Гибридное транспортное средство и способ управления им - RU2563293C2
Код документа: RU2563293C2
Чертежи


Описание
Область техники
Настоящее изобретение относится к гибридному транспортному средству, в котором осуществляется управление подсоединением блока подсоединения/отсоединения передачи энергии, происходящее тогда, когда транспортное средство переходит из последовательного режима движения, в котором в качестве движущего источника используется электродвигатель, в другой режим движения, в котором в качестве движущего источника используется по меньшей мере двигатель внутреннего сгорания, и способу управления им.
Известный уровень техники
В комбинированном последовательно-параллельном электрическом транспортном средстве (SPHV), раскрытом в Патентной литературе 1, при переходе транспортного средства из режима последовательного гибридного транспортного средства (SHV) в режим параллельного транспортного средства (PHV) без использования непрерывно регулируемой трансмиссии, механический момент электродвигателя регулируется в момент времени, когда скорость транспортного средства (скорость вращения электродвигателя) достигает заранее заданной величины VI, а скорость вращения электрогенератора постепенно приближается к скорости вращения электродвигателя. После этого включается муфта сцепления в момент времени, когда обе скорости вращения совпадают между собой, а скорость транспортного средства достигает заранее заданной величины V2, так что электрогенератор и электродвигатель механически соединяются между собой. Таким образом, в Патентной литературе 1 описывается, что разность скоростей вращения между электрогенератором и электродвигателем устраняется тогда, когда включается муфта сцепления, и поэтому при переключения режимов движения не возникает удар.
Литература родственной области техники
Патентная литература
Патентная литература 1: JP-3052753-B
Патентная литература 2: JP-H09-224304-A
Краткое изложение сущности изобретения
Проблемы, которые должны быть решены изобретением
В SPHV в соответствии с описанной выше Патентной литературой 1 совпадение скоростей вращения электрогенератора со скоростью вращения электродвигателя принимается в качестве условия подсоединения муфты сцепления, которое происходит тогда, когда режим движения переключается из режима SHV в режим PHV. Однако следует принимать во внимание, что при подсоединении муфты сцепления в таком состоянии, когда выходная величина электрогенератора отличается от выходной величины электродвигателя, удар будет возникать, хотя эти две скорости вращения и будут совпадать между собой. А именно, в SPHV в соответствии с Патентной литературой 1, не только скорость вращения электрогенератора должна совпадать со скоростью вращения электродвигателя, но также должны совпадать между собой и знаки соответствующих угловых скоростей вращения, а выходная величина электрогенератора должна приближаться к выходной величине электродвигателя.
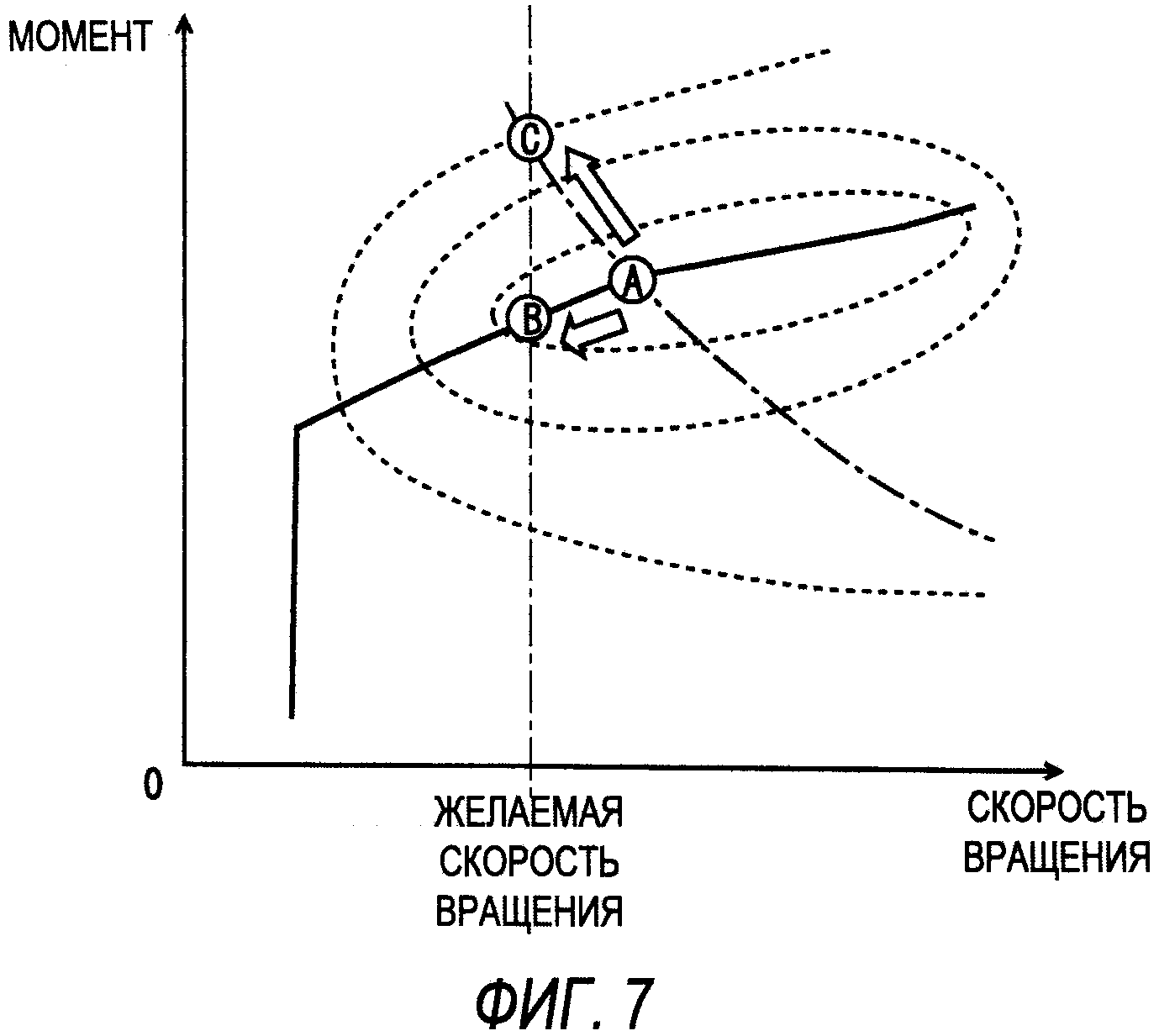
На Фиг.7 и Фиг.8 показан один пример характеристики двигателя внутреннего сгорания, который приводит в движение электрогенератор. На Фиг.7 и Фиг.8 по оси ординат показывается механический момент двигателя внутреннего сгорания, а по оси абсцисс показывается скорость вращения двигателя внутреннего сгорания. Толстые сплошные линии на Фиг.7 и Фиг.8 являются линиями, которые соединяют рабочие точки двигателя внутреннего сгорания, где достигается оптимальный показатель потребления топлива (в дальнейшем именуется как "нижняя линия BSFC"). Когда транспортное средство находится в режиме SHV, двигатель внутреннего сгорания работает в рабочей точке на этой линии. Кроме того, на Фиг.7 и Фиг.8 чередующиеся длинные и короткие пунктирные линии представляют собой линии, которые соединяют рабочие точки двигателя внутреннего сгорания, где выходные значения двигателя внутреннего сгорания становятся идентичными, хотя механические моменты и скорости вращения являются при этом различными (в дальнейшем именуется как "линия равных значений выходной величины").
Когда режим движения SPHV в соответствии с Патентной литературой 1 представляет собой режим SHV и происходит переключение на режим PHV из состояния, когда двигатель внутреннего сгорания работает в рабочей точке А, которая показана на Фиг.7, скорость вращения двигателя внутреннего сгорания падает до величины, показанной на Фиг.7 двойной штрихпунктирной линией (желаемая скорость вращения), для того, чтобы скорость вращения электрогенератора приближалась к скорости вращения электродвигателя. Если в этом случае пытаться поддерживать на прежнем уровне показатель потребления топлива, то рабочая точка сдвинется от А к В вдоль нижней линии BSFC. В результате этого, как механический момент двигателя внутреннего сгорания, так и его скорость вращения также понизятся, и поэтому выходная величина двигателя внутреннего сгорания уменьшается. Когда это происходит, электрогенератор не сможет генерировать всю электрическую энергию, которая требуется для электродвигателя, что приводит к возникновению ситуации, в которой недостающая часть электрической энергии выдается аккумуляторной батареей.
С одной стороны, когда рабочая точка сдвигается от А к С вдоль линии равных значений выходной величины, поддерживая тем самым выходную величину двигателя внутреннего сгорания при тех же самых условиях, рабочая точка отклоняется от нижней линии BSFC и поэтому показатель потребления топлива ухудшается.
