут оказывать влияние на оценки крутящего момента DISG. DISG может эксплуатироваться в режиме с обратной связью по скорости вращения на низкой постоянной командной скорости вращения (например, скорости вращения холостого хода ~ 700 оборотов в минуту) для снижения энергопотребления, когда DISG является основой для оценок передачи крутящего момента TCC. Скорость вращения DISG также может регулироваться, чтобы поддерживать гидравлическое давление в гидротрансформаторе, вращая трансмиссию посредством DISG.
Передаточная функция TCC, которая описывает величину крутящего момента, передаваемого посредством TCC, при выбранных давлениях или силах прижатия, может адаптироваться на основании оценок крутящего момента DISG. В одном из примеров, TCC дается команда полностью размыкаться (например, с нулевой несущей способностью по крутящему моменту), и отдача гидротрансформатора оценивается на основании тока DISG. Ток DISG преобразуется в крутящий момент, который вычитается из крутящих моментов, определенных при других командах TCC, где TCC не дана команда полностью размыкаться. Таким образом, смещение крутящего момента определяется и сохраняется в память, когда TCC дана команда полностью размыкаться. TCC затем дается команда в приращениях на требуемом диапазоне крутящего момента, в то время как крутящий момент DISG оценивается по току DISG на каждом командном крутящем моменте. Величина ошибки крутящего момента передачи TCC определяется по разности между командой крутящего момента с разомкнутым контуром TCC (например, передаточной функцией TCC) и крутящим моментом TCC, который определен по трехфазному току DISG. Передаточная функция TCC может обновляться на основании ошибки крутящего момента передачи TCC. В одном из примеров, доля каждой ошибки крутящего момента передачи TCC прибавляется к текущему значению в передаточной функции TCC, которое соответствует ошибке крутящего момента передачи TCC.
Таким образом, передаточная функция муфты расцепления привода на ведущие колеса может исправляться, так чтобы муфта расцепления привода на ведущие колеса могла применяться точнее. Кроме того, передаточная функция муфты расцепления привода на ведущие колеса может исправляться, не предпринимая действий, которые могут быть заметны водителю.
Далее, со ссылкой на фиг. 43, показана примерная последовательность для обновления или адаптации передаточной функции муфты расцепления привода на ведущие колеса согласно способам по фиг. 41 и 42. Последовательность по фиг. 43 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 43 представляет скорость вращения насосного колеса гидротрансформатора в зависимости от времени. Ось Y представляет скорость вращения насосного колеса гидротрансформатора, и скорость вращения насосного колеса гидротрансформатора возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 4302 представляет требуемую скорость вращения насосного колеса гидротрансформатора.
Второй график сверху по фиг. 43 представляет крутящий момент DISG в зависимости от времени. Ось Y представляет крутящий момент DISG, и крутящий момент DISG увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 43 представляет силу или давление прижатия муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет силу или давление прижатия муфты расцепления привода на ведущие колеса, и сила или давление прижатия возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
До момента T102 времени, скорость вращения насосного колеса гидротрансформатора находится на требуемой частоте 4302 вращения насосного колеса гидротрансформатора, а крутящий момент DISG находится на нижнем уровне. Давление муфты расцепления привода на ведущие колеса также находится на нижнем значении. Если DISG находится на регулировании скорости вращения, амплитуда изменения крутящего момента DISG, требуемого для удержания требуемой скорости вращения насосного колеса, может использоваться в качестве механизма оценки крутящего момента подобно способу, которым крутящий момент двигателя используется на фиг. 42.
В момент T102 времени, давление муфты расцепления привода на ведущие колеса повышается в ответ на запрос увеличить крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса. Крутящий момент DISG не увеличивается, поскольку передаточная функция муфты расцепления привода на ведущие колеса указывает, что крутящий момент не передается муфтой расцепления привода на ведущие колеса при текущем командном значении. Скорость вращения насосного колеса гидротрансформатора остается на требуемой скорости вращения насосного колеса гидротрансформатора, или крутящему моменту DISG не требуется изменяться, в то время как в режиме управления скоростью вращения с замкнутым контуром, и это указывает, что передаточная функция крутящего момента муфты расцепления привода на ведущие колеса, которая оценивает крутящий момент муфты расцепления привода на ведущие колеса, является правильной. Давление расцепления привода на ведущие колеса уменьшается после того, как оно увеличено, так что следующее увеличение давления на муфте расцепления может инициироваться по известному условию.
