Способ управления остановом и пуском двигателя и моторное транспортное средство - RU2707180C2
Код документа: RU2707180C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к моторным транспортным средствам и, в частности, к способу управления остановом и пуском двигателя моторного транспортного средства, чтобы улучшать экономию топлива и снижать выбросы.
УРОВЕНЬ ТЕХНИКИ
Что касается транспортных средств с ручной трансмиссией, которые оснащены автоматическим управлением пуском/остановом двигателя, желательно доводить до максимума экономию топлива посредством использования автоматических глушений и перезапусков двигателя всякий раз, когда возможно. Системы пуска-останова с остановкой на нейтрали (SIN) в настоящее время применяются на рынке, но эти системы не доводят до максимума экономию топлива, поскольку многие водители ожидают на передаче в неподвижном транспортном средстве. Остановы с остановкой на нейтрали не вызываются в этих условиях, и требуется стратегия остановки на передаче (SIG).
Однако, для применения стратегии пуска-останова с остановкой на передаче (SIG), необходимо гарантировать, что привод на ведущие колеса расцеплен, чтобы предотвращать возникновение аварий или происхождение нежелательного движения транспортного средства. Остановы и пуски с остановкой на передаче типично могут осуществляться, если нажаты как педаль сцепления, так и тормозная педаль с трансмиссией на передаче. Однако чтобы гарантировать, что такая стратегия безопасна, если вызванный водителем запрос перезапуска принят, например, от отпускания тормозной педали, логике пуска-останова может быть разрешено проворачивать коленчатый вал двигателя, только если привод на ведущие колеса расцеплен, так как это предотвращает дергание или перемещение транспортного средства во время проворачивания коленчатого вала. Поэтому, современная практика состоит в том, чтобы использовать весьма консервативное пороговое значение положения педали сцепления для положения педали сцепления, которое должно быть достигнуто, если должен быть разрешен останов двигателя.
Есть два недостатка у использования такого консервативного порогового значения положения педали сцепления.
Во-первых, если водитель предоставляет педали сцепления возможность отходить назад в направлении включения сцепления, в то время как двигатель остановлен (по время увода педали), то двигатель в некоторых случаях не может быть перезапущен, так как положение педали сцепления будет пересекшим пороговое значение положения педали сцепления, и значит, считается небезопасным разрешать двигателю перезапускаться.
Во-вторых, во время трогания из состояния покоя, обычная практика состоит в том, чтобы водитель начинал включать сцепление одновременно с тем, что отпускается тормозная педаль, и водитель начинает нажимать педаль акселератора. Если синхронизация этих событий водителем слегка неверна, водитель может непреднамеренно предоставлять педали сцепления возможность перемещаться слишком быстро в направлении включения сцепления, тем самым, заставляя положение педали сцепления пересекать пороговое значение положения педали сцепления до того, как начато проворачивание коленчатого вала, тем самым, предотвращая перезапуск двигателя.
В обоих случаях, благоприятные возможности для пуска двигателя упускаются, и водитель может быть не удовлетворен работой системы пуска-останова до такой степени, что он будет ее отключать.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Цель этого изобретения состоит в том, чтобы предоставить способ управления остановом и пуском двигателя, который уменьшает количество упущенных благоприятных возможностей для перезапуска двигателя.
Согласно первому аспекту изобретения, предложен способ управления остановом и пуском двигателя моторного транспортного средства, присоединенного с возможностью приведения в действие к трансмиссии сцеплением с ручным управлением, при остающейся на передаче трансмиссии, включающий в себя этапы, на которых устанавливают первый пороговый предел выключения сцепления для выключенного сцепления, устанавливают второй пороговый предел выключения сцепления для включенного сцепления, используют первый пороговый предел выключения для принятия решения, разрешать ли двигателю останавливаться, и используют второй пороговый предел выключения сцепления для принятия решения, разрешать ли двигателю перезапускаться из остановленного состояния, при этом второй пороговый предел выключения сцепления устанавливается на в меньшей степени расцепленном состоянии сцепления, чем первый пороговый предел выключения сцепления, причем первый пороговый предел выключения сцепления устанавливают так, чтобы сцепление было расцеплено в достаточной мере для предотвращения передачи крутящего момента, а второй пороговый предел выключения сцепления устанавливают ближе к точке прихвата сцепления так, чтобы любой крутящий момент, который передается сцеплением, был недостаточным для перемещения моторного транспортного средства, в котором установлен двигатель.
В одном из вариантов предложен способ, в котором в состоянии сцепления более расцепленном, чем первый пороговый предел выключения сцепления, разрешают останов двигателя, если присутствует по меньшей мере одно событие инициации останова двигателя.
В одном из вариантов предложен способ, в котором в состоянии сцепления менее расцепленном, чем первый пороговый предел выключения сцепления, запрещают останов двигателя, даже если присутствует событие инициации останова двигателя.
В одном из вариантов предложен способ, в котором событие инициации останова двигателя присутствует, если определена нажатая тормозная педаль моторного транспортного средства.
В одном из вариантов предложен способ, в котором в состоянии сцепления более расцепленном, чем второй пороговый предел выключения сцепления, разрешают пуск двигателя, если присутствует по меньшей мере одно событие инициации пуска двигателя.
В одном из вариантов предложен способ, в котором в состоянии сцепления менее расцепленном, чем второй пороговый предел выключения сцепления, запрещают пуск двигателя, даже если присутствует событие инициации пуска двигателя.
В одном из вариантов предложен способ, в котором событие инициации пуска двигателя присутствует, если определено одно из отпущенной тормозной педали моторного транспортного средства или ее отпускания.
В одном из вариантов предложен способ, в котором событие инициации пуска двигателя присутствует, если определены отпущенная тормозная педаль моторного транспортного средства и нажатая педаль акселератора.
В одном из вариантов предложен способ, в котором сцепление приводится в действие системой привода сцепления, содержащей рабочий цилиндр, имеющий поршень, выполненный с возможностью перемещения выжимного подшипника сцепления, и датчик положения поршня рабочего цилиндра для обеспечения выходного сигнала, указывающего положение поршня рабочего цилиндра, при этом первый пороговый предел выключения сцепления является первым заданным значением выходного сигнала с датчика положения поршня рабочего цилиндра, и при величине выходного сигнала с датчика положения поршня рабочего цилиндра не меньше, чем первое заданное значение выходного сигнала с датчика положения поршня рабочего цилиндра, считают сцепление расцепленным в достаточной мере, чтобы разрешать глушение двигателя.
В одном из вариантов предложен способ, в котором сцепление приводится в действие системой привода сцепления, содержащей рабочий цилиндр, имеющий поршень, выполненный с возможностью перемещения выжимного подшипника сцепления, и датчик положения поршня рабочего цилиндра для обеспечения выходного сигнала, указывающего положение поршня рабочего цилиндра, при этом второй пороговый предел выключения сцепления является вторым заданным значением выходного сигнала с датчика положения поршня рабочего цилиндра, и при величине выходного сигнала с датчика положения поршня рабочего цилиндра не меньше, чем второе заданное значение выходного сигнала с датчика положения поршня в рабочем цилиндре, считают сцепление расцепленным в достаточной мере, чтобы разрешать пуск двигателя.
