Система управления оборудованием - RU2697659C1
Код документа: RU2697659C1
Чертежи
























Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе управления оборудованием.
Уровень техники
[0002] В оборудовании, которое представляет собой управляемый объект, управление с обратной связью выполняется таким образом, что выходной сигнал управления приближается к целевому значению. Тем не менее, при фактическом управлении, вследствие аппаратных или управляющих ограничений, зачастую имеются ограничения на значение выходного сигнала управления. При разработке системы управления с игнорированием таких ограничений, переходный отклик с большой вероятностью ухудшается, и управление зачастую становится нестабильным.
[0003] В качестве технологии для улучшения удовлетворения ограничений, известен "опорный регулятор" (например, PTL 1 и 2). Опорный регулятор рассматривает удовлетворение ограничений и корректирует предварительное целевое значение, вычисленное на основе предварительно определенных параметров оборудования, чтобы выводить целевое значение выходного сигнала управления. В частности, опорный регулятор выполняет поиск минимальных значений предварительно определенной объектной функции, чтобы за счет этого вычислять целевое значение.
[0004] PTL 1 описывает коррекцию предварительных целевых значений давления нагнетания и EGR-отношения в дизельном двигателе посредством опорного регулятора. В частности, градиентный метод используется для того, чтобы обновлять скорректированные целевые значения таким образом, что значение объектной функции становится меньшим, и в силу этого предварительные целевые значения корректируются.
Список библиографических ссылок
Патентные документы
[0005] PTL 1. Не прошедшая экспертизу патентная публикация (Япония) № 2017-101627
PTL 2. Не прошедшая экспертизу патентная публикация (Япония) № 2016-061188
Сущность изобретения
Техническая задача
[0006] Тем не менее, при использовании поиска минимальных значений объектной функции посредством градиентного метода, диапазон поиска состоит из всех действительных чисел, так что выполняется неэффективный поиск. Как результат, нагрузка по обработке опорного регулятора становится более высокой.
[0007] Дополнительно, если имеется один параметр, для которого задается целевое значение (например, любой из давления нагнетания или EGR-отношения), объектная функция J(w) становится нисходящей выступающей функцией, к примеру, как показано на фиг. 26. При использовании градиентного метода, во время обновления скорректированного целевого значения w, скорректированное целевое значение w перемещается посредством точно вычисленной величины наклона объектной функции J(w), умноженной на предварительно определенную константу.
[0008] Тем не менее, задание подходящей константы в соответствии с моделью управления является затруднительным. Если константа является большой, как показано на фиг. 26, при каждом обновлении скорректированного целевого значения w, направление перемещения скорректированного целевого значения w изменяется. По этой причине, число обновлений скорректированного целевого значения w, необходимое для того, чтобы заставлять скорректированное целевое значение w приближаться к оптимальному целевому значению wop, становится больше, и нагрузка по обработке опорного регулятора становится более высокой. С другой стороны, если константа является небольшой, как показано на фиг. 27, величина перемещения скорректированного целевого значения w, когда скорректированное целевое значение w обновляется, является небольшой. По этой причине, число обновлений скорректированного целевого значения w, необходимое для того, чтобы заставлять скорректированное целевое значение w приближаться к оптимальному целевому значению wop, становится больше, и нагрузка по обработке опорного регулятора становится более высокой.
[0009] Следовательно, с учетом вышеуказанной проблемы, задача настоящего изобретения заключается в том, чтобы снижать нагрузку по обработке опорного регулятора, когда опорный регулятор выполняет поиск минимальных значений объектной функции.
Решение задачи
[0010] Краткое изложение настоящего раскрытия сущности заключается в следующем.
[0011] (1) Система управления оборудованием, содержащая: контроллер с обратной связью, выполненный с возможностью определять входной сигнал управления оборудования таким образом, что один выходной сигнал управления оборудования приближается к целевому значению; часть вычисления предварительных целевых значений, выполненную с возможностью вычислять предварительное целевое значение на основе предварительно определенного параметра оборудования; и опорный регулятор, выполненный с возможностью выполнять поиск минимальных значений объектной функции посредством обновления скорректированного целевого значения, чтобы за счет этого выводить целевое значение из предварительного целевого значения, при этом объектная функция задается посредством следующей формулы (1) или формулы (2):
Математическое уравнение 1

