Способ обучения по ошибке обратной связи в нелинейных системах (варианты) - RU2670551C2
Код документа: RU2670551C2
Чертежи



Описание
Область техники, к которой относится изобретение
Изобретение относится к системам и способам управления транспортным средством, в частности к способам управления исполнительными механизмами транспортного средства.
Уровень техники
Обучение по ошибке с использованием обратной связи (FEL) представляет собой способ определения линейной инверсной модели объекта или модели нейронной сети. Инверсная модель объекта может быть использована как часть системы опережающего управления для управления объектом. Например, если в инверсную модель объекта может быть введена желаемая траектория работы исполнительного механизма, на выходе инверсной модели будет получен управляющий сигнал для соблюдения желаемой траектории. Инверсная модель объекта может быть определена с помощью FEL путем адаптации параметров линейной инверсной модели объекта с опережающим управлением или нейронной сети на основании выходного сигнала регулятора с обратной связью. Инверсная линейная модель или модель нейронной сети является основой для управляющих сигналов, в то время как выходной сигнал регулятора с обратной связью используют для адаптации параметров линейной модели или модели нейронной сети и корректировки управляющих воздействий, полученных из инверсной модели. В данном случае рассматривают два типа системы FEL: система FEL с моделью нейронной сети и система FEL с линейной моделью.
Процесс FEL был изначально предложен как способ управления устройством или аппаратурой аналогично тому, как человеческий мозг управляет движением руки или ноги. Биологические системы управления, в состав которых входит мозг, могут иметь медленную или запаздывающую обратную связь. Однако некоторые исследователи убеждены, что мозг обеспечивает быстрое и плавное управляющее воздействие на основании данных из инверсной модели объекта. С этими данными мозг может давать команду конечности для движения по желаемой траектории без необходимости ожидания сигнала обратной связи от нервов или органов чувств.
Изначально исследования FEL касались только модели нейронных сетей. Модели нейронных сетей можно применять для управления любым нелинейным объектом. Однако модели нейронных сетей имеют сложную структуру, и следовательно, могут возникать большие трудности при выполнении теоретического анализа управления, осуществляемого в соответствии с моделью нейронных сетей. Например, сложность может возникнуть во время выполнения анализа устойчивости системы управления при использования нейронной сети. Кроме того модели нейронных сетей по своей природе являются в какой-то мере черным или серым ящиком. Следовательно, при объединении FEL с моделью нейронных сетей, данный подход становится непригодным для практического использования.
Позже специалисты в области теории управления представили FEL с линейными моделями и продемонстрировали, что можно проанализировать устойчивость данной FEL с линейными моделями. Однако объединение FEL с линейной моделью делает ее пригодной только для линейных объектов. Таким образом, FEL с моделями нейронных сетей или линейными моделями имеет в некоторой степени ограниченную область применения на практике.
Раскрытие изобретения
Авторы изобретения учли вышеперечисленные недостатки и разработали FEL с кусочно-билинейной моделью. В соответствии со способом управления системой формируют псевдоинверсную кусочно-билинейную модель объекта управления; адаптируют псевдоинверсную кусочно-билинейную модель на основании выходного сигнала регулятора с обратной связью; и настраивают работу исполнительного механизма в зависимости от псевдоинверсной кусочно-билинейной модели.
Адаптация псевдоинверсной кусочно-билинейной модели в зависимости от выходного сигнала от регулятора с обратной связью позволяет обеспечить технический результат, заключающийся в улучшении опережающего управления для нелинейных систем. В частности, инверсная модель исполнительного механизма может быть описана в N-мерной справочной таблице. Входные элементы и вершины справочной таблицы могут быть настроены с помощью входных данных от регулятора с обратной связью таким образом, чтобы его выходные данные, в конечном счете, стремились к нулю. Справочная таблица предоставляет практически точную инверсную модель контролируемого объекта, когда выходной сигнал регулятора с обратной связью достигает нуля. Следовательно, управляющий выходной сигнал справочной таблицы для исполнительного механизма или объекта может привести к тому, что объект будет следовать по желаемой траектории, которая была использована как основание для индексации данных в таблице.
Кроме того, использование FEL с кусочно-билинейной моделью позволяет управлять любым нелинейным объектом, как и в случае с моделью нейронных сетей, но более очевидным образом. Например, кусочно-билинейная модель является более ясной, поскольку представляет собой справочную таблицу. Следовательно, система FEL с кусочно-билинейной моделью пригодна для практического использования. Кроме того кусочно-билинейная модель является параметрической, как и линейная модель. Следовательно, может быть легко выполнен теоретический анализ управления, осуществляемый системой.
