Электронный модуль управления - RU2082016C1
Код документа: RU2082016C1
Чертежи

Описание
Изобретение относится к электронному оборудованию, предназначенному для использования в управлении работой транспортного средства, и, в частности, к электронному модулю управления, имеющему два или более двух процессоров.
Одним известным типом электронного модуля управления является дорогостоящий модуль, обеспечивающий широкий набор возможностей, в котором используется сложный микропроцессор для выполнения всех задач модуля по управлению.
Другим известным типом электронного модуля управления является дешевый модуль, предназначенный для более дешевых транспортных средств, который выполняет только некоторые из функций более дорогой версии. В этом электронном модуле управления используется более простой, а следовательно и не такой дорогой микропроцессор.
В последнее время делаются попытки обеспечить дешевый многофункциональный модуль управления. В патенте Великобритании GB-A-2 173 611 раскрыт электронный модуль управления, в котором два микропроцессора делят между собой различные его задачи, а также могут обеспечить дублирующее средство при выходе из строя одного из процессоров. Обычно, задачи делят таким образом, чтобы один из процессоров отвечал за впрыск топлива, а другой за искровое зажигание.
Проблема с таким разделением задач состоит в том, что процессоры должны обмениваться между собой большим количеством информации, и некоторые данные являются критическими по времени, что требует наличия высокоскоростной линии связи.
Кроме того, оба процессора должны выполнять как критические, так и не критические по времени операции, что усложняет их программирование и требует от обоих процессоров более высокой производительности, чем могло бы понадобиться.
Другая проблема, связанная с тем, что оба процессора соединены с множеством вспомогательных элементов, заключается в том, что для каждого из процессоров имеется одинаковая вероятность отказа, вследствие чего требуется сложная дублирующая система для обнаружения отказа одного из процессоров, и для его эффективного замещения.
Задачей настоящего изобретения является обеспечение усовершенствованного электронного модуля управления.
Согласно одному аспекту настоящего изобретения, обеспечивается электронный модуль управления для транспортного средства, содержащий первый процессор, приспособленный для вычисления потребностей двигателя в топливе и угла опережения зажигания на основе режима работы двигателя, и второй процессор, приспособленный для управления началом впрыска топлива и зажигания на основе позиции двигателя.
За счет разделения задач так, чтобы один процессор производил необходимые вычисления, а другой инициировал впрыск топлива и начало зажигания, можно существенно сократить требуемый объем обработки данных.
Другим преимуществом этого устройства является то, что при соответствующих вариантах исполнения, отпадает необходимость в обращении ко второму процессору. В результате, двигатель или специалист по калибровке, например, будет иметь дело только с одним процессором, что значительно упростит его задачу. Кроме того, это может существенно снизить стоимость модуля, поскольку для второго процессора может использоваться бортовое ПЗУ, а не дорогостоящее СППЗУ или другое подобное запоминающее устройство.
Кроме того, можно сделать так, чтобы задачи и вспомогательные элементы, которые имеют наибольшую вероятность отказа, были связаны только с первым процессором, чтобы в случае, когда предусматривается дублирующее средство, оно было выполнено только на основе второго процессора, что позволяет сравнительно просто его реализовать.
Предпочтительно, чтобы было только два процессора.
Первый процессор может быть также приспособлен для управления скоростью холостого хода двигателя.
Предпочтительно, чтобы второй процессор был приспособлен для определения распределения моментов зажигания на основе позиции двигателя и режима работы двигателя. Таким образом, второй процессор может обеспечивать управление началом зажигания, а первый процессор будет выполнять требуемые вычисления, а также функции, заданные и откалиброванные потребителем или специалистом по техобслуживанию.
Электронный модуль управления может также работать в режиме дублирования, чтобы обеспечить продолжение его работы даже при отказе первого процессора или каких-либо элементов, связанных с первым процессором. Так, в примере выполнения изобретения, электронный модуль управления содержит средства для генерации контрольного сигнала, показывающего рабочее состояние первого процессора и/или каких-либо элементов, связанных с первым процессором, при этом второй процессор приспособлен для управления работой двигателя, когда контрольный сигнал указывает отказ первого процессора и/или каких-либо элементов, связанных с первым процессором.