В момент T103 времени, давление муфты расцепления привода на ведущие колеса повышается второй раз в ответ на запрос увеличить крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса. Крутящий момент DISG вновь не увеличивается, поскольку передаточная функция муфты расцепления привода на ведущие колеса указывает, что крутящий момент не передается муфтой расцепления привода на ведущие колеса при текущем командном значении. Скорость вращения насосного колеса гидротрансформатора уменьшается, или крутящий момент DISG возрастает вследствие регулирования скорости вращения с замкнутым контуром, чтобы указывать, что передаточная функция муфты расцепления привода на ведущие колеса является недооценивающей крутящий момент муфты расцепления привода на ведущие колеса, который передается. Ошибка передаточной функции муфты расцепления привода на ведущие колеса может определяться по датчику крутящего момента на муфте расцепления, току DISG или из модели, как описанная на 4116. Передаточная функция муфты расцепления привода на ведущие колеса регулируется на основании ошибки. В частности, в этом примере, крутящий момент, оцененный для выходной команды, уменьшается на заданную величину. В качестве альтернативы, выходная команда для муфты расцепления привода на ведущие колеса может уменьшаться на заданную величину. Давление расцепления привода на ведущие колеса уменьшается после того, как оно увеличено, так что следующее увеличение давления на муфте расцепления может инициироваться по известному условию.
В момент T104 времени, давление муфты расцепления привода на ведущие колеса повышается третий раз в ответ на запрос увеличить крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса. Крутящий момент DISG увеличивается, поскольку передаточная функция муфты расцепления привода на ведущие колеса указывает, что крутящий момент передается муфтой расцепления привода на ведущие колеса при текущем командном значении. Скорость вращения насосного колеса гидротрансформатора увеличивается, или крутящий момент DISG регулируется посредством регулирования скорости вращения с замкнутым контуром, чтобы не возрастать настолько же сильно, как указывала бы передаточная функция муфты расцепления, чтобы указывать, что передаточная функция крутящего момента муфты расцепления привода на ведущие колеса является переоценивающей крутящий момент муфты расцепления привода на ведущие колеса, который передается. Ошибка передаточной функции муфты расцепления привода на ведущие колеса может определяться, и передаточная функция муфты расцепления привода на ведущие колеса регулироваться на основании ошибки. В частности, в этом примере, крутящий момент, оцененный для выходной команды, увеличивается на заданную величину. В качестве альтернативы, выходная команда для муфты расцепления привода на ведущие колеса может увеличиваться на заданную величину. Давление расцепления привода на ведущие колеса уменьшается после того, как оно увеличено, так что следующее увеличение давления на муфте расцепления может инициироваться по известному условию.
В момент T105 времени, давление муфты расцепления привода на ведущие колеса повышается четвертый раз в ответ на запрос увеличить крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса. Крутящий момент DISG увеличивается, поскольку передаточная функция муфты расцепления привода на ведущие колеса указывает, что крутящий момент передается муфтой расцепления привода на ведущие колеса при текущем командном значении. Скорость вращения насосного колеса гидротрансформатора остается постоянной, чтобы указывать, что передаточная функция муфты расцепления привода на ведущие колеса является правильно оценивающей крутящий момент муфты расцепления привода на ведущие колеса, который передается. Передаточная функция муфты расцепления привода на ведущие колеса не регулируется, поскольку есть меньшая, чем пороговая, величина ошибки в оценке передаточной функции муфты расцепления привода на ведущие колеса. Давление расцепления привода на ведущие колеса уменьшается после того, как оно увеличено, так что следующее увеличение давления на муфте расцепления может инициироваться по известному условию.
