Беспилотный летательный аппарат и способ его эксплуатации - RU2653324C2
Код документа: RU2653324C2
Чертежи




Описание
Изобретение относится к беспилотному летательному аппарату, а также к способу его эксплуатации.
Беспилотный летательный аппарат, также называемый дроном или БПЛА, представляет собой летательный аппарат беспилотного воздушного сообщения, который может быть применен, например, для мониторинга, обследования, разведки, в качестве беспилотной мишени, с измерительными целями или также, при оснащении его оружием, прежде всего, в районах боевых действий. Дроны могут быть применены, например, в военных целях, в разведывательных целях или в гражданских целях. Дрон летает в беспилотном режиме либо с помощью автоматизированного посредством компьютерной программы управления, либо с помощью управления посредством радиосигналов с земли или, соответственно, по спутниковому радио. В зависимости от использования и оборудования, дроны могут нести полезные нагрузки, как, например, ракеты для военного нападения.
В обыкновенном словоупотреблении для таких летательных аппаратов принято сокращение БПЛА, означающее "беспилотный летательный аппарат". Дополнительно принято сокращение БАС, означающее "беспилотная авиационная система". Данный термин охватывает совокупную систему в составе летающего дрона, наземной станции для взлета и, в соответствующих случаях, для приземления, а также станции для управления полетом и его мониторинга.
Исчерпывающее описание БАС и различных БПЛА приведено в издании Reg Austin: "Unmanned Aircraft Systems - UAVS design, development and deployment", Wiley Verlag, 2010. Настоящее раскрытие основано на данных этой публикации, эта публикация инкорпорирована в него посредством ссылки.
Из DE 102010021022 А1 известен БПЛА в форме летательного аппарата с поворотным крылом.
БПЛА с гибридной системой известны из US 8128019 В2, а также из ЕР 2196392 А2. Обе эти публикации относятся к мини-БПЛА, которые пехотные войска могут брать с собой на поле боя и которые могут летать с очень малыми мощностями на незначительной высоте. При этом двигатель внутреннего сгорания приводится в действие с постоянным числом оборотов, дополнительный электродвигатель приводится в действие переменным образом, что позволяет при простой и легкой конструкции выполнять регулирование мощности.
Более крупные БПЛА с максимальным взлетным весом от примерно 70 кг до примерно 1000 кг приводятся в действие в настоящее время только посредством двигателей с поступательно движущимися поршнями, причем, как правило, используются двигатели внутреннего сгорания с принудительным зажиганием. Еще более крупные БПЛА имеют, как правило, газовые турбовинтовые двигатели, позволяющие вырабатывать соответствующие мощности.
Изобретение обращено, прежде всего, к таким более крупным БПЛА с максимальным взлетным весом примерно от 70 кг, и имеет своей целью создание для беспилотного летательного аппарата малозатратного, но весьма разнообразно приспосабливаемого для различных функций полета привода.
Эта цель достигнута посредством беспилотного летательного аппарата с признаками по п. 1 формулы изобретения.
Выгодные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения. Выгодный способ эксплуатации приведен в дополнительном независимом пункте формулы изобретения.
Объектом изобретения является беспилотный летательный аппарат, привод которого содержит двигатель внутреннего сгорания, выполненный в виде дизельного двигателя и снабженный нагнетательным устройством для наддува двигателя, выполненным с возможностью многоступенчатого наддува, содержащим несколько последовательно включенных турбин, работающих на отработавших газах, и дополнительно содержащим по меньшей мере один механический нагнетатель, причем беспилотный летательный аппарат имеет систему управления, обеспечивающую возможность осуществления наддува двигателя с использованием и без использования энергии отработавших газов и с использованием механической энергии, получаемой от двигателя внутреннего сгорания или от электропривода.
Является предпочтительным, что привод представляет собой гибридный привод, который содержит электродвигатель и устройство хранения энергии для сохранения электрической энергии для приведения в действие электродвигателя дополнительно к двигателю внутреннего сгорания.
Является предпочтительным, что гибридный привод имеет выполненное с возможностью переключения сцепное устройство, с помощью которого двигатель внутреннего сгорания и/или электродвигатель могут быть выборочно соединены с движителем.
Является предпочтительным, что двигатель внутреннего сгорания и электродвигатель выполнены с возможностью выборочного параллельного или последовательного приведения в действие.
Является предпочтительным, что нагнетательное устройство содержит по меньшей мере первый нагнетатель и второй нагнетатель, прежде всего для многоступенчатого наддува.
Является предпочтительным, что нагнетательное устройство содержит по меньшей мере один нагнетатель, приводимый в действие посредством энергии отработавших газов.
Является предпочтительным, что по меньшей мере один механический нагнетатель приводится в действие посредством выходного вала двигателя внутреннего сгорания и/или посредством электродвигателя.
Является предпочтительным, что механический нагнетатель приводится в действие посредством электродвигателя гибридного привода.
Является предпочтительным, что система управления обеспечивает возможность управления нагнетательным устройством и/или гибридным приводом в зависимости от различных параметров при полетной эксплуатации.
Является предпочтительным, что система управления выполнена для управления нагнетательным устройством и/или гибридным приводом, прежде всего для включения и отключения первой и/или второй ступени наддува двигателя или включения и отключения электродвигателя, в зависимости по меньшей мере от одного из таких параметров, как высота, угол к вертикали взлета или захода на посадку, требуемая скорость, допустимое выделение тепла, допустимый уровень шума и/или температура.
Является предпочтительным, что двигатель внутреннего сгорания представляет собой роторно-поршневой двигатель.
Является предпочтительным, что летательный аппарат имеет максимальный взлетный вес более 70 кг, и прежде всего более 250 кг.
Объектом изобретения является также способ эксплуатации описанного выше беспилотного летательного аппарата, характеризующийся тем, что наддувом двигателя внутреннего сгорания привода и/или взаимодействием двигателя внутреннего сгорания и электродвигателя гибридного привода управляют в зависимости по меньшей мере от одного из таких параметров, как высота, угол к вертикали взлета или захода на посадку, требуемая скорость, допустимое выделение тепла, допустимый уровень шума и/или температура.