В одном из дополнительных аспектов предложено моторное транспортное средство, содержащее двигатель, присоединенный с возможностью приведения в действие к трансмиссии сцеплением с ручным управлением, электронный контроллер для управления остановом и пуском двигателя в ответ на входные сигналы с датчика, выполненного с возможностью выдачи сигнала инициации останова двигателя, датчика, выполненного с возможностью выдачи сигнала инициации пуска двигателя, и датчика, выполненного с возможностью выдачи сигнала, указывающего состояние зацепления сцепления, при этом электронный контроллер выполнен с возможностью установления первого порогового предела выключения сцепления для использования при выключенном сцеплении, установления второго порогового предела выключения сцепления для использования при включенном сцеплении, использования первого порогового предела выключения для принятия решения, разрешать ли глушение двигателя, и использования второго порогового предела выключения сцепления для принятия решения, разрешать ли двигателю перезапускаться, и установления второго порогового предела выключения сцепления на в меньшей степени расцепленном состоянии сцепления, чем первый пороговый предел выключения сцепления, причем первый пороговый предел выключения сцепления устанавливается так, чтобы сцепление было расцеплено в достаточной мере для предотвращения передачи крутящего момента сцеплением, а второй пороговый предел выключения сцепления устанавливается ближе к точке прихвата сцепления так, чтобы любой крутящий момент, который передается сцеплением, был недостаточным для перемещения моторного транспортного средства.
В одном из вариантов предложено транспортное средство, в котором сцепление выполнено с возможностью приведения в действие системой привода сцепления, содержащей рабочий цилиндр, имеющий поршень, выполненный с возможностью перемещения выжимного подшипника сцепления, и датчик положения поршня рабочего цилиндра для обеспечения выходного сигнала, указывающего положение поршня рабочего цилиндра.
В одном из вариантов предложено транспортное средство, в котором первый пороговый предел выключения сцепления является первым заданным значением выходного сигнала с датчика положения поршня рабочего цилиндра, причем электронный контроллер выполнен с возможностью определения того, что сцепление зацеплено в достаточной мере для разрешения останова двигателя, если величина выходного сигнала с датчика положения поршня рабочего цилиндра при проверке электронным контроллером не меньше, чем первое заданное значение выходного сигнала с датчика положения поршня рабочего цилиндра.
В одном из вариантов предложено транспортное средство, в котором двигатель выполнен с возможностью останова, если событие инициации останова присутствует, и сцепление расцеплено в достаточной мере для разрешения глушения двигателя.
В одном из вариантов предложено транспортное средство, в котором второй пороговый предел выключения сцепления является вторым заданным значением выходного сигнала с датчика положения поршня рабочего цилиндра, причем электронный контроллер выполнен с возможностью того, что сцепление расцеплено в достаточной мере для разрешения пуска двигателя, если величина выходного сигнала с датчика положения поршня рабочего цилиндра при проверке электронным контроллером не меньше, чем второе заданное значение выходного сигнала с датчика положения поршня рабочего цилиндра.