Таким образом, передаточная функция, которая описывает крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса, может адаптироваться. Каждое давление прижатия муфты расцепления привода на ведущие колеса в передаточной функции может адаптироваться таким образом, так чтобы вся передаточная функция могла исправляться по мере того, как транспортное средство стареет.
Далее, со ссылкой на фиг. 44, показана примерная последовательность для обновления или адаптации передаточной функции муфты расцепления привода на ведущие колеса согласно способу по фиг. 42. Последовательность крутящих моментов муфт, показанная на фиг. 43, может быть применена к последовательности по фиг. 42. Последовательность по фиг. 44 может быть предусмотрена системой по фиг. 1-3.
Первый график сверху по фиг. 44 представляет собой скорость вращения двигателя в зависимости от времени. Ось Y представляет скорость вращения двигателя, и скорость вращения двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры. Горизонтальная линия 4402 представляет требуемую скорость вращения двигателя.
Второй график сверху по фиг. 44 представляет крутящий момент двигателя в зависимости от времени. Ось Y представляет крутящий момент двигателя, и крутящий момент двигателя увеличивается в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
Третий график сверху по фиг. 44 представляет силу или давление прижатия муфты расцепления привода на ведущие колеса в зависимости от времени. Ось Y представляет силу или давление прижатия муфты расцепления привода на ведущие колеса, и сила или давление прижатия возрастает в направлении стрелки оси Y. Ось X представляет время, и время возрастает от левой стороны фигуры к правой стороне фигуры.
До момента T106 времени, скорость вращения двигателя находится на требуемой скорости вращения 4402 двигателя, и крутящий момент двигателя находится на нижнем уровне. Давление муфты расцепления привода на ведущие колеса также находится на нижнем значении и дает команду муфте расцепления привода на ведущие колеса в разомкнутое положение. Двигатель находится в режиме управления скоростью вращения, и крутящий момент двигателя определяется по числу оборотов двигателя и нагрузке двигателя (например, текущей массе воздуха двигателя, деленной на теоретическую массу воздуха, к всасыванию которой способен двигатель, безнаддувный или с турбонаддувом). Скорость вращения DISG и гидротрансформатора (не показана) отрегулированы на скорость вращения, иную чем требуемая скорость вращения двигателя.
В момент T106 времени, давление муфты расцепления привода на ведущие колеса повышается в ответ на запрос увеличить крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса. Скорость вращения DISG (не показана) остается постоянной, и требуемая скорость вращения двигателя остается постоянным, в то время как увеличивается сила прижатия муфты расцепления привода на ведущие колеса. Крутящий момент двигателя в начале остается на постоянном уровне, в то время как муфта расцепления привода на ведущие колеса постепенно смыкается.
В момент T107 времени, давление муфты расцепления привода на ведущие колеса продолжает возрастать, и скорость вращения двигателя начинает замедляться до скорости вращения, меньшей чем требуемая скорость вращения двигателя. Контур регулирования скорости вращения двигателя повышает крутящий момент двигателя (например, посредством открывания дросселя двигателя) в ответ на разность между требуемой скоростью вращения двигателя и фактической скоростью вращения двигателя. Оцененный крутящий момент муфты расцепления привода на ведущие колеса является разностью между крутящим моментом двигателя до момента T106 времени и крутящим моментом двигателя в момент времени после T106, когда сила прижатия муфты расцепления привода на ведущие колеса повышается (например, в момент времени вскоре после момента T107 времени). Передаточная функция муфты расцепления привода на ведущие колеса, которая выводит силу или давление прижатия муфты расцепления привода на ведущие колеса в ответ на требуемый крутящий момент муфты расцепления привода на ведущие колеса, может регулироваться на основании оцененного крутящего момента привода на ведущие колеса.