Является предпочтительным, что при превышении или снижении ниже предварительно заданных предельных значений по меньшей мере для одного параметра подключается или выключается:
- первая ступень наддува,
- вторая ступень наддува,
- механический нагнетатель,
- электрический нагнетатель,
- первый нагнетатель, работающий на отработавших газах,
- второй нагнетатель, работающий на отработавших газах, или
- электродвигатель, дополнительно к работающему двигателю внутреннего сгорания,
и/или
- двигатель внутреннего сгорания, дополнительно к работающему электродвигателю.
БПЛА в различных конфигурациях находят свое применение для самых разнообразных приложений в военной и в гражданской областях. В отношении энергетической эффективности чисто электрические приводы могли бы быть наиболее выгодными. Чисто электрические приводы могли бы быть также, прежде всего, при военных использованиях выгодными, принимая во внимание тепловую или акустическую сигнатуру. Другими словами, преимущество электрического привода для БПЛА при военном использовании состоит в том, что достигается возможность особо тихой полетной эксплуатации и/или полетной эксплуатации с незначительными тепловыми эмиссиями таким образом, что уменьшена опасность обнаружения БПЛА.
В настоящее время, однако, чисто электрические приводы подходят только для незначительных мощностей и незначительных времен полета. Например, чисто электрический привод мог бы быть применим для тактических БПЛА примерно до 70 кг максимального взлетного веса при временах полета от 20 минут до максимально 3 часов. Типичные приводные мощности составили бы в таком случае от 2 до 20 кВт. Однако при этом проблема состоит в плотности хранения энергии современных батарей.
Для обеспечения возможности использования преимуществ электрического привода также и для более крупных БПЛА, а также для большей высоты полета и более протяженных расстояний, прежде всего, для БПЛА САДПП-класса (средневысотный аппарат с длительной продолжительностью полета) или также ВАДПП-класса (высотный аппарат с длительной продолжительностью полета), изобретение предусматривает использование двигателей внутреннего сгорания, которые питаются дизельным топливом или керосином, и имеют наддув.
Наиболее предпочтительно, эти двигатели внутреннего сгорания являются частью гибридного привода, прежде всего предусмотрен дизель-электрический гибридный привод.
Дизельные и керосиновые двигатели могут быть применены универсально, например, также как приводы БПЛА корабельного базирования. Соответствующие двигатели имеют менее значительную потребность в топливе, чем двигатели внутреннего сгорания с принудительным зажиганием или газовые турбины, а также лучшие показатели работы в диапазоне частичных нагрузок.
Для энергетической и системно-технической оптимизации согласно изобретению предусмотрен наддув посредством нагнетательного устройства.
Поскольку при этом для нагнетателей используется энергия отработавших газов двигателей внутреннего сгорания, как например, энергия отработавших газов дизельных двигателей, то является возможным существенное уменьшение тем самым тепловой сигнатуры.
Предпочтительно, такой дизельный или керосиновый двигатель внутреннего сгорания с наддувом скомбинирован с электрическими компонентами в приводном механизме для БПЛА. Это предлагает, прежде всего, следующие преимущества:
- чисто электрический режим возможен, например, в области контроля эмиссии. Подлет может быть произведен при задействовании двигателя внутреннего сгорания, между тем как в области контроля эмиссии осуществляется чисто или в значительной степени чисто электрический режим для уменьшения тепловой и акустической сигнатуры и для повышения, таким образом, безопасности летательного аппарата.
- усиленный привод возможен посредством подключение электродвигателя в механическую трансмиссию. Такой усиленный привод может применяться, например, для взлетной фазы и/или для этапа приземления при критических условиях среды или для бегства или в прочих ситуациях, где имеется нужда в необычно высоких мощностях.
- такой привод можно применять для всех принимающихся в расчет конфигураций БПЛА. БПЛА может иметь, например, вертолетную конфигурацию, квадрокоптерную конфигурацию, конфигурацию с поворотным крылом и/или конфигурацию с поворотными винтами.
Прежде всего, согласно варианту осуществления изобретения могут приводиться в действие БПЛА с приводом пропеллером и/или с приводом пропеллером в кольцевом обтекателе или с несущими винтами класса мощности от 30 кВт до 400 кВт на отдельный двигатель внутреннего сгорания. При необходимости в более высокой мощности могут быть применены, например, несколько двигателей внутреннего сгорания. Наиболее предпочтительными к использованию являются дизельные и роторно-поршневые керосиновые двигатели.
Такой роторно-поршневой двигатель построен очень компактно и, также и при использовании с дизельным топливом или керосином, относительно легко. Кроме того, он легко может быть создан с несколькими степенями мощности. Для нижней степени мощности, например, предусмотрен однороторный роторно-поршневой двигатель, при большей степени мощности прибавляется к использованию последующий ротор и т.д.
Особо предпочтительный вариант осуществления относится к объединению такого двигателя внутреннего сгорания с электродвигателем и электрическим энергетическим накопителем в гибридный привод, который, предпочтительно, предусмотрен в виде параллельного гибрида при условии предусмотрения самых различных решений по наддуву двигателя внутреннего сгорания.
Предпочтительно, БПЛА предусмотрен с использованием горючего "тяжелое топливо" и с наддувом. Под "тяжелым топливом", прежде всего, в США понимают дизельное и/или керосиновое горючее.
Дизельные двигатели с наддувом известны, само собой разумеется, в автомобильной технике. В качестве примера известного дизельного двигателя с наддувом можно назвать, например, трехцилиндровый турбодизельный двигатель легкового автомобиля "Smart", который доступен на рынке также как отдельный двигатель. Согласно изобретению дизельный двигатель с наддувом или керосиновый двигатель с наддувом применены для беспилотного летательного аппарата. Это представляет интерес, прежде всего, при применении БПЛА корабельного базирования.
Наиболее предпочтительным является использование наддува двигателя внутреннего сгорания. Например, предусмотрен наддув при использовании энергии отработавших газов. В данном случае применимы, прежде всего, соединенные с работающими на отработавших газах турбинами нагнетатели - "турбонагнетатели". Прежде всего, энергия отработавших газов используется двухступенчатым образом посредством последовательно включенных работающих на отработавших газах турбин. За счет использования энергии отработавших газов достигают уменьшения температуры выхлопных газов. Вследствие этого уменьшена сигнатура для инфракрасного обнаружения БПЛА.
Другими преимуществами приводимых в действие дизельным топливом или керосином двигателей по сравнению с двигателями внутреннего сгорания с принудительным зажиганием или газовыми турбинами являются более высокая эффективность и лучшие показатели работы в диапазоне частичных нагрузок, кроме того, такие двигатели являются более долговечными. Дизельные двигатели выдают их номинальную мощность при более низком числе оборотов.