В одном из вариантов предложено транспортное средство, в котором двигатель выполнен с возможностью запуска, если событие инициации пуска присутствует, и сцепление расцеплено в достаточной мере для разрешения пуска двигателя.
В одном из вариантов предложено транспортное средство , в котором датчик, выполненный с возможностью выдачи сигнала инициации останова двигателя, является датчиком тормозной педали, используемым для контроля положения тормозной педали, и электронный контроллер выполнен с возможностью использования нажатия тормозной педали в качестве события инициации останова двигателя.
В одном из вариантов предложено транспортное средство, в котором датчик, выполненный с возможностью выдачи сигнала инициации пуска двигателя, является датчиком тормозной педали, используемым для контроля положения тормозной педали, и электронный контроллер выполнен с возможностью использования отпускания тормозной педали в качестве события инициации пуска двигателя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее, изобретение, в качестве примера будет описано со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - схематичное представление моторного транспортного средства, имеющего систему пуска-останова;
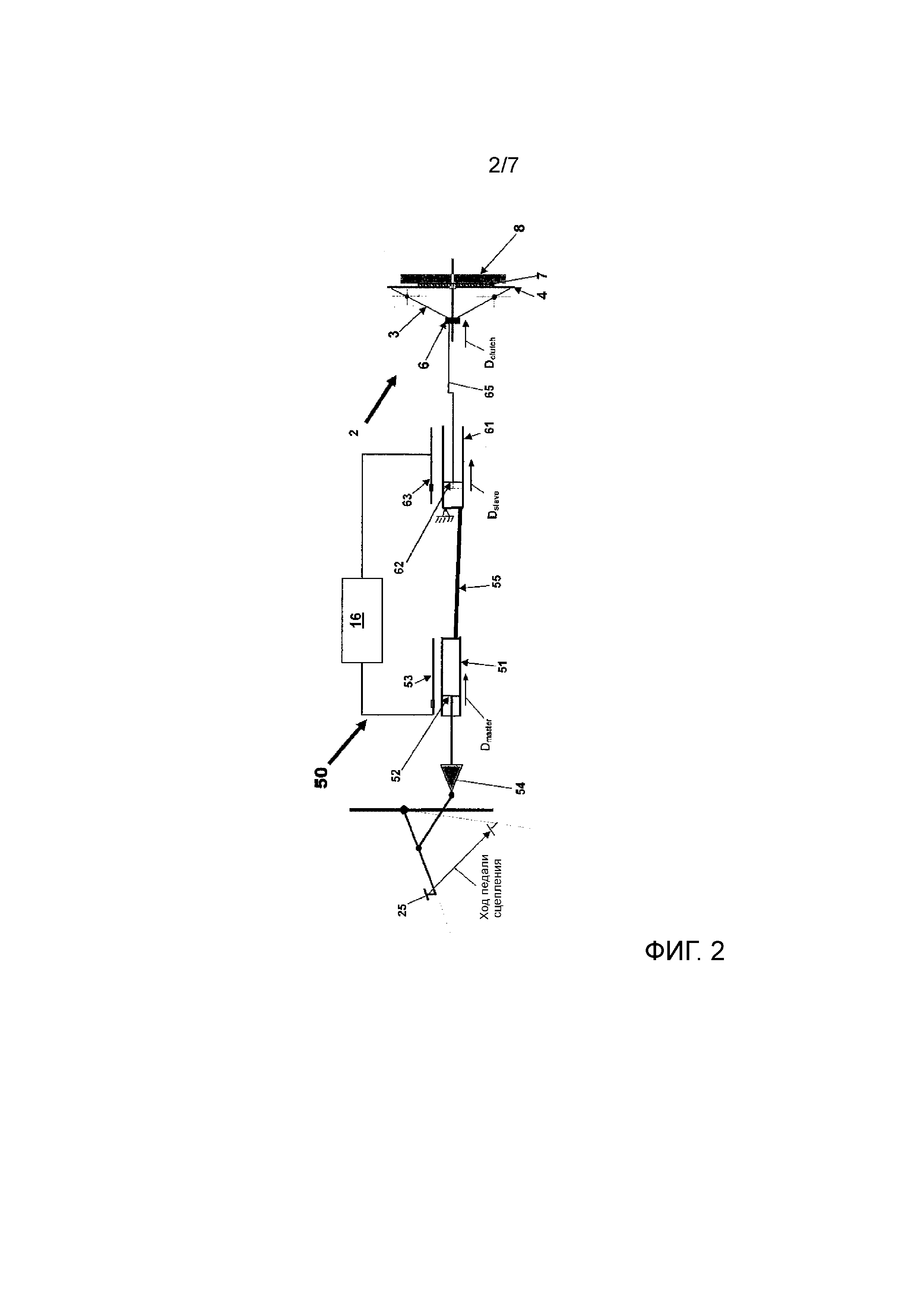
фиг.2 - схематичное изображение сцепления и системы привода сцепления, используемых в транспортном средстве, показанном на фиг.1;
фиг.3 - высокоуровневая блок-схема последовательности операций способа, показывающая действия, используемые для управления работой двигателя внутреннего сгорания, формирующего часть транспортного средства, показанного на фиг.1;
фиг.4 - высокоуровневая блок-схема последовательности операций способа, показывающая способ управления пуском и остановом двигателя, показанного на фиг.1;
фиг.5 - схема, показывающая различные положения педали сцепления и их взаимосвязь с тремя зонами зацепления сцепления;
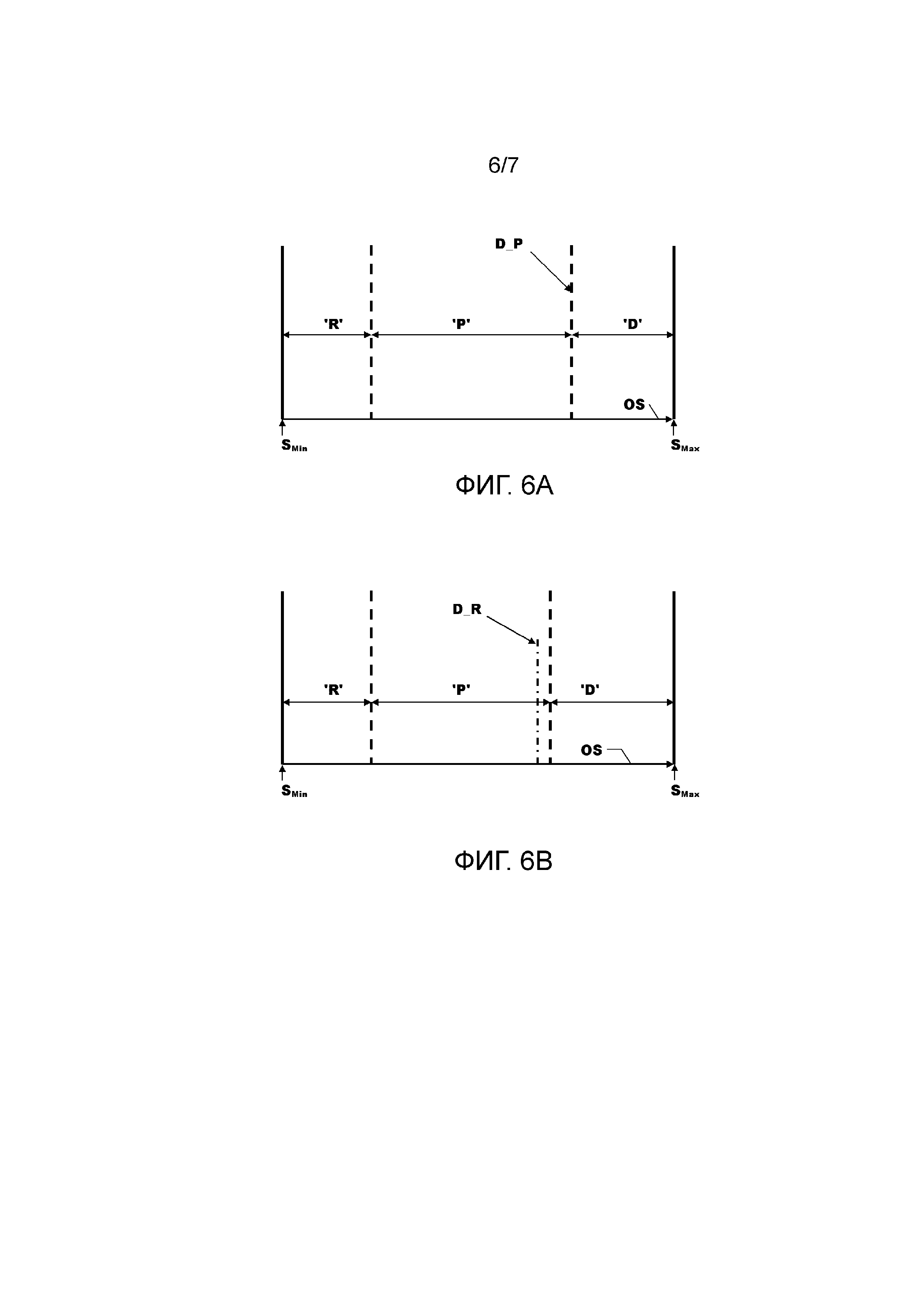
фиг.6a - схема, показывающая три зоны зацепления по фиг.5 относительно величины выходного сигнала с датчика смещения поршня рабочего цилиндра, когда педаль сцепления смещена, и показывающая первое пороговое значение для использования, когда сцепление расцепляется;
фиг.6b - схема, показывающая три зоны зацепления по фиг.5 относительно величины выходного сигнала с датчика смещения поршня рабочего цилиндра, когда педаль сцепления смещена, и показывающая второе пороговое значение для использования, когда сцепление зацепляется;
фиг.7a - графическое представление, показывающее зависимость между выходным сигналом с датчика 63 положения поршня рабочего цилиндра и моментом времени для перезапуска двигателя; и
фиг.7b - графическое представление, показывающее зависимость между выходным сигналом датчика тормозной педали и моментом времени для перезапуска двигателя, показанного на фиг.7a.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
С конкретной ссылкой на фиг.1 и 2, показано моторное транспортное средство 5, имеющее двигатель 10, приводящий в действие многоскоростную механическую трансмиссию 11. Трансмиссия 11 присоединена с возможностью приведения в действие к двигателю 10 системой 10 сцепления, которая вручную включается или выключается водителем моторного транспортного средства 5 с использованием педали 25 сцепления.