В этом примере, элементы передаточной функции муфты расцепления привода на ведущие колеса, которые отличаются от оцененных значений крутящего момента муфты расцепления привода на ведущие колеса, определенных при командном давлении муфты расцепления привода на ведущие колеса, могут обновляться оцененным крутящим моментом муфты расцепления привода на ведущие колеса или долей ошибки, если они отличаются от оцененного крутящего момента муфты расцепления привода на ведущие колеса на большую, чем пороговая, величину крутящего момента. Передаточная функция муфты расцепления привода на ведущие колеса может обновляться по мере того, как происходит процесс адаптации, или после того, как последовательность завершена. Также должно быть отмечено, что скорость вращения двигателя может увеличиваться вместо уменьшения в момент T107 времени, когда скорость вращения насосного колеса гидротрансформатора является большей, чем скорость вращения двигателя. В этом примере, скорость вращения насосного колеса гидротрансформатора регулируется на скорость вращения, большую чем скорость вращения двигателя, так чтобы скорость вращения двигателя возрастало в момент T107 времени, когда смыкается муфта расцепления привода на ведущие колеса.
В момент T108 времени, давление муфты расцепления привода на ведущие колеса понижается в ответ на запрос уменьшить крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса. Фактическая скорость вращения двигателя больше, чем требуемая скорость вращения двигателя после того, как уменьшено давление прижатия муфты расцепления привода на ведущие колеса. Передаточная функция муфты расцепления привода на ведущие колеса может обновляться, когда оцененный крутящий момент муфты расцепления привода на ведущие колеса отличается от записи в передаточной функции муфты расцепления привода на ведущие колеса, отличается от оцененного крутящего момента муфты расцепления привода на ведущие колеса.
Таким образом, передаточная функция, которая описывает крутящий момент, передаваемый муфтой расцепления привода на ведущие колеса, может адаптироваться. Каждое давление прижатия муфты расцепления привода на ведущие колеса в передаточной функции может адаптироваться таким образом, так чтобы вся передаточная функция могла исправляться по мере того, как транспортное средство стареет.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают способ адаптации муфты расцепления привода на ведущие колеса, содержащий: регулирование прижатия муфты расцепления привода на ведущие колеса в приводе на ведущие колеса транспортного средства в ответ на датчик крутящего момента, в то время как двигатель в приводе на ведущие колеса транспортного средства не является сжигающим воздух и топливо. Таким образом, передаточная функция муфты расцепления привода на ведущие колеса может адаптироваться для улучшения ездовых качеств транспортного средства. Способ дополнительно содержит адаптацию передаточной функции муфты расцепления привода на ведущие колеса в ответ на датчик крутящего момента. Способ включает в себя те случаи, когда передаточная функция муфты расцепления привода на ведущие колеса адаптируется в ответ на реакцию компонентов привода на ведущие колеса.
В некоторых примерах, способ включает в себя те случаи, когда регулирование прижатия муфты расцепления привода на ведущие колеса основана на повышении давления прижатия муфты расцепления привода на ведущие колеса из состояния, где муфта расцепления привода на ведущие колеса разомкнута. Способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор является вращающимся во время регулирования прижатия муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда блокировочная муфта трансмиссии размыкается во время регулирования прижатия муфты расцепления привода на ведущие колеса.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают способ адаптации муфты расцепления привода на ведущие колеса, содержащий: вращение насосного колеса гидротрансформатора на скорости вращения, меньшей, чем скорость вращения, где большая, чем пороговая, доля крутящего момента насосного колеса гидротрансформатора передается на турбину гидротрансформатора, насосное колесо гидротрансформатора находится в приводе на ведущие колеса транспортного средства; и регулирование прижатия муфты расцепления привода на ведущие колеса в приводе на ведущие колеса транспортного средства в ответ на датчик крутящего момента, в то время как двигатель в приводе на ведущие колеса транспортного средства не является сжигающим воздух и топливо. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда скорость вращения меньше, чем 700 оборотов в минуту.
В одном из примеров, способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда сила прижатия регулируется посредством адаптации передаточной функции муфты расцепления привода на ведущие колеса. Способ адаптации муфты расцепления привода на ведущие колеса дополнительно содержит увеличение команды муфты расцепления привода на ведущие колеса и регулирование передаточной функции муфты расцепления привода на ведущие колеса на основании выходного сигнала датчика крутящего момента. Способ адаптации муфты расцепления привода на ведущие колеса дополнительно содержит подачу команды размыкания муфты расцепления привода на ведущие колеса. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда насосное колесо гидротрансформатора вращается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор вращается на скорости вращения, которая удерживает муфту трансмиссии в прижатом состоянии. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда насосное колесо гидротрансформатора вращается на скорости вращения, большей, чем скорость вращения турбины гидротрансформатора.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, для коррекции оценки крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса, в ответ на выходной сигнал датчика крутящего момента. Система транспортного средства включает в себя те случаи, когда двигатель не является сжигающим воздух и топливо.
