Катетер с комбинированным устройством для определения положения и измерения давления - RU2648871C2
Код документа: RU2648871C2
Чертежи


Описание
ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Изобретение относится к катетерам, а именно к катетерам с возможностью определения местоположения или ориентации и давления.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых диагностических и терапевтических процедурах используется катетер, подведенный к сердечной камере и контактирующий с внутренней сердечной стенкой. В этих процедурах самое важное, чтобы дистальный конец катетера контактировал с эндокардом при достаточным давлении для обеспечения хорошего контакта. Чрезмерное усилие тем не менее может привести к нежелательному повреждению тканей сердца и даже прободению сердечной стенки.
Например, для интракардиальной радиочастотной (РЧ) абляции катетер, имеющий электрод на своем дистальном конце, проводится через сосудистую систему пациента в камеру сердца. Электрод контактирует с участком или участками эндокарда и определяет электрическую активность камеры сердца. Тем самым РЧ-энергия поступает к электроду через катетер для абляции ткани сердца на участке. Для выполнения необходимой диагностической функции и достижения терапевтического эффекта катетера необходим достаточный контакт между электродом и эндокардом.
Катетеры для картирования или абляции обычно имеют один или более датчиков положения для создания сигнала, который обычно используется для определения положения дистального участка катетера. Для этих целей используются генераторы магнитного поля для создания его вблизи от пациента. Как правило, генераторы поля представляют собой катушки, находящиеся вне тела пациента и размещенные ниже туловища пациента в строго определенных местах. Эти катушки производят магнитные поля, которые определяются магнитным датчиком положения, расположенным на катетере. Датчик производит электрические сигналы, которые поступают в процессор сигнала через кабели, проходящие по катетеру.
Для определения давления катетер обычно несет миниатюрную передающую катушку и три измерительные, расположенные на противоположных частях гибкого дистального участка. Передающая катушка сонаправлена продольной оси катетера, так же, как и три измерительные катушки, но последние находятся на равных расстояниях от передающей катушки и в равноудаленных радиальных положениях от продольной оси катетера. Миниатюрная передающая катушка производит магнитное поле, определяемое тремя измерительными катушками, которые создают сигналы в зависимости от перемещения оси и изменения величины угла между противоположными частями дистального отдела катетера.
Оси измерительных катушек параллельны оси катетера (и соответственно друг другу, когда шарнир не отклонен). Следовательно, измерительные катушки настроены для передачи сильного сигнала в ответ на поле, произведенное миниатюрным генератором поля. Сигналы могут сильно разниться в зависимости от расстояний между катушками. Отклонение угла дистального участка, на котором расположен миниатюрный генератор поля, приводит к дифференциальному изменению сигналов, исходящих из измерительных катушек, в зависимости от направления и величины отклонения, так как одна или две катушки расположены относительно близко к генератору поля. Компрессионное перемещение дистального участка ведет к усилению сигналов от всех трех измерительных катушек. Предшествующая сверка отношения между давлением на дистальном участке и движением шарнира может быть использована процессором для пересчета сигнала катушек в величину давления. Из-за комбинированного измерения перемещения и изгиба датчики определяют давление правильно вне зависимости от того, контактирует электрод с эндокардом прямо или под углом.
Стандартный катетер, определяющий положение и давление, может быть оборудован шестью кабелями, по одному для каждой из трех катушек для измерения положения и для каждой из трех катушек для измерения давления, при этом каждый кабель представляет собой витую пару. Кабели являются дорогостоящими, а их производство и установка трудоемкими. К тому же кабели занимают ограниченное пространство внутри конца катетера и обладают сомнительной надежностью. Уменьшение количества кабелей, используемых в катетере, приводит к некоторым преимуществам, включая уменьшение времени для производства катетеров, увеличение выпуска катетеров и снижение стоимости производства.
Следовательно, желательно создать катетер с комбинированными или упрощенными возможностями для определения давления и положения со сниженным количеством измерительных катушек и, следовательно, количеством кабелей измерительных катушек.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Изобретение представлено для катетера, взаимодействующего с внутренними и внешними генераторами магнитных полей для производства позиционных данных о положении катетера в виде измерения величины магнитных полей и данных о давлении, оказываемом на дистальный конец катетера, прикрепленный к ткани с уменьшенным количеством измерительных катушек и, следовательно, с уменьшенным количеством кабелей измерительных катушек для снижения обрывов кабеля и выхода из строя.