Математическое уравнение 2

где r является предварительным целевым значением, w является скорректированным целевым значением, ρ является весовым коэффициентом, k является временным шагом, yk является будущим прогнозированным значением выходного сигнала управления на временном шаге k, yup является верхним предельным значением выходного сигнала управления, ylow является нижним предельным значением выходного сигнала управления, и N является числом шагов прогнозирования, и опорный регулятор выполнен с возможностью вычислять будущее прогнозированное значение выходного сигнала управления посредством следующей формулы (3):
yk+1=Ayk+Bw ... (3),
где A и B являются предварительно определенными константами, и опорный регулятор выполнен с возможностью обновлять скорректированное целевое значение только между r-0,5Rr и r, где Rr является значением частного дифференциала для скорректированного целевого значения w объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r.
[0012] (2) Система управления оборудованием, описанная в вышеприведенном (1), в которой опорный регулятор выполнен с возможностью обновлять скорректированное целевое значение посредством способа двоичного поиска.
[0013] (3) Система управления оборудованием, описанная в вышеприведенном (1), в которой опорный регулятор выполнен с возможностью задавать начальное значение w0 скорректированного целевого значения равным r-0,5Rr.
[0014] (4) Система управления оборудованием, описанная в вышеприведенном (3), в которой, если значение Rw0 частного дифференциала, когда скорректированное целевое значение w представляет собой начальное значение w0, является отрицательным, опорный регулятор выполнен с возможностью вычислять i-ое скорректированное целевое значение wi посредством следующей формулы (4):
wi=(Rwi-1r-Rrwi-1)/(Rwi-1-Rr) ... (4),
где Rwi-1 является значением частного дифференциала, когда скорректированное целевое значение w представляет собой (i-1)-ое скорректированное целевое значение wi-1, и i представляет собой целое число 1 или больше.
[0015] (5) Система управления оборудованием, описанная в вышеприведенном (3), в которой, если значение Rw0 частного дифференциала, когда скорректированное целевое значение w представляет собой начальное значение w0, является положительным, опорный регулятор выполнен с возможностью задавать первое скорректированное целевое значение w1 равным w0-0,5Rw0 и вычислять i-ое скорректированное целевое значение wi посредством следующей формулы (5):
wi=(Rwi-1w0-Rw0wi-1)/(Rwi-1-Rw0) ... (5),
где Rwi-1 является значением частного дифференциала, когда скорректированное целевое значение w представляет собой (i-1)-ое скорректированное целевое значение wi-1, и i представляет собой целое число 2 или больше.
[0016] (6) Система управления оборудованием, описанная в вышеприведенном (1), в которой опорный регулятор выполнен с возможностью задавать начальное значение w0 скорректированного целевого значения равным предварительно определенному значению между r-0,5Rr и r.
[0017] (7) Система управления оборудованием, описанная в вышеприведенном (6), в которой, если значение Rr частного дифференциала, когда скорректированное целевое значение w представляет собой предварительное целевое значение r, является положительным, и значение Rw0 частного дифференциала, когда скорректированное целевое значение w представляет собой начальное значение w0, является отрицательным, опорный регулятор выполнен с возможностью вычислять i-ое скорректированное целевое значение wi посредством следующей формулы (4):
wi=(Rwi-1r-Rrwi-1)/(Rwi-1-Rr) ... (4),
где Rwi-1 является значением частного дифференциала, когда скорректированное целевое значение w представляет собой (i-1)-ое скорректированное целевое значение wi-1, и i представляет собой целое число 1 или больше.
[0018] (8) Система управления оборудованием, описанная в вышеприведенном (6), в которой, если значение Rr частного дифференциала, когда скорректированное целевое значение w представляет собой предварительное целевое значение r, является положительным, и значение Rw0 частного дифференциала, когда скорректированное целевое значение w представляет собой начальное значение w0, является положительным, опорный регулятор выполнен с возможностью задавать первое скорректированное целевое значение w1 равным w0-0,5Rw0 и вычислять i-ое скорректированное целевое значение wi посредством следующей формулы (4):
wi=(Rwi-1r-Rrwi-1)/(Rwi-1-Rr) ... (4),
где Rwi-1 является значением частного дифференциала, когда скорректированное целевое значение w представляет собой (i-1)-ое скорректированное целевое значение wi-1, и i представляет собой целое число 2 или больше.
[0019] (9) Система управления оборудованием, описанная в вышеприведенном (6), в которой, если значение Rr частного дифференциала, когда скорректированное целевое значение w представляет собой предварительное целевое значение r, является отрицательным, и значение Rw0 частного дифференциала, когда скорректированное целевое значение w представляет собой начальное значение w0, является отрицательным, опорный регулятор выполнен с возможностью вычислять i-ое скорректированное целевое значение wi посредством следующей формулы (6):
wi=(Rwi-1wup-Rwupwi-1)/(Rwi-1-Rwup) ... (6),
где верхнее предельное значение wup диапазона поиска представляет собой r-0,5Rr, Rwup является значением частного дифференциала, когда скорректированное целевое значение w представляет собой верхнее предельное значение wup, Rwi-1 является значением частного дифференциала, когда скорректированное целевое значение w представляет собой (i-1)-ое скорректированное целевое значение wi-1, и i представляет собой целое число 1 или больше.
[0020] (10) Система управления оборудованием, описанная в вышеприведенном (6), в которой если значение Rr частного дифференциала, когда скорректированное целевое значение w представляет собой предварительное целевое значение r, является отрицательным, и значение Rw0 частного дифференциала, когда скорректированное целевое значение w представляет собой начальное значение w0, является положительным, опорный регулятор выполнен с возможностью задавать первое скорректированное целевое значение w1 равным w0-0,5Rw0 и вычислять i-ое скорректированное целевое значение wi посредством следующей формулы (6):
wi=(Rwi-1wup-Rwupwi-1)/(Rwi-1-Rwup) ... (6),
где верхнее предельное значение wup диапазона поиска представляет собой r-0,5Rr, Rwup является значением частного дифференциала, когда скорректированное целевое значение w представляет собой верхнее предельное значение wup, Rwi-1 является значением частного дифференциала, когда скорректированное целевое значение w представляет собой (i-1)-ое скорректированное целевое значение wi-1, и i представляет собой целое число 2 или больше.
Преимущества изобретения
[0021] Согласно настоящему изобретению, можно снижать нагрузку по обработке опорного регулятора, когда опорный регулятор выполняет поиск минимальных значений объектной функции.
Краткое описание чертежей
[0022] Фиг. 1 является видом, показывающим управляющую структуру для отслеживания целевых значений системы управления оборудованием согласно первому варианту осуществления.
Фиг. 2 является управляющей структурой с прямой связью, полученной посредством эквивалентной деформации управляющей структуры для отслеживания целевых значений по фиг. 1.
Фиг. 3 является графиком, схематично показывающим объектную функцию.
Фиг. 4 является графиком, показывающим первую функцию.
Фиг. 5 является графиком, показывающим частный дифференциал для будущего прогнозированного значения выходного сигнала управления первой функции.
Фиг. 6 является видом для пояснения способа обновления скорректированного целевого значения в первом варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 7 является видом для пояснения способа обновления скорректированного целевого значения в первом варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 8 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения в первом варианте осуществления.
Фиг. 9 является видом для пояснения способа обновления скорректированного целевого значения во втором варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 10 является видом для пояснения способа обновления скорректированного целевого значения во втором варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 11 является видом, показывающим подобие треугольников, используемых для обновления скорректированного целевого значения.
Фиг. 12 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения во втором варианте осуществления.
Фиг. 13 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения во втором варианте осуществления.
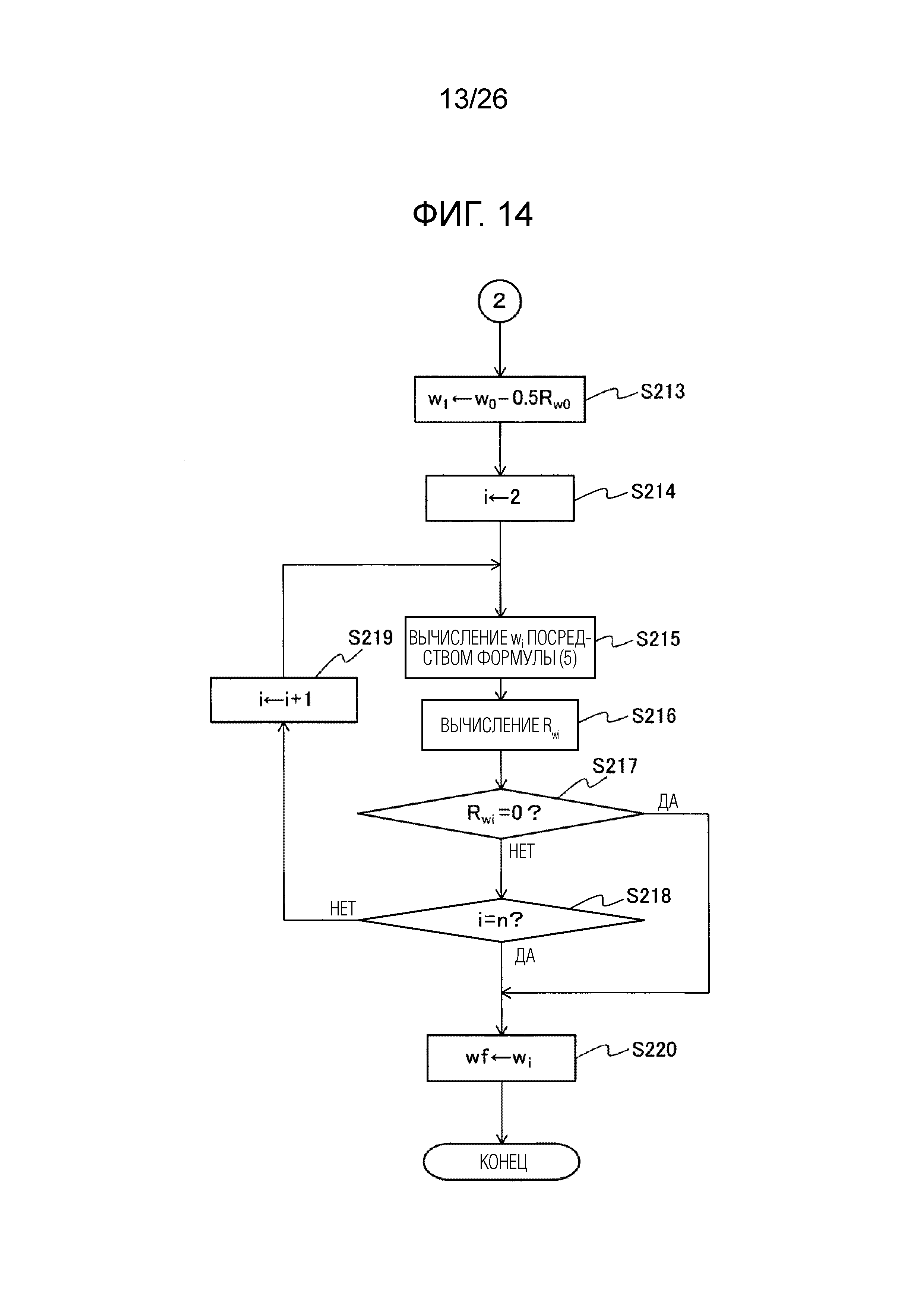
Фиг. 14 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения во втором варианте осуществления.
Фиг. 15 является видом для пояснения способа обновления скорректированного целевого значения в третьем варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 16 является видом для пояснения способа обновления скорректированного целевого значения в третьем варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
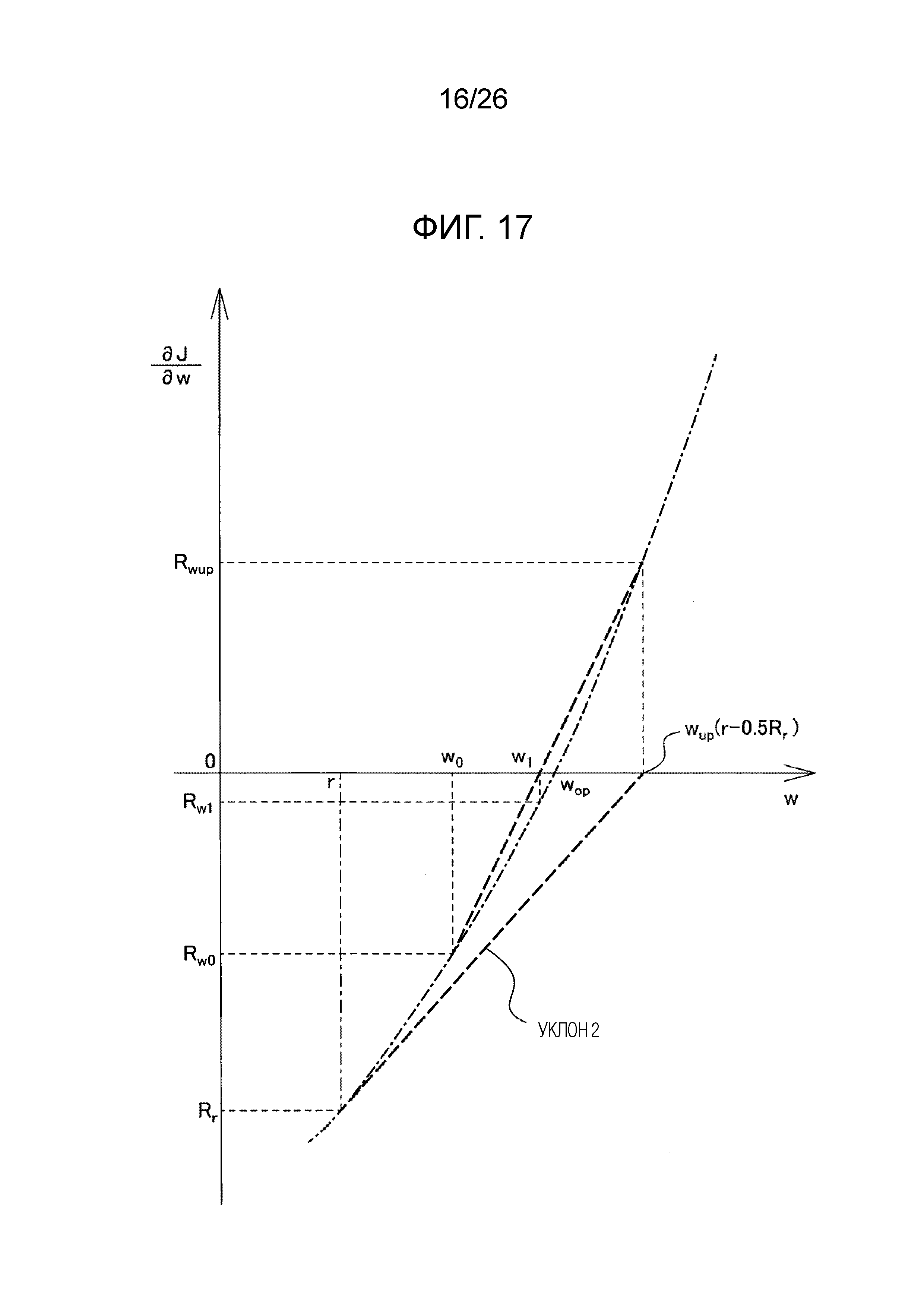
Фиг. 17 является видом для пояснения способа обновления скорректированного целевого значения в третьем варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 18 является видом для пояснения способа обновления скорректированного целевого значения в третьем варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 19 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения в третьем варианте осуществления.
Фиг. 20 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения в третьем варианте осуществления.
Фиг. 21 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения в третьем варианте осуществления.
Фиг. 22 является графиком, показывающим вторую функцию.
Фиг. 23 является графиком, показывающим частный дифференциал для будущего прогнозированного значения выходного сигнала управления второй функции.
Фиг. 24 является видом для пояснения способа обновления скорректированного целевого значения во втором варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции.
Фиг. 25 является видом, показывающим подобие треугольников, используемых для обновления скорректированного целевого значения.
Фиг. 26 является видом, показывающим поиск минимальных значений объектной функции в предшествующем уровне техники.
Фиг. 27 является видом, показывающим поиск минимальных значений объектной функции в предшествующем уровне техники.
Подробное описание вариантов осуществления
[0023] Ниже, со ссылкой на чертежи, подробнее поясняются варианты осуществления настоящего изобретения. Следует отметить, что в нижеприведенном пояснении, аналогичным компонентам назначаются идентичные ссылки с номерами.
[0024] Первый вариант осуществления
Во-первых, ссылаясь на фиг. 1-8, поясняется первый вариант осуществления настоящего изобретения.
[0025] Система управления оборудованием
Фиг. 1 является видом, показывающим управляющую структуру для отслеживания целевых значений системы управления оборудованием согласно первому варианту осуществления. Система управления оборудованием содержит часть 2 вычисления предварительных целевых значений, опорный регулятор 3 (RG), модуль 4 сравнения и контроллер 5 с обратной связью. Например, микропроцессор, такой как электронный модуль управления (ECU), функционирует в качестве системы управления оборудованием.
[0026] Часть, обведенная посредством пунктирной линии на фиг. 1, функционирует в качестве системы 10 с замкнутым контуром, выполняющей управление с обратной связью таким образом, что выходной сигнал y управления приближается к целевому значению wf. Если система 10 с замкнутым контуром разрабатывается, управляющая структура для отслеживания целевых значений по фиг. 1 эквивалентно модифицируется с возможностью получать управляющую структуру с прямой связью по фиг. 2. Следует отметить, что, также можно одновременно управлять множеством переменных состояния оборудования 6 посредством системы 10 с замкнутым контуром, но в настоящем варианте осуществления, имеется одна переменная состояния оборудования, управляемого посредством системы 10 с замкнутым контуром. Число выходного сигнала y управления также равно единице, и число целевого значения wf также равно единице.
[0027] Модуль 4 сравнения вычитает выходной сигнал y управления из целевого значения wf, чтобы вычислять разность e (=wf-y), и вводит разность e в контроллер 5 с обратной связью. Целевое значение wf вводится посредством опорного регулятора 3 в модуль 4 сравнения, тогда как выходной сигнал y управления выводится из оборудования 6, в которое вводятся входной сигнал u управления и экзогенный входной сигнал d. Экзогенный входной сигнал d представляет собой предварительно определенный параметр оборудования 6.
[0028] Контроллер 5 с обратной связью определяет входной сигнал u управления таким образом, что выходной сигнал y управления приближается к целевому значению wf. Таким образом, контроллер 5 с обратной связью определяет входной сигнал u управления таким образом, что разность e приближается к нулю. В контроллере 5 с обратной связью, используется PI-управление, PID-управление или другое известное управление. Контроллер 5 с обратной связью вводит входной сигнал u управления в оборудование 6. Дополнительно, выходной сигнал y управления вводится в контроллер 5 с обратной связью в качестве обратной связи по состоянию. Следует отметить, что ввод выходного сигнала y управления в контроллер 5 с обратной связью может опускаться. Дополнительно, модуль 4 сравнения может быть встроен в контроллер 5 с обратной связью.
[0029] Как пояснено выше, в системе 10 с замкнутым контуром, управление с обратной связью выполняется таким образом, что выходной сигнал y управления приближается к целевому значению wf. Тем не менее, при фактическом управлении, вследствие аппаратных или управляющих ограничений, зачастую имеются ограничения на значение выходного сигнала y управления. По этой причине, если целевое значение, вычисленное без учета таких ограничений, вводится в систему 10 с замкнутым контуром, выходной сигнал y управления может конфликтовать с ограничениями, в силу этого приводя к ухудшению характеристик переходного отклика и нестабильности управления.
[0030] Следовательно, в настоящем варианте осуществления, часть 2 вычисления предварительных целевых значений и опорный регулятор 3 используются для того, чтобы вычислять целевое значение wf выходного сигнала y управления. Если экзогенный входной сигнал d вводится в часть 2 вычисления предварительных целевых значений, часть 2 вычисления предварительных целевых значений вычисляет предварительное целевое значение r на основе экзогенного входного сигнала d и выводит предварительное целевое значение r в опорный регулятор 3. Часть 2 вычисления предварительных целевых значений, например, представляет собой карту целевых значений, посредством которой показана взаимосвязь между экзогенным входным сигналом d и предварительным целевым значением r.
[0031] Опорный регулятор 3 корректирует предварительное целевое значение r, чтобы вычислять целевое значение wf таким образом, что степень удовлетворения ограничивающего условия, связанного с выходным сигналом y управления, становится более высокой. В частности, опорный регулятор 3 выполняет поиск минимальных значений объектной функции посредством обновления скорректированного целевого значения w, чтобы за счет этого выводить целевое значение wf из предварительного целевого значения r.
[0032] Объектная функция определяется с учетом степени удовлетворения ограничивающего условия, связанного с выходным сигналом y управления. В настоящем варианте осуществления, выходной сигнал y управления имеет верхнее предельное значение yup. В этом случае, объектная функция J(w) задается посредством следующей формулы (1):
Математическое уравнение 3