В некоторых примерах, система транспортного средства дополнительно содержит вращение DISG на скорости вращения, ниже которой пороговый процент крутящего момента DISG передается на трансмиссию. Система транспортного средства дополнительно содержит гидротрансформатор, включающий в себя муфту гидротрансформатора, и дополнительные команды для размыкания муфты гидротрансформатора наряду с регулированием оценки крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные команды для вращения насосного колеса гидротрансформатора на более высокой скорости вращения, чем турбина гидротрансформатора. Система транспортного средства дополнительно содержит дополнительные команды для повышения силы смыкания, прикладываемой к муфте расцепления привода на ведущие колеса.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают способ адаптации муфты расцепления привода на ведущие колеса, содержащий: вращение насосного колеса гидротрансформатора на первой скорости вращения; приведение в действие двигателя в режиме управления скоростью вращения и вращение двигателя на второй скорости вращения, отличном от первой скорости вращения; и регулирование передаточной функции муфты расцепления привода на ведущие колеса в ответ на оценку крутящего момента на основании условий эксплуатации двигателя. Способ включает в себя те случаи, когда насосное колесо гидротрансформатора вращается посредством встроенного в привод на ведущие колеса стартера/генератора.
В некоторых примерах, способ включает в себя те случаи, когда вторая скорость вращения больше, чем первая скорость вращения. Способ включает в себя те случаи, когда вторая скорость вращения меньше, чем первая скорость вращения. Способ включает в себя те случаи, когда условия эксплуатации двигателя являются скоростью вращения двигателя и нагрузкой двигателя. Способ дополнительно содержит подачу команды увеличения силы прижатия муфты расцепления привода на ведущие колеса. Способ дополнительно содержит регулирование крутящего момента двигателя для поддержания скорости вращения двигателя на второй скорости вращения наряду с подачей команды увеличения силы прижатия муфты расцепления привода на ведущие колеса.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают способ адаптации муфты расцепления привода на ведущие колеса, содержащий: вращение насосного колеса гидротрансформатора на первой скорости вращения; приведение в действие двигателя в режиме управления скоростью вращения и вращение двигателя на второй скорости вращения, отличной от первой скорости вращения; сохранение значения выходного крутящего момента двигателя в ответ на разомкнутую муфту расцепления привода на ведущие колеса; с определенным приращением смыкание муфты расцепления привода на ведущие колеса; и регулирование передаточной функции муфты расцепления привода на ведущие колеса в ответ на разность между оценкой крутящего момента, основанной на условиях эксплуатации двигателя, и оценкой крутящего момента, основанной на передаточной функции муфты расцепления привода на ведущие колеса.
В одном из примеров, способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда первая скорость вращения меньше, чем 700 оборотов в минуту. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда условия эксплуатации двигателя являются скоростью вращения и нагрузкой двигателя. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда оценка крутящего момента на основании условий эксплуатации двигателя является крутящим моментом двигателя минус крутящий момент двигателя, сохраненный во время разомкнутой муфты расцепления привода на ведущие колеса. Способ адаптации муфты расцепления привода на ведущие колеса также включает в себя те случаи, когда скорость вращения двигателя регулируется посредство регулирования крутящего момента двигателя во время режима регулирования скорости вращения. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда насосное колесо гидротрансформатора вращается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор вращается на скорости вращения, которая удерживает муфту трансмиссии в прижатом состоянии. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда насосное колесо гидротрансформатора вращается на скорости вращения, большей, чем скорость вращения турбины гидротрансформатора.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, для коррекции оценки крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса, в ответ на оценку крутящего момента двигателя. Система транспортного средства включает в себя те случаи, когда оценка крутящего момента двигателя основана на скорости вращения и нагрузке двигателя.