Наиболее предпочтительно, предусмотрены, по меньшей мере, первый нагнетатель и второй нагнетатель, что делает возможным, по меньшей мере, двухступенчатый наддув.
Для более незначительных высот и более незначительной мощности двигатель внутреннего сгорания может работать без наддува. Для несколько более высоких мощностей подключается первая ступень наддува. Для еще более высоких мощностей может быть подключена вторая ступень. Прежде всего, двухступенчатый наддув интересен при последующем использовании энергии отработавших газов. Такой двухступенчатый наддув интересен для более высоких высот свыше примерно 4000 м, и может быть применено также для высот примерно от 10000 м до 12000 м.
Другим интересным решением является механический наддув. Таким образом, является предпочтительным, что двигатель внутреннего сгорания имеет в качестве нагнетателя по меньшей мере один механический нагнетатель. Преимущество механического наддува состоит в том, что двигатель не должен работать против давления отработавших газов. Предпочтительно, механический наддув является отключаемым. Привод механического нагнетателя может производиться, например, посредством приводного вала двигателя внутреннего сгорания и/или посредством электрического привода. Наиболее предпочтительным в качестве электрического привода является применение электродвигателя гибридного привода.
Таким образом, многоступенчатый наддув является возможным как с использованием энергии отработавших газов, так и без него, при использовании механической энергии от двигателя внутреннего сгорания или от электропривода.
Наиболее предпочтительно, предусмотрена система управления, которая управляет различными разновидностями приводов - электродвигателем и/или двигателем внутреннего сгорания, и/или различными нагнетательными системами в зависимости от различных параметров при полетной эксплуатации БПЛА.
Возможные параметры в данном случае являются различными высотами. Они могут регистрироваться, например, посредством датчика давления. В таком варианте осуществления изобретения БПЛА имеет датчик давления, сигналы которого применены для управления приводом. Другими возможными параметрами являются, например, крутой подъем и/или скоростной полет. Другой параметр может быть представлен мощностью для взлета и/или наземного режима. С помощью такой концепции привода как БПЛА САДПП-класса, так и БПЛА ВАДПП-класса могут быть приведены в действие с большим функциональным разнообразием и с большим диапазоном возможностей использования.
Согласно другому аспекту изобретения предложен БПЛА с гибридным приводом, причем БПЛА приводится в действие после приземления в качестве мобильного модуля питания. БПЛА, предпочтительно, прилетает к требуемому месту производства работ и быстро приводится там в готовность, в противоположность аварийным агрегатам наземного базирования.
За счет своей повышенной гибкости использования БПЛА может прилетать, прежде всего, к местам производства работ, которые не могут быть достигнуты по наземной дороге или могут быть достигнуты с большим трудом, и обеспечивать там электроснабжение. В качестве источника первоначального энергоснабжения служит двигатель внутреннего сгорания, который для предоставления требуемой мощности приводит в действие генератор. В другом варианте осуществления электрический энергетический накопитель может быть исключен таким образом, что вес может быть сэкономлен. БПЛА описан как выше, так и в дальнейшем.
Варианты осуществления изобретения разъяснены в последующем посредством приложенных чертежей более подробно. При этом показано:
Фиг. 1 - схематическое представление первого варианта осуществления беспилотного летательного аппарата с приводом,
Фиг. 2 - схематическое представление второго варианта осуществления беспилотного летательного аппарата с приводом,
Фиг. 3 - схематическое представление третьего варианта осуществления летательного аппарата с приводом,
Фиг. 4 - схематическое представление первого варианта осуществления привода для беспилотных летательных аппаратов согласно фиг. 1-3,
Фиг. 5 - схематическое представление первого варианта осуществления привода в первом режиме работы,
Фиг. 6 - схематическое представление первого варианта осуществления привода согласно фиг. 4 во втором режиме работы,
Фиг. 7 - схематическое представление первого варианта осуществления привода согласно фиг. 4 в третьем режиме работы,
Фиг. 8 - схематическое представление второго варианта осуществления привода для одного из беспилотных летательных аппаратов согласно фиг. 1-3,
Фиг. 9 - схематическое представление второго варианта осуществления привода согласно фиг. 8 в первом режиме работы,
Фиг. 10 - схематическое представление второго варианта осуществления привода согласно фиг. 8 во втором режиме работы,
