Гибридное транспортное средство, способ управления гибридным транспортным средством - RU2415038C1
Код документа: RU2415038C1
Чертежи










Описание
Область техники
Настоящее изобретение относится к гибридному транспортному средству, снабженному двигателем внутреннего сгорания и вращающейся электрической машиной, служащими источником механической энергии для приведения в движение транспортного средства, и имеющему первый режим пробега, во время которого двигатель внутреннего сгорания остановлен, и второй режим пробега, во время которого двигатель внутреннего сгорания задействован. Настоящее изобретение также относится к способу управления гибридным транспортным средством.
Уровень техники
В последнее время большое внимание уделяется гибридному транспортному средству как транспортному средству, не оказывающему неблагоприятного воздействия на окружающую среду. В дополнение к обычному двигателю гибридное транспортное средство снабжено устройством для хранения энергии, инвертором и электромотором, который приводится в действие инвертором и служит источником механической энергии для приведения в движение транспортного средства.
В качестве одного из примеров такого гибридного транспортного средства известно транспортное средство, имеющее режим пробега с использованием электромотора, при котором гибридное транспортное средство движется при остановленном двигателе (далее такой режим также называется "EV-режимом", а режим пробега, при котором транспортное средство движется с задействованным двигателем, также называется "HV-режимом") (см., например, выложенную заявку на японский патент №8-19114).
Однако в гибридном транспортном средстве двигатель и компоненты, задействуемые в соответствии с приведением в действие двигателя, не задействованы в EV-режиме. Следовательно, возникает проблема, заключающаяся в том, что сроки обслуживания двигателя и компонентов, относящихся к двигателю, не согласуются с реальными состояниями использования, когда их определяют на основе совокупного расстояния пробега или совокупного времени использования транспортного средства.
Если гибридное транспортное средство способно заряжать устройство для хранения энергии при помощи внешнего источника питания (например, сетевого источника питания), то, в частности, увеличивается расстояние пробега в EV-режиме. Следовательно, нельзя точно узнать состояния использования двигателя и компонентов, относящихся к двигателю, на основе совокупного расстояния пробега или совокупного времени использования транспортного средства.
Сущность изобретения
Настоящее изобретение создано для решения описанных выше проблем, и его задачей является обеспечить гибридное транспортное средство, способное быстро определять состояния использования двигателя и компонентов, относящихся к двигателю.
Другой задачей настоящего изобретения является обеспечение способа управления гибридным транспортным средством, позволяющего быстро определять состояния использования двигателя и компонентов, относящихся к двигателю, и машиночитаемого носителя записи, хранящего программу для выполнения компьютером способа управления.
Согласно настоящему изобретению гибридное транспортное средство представляет собой гибридное транспортное средство, снабженное двигателем внутреннего сгорания и вращающейся электрической машиной, служащими источником механической энергии для приведения в движение транспортного средства, и имеющее первый режим пробега, при котором двигатель внутреннего сгорания остановлен (EV-режим), и второй режим пробега, при котором двигатель внутреннего сгорания задействован (HV-режим). Гибридное транспортное средство включает первый и второй блоки вычисления показателя пробега и блок определения. Первый блок вычисления показателя пробега вычисляет первый показатель состояния, показывающий показатель пробега в первом режиме пробега. Второй блок вычисления показателя пробега вычисляет второй показатель состояния, показывающий показатель пробега во втором режиме пробега. Блок определения определяет необходимость обслуживания для элементов, входящих в состав транспортного средства, на основе упомянутых первого и второго показателей состояния.
В предпочтительном случае блок определения определяет необходимость обслуживания для двигателя внутреннего сгорания и элементов, задействуемых в соответствии с приведением в действие двигателя внутреннего сгорания из числа элементов транспортного средства на основе второго показателя состояния, и определяет необходимость обслуживания для оставшихся элементов на основе третьего показателя состояния, показывающего совокупный показатель пробега транспортного средства.
В более предпочтительном случае третий показатель состояния рассчитывают путем добавления второго показателя состояния к первому показателю состояния.
В предпочтительном случае первый показатель состояния представляет собой совокупное расстояние пробега в первом режиме пробега. Вместе с тем второй показатель состояния представляет собой совокупное расстояние пробега во втором режиме пробега.
В более предпочтительном случае второй блок вычисления показателя пробега рассчитывает совокупное расстояние пробега во втором режиме пробега исходя из предполагаемой скорости, заданной в соответствии с нагрузкой на двигатель внутреннего сгорания.
В более предпочтительном случае гибридное транспортное средство дополнительно включает заряжаемое устройство хранения электрической энергии и устройство генерации электрической энергии. Устройство хранения электрической энергии хранит электрическую энергию, расходуемую вращающейся электрической машиной. Устройство генерации электрической энергии выполнено с возможностью зарядки устройства хранения электрической энергии за счет использования механической энергии двигателя внутреннего сгорания.
Кроме того, в предпочтительном случае первый показатель состояния представляет собой совокупное время пробега в первом режиме пробега. Вместе с тем второй показатель состояния представляет собой совокупное время пробега во втором режиме пробега.
В предпочтительном случае первый блок вычисления показателя пробега рассчитывает первый показатель состояния путем вычитания второго показателя состояния из третьего показателя состояния, показывающего совокупный показатель пробега транспортного средства.
Кроме того, в предпочтительном случае второй блок вычисления показателя пробега рассчитывает второй показатель состояния путем вычитания первого показателя состояния из третьего показателя состояния, показывающего совокупный показатель пробега транспортного средства.
В предпочтительном случае гибридное транспортное средство дополнительно включает в себя блок памяти, который хранит первый и второй показатели состояния.
В предпочтительном случае гибридное транспортное средство дополнительно включает в себя блок отображения, который отображает первый и второй показатели состояния.
В предпочтительном случае гибридное транспортное средство дополнительно включает в себя блок передачи, который передает первый и второй показатели состояния за пределы транспортного средства.
В предпочтительном случае гибридное транспортное средство дополнительно включает в себя заряжаемое устройство хранения электрической энергии, которое хранит электрическую энергию, расходуемую вращающейся электрической машиной. При этом устройство хранения электрической энергии имеет такую емкость, чтобы транспортное средство могло проходить расстояние, по меньшей мере, 10 км в первом режиме пробега.
В предпочтительном случае гибридное транспортное средство дополнительно включает в себя заряжаемое устройство хранения электрической энергии, штепсель, который может быть соединен с источником питания, являющимся внешним по отношению к транспортному средству, и устройство зарядки электрической энергией. При этом устройство зарядки электрической энергией выполнено с возможностью приема электрической энергии от штепселя, преобразования электрической энергии в напряжение и зарядки устройства хранения электрической энергии.
В более предпочтительном случае гибридное транспортное средство дополнительно включает в себя другую вращающуюся электрическую машину, отличающуюся от упомянутой вращающейся электрической машины. При этом каждая из вращающейся электрической машины и другой электрической машины включает в себя в качестве статорной обмотки многофазную обмотку с соединением звездой. Устройство зарядки электрической энергией включает в себя первый и второй инверторы, пару линий подачи электрической энергии и блок управления зарядкой. Первый инвертор предусмотрен для упомянутой вращающейся электрической машины. Второй инвертор соединен с первым инвертором параллельно и предусмотрен для вышеописанной другой вращающейся электрической машины. Пара линий подачи электрической энергии соединяет штепсель с нейтральной точкой многофазной обмотки вращающейся электрической машины и нейтральной точкой многофазной обмотки вышеописанной другой вращающейся электрической машины. Блок управления зарядкой управляет первым и вторым инверторами таким образом, чтобы первый и второй инверторы преобразовывали электрическую энергию, подводимую в нейтральные точки от источника питания, являющегося внешним по отношению к транспортному средству, через пару линий электрической энергии, в напряжение, чтобы зарядить устройство хранения электрической энергии.
Вместе с тем согласно настоящему изобретению способ управления для транспортного средства представляет собой способ управления гибридным транспортным средством, снабженным двигателем внутреннего сгорания и вращающейся электрической машиной, служащими источником механической энергии для приведения в движение транспортного средства, и имеющим первый режим пробега, при котором двигатель внутреннего сгорания остановлен, и второй режим пробега, при котором двигатель внутреннего сгорания задействован. Способ управления включает в себя этап, на котором вычисляют первый показатель состояния, показывающий показатель пробега в первом режиме пробега, этап, на котором вычисляют второй показатель состояния, показывающий показатель пробега во втором режиме пробега, и этап, на котором определяют необходимость обслуживания для элементов, входящих в состав транспортного средства, на основе первого и второго показателей состояния.
В предпочтительном случае на этапе определения необходимости обслуживания для элементов, входящих в состав транспортного средства, необходимость обслуживания двигателя внутреннего сгорания и элементов, задействуемых в соответствии с приведением в действие двигателя внутреннего сгорания, из числа элементов транспортного средства определяют на основе второго показателя состояния, а необходимость обслуживания оставшихся элементов определяют на основе третьего показателя состояния, показывающего совокупный показатель пробега транспортного средства.
В более предпочтительном случае третий показатель состояния рассчитывают путем добавления второго показателя состояния к первому показателю состояния.
В предпочтительном случае первый показатель состояния представляет собой совокупное расстояние пробега в первом режиме пробега. Вместе с тем второй показатель состояния представляет собой совокупное расстояние пробега во втором режиме пробега.
В более предпочтительном случае на этапе вычисления второго показателя состояния совокупное расстояние пробега во втором режиме пробега рассчитывают исходя из предполагаемой скорости, заданной в соответствии с нагрузкой на двигатель внутреннего сгорания.
Кроме того, в предпочтительном случае первый показатель состояния представляет собой совокупное время пробега в первом режиме пробега. Вместе с тем второй показатель состояния представляет собой совокупное время пробега во втором режиме пробега.
В предпочтительном случае на этапе вычисления первого показателя состояния первый показатель рассчитывают путем вычитания второго показателя состояния из третьего показателя состояния, показывающего совокупный показатель пробега транспортного средства.
Кроме того, в предпочтительном случае на этапе вычисления второго показателя состояния второй показатель рассчитывают путем вычитания первого показателя состояния из третьего показателя состояния, показывающего совокупный показатель пробега транспортного средства.
В предпочтительном случае способ управления дополнительно включает в себя этап, на котором отображают первый и второй показатели состояния.
В предпочтительном случае способ управления дополнительно включает в себя этап, на котором передают первый и второй показатели состояния за пределы транспортного средства.
Кроме того, согласно настоящему изобретению машиночитаемый носитель записей хранит программу для выполнения компьютером любого из описанных выше способов управления.
В настоящем изобретении гибридное транспортное средство может работать в одном из следующих режимов: первом режиме пробега, при котором двигатель внутреннего сгорания остановлен (EV-режим), и втором режиме пробега, при котором двигатель внутреннего сгорания задействован (HV-режим). Вычисляют первый показатель состояния, показывающий показатель пробега в первом режиме пробега (EV-режим), и второй показатель пробега, показывающий показатель пробега во втором режиме пробега (HV-режим), и на основе вычисленных первого и второго показателей пробега определяют необходимость обслуживания для элементов, входящих в состав транспортного средства. Таким образом, гибридное транспортное средство может отличить испорченные элементы в соответствии с приведением в движение двигателя внутреннего сгорания от испорченных элементов вне зависимости от приведения в движение двигателя внутреннего сгорания, чтобы определить необходимость обслуживания для каждого из элементов.
Следовательно, согласно настоящему изобретению пользователь может принимать уведомление о необходимости обслуживания каждого из элементов, входящих в состав транспортного средства, на основе реального состояния использования.