Трансмиссия 11 имеет избиратель механизма переключения передач (не показан), который подвижен между несколькими положениями, в том числе, по меньшей мере одним положением, где выбрана передача, образующая часть многоскоростной трансмиссии, и нейтральным положением, в котором не выбрана ни одна передача многоскоростной трансмиссии. Когда избиратель механизма переключения передач перемещен в нейтральное положение, многоскоростная трансмиссия 11 упоминается находящейся в нейтральном состоянии, в котором привод не может передаваться многоскоростной трансмиссией, а когда избиратель механизма переключения передач перемещен в положение на передаче, многоскоростная трансмиссия 11 упоминается находящейся в состоянии «на передаче», в котором привод может передаваться многоскоростной трансмиссией.
Стартер двигателя, в этом случае, в виде интегрированного стартера-генератора 13 (ISG) присоединен с возможностью приведения в действие к двигателю 10 и, в этом случае, присоединен гибким приводом в виде приводного ремня или цепного привода 14 к коленчатому валу двигателя 10. ISG 13 присоединен к источнику электрической энергии в форме аккумуляторной батареи 15 и используется в качестве электродвигателя для пуска двигателя 10. Аккумуляторная батарея 15 перезаряжается посредством ISG 13, когда ISG 13 работает в качестве электрического генератора. Следует принимать во внимание, что ISG 13 мог бы быть заменен стартерным электродвигателем для запуска двигателя 10.
Приводимое в действие двухпозиционное устройство в форме человеко-машинного интерфейса (HMI), в этом случае, воплощенного в форме приводимого в действие ключом замка 17 зажигания, используется для управления общей работой двигателя 10. То есть, когда двигатель 10 работает, замок 17 зажигания находится во «включенном» положении (включенного ключа зажигания), а когда замок 17 зажигания находится в «выключенном» положении (выключенного ключа зажигания), двигатель 10 не способен работать. Замок 17 зажигания также включает в себя третье кратковременное положение, используемое для ручного запуска двигателя 10. Следует принимать во внимание, что другие устройства HMI могут использоваться для обеспечения этих функциональных возможностей, и что изобретение не ограничено использованием приводимого в действие ключом замка зажигания.
Электронный контроллер 16 присоединен к стартеру-генератору 13, к двигателю 10, к датчику 12 избирателя механизма переключения передач, используемому для контроля, находится ли трансмиссия 11 в нейтрали или на передаче, к датчику 21 ходовой скорости, используемому для измерения скорости вращения ходового колеса 20, к датчику 24 положения тормозной педали, используемому для контроля положения тормозной педали 23, к системе считывания положения педали сцепления, используемой для контроля положения педали 25 сцепления, и к датчику 19 положения дроссельной заслонки, используемому для контроля положения педали 18 акселератора.
Положение поршней 52 и 62 главного и рабочего цилиндров может измеряться датчиками 53, 63 с использованием любого из некоторого количества технологий считывания положения, например, таких как и без ограничения, PLCD эффект Холла.
Педаль 18 акселератора выдает водительский ввод требуемой мощности на выходе из двигателя 10. Если педаль 18 акселератора была перемещена из исходного положения, она упоминается находящейся в «нажатом положении» или в «нажатом состоянии».
Следует принимать во внимание, что термин датчик избирателя механизма переключения передач не ограничен датчиком, который контролирует положение избирателя механизма переключения передач, но скорее является любым устройством, которое может выдавать обратную связь о том, находится ли трансмиссия 11 на передаче или в нейтрали.
Подобным образом, термин датчик тормозной педали не ограничен датчиком, который контролирует положение тормозной педали, но скорее является любым устройством, которое выдает обратную связь о том, приложил ли водитель моторного транспортного средства 5 давление к тормозной педали 23 для применения тормозов транспортного средства 5. Например, датчик тормозной педали мог бы контролировать давление текучей среды в одной или более тормозных магистралей. Когда тормозная педаль 23 была нажата в достаточной мере, чтобы применить тормоза, она упоминается находящейся в нажатом состоянии или нажатом положении.
Далее, в частности, со ссылкой на фиг.2, может быть видно, что система 50 сцепления содержит сцепление 2 и систему гидравлического привода, присоединяющую сцепление 2 к педали 25 сцепления. Система гидравлического привода содержит механическую рычажную передачу 54, присоединяющую педаль 25 сцепления к поршню 52 главного цилиндра 51, гидравлическое соединение или трубопровод 55, присоединяющие выход из главного цилиндра 51 к одному концу рабочего цилиндра 61, в котором с возможностью скольжения установлен поршень 62 рабочего цилиндра, и механическую рычажную передачу 65 от поршня 62 рабочего цилиндра до выжимного подшипника 6, используемую для избирательного выключения и включения сцепления 2.
Следует принимать во внимание, что смещение педали 25 сцепления в направлении стрелки «ход педали сцепления» на фиг.2 будет создавать соответствующие смещения Dmaster и Dslaveглавного и рабочего поршней 52 и 62, соответственно, в направлении расцепления сцепления.
Сцепление 2, в этом случае, поэтому, является типом нажимного действия фрикционного сцепления. Однако, следует принимать во внимание, что изобретение также могло бы быть применено к сцеплению типа натяжного действия.
Сцепление 2 включает в себя узел 3 корзины, нажимной диск 4 и ведомый диск 7, вставленный между нажимным диском 4 и маховиком 8, прикрепленным к коленчатому валу (не показан) двигателя 10. Сцепление 2 является традиционным по конструкции и подробно не описано, всего лишь необходимо знать, что перемещение выжимного подшипника 6 в направлении стрелки Dclutch посредством поршнем 62 рабочего цилиндра является перемещением в направлении расцепления сцепления, и что перемещение выжимного подшипника 6 в противоположном направлении является движением в направлении зацепления сцепления.
В некоторой точке во время диапазона движения выжимного подшипника 6, состояние сцепления 2 будет переключаться с расцепленного состояния, в котором крутящий момент по существу не может передаваться сцеплением с двигателя 10 на трансмиссию 11, в частично зацепленное состояние, где может передаваться небольшая величина крутящего момента. Это положение зацепления сцепления часто указывается ссылкой как «точка прихвата». Значение крутящего момента, передаваемого в точке прихвата, будет меняться от транспортного средства к транспортному средству в зависимости от многих факторов, в том числе, механического передаточного числа между двигателем 10 и ведущими колесами (не показаны), трения между дисками сцепления и в приводе на ведущие колеса, трения между ходовыми колесами и дорогой. Однако, величина крутящего момента, который может передаваться в точке прихвата, может быть достаточной, чтобы водитель ощущал небольшое дерганье, но не достаточна, чтобы вызвать движение моторного транспортного средства. Величина передаваемого крутящего момента в точке прихвата типично находится в диапазоне от 3 до 10 Нм.
