Устройство и способ для управления транспортным средством - RU2418699C1
Код документа: RU2418699C1
Чертежи










Описание
Область техники
Настоящее изобретение относится к управлению транспортным средством, оборудованным двигателем внутреннего сгорания и вращающейся электрической машиной, и, в частности, к управлению транспортным средством, на котором водитель может использовать ручной режим переключения передач.
Уровень техники
В последние годы внимание уделялось транспортным средствам с гибридным приводом как дружественным по отношению к окружающей среде транспортным средствам. Транспортное средство с гибридным приводом оснащается электродвигателем в качестве источника энергии привода для транспортного средства, действующего в дополнение к традиционному двигателю внутреннего сгорания. В выложенной заявке на патент Японии JP 2006-62569 раскрыта технология, которая позволяет водителю выбирать ручной режим переключения для переключения передач в таком транспортном средстве с гибридным приводом.
Устройство переключения, раскрытое в JP 2006-62569, осуществляет управление транспортным средством с гибридным приводом, в котором двигатель, первый электродвигатель и второй электродвигатель, соединенные с ведущими колесами, соединяются вместе посредством планетарного зубчатого механизма. Это устройство переключения включает в себя рычаг переключения, который используется для выбора множества положений переключения. Этот рычаг переключения может по выбору вручную переключаться в стояночное положение, нейтральное положение, положение для движения вперед с автоматическим переключением (положение D) и положение для движения вперед с ручным переключением (положение М). В положении М положение переключения на повышающую передачу "+" и положение переключения на понижающую передачу "-" устанавливаются на одной линии относительно друг друга в продольном направлении транспортного средства. Когда водитель переводит рычаг переключения в положение переключения на повышающую передачу "+" или в положение переключения на понижающую передачу "-", выбирается диапазон "D" или диапазон "L". Таким образом, управление переключением выполняется так, чтобы передаточное число не могло превысить коэффициент для максимальной скорости диапазона переключений.
В транспортном средстве с гибридным приводом, раскрытом в JP 2006-62569, как описано выше, частоты вращения двигателя и первого электродвигателя регулируются, чтобы не превышать передаточного числа для максимальной скорости, во время работы в режиме ручного переключения. Однако, даже во время работы в режиме ручного переключения, двигатель может не достигать частоты вращения, соответствующей передаточному числу для максимальной скорости, но может регулироваться для достижения частоты вращения на холостом ходу, когда транспортное средство находится в состоянии самоподдерживающегося привода, т.е. когда первый электродвигатель управляется так, чтобы иметь на выходе практически нулевой крутящий момент, а двигатель управляется так, чтобы поддерживать состояние холостого хода. Следовательно, когда присутствует большая разность между частотой вращения, соответствующей передаточному числу для максимальной скорости, и частотой вращения на холостом ходу, частота вращения двигателя меняется быстро, что вызывает сотрясение в транспортном средстве всякий раз, когда состояние переключается между состоянием несамоподдерживающегося привода и состоянием самоподдерживающегося привода.
Раскрытие изобретения
Настоящее изобретение разработано для устранения упомянутой выше проблемы, и задача изобретения заключается в создании устройства управления транспортным средством, которое использует, в качестве источников энергии для движения, двигатель внутреннего сгорания и вращающуюся электрическую машину, соединенную с двигателем внутреннего сгорания, и предусматривает переключение в режиме ручного переключения, и, в частности, создании устройства управления, которое может гасить сотрясение, которое может происходить в режиме ручного переключения, а также способа управления и носителя записи с программой для реализации способа.
Устройство управления управляет транспортным средством, которое имеет двигатель внутреннего сгорания и вращающуюся электрическую машину, соединенную с двигателем внутреннего сгорания, в качестве источников энергии для движения, и выполняется с возможностью разрешения переключения передач в режиме переключения, выбранном водителем из автоматического режима переключения и ручного режима переключения. Устройство управления включает в себя блок распознавания, распознающий режим переключения, выбранный водителем из автоматического режима переключения и ручного режима переключения; и управляющее устройство, управляющее источниками энергии для движения так, чтобы изменять частоту вращения на холостом ходу двигателя внутреннего сгорания при выборе ручного режима переключения, по сравнению с частотой вращения на холостом ходу, достигаемой при выборе автоматического режима переключения.
Согласно настоящему изобретению водитель выбирает передаточное число во время движения в режиме ручного переключения. Следовательно, частота вращения двигателя внутреннего сгорания регулируется для достижения двигателем внутреннего сгорания и вращающейся электрической машиной частоты вращения в соответствии с передаточным числом, выбранным водителем. Однако, в зависимости от состояния транспортного средства или тому подобного (например, когда выходной крутящий момент вращающейся электрической машины регулируется так, чтобы быть практически нулевым, а двигатель внутреннего сгорания находится в состоянии самоподдерживающегося привода и, следовательно, управляется так, чтобы оставаться в состоянии холостого хода), такая ситуация может иметь место даже во время движения в режиме ручного переключения, в котором частота вращения не регулируется соответственно передаточному числу, выбранному водителем, а регулируется только двигателем внутреннего сгорания для достижения частоты вращения на холостом ходу. В режиме ручного переключения, следовательно, частота вращения двигателя внутреннего сгорания может переключаться от частоты вращения, соответствующей передаточному числу, выбранному водителем, до частоты вращения на холостом ходу, и частота вращения двигателя внутреннего сгорания может меняться, вызывая сотрясение в транспортном средстве. Соответственно, при выборе режима ручного переключения частота вращения на холостом ходу двигателя внутреннего сгорания изменяется исходя из частоты вращения, достигаемой при выборе автоматического режима переключения. Например, частота вращения двигателя внутреннего сгорания изменяется на частоту вращения в соответствии с передаточным числом, выбранным водителем. Следовательно, в режиме ручного переключения частота вращения двигателя внутреннего сгорания является стабильной, и зарождение сотрясения может быть погашено. Соответственно, в транспортном средстве, которое имеет двигатель внутреннего сгорания и вращающуюся электрическую машину, соединенную с двигателем внутреннего сгорания, в качестве источников энергии для движения и выполнено с возможностью разрешения переключения передач в режиме ручного переключения, устройство управления может погасить сотрясение транспортного средства, которое может иметь место в режиме ручного переключения.