Краткое описание чертежей
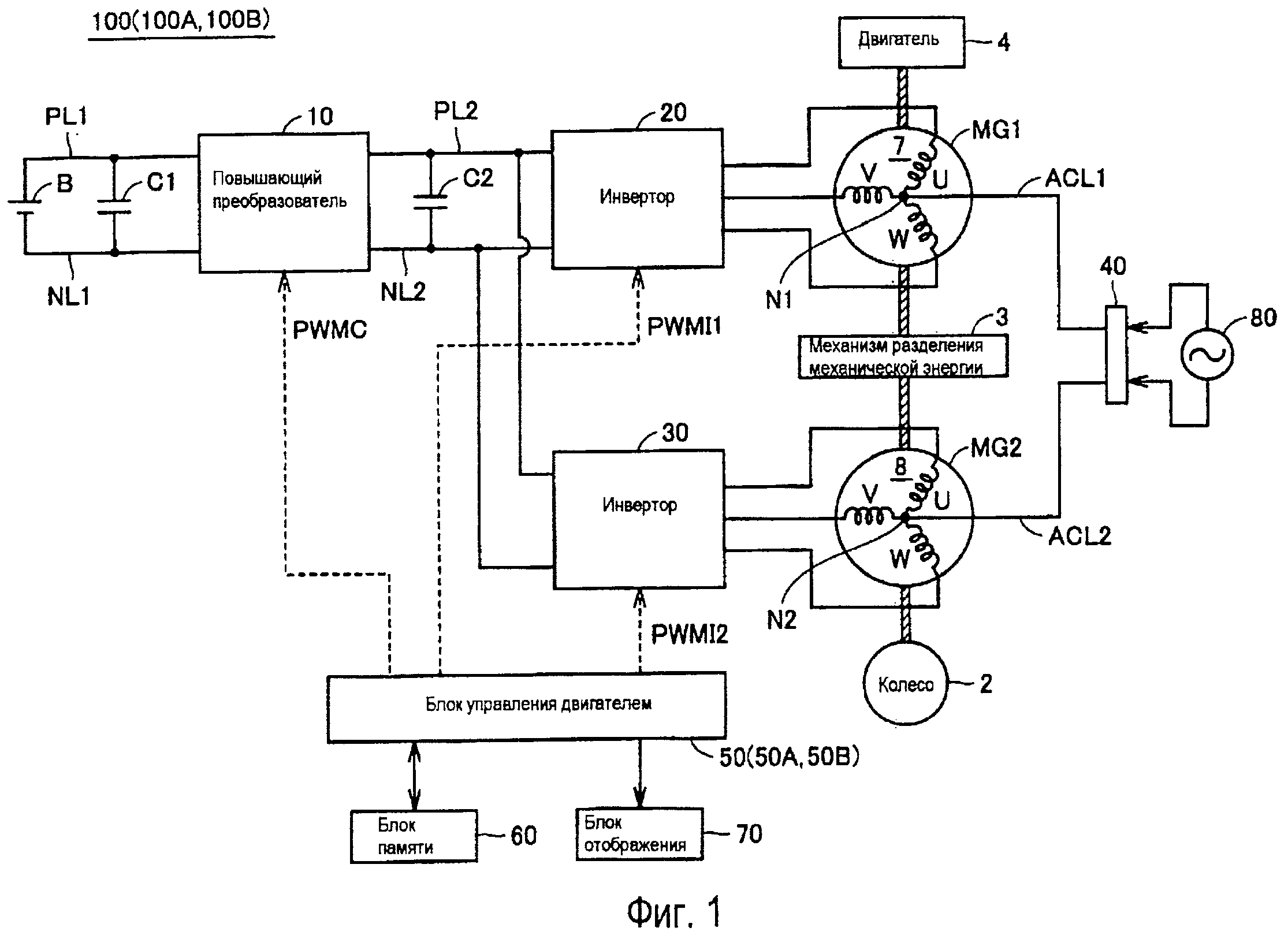
На Фиг.1 показана конфигурация силовой цепи гибридного транспортного средства согласно Варианту 1 реализации настоящего изобретения.
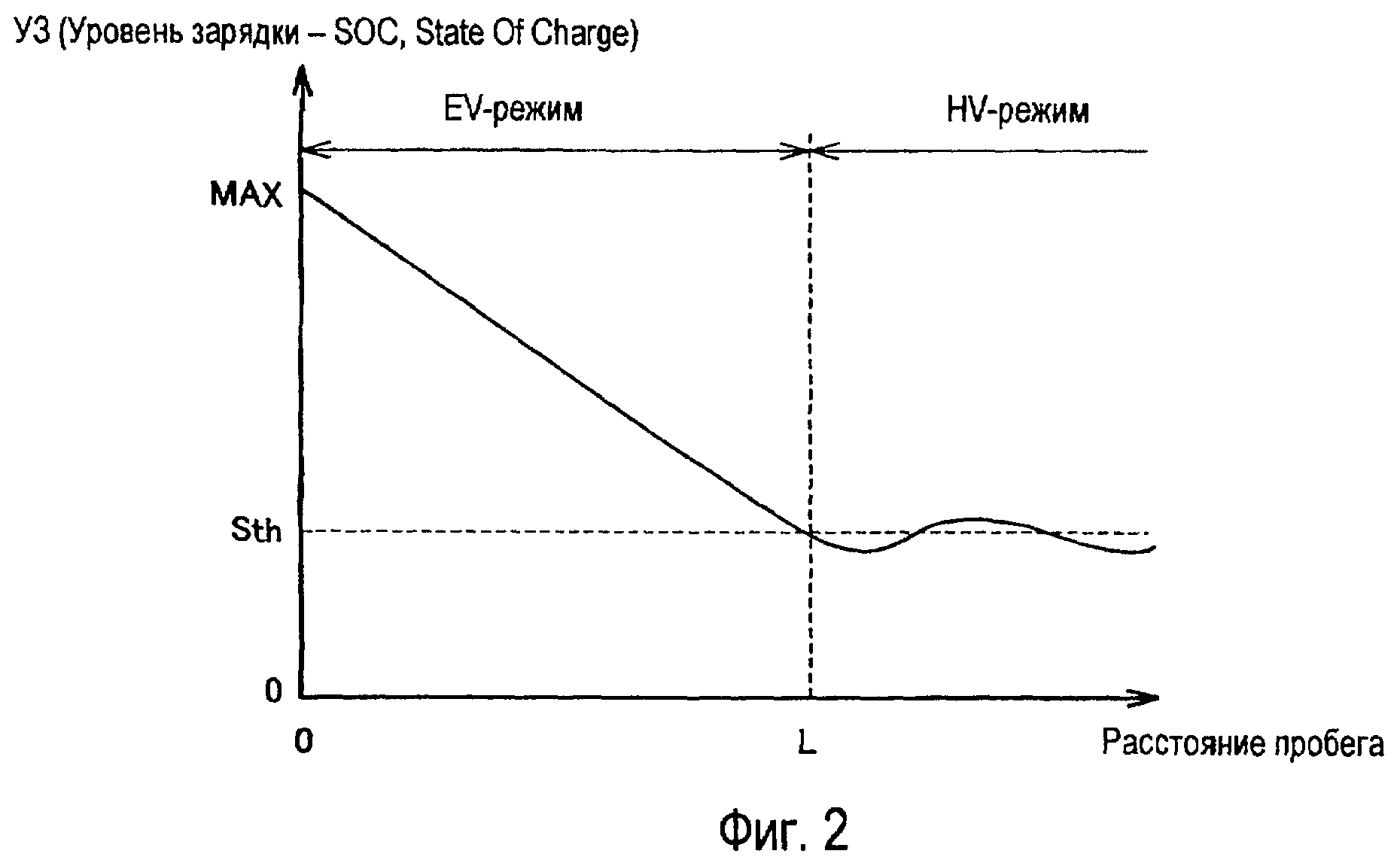
На Фиг.2 показано изменение режима пробега гибридного транспортного средства, показанного на Фиг.1.
На Фиг.3 приведена функциональная схема блока управления двигателем (ECU, Engine Control Unit), показанного на Фиг.1.
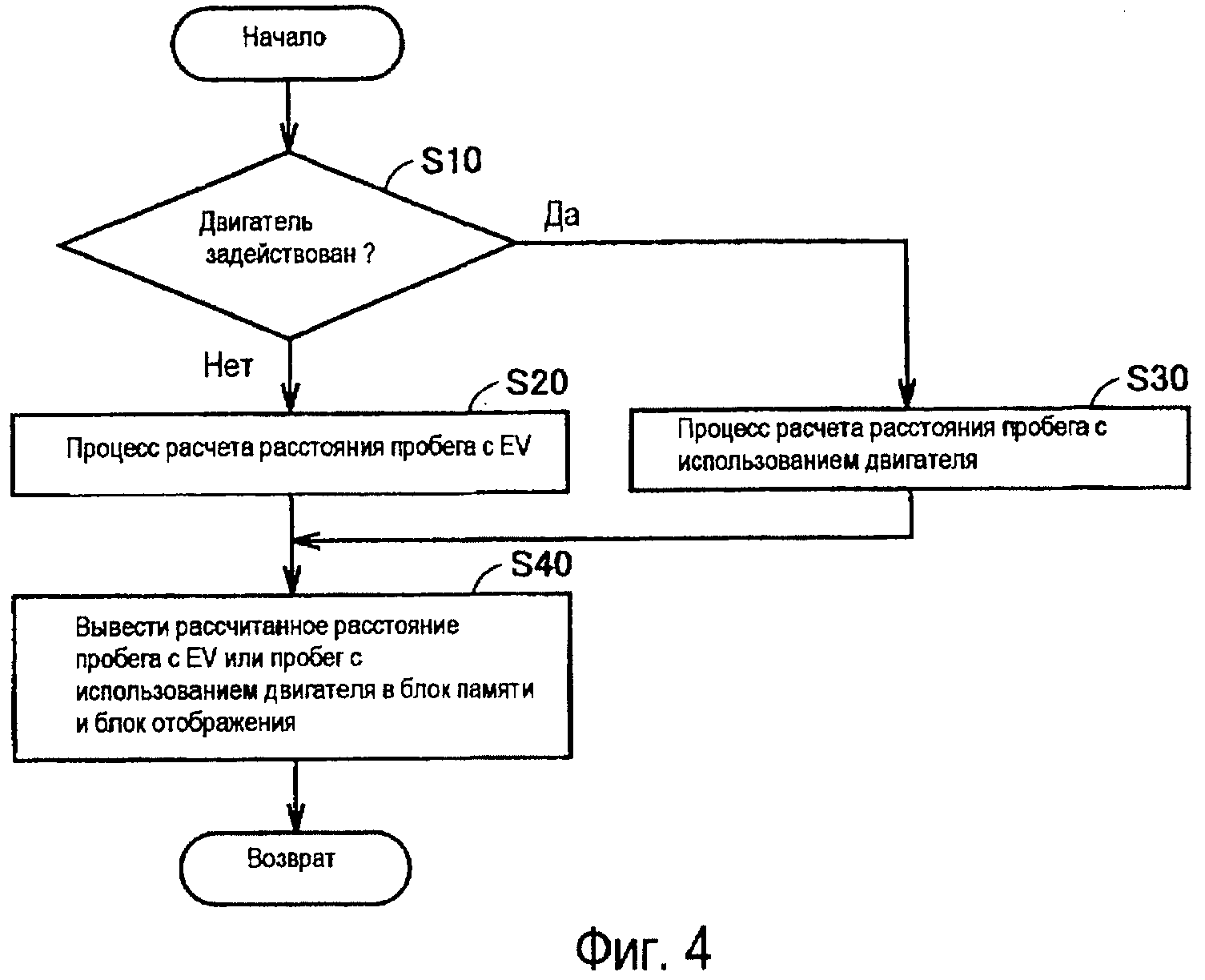
На Фиг.4 приведена блок-схема, относящаяся к процессу вычисления расстояния пробега, выполняемому блоком управления двигателем, показанным на Фиг.1.
