Устройство управления гибридного транспортного средства - RU2668448C2
Код документа: RU2668448C2
Чертежи





Описание
Область техники
Настоящее изобретение относится к устройству управления гибридного транспортного средства, имеющему электромотор, который начинает запуск двигателя, который приводит в движение ведущее колесо, когда выполнен запрос на запуск двигателя.
Уровень техники
Традиционно, гибридное транспортное средство, которое имеет двигатель, который приводится в действие посредством топлива, и электромотор, который приводится в действие посредством мощности, которая накапливается в аккумуляторе, в качестве источников приведения в движение для обеспечения движения, содержит первую муфту, выполненную с возможностью разделять передачу мощности между двигателем и электромотором.
Устройство управления гибридного транспортного средства, которое монтируется на этом типе гибридного транспортного средства, в котором при движении только с помощью электромотора в качестве источника приведения в движение с расцепленной первой муфтой, когда предусмотрен запрос на запуск двигателя, первая муфта зацепляется и двигатель запускается с электромотором в качестве стартерного электромотора, известно (см., например, JP 2008-179242). При запуске двигателя с электромотором в качестве стартерного электромотора, проворачивание завершается, когда частота вращения электромотора и частота вращения двигателя совпадают, и разностное вращение первой муфты исключается.
Задачи, решаемые изобретением
В устройстве управления гибридного транспортного средства карта запуска двигателя задается заранее в соответствии, например, с требуемой движущей силой водителя и SOC аккумулятора, и запрос на запуск двигателя выводится на основе позиции значения, которое определяется из требуемой движущей силы и SOC аккумулятора на этой карте запуска двигателя. В традиционном устройстве управления гибридного транспортного средства запрос на запуск двигателя выводится на основе карты запуска двигателя, требуемой движущей силы и SOC аккумулятора, независимо от частоты вращения электромотора в качестве стартерного электромотора.
Соответственно, если частота вращения электромотора, когда запрос на запуск двигателя выводится, является относительно высокой, проворачивание не может выполняться, если частота вращения двигателя не также представляет собой высокоскоростное вращение. Следовательно, имеется проблема в том, что потребление топлива двигателя становится недостаточным.
С учетом проблемы, описанной выше, задачей настоящего изобретения является создание устройства управления гибридного транспортного средства, которое позволяет предотвращать ухудшение характеристик расхода топлива, вызываемое посредством запуска двигателя.
Средства, используемые для решения указанной задачи
Для решения вышеуказанной задачи устройство управления гибридного транспортного средства согласно настоящему изобретению монтируется на гибридном транспортном средстве и содержит двигатель; электромотор, предусмотренный в приводной системе от двигателя до ведущих колес, чтобы запускать двигатель и приводить в действие ведущие колеса; и механизм переключения режима, предусмотренный в соединительном участке двигателя и электромотора, который запускает двигатель посредством передачи крутящего момента электромотора в двигатель, когда предусмотрен запрос на запуск двигателя при движении только с помощью электромотора в качестве источника приведения в движение. Устройство управления гибридного транспортного средства дополнительно содержит модуль управления запуском двигателя, выполненный с возможностью затруднять запуск двигателя, когда скорость транспортного средства увеличивается в соответствии с операцией нажатия акселератора, до тех пор, пока не будет сформировано уменьшение частоты вращения электромотора посредством переключения коробки передач "вверх", которое уменьшает передаточное отношение посредством задания условия запуска двигателя более строгим.
Преимущества изобретения
В настоящем изобретении может подавляться формирование запроса на запуск двигателя, когда частота вращения электромотора является относительно высокой, и может исключаться возникновение ситуации, в которой частота вращения двигателя увеличивается во время запуска двигателя. Как результат, может предотвращаться ухудшение характеристик расхода топлива вследствие запуска двигателя.
Краткое описание чертежей
Фиг. 1 является общей схемой системы, иллюстрирующей заднеприводное гибридное транспортное средство FR-типа (один пример гибридного транспортного средства), к которому применяется устройство управления по первому варианту осуществления.
Фиг. 2 является схемой, иллюстрирующей один пример карты выбора EV-HEV, которая задается в модуле выбора режима интегрального контроллера по первому варианту осуществления.
Фиг. 3 является принципиальной схемой, иллюстрирующей один пример автоматической трансмиссии, содержащей вторую муфту по первому варианту осуществления.
Фиг. 4 является таблицей операций зацепления, иллюстрирующей состояние зацепления каждого фрикционного зацепляющего элемента на каждой ступени зубчатой передачи автоматической трансмиссии по первому варианту осуществления.
Фиг. 5 является схемой, иллюстрирующей один пример карты переключения передач автоматической трансмиссии, заданной в AT-контроллере в первом варианте осуществления.
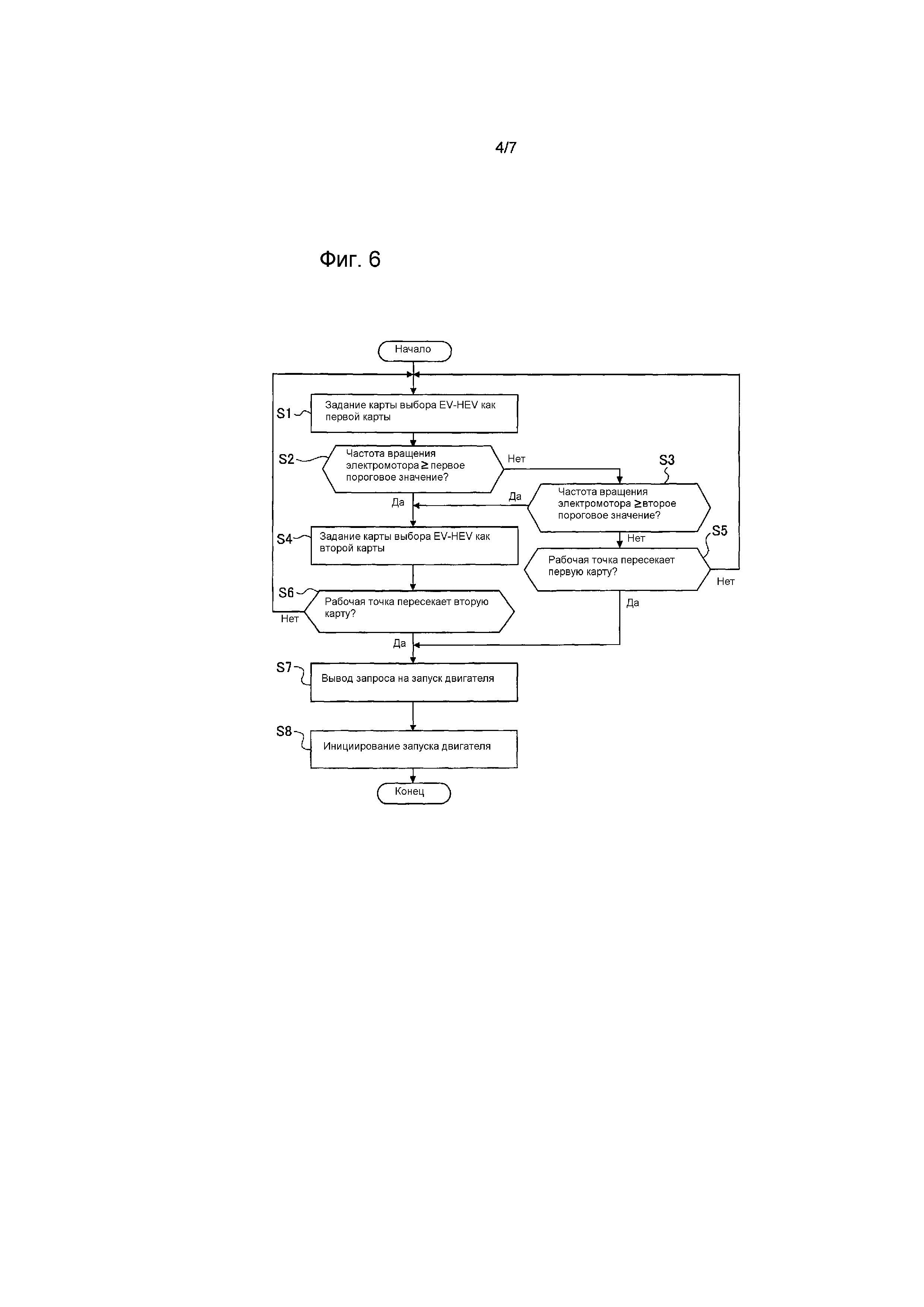
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса определения запуска двигателя, который выполняется в интегральном контроллере по первому варианту осуществления.