В практическом варианте изобретения может быть предусмотрена первая память, в которой хранятся данные о потребностях в топливе для множества скоростей двигателя, причем второй процессор приспособлен для обращения к первой памяти при отказе первого процессора и/или каких-либо элементов, связанных с ним. Кроме того, предпочтительно, чтобы имелась вторая память, содержащая данные об угле опережения зажигания для множества скоростей двигателя, причем второй процессор приспособлен для обращения и второй памяти при отказе первого процессора и/или каких-либо элементов, связанных с ним.
В предпочтительном варианте, данные о потребностях в топливе и углах опережения зажигания основаны на числе оборотов двигателя, а также нагрузке двигателя, определяемой, например, по положению дроссельной заслонки.
Первая и вторая памяти могут находиться в одной и той же физической памяти, и, предпочтительно, встроены во второй процессор.
Отказ первого процессора обычно более вероятен из-за разнообразия функций, которые он должен выполнять, и из-за элементов, с которыми он соединен.
Ниже описывается пример осуществления настоящего изобретения, который дается только для иллюстрации изобретения, со ссылкой на прилагаемые чертежи, в которых:
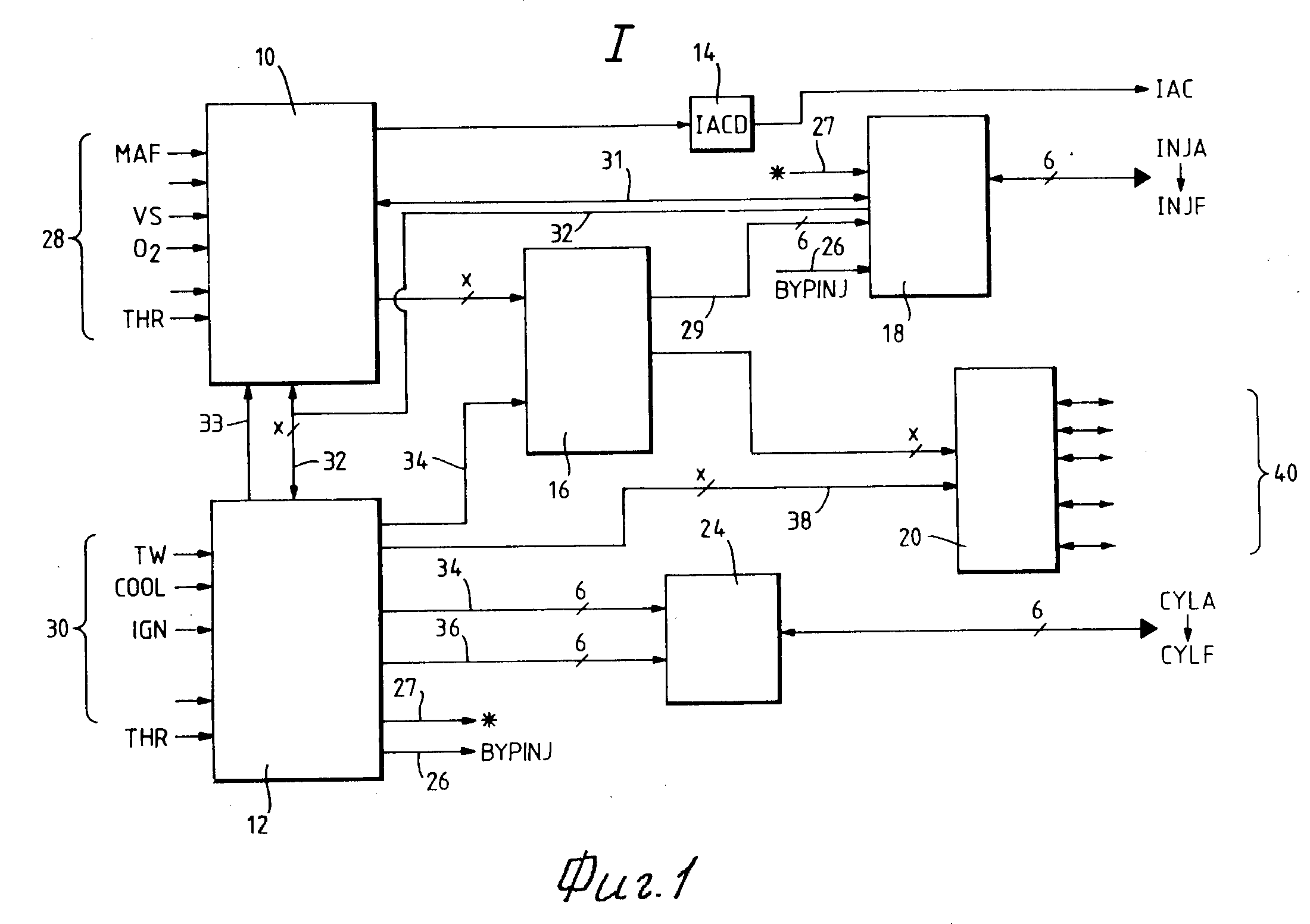
фиг. 1 блок-схема
примера выполнения электронного модуля управления, и фиг. 2 блок-схема примера выполнения драйвера форсунок электронного модуля управления с фиг. 1.
