Устройство управления для двигателя внутреннего сгорания - RU2429362C2
Код документа: RU2429362C2
Чертежи













Описание
Настоящее изобретение относится к устройству управления для двигателя внутреннего сгорания, которое имеет регулируемый клапанный механизм, который изменяет характеристики впускного клапана, и, в частности, относится к способу управления и устройству управления для двигателя внутреннего сгорания, имеющего механизм изменения высоты подъема и механизм изменения фаз газораспределения в качестве регулируемых клапанных механизмов.
Двигатель внутреннего сгорания, оборудованный регулируемым клапанным механизмом, который изменяет характеристики впускного клапана согласно рабочему состоянию двигателя, введен в практическое применение. В качестве этого типа регулируемого клапанного механизма широко известен механизм изменения фаз газораспределения, который изменяет фазы газораспределения впускного клапана, который открывается и закрывается посредством распределительного вала посредством изменения фазы вращения распределительного вала относительно коленчатого вала.
В последние годы предложен механизм изменения высоты подъема (см. публикацию заявки на патент Японии №2001-263015 (JP-A-2001-263015)), который допускает непрерывное изменение максимального значения подъема и времени подъема посредством непрерывного изменения высоты подъема впускного клапана. В этом механизме изменения высоты подъема высота подъема становится максимальной, когда движущаяся часть помещается в позицию ограничения перемещения на одной стороне в пределах указанного диапазона перемещения. Затем, посредством изменения позиции движущейся части в этом диапазоне перемещения, высота подъема впускного клапана варьируется. Устройство управления двигателя внутреннего сгорания, имеющее этот тип механизма изменения высоты подъема, определяет текущую высоту подъема на основе суммарного перемещения движущейся части от базовой позиции, которая задается на основе позиции ограничения перемещения, где высота подъема становится наибольшей.
Двигатель внутреннего сгорания, имеющий этот тип механизма изменения высоты подъема и вышеупомянутого механизма изменения фаз газораспределения, изменяет фазы газораспределения согласно высоте подъема впускного клапана, задаваемой посредством механизма изменения высоты подъема (т.е. выполняет согласованное управление механизма изменения высоты подъема и механизма изменения фаз газораспределения). Посредством этого фазы газораспределения и высота подъема впускного клапана могут точно управляться согласно рабочему состоянию двигателя, и возможны повышение выходной мощности, оптимизация расхода топлива и свойств выхлопа.
Тем не менее устройство управления двигателя внутреннего сгорания, имеющее вышеупомянутый тип механизма изменения высоты подъема, иногда может быть неспособно распознавать высоту подъема, когда внезапное прекращение (т.е. так называемое мгновенное прерывание) подачи электропитания возникает вследствие повреждения линии питания для подачи электроэнергии в устройство управления и т.п. и теряется суммарное перемещение движущейся части, записанное в запоминающем устройстве. Кроме того, когда величина смещения движущейся части изменилась по какой-либо причине в ходе останова двигателя, в течение которого электроэнергия не подается в устройство управления, и величина смещения движущейся части не отслеживается, возникает несоответствие между высотой подъема, предполагаемой посредством устройства управления, и фактической высотой подъема.
Когда возникает несоответствие между высотой подъема, предполагаемой посредством устройства управления, и фактической высотой подъема таким образом и устройство управления, как следствие, становится неспособным точно понимать фактическую высоту подъема, фазы газораспределения, заданные на основе высоты подъема, предполагаемой посредством устройства управления, становятся неподходящими для рабочего состояния двигателя. Это приводит к нестабильности рабочего состояния двигателя, и имеется проблема в том, что это может вызывать возникновение пропусков зажигания, детонацию и т.п. в некоторых случаях.
В частности, когда фазы газораспределения впускного клапана смещаются в сторону опережения в состоянии, где высота подъема впускного клапана является чрезвычайно большой, как указано на фиг.14А, поскольку время IVO открытия впускного клапана становится ранним, перекрытие клапанов становится чрезмерно большим, и величина внутренней EGR увеличивается. Это приводит к недостаточной подаче кислорода для сгорания, нестабильности сгорания и большему риску пропусков зажигания. Кроме того, когда фазы газораспределения впускного клапана смещаются в сторону запаздывания в состоянии, где высота подъема впускного клапана является чрезвычайно малой, как указано на фиг.14В, время IVO открытия впускного клапана находится в или после верхней мертвой точки и время IVC закрытия клапана находится около нижней мертвой точки. Как результат, увеличивается отрицательное давление в камере сгорания во время открытия впускного клапана, скорость потока воздуха, вводимого в камеру сгорания, увеличивается в это время, и впускной клапан закрывается, и сжатие начинается около нижней мертвой точки, что приводит к повышению температуры и давлению в камере сгорания и большему риску детонации.
Настоящее изобретение обеспечивает устройство управления и способ управления для двигателя внутреннего сгорания, которые допускают подавление возникновения пропусков зажигания и детонации, даже когда становится невозможным точное управление высоты подъема впускного клапана посредством устройства управления.
Первый аспект настоящего изобретения относится к устройству управления для двигателя внутреннего сгорания, имеющему: механизм изменения фаз газораспределения для изменения фаз газораспределения впускного клапана; механизм изменения высоты подъема для изменения максимального значения подъема и времени подъема впускного клапана посредством смещения движущейся части; средство определения позиции для задания базовой позиции на основе позиции ограничения перемещения, где максимальное значение подъема и время подъема становятся наибольшими, и для определения позиции движущейся части на основе суммарного перемещения движущейся части от базовой позиции; и средство управления для выполнения согласованного управления посредством задания целевой позиции движущейся части на основе запрашиваемого объема всасываемого воздуха, перемещения движущейся части таким образом, что определенная позиция движущейся части становится целевой позицией, чтобы управлять механизмом изменения высоты подъема, и управления механизмом изменения фаз газораспределения согласно состоянию управления механизма изменения высоты подъема. Вышеупомянутое устройство управления дополнительно включает в себя средство оценки отклонения для оценки того, является ли несоответствие между позицией движущейся части, определяемой посредством средства определения, и фактической позицией движущейся части большим. Средство управления, когда несоответствие оценено как большое посредством средства оценки отклонения (в течение периода времени, когда несоответствие оценено как большое), запрещает согласованное управление и управляет механизмом изменения фаз газораспределения на основе нагрузки двигателя.
Когда нагрузка двигателя является небольшой, т.е. когда объем воздуха, вводимый в камеру сгорания во время такта впуска воздуха, является небольшим, вследствие нехватки кислорода в камере сгорания, сгорание становится нестабильным, и легко возникают пропуски зажигания. Тем не менее, когда нагрузка двигателя является большой, т.е. когда объем воздуха, вводимый в камеру сгорания во время такта впуска воздуха, является большим, легко возникает детонация, поскольку температура и давление в камере сгорания легко повышаются во время хода сжатия. Таким образом, в вышеупомянутом первом аспекте изобретения, когда несоответствие между фактической позицией движущейся части и позицией движущейся части, определяемой посредством средства определения, оценено как большое (т.е. когда контроллер оценивает, что несоответствие между фактической высотой подъема и максимальным значением подъема и временем подъема (упоминаемым в дальнейшем просто как "высота подъема") впускного клапана, предполагаемым посредством устройства управления, является большим), согласованное управление запрещается, и механизм изменения фаз газораспределения управляется на основе нагрузки двигателя. По этой причине задание фаз газораспределения на основе неточного состояния управления механизма изменения высоты подъема исключается, и можно изменять фазы газораспределения таким образом, что возникновение пропусков зажигания подавляется, когда нагрузка двигателя является небольшой, и возникновение детонации подавляется, когда нагрузка двигателя является большой. Как результат, даже когда высота подъема впускного клапана не может быть точно предполагаемой посредством устройства управления, возникновение пропусков зажигания и детонация могут подавляться.
Когда фазы газораспределения впускного клапана смещаются в сторону опережения в состоянии, где высота подъема впускного клапана является чрезвычайно большой, перекрытие клапанов становится чрезмерным, кислорода, подаваемого посредством сгорания, становится недостаточно, сгорание становится нестабильным и имеется тенденция того, что легко возникают пропуски зажигания. Тем не менее, когда фазы газораспределения впускного клапана смещаются в сторону запаздывания в состоянии, где высота подъема впускного клапана является очень небольшой, время открытия впускного клапана находится в или после верхней мертвой точки, время закрытия клапана находится около нижней мертвой точки, температура и давление в камере сгорания имеют тенденцию к повышению, и легко возникает детонация.
Таким образом, если несоответствие между фактической позицией движущейся части и позицией движущейся части, определяемой посредством средства определения, оценено как большое посредством средства оценки отклонения, механизм изменения фаз газораспределения может управляться таким образом, что фазы газораспределения впускного клапана смещаются больше в сторону запаздывания по мере того, как нагрузка двигателя понижается, и таким образом, что фазы газораспределения впускного клапана смещаются больше в сторону опережения по мере того, как нагрузка двигателя повышается.
Согласно этой конфигурации, когда нагрузка двигателя является небольшой (т.е. когда легко возникают пропуски зажигания, хотя детонация не имеет тенденцию возникать), фазы газораспределения впускного клапана устанавливаются в сторону запаздывания, и даже в условиях, когда высота подъема впускного клапана не может быть точно известна, можно исключать задание характеристик впускного клапана равными характеристикам клапана, которые могут приводить к легкому возникновению пропусков зажигания, и поэтому возникновение пропусков зажигания может надлежащим образом подавляться. Кроме того, когда нагрузка двигателя является высокой (т.е. когда легко возникает детонация, хотя пропуски зажигания не имеют тенденции возникать), фазы газораспределения впускного клапана смещаются в сторону опережения, и даже в состоянии, когда высота подъема впускного клапана не может быть точно известна, можно исключать задание характеристик впускного клапана равными характеристикам клапана, которые могут приводить к легкому возникновению детонации, и поэтому возникновение детонации может надлежащим образом подавляться.
Вышеупомянутое устройство управления дополнительно может включать в себя средство распознавания, которое выполняет распознавание максимальной позиции, чтобы корректировать суммарное перемещение, при одновременном регулировании величины всасываемого воздуха с использованием дроссельного клапана пути впуска воздуха, посредством перемещения движущейся части таким образом, что максимальное значение подъема и время подъема увеличиваются, и распознавание позиции остановки движущейся части как позиции ограничения перемещения. Это средство распознавания может выполнять вышеупомянутое распознавание максимальной позиции, когда вышеупомянутое несоответствие оценено как большое посредством средства оценки отклонения.
При этой конфигурации посредством выполнения распознавания максимальной позиции можно исключать несоответствие между фактической высотой подъема и высотой подъема, предполагаемой посредством устройства управления. Кроме того, поскольку распознавание максимальной позиции выполняется посредством управления движущейся частью таким образом, что высота подъема становится большой, при одновременном регулировании объема всасываемого воздуха посредством дроссельного клапана, может сдерживаться чрезмерное увеличение объема всасываемого воздуха посредством дросселирования дроссельного клапана, и распознавание максимальной позиции может выполняться даже в ходе работы двигателя.
Кроме того, когда объем всасываемого воздуха регулируется посредством дроссельного клапана вышеописанным способом, выходная мощность двигателя может быть изменена посредством изменения степени открытия дроссельного клапана, даже в ходе выполнения распознавания максимальной позиции. Когда степень открытия дроссельного клапана изменяется таким образом, вероятности возникновения пропусков зажигания и детонации изменяются соответственно вследствие изменения нагрузки двигателя. Таким образом, когда приспособлена конфигурация, в которой распознавание максимальной позиции выполняется таким образом, вследствие приспосабливания также конфигурации, в которой фазы газораспределения изменяются на основе нагрузки двигателя вышеописанным способом, фазы газораспределения изменяются согласно вероятностям возникновения пропусков зажигания и детонации, которые сопровождают изменение нагрузки двигателя, и более подходящее управление возникновением пропусков зажигания и детонацией становится возможным.