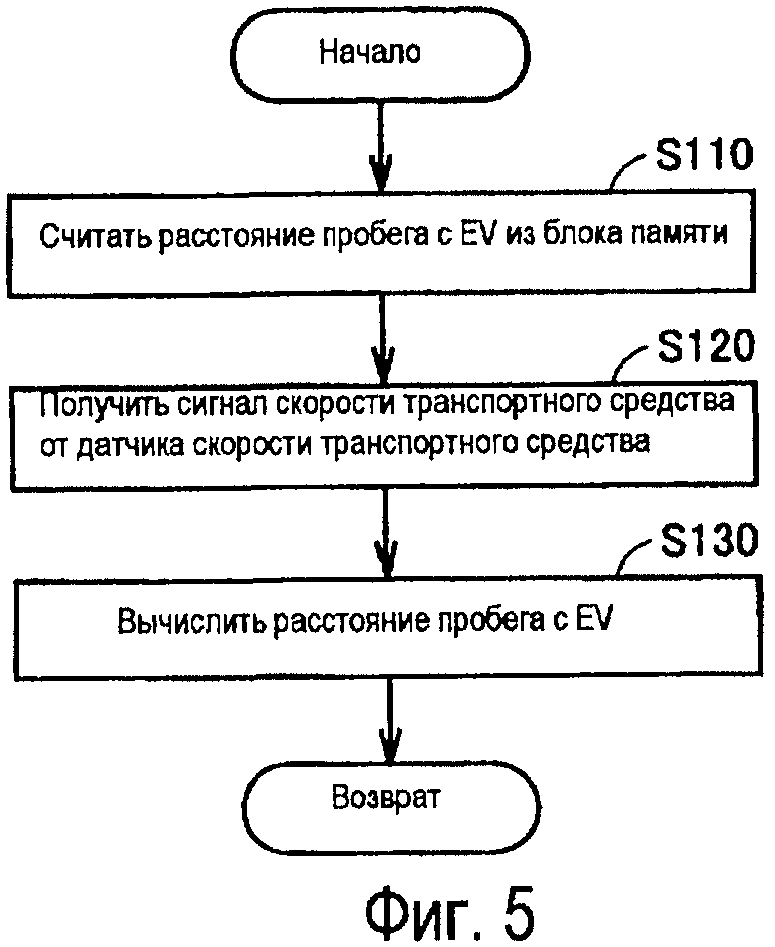
На Фиг.5 приведена блок-схема процесса расчета расстояния пробега с EV, показанного на Фиг.4.
На Фиг.6 приведена блок-схема процесса расчета расстояния пробега с использованием двигателя, показанного на Фиг.4.
На Фиг.7 приведена таблица соответствия скорости транспортного средства.
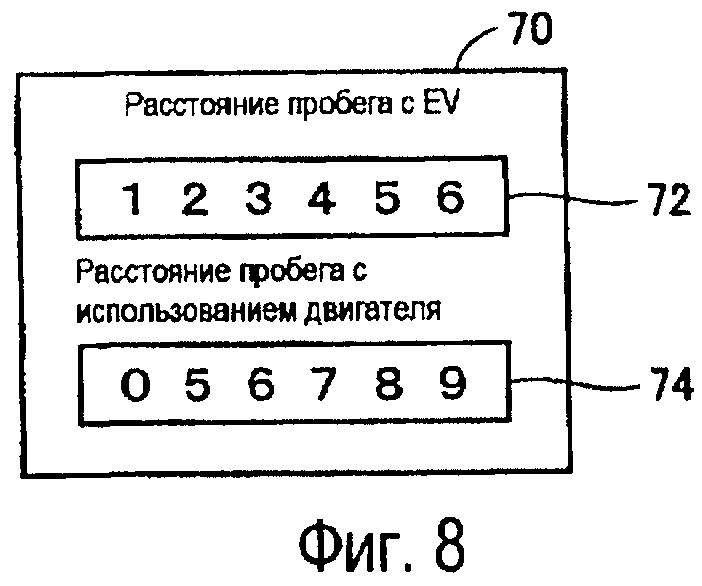
На Фиг.8 показан один из примеров состояния отображения блока отображения, показанного на Фиг.1.
На Фиг.9 приведена блок-схема, иллюстрирующая структуру управления в блоке управления режима пробега, показанного на Фиг.3.
На Фиг.10 показан схемный нуль-фазный эквивалент инверторов и мотор-генераторов, показанных на Фиг.1.
На Фиг.11 показана функциональная схема блока управления двигателем согласно Варианту 2 реализации настоящего изобретения.
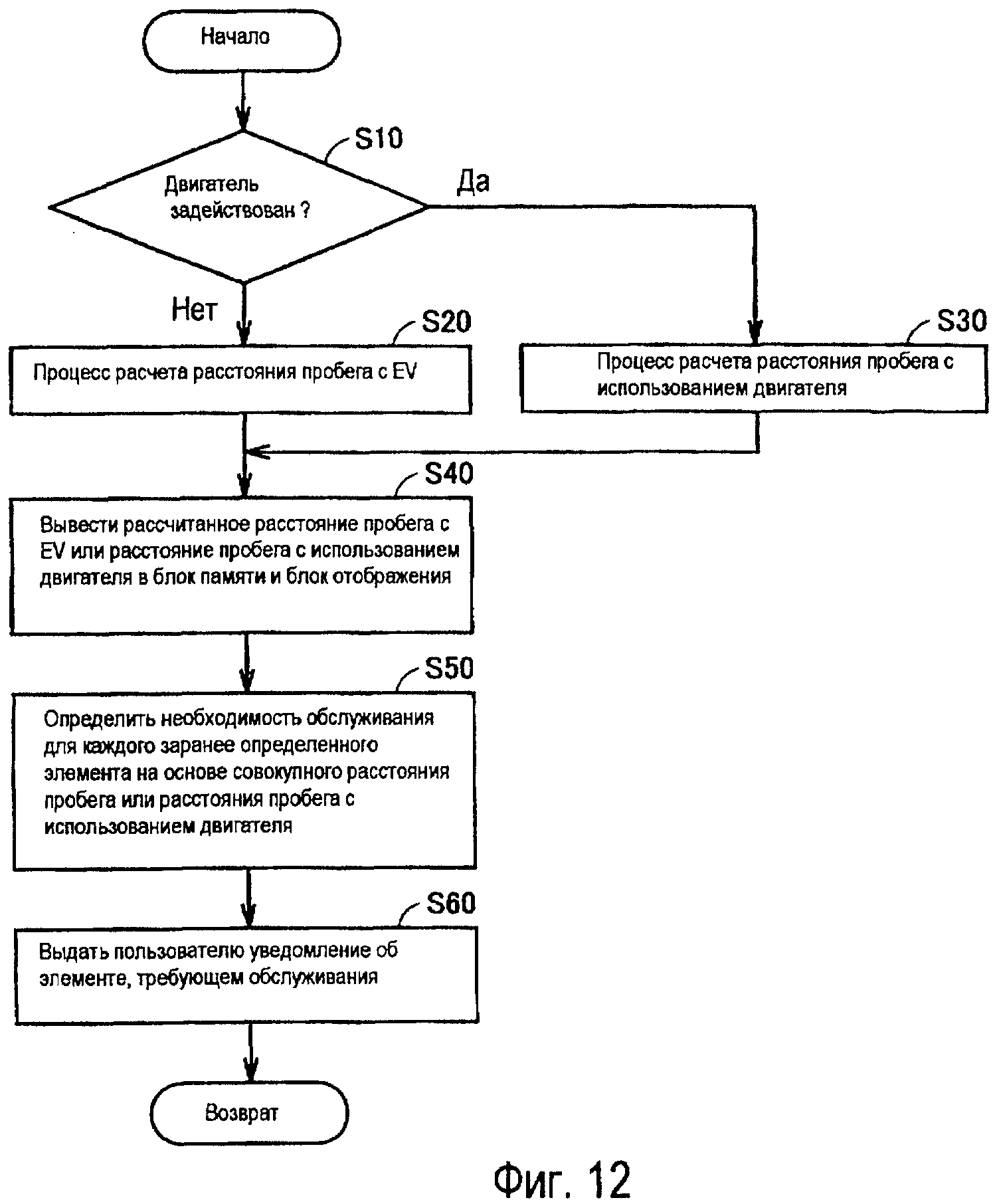
На Фиг.12 приведена блок-схема, относящаяся к процессу определения сроков обслуживания, выполняемому блоком управления двигателем, согласно Варианту 2 реализации настоящего изобретения.
На Фиг.13 показана функциональная схема блока управления двигателем согласно Варианту 3 реализации настоящего изобретения.
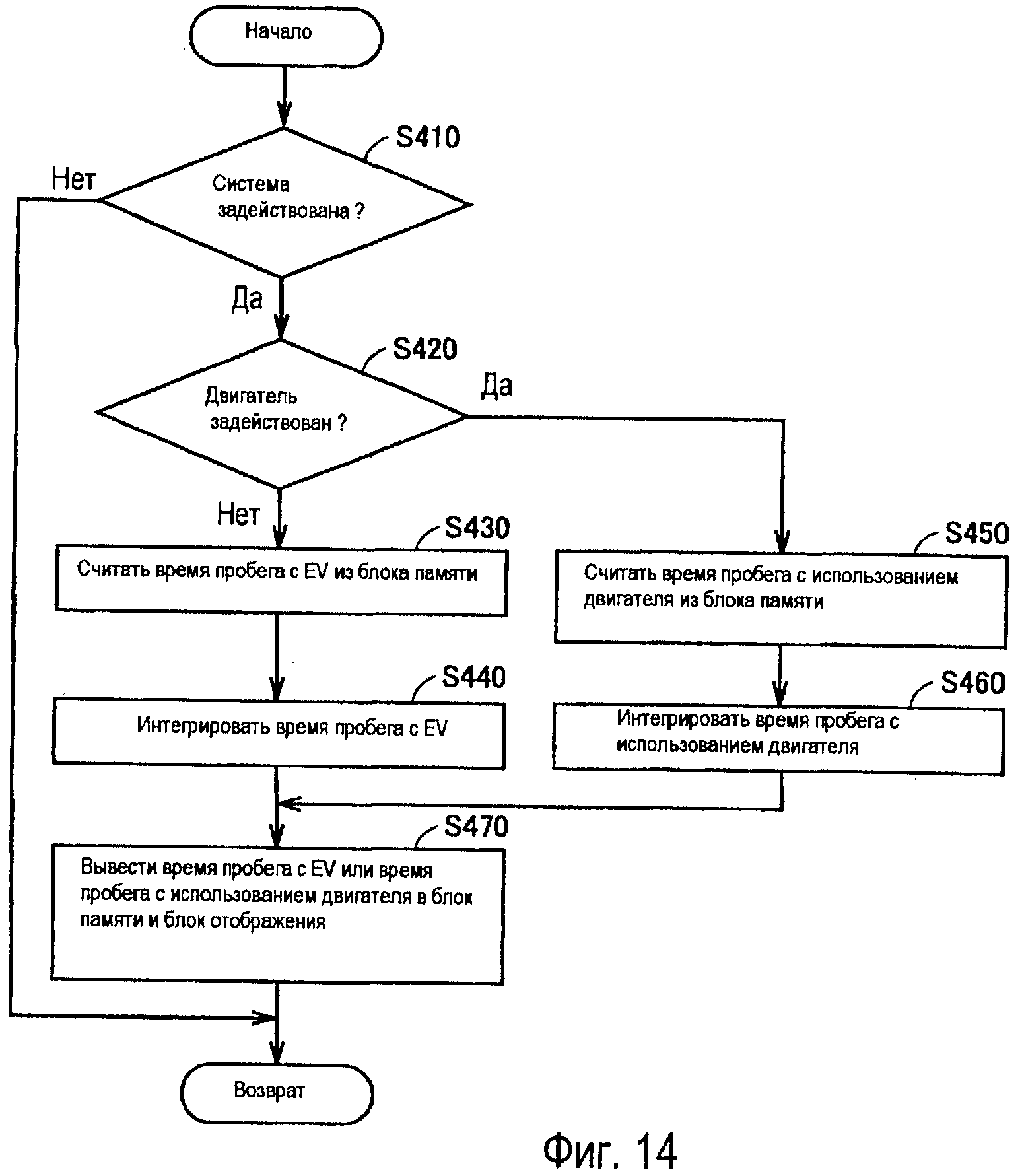
На Фиг.14 приведена блок-схема, относящаяся к процессу вычисления времени пробега, выполняемому блоком управления двигателем, согласно Варианту 3 реализации настоящего изобретения.