Фиг. 11 - схематическое представление второго варианта осуществления привода согласно фиг. 8 в третьем режиме работы,
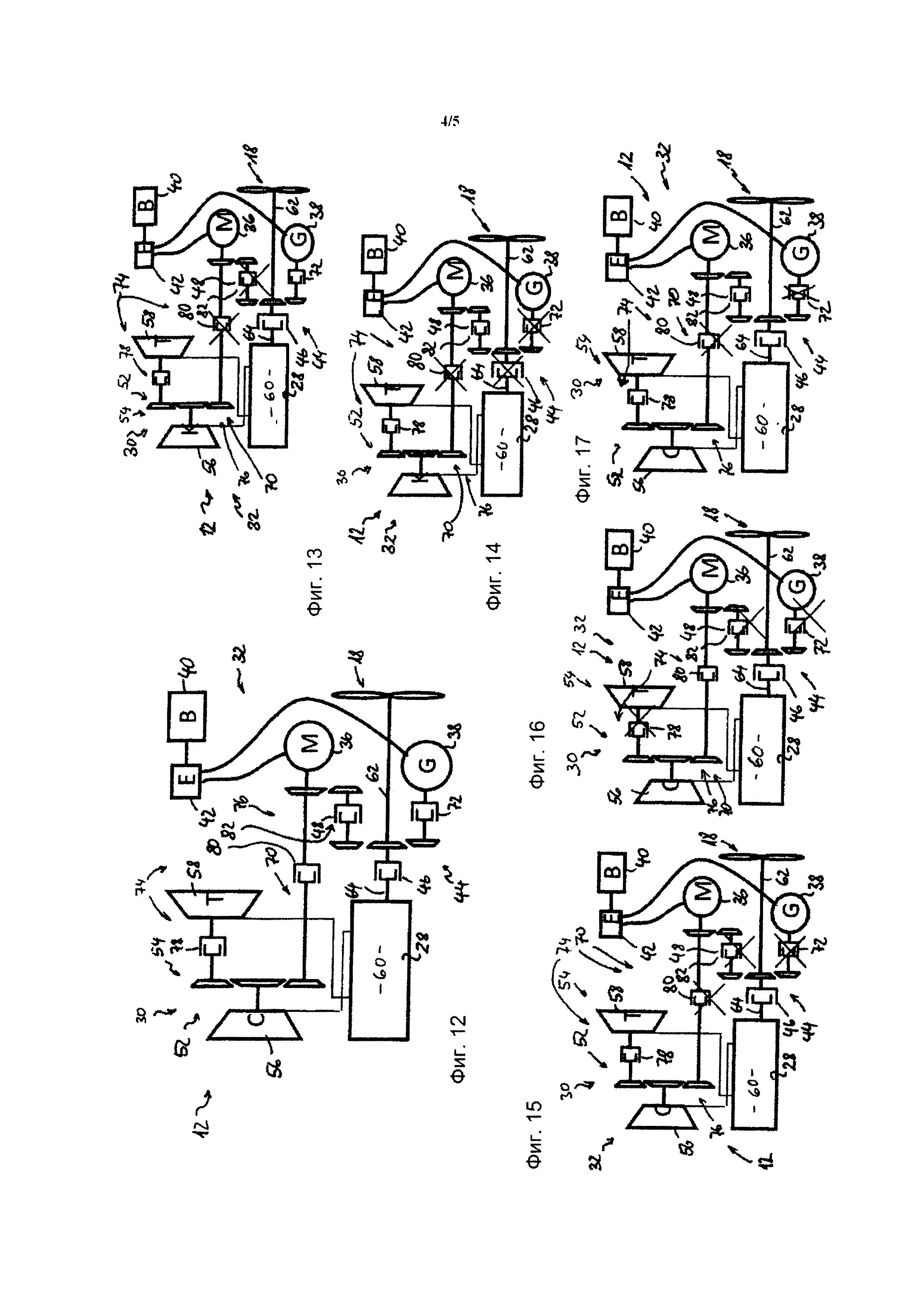
Фиг. 12 - схематическое представление третьего варианта осуществления привода для одного из беспилотных летательных аппаратов согласно фиг. 1-3,
Фиг. 13 - схематическое представление третьего варианта осуществления привода на фиг. 12 в первом режиме работы,
Фиг. 14 - схематическое представление третьего варианта осуществления привода на фиг. 12 во втором режиме работы,
Фиг. 15 - схематическое представление третьего варианта осуществления привода на фиг. 12 в третьем режиме работы,
Фиг. 16 - схематическое представление третьего варианта осуществления привода на фиг. 12 в четвертом режиме работы,
Фиг. 17 - схематическое представление третьего варианта осуществления привода на фиг. 12 в пятом режиме работы, и
Фиг. 18 - схематическая диаграмма для представления системы управления приводом беспилотного летательного аппарата на основе различных параметров при полетной эксплуатации.
На фиг. 1-3 схематически представлены три различных варианта осуществления беспилотных летательных аппаратов 10 с указанием соответствующего привода 12. Беспилотные летательные аппараты 10 называют также дронами или также, в профессиональном языке, БПЛА. Они являются частью системы беспилотного авиационного сообщения, называемой БАС, посредством которой могут быть выполнены военные и гражданские операции, такие как, прежде всего, разведывательные полеты, миссии мониторинга или измерительные миссии. БАС имеет наряду с представленными беспилотными летательными аппаратами 12 также непредставленные, но достаточно известные системные компоненты, такие как, например, наземный пульт управления, с которого БПЛА телеуправляемо обслуживается, и соответствующие коммуникативные устройства для коммуникации между беспилотным летательным аппаратом 10 и пультом управления. За дальнейшими подробностями по БАС рекомендуется обращение к ранее упомянутой публикации Reg Austin "Unmanned Aircraft Systems - UAS design, development and deployment", Wiley Verlag 2010.
На фиг. 1 представлен первый БПЛА 14, который предусмотрен в форме приводимого в действие двигателем планера с фиксированными несущими поверхностями 16, с обыкновенным хвостовым оперением 18 и с движителем 18, в данном случае, выполненным в форме пропеллера 20, например, на вертикальном стабилизаторе 22. Конструкция этого первого БПЛА 14 основана на конструкции снабженного электрическим вспомогательным приводом планера "e-Genius", который был разработан институтом авиастроения университета Штутгарта и совершил свой первый полет 25 мая 2011.
В отличие от известного туристического мотопланера с электроприводом "e-Genius", первый БПЛА 14 не оснащен пассажирской кабиной, вместо этого, предназначенное для пилота и пассажира пространство использовано для крепления компонентов БАС и ее полезного груза для реализации требуемой миссии БПЛА.
Относительно представленного на фиг. 2 второго БПЛА 24 речь идет о БПЛА в вертолетном исполнении, который приводится в действие также с помощью привода 12. В качестве движителя 18 в данном случае предусмотрен несущий винт 25 или несущий винт 25 и хвостовой винт.
Представленный на фиг. 3 третий БПЛА 26 является другим примером беспилотного летательного аппарата 10 на примере летательного аппарата с поворотным крылом (конфигурация с поворотным крылом и с поворотными винтами). Также в этом третьем БПЛА 26 привод 12 применен для приведения в действие движителей 18, выполненных в форме поворотных несущих винтов 27.
Различные варианты осуществления для привода 12 разъяснены в дальнейшем посредством фиг. 4-17 более подробно.
Во всех трех представленных здесь различных вариантах осуществления привода 12 он снабжен выполненным для питания дизельным топливом и/или керосином двигателем 28 внутреннего сгорания и нагнетательным устройством 30, выполненным для наддува двигателя 28 внутреннего сгорания.
Привод 12 также во всех трех представленных здесь вариантах осуществления представлен гибридным приводом 32. Гибридный привод 32 имеет наряду с двигателем 28 внутреннего сгорания электрическую машину 34. Электрическая машина 34 может быть использована в режиме работы в качестве электродвигателя 36, что обозначено на чертежах посредством букв М, а в другом режиме работы может быть использована в качестве электрического генератора 38, что обозначено на чертежах посредством букв G.
В других, здесь подробно непредставленных вариантах осуществления электрическая машина 34 может являться либо электродвигателем, либо генератором. В других, далее более подробно разъясненных вариантах осуществления предусмотрены отдельный электродвигатель 36, М и отдельный генератор 38, G.