Средство управления может изменять максимальное значение подъема и время подъема вышеупомянутого впускного клапана посредством перемещения вышеупомянутой движущейся части в пределах определенного диапазона регулирования, заданного в пределах диапазона, который уже диапазона перемещения движущейся части и находится в пределах диапазона перемещения движущейся части.
Когда изменение высоты подъема впускного клапана предпринято посредством управления движущейся частью по всему диапазону перемещения, определенному посредством позиции ограничения перемещения, где высота подъема впускного клапана становится наибольшей (упоминаемой в дальнейшем как верхнее ограничение), и позицией ограничения перемещения, где высота подъема впускного клапана становится наименьшей (упоминаемой в дальнейшем как нижнее ограничение), удар происходит каждый раз, когда перемещение движущейся части прекращается в нижнем ограничении и верхнем ограничении по мере того, как высота подъема изменяется, и, таким образом, есть проблема в том, что это может вызывать снижение долговечности механизма изменения высоты подъема. Когда эта проблема разрешается посредством изменения высоты подъема посредством перемещения движущейся части в указанном диапазоне регулирования, который задается равным диапазону, который уже диапазона перемещения, ограниченного посредством нижнего ограничения и верхнего ограничения, как описано выше, можно не допускать возникновения удара, который возникает вследствие прекращения перемещения движущейся части посредством нижнего ограничения и верхнего ограничения, когда высота подъема изменена, так что возможно повышение долговечности механизма изменения высоты подъема.
Когда нагрузка является чрезвычайно низкой, например, при работе на холостом ходу, сгорание становится нестабильным, и легко возникают пропуски зажигания. Следовательно, когда вышеупомянутое несоответствие оценено как большое посредством вышеупомянутого средства оценки отклонения, скорость вращения на холостом ходу может быть увеличена до значения выше скорости вращения на холостом ходу во время нормального режима эксплуатации. Посредством этого можно стабилизировать сгорание и надлежащим образом подавлять возникновение пропусков зажигания.
Кроме того, при выполнении распознавания максимальной позиции вышеописанным способом, поскольку движущаяся часть управляется вплоть до верхнего ограничения, где высота подъема впускного клапана становится наибольшей, перекрытие клапанов становится чрезмерно большим, и легко возникают пропуски зажигания. Таким образом, в ходе выполнения распознавания максимальной позиции скорость вращения на холостом ходу предпочтительно увеличивается.
Второй аспект настоящего изобретения относится к устройству управления для двигателя внутреннего сгорания, которое включает в себя: механизм изменения фаз газораспределения для изменения фаз газораспределения впускного клапана; механизм изменения высоты подъема для изменения максимального значения подъема и времени подъема впускного клапана посредством смещения движущейся части; средство определения позиции для задания базовой позиции на основе позиции ограничения перемещения, где максимальное значение подъема и время подъема становятся наибольшими, и для определения позиции движущейся части на основе суммарного перемещения движущейся части от базовой позиции; и средство управления для выполнения согласованного управления, при котором целевая позиция движущейся части задается на основе запрашиваемого объема всасываемого воздуха, движущаяся часть перемещается таким образом, что определенная позиция движущейся части становится целевой позицией, чтобы управлять механизмом изменения высоты подъема, и механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема. Устройство управления включает в себя средство оценки отклонения для оценки того, отличается ли определенная позиция движущейся части от позиции движущейся части, которая должна быть определена, при этом в течение периода времени, когда оценено, что определенная позиция движущейся части отличается от позиции движущейся части, которая должна быть определена, средство управления запрещает согласованное управление и управляет механизмом изменения фаз газораспределения на основе нагрузки двигателя.
Третий аспект настоящего изобретения относится к устройству управления для двигателя внутреннего сгорания, включающему в себя: механизм изменения фаз газораспределения, который изменяет фазы газораспределения впускного клапана; механизм изменения высоты подъема, который изменяет максимальное значение подъема и время подъема впускного клапана посредством смещения движущейся части; модуль определения позиции, который определяет позицию движущейся части; контроллер, который выполняет согласованное управление, при котором целевая позиция движущейся части задается на основе запрашиваемого объема всасываемого воздуха, движущаяся часть перемещается таким образом, что позиция движущейся части становится целевой позицией движущейся части, чтобы управлять механизмом изменения высоты подъема, и механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема; и узел оценки, который оценивает то, является ли несоответствие между определенной позицией движущейся части и фактической позицией движущейся части большим. Контроллер запрещает согласованное управление, когда несоответствие, оцененное между определенной позицией движущейся части и фактической позицией движущейся части, является большим.
Четвертый аспект настоящего изобретения относится к устройству управления для двигателя внутреннего сгорания, включающему в себя: механизм изменения фаз газораспределения, который изменяет фазы газораспределения впускного клапана; механизм изменения высоты подъема, который изменяет максимальное значение подъема и время подъема впускного клапана посредством смещения движущейся части; модуль определения позиции, который определяет позицию движущейся части; контроллер, который выполняет согласованное управление, при котором целевая позиция движущейся части задается на основе запрашиваемого объема всасываемого воздуха, движущаяся часть перемещается таким образом, что позиция движущейся части становится целевой позицией движущейся части, чтобы управлять механизмом изменения высоты подъема, и механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема; и узел оценки, который оценивает то, отличается ли определенная позиция движущейся части от позиции движущейся части, которая должна быть определена. Контроллер запрещает согласованное управление в течение периода времени, когда оценено то, что определенная позиция движущейся части отличается от позиции движущейся части, которая должна быть определена.
Пятый аспект настоящего изобретения относится к способу управления для двигателя внутреннего сгорания, имеющего механизм изменения фаз газораспределения для изменения фаз газораспределения впускного клапана и механизм изменения высоты подъема для изменения максимального значения подъема и времени подъема впускного клапана посредством смещения движущейся части. Способ включает в себя этапы: определения позиции движущейся части; оценки того, существует ли несоответствие между определенной позицией движущейся части и фактической позицией движущейся части; когда смещение оценено как существующее, запрещения совместного управления, при котором движущаяся часть перемещается таким образом, что позиция движущейся части становится целевой позицией, чтобы управлять механизмом изменения высоты подъема, и механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема; и управления механизмом изменения фаз газораспределения на основе нагрузки двигателя в течение периода времени, когда совместное управление запрещено.
Шестой аспект настоящего изобретения относится к способу управления для двигателя внутреннего сгорания, имеющего механизм изменения подъема для изменения максимального значения подъема и времени подъема впускного клапана посредством смещения движущейся части и имеющего функциональное устройство для инструктирования перемещения движущейся части. Способ включает в себя этапы: определения позиции движущейся части; оценки того, отличается ли определенная позиция движущейся части от позиции движущейся части, которая должна быть определена; запрещения согласованного управления, при котором движущаяся часть перемещается таким образом, что позиция движущейся части становится целевой позицией, чтобы управлять механизмом изменения высоты подъема, механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема, когда оценено то, что определенная позиция движущейся части отличается от позиции движущейся части, которая должна быть определена; и управления механизмом изменения фаз газораспределения на основе нагрузки двигателя в течение периода времени, когда совместное управление запрещено.
Согласно основному объекту настоящего изобретения создано устройство управления для двигателя внутреннего сгорания, содержащее: дроссельный клапан, который регулирует объем всасываемого воздуха, представляющий собой объем воздуха, проходящего через путь впуска воздуха; механизм изменения фаз газораспределения для изменения фазы газораспределения впускного клапана; механизм изменения высоты подъема для изменения максимального значения подъема и времени подъема впускного клапана на основании смещения движущейся части; средство определения позиции для задания базовой позиции на основе позиции ограничения перемещения, в которой максимальное значение подъема и время подъема становятся наибольшими, и для определения позиции движущейся части на основе суммарного перемещения движущейся части от базовой позиции; и средство управления для выполнения согласованного управления, при котором целевая позиция движущейся части задается на основе запрашиваемого объема всасываемого воздуха, причем движущаяся часть перемещается таким образом, что позиция движущейся части, определяемая средством определения позиции, становится целевой позицией, чтобы управлять механизмом изменения высоты подъема, и механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема, при этом устройство управления содержит: средство оценки отклонения для оценивания того, возникло ли мгновенное прерывание подачи электропитания в средство определения позиции, и средство распознавания для осуществления распознавания максимальной позиции, чтобы корректировать суммарное перемещение посредством перемещения движущейся части таким образом, что максимальное значение подъема и время подъема увеличиваются, и распознавания позиции остановки движущейся части как позиции ограничения перемещения; при этом, когда средство оценки отклонения оценивает, что возникло мгновенное прерывание подачи электропитания, и позиция движущейся части определена ошибочно, средство управления запрещает согласованное управление и управляет механизмом изменения фаз газораспределения на основе нагрузки двигателя, а также регулирует объем всасываемого воздуха с использованием дроссельного клапана и увеличивает скорость вращения на холостом ходу до значения выше скорости вращения на холостом ходу в ходе нормального режима эксплуатации, когда средство распознавания осуществляет распознавание максимальной позиции.
Предпочтительно, когда средство оценки отклонения оценивает, что возникло мгновенное прерывание подачи электропитания, и позиция движущейся части определена ошибочно, средство управления управляет механизмом изменения фаз газораспределения так, чтобы задавать фазы газораспределения впускного клапана больше в сторону задержки по мере того, как нагрузка двигателя понижается, и задавать фазы газораспределения впускного клапана больше в сторону опережения по мере того, как нагрузка двигателя увеличивается.
Преимущественно средство управления изменяет максимальное значение подъема и время подъема впускного клапана посредством перемещения движущейся части в пределах заданного диапазона регулирования, устанавливаемого в пределах диапазона, более узкого, чем диапазон перемещения движущейся части.
Вышеприведенные и дополнительные цели, признаки и преимущества изобретения должны стать очевидными из последующего описания примерных вариантов осуществления со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции используются для обозначения одинаковых элементов.
Фиг.1 является схематическим чертежом, показывающим упрощенную структуру двигателя внутреннего сгорания согласно конкретному варианту осуществления настоящего изобретения.