Настоящее изобретение может предусматривать ряд преимуществ. Например, данный способ может позволить исполнительному механизму более точно соблюдать желаемую траекторию. Кроме того, данный способ способствует улучшению работы исполнительного механизма в системе управления. Также данный способ может быть применен к существующим системам управления транспортным средством, в которых широко распространены нелинейные объекты, и для управления часто применяют справочные таблицы.
Вышеуказанные и другие преимущества, и признаки изобретения явно указаны в следующем подробном описании, которое может быть рассмотрено как отдельно, так и со ссылкой на сопроводительные чертежи.
Следует понимать, что сущность изобретения приводится выше с целью представления в упрощенной форме отдельных принципов, которые далее изложены в подробном описании. Она не предназначена для определения ключевых или основных особенностей заявленного объекта, область применения которого однозначно определена формулой изобретения. Кроме того, заявленный объект изобретения не ограничен вариантами, которые устраняют недостатки, указанные выше или упомянутые в любой части настоящего раскрытия.
Краткое описание чертежей
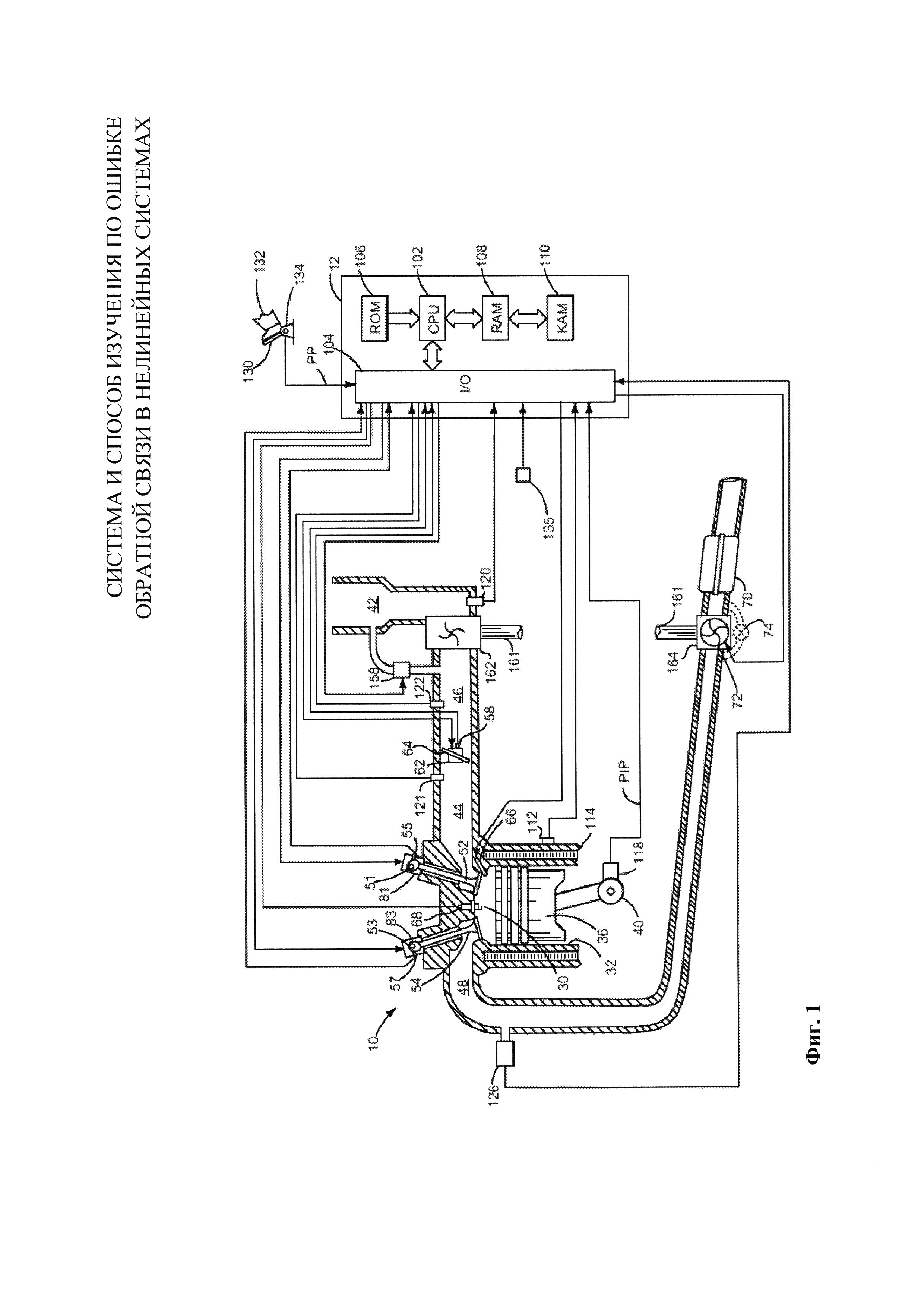
На фиг. 1 показано схематическое изображение двигателя;
на фиг. 2 показано транспортное средство, в котором может работать двигатель;
на фиг. 3 показан пример блок-схемы регулятора;
на фиг. 4 показан пример способа эксплуатации линейного и нелинейного объекта.