Фиг. 7 является схемой, иллюстрирующей карту выбора EV-HEV, которая применяется в процессе определения запуска двигателя по первому варианту осуществления.
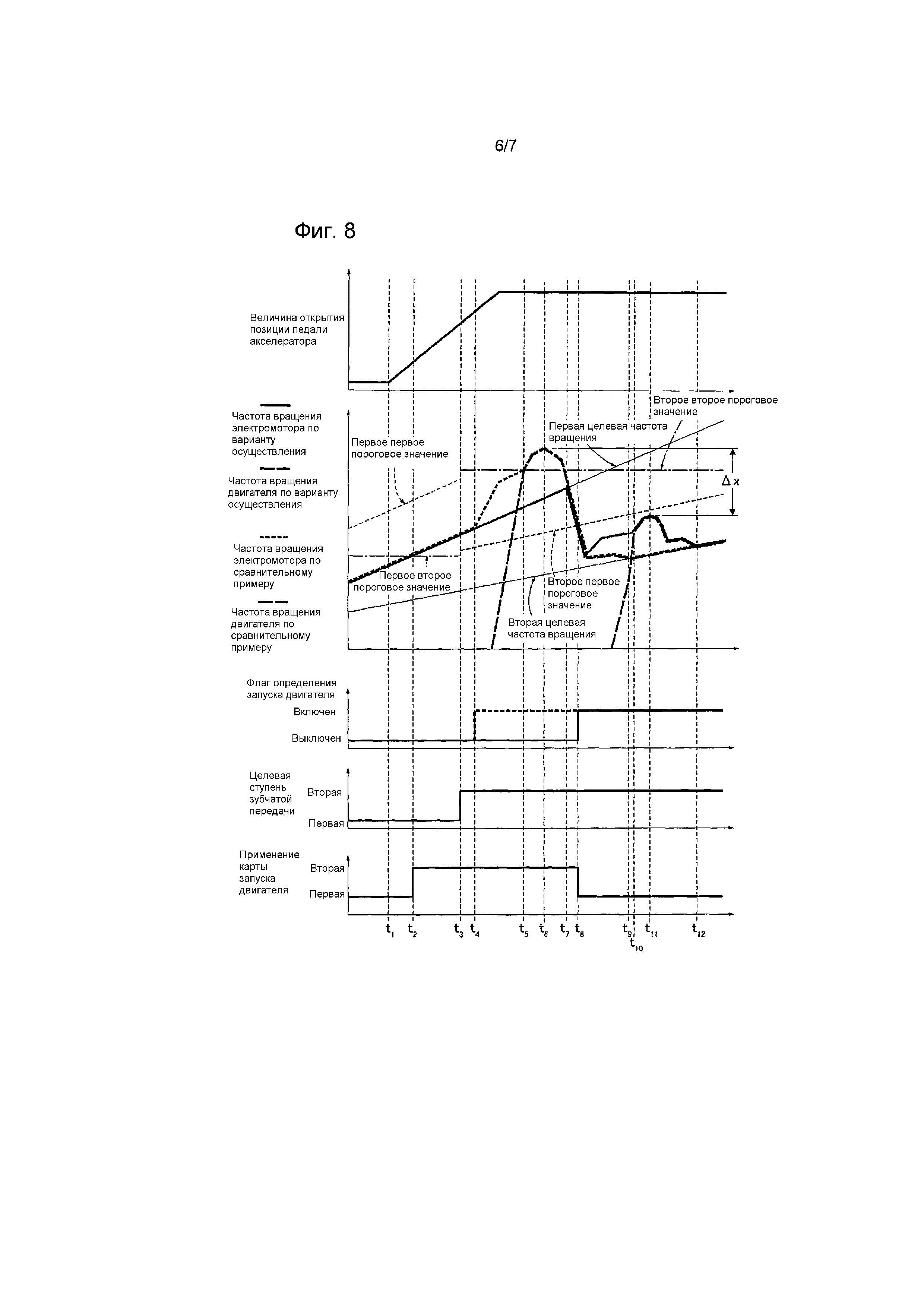
Фиг. 8 является временной диаграммой, иллюстрирующей соответствующие характеристики величины открытия позиции педали акселератора при запуске двигателя, частоты вращения электромотора, частоты вращения двигателя, флага определения запуска двигателя, целевой ступени зубчатой передачи и карту запуска двигателя, которые должны применяться в устройстве управления по первому варианту осуществления.
Фиг. 9 является пояснительной схемой, иллюстрирующей пороговое значение частоты вращения электромотора на основе величины открытия позиции педали акселератора в устройстве управления по первому варианту осуществления.
Фиг. 10 является пояснительной схемой, иллюстрирующей пороговое значение частоты вращения электромотора на основе SOC аккумулятора в устройстве управления по первому варианту осуществления.
Предпочтительные варианты осуществления изобретения
Далее поясняется вариант осуществления для реализации устройства управления гибридного транспортного средства настоящего изобретения на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления изобретения
Сначала описывается конфигурация.
"Общая конфигурация системы", "Схематичная конфигурация автоматической трансмиссии" и "Конфигурация процесса определения запуска двигателя" отдельно описываются относительно конфигурации устройства управления транспортного средства с электроприводом в первом варианте осуществления.
Общая конфигурация системы
Фиг. 1 иллюстрирует заднеприводное гибридное транспортное средство FR-типа (один пример гибридного транспортного средства), к которому применяется устройство управления по первому варианту осуществления; фиг. 2 иллюстрирует один пример карты выбора EV-HEV, которая задается в модуле выбора режима интегрального контроллера. Ниже описывается общая конфигурация системы на основе фиг. 1 и фиг. 2.
Приводная система гибридного транспортного средства FR-типа содержит двигатель Eng, первую муфту CL1 (механизм переключения режима), электромотор/генератор MG (электромотор), вторую муфту CL2, автоматическую трансмиссию AT (трансмиссию), входной трансмиссионный вал IN, карданный вал PS, дифференциал DF, левый ведущий вал DSL, правый ведущий вал DSR, левое заднее колесо RL (ведущее колесо) и правое заднее колесо RR (ведущее колесо), как проиллюстрировано на фиг. 1. M-O/P - это механический масляный насос, S-O/P - это электрический масляный насос, FL - это левое переднее колесо, FR - это правое переднее колесо, и FW - это маховик.
Двигатель Eng представляет собой бензиновый двигатель или дизельный двигатель, который становится источником приведения в движение для обеспечения движения, в котором управление запуском двигателя, управление остановкой двигателя и управление открытием клапана дроссельного клапана выполняются на основе команды управления двигателем из контроллера 1 двигателя. Маховик FW предусмотрен на выходном валу двигателя.
Электромотор/генератор MG представляет собой синхронный электромотор/генератор, в котором постоянный магнит встраивается в ротор, и обмотка статора наматывается на статоре, который становится источником приведения в движение для обеспечения движения. Этот электромотор/генератор MG управляется посредством приложения трехфазного переменного тока, который формируется посредством инвертора 3, на основе команды управления из контроллера 2 электромотора. Этот электромотор/генератор MG может работать в качестве электромотора, который вращательно приводится в действие посредством приема электропитания из аккумулятора 4 (это состояние в дальнейшем называется "подачей питания"); либо он может выступать в качестве электрогенератора, который формирует электродвижущую силу на обоих концах обмотки статора и заряжает аккумулятор 4, когда ротор принимает вращательную энергию из двигателя Eng или ведущих колес (этот рабочий режим в дальнейшем называется "рекуперацией"). Дополнительно, когда первая муфта CL1 зацепляется, электромотор-генератор становится стартерным электромотором, который запускает двигатель Eng. Ротор этого электромотора/генератора MG соединяется с входным трансмиссионным валом IN автоматической трансмиссии AT через демпфер.
Первая муфта CL1 представляет собой зацепляющий элемент, который предусмотрен между двигателем Eng и электромотором/генератором MG. Эта первая муфта CL1 является так называемой нормально закрытой муфтой, которая переводится в зацепленное состояние посредством силы смещения диафрагменной пружины и т.д., когда гидравлическое давление CL1 не прикладывается, и которая расцепляется посредством приложения гидравлического давления CL1, которое уравновешивает эту силу смещения. Эта первая муфта CL1 зацепляется, когда предусмотрен запрос на запуск двигателя, и крутящий момент электромотора/генератора MG передается в двигатель Eng, чтобы запускать двигатель.