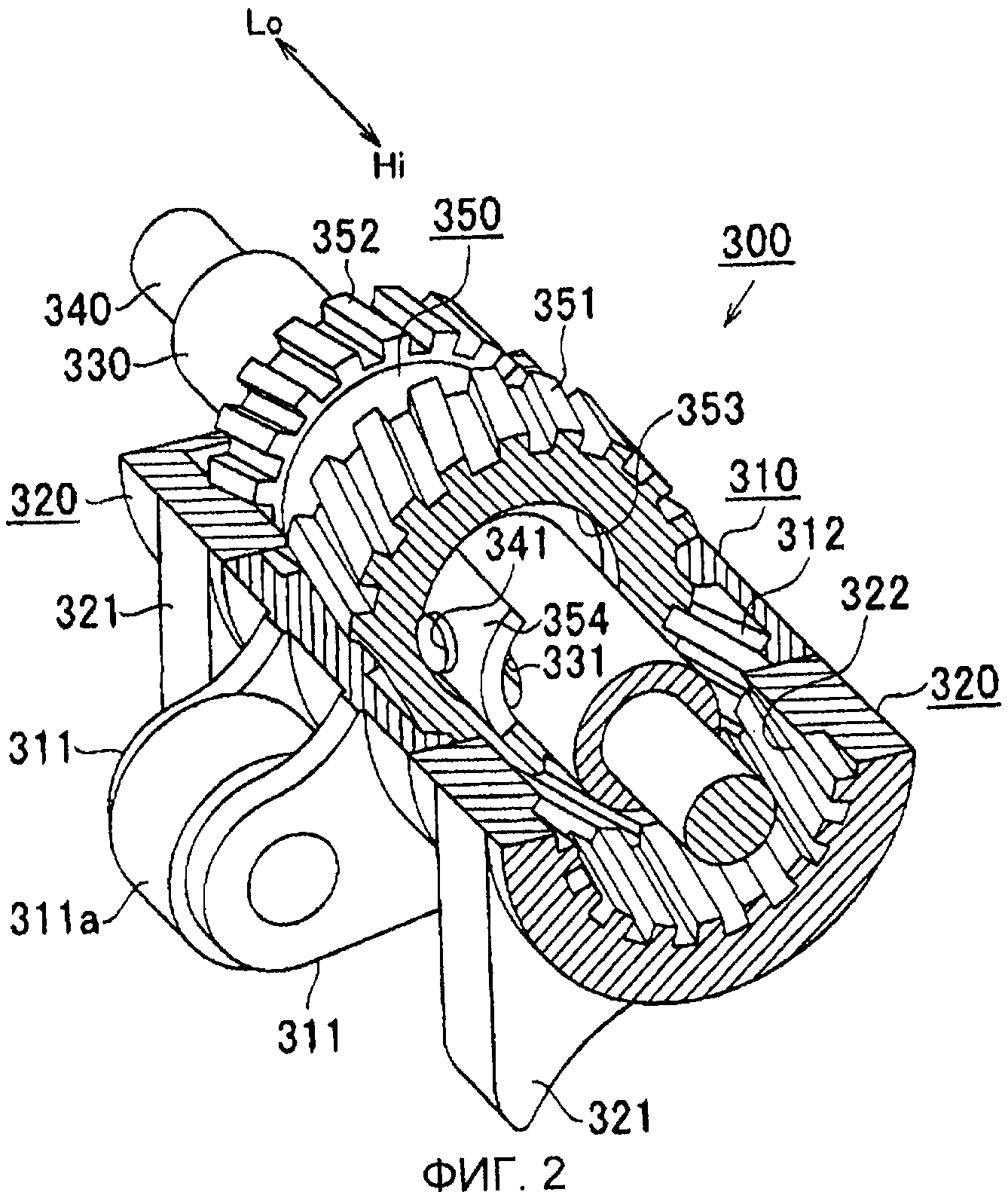
Фиг.2 является видом в перспективе в разрезе механизма изменения высоты подъема согласно этому же варианту осуществления.
Фиг.3 является графиком, показывающим режим изменения времени открытия клапана и времени закрытия клапана вследствие изменения высоты подъема впускного клапана.
Фиг.4 является графиком, показывающим режим изменения высоты подъема впускного клапана согласно согласованному управлению механизма изменения высоты подъема и механизма изменения фаз газораспределения.
Фиг.5 является схематическим чертежом, показывающим упрощенную структуру привода и электронного устройства управления механизма изменения высоты подъема согласно этому же варианту осуществления.
Фиг.6 является временной диаграммой, показывающей выходной сигнал датчика позиции и режим перехода значения числа определений позиции и значения числа ходов по мере того, как бесщеточный двигатель вращается.
Фиг.7 является таблицей, показывающей зависимость между увеличением снижения значения числа определений позиции и выходным сигналом датчика позиции согласно этому же варианту осуществления.
Фиг.8А-8С являются пояснительными чертежами, показывающими зависимость между позицией вала управления и значением числа ходов.
Фиг.9 является блок-схемой последовательности операций способа, показывающей последовательность обработки, которая сопровождает управление механизмом изменения высоты подъема согласно этому же варианту осуществления.
Фиг.10 является блок-схемой последовательности операций способа, показывающей последовательность обработки, которая сопровождает управление механизмом изменения фаз газораспределения согласно этому же варианту осуществления.
Фиг.11 является графиком, показывающим режим изменения позиции вала управления и фазы впускного кулачка вследствие согласованного управления согласно этому же варианту осуществления.
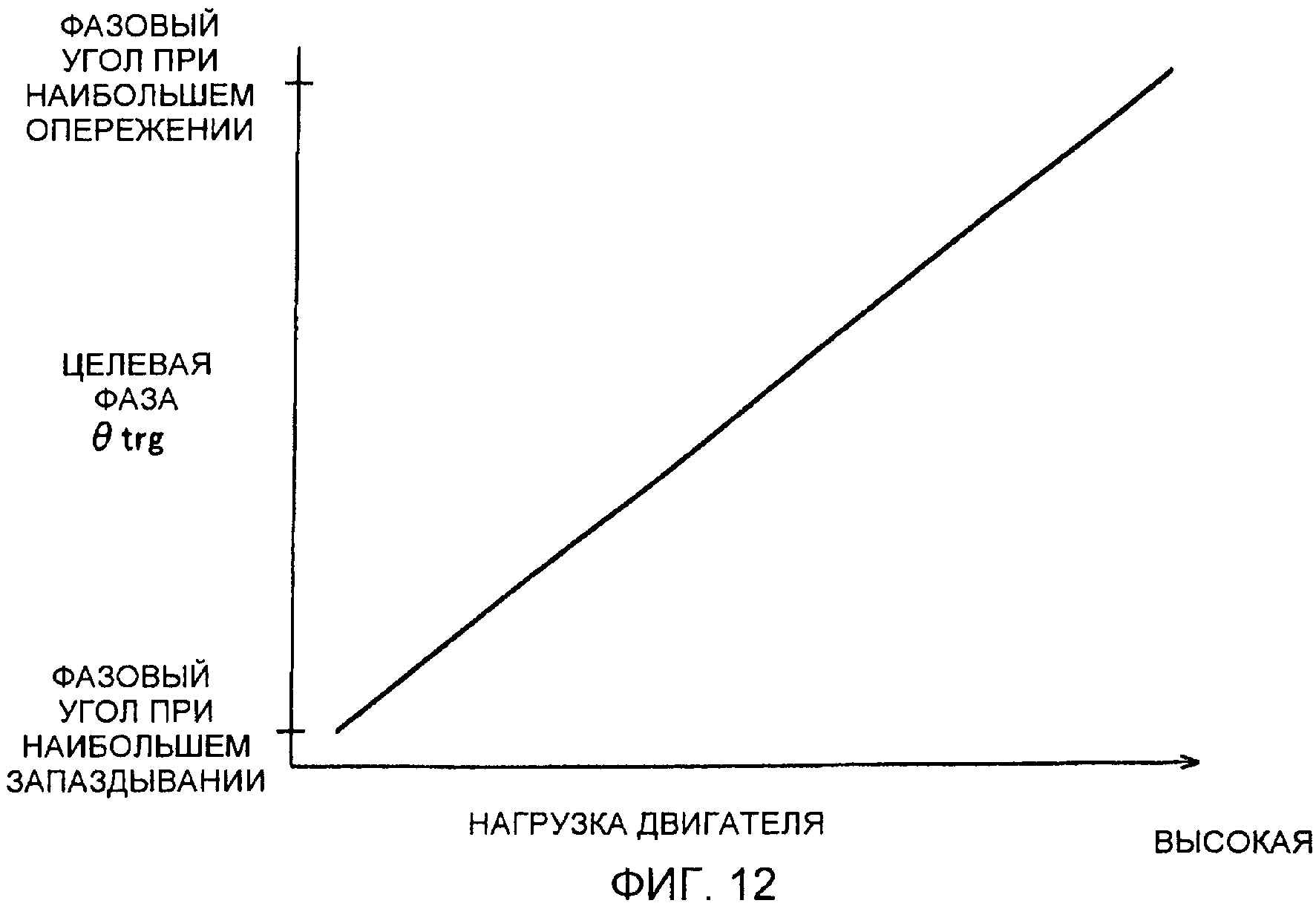
Фиг.12 является графиком, показывающим зависимость между нагрузкой двигателя и целевой фазой впускного кулачка вследствие запрещения согласованного управления согласно этому же варианту осуществления.
Фиг.13 является временной диаграммой, показывающей режим изменения фазы впускного кулачка и значения числа ходов вследствие запрещения согласованного управления согласно этому же варианту осуществления.
Фиг.14А является графиком, показывающим конкретный пример характеристик клапана, для которых легко возникают пропуски зажигания.
Фиг.14В является графиком, показывающим конкретный пример характеристик клапана, для которых легко возникает детонация.
Конкретный вариант осуществления устройства управления двигателя внутреннего сгорания согласно этому изобретению поясняется ниже со ссылкой на фиг.1-14В. Фиг.1 является схематическим чертежом, показывающим упрощенную конструкцию двигателя внутреннего сгорания, использующего устройство управления.
Этот двигатель 1 внутреннего сгорания, как показано на фиг.1, имеет конструкцию, которая объединяет блок 10 цилиндров и головку 20 блока цилиндров. В цилиндре 11, сформированном в блоке 10 цилиндров, содержится поршень 12, так что возможно скользящее движение. Этот поршень 12 соединен с коленчатым валом 15 посредством шатуна 16. Головка 20 блока цилиндров устанавливается и крепится к верхней части блока 10 цилиндров. Камера 13 сгорания образуется посредством внутренней периферийной поверхности цилиндра 11, нижней поверхностью головки 20 блока цилиндров и верхней поверхностью поршня 12.
В головке 20 блока цилиндров предусмотрена свеча 14 зажигания, выступающая в камеру 13 сгорания, и сформированы канал 21 впуска воздуха и выпускной канал 22, сообщающиеся с камерой 13 сгорания. Канал 21 впуска воздуха соединен с впускным коллектором (не показан на чертежах), чтобы являться частью пути 30 впуска воздуха. Дополнительно, выпускной канал 22 соединен с выпускным коллектором (не показан на чертежах) так, чтобы формировать часть пути 40 выпуска. Дроссельный клапан 33 для регулирования объема воздуха, вводимого в камеру 13 сгорания, и клапан 34 впрыска топлива для впрыскивания под давлением топлива в камеру 13 сгорания предоставляются в пути 30 впуска воздуха.
Впускной клапан 31, который соединяет и разъединяет путь 30 впуска воздуха и камеру 13 сгорания, и выпускной клапан 41, который соединяет и разъединяет путь 40 выпуска и камеру 13 сгорания, предусмотрены в головке 20 блока цилиндров, как показано на фиг.1. Клапан 31 и клапан 41 поджимаются посредством поджимающей силы соответствующей клапанной пружины (не показана на чертежах) в направлении закрытия клапана.
Дополнительно, внутри головки 20 блока цилиндров предусмотрены регуляторы 25 зазора, соответствующие клапану 31 и клапану 41 соответственно, и предусмотрено клапанное коромысло 26, охватывающее промежуток между регулятором 25 зазора и клапаном 31 и клапаном 41. Как показано на фиг.1, клапанное коромысло 26 поддерживается на одном своем конце посредством регулятора 25 зазора, а другой конец контактирует с частью конца стержня клапана 31 и клапана 41.
Кроме того, выпускной распределительный вал 42, управляющий клапаном 41, и впускной распределительный вал 32, управляющий клапаном 31, поддерживаются с возможностью вращения посредством головки 20 блока цилиндров. Впускной распределительный вал 32 и выпускной распределительный вал 42 соединены с коленчатым валом 15 посредством цепи механизма газораспределения (не показана на чертежах) таким образом, что каждый вал вращается два раза на одно вращение коленчатого вала 15. Дополнительно, впускной распределительный вал 32 оснащен механизмом 200 изменения фаз газораспределения для изменения фаз газораспределения впускного клапана 31 посредством изменения относительной фазы вращения впускного распределительного вала 32 относительно коленчатого вала 15.