Осуществление изобретения
Изобретение относится к улучшению работы нелинейных исполнительных механизмов и систем. Исполнительные механизмы и системы могут входить в состав более крупной системы. По варианту, представленном на фиг. 1 и 2, исполнительные механизмы и системы могут быть встроены в транспортное средство и силовую установку. На фиг. 3 представлена упрощенная схема регулятора. На фиг. 4 показан один пример способа работы регулятора, который предусматривает адаптацию инверсной кусочно-билинейной модели контролируемого объекта.
На фиг. 1 представлен двигатель 10 внутреннего сгорания, который имеет несколько цилиндров, один из которых изображен на фиг. 1, при этом управление двигателем 10 осуществляет электронный регулятор 12 двигателя. Двигатель 10 содержит камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, который расположен внутри них и соединен с коленчатым валом 40. Изображенная камера 30 сгорания соединена с впускным коллектором 44 и выпускным коллектором 48 через соответствующие впускной клапан 52 и выпускной клапан 54. Каждым впускным и выпускным клапанами можно управлять посредством впускного кулачка 51 и выпускного кулачка 53. Впускной кулачок 51 и выпускной кулачок 53 могут вращаться относительно коленчатого вала 40 с помощью исполнительного механизма 81 впускного кулачка и исполнительного механизма 83 выпускного кулачка. Положение впускного кулачка 51 можно определить с помощью датчика 55 впускного кулачка. Положение выпускного кулачка 53 можно определить с помощью датчика 57 выпускного кулачка.
Изображенная топливная форсунка 66 расположена с возможностью впрыскивать топливо непосредственно в камеру 30 сгорания, что известно специалистам в данной области техники как прямой впрыск. Топливная форсунка 66 подает топливо пропорционально длине импульса сигнала от регулятора 12. Воспламенение воздушно-топливной смеси в камере 30 сгорания может быть выполнено с помощью запальной свечи 68. По вариантам дроссель 62, запальная свеча 68, кулачки 51 и 53, а также топливная форсунка 66 могут быть обозначены как механизмы передачи крутящего момента от двигателя.
Впускной коллектор 44 соединен с дополнительным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для регулировки воздушного потока из впускной камеры 46 наддува. Воздух из впускного отверстия 42 для воздуха попадает в компрессор 162, откуда он подается в камеру 46 наддува. Выхлопные газы раскручивают турбину 164, соединенную с компрессором 162 посредством вала 161. По вариантам может присутствовать охладитель воздуха наддува. Скорость компрессора может быть отрегулирована с помощью изменения положения регулятора 72 лопаток или перепускного клапана 158 компрессора. В других примерах в качестве варианта или дополнения вместо регулятора 72 лопаток может быть использована перепускная заслонка 74. Регулятор 72 лопаток изменяет положение лопаток турбины с изменяемой геометрией. Когда лопатки находятся в открытом положении, выхлопные газы могут проходить через турбину 164, передавая небольшую энергию для вращения турбины 164. Когда лопатки находятся в закрытом положении, выхлопные газы могут проходить через турбину 164, передавая больше энергии для вращения турбины 164. По варианту перепускная заслонка 74 позволяет выхлопным газам проходить вокруг турбины 164 таким образом, чтобы уменьшить количество энергии, передаваемое турбине. Перепускной клапан 158 компрессора позволяет сжатому воздуху на выходе компрессора 162 возвращаться на вход компрессора 162. В данном случае можно снизить производительность компрессора 162 таким образом, чтобы уменьшить поток воздуха через компрессор 162 и снизить вероятность помпажа компрессора.
По варианту универсальный датчик 126 содержания кислорода в выхлопных газах (UEGO) может быть соединен с выпускным коллектором 48 выше по потоку относительно устройства 70 снижения токсичности выхлопных газов. В других примерах датчик UEGO может быть расположен ниже по потоку относительно одного или нескольких устройств для предварительной очистки выхлопных газов.
Устройство 70 снижения токсичности выхлопных газов содержит трехкомпонентный нейтрализатор в форме множества каталитических блоков. В другом варианте может быть использовано несколько устройств снижения токсичности выхлопных газов, при этом каждое из них может состоять из множества каталитических блоков. По варианту устройством 70 снижения токсичности выхлопных газов может быть окислительный нейтрализатор. В других вариантах устройство снижения токсичности выхлопных газов может содержать уловитель обедненных NOx или катализатор селективного восстановления (SCR), и (или) сажевый фильтр (DPF), и (или) ловушку для углеводородов.