Здесь, k является временным шагом, yk является будущим прогнозированным значением выходного сигнала y управления на временном шаге k, ρ является весовым коэффициентом, и N является числом шагов прогнозирования (горизонтом прогнозирования). Следует отметить, что весовой коэффициент ρ является предварительно определенным положительным значением.
[0033] Объектная функция J(w) включает в себя корректировочный член, показывающий величину коррекции целевого значения (первый член в правой стороне формулы (1)), и штрафную функцию, показывающую степень удовлетворения ограничивающего условия, связанного с выходным сигналом y управления (второй член в правой стороне формулы (1)). Корректировочный член является квадратом разности между предварительным целевым значением r и скорректированным целевым значением w. По этой причине, значение объектной функции J(w) становится тем меньшим, чем меньше разность между предварительным целевым значением r и скорректированным целевым значением w, то есть чем меньше величина коррекции целевого значения. Дополнительно, штрафная функция имеет такую конфигурацию, в которой когда будущее прогнозированное значение yk выходного сигнала y управления превышает верхнее предельное значение yup, разность между будущим прогнозированным значением yk и верхним предельным значением yup задается как штраф объектной функции J(w). По этой причине, значение объектной функции J(w) становится тем меньшим, чем меньше величина, на которую будущее прогнозированное значение yk выходного сигнала y управления превышает верхнее предельное значение yup.
[0034] Опорный регулятор 3 использует модель оборудования 6 для того, чтобы вычислять будущее прогнозированное значение yk выходного сигнала y управления посредством следующей формулы (3):
yk+1=Ayk+Bw ... (3)
Здесь, A и B являются предварительно определенными константами.
[0035] Во-первых, с использованием выходного сигнала y0 управления во время вычисления будущего прогнозированного значения, будущее прогнозированное значение y1 выходного сигнала y управления на один шаг вперед от времени вычисления вычисляется посредством следующей формулы (7). Выходной сигнал y0 управления во время вычисления определяется посредством датчика или другого детектора или оценивается с использованием формулы вычисления и т.д. Затем, с использованием будущего прогнозированного значения y1, будущее прогнозированное значение y2 выходного сигнала y управления на два шага вперед от времени вычисления вычисляется посредством следующей формулы (8), и с использованием будущего прогнозированного значения y2, будущее прогнозированное значение y3 выходного сигнала y управления на три шага вперед от времени вычисления вычисляется посредством следующей формулы (9). После этого, будущие прогнозированные значения yk выходного сигнала y управления до будущих прогнозированных значений yN выходного сигнала y управления на N шагов вперед от времени вычисления последовательно вычисляются посредством следующей формулы (10). Как результат, сумма N будущих прогнозированных значений выходного сигнала y управления вычисляется. Следует отметить, что значение времени, соответствующее 1 шагу, умноженное на число N шагов прогнозирования, становится секцией прогнозирования.
y1=Ay0+Bw ... (7)
y2=Ay1+Bw=A2y0+(A+1)Bw ... (8)
y3=Ay2+Bw=A3y0+(A2+A+1)Bw ... (9)
yk=Aky0+(Ak-1+Ak-2+...+1)Bw ... (10)
[0036] Фиг. 3 является графиком, схематично показывающим объектную функцию J(w). На графике по фиг. 3, ось X указывает скорректированное целевое значение w, тогда как ось Y указывает объектную функцию J(w). Объектная функция J(w) представляет собой нисходящую выступающую функцию (выпуклую функцию). По этой причине, объектная функция J(w) становится минимумом в момент, когда, наклон (градиент) объектной функции J(w) становится нулевым. Скорректированное целевое значение w, когда объектная функция J(w) становится минимальной, составляет оптимальное целевое значение wop. Следовательно, посредством поиска точки, в которой наклон объектной функции J(w) становится нулевым, можно выполнять поиск минимального значения объектной функции J(w).
[0037] Здесь, при задании max{yk-yup, 0}=f1(yk), формула (1) становится следующей формулой (11):
Математическое уравнение 4

