Управление частотой вращения двигателя в машине - RU2499153C2
Код документа: RU2499153C2
Чертежи
Описание
Область техники
Настоящее изобретение в основном относится к управлению выходной мощностью двигателя, приводящего в движение машину, например, к управлению выходной мощностью двигателя машины с гидроприводом.
Уровень техники
В технике известны устройства управления мощностью машин с гидроприводом, например, гусеничных тракторов, гусеничных погрузчиков, экскаваторов и тому подобного. Также известны устройства управления мощностью для управления гусеничным ходом, пневматическими колесами. Создание движущей силы также как и маневрирование машинами известно в уровне техники. Например, из US 5967756 известно устройство для управления электрогидравлической системой машины, имеющей двигатель, который приводит насос переменного рабочего объема. Гидравлическая система работает с помощью двигателя, приводящего в движение гидронасос и гидромотор. В основном используются насосы переменного рабочего объема. Гидравлические двигатели могут приводить множество рабочих элементов, которые могут включать в себя систему приводов, дисковые пилы, рыхлители и другие типы рабочих элементов. Например, рабочие элементы подобные механическим лопатам, которые могут быть полезными при выполнении большого числа разнообразных задач, например, прокладки трубопровода, массовой выемки грунта, рытья котлованов, заготовки леса и других работ, могут быть управляемы гидравлическими двигателями, приводимыми в движение гидравлической энергией гидросистемы.
При эксплуатации рабочих органов, таких, например, как дисковые пилы, разрыхлители и тому подобное, потребности в гидравлической энергии могут быть высокими. Однако, когда рабочие органы не находятся в работе, потребности в гидравлической энергии снижаются, требуя при этом пониженной входной мощности от двигателя.
В US 5967756, насос переменного рабочего объема используется для управления гидравлическим потоком в гидравлической системе, таким образом, обеспечивая возможность реагирования на изменение потребностей в мощности. Кроме того, настройка числа оборотов двигателя осуществляется для обеспечения работы двигателя с заданной скоростью вращения, чтобы подавать заданную мощность в гидравлическую систему. Сигнал, характеризующий число оборотов двигателя и сигнал, характеризующий объемную подачу насоса, сравниваются, и вычисляются оптимальные параметры для частоты вращения двигателя и рабочего объема насоса.
Двигатель, известный как первичный двигатель, передает энергию гидравлической системе посредством гидравлического насоса. Подача энергии в гидросистему должна быть регулируема в зависимости от скорости гидромотора, вращающего момента, мощности и направления вращения. В гидравлической системе насос, связанный с двигателем, создает гидравлический поток, для того чтобы приводить в движение гидромотор, связанный с рабочим органом, который представляет собой нагрузку, т.е., силовую передачу системы приводов. В случае если рабочий объем насоса или гидромотора является постоянным, входная мощность от двигателя просто передается к нагрузке. При использовании насоса переменного рабочего объема возможен постоянный вращающий момент. Вращающий момент гидромотора является константой в любом интервале, потому что вращающий момент зависит от давления текучей среды и рабочего объема гидромотора. Увеличение или уменьшение рабочего объема насоса увеличивает или уменьшает соответственно обороты гидромотора, тогда как вращающий момент остается практически постоянным. Поэтому мощность гидромотора возрастает с увеличением рабочего объема насоса.
Кроме того, можно использовать гидромотор переменного рабочего объема с насосом постоянного рабочего объема. Такая конструкция является передачей с постоянной мощностью. Если поток на входе в гидромотор постоянный, а рабочий объем гидромотора варьируется, чтобы сохранять произведение скорости и вращающего момента постоянной, подаваемая мощность постоянна. Уменьшение рабочего объема гидромотора увеличивает обороты гидромотора, но уменьшает вращающий момент. Такая комбинация может сохранять постоянную мощность на гидромоторе.
Комбинирование насосов переменного рабочего объема и гидромоторов переменного рабочего объема в гидравлической системе также возможно и допускает варьирование вращающего момента также как и мощности в гидромоторе.
Обеспечение передачи достаточной мощности от двигателя к гидравлической системе необходимо во всех сферах применения. Желательно передавать требуемую мощность. Кроме того, желательно поддерживать входную мощность настолько низкой, насколько это возможно. Настоящее изобретение направлено на преодоление некоторых или всех недостатков, связанных с известным уровнем техники.
Краткое изложение сущности изобретения
В соответствии с одним объектом изобретения предложено устройство для управления двигателем. Средства управления могут управлять выходной мощностью двигателя для привода машины. Средства детектирования могут идентифицировать режим обратного движения упомянутой машины. Средства управления могут быть использованы для управления выходной мощностью двигателя в зависимости от наличия режима обратного движения.
В соответствии с другим объектом изобретения предложена машина, снабженная управляемым двигателем. Рабочая машина может включать в себя средства управления выходной мощностью двигателя. Рабочая машина, кроме того, может включать в себя средства детектирования для идентифицирования режима обратного движения. Также рабочая машина может включать в себя средства управления, предназначенные для управления выходной мощностью двигателя в ответ на идентифицирование режима обратного движения.
В соответствии со следующим объектом изобретения раскрыта рабочая машина, включающая в себя управление выходной мощностью первичного двигателя. Рабочая машина может включать в себя средства управления для управления выходной мощностью первичного двигателя. Рабочая машина кроме того может включать в себя средства детектирования для идентификации режима ее обратного движения. Средства управления также могут быть установлены для настройки выходной мощности упомянутого первичного двигателя в ответ на идентификацию упомянутого режима обратного движения.