Предпочтительно, если управляющее устройство управляет источниками энергии для движения так, чтобы увеличивать частоту вращения на холостом ходу при выборе режима ручного переключения, по сравнению с периодом времени, когда выбран автоматический режим переключения.
Согласно настоящему изобретению при выборе ручного режима переключения частота вращения на холостом ходу увеличивается. Таким образом, частота вращения на холостом ходу увеличивается, например, даже если частота вращения двигателя внутреннего сгорания регулируется для достижения высокого значения в режиме ручного переключения. Следовательно, частота вращения двигателя внутреннего сгорания может стабильно сохранять высокое значение, независимо от состояния транспортного средства.
Дополнительно предпочтительно, если устройство управления включает в себя датчик скорости транспортного средства, распознающий скорость транспортного средства; блок распознавания передачи, распознающий переключенную вручную передачу, выбранную водителем, когда выбран ручной режим переключения; и блок вычислений, вычисляющий наименьшую предельную частоту вращения двигателя внутреннего сгорания на основании скорости транспортного средства и переключенной вручную передачи. Управляющее устройство управляет источниками энергии для движения так, чтобы изменять частоту вращения на холостом ходу исходя из наименьшей предельной частоты вращения при выборе ручного режима переключения.
Согласно настоящему изобретению при выборе ручного режима переключения наименьшая предельная частота вращения двигателя внутреннего сгорания вычисляется на основании скорости транспортного средства и переключенной вручную передачи. Частота вращения на холостом ходу изменяется исходя из вычисленной наименьшей предельной частоты вращения. Следовательно, разность между наименьшей предельной частотой вращения и частотой вращения на холостом ходу может быть небольшой. Таким образом, частота вращения двигателя внутреннего сгорания может сохраняться стабильной, даже если частота вращения двигателя внутреннего сгорания переключается из состояния, в котором она регулируется для достижения наименьшей предельной частоты вращения, в состояние, в котором она регулируется для достижения частоты вращения на холостом ходу.
Дополнительно предпочтительно, если управляющее устройство управляет источниками энергии для движения так, чтобы изменять частоту вращения на холостом ходу до значения, соответствующего наименьшей предельной частоте вращения, при выборе ручного режима переключения.
Согласно настоящему изобретению при выборе ручного режима переключения частота вращения на холостом ходу изменяется до значения, соответствующего наименьшей предельной частоте вращения. Следовательно, частота вращения двигателя внутреннего сгорания может стабильно удерживаться вблизи наименьшей предельной частоты вращения.
Краткое описание чертежей
Фиг.1 - структура транспортного средства, оборудованного устройством управления согласно варианту осуществления настоящего изобретения.
Фиг.2 - механизм распределения мощности с фиг.1.
Фиг.3 - номограмма, иллюстрирующая зависимость по частоте вращения между двигателем, ЭГ(1) и ЭГ(2).
Фиг.4 - форма кулисы переключения согласно варианту осуществления настоящего изобретения.
Фиг.5 и 8 - зависимости между скоростью транспортного средства, передачей и наименьшей предельной частотой вращения двигателя.
Фиг.6 - функциональная структурная схема устройства управления согласно варианту осуществления настоящего изобретения.
Фиг.7 - блок-схема, иллюстрирующая управляющую структуру ЭБУ (электронный управляющий блок), который является устройством управления согласно варианту осуществления настоящего изобретения.