Гибридный привод 32 имеет, кроме того, электрический энергетический накопитель 40, который выполнен, например, в виде системы заряжаемых элементов аккумуляторной батареи или в виде системы аккумуляторов, и отмечен на чертежах, в любом случае, как "В". Электрическая машина 34 присоединена посредством силовой электроники 42, Е к электрическому энергетическому накопителю 40, В.
Гибридный привод 32 выполнен в представленных вариантах осуществления как параллельный гибрид, причем двигатель 28 внутреннего сгорания или электродвигатель 36 используются выборочно для приведения в действие беспилотного летательного аппарата 10, или как двигатель 28 внутреннего сгорания, так и электродвигатель используются совместно для приведения в действие. Для этого предусмотрено выполненное с возможностью переключения сцепное устройство 44, с помощью которого двигатель 28 внутреннего сгорания и электрическая машина 34 выборочно присоединяются к соединенному с движителем 18 выходному валу 62.
Выполненное с возможностью переключения сцепное устройство 44 имеет первое сцепление 46 для присоединения двигателя 28 внутреннего сгорания и второе сцепление 48 для присоединения электрической машины 34. Сцепное устройство 44 и нагнетательное устройство 30, см. фиг. 1-3, являются управляемыми в зависимости от различных параметров при полетной эксплуатации, как это разъяснено далее еще более подробно. Термин "сцепление" обозначает в данном случае общее понятие для устройств, с помощью которых крутящие моменты могут быть выборочно переданы (сцепление включено) или выключены (сцепление отключено).
Как можно, кроме того, понять из фиг. 4-17, нагнетательное устройство 30 имеет, по меньшей мере, первый нагнетатель 52, выполненный для наддува двигателя 28 внутреннего сгорания.
Первый нагнетатель 52 может быть выполнен в виде турбонагнетателя 54 отработавших газов для использования энергии отработавших газов с целью нагнетания.
Прежде всего, нагнетательное устройство 30 имеет компрессор 56 для производства давления, что позволяет поставлять воздух сгорания с повышенным давлением к двигателю 28 внутреннего сгорания.
Компрессор 56 соединен с первой работающей на отработавших газах турбиной 58, что таким образом образует турбонагнетатель 54 отработавших газов в качестве первого нагнетателя 52.
Двигатель 28 внутреннего сгорания в предпочтительном варианте осуществления представлен роторно-поршневым двигателем 60. Роторно-поршневой двигатель 60, прежде всего, выполнен таким образом, как он описан и показан в немецкой заявке на патент DE 10 2012 101 032.3, и предложен, соответственно этому, для питания дизельным топливом или керосином. В зависимости от желательной степени мощности для БПЛА 14, 24, 26, роторно-поршневой двигатель 60 выполнен в виде однороторного роторно-поршневого двигателя, в виде двухроторного роторно-поршневого двигателя или в виде трехроторного роторно-поршневого двигателя или в виде многороторного роторно-поршневого двигателя. Конфигурация в виде роторно-поршневого двигателя 60 имеет к тому же особую способность к модульному построению таким образом, что посредством незначительных издержек могут быть предусмотрены один или несколько роторов.
В то время как ранее были разъяснены общие элементы представленных здесь вариантов осуществления привода 12, в дальнейшем более подробно рассмотрены различия представленных здесь вариантов осуществления.
Фиг. 4-7 показывают первый вариант осуществления привода 12 с одноступенчатым наддувом, причем лишь первый нагнетатель 52 представлен в форме турбонагнетателя 54 отработавших газов с компрессором 56, С и с присоединенной к компрессору 56 первой работающей на отработавших газах турбиной 58, Т. Двигатель 28 внутреннего сгорания и электрическая машина 34 выборочно присоединяются посредством первого сцепления 46 и второго сцепления 48 к выходному валу 62 и, вместе с тем, к движителю 18.
Таким образом, привод 12 имеет двигатель 28 внутреннего сгорания, который может быть выполнен в виде дизельного двигателя и в виде двигателя Ванкеля и который снабжен системой нагнетания в форме нагнетательного устройства 30 с компрессором 56 и с первой работающей на отработавших газах турбиной 58. Выходной вал двигателя 64 соединяется посредством первого сцепления 46 с движителем 18. Генератор 38 и электродвигатель 36 или, как здесь представлено, приводимая в действие как генератор G или как электродвигатель М электрическая машина 34, соединены посредством электронного управляющего аппарата (силовой электроники 42, Е) с буферной батареей (электрическим энергетическим накопителем 40, В), который может быть применен попеременно в режиме генератора для заряжения или для снабжения электрической энергией электрической машины 34 в режиме электродвигателя.
Фиг. 5 показывает первый режим работы, в котором гибридный привод 32 приводится в действие в чисто электрическом режиме. Для этого первое сцепление 46 отключено, а второе сцепление 48 включено.
Фиг. 6 показывает "обычный" режим, в котором приводная мощность гибридного привода 32 поставляется только посредством двигателя 28 внутреннего сгорания. Для этого первое сцепление 46 включено, а второе сцепление 48 отключено.
В показанном на фиг. 7 третьем режиме работы включены как первое сцепление 46, так и второе сцепление 48, и таким образом, как двигатель 28 внутреннего сгорания, так и электрическая машина 34 соединены с выходным валом 62 и тем самым также и друг с другом. В этом третьем способе при приведении в действие электрической машины 34 в качестве электродвигателя М может быть выполнена функция электрического усиления, то есть, повышения системной мощности посредством дополнительной электрической энергии или, при функционировании электрической машины 34 в качестве генератора G, реализован режим зарядки.
Таким образом, посредством представленного построения первого варианта осуществления гибридного привода 32, как он представлен на фиг. 4-7, являются возможными по меньшей мере четыре следующих рабочих состояния:
А) Обычный режим: Двигатель 28 внутреннего сгорания приводит в действие движитель 18, в то время как генератор G и электродвигатель М отцеплены. Это соответствует режиму работы прежней системы привода БПЛА на основе двигателей внутреннего сгорания.
Б) "Электрическое усиление": Дополнительно к двигателю 28 внутреннего сгорания с выходным валом 62 соединен электродвигатель М. За счет этого на выходной вал 62 может быть передан дополнительный крутящий момент, вследствие чего в течение короткого времени, в зависимости от мощности электрического энергетического накопителя 40, предоставляется в распоряжение дополнительная мощность и, таким образом, пиковые потребности по мощности могут быть удовлетворены.