Показаны только те элементы и входные/выходные линии, которые необходимы для описания этого варианта изобретения. Другие элементы и входные/выходные линии могут относиться к хорошо известным в технике типам.
Как показано на фиг. 1, электронный модуль управления (называемый ниже ЭМУ) снабжен первым и вторым процессорами 10 и 12, соответственно, любого подходящего типа. Задачи ЭМУ разделены между первым и вторым процессорами 10, 12, так, чтобы первый процессор 10 выполнял переменные алгоритмы, например, вычисления, связанные с впрыском топлива и зажиганием, и функции, заданные потребителем, а второй процессор 12 действовал как синхронизирующее устройство и устройство ввода/вывода, получая информацию о скорости от датчика положения двигателя, такого как зубчатое колесо на коленчатом валу, и управляя началом зажигания свеч и впрыска топлива. Таким образом, при нормальном режиме работы, первый процессор 10 представляет собой ведущий процессор, который выполняет все переменные вычисления, а второй процессор 12-подчиненный процессор, который подает аппаратно генерированные синхронизирующие сигналы, полученные от одного или нескольких датчиков.
Первый процессор 10 соединен с драйвером 14 управления подачей воздуха на холостом ходу, который приспособлен для задания скорости холостого хода двигателя, и с СППЗУ (не показано), которое обеспечивает необходимый об7ем памяти для использования его первым процессором 10.
Кроме того, к первому процессору 10 подсоединен топливный и вспомогательный контроллер 16, который управляет топливными форсунками INJa-INJf через драйвер 18 форсунок. Контроллер 16 управляет также, через вспомогательный модуль 20, вспомогательными устройствами, связанными с двигателем транспортного средства, и диагностикой множества рабочих параметров двигателя.
Топливный и вспомогательный контроллер 16 подсоединен ко второму процессору 12 для приема синхронизирующего пускового сигнала, предназначенного для инициации впрыска топлива.
Второй процессор 12 соединен со свечами зажигания CYLa- CYLf через драйвер 24 зажигания. От второго процессора 12 к драйверу 18 форсунок предусмотрена также выходная линия 26, обозначенная BYPINJ для управления резервной подачей топлива в периоды, когда первый процессор 10 не работает. Подробнее это описано ниже.
Второй процессор 12 содержит встроенную память (не показана), которая включает в себя постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и СППЗУ.
Синхрогенератор (не показан) обеспечивает сигнал синхронизации частотой 2 МГц для работы первого и второго процессоров 10, 12. В другом варианте, первый процессор 10 работает на 2 МГЦ, а второй процессор 12 на 3 МГц. В случае, если микропроцессоры имеют встроенные схемы синхронизации, кристалл подходящей частоты соединяют с первым процессором 10, а синхронизирующий выход первого процессора 10 соединяют со вторым процессором 12 для использования его последним.
ЭМУ содержит ряд входов и выходов, при этом первое множество входов 28 предназначено для первого процессора 10 для подачи в него данных о различных параметрах работы двигателя от множества соответствующих датчиков хорошо известного в технике типа. Они используются для управления скоростью холостого хода двигателя, вычисления количества топлива, которое должно быть подано к каждому цилиндру, угла опережения зажигания (для чего используются данные, полученные от второго процессора 12), управления вспомогательными функциями и процедурами диагностики транспортного средства. Для первого процессора могут быть предусмотрены также другие стандартные входы.
Из показанных входов, MAF сигнал от датчика массового расхода воздуха, используемый для управления, главным образом, количеством топлива, подаваемого к цилиндрам, и углом опережения зажигания. TRANS-сигнал от контроллера коробки, передач, который указывает, что крутящий момент двигателя слишком велик для коробки передач, в результате чего первый процессор 10 посылает команду снизить нагрузку на коробку передач (за счет снижения подачи топлива или уменьшения угла опережения зажигания), то тех пор, пока сигнал TRANS не покажет, что двигатель вновь работает в приемлемых пределах. Сигнал TRANS особенно полезен для автоматических коробок передач при переключениях с одного передаточного числа на другое.