В одном из вариантов катетер включает дистальный отдел, адаптированный для контакта с тканью пациента, включающий проксимальный участок, дистальный участок и подвижный шарнир. Каждый проксимальный или дистальный участок оборудован внутренним генератором магнитного поля, и противоположный проксимальный или дистальный участок снабжен несколькими измерительными катушками, взаимно перпендикулярными друг другу, способными получать как сигналы от внутреннего генератора магнитного поля, отвечающие за давление на дистальный отдел, так и данные о положении дистального отдела, производимые несколькими наружными генераторами магнитного поля, управляемыми системой катетеризации. Каждая катушка имеет специальный кабель, предназначенный для передачи данных о давлении, а также о положении сигнальному процессору системы катетеризации.
В одном варианте реализации подвижный шарнир включает упругий элемент, обеспечивающий смещение оси и изменение угла между проксимальным и дистальным участками дистального отдела.
В одном варианте реализации катетер имеет три или менее измерительные катушки с тремя или менее кабелями, каждый из которых предает сигналы между измерительной катушкой и соответствующим сигнальным процессором.
В одном варианте измерительная катушка содержит два эллиптических датчика и один цилиндрический (т.е. более длинный и узкий) датчик. В более подробном варианте внутренний генератор поля совмещен с осью Z, один эллиптический датчик совмещен с осью X, другой эллиптический датчик совмещен с осью Y и цилиндрический датчик совмещен с осью Z.
В одном варианте каждое магнитное поле отличается частотой, фазой или временем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие особенности и преимущества изобретения будут более понятными на примере следующего подробного описания в сочетании с сопроводительными чертежами.
Фиг. 1 является схематической картинкой, иллюстрирующей медицинскую систему реализации изобретения, основанную на катетере.
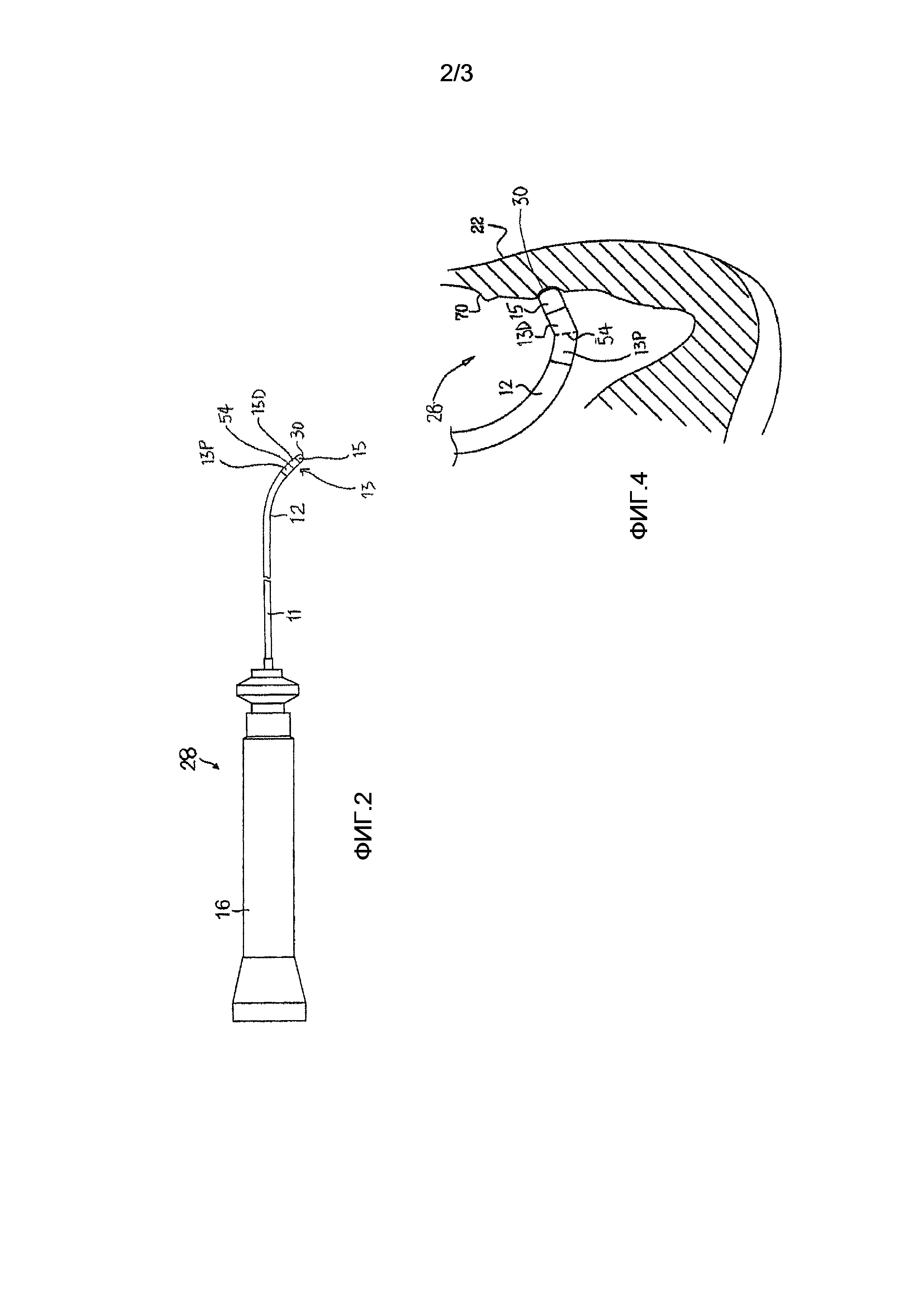
Фиг. 2 - вид сбоку катетера для использования с системой на фиг. 1 в соответствии с реализацией изобретения.
Фиг. 3 - схема деталей дистального отдела катетера с фиг. 2 в разрезе.
Фиг. 4 - схематический вид, на котором показан дистальный отдел с фиг. 3 в контакте с тканью эндокарда.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение предназначено для системы катетеризации сердца, имеющей катетер с измерительным узлом, который получает сигналы, соответствующие как положению катетера, так и давлению на его дистальный отдел при контакте с тканью. Подобно узлам для измерения давления и положения измерительный узел катетера желательно оборудовать уменьшенным количеством измерительных катушек, что соответственно ведет к упрощению структуры катетера, уменьшающему риск повреждения или обрыва кабелей.