В) "Режим зарядки": В фазах работы, которые не нуждаются во всей моторной мощности двигателя 28 внутреннего сгорания для движителя 18, часть находящейся в распоряжении мощности может быть отдана в генератор G для возобновляемой зарядки электрического энергетического накопителя 40.
Г) "Чисто электрический режим": Дополнительно к ранее описанным режимам работы двигатель 28 внутреннего сгорания также может быть отцеплен и выключен для переключения на чисто электрический режим. В данном случае с выходным валом теперь соединен электродвигатель Е, который снабжается электрической энергией посредством электрического энергетического накопителя В.
Это предлагает, прежде всего, следующие преимущества.
Функциональность параллельного гибрида позволяет осуществлять чисто электрический режим для сокращения тепловой и акустической сигнатуры в критических фазах миссии. Одновременно, высокая плотность хранения энергии ископаемого горючего может быть использована в обычном режиме для обеспечения такой дальности действия, которая не может быть достигнута посредством чистого электропривода. Дополнительно, система предлагает возможность возобновляемой зарядки батареи в полете, причем посредством повышения точки нагрузки двигателя внутреннего сгорания 28 может быть выбрано эффективное рабочее состояние двигателя 28 внутреннего сгорания.
На фиг. 8-11 представлен второй вариант осуществления гибридного привода 32. Этот второй вариант осуществления соответствует по существу первому варианту осуществления за исключения того различия, что второй вариант осуществления дополнительно к первой работающей на отработавших газах турбине 58, Т имеет еще и вторую работающую на отработавших газах турбину 66, Т, которая соединена или может быть соединена с выходным валом 64 двигателя и/или с выходным валом 62.
Посредством второй работающей на отработавших газах турбины 66 энергия отработавших газов двигателя 28 внутреннего сгорания может быть использована на двух ступенях. В первой работающей на отработавших газах турбине 58, Т энергия отработавших газов используется посредством компрессора 56, С для наддува двигателя 28 внутреннего сгорания. Во второй работающей на отработавших газах турбине 66, Т остаточная энергия отработавших газов используется для дальнейшего приведения в действие.
Таким образом, можно по сравнению с первым вариантом осуществления понизить температуру выхлопных газов, вследствие чего тепловая сигнатура беспилотного летательного аппарата 10 может быть уменьшена.
В остальном функциональность представленного на фиг. 8-11 второго варианта осуществления гибридного привода 32 соответствует функциональности первого варианта осуществления гибридного привода 32, как она представлена на фиг. 4-7. Соответственно этому, также фиг. 9 показывает первый режим работы для чистого электрорежима, фиг. 10 показывает второй режим работы для обычного режима, и фиг. 11 показывает третий режим работы, в котором может выполняться либо электрическое усиление, либо может выполняться режим зарядки. Другие подробности этих трех режимов работы приведены выше в отношении первого варианта осуществления.
На фиг. 12-17 третий вариант осуществления гибридного привода 32 представлен в виде примера привода 12 для БПЛА 14, 24, 26, причем одинаковым или соответствующим элементам, как в первых двух вариантах осуществления, отнесены одинаковые ссылочные обозначения, а для более близкого ознакомления с подробностями рекомендуется обращение к вышеприведенному изложению.
Нагнетательное устройство 30 выполнено в этом третьем варианте осуществления для переключаемого многоступенчатого наддува, и имеет для создания многоступенчатого наддува первый нагнетатель 52 и второй нагнетатель 70, причем различные нагнетатели 52, 70 посредством системы 50 управления могут быть управляемым образом подключены или выключены, что позволяет выключать или подключать различные ступени наддува.
В третьем варианте осуществления гибридного привода 32 в данном случае вместо электрической машины 34, которая может приводиться в действие как в режиме электродвигателя, так и в режиме генератора, представлены по меньшей мере один электродвигатель 36, М и один генератор 38, G. Сцепное устройство 44 имеет первое сцепление 46 для соединения выходного вала 64 двигателя с выходным валом 62, второе сцепление 48 для соединения электродвигателя 36, М с выходным валом 62 и третье сцепление 72 для присоединения генератора 72 к выходному валу 64 двигателя.
Кроме того, предусмотрено сцепное устройство нагнетателя 74 для включения нагнетательного устройства 30, прежде всего для присоединения или отцепления первого нагнетателя 52 и/или второго нагнетателя 70.
Для образования первого нагнетателя 52 предусмотрен компрессор 56 с первой работающей на отработавших газах турбиной 58.
Кроме того, в качестве второго нагнетателя 70 предусмотрен механический нагнетатель 76. Механический нагнетатель 76 может использовать, например, компрессор 56 и механический источник привода. В первом варианте осуществления или в первом способе наддува для этого использован электрический привод, такой как, прежде всего, электродвигатель 36, М. Во втором варианте осуществления или во втором способе наддува для этого использовано вращение выходного вала 64 двигателя.
В представленном на фиг. 12 варианте осуществления компрессор 56, С схематически представлен в качестве производителя давления, который соединяется посредством первого сцепления 78 нагнетателя в составе сцепного устройства 74 нагнетателя с первой работающей на отработавших газах турбиной 58, Т для образования, таким образом, турбонагнетателя 54 отработавших газов в качестве первого нагнетателя 52, а посредством второго сцепления 80 нагнетателя в составе сцепного устройства 74 нагнетателя присоединяется к электродвигателю 36, М для образования, таким образом, приводимого в действие электрически механического нагнетателя 76, а также, в соответствующих случаях, посредством третьего сцепления 82 нагнетателя в составе сцепного устройства 74 нагнетателя присоединяется к выходному валу 64 двигателя для образования, таким образом, приводимого в действие посредством вращения выходного вала механического нагнетателя 76.
В представленном варианте осуществления в качестве третьего сцепления 82 нагнетателя просто обозначено второе сцепление 48 в составе переключаемого сцепного устройства 44.
На фиг. 13-17 представлены пять различных режимов работы для этого третьего варианта осуществления гибридного привода 32. В режиме работы на фиг. 13 первое сцепление 78 нагнетателя включено таким образом, что действует первая ступень наддува. Нагнетенный с помощью первой ступени двигатель 28 внутреннего сгорания соединен посредством включенного первого сцепления 46 с движителем 18. Генератор 38, G соединен посредством включенного третьего сцепления 72 также с выходным валом 64 двигателя. За счет этого представленный на фиг. 13 первый режим работы соответствует режиму зарядки, когда тяговое усилие производится посредством нагнетенного с помощью первой ступени двигателя 28 внутреннего сгорания, а излишняя мощность используется для зарядки электрического энергетического накопителя 40. Второе сцепление 48 и второе сцепление 80 нагнетателя отключены таким образом, что электродвигатель 36 не соединен ни с нагнетательным устройством 30, ни с движителем 18.