Автоматическая трансмиссия AT представляет собой ступенчатую трансмиссию, в которой ступени зубчатой передачи с семью передачами переднего хода/одной передачей заднего хода автоматически переключаются в соответствии со скоростью транспортного средства, открытием акселератора и т.п. Выходной вал автоматической трансмиссии AT соединяется с левым и правым задними колесами RL, RR через карданный вал PS, дифференциал DF, левый ведущий вал DSL и правый ведущий вал DSR.
Вторая муфта CL2 представляет собой фрикционный зацепляющий элемент, который располагается в тракте передачи мощности из электромотора/генератора MG на левое и правое задние колеса RL, RR. Здесь, фрикционный зацепляющий элемент (муфта или тормоз) для переключения передач автоматической трансмиссии AT используется в качестве второй муфты CL2 вместо использования нового добавленного фрикционного зацепляющего элемента в качестве выделенной муфты, которая является независимой от автоматической трансмиссии AT. Иными словами, из множества фрикционных зацепляющих элементов, которые зацепляются на каждой ступени зубчатой передачи автоматической трансмиссии AT, фрикционный зацепляющий элемент, который выбирается в качестве элемента, который соответствует условиям зацепления и т.д., выполнен с возможностью представлять собой вторую муфту CL2. Гидравлический узел 6 первой муфты и гидравлический узел 8 второй муфты включены в гидравлический регулирующий клапанный узел CVU AT, который предусмотрен в автоматической трансмиссии AT.
Такое гибридное транспортное средство FR-типа содержит режим гибридного транспортного средства (в дальнейшем называемый "EV-режимом"), режим гибридного транспортного средства (в дальнейшем называемый "HEV-режимом") и режим управления крутящим моментом приведения в движение (в дальнейшем называемый "WSC-режимом"), в качестве режимов согласно различиям в режиме приведения в движение.
"EV-режим" представляет собой режим, в котором первая муфта CL1 расцеплена, и в котором электромотор/генератор MG является единственным источником приведения в движение, содержащий режим приведения в движение за счет электромотора (с подачей мощности от электромотора) и режим выработки за счет генератора (с рекуперацией за счет генератора). Этот EV-режим выбирается, например, когда требуемая движущая сила является низкой, и обеспечивается SOC аккумулятора.
"HEV-режим" представляет собой режим, в котором первая муфта CL1 переводится в зацепленное состояние, в котором двигатель Eng и электромотор/генератор MG сконфигурированы как источник приведения в движение, содержащий режим с использованием усиления электромотора (с подачей мощности от электромотора), режим выработки за счет двигателя (с рекуперацией за счет генератора) и режим выработки за счет рекуперативного замедления (с рекуперацией за счет генератора). Этот "HEV-режим" выбирается, например, когда требуемая движущая сила является высокой, либо когда SOC аккумулятора является недостаточным.
"WSC-режим" представляет собой режим, в котором режим приведения в движение представляет собой "HEV-режим", но перегрузочная способность по передаче крутящего момента второй муфты CL2 управляется при поддержании второй муфты CL2 в состоянии зацепления в режиме проскальзывания посредством управления частотой вращения электромотора/генератора MG. Перегрузочная способность по передаче крутящего момента второй муфты CL2 управляется таким образом, что движущая сила, которая передается через вторую муфту CL2, представляет собой требуемую движущую силу, которая представлена посредством рабочей величины нажатия педали акселератора водителя. Этот "WSC-режим" выбирается, когда частота вращения двигателя находится в области, которая опускается ниже частоты вращения на холостом ходу, как при запуске, когда "HEV-режим" выбирается.
Система управления гибридным транспортным средством FR-типа выполнена с возможностью содержать контроллер 1 двигателя, контроллер 2 электромотора, инвертор 3, аккумулятор 4, контроллер 5 первой муфты, гидравлический узел 6 первой муфты, AT-контроллер 7, гидравлический узел 8 второй муфты, тормозной контроллер 9 и интегрированный контроллер 10, как проиллюстрировано на фиг. 1.
Каждый из контроллеров 1, 2, 5, 7 и 9, описанных выше, и интегрированный контроллер 10 соединяются через линию 11 CAN-связи, которая обеспечивает возможность обмена информацией между ними. 12 - это датчик частоты вращения двигателя, 13 - это круговой датчик позиции, 15 - это датчик хода первой муфты, который определяет позицию хода поршня 14a гидравлического актуатора 14, 19 - это датчик скорости вращения колес, и 20 - это датчик хода тормоза.
AT-контроллер 7 вводит информацию из датчика 16 величины открытия педали акселератора, датчика 17 скорости транспортного средства, переключателя 18 режима движения, который определяет позицию выбранного диапазона (N-диапазон, D-диапазон, R-диапазон, P-диапазон и т.д.), и т.п. Затем при движении при выборе D-диапазона, выполняется поиск оптимальной ступени зубчатой передачи из позиций, в которых рабочая точка, определенная из величины APO открытия позиции педали акселератора и скорости VSP транспортного средства, существует на карте переключения передач (см. фиг. 5), и команда управления для получения искомой ступени зубчатой передачи выводится в гидравлический регулирующий клапанный узел CVU AT. В дополнение к этому управлению переключением передач, управление полным зацеплением (HEV-режим)/зацеплением в режиме проскальзывания (запуск двигателя)/расцеплением (EV-режим) первой муфты CL1 выполняется на основе команды из интегрированного контроллера 10. Кроме того, выполняется управление полным зацеплением (HEV-режим)/зацеплением в режиме проскальзывания на основе μ (EV-режим)/зацеплением в режиме проскальзывания с поглощением разности частот вращения (WSC-режим)/зацеплением в режиме проскальзывания с регулируемым блокированием крутящего момента (режим запуска/остановки двигателя) второй муфты CL2.
Здесь, при движении в EV-режиме с автоматической трансмиссией AT в состоянии без переключения передач, управление для того, чтобы поддерживать вращение в режиме микропроскальзывания (вращение в режиме проскальзывания на основе μ) второй муфты CL2, упоминается в качестве "управления режимом проскальзывания на основе μ". Это "управление режимом проскальзывания на основе μ" выполняется посредством управления частотой вращения электромотора, которое управляет фактической частотой вращения электромотора для электромотора/генератора MG таким образом, что задавать ее совпадающей с целевой частотой вращения электромотора, при которой вторая муфта CL2 находится во вращении в режиме микропроскальзывания. Крутящий момент электромотора во время этого управления частотой вращения электромотора соответствует нагрузке, которую электромотор/генератор MG принимает из второй муфты CL2; как результат, фактический крутящий момент CL2 может логически выводиться из значения обнаружения крутящего момента электромотора во время управления частотой вращения электромотора. Дополнительно, "управление режимом проскальзывания на основе μ" выполняется в состоянии без переключения передач EV, и когда целевой крутящий момент приведения в движение находится в области предварительно определенного значения или больше (заданной с учетом запрещенной области проскальзывания вследствие трения и т.д. или области, в которой точность не может обеспечиваться вследствие низкого гидравлического давления). Когда целевой крутящий момент приведения в движение составляет предварительно определенное значение или ниже, обеспечивается коэффициент запаса по перегрузочной способности, при котором вторая муфта CL2 не проскальзывает. Следовательно, сразу после EV-переключения передач и сразу после изменения режима с HEV-режима на EV-режим, вторая муфта CL2 проскальзывает за счет нажатия акселератора от момента, когда целевой крутящий момент приведения в движение является низким крутящим моментом, чтобы осуществлять управление режимом проскальзывания на основе μ.
Интегрированный контроллер 10 управляет энергопотреблением всего транспортного средства и допускает функцию движения транспортного средства с максимальной эффективностью; необходимая информация из датчика 12 частоты вращения электромотора, датчика 16 величины открытия позиции педали акселератора, датчика 17 скорости транспортного средства, датчика 21 частоты вращения электромотора и других сенсорных переключателей 22 вводится в него непосредственно или через линию 11 CAN-связи.
Дополнительно, этот интегрированный контроллер 10 содержит модуль 10a выбора режима, модуль 10b управления запуском двигателя, модуль 10c управления остановкой двигателя и модуль 10d выдачи команд управления в рабочей точке.
Модуль 10a выбора режима выбирает режим движения, искомый из позиции рабочей точки, которая определяется на основе величины APO открытия позиции педали акселератора и скорости VSP транспортного средства, с использованием карты выбора EV-HEV, проиллюстрированной на фиг. 2, в качестве целевого режима движения.