С другой стороны, это будет происходить и в случае, когда механический момент двигателя внутреннего сгорания изменяется при переключении режима движения из режима SHV в режим PHV. Когда происходит переключение на режим PHV из состояния, в котором двигатель внутреннего сгорания работает в рабочей точке А, как это показано на Фиг.8, механический момент двигателя внутреннего сгорания падает до величины, показанной двойной штрихпунктирной линией на Фиг.8 (желаемый механический момент). Если в этом случае пытаться поддерживать показатель потребления топлива, то рабочая точка сдвигается от А к D вдоль нижней линии BSFC. В результате, скорость вращения электрогенератора, которая соответствует скорости вращения двигателя внутреннего сгорания, не совпадает со скоростью вращения электродвигателя, и поэтому можно предположить, что возникнет удар, когда в этом состоянии будет подсоединяться муфта сцепления. Далее, как механический момент двигателя внутреннего сгорания, так и его скорость вращения понизятся, и поэтому выходная величина двигателя внутреннего сгорания уменьшается. Когда это происходит, электрогенератор не сможет генерировать всю электрическую энергию, которая требуется для электродвигателя, что приводит к возникновению ситуации, в которой недостающая часть электрической энергии выдается аккумуляторной батареей.
С другой стороны, когда рабочая точка умышленно сдвигается от А к Е вдоль линии равных значений выходной величины, поддерживая тем самым выходную величину двигателя внутреннего сгорания при тех же самых условиях, рабочая точка отклоняется от нижней линии BSFC и поэтому показатель потребления топлива ухудшается.
Целью настоящего изобретения является предоставление гибридного транспортного средства, которое может подсоединять блок подсоединения/отсоединения передачи энергии без возникновения удара и ухудшения коэффициента полезного действия, когда транспортное средство переходит из последовательного режима движения, в котором в качестве движущего источника используется электродвигатель, к другому режиму движения, в котором в качестве движущего источника используется по меньшей мере двигатель внутреннего сгорания, и способа управления гибридным транспортным средством.
Средства решения этих проблем
Для достижения целей, позволяющих решить упомянутые проблемы, настоящее изобретение, в соответствии с пунктом 1, предусматривает
гибридное транспортное средство, содержащее:
двигатель внутреннего сгорания (например, двигатель внутреннего сгорания 111 в примере осуществления),
электрогенератор, (например, электрогенератор 113 в примере осуществления), который приводится в движение упомянутым двигателем внутреннего сгорания и генерирует электроэнергию,
аккумуляторную батарею, (например, аккумуляторная батарея 101 в примере осуществления), которая питает электроэнергией электродвигатель,
упомянутый электродвигатель, (например, электродвигатель 109 в примере осуществления), который подсоединен к ведущим колесам (например, ведущие колеса 133 в примере осуществления), и который приводится в движение электроэнергией, подаваемой по меньшей мере от упомянутой аккумуляторной батареи или упомянутого электрогенератора, и
блок подсоединения/отсоединения передачи энергии, (например, муфта сцепления 117 в примере осуществления), который расположен между упомянутым электрогенератором и упомянутыми ведущими колесами, для подсоединения и отсоединения линии передачи энергии от упомянутого двигателя внутреннего сгорания к упомянутым ведущим колесам через упомянутый электрогенератор, при этом гибридное транспортное средство может перемещаться энергией, подаваемой по меньшей мере от упомянутого электродвигателя или упомянутого двигателя внутреннего сгорания,
гибридное транспортное средство также содержащее:
блок управления двигателем внутреннего сгорания (например, блок управления ECU 123 в примере осуществления) для управления работой упомянутого двигателя внутреннего сгорания, и
блок управления подсоединением/отсоединением (например, блок управления ECU 123 в примере осуществления) для управления упомянутым блоком подсоединения/отсоединения передачи энергии, который подсоединяется, когда гибридное транспортное средство переходит из последовательного режима движения, в котором в качестве движущего источника используется упомянутый электродвигатель, на другой режим движения, в котором в качестве движущего источника используется по меньшей мере упомянутый двигатель внутреннего сгорания,
блок вычисления требуемой выходной величины (например, блок управления ECU 123 в примере осуществления) для вычисления требуемой выходной величины, необходимой для гибридного транспортного средства, базируясь на степени открытия педали акселератора, которая соответствует усилию на педали акселератора, и скорости движения гибридного транспортного средства, и
блок вычисления скорости вращения при подсоединении (например, блок управления ECU 123 в примере осуществления) для вычисления скорости вращения ведущих колес со стороны упомянутого блока подсоединения/отсоединения передачи энергии, которая соответствует скорости гибридного транспортного средства, как скорости вращения упомянутого двигателя внутреннего сгорания, на которой подсоединяется упомянутый блок подсоединения/отсоединения передачи энергии,
при этом упомянутый блок управления подсоединением/отсоединением управляет блоком подсоединения/отсоединения передачи энергии, который подсоединяется, когда скорость вращения упомянутого двигателя внутреннего сгорания совпадает со скоростью вращения при подсоединении, вычисленной упомянутым блоком вычисления скорости вращения при подсоединении, в результате управления упомянутым двигателем внутреннего сгорания, соответствующего требуемой выходной величине, вычисленной упомянутым блоком вычисления требуемой выходной величины, когда гибридное транспортное средство перемещается при последовательном режиме движения с заранее заданной скоростью или быстрее.
Кроме того, изобретение по пункту 2, основанное на пункте 1, предусматривает гибридное транспортное средство, отличающееся тем, что когда скорость вращения упомянутого двигателя внутреннего сгорания выше, чем упомянутая скорость вращения при подсоединении, в то время как это гибридное транспортное средство перемещается при последовательном режиме движения с заранее заданной скоростью или быстрее, то упомянутый блок управления двигателем внутреннего сгорания управляет так, что упомянутый двигатель внутреннего сгорания работает на линии оптимального потребления топлива, которая соединяет рабочие точки, где достигается оптимальный показатель потребления топлива, в соответствии с упомянутой требуемой выходной величиной.
Кроме того, изобретение по пункту 3, основанное на пунктах 1 или 2, предусматривает
гибридное транспортное средство, отличающееся тем, что когда скорость вращения упомянутого двигателя внутреннего сгорания ниже, чем упомянутая скорость вращения при подсоединении, в то время как гибридное транспортное средство движется при последовательном режиме движения с заранее заданной скоростью или быстрее, то упомянутый блок управления двигателем внутреннего сгорания управляет так, что упомянутый двигатель внутреннего сгорания работает на линии равных значений выходной величины, которая соединяет рабочие точки, где может поддерживаться выходная величина, соответствующая упомянутой требуемой выходной величине.
Кроме того, изобретение по пункту 4, основанное на пункте 3, предусматривает
гибридное транспортное средство, отличающееся тем, что коэффициент полезного действия передачи энергии от упомянутого двигателя внутреннего сгорания на упомянутые ведущие колеса в рабочей точке, на которую рабочая точка упомянутого двигателя внутреннего сгорания приходит после перехода по упомянутой линии равных значений выходной величины, где скорость вращения упомянутого двигателя внутреннего сгорания совпадает с упомянутой скоростью вращения при подсоединении, будет лучше по механическому коэффициенту полезного действия, чем по электрическому коэффициенту полезного действия.
Кроме того, изобретение по пункту 5, основанное на пунктах 3 или 4, предусматривает
гибридное транспортное средство, отличающееся тем, что упомянутый блок управления двигателем внутреннего сгорания при повышении упомянутой требуемой выходной величины после подсоединения упомянутого блока подсоединения/отсоединения передачи энергии управляет упомянутым двигателем внутреннего сгорания так, что повышает механический момент с сохранением, при этом упомянутой скорости вращения при подсоединении до тех пор, пока рабочая точка упомянутого двигателя внутреннего сгорания не достигнет линии оптимального показателя потребления топлива, и
при этом, когда упомянутая требуемая выходная величина будет превышать выходную величину упомянутого двигателя внутреннего сгорания в рабочей точке на упомянутой линии оптимального показателя потребления топлива, упомянутый электродвигатель, который приводится движение электроэнергией, подаваемой от упомянутой аккумуляторной батареи, будет выдавать недостающую часть выходной величины упомянутого двигателя внутреннего сгорания, соответствующую упомянутой требуемой выходной величине.
Кроме того, изобретение по пункту 6, основанное на пункте 5, предусматривает
гибридное транспортное средство, отличающееся тем, что упомянутый электродвигатель выдает упомянутую недостающую часть выходной величины в диапазоне возможной поддержки выходной величины, соответствующем состоянию упомянутой аккумуляторной батареи.