Наклон объектной функции J(w) получается посредством следующей формулы (12) в качестве частного дифференциала для скорректированного целевого значения w объектной функции J(w):
Математическое уравнение 5

[0038] Фиг. 4 является графиком, показывающим первую функцию f1(yk). На графике по фиг. 4, ось X указывает будущее прогнозированное значение yk выходного сигнала y управления, тогда как ось Y указывает первую функцию f1(yk). Фиг. 5 является графиком, показывающим частный дифференциал для будущего прогнозированного значения yk первой функции f1(yk). На графике по фиг. 5, ось X указывает будущее прогнозированное значение yk выходного сигнала y управления, тогда как ось Y указывает частный дифференциал для будущего прогнозированного значения yk первой функции f1(yk).
[0039] Как показано на фиг. 5, частный дифференциал для будущего прогнозированного значения yk первой функции f1(yk) становится прерывистой ступенчатой функцией. Здесь, эта ступенчатая функция аппроксимируется посредством непрерывной функции, к примеру, в следующей формуле (13).
Математическое уравнение 6

Кривая, выражаемая посредством формулы (13), показана посредством штрихпунктирной линии с одной точкой на фиг. 5.
[0040] Дополнительно, как очевидно из формулы (10), частный дифференциал для скорректированного целевого значения w будущего прогнозированного значения yk становится следующей формулой (14).
Математическое уравнение 7

При задании (Ak-1+Ak-2+...+1)B=Pk и задании Aky0-yup=qk, получается следующая формула (15):
yk-yup=(Aky0-yup)+Pkw=qk +Pkw...(15)
[0041] Из формул (12), (13), (14) и (15), получается следующая формула (16):
Математическое уравнение 8

Если можно находить скорректированное целевое значение w, при котором значение частного дифференциала для скорректированного целевого значения w объектной функции J(w) (ниже называемое просто "частным дифференциалом объектной функции") становится нулевым, оптимальное целевое значение получается. Тем не менее, скорректированное целевое значение w, при котором значение частного дифференциала объектной функции становится нулевым, не может быть непосредственно найдено из формулы (16).
[0042] С другой стороны, частный дифференциал второго порядка для скорректированного целевого значения w объектной функции J(w) (ниже называемый просто "частным дифференциалом второго порядка объектной функции") становится следующей формулой (18) посредством использования следующей формулы (17):
Математическое уравнение 9