По вариантам, в которых двигатель 10 представляет собой дизельный двигатель, устройство 66 может быть запальной свечей, а устройство 68 может быть топливной форсункой. Регулировка момента срабатывания топливной форсунки может быть выполнена относительно положения коленчатого вала 40 для управления моментом зажигания.
Регулятор 12 по фиг. 1 представляет собой микрокомпьютер, содержащий: блок 102 микропроцессора, порты ввода/ вывода 104, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и стандартную шину данных. Помимо вышеописанных сигналов, регулятор 12 принимает различные сигналы от соединенных с двигателем 10 датчиков, в том числе: значение температуры охлаждающей жидкости двигателя (ЕСТ) от датчика 112 температуры, соединенного с охлаждающим рукавом 114; положение педали газа, регулируемой ногой 132, от датчика 134 положения, соединенного с педалью газа 130; давление в коллекторе двигателя (MAP) от датчика 121 давления, соединенного с впускным коллектором 44; давление наддува от датчика 122 давления; концентрацию кислорода в выхлопных газов от датчика 126 кислорода; положение двигателя от датчика 118 Холла, определяющего положение коленчатого вала 40; массовый расход воздуха, поступающего в двигатель, от датчика 120 (например, от термоанемометра); положение дросселя от датчика 58. Датчик 135 атмосферного давления может быть также использован для последующей обработки регулятором 12. В предпочтительном варианте при каждом повороте коленчатого вала датчик 118 положения двигателя генерирует предварительно установленное количество импульсов через равные промежутки времени, с помощью которых можно определить частоту вращения двигателя (об./мин.).
Во время работы каждый цилиндр в двигателе 10 обычно проходит четырехтактный цикл: цикл содержит такт впуска, такт сжатия, такт расширения и такт выпуска. В общем случае во время такта впуска выпускной клапан 54 закрыт, а впускной клапан 52 открыт. Воздух поступает в камеру 30 сгорания через впускной коллектор 44, причем поршень 36 перемещается в нижнюю часть цилиндра таким образом, чтобы увеличить объем внутри камеры 30 сгорания. Положение, в котором поршень 36 находится в нижней части цилиндра в конце своего хода (например, при наибольшем объеме камеры 30 сгорания), как правило, известен специалистам в данной области техники как нижняя мертвая точка (BDC). При такте сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 перемещается к головке цилиндра таким образом, чтобы сжать воздух внутри камеры 30 сгорания. Точка, в которой поршень 36 находится в конце своего такта и наиболее близок к головке цилиндра (например, при наименьшем объеме камеры 30 сгорания), как правило, известен специалистам в данной области техники как верхняя мертвая точка (TDC). Во время процесса, называемого в данном описании впрыском, топливо поступает в камеру сгорания. В некоторых вариантах впрыск топлива в цилиндр может быть выполнен несколько раз во время одного цикла цилиндра. Во время процесса зажигания топливно-воздушную смесь зажигают с помощью подаваемой в цилиндр искры. По варианту процесс горения может быть начат путем воспламенения сжатием. При такте расширения расширяющиеся газы толкают поршень 36 назад к BDC. Коленчатый вал 40 преобразует движение поршня в крутящий момент вращающегося вала. Наконец, при такте выпуска выпускной клапан 54 открывается для выпуска сгоревшей воздушно-топливной смеси в выпускной коллектор 48, поршень возвращается в TDC. Следует заметить, что все вышеописанное приведено исключительно для примера и что моменты открытия и/или закрытия впускного или выпускного клапанов могут быть изменены для того, чтобы обеспечить положительное или отрицательное перекрытие клапана, позднее закрытие впускного клапана или различные другие примеры. Кроме того, в некоторых вариантах двухтактный цикл может быть применен вместо четырехтактного цикла.
На фиг. 2 представлено транспортное средство, в котором может работать двигатель 10. Транспортное средство 202 содержит двигатель 10. По варианту транспортное средство 202 также может содержать электродвигатель/генератор 255 для выборочной передачи крутящего момента автомобильной трансмиссии. Транспортное средство 202 также может иметь датчик 290 объектов для обнаружения объектов на пути транспортного средства, а также для регулировки работы транспортного средства в зависимости от обнаружения объекта. Например, в случае обнаружения объекта на пути транспортного средства могут быть включены тормоза 226 и скорректирована работа трансмиссии двигателя 10. Тормоза 226 могут быть включены автоматически путем увеличения давления в тормозной линии с помощью гидравлического насоса 228. Также исполнительный механизм 224 подвески может отрегулировать высоту транспортного средства относительно дороги, а также сделать езду более плавной или более жесткой путем изменения амортизации подвески.