В некоторых примерах, система транспортного средства дополнительно содержит дополнительные команды для вращения DISG и двигателя на скорости вращения, ниже которой пороговый процент крутящего момента DISG передается на трансмиссию. Система транспортного средства дополнительно содержит дополнительные команды для вращения DISG на скорости вращения, которая меньше, чем скорость вращения у вращения двигателя. Система транспортного средства дополнительно содержит дополнительные команды для выполнения регулирования скорости вращения двигателя с замкнутым контуром посредством регулирования крутящего момента двигателя наряду с оценкой крутящего момента двигателя.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают способ адаптации муфты расцепления привода на ведущие колеса, содержащий: регулирование прижатия муфты расцепления привода на ведущие колеса в приводе на ведущие колеса транспортного средства в ответ на датчик крутящего момента, в то время как двигатель в приводе на ведущие колеса транспортного средства не является сжигающим воздух и топливо. Способ дополнительно содержит адаптацию передаточной функции муфты расцепления привода на ведущие колеса в ответ на датчик крутящего момента. Способ включает в себя те случаи, когда передаточная функция муфты расцепления привода на ведущие колеса адаптируется в ответ на реакцию компонентов привода на ведущие колеса. Способ включает в себя те случаи, когда регулирование прижатия муфты расцепления привода на ведущие колеса основана на повышении давления прижатия муфты расцепления привода на ведущие колеса из состояния, где муфта расцепления привода на ведущие колеса разомкнута. Способ включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор является вращающимся во время регулирования прижатия муфты расцепления привода на ведущие колеса. Способ включает в себя те случаи, когда блокировочная муфта трансмиссии размыкается во время регулирования прижатия муфты расцепления привода на ведущие колеса.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают способ адаптации муфты расцепления привода на ведущие колеса, содержащий: вращение насосного колеса гидротрансформатора на скорости вращения, меньшей, чем скорость вращения, где большая, чем пороговая, доля крутящего момента насосного колеса гидротрансформатора передается на турбину гидротрансформатора, насосное колесо гидротрансформатора находится в приводе на ведущие колеса транспортного средства; и регулирование прижатия муфты расцепления привода на ведущие колеса в приводе на ведущие колеса транспортного средства в ответ на датчик крутящего момента, в то время как двигатель в приводе на ведущие колеса транспортного средства не является сжигающим воздух и топливо. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда скорость вращения меньше, чем 700 оборотов в минуту.
В некоторых примерах, способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда сила прижатия регулируется посредством адаптации передаточной функции муфты расцепления привода на ведущие колеса. Способ адаптации муфты расцепления привода на ведущие колеса дополнительно содержит увеличение команды муфты расцепления привода на ведущие колеса и регулирование передаточной функции муфты расцепления привода на ведущие колеса на основании выходного сигнала датчика крутящего момента. Способ адаптации муфты расцепления привода на ведущие колеса дополнительно содержит подачу команды размыкания муфты расцепления привода на ведущие колеса. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда насосное колесо гидротрансформатора вращается посредством встроенного в привод на ведущие колеса стартера/генератора. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда встроенный в привод на ведущие колеса стартер/генератор вращается на скорости вращения, которая удерживает муфту трансмиссии в прижатом состоянии. Способ адаптации муфты расцепления привода на ведущие колеса включает в себя те случаи, когда насосное колесо гидротрансформатора вращается на скорости вращения, большей, чем скорость вращения турбины гидротрансформатора.
Способы и системы по фиг. 1-3 и 41-44 также предусматривают систему транспортного средства, содержащую: двигатель; маховик двойной массы, включающий в себя первую сторону, механически присоединенную к двигателю; муфту расцепления привода на ведущие колеса, включающую в себя первую сторону, механически присоединенную к второй стороне маховика двойной массы; встроенный в привод на ведущие колеса стартер/генератор (DISG), включающий в себя первую сторону, присоединенную к второй стороне муфты расцепления привода на ведущие колеса; трансмиссию, избирательно присоединяемую к двигателю через муфту расцепления привода на ведущие колеса; и контроллер, содержащий выполняемые команды, хранимые в постоянной памяти, для коррекции оценки крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса, в ответ на выходной сигнал датчика крутящего момента.