Математическое уравнение 10

Второй член в правой стороне формулы (18) всегда становится нулевым или больше. По этой причине, значение частного дифференциала второго порядка объектной функции всегда становится 2 или больше. Следовательно, частный дифференциал объектной функции монотонно увеличивается посредством наклона в 2 или больше.
[0043] Фиг. 6 и фиг. 7 являются видами для пояснения способа обновления скорректированного целевого значения в первом варианте осуществления с использованием графиков, показывающих частный дифференциал объектной функции. На графиках по фиг. 6 и фиг. 7, ось X указывает скорректированное целевое значение w, тогда как ось Y указывает частный дифференциал объектной функции. Фиг. 6 и фиг. 7 показывают фактический частный дифференциал объектной функции посредством штрихпунктирных линий с одной точкой. Скорректированное целевое значение w, когда частный дифференциал объектной функции становится нулевым, составляет оптимальное целевое значение wop.
[0044] Как указано выше, опорный регулятор 3 выполняет поиск минимальных значений объектной функции посредством обновления скорректированного целевого значения w, чтобы за счет этого выводить целевое значение wf из предварительного целевого значения r. Если предварительное целевое значение r вводится в опорный регулятор 3, опорный регулятор 3 вычисляет значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r. Rr получается посредством записи r для w в правой стороне формулы (16). Следует отметить, что в это время, первый член правой стороны формулы (16) становится нулевым. В примере по фиг. 6, Rr является положительным, тогда как в примере по фиг. 7, Rr является отрицательным.
[0045] Во-первых, поясняется пример по фиг. 6, в котором Rr является положительным. Как пояснено выше, наклон частного дифференциала объектной функции равен 2 или больше. По этой причине, частный дифференциал объектной функции проходит через точку Rr и монотонно увеличивается посредством наклона в 2 или больше. Если Rr является положительным, пересечение (r-0,5Rr) линии наклона в 2, проходящей через точку Rr, и оси X становится нижним предельным значением диапазона, в котором может присутствовать скорректированное целевое значение wop, при котором значение частного дифференциала объектной функции становится нулевым. С другой стороны, r становится верхним предельным значением диапазона, в котором может присутствовать скорректированное целевое значение wop, при котором значение частного дифференциала объектной функции становится нулевым. Следовательно, оптимальное скорректированное целевое значение wop присутствует между r-0,5Rr и r. В скорректированном целевом значении wop, объектная функция становится минимумом.
[0046] На основе вышеприведенных обнаружений, опорный регулятор 3 обновляет скорректированное целевое значение w только между r-0,5Rr и r. Вследствие этого, можно ограничивать диапазон поиска узким диапазоном, и становится легко заставлять скорректированное целевое значение w приближаться к оптимальному скорректированному целевому значению wop. Как результат, можно снижать нагрузку по обработке опорного регулятора 3.
[0047] Значение частного дифференциала объектной функции становится большим по мере того, как скорректированное целевое значение w становится большим. По этой причине, например, опорный регулятор 3 обновляет скорректированное целевое значение w посредством способа двоичного поиска в вышеприведенном диапазоне поиска. За счет этого, можно заставлять скорректированное целевое значение w эффективно приближаться к оптимальному скорректированному целевому значению wop и может гораздо больше снижать нагрузку по обработке опорного регулятора 3.
[0048] Посредством способа двоичного поиска, начальное значение w0 скорректированного целевого значения w задается равным средней точке ((2r-0,5Rr)/2) верхнего предельного значения r и нижнего предельного значения r-0,5Rr. Значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, получается посредством записи w0 для w в правой стороне формулы (16). В примере по фиг. 6, Rw0 является отрицательным. По этой причине, скорректированное целевое значение w обновляется таким образом, что скорректированное целевое значение w становится большим. В частности, первое скорректированное целевое значение w1 задается равным средней точке верхнего предельного значения r и начального значения w0 (w1=(w0+r)/2).
[0049] Значение Rw1 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет первое скорректированное целевое значение w1, получается посредством записи w1 для w в правой стороне формулы (16). В примере по фиг. 6, Rw1 является положительным. По этой причине, скорректированное целевое значение w обновляется таким образом, что скорректированное целевое значение w становится меньшим. В частности, второе скорректированное целевое значение w2 задается равным средней точке (w2=(w0+w1)/2) первого скорректированного целевого значения w1 и начального значения w0. После этого, i-ые скорректированные целевые значения wi аналогично последовательно задаются. Следует отметить, что i указывает число обновлений, и "i-ое скорректированное целевое значение wi" означает скорректированное целевое значение после обновления i раз.
[0050] Опорный регулятор 3 завершает обновление скорректированного целевого значения w и задает конечное скорректированное целевое значение wi равным целевому значению wf, когда значение частного дифференциала объектной функции, соответствующее скорректированному целевому значению w, становится нулевым, либо когда число обновлений скорректированного целевого значения w достигает предварительно определенного значения.
[0051] Далее поясняется пример по фиг. 7, в котором Rr является отрицательным. Как пояснено выше, частный дифференциал объектной функции проходит через точку Rr и монотонно увеличивается посредством наклона в 2 или больше. Если Rr является отрицательным, пересечение (r-0,5Rr) линии наклона в 2, проходящей через точку Rr, и оси X становится верхним предельным значением диапазона, в котором может присутствовать скорректированное целевое значение wop, при котором значение частного дифференциала объектной функции становится нулевым. С другой стороны, r становится нижним предельным значением диапазона, в котором может присутствовать скорректированное целевое значение wop, при котором значение частного дифференциала объектной функции становится нулевым. Следовательно, аналогично примеру по фиг. 6, оптимальное скорректированное целевое значение wop присутствует между r-0,5Rr и r. При скорректированном целевом значении wop, объектная функция становится минимумом.
[0052] В примере по фиг. 7 также, аналогично примеру по фиг. 6, опорный регулятор 3 может обновлять скорректированное целевое значение w посредством способа двоичного поиска в вышеприведенном диапазоне поиска. Для ссылки, фиг. 7 показывает начальное значение w0, первое скорректированное целевое значение w1 и второе скорректированное целевое значение w2 скорректированного целевого значения w, заданные посредством способа двоичного поиска.
[0053] Обработка для вывода целевого значения
Ниже, со ссылкой на блок-схему последовательности операций способа по фиг. 8, подробнее поясняется управление для извлечения целевого значения wf. Фиг. 8 является блок-схемой последовательности операций способа, показывающей управляющую процедуру обработки для извлечения целевого значения в первом варианте осуществления. Настоящая управляющая процедура выполняется посредством системы управления оборудованием.
[0054] Во-первых, на этапе S101, предварительное целевое значение r вычисляется на основе экзогенного входного сигнала d. Затем, на этапе S102, вычисляется значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r. Затем, на этапе S103, начальное значение w0 скорректированного целевого значения w задается равным (2r-0,5Rr)/2.
[0055] Затем, на этапе S104, вычисляется значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0. Затем, на этапе S105, оценивается то, равно или нет значение Rw0 частного дифференциала нулю. Если оценивается то, что значение Rw0 частного дифференциала не равно нулю, настоящая управляющая процедура переходит к этапу S106.
[0056] На этапе S106, i-ое скорректированное целевое значение wi задается посредством способа двоичного поиска. Начальное значение номера i обновления равно 1. Затем, на этапе S107, значение Rwi частного дифференциала объектной функции, когда скорректированное целевое значение w составляет i-ое скорректированное целевое значение wi, вычисляется. Затем, на этапе S108, оценивается то, равно или нет значение Rwi частного дифференциала нулю. Если оценивается то, что значение Rwi частного дифференциала не равно нулю, настоящая управляющая процедура переходит к этапу S109.
[0057] На этапе S109, оценивается то, составляет или нет число i обновлений предварительно определенное значение n. Предварительно определенное значение n составляет целое число в 2 или больше. Если оценивается то, что число i обновлений не составляет предварительно определенное значение n, настоящая управляющая процедура переходит к этапу S110. На этапе S110, число i обновлений постепенно увеличивается на 1. После этапа S110 настоящая управляющая процедура возвращается к этапу S106.
[0058] С другой стороны, если на этапе S105 оценивается то, что значение Rw0 частного дифференциала равно нулю, если на этапе S108 оценивается то, что значение Rwi частного дифференциала равно нулю, либо если на этапе S109 оценивается то, что число i обновлений составляет предварительно определенное значение n, настоящая управляющая процедура переходит к этапу S111. На этапе S111, целевое значение wf задается равным конечному скорректированному целевому значению wi, и число i обновлений сбрасывается до 1. После этапа S111, настоящая управляющая процедура завершается.
[0059] Следует отметить, что опорный регулятор 3 может задавать начальное значение w0 скорректированного целевого значения w равным предварительно определенному значению между r-0,5Rr и r без использования способа двоичного поиска. В этом случае, когда значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным, скорректированное целевое значение w задается большим точно на предварительно определенную величину, тогда как, когда значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным, скорректированное целевое значение w задается меньшим точно на предварительно определенную величину. После этого, скорректированное целевое значение w аналогично обновляется. Также в этом случае, опорный регулятор 3 завершает поиск минимальных значений объектной функции и задает конечное скорректированное целевое значение wi равным целевому значению wf, когда значение частного дифференциала объектной функции, соответствующее скорректированному целевому значению w, становится нулевым, либо когда число обновлений скорректированного целевого значения w достигает предварительно определенного значения.
[0060] Второй вариант осуществления
Конфигурация и управление системой управления оборудованием во втором варианте осуществления по существу являются аналогичными системе управления оборудованием первого варианта осуществления за исключением аспектов, поясненных ниже. По этой причине, ниже поясняется второй вариант осуществления настоящего изобретения с акцентированием внимания на частях, отличающихся от первого варианта осуществления.
[0061] Во втором варианте осуществления, опорный регулятор 3 задает начальное значение w0 скорректированного целевого значения w равным r-0,5Rr; r является предварительным целевым значением, тогда как Rr является значением частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r. Rr получается посредством записи r для w в правой стороне формулы (16).
[0062] Фиг. 9 и фиг. 10 являются видами для пояснения способа обновления скорректированного целевого значения во втором варианте осуществления с использованием графиков, показывающих частный дифференциал объектной функции. На графиках по фиг. 9 и фиг. 10, ось X указывает скорректированное целевое значение w, тогда как ось Y указывает частный дифференциал объектной функции. Фиг. 9 и фиг. 10 показывают фактический частный дифференциал объектной функции посредством штрихпунктирных линий с одной точкой. Скорректированное целевое значение w, когда частный дифференциал объектной функции становится нулевым, составляет оптимальное целевое значение wop.