Линия переключения EV→HEV (=линия запуска двигателя), линия переключения HEV→EV (=линия остановки двигателя) и линия переключения HEV→WSC задаются на этой карте выбора EV-HEV. Когда рабочая точка (APO, VSP), которая существует в EV-области, пересекает линию переключения EV→HEV, целевой режим движения переключается с "EV-режима" на "HEV-режим" в модуле 10a выбора режима, и запрос на запуск двигателя выводится в модуль 10b управления запуском двигателя. Когда рабочая точка (APO, VSP), которая существует в HEV-области, пересекает линию переключения HEV→EV, целевой режим движения переключается с "HEV-режима" на "EV-режим" в модуле 10a выбора режима, и запрос на остановку двигателя выводится в модуль 10c управления остановкой двигателя. Линия переключения HEV→EV и линия переключения EV→HEV задаются с величиной гистерезиса в качестве линий, которые отделяют EV-область и HEV-область.
Карта выбора EV-HEV может задаваться на основе величины APO открытия позиции педали акселератора и SOC аккумулятора. В это время, когда SOC аккумулятора становится равным или меньше предварительно определенного значения, в то время как "EV-режим" выбирается, задается линия переключения EV→HEV, имеющая "HEV-режим" в качестве целевого режима движения; когда SOC аккумулятора становится равным или превышающим предварительно определенное значение, в то время как "HEV-режим" выбирается, задается линия переключения HEV→EV, имеющая "EV-режим" в качестве целевого режима движения.
Кроме того, когда рабочая точка (APO, VSP) пересекает линию переключения HEV→WSC и входит в WSC-область, в то время как "HEV-режим" выбирается, целевой режим движения переключается с "HEV-режима" на "WSC-режим" в модуле 10a выбора режима. Линия переключения HEV→WSC задается вдоль первой заданной скорости VSP1 транспортного средства, при которой двигатель Eng поддерживает частоту вращения на холостом ходу, когда автоматическая трансмиссия AT находится в предварительно определенной области низкого передаточного отношения.
Модуль 10b управления запуском двигателя зацепляет первую муфту CL1 и зацепляет в режиме проскальзывания вторую муфту CL2, чтобы выполнять управление запуском двигателя для запуска двигателя Eng с помощью электромотора/генератора MG в качестве стартерного электромотора в соответствии с вводом запроса на запуск двигателя. Процесс определения запуска двигателя, упомянутый ниже, выполняется в это время.
Модуль 10c управления остановкой двигателя расцепляет первую муфту CL1 и зацепляет в режиме проскальзывания вторую муфту CL2, чтобы выполнять управление остановкой двигателя для остановки двигателя Eng в соответствии с вводом запроса на остановку двигателя.
Модуль 10d выдачи команд управления в рабочей точке вычисляет целевой показатель наступления рабочей точки для гибридного транспортного средства FR-типа на основе входной информации, такой как величина APO открытия позиции педали акселератора, скорость VSP транспортного средства и целевой режим. Целевой крутящий момент двигателя, целевой крутящий момент MG, целевая частота вращения MG, целевой крутящий момент CL1, целевой крутящий момент CL2 и целевая ступень зубчатой передачи вычисляются как целевой показатель наступления рабочей точки. Затем этот модуль 10d выдачи команд управления в рабочей точке выводит команду управления целевым крутящим моментом двигателя, команду управления целевым крутящим моментом MG, команду управления целевой частотой вращения MG, команду управления целевым крутящим моментом CL1, команду управления целевым крутящим моментом CL2 и команду управления целевой ступенью зубчатой передачи в каждый из контроллеров 1, 2, 5, 7 через линию 11 CAN-связи.
Схематичная конфигурация автоматической трансмиссии
Фиг. 3 иллюстрирует схематичный вид, иллюстрирующий один пример автоматической трансмиссии, которая включает вторую муфту; фиг. 4 является таблицей операций зацепления, иллюстрирующей состояние зацепления каждого фрикционного зацепляющего элемента на каждой ступени зубчатой передачи автоматической трансмиссии; и фиг. 5 является видом, иллюстрирующим один пример карты переключения передач автоматической трансмиссии, которая задается в AT-контроллере по первому варианту осуществления. Ниже описывается схематичная конфигурация автоматической трансмиссии AT на основе фиг. 3-5.
Автоматическая трансмиссия AT представляет собой ступенчатую автоматическую трансмиссию с семью передачами переднего хода/одной передачей заднего хода; движущая сила, по меньшей мере, из одного из двигателя Eng и электромотора/генератора MG вводится из входного трансмиссионного вала Input; и частота вращения изменяется посредством механизма переключения передач, содержащего четыре шестерни планетарной передачи и семь фрикционных зацепляющих элементов, и выводится из выходного трансмиссионного вала Output, как проиллюстрировано на фиг. 3
Относительно механизма переключения передач, описанного выше, первая планетарная коробка GS1 передач, сконфигурированная из первой шестерни G1 планетарной передачи и второй шестерни G2 планетарной передачи, и вторая планетарная коробка GS2 передач, сконфигурированная из третьей шестерни G3 планетарной передачи и четвертой шестерни G4 планетарной передачи, размещаются коаксиально в этом порядке. Дополнительно, первая муфта C1 (I/C), вторая муфта C2 (D/C), третья муфта C3 (HandLR/C), первый тормоз B1 (Fr/B), второй тормоз B2 (Low/B), третий тормоз B3 (2346/B) и четвертый тормоз B4 (R/B) размещаются в качестве фрикционных зацепляющих элементов с гидравлическим приводом. Кроме того, первая односторонняя муфта F1 (первая OWC) и вторая односторонняя муфта F2 (1and2 OWC) размещается в качестве зацепляющих элементов с механическим приводом.
Первая шестерня G1 планетарной передачи, вторая шестерня G2 планетарной передачи, третья шестерня G3 планетарной передачи и четвертая шестерня G4 планетарной передачи представляют собой шестерни планетарной передачи с сателлитами одного типа, содержащие солнечные шестерни (S1-S4), коронные шестерни (R1-R4) и водила (PC1-PC4), которые поддерживают сателлиты (P1-P4), которые зацепляются с обеими шестернями (S1-S4), (R1-R4).
Входной трансмиссионный вал Input соединяется со второй коронной шестерней R2, и в него вводится вращающая движущая сила, по меньшей мере, из одного из двигателя Eng, и электромотора/генератора MG. Выходной трансмиссионный вал Output соединяется с третьим водилом PC3 и передает выходную вращающую движущую силу на ведущие колеса (левое и правое задние колеса RL, RR) через главную шестерню и т.п.
Первая коронная шестерня R1, второе водило PC2 и четвертая коронная шестерня R4 неразъемно соединены посредством первого соединительного элемента M1. Третья коронная шестерня R3 и четвертое водило PC4 неразъемно соединены посредством второго соединительного элемента M2. Первая солнечная шестерня S1 и вторая солнечная шестерня S2 неразъемно соединены посредством третьего соединительного элемента M3.
Фиг. 4 является таблицей операций зацепления; на фиг. 4, метка ○ указывает то, что фрикционный зацепляющий элемент гидравлически зацепляется в состоянии приведения в движение, метка (○) указывает то, что фрикционный зацепляющий элемент гидравлически зацепляется в состоянии движения по инерции (приведения в действие односторонней муфты в состоянии приведения в движение), а отсутствие метки указывает то, что фрикционный зацепляющий элемент находится в расцепленном состоянии. Дополнительно, фрикционный зацепляющий элемент в зацепленном состоянии, указываемом посредством штриховки, указывает элемент, который используется в качестве второй муфты CL2 на каждой ступени зубчатой передачи.
Относительно переключения на смежную ступень зубчатой передачи, ступени зубчатой передачи с семью передачами переднего хода и одной передачей заднего хода могут быть реализованы посредством поочередного переключения передач, при котором, из фрикционных зацепляющих элементов, описанных выше, один зацепленный фрикционный зацепляющий элемент расцепляется, а один расцепленный фрикционный зацепляющий элемент зацепляется, как проиллюстрировано на фиг. 4. Кроме того, когда ступень зубчатой представляет собой первую ступень зубчатой передачи и вторую ступень зубчатой передачи, второй тормоз B2 (Low/B) должен представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой первую третью ступень зубчатой передачи, вторая муфта C2 (D/C) должна представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой четвертую ступень зубчатой передачи и пятую ступень зубчатой передачи, третья муфта C3 (HandLR/C) должна представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой первую шестую ступень зубчатой передачи и седьмую ступень зубчатой передачи, первая муфта C1 (I/C) должна представлять собой вторую муфту CL2. Когда ступень зубчатой передачи представляет собой ступень зубчатой передачи заднего хода, четвертый тормоз B4 (R/B) должен представлять собой вторую муфту CL2.