Сигнал VS показывает скорость транспортного средства, а О2 является сигналом от кислородного датчика и показывает содержание кислорода в выхлопе. Может быть предусмотрено множество таких кислородных датчиков для измерения содержания кислорода в множестве различных точек выхлопной трубы. DIAG сигнал, который переводит электронный модуль управления в режим диагностики для осуществления известным образом ряда диагностических тестов транспортного средства.
Сигнал THR показывает положение дроссельной заслонки и используется для определения нагрузки двигателя при вычислении потребностей в топливе и угла опережения зажигания. Помимо положения дроссельной заслонки, для определения нагрузки могут использоваться другие хорошо известные в технике показатели.
Первый процессор 10 имеет также доступ ко входам и выходам вспомогательного модуля 20, главные из которых показаны на фиг. 1. К ним относятся линия CHK ENG, которая обычно соединена с лампочкой, которая зажигается для информации водителя о том, что в двигателе имеется серьезная неполадка. Линия FAN RELAY используется для приведения в действие и для проверки состояния реле, вентилятора, а линия FUEL PUMR используется для приведения в действие, и для проверки состояния топливного насоса. Линия CONS используется для индикации потребления топлива, линия TRANS OUT используется для сообщения контроллеру коробки передач ожидаемой нагрузки, которая будет оказана на коробку передач в последующих циклах двигателя, с тем чтобы контроллер мог заранее предупредить ЗМУ о том, что коробка передач будет перегружена.
Другие описанные входные сигналы ЭМУ поступают ко второму процессору 12 и показаны как второй набор входов 30. К этим входам относятся сигнал TW от зубчатого колеса, установленного на коленчатом валу двигателя, предназначенный для индикации позиции двигателя и числа его оборотов для использования в управлении моментами зажигания и началом впрыска топлива. Сигнал COOL генерируется датчиком температуры, предназначенным для измерения температуры охлаждающей среды двигателя и, тем самым, для индикации нагрузки двигателя, и используется первым процессором 10 при вычислении потребностей в топливе и угла опережения зажигания. Этот сигнал может использоваться также для выключения двигателя, когда температура превышает заданный уровень. САМ -сигнал от датчика положения распределительного вала.
Вход IGN напряжение зажигания автомобиля. Он может использоваться для автоматического отключения некоторых функций ЭМУ, если напряжение аккумулятора падает ниже заданного уровня. Например, он может использоваться для отключения драйвера 14 управления подачей воздуха на холостом ходу и средства кондиционирования воздуха, а также для подачи соответствующего предупреждения водителю. Отключение драйвера 14 управления подачей воздуха на холостом ходу легко осуществляется путем смены сигнала на разрешающей линии (не показана) связывающей второй процессор 12 и драйвер 14. В предпочтительном варианте, величина скорости холостого хода, на которую был установлен драйвер 14 непосредственно перед тем, как быть отключенным вторым процессором 12, сохраняется для использования ее в качестве заданной скорости холостого хода при таких условиях.
Как будет ясно ниже, линии FAN RELAY и FUEL RUMR относятся к вспомогательному модулю 20 и управляются вторым процессором 12 с тем, чтобы они могли работать в режиме дублирования.
Драйвер 14 управления подачей воздуха на холостом ходу является единственным элементом управления двигателем, который управляется непосредственно первым процессором 10. Другие элементы управления двигателем, такие как топливные форсунки или свечи зажигания, которые требуют точных синхронизирующих пусковых сигналов, управляются не непосредственно первым процессором 10, а топливным и вспомогательным контроллером 16 и вторым процессором 12.
Множество сигналов 30, поступающих на вход второго процессора 12, подается к первому процессору 10 для использования при вычислении потребностей в топливе и угла опережения зажигания. Это обеспечивается с помощью ряда линий связи 32, которые связывают два процессора 10, 12, а также первый процессор 10 и драйвер 18 форсунок. На практике, линии 32 связи представляют собой последовательную шину данных, которая управляется исключительно первым процессором 10.