[0063] Во-первых, поясняется пример по фиг. 9. В примере по фиг. 9, значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является положительным. Дополнительно, значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным. Частный дифференциал объектной функции монотонно увеличивается, так что оптимальное целевое значение wop становится значением, большим начального значения w0.
[0064] В примере по фиг. 9, опорный регулятор 3 обновляет скорректированное целевое значение w посредством линейной аппроксимации. В частности, опорный регулятор 3 задает пересечение линии, проходящей через точку Rr и точку Rw0, и оси X как первое скорректированное целевое значение w1.
[0065] Первое скорректированное целевое значение w1 вычисляется посредством следующей формулы (20), извлекаемой из следующей формулы (19) с использованием подобия треугольников, к примеру, как показано на фиг. 11:
(w1-w0):(r-w1)=-Rw0:Rr... (19)
w1=(Rw0r-Rrw0)/(Rw0-Rr) ... (20)
[0066] Затем, опорный регулятор 3 задает пересечение линии, проходящей через точку Rr и точку Rw1, и оси X как второе скорректированное целевое значение w2. Второе скорректированное целевое значение w2 вычисляется посредством следующей формулы (22), извлекаемой из следующей формулы (21) с использованием подобия треугольников. Следует отметить, что Rw1 получается посредством записи w1 для w в правой стороне вышеприведенной формулы (13).
(w2-w1):(r-w2)=-Rw1:Rr... (21)
w2=(Rw1r-Rrw1)/(Rw1-Rr) ... (22)
[0067] Третье и последующие скорректированные целевые значения также вычисляются аналогично. Следовательно, опорный регулятор 3 вычисляет i-ое скорректированное целевое значение wi посредством следующей формулы (4), если значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным.
wi=(Rwi-1r-Rrwi-1)/(Rwi-1-Rr) ... (4)
Здесь, Rwi-1 является значением частного дифференциала объектной функции, когда скорректированное целевое значение w составляет (i-1)-ое скорректированное целевое значение wi-1, тогда как число i обновлений составляет целое число в 1 или больше. Rwi-1 получается посредством записи wi-1 для w в правой стороне вышеприведенной формулы (16).
[0068] Далее поясняется пример по фиг. 10. В примере по фиг. 10, значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является отрицательным. Дополнительно, значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным.
[0069] В этом случае, опорный регулятор 3 задает пересечение (w0-0,5Rw0) линии наклона в 2, проходящей через точку Rr, и оси X как первое скорректированное целевое значение w1. Как результат, значение Rw1 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет первое скорректированное целевое значение w1, становится отрицательным. Частный дифференциал объектной функции монотонно увеличивается, так что оптимальное целевое значение wop становится значением, большим первого скорректированного целевого значения w1. Следует отметить, что Rw1 получается посредством записи w1 для w в правой стороне вышеприведенной формулы (16).
[0070] После этого, опорный регулятор 3 обновляет скорректированное целевое значение w посредством линейной аппроксимации. В частности, опорный регулятор 3 задает пересечение между линией, проходящей через точку Rw0 и точку Rw1, и оси X как второе скорректированное целевое значение w2. Второе скорректированное целевое значение w2 вычисляется посредством следующей формулы (24), извлекаемой из следующей формулы (23) с использованием подобия треугольников:
(w2-w1):(w0-w2)=-Rw1:Rw0... (23)
w2=(Rw1w0-Rw0w1)/(Rw1-Rw0) ... (24)
[0071] Третье и последующие скорректированные целевые значения также вычисляются аналогично. Следовательно, опорный регулятор 3 задает первое скорректированное целевое значение w1 равным w0-0,5Rw0 и вычисляет i-ое скорректированное целевое значение wi посредством следующей формулы (5), если значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным. В этом случае, число i обновлений составляет целое число в 2 или больше.
wi=(Rwi-1w0-Rw0wi-1)/(Rwi-1-Rw0) ... (5)
[0072] Дополнительно, идентично первому варианту осуществления, опорный регулятор 3 завершает обновление скорректированного целевого значения w и задает конечное скорректированное целевое значение wi равным целевому значению wf, когда значение частного дифференциала объектной функции, соответствующее скорректированному целевому значению w, становится нулевым, либо когда число обновлений скорректированного целевого значения w достигает предварительно определенного значения.
[0073] Посредством обновления скорректированного целевого значения w посредством линейной аппроксимации таким образом, можно эффективно заставлять скорректированное целевое значение w приближаться к оптимальному скорректированному целевому значению wop. Следовательно, нагрузка по обработке опорного регулятора 3 может уменьшаться еще больше.
[0074] Обработка для извлечения целевого значения
Фиг. 12-14 показывают блок-схему последовательности операций способа, показывающую управляющую процедуру обработки для извлечения целевого значения во втором варианте осуществления. Настоящая управляющая процедура выполняется посредством системы управления оборудованием.
[0075] Во-первых, на этапе S201, предварительное целевое значение r вычисляется на основе экзогенного входного сигнала d. Затем, на этапе S202, вычисляется значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r. Затем, на этапе S203, начальное значение w0 скорректированного целевого значения w задается равным r-0,5Rr.
[0076] Затем, на этапе S204, вычисляется значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0. Затем, на этапе S205, оценивается то, является или нет значение Rw0 частного дифференциала отрицательным. Если оценивается то, что значение Rw0 частного дифференциала является отрицательным, настоящая управляющая процедура переходит к этапу S206.
[0077] На этапе S206, номер i обновления задается равным 1. Затем, на этапе S207, i-ое скорректированное целевое значение wi вычисляется посредством вышеприведенной формулы (4).
[0078] Затем, на этапе S208, значение Rwi частного дифференциала объектной функции, когда скорректированное целевое значение w составляет i-ое скорректированное целевое значение wi, вычисляется. Затем, на этапе S209, оценивается то, равно или нет значение Rwi частного дифференциала нулю. Если оценивается то, что значение Rwi частного дифференциала не равно нулю, настоящая управляющая процедура переходит к этапу S210.
[0079] На этапе S210, оценивается то, составляет или нет число i обновлений предварительно определенное значение n. Предварительно определенное значение n составляет целое число в 2 или больше. Если оценивается то, что число i обновлений не составляет предварительно определенное значение n, настоящая управляющая процедура переходит к этапу S211. На этапе S211, число i обновлений постепенно увеличивается на 1. После этапа S211 настоящая управляющая процедура возвращается к этапу S207.
[0080] С другой стороны, если на этапе S209 оценивается то, что значение Rwi частного дифференциала равно нулю, либо если на этапе S210 оценивается то, что число i обновлений составляет предварительно определенное значение n, настоящая управляющая процедура переходит к этапу S212. На этапе S212, целевое значение wf задается равным конечному скорректированному целевому значению wi. После этапа S212, настоящая управляющая процедура завершается.
[0081] Дополнительно, если на этапе S205 оценивается то, что значение Rw0 частного дифференциала является положительным, настоящая управляющая процедура переходит к этапу S213. На этапе S213, первое скорректированное целевое значение w1 задается равным w0-0,5Rw0.
[0082] Затем, на этапе S214, номер i обновления задается равным 2. Затем, на этапе S215, i-ое скорректированное целевое значение wi вычисляется посредством вышеприведенной формулы (5). После этого, этапы S216-S220 выполняются аналогично этапам S208-S212 по фиг. 13. Следует отметить, что предварительно определенное значение n на этапе S218 может отличаться от предварительно определенного значения n на этапе S210.
[0083] Третий вариант осуществления
Конфигурация и управление системой управления оборудованием в третьем варианте осуществления по существу являются аналогичными системе управления оборудованием первого варианта осуществления за исключением аспектов, поясненных ниже. По этой причине, ниже поясняется третий вариант осуществления настоящего изобретения с акцентированием внимания на частях, отличающихся от первого варианта осуществления.
[0084] В третьем варианте осуществления, опорный регулятор 3 задает начальное значение w0 скорректированного целевого значения w равным предварительно определенному значению между r-0,5Rr и r; r является предварительным целевым значением, тогда как Rr является значением частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r. Rr получается посредством записи r для w в правой стороне вышеприведенной формулы (16).
[0085] Фиг. 15-18 являются видами для пояснения способа обновления скорректированного целевого значения в третьем варианте осуществления с использованием графиков, показывающих частный дифференциал объектной функции. На графиках по фиг. 15-18, ось X указывает скорректированное целевое значение w, тогда как ось Y указывает частный дифференциал объектной функции. Фиг. 15-18 показывают фактический частный дифференциал объектной функции посредством штрихпунктирных линий с одной точкой. Скорректированное целевое значение w, когда частный дифференциал объектной функции становится нулевым, составляет оптимальное целевое значение wop.
[0086] Во-первых, поясняется пример по фиг. 15. В примере по фиг. 15, значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является положительным. Дополнительно, начальное значение w0 скорректированного целевого значения w составляет значение между r-0,5Rr и r, тогда как значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным. Частный дифференциал объектной функции монотонно увеличивается, так что оптимальное целевое значение wop становится значением, большим начального значения w0. Следует отметить, что Rw0 получается посредством записи w0 для w в правой стороне вышеприведенной формулы (16).
[0087] В примере по фиг. 15, опорный регулятор 3 обновляет скорректированное целевое значение w посредством линейной аппроксимации. В частности, опорный регулятор 3 задает пересечение линии, проходящей через точку Rr и точку Rw0, и оси X как первое скорректированное целевое значение w1.
[0088] Первое скорректированное целевое значение w1 вычисляется посредством следующей формулы (20), извлекаемой из следующей формулы (19) с использованием подобия треугольников:
(w1-w0):(r-w1)=-Rw0:Rr... (19)
w1=(Rw0r-Rrw0)/(Rw0-Rr) ... (20)
[0089] Второе и последующие скорректированные целевые значения также вычисляются аналогично. Следовательно, опорный регулятор 3 вычисляет i-ое скорректированное целевое значение wi посредством следующей формулы (4), если значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является положительным, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным:
wi=(Rwi-1r-Rrwi-1)/(Rwi-1-Rr) ... (4)
Здесь, Rwi-1 является значением частного дифференциала объектной функции, когда скорректированное целевое значение w составляет (i-1)-ое скорректированное целевое значение wi-1, тогда как число i обновлений составляет целое число в 1 или больше. Rwi-1 получается посредством записи wi-1 для w в правой стороне вышеприведенной формулы (16).
[0090] Далее поясняется пример по фиг. 16. В примере по фиг. 16, значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является положительным. Дополнительно, начальное значение w0 скорректированного целевого значения w составляет значение между r-0,5Rr и r, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным.
[0091] В этом случае, опорный регулятор 3 задает пересечение (w0-0,5Rw0) линии наклона в 2, проходящей через точку Rw0, и оси X как первое скорректированное целевое значение w1. Как результат, значение Rw1 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет первое скорректированное целевое значение w1, становится отрицательным. Частный дифференциал объектной функции монотонно увеличивается, так что оптимальное целевое значение wop становится значением, большим первого скорректированного целевого значения w1. Следует отметить, что Rw1 получается посредством записи w1 для w правой стороны вышеприведенной формулы (16).