Кроме того, изобретение по пункту 7 предусматривает,
способ управления гибридным транспортным средством, где гибридное транспортное средство содержит:
двигатель внутреннего сгорания (например, двигатель внутреннего сгорания 111 в примере осуществления),
электрогенератор (например, электрогенератор 113 в примере осуществления), который приводится в движение упомянутым двигателем внутреннего сгорания и генерирует электроэнергию,
аккумуляторную батарею (например, аккумуляторная батарея 101 в примере осуществления), которая питает электроэнергией электродвигатель,
упомянутый электродвигатель (например, электродвигатель 109 в примере осуществления), который подсоединен к ведущим колесам (например, ведущие колеса 133 в примере осуществления) и которые приводятся в движение электроэнергией, подаваемой по меньшей мере от упомянутой аккумуляторной батареи или упомянутого электрогенератора, и
блок подсоединения/отсоединения передачи энергии (например, муфта сцепления 117 в примере осуществления), который расположен между упомянутым электрогенератором и упомянутыми ведущими колесами, для подсоединения и отсоединения линии передачи энергии от упомянутого двигателя внутреннего сгорания к упомянутым ведущим колесам через упомянутый электрогенератор, при этом гибридное транспортное средство может перемещаться от энергии, подаваемой по меньшей мере от упомянутого электродвигателя или упомянутого двигателя внутреннего сгорания, а упомянутый способ управления содержит:
вычисление скорости вращения на ведущих колесах со стороны упомянутого блока подсоединения/отсоединения передачи энергии, которая соответствует скорости гибридного транспортного средства, как скорости вращения упомянутого двигателя внутреннего сгорания, при которой подсоединяется упомянутый блок подсоединения/отсоединения передачи энергии, когда гибридное транспортное средство движется при последовательном режиме движения, в котором в качестве движущего источника используется упомянутый электродвигатель,
вычисление требуемой выходной величины, необходимой для гибридного транспортного средства, базируясь на величине открытия педали акселератора, которая соответствует усилию на педали акселератора, и скорости движения гибридного транспортного средства, и
подсоединение упомянутого блока подсоединения/отсоединения передачи энергии, когда скорость вращения упомянутого двигателя внутреннего сгорания совпадает с упомянутой вычисленной скоростью вращения при подсоединении в результате управления упомянутым двигателем внутреннего сгорания таким, чтобы соответствовать упомянутой вычисленной требуемой выходной величине, когда это гибридное транспортное средство переходит из последовательного режима движения с заранее заданной скоростью средства или быстрее на режим движения, в котором в качестве движущего источника используется по меньшей мере упомянутый двигатель внутреннего сгорания.
Преимущества изобретения
В соответствии с пунктами 1-6 гибридного транспортного средства настоящего изобретения, и в соответствии с пунктом 7 способа управления гибридным транспортным средством настоящего изобретения, когда транспортное средство переходит из режима последовательного движения, в котором в качестве движущего источника используется электродвигатель, на другой режим движения, в котором в качестве движущего источника используется по меньшей мере двигатель внутреннего сгорания, блок подсоединения/отсоединения передачи энергии может быть подсоединен без возникновения удара и без снижения коэффициента полезного действия.
В соответствии с гибридным транспортным средством изобретения по пункту 2, двигатель внутреннего сгорания продолжает работать на линии оптимального показателя потребления топлива, а блок подсоединения/отсоединения передачи энергии подсоединяется, когда скорость вращения двигателя внутреннего сгорания совпадает со скоростью вращения при подсоединении и поэтому показатель потребления топлива двигателя внутреннего сгорания не уменьшается.
В соответствии с гибридным транспортным средством изобретения по пунктам 3 и 4, показатель потребления топлива двигателем внутреннего сгорания понижается, поскольку рабочая точка двигателя внутреннего сгорания на линии равных значений выходной величины сдвигается. Однако, на рабочей точке двигателя внутреннего сгорания, где блок подсоединения/отсоединения передачи энергии отсоединяется, механический коэффициент полезного действия будет лучше, чем электрический коэффициент полезного действия, и поэтому гибридное транспортное средство может двигаться с более высоким полным коэффициентом полезного действия, чем полный коэффициент полезного действия, который был бы в том случае, когда гибридное транспортное средство продолжало бы перемещаться в последовательном режиме движения.
В соответствии с гибридным транспортным средством изобретения по пунктам 5 и 6, электродвигатель выдает электрическую энергию, представляющую собой недостающую часть выходной величины двигателя внутреннего сгорания, на которую требуемая выходная величина превосходит выходную величину двигателя внутреннего сгорания в рабочей точке на линии оптимального потребления топлива. Поэтому двигатель внутреннего сгорания может продолжать работать, сохраняя при этом более высокий полный коэффициент полезного действия.
Краткое описание фигур чертежей
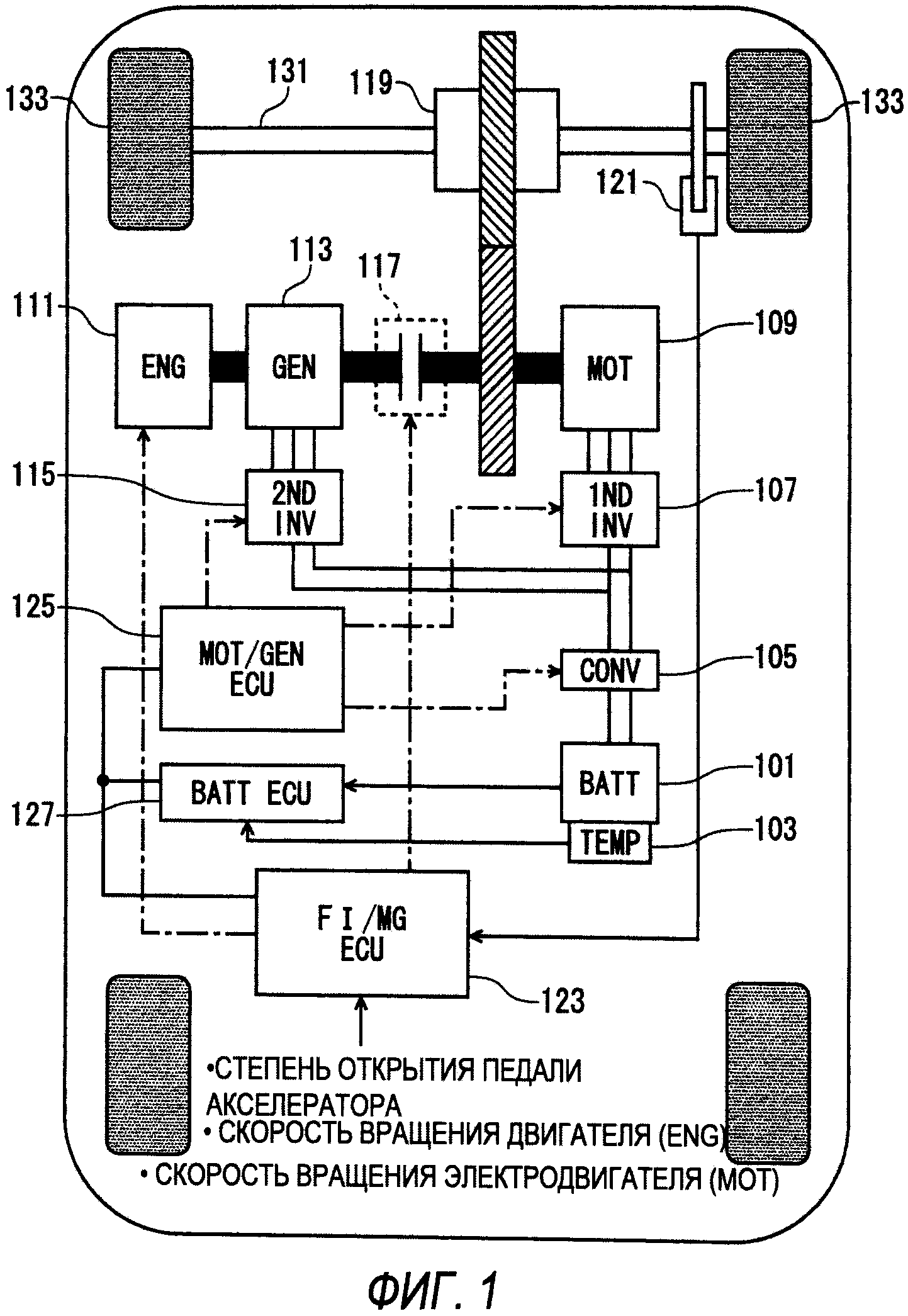
Фиг.1 - показывает внутреннюю блок-схему последовательно/параллельного HEV.