Фиг. 14 показывает в качестве второго режима работы электрический режим. Для этого второе сцепление 80 нагнетателя отключено, а электродвигатель посредством включения второго сцепления 48 соединен с выходным валом 62 и тем самым с движителем 18. Первое сцепление 46 и третье сцепление 72 отключены таким образом, что ни двигатель 28 внутреннего сгорания, ни генератор не соединены с выходным валом 62. Двигатель 28 внутреннего сгорания в данном случае может быть выключен.
Представленный на фиг. 15 третий режим работы соответствует обычному режиму при одноступенчатом наддуве только с помощью турбонагнетателя 54 отработавших газов. Для этого включены лишь первое сцепление 56 и первое сцепление 78 нагнетателя, все остальные сцепления отключены.
Фиг. 16 показывает четвертый режим работы в форме режима только с двигателем 28 внутреннего сгорания, причем он наддувается, однако, посредством второго нагнетателя 70 электрического нагнетания. Для этого включены первое сцепление 46 и второе сцепление 80 нагнетателя, все другие сцепления отключены.
Фиг. 17 показывает пятый режим работы, в котором в качестве другой функциональности представлено электрическое усиление. Для этого одноступенчатым образом нагнетенный двигатель 28 внутреннего сгорания (активен турбонагнетатель 54 отработавших газов) соединен с движителем 18, а дополнительно с движителем 18 еще соединен и электродвигатель 36. Первое сцепление 46 и второе сцепление 48, а также первое сцепление 78 нагнетателя включены, все другие сцепления отключены.
Само собой разумеется, другие режимы работы являются возможными посредством различных переключений различных сцеплений 46, 48, 72, 78, 80, 82.
В представленном на фиг. 12-17 третьем варианте осуществления гибридного привода 32 привод 12 имеет двигатель внутреннего сгорания - дизельный двигатель/двигатель Ванкеля с системой нагнетания - нагнетательным устройством 30, содержащим компрессор 56 и работающую на отработавших газах турбину 58. Компрессор 56 нагнетательного устройства 30 может приводиться в действие при этом посредством системы сцепления - сцепного устройства 74 нагнетателя, либо от работающей на отработавших газах турбины 58, либо от электродвигателя, например, электродвигателя М гибридной системы. Выходной вал 64 двигателя от двигателя 28 внутреннего сгорания может быть соединен непосредственно с движителем 18 (например, пропеллером 20 или несущим винтом 25, 27). Дополнительно, электрический генератор 38, G подлежит соединению посредством отдельного сцепления - третьего сцепления 72 с выходным валом 64 двигателя и/или с выходным валом 62. Генератор 38, G и электродвигатель 36, М соединены посредством электронного блока управления - силовой электроники 42, Е с буферной батареей - примером воплощения электрического энергетического накопителя 40, В, которая попеременно заряжается генератором 38, G или применяется для снабжения питанием электродвигателя 36, М.
Посредством представленных на фиг. 12-17 построений являются возможными, прежде всего, следующие четыре рабочих состояния:
А) "Обычный режим": Компрессор 56 турбонагнетателя 54 отработавших газов приводится в действие работающей на отработавших газах турбиной 58 нагнетательного устройства 30, при этом электродвигатель 36, М и генератор 38, G отцеплены. Это соответствует режимам работы прежних обычных систем привода, разумеется, с различием в питании дизельным топливом или керосином с дополнительным наддувом.
Б) "Электрический турборежим": Компрессор 56 нагнетательного устройства 70 приводится в действие в этом случае электродвигателем 36, М.
Таким образом, может быть получено большее повышение производительности, чем в случае соединения электродвигателя 36, М с выходным валом 62.
В) "Электрическое усиление": В данном случае мощность электродвигателя 36, М передана дополнительно к мощности двигателя внутреннего сгорания на выходной вал 62.
Г) "Режим зарядки": В фазах работы, когда нет нужды в полной моторной мощности двигателя 28 внутреннего сгорания на движителе 18, часть находящейся в распоряжении мощности может быть отдана в генератор 38, G для зарядки батареи - электрического энергетического накопителя 40, В. Компрессор 56 нагнетательного устройства 30 приводится в действие при этом работающей на отработавших газах турбиной 58, в то время как электродвигатель 36, М отцеплен.
Это предлагает, прежде всего, следующие преимущества.
Наряду с функциональностью параллельного гибрида - режима с двигателем внутреннего сгорания, чисто электрического режима или возобновляемой зарядки батареи, электродвигатель 36, М для предоставления в распоряжение дополнительной мощности может быть применен двумя способами:
А) посредством электрического усиления, при котором мощность непосредственно подводится на выходной вал 62 или
Б) посредством электрического приведения в действие механического нагнетателя 76, при котором необходимая для наддува мощность предоставляется в распоряжение электродвигателем 36, М и не должна быть в процессе отобрана от двигателя внутреннего сгорания. Это имеет то преимущество, что, в противоположность приводу с работающей на отработавших газах турбиной 58, не образуется противодействия для отработавших газов, против которого, в противном случае, должен работать двигатель 28 внутреннего сгорания. В противоположность применению механического привода для механического нагнетателя 76, прежде всего, посредством сцепления с выходным валом 64 двигателя, с выходного вала не снимается какая-либо механическая мощность.
Выше посредством чертежей представлены самые различные варианты осуществления для гибридного привода 32. Само собой разумеется, возможны и другие варианты осуществления, которые, однако, не представлены здесь более подробно. Например, вторая работающая на отработавших газах турбина 66 может иметься в наличии также и в представленных на фиг. 12-17 вариантах осуществления, прежде всего, с возможностью переключения посредством отдельного переключающего устройства, которое может включать или отключать эту вторую работающую на отработавших газах турбину 66.