На фиг. 3 представлен пример схемы регулятора. Регулятор 300 содержит опорный сигнал или траекторию, обозначенную с помощью опорного сигнала. Опорный сигнал представляет собой входные данные для справочной таблицы 302 и суммирующую точку 306. Производную опорного сигнала по времени берут в точке 304 и передают в справочную таблицу 302.
Справочная таблица 302 содержит входные элементы и вершины, которые описывают инверсную или псевдоинверсную модель объекта 320. Справочная таблица 320 работает как кусочно-билинейная модель. По данному варианту опорный входной сигнал и его производная по времени являются входными данными для индексации справочной таблицы 320. Если объект 320 является линейным и обратимым, то справочная таблица 302 является инверсией объекта 320. Если объект 320 является нелинейным и необратимым, то справочная таблица 302 является псевдоинверсией или приближенной инверсией объекта 320, поскольку объект 320 является неинвертируемым. Выходное значение из справочной таблицы 302 позволяет получить упреждающий компонент uff управляющего выходного сигнала u для объекта 320. Регулятор 308 с обратной связью позволяет получить компонент ufb обратной связи управляющего выходного сигнала u для объекта 320. Параметры uff и ufb складываются вместе в суммирующей точке 310 перед вводом в объект 320. Объект 320 может представлять собой исполнительный механизм в системе, показанный на фиг. 1 и 2. По варианту объект 320 может представлять собой объект в любой системе, в которой он может быть аппроксимирован с помощью кусочно-билинейной модели. Отклик у объекта 320 является сигналом обратной связи для суммирующей точки 306, в котором он вычитается из опорного входного сигнала для получения величины ошибки. Величина ошибки является входным значением для регулятора 308 с обратной связью. Регулятор 308 с обратной связью может являться пропорционально-интегральным регулятором или регулятором другого известного типа. Выходные данные от регулятора 308 с обратной связью направляют в справочную таблицу 302 и суммирующую точку 310. Входные элементы и вершины справочной таблицы 302 адаптируют в зависимости от выходного сигнала регулятора 308 с обратной связью. Таким образом, выходной сигнал регулятора 308 с обратной связью предназначен для исключения ошибки, создаваемой инверсной или псевдоинверсной моделью, которая представлена в виде справочной таблицы 302, а также для стабилизации работы объекта 320 и уменьшения влияния ошибок, которые могут присутствовать в справочной таблице 320 во время ее применения к улучшенной инверсной или псевдоинверсной модели объекта 320.
На фиг. 4 представлен пример способа работы линейного или нелинейного объекта, который может быть описан в виде инверсной или псевдоинверсной кусочно-билинейной модели. Кусочно-билинейная модель полностью является параметрической моделью, пригодной для представления линейных и нелинейных систем. Способ на фиг. 4 может быть представлен в виде исполняемых инструкций, хранящихся в энергонезависимой памяти системы, например, системы с фиг. 1 и 2.
На этапе 402 способа 400 определяют регулятор с обратной связью для работы объекта. Объектом может быть исполнительный механизм в системе транспортного средства, представленной на фиг. 1 и 2. По варианту объект может находиться в любой системе, в которой его можно описать с помощью кусочно-билинейной модели. Также объект может быть линейным или нелинейным.
По варианту упреждающий регулятор может быть идентифицирован и создан на основе автономных данных об объекте. Также упреждающий регулятор может быть воплощен в виде инверсной или псевдоинверсной кусочно-билинейной модели. Кусочно-билинейная модель всегда формируется с помощью матриц, а каждое значение матрицы называется вершиной в кусочно-билинейной модели. В одном примере, в котором модель упреждающего регулирования применяет кусочно-билинейную модель, выраженную справочной таблицей, индексация которой производится одной или несколькими переменными. Оси таблицы могут быть определены, как ожидаемые пределы одной или нескольких индексных переменных (например, ось Y соответствует скорости двигателя, а ось X соответствует нагрузке на двигатель, при этом ось Y может иметь значения от 0 до 1, а ось X может иметь значения от 0 до 7000 об/мин). Вершины справочной таблицы могут быть равномерно разделены на основе размеров таблицы и значений оси X и Y. Однако в других вариантах может быть предоставлен более сложный способ для определения инверсной или псевдоинверсной модели. Например, кусочно-билинейная модель может быть определена посредством минимизации индекса производительности на основе m образцов входных и выходных сигналов объекта. После определения упреждающего регулятора способ 400 переходит на этап 402.