В соответствии с еще одним объектом изобретения раскрыт способ управления двигателем. Способ может включать в себя управление выходной мощностью двигателя, приводящего машину. Способ может включать в себя идентифицирование режима обратного движения упомянутой машины. Также способ может включать в себя уменьшение выходной мощности упомянутого двигателя в ответ на идентифицирование упомянутого режима обратного движения.
Другие признаки и объекты этого раскрытия станут очевидными из следующего описания и сопровождающих его чертежей.
Краткое описание чертежей
Для лучшего понимания настоящего устройства можно обратиться к сопровождающим чертежам, на которых:
на фиг.1 показана блок-схема гидравлической системы управления рабочей машины;
на фиг.2 показана блок-схема системы определения настройки заданных чисел оборотов двигателя;
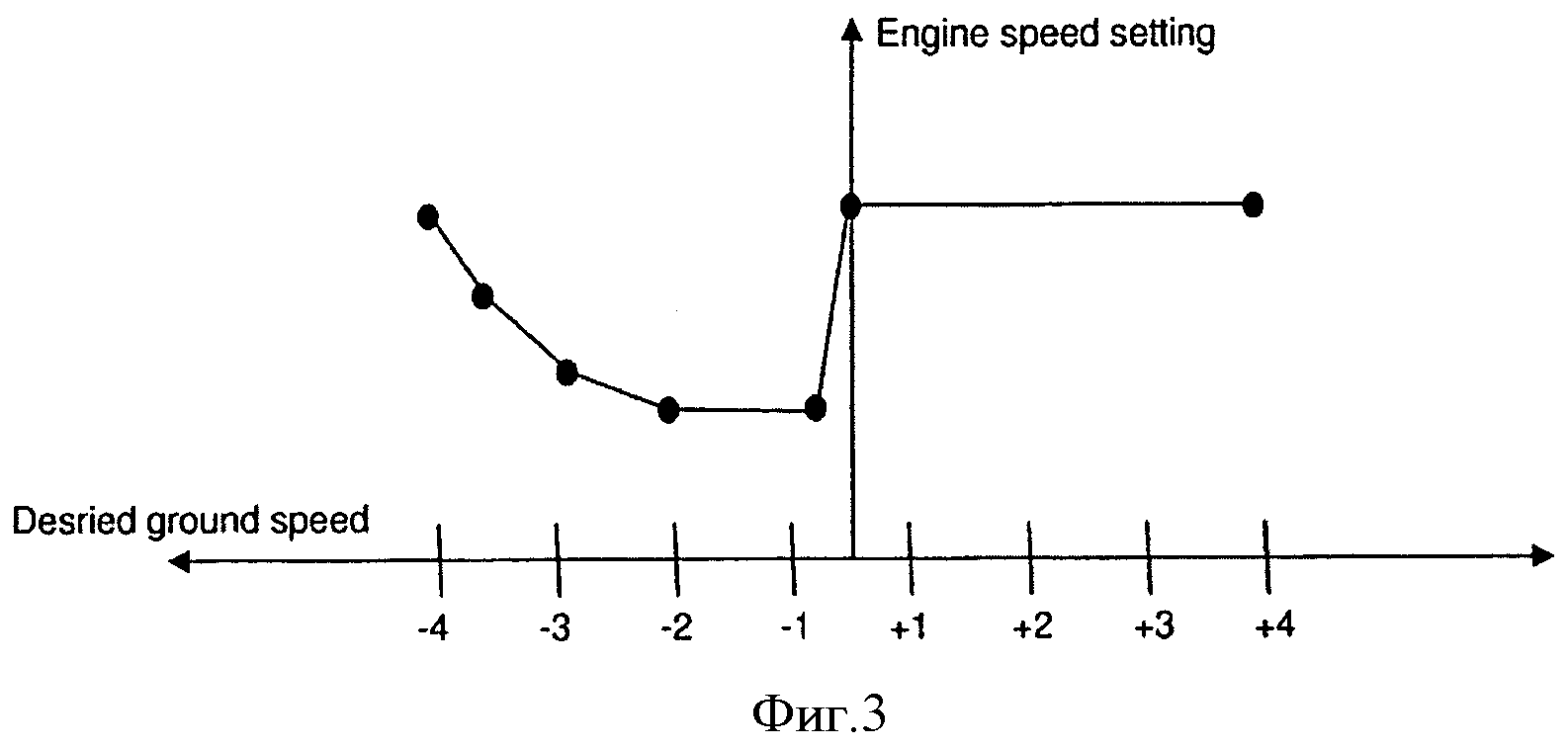
на фиг.3 показан график настройки заданного числа оборотов двигателя в функции заданной настройки путевой скорости;