На Фиг.15 показана конфигурация силовой цепи гибридного транспортного средства согласно Варианту 4 реализации настоящего изобретения.
На Фиг.16 приведена блок-схема, относящаяся к процессу передачи, выполняемому блоком управления двигателем, показанным на Фиг.15.
На Фиг.17 показана конфигурация силовой цепи гибридного транспортного средства, которая дополнительно содержит заряжающий инвертор.
Предпочтительные варианты реализации изобретения
Далее со ссылкой на чертежи будет дано подробное описание вариантов реализации настоящего изобретения. На чертежах идентичные или соответствующие компоненты обозначены идентичными ссылочными обозначениями, поэтому их описание повторно дано не будет.
Вариант 1
На Фиг.1 показана конфигурация силовой цепи гибридного транспортного средства согласно Варианту 1 реализации настоящего изобретения. Как видно из Фиг.1, гибридное транспортное средство 100 включает двигатель 4, мотор-генераторы MG1 и MG2, механизм 3 разделения механической энергии и колесо 2. Кроме того, гибридное транспортное средство 100 также включает в себя устройство В хранения энергии, повышающий преобразователь 10, инверторы 20 и 30, линии PL1 и PL2 положительной полярности, линии NL1 и NL2 отрицательной полярности и конденсаторы С1 и С2. Дополнительно гибридное транспортное средство 100 также включает в себя линии ACL1 и ACL2 электрической энергии, штепсель 40 зарядки, электронный блок 50 управления (ECU), блок 60 памяти и блок 70 отображения.
Механизм 3 разделения механической энергии соединен с двигателем 4, мотор-генератором MG1 и мотор-генератором MG2 и распределяет механическую энергию в двигатель 4, мотор-генератор MG1 и мотор-генератор MG2. В качестве механизма 3 разделения механической энергии может быть использована, например, планетарная передача с тремя вращающимися валами, то есть центральным зубчатым колесом, водилом планетарной передачи и кольцевым зубчатым колесом. Упомянутые вращающиеся валы соединены соответственно с вращающимися валами двигателя 4, мотор-генератора MG1 и мотор-генератора MG2. Например, если коленчатый вал двигателя 4 проходит через центр полого ротора мотор-генератора MG1, то двигатель 4, мотор-генератор MG1 и мотор-генератор MG2 могут быть механически соединены с механизмом 3 разделения механической энергии.
Механическая энергия, создаваемая двигателем 4, распределяется при помощи механизма 3 разделения механической энергии на колесо 2 и мотор-генератор MG1. То есть двигатель 4 введен в состав гибридного транспортного средства 100 как источник механической энергии для приведения в движение колеса 2 и приведения в действие мотор-генератора MG1. Мотор-генератор MG1 введен в состав гибридного транспортного средства 100 для работы в качестве генератора, приводимого в действие двигателем 4, и работы в качестве мотора, способного запустить двигатель 4. Мотор-генератор MG2 введен в состав гибридного транспортного средства 100 в качестве источника механической энергии, который приводит в движение колесо 2.
Клемма положительной полярности устройства В хранения энергии соединена с линией PL1 положительной полярности, а клемма отрицательной полярности соединена с линией NL1 отрицательной полярности. Конденсатор С1 подключен между линией PL1 положительной полярности и линией NL1 отрицательной полярности. Повышающий преобразователь 10 подключен между линиями PL1, NL1 положительной и отрицательной полярности и линиями PL2, NL2 положительной и отрицательной полярности. Конденсатор С2 подключен между линией PL2 положительной полярности и линией NL2 отрицательной полярности. Инвертор 20 подключен между линиями PL2, NL2 положительной и отрицательной полярности и мотор-генератором MG1. Инвертор 30 подключен между линиями PL2, NL2 положительной и отрицательной полярности и мотор-генератором MG2.
Мотор-генераторы MG1 и MG2 включают в себя в качестве катушки статора соединенные звездой трехфазные катушки 7 и 8 соответственно. Трехфазная катушка 7 соединена с инвертором 20 и имеет нейтральную точку N1, которая соединена с линией ACL1 электрической энергии. Трехфазная катушка 8 соединена с инвертором 30 и имеет нейтральную точку N2, которая соединена с линией ACL2 электрической энергии.
Устройство В хранения энергии представляет собой заряжаемый источник питания постоянного тока, например никель-водородное вспомогательное устройство хранения энергии или литий-ионное вспомогательное устройство хранения энергии. Устройство В хранения энергии подает мощность постоянного тока в повышающий преобразователь 10. Вместе с тем устройство В хранения энергии заряжается, принимая электрическую энергию, которая выводится от повышающего преобразователя 10 на линию PL1 положительной полярности и линию NL1 отрицательной полярности. При этом в качестве устройства В хранения энергии может использоваться конденсатор большой емкости. Конденсатор С1 сглаживает колебания напряжения между линией PL1 положительной полярности и линией NL1 отрицательной полярности.
На основе сигнала PWMC, поступающего от блока 50 управления двигателем, повышающий преобразователь 10 ступенчато увеличивает мощность постоянного тока, выводимую от устройства В хранения энергии, и выводит полученную в результате мощность на линию PL2 положительной полярности. Кроме того, на основе сигнала PWMC повышающий преобразователь 10 ступенчато уменьшает электрическую мощность, поступающую от каждого из инверторов 20 и 30, до уровня напряжения устройства В хранения энергии, чтобы зарядить устройство В хранения энергии. Повышающий преобразователь 10 выполнен, например, по схеме ступенчато повышающего/ступенчато понижающего прерывателя.
Конденсатор С2 сглаживает колебание напряжения между линией PL2 положительной полярности и линией NL2 отрицательной полярности. Инвертор 20 преобразует мощность постоянного тока, подводимую по линии PL2 положительной полярности и линии NL2 отрицательной полярности, в мощность переменного тока и выводит мощность переменного тока в мотор-генератор MG1, а инвертор 30 преобразует мощность постоянного тока, подводимую по линии PL2 положительной полярности и линии NL2 отрицательной полярности, в мощность переменного тока и выводит мощность переменного тока в мотор-генератор MG2. Кроме того, инвертор 20 преобразует мощность переменного тока, созданную мотор-генератором MG1, в мощность постоянного тока и выводит мощность постоянного тока как рекуперированную мощность на линию PL2 положительной полярности и на линию NL2 отрицательной полярности, а инвертор 30 преобразует мощность переменного тока, созданную мотор-генератором MG2, в мощность постоянного тока и выводит мощность постоянного тока как рекуперированную мощность на линию PL2 положительной полярности и на линию NL2 отрицательной полярности.
При этом, например, каждый из инверторов 20 и 30 состоит из мостовой схемы, включающей в себя переключающие элементы, соответствующие трем фазам. Тогда инвертор 20 выполняет операцию переключения в соответствии с сигналом PWMI1 от блока 50 управления двигателем, чтобы приводить в действие мотор-генератор MG1, а инвертор 30 выполняет операцию переключения в соответствии с сигналом PWMI2 от блока 50 управления двигателем, чтобы приводить в действие мотор-генератор MG2.
Когда устройство В хранения энергии заряжается при помощи внешнего источника 80 питания (например, сетевого источника питания), соединенного с ним посредством штепселя 40 зарядки, инвертор 20 преобразует мощность переменного тока, подводимую от внешнего источника 80 питания к нейтральной точке N1 через линию ACL1 электрической энергии, в мощность постоянного тока на основе сигнала PWMI1 от блока 50 управления двигателем и выводит преобразованную мощность постоянного тока на линию PL2 положительной полярности, а инвертор 30 преобразует мощность переменного тока, подводимую от внешнего источника 80 питания к нейтральной точке N2 через линию ACL2 электрической энергии, в мощность постоянного тока на основе сигнала PWMI2 от блока 50 управления двигателем и выводит преобразованную мощность постоянного тока на линию PL2 положительной полярности.
Каждый из мотор-генераторов MG1 и MG2 представляет собой трехфазный электродвигатель переменного тока, например трехфазный синхронный электродвигатель переменного тока, в роторе которого установлен постоянный магнит. Мотор-генератор MG1 создает трехфазную мощность переменного тока за счет использования механической энергии двигателя 4 и выводит созданную трехфазную мощность переменного тока в инвертор 20. Кроме того, мотор-генератор MG1 принимает трехфазную мощность переменного тока от инвертора 20, чтобы создать движущую силу, и запускает двигатель 4. Мотор-генератор MG2 принимает трехфазную мощность переменного тока от инвертора 30, чтобы создать крутящий момент транспортного средства. Кроме того, при рекуперативном торможении транспортного средства мотор-генератор MG2 создает трехфазную мощность переменного тока и выводит трехфазную мощность переменного тока в инвертор 30.
Блок 50 управления двигателем генерирует сигнал PWMC для приведения в действие повышающего преобразователя 10, сигнал PWMI1 для приведения в действие мотор-генератора MG1 и сигнал PWMI2 для приведения в действие мотор-генератора MG2 и выводит сигнал PWMC, сигнал PWMI1 и сигнал PWMI2 в повышающий преобразователь 10, инвертор 20 и инвертор 30 соответственно.
Кроме того, блок 50 управления двигателем управляет режимом пробега гибридного транспортного средства 100. А именно блок 50 управления двигателем управляет переключением между режимом пробега, в котором гибридное транспортное средство 100 движется за счет использования только мотор-генератора MG2 при остановленном двигателе 4 (EV-режим), и режимом пробега, в котором гибридное транспортное средство 100 движется при задействованном двигателе 4 (HV-режим). При этом HV-режим включает ситуацию, когда механическая энергия от двигателя 4 используется только для генерации электрической энергии мотор-генератором MG1.
Когда устройство В хранения энергии заряжается при помощи внешнего источника 80 питания, блок 50 управления двигателем генерирует сигналы PWMI1, PWMI2 для управления инверторами 20, 30, чтобы преобразовать мощность переменного тока, которая подведена от внешнего источника 80 энергии в нейтральные точки N1, N2 через штепсель 40 зарядки и линии ACL1, ACL2 электрической энергии, в мощность постоянного тока, и выводит мощность постоянного тока на линию PL2 положительной полярности.