[0092] После этого, опорный регулятор 3 обновляет скорректированное целевое значение w посредством линейной аппроксимации. В частности, опорный регулятор 3 задает пересечение линии, проходящей через точку Rr и точку Rw1, и оси X как второе скорректированное целевое значение w2. Второе скорректированное целевое значение w2 вычисляется посредством следующей формулы (22), извлекаемой из следующей формулы (21) с использованием подобия треугольников:
(w2-w1):(r-w2)=-Rw1:Rr... (21)
w2=(Rw1r-Rrw1)/(Rw1-Rr) ... (22)
[0093] Третье и последующие скорректированные целевые значения также вычисляются аналогично. Следовательно, опорный регулятор 3 задает первое скорректированное целевое значение w1 равным w0-0,5Rw0 и вычисляет i-ое скорректированное целевое значение wi посредством вышеприведенной формулы (4), если значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является положительным, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным. В этом случае, число i обновлений составляет целое число в 2 или больше.
[0094] Далее поясняется пример по фиг. 17. В примере по фиг. 17, значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является отрицательным. Дополнительно, начальное значение w0 скорректированного целевого значения w составляет значение между r-0,5Rr и r, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным. Частный дифференциал объектной функции монотонно увеличивается, так что оптимальное целевое значение wop становится значением, большим начального значения w0.
[0095] В примере по фиг. 17, опорный регулятор 3 обновляет скорректированное целевое значение w посредством линейной аппроксимации. В частности, опорный регулятор 3 задает пересечение линии, проходящей через точку Rwup и точку Rw0, и оси X как первое скорректированное целевое значение w1. Верхнее предельное значение wup диапазона поиска составляет r-0,5Rr, и Rwup является значением частного дифференциала объектной функции, когда скорректированное целевое значение w составляет верхнее предельное значение wup.
[0096] Первое скорректированное целевое значение w1 вычисляется посредством следующей формулы (26), извлекаемой из следующей формулы (25) с использованием подобия треугольников:
(w1-w0):(wup-w1)=-Rw0:Rwup... (25)
w1=(Rw0wup-Rwupw0)/(Rw0-Rwup) ... (26)
[0097] Второе и последующие скорректированные целевые значения также вычисляются аналогично. Следовательно, опорный регулятор 3 вычисляет i-ое скорректированное целевое значение wi посредством следующей формулы (6), если значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является отрицательным, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является отрицательным:
wi=(Rwi-1wup-Rwupwi-1)/(Rwi-1-Rwup) ... (6)
Здесь, Rwi-1 является значением частного дифференциала объектной функции, когда скорректированное целевое значение w составляет (i-1)-ое скорректированное целевое значение wi-1, и число i обновлений составляет целое число в 1 или больше. Rwi-1 получается посредством записи wi-1 для w в правой стороне вышеприведенной формулы (16).
[0098] Далее поясняется пример по фиг. 18. В примере по фиг. 18, значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является отрицательным. Дополнительно, начальное значение w0 скорректированного целевого значения w составляет значение между r-0,5Rr и r, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным.
[0099] В этом случае, опорный регулятор 3 задает пересечение (w0-0,5Rw0) линии наклона в 2, проходящей через точку Rw0, и оси X как первое скорректированное целевое значение w1. Как результат, значение Rw1 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет первое скорректированное целевое значение w1, становится отрицательным. Частный дифференциал объектной функции монотонно увеличивается, так что оптимальное целевое значение wop становится значением, большим первого скорректированного целевого значения w1. Следует отметить, что Rw1 получается посредством записи w1 для w в правой стороне формулы (16).
[0100] После этого, опорный регулятор 3 обновляет скорректированное целевое значение w посредством линейной аппроксимации. В частности, опорный регулятор 3 задает пересечение линии, проходящей через точку Rwup и точку Rw1, и оси X как второе скорректированное целевое значение w2. Второе скорректированное целевое значение w2 вычисляется посредством следующей формулы (28), извлекаемой из следующей формулы (27) с использованием подобия треугольников:
(w2-w1):(wup-w2)=-Rw1:Rwup... (27)
w2=(Rw1wup-Rwupw1)/(Rw1-Rwup) ... (28)
[0101] Третье и последующие скорректированные целевые значения также вычисляются аналогично. Следовательно, опорный регулятор 3 задает первое скорректированное целевое значение w1 равным w0-0,5Rw0 и вычисляет i-ое скорректированное целевое значение wi посредством вышеприведенной формулы (6), если значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r, является отрицательным, и значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0, является положительным. В этом случае, число i обновлений составляет целое число в 2 или больше.
[0102] Дополнительно, идентично первому варианту осуществления, опорный регулятор 3 завершает обновление скорректированного целевого значения w и задает конечное скорректированное целевое значение wi равным целевому значению wf, когда значение частного дифференциала объектной функции, соответствующее скорректированному целевому значению w, становится нулевым, либо когда число обновлений скорректированного целевого значения w достигает предварительно определенного значения.
[0103] Посредством обновления скорректированного целевого значения w посредством линейной аппроксимации вышеприведенным способом, можно заставлять скорректированное целевое значение w эффективно приближаться к оптимальному скорректированному целевому значению wop. Следовательно, можно гораздо больше снижать нагрузку по обработке опорного регулятора 3.
[0104] Обработка для извлечения целевого значения
Фиг. 19-21 показывают блок-схему последовательности операций способа, показывающую управляющую процедуру обработки для извлечения целевого значения в третьем варианте осуществления. Настоящая управляющая процедура выполняется посредством системы управления оборудованием.
[0105] Во-первых, на этапе S301, предварительное целевое значение r вычисляется на основе экзогенного входного сигнала d. Затем, на этапе S302, вычисляется значение Rr частного дифференциала объектной функции, когда скорректированное целевое значение w составляет предварительное целевое значение r.
[0106] Затем, на этапе S303, начальное значение w0 скорректированного целевого значения w задается равным предварительно определенному значению между r-0,5Rr и r. Например, если значение Rr частного дифференциала является положительным, начальное значение w0 скорректированного целевого значения w задается равным r-0,5Rr+0,5RrC, тогда как, если значение Rr частного дифференциала является отрицательным, начальное значение w0 скорректированного целевого значения w задается равным r-0,5RrD; r-0,5Rr является нижним предельным значением диапазона поиска, когда значение Rr частного дифференциала является положительным, и 0,5Rr является длиной диапазона поиска, когда значение Rr частного дифференциала является положительным; r является нижним предельным значением диапазона поиска, когда значение Rr частного дифференциала является отрицательным, и-0,5Rr является длиной диапазона поиска, когда значение Rr частного дифференциала является отрицательным. C и D предварительно определены и являются числами между 0 и 1.
[0107] Затем, на этапе S304, вычисляется значение Rw0 частного дифференциала объектной функции, когда скорректированное целевое значение w составляет начальное значение w0. Затем, на этапе S305, оценивается то, равно или нет значение Rw0 частного дифференциала нулю. Если оценивается то, что значение Rw0 частного дифференциала равно нулю, настоящая управляющая процедура переходит к этапу S306. На этапе S306, целевое значение wf задается равным начальному значению w0. После этапа S306, настоящая управляющая процедура завершается.
[0108] С другой стороны, если на этапе S305 оценивается то, что значение Rw0 частного дифференциала не равно нулю, настоящая управляющая процедура переходит к этапу S307. На этапе S307, оценивается то, является или нет значение Rw0 частного дифференциала отрицательным. Если оценивается то, что значение Rw0 частного дифференциала является отрицательным, настоящая управляющая процедура переходит к этапу S308.
[0109] На этапе S308, номер i обновления задается равным 1. Затем, на этапе S309, оценивается то, является или нет значение Rr частного дифференциала положительным. Если оценивается то, что значение Rr частного дифференциала является положительным, настоящая управляющая процедура переходит к этапу S310. На этапе S310, i-ое скорректированное целевое значение wi вычисляется посредством вышеприведенной формулы (4).
[0110] С другой стороны, если на этапе S309 оценивается то, что значение Rr частного дифференциала является отрицательным, настоящая управляющая процедура переходит к этапу S311. На этапе S311, i-ое скорректированное целевое значение wi вычисляется посредством вышеприведенной формулы (6).
[0111] После этапа S310 или этапа S311, настоящая управляющая процедура переходит к этапу S312. На этапе S312, значение Rwi частного дифференциала объектной функции, когда скорректированное целевое значение w составляет i-ое скорректированное целевое значение wi, вычисляется. Затем, на этапе S313, оценивается то, равно или нет значение Rwi частного дифференциала нулю. Если оценивается то, что значение Rwi частного дифференциала не равно нулю, настоящая управляющая процедура переходит к этапу S314.
[0112] На этапе S314, оценивается то, составляет или нет число i обновлений предварительно определенное значение n. Предварительно определенное значение n составляет целое число в 2 или больше. Если оценивается то, что число i обновлений не составляет предварительно определенное значение n, настоящая управляющая процедура переходит к этапу S315. На этапе S315, число i обновлений постепенно увеличивается на 1. После этапа S315, настоящая управляющая процедура возвращается к этапу S309.
[0113] С другой стороны, если на этапе S313 оценивается то, что значение Rwi частного дифференциала равно нулю, либо если на этапе S314 оценивается то, что число i обновлений составляет предварительно определенное значение n, настоящая управляющая процедура переходит к этапу S316. На этапе S316, целевое значение wf задается равным конечному скорректированному целевому значению wi. После этапа S316, настоящая управляющая процедура завершается.
[0114] Дополнительно, если на этапе S307 оценивается то, что значение Rw0 частного дифференциала является положительным, настоящая управляющая процедура переходит к этапу S317. На этапе S317, первое скорректированное целевое значение w1 задается равным w0-0,5Rw0.
[0115] Затем, на этапе S318, номер i обновления задается равным 2. Затем, на этапе S319, оценивается то, является или нет значение Rr частного дифференциала положительным. Если оценивается то, что значение Rr частного дифференциала является положительным, настоящая управляющая процедура переходит к этапу S320. На этапе S320, i-ое скорректированное целевое значение wi вычисляется посредством вышеприведенной формулы (4).
[0116] С другой стороны, если на этапе S319 оценивается то, что значение Rr частного дифференциала является отрицательным, настоящая управляющая процедура переходит к этапу S321. На этапе S321, i-ое скорректированное целевое значение wi вычисляется посредством вышеприведенной формулы (6).
[0117] После этапа S320 или этапа S321, настоящая управляющая процедура переходит к этапу S322. После этого, этап S322-S326 выполняется аналогично этапам S312-S316 по фиг. 20. Следует отметить, что предварительно определенное значение n на этапе S324 может отличаться от предварительно определенного значения n на этапе S314.
[0118] Другие варианты осуществления
Выше пояснены предпочтительные варианты осуществления согласно настоящему изобретению, но настоящее изобретение не ограничено этими вариантами осуществления и может модифицироваться и изменяться различными способами в пределах терминологии формулы изобретения.
[0119] Например, если выходной сигнал y управления имеет нижнее предельное значение ylow, объектная функция J(w) задается посредством следующей формулы (2):
Математическое уравнение 11