Фиг. 5 является картой переключения передач; когда рабочая точка на карте, указываемая посредством скорости VSP транспортного средства и величины APO открытия позиции педали акселератора, пересекает линию переключения коробки передач "вверх", выводится команда переключения коробки передач "вверх". Например, когда ступень зубчатой передачи представляет собой первую ступень, и рабочая точка (VSP, APO) пересекает линию переключения коробки передач "вверх" 1→2 вследствие повышения скорости VSP транспортного средства, выводится команда переключения коробки передач "вверх" 1→2. Фиг. 5 описывает только линию переключения коробки передач "вверх", но, конечно, линия переключения коробки передач "вниз" также задана с гистерезисом относительно линии переключения коробки передач "вверх".
Конфигурация процесса определения запуска двигателя
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса определения запуска двигателя, который выполняется в модуле управления запуском двигателя по первому варианту осуществления. Фиг. 7 является видом, иллюстрирующим карту выбора EV-HEV, которая применяется в процессе определения запуска двигателя по первому варианту осуществления. Ниже описывается каждый этап блок-схемы последовательности операций способа на фиг. 6, представляющей конфигурацию процесса определения запуска двигателя. Этот процесс определения запуска двигателя выполняется, когда режим движения представляет собой "EV-режим".
На этапе S1, карта выбора EV-HEV, которая используется после выбора целевого режима в модуле 10a выбора режима интегрированного контроллера 10, задается в качестве первой карты запуска двигателя. Здесь, "карта запуска двигателя" является характеристической схемой, показывающей только линию переключения EV→HEV, которая является линией запуска двигателя на карте выбора EV-HEV; "первая карта запуска двигателя" проиллюстрирована посредством сплошных линий на фиг. 7. Эта "первая карта запуска двигателя" задается согласно величине APO открытия позиции педали акселератора и SOC аккумулятора. Величина APO открытия позиции педали акселератора является значением, которое варьируется пропорционально относительно требуемой движущей силы водителя и является эквивалентным значением требуемой водителем движущей силы. Помимо этого, SOC аккумулятора представляет оставшийся заряд аккумулятора, показывающий состояние заряда аккумулятора. Иными словами, это SOC аккумулятора становится эквивалентным значением состояния заряда аккумулятора.
На этапе S2, после задания первой карты запуска двигателя на этапе S1, выполняется определение в отношении того, равна или выше либо нет выходная частота вращения электромотора/генератора MG (в дальнейшем называемая "частотой вращения электромотора") первого порогового значения (порогового значения частоты вращения электромотора), которое задается заранее. Если "Да" (частота вращения электромотора ≥ первое пороговое значение), процесс переходит к этапу S4. Если "Нет" (частота вращения электромотора < первое пороговое значение), процесс переходит к этапу S3.
Здесь, частота вращения электромотора обнаруживается посредством датчика 12 частоты вращения электромотора. Помимо этого, "первое пороговое значение" задается в качестве значения, которое получается посредством умножения частоты вращения выходного трансмиссионного вала Output автоматической трансмиссии AT на передаточное отношение автоматической трансмиссии AT на целевой ступени зубчатой передачи. Здесь, значение, полученное посредством суммирования предварительно определенного допустимого запаса с интегрированным значением выходной частоты вращения трансмиссии и передаточного отношения, задается в качестве первого порогового значения.
На этапе S3, после определения того, что частота вращения электромотора < первое пороговое значение на этапе S2, выполняется определение в отношении того, равна или выше либо нет частота вращения электромотора второго порогового значения (порогового значения частоты вращения электромотора), которое задается заранее. Если "Да" (частота вращения электромотора ≥ второе пороговое значение), процесс переходит к этапу S4. Если "Нет" (частота вращения электромотора < второе пороговое значение), процесс переходит к этапу S5. "Второе пороговое значение" является значением, которое произвольно задано для каждой целевой ступени зубчатой передачи автоматической трансмиссии AT. Здесь, второе пороговое значение задается в качестве значения, которое получается посредством умножения произвольной постоянной на инверсию передаточного отношения автоматической трансмиссии AT на целевой ступени зубчатой передачи, и которое задается как меньшее значение по мере того, как ступень зубчатой передачи становится более низкой (передаточное отношение больше).
На этапе S4, после определения того, что частота вращения электромотора ≥ первое пороговое значение на этапе S2, или после определения того, что частота вращения электромотора ≥ второе пороговое значение на этапе S3, считается, что выходная частота вращения электромотора/генератора MG находится в состоянии относительно высокого уровня, и карта выбора EV-HEV, которая задается на этапе S1, переключается на вторую карту запуска двигателя. Здесь, "вторая карта запуска двигателя" является характеристической схемой, которая задается согласно величине APO открытия позиции педали акселератора и SOC аккумулятора, как проиллюстрировано посредством пунктирных линий на фиг. 7. На этой "второй карте запуска двигателя" часть области величины открытия позиции педали акселератора задается равной большему значению по сравнению со значением на первой карте запуска двигателя. Помимо этого, часть области SOC аккумулятора задается равной меньшему значению по сравнению со значением на первой карте запуска двигателя. Иными словами, условие запуска двигателя становится более строгим при запуске двигателя с использованием этой "второй карты запуска двигателя", по сравнению со случаем при запуске двигателя с использованием "первой карты запуска двигателя".
На этапе S5, после определения того, что частота вращения электромотора < второе пороговое значение на этапе S3, считается, что выходная частота вращения электромотора/генератора MG находится в состоянии низкого относительно уровня, и выполняется определение запуска двигателя, к которому применяется первая карта запуска двигателя. Иными словами, выполняется определение в отношении того, пересекает или нет рабочая точка (SOC, APO), которая определяется согласно SOC аккумулятора и величине APO открытия позиции педали акселератора, первую карту запуска двигателя, которая задается на этапе S1, к стороне HEV-области. Если "Да" (пересекает), процесс переходит к этапу S7. Если "Нет" (не пересекает), процесс возвращается к этапу S1.
На этапе S6, после переключения второй карты запуска двигателя на этапе S4, выполняется определение запуска двигателя, к которому применяется вторая карта запуска двигателя. Иными словами, выполняется определение в отношении того, пересекает или нет рабочая точка (SOC, APO), которая определяется согласно величине APO открытия позиции педали акселератора и SOC аккумулятора, вторую карту запуска двигателя, которая задается на этапе S4, к стороне HEV-области. Если "Да" (пересекает), процесс переходит к этапу S7. Если "Нет" (не пересекает), процесс возвращается к этапу S1.
На этапе S7, после определения того, что рабочая точка (APO, SOC) пересекает первую карту запуска двигателя на этапе S5, или определения того, что рабочая точка (APO, SOC) пересекает вторую карту запуска двигателя на этапе S6, запрос на запуск двигателя выводится, и процесс переходит к этапу S8. Флаг запуска двигателя переключается из выключенного состояния во включенное при выводе этого запроса на запуск двигателя.
На этапе S8, после вывода запроса на запуск двигателя на этапе S7, начинается управление запуском двигателя, и процесс завершается.
Здесь, управление запуском двигателя управляет перегрузочной способностью по передаче крутящего момента второй муфты CL2 таким образом, что она представляет собой требуемую движущую силу водителя при зацеплении в режиме проскальзывания второй муфты CL2, посредством управления частотой вращения электромотора/генератора MG. Затем первая муфта CL1 зацепляется для того, чтобы передавать крутящий момент электромотора/генератора MG в двигатель Eng, чтобы проворачивать двигатель Eng.
Далее описываются преимущества.
Во-первых, описывается "преимущество запуска двигателя в устройстве управления гибридного транспортного средства по сравнительному примеру", после чего описывается "преимущество управления запуском двигателя" в устройстве управления гибридного транспортного средства по первому варианту осуществления.
Преимущество запуска двигателя в устройстве управления гибридного транспортного средства по сравнительному примеру
Фиг. 8 является временной диаграммой, иллюстрирующей соответствующие характеристики величины открытия позиции педали акселератора при запуске двигателя, частоты вращения электромотора, частоты вращения двигателя, флага определения запуска двигателя, целевой ступени зубчатой передачи и карту запуска двигателя, которые должны применяться в устройстве управления по первому варианту осуществления. На фиг. 8, характеристики гибридного устройства управления по сравнительному примеру показаны посредством пунктирных линий. Ниже описывается преимущество запуска двигателя в устройстве управления гибридного транспортного средства по сравнительному примеру на основе фиг. 8.
Рассматривается случай, в котором гибридное транспортное средство, к которому применяется устройство управления по сравнительному примеру, движется в "EV-режиме" с автоматической трансмиссией AT на первой ступени зубчатой передачи (первой). Здесь, устройство управления по сравнительному примеру представляет собой устройство, которое всегда выполняет определение запуска двигателя с использованием первой карты запуска двигателя, показанной посредством сплошных линий на фиг. 7.