Далее, блок 50 управления двигателем рассчитывает расстояние пробега с EV, показывающее совокупное расстояние пробега в EV-режиме, расстояние пробега с использованием двигателя, показывающее совокупное расстояние пробега в HV-режиме, то есть совокупное расстояние пробега в случае, когда задействован двигатель 4, и выводит расстояние пробега с EV и расстояние пробега с использованием двигателя в блок 60 памяти и блок 70 отображения способом, который будет описан позднее.
Блок 60 памяти представляет собой перезаписываемую энергонезависимую память и хранит расстояние пробега с EV и расстояние пробега с использованием двигателя, каждое из которых рассчитано блоком 50 управления двигателем. Блок 70 отображения позволяет пользователю увидеть расстояние пробега с EV и расстояние пробега с использованием двигателя, каждое из которых рассчитано блоком 50 управления двигателем независимо друг от друга.
На Фиг.2 показано изменение режима пробега гибридного транспортного средства 100, показанного на Фиг.1. Как видно из Фиг.2, предполагается, что гибридное транспортное средство 100 начинает двигаться после того, как устройство В хранения энергии полностью заряжено внешним источником 80 питания. Пока уровень зарядки (далее сокращенно УЗ) устройства В хранения энергии не упал ниже заранее определенного значения Sth, двигатель 4 остановлен, если только гибридное транспортное средство 100 резко не ускоряется или не движется по наклонному пути. То есть гибридное транспортное средство 100 движется в EV-режиме. В течение периода времени, когда гибридное транспортное средство 100 движется в EV-режиме, УЗ устройства В хранения энергии особым образом не регулируют. По мере увеличения расстояния пробега УЗ устройства В хранения энергии снижается.
Когда УЗ устройства В хранения энергии падает ниже значения Sth, запускается двигатель 4, и режим пробега переключается с EV-режима на HV-режим. В течение периода времени, когда гибридное транспортное средство 100 движется в HV-режиме, мотор-генератор MG1 генерирует электрическую энергию за счет использования механической энергии двигателя 4. Поэтому операцией зарядки/разрядки устройства В хранения энергии управляют таким образом, чтобы УЗ устройства В хранения энергии имел приблизительно значение Sth.
Хотя на чертеже это не показано, в период времени, когда гибридное транспортное средство 100 движется в EV-режиме, УЗ устройства В хранения энергии также может быть увеличен за счет рекуперированной мощности от мотор-генератора MG2 при рекуперативном торможении транспортного средства. В HV-режиме, кроме того, операцией зарядки/разрядки устройства В хранения энергии можно управлять таким образом, чтобы УЗ устройства В хранения энергии находился в заранее определенном диапазоне, в котором значение Sth задано как центральная точка управления.
Как описано выше, гибридное транспортное средство 100, способное заряжать устройство В хранения энергии за счет использования внешнего источника 80 питания, может начинать движение в EV-режиме в полностью заряженном состоянии. Следовательно, расстояние L пробега гибридного транспортного средства 100 в EV-режиме увеличивается по сравнению с гибридным транспортным средством, не обладающим возможностью внешней зарядки. Так как расстояние пробега гибридного транспортного средства 100 в EV-режиме увеличено, устройство В хранения энергии имеет емкость, позволяющую транспортному средству 100 пройти в полностью заряженном состоянии расстояние, по меньшей мере, 10 км в EV-режиме.
При этом если расстояние L пробега в EV-режиме увеличено, то происходит относительное уменьшение расстояния пробега в HV-режиме. В зависимости от состояния использования транспортного средства (например, ситуация, когда транспортное средство используется, главным образом, в небольшой области), возникает возможность минимального задействования двигателя 4. Следовательно, как и при применении обычной технологии, невозможно быстро определить только на основе совокупного расстояния пробега состояние использования двигателя 4 и компонентов, задействуемых в соответствии с приведением в действие двигателя 4. В Варианте 1 реализации настоящего изобретения как расстояние пробега транспортного средства вычисляются соответственно расстояние пробега с EV и расстояние пробега с использованием двигателя. Расстояние пробега с EV позволяет пользователю иметь информацию о пробеге в экономичном режиме, а расстояние пробега с использованием двигателя позволяет пользователю быстро определить состояние использования двигателя 4 и компонентов, относящихся к двигателю 4.
На Фиг.3 приведена функциональная схема блока 50 управления двигателем, показанного на Фиг.1. Как видно из Фиг.3, блок 50 управления двигателем включает в себя блок 110 управления преобразователем и инвертором, блок 120 управления зарядкой, блок 130 управления режимом пробега, первый блок 140 вычисления расстояния пробега и второй блок 150 вычисления расстояния пробега.
Блок 110 управления преобразователем и инвертором принимает от датчика (не показан) обнаруженные значения напряжения VB в устройстве В хранения энергии, напряжения VDC между линией PL2 положительной полярности и линией NL2 отрицательной полярности и частот вращения MRN1 и MRN2 мотор-генераторов MG1 и MG2. Кроме того, блок 110 управления преобразователем и инвертором принимает значения TR1 и TR2 команд по крутящему моменту мотор-генераторов MG1 и MG2 от блока 130 управления режимом пробега. После чего на основе соответственных сигналов блок 110 управления преобразователем и инвертором генерирует PWM-сигнал (Power Width Modulation - широтно-импульсная модуляция, ШИМ) для приведения в действие повышающего преобразователя 10 и выводит сгенерированный PWM-сигнал в виде сигнала PWMC в повышающий преобразователь 10.
Кроме того, блок 110 управления преобразователем и инвертором принимает от датчика (не показан) обнаруженные значения тока MCRT1 электромотора и угла θ1 вращения электромотора для мотор-генератора MG1. После чего на основе сигналов напряжения VDC, тока MCRT1 электромотора, угла θ1 вращения электромотора и значения TR1 команды по крутящему моменту блок 110 управления преобразователем и инвертором генерирует PWM-сигнал для приведения в действие мотор-генератора MG1 и выводит сгенерированный PWM-сигнал в виде сигнала PWMI1 в инвертор 20. Аналогичным образом блок 110 управления преобразователем и инвертором генерирует PWM-сигнал для приведения в действие мотор-генератора MG2 и выводит сгенерированный PWM-сигнал в виде сигнала PWMI2 в инвертор 30.
При этом если устройство В хранения энергии заряжается при помощи внешнего источника 80 питания, блок 110 управления преобразователем и инвертором генерирует сигналы PWMI1 и PWMI2 на основе команд AC1 и АС2 нуль-фазного напряжения, соответственно поступающих от блока 120 управления зарядкой, и выводит сигналы PWMI1 и PWMI2 в инверторы 20 и 30 соответственно.
Когда сигнал CHRG, представляющий собой команду на зарядку устройства В хранения энергии от внешнего источника 80 питания активируется, блок 120 управления зарядкой генерирует команды АС1 и АС2 нуль-фазного напряжения, чтобы сделать возможной работу мотор-генераторов MG1 и MG2 и инверторов 20 и 30 как однофазного PWM-преобразователя на основе напряжения VAC и тока IAC мощности переменного тока, поступающей от внешнего источника 80 питания в нейтральные точки N1 и N2, и подает команды АС1 и АС2 нуль-фазного напряжения в блок 110 управления преобразователем и инвертором. При этом сигнал CHRG активируется, например, если пользователь выдает команду на начало операции зарядки в состоянии, когда штепсель 40 зарядки соединен с внешним источником 80 питания.
Блок 130 управления режимом пробега принимает обнаруженные значения степени АСС нажатия на акселератор, скорости SPD транспортного средства и положения SP переключения от датчика (не показан), а также принимает расчетное значение УЗ устройства В хранения энергии от блока управления батареей (не показан). После чего на основе соответственных сигналов блок 130 управления режимом пробега определяет, задействован ли двигатель 4 в течение периода времени, когда гибридное транспортное средство 100 движется, то есть определяет, движется ли гибридное транспортное средство 100 в EV-режиме или HV-режиме при выполнении способа, который будет описан позднее. Исходя из результата этого определения блок 130 управления режимом пробега генерирует значения TR1 и TR2 команды по крутящему моменту и выводит значения TR1 и TR2 команды по крутящему моменту в блок 110 управления преобразователем и инвертором. При этом блок 130 управления режимом пробега выводит во второй блок 150 вычисления расстояния пробега требуемое значение EGPWR выводимой мощности двигателя, рассчитанное в ходе процесса вычисления.
Первый блок 140 вычисления расстояния пробега рассчитывает расстояние пробега с EV, показывающее совокупное расстояние пробега в EV-режиме. Более конкретно, первый блок 140 вычисления расстояния пробега интегрирует скорость SPD транспортного средства, поступившую от датчика скорости транспортного средства, чтобы рассчитать расстояние пробега за время, когда определено, что двигатель 4 не задействован. После чего первый блок 140 вычисления расстояния пробега выводит в качестве расстояния L1 пробега с EV рассчитанное расстояние пробега в блок 60 памяти и блок 70 отображения.
Второй блок 150 вычисления расстояния пробега рассчитывает расстояние L2 пробега с использованием двигателя, показывающее совокупное расстояние пробега, полученное при задействовании двигателя 4. При этом второй блок 150 вычисления расстояния пробега не просто рассчитывает расстояние пробега с использованием скорости SPD транспортного средства, обнаруженной датчиком скорости транспортного средства, но рассчитывает расстояние L2 пробега с использованием двигателя с учетом нагрузки на двигатель 4. Более конкретно, второй блок 150 вычисления расстояния пробега определяет предполагаемую скорость транспортного средства в соответствии с нагрузкой на двигатель 4 на основе требуемого значения EGPWR выходной мощности двигателя, поступившего от блока 130 управления режимом пробега, используя таблицу соответствия скорости транспортного средства, которая будет описана позднее, и интегрирует предполагаемую скорость транспортного средства, чтобы рассчитать расстояние L2 пробега с использованием двигателя. После чего второй блок 150 вычисления расстояния пробега выводит расстояние L2 пробега с использованием двигателя в блок 60 памяти и блок 70 отображения. При этом если на основе требуемого значения EGPWR выходной мощности двигателя определено, что двигатель 4 не задействован под нагрузкой, то второй блок 150 вычисления расстояния пробега рассчитывает расстояние L2 пробега с использованием двигателя, используя скорость SPD транспортного средства, поступившую от датчика скорости транспортного средства.
На Фиг.4 приведена блок-схема, относящаяся к процессу вычисления расстояния пробега, выполняемому блоком 50 управления двигателем, показанным на Фиг.1. При этом процесс, представленный этой блок-схемой, выполняют, вызывая его из основной программы через заранее определенный период времени или каждый раз, когда выполняется заранее определенное условие.
Как видно из Фиг.4, блок 50 управления двигателем определяет, задействован ли двигатель 4 (этап S10). Например, блок 50 управления двигателем может определить, задействован ли двигатель 4, исходя из того, происходит ли в двигателе 4 управление сгоранием или управление впрыском. В конструкции гибридного транспортного средства 100, так как в EV-режиме двигатель 4 не вращается одновременно с вращением оси (двигатель 4 остановлен за счет его инерции, а мотор-генератор MG1 вращается одновременно с вращением оси), блок 50 управления двигателем может определить, задействован ли двигатель 4, исходя из того, вращается ли этот двигатель.
Если определено, что двигатель 4 не задействован ("Нет" на этапе S10), блок 50 управления двигателем выполняет процесс расчета расстояния пробега с EV, чтобы рассчитать расстояние L1 пробега с EV (этап S20). С другой стороны, если на этапе S10 определено, что двигатель 4 задействован ("Да" на этапе S10), блок 50 управления двигателем выполняет процесс расчета расстояния пробега с использованием двигателя, чтобы рассчитать расстояние L2 пробега с использованием двигателя (этап S30). Отметим, что процесс расчета расстояния пробега с EV и процесс расчета расстояния пробега с использованием двигателя будут описаны позднее.