Фиг. 1 - схематическая иллюстрация стандартной системы 20 для катетеризации сердца, используемая сейчас. Система 20 может основываться, например, на системе CARTO.TM, производимой Biosense Webster inc. (Diamond Bar, Calif.). Данная система содержит инвазивный зонд, имеющий форму катетера 28, и панель управления 34. В варианте осуществления, описанном ниже в настоящем документе, предполагается, что катетер 28 используется для абляции ткани эндокарда известным на данный момент способом. Также, произведя соответствующие изменения, катетер можно использовать для других терапевтических или диагностических целей в сердце или других органах тела. Как показано на фиг. 2, катетер 28 состоит из продолговатого корпуса 11, отклоняемой промежуточной секции 12, дистальной секции 13 с хотя бы одним концевым электродом 15 на ее дистальном конце 30 и ручки управления 16.
Оператор 26, например, кардиолог, вставляет катетер 28 через сосуд пациента 24 так, чтобы дистальная секция 13 катетера вошла в сердечную камеру 22 пациента. Оператор продвигает катетер до контакта дистального конца 30 катетера с тканью эндокарда 70 в установленном месте или местах. Катетер 28 своим проксимальным концом подключен соответствующим образом к консоли 34. Консоль может включать в себя радиочастотный (РЧ) генератор, который подает высокочастотную электрическую энергию через катетер для абляции ткани сердца в местах контакта с дистальной секцией 13. Альтернативно или дополнительно катетер и система могут быть настроены для проведения других известных терапевтических и диагностических процедур.
Консоль 34 использует определение магнитного поля для получения данных о (i) положении дистальной секции 13 в сердце, (ii) отклонении оси и изменении угла в зависимости от давления, произведенного при контакте с тканью эндокарда 70. Для получения данных о положении или координатах пусковая цепь 38 консоли 34 включает наружные генераторы магнитного поля, например F1, F2 и F3, для производства магнитного поля вблизи тела пациента 24 и устанавливает наружную систему координат. Генераторы F1, F2 и F3 оснащены катушками, которые расположены снаружи под туловищем пациента в известных положениях. Эти катушки производят магнитные поля в человеческом теле в объеме сердца 22.