Когда акселератор нажимается во время t1, величина APO открытия позиции педали акселератора начинает увеличиваться. С другой стороны, выходная частота вращения электромотора/генератора MG (в дальнейшем называемая "частотой вращения электромотора") продолжает постепенное увеличение в соответствии с этой операцией нажатия акселератора.
Во время t3 рабочая точка (VSP, APO), которая определяется согласно скорости VSP транспортного средства и величине APO открытия позиции педали акселератора, пересекает линию переключения коробки передач "вверх" 1→2 на карте переключения передач, проиллюстрированной на фиг. 5, вследствие увеличения скорости транспортного средства (здесь не показано), и выводится команда переключения коробки передач "вверх" 1→2. Целевая ступень зубчатой передачи автоматической трансмиссии AT в силу этого изменяется с первой ступени зубчатой передачи (первой) на вторую ступень зубчатой передачи (вторую), и управление переключением передач начинается.
С другой стороны, величина APO открытия позиции педали акселератора продолжает увеличиваться; во время t4 рабочая точка (SOC, APO), которая определяется согласно SOC аккумулятора и величине APO открытия позиции педали акселератора, пересекает первую карту запуска двигателя, показанную на фиг. 7, и перемещается в HEV-область. Соответственно, запрос на запуск двигателя формируется, флаг запуска двигателя переключается из выключенного состояния во включенное, и управление запуском двигателя инициируется.
Частота вращения электромотора за счет этого увеличивается для того, чтобы зацеплять в режиме проскальзывания вторую муфту CL2. Помимо этого, первая муфта CL1 зацепляется, крутящий момент электромотора передается в двигатель Eng, и выходная частота вращения двигателя Eng (в дальнейшем называемая "частотой вращения двигателя") начинает повышаться.
Когда частота вращения электромотора и частота вращения двигателя совпадают во время t5, считается, что запуск двигателя завершен, и частота вращения электромотора и частота вращения двигателя еще более увеличиваются для того, чтобы переводить двигатель в состояние полного сгорания. С другой стороны, управление переключением передач на основе команды переключения коробки передач "вверх" 1→2, которая выведена во время t3, выполняется в это время. Следовательно, частота вращения электромотора и частота вращения двигателя резко падают после достижения максимума во время t6. Затем во время t9, частота вращения электромотора и частота вращения двигателя задаются таким образом, что они совпадают с целевой частотой вращения после переключения передач, и переключение коробки передач "вверх" 1→2 завершается.
Таким образом, в устройстве управления по сравнительному примеру, определение запуска двигателя выполняется с использованием первой карты запуска двигателя, независимо от абсолютной величины частоты вращения электромотора. Следовательно, запрос на запуск двигателя выводится в соответствии с состоянием рабочей точки (SOC, APO), которое определяется согласно SOC аккумулятора и величине APO открытия позиции педали акселератора, даже если переключение коробки передач "вверх" 1→2 не завершено, и частота вращения электромотора находится в состоянии относительно высокого уровня, как описано выше. Следовательно, частота вращения двигателя должна увеличиваться, чтобы совпадать с частотой вращения электромотора во время запуска двигателя, вызывая такую проблему, что расход топлива становится недостаточным.
Помимо этого, поскольку частота вращения двигателя быстро увеличивается, стрелка прибора, которая отображает частоту вращения двигателя (тахометр), существенно отклоняется, создавая состояние явного набора оборотов двигателя. Следовательно, возникает такая проблема, что вызывается дискомфорт у водителя вследствие существенного отклонения стрелки, даже если нет существенного изменения ощущения при движении, которое испытывает водитель.
Затем, как описано выше, в случае если переключение коробки передач "вверх" 1→2 завершено после запуска двигателя, частота вращения двигателя становится высокоскоростным вращением во время запуска двигателя, затем резко падая таким образом, что она совпадает с частотой вращения после переключения передач. Следовательно, так называемое варьирование частоты звука двигателя увеличивается, и звук при запуске двигателя становится громче.
Помимо этого, электромотор/генератор MG имеет такую характеристику, что крутящий момент электромотора снижается в области высокоскоростного вращения. Следовательно, если частота вращения электромотора представляет собой высокоскоростное вращение, то крутящий момент электромотора, который может быть использован для запуска двигателя, должен быть ограничен. Таким образом, в ситуации при движении, в которой верхнее предельное значение перегрузочной способности по передаче крутящего момента второй муфты CL2 снижается, и как результат, ускорение осуществляется в соответствии с запуском двигателя, возникает риск того, что требуемая движущая сила не может полностью удовлетворяться, приводя к прерыванию движущей силы или запаздыванию во времени до тех пор, пока крутящий момент не будет передан на ведущие колеса.
Преимущество управления запуском двигателя
Рассматривается случай, в котором гибридное транспортное средство, к которому применяется устройство управления по первому варианту осуществления, движется в "EV-режиме" с автоматической трансмиссией AT на первой ступени зубчатой передачи (первой). Ниже описывается преимущество управления запуском двигателя в устройстве управления гибридного транспортного средства по первому варианту осуществления на основе фиг. 8.
Когда акселератор нажимается во время t1, величина APO открытия позиции педали акселератора начинает увеличиваться, в то время как частота вращения электромотора продолжает постепенное увеличение. В это время, поскольку движение выполняется в "EV-режиме", выполняется блок-схема последовательности операций способа, проиллюстрированная на фиг. 6, и первая карта запуска двигателя, показанная посредством сплошных линий на фиг. 7, задается в качестве карты запуска двигателя на этапе S1. Затем процесс переходит к этапу S2, и выполняется определение в отношении того, равна или выше либо нет частота вращения электромотора первого порогового значения.
Здесь, первое пороговое значение задается в качестве значения, полученного посредством суммирования предварительно определенного допустимого запаса со значением, полученным посредством умножения частоты вращения выходного трансмиссионного вала Output автоматической трансмиссии AT на передаточное отношение автоматической трансмиссии AT на целевой ступени зубчатой передачи. Поскольку целевая ступень зубчатой передачи является первой ступенью зубчатой передачи (первой) во время t1, ее характеристическая схема становится такой, как показано посредством тонких пунктирных линий на фиг. 8. Поскольку частота вращения электромотора ниже первого порогового значения в это время t1, процесс переходит к этапу S3, и выполняется определение в отношении того, равна или выше либо нет частота вращения электромотора второго порогового значения.
Второе пороговое значение является значением, которое задается в качестве значения, полученного посредством умножения произвольной постоянной на инверсию передаточного отношения автоматической трансмиссии AT на целевой ступени зубчатой передачи. Поскольку целевая ступень зубчатой передачи является первой ступенью зубчатой передачи (первой) во время t1, ее характеристическая схема становится такой, как показано посредством тонких пунктирных линий на фиг. 8. Поскольку частота вращения электромотора ниже второго порогового значения в это время t1, процесс переходит к этапу S5, и определение запуска двигателя выполняется посредством применения первой карты запуска двигателя.
Поскольку величина APO открытия позиции педали акселератора является низкой в это время, рабочая точка (SOC, APO), которая определяется согласно SOC аккумулятора и величине APO открытия позиции педали акселератора, находится в позиции P1, показанной на фиг. 7, и остается в EV-области. Иными словами, эта рабочая точка (SOC, APO) не пересекает первую карту запуска двигателя. Процесс в силу этого возвращается к этапу S1, и запрос на запуск двигателя не формируется.
После этого, частота вращения электромотора увеличивается, и частота вращения электромотора превышает второе пороговое значение во время t2. Процесс в силу этого переходит от этапа S3 к этапу S4 на блок-схеме последовательности операций способа, проиллюстрированной на фиг. 6, и карта выбора EV-HEV переключается на вторую карту запуска двигателя, показанную посредством пунктирных линий на фиг. 7. Процесс затем переходит к этапу S6, и определение запуска двигателя выполняется посредством применения этой второй карты запуска двигателя.
Поскольку величина APO открытия позиции педали акселератора увеличивается в это время, рабочая точка (SOC, APO) перемещается в позицию P2, которая ближе ко второй карте запуска двигателя, чем позиция (позиция P1) рабочей точки (SOC, APO) во время t1. Тем не менее, поскольку эта вторая карта запуска двигателя не пересечена, процесс возвращается к этапу S1, и запрос на запуск двигателя не формируется.