После чего блок 50 выводит расстояние L1 пробега с EV, рассчитанное на этапе S20, и расстояние L2 пробега с использованием двигателя, рассчитанное на этапе S30, в блок 60 памяти и блок 70 отображения (этап S40).
На Фиг.5 приведена блок-схема процесса расчета расстояния пробега с EV, показанного на Фиг.4. Как видно из Фиг.5, блок 50 управления двигателем считывает расстояние L1 пробега с EV из блока 60 памяти (этап S110). Затем блок 50 управления двигателем получает обнаруженное значение скорости SPD транспортного средства от датчика скорости транспортного средства (этап S120). После чего на основе обнаруженного значения скорости SPD транспортного средства блок 50 управления двигателем рассчитывает расстояние L1 пробега с EV (этап S130). Если говорить конкретно, блок 50 управления двигателем добавляет интегрированное значение скорости SPD транспортного средства к расстоянию L1 пробега с EV, чтобы рассчитать расстояние L1 пробега с EV.
На Фиг.6 приведена блок-схема процесса расчета расстояния пробега с использованием двигателя, показанного на Фиг.4. Как видно из Фиг.6, блок 50 управления двигателем считывает значение расстояния L2 пробега с использованием двигателя из блока 60 памяти (этап S210). Затем блок 50 управления двигателем определяет, задействован ли двигатель 4 под нагрузкой (этап S220). Например, блок 50 управления двигателем может определить, задействован ли двигатель 4 под нагрузкой, исходя из того, равно ли нулю требуемое значение EGPWR выходной мощности двигателя.
Если определено, что двигатель 4 задействован под нагрузкой ("Да" на этапе S220), блок 50 управления двигателем на основе требуемого значения EGPWR выходной мощности двигателя рассчитывает предполагаемую скорость транспортного средства, используя полученную заранее таблицу соответствия скорости транспортного средства (этап S230).
На Фиг.7 приведена таблица соответствия скорости транспортного средства. Как видно из Фиг.7, соответствующее значение скорости транспортного средства определено для каждого требуемого значения выходной мощности двигателя, показывающего нагрузку двигателя 4, и предполагаемую скорость транспортного средства получают в зависимости от требуемого значения EGPWR выходной мощности двигателя. Эта предполагаемая скорость транспортного средства обеспечена для определения адекватным образом состояния использования двигателя 4. В гибридном транспортном средстве 100 выходная мощность двигателя 4 частично или полностью используется для генерирования электрической энергии мотор-генератором MG1. Следовательно, даже если скорость SPD транспортного средства, поступившая от датчика скорости транспортного средства, интегрируется в течение периода времени, когда двигатель 4 задействован, состояние использования двигателя 4 адекватным образом не отражается на расстоянии L2 пробега с использованием двигателя (например, двигатель 4 иногда задействуется для генерирования электрической энергии в течение периода времени, когда гибридное транспортное средство 100 остановлено). Чтобы устранить этот недостаток, расстояние L2 пробега с использованием двигателя рассчитывается из предполагаемой скорости транспортного средства, определенной в зависимости от нагрузки двигателя 4, в результате чего состояние использования двигателя 4 может быть представлено пользователю адекватным образом.
При вычислении таблицы соответствия скорости транспортного средства взаимосвязь между скоростью транспортного средства и мощностью, требуемой для достижения этой скорости транспортного средства, получают, например, на основе модели сопротивления движению. При этом сопротивление движению изменяется в зависимости от веса транспортного средства (включая вес пассажиров) и уклона дороги. Поэтому на основе веса, включая вес пассажиров, и уклона дороги таблица соответствия скорости транспортного средства может быть скорректирована.
Если снова обратиться к Фиг.6, если на этапе S220 определено, что двигатель 4 не задействован под нагрузкой ("Нет" на этапе S220), блок 50 управления двигателем получает измеренное значение скорости SPD транспортного средства от датчика скорости транспортного средства (этап S240). В ситуации, когда двигатель 4 задействован при том, что требуемое значение EGPWR выходной мощности двигателя равно нулю, то есть в состоянии работы вхолостую или в экономичном состоянии, вместо предполагаемой скорости транспортного средства, соответствующей нагрузке на двигатель, используется обнаруженное значение скорости SPD транспортного средства.
Если двигатель 4 задействован под нагрузкой, чтобы рассчитать расстояние L2 пробега с использованием двигателя, блок 50 управления двигателем интегрирует предполагаемую скорость транспортного средства, соответствующую нагрузке двигателя 4. С другой стороны, если двигатель 4 задействован без нагрузки, чтобы рассчитать расстояние L2 пробега с использованием двигателя, блок 50 управления двигателем интегрирует скорость SPD транспортного средства, полученную от датчика скорости транспортного средства (этап S250).
На Фиг.8 показан один из примеров состояния отображения блоком 70 отображения, показанным на Фиг.1. Как видно из Фиг.8, блок 70 отображения отображает расстояние L1 пробега с EV в области 72, а также отображает расстояние L2 пробега с использованием двигателя в области 74. То есть блок 70 отображения отображает совокупное расстояние пробега в EV-режиме и совокупное расстояние пробега в HV-режиме, а именно совокупное расстояние пробега в ситуации, когда двигатель 4 задействован, независимо друг от друга. При этом блок 70 отображения может избирательно отображать или расстояние пробега L1 в EV-режиме, или расстояние L2 пробега с использованием двигателя по требованию пользователя. В качестве альтернативы, в дополнение к расстоянию L1 пробега в EV-режиме и расстоянию L2 пробега с использованием двигателя блок 70 отображения может отображать совокупное расстояние пробега транспортного средства.
Расстояние пробега L1 в EV-режиме и расстояние L2 пробега с использованием двигателя рассчитываются и отображаются описанным выше образом, в результате чего пользователь может увидеть совокупное расстояние пробега в каждом режиме пробега, а также может адекватным образом оценить состояние использования двигателя 4 и компонентов, относящихся к двигателю 4, на основе расстояния L2 пробега с использованием двигателя.
На Фиг.9 приведена блок-схема, иллюстрирующая структуру управления в блоке 130 управления режимом пробега, показанном на Фиг.3. Отметим, что процесс, представленный этой блок-схемой, также выполняют, вызывая его из основной программы через каждый заранее определенный период времени или каждый раз, когда выполняется заранее определенное условие.
Как видно из Фиг.9, блок 130 управления режимом пробега рассчитывает крутящий момент (на валу), требуемый для приведения в движение транспортного средства, используя заранее установленную карту или арифметическое уравнение и исходя из степени нажатия на акселератор, скорости транспортного средства и положения переключения (этап S310). Затем блок 130 управления режимом пробега рассчитывает выходную мощность, требуемую для приведения в движение транспортного средства, исходя из рассчитанного требуемого для приведения в движение крутящего момента и скорости вращения вала (этап S320). Если говорить конкретно, чтобы рассчитать требуемую для приведения в движение выходную мощность, блок 130 управления режимом пробега умножает требуемый для приведения в движение крутящий момент на скорость вращения вала.
Затем блок 130 управления режимом пробега рассчитывает требуемое значение EGPWR выходной мощности двигателя исходя из рассчитанной требуемой для приведения в движение выходной мощности и УЗ устройства В хранения энергии (этап S330). Если говорить конкретно, чтобы рассчитать требуемое значение EGPWR выходной мощности двигателя, блок 130 управления режимом пробега на основе УЗ устройства В хранения заряда рассчитывает требуемую величину зарядки устройства В хранения заряда и добавляет требуемую величину зарядки к требуемой для приведения в движение выходной мощности. Затем блок 130 управления режимом пробега определяет, превышает ли требуемое значение EGPWR выходной мощности двигателя заранее определенное пороговое значение (этап S340). Это пороговое значение используется для определения того, должен ли быть задействован двигатель 4. Другими словами, это пороговое значение представляет собой пороговое значение для переключения режима пробега.
Если на этапе S340 определено, что требуемое значение EGPWR выходной мощности двигателя меньше порогового значения или равно ему ("Нет" на этапе S340), выполнение процесса продолжается с этапа S370. С другой стороны, если на этапе S340 определено, что требуемое значение EGPWR выходной мощности двигателя больше порогового значения ("Да" на этапе S340), то блок 130 управления режимом пробега рассчитывает целевую скорость вращения двигателя 4 и осуществляет управление двигателем 4 (этап S350). Затем блок 130 управления режимом пробега рассчитывает целевую скорость вращения мотор-генератора MG1, чтобы поддержать скорость вращения двигателя при целевой скорости вращения, а также рассчитывает значение TR1 команды по крутящему моменту для задания скорости вращения мотор-генератора MG1 при целевой скорости вращения (этап S360).
Затем блок 130 управления режимом пробега рассчитывает создаваемый крутящий момент двигателя 4 (прямой крутящий момент двигателя) на основе значения TR1 команды по крутящему моменту для мотор-генератора MG1 (этап S370). При этом прямой крутящий момент двигателя может быть рассчитан на основе значения TR1 команды по крутящему моменту исходя из геометрической конфигурации (передаточного числа) механизма 3 разделения механической энергии. Если требуемое значение EGPWR выходной мощности двигателя меньше порогового значения или равно ему, двигатель 4 останавливается; таким образом, прямой крутящий момент двигателя становится равным нулю. Затем, когда рассчитан прямой крутящий момент двигателя, блок 130 управления режимом пробега вычитает прямой крутящий момент из требуемого для приведения в движение крутящего момента, рассчитанного на этапе S310, чтобы рассчитать значение TR2 команды по крутящему моменту для мотор-генератора MG2 (этап S380).
Далее будет описана работа инверторов 20 и 30 в то время, когда устройство В хранения энергии заряжается при помощи внешнего источника 80 питания.
На Фиг.10 показана эквивалентная нуль-фазная схема инверторов 20, 30 и мотор-генераторов MG1, MG2, показанных на Фиг.1. В упомянутых инверторах 20 и 30, каждый из которых состоит из трехфазной мостовой схемы, имеется по восемь конфигураций в виде комбинаций состояния ON (включен) и состояния OFF (выключен) шести переключающих элементов. Две из восьми конфигураций переключения имеют нулевое межфазное напряжение, и такое состояние напряжения называется нулевым вектором напряжения. Что касается нулевого вектора напряжения, то можно считать, что три переключающих элемента верхнего плеча находятся в одном состоянии переключения (все переключающие элементы включены или выключены). Кроме того, можно также считать, что три переключающих элемента нижнего плеча находятся в одном состоянии переключения. Соответственно, на Фиг.10 три переключающих элемента верхнего плеча инвертора 20 вместе показаны как верхнее плечо 20А, а три переключающих элемента нижнего плеча инвертора 20 вместе показаны как нижнее плечо 20В. Аналогичным образом, три переключающих элемента верхнего плеча инвертора 30 вместе показаны как верхнее плечо 30А, а три переключающих элемента нижнего плеча инвертора 30 вместе показаны как нижнее плечо 30В.
Как показано на Фиг.10, эту эквивалентную нуль-фазную схему можно считать однофазным PWM-преобразователем, который принимает однофазную мощность переменного тока, подводимую к каждой из нейтральных точек N1 и N2 по линиям ACL1 и ACL2 электрической энергии. В результате нулевой вектор напряжения в каждом из инверторов 20 и 30 изменяется, и операцией переключения управляют таким образом, чтобы инверторы 20 и 30 работали как плечи однофазного PWM-преобразователя. Таким образом, мощность переменного тока, поступающая по каждой из линий ACL1 и ACL2 подачи электрической энергии, преобразуется в мощность постоянного тока, и мощность постоянного тока выводится на линию PL2 положительной полярности.