Впускной кулачок 32а сформирован на впускном распределительном валу 32, а выпускной кулачок 42а сформирован на выпускном распределительном валу 42. Внешняя периферийная поверхность выпускного кулачка 42а контактирует с клапанным коромыслом 26, которое контактирует с выпускным клапаном 41. Таким образом, когда выпускной распределительный вал 42 вращается в ходе работы двигателя, вследствие работы выпускного кулачка 42а, клапанное коромысло 26 качается так, что часть, поддерживаемая посредством регулятора 25 зазора, выступает в качестве точки опоры. Это приводит к подъему выпускного клапана 41 посредством клапанного коромысла 26 в направлении открытия клапана.
Тем не менее механизм 300 изменения высоты подъема предусмотрен между впускным кулачком 32а и клапанным коромыслом 26, которое контактирует с впускным клапаном 31. Механизм 300 изменения высоты подъема имеет входной рычаг 311 и выходной рычаг 321. Входной рычаг 311 и выходной рычаг 321 поддерживаются так, чтобы иметь возможность качаться вокруг опорной трубы 330, прикрепленной к головке 20 блока цилиндров. Клапанное коромысло 26 поджимается к стороне выходного рычага 321 посредством поджимающей силы клапанной пружины и контактирует с внешней периферийной поверхностью выходного рычага 321. Таким образом, механизм 300 изменения высоты подъема поджимается в направлении W1 против часовой стрелки, как показано на фиг.1, и ролик 311а, предусмотренный на конце входного рычага 311, прижимается к внешней периферийной поверхности впускного кулачка 32а. Следовательно, когда впускной кулачок 32а вращается в ходе работы двигателя, вследствие работы впускного кулачка 32а, механизм 300 изменения высоты подъема качается вокруг опорной трубы 330. Затем, вследствие работы выходного рычага 321, клапанное коромысло 26 качается так, что часть, поддерживаемая посредством регулятора 25 зазора, выступает в качестве опоры. Это приводит к подъему впускного клапана 31 посредством клапанного коромысла 26 в направлении открытия клапана.
Конструкция механизма 300 изменения высоты подъема поясняется подробно ниже со ссылкой на фиг.2. Фиг.2 является видом в перспективе в разрезе, показывающим внутреннюю структуру механизма 300 изменения высоты подъема. Внутри опорной трубы 330, прикрепленной к головке 20 блока цилиндров, как показано на фиг.2, вставлен вал 340 управления так, чтобы иметь возможность перемещаться в осевом направлении. Кроме того, цилиндрический ползун 350 помещается за пределами опорной трубы 330 так, чтобы иметь возможность перемещаться в осевом направлении.
На внутренней стенке цилиндрического ползуна 350 сформирована канавка 353, которая проходит вдоль направления вдоль окружности, и втулка 354 зацепляется с этой канавкой 353. Продолговатое отверстие 331 сформировано в стенке опорной трубы 330 и проходит в ее осевом направлении. Между ползуном 350 и валом 340 управления предусмотрен стопорящий штифт 341 для соединения ползуна 350 и вала 340 управления через продолговатое отверстие 331. Один конец стопорящего штифта 341 вставляется в вогнутую часть (не показана на чертежах), сформированную в вале 340 управления, а другой конец стопорящего штифта 341 вставляется в сквозное отверстие, сформированное во втулке 354. Посредством этого ползун 350 свободно качается в направлении вдоль своей окружности с центром на опорной трубе 330 и валу 340 управления и может перемещаться в своем осевом направлении в ответ на смещение в осевом направлении вала 340 управления.
На внешней периферийной поверхности цилиндра 350 сформированы винтовые шлицы 351 в центральной части, и винтовые шлицы 352 сформированы по обе стороны винтовых шлицев 351 таким образом, что гребни зубцов наклонены в противоположные стороны.
Как показано на фиг.2, пара выходных частей 320 помещается за пределами ползуна 350 и размещена таким образом, чтобы заключать между собой входную часть 310. Винтовые шлицы 312 сформированы на внутренней периферийной поверхности входной части 310, и винтовые шлицы 312 зацепляются с винтовыми шлицами 351 ползуна 350. Пара входных рычагов 311 сформирована на внешней периферийной поверхности входной части 310 и выступает в радиальном направлении вала 340 управления. Ролик 311а поддерживается с возможностью вращения между парой входных рычагов 311.
Винтовые шлицы 322 сформированы на внутренних периферийных поверхностях пары выходных частей 320, и каждый винтовой шлиц 322 зацепляется с соответствующим винтовым шлицем 352 ползуна 350. Соответствующий выходной рычаг 321, выступающий в радиальном направлении вала 340 управления, сформирован на внешней периферийной поверхности каждой из выходных частей 320.
Используя этот тип механизма 300 изменения высоты подъема, ползун 350 смещается в осевом направлении в ответ на смещение вала 340 управления вдоль осевого направления. Винтовые шлицы 351, сформированные на внешней периферийной поверхности ползуна 350, зацепляются с винтовыми шлицами 312, сформированными на внутренней периферийной поверхности входной части 310, и винтовые шлицы 352, сформированные на внешней периферийной поверхности ползуна 350, зацепляются с винтовыми шлицами 322, сформированными на внутренней периферийной поверхности выходной части 320. Таким образом, когда ползун 350 смещается в осевом направлении, входная часть 310 и выходная часть 320 вращаются во взаимно противоположных направлениях. Как результат, относительная разность фаз между входным рычагом 311 и выходным рычагом 321 изменяется, и максимальное значение подъема и время подъема (сокращаемые в дальнейшем как "высота подъема") впускного клапана 31 изменяются. В частности, когда вал 340 управления смещается в направлении вверх, указанном посредством стрелки на фиг.2, ползун 350 перемещается в направлении вверх вместе с валом 340 управления. Посредством этого относительная разность фаз между входным рычагом 311 и выходным рычагом 321 становится большой, и высота подъема впускного клапана 31 становится большой. Тем не менее, когда вал 340 управления смещается в направлении вниз, указанном посредством стрелки на фиг.2, ползун 350 перемещается в направлении вниз вместе с валом 340 управления, и, таким образом, относительная разность фаз между входным рычагом 311 и выходным рычагом 321 становится небольшой, и высота подъема впускного клапана 31 становится небольшой.
Различные типы датчиков для определения рабочих состояний двигателя и переключатели для определения операций водителя предусмотрены для двигателя 1 внутреннего сгорания, как показано на фиг.1. Например, датчик 71 акселератора, предусмотренный для педали 70 акселератора, определяет рабочую величину (рабочую величину АССР акселератора) педали 70 акселератора. Датчик 72 угла поворота коленчатого вала, предусмотренный около коленчатого вала 15, выводит импульсный сигнал для каждого приращения вращения указанного угла поворота коленчатого вала 15, и на основе этого сигнала вычисляется скорость NE вращения двигателя. Датчик 73 позиции дросселя определяет степень открытия (степень открытия дросселя) дроссельного клапана 33, предусмотренного в пути 30 впуска воздуха. Измеритель 74 воздушного потока, предусмотренный в пути 30 впуска воздуха, определяет объем GA всасываемого воздуха для всасываемого воздуха, вводимого в камеру 13 сгорания. Датчик 75 позиции кулачка, предусмотренный около впускного распределительного вала 32, выводит сигнал, соответствующий фазовому углу θ впускного кулачка 32а. Кроме того, переключатель 76 зажигания для определения запроса на работу двигателя водителем транспортного средства подвергается операции переключения водителем и выводит сигнал, соответствующий текущей позиции переключателя.
Электронный модуль 60 управления для выполнения различных типов регулирования двигателя 1 внутреннего сгорания соединен с этими различными типами датчиков и переключателей. Электронный модуль 60 управления принимает сигналы определения от этих различных типов датчиков и переключателей, выполняет различные типы обработки вычисления для управления двигателем и выводит функциональные сигналы в ответ на результаты этих вычислений в свечу 14 зажигания, клапан 34 впрыска топлива и т.п., чтобы предоставлять централизованное управление работой двигателя 1 внутреннего сгорания.
Кроме того, в двигателе 1 внутреннего сгорания по настоящему варианту осуществления дроссельный клапан 33, предусмотренный в пути 30 впуска воздуха, сохраняется в полностью открытом состоянии в ходе работы двигателя, и объем GA всасываемого воздуха регулируется посредством изменения высоты подъема впускного клапана 31 посредством механизма 300 изменения высоты подъема. На основе рабочей величины АССР акселератора, скорости вращения NE двигателя и т.п. электронный модуль 60 управления вычисляет запрашиваемую величину всасываемого воздуха и управляет механизмом 300 изменения высоты подъема на основе этой величины запрашиваемого объема всасываемого воздуха.
Тем не менее, когда высота подъема впускного клапана 31 изменяется посредством работы механизма 300 изменения высоты подъема, как показано на фиг.3, время IVO открытия клапана и время IVC закрытия клапана изменяются вместе с изменением высоты подъема впускного клапана 31. В частности, как указано посредством двойной штрихпунктирной линии на фиг.3, когда высота подъема впускного клапана 31 увеличивается, время подъема становится длительным, и это приводит к опережению времени IVO открытия клапана, а также к задержке времени IVC закрытия клапана. Это приводит к изменению перекрытия клапанов между впускным клапаном 31 и выпускным клапаном 41 согласно изменению высоты подъема.
Таким образом, согласно двигателю 1 внутреннего сгорания по настоящему варианту осуществления, посредством работы механизма 200 изменения фаз газораспределения в ответ на состояние управления механизма 300 изменения высоты подъема, изменение времени IVO открытия клапана вместе с изменением высоты подъема впускного клапана 31 подавляется. В частности, как показано на фиг.4, когда высота подъема впускного клапана 31 увеличивается, фазы газораспределения соответствующим образом задерживаются. Тем не менее, когда высота подъема уменьшается, фазы газораспределения соответствующим образом опережаются. Таким образом, изменение в перекрытии клапанов может подавляться, даже когда изменяется высота подъема.
Когда механизм 200 изменения фаз газораспределения таким образом управляется в ответ на состояние управления механизма 300 изменения высоты подъема, т.е. когда согласованное управление между механизмом 300 изменения высоты подъема и механизмом 200 изменения фаз газораспределения выполняется, возможно отменять изменение в перекрытии клапанов вместе с изменением высоты подъема впускного клапана 31 и точно управлять высотой подъема впускного клапана 31 и перекрытием клапанов в ответ на рабочее состояние двигателя.
Здесь точное определение состояния управления механизма 300 изменения высоты подъема требуется для того, чтобы регулировать перекрытие клапанов до требуемой величины и изменять высоту подъема впускного клапана 31 в ответ на рабочее состояние двигателя.
Согласно двигателю 1 внутреннего сгорания по настоящему варианту осуществления состояние управления механизма 300 изменения высоты подъема определяется на основе позиции вала 340 управления. Работа вала 340 управления и способ определения позиции вала 340 управления далее подробно поясняются со ссылкой на фиг.5-8.
Фиг.5 является схематическим чертежом, показывающим упрощенную структуру привода 50 для управления валом 340 управления и устройство управления привода 50. Как показано на фиг.5, в части базового конца (часть конца справа на фиг.5) вала 340 управления, бесщеточный двигатель 52 подключен через механизм 51 преобразования как привод 50. Вращательное движение бесщеточного двигателя 52 преобразуется в линейное движение в осевом направлении вала 340 управления посредством механизма 51 преобразования. Вал 340 управления смещается в осевом направлении, и механизм 300 изменения высоты подъема управляется через вращательное движение в пределах определенного диапазона угла поворота вышеупомянутого бесщеточного двигателя 52 (например, в пределах диапазона угла вращения в 10 вращений (0-3600°) бесщеточного двигателя 52).