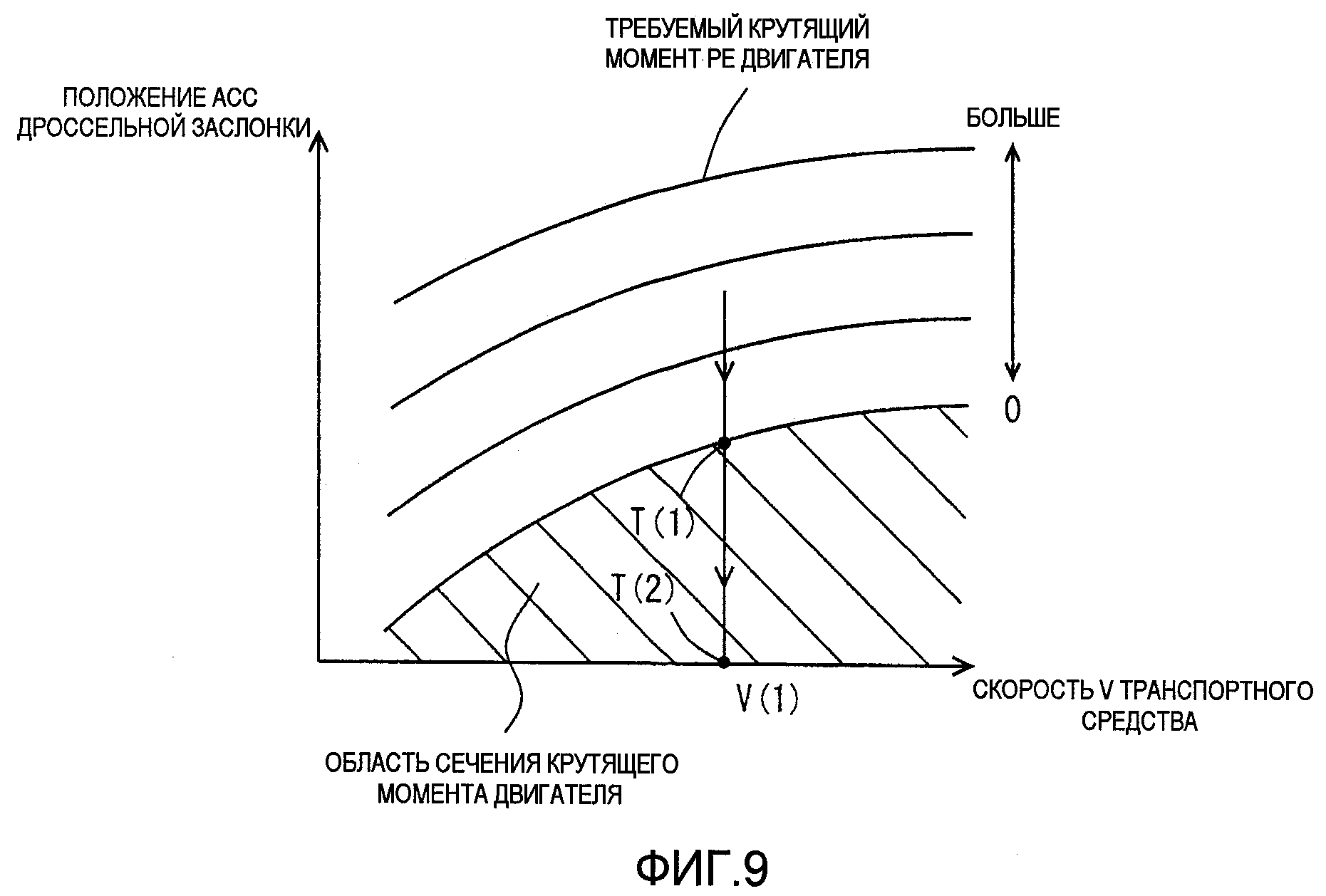
Фиг.9 и 10 - зависимости между скоростью транспортного средства, положением дроссельной заслонки и требуемым крутящим моментом двигателя.
Фиг.11 - временная диаграмма, иллюстрирующая работу транспортного средства, оборудованного устройством управления согласно варианту осуществления настоящего изобретения.
Осуществление изобретения
Далее будут описаны варианты осуществления настоящего изобретения со ссылкой на чертежи. В последующем описании одинаковые элементы обозначены одинаковыми ссылочными позициями, и их описание не повторяется.
Со ссылкой на фиг.1 описана структурная схема управления всего транспортного средства с гибридным приводом, оборудованного устройством управления согласно варианту осуществления. Транспортное средство, которое может использовать устройство управления согласно настоящему изобретению, не ограничивается транспортным средством с гибридным приводом, показанным на фиг.1, а может быть транспортным средством с гибридным приводом другого типа при условии, что оно допускает управление частотой вращения двигателя при посредстве электродвигателя.
Транспортное средство с гибридным приводом включает в себя двигатель 120, электродвигатель-генератор 140A (ЭГ(2) 140A) и электродвигатель-генератор 140B (ЭГ(1) 140B). Для наглядности ЭГ(2) 140A и ЭГ(1) 140B могут упоминаться как электродвигатели-генераторы 140, когда нет необходимости проводить различия между ними.
Электродвигатель-генератор 140 может выборочно выполнять функции генератора и электродвигателя в зависимости от состояния движения транспортного средства с гибридным приводом. Вращающийся вал электродвигателя-генератора 140 передает мощность привода через ведущие валы 170 на ведущие колеса 180. Транспортное средство двигается, используя мощность привода, предоставляемую электродвигателем-генератором 140. Когда электродвигатель-генератор 140 функционирует в качестве генератора, выполняется рекуперативное торможение. Когда электродвигатель-генератор 140 функционирует в качестве генератора, кинетическая энергия транспортного средства преобразуется в электрическую энергию и транспортное средство замедляется.
В дополнение к вышеупомянутым компонентам транспортное средство с гибридным приводом включает в себя понижающую зубчатую передачу 160 для передачи мощности привода, произведенной двигателем 120 и электродвигателем-генератором 140, на ведущие колеса 180 и для передачи энергии движения ведущих колес 180 на двигатель 120 и электродвигатели-генераторы 140, механизм 200 распределения мощности, который имеет входной вал 210, соединенный с коленчатым валом двигателя 120, и может распределять мощность привода, произведенную двигателем 120, по двум трактам, т.е. на ведущие колеса 180 и ЭГ(1) 140B, батарею 150, накапливающую электроэнергию для приводного электродвигателя-генератора 140, обратный преобразователь 154, который выполняет регулирование тока, выполняя преобразование между постоянным током для батареи 150 и переменным током для ЭГ(2) 140A и ЭГ(1) 140B, ЭБУ 500, управляющий всей гибридной системой для достижения наиболее эффективного движения транспортного средства с гибридным приводом, и другое.