В одном из примеров, система транспортного средства включает в себя те случаи, когда двигатель не является сжигающим воздух и топливо. Система транспортного средства дополнительно содержит вращение DISG на скорости вращения, ниже которой пороговый процент крутящего момента DISG передается на трансмиссию. Система транспортного средства дополнительно содержит гидротрансформатор, включающий в себя муфту гидротрансформатора, и дополнительные команды для размыкания муфты гидротрансформатора наряду с регулированием оценки крутящего момента, передаваемого через муфту расцепления привода на ведущие колеса. Система транспортного средства дополнительно содержит дополнительные команды для вращения насосного колеса гидротрансформатора на более высокой скорости вращения, чем турбина гидротрансформатора. Система транспортного средства дополнительно содержит дополнительные команды для повышения силы смыкания, прикладываемой к муфте расцепления привода на ведущие колеса.
Способы и системы, описанные выше, могут логически выводить крутящий момент в разных местоположениях гидротрансформатора. Фиг. 45-48 описывают один из примеров определения крутящего момента на насосном колесе и турбине гидротрансформатора.
Далее, со ссылкой на фиг. 45, показана функция, которая описывает коэффициент K гидротрансформатора. Коэффициент K гидротрансформатора связан с соотношением скоростей вращения насосного колеса и турбины гидротрансформатора. Коэффициент K по фиг. 45 может быть выражен как:
где K - коэффициент K гидротрансформатора, Nturbine - скорость вращения турбины гидротрансформатора, и Nimpeller - скорость вращения насосного колеса гидротрансформатора, а fn - функция, описывающая коэффициент K. Затем, крутящий момент на насосном колесе гидротрансформатора может быть описан согласно:
где Timp - крутящий момент насосного колеса гидротрансформатора, и где 1,558 - коэффициент преобразования из фунтов силы на фут в Н∙м. Вышеприведенные зависимости сохраняются для соотношений скоростей вращения <1.
Далее, со ссылкой на фиг. 46, показана функция, которая описывает коэффициент несущей способности гидротрансформатора в качестве функции отношения скорости вращения насосного колеса гидротрансформатора к скорости вращения турбины гидротрансформатора. Коэффициент несущей способности связан с коэффициентом K согласно уравнению:
где Capacity_Factor - коэффициент несущей способности гидротрансформатора, и где K - коэффициент K гидротрансформатора, описанный выше. Функция, описанная на фиг. 46, может использоваться вместе с функциями, описанными на фиг. 47 и 48, для моделирования режимов работы гидротрансформатора. Отдельные элементы, которые формируют кривую, показанную на фиг. 46, могут определяться опытным путем и сохраняться в памяти контроллера.
Далее, со ссылкой на фиг. 47, показана функция, которая описывает коэффициент трансформации крутящего момента (TR) гидротрансформатора в качестве функции отношения скорости вращения насосного колеса гидротрансформатора к скорости вращения турбины гидротрансформатора. Функция, описанная на фиг. 47, может использоваться вместе с функциями, описанными на фиг. 46 и 48, для моделирования режимов работы гидротрансформатора. Отдельные элементы, которые формируют кривую, показанную на фиг. 47, могут определяться опытным путем и сохраняться в памяти контроллера. Функция, показанная на фиг. 47, включает в себя ось Y, которая представляет коэффициент трансформации крутящего момента гидротрансформатора. Ось X представляет отношение скоростей вращения насосного колеса к турбине гидротрансформатора. Может наблюдаться, что есть обратная зависимость между коэффициентом трансформации крутящего момента гидротрансформатора и отношением скоростей вращения насосного колеса к турбине гидротрансформатора. TR может быть описан в качестве:
где TR коэффициент трансформации крутящего момента гидротрансформатора, fn - функция, описывающая коэффициент трансформации крутящего момента, Nturbine - скорость вращения турбины гидротрансформатора, и Nimpeller - скорость вращения насосного колеса гидротрансформатора. Коэффициент трансформации крутящего момента гидротрансформатора связан с частотой вращения насосного колеса гидротрансформатора посредством уравнения:
или
Далее, со ссылкой на фиг. 48, показана функция, которая описывает коэффициент несущей способности гидротрансформатора по фиг. 46, умноженный на коэффициент трансформации крутящего момента гидротрансформатора по фиг. 47, в качестве функции отношения скорости вращения насосного колеса гидротрансформатора к скорости вращения турбины гидротрансформатора.