Для получения данных о давлении, включая отклонение оси и изменение угла дистальной секции 13 катетера 28, пусковая цепь 38 консоли 34 запускает внутренний миниатюрный генератор магнитного поля МП, расположенный на дистальном отделе 13D конца 13, как показано на фиг. 3. В известном варианте генератор поля МП содержит катушку, ось которой совпадает с осью Z, определяющей продольную ось 25 катетера.
В соответствии с фиг. 1 и 3 измерительный датчик 17 в дистальном отделе 13 катетера 128 высокочувствителен как к генераторам поля F1, F2 и F3, так и к миниатюрному генератору поля МП. Таким образом, измерительный узел 17 производит электрические сигналы в зависимости от магнитных полей, произведенных генераторами поля F1, F2 и F3 и миниатюрным генератором поля МП.
Для определения и измерения давления дистальный отдел 13 имеет проксимальный участок 13P и дистальный участок 13D, соединенные друг с другом гибким и эластичным шарниром 54, который может производиться из любого подходящего материала с достаточными гибкостью и прочностью. Эластичный шарнир 54 позволяет ограниченное количество движений между участками 13P и 13D в зависимости от сил, действующих на дистальный отдел 13. Эти силы возникают, когда дистальный конец 30 давит на эндокард в процессе абляции. Как показано на фиг. 4, дистальный конец 30 катетера 28 контактирует с эндокардом 70 сердца 22 в соответствии с реализацией изобретения. Сила, оказываемая дистальным концом 30 на эндокард, немного деформирует ткань эндокарда, поэтому концевой электрод 15 контактирует с тканью на относительно большой поверхности. Так как электрод контактирует с эндокардом под углом чаще, чем прямо, дистальный участок 13D изгибается в шарнире 54 относительно проксимального участка 13P. Изгиб способствует оптимальному контакту 15 с тканью эндокарда 70.
Как показано на фиг. 3, шарнир 54 включает наружный патрубок 56, которым может служить наружная часть 55 дистальной секции 13, сделанная из гибкого изолирующего материала, такого как Celcon.RTM., Teflon.RTM или жаростойкий полиуретан. Патрубок 56 может быть также сделан из материала, специально предназначенного для свободного изгибания или сжатия сустава. (Этот материал в разрезе показан на фиг. 3 для демонстрации внутренней структуры катетера.) Дистальный участок 13D обычно относительно жесткий в сравнении с оставшейся частью катетера.
Шарнир 54 также содержит упругий соединительный элемент 60 в виде пружины или полого элемента из эластичного материала с винтовой резьбой по всей длине. Например, упругий элемент может содержать такие полимеры, как силикон, полиуретан или другие пластики, или сверхэластичный сплав, такой как титан с никелем (нитинол). Винтовая резьба обеспечивает сходимость полого элемента с пружиной при действии, оказываемом на дистальный участок 13D. Информация по производству и характеристика этого вида упругого элемента представлены более подробно в патенте США сер. номер 12/134592 от 6 июня 2008 г., который описывает данное устройство и доступен по ссылкам. Альтернативно упругий элемент может содержать любой подходящий вид эластичного компонента с требуемыми характеристиками гибкости и прочности.
Жесткость упругого элемента 60 определяет уровень относительного движения между дистальными участками 13P и 13D в ответ на силы, воздействующие на дистальный участок 13D. Эти силы возникают, когда дистальный конец 30 давит на эндокард во время процедуры картирования или абляции. Желаемое давление между дистальным участком 13D и эндокардом для обеспечения хорошего электрического контакта должно быть порядка 20-30 г. Упругий элемент 60 спроектирован с возможностью перемещения оси (т.е. латерального движения от продольной оси 25 катетера 28) и углового отклонения дистального участка 13D в соответствии с давлением на дистальный конец 30. Измерение отклонения и перемещения указывает на давление и поэтому помогает обеспечивать правильное давление во время абляции.
Узел измерения магнитного поля 17 расположен на дистальном участке 113Р, как показано на фиг. 3. В показанном варианте устройства датчик 17 включает в себя три миниатюрные измерительные катушки SCx, SCy и SCz с воздушной намоткой. Катушки имеют взаимно перпендикулярные оси, катушка SCz совпадает с продольной осью 25 катетера, именуемой Z, катушка SCx совпадает с осью Х, и катушка SCy совпадает с осью Y в системе координат (X, Y, Z). Три катушки расположены в том же осевом сечении под разными углами относительно оси катетера или оси Z, где осевая плоскость определяется как плоскость, перпендикулярная продольной оси катетера или Z, и описанное осевое сечение содержит две осевые плоскости катетера. Например, три катушки могут быть расположены на азимуте 120° на одном радиальном расстоянии от оси. Три катушки SCi, которые могут быть сочетанием датчиков давления и положения, описаны в патенте США № 6 690 963 и публикации № 20090138007, см. ссылку для получения дальнейших подробностей. В показанном варианте устройства измерительная катушка SCz настроена как датчик положения, а измерительные катушки SCx и SCy настроены как датчики давления.