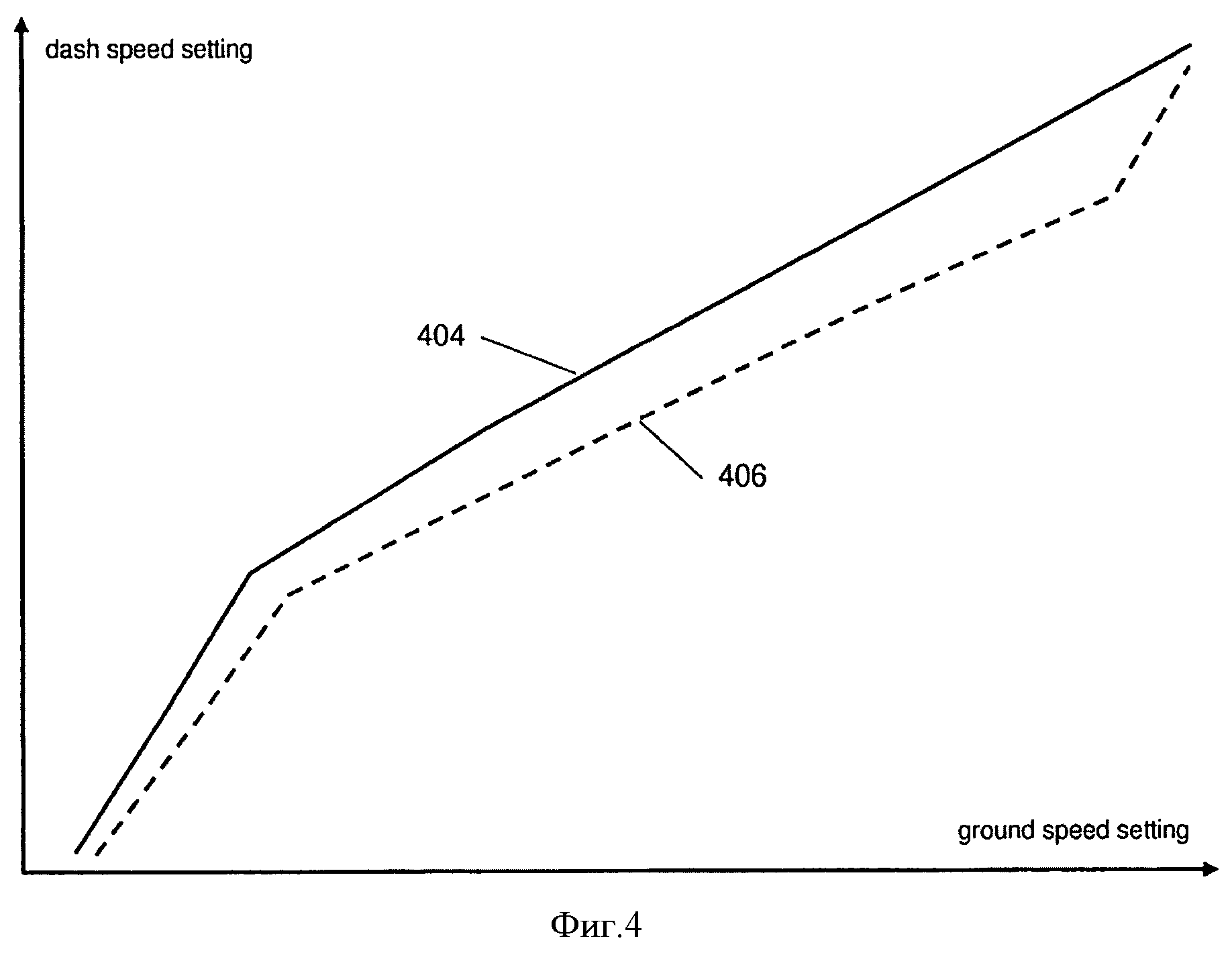
на фиг.4 показан график настройки числа оборотов в функции заданной настройки путевой скорости;
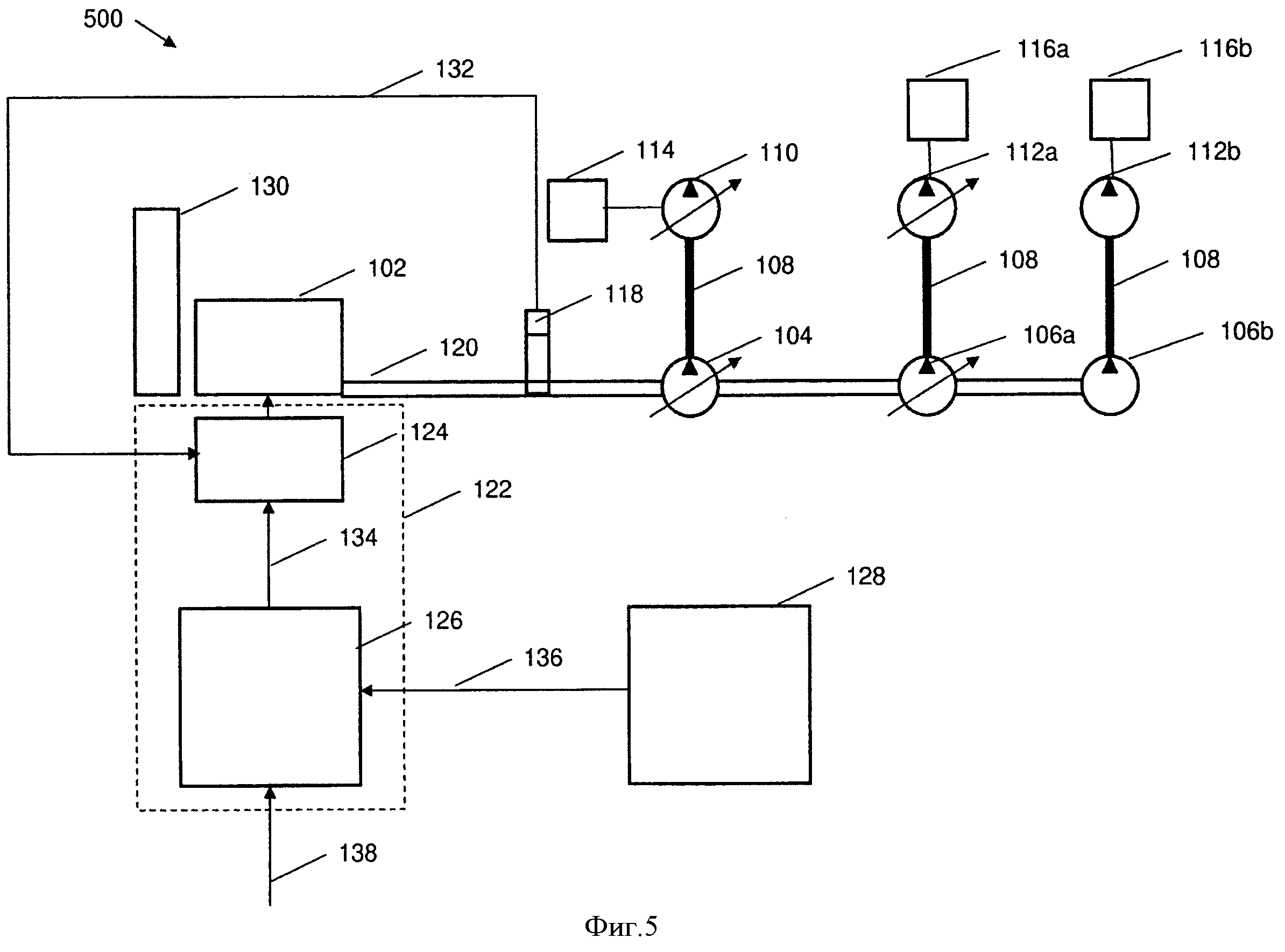
на фиг.5 показана блок-схема другой гидравлической системы управления для рабочей машины;
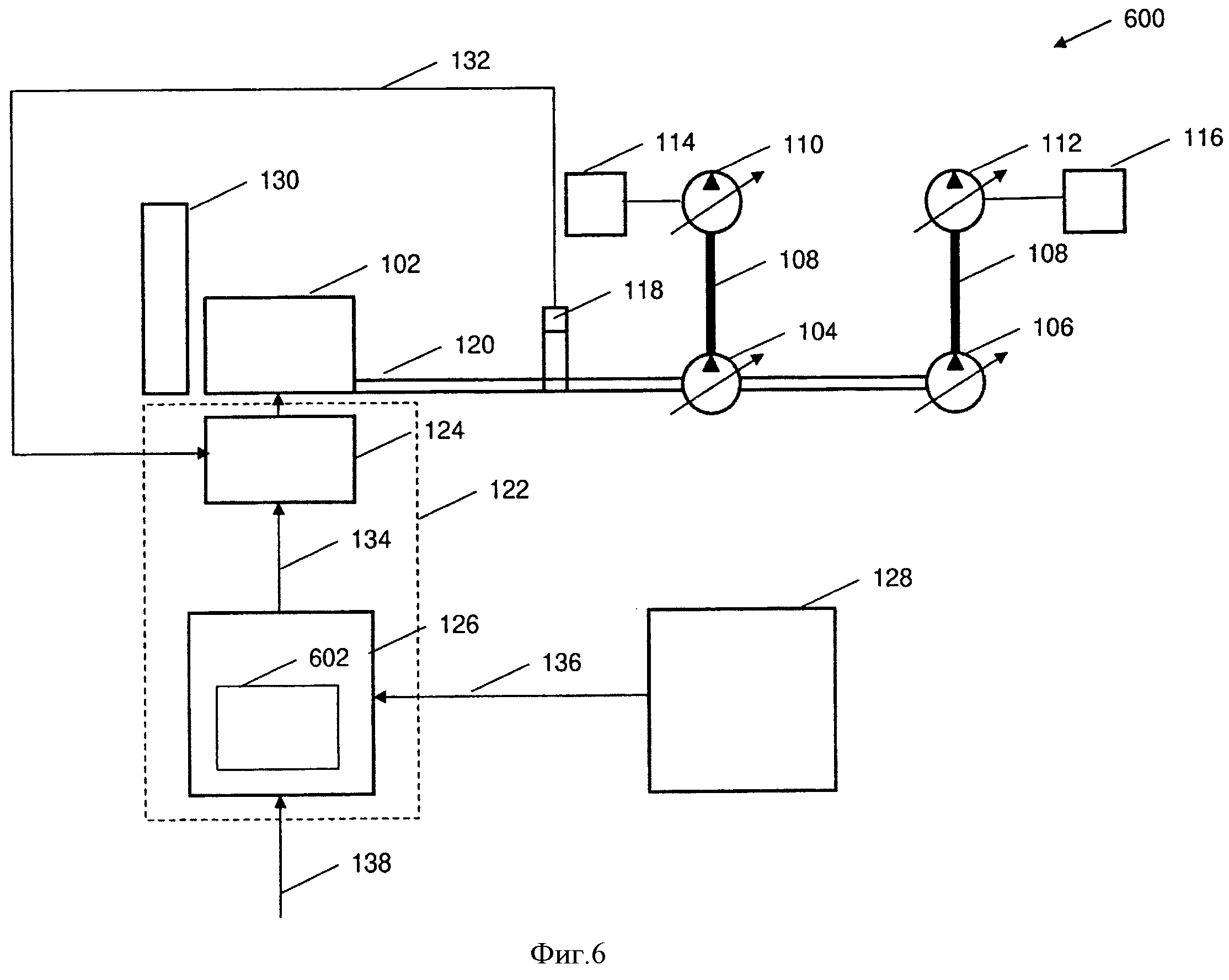
на фиг.6 показана также блок-схема еще одной гидравлической системы управления для рабочей машины;
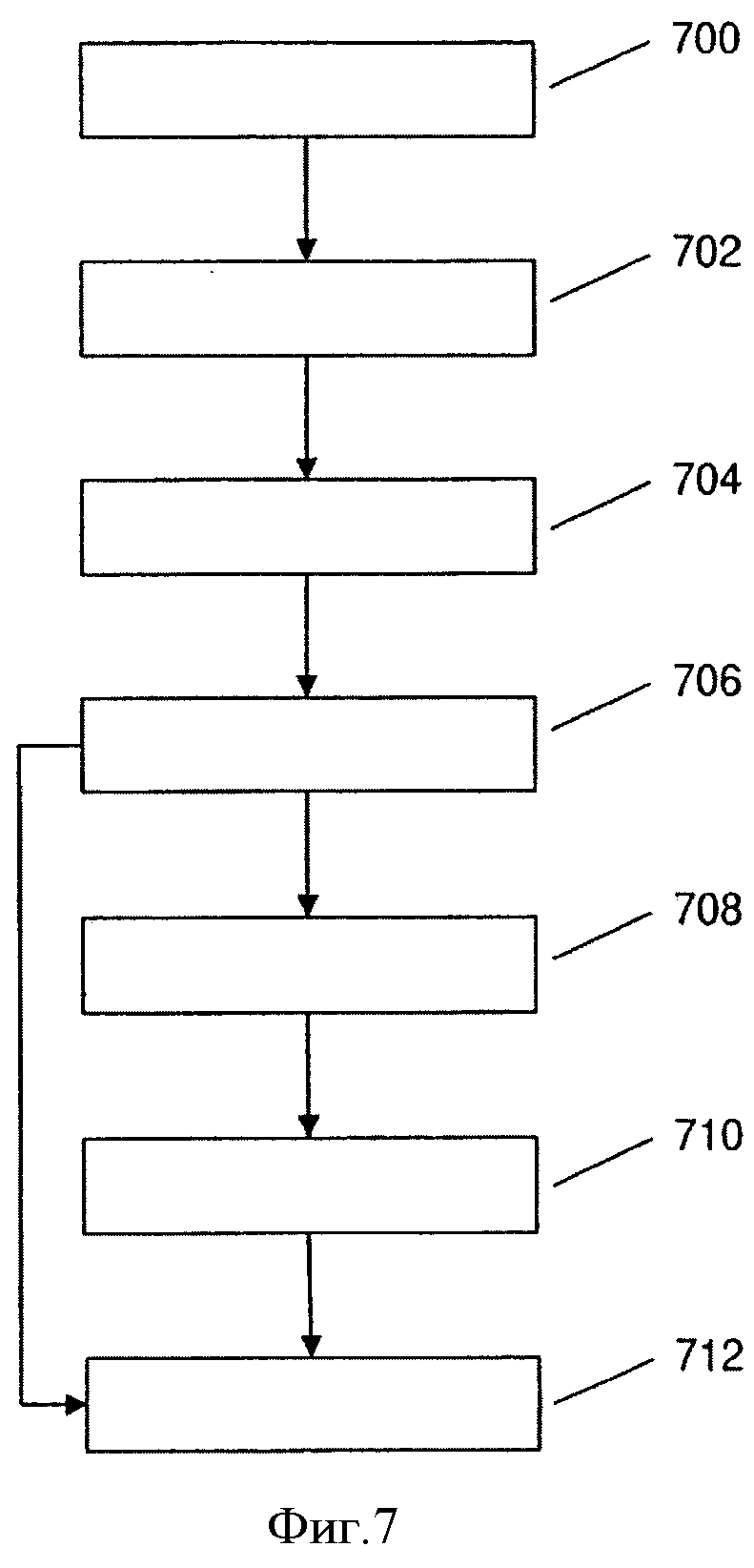
на фиг.7 показана функциональная схема работы рабочей машины согласно вариантам осуществления.
Подробное описание
Настоящее изобретение предлагает алгоритм управления первичным двигателем рабочей машины, при котором число оборотов двигателя понижается, когда рабочая машина реверсируется. Это обеспечивает повышение экономичности двигателя и снижение шума в режиме реверса. Было установлено, что во время обратного участка рабочего цикла машины необходима пониженная мощность гидравлической системы. Рабочие