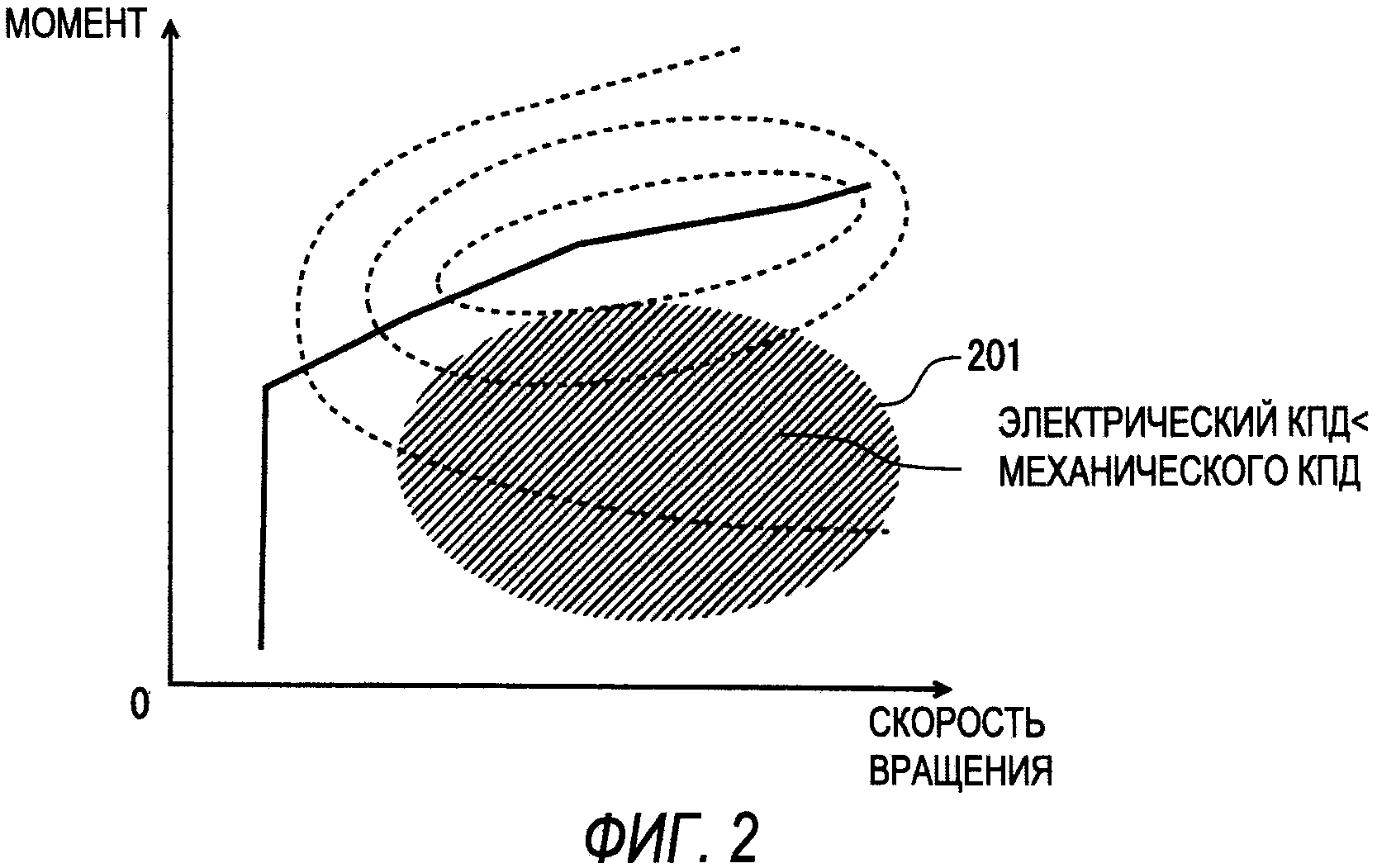
Фиг.2 - показывает графики характеристик двигателя внутреннего сгорания 111 в зависимости от теплового коэффициента полезного действия.
Фиг.3-показывает переход рабочей точки двигателя внутреннего сгорания 111, когда скорость вращения двигателя внутреннего сгорания 111 во время последовательного режима движения больше, чем скорость вращения, при которой подсоединяется муфта сцепления 117.
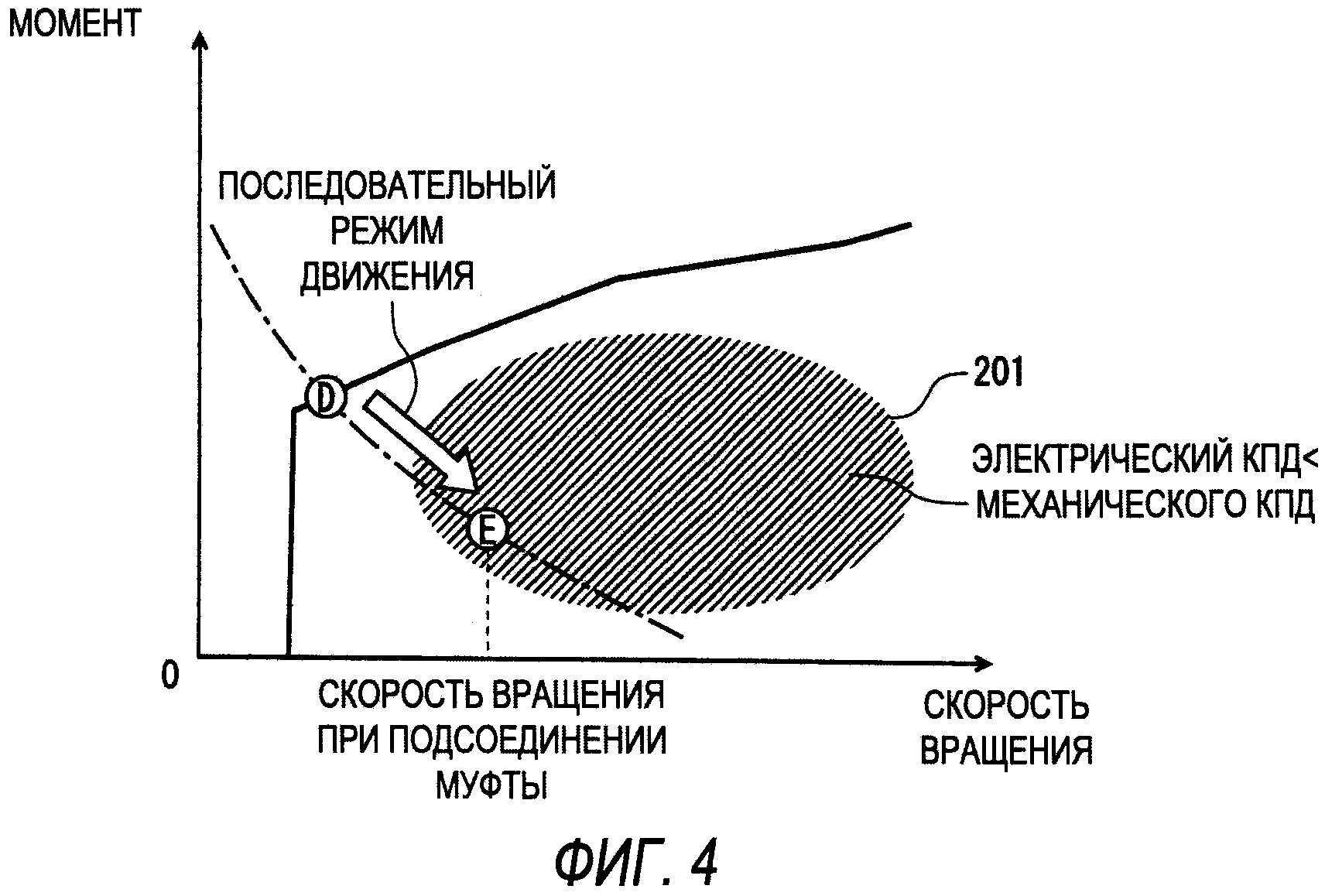
Фиг.4 - показывает переход рабочей точки двигателя внутреннего сгорания 111, когда скорость вращения двигателя внутреннего сгорания 111 во время последовательного режима движения меньше, чем скорость вращения, при которой подсоединяется муфта сцепления 117.
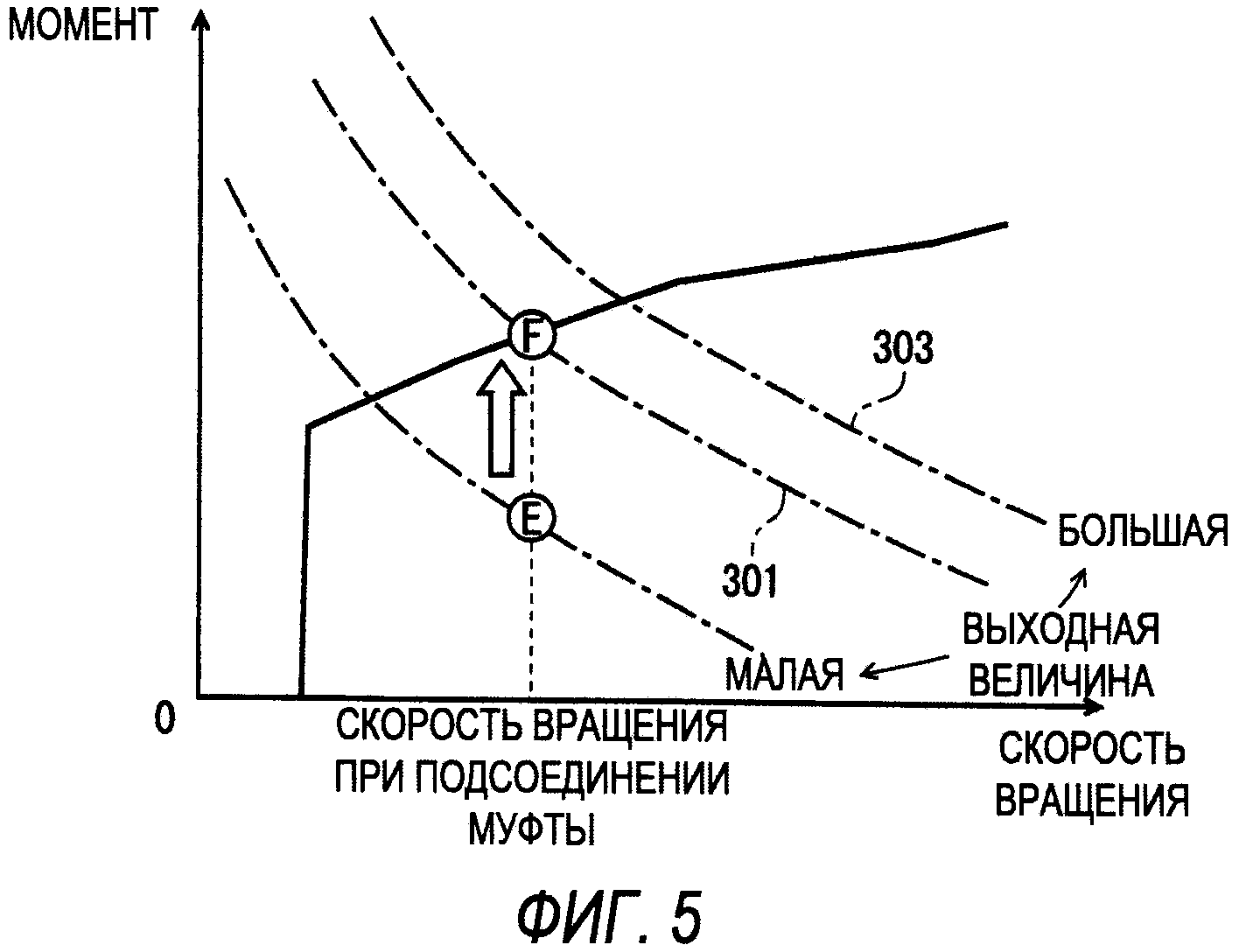
Фиг.5 - показывает переход рабочей точки двигателя внутреннего сгорания 111, когда требуемая выходная мощность повышается после подсоединения муфты сцепления 117.