Обратный преобразователь 154 использует электродвигатель-генератор 140 в качестве электродвигателя или генератора на основании управляющего сигнала, поступающего от электронного блока 500 управления (ЭБУ). Для обеспечения работы электродвигателя-генератора 140 в качестве электродвигателя обратный преобразователь 154 преобразует мощность постоянного тока, подаваемую от батареи 150, в мощность переменного тока и подает ее на электродвигатель-генератор 140. Управляя электроэнергией, подаваемой на электродвигатель-генератор 140, обратный преобразователь 154 управляет электродвигателем-генератором 140 так, чтобы добиться частоты вращения и направления вращения, предписываемых управляющим сигналом, поступающим от ЭБУ 500.
Дополнительно, между батареей 150 и обратным преобразователем 154 располагается промежуточный преобразователь 152. Так как номинальное напряжение батареи 150 ниже, чем номинальные напряжения ЭГ(2) 140A и ЭГ(1) 140B, промежуточный преобразователь 152 усиливает электроэнергию батареи 150, когда энергия батареи 150 должна подаваться на ЭГ(2) 140A и ЭГ(1) 140B. Когда батарея 150 должна заряжаться энергией, произведенной ЭГ(2) 140A и ЭГ(1) 140B, промежуточный преобразователь понижает электроэнергию.
ЭБУ 500 подсоединяется посредством электропроводки и тому подобного к счетно-решающим схемам 142A и 142B, датчику 504 положения переключения, датчику 508 положения дроссельной заслонки, датчику 510 частоты вращения двигателя и датчику 512 скорости транспортного средства.
Счетно-решающая схема 142A распознает частоту вращения и направление вращения ЭГ(2) 140A и передает сигнал, указывающий результат распознавания, на ЭБУ 500.
Счетно-решающая схема 142B распознает частоту вращения и направление вращения ЭГ(1) 140B и передает сигнал, указывающий результат распознавания, на ЭБУ 500.
Датчик 504 положения переключения распознает положение рычага 502 переключения, который перемещается по траектории переключения, формируемой в кулисе 100 переключения, и передает сигнал, указывающий результат распознавания, на ЭБУ 500.
Датчик 508 положения дроссельной заслонки распознает положение педали 506 управления дроссельной заслонкой (т.е. положение ACC дроссельной заслонки) и передает сигнал, указывающий результат распознавания, на ЭБУ 500.
Датчик 510 частоты вращения двигателя распознает частоту вращения (частоту NE вращения двигателя) коленчатого вала, который является выходным валом двигателя 120, и передает сигнал, указывающий результат распознавания, на ЭБУ 500.
Датчик 512 скорости транспортного средства распознает частоту вращения ведущего вала 170 как скорость V транспортного средства и передает сигнал, указывающий результат распознавания, на ЭБУ 500.
ЭБУ 500 управляет устройствами и тому подобным для получения желаемого состояния движения транспортного средства на основании сигналов, отправляемых от счетно-решающих схем 142A и 142B, датчика 504 положения переключения, датчика 508 положения дроссельной заслонки, датчика 510 частоты вращения двигателя и датчика 512 скорости транспортного средства, а также на основании карт отображения и программ, хранящихся в ПЗУ (постоянное запоминающее устройство).
Далее со ссылкой на фиг.2 будет дополнительно описан механизм 200 распределения мощности. Механизм 200 распределения мощности формируется из планетарной передачи, включающей в себя солнечную шестерню (S) 202, которая в дальнейшем именуется просто как "солнечная шестерня 202", ведущие шестерни 204, кронштейн (C) 206, который в дальнейшем именуется просто как "кронштейн 206", и коронную шестерню (R) 208, которая в дальнейшем именуется просто как "коронная шестерня 208".
Ведущие шестерни 204 входят в контакт с солнечной шестерней 202 и коронной шестерней 208. Кронштейн 206 несет на себе с возможностью вращения ведущие шестерни 204. Солнечная шестерня 202 соединяется с вращающимся валом ЭГ(1) 140B. Кронштейн 206 соединяется с коленчатым валом двигателя 120. Коронная шестерня 208 соединяется с выходным валом 220.
Поскольку двигатель 120, ЭГ(1) 140B и ЭГ(2) 140A связаны посредством механизма 200 распределения мощности, сформированного из планетарной передачи, частоты вращения двигателя 120, ЭГ(1) 140B и ЭГ(2) 140A демонстрируют зависимость, представляемую прямой линией на номограмме, например, как показано на фиг.3 (которая отображает пример зависимости в процессе постоянного движения). Используя эту зависимость, частота вращения ЭГ(1) 140B может корректироваться так, чтобы регулировать частоту NE вращения двигателя с учетом частоты вращения (т.е. скорости V транспортного средства) ЭГ(2) 140A.