Электромагнитные или магнитные поля передаются между генераторами поля F1, F2, F3, расположенными под туловищем пациента и измерительными катушками SCz, SCx и SCy, расположенными в катетере 28 для определения положения катетера. Магнитные поля, созданные генераторами поля F1, F2, F3, приводят к созданию электрических сигналов катушками SCz, SCy и SCx с амплитудами, которые показывают расположение измерительного узла 17 относительно системы координат генераторов поля F1, F2 и F3. В одном из вариантов три генератора поля F1, F2 и F3, производящие магнитное поле, состоят из трех разно ориентированных составляющих поля. Каждая из этих составляющих поля определяет любую измерительную катушку SCz, SCx и SCy, каждая из которых продуцирует сигнал, состоящий из трех компонентов.
Как показано на фиг. 1, консоль 34 включает сигнальный процессор 36, который обрабатывает эти сигналы для определения координат положения дистального отдела 13, обычно включающих координаты как расположения, так и ориентации. Способ определения положения осуществлен в вышеуказанной системе CARTО и описан в деталях в патентах США № 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, в публикации патента WO 96/05768 и в опубликованных патентных заявках 2002/0065455 A1, 2003/0120150 A1 и 2004/0068178 A1, которые доступны по приведенным ссылкам.
Для определения и измерения давления, оказываемого на дистальный отдел 13D, дополнительное электромагнитное или магнитное поле передается генератором поля МП и определяется измерительными катушками SCz, SCx и SCy, расположенными на проксимальном участке 13D дистального отдела 13. Смещение оси или угловое отклонение дистального участка 13D относительно проксимальной части 13Р приводит к дифференциальному росту сигнала от катушек SCz, SCx и SCy в зависимости от направления и магнитуды отклонения, поскольку одна или две эти катушки становятся ближе к генератору поля МП. Компрессионное смещение дистального участка 13D вызывает повышение сигнала для каждой из катушек SCz, SCx и SCy. Изменения в измерении магнитного поля генератором МП приводят к созданию катушками SCz, SCx и SCy электрических сигналов с амплитудами, показывающими смещение оси или угловое отклонение.
Понятно, что, если катушки SCx и SCy параллельны и не совпадают с осью миниатюрного генератора поля МП, величина магнитного диполя вокруг генератора поля МП определяется параллельными катушками SСх и SCy. В то время как катушки SCx и SCy могут считывать относительно слабое магнитное поле от генератора поля МП в сравнении с катушкой SCz, потому что их относительная ориентация направлена на генератор поля МП, это обеспечивает достаточную чувствительность для определения и измерения давления, оказываемого на дистальный отдел 13. Более того, сигнальный процессор 36 может быть откалиброван для компенсации этого несоответствия подготовленным специалистом.
Поскольку катушка генератора МП на дистальном участке 13D радиально симметрична, она подходит для определения продольной оси 25 катетера. Тем не менее понятно, что, если катушка отклоняется от оси, это изменение нарушит взаимную перпендикулярность датчиков SCx, SCy и SCz.
Также понятно, что катушки датчиков SCx, SCy и SCz могут быть любого желаемого размера и формы для обеспечения закрепления по направлению дистального отдела 13 или для взаимной перпендикулярности. Принято, что датчики давления в основном бывают цилиндрическими (длинными и узкими), так как соответствуют направлению оси Z генератора поля МП дистальной секции, в то время как датчики положения Х и Y обычно бывают эллиптической формы для обеспечения взаимной перпендикулярности с датчиком положения Z и удобства размещения в дистальном отделе. В описанном варианте устройства датчик SCz имеет цилиндрическую форму и является датчиком давления, в то время как датчики SCx и SCy эллипсовидные и являются датчиками положения.