Передача данных между двумя процессорами 10, 12 осуществляется с помощью двух буферных запоминающих устройств, каждое из которых связано с соответствующим процессором. По мере того, как первый процессор 10 выдает данные, он подает в свою буферную память, в заданном порядке, данные об угле опережения зажигания и сигнал СОР, показывающий рабочее состояние первого процессора 10 и элементов, связанных с ним. С другой стороны, по мере того, как второй процессор 12 получает данные, он передает в свою буферную память, в заданном порядке, данные о температуре охлаждающей среды COOL, напряжении зажигания IGN и данные о рабочем состоянии свечей зажигания, полученные из сигнала от драйвера 24 зажигания, а также сигнал на отключение подачи топлива, когда установлено, что впрыскивать топливо в цилиндр нежелательно.
Управление передачей данных осуществляется таким образом, что когда первый процессор 10 считает нужным послать или получить данные, он посылает элемент данных в вершине своей буферной памяти во второй процессор 12, который автоматически помещает элемент данных в вершину своей буферной памяти. Благодаря тому, что все данные передаются между двумя процессорами в заданном порядке, нет необходимости в квитировании установления связи, поскольку оба процессора знают, какую информацию они получают. Кроме того, поскольку данные, передаваемые между двумя процессорами, не включают в себя синхронизирующих пусковых сигналов, данные могут передаваться по усмотрению первого процессора 10.
В случае отказа первого процессора 10 и/или элементов, связанных с ним, можно запереть линии 32 связи на основе состояния контрольного сигнала COP, посылаемого от первого процессора 10 ко второму процессору 12 по линиям связи 32. Это позволяет второму процессору 12 управлять работой двигателя в режиме дублирования, как будет описано ниже.
Синхронизирующий сигнал, представляющий сигнал TW положения колеса на коленчатом валу, посылается от второго процессора 12 к первому процессору 10 по отдельной линии 33 для сохранения простоты структуры линий связи между двумя процессорами 10, 12. Этот синхронизирующий сигнал используется первым процессором 10 для вычисления числа оборотов двигателя которое затем используется для определения потребностей в топливе и угла опережения зажигания.
Основные элементы драйвера 18 форсунок показаны в форме блоков на фиг.2. Блок 50 драйвера форсунок соединен с каждой из топливных форсунок INJa-InjF и приспособлен для приведения их в действие. Блок 52 диагностики приспособлен для определения рабочего состояния топливных форсунок INJa-JNJf и для генерации соответствующего сигнала о неправильной работе одной или нескольких форсунок. Дублирующий переключатель 54 управляется линией 27 ошибки, помеченной звездочкой, для переключения драйвера 50 форсунок на отклик только на сигнал BYPINJ при работе в режиме дублирования или на сигнал от асинхронного, синхронного блока 56 подачи топлива, который соединен как с линиями 29 от топливного и вспомогательного контролера 16, так и с линией 31 через асинхронный регистр 62. При нормальной работе асинхронный/синхронный блок 56 подачи топлива установлен на нормальный режим работы и получает данные от топливного и вспомогательного контроллера 16, а в режиме дублирования он установлен на работу в режиме дублирования (BYPINJ) и соединен со вторым процессором 12 через линию 26.
Последовательный блок 58 данных соединен линиями связи 32 с первым процессором 10 для получения команды из регистра управления от первого процессора 10, используемой для управления асинхронным регистром, соединенным с асинхронной линией 31 управления подачей топлива от первого процессора 10. Эта линия 31 используется первым процессором 10 для подачи импульса оптимальной подачей топлива в виде модулированного по ширине импульса для использования с целью увеличения выходной мощности двигателя в ответ на запрос дроссельной заслонки или другой запрос загрузки. Для того, чтобы убедиться, что желаемое увеличение действительно имеет место, последовательный блок 58 данных приспособлен для возвращения первому процессору 10 сигнала, указывающего, был ли использован весь сигнал увеличения подачи топлива как импульс на подачу топлива или же часть или весь этот сигнал был забит стандартным импульсом на подачу топлива, посланным топливным и вспомогательным контроллером 16, вследствие чего желаемого увеличения выходной мощности двигателя не произошло.
Блок 60 отключения подачи топлива управляется вторым процессором 10 и временно отключает драйвер 18 форсунок, когда установлено, что желательно прекратить подачу топлива к одному или нескольким цилиндрам. Однако, в предпочтительном и описываемом варианте изобретения этот блок не входит в состав драйвера 18 форсунок. Вместо него, ответственным за команды на отключение подачи топлива является первый процессор 10, который делает это на основе сигнала 33 от второго процессора 12.