Во время t3 рабочая точка (VSP, APO), которая определяется согласно скорости VSP транспортного средства и величине APO открытия позиции педали акселератора, пересекает линию переключения коробки передач "вверх" 1→2 на карте переключения передач, проиллюстрированной на фиг. 5, вследствие увеличения скорости транспортного средства (здесь не показано), и выводится команда переключения коробки передач "вверх" 1→2. Целевая ступень зубчатой передачи автоматической трансмиссии AT в силу этого изменяется с первой ступени зубчатой передачи (первой) на вторую ступень зубчатой передачи (вторую), и управление переключением передач начинается.
С другой стороны, первое пороговое значение и второе пороговое значение изменяются при изменении целевой ступени зубчатой передачи с первой ступени зубчатой передачи (первой) на вторую ступень зубчатой передачи (вторую). Иными словами, первое пороговое значение задается в качестве значения, полученного посредством суммирования предварительно определенного допустимого запаса со значением, полученным посредством умножения частоты вращения выходного трансмиссионного вала Output автоматической трансмиссии AT на передаточное отношение автоматической трансмиссии AT на целевой ступени зубчатой передачи; в силу этого, оно имеет характеристическую схему, проиллюстрированную посредством толстых пунктирных линий на фиг. 8. Второе пороговое значение является значением, полученным посредством умножения произвольной постоянной на инверсию передаточного отношения автоматической трансмиссии AT на целевой ступени зубчатой передачи; в силу этого, оно имеет характеристическую схему, проиллюстрированную посредством толстых пунктирных линий на фиг. 8.
Когда первое пороговое значение и второе пороговое значение изменяются во время t3, частота вращения электромотора должна превышать первое пороговое значение в это время t3. Соответственно, процесс переходит от этапа S2 к этапу S4 на блок-схеме последовательности операций способа, проиллюстрированной на фиг. 6, и карта запуска двигателя переключается на вторую карту запуска двигателя, показанную посредством пунктирных линий на фиг. 7.
Затем операция нажатия педали акселератора продолжается, и рабочая точка (SOC, APO) перемещается в позицию P3 таким образом, что она пересекает первую карту запуска двигателя во время t4. Тем не менее, в это время, карта выбора EV-HEV задается как вторая карта запуска двигателя, показанная посредством пунктирных линий; как результат, определение представляет собой "Нет" на этапе S6, и запрос на запуск двигателя не формируется.
После этого, операция нажатия педали акселератора продолжается, и рабочая точка (SOC, APO) перемещается в позицию P4. С другой стороны, поскольку рабочая точка (SOC, APO) не пересекает вторую карту запуска двигателя, определение представляет собой "Нет" на этапе S6, и запрос на запуск двигателя не формируется.
Управление переключением передач продолжается, и управление частотой вращения электромотора начинает уменьшаться во время t7. Когда частота вращения электромотора становится равной или меньше первого порогового значения во время t8, процесс переходит от этапа S1 к этапу S2 и к этапу S3 на блок-схеме последовательности операций способа, проиллюстрированной на фиг. 6, и выполняется определение в отношении того, равна или выше либо нет частота вращения электромотора второго порогового значения. На второй ступени зубчатой передачи, второе пороговое значение является большим значением по сравнению с первым пороговым значением; следовательно, пороговое значение частоты вращения электромотора естественно ниже второго порогового значения, и процесс переходит к этапу S5.
В это время, после прохождения этапа S1, карта выбора EV-HEV задается как первая карта запуска двигателя. Затем посредством перехода к этапу S5, выполняется определение в отношении того, пересекает или нет рабочая точка (SOC, APO), которая определяется согласно SOC аккумулятора и величине APO открытия позиции педали акселератора, первую карту запуска двигателя.
Напротив, величина APO открытия позиции педали акселератора не изменена, и рабочая точка остается в позиции P4 во время t8. Соответственно, рабочая точка (SOC, APO) пересекает первую карту запуска двигателя и существует в HEV-области. В силу этого определение представляет собой "Да" на этапе S5, процесс переходит от этапа S7 к этапу S8, запрос на запуск двигателя формируется, и флаг запуска двигателя переключается из выключенного состояния во включенное. Затем управление запуском двигателя инициируется.
После этого, частота вращения двигателя увеличивается, частота вращения электромотора и частота вращения двигателя совпадают, и проворачивание двигателя завершается во время t10. Частота вращения электромотора и частота вращения двигателя за счет этого еще более увеличиваются для того, чтобы переводить двигатель в состояние полного сгорания. Помимо этого, управление переключением передач на основе команды переключения коробки передач "вверх" 1→2, которая выведена во время t3, выполняется в это время. Следовательно, частота вращения электромотора и частота вращения двигателя снижаются после достижения максимума во время t11. Затем переключение коробки передач "вверх" 1→2 завершается, когда частота вращения электромотора и частота вращения двигателя задаются таким образом, что они совпадают с целевой частотой вращения после переключения передач во время t12.
Как описано выше, в устройстве управления гибридного транспортного средства по первому варианту осуществления, запуск двигателя затрудняется, когда частота вращения электромотора является относительно высокой, по сравнению со случаем, когда эта частота вращения двигателя является относительно низкой. Соответственно, может подавляться возникновение ситуации, в которой начало запуска двигателя возникает в состоянии, в котором частота вращения двигателя является высокой, и увеличение частоты вращения двигателя при запуске двигателя может подавляться. Как результат, может достигаться снижение расхода топлива двигателя Eng.
Иными словами, в устройстве управления по сравнительному примеру частота вращения двигателя достигает максимума во время t6, в то время как в устройстве управления по первому варианту осуществления частота вращения двигателя достигает максимума во время t11. В это время, пиковое значение частоты вращения двигателя в устройстве управления по первому варианту осуществления является меньшим значением по сравнению с пиковым значением частоты вращения двигателя в устройстве управления по сравнительному примеру посредством Δx. Таким образом, поскольку двигатель может быть запущен при понижении пикового значения частоты вращения двигателя, объем впрыска топлива может уменьшаться, и может достигаться снижение расхода топлива.
Помимо этого, амплитуда стрелки прибора, которая отображает частоту вращения двигателя (тахометр), может подавляться таким образом, что она остается низкой посредством уменьшения пикового значения двигателя. Соответственно, может предотвращаться возникновение состояния явного набора оборотов двигателя, и ощущение при движении, которое испытывает водитель, и показания прибора должны совпадать, предотвращая вызывание дискомфорта у водителя.
Дополнительно, управление запуском двигателя начинается в момент времени, когда, частота вращения электромотора уменьшается, и переключение коробки передач "вверх" 1→2 почти завершается; как результат, даже если увеличена во время запуска двигателя, частота вращения двигателя не падает резко после этого, чтобы совпадать с частотой вращения после переключения передач. Соответственно, большое изменение так называемого варьирования частоты звука двигателя подавляется, и может предотвращаться увеличение громкости звука при запуске двигателя.
Поскольку управление запуском двигателя выполняется после того, как частота вращения электромотора становится относительно низкой, запуск двигателя может возникать в состоянии, в котором электромотор/генератор MG имеет достаточный крутящий момент электромотора. Крутящий момент электромотора, который может быть использован для того, чтобы запускать двигатель, в силу этого с меньшей вероятностью должен быть ограничен, и запуск двигателя при реагировании на требуемую движущую силу становится возможным даже в ситуации при движении, в которой ускорение осуществляется в соответствии с запуском двигателя; как результат, может предотвращаться формирование прерывания движущей силы или запаздывания во времени до тех пор, пока крутящий момент не будет передан на ведущие колеса.
Кроме того, в устройстве управления по первому варианту осуществления, как первое пороговое значение, так и второе пороговое значение задаются для каждой ступени зубчатой передачи автоматической трансмиссии AT относительно частоты вращения электромотора. Иными словами, первое пороговое значение и второе пороговое значение, которые являются пороговыми значениями частоты вращения электромотора, задаются согласно целевому передаточному числу автоматической трансмиссии AT.
Соответственно, если задано как меньшее значение на более низкой ступени зубчатой передачи, аналогично второму пороговому значению по первому варианту осуществления, может затрудняться выполнение запуска двигателя, когда частота вращения двигателя является высокой на низшей ступени зубчатой передачи, на которой разность в передаточном отношении между ступенями является относительно большой. Иными словами, функция настоящего изобретения может предоставляться только на определенных ступенях зубчатой передачи.
Кроме того, аналогично первому пороговому значению по первому варианту осуществления, пороговое значение частоты вращения электромотора может задаваться равным значению, которое выше частоты вращения, которая, как прогнозируется, повышается во время запуска двигателя, посредством задания его равным значению, полученному посредством умножения частоты вращения выходного вала автоматической трансмиссии AT на передаточное отношение автоматической трансмиссии AT на целевой ступени зубчатой передачи. Функция настоящего изобретения в силу этого может предоставляться во время переключения передач, а также когда частота вращения электромотора находится в высокой области.