Электронный контроллер 16 принимает несколько сигналов из двигателя 10, в том числе, сигнал, указывающий скорость вращения двигателя 10, с датчика скорости вращения (не показан) и отправляет сигналы в двигатель, используемые для управления глушением и запуском двигателя 10. В этом случае, двигатель 10 является двигателем 10 с искровым зажиганием, и сигналы, отправляемые из электронного блока 16 управления, используются для управления системой подачи топлива (не показана) для двигателя 10 и системой зажигания (не показана) для двигателя 10. Если бы двигатель 10 должен был быть дизельным двигателем, то управлялась бы только подача топлива в двигатель. Электронный контроллер 16 может содержать различные компоненты, в том числе, центральное процессорное устройство, устройства памяти, таймеры и устройства обработки сигналов для преобразования сигналов с датчиков, присоединенных к электронному контроллеру 16, в данные, которые используются электронным контроллером 16 для управления работой и, в частности, автоматическим остановом и пуском двигателя 10. Также следует принимать во внимание, что электронный контроллер 16 может быть сформирован из нескольких дискретных электронных блоков управления, которые поддерживают связь друг с другом, чтобы добиваться требуемых функциональных возможностей.
Во время нормальной работы двигателя, электронный контроллер 16 двигателя выполнен с возможностью управления топливом, подаваемым в двигатель 10, и для регулировки системы зажигания, так чтобы искры подавались в двигатель 10 со свечей зажигания с правильными временными характеристиками для создания требуемого крутящего момента двигателя.
Электронный контроллер 16 управляет работой двигателя 10, который работоспособен в двух режимах, первом или режиме работы с пуском-остановом, и втором или ручном режиме работы.
Основным фактором, используемым для определения, эксплуатируется ли двигатель 10 во втором режиме или в первом режиме, в случае этого примера, является то, движется ли моторное транспортное средство 5. Если моторное транспортное средство 5 движется, двигатель эксплуатируется во втором режиме, и двигатель 10 будет эксплуатироваться непрерывно, если не выключен вручную водителем, а если моторное транспортное средство 5 не движется, двигатель 10 будет эксплуатироваться в первом режиме, в котором операция автоматического пуска-останова двигателя будет происходить при условии, что другие факторы, как описанные ниже, указывают, что операция пуска-останова возможна. Следует принимать во внимание, что изобретение могло бы быть применено к моторному транспортному средству, где двигатель глушится с трансмиссией, остающейся на передаче, в то время как моторное транспортное средство все еще движется, иногда указываемому ссылкой как транспортное средство с автоматическим пуском-остановом на ходу.
В дополнение к требованию, чтобы транспортное средство 5 было неподвижным, могут быть другие факторы, используемые для принятия решения, возможна ли работа в первом режиме. Например, может быть необходимо, чтобы состояние заряда аккумуляторной батареи 15 было выше заданного уровня, может быть необходимо, чтобы температура двигателя 10 была выше заданного уровня, может быть необходимо, чтобы температура окружающей среды была выше заданного значения, или может быть необходимо, чтобы система доочистки соответствовала температуре (розжига).
В первом или режиме работы с пуском-остановом, двигатель 10 избирательно останавливается и запускается электронным контроллером 16 без вмешательства водителя, когда существуют одно или более определенных условий останова и пуска двигателя, известных как «события инициации». Эти события инициации останова и пуска основаны на сигналах, принимаемых электронным контроллером 16 с датчика 19 дросселя, датчика 24 тормозов, из системы 50 сцепления и датчика 12 избирателя механизма переключения передач. Положение или состояние сцепления 2, педали 18 акселератора, тормозной педали 23 и трансмиссии 11 все являются разными переменными моторного транспортного средства, которые используются для управления работой двигателя 10. Следует принимать во внимание, что многие другие переменные также могут использоваться, в том числе, но не в качестве ограничения, состояние стояночного тормоза, и был ли переключатель ручного запрета пуска-останова введен в действие водителем.
Когда двигатель 10 является работающим во втором режиме, он эксплуатируется непрерывно, пока замок 17 зажигания остается во «включенном» положении, и двигатель 10 останавливается и запускается ручным приведением в действие замка 17 зажигания водителем.
Хотя измерение скорости моторного транспортного средства описано выше со ссылкой на использование датчика 21 ходового колеса, так как такие датчики часто уже присутствуют на моторном транспортном средстве как часть тормозной антиблокировочной системы, следует принимать во внимание, что другие пригодные средства могут использоваться для определения скорости моторного транспортного средства 5, например, такие как датчик, измеряющий скорость вращения выходного вала из трансмиссии 11.
Моторное транспортное средство 5 будет работать следующим образом.
Если условия для операции пуска-останова не удовлетворены, то двигатель эксплуатируется непрерывно, в то время как HMI 17 остается в состоянии «включенного ключа зажигания», и будет остановлен, когда состояние HMI 17 переключается в состояние выключенного ключа зажигания.
Когда операция пуска-останова возможна, то есть, скорость транспортного средства, в качестве считываемой датчиком 21 скорости транспортного средства, по существу равна нулю, или были удовлетворены какие-нибудь другие условия, электронный контроллер 16 управляет остановом и пуском двигателя 10, как изложено ниже.
С работающим двигателем 10 и трансмиссией 11 на передаче, проверяется, является ли текущее состояние зацепления сцепления 2 таким, что останавливать двигатель 10 безопасно.
Это делается посредством сравнения выходного сигнала (OS) с датчика 63 положения поршня рабочего цилиндра с заданным и установленным первым пороговым значением D_P.
Первое пороговое значение D_P является весьма консервативным пороговым значением, то есть, может быть гарантировано, с учетом факторов допуска и шума, что сцепление 2 будет расцеплено, если OS≥D_P.
Следует принимать во внимание, что датчик 63 положения поршня рабочего цилиндра мог бы включать в себя внутреннюю обработку сигналов, и что выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра мог бы быть аналоговым сигналом или цифровым сигналом. Также следует принимать во внимание, что выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра мог бы падать по мере того, как педаль 25 сцепления нажимается, в каком случае, проверка, приведенная выше, была бы заменена на OS ≤ D_P?
В любом случае, когда было подтверждено, что сцепление 2 расцеплено, электронный контроллер 16 проверяет, присутствует ли по меньшей мере одно событие инициации останова двигателя. Например, если выходной сигнал с датчика 24 тормозной педали указывает, что тормозная педаль нажимается, то это составляло бы событие инициации останова двигателя, и останов двигателя 10 желателен, чтобы экономить топливо и снижать выбросы из двигателя 10.
Поэтому, если присутствует событие инициации останова двигателя, двигатель 10 останавливается, а иначе, двигатель 10 оставляется в работающем состоянии.
Двигатель 10 запускается из остановленного состояния, если по меньшей мере одно событие инициации пуска двигателя найдено присутствующим, когда проверяется электронным контроллером 16 и, во-вторых, состояние зацепления сцепления 2 является таким, что двигатель 10 может быть безопасно запущен. Касательно этого второго требования, выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра проверяется на соответствие второму заданному пороговому значению D_R. Второе пороговое значение D_R устанавливается, чтобы приблизительно соответствовать точке прихвата сцепления 2, а потому, является относительно агрессивным пороговым значением.
Если OS ≥ D_R, то перезапуск двигателя 10 разрешен, и ISG 13 используется для проворачивания коленчатого вала двигателя 10. Если выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра падает по мере того, как нажимается педаль 25 сцепления, то вышеприведенная проверка была бы заменена на: OS ≤ D_R.