Драйвер 18 форсунок ответственен также за контроль работы форсунок INJa-INJf и за подачу данных о рабочем состоянии к первому процессору 10 по линии 31. Благодаря этому, если в работе форсунки имеются неполадки, первый процессор может предпринять соответствующие действия.
При нормальном режиме работы двигателя транспортного средства, первый процессор 10 вычисляет количество топлива, которое нужно подать к каждому цилиндру, на основе, главным образом, числа оборотов двигателя (вычисленного на основе опорного сигнала, поступающего по линии 33), массового расхода воздуха MAF, температуры охлаждающей среды COOL, позиции дроссельной заслонки THR и количества кислорода O2, измеренного кислородным датчиком. Результаты вычислений передаются затем по параллельной шине под управлением первого процессора 10 к топливному и вспомогательному контроллеру 16.
Топливный и вспомогательный контроллер 16 регулирует затем фактический промежуток времени, в течение которого работают форсунки, посылая соответствующие сигналы по линиям 29 к драйверу 18 форсунок.
В течение каждого рабочего цикла двигателя первый процессор 10 вычисляет также желательную величину угла опережения зажигания на основе числа оборотов двигателя, определяемого по сигналу, посылаемому по линии 33, сигналам MAF, COOL, IGN и другим хорошо известным в технике показателям. Затем он посылает по линии 32 результат этих вычислений ко второму процессору 12 для зажигания свечей. Когда двигатель работает на холостом ходу, первый процессор 10 регулирует количество воздуха, подаваемого в цилиндры, через драйвер 14 управления подачей воздуха на холостом ходу.
Кроме того, в соответствующие моменты при работе транспортного средства первый процессор 10 управляет вспомогательным модулем 20 для проведения диагностических тестов, обеспечиваемых ЭМУ, известным в технике образом.
С другой стороны, второй процессор 12 выполняет функции базового запуска или синхронизации для ЭМУ. Он включает и управляет началом зажигания (в момент, определенный первым процессором 10) и распределением моментов зажигания на основе позиции двигателя и числа оборотов, подаваемых сигналом TW от коленчатого вала.
Работа свечей зажигания контролируется драйвером 24 зажигания, который посылает сигналы обратной связи от каждой из свеч зажигания ко второму процессору 12.
Второй процессор 12 управляет также началом впрыска топлива, посылая по линии 34 соответствующий сигнал разрешения подачи топлива (полученный из сигнала TW от колеса на коленчатом валу и сигнала CAM от распределительного вала) к топливному и вспомогательному контроллеру 16. Однако, в случае, когда установлено, что нежелательно включать какую-либо топливную форсунку, второй процессор 12 может послать сигнал запрещения подачи топлива к первому процессору 10 по линиям связи 32.
Второй процессор 12 управляет также включением драйвера 14 подачи воздуха на холостом ходу с помощью отдельной линии (не показана), таким образом, чтобы в режиме дублирования, или когда напряжение IGN зажигания слишком низко, драйвер 14 подачи воздуха на холостом ходу отключался.
Второй процессор 12 мог бы также посылать разрешающий сигнал к первому процессору 10 в тех вариантах изобретения, где разрешающая линия контроллера 14 соединена с первым процессором 10.
В дополнение к вышеописанным функциям запуска, второй процессор 12 обеспечивает дублирующие сигналы подачи топлива и зажигания при отказе первого процессора 10 и/или каких-либо элементов, связанных с ним. Наличие такого отказа определяется по тому, что второй процессор 12 не получает контрольного сигнала COP от первого процессора 10, или полученный сигнал COP искажен или другим образом указывает на необходимость переключения ЭМУ в режим дублирования. В этом случае первый процессор 10 и топливный и вспомогательный контроллер 16 отключается с помощью сигнала, выдаваемого по линии 27 ошибки, и второй процессор 12 запускает затем дублирующую программу, которая управляет распределением моментов зажигания и подачей топлива.
В этой программе дублирования второй процессор 12 отключает также драйвер 14 управления подачей воздуха на холостом ходу, с тем, чтобы число оборотов на холостом ходу, на которое был установлен драйвер 14 непосредственно перед его отключением, использовалось затем как число оборотов холостого хода во время работы в режиме дублирования.