Далее со ссылкой на фиг.4 будет описана кулиса 100 переключения. Как показано на фиг.4, траектория 102 переключения формируется в кулисе 100 переключения. Рычаг 502 переключения способен перемещаться по траектории 102 переключения. На траектории 102 переключения задается множество положений переключения. Например, множество положений переключения включает в себя положение, соответствующее ходу вперед (которое в дальнейшем именуется "положение (D)"), нейтральное положение (которое именуется "положение (N)"), стояночное положение (которое именуется "положение (P)") и положение заднего хода (которое именуется "положение (R)"). Кулиса 100 переключения выполняется так, что рычаг 502 переключения может перемещаться вниз на схеме, изображенной на фиг.4, от положения, соответствующего положению (P), до положений (R), (N) и (D).
Дополнительно, траектория 102 переключения соединяется с дополнительной кулисой 104. Траектория 102 переключения соединяется с центральной частью дополнительной кулисы 104, т.е. центральной частью в продольном направлении на схеме, изображенной на фиг.4. Положение переключения (которое в дальнейшем именуется положение (S)) устанавливается в центральной части дополнительной кулисы 104, и это положение (S) соответствует режиму ручного переключения, в котором передаточное число фиксируется на значении, соответствующем передаче, выбранной водителем. Когда рычаг 502 переключения перемещается направо на схеме, изображенной на фиг.4, от положения (D), он приходит в положение (S).
Внутри дополнительной кулисы 104, когда рычаг 502 переключения перемещается вверх на схеме, изображенной на фиг.4, от положения (S), он приходит в положение (+). Когда рычаг 502 переключения перемещается вниз на схеме, изображенной на фиг.4, от положения (S), он приходит в положение (-). Форма кулисы 100 переключения не ограничивается вышеупомянутой. Кулиса 100 переключения может располагаться рядом с местом водителя так, что направление вверх на схеме, изображенной на фиг.4, соответствует направлению вперед относительно транспортного средства. Кроме того, кулиса 100 переключения может располагаться рядом с местом водителя так, что направление вверх на схеме, изображенной на фиг.4, соответствует направлению вверх относительно транспортного средства.
Водитель действует рычагом 502 переключения по траектории 102 переключения, сформированной в кулисе 100 переключения, для перемещения рычага 502 переключения в требуемое положение (положение переключения). Изменяя положение рычага 502 переключения, водитель может выбирать состояние передачи мощности механизма 200 распределения мощности.
Когда водитель перемещает рычаг 502 переключения в положение (D), датчик 504 положения переключения передает сигнал, указывающий выбор положения (D). Когда ЭБУ 500 принимает сигнал, указывающий выбор положения (D), от датчика 504 положения переключения, он управляет транспортным средством в режиме автоматического переключения. А именно ЭБУ 500 непрерывно изменяет передаточное число (т.е. (частота вращения входного вала 210)/(частота вращения выходного вала 220)) механизма 200 распределения мощности согласно состоянию транспортного средства и управляет двигателем 120 и ЭГ(1) 140B так, чтобы механизм 200 распределения мощности мог функционировать как бесступенчатая коробка передач.
Когда водитель перемещает рычаг 502 переключения в положение (S), датчик 504 положения переключения передает сигнал, указывающий выбор положения (S). Когда ЭБУ 500 принимает от датчика 504 положения переключения сигнал, указывающий, что водитель переместил рычаг 502 переключения из положения (S) в положение (+) (т.е. водитель выполнил действие, которое можно также назвать "действие (+)"), ЭБУ 500 переходит на одну повышающую передачу, если исходить из передачи, выбранной водителем в настоящее время. Когда ЭБУ 500 принимает от датчика 504 положения переключения сигнал, указывающий, что водитель переместил рычаг 502 переключения из положения (S) в положение (-) (т.е. водитель выполнил действие, которое можно также назвать "действие (-)"), ЭБУ 500 переходит на одну понижающую передачу, если исходить из передачи, выбранной водителем в настоящее время.
Когда ЭБУ 500 принимает от датчика 504 положения переключения сигнал, указывающий выбор положения (S), он управляет транспортным средством в режиме ручного переключения. А именно, когда выбирается положение (S) и транспортное средство входит в режим ручного переключения, ЭБУ 500 устанавливает наименьшую предельную частоту NE(MIN) вращения для частоты NE вращения двигателя на основании карты отображения, используя скорость V транспортного средства и передачу, выбранную водителем, в качестве параметров, как показано на фиг.5. ЭБУ 500 управляет двигателем 120 и ЭГ(1) 140B так, что частота NE вращения двигателя не опускается ниже наименьшей предельной частоты NE(MIN) вращения. В последующем описании состояние, в котором и двигатель 120, и ЭГ(1) 140B производят крутящие моменты, называется "состоянием привода с нагрузкой". Способ управления транспортным средством в ручном режиме переключения этим не ограничивается. Например, ЭБУ 500 может управлять двигателем 120 и ЭГ(1) 140B так, что передаточное число механизма 200 распределения мощности ограничивается согласно передаче, выбранной водителем, и вследствие этого механизм 200 распределения мощности функционирует как ступенчатая или дискретная коробка передач.
Когда положение ACC дроссельной заслонки находится практически на нулевой отметке, ЭБУ 500 прекращает подачу топлива в двигатель 120 для сохранения двигателя 120 в состоянии сокращенного потребления топлива. В состоянии сокращенного потребления топлива ЭБУ 500 управляет состоянием выхода ЭГ(1) 140B. В данном варианте осуществления "состояние выхода" отражает состояние, в котором ЭБУ 500 передает сигнал управления электродвигателем на обратный преобразователь 154, чтобы выходным крутящим моментом ЭГ(1) 140B можно было управлять.