В любом случае, когда было подтверждено, что сцепление 2 не зацеплено в достаточной степени, чтобы вызывать проблему, если бы должен был запускаться двигатель 10, электронный контроллер 16 использует ISG 13 для проворачивания коленчатого вала двигателя 10.
Поэтому, подводя итог вышесказанному, два разных пороговых предела установлены для использования при определении, когда запускать и останавливать двигатель 10. Первое пороговое значение D_P является действующим, когда сцепление 2 расцепляется, а второй пороговый предел D_R используется, когда сцепление 2 зацепляется.
Так как первое пороговое значение D_P является более консервативным, чем второе пороговое значение D_R, водитель может слегка отпускать педаль 25 сцепления, в то время как двигатель 10 останавливается, не оказывая влияния на способность электронного контроллера 16 перезапускать двигатель 10, если возникает событие инициации пуска двигателя. Дополнительно, разность между первым и вторым пороговыми значениями D_P и D_R снабжает водителя большим запасом на ошибку в показателях синхронизации отпускания педали 25 сцепления с инициированием перезапуска.
Фиг.7a и 7b показывают соответственно отпускание педали 25 сцепления и отпускание тормозной педали 23 во время попытки водителя тронуться с места после останова двигателя.
Событие инициации пуска двигателя выдается в случае этого примера, когда выходной сигнал с датчика 24 тормозной педали падает до нуля в момент «T» времени. Следует принимать во внимание, что другие события инициации пуска могли бы использоваться, и что изобретение не ограничено использованием события инициации типа датчик тормозной педали равен нулю. Например, и без ограничения, оно было бы событием инициации типа датчик тормозной педали равен нулю. Например, и без ограничения, было бы возможным использовать стратегию для раннего выявления намерения отпускания тормозной педали до того, как она была полностью отпущена, посредством считывания быстрого перемещения в направлении отпускания из удерживаемого на тормозах положения.
Как показано на фиг.7a, вследствие водителя, начинающего отпускать педаль 25 сцепления, выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра уже упал ниже уровня D_P в момент «T» времени, и значит, если бы было должно предусматриваться только одно пороговое значение, двигатель 10 не перезапускался бы, так как предполагалось бы, что сцепление 2 излишне зацеплено, чтобы был разрешен перезапуск двигателя. Однако, так как значение выходного сигнала (OS) в момент «T» времени больше, чем второе пороговое значение D_R, пуск двигатель разрешен.
Поэтому, если одно и то же консервативное пороговое значение D_P (пороговое значение, которое аналогично пороговому значению, которое устанавливалось бы, если бы было только одно пороговое значение) было бы должно использоваться как для зацепления, так и расцепления сцепления 2, то, в случае этого примера, запуск двигателя 10 был бы запрещен, так как выходной сигнал (OS), в момент T времени, меньше, чем первое пороговое значение D_P, тогда как, поскольку более агрессивное второе пороговое значение D_R используется, когда сцепление 2 зацепляется (педаль сцепления отпускается), выходной сигнал (OS) больше, чем второе пороговое значение D_R в момент T времени, и значит, пуск двигателя 10 разрешен.
Поэтому, посредством использования сдвоенных пороговых значений D_P и D_R в соответствии с этим изобретением, благоприятная возможность для пуска двигателя не была упущена.
Далее, со ссылкой на фиг.3, показана высокоуровневая блок-схема последовательности операций способа методологии, используемой для определения, следует ли эксплуатировать моторное транспортное средство в первом режиме или втором режиме работы.
Способ начинается на этапе 110 блок-схемы с ключом 17 зажигания в «выключенном» положении (выключенного ключа зажигания) и будет оставаться в этом состоянии до тех пор, пока, на этапе 115 блок-схемы, ключ 17 зажигания не перемещен во «включенное» положение (включенного ключа зажигания), которое будет запускать двигатель 10, как указано на этапе 120 блок-схемы.
Затем, на этапе 130 блок-схемы, определяется, удовлетворены ли условия для пуска-останова. То есть, на этапе 130 блок-схемы, принимается решение, следует ли использовать первый или второй режим работы. Одним из этих условий, используемых для этого решения, в случае этого примера, является, движется ли транспортное средство 5 выше заданной скорости, и настолько, насколько касается этого изобретения, если транспортное средство движется выше заданной скорости, предполагается, что будет использоваться ручной или второй режим работы. Это происходит потому, что этот пример предназначен для использования при управлении операцией пуска-останова двигателя 10, когда транспортное средство 5 является неподвижным. Однако, следует принимать во внимание, что, как указанно ранее, изобретение могло бы быть применено к моторному транспортному средству, где двигатель глушится с трансмиссией, остающейся на передаче, в то время как моторное транспортное средство все еще движется (транспортному средству с автоматическим пуском-остановом на ходу).
Другими условиями, которые могли бы использоваться для принятия этого решения о первом или втором режиме, являются, имеет ли температура окружающей среды значение, большее, чем заданная температура, был ли достигнут заданный уровень комфорта в пассажирской кабине, являются ли текущие электрические потребности вспомогательных агрегатов меньшими, чем заданные уровни, или были ли завершены проверки правдоподобия датчиков.
При условии, что все из условий, которые необходимо удовлетворить, присутствуют, когда проверяются на этапе 130 блок-схемы, способ будет продвигаться с этапа 130 блок-схемы на этап 135 блок-схемы, где выбирается первый режим работы, а затем, на этап 205 блок-схемы. Однако, если все из условий, которые необходимо удовлетворить, не присутствуют, когда проверяются на этапе 130 блок-схемы, способ будет продвигаться на этап 134 блок-схемы, где выбирается второй или нормальный режим работы. После этапа 134 блок-схемы, способ переходит на этап 140 блок-схемы, чтобы определять, находится ли еще ключ 17 зажигания во включенном положении. Если ключ 17 зажигания еще находится во включенном положении (включенного ключа зажигания), то способ возвращается на этап 130 блок-схемы с работающим двигателем, но, если ключ 17 зажигания определен находящимся в выключенном положении (выключенного ключа зажигания), способ заканчивается на этапе 199.
Следует принимать во внимание, что всякий раз, когда происходит событие выключения ключа зажигания, способ будет заканчиваться.
Далее, со ссылкой на фиг.4-6b, с этапа 135 блок-схемы способ переходит на этап 205 блок-схемы, где устанавливаются пороговые значения состояния зацепления сцепления. Установленные пороговые значения состояния зацепления сцепления основаны на выходном сигнале с датчика 63 положения поршня рабочего цилиндра, который измеряет положение поршня 62 рабочего цилиндра.
Датчик 63 положения поршня рабочего цилиндра калиброван, чтобы, когда педаль 25 сцепления не затрагивается, выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра был равен SMin, а когда педаль 25 сцепления полностью нажата, сигнал с датчика 63 положения поршня рабочего цилиндра был равен SMax. Три зоны состояния зацепления сцепления, известные как Отпущенная (R), Нажатая (P) и Выжатая (D), показаны на фиг.5 так, как они относятся к положению педали 25 сцепления, и соответствующие зоны поршня рабочего цилиндра определены на основании зависимости между положением педали сцепления и смещением поршня рабочего цилиндра (DSlave). Соответствующие значения выходного сигнала (OS) с датчика 63 положения поршня рабочего цилиндра для зон «R», «P» и «D» показаны на фиг.6a и 6b.