Функция, описанная на фиг. 48, может использоваться вместе с функциями, описанными на фиг. 46 и 47, для моделирования режимов работы гидротрансформатора. Отдельные элементы, которые формируют кривую, показанную на фиг. 48, могут определяться опытным путем и сохраняться в памяти контроллера. Функция, показанная на фиг. 48, включает в себя ось Y, которая представляет коэффициент несущей способности гидротрансформатора, умноженный на коэффициент трансформации крутящего момента гидротрансформатора. Ось Y представляет отношение скоростей вращения насосного колеса к турбине гидротрансформатора.
В одном из примеров, функция на фиг. 46 индексируется посредством отношения скорости вращения насосного колеса гидротрансформатора к скорости вращения турбины гидротрансформатора, и ее выходной сигнал умножается на возведенную в квадрат скорость вращения насосного колеса гидротрансформатора, чтобы давать оценку крутящего момента насосного колеса гидротрансформатора. Функция на фиг. 47 индексируется посредством отношения скорости вращения насосного колеса гидротрансформатора к скорости вращения турбины гидротрансформатора, и ее выходной сигнал умножается на функцию на фиг. 48, чтобы давать оценку крутящего момента турбины гидротрансформатора. Крутящий момент на гидротрансформаторе является разностью между крутящим моментом насосного колеса гидротрансформатора и крутящим моментом турбины гидротрансформатора. Конечно, также могут выполняться обратные операции для определения скорости вращения насосного колеса гидротрансформатора и скорости вращения турбины гидротрансформатора.
Таким образом, работа гидротрансформатора может оцениваться согласно модели, содержащей функции, описанные на фиг. 45-48. В частности, гидротрансформатор может давать оценку крутящего момента насосного колеса гидротрансформатора или крутящего момента турбины гидротрансформатора в качестве оценки крутящего момента DISG или крутящего момента колес, поскольку гидротрансформатор механически присоединен к DISG и трансмиссии.
Следует принимать во внимание рядовым специалистом в данной области техники, способы, описанные на фиг. 4-44, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, различные проиллюстрированные этапы или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения целей, признаков и преимуществ, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Хотя не проиллюстрировано явным образом, рядовой специалист в данной области техники будет осознавать, что одни или более из проиллюстрированных этапов или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии.
Это завершает описание. Прочтение его специалистами в данной области техники напомнило бы многие изменения и модификации, не выходя из сущности и объема описания. Например, рядные двигатели I3, I4, I5, V-образные двигатели V6, V8, V10 и V12, работающие на природном газе, бензине, дизельном топливе или альтернативных топливных конфигурациях, могли бы использовать настоящее изобретение для получения преимущества.
Реферат
Изобретение относится к области вспомогательных устройств запуска двигателя внутреннего сгорания. При останове двигателя (10) регулируют скорость вращения встроенного в привод на ведущие колеса стартера/генератора (DISG) (240) на требуемую скорость вращения, которая обеспечивает требуемое давление в маслопроводе муфты трансмиссии (208) в ответ на запрос остановить вращение двигателя (10). Осуществляют проскальзывание муфты расцепления (236) привода на ведущие колеса в приводе на ведущие колеса между DISG (240) и двигателем (10), чтобы останавливать двигатель (10) в требуемом положении. Предложены также способ останова двигателя транспортного средства и транспортное средство. Достигается сокращение времени запуска двигателя и экономия топлива, уменьшение выбросов. 3 н. и 17 з.п. ф-лы, 48 ил.
Комментарии