В этом случае, штрафная функция (второй член в правой стороне формулы (2)), выражающая степень удовлетворения ограничивающего условия, связанного с выходным сигналом y управления, имеет такую конфигурацию, в которой когда будущее прогнозированное значение yk выходного сигнала y управления ниже нижнего предельного значения ylow, разность между нижним предельным значением ylow и будущим прогнозированным значением yk задается как штраф объектной функции J(w). По этой причине, значение объектной функции J(w) становится тем меньшим, чем меньше величина, на которую будущее прогнозированное значение yk выходного сигнала y управления опускается ниже нижнего предельного значения ylow.
[0120] Дополнительно, при задании max{ylow-yk, 0}=f2(yk), вышеприведенная формула (2) становится следующей формулой (29).
Математическое уравнение 12

Дополнительно, наклон объектной функции J(w) выражается посредством следующей формулы (30) в качестве частного дифференциала для скорректированного целевого значения w объектной функции J(w):
Математическое уравнение 13

[0121] Фиг. 22 является графиком, показывающим вторую функцию f2(yk). На графике по фиг. 22, ось X указывает будущее прогнозированное значение yk выходного сигнала y управления, тогда как ось Y выражает вторую функцию f2(yk). Фиг. 23 является графиком, показывающим частный дифференциал для будущего прогнозированного значения yk второй функции f2(yk). На графике по фиг. 23, ось X указывает будущее прогнозированное значение yk выходного сигнала y управления, тогда как ось Y выражает частный дифференциал для будущего прогнозированного значения yk второй функции f2(yk).
[0122] Как показано на фиг. 23, частный дифференциал будущего прогнозированного значения yk второй функции f2(yk) становится прерывистой ступенчатой функцией. Здесь, эта ступенчатая функция аппроксимируется посредством непрерывной функции, к примеру, как показано в следующей формуле (31):
Математическое уравнение 14

Кривая, выражаемая посредством формулы (31), показана посредством штрихпунктирной линии с одной точкой на фиг. 23.
[0123] Дополнительно, частный дифференциал скорректированного целевого значения w будущего прогнозированного значения yk становится следующей формулой (14):
Математическое уравнение 15

При задании (Ak-1+Ak-2+...+1)B=Pk и задании Aky0-ylow=sk, получается следующая формула (32):
yk-ylow=(Aky0-ylow)+Pkw=sk+Pkw ... (32)
[0124] Из вышеприведенных формул (30), (31), (14) и (32), получается следующая формула (33).
Математическое уравнение 16

[0125] Частный дифференциал второго порядка объектной функции становится следующей формулой (34) посредством использования следующей формулы (17):
Математическое уравнение 17

Математическое уравнение 18

Второй член в правой стороне вышеприведенной формулы (34) всегда становится нулевым или больше. По этой причине, значение частного дифференциала второго порядка объектной функции всегда становится 2 или больше.
[0126] Следовательно, частный дифференциал объектной функции увеличивается монотонно посредством наклона в 2 или больше. По этой причине, даже если объектная функция J(w) задается посредством вышеприведенной формулы (2), способ аналогично случаю, в котором объектная функция J(w) задается посредством вышеприведенной формулы (1), может использоваться для того, чтобы выполнять поиск минимальных значений объектной функции.
[0127] Дополнительно, при обновлении скорректированного целевого значения w посредством линейной аппроксимации, значение частного дифференциала объектной функции, соответствующее обновленному скорректированному целевому значению w, может становиться положительным значением. Например, если, аналогично второму варианту осуществления, начальное значение w0 скорректированного целевого значения w задается равным r-0,5Rr, иногда значение Rw1 частного дифференциала объектной функции, соответствующее первому скорректированному целевому значению w1, вычисленному посредством линейной аппроксимации, становится положительным значением.
[0128] Фиг. 24 является видом для пояснения способа обновления скорректированного целевого значения во втором варианте осуществления с использованием графика, показывающего частный дифференциал для скорректированного целевого значения объектной функции. На графике по фиг. 24, ось X указывает скорректированное целевое значение w, тогда как ось Y указывает частный дифференциал объектной функции. Фиг. 24 показывает фактический частный дифференциал объектной функции посредством штрихпунктирной линии с одной точкой. Скорректированное целевое значение w, когда частный дифференциал объектной функции становится нулевым, составляет оптимальное целевое значение wop. В примере по фиг. 24, геометрическое место частного дифференциала объектной функции отличается от примера по фиг. 9.
[0129] В примере по фиг. 24, значение Rw1 частного дифференциала объектной функции, соответствующее первому скорректированному целевому значению w1, которое представляет собой пересечение линии, проходящей через точку Rr и точку Rw0, и оси X, является положительным значением. Также в этом случае, аналогично примеру по фиг. 9, опорный регулятор 3 задает пересечение линии, проходящей через точку Rr и точку Rw1, и оси X как второе скорректированное целевое значение w2. Второе скорректированное целевое значение w2 вычисляется посредством следующей формулы (36), извлекаемой из следующей формулы (35) с использованием подобия треугольников, к примеру, как показано на фиг. 25:
(w1-w2):(r-w2)=Rw1:Rr... (35)
w2=(Rw1r-Rrw1)/(Rw1-Rr) ... (36)
[0130] Формула (36) является идентичной вышеприведенной формуле (22), связанной с примером по фиг. 9. Следовательно, независимо от геометрического места частного дифференциала объектной функции, при обновлении скорректированного целевого значения w посредством линейной аппроксимации, i-ое скорректированное целевое значение wi может вычисляться посредством вышеприведенной формулы (4).
[0131] Дополнительно, система управления оборудованием в варианте осуществления может применяться ко всем видам оборудования, в которых может оцениваться будущее прогнозированное значение одного выходного сигнала управления, имеющего ограничивающее условие. Например, оборудование представляет собой систему впуска/выпуска выхлопных газов дизельного двигателя, тогда как выходной сигнал управления представляет собой давление нагнетания. В этом случае, экзогенный входной сигнал d представляет собой частоту вращения двигателя и объем впрыска топлива, и входной сигнал u управления представляет собой степень открытия регулируемого сопла, предоставленного в турбине турбонагнетателя.
[0132] Дополнительно, оборудование может представлять собой EGR-систему дизельного двигателя, и выходной сигнал управления может представлять собой EGR-отношение. Дополнительно, оборудование может представлять собой актуатор (например, регулируемое сопло, EGR-клапан, дроссельный клапан и т.д.), и выходной сигнал управления может представлять собой степень открытия актуатора. Дополнительно, оборудование может представлять собой систему с общей топливной магистралью, и выходной сигнал управления может представлять собой магистральное давление. Дополнительно, оборудование может представлять собой систему или актуатор двигателя внутреннего сгорания, отличного от дизельного двигателя, такого как бензиновый двигатель, транспортного средства, станка и т.д.
Список позиционных обозначений
[0133] 2 - часть вычисления предварительных целевых значений
3 - опорный регулятор
5 - контроллер с обратной связью
6 - оборудование
Реферат
Изобретение относится к управлению транспортным средством, в частности, для определения целевого значения параметра управления, например, давления нагнетания или отношения рециркуляции отработавших газов (EGR) двигателя внутреннего сгорания. Техническим результатом является снижение нагрузки обработки опорного регулятора, когда выполняется поиск минимальных значений объектной функции. Предложена система управления оборудованием транспортного средства, содержащая: контроллер (5) с обратной связью для определения входного сигнала управления оборудования (6) так, что один выходной сигнал управления оборудования приближается к целевому значению, часть (2) вычисления предварительных целевых значений для вычисления предварительного целевого значения на основе предварительно определенного параметра оборудования, и опорный регулятор (3) для поиска минимальных значений объектной функции посредством обновления скорректированного целевого значения, чтобы за счет этого выводить целевое значение из предварительного целевого значения. Опорный регулятор также выполнен с возможностью обновлять скорректированное целевое значение только между r-0,5Rи r, где Rявляется значением частного дифференциала для скорректированного целевого значения w объектной функции, когда скорректированное целевое значение w представляет собой предварительное целевое значение r. 9 з.п. ф-лы, 27 ил.
Формула


Комментарии