Когда педаль 25 сцепления находится в отпущенной зоне (R), сцепление 2 полностью зацеплено.
Когда педаль 25 сцепления находится в нажатой зоне (P), педаль 25 сцепления была смещена из своего нерабочего положения, любой люфт или свободный ход в системе привода сцепления был выбран, и начинается расцепление или зацепление сцепления 2. Точка прихвата сцепления 2 расположена в нажатой зоне «P» и, в случае этого примера, находится близко к границе раздела между нажатой зоной «P» и выжатой зоной «D».
Когда педаль 25 сцепления находится в выжатой зоне (D), педаль 25 сцепления была значительно смещена из своего нерабочего положения и приближается к полностью смещенному положению. Поэтому, в выжатой зоне, сцепление 2 расцеплено и не способно передавать крутящий момент.
В случае этого изобретения, два пороговых значения D_P и D_R управления используются в зависимости от того, происходит ли движение педали 25 сцепления в направлении полностью выжатого положения или в направлении полностью отпущенного положения. То есть, есть первое пороговое значение D_P, когда сцепление 2 расцепляется (педаль 25 сцепления нажимается), и второе пороговое значение D_R, когда сцепление 2 зацепляется (педаль 25 сцепления отпускается).
Когда педаль 25 сцепления движется в направлении полностью нажатого положения, побуждая сцепление 2 расцепляться, используется весьма консервативное пороговое значение, пороговое значение D_P. Эквивалентное смещение поршня рабочего цилиндра (DSlave) от полностью отпущенного положения в показателях выходного сигнала (OS) с датчика 63 положения поршня рабочего цилиндра, определенное в качестве первого порогового значения D_P, показано на фиг.6a. Когда выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра равен, но предпочтительно больше, чем это первое пороговое значение (D_P), гарантировано, что сцепление 2 расцеплено, и что крутящий момент не может передаваться сцеплением 2. Первое пороговое значение D_P, поэтому, определяет протяженность выжатой зоны «D».
Когда педаль 25 сцепления движется в направлении полностью отпущенного положения, чтобы зацеплять сцепление 2, то есть, из полностью выжатого положения, используется менее консервативное пороговое значение, второе пороговое значение D_R, которое, в случае этого примера приблизительно соответствует точке прихвата сцепления 2. D_R является последней гарантированной точкой, в которой не возможно передавать достаточный крутящий момент через сцепление, чтобы вызывать небезопасное перемещение транспортного средства для наложения допусков наихудшего случая.
Эквивалентное смещение поршня рабочего цилиндра (DSlave) от полностью отпущенного положения в показателях выходного сигнала (OS) с датчика 63 положения поршня рабочего цилиндра, определенное в качестве порогового значения D_R, показано на фиг.6b. Следует принимать во внимание, что точное расположение этого порогового значения D_R будет зависеть от того, насколько близко лежит точка прихвата к стыку нажатой и выжатых зон «P» и «D».
Когда выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра равен, но предпочтительно больше, чем это второе пороговое значение D_R, сцепление 2 предполагается расцепленным в достаточной мере, чтобы значимый крутящий момент не мог передаваться сцеплением 2. На или близко к пороговому значению D_R, состояние сцепления 2 меняется с расцепленного на частично зацепленное состояние вследствие близости порогового значения D_R к точке прихвата сцепления 2. Поэтому, возможно, что некоторый крутящий момент может передаваться сцеплением 2, когда определяемое смещение поршня 62 рабочего цилиндра приближается к второму пороговому значению D_R, это будет зависеть от допусков в системе сцепления конкретного транспортного средства, таких как производственный допуск, а также состояния износа системы сцепления и рабочих температур различных компонентов системы сцепления. Калибровка второго порогового значения D_R такова, что величины любого крутящего момента, передаваемого, когда OS = D_R, не достаточно, чтобы создавать нежелательное перемещение моторного транспортного средства 5.
Следует принимать во внимание, что есть калиброванная зависимость между действующим смещением DSlave поршня 62 рабочего цилиндра и эквивалентным выходным сигналом (OS) датчика с датчика 63 положения поршня рабочего цилиндра. Калибровка датчика 63 положения поршня рабочего цилиндра, поэтому, должна учитывать эту зависимость наряду со всеми из различных допусков и шумовых факторов для сцепления 2 и системы привода для сцепления 2.
Также следует принимать во внимание, что специфичные значения, выбранные для первого и второго пороговых значений D_P и D_R, могут не быть постоянными значениями, но могли бы меняться, чтобы учитывать или компенсировать износ сцепления 2, такой как износ ведомого диска 7, а также изменения в самом механизме отпускания сцепления. Поэтому, когда выбран первый режим или пуска-останова, первое и второе пороговые значения D_P и D_R устанавливаются на этапе 205 блок-схемы, чтобы предоставить возможность для регулировки этих значений со временем, если применяется такая технология компенсации.
Положения CP_P и CP_R педали сцепления, эквивалентные первому и второму пороговым значениям D_P и D_R, показаны на фиг.5 в качестве пунктирных линий.
Возвращаясь к этапу 205 блок-схемы, способ переходит на этап 210 блок-схемы, где двигатель 10 работает, а трансмиссия 11 находится на передаче. Следует принимать во внимание, что порядок этапов 205 и 210 блок-схемы мог бы быть изменен на обратный.
С этапа 210 блок-схемы, способ переходит на этап 215 блок-схемы, где текущий выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра сравнивается с первым пороговым значением D_P выключения сцепления. Следует принимать во внимание, что, во время нормальной работы моторного транспортного средства 5, сцепление 2 будет полностью зацеплено наряду с тем, что трансмиссия 11 находится на передаче, и значит, единственный вариант состоит в том, чтобы водитель выключил сцепление 2. Поэтому, уместное пороговое значение всегда будет первым пороговым значением D_P, когда транспортное средство должно быть приведено к остановке. Однако, мог бы быть дополнительный этап для определения, какое пороговое значение следует использовать, и это было бы в особенности применимо в случае транспортного средства с пуском-остановом на ходу. Например, если сигнал с датчика 63 положения поршня рабочего цилиндра возрастает, то может быть сделан вывод, что сцепление 2 расцепляется, и наоборот, если сигнал с датчика 63 положения поршня рабочего цилиндра убывает, то сцепление 2 зацепляется. Также следует принимать во внимание, что противоположное изменение выходного сигнала (OS) могло бы использоваться, если величина сигнала с датчика 63 положения поршня рабочего цилиндра уменьшается по мере того, как расцепляется сцепление 2.