органы машины, которые приводятся в действие гидравлической системой, главным образом используются в прямом ходе рабочей машины. В обратном ходе рабочие органы зачастую не работают или имеют пониженную активность. Иными словами в режиме реверса машины рабочим органам не требуется полная мощность, реализуемая гидравлической системой
Входная мощность гидравлической системы, передаваемая двигателем, может быть снижена в режиме реверса. Уменьшение входной мощности может быть получено снижением числа оборотов двигателя, приводящего в движение гидравлические насосы. Управление двигателем также как и ниже описанное зависимость настройки путевой скорости от настройки числа оборотов двигателя, и зависимость настройки максимального числа оборотов от настройки путевой скорости может быть осуществлено в соответствии с конкретными задачами. Можно активизировать алгоритм управления, задаваемый пользователем.
Описанный алгоритм управления обеспечивает снижение потребления топлива, так как было установлено, что рабочие машины могут работать в режиме реверса от 20 до 40% полного времени работы. При условии 37% времени использования режима реверса, потребление топлива может быть снижено до 4%. Алгоритм управления, как будет описан в дальнейшем, позволяет сократить потребление топлива.
Обратимся к фиг.1, на которой приведена блок-схема гидравлической системы 100 машины в соответствии с изобретением. Гидравлическая система 100 может использоваться в любом типе гидравлически или электро-гидравлически управляемой машины, например, в гусеничных тракторах, в гусеничных погрузчиках, экскаваторах или тому подобном. Гидравлическая система 100 содержит двигатель 102. Двигатель 102 может быть, например, двигателем внутреннего сгорания, гибридным дизель-электрическим двигателем или двигателем с электроприводом, гелиотермическим двигателем, двигателем на топливных элементах или тому подобное. Двигатель 102 является первичным двигателем.