Когда положение ACC дроссельной заслонки не находится практически на нулевой отметке и не требуется мощность на выходе двигателя 120 (т.е. когда требуемый крутящий момент PE двигателя, который будет описан позже, является практически нулевым), ЭБУ 500 сохраняет ЭГ(1) 140B в состоянии без мощности на выходе и сохраняет двигатель 120 в состоянии холостого хода. В данном варианте осуществления состояние без мощности на выходе означает состояние, в котором передача сигнала управления электродвигателем от ЭБУ 500 на обратный преобразователь 154 прерывается и выходным крутящим моментом ЭГ(1) 140B нельзя управлять. В последующем описании когда ЭГ(1) 140B управляется так, чтобы оставаться в состоянии без мощности на выходе, а двигатель 120 управляется так, чтобы оставаться в состоянии холостого хода, это состояние также называется как "состояние самоподдерживающегося привода".
Чтобы управлять двигателем 120 для поддержания его в состоянии холостого хода, ЭБУ 500 регулирует частоту NE вращения двигателя, выдерживая ее равной предварительно заданной целевой частоте NE(0) вращения на холостом ходу. В состоянии самоподдерживающегося привода частота NE вращения двигателя регулируется так, чтобы быть равной целевой частоте вращения на холостом ходу.
В транспортном средстве с гибридным приводом, обладающем упомянутыми выше конструкциями, когда водитель выбирает режим ручного переключения и транспортное средство находится в состоянии привода с нагрузкой и в состоянии сокращенного потребления топлива, значение наименьшего предела частоты NE вращения двигателя регулируется для достижения наименьшей предельной частоты NE(MIN) вращения. В состоянии самоподдерживающегося привода частота NE вращения двигателя регулируется так, чтобы быть равной целевой частоте NE(0) вращения на холостом ходу. Следовательно, если имеет место большая разность между наименьшей предельной частотой NE(MIN) вращения и целевой частотой NE(0) вращения на холостом ходу, частота NE вращения двигателя быстро меняется, что приводит к неожиданному сотрясению транспортного средства каждый раз, когда состояние привода с нагрузкой и состояние сокращенного потребления топлива изменяются на состояние самоподдерживающегося привода, и наоборот.
Соответственно, этот вариант осуществления изменяет целевое значение частоты NE вращения двигателя во время пребывания в состоянии самоподдерживающегося привода согласно режиму переключения и состоянию ЭГ(1) 140B, а конкретно изменяет ее с целевой частоты NE(0) вращения на холостом ходу на наименьшую предельную частоту NE(MIN) вращения.
Со ссылкой на фиг.6 будет описана функциональная структурная схема устройства управления согласно варианту осуществления. Как показано на фиг.6, это устройство управления включает в себя блок 520 определения состояния ЭГ(1), блок 522 распознавания информации о ручном переключении, блок 524 вычисления наименьшей предельной частоты вращения, блок 526 установки целевой частоты вращения двигателя и устройство 528 управления частотой вращения двигателя.
Блок 520 определения состояния ЭГ(1) определяет, находится ли ЭГ(1) 140B в состоянии с мощностью на выходе или в состоянии без мощности на выходе на основании сигналов, поступающих от датчика 508 положения дроссельной заслонки и датчика 512 скорости транспортного средства.
На основании сигнала, поступающего от датчика 504 положения переключения, блок 522 распознавания информации о ручном переключении распознает тот факт, что водитель выбрал ручной режим переключения, а также распознает передачу, которая выбирается водителем.
Блок 524 вычисления наименьшей предельной частоты вращения вычисляет наименьшую предельную частоту NE(MIN) вращения двигателя 120 на основании сигнала, поступающего от датчика 512 скорости транспортного средства и от датчика 504 положения переключения.
Блок 526 установки целевой частоты вращения двигателя устанавливает целевую частоту вращения двигателя 120 на основании сигналов, поступающих от блока 520 определения состояния ЭГ(1), блока 522 распознавания информации о ручном переключении и блока 524 вычисления наименьшей предельной частоты вращения.
Устройство 528 управления частотой вращения двигателя управляет, по меньшей мере, двигателем 120 или обратным преобразователем 154 так, чтобы двигатель 120 работал с целевой частотой вращения, установленной блоком 526 установки целевой частоты вращения двигателя.
Устройство управления согласно варианту осуществления, которое обладает упомянутыми выше функциональными блоками, может быть реализовано или при помощи аппаратного обеспечения, преимущественно сформированного из базовых деталей с цифровыми и/или аналоговыми схемами, или при помощи ЦП (центрального процессора), включенного в состав ЭБУ, и запоминающего устройства, а также программного обеспечения, преимущественно сформированного из программ, которые считываются из запоминающего устройства для исполнения на ЦП. В большинстве случаев подтверждается, что реализация при помощи аппаратного обеспечения выгодна с точки зрения быстродействия, а реализация при помощи программного обеспечения выгодна с точки зрения внесения изменений в конструкцию. Последующее описание будет дано для случая, когда устройство управления реализуется при помощи программного обеспечения. Носитель записи, несущий на себе такие программы, также является одним из вариантов настоящего изобретения.