Возвращаясь к этапу 215 блок-схемы, если значение выходного сигнала (OS) с датчика 63 положения поршня рабочего цилиндра меньше, чем D_P, то сцепление 2 предполагается зацепленным, и значит, способ возвращается на этап 210 блок-схемы. То есть, на данный момент нет благоприятной возможности останавливать или глушить двигатель 10. Однако, если выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра равен или предпочтительно равен, или больше, чем D_P, то сцепление 2 предполагается расцепленным, и значит, есть благоприятная возможность останавливать или глушить двигатель 10, и способ будет продвигаться с этапа 215 блок-схемы на этап 220 блок-схемы.
На этапе 220 блок-схемы проверяется, присутствует ли по меньшей мере одно событие инициации останова двигателя. Примерами событий инициации останова или глушения двигателя являются то, что нажимается тормозная педаль 23, что не нажимается педаль 18 акселератора, или что был применен стояночный тормоз. Если по меньшей мере одно из этих событий инициации присутствует, то способ переходит с этапа 220 блок-схемы на этап 225 блок-схемы, где двигатель 10 глушится, так что, как указано этапом 230 блок-схемы, он останавливается. Иначе, способ возвращается с этапа 220 блок-схемы на этап 210 блок-схемы с все еще работающим двигателем.
Следует принимать во внимание, что этапы 215 и 220 блок-схемы могли бы быть объединены, требуя, чтобы оба требования, заданные на этапах 215 и 220 блок-схемы, присутствовали, чтобы способ продвигался на этап 225 блок-схемы. Если то или другое требование не присутствует, то способ возвращался бы на этап 210 блок-схемы.
Возвращаясь на этап 230 блок-схемы, способ переходит с этапа 230 блок-схемы с остановленным двигателем на этап 240 блок-схемы, чтобы проверить, присутствует ли по меньшей мере одно событие инициации пуска.
Примерами этих событий инициации пуска являются то, что тормозная педаль 23 не нажимается, отпускается, отпускается быстрее, чем заданный темп, или была отпущена, что нажимается педаль 18 акселератора, или что был отпущен стояночный тормоз. Если присутствует по меньшей мере одно из этих событий инициации пуска, способ переходит с этапа 240 блок-схемы на этап 250 блок-схемы, иначе, способ возвращается с этапа 240 блок-схемы на этап 230 блок-схемы все еще остановленным двигателем 10.
Если присутствует по меньшей мере одно из событий инициации перезапуска, когда проверяется на этапе 240 блок-схемы, способ переходит с этапа 240 блок-схемы на этап 250 блок-схемы, где текущий выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра сравнивается с вторым пороговым значением D_R выключения сцепления. Следует принимать во внимание, что для достижения этапы 250 блок-схемы, сцепление 2 будет расцепленным, а для трогания с места из состояния покоя или для перезапуска двигателя, в то время как он все еще крутится, водитель должен включить сцепление 2. Поэтому, уместным пороговым значением будет второе пороговое значение D_R. Однако, как указанно ранее, может быть дополнительный этап для определения, какое пороговое значение следует использовать.
Если текущий выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра, когда сравнивается на этапе 250 блок-схемы, больше, чем или равным второму пороговому значению D_R, то способ переходит на этап 260 блок-схемы, где двигатель перезапускается, а затем, возвращается на этап 210 блок-схемы с работающим двигателем 10 и трансмиссией 11 на передаче. Однако, если, когда сравнивается на этапе 250 блок-схемы, текущий выходной сигнал (OS) с датчика 63 положения поршня рабочего цилиндра меньше, чем второе пороговое значение D_R, способ возвращается на этап 230 блок-схемы с еще остановленным двигателем 10. Это происходит потому, что сцепление 2 могло бы быть зацеплено в достаточной мере, чтобы вызывать проблему, если бы двигатель 10 должен был перезапускаться.
Следует принимать во внимание, что, если событие выключения ключа зажигания происходит в любое время в течение выполнения способа, то способ будет завершаться.
Следует принимать во внимание, что способ, показанный на фиг.3 и 4, мог бы быть закодирован в качестве выполняемых этапов в электронном контроллере 16.
Поэтому, подводя итог вышесказанному, первый консервативный пороговый предел выключения сцепления используется, когда сцепление расцепляется, а второй мене консервативный пороговый предел выключения сцепления используется, когда сцепление зацепляется. Посредством использования двух разных пороговых значений в зависимости от того, зацепляется ли или расцепляется сцепление, изобретение обеспечивает безопасный останов и пуск двигателя, тем временем, сокращая количество неудавшихся перезапусков.
Хотя, в приведенном примере, первый и второй пороговые пределы выключения сцепления установлены в качестве значений выходного сигнала с датчика положения поршня рабочего цилиндра, связанного с рабочим цилиндром, таким как концентрический рабочий цилиндр, следует принимать во внимание, что два пороговых предела могли бы быть установлены и проверяться на соответствие иным образом.
Например, и без ограничения, перемещение выжимного подшипника могло бы считываться датчиком положения, а выходной сигнал с датчика выжимного подшипника использоваться для сравнения со значениями, приравнивающимися к первому и второму пороговым значениям, либо считывание поршня главного цилиндра, считывание положения педали сцепления или считывание давления в магистрали сцепления могли бы использоваться с соответствующими выходными сигналами, сравниваемыми со значениями сигналов, приравнивающимися к первому и второму пороговым значениям.
Специалистам в данной области техники следует понимать, что, хотя изобретение было описано в качестве примера со ссылкой на один или более вариантов осуществления, оно не ограничено описанными вариантами осуществления и что одна или более модификаций для описанных вариантов осуществления или альтернативных вариантов осуществления могли бы быть предложены, не выходя из объема изобретения, который изложен в прилагаемой формуле изобретения.
Реферат
Изобретение относится к моторным транспортным средствам и, в частности, к способу управления остановом и пуском двигателя моторного транспортного средства. Техническим результатом является повышение экономии топлива и снижение выбросов. Результат достигается тем, что предложен способ останова и пуска двигателя 10 моторного транспортного средства 5, имеющего систему 50 сцепления с ручным управлением, включающую в себя сцепление 2 для присоединения двигателя 10 с возможностью приведения в действие к трансмиссии 11. Первое и второе пороговые значения D_P, D_R выключения сцепления установлены для использования при управлении остановом и пуском двигателя 10. Первое пороговое значение D_P соответствует в большей степени расцепленному состоянию сцепления 2, чем второе пороговое значение D_R выключения сцепления. Первое пороговое значение D_P используется при выключенном сцеплении 2, чтобы решать, может ли двигатель 10 быть безопасно заглушен, в то время как трансмиссия 11 остается на передаче, и второе пороговое значение D_R используется при включенном сцеплении 2, чтобы решать, может ли двигатель 10 быть безопасно запущен, в то время как трансмиссия 11 остается на передаче. Посредством использования менее консервативного порогового значения D_R для пуска двигателя 10, чем для останова двигателя 10, количество запрещенных перезапусков уменьшается, тем самым повышая удовлетворенность водителя. 2 н. и 16 з.п. ф-лы, 9 ил.
Комментарии