Двигатель 102 приводит в действие один или более гидронасосов 104, 106. Насосы 104, 106 могут быть насосами переменного рабочего объема или насосами постоянного рабочего объема. Насосы 104, 106 подают текучую среду по трубопроводам 108 высокого давления к гидромоторам 110, 112. Гидромоторы 110, 112 могут быть гидромоторами переменного рабочего объема или гидромоторами постоянного рабочего объема.
Насосы 104, 106 обеспечивают высокое давление текучей среды, например, от 40 до 500 бар. Гидромотор 110 приводит в действие рабочие органы 114. Рабочими органами 114 могут быть, например, дисковые пилы, или рыхлители, или рабочие органы любого другого типа.
Гидромотор 112 управляет системой 116 приводов хода, например, гусениц или пневматических колес или любых других средств для обеспечения прямого и обратного движения рабочей машины.
Гидравлическая система содержит, кроме того, датчик 118 числа оборотов двигателя. Датчик 118 числа оборотов двигателя предназначен для измерения угловой скорости двигателя, например, угловой скорости вала 120, которым двигатель 102 приводит в движение насосы 104, 106 с числом оборотов до 0-4000 об/мин. На практике вал 120 двигателя 102 вращается с числом оборотов 0-2500 об/мин.
Далее показаны устройства 122 управления. Устройства 122 управления могут содержать блок 124 управления числом оборотов двигателя и блок 126 настройки числа оборотов двигателя.
Далее показаны устройства 128 детектирования. Устройства 128 детектирования позволяют идентифицировать режим прямого и обратного движения исполнительных органов рабочей машины. Устройства 128 детектирования связаны с приборной панелью, включающей в себя ручки управления, рычаги управления, командные рычаги управления, переключатели управления, рычаги управления коробкой скоростей, рычаги переключения передач, переключающее устройство рычагов, кнопки переключения или тому подобное. Устройства 128 детектирования позволяют пользователю получить информацию относительно направления и путевой скорости или передаточного отношения. В числе этих параметров может быть текущая скорость двигателя.
Дополнительно показаны также потребители 130, представляющие собой паразитные потери рабочей машины. Потребителями 130 могут быть, например, вентиляторы охлаждения двигателя 102, электрические генераторы и тому подобное.
Датчик 118 числа оборотов двигателя передает по каналу обратной связи сигнал к блоку 124 управления числом оборотов двигателя по сигнальной линии 132.
Блок 124 принимает сигнал настройки числа оборотов двигателя от блока 126 по сигнальной линии 134. Блок 126 настройки числа оборотов двигателя принимает от устройства 128 детектирования по сигнальной линии 136 сигнал заданной путевой скорости. Сигнал заданной путевой скорости может быть задан оператором или алгоритмом устройства 128 детектирования. Кроме того, по сигнальной линии 138 блок 126 настройки оборотов двигателя может получать дополнительную информацию о настройке числа оборотов двигателя, например, основанную на перегреве машины, на состоянии аккумулятора, на положении педали торможения, переменных, зависящих от числа оборотов, например, для рулевого управления и тому подобное.
При получении из устройства 128 детектирования по сигнальной линии 136 сигнала, свидетельствующего о режиме реверса, блок 126 настройки числа оборотов двигателя обеспечивает снижение числа оборотов двигателя с помощью блока 124. Блок 124 сравнивает сигнал настройки числа оборотов двигателя с фактической частотой вращения двигателя, получаемой от датчика 118, и замедляет или ускоряет двигатель 102. В случае если фактическая частота вращения двигателя выше, чем сигнал настройки числа оборотов двигателя, частота вращения двигателя 102 снижается. В случае если фактическая частота вращения ниже, чем сигнал настройки числа оборотов двигателя, частота вращения двигателя 102 повышается.
Для установки сигнала настройки числа оборотов двигателя блок 126 получает по сигнальной линии 136 сигналы настройки заданной путевой скорости, а по сигнальной линии 138 дополнительные сигналы настройки числа оборотов двигателя.
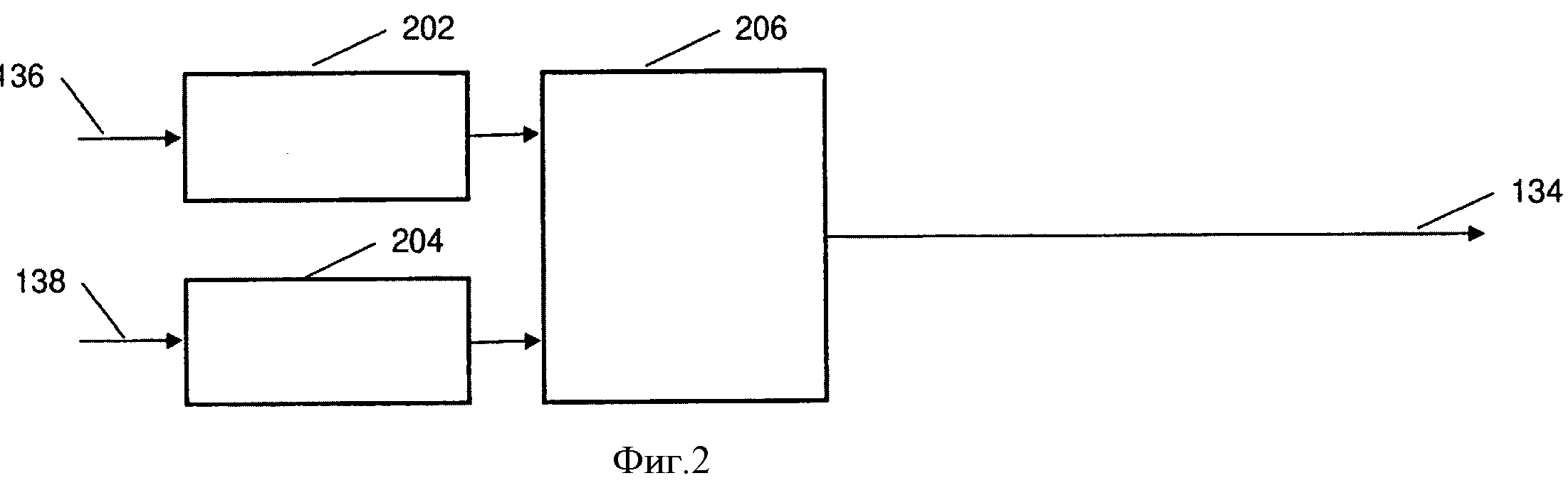
Блок 126 настройки числа оборотов двигателя показан более подробно на фиг.2. На фиг.2 представлен блок 126 с входными сигнальными линиями 136, 138 и выходной сигнальной линией 134. Через входную сигнальную линию 136 блок 126 настройки получает сигналы настройки заданной путевой скорости. Эти сигналы могут быть заданы оператором или устройством 128 детектирования. Кроме того, по сигнальной линии 136 блок 126 получает сигнал, свидетельствующий о реверсировании рабочей машины.