На этапе 404 способ 400 определяет регулятор с обратной связью для управления объектом и формирования входного сигнала для адаптации упреждающего регулятора. По варианту регулятор с обратной связью может быть пропорционально-интегральным регулятором, от которого управляющий сигнал для объекта основан на ошибке, полученной из разницы между управляющим сигналом, переданным объекту, и откликом от этого объекта. Управляющий сигнал для объекта корректируют на соответствующее значение ошибки. Также управляющий сигнал для объекта корректируют на основе суммарной ошибки. В частности, соответствующую величину ошибки и суммарную ошибку складывают и подают на вход объекта в качестве управляющего сигнала. По другим вариантам в качестве регулятора с обратной связью могут быть применены регуляторы других типов. Например, в качестве регулятора с обратной связью может быть использован пропорционально-интегрально-дифференциальный (PID) регулятор. По другим вариантам в качестве регулятора с обратной связью может выступать водитель транспортного средства. Например, водитель может изменять управляющие воздействия, когда работа транспортного средства не соответствует ожидаемому или прогнозируемому результату. Ошибка, переданная регулятору с обратной связью, может быть вызвана ошибками в номинальной модели объекта, отклонением в условиях окружающей среды от номинальных условий, неверным упреждающим регулятором, либо отклонением упреждающего регулятора от номинальных калибровочных значений. После определения регулятора с обратной связью способ 400 переходит на этап 406.
На этапе 406 способа 400 принимают данные о требуемой траектории объекта или управляющий входной сигнал. Требуемая траектория объекта может быть основана на желаемой заданной траектории, которая приводит к формированию желаемого отклика от объекта. Например, на этапе 406 в систему управления может быть введена требуемая скорость включения тормозов, которые останавливают транспортное средство без проскальзывания колес. В других вариантах в зависимости от управляемого объекта могут быть введены в систему другие желаемые управляющие сигналы для других исполнительных механизмов, например, для исполнительных механизмов распределительных валов, исполнительных механизмов дросселей, топливных форсунок, исполнительных механизмов регулировки скорости транспортного средства, исполнительных механизмов регулировки крутящего момента, исполнительных механизмов перепускной заслонки турбонагнетателя, исполнительных механизмов системы климат-контроля, а также исполнительных механизмов подвески транспортного средства.
Требуемая траектория объекта является входным сигналом для упреждающего регулятора. Требуемая траектория объекта также является входным сигналом для регулятора с обратной связью, как часть ошибки, определенной путем вычитания отклика объекта от сигнала требуемой траектории объекта, как показано на фиг. 3. Затем способ 400 переходит на этап 408.
На этапе 408 способа 400 суммируют выходной сигнал упреждающего регулятора и выходной сигнал регулятора с обратной связью для формирования управляющего компонента сигнала u для объекта. Таким образом, управляющий сигнал для объекта содержит упреждающий компонент управляющего сигнала u и компонент обратной связи для управляющего сигнала u. Если упреждающий компонент управляющего сигнала не содержит ошибки, то компонент обратной связи для управляющего сигнала стремится к нулю. После суммирования упреждающего компонента и компонента обратной связи управляющих сигналов способ 400 переходит на этап 410.
На этапе 410 способа 400 производят регулировку работы объекта. Объект может представлять собой исполнительный механизм, при этом исполнительный механизм может быть исполнительными механизмами регулировки крутящего момента двигателя, исполнительными механизмами подвески транспортного средства, исполнительными механизмами регулировки скорости или другими исполнительными механизмами, которые могут быть описаны кусочно-билинейной моделью. Также некоторые из приведенных исполнительных механизмов могут быть отрегулированы одновременно для управления скоростью транспортного средства, крутящим моментом двигателя, а также характеристиками, соответствующими условиям дорожного движения. Также несколько вариантов способа с фиг. 4, могут быть объединены для управления двигателем или транспортным средством. Например, можно одновременно управлять дросселем двигателя и впускным кулачком с помощью различных вариантов способа по фиг. 4 или одним вариантом способа по фиг. 4. Управление исполнительным механизмом может быть осуществлено с помощью электроэнергии, энергии сжатого воздуха, химической энергии или энергии другого известного типа. После передачи команды объекту или исполнительному механизму способ 400 переходит на этап 412.
На этапе 412 способа 400 определяют ошибку между желаемой траекторией исполнительного механизма или объекта и действительной траекторией исполнительного механизма или объекта. В частности, траекторию объекта вычитают из желаемой траектории для получения ошибки. После определения ошибки способ 400 переходит на этап 414.
На этапе 414 способа 400 выполняют адаптацию входных элементов и вершин справочной таблицы для улучшения инверсной и псевдоинверсной кусочно-билинейной модели, которая была представлена в виде справочной таблицы. Справочная таблица может быть использована посредством последовательного алгоритма обучения в режиме реального времени и интерполяции между входными элементами и вершинами справочной таблицы на основе билинейной интерполяции.