Как показано на фиг. 3, кабель 62 проходит между катушкой SCz и сигнальным процессором 36 для передачи сигналов от катушки SCz сигнальному процессору. Кабель 63 проходит между катушкой SCx и сигнальным процессором 36 для передачи сигналов от катушки SCx сигнальному процессору. Кабель 64 проходит между катушкой SCy и сигнальным процессором 36 для передачи сигналов от катушки SCy сигнальному процессору.
Соответственно катетер 28 имеет три кабеля 62, 63 и 64 для определения положения и давления в сравнении с обычным катетером, имеющим пять или шесть кабелей для определения положения и давления. Каждый кабель является дорогостоящим в производстве, и его установка в катетер трудоемкая. К тому же кабели занимают ограниченное место в катетере. Кабели к тому же склонны к поломке. Имеющий уменьшенное количество датчиков и соответственно кабелей, катетер 28 дает некоторые преимущества, включающие уменьшение времени производства катетера, увеличение выпуска катетеров и снижение себестоимости.
Магнитные поля, производимые каждым из генераторов F1, F2, F3 и МП, отличаются по некоторым параметрам, включая частоту, фазу или время, а сигналы, производимые каждой из измерительных катушек для измерения магнитного поля, полученного от этих различных магнитных полей, таким же образом различны. Частота, фаза или время задаются, как требуется. Например, генератор поля МП для определения давления может производить сигналы на частотах между 16 и 25 кГц, в то время как генераторы поля положения F1, F2 и F3 работают на разных частотах.
Сигнальный процессор 36 обрабатывает эти сигналы для получения данных (i) о позиционных координатах дистального отдела 13, обычно включающих координаты положения и ориентации, и данных (ii) осевого смещения и углового отклонения дистального отдела 13. Сигнальный процессор 36 может содержать универсальный компьютер с соответствующим интерфейсом для получения данных от катетера 28 и управления другими компонентами консоли 34. Для осуществления описанных в настоящем документе функций процессор может быть снабжен специальным программным обеспечением. Программу можно загрузить на панель управления 34 в электронном виде по сети или с носителей, например, оптических, магнитных или электронных устройств памяти. В другом варианте реализации изобретения некоторые или все функции процессора 36 осуществляются специализированными или программируемыми компонентами цифровых аппаратных средств. Основываясь на сигналах, полученных от катетера и других компонентов системы 20, процессор 36 передает на дисплей 42 оператору 26 визуальную информацию о положении дистального конца 30 в теле пациента, включая осевое смещение и угловое отклонение дистального конца катетера, а также информацию о статусе и направлении проводимой процедуры.
Процессор 36 получает эти сигналы по кабелям 62, 63 и 64, проходящим через катетер 28, и обрабатывает их для определения положения и ориентации дистального отдела 13 в заданной системе координат и определения информации о давлении, включая осевое смещение и угловое отклонение дистального отдела. Расположение катушек SCz, SCy и SCx и давление, оказываемое на дистальный участок 13D дистального отдела 13, могут быть рассчитаны по характеристикам обнаруженного катушками поля, таким как сила и направление. К тому же генераторы поля F1, F2, F3 и МП и измерительные катушки SCz, SCx и SCy вместе составляют несколько пар «передатчик/приемник», таких как (F1/SCz), (F1/SCx), (F1/SCy), (F2/SCz), (F2/SCx), (F2/SCy), (F3/SCz), (F3/SCx), (F3/SCy), (MП/SCz), (MП/SCx) и (MП/SCy). Каждая такая пара содержит один генератор поля и катушку как элементы пары, и каждая катушка отличается от других положением или ориентацией. С помощью определения свойств поля, передаваемого между элементами пары, система может находить информацию о расположении дистального отдела 13 в наружной системе координат, задаваемой генераторами поля F1, F2 и F3, а также информацию о давлении на дистальный отдел МП, измеряемом с помощью магнитного поля, создаваемого МП. Информация о положении может включать положение дистального отдела 13 или ориентацию дистального отдела 13. Специалисту очевидно, что для расчета положения генераторы поля F1, F2 и F3 должны быть расположены в определенном положении и ориентации относительно друг друга, а для расчета давления, основанного на осевом смещении и угловом отклонении, генератор поля МП и измерительные катушки SCz, SCx и SCy должны быть расположены в известном положении и ориентации относительно друг друга.