Фиг.6 - блок-схема, показывающая работу блока управления ECU 123.
Фиг.7 - график, показывающий один из примеров характеристики двигателя внутреннего сгорания, который приводит в движение электрогенератор.
Фиг.8 - график, показывающий один из примеров характеристики двигателя внутреннего сгорания, который приводит в движение электрогенератор.
Формы осуществления изобретения
Далее будут описаны примеры осуществления настоящего изобретения со ссылками на прилагаемые фигуры чертежей.
HEV (гибридное транспортное средство) содержит электродвигатель и двигатель внутреннего сгорания, и перемещается движущей силой электродвигателя и/или двигателя внутреннего сгорания в зависимости от условий движения транспортного средства. Все HEV можно грубо классифицировать по двум типам: последовательный тип HEV и параллельный тип HEV. HEV последовательного типа перемещается движущей силой электродвигателя. При этом двигатель внутреннего сгорания используется только для генерации электрической энергии, а электрическая энергия, сгенерированная при использовании движущей силы двигателя внутреннего сгорания, накапливается аккумуляторной батареей или подается на электродвигатель. С другой стороны, HEV параллельного типа перемещается движущей силой только электродвигателя или только двигателя внутреннего сгорания или же обоих двигателей.
Известен также последовательно/параллельный HEV, в котором комбинируются обе конфигурации - последовательная и параллельная. В этом типе HEV муфта сцепления подсоединяется или отсоединяется (подсоединяется/отсоединяется) в зависимости от условий движения транспортного средства, при этом система передачи движущей силы переключается на последовательную или параллельную конфигурацию. В частности, когда транспортное средство движется при малой скорости, муфта сцепления отсоединяется для перехода на последовательную конфигурацию, а когда транспортное средство движется при средней или высокой скорости, муфта сцепления подсоединяется для перехода на параллельную конфигурацию. В последующем описании режим движения, использующий последовательную конфигурацию, будет именоваться как "последовательный режим движения".
В приведенном ниже примере осуществления гибридное транспортное средство, в соответствии с настоящим изобретением, будет описываться как последовательно/параллельное HEV (именуемое далее как "гибридное транспортное средство"). На Фиг.1 показана конфигурация внутренних блоков последовательно/параллельного HEV. Гибридное транспортное средство, показанное на Фиг.1, содержит аккумуляторную батарею (ВАТТ) 101, датчик температуры (TEMP) 103, преобразователь (CONV) 105, первый инвертор (1st INV) 107, электродвигатель (МОТ) 109, двигатель внутреннего сгорания (ENG) 111, электрогенератор (GEN) 113, второй инвертор (2nd INV) 115, муфту сцепления (в дальнейшем именуемая просто как "муфта") 117, коробку передач (в дальнейшем именуемая просто как "шестерня") 119, датчик скорости транспортного средства 121, блок управления ECU (FI/MG ECU) 123, ECU электродвигателя (MOT/GEN ECU) 125 и ECU аккумуляторной батареи (ВАТТ ECU) 127. Далее, транспортное средство содержит датчик (не показан) для измерения скорости вращения электродвигателя 109 и датчик (не показан) для измерения скорости вращения двигателя внутреннего сгорания 111.
Аккумуляторная батарея 101 имеет несколько аккумуляторных элементов, которые соединены последовательно и обеспечивают на выходе высокое напряжение, например, от 100 В до 200 В. Аккумуляторные элементы являются ионно-литиевыми батареями или гибридными никелевыми батареями. Датчик температуры 103 измеряет температуру аккумуляторной батареи 101 (в дальнейшем именуемую как "температура аккумуляторной батареи"). Сигнал, указывающий температуру аккумуляторной батареи, которая измерена датчиком температуры 103, посылается на ECU аккумуляторной батареи 127.
Преобразователь 105 повышает или понижает выходное напряжение постоянного тока аккумуляторной батареи 101. Первый инвертор 107 преобразует напряжение постоянного тока в напряжение переменного тока и питает трехфазным током электродвигатель 109. Кроме того, первый инвертор 107 преобразует напряжение переменного тока, выдаваемое электродвигателем 109, когда он работает в режиме рекуперации, в напряжение постоянного тока, который запасается в аккумуляторной батарее 101.
Электродвигатель 109 генерирует движущую силу, которая обеспечивает перемещение транспортного средства. Механический момент, созданный электродвигателем 109, передается на ведущие валы 131 через шестерню 119. Заметим, что ротор электродвигателя 109 подсоединен непосредственно к шестерне 119. Кроме того, электродвигатель 109 работает как электрогенератор при воздействии на него рекуперативных тормозов, и электрическая энергия, генерируемая электродвигателем 109, запасается в аккумуляторной батарее 101.
Когда гибридное транспортное средство перемещается в последовательном режиме движения с отсоединенной муфтой 117, то двигатель внутреннего сгорания 111 используется только для электрогенератора 113. Однако, когда муфта 117 подсоединяется, то выходная величина двигателя внутреннего сгорания 111 передается на ведущие валы 131 через электрогенератор 113, муфту 117 и шестерню 119, как механическая энергия, которая необходима для перемещения гибридного транспортного средства. Двигатель внутреннего сгорания 111 подсоединен непосредственно к ротору электрогенератора 113.
Электрогенератор 113 генерирует электрическую энергию, используя для этого механическую энергию двигателя внутреннего сгорания 111. Электрическая энергия, сгенерированная электрогенератором 113, накапливается в аккумуляторной батарее 101 или подается на электродвигатель 109. Второй инвертор 115 преобразует переменный ток, сгенерированный в электрогенераторе 113, в напряжение постоянного тока. Электрическая мощность, преобразованная вторым инвертором 115, накапливается в аккумуляторной батарее 101 или подается на электродвигатель 109 через первый инвертор 107.
Муфта 117 подсоединяет или отсоединяет линию передачи движущей силы от двигателя внутреннего сгорания 111 к ведущим колесам 133, базируясь на команде от блока управления ECU 123. Шестерня 119 является односкоростной фиксированной шестерней, которая соответствует, например, пятой скорости. Следовательно, шестерня 119 преобразует движущую силу от двигателя внутреннего сгорания 111 через электрогенератор 113 или движущую силу от электродвигателя 109 в скорость вращения и механический момент при определенном передаточном числе для передачи на ведущие валы 131. Датчик скорости транспортного средства 121 измеряет скорость движения транспортного средства (скорость транспортного средства). Сигнал, показывающий скорость транспортного средства, которая измерена датчиком скорости транспортного средства 121, посылается на блок управления ECU 123.
Блок управления ECU 123 вычисляет требуемую выходную величину, базируясь на степени открытия педали акселератора, которая соответствует усилию на педали акселератора, создаваемому водителем гибридного транспортного средства, и скорости транспортного средства, переключает систему передачи движущей силы, управляет подсоединением или отсоединением муфты 117 и управляет двигателем внутреннего сгорания 111. Процесс управления двигателем внутреннего сгорания 111 блоком управления ECU 123 показывается чередующимися длинными и короткими пунктирами на Фиг.1. Подробное описание блока управления ECU 123 будет представлено позднее.