Упрощенная модель объекта может быть выражена как y=p(u), где y - выходной сигнал, а u - управляющий входной сигнал. Инверсия может быть выражена как u=p-1(y), при условии, что объект является обратимым. Инверсная модель для упреждающего регулятора в FEL может быть выражена как , где r является желаемым выходным сигналом yd, при этом является . Упреждающий регулятор в данном примере имеет два входных сигнала y и , и один выходной сигнал uff. Также упреждающий контроллер в данном примере содержит псевдоинверсную модель, так как объект обычно не является обратимым до тех пор, пока его относительная степень не будет равна нулю.
Параметры упреждающего регулирования запоминаются, что позволяет минимизировать индекс производительности, описанный выражением:

где uff - упреждающий выходной сигнал, u0 - идеальный упреждающий выходной сигнал управления, где , а V - матрица вершин. Кусочно-билинейное представление упреждающего регулятора:

Производная от I может быть выражена следующим образом:

Переменная I может быть последовательно минимизирована с помощью ее производной; однако ошибка (uff-u0) не доступна, поскольку u0 не известно. Вместо этого выходной сигнал ufb упреждающего контроллера может быть использован вместо (uff-u0). Производная от I теперь имеет следующий вид:

Последовательное обучение осуществляется по следующему алгоритму:

где δ является регулируемым параметром для скорости адаптивного обучения. Если обучение прошло успешно, Vnew=Vold, а ufb равняется нулю. Параметр модели, который относится к каждой вершине области, обновляется следующим образом:

Переменные Vnew и Vold относятся к значениям четырех вершин области. Таким образом, частная производная от uff по каждому из вершин имеет следующий вид:

Когда кусочно-билинейная модель является двухмерной, упреждающий выходной сигнал приобретает следующий вид:
uff=(1-α)(1-β)V(σ,τ)+(1-α)βV(σ,τ+1)+α(1-β)V(σ+1,τ)+αβV(σ+1,τ+1)
Каждое значение uff интерполируется между значениями четырех вершин, определяющих область. Расчет частичных производных приобретает вид:
∇p-1=((1-α){1-β),(1-α)β,α(1-β),αβ)
Изменение в каждой вершине области приобретает вид:
Vnew(σ,τ)=Vold(σ,τ)-δ(1-α)(1-β)ufb
Vnew(σ+τ+1)=Vold(σ,τ+1)-δ(1-α)βufb
Vnew(σ+1,τ)=Vold(σ+1,τ)-δα(1-β)ufb
Vnew(σ+1,τ+1)=Vold(σ+1,τ+1)-δβufb
В данном случае упреждающие значения и вершины справочной таблицы корректируют на основании выходного сигнала от контроллера с обратной связью. Способ 400 переходит на этап 416 после корректировки справочной таблицы.
На этапе 414 способа 400 определяют, является ли выходной сигнал контроллера с обратной связью практически равным нулю в заданном диапазоне в зависимости от управляемого объекта. Например, если управляющая команда управляемого объекта находится в диапазоне -100 и 100, способ 400 может определить, что выходной сигнал контроллера с обратной связью находится в заданном значении от нуля, когда выходной сигнал контроллера с обратной связью находится между -2 и 2. Если в способе 400 будет определено, что вход контроллера с обратной связью практически равен нулю, то ответ будет положительным, после чего способ 400 завершится. В противном случае в способе 400 будет получен отрицательный ответ, и будут использованы текущие значения справочной таблицы. Следует отметить, что, если объект управления работает при относительно устойчивых условиях, а выходной сигнал регулятора с обратной связью находится в заданном диапазоне от нуля, то способ 400 может завершиться, а также может использовать другие области в справочной таблице при изменении условий работы объекта. Кроме того, контроллер с обратной связью может продолжить работу так, чтобы при изменении условий система могла быть переведена обратно на желаемую контрольную точку. Справочные таблицы могут быть адаптированы, если выходной сигнал регулятора с обратной связью отклоняется от нуля или от заданного диапазона относительно нуля.
Таким образом, в соответствии со способом управления системой по фиг. 4 формируют псевдоинверсную кусочно-билинейную модель объекта управления; адаптируют псевдоинверсную кусочно-билинейную модель на основании выходного сигнала регулятора с обратной связью; настраивают работу исполнительного механизма согласно псевдоинверсной кусочно-билинейной модели. Способ содержит этапы, на которых псевдоинверсную кусочно-билинейную модель реализуют с помощью справочной таблицы и в которых объект управления представляет собой исполнительный механизм. Способ содержит этап, на котором псевдоинверсная кусочно-билинейная модель представляет собой приближенную инверсию необратимой модели объекта управления.