Когда бесщеточный двигатель 52 вращается в обычном направлении, вал 340 управления перемещается в направлении вверх, указанном посредством стрелки на фиг.5, и относительная разность фаз между входным рычагом 311 и выходным рычагом 321 механизма 300 изменения высоты подъема становится большой. Перемещение вала 340 управления в направлении стрелки вверх ограничивается посредством стопора 343 на стороне верхнего ограничения, предусмотренного на валу 340 управления. Позиция контакта этого стопора 343 на стороне верхнего ограничения с частью головки 20 блока цилиндров является позицией ограничения перемещения (упоминаемой в дальнейшем как "верхнее ограничение"), где высота подъема впускного клапана 31 становится наибольшей.
Тем не менее, когда бесщеточный двигатель 52 вращается в противоположном направлении, вал 340 управления перемещается в направлении вниз, указанном посредством стрелки на фиг.5, и относительная разность фаз между входным рычагом 311 и выходным рычагом 321 становится небольшой. Перемещение вала 340 управления в направлении стрелки вниз ограничивается посредством стопора 342 на стороне нижнего ограничения, предусмотренного на валу 340 управления. Позиция контакта этого стопора 342 на стороне нижнего ограничения с частью головки 20 блока цилиндров является позицией ограничения перемещения (упоминаемой в дальнейшем как "нижнее ограничение"), где высота подъема впускного клапана 31 становится наименьшей.
Вал 340 управления перемещается в осевом направлении вала 340 управления таким образом, что высота подъема впускного клапана 31 изменяется согласно осевой позиции вала 340 управления. Осевая позиция вала 340 управления изменяется в ответ на угол поворота бесщеточного двигателя 52 в пределах вышеупомянутого заданного диапазона угла поворота.
Бесщеточный двигатель 52 оснащен двумя датчиками S1 и S2 позиции в качестве датчика 77 определения позиции для вывода сигнала на основе угла поворота для определения позиции вала 340 управления. Каждый из датчиков S1 и S2 позиции поочередно выводит импульсные сигналы (т.е. высокий уровень сигнала "Н" и низкий уровень сигнала "L"), как показано в верхней части фиг.6, в ответ на изменения магнитного потока многополюсного магнита с 48 полюсами, который вращается вместе с ротором бесщеточного двигателя 52 в ходе вращения бесщеточного двигателя 52. Фиг.6 является временной диаграммой, показывающей сигналы датчиков S1 и S2 позиции, которые сопровождают вращение бесщеточного двигателя 52, и показывающей режим перехода значения Р числа определений позиции и значения S числа ходов.
Дополнительно, импульсные сигналы от обоих из датчиков S1 и S2 позиции выводятся со взаимно смещенными фазами. В ходе обычного вращения нарастающий фронт и задний фронт импульсного сигнала от датчика S1 позиции возникают до нарастающего фронта и заднего фронта соответственно импульсного сигнала от датчика S2 позиции. Фронт импульсного сигнала, выводимого из одного из датчиков S1 и S2, формируется для каждых 7,5° вращения бесщеточного двигателя 52. Импульсный сигнал от одного из датчиков формируется смещенным по фазе на 3,75° вращения бесщеточного двигателя 52 относительно импульсного сигнала от другого датчика. Следовательно, интервал фронта импульсных сигналов от датчиков S1 и S2 позиции становится равным 3,75°.
Как показано на фиг.5, вышеупомянутые сигналы каждого из датчиков S1 и S2 позиции принимаются посредством вышеупомянутого электронного модуля 60 управления, который описан выше со ссылкой на фиг.1. На основе этих сигналов электронный модуль 60 управления управляет возбуждением бесщеточного двигателя 52. Электронный модуль 60 управления включает в себя центральный процессор (ЦП) 61, постоянное запоминающее устройство (ПЗУ) 62, оперативное запоминающее устройство (ОЗУ) 63, ЭСППЗУ 64, которое является энергонезависимым запоминающим устройством, допускающим перезапись данных в запоминающем устройстве.
Вышеописанным способом ЦП 61 выполняет различные типы обработки вычислений, таких как вычисления, необходимые для управления величиной впрыска топлива, управления моментом зажигания, управления фазами газораспределения через работу механизма 200 изменения фаз газораспределения, которые требуются для работы двигателя 1 внутреннего сгорания, а также для работы механизма 300 изменения высоты подъема (т.е. требуются для работы бесщеточного двигателя 52). В частности, на основе сигналов от датчиков S1 и S2 позиции позиция вала 340 управления определяется, целевая позиция вала 340 управления, соответствующая запрашиваемой величине всасываемого воздуха, вычисляется, и бесщеточный двигатель 52 управляется таким образом, что позиция вала 340 управления достигает целевой позиции. Различные типы управляющих программ и т.п. сохранены заранее в ПЗУ 62. ОЗУ 63 является энергозависимым запоминающим устройством, которое требует резервного аккумулятора для хранения данных запоминающего устройства, и это ОЗУ 63 используется в качестве временного хранилища результатов вычисления ЦП 61 и т.п. ЭСППЗУ 64 допускает электрическую перезапись данных в запоминающем устройстве, и это запоминающее устройство не требует резервного аккумулятора для того, чтобы хранить данные запоминающего устройства.
Способ определения осевой позиции вала 340 управления далее подробно поясняется по ссылкой на фиг.6 и 7. Фиг.7 является таблицей, показывающей зависимость между сигналами каждого из датчиков S1 и S2 позиции и увеличение или снижение значения Р числа определений позиции.
Как упомянуто ранее, верхняя часть фиг.6 показывает схему вывода импульсного сигнала, выводимого из датчиков S1 и S2 позиции соответственно, в ходе вращения бесщеточного двигателя 52. Нижняя часть фиг.6 показывает режим перехода значения Р числа определений позиции и значения S числа ходов, который сопровождает вращение бесщеточного двигателя 52. Значение Р числа определений позиции соответствует суммарному перемещению, которое указывает, какое изменение осевой позиции вала 340 управления произошло, т.е. насколько вал 340 управления переместился от базовой позиции с вращением бесщеточного двигателя 52 после того, как операция включения (IG ON) переключателя 76 зажигания выполнена во время пуска двигателя 1 внутреннего сгорания. Значение S числа ходов вычисляется на основе стандартного значения Sst, которое указывает базовую позицию и значение Р числа определений позиции, а значение S числа ходов указывает осевую позицию вала 340 управления. Стандартное значение Sst - это значение S числа ходов во время предыдущей остановки работы двигателя, и стандартное значение Sst охраняется в ЭСППЗУ 64 каждый раз, когда двигатель останавливается.
В ходе определения позиции вала 340 управления сначала, на основе схемы вывода импульсных сигналов от каждого из датчиков S1 и S2 позиции, значение Р числа определений позиции увеличивается или снижается для каждого фронта этих импульсных сигналов. В частности, как показано на фиг.7, согласно тому, возник нарастающий фронт или задний фронт импульсного сигнала от одного из датчиков S1 и S2 позиции, и согласно тому, является вывод из другого датчика высоким уровнем сигнала Н или низким уровнем сигнала L, +1 или -1 добавляется к значению Р числа определений позиции. На фиг.7 обозначение "↑" указывает нарастающий фронт импульсного сигнала, а обозначение "↓" указывает задний фронт импульсного сигнала. Значение Р числа определений позиции, полученное таким образом, является значением, которое подсчитывает фронты импульсных сигналов от каждого из датчиков S1 и S2 позиции.
Когда бесщеточный двигатель 52 вращается в обычном режиме, как показано на фиг.6, "1" добавляется к значению Р числа определений позиции для каждого фронта импульсных сигналов от датчиков S1 и S2 позиции. Когда бесщеточный двигатель 52 вращается в обратном направлении, "1" вычитается из значения Р числа определений позиции для каждого из вышеупомянутых фронтов. Поскольку значение Р числа определений позиции сохраняется в ОЗУ 63 электронного модуля 60 управления, как показано на фиг.6, когда переключатель 76 зажигания подвергается операции отключения (IG OFF), и подача электричества в ОЗУ 63 прекращается, значение Р числа определений позиции сбрасывается к "0".
Когда значение Р числа определений позиции вычисляется таким образом, ЦП 61 вычисляет значение S числа ходов на основе расчетного значения Р числа определений позиции и стандартного значения Sst, сохраненного в ЭСППЗУ 64. В частности, значение, получаемое посредством прибавления значения Р числа определений позиции к стандартному значению Sst, сохраненному заранее в ЭСППЗУ 64, вычисляется как новое значение S числа ходов. Посредством обновления значений S числа ходов таким образом позиция вала 340 управления определяется.
Таким образом, как показано на фиг.6, в ходе обычного вращения бесщеточного двигателя 52 значение S числа ходов увеличивается в соответствии с увеличением значения Р числа определений позиции. Тем не менее, в ходе обратного вращения бесщеточного двигателя 52, значение S числа ходов понижается в соответствии со снижением значения Р числа определений позиции.
Когда значение S числа ходов вычислено, электронный модуль 60 управления сравнивает значение S числа ходов с целевым значением Sp числа ходов как целевой позиции вала 340 управления. Затем управление вращением бесщеточного двигателя 52, т.е. функциональное управление механизма 300 изменения высоты подъема, выполняется так, чтобы значение S числа ходов соответствовало целевому значению Sp числа ходов.
Зависимость между фактической позицией вала 340 управления и значением S числа ходов, когда позиция вала 340 управления определена таким образом, далее подробно поясняется со ссылкой на фиг.8А-8С.
Фиг.8А-8С являются пояснительными чертежами, показывающими зависимость между фактической позицией вала 340 управления и значением S числа ходов, когда механизм 300 изменения высоты подъема управляется в диапазоне перемещения, соответствующем 10 вращениям (0-3600°) бесщеточного двигателя 52.
Как описано выше, в двигателе 1 внутреннего сгорания по настоящему варианту осуществления значение Р числа определений позиции и значение S числа ходов увеличиваются или снижаются на "1" для каждого вращения на 3,75° бесщеточного двигателя 52. Следовательно, когда значение S числа ходов, соответствующее нижнему ограничению, предполагается равным “0”, значение S числа ходов, соответствующее верхнему ограничению, становится равным "960". Последующее пояснение предоставляется для случая, рассматривающего базовую позицию (Sst=480) в качестве промежуточной позиции между нижним ограничением и верхним ограничением.
Например, когда вал 340 управления, показанный на фиг.8А, управляется к стороне верхнего ограничения на величину, соответствующую только двум вращениям (720°) бесщеточного двигателя 52, и перемещается в позицию, указанную посредством стрелки, далеко от базовой позиции, значение Р числа определений позиции становится равным "192", а значение S числа ходов становится равным "672". Таким образом, при условии, что расстояние от нижнего ограничения до верхнего ограничения равно "1", вал 340 управления определяется как находящийся в "672/960" в направлении верхнего ограничения (т.е. определяется как находящийся в позиции "7/10").