Кроме того, дополнительно или альтернативно приводу механического нагнетателя 76 посредством электродвигателя 36 гибридного привода, возможен также отдельный электродвигатель для привода компрессора. С другой стороны, также является возможным приведение в действие компрессора 56 посредством выходного вала 64 двигателя. Кроме того, вместо построения только с одним компрессором 56 также является возможным выполнение нескольких компрессоров, которые приводятся в действие посредством первой работающей на отработавших газах турбины 58, второй работающей на отработавших газах турбины 66, электродвигателя 36 гибридного привода 32 и/или посредством выходного вала 64 двигателя.
В дальнейшем возможная система управления гибридного привода 32 для беспилотного летательного аппарата 10 разъяснена еще более подробно посредством представления на фиг. 18.
Как показывают фиг. 2 и 3, беспилотный летательный аппарат 10 может быть представлен БПЛА 24, 26, который способен к вертикальному взлету и посадке (VTOL) и/или БПЛА 14, 26, который способен к обычному взлету и посадке (CTOL) как самолет, и к использованию воздушного потока при полете летательного аппарата 10.
На диаграмме фиг. 18 представлена необходимая мощность Р в зависимости от скорости V полета. Стрелка R показывает область крейсерского полета - область полета на крейсерской скорости. "ISA" означает международный стандарт по атмосфере (нормальную атмосферу).
Кривая S показывает необходимую мощность для различных условий полета на высоте уровня моря в условиях стандартной атмосферы, кривая HI показывает необходимую мощность при больших высотах и в условиях стандартной атмосферы и кривая Н2 показывает необходимую мощность при большой высоте и при превышении примерно на 15°С условий стандартной атмосферы.
Посредством различных режимов работы покрыты все необходимые при этих различных условиях эксплуатации и условиях полета мощностные диапазоны.
Система управления переключает различные режимы работы, такие как, прежде всего, включение или отключение нагнетательного устройства или включение или отключение различных нагнетателей или различных ступеней наддува в зависимости от параметров, которые отображают условия эксплуатации, такие как действительная и заданная скорость, высота, прежде всего, регистрируемая посредством датчиков давления, требуемые режимы VTOL или CTOL, или температура.
Представленные на чертеже, подключаемые или отключаемые посредством системы управления ступени L мощности обозначают максимально достижимую мощность для:
L1 - режима двигателя внутреннего сгорания без наддува,
L2 - режима двигателя внутреннего сгорания с наддувом на первой ступени, прежде всего режима первого нагнетателя 52, то есть турбонагнетателя 54 отработавших газов,
L3 - режима двигателя внутреннего сгорания с наддувом на второй ступени, например режима второго нагнетателя 70, такого как, прежде всего, приводимый в действие электрическим способом механический нагнетатель 76,
L4 - режима двигателя внутреннего сгорания с наддувом на второй ступени, и дополнительно, с функцией электрического усиления.
Наддув двигателя повышает доступную моторную мощность двигателя 28 внутреннего сгорания. Это делает возможным, прежде всего, вертикальные взлеты на большой высоте и/или при высоких температурах окружающей среды ("hot and high conditions"). Кроме того, вследствие этого повышена максимальная коммерческая скорость.
Возможность электрического усиления также повышает доступную мощность для таких условий, когда достигнута граница повышения мощности посредством наддува двигателя. Вследствие этого области применения могут быть еще более расширены. Являются возможными, например, вертикальные взлеты на еще больших высотах и при еще более высоких температурах, также далее повышена максимальная коммерческая скорость в трудных условиях.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 беспилотный летательный аппарат
12 привод
14 первый БПЛА
16 несущая поверхность
18 движитель
20 пропеллер
22 вертикальный стабилизатор
24 второй БПЛА
25 несущий винт
26 третий БПЛА
27 поворотный несущий винт
28 двигатель внутреннего сгорания
30 нагнетательное устройство
32 гибридный привод
34 электрическая машина
36, М электродвигатель
38,G генератор
40, В электрический энергетический накопитель
42, Е силовая электроника
44 выполненное с возможностью переключения сцепное устройство
46 первое сцепление
48 второе сцепление
50 система управления
52 первый нагнетатель
54 турбонагнетатель отработавших газов
56 компрессор
58 первая работающая на отработавших газах турбина
60 роторно-поршневой двигатель
62 выходной вал
64 выходной вал двигателя
66 вторая работающая на отработавших газах турбина
70 второй нагнетатель
72 третье сцепление
74 сцепное устройство нагнетателя
76 механический нагнетатель
78 первое сцепление нагнетателя
80 второе сцепление нагнетателя
82 третье сцепление нагнетателя
S высота над уровнем моря
R область полета на крейсерской скорости
V скорость прямолинейного горизонтального полета
Р мощность
HI большая высота, при ISA
Н2 большая высота, при ISA+15°C
ISA стандартная атмосфера
VTOL вертикальный взлет/посадка
CTOL обычный взлет/посадка
L1 режим двигателя внутреннего сгорания без наддува
L2 режим двигателя внутреннего сгорания с наддувом на 1-ой ступени
L3 режим двигателя внутреннего сгорания с наддувом на 2-ой ступени
L4 режим двигателя внутреннего сгорания с наддувом на 2-ой ступени + электрическое усиление
Реферат
Изобретение относится к области авиации, в частности к конструкциям больших беспилотных летательных аппаратов. Беспилотный летательный аппарат (10) имеет привод (12), который содержит двигатель (28) внутреннего сгорания, выполненный в виде дизельного двигателя и снабженный нагнетательным устройством (30) для наддува двигателя. Устройство содержит несколько последовательно включенных турбин, работающих на отработавших газах, и механический нагнетатель (76). Летательный аппарат (10) имеет систему (50) управления, обеспечивающую возможность осуществления наддува двигателя с использованием и без использования энергии отработавших газов и с использованием механической энергии, получаемой от двигателя внутреннего сгорания или от электропривода. Способ эксплуатации летательного аппарата (10) характеризуется тем, что наддувом двигателя (28) внутреннего сгорания привода (12) и/или взаимодействием двигателя (28) внутреннего сгорания и электродвигателя (36, М) гибридного привода (32) управляют в зависимости от высоты, угла к вертикали взлета или захода на посадку, требуемой скорости, допустимого выделения тепла, уровня шума и/или температуры. Обеспечивается возможность применения летательного аппарата на высотах более 4000 м. 2 н. и 14 з.п. ф-лы, 18 ил.
Формула
Документы, цитированные в отчёте о поиске
Силовая установка для летательного аппарата
Силовая установка для летательного аппарата
Комментарии