Линия 27 ошибки предназначена также для отключения вспомогательного модуля 20, кроме линий CHK ENG, FAN RELAY и FUEL PUMR к которым второй процессор 12 обращается через три вспомогательные линии 38. В этом режиме, линия CHK ENG устанавливается во включенное состояние по умолчанию первого процессора 10 или топливного и вспомогательного контроллера 16 для использования в подсветке, например, соответствующего символа на панели приборов транспортного средства для предупреждения водителя о том, что в работе двигателя имеются неполадки. Конечно, можно использовать и любой другой индикатор неисправности, в том числе звуковой сигнал. В данном варианте изобретения второй процессор 12 будет также отдавать команду на подачу сигнала неисправности по линии CHK ENG, если установлено, что произошел отказ топливного насоса и/или реле вентилятора, даже при работе ЭМУ в нормальном режиме (в этом случае это делается через первый процессор 10).
Одновременно, линия 27 ошибки устанавливает драйвер 18 форсунок в режим дублирования для получения дублирующих импульсов на подачу топлива от второго процессора 12, посылаемых по линии 26 (BYPINJ).
Второй процессор 12 определяет распределение моментов зажигания на основе величины угла опережения зажигания, полученной из просмотровой таблицы, хранящейся в памяти второго процессора 12, в зависимости от числа оборотов двигателя, определенного по сигналам TW от колеса на коленчатом валу. Просмотровая таблица может быть трехмерной, требующей также знания величины нагрузки двигателя, определяемой, например, по сигналу THR позиции дроссельной заслонки. В некоторых вариантах изобретения угол опережения зажигания может также изменяться в зависимости от сигнала COOL температуры охлаждающей среды.
В предпочтительном варианте изобретения, опережение зажигания определено на основе их величин, соответствующих применению топлива с октановым числом 91. Эти величины дают сравнительно небольшое опережение зажигания, благодаря чему дублирующее управление может быть сравнительно прямым и надежным.
Подача топлива в режиме дублирования регулируется на основе сигналов числа оборотов двигателя, температуры охлаждающей среды COOL и позиции дроссельной заслонки THR, которые используются для получения величины количества топлива, подлежащему впрыску, из второй просмотровой таблицы, хранящейся в памяти второго процессора 12.
В предпочтительном варианте изобретения, для упрощения режима дублирования, топливо в нем подается ко всем цилиндрам одновременно.
Второй процессор 12 может, таким образом, помочь двигателю "доковылять до дома" при отказе от первого процессора 10 или части ЭМУ и поддержать управляемость транспортного средства.
Разделение задач между первым и вторым процессорами 10, 12 вышеописанным образом, как правило, позволяет второму процессору 12 регулировать детонацию в двигателе. Это можно обеспечить с помощью одного или нескольких датчиков детонации, соединенных со вторым процессором 12, который использует сигнал от датчика (датчиков) для регулирования угла опережения зажигания, полученного от первого процессора 10. Такое регулирование детонации могло бы осуществляться так, чтобы управлять каждым цилиндром по отдельности или, в более простой системе, сразу всеми цилиндрами, таким образом, чтобы величины углов опережения зажигания для всех цилиндров корректировались на одинаковую величину.
Кроме того, это разделение задач позволяет сделать так, чтобы первый процессор 10 был единственным процессором, к которому должен обращаться специалист по калибровке, при этом второй процессор будет эффективно скрыт внутри ЭМУ. Поскольку задачи первого процессора 10 как правило не критичны по времени, это еще более упрощает задачи регулировки, выполняемые специалистом по калибровке, равно как и перепрограммирование, связанное с усовершенствованием или другими изменениями в ЭМУ.
Реферат
Использование: двигатели внутреннего сгорания транспортных средств. Сущность изобретения: электронный модуль управления содержит первый процессор 10, приспособленный для вычисления потребностей двигателя в топливе и угла опережения зажигания, а также для управления множеством диагностических тестов для контроля рабочих параметров двигателя. Второй процессор 12 управляет зажиганием и распределением моментов зажигания, а также началом впрыска топлива. За счет такого разделения задач, имея дешевый электронный модуль управления, можно обеспечить широкий набор возможностей. Второй процессор 12 приспособлен для управления двигателем в режиме дублирования при отказе первого процессора 10, путем использования просмотровых таблиц для ширины импульса подачи топлива и опережения зажигания. Благодаря этому, автомобиль остается управляемым даже при отказе части электронного модуля управления. 6 з.п. ф-лы, 2 ил.
Комментарии