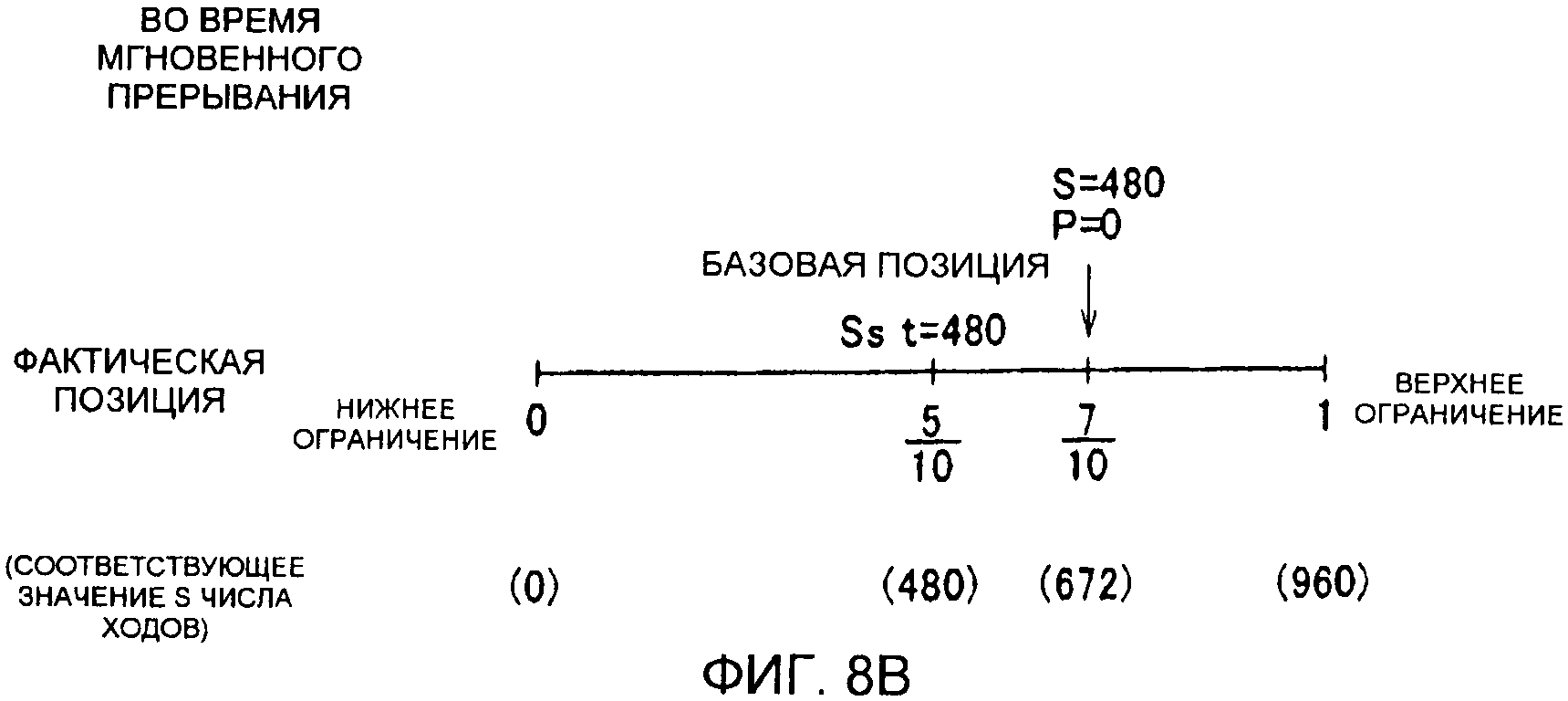
Тем не менее, когда мгновенное прерывание подачи электропитания (так называемое мгновенное прерывание) возникает вследствие неисправности подключения линии питания, подающей электроэнергию в электронный модуль 60 управления и т.п., имеются случаи, когда значение Р числа определений позиции, сохраненное в ОЗУ 63, теряется. Когда значение Р числа определений позиции теряется вследствие такого типа мгновенного прерывания, т.е. когда полученное в результате значение Р числа определений позиции становится первоначальным значением “0”, например, значение S числа ходов становится смещенным, т.е. позиция вала 340 управления, предполагаемая посредством электронного модуля 60 управления, становится смещенной от фактической позиции вала 340 управления.
В частности, когда значение Р числа определений позиции становится равным “0” вследствие мгновенного прерывания, несмотря на то, что фактическая позиция вала 340 управления в направлении верхнего ограничения составляет "7/10", как указано посредством стрелки на фиг.8 В, полученное в результате значение S числа ходов становится равным "480". Таким образом, электронный модуль 60 управления ложно распознает, что вал 340 управления находится в базовой позиции (т.е. в промежуточной позиции между нижним ограничением и верхним ограничением).
Когда позиция вала 340 управления ошибочно определяется таким образом, возникает несоответствие между высотой подъема впускного клапана 31, оцененной на основе ошибочно определенной позиции, и фактической высотой подъема впускного клапана 31.
Следовательно, когда согласованное управление механизма 200 изменения фаз газораспределения выполняется на основе состояния управления механизма 300 изменения высоты подъема, предполагаемого посредством электронного модуля 60 управления, фазы газораспределения, задаваемые посредством механизма 200 изменения фаз газораспределения, становятся неподходящими для рабочего режима двигателя. Как результат, рабочий режим двигателя становится нестабильным, и в некоторых случаях есть проблема в том, что это может вызывать возникновение пропусков зажигания, детонации и т.п.
В частности, если фазы газораспределения впускного клапана 31 смещаются в сторону опережения, когда высота подъема впускного клапана 31 является очень большой, как показано на фиг.14А, время IVO открытия впускного клапана 31 становится ранним, перекрытие клапанов становится чрезмерно большим, и величина внутренней EGR возрастает. Как результат, кислорода, подаваемого для сгорания, становится недостаточно, сгорание становится нестабильным, и легко возникают пропуски зажигания. Дополнительно, когда фазы газораспределения впускного клапана 31 смещаются в сторону запаздывания, когда высота подъема впускного клапана 31 является очень небольшой, как показано на фиг.14В, время IVO открытия впускного клапана 31 наступает в или после верхней мертвой точки, а время IVC закрытия клапана становится рядом с нижней мертвой точкой. Как результат, отрицательное давление в камере 13 сгорания возрастает во время открытия впускного клапана 31, расход воздуха, вводимого в камеру 13 сгорания, увеличивается, и впускной клапан 31 закрывается, чтобы начинать сжатие, рядом с нижней мертвой точкой. Таким образом, температура и давление в камере 13 сгорания легко возрастают, и легко возникает детонация.
Тем не менее, чтобы подавлять потерю значения Р числа определений позиции вследствие этого типа мгновенного прерывания, рассматривается приспосабливание конфигурации, в которой значение Р числа определений позиции сохраняется в ЭСППЗУ 64, которое не требует резервного аккумулятора для хранения данных запоминающего устройства. Тем не менее количество раз перезаписи данных в запоминающем устройстве на ЭСППЗУ 64 ограничено, и если ЭСППЗУ 64 используется для того, чтобы сохранять значение Р числа определений позиции, которое изменяется непрерывно в ходе работы вала 340 управления, долговечность ЭСППЗУ 64 заметно снижается, и, таким образом, приспосабливание этого типа конфигурации не представляется реальным.
Таким образом, для двигателя 1 внутреннего сгорания согласно настоящему варианту осуществления, посредством выполнения распознавания максимальной позиции нижеописанным способом, несоответствие между значением S числа ходов и фактической позицией вала 340 управления, вызываемое посредством потери значения Р числа определений позиции таким образом, корректируется.
Согласно распознаванию максимальной позиции, когда значение Р числа определений позиции теряется вследствие мгновенного прерывания, вал 340 управления смещается в направлении стороны верхнего ограничения посредством постоянной воздействующей силы, как указано посредством пунктирной стрелки на фиг.8С. В это время высота подъема впускного клапана 31 постепенно возрастает, и, как следствие, происходит сдвиг к дроссельному регулированию, при котором объем GA всасываемого воздуха регулируется посредством дроссельного клапана 33, предусмотренного на пути 30 впуска воздуха, так чтобы чрезмерное увеличение объема GA всасываемого воздуха, сопровождающее увеличение высоты подъема, подавлялось. Затем позиция, в которой стопор 343 на стороне верхнего ограничения контактирует с головкой 20 блока цилиндров и перемещение вала 340 управления прекращается, распознается как верхнее ограничение. Например, значение Р числа определений позиции задается равным "480" таким образом, что значение S числа ходов в этой позиции становится равным "960".
Посредством выполнения распознавания максимальной позиции, при котором вал 340 управления управляется в направлении стороны верхнего ограничения и позиция остановки распознается как верхнее ограничение, может быть исключено несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления.
Кроме того, когда несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое в двигателе 1 внутреннего сгорания по настоящему варианту осуществления (в течение периода времени, когда несоответствие оценено как большое, т.е. в течение периода времени, когда оценено, что определенная позиция движущейся части отличается от позиции движущейся части, которая должна быть определена), запрещается согласованное управление механизма 300 изменения высоты подъема и механизма 200 изменения фаз газораспределения.
Режим управления механизма 200 изменения фаз газораспределения и режим управления механизма 300 изменения высоты подъема для распознавания максимальной позиции и запрещения согласованного управления поясняются со ссылкой на фиг.9 и 10.
Сначала поясняется управление механизмом 300 изменения высоты подъема с помощью распознавания максимальной позиции со ссылкой на фиг.9. Фиг.9 является блок-схемой последовательности операций способа, показывающей последовательность распознавания согласно этому управлению. Это распознавание выполняется многократно посредством электронного модуля 60 управления в ходе работы двигателя.
Когда распознавание начинается, сначала на этапе S100, выполняется определение в отношении того, является ли это первым циклом управления после того, как подача электроэнергии в электронный модуль 60 управления начата. Если определено на этапе S100 то, что это первый цикл управления после того, как подача электроэнергии в электронный модуль 60 управления начата (ДА на этапе S100), распознавание переходит к этапу S110, и выполняется определение в отношении того, активирован ли флаг Fdrv приведения. Флаг Fdrv приведения активируется во время запуска двигателя и деактивируется, когда работа двигателя прекращается, и это значение сохраняется в ЭСППЗУ 64, которое не требует резервного аккумулятора для хранения данных запоминающего устройства. Кроме того, электроэнергия подается в электронный модуль 60 управления до запуска двигателя. Поэтому на этапе S110, когда флаг Fdrv приведения активирован, оценивается то, что подача электроэнергии в электронный модуль 60 управления перезапущена без выполнения обычного завершения работы двигателя (т.е. что подача электроэнергии перезапущена после возникновения мгновенного прерывания).
Если определено, что флаг Fdrv приведения активирован, на этапе S110 (ДА на этапе S110 (т.е. определено то, что мгновенное прерывание произошло сразу перед этим)), распознавание переходит к этапу S120, и флаг Fsd определения мгновенного прерывания активируется. Флаг определения мгновенного прерывания активируется, когда определено то, что мгновенное прерывание произошло вышеописанным способом, и флаг определения мгновенного прерывания деактивируется, когда вышеописанное распознавание максимальной позиции завершено. Флаг Fsd определения мгновенного прерывания сохраняется в ОЗУ 63 и деактивирован в исходном состоянии (т.е. во время запуска двигателя). Когда флаг Fsd определения мгновенного прерывания активирован таким образом, распознавание переходит к этапу S130.
Тем не менее, если определено, что флаг Fdrv приведения деактивирован, на этапе S110 (НЕТ на этапе S110), оценивается то, что подача электричества начата в электрический модуль 60 управления после прохождения обычной остановки работы двигателя (т.е. не вследствие возникновения мгновенного прерывания), этап S120 игнорируется, и распознавание переходит к этапу S130.
Кроме того, если на этапе S100 выполнено определение в отношении того, что это не первый цикл управления после начала подачи электричества в электрический модуль 60 управления (НЕТ на этапе S100), этап S110 и этап S120 игнорируются, и распознавание переходит к этапу S130.
На этапе S130 выполняется определение в отношении того, активирован ли флаг Fsd определения мгновенного прерывания. Если определено, что флаг Fsd определения мгновенного прерывания деактивирован, на этапе S130 (НЕТ на этапе S130), мгновенного прерывания не было, и поэтому распознавание переходит к этапу S140, и скорость NEi вращения на холостом ходу задается равной стандартной скорости NEst вращения, которая является обычной скоростью вращения на холостом ходу.