В гибридном транспортном средстве 100, соответствующем Варианту 1 реализации настоящего изобретения, которое описано выше, устройство В хранения энергии можно заряжать при помощи внешнего источника 80 питания с целью увеличения области пробега в EV-режиме. В гибридном транспортном средстве, обладающем возможностью внешней зарядки, если частота задействования двигателя 4 невелика, то состояние использования двигателя 4 нельзя точно определить на основе совокупного расстояния пробега и совокупного времени использования транспортного средства. Однако согласно Варианту 1 реализации настоящего изобретения для пользователя рассчитывается и отображается расстояние L2 пробега с использованием двигателя. Таким образом, согласно Варианту 1 реализации настоящего изобретения можно предоставить пользователю данные по состоянию использования двигателя 4 и компонентов, относящихся к двигателю 4.
Кроме того, блок 70 отображения отображает расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя. Следовательно, согласно Варианту 1 реализации настоящего изобретения можно предоставить пользователю совокупное расстояние пробега для каждого режима пробега.
Далее, в Варианте 1 реализации настоящего изобретения расстояние L2 пробега с использованием двигателя рассчитывают исходя из предполагаемой скорости транспортного средства, соответствующей нагрузке двигателя 4. Таким образом, согласно Варианту 1 реализации настоящего изобретения пользователю можно предоставить данные по состоянию использования двигателя 4 с учетом нагрузки.
Более того, в Варианте 1 реализации настоящего изобретения энергию зарядки от штепселя 40 зарядки подают в нейтральные точки N1 и N2 мотор-генераторов MG1 и MG2, и эта энергия поступает в мотор-генераторы MG1 и MG2 через инверторы 20 и 30. Таким образом, согласно Варианту 1 реализации настоящего изобретения нет необходимости дополнительно устанавливать инвертор специально для электрической зарядки.
В приведенном выше описании расстояние L1 пробега с EV рассчитывают таким образом, что скорость SPD транспортного средства, поступившая от датчика скорости транспортного средства, интегрируется за то время, когда определено, что двигатель 4 не задействован. В качестве альтернативы расстояние L1 пробега с EV может представлять собой значение, полученное путем вычитания расстояния L2 пробега с использованием двигателя из совокупного расстояния пробега транспортного средства, который рассчитывают путем интегрирования скорости SPD транспортного средства, поступившей от датчика скорости транспортного средства, вне зависимости от того, задействован или нет двигатель 4. Кроме того, расстояние L2 пробега с использованием двигателя может представлять собой значение, полученное путем вычитания из совокупного расстояния пробега транспортного средства рассчитанного расстояния L1 пробега с EV, который путем интегрирования скорости SPD транспортного средства, поступившей от датчика скорости транспортного средства, за то время, когда определено, что двигатель 4 не задействован. То есть два из трех расстояний, а именно совокупного расстояния пробега транспортного средства, расстояния L1 пробега с EV и расстояния L2 пробега с использованием двигателя, могут быть рассчитаны путем упомянутого интегрирования, в то время как оставшееся расстояние может быть вычислено на основе двух рассчитанных расстояний.
Вариант 2
Обычно время обслуживания каждого элемента, входящего в состав транспортного средства, определяют исходя из совокупного расстояния пробега транспортного средства. В противоположность этому в Варианте 2 реализации настоящего изобретения время обслуживания двигателя 4 и элементов, задействуемых при работе двигателя 4, определяют исходя из расстояния L2 пробега с использованием двигателя.
Гибридное транспортное средство 100А, соответствующее Варианту 2 реализации настоящего изобретения, по общей конструкции идентично гибридному транспортному средству 100, показанному на Фиг.1.
На Фиг.11 показана функциональная схема блока 50А управления двигателем согласно Варианту 2 реализации настоящего изобретения. Как видно из Фиг.11, блок 50А управления двигателем в дополнение к конфигурации блока 50 управления двигателем, показанного на Фиг.3, дополнительно включает в себя блок 160 определения.
Блок 160 определения принимает расстояние L1 пробега с EV от первого блока 140 вычисления расстояния пробега, а также принимает расстояние L2 пробега с использованием двигателя от второго блока 150 вычисления расстояния пробега. Затем на основе совокупного расстояния L3 пробега транспортного средства, который получают путем добавления расстояния L2 пробега с использованием двигателя к расстоянию L1 пробега с EV, а также расстояния L2 пробега с использованием двигателя, когда блок 160 определяет необходимость обслуживания для заранее определенных элементов, входящих в состав транспортного средства. Кроме того, блок 160 определения генерирует сигнал ARM для выдачи пользователю уведомления об элементе, требующем обслуживания. В данном случае примеры элемента транспортного средства включают в себя компоненты, из которых создано транспортное средство, и необходимые принадлежности, обеспечивающие работу транспортного средства, такие как моторное масло и охлаждающая жидкость для двигателя. При этом совокупное расстояние L3 пробега транспортного средства может быть рассчитано независимо с использованием скорости SPD транспортного средства, поступившей от датчика скорости транспортного средства.
В данном случае блок 160 определения может выводить сигнал ARM в блок 70 отображения. После чего на основе сигнала ARM блок 70 отображения позволяет пользователю визуально опознавать элемент, требующий обслуживания.
На Фиг.12 приведена блок-схема, относящаяся к процессу определения времени обслуживания, выполняемому блоком 50А управления двигателем, согласно Варианту 2 реализации настоящего изобретения. Как видно из Фиг.12, в дополнение к этапам блок-схемы, показанной на Фиг.4, данная блок-схема, кроме того, включает в себя этапы S50 и S60. А именно после выполнения процесса на этапе S40 блок 50А управления двигателем определяет необходимость обслуживания для каждого заранее определенного элемента, входящего в состав транспортного средства, на основе совокупного расстояния L3 пробега транспортного средства или расстояния L2 пробега с использованием двигателя (этап S50).
Если говорить более конкретно, в целях установления времени обслуживания расстояние пробега задают для каждого заранее определенного элемента. Более того, для определения необходимости обслуживания для каждого элемента устанавливают совокупное расстояние пробега L3 или расстояние L2 пробега с использованием двигателя.
Например, в соответствии с расстоянием пробега устанавливают сроки замены соответственных элементов, таких как стеклоочиститель, моторное масло, масляный фильтр и охлаждающая жидкость для двигателя, а также сроки перестановки шин. Блок 50А управления двигателем определяет срок замены стеклоочистителя и срок перестановки шин, каждый из которых не имеет отношения к приведению в действие двигателя 4 исходя из совокупного расстояния L3 пробега. С другой стороны, блок 50А управления двигателем определяет сроки замены элементов, задействуемых в соответствии с приведением в действие двигателя 4, таких как моторное масло, масляный фильтр и охлаждающая жидкость для двигателя, исходя из расстояния L2 пробега с использованием двигателя.
Когда блок 50А управления двигателем определяет необходимость обслуживания для каждого элемента на этапе S50, этот блок генерирует сигнал ARM для выдачи пользователю уведомления об элементе, требующем обслуживания (этап S60).
Хотя на чертеже это не показано, пользователь может задавать элемент, для которого требуется уведомление о сроке обслуживания. Далее, для определения необходимости обслуживания пользователь может задавать срок обслуживания (расстояние пробега) и одно из следующего: совокупное расстояние L3 пробега и расстояние L2 пробега с использованием двигателя для каждого элемента, указанного пользователем.
Как описано выше, в Варианте 2 реализации настоящего изобретения необходимость обслуживания двигателя 4 и элементов, задействуемых в соответствии с приведением в действие двигателя 4, определяют на основе расстояния L2 пробега с использованием двигателя. Таким образом, согласно Варианту 2 реализации настоящего изобретения пользователь может принимать уведомление о необходимости обслуживания для каждого элемента на основе реального состояния использования.
Вариант 3
В Варианте 1 реализации настоящего изобретения для транспортного средства рассчитывают расстояние пробега L1 с EV и расстояние L2 пробега с использованием двигателя. В противоположность этому в Варианте 3 реализации настоящего изобретения рассчитывают совокупное время пробега в EV-режиме и совокупное время пробега в HV-режиме (т.е. совокупное время задействования двигателя 4). На основе совокупного времени пробега в HV-режиме пользователь также может быстро определить состояние использования двигателя 4 и компонентов, относящихся к двигателю 4.
Гибридное транспортное средство 100 В, соответствующее Варианту 3 реализации настоящего изобретения, по общей конструкции идентично гибридному транспортному средству 100, показанному на Фиг.1.
На Фиг.13 показана функциональная схема блока 50В управления двигателем согласно Варианту 3 реализации настоящего изобретения. Как видно из Фиг.13, блок 50В управления двигателем включает в себя первый блок 170 вычисления времени пробега и второй блок 180 вычисления времени пробега вместо первого блока 140 вычисления расстояния пробега и второго блока 150 вычисления расстояния пробега в конфигурации блока 50 управления двигателем, показанного на Фиг.3.
Первый блок 170 вычисления времени пробега рассчитывает время T1 пробега с EV, показывающее совокупное временя пробега в EV-режиме. Если говорить конкретно, первый блок 170 вычисления времени пробега интегрирует время, в течение которого определено, что двигатель 4 не задействован, за период задействования системы транспортного средства. Затем первый блок 170 вычисления времени пробега выводит интегрированное время как время Т1 пробега с EV в блок 60 памяти и блок 70 отображения. Задействована или нет система транспортного средства, в данном случае определяется на основе сигнала IG, показывающего состояние задействования системы транспортного средства.
Второй блок 180 вычисления времени пробега рассчитывает время T2 пробега с HV, показывающее совокупное время пробега в HV-режиме. Если говорить конкретно, второй блок 180 вычисления времени пробега интегрирует время, в течение которого определено, что двигатель 4 задействован, за период задействования системы транспортного средства. Затем второй блок 180 вычисления времени пробега выводит интегрированное время как время Т2 пробега с HV в блок 60 памяти и блок 70 отображения.
На Фиг.14 приведена блок-схема, относящаяся к процессу вычисления времени пробега, выполняемому блоком 50В управления двигателем, согласно Варианту 3 реализации настоящего изобретения. При этом процесс, представленный этой блок-схемой, также выполняют, вызывая его из основной программы через каждый заранее определенный период времени или каждый раз, когда выполняется заранее определенное условие.
Как видно из Фиг.14, на основе сигнала IG блок 50В управления двигателем определяет, задействована ли система транспортного средства (этап S410). Если определено, что система транспортного средства задействована ("Да" на этапе S410), блок 50В управления двигателем определяет, задействован ли двигатель 4 (этап S420).
Если определено, что двигатель 4 не задействован ("Нет" на этапе S420), блок 50В управления двигателем считывает время Т1 пробега с EV из блока 60 памяти (этап S430) и интегрирует время Т1 пробега с EV (этап S440).
С другой стороны, если на этапе S420 определено, что двигатель 4 задействован ("Да" на этапе S420), блок 50В управления двигателем считывает время Т2 пробега с HV из блока 60 памяти (этап S450) и интегрирует время Т2 пробега с HV (этап S460).
Затем блок 50В управления двигателем выводит время Т1 пробега с EV, рассчитанное на этапе S440, и время Т2 пробега с HV, рассчитанное на этапе S460, в блок 60 памяти и блок 70 отображения (этап 470).
Как описано выше, в Варианте 3 реализации настоящего изобретения рассчитывается время Т2 пробега с HV, показывающее время фактического задействования двигателя 4, и пользователь может увидеть это время Т2 пробега с HV. Таким образом, согласно Варианту 3 реализации настоящего изобретения можно предоставить пользователю данные по состояниям использования двигателя 4 и компонентов, относящихся к двигателю 4.