ECU электродвигателя 125 управляет переключением переключающих элементов, которые являются частью преобразователя 105, первого инвертора 107 и второго инвертора 115, управляя тем самым работой электродвигателя 109 или электрогенератора 113. Управление преобразователем 105, первым инвертором 107 и вторым инвертором 115, осуществляемое ECU электродвигателя 125, показывается чередующимися длинными и короткими пунктирами на Фиг.1.
ECU аккумуляторной батареи 127 вычисляет состояние заряда (SOC) аккумуляторной батареи 101, базируясь на информации о температуре аккумуляторной батареи, которая получена от датчика температуры 103, токах заряда и разряда и напряжения на клеммах аккумуляторной батареи 101.
На Фиг.2 показываются характеристики двигателя внутреннего сгорания 111 в зависимости от его теплового коэффициента полезного действия. На Фиг.2 по оси ординат показывается механический момент двигателя внутреннего сгорания 111, а по оси абсцисс показывается скорость вращения двигателя внутреннего сгорания 111. Толстая сплошная линия на Фиг.2 является линией, которая соединяет рабочие точки двигателя внутреннего сгорания 111, где достигается оптимальный показатель потребления топлива (нижняя линия BSFC). Муфта 117 подсоединяется и отсоединяется в соответствии с выбранной системой передачи движущей силы. А именно, муфта 117 отсоединяется, когда транспортное средство движется в последовательном режиме движения, и подсоединяется, когда выходная энергия двигателя внутреннего сгорания 111 используется в качестве механической энергии.
Как описано выше, энергия на выходе двигателя внутреннего сгорания 111 является механической энергией. Однако, когда муфта 117 отсоединяется, механическая энергия, выдаваемая двигателем внутреннего сгорания 111, преобразуется в электрическую энергию электрогенератором 113 и после этого используется для перемещения транспортного средства. Коэффициент полезного действия передачи энергии, используемый здесь, именуется как "электрический коэффициент полезного действия", а форма передачи энергии, используемая здесь, именуется как "электрическая передача". С другой стороны, механическая энергия, выдаваемая двигателем внутреннего сгорания 111, когда муфта 117 подсоединяется, потребляется к тому же через электрогенератор 113 и шестерню 119 для движения транспортного средства. Коэффициент полезного действия передачи энергии, используемый здесь, именуется как "механический коэффициент полезного действия", а форма передачи энергии, используемая здесь, именуется как "механическая передача". Область 201, показанная штриховкой на Фиг.2, представляет собой область, где механический коэффициент полезного действия лучше, чем электрический коэффициент полезного действия, являясь коэффициентом полезного действия передачи выходной энергии двигателя внутреннего сгорания 111.
Далее со ссылками на Фиг.3 и Фиг.4 будет описан переход рабочей точки двигателя внутреннего сгорания 111, который происходит, в случае подсоединения муфты 117, когда гибридное транспортное средство настоящего примера осуществления перемещается в последовательном режиме движения. На Фиг.3 показывается график перехода рабочей точки двигателя внутреннего сгорания 111 для случая, когда скорость вращения двигателя внутреннего сгорания 111 во время последовательного режима движения будет больше, чем скорость вращения, при которой подсоединяется муфта 117. На Фиг.4 показывается график перехода рабочей точки двигателя внутреннего сгорания 111 для случая, когда скорость вращения двигателя внутреннего сгорания 111 во время последовательного режима движения будет меньше, чем скорость вращения, при которой подсоединяется муфта 117.
(Пример осуществления 1)
Рабочая точка А, показанная на Фиг.3, является рабочей точкой двигателя внутреннего сгорания 111, когда гибридное транспортное средство перемещается в последовательном режиме движения (ускоряется) за счет движущей силы, поступающей от электродвигателя 109 в соответствии с действиями водителя с педалью акселератора. При сбрасывании скорости вращения двигателя внутреннего сгорания 111 из этого состояния до величины (скорость вращения при подсоединении муфты), показанной на Фиг.3 пунктирной линией, где не возникает удара, хотя муфта 117 и подсоединяется, то когда будет обеспечено совпадение выходной величины на выходной стороне муфты 117 с выходной величиной электродвигателя 109, соответствуя при этом требуемой выходной величине, рабочая точка двигателя внутреннего сгорания 111 сдвинется от А к С вдоль линии равных значений выходной величины, показанной чередующимися длинными и короткими пунктирами. Когда это происходит, рабочая точка отклоняется от нижней линии BSFC и поэтому показатель потребления топлива понижается.
В настоящем примере осуществления блок управления ECU 123 не подсоединяет муфту 117 до тех пор, пока скорость вращения двигателя внутреннего сгорания 111 во время перемещения гибридного транспортного средства в последовательном режиме движения не станет ниже скорости вращения при подсоединении муфты А именно, когда рабочая точка двигателя внутреннего сгорания 111 сдвигается от А к В вдоль нижней линии BSFC, соответствуя при этом требуемой выходной величине так, что скорость вращения двигателя внутреннего сгорания 111 понизится до скорости вращения муфты при подсоединении, блок управления ECU осуществляет операцию управления, которой муфта 117 подсоединяется. Когда рабочая точка двигателя внутреннего сгорания 111 достигает рабочей точки В, скорость вращения электрогенератора 113 и скорость вращения двигателя внутреннего сгорания 111 совпадут, соответствующие знаки угловых скоростей вращения также совпадут, и посредством электрогенератора 113 выходная величина двигателя внутреннего сгорания 111 совпадет с выходной величиной электродвигателя 109. Следовательно, хотя в это время муфта 117 и подсоединяется, не возникнет удара, и по-прежнему будет сохраняться хороший показатель потребления топлива двигателем внутреннего сгорания 111.
(Пример осуществления 2)
Рабочая точка D, показанная на Фиг.4, является рабочей точкой двигателя внутреннего сгорания 111, когда гибридное транспортное средство перемещается в последовательном режиме движения (равномерное движение, уменьшение скорости), используя для этого движущую силу, поступающую от электродвигателя 109 в соответствии с действиями водителя с педалью акселератора. При сбрасывании скорости вращения двигателя внутреннего сгорания 111 из этого состояния до величины, показанной на Фиг.4 пунктирной линией, где не возникают удара (скорость вращения при подсоединении муфты), хотя муфта 117 и подсоединяется, то когда будет обеспечено совпадение выходной величины на выходной стороне муфты 117 с выходной величиной электродвигателя 109, соответствуя при этом требуемой выходной величине, рабочая точка двигателя внутреннего сгорания 111 сдвинется от D к Е вдоль линии равных значений выходной величины, показанной чередующимися длинными и короткими пунктирами. Таким образом, когда рабочая точка двигателя внутреннего сгорания 111 сдвигается к рабочей точке Е и скорость вращения двигателя внутреннего сгорания возрастает до скорости вращения при подсоединении муфты, блок управления ECU 123 осуществляет операцию управления, которой муфта 117 подсоединяется.
Когда рабочая точка подобным образом сдвигается от D к Е, показатель потребления топлива ухудшается, поскольку рабочая точка двигателя внутреннего сгорания 111 отклоняется от нижней линии BSFC. Однако, в отличие от примера осуществления 1, нагрузка (механический момент) двигателя внутреннего сгорания 111 сдвигается в направлении, в котором нагрузка (механический момент) понижается, и рабочая точка Е остается внутри области 201, где механическая передача будет лучше, чем электрическая передача. По этой причине при подсоединении муфты 117 удара не возникнет и будет получен более высокий полный коэффициент полезного действия (=показатель потребления топлива x электрический коэффициент полезного действия), который имел бы место, когда гибридное транспортное средство продолжало бы двигаться при последовательном режиме движения.
Если после того, как рабочая точка, как показано на Фиг.5, сдвинулась к точке Е требуемая выходная величина увеличивается, например, из-за перемещения педали акселератора водителем, то блок управления ECU 123 управляет двигателем внутреннего сгорания 111 так, что увеличивается механический момент при одновременном сохранении скорости вращения двигателя внутреннего сгорания 111 на скорости вращения при подсоединении муфты. Когда это происходит, рабочая точка двигателя внутреннего сгорания 111 сдвигается на Фиг.4 вверх от рабочей точки Е.
Когда в качестве требуемой выходной величины необходима, например, выходная величина, которая показана чередующимися длинными и короткими пунктирами, помеченными ссылочной цифрой 301, то блок управления ECU управляет двигателем внутреннего сгорания 111 так, что повышается механический момент при одновременном сохранении скорости вращения такой, чтобы работать на рабочей точке F на нижней линии BSFC. Далее, когда требуемая выходная величина повышается до выходной величины, показанной чередующимися длинными и короткими пунктирами, помеченными ссылочной цифровой 303, блок управления ECU 123 управляет двигателем внутреннего сгорания 111 так, чтобы оставаться работать на рабочей точке F, и выдает команду на ECU двигателя 125, в результате чего электродвигатель 109 выдает электрическую энергию, соответствующую недостающей части выходной величины (=требуемая выходная величина - выходная величина двигателя внутреннего сгорания 111). В это время электродвигатель 109 приводится в движение электрической энергией, подаваемой от аккумуляторной батареи 101. Следовательно, двигатель внутреннего сгорания 111 может продолжать работать, сохраняя при этом хороший полный коэффициент полезного действия.