Способ предусматривает регулирование нескольких исполнительных механизмов, которые управляют крутящим моментом двигателя. Способ содержит этап, на котором исполнительный механизм регулировки крутящего момента двигателя представляет собой один или несколько из нижеперечисленных механизмов: исполнительный механизм распределительного вала, исполнительный механизм дросселя, исполнительный механизм перепускной заслонки, регулятор зажигания или топливную форсунку. Способ предусматривает регулирование скорости транспортного средства с помощью нескольких исполнительных механизмов. Способ предусматривает этап, на котором исполнительный механизм скорости представляет собой один или несколько из нижеперечисленных механизмов: тормозной привод транспортного средства или исполнительный механизм дросселя. Также способ предусматривает этап, на котором исполнительный механизм представляет собой исполнительный механизм перепускной заслонки турбонагнетателя.
Способ по фиг. 4 также может быть использован для управления системой и в соответствии со способом формируют кусочно-билинейную модель объекта управления; адаптируют кусочно-билинейную модель на основании выходного сигнала регулятора с обратной связью; настраивают работу исполнительного механизма в соответствии с кусочно-билинейной моделью и выходного сигнала регулятора с обратной связью. Также способ предусматривает сведение управляющего выходного сигнала контроллера с обратной связью к нулю путем адаптации кусочно-билинейной модели. Способ предусматривает этап, на котором кусочно-билинейная модель представлена в виде справочной таблицы, и в которой объект управления представляет собой исполнительный механизм. Способ предусматривает этап, на котором адаптация кусочно-билинейной модели заключается в регулировке входных элементов справочной таблицы.
Способ предусматривает этап, на котором адаптация кусочно-билинейной модели заключается в регулировке одной или нескольких вершин таблицы. Способ предусматривает этап, на котором эталонная траектория является входным сигналом для кусочно-билинейной модели объекта, и в котором выходные данные кусочно-билинейной модели суммируют с выходным сигналом контроллера с обратной связью. Также способ содержит этап, на котором исполнительный механизм представляет собой тормозной привод транспортного средства. Также способ содержит этап, на котором исполнительным механизмом представляет собой исполнительный механизм системы климат-контроля.
В соответствии со способом по фиг. 4 предусмотрено управление нелинейной системой, в котором формируют кусочно-билинейную модель объекта управления; адаптируют кусочно-билинейную модель с помощью минимизации индекса производительности на основании выходного сигнала регулятора с обратной связью; настраивают работу исполнительного механизма в соответствии с кусочно-билинейной моделью и выходным сигналом регулятора с обратной связью. Способ дополнительно предусматривает передачу контроллеру с обратной связью данных о состоянии исполнительного механизма, при этом исполнительный механизм является нелинейным объектом. Также способ содержит исполнительный механизм, который представляет собой исполнительный механизм транспортного средства. Способ содержит исполнительный механизм, который представляет собой механизм передачи крутящего момента двигателя.
Специалистам в данной области техники должно быть понятно, что способ по фиг. 4 может представлять собой одну или несколько стратегий обработки, например, управление по событиям, управление по прерываниям, многозадачность, многопоточность и так далее. Также различные представленные этапы или функции могут быть выполнены в указанной последовательности или параллельно, а некоторые из них могут быть опущены. Аналогичным образом порядок управления необязательно должен сохраняться для достижения целей, отличительных признаков и преимуществ иллюстративного варианта, описанного в данном документе, поскольку он был приведен для наглядности и упрощения описания. Хотя это явно и не показано, специалистам в данной области техники должно быть понятно, что один или несколько представленных этапов, способов или функций может быть выполнен несколько раз в зависимости от конкретной используемой стратегии. Также представленные способы могут быть реализованы с помощью аппаратного и (или) программного обеспечения. Также способы могут быть сохранены в виде исполняемых инструкций на энергонезависимом запоминающем устройстве в системе по фиг. 1 и 2.
Специалистам в данной области техники будут очевидны различные возможные вариации и модификации без отступления от сущности и объема изобретения. Например, описанная технология может быть успешно реализована для двигателей с одним цилиндров, для цилиндров типов I2, I3, I4, I5, V6, V8, V10, V12 и V16, работающих на природном газе, бензине, дизельном топливе или на альтернативном топливе.
Реферат
Изобретение относится к способам управления системой транспортного средства с исполнительным механизмом, линейным или нелинейным. Сформированную псевдоинверсную кусочно-билинейную модель адаптируют на основании выходного сигнала регулятора с обратной связью для улучшения опережающего регулирования. Исполнительный механизм более точно соблюдает желаемую траекторию, улучшается работа исполнительного механизма в системе управления транспортным средством. 3 н. и 17 з.п. ф-лы, 4 ил.
Комментарии