Кроме того, время Т1 пробега с EV и время Т2 пробега с HV отображаются блоком 70 отображения. Следовательно, согласно Варианту 3 реализации настоящего изобретения пользователю можно предоставить совокупное время пробега для каждого режима пробега.
В приведенном выше описании время Т1 пробега с EV и время Т2 пробега с HV интегрируют в соответствии с тем, задействован или нет двигатель 4. В качестве альтернативы, время Т2 пробега с HV может представлять собой значение, полученное путем вычитания времени Т1 пробега с EV из совокупного времени пробега транспортного средства, рассчитанного путем интегрирования времени, в течение которого задействована система транспортного средства вне зависимости от того, задействован или нет двигатель 4. Вместе с тем, время Т1 пробега с EV может представлять собой значение, полученное путем вычитания времени Т2 пробега с HV из совокупного времени пробега транспортного средства. Другими словами, две из трех величин времени, а именно совокупного времени пробега транспортного средства, времени Т1 пробега с EV и времени Т2 пробега с HV могут быть рассчитаны путем независимого интегрирования времени, в то время как оставшаяся величина может быть вычислена на основе рассчитанных двух величин времени пробега.
Вариант 4
В варианте 4 реализации настоящего изобретения, когда устройство В хранения энергии заряжается при помощи внешнего источника 80 питания, расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя, каждый из которых хранится в блоке 60 памяти, передаются через штепсель 40 зарядки во внешнее устройство по линии электрической энергии.
На Фиг.15 показана конфигурация силовой цепи гибридного транспортного средства согласно Варианту 4 реализации настоящего изобретения. Как видно из Фиг.15, гибридное транспортное средство 100С по сравнению с конструкцией гибридного транспортного средства 100, показанного на Фиг.1, дополнительно включает в себя блок 75 передачи, а также включает в себя блок 50С управления двигателем вместо блока 50 управления двигателем в конструкции гибридного транспортного средства 100, показанного на Фиг.1.
Блок 75 передачи соединен с линиями ACL1 и ACL2 электрической энергии. Блок 75 передачи представляет собой передатчик, выполненный с возможностью устанавливать связь по линии электрической энергии, например модем. Кроме того, на основе команды, поступившей от блока 50С управления двигателем, блок 75 передачи считывает расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя из блока 60 памяти и передает считанные данные во внешнее устройство по линиям ACL1 и ACL2 электрической энергии и через штепсель 40 зарядки. При этом блок 75 передачи передает расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя, например, на сервер, который размещен у дилера, и позволяет устанавливать связь с использованием линии электрической энергии.
Когда устройство В хранения энергии заряжается внешним источником 80 питания, блок 50С считывает расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя из блока 60 памяти и выводит в блок 75 передачи команду на передачу данных во внешнее устройство. При этом оставшиеся функции блока 50С управления двигателем идентичны функциям блока 50 управления двигателем, соответствующего Варианту 1 реализации настоящего изобретения.
На Фиг.16 приведена блок-схема, относящаяся к процессу передачи, выполняемому блоком 50С управления двигателем, показанным на Фиг.15. Как видно из Фиг.16, на основе сигнала CHRG блок 50С управления двигателем определяет, заряжается ли устройство В хранения энергии при помощи внешнего источника 80 питания (этап S510). Если определено, что устройство В хранения энергии заряжается при помощи внешнего источника 80 питания ("Да" на этапе S510), блок 50С управления двигателем извлекает расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя из блока 60 памяти (этап S520).
Затем блок 50С управления двигателем передает расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя через штепсель 40 зарядки во внешнее устройство по линиям ACL1 и ACL2 электрической энергии (этап S530).
Как описано выше, согласно Варианту 3 реализации настоящего изобретения расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя передаются во внешнее устройство. Таким образом, когда расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя передаются, например, на сервер, который размещен у дилера и позволяет устанавливать связь, используя линию подачи электрической энергии, дилер может контролировать срок обслуживания соответствующего транспортного средства.
Вместе с тем, согласно Варианту 3 реализации настоящего изобретения, расстояние L1 пробега с EV и расстояние L2 пробега с использованием двигателя передаются во внешнее устройство по линии электрической энергии в то время, когда устройство В хранения заряда заряжается при помощи внешнего устройства 80 питания. Следовательно, не возникает необходимости в наличии обычно являющегося дорогим радиопередатчика.
Хотя на чертеже это не показано, блок 75 передачи может быть предусмотрен и в гибридном транспортном средстве, соответствующем Варианту 2 реализации настоящего изобретения. При этом блок 75 передачи может передавать время Т1 пробега с EV и время Т2 пробега с HV во внешнее устройство в то время, когда устройство В хранения энергии заряжается при помощи внешнего источника 80 питания.
В соответственных вариантах реализации настоящего изобретения, которые описаны выше, когда устройство В хранения энергии заряжается при помощи внешнего источника 80 питания, электрическая энергия зарядки поступает в нейтральные точки N1 и N2 мотор-генераторов MG1 и MG2. В качестве альтернативы отдельно может быть предусмотрен специальный заряжающий инвертор.
На Фиг.17 показана конфигурация силовой цепи гибридного транспортного средства, которое дополнительно включает в себя заряжающий инвертор 90. Как видно из Фиг.17, гибридное транспортное средство 100D по сравнению с конструкцией гибридного транспортного средства 100, показанного на Фиг.1, дополнительно включает в себя заряжающий инвертор 90.
Заряжающий инвертор 90 соединен с линией PL2 положительной полярности и линией NL2 отрицательной полярности, принимает мощность переменного тока от внешнего источника 80 энергии через штепсель 40 зарядки, преобразует мощность переменного тока в мощность постоянного тока и выводит мощность постоянного тока на линию PL2 положительной полярности и линию NL2 отрицательной полярности.
После чего повышающий преобразователь 10 преобразует мощность постоянного тока, поступающую от заряжающего инвертора 90 по линии PL2 положительной полярности и линии NL2 отрицательной полярности, до получения уровня напряжения, необходимого для устройства В хранения энергии, в результате чего можно заряжать это устройство В.
При этом гибридное транспортное средство 100D по конструкции идентично гибридному транспортному средству 100 за исключением указанного выше. Отметим, что блок 50 управления двигателем, блок 60 памяти и блок 70 отображения на Фиг.17 не показаны.
В соответственных вариантах реализации настоящего изобретения, которые описаны выше, гибридное транспортное средство имеет такую конструкцию, что устройство В хранения энергии можно заряжать при помощи внешнего источника 80 питания. Однако диапазон применимости настоящего изобретения не ограничивается гибридным транспортным средством, обладающим подобной возможностью внешней зарядки. Если гибридное транспортное средство имеет возможность внешней зарядки, то, как описано выше, увеличивается расстояние пробега в EV-режиме и уменьшается частота задействования двигателя. Таким образом, настоящее изобретение особенно применимо для гибридного транспортного средства, для которого возможно существенное различие между совокупным расстоянием пробега и расстоянием пробега с использованием двигателя и которое также имеет возможность внешней зарядки.
В приведенном выше описании рассмотрено гибридное транспортное средство последовательного/параллельного типа, в котором механизм 3 разделения механической энергии делит механическую энергию двигателя 4 на две части и передает разделенную энергию соответственно на ось и в мотор-генератор MG1. Настоящее изобретение также применимо к так называемому гибридному транспортному средству последовательного типа, в котором только двигатель 4 используют для приведения в действие мотора-генератора MG1 и только мотор-генератор MG2 создает силу для приведения в движение транспортного средства, либо к гибридному транспортному средству с вспомогательным мотором, в котором двигатель генерирует основную механическую энергию, а мотор помогает двигателю, если это необходимо.
В случае гибридного транспортного средства последовательного типа это транспортное средство начинает двигаться в EV-режиме, когда двигатель остановлен, а устройство хранения энергии находится в полностью заряженном состоянии. Когда УЗ устройства хранения энергии падает ниже заранее определенного порогового значения, двигатель начинает приводить в действие генератор. После чего гибридное транспортное средство движется в EV-режиме при одновременной генерации двигателем электрической энергии.
Настоящее изобретение также применимо к гибридному транспортному средству, не включающему повышающий преобразователь 10.
В соответственных вариантах реализации настоящего изобретения, которые описаны выше, управление, выполняемое блоком управления двигателем, в действительности выполняется центральным процессором (CPU, Central Processing Unit). Центральный процессор считывает из ПЗУ (Постоянное запоминающее устройство) программу, содержащую соответствующие этапы блок-схемы, выполняет считанную программу, то есть выполняет процессы, представленные в упомянутой блок-схеме. Соответственно, ПЗУ - это машиночитаемый (центральным процессором) носитель записи, хранящий программу, которая содержит соответствующие этапы блок-схемы.
В приведенном выше описании двигатель 4 представляет собой "двигатель внутреннего сгорания", соответствующий настоящему изобретению, а мотор-генератор MG2 представляет собой "вращающуюся электрическую машину", соответствующую настоящему изобретению. Кроме того, первый блок 140 вычисления расстояния пробега и первый блок 170 вычисления времени пробега представляют собой "первый блок вычисления показателя пробега", соответствующий настоящему изобретению, а второй блок 150 вычисления расстояния пробега и второй блок 180 вычисления времени пробега представляют собой "второй блок вычисления показателя пробега", соответствующий настоящему изобретению. Далее, мотор-генератор MG1 и инвертор 20 образуют "устройство генерации электрической энергии", соответствующее настоящему изобретению, а мотор-генератор MG1, мотор-генератор MG2, инвертор 20 и инвертор 30 образуют "устройство зарядки электрической энергией", соответствующее настоящему изобретению.
Далее, штепсель 40 зарядки представляет собой "штепсель", соответствующий настоящему изобретению, а мотор-генератор MG1 представляет собой "другую вращающуюся электрическую машину", соответствующую настоящему изобретению. Кроме того, инвертор 20 и инвертор 30 соответствуют "второму инвертору" и "первому инвертору" согласно настоящему изобретению, а линии ACL1 и ACL2 электрической энергии соответствуют "паре линий электрической энергии" согласно настоящему изобретению.
Необходимо воспринимать все рассмотренные здесь варианты реализации настоящего изобретения как всего лишь иллюстративные и не накладывающие ограничений. Таким образом понятно, что объем настоящего изобретения определен пунктами приложенной формулы изобретения, а не приведенным выше описанием вариантов его реализации, и что все изменения, не выходящие за пределы пунктов приложенной формулы изобретения либо эквивалентные этим пределам, считаются охваченными упомянутыми пунктами.
Реферат
Группа изобретений относится к гибридному транспортному средству. Гибридное транспортное средство содержит первый блок вычисления показателя пробега, второй блок вычисления показателя пробега, блок определения необходимости обслуживания элементов транспортного средства, блок уведомления о необходимости обслуживания элементов транспортного средства. Способ управления гибридным транспортным средством заключается в вычислении первого показателя состояния, вычислении второго показателя состояния. Первый показатель состояния показывает показатель пробега в первом режиме пробега. Второй показатель показывает показатель пробега во втором режиме пробега. Определяют необходимость обслуживания элементов транспортного средства на основе первого и второго показателей состояния. Выдают пользователю уведомление о необходимости обслуживания элементов транспортного средства на основе результата определения. Технический результат заключается в повышении точности определения состояния элементов транспортного средства. 2 н. и 21 з.п. ф-лы, 17 ил.
Формула
Документы, цитированные в отчёте о поиске
Носитель записи, устройство и способ воспроизведения носителя записи и способ изготовления носителя записи
Комментарии