Однако, здесь может возникнуть такая ситуация, что зависит от состояния аккумуляторной батареи 101, при которой электродвигатель 109 не может выдавать электрическую энергию, соответствующую недостающей части выходной величины. Ситуация, при которой аккумуляторная батарея 101 не сможет выдавать электрическую энергию, необходимую для электродвигателя 109, может возникнуть, например, тогда, когда остаточная емкость (SOC: состояние заряда батареи) аккумуляторной батареи 101 является небольшой. Кроме того, когда температура аккумуляторной батареи 101 является низкой, электрическая энергия, выдаваемая от аккумуляторной батареи 101, уменьшается. Следовательно, блок управления ECU 123 выдает команду на ECU электродвигателя 125 такую, по которой электродвигатель 109 выдает электрическую энергию, соответствующую недостающей части выходной величины, насколько это возможно в диапазоне возможной поддержки выходной величины в соответствии с SOC и температурой аккумуляторной батареи 101, получаемой от ECU аккумуляторной батареи 127. Далее, ECU аккумуляторной батареи 127 вычисляет SOC аккумуляторной батареи 101, базируясь на интегральной величине токов заряда и разряда аккумуляторной батареи 101 и напряжении на клеммах аккумуляторной батареи 101.
Далее, со ссылками на Фиг.6, будет описана работа блока управления ECU 123, куда входит управление двигателем внутреннего сгорания 111 и управление подсоединением муфты 117. На Фиг.6 представлена схема последовательности операций блока управления ECU 123. Когда гибридное транспортное средство перемещается в последовательном режиме движения, как показано на Фиг.6, блок управления ECU 123 вычисляет скорость вращения двигателя внутреннего сгорания 111, при которой не возникает удар даже тогда, когда муфта 117 подсоединяется (скорость вращения при подсоединении муфты) (этап S101). На этапе S101 блок управления ECU вычисляет скорость вращения ведущего вала 131, базируясь на скорости транспортного средства, полученной от датчика скорости транспортного средства 121 и радиуса ведущего колеса 133. Скорость вращения на выходной стороне подсоединенной муфты 117 вычисляется из скорости вращения ведущего вала 131 и передаточного числа шестерни 119. Поскольку двигатель внутреннего сгорания 111 подсоединен к муфте 117 через ротор электрогенератора 113, то скорость вращения, вычисленная таким образом, представляет собой скорость вращения при подсоединении муфты.
После завершения операции на этапе S101 блок управления ECU 123 устанавливает, будет или не будет скорость транспортного средства являться заранее заданной величиной или более высокой скоростью (этап S103). Если устанавливается, что скорость транспортного средства меньше, чем заранее заданная величина, то блок управления ECU 123 заканчивает операцию. С другой стороны, если устанавливается, что скорость транспортного средства является заранее заданной скоростью или более высокой скоростью, то блок управления ECU 123 устанавливает, является ли скорость вращения двигателя внутреннего сгорания 111 равной или не равной скорости вращения при подсоединении муфты (этап S105). Если устанавливается, что скорость вращения двигателя внутреннего сгорания 111 равна скорости вращения муфты при подсоединении, то блок управления ECU 123 переходит к этапу S107. Тогда как если же устанавливается, что скорость вращения двигателя внутреннего сгорания 111 не равна скорости вращения муфты при подсоединении, то блок управления ECU 123 переходит к этапу S109. На этапе S107 блок управления ECU 123 осуществляет управление подсоединением муфты 117.
На этапе S109 блок управления ECU 123 устанавливает, является или не является скорость вращения двигателя внутреннего сгорания 111 более низкой, чем скорость вращения муфты при подсоединении. Если устанавливается, что скорость вращения двигателя внутреннего сгорания 111 является более низкой, чем скорость вращения муфты при подсоединении, то блок управления ECU 123 переходит к этапу S111. Тогда как если устанавливается, что скорость вращения двигателя внутреннего сгорания 111 является более высокой, чем скорость вращения муфты при подсоединении, то блок управления ECU 123 возвращается на этап S105. На этапе S111 блок управления ECU 123 вычисляет требуемую выходную величину, базируясь на степени открытия педали акселератора, которая соответствует усилию водителя на педаль акселератора гибридного транспортного средства, и скорости транспортного средства. После этого блок управления ECU постепенно повышает скорость вращения двигателя внутреннего сгорания 111, поддерживая при этом выходную величину двигателя внутреннего сгорания 111.
На этапе S113, блок управления ECU 123 осуществляет управление двигателем внутреннего сгорания 111 и повышает скорость вращения до заранее заданной скорости вращения (например, 10 оборотов/мин). При этом блок управления ECU 123 осуществляет управление скоростью вращения двигателя внутреннего сгорания 111 электрогенератором 113, который является нагрузкой двигателя внутреннего сгорания 111. Затем блок управления ECU 123 осуществляет управление двигателем внутреннего сгорания 111 для получения выходного механического момента, который вычисляется из требуемого механического момента, определенного на этапе S111, и скорости вращения двигателя внутреннего сгорания 111, увеличенной на этапе S113 (этап S115), а затем возвращается к этапу S105.
Таким образом, в случае, когда в гибридном транспортном средстве настоящего примера осуществления проводится управление с использованием блока управления ECU 123, который был описан выше, муфта может быть подсоединена без возникновения каких-либо ударов или понижения коэффициента полезного действия (показателя потребления топлива или полного коэффициента полезного действия), когда транспортное средство переходит от последовательного режима движения к другому режиму движения, в котором в качестве движущего источника используется по меньшей мере двигатель внутреннего сгорания 111.
Хотя настоящее изобретение было подробно описано со ссылками на определенные примеры осуществления, однако специалистам в данной области техники будет понятно, что изобретение может иметь различные альтернативы и модификации без отклонения от сущности и объема изобретения.
Эта патентная заявка базируется на японской заявке на патент (№2009-285416), поданной 16 декабря 2009 г., содержание которой введено здесь ссылкой.
Описание ссылочных цифр и символов
101 - аккумуляторная батарея (ВАТТ);
103 - датчик температуры (TEMP);
105 - преобразователь (CONV);
107 - первый инвертор ((1st INV);
109 - электродвигатель (МОТ);
111 - Двигатель внутреннего сгорания (ENG);
113 - электрогенератор (GEN);
115 - второй инвертор (2nd INV);
117 - муфта сцепления;
119 - коробка передач;
121 - датчик скорости транспортного средства;
123 - блок управления ECU (FI/MG ECU);
125 - ECU электродвигателя (MOT/GEN ECU);
127 - ECU аккумуляторной батареи (ВАТТ ECU);
131 - ведущий вал;
133 - ведущее колесо
Реферат
Изобретение относится к гибридному транспортному средству. Гибридное транспортное средство содержит двигатель внутреннего сгорания; электрогенератор; аккумуляторную батарею; упомянутый электродвигатель; блок подсоединения/отсоединения передачи энергии; блок вычисления скорости вращения при подсоединении; блок управления двигателем внутреннего сгорания; блок управления подсоединением/отсоединением и блок вычисления требуемой выходной величины. При перемещении транспортного средства в последовательном режиме движения, блок управления двигателем управляет им так, что двигатель работает на линии равных значений выходной величины, которая соединяет рабочие точки, где может поддерживаться требуемая выходная величина. При работе на линии равных значений выходной величины, при подсоединении муфты удара не возникнет и будет получен более высокий полный коэффициент полезного действия. Изобретение также относится к способу управления гибридным транспортным средством согласно вышеуказанному устройству. Исключается удар муфты и повышается КПД при подсоединении передачи. 3 н.п. ф-лы, 8 ил.