Далее со ссылкой на фиг.7 будет дано описание согласно управляющей структуре программы, исполняемой на ЭБУ 500, который является устройством управления согласно варианту осуществления. Исполнение этой программы повторяется в цикле через предварительно заданное время.
На этапе (что в дальнейшем будет сокращенно обозначаться как "S") 100 ЭБУ 500 выявляет скорость V транспортного средства на основании сигнала от датчика 512 скорости транспортного средства.
На этапе S102 ЭБУ 500 распознает частоту NE вращения двигателя на основании сигнала от датчика 510 частоты вращения двигателя.
На этапе S104 ЭБУ 500 распознает положение ACC дроссельной заслонки на основании сигнала от датчика 508 положения дроссельной заслонки.
На этапе S106 ЭБУ 500 распознает режим переключения, выбранный водителем, на основании сигнала от датчика 504 положения переключения.
На этапе S108 ЭБУ 500 вычисляет требуемый крутящий момент PE двигателя на основании скорости V транспортного средства и положения ACC дроссельной заслонки. Например, ЭБУ 500 вычисляет требуемый крутящий момент PE двигателя на основании карты отображения, используя скорость V транспортного средства и положение ACC дроссельной заслонки в качестве параметров, как показано на фиг.8. При отображении, показанном на фиг.8, на оси абсцисс задается скорость V транспортного средства, на оси ординат задается положение ACC дроссельной заслонки, и требуемый крутящий момент PE двигателя вычисляется исходя из области, содержащей точки пересечения скорости V транспортного средства и положения ACC дроссельной заслонки. Если область сечения крутящего момента двигателя содержит точку пересечения скорости V транспортного средства и положения ACC дроссельной заслонки, требуемый крутящий момент PE двигателя, вычисленный ЭБУ 500, практически равен нулю, даже когда положение ACC дроссельной заслонки не находится практически на нулевой отметке. Метод вычисления требуемого крутящего момента PE двигателя не ограничивается приведенным выше.
На этапе S110 ЭБУ 500 определяет, является распознанный режим переключения ручным режимом переключения или нет. Если он является ручным режимом переключения (ДА на этапе S110), процесс переходит к этапу S112. В противном случае (НЕТ на этапе S110) проведение этого процесса заканчивается.
На этапе S112 ЭБУ 500 распознает передачу, выбранную водителем, на основании сигнала от датчика 504 положения переключения.
На этапе S114 ЭБУ 500 вычисляет наименьшую предельную частоту NE(MIN) вращения на основании скорости V транспортного средства и передачи. ЭБУ 500 вычисляет наименьшую предельную частоту NE(MIN) вращения на основании карты отображения (см. фиг.5), которая использует скорость V транспортного средства и передачу в качестве параметров. Метод вычисления наименьшей предельной частоты NE(MIN) вращения не ограничивается приведенным выше.
На этапе S116 ЭБУ 500 определяет, является требуемый крутящий момент PE двигателя практически нулевым или нет. Если требуемый крутящий момент PE двигателя является практически нулевым (ДА на этапе S116), процесс переходит к этапу S122. В противном случае (НЕТ на этапе S116) процесс переходит к этапу S118.
На этапе S118 ЭБУ 500 устанавливает целевую частоту вращения двигателя равной или большей, чем наименьшая предельная частота NE(MIN) вращения.
На этапе S120 ЭБУ 500 передает управляющий сигнал, соответствующий целевой частоте вращения двигателя, на двигатель 120 и обратный преобразователь 154.
На этапе S122 ЭБУ 500 определяет, находится транспортное средство в состоянии сокращенного потребления топлива или нет. Например, если положение ACC дроссельной заслонки находится практически на нулевой отметке, ЭБУ 500 определяет, что выполняется сокращенное потребление топлива. Если транспортное средство находится в состоянии сокращенного потребления топлива (ДА на этапе S122), процесс переходит к этапу S124. В противном случае (НЕТ на этапе S122) процесс переходит к этапу S128.
На этапе S124 ЭБУ 500 устанавливает целевую частоту вращения двигателя на наименьшую предельную частоту NE(MIN) вращения или большую.
На этапе S126 ЭБУ 500 передает управляющий сигнал, соответствующий целевой частоте вращения двигателя, на обратный преобразователь 154.
На этапе S128 ЭБУ 500 изменяет целевую частоту вращения на холостом ходу с предварительно заданной частоты NE(0) вращения на наименьшую предельную частоту NE(MIN) вращения.
На этапе S130 ЭБУ 500 передает управляющий сигнал, соответствующий целевой частоте вращения на холостом ходу, на двигатель 120.
С учетом структур и блок-схемы, описанных выше, ЭБУ 500, т.е. устройство управления согласно варианту осуществления, управляет работой транспортного средства как описано ниже.
Предположим, что водитель выбрал вторую передачу при ручном режиме переключения, положение ACC дроссельной заслонки понижается во время движения со скоростью V(1) транспортного средства, что показано на фиг.9, требуемый крутящий момент PE двигателя становится практически нулевым в момент времени T(1), и в дальнейшем положение ACC дроссельной заслонки становится практически нулевым в более поздний момент времени T(2).
Распознаются (этапы S110, S102 и S104) скорость V(1) транспортного средства, частота вращения NE двигателя и положение ACC дроссельной заслонки, и вычисляется (этап S108) требуемый крутящий момент PE двигателя. Поскольку транспортное средство находится в режиме ручного переключения (ДА на этапе S110), распознается (этап S112) вторая передача, которая является передачей, выбранной водителем, и вычисляются (этап S114) скорость V(1) транспортного средства и наименьшая предельная частота NE(MIN)(1) вращения, соответствующие второй передаче, что показано на фиг.10.