Блок 126 настройки оборотов двигателя направляет сигнал настройки числа оборотов двигателя по сигнальной линии 136. Для расчета выходного сигнала настройки числа оборотов двигателя блок 126 содержит первый блок 202 переключения числа оборотов двигателя и второй блок 204 переключения числа оборотов. После получения сигнала свидетельствующего об обратном ходе первый блок 202 переключения числа оборотов двигателя может снизить свой выходной сигнал настройки числа оборотов двигателя, например, с 2000 об/мин до 1700 об/мин.
По настройке заданной путевой скорости, полученной по сигнальной линии 136, рассчитывается выходной сигнал настройки числа оборотов двигателя, как показано на фиг.3. Как видно на фиг.3, сигнал настройки числа оборотов двигателя показан в зависимости от установки заданной путевой скорости. Сигнал настройки заданной путевой скорости формируется в первом блоке 202 выбора числа оборотов двигателя. Например, для прямого движения необходимые путевый скорости +1, +2, +3, +4 требуют выходного сигнала настройки оборотов двигателя 2000 об/мин. При получении отрицательной настройки заданной путевой скорости, свидетельствующей об обратном движении, сигнал настройки числа оборотов двигателя может быть снижен сначала до 1700 об/мин. При увеличении заданной путевой скорости в обратном движении, сигнал настройки числа оборотов двигателя возрастает вследствие ограниченного расхода насоса. Это обеспечивает естественную скорость движения машины по инерции. График на фиг.3, отображающий настройку заданной путевой скорости в функции настройки числа оборотов двигателя может быть скорректирован для текущих потребностей. Также может случиться, что сигнал настройки числа оборотов двигателя уменьшится до нуля.
При уменьшении настройки числа оборотов двигателя от 2000 об/мин до 1700 об/мин при получении сигнала обратного хода, двигатель 102 вращается с меньшей угловой скоростью, что обеспечивает меньшую потерю энергии. Было установлено, что в условиях обратного движения гидромотор 110 требует лишь уменьшенной энергии, так как рабочие органы 114 не нагружены. Мощность, переданная двигателем 102, может быть использована насосом 106 и мотором 112 для системы 116. Это обеспечивает скорость хода, равную заданной путевой скорости даже при уменьшенных оборотах двигателя.
Для повышения возможностей настройки гидравлической системы 100 второй блок 204 переключения оборотов двигателя может получить по сигнальной линии 138 дополнительные сигналы настройки числа оборотов двигателя. Выход блоков 202, 204 переключения оборотов двигателя связан с устройством 206 сравнения. В устройстве 206 сравнения два сигнала настройки числа оборотов двигателя, поступившие из блоков 202, 204, сравниваются, и пропускается минимальный по величине. Например, блок 206 сравнения может использовать минимальный из сигналов.
Выходной сигнал блока 206 сравнения используется как сигнал настройки числа оборотов двигателя по сигнальной линии 134.
На фиг.1 устройство 128 детектирования может использовать заданную пользователем заданную настройку скорости, известную как настройку максимальной скорости. Для того чтобы перевести настройку максимальной скорости в соответствующую путевую скорость, когда настройка обратной максимальной скорости равна той же настройке максимальной прямой путевой скорости по абсолютной величине, желательно отобразить настройку максимальной скорости как соответствующую настройку путевой скорости.
Как показано на фиг.4, график иллюстрирует изображение сигнала настройки максимальной скорости, в функции сигнала настройки путевой скорости, что может быть использовано в устройстве 128 детектирования. Как показано, сигнал настройки максимальной скорости может быть отображен в функции соответствующего сигнала настройки путевой скорости. Линия 404 изображает движение в прямом направлении. Линия 406 изображает движение в обратном движении. Настройка максимальной скорости в обратном движении согласно линии 406 отличается от настройки максимальной скорости в прямом движении, которая показана линией 404. Линии 404, 406 настраиваемые. Например, можно осуществить настройку максимальной скорости в обратном движении в соответствии с заданной путевой скоростью, по настройке числа оборотов двигателя в соответствии с фиг.3. Также возможно использовать расчеты для вычисления сигнал настройки путевой скорости по сигналу настройки максимальной скорости.
На фиг.5 показана гидравлическая система 500 аналогичная гидравлической системе 100. Гидромотор 112 для управления системой 116 приводов здесь заменен моторами 112a и 112b. Первый мотор 112a приводит в действие первую систему 116a приводов, а второй мотор 112b приводит в действие вторую систему 116b приводов. Обеспечением двух моторов 112a, b для двух систем 116a, b приводов можно приводить в действие рабочую машину с двумя независимыми осями.