Выполнение затем переходит к этапу S150, целевая позиция вала 340 управления задается на основе запрашиваемого объема всасываемого воздуха вышеописанным способом, и выполняется обычное управление, при котором высота подъема впускного клапана 31 изменяется посредством управления валом 340 управления. Когда управление валом 340 управления осуществлено, данное распознавание завершается.
Тем не менее, если определено, что флаг Fsd определения мгновенного прерывания активирован, на этапе S130 (ДА на этапе S130), оценивается то, что несоответствие возникло между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, на основе значения S числа ходов вследствие возникновения мгновенного прерывания, и несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценивается как большое. Выполнение затем переходит к этапу S145, скорость NEi вращения на холостом ходу задается равной значению, получаемому посредством прибавления конкретной величины к стандартной скорости NEst вращения, вышеупомянутое распознавание максимальной позиции выполняется на этапе S155, и распознавание завершается.
Посредством многократного выполнения распознавания таким образом, выполняется определение в отношении того, возникло ли мгновенное прерывание. Затем, на основе результата определения вышеописанным способом относительно того, возникло ли мгновенное прерывание, если несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое, выполняется распознавание максимальной позиции.
Управление механизмом 200 изменения фаз газораспределения для запрещения согласованного управления далее поясняется со ссылкой на фиг.10. Фиг.10 является блок-схемой последовательности операций способа, показывающей последовательность обработки для этого управления. Эта обработка многократно выполняется посредством электронного модуля 60 управления в ходе работы двигателя.
Когда эта обработка начинается, сначала на этапе S200, выполняется определение в отношении того, активирован ли флаг Fsd мгновенного прерывания. Если на этапе S200 определено, что флаг Fsd мгновенного прерывания деактивирован, оценивается то, что мгновенное прерывание не возникало, целевое перекрытие клапанов задается на основе нагрузки двигателя, вычисляемой на основе объема GA всасываемого воздуха и скорости NE вращения двигателя, и механизм 200 изменения фаз газораспределения подвергается согласованному управлению на основе состояния управления механизма 300 изменения высоты подъема. Другими словами, целевая фаза θtrg впускного кулачка 32а задается на основе нагрузки двигателя и значения S числа ходов. По сути, на основе позиции вала 340 управления, целевая фаза θtrg смещается больше в сторону запаздывания по мере того, как высота подъема впускного клапана 31 увеличивается, а целевая фаза θtrg смещается больше в сторону опережения по мере того, как высота подъема впускного клапана 31 уменьшается. Таким образом, изменение времени IVO открытия впускного клапана 31, сопровождающее изменение высоты подъема, компенсируется посредством изменения фазы 8 впускного кулачка 32а. Затем, вместе с этой компенсацией, целевая фаза θtrg смещается дополнительно в сторону опережения или в сторону запаздывания таким образом, что величина перекрытия клапанов является подходящей для рабочего состояния двигателя.
Когда целевая фаза θtrg для согласованного управления задана таким образом, выполнение переходит к этапу S220, механизм 200 изменения фаз газораспределения управляется таким образом, что фаза θ впускного кулачка 32а, определяемая посредством датчика 75 позиции кулачка, совпадает с целевой фазой θtrg, и обработка завершается.
Позиция вала 340 управления и фаза θ впускного кулачка 32а, подвергающиеся согласованному управлению таким образом, изменяются согласно кривой L, показанной на фиг.11. По сути, по мере того как нагрузка двигателя увеличивается, вал 340 управления управляется в направлении стороны верхнего ограничения, и фаза θ впускного кулачка 32а изменяется в направлении стороны задержки. Таким образом, высота подъема впускного клапана 31 становится большой, и объем GA всасываемого воздуха увеличивается. Тем не менее, по мере того как нагрузка двигателя уменьшается, вал 340 управления управляется в направлении стороны нижнего ограничения, и фаза θ впускного кулачка 32а изменяется в направлении стороны опережения. Посредством этого высота подъема впускного клапана 31 становится небольшой, и объем GA всасываемого воздуха снижается. Как показано на фиг.11, в двигателе 1 внутреннего сгорания по настоящему варианту осуществления диапазон регулирования, в пределах которого перемещается вал 340 управления, когда объем GA всасываемого воздуха регулируется, может задаваться меньшим диапазона перемещения вала 340 управления, ограниченного посредством верхнего ограничения и нижнего ограничения.
Тем не менее если определено, что флаг Fsd определения мгновенного прерывания активирован, на этапе S200 (НЕТ на этапе S200), то управление переходит к этапу S215, и целевая фаза θtrg задается на основе нагрузки двигателя вне зависимости от состояния управления механизма 300 изменения высоты подъема. В частности, электронный модуль 60 управления обращается к таблице, используемой для вычислений, которая сохраняется в ПЗУ 62 электронного модуля 60 управления, и задает целевую фазу θtrg. Как показано на фиг.12, эта таблица задана так, чтобы целевая фаза θtrg опережала другую в соотношении к нагрузке двигателя таким образом, что целевая фаза θtrg увеличивается по мере того, как нагрузка двигателя увеличивается, и целевая фаза θtrg уменьшается по мере того, как нагрузка двигателя уменьшается.
Когда целевая фаза θtrg задана на основе нагрузки двигателя таким образом, механизм 200 изменения фаз газораспределения управляется на этапе S220 таким образом, что фаза θ впускного клапана 31 совпадает с целевой фазой θtrg, и обработка завершается.
Посредством многократного выполнения обработки таким образом, выполняется определение в отношении того, возникло ли мгновенное прерывание, и затем, на основе результатов этого определения, запрещается согласованное управление, если несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое.
Операция, когда согласованное управление запрещено таким образом, далее поясняется со ссылкой на фиг.13. Фиг.13 является временной диаграммой, показывающей режим изменения фазы θ впускного кулачка 32а и значение S числа ходов, сопровождающие запрещение согласованного управления.
Как показано на фиг.13, до тех пор пока мгновенное прерывание не возникло (время t0-t1), т.е. когда значение S числа ходов равно значению, соответствующему фактической позиции вала 340 управления, согласованное управление выполняется, и фаза θ впускного кулачка 32а изменяется вместе с изменением значения S числа ходов.
Тем не менее, когда во время t1 возникает мгновенное прерывание, и значение Р числа определений позиции, сохраненное в ОЗУ 63, теряется, значение S числа ходов становится неопределенным, и флаг Fsd определения мгновенного прерывания активируется.
Когда флаг Fsd определения мгновенного прерывания активирован, и несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое, согласованное управление запрещается, и скорость NEi вращения на холостом ходу увеличивается на конкретную величину a.
Далее, распознавание максимальной позиции начинается во время t1, и вал 340 управления управляется в направлении стороны верхнего ограничения. В течение периода выполнения распознавания максимальной позиции таким образом (время t1-t3), объем GA всасываемого воздуха регулируется посредством дроссельного клапана 33, и фаза θ впускного кулачка 32а изменяется на основе нагрузки двигателя. Например, когда нагрузка двигателя является высокой, как указано посредством сплошной линии на фиг.13, фаза θ впускного кулачка 32а смещается в сторону опережения. Тем не менее, когда нагрузка двигателя является низкой, как указано посредством пунктирной линии на фиг.13, фаза θ впускного кулачка 32а смещается в сторону запаздывания.
Когда вал 340 управления контактирует с верхним ограничением и смещение прекращается во время t2, позиция вала 340 управления распознается как позиция, соответствующая верхнему ограничению, и значение S числа ходов корректируется (время t2-t3). Затем во время t3 распознавание максимальной позиции завершается, и когда значение S числа ходов становится равным значению, соответствующему фактической позиции вала 340 управления, флаг Fsd определения мгновенного прерывания деактивируется, запрещение согласованного управления отменяется, и скорость NEi вращения на холостом ходу задается равной стандартной скорости NEst вращения.
Затем во время t3 согласованное управление снова выполняется для управления механизмом 300 изменения высоты подъема и управления механизмом 200 изменения фаз газораспределения, и, следовательно, фаза θ впускного кулачка 32а изменяется вместе с изменением значения S числа ходов.
Нижеприведенные преимущества достигаются согласно настоящему варианту осуществления, поясненному выше.
(1) Когда нагрузка двигателя является низкой (т.е. когда объем воздуха, вводимый в камеру 13 сгорания, является небольшим во время такта впуска воздуха) вследствие нехватки кислорода в камере 13 сгорания, сгорание становится нестабильным, и легко возникают пропуски зажигания. Тем не менее, когда нагрузка двигателя является высокой (т.е. когда объем воздуха, вводимый в камеру 13 сгорания, является высоким во время такта впуска воздуха), температура и давление в камере 13 сгорания легко увеличиваются во время хода сжатия, и поэтому легко возникает детонация. Таким образом, согласно вышеописанному варианту осуществления, на основе определения относительно того, возникло ли мгновенное прерывание, когда несоответствие между фактической высотой подъема и высотой подъема впускного клапана 31, предполагаемой посредством электронного модуля 60 управления, оценено как большое, согласованное управление запрещается, и работа механизма 200 изменения фаз газораспределения выполняется на основе нагрузки двигателя. По этой причине задание фаз газораспределения на основе неточного состояния управления механизма 300 изменения высоты подъема исключается, фазы газораспределения могут быть изменены так, чтобы подавлять возникновение пропусков зажигания, когда нагрузка двигателя является низкой, и фазы газораспределения могут быть изменены так, чтобы подавлять возникновение детонации, когда нагрузка двигателя является высокой. Как результат, даже когда электронный модуль 60 управления стал неспособным точно понимать высоту подъема впускного клапана 31, можно подавлять возникновение пропусков зажигания и детонацию.
(2) Когда фазы газораспределения впускного клапана 31 смещаются в сторону опережения в то время, когда высота подъема впускного клапана 31 является чрезвычайно высокой, перекрытие клапанов является чрезмерно большим, кислорода, подаваемого для сгорания, становится недостаточно, сгорание становится нестабильным, и легко возникают пропуски зажигания. Тем не менее, когда фазы газораспределения впускного клапана 31 смещаются в сторону запаздывания в то время, когда высота подъема впускного клапана 31 является чрезвычайно низкой, время IVO открытия впускного клапана 31 наступает в или после верхней мертвой точки, и время IVC закрытия клапана наступает около нижней мертвой точки, так что повышение температуры и давления в камере 13 сгорания легко возникает, и легко возникает детонация. Таким образом, согласно вышеописанному варианту осуществления, когда несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое, фазы газораспределения впускного клапана 31 смещаются больше в сторону запаздывания по мере того, как нагрузка двигателя уменьшается, и фазы газораспределения впускного клапана 31 смещаются больше в сторону опережения по мере того, как нагрузка двигателя увеличивается. Вследствие этой конфигурации, когда нагрузка двигателя является низкой (т.е. когда легко возникают пропуски зажигания, хотя детонация имеет тенденцию не возникать), фазы газораспределения впускного клапана 31 смещаются в сторону запаздывания, и даже когда высота подъема впускного клапана 31 не может точно пониматься, можно исключать то, чтобы характеристики впускного клапана 31 задавались равными характеристикам клапана, при которых легко возникают пропуски зажигания, и возникновение пропусков зажигания может надлежащим образом подавляться. Кроме того, когда нагрузка двигателя является высокой (т.е. когда легко возникает детонация, хотя пропуски зажигания имеют тенденцию не возникать), фазы газораспределения впускного клапана 31 смещаются в сторону опережения, и даже когда высота подъема впускного клапана 31 не может точно пониматься, можно исключать то, чтобы характеристики впускного клапана 31 задавались равными характеристикам клапана, при которых легко возникает детонация, и возникновение детонации может надлежащим образом подавляться.