До момента времени T(1) требуемый крутящий момент PE двигателя не является практически нулевым (НЕТ на этапе S116), транспортное средство находится в состоянии привода с нагрузкой, что показано на фиг.11(C). Следовательно, целевая частота вращения двигателя устанавливается на NE(MIN)(1), что показано на фиг.11(D) для этапа S118, при этом и двигатель 120 и ЭГ(1) 140B управляются так, что значение наименьшего предела частоты NE вращения двигателя становится равным NE(MIN)(1), что показано на фиг.11(E).
В момент времени T(1) требуемый крутящий момент PE двигателя является практически нулевым (ДА на этапе S116), положение ACC дроссельной заслонки не находится практически на нулевой отметке, и не имеет места состояние сокращенного потребления топлива (НЕТ на этапе S122), так что транспортное средство входит в состояние самоподдерживающегося привода, что показано на фиг.11(C).
В упомянутом выше состоянии, если целевая частота вращения двигателя установлена на целевую частоту NE(0) вращения на холостом ходу (см. дополнительную линию из длинных и коротких пунктиров), имеет место большая разность между NE(MIN)(1) и NE(0), так что частота NE вращения двигателя быстро повышается, что приводит к сотрясению, что отображено дополнительной линией из длинных и коротких пунктиров на фиг.11(E).
Соответственно, в период самоподдерживающегося привода (ДА на этапе S116 и НЕТ на этапе S122) целевая частота вращения на холостом ходу изменяется с NE(0) на NE(MIN)(1) на этапе S128, что показано на фиг.11(D), и двигатель 120 управляется на этапе S130 так, что частота NE вращения двигателя становится равной NE(MIN)(1), что показано на фиг.11(E). Таким образом, даже когда состояние привода переключается из состояния привода с нагрузкой в состояние самоподдерживающегося привода, частота NE вращения двигателя может регулироваться так, чтобы оставаться постоянной около NE(MIN)(1). Следовательно, частота NE вращения двигателя является стабильной, и зарождение сотрясения может быть погашено.
В момент времени T(2) требуемый крутящий момент PE двигателя является практически нулевым (ДА на этапе S116), и положение ACC дроссельной заслонки находится практически на нулевой отметке, так что двигатель входит в состояние сокращенного потребления топлива (ДА на этапе S122), что показано на фиг.11(C). Следовательно, как показано на фиг.11(D), целевая частота вращения двигателя устанавливается на NE(MIN)(1) на этапе S124, и ЭГ(1) 140B управляется так, что частота NE вращения двигателя становится равной NE(MIN)(1), что показано на фиг.11(E), на этапе S126. Таким образом, даже если состояние изменяется с состояния самоподдерживающегося привода на состояние сокращенного потребления топлива, частота NE вращения двигателя может регулироваться так, чтобы оставаться постоянной около NE(MIN)(1). Следовательно, частота NE вращения двигателя является стабильной, и зарождение сотрясения может быть погашено.
Согласно устройству управления варианта осуществления, который описан выше, при выборе водителем ручного режима переключения целевая частота вращения при холостом ходе двигателя изменяется с заданной частоты вращения на наименьшую предельную частоту вращения при ручном режиме переключения. Следовательно, даже если имеет место переключение из состояния привода с нагрузкой и состояния сокращенного потребления топлива в состояние самоподдерживающегося привода и наоборот, в процессе движения в ручном режиме переключения частота вращения двигателя может сохраняться стабильной на наименьшей предельной частоте вращения при ручном режиме переключения, так что зарождение сотрясения может быть погашено.
Хотя настоящее изобретение было подробно описано и проиллюстрировано, совершенно понятно, что вышеупомянутое является только иллюстрацией и примером и не должно приниматься за ограничение объема настоящего изобретения, определяемого прилагаемой формулой изобретения.
Реферат
Изобретение относится к управлению транспортным средством. Устройство управления по первому варианту содержит блок распознавания, управляющее устройство. Блок распознавания распознает режим переключения, выбранный водителем из автоматического режима переключения и ручного режима переключения. Управляющее устройство управляет источниками энергии для изменения частоты вращения на холостом ходу двигателя внутреннего сгорания в зависимости от режима переключения. Устройство управления по второму варианту содержит средство для распознавания режима переключения и средство управления. Средство распознавания распознает режим переключения, выбранный водителем из автоматического режима переключения и ручного режима переключения. Средство управления управляет источниками энергии для изменения частоты вращения на холостом ходу двигателя внутреннего сгорания в зависимости от режима переключения. Способ управления включает распознавание режима переключения и управление источниками энергии. Технический результат заключается в обеспечении стабильной частоты вращения двигателя. 3 н. и 9 з.п. ф-лы, 11 ил.
Формула
и управляющее устройство, управляющее источниками энергии для движения таким образом, чтобы изменять частоту вращения на холостом ходу двигателя внутреннего сгорания при выборе ручного режима переключения по сравнению с частотой вращения на холостом ходу, достигаемой при выборе автоматического режима переключения.
Документы, цитированные в отчёте о поиске
Носитель записи, устройство и способ воспроизведения носителя записи и способ изготовления носителя записи
Комментарии