Формула
двигатель внутреннего сгорания (111),
электрогенератор (113), который приводится в движение упомянутым двигателем внутреннего сгорания (111) и генерирует электроэнергию,
аккумуляторную батарею (101), которая питает электроэнергией электродвигатель (109),
упомянутый электродвигатель (109), который подсоединен к ведущим колесам (133) и который приводится в движение электроэнергией, подаваемой по меньшей мере от упомянутой аккумуляторной батареи (101) или упомянутого электрогенератора (113),
блок подсоединения/отсоединения передачи энергии (117), который расположен между упомянутым электрогенератором (113) и упомянутыми ведущими колесами (133), для подсоединения и отсоединения линии передачи энергии от упомянутого двигателя внутреннего сгорания (111) к упомянутым ведущим колесам (133) через упомянутый электрогенератор (113), при этом гибридное транспортное средство может перемещаться энергией, подаваемой по меньшей мере от упомянутого электродвигателя (109) или упомянутого двигателя внутреннего сгорания (111),
блок вычисления скорости вращения при подсоединении (123) для вычисления скорости вращения при подсоединении, при которой присоединяется сторона ведущих колес (133) и сторона упомянутого двигателя внутреннего сгорания (111) блока подсоединения/отсоединения передачи энергии (117),
блок управления двигателем внутреннего сгорания (123) для управления работой упомянутого двигателя внутреннего сгорания,
блок управления подсоединением/отсоединением (123) для управления упомянутым блоком подсоединения/отсоединения передачи энергии (117), который подсоединяется, когда скорость вращения упомянутого двигателя внутреннего сгорания (111) совпадает со скоростью вращения при подсоединении, в то время как гибридное транспортное средство переходит из последовательного режима движения, в котором упомянутый блок подсоединения/отсоединения передачи энергии (117) отсоединяется, и упомянутый электродвигатель (109), приводимый в движение электроэнергией, генерируемой электрогенератором (113), приводимым в движение упомянутым двигателем внутреннего сгорания (111), используется в качестве движущего источника, на режим движения прямого присоединения к двигателю внутреннего сгорания, в котором в качестве движущего источника используется упомянутый блок подсоединения/отсоединения передачи энергии (117) и по меньшей мере упомянутый двигатель внутреннего сгорания (111), и
блок вычисления требуемой выходной величины (123) для вычисления требуемой выходной величины, необходимой для гибридного транспортного средства, базируясь на степени открытия педали акселератора, которая соответствует усилию на педали акселератора, и скорости движения гибридного транспортного средства,
отличающееся тем, что когда гибридное транспортное средство перемещается при последовательном режиме движения с заранее заданной скоростью или быстрее и когда скорость вращения упомянутого двигателя внутреннего сгорания (111) ниже, чем упомянутая скорость вращения при подсоединении, то упомянутый блок управления двигателем внутреннего сгорания (123) управляет так, что упомянутый двигатель внутреннего сгорания (111) работает на линии равных значений выходной величины, которая соединяет рабочие точки, где может поддерживаться требуемая выходная величина, и
при этом в области (201), в которой скорость вращения упомянутого двигателя внутреннего сгорания (111) совпадает со скоростью вращения при подсоединении, в результате управления упомянутым двигателем внутреннего сгорания (111), при работе на линии равных значений выходной величины, при подсоединении муфты 117 удара не возникнет и будет получен более высокий полный коэффициент полезного действия, который имел бы место, когда гибридное транспортное средство продолжало бы двигаться при последовательном режиме движения.
двигатель внутреннего сгорания (111),
электрогенератор (113), который приводится в движение упомянутым двигателем внутреннего сгорания (111) и генерирует электроэнергию,
аккумуляторную батарею (101), которая питает электроэнергией электродвигатель
(109),
упомянутый электродвигатель (109), который подсоединен к ведущим колесам (133) и который приводится в движение электроэнергией, подаваемой по меньшей мере от упомянутой аккумуляторной батареи (101) или упомянутого электрогенератора (113),
блок подсоединения/отсоединения передачи энергии (117), который расположен между упомянутым электрогенератором (113) и упомянутыми ведущими колесами (133), для подсоединения и отсоединения линии передачи энергии от упомянутого двигателя внутреннего сгорания (111) к упомянутым ведущим колесам (133) через упомянутый электрогенератор (113), при этом гибридное транспортное средство может перемещаться энергией, подаваемой по меньшей мере от упомянутого электродвигателя (109) или упомянутого двигателя внутреннего сгорания (111),
блок вычисления скорости вращения при подсоединении (123) для вычисления скорости вращения при подсоединении, при которой присоединяется сторона ведущих колес (133) и сторона упомянутого двигателя внутреннего сгорания (111) блока подсоединения/отсоединения передачи энергии (117),
блок управления двигателем внутреннего сгорания (123) для управления работой упомянутого двигателя внутреннего сгорания,
блок управления подсоединением/отсоединением (123) для управления упомянутым блоком подсоединения/отсоединения передачи энергии (117), который подсоединяется, когда скорость вращения упомянутого двигателя внутреннего сгорания (111) совпадает со скоростью вращения при подсоединении, в то время как гибридное транспортное средство переходит из последовательного режима движения, в котором упомянутый блок подсоединения/отсоединения передачи энергии (117) отсоединяется, и упомянутый электродвигатель (109), приводимый в движение электроэнергией, генерируемой электрогенератором (113), приводимым в движение упомянутым двигателем внутреннего сгорания (111), используется в качестве движущего источника, на режим движения прямого присоединения к двигателю внутреннего сгорания, в котором в качестве движущего источника используется упомянутый блок подсоединения/отсоединения передачи энергии (117) и по меньшей мере упомянутый двигатель внутреннего сгорания (111),
отличающееся тем, что когда это гибридное транспортное средство перемещается при последовательном режиме движения с заранее заданной скоростью или быстрее и скорость вращения упомянутого двигателя внутреннего сгорания (111) выше, чем упомянутая скорость вращения при подсоединении, то упомянутый блок управления двигателем внутреннего сгорания (123) управляет так, что упомянутый двигатель внутреннего сгорания (111) работает на линии оптимального потребления топлива (нижняя линия BSFC), которая соединяет рабочие точки, где достигается оптимальный показатель потребления топлива, в соответствии с упомянутой требуемой выходной величиной.
где гибридное транспортное средство содержит:
двигатель внутреннего сгорания (111),
электрогенератор (113), который приводится в движение упомянутым двигателем внутреннего сгорания (111) и генерирует электроэнергию,
аккумуляторную батарею (101), которая питает электроэнергией электродвигатель (109),
упомянутый электродвигатель (109), который подсоединен к ведущим колесам (133) и который приводится в движение электроэнергией, подаваемой по меньшей мере от упомянутой аккумуляторной батареи (101) или упомянутого электрогенератора (113), и
блок подсоединения/отсоединения передачи энергии (117), который расположен между упомянутым электрогенератором (113) и упомянутыми ведущими колесами (133), для подсоединения и отсоединения линии передачи энергии от упомянутого двигателя внутреннего сгорания (111) к упомянутым ведущим колесам (133) через упомянутый электрогенератор (113), при этом гибридное транспортное средство может перемещаться от энергии, передаваемой по меньшей мере от упомянутого электродвигателя (109) или упомянутого двигателя внутреннего сгорания,
блок вычисления скорости вращения при подсоединении (123) для вычисления скорости вращения при подсоединении, при которой присоединяется сторона ведущих колес (133) и сторона упомянутого двигателя внутреннего сгорания (111) блока подсоединения/отсоединения передачи энергии (117),
блок управления двигателем внутреннего сгорания (123) для управления работой упомянутого двигателя внутреннего сгорания,
блок управления подсоединением/отсоединением (123) для управления упомянутым блоком подсоединения/отсоединения передачи энергии (117), который подсоединяется, когда скорость вращения упомянутого двигателя внутреннего сгорания (111) совпадает со скоростью вращения при подсоединении, в то время как гибридное транспортное средство переходит из последовательного режима движения, в котором упомянутый блок подсоединения/отсоединения передачи энергии (117) отсоединяется, и упомянутый электродвигатель (109), приводимый в движение электроэнергией, генерируемой электрогенератором (113), приводимым в движение упомянутым двигателем внутреннего сгорания (111), используется в качестве движущего источника, на режим движения прямого присоединения к двигателю внутреннего сгорания, в котором в качестве движущего источника используется упомянутый блок подсоединения/отсоединения передачи энергии (117) и по меньшей мере упомянутый двигатель внутреннего сгорания (111), и
блок вычисления требуемой выходной величины (123) для вычисления требуемой выходной величины, необходимой для гибридного транспортного средства, базируясь на степени открытия педали акселератора, которая соответствует усилию на педали акселератора, и скорости движения гибридного транспортного средства,
способ управления, включающий:
вычисление скорости вращения на ведущих колесах со стороны упомянутого блока подсоединения/отсоединения передачи энергии, которая соответствует скорости гибридного транспортного средства как скорости вращения упомянутого двигателя внутреннего сгорания, при которой подсоединяется упомянутый блок подсоединения/отсоединения передачи энергии, когда гибридное транспортное средство движется при последовательном режиме движения, в котором в качестве движущего источника используется упомянутый электродвигатель,
вычисление требуемой выходной величины, необходимой для гибридного транспортного средства, базируясь на величине открытия педали акселератора, которая соответствует усилию на педали акселератора, и скорости движения гибридного транспортного средства, и
подсоединение упомянутого блока подсоединения/отсоединения передачи энергии, когда скорость вращения упомянутого двигателя внутреннего сгорания совпадает с упомянутой вычисленной скоростью вращения при подсоединении в результате управления упомянутым двигателем внутреннего сгорания таким образом, чтобы соответствовать упомянутой вычисленной требуемой выходной величине, когда это гибридное транспортное средство движется при последовательном режиме движения с заранее заданной скоростью средства или быстрее,
при этом в области (201), в которой скорость вращения упомянутого двигателя внутреннего сгорания (111) совпадает со скоростью вращения при подсоединении, в результате управления упомянутым двигателем внутреннего сгорания (111), при работе на линии равных значений выходной величины, при подсоединении муфты 117 удара не возникнет и будет получен более высокий полный коэффициент полезного действия, который имел бы место, когда гибридное транспортное средство продолжало бы двигаться при последовательном режиме движения.
Комментарии