(3) Когда мгновенное прерывание возникает и несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое, распознавание максимальной позиции выполняется. По этой причине становится возможным исключать несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления. Кроме того, распознавание максимальной позиции выполняется посредством управления валом 340 управления таким образом, что высота подъема увеличивается в то время, когда объем GA всасываемого воздуха регулируется с использованием дроссельного клапана 33. Таким образом, можно сдерживать чрезмерное увеличение объема GA всасываемого воздуха вследствие операции дросселирования дроссельного клапана 33, и распознавание максимальной позиции может выполняться даже в ходе работы двигателя.
Дополнительно, когда объем GA всасываемого воздуха регулируется согласно дроссельному клапану 33, изменение выходной мощности двигателя возможно даже в ходе выполнения распознавания максимальной позиции посредством изменения степени открытия дроссельного клапана 33. Когда степень открытия дроссельного клапана 33 изменяется таким образом, соответствующие вероятности возникновения пропусков зажигания и детонации изменяются вследствие изменения нагрузки двигателя. Согласно конфигурации вышеописанного варианта осуществления, при которой фазы газораспределения изменяются на основе нагрузки двигателя, фазы газораспределения изменяются согласно вероятностям возникновения пропусков зажигания и детонации, которые сопровождают изменение нагрузки двигателя, и становится возможным надлежащим образом подавлять возникновение пропусков зажигания и детонацию.
(4) Когда высота подъема впускного клапана 31 изменяется посредством управления валом 340 управления по всему диапазону перемещения вала управления, ограниченного посредством стопора 342 на стороне нижнего ограничения и стопора 343 на стороне верхнего ограничения, удар происходит каждый раз, когда перемещение вала 340 управления прекращается посредством стопора 342 на стороне нижнего ограничения и стопора 343 на стороне верхнего ограничения, поскольку высота подъема изменена, и, таким образом, есть проблема в том, что это может вызывать снижение долговечности механизма 300 изменения высоты подъема. Следовательно, согласно вышеописанному варианту осуществления высота подъема изменяется посредством задания смещения вала 340 управления в указанном диапазоне регулирования, который задается равным диапазону, который уже диапазона перемещения. Согласно этой конфигурации можно не допускать возникновения удара, который возникает вследствие прекращения перемещения вала 340 управления посредством стопора 342 на стороне нижнего ограничения и стопора 343 на стороне верхнего ограничения, когда высота подъема изменена, и тем самым возможно повышение долговечности механизма 300 изменения высоты подъема.
(5) В период чрезвычайно низкой нагрузки, например при работе на холостом ходу, сгорание становится нестабильным, и легко возникают пропуски зажигания. По этой причине посредством увеличения скорости NEi вращения на холостом ходу согласно вышеописанному варианту осуществления можно стабилизировать сгорание и более надлежащим образом подавлять возникновение пропусков зажигания в режиме холостого хода. Кроме того, когда распознавание максимальной позиции выполняется вследствие работы вала 340 управления до верхнего ограничения, где высота подъема впускного клапана 31 становится наибольшей согласно выполнению распознавания максимальной позиции, перекрытие клапанов становится чрезмерно высоким, и это приводит к состоянию, где пропуски зажигания возникают особенно легко. Таким образом, посредством приспосабливания конфигурации, которая вызывает повышение скорости NEi вращения на холостом ходу согласно вышеописанному варианту осуществления, даже в ходе выполнения распознавания максимальной позиции, где пропуски зажигания возникают особенно легко, можно надлежащим образом подавлять возникновение пропусков зажигания.
Вышеописанный вариант осуществления может быть выполнен согласно нижеописанным аспектам посредством соответствующей модификации вышеописанного варианта осуществления. Выше описана конфигурация, в которой когда несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое, скорость NEi вращения на холостом ходу увеличивается на указанную величину а. Значение указанной величины а может изменяться надлежащим образом до тех пор, пока значение таково, что можно подавлять возникновение пропусков зажигания.
Дополнительно, даже когда конфигурация, которая вызывает повышение скорости NEi вращения на холостом ходу таким образом, не приспособлена, посредством приспосабливания конфигурации, которая, по меньшей мере, изменяет фазы газораспределения на основе нагрузки двигателя, подавление возникновения пропусков зажигания и детонации возможно, даже когда точное понимание высоты подъема впускного клапана 31 посредством электронного модуля 60 управления становится невозможным.
В вышеприведенном описании вышеописанного варианта осуществления показана конфигурация, которая запрещает согласованное управление и, обращаясь к таблице вычисления, которая задана так, что величина продвижения становится более высокой в отношении к нагрузке двигателя, как показано на фиг.12, целевая фаза θtrg смещается больше в сторону запаздывания по мере того, как нагрузка двигателя уменьшается, и целевая фаза θtrg смещается больше в сторону опережения по мере того, как нагрузка двигателя увеличивается. Напротив, режим задания целевой фазы θtrg относительно нагрузки двигателя может быть надлежащим образом изменен. Например, может быть приспособлена конфигурация, при которой фазы газораспределения впускного клапана 31 смещаются в сторону опережения, когда нагрузка двигателя становится выше или равной заданной нагрузке. Когда этот тип конфигурации приспособлен, в ходе высоких нагрузок, когда легко возникает детонация, по меньшей мере, возникновение детонации может подавляться посредством смещения фаз газораспределения в сторону опережения. Кроме того, может быть приспособлена конфигурация, при которой фазы газораспределения впускного клапана 31 смещаются в сторону запаздывания, когда нагрузка двигателя становится равной или меньше заданной нагрузки. Когда этот тип конфигурации приспособлен, при низких нагрузках, когда легко возникают пропуски зажигания, по меньшей мере, возникновение пропусков зажигания может подавляться посредством смещения фаз газораспределения в сторону запаздывания. Эти конфигурации также могут комбинироваться, и можно приспосабливать конфигурацию, в которой целевая фаза θtrg изменяется пошагово посредством смещения фаз газораспределения в сторону опережения, когда нагрузка двигателя больше или равна заданной нагрузке, а также смещения фаз газораспределения в сторону запаздывания, когда нагрузка двигателя меньше заданной нагрузки.
В вышеприведенном описании варианта осуществления описана конфигурация, в которой средство оценки отклонения оценивает то, является ли несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, большим, когда определено, что мгновенное прерывание возникало. Тем не менее конфигурация для оценки того, является ли несоответствие большим, с помощью средства оценки отклонения может быть изменена надлежащим образом. По существу, независимо от того, каков способ такой оценки, если приспособлена конфигурация, в которой запрещено согласованное управление, и механизм 200 изменения фаз газораспределения управляется на основе нагрузки двигателя, когда несоответствие оценено как большое, возможно подавление возникновения пропусков зажигания и детонации.
Помимо этого, в вышеприведенном варианте осуществления описана конфигурация, в которой выполняется распознавание максимальной позиции, когда несоответствие между фактической позицией вала 340 управления и позицией вала 340 управления, предполагаемой посредством электронного модуля 60 управления, оценено как большое. Тем не менее, даже когда двигатель внутреннего сгорания не выполняет такое распознавание, посредством приспосабливания конфигурации настоящего изобретения, в которой запрещено согласованное управление, и механизм 200 изменения фаз газораспределения управляется на основе нагрузки двигателя, когда несоответствие оценено как большое, по меньшей мере, возможно подавление возникновения пропусков зажигания и детонации. Также с другим аспектом, т.е. с двигателем внутреннего сгорания, который выполняет распознавание, при котором вал 340 управления управляется в направлении стороны нижнего ограничения, где высота подъема клапана 31 становится наименьшей, и позиция, в которой вал 340 управления останавливается, распознается как нижнее ограничение, подавление возникновения пропусков зажигания и детонации возможно посредством приспосабливания конфигурации, в которой запрещено согласованное управление, и механизм 200 изменения фаз газораспределения управляется на основе нагрузки двигателя.
Механизм 300 изменения высоты подъема, поясненный в вышеприведенном описании варианта осуществления, является одним примером механизма изменения высоты подъема, и изобретение также может применяться в случае другой конфигурации до тех пор, пока устройство управления двигателя внутреннего сгорания оснащено механизмом изменения высоты подъема для изменения высоты подъема впускного клапана 31 посредством задания смещения движущейся части и выполняет согласованное управление посредством управления механизмом изменения фаз газораспределения на основе состояния управления механизма изменения высоты подъема.
Кроме того, схема, в которой два датчика S1 и S2 позиции предусмотрены в качестве датчика 77 позиции и суммарное перемещение вала 340 управления вычисляется как значение S числа ходов на основе импульсных сигналов, выводимых из каждого из датчиков S1 и S2 позиции, чтобы оценивать состояние управления механизма изменения высоты подъема, является одним примером средства определения позиции, которое определяет позицию вала 340 управления на основе величины относительного смещения от базовой позиции, и, следовательно, эта схема может быть изменена надлежащим образом.
Реферат
Двигатель (1) внутреннего сгорания включает в себя механизм (200) изменения фаз газораспределения для изменения фазы впускного кулачка (32а) и механизм (300) изменения высоты подъема для изменения высоты подъема посредством задания смещения вала (340) управления. Электронный модуль (60) управления выполняет согласованное управление, при котором механизм (300) изменения высоты подъема управляется таким образом, что позиция вала (340) управления, которая определяется посредством датчика (77) определения позиции, становится целевой позицией, и механизм (200) изменения фаз газораспределения управляется согласно состоянию управления механизма (300) изменения высоты подъема. Когда несоответствие между фактической позицией вала (340) управления и его определенной позицией оценено как большое, согласованное управление запрещается, и механизм изменения фаз газораспределения управляется на основе нагрузки двигателя. Такое выполнение обеспечивает управление пропусками зажигания и детонацией 2 з.п. ф-лы, 14 ил.
Формула
дроссельный клапан, который регулирует объем всасываемого воздуха, представляющий собой объем воздуха, проходящего через путь впуска воздуха;
механизм изменения фаз газораспределения для изменения фазы газораспределения впускного клапана;
механизм изменения высоты подъема для изменения максимального значения подъема и времени подъема впускного клапана на основании смещения движущейся части;
средство определения позиции для задания базовой позиции на основе позиции ограничения перемещения, в которой максимальное значение подъема и время подъема становятся наибольшими, и для определения позиции движущейся части на основе суммарного перемещения движущейся части от базовой позиции; и
средство управления для выполнения согласованного управления, при котором целевая позиция движущейся части задается на основе запрашиваемого объема всасываемого воздуха, причем движущаяся часть перемещается таким образом, что позиция движущейся части, определяемая средством определения позиции, становится целевой позицией, чтобы управлять механизмом изменения высоты подъема, и механизм изменения фаз газораспределения управляется согласно состоянию управления механизма изменения высоты подъема, при этом устройство управления содержит:
средство оценки отклонения для оценивания того, возникло ли мгновенное прерывание подачи электропитания в средство определения позиции, и
средство распознавания для осуществления распознавания максимальной позиции, чтобы корректировать суммарное перемещение посредством перемещения движущейся части таким образом, что максимальное значение подъема и время подъема увеличиваются, и распознавания позиции остановки движущейся части как позиции ограничения перемещения;
при этом, когда средство оценки отклонения оценивает, что возникло мгновенное прерывание подачи электропитания, и позиция движущейся части определена ошибочно, средство управления запрещает согласованное управление и управляет механизмом изменения фаз газораспределения на основе нагрузки двигателя, а также регулирует объем всасываемого воздуха с использованием дроссельного клапана и увеличивает скорость вращения на холостом ходу до значения выше скорости вращения на холостом ходу в ходе нормального режима эксплуатации, когда средство распознавания осуществляет распознавание максимальной позиции.
Комментарии