Создающие поля катушки F1, F2, F3 являются одним из типов магнитных передатчиков, которые могут быть использованы в вариантах изобретения. «Магнитный передатчик» в контексте данной патентной заявки и формулы изобретения - это устройство, производящее магнитное поле в ответ на подаваемое электричество или передающее электрический сигнал в ответ на передаваемое магнитное поле. Даже несмотря на то, что в данной реализации магнитными передатчиками служат катушки, можно использовать другие известные типы магнитных передатчиков.
В дополнение к вышеописанным в качестве измерительных узлов могут быть использованы катушки другой формы. Например, положения генератора поля МП и катушек SCz, SCx и SCy могут быть обратными, и генератор поля МП будет находиться в проксимальном участке 13D, проксимальнее шарнира 54, а измерительные катушки будут располагаться в дистальном участке 13D. В другом варианте катушки SCz, SCx и SCy могут использоваться как генераторы поля (используя разделение времени или частоты для отличия полей), в то время как генераторная катушка МП будет служить измерителем. Размеры и формы передающих и измерительных катушек, показанные на фиг. 3, являются одним из возможных вариантов, можно использовать большее или меньшее количество катушек в разных положениях, но узел должен содержать хотя бы две катушки в различных радиальных положениях для измерения отклонения шарнира.
Предшествующее описание имеет ссылку на конкретные примеры вариантов осуществления изобретения. Специалистам в области техники и технологии, к которой принадлежит изобретение, будет понятно, что описанная конструкция допускает модификации и изменения, не нарушающие принципы и сущность изобретения и не выходящие за его рамки. Необходимо понимать, что чертежи не обязательно сводить к определенному масштабу. Таким образом, предшествующее описание не следует толковать как относящееся только к конкретным конструкциям, раскрытым и представленным на сопроводительных чертежах. Предшествующее описание скорее согласуется и подкрепляет нижеизложенную формулу изобретения, отражающую полный объем изобретения.
Реферат
Изобретение относится к медицинской технике, а именно к устройствам определения положения и измерения давления. Катетер для использования с системой катетеризации, имеющей множество генераторов магнитного поля, каждый из которых генерирует магнитное поле данных положения, содержит гибкий патрубок, дистальный отдел, адаптированный для контакта с тканью пациента, который содержит проксимальный участок, дистальный участок и гибкий шарнир между проксимальным участком и дистальным участком, генератор магнитного поля дистального отдела, расположенный в одном из проксимального и дистального участков, причем генератор магнитного поля дистального отдела выполнен с возможностью генерации магнитного поля и его пересчета в данные давления, множество измерительных катушек, расположенных в другом из проксимального и дистального участков, причем по меньшей мере одна измерительная катушка из множества измерительных катушек выполнена в виде датчика положения, и по меньшей мере одна другая из измерительных катушек из множества измерительных катушек выполнена в виде датчика давления, причем по меньшей мере одна измерительная катушка из множества измерительных катушек выполнена с возможностью измерения каждого магнитного поля и его пересчета в данные положения и каждого магнитного поля и его пересчета в данные давления и с возможностью генерации сигналов, представляющих данные, относящиеся к положению дистального отдела, и данные, относящиеся к давлению, оказываемому на дистальный отдел при контакте с тканью пациента, причем по меньшей мере одна измерительная катушка из множества измерительных катушек имеет соответствующий кабель, присоединенный к ней, выполненный с возможностью передачи сигналов для обработки сигналов. Во втором варианте выполнения катетер содержит по меньшей мере три взаимно перпендикулярные измерительные катушки, расположенные на проксимальном участке, причем по меньшей мере одна из по меньшей мере трех взаимно перпендикулярных измерительных катушек выполнена в виде датчика давления, и по меньшей мере одна другая из по меньшей мере трех взаимно перпендикулярных измерительных катушек выполнена в виде датчика положения, причем каждая из по меньшей мере трех взаимно перпендикулярных измерительных катушек выполнена с возможностью определения каждого магнитного поля и его пересчета в данные положения и каждого магнитного поля и его пересчета в данные давления и создания сигналов, представляющих данные, относящиеся к положению дистального отдела, и данные, относящиеся к давлению, оказываемому на дистальный отдел при контакте с тканью пациента, причем каждая из по меньшей мере трех взаимно перпендикулярных измерительных катушек имеет соответствующий кабель, присоединенный к ней, выполненный с возможностью передачи сигналов для обработки сигналов. Использование изобретения обеспечивает расширение арсенала средств для определения положения и измерения давления с помощью катетера. 2 н. и 18 з.п. ф-лы, 4 ил.
Комментарии