На фиг.6 показана гидравлическая система 600 аналогичная гидравлической системе 100. В дополнении к гидравлической системе 100 гидравлическая система 600 содержит в себе ограничитель 602 скорости. Ограничитель 602 скорости включен в блок 102 настройки числа оборотов двигателя. Как было описано выше, блок настройки числа оборотов двигателя настраивает сигнал настройки числа оборотов двигателя в ответ на сигнал заданной настройки путевой скорости, получаемый по сигнальным линиям 136, 138. Блок 126 настройки числа оборотов двигателя может таким образом менять сигнал настройки числа оборотов двигателя в ответ на изменения входных сигналов. Изменения сигнала настройки числа оборотов двигателя могут быть ограничены. Например, можно ограничить изменения сигнала настройки оборотов двигателя от +500 об/сек при движении в прямом направлении и -500 об/сек для обратного движения. Другие нормы ограничения также возможны. Можно обеспечить предел нормы выше, чем 2000 об/сек.
Промышленная применимость
На фиг.7 показана функциональная схема работы гидравлической системы 100.
Когда двигатель 102 запускается (700), гидравлическая система 100 приводится в действие. После старта (700) устройство детектирования 128 может действовать (702), вводить на приборную панель в рабочей машине сигнал заданной путевой скорости. Сигнал заданной путевой скорости подается в блок 126 настройки числа оборотов двигателя. В блоке 126 настройки числа оборотов двигателя полученный сигнал оценивается (704), как уже было описано в соответствии с фиг.2 и фиг.3. Результирующий сигнал настройки числа оборотов двигателя подается к блоку 124. В блоке 124 сигнал настройки числа оборотов двигателя сравнивается (706) с действительной скоростью вращения двигателя, полученной от датчика 118, и сигнал частоты вращения двигателя устанавливается (712) для того чтобы скорректировать действительную скорость вращения двигателя с заданной скоростью вращения двигателя.
Когда оператор выбирает включение в рабочей машине заднего хода, сигнал, свидетельствующий об обратном движении, определяется (708) в устройстве 128 детектирования. Устройство 128 детектирования выдает сигнал, свидетельствующий о заданном движении в обратном направлении. Этот сигнал принимается (710) в блоке 126 настройки числа оборотов двигателя. После приема этого сигнала реверса блок 126 настройки числа оборотов двигателя устанавливает (712) число оборотов двигателя в соответствии с графиком, приведенным на фиг.3. Например, сигнал настройки числа оборотов двигателя может быть уменьшен с 2000 об/мин до 1700 об/мин. Сигнал настройки числа оборотов двигателя далее преобразуется блоком 124 и в ответ на этот сигнал двигатель 102 снижает скорость до 1700 об/мин вместо 2000 об/мин.
В режиме обратного хода рабочие органы 114 могут требовать только пониженной гидравлической энергии, поскольку они не нагружены. Таким образом, даже с уменьшенной скоростью вращения гидромотора 112 может обеспечиваться достаточная мощность для системы 116 приводов, чтобы приводить в действие рабочую машину с подходящей путевой скоростью. Оператор не замечает, что двигатель 102 работает на пониженной скорости, так как скорость хода равна путевой скорости при прямом движении. Двигатель 102 действует при пониженном расходе топлива и пониженном уровнем шума. Так как двигатель 102 работает с пониженной мощностью, паразитные потери потребителей 130 могут уменьшаться. Например, вентилятор двигателя может работать с пониженной скоростью, так как машине необходимо меньшее охлаждение. Это может далее уменьшить потери мощности, так как паразитные потери потребителей уменьшаются одновременно с уменьшением потерь мощности двигателя 102.
Хотя здесь описаны предпочтительные варианты осуществления настоящего изобретения, усовершенствования и модификации могут быть сделаны без выхода за пределы следующей формулы изобретения.
Реферат
Изобретение может быть использовано для управления мощностью двигателя. Устройство содержит средства управления (СУ) и средства детектирования (СД). СУ могут управлять выходной мощностью двигателя для приведения в движение машины. СД обеспечивают идентифицирование режима заднего хода, заданной скорости движения и заданного передаточного отношения. При движении задним ходом СУ обеспечивают изменение выходной мощности посредством управления частотой вращения вала двигателя. Технический результат заключается в снижении расхода топлива. 3 н. и 12 з.п. ф-лы, 7 ил.
Формула
- средства управления выходной мощностью двигателя, предназначенного для приведения в движение машины; и
- средства детектирования, предназначенные для идентифицирования режима реверсирования машины, и обеспечивающие управление выходной мощностью упомянутого двигателя при идентифицировании упомянутого режима обратного движения, отличающееся тем, что
упомянутые средства управления предназначены для управления выходной мощностью путем использования, по меньшей мере, одного из параметров:
- заданной путевой скорости;
- заданного передаточного отношения трансмиссии,
в качестве параметра для настройки числа оборотов двигателя.
- заданная оператором настройка числа оборотов двигателя;
- автоматически заданная настройка числа оборотов двигателя холостого хода;
- переменная, зависящая от числа оборотов.
- управление выходной мощностью двигателя, приводящего в движение машину;
- идентифицирование режима обратного движения упомянутой машины; и
- уменьшение выходной мощности упомянутого двигателя при идентифицировании упомянутого режима обратного движения, отличающийся тем, что
управление выходной мощностью путем использования, по меньшей мере, одного из параметров:
- заданной путевой скорости;
- заданного передаточного отношения трансмиссии,
в качестве параметра для настройки числа оборотов двигателя.
Комментарии