Кроме того, в устройстве управления по первому варианту осуществления, для того чтобы затруднять запуск двигателя, когда частота вращения электромотора является относительно высокой, интегрированный контроллер 10 содержит первую карту запуска двигателя, которая задается согласно величине APO открытия позиции педали акселератора и SOC аккумулятора, и вторую карту запуска двигателя, на которой, по меньшей мере, величина APO открытия позиции педали акселератора задается равной значению, которое больше значения, и, по меньшей мере, часть SOC аккумулятора задается равной значению, которое меньше значения на первой карте запуска двигателя.
Когда частота вращения электромотора ниже первого порогового значения и второго порогового значения, определение запуска двигателя Eng выполняется с использованием первой карты запуска двигателя; когда частота вращения электромотора превышает одно из первого порогового значения или второго порогового значения, определение запуска двигателя Eng выполняется с использованием второй карты запуска двигателя.
Иными словами, например, как проиллюстрировано на фиг. 9, если SOC аккумулятора предположительно является постоянным, предусмотрено первое пороговое значение th1 запуска двигателя на первой карте запуска двигателя, а также второе пороговое значение th2 запуска двигателя на второй карте запуска двигателя, которое превышает это первое пороговое значение th1 запуска двигателя.
Если частота вращения электромотора ниже первого порогового значения и второго порогового значения, двигатель запускается, когда величина APO открытия позиции педали акселератора превышает первое пороговое значение th1 запуска двигателя на первой карте запуска двигателя. Если частота вращения электромотора превышает первое пороговое значение или второе пороговое значение, двигатель запускается, когда величина APO открытия позиции педали акселератора превышает второе пороговое значение th2 запуска двигателя на второй карте запуска двигателя, которое превышает первое пороговое значение th1 запуска двигателя.
Помимо этого, как проиллюстрировано на фиг. 10, если величина APO открытия позиции педали акселератора предположительно является постоянной, предусмотрено третье пороговое значение th3 запуска двигателя на первой карте запуска двигателя, а также четвертое пороговое значение th4 запуска двигателя на второй карте запуска двигателя, которое меньше этого третьего порогового значения th3 запуска двигателя.
Если частота вращения электромотора ниже первого порогового значения и второго порогового значения, двигатель запускается, когда SOC аккумулятора опускается ниже третьего порогового значения th3 запуска двигателя на первой карте запуска двигателя. Если частота вращения электромотора превышает первое пороговое значение или второе пороговое значение, двигатель запускается, когда SOC аккумулятора акселератора опускается ниже четвертого порогового значения th4 запуска двигателя на второй карте запуска двигателя, которое меньше третьего порогового значения th3 запуска двигателя.
Таким образом, может затрудняться выполнение запуска двигателя, когда частота вращения электромотора является высокой, через простую конфигурацию посредством варьирования порогового значения запуска двигателя, которое задается согласно величине APO открытия позиции педали акселератора, которая является эквивалентным значением требуемой водителем движущей силы, либо посредством варьирования порогового значения запуска двигателя, которое задается согласно SOC аккумулятора, которое является эквивалентным значением состояния заряда аккумулятора, в зависимости от абсолютной величины частоты вращения электромотора.
В частности, в первом варианте осуществления, карта выбора EV-HEV, которая задается согласно величине APO открытия позиции педали акселератора и SOC аккумулятора, варьируется согласно абсолютной величине частоты вращения электромотора. Соответственно, определение запуска двигателя может выполняться на основе условий требуемой движущей силы водителя и состояния заряда аккумулятора, так что может более надлежащим образом выполняться определение запуска двигателя.
В случае, проиллюстрированном на фиг. 8, описан пример, в котором запрос на запуск двигателя выводится, даже если частота вращения электромотора уменьшается вследствие управления переключением передач, и в котором величина APO открытия позиции педали акселератора является постоянной при переключении карты выбора EV-HEV со второй карты запуска двигателя на первую карту запуска двигателя.
Тем не менее, ситуация, в которой, запрос на запуск двигателя выводится, не ограничена этим. Например, даже в случае, если частота вращения электромотора превышает второе пороговое значение, и карта выбора EV-HEV задается как вторая карта запуска двигателя, если величина APO открытия позиции педали акселератора увеличивается посредством нажатия акселератора, и рабочая точка (SOC, APO) перемещается в позицию P5, показанную на фиг. 7, эта рабочая точка (SOC, APO) пересекает вторую карту запуска двигателя и перемещается в HEV-область.
В этом случае, частота вращения электромотора является относительно высокой; тем не менее, поскольку запрос на запуск двигателя выводится, и управление запуском двигателя выполняется, может удовлетворяться движущая сила, требуемая водителем.
Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться за счет устройства управления гибридного транспортного средства согласно первому варианту осуществления.
(1A) Изобретение монтируется на гибридном транспортном средстве, содержащем:
- двигатель Eng;
- электромотор MG (электромотор/генератор), предусмотренный в приводной системе от двигателя Eng до ведущих колес RL, RR (левого и правого задних колес), для запуска двигателя Eng и приведения в действие ведущих колес RL, RR; и
- механизм CL1 переключения режима (первую муфту), предусмотренный в соединительном участке двигателя Eng и электромотора MG, который запускает двигатель Eng посредством передачи крутящего момента из электромотора MG в двигатель Eng, когда предусмотрен запрос на запуск двигателя при движении только с помощью электромотора MG в качестве источника приведения в движение, и содержит:
- модуль 10b управления запуском двигателя, выполненный с возможностью затруднять запуск двигателя Eng, когда скорость транспортного средства увеличивается в соответствии с операцией нажатия акселератора, до тех пор, пока не будет сформировано уменьшение частоты вращения электромотора MG посредством переключения коробки передач "вверх", которое уменьшает передаточное отношение посредством задания условия запуска двигателя Eng более строгим.
В силу этого может подавляться увеличение частоты вращения двигателя при запуске двигателя, и может предотвращаться ухудшение характеристик расхода топлива вследствие запуска двигателя.
(1) Модуль 10b управления запуском двигателя выполнен с возможностью затруднять запуск двигателя затруднять запуск двигателя, когда частота вращения электромотора MG превышает пороговое значение частоты вращения электромотора (первое пороговое значение, второе пороговое значение), которое задается заранее, после того, как возникает уменьшение частоты вращения электромотора MG, посредством задания условия запуска двигателя более строгим, по сравнению со случаем, когда частота вращения электромотора MG ниже порогового значения частоты вращения электромотора (первого порогового значения, второго порогового значения).
В силу этого может подавляться увеличение частоты вращения двигателя при запуске двигателя, и может предотвращаться ухудшение характеристик расхода топлива вследствие запуска двигателя.
(2) Модуль 10b управления запуском двигателя выполнен с возможностью:
- запускать двигатель Eng, когда эквивалентное значение требуемой водителем движущей силы (величина APO открытия позиции педали акселератора) превышает первое пороговое значение th1 запуска двигателя, если частота вращения электромотора MG ниже порогового значения частоты вращения электромотора (первого порогового значения, второго порогового значения), и
- запускать двигатель Eng, когда эквивалентное значение требуемой водителем движущей силы (величина APO открытия позиции педали акселератора) превышает второе пороговое значение th2 запуска двигателя, которое превышает первое пороговое значение th1 запуска двигателя, если частота вращения электромотора MG превышает пороговое значение частоты вращения электромотора (первое пороговое значение, второе пороговое значение).
В силу этого может затрудняться выполнение запуска двигателя, когда частота вращения электромотора является высокой, через простую конфигурацию.
(3) Модуль 10b управления запуском двигателя выполнен с возможностью:
- запускать двигатель Eng, когда эквивалентное значение состояния заряда аккумулятора (SOC аккумулятора) ниже третьего порогового значения th3 запуска двигателя, если частота вращения электромотора MG ниже порогового значения частоты вращения электромотора (первого порогового значения, второго порогового значения), и
- запускать двигатель Eng, когда эквивалентное значение состояния заряда аккумулятора (SOC аккумулятора) опускается ниже четвертого порогового значения th4 запуска двигателя, которое меньше третьего порогового значения th3 запуска двигателя, если частота вращения электромотора MG превышает пороговое значение частоты вращения электромотора (первое пороговое значение, второе пороговое значение).
В силу этого может затрудняться выполнение запуска двигателя, когда частота вращения электромотора является высокой, через простую конфигурацию.
(4) Модуль 10b управления запуском двигателя содержит:
- первую карту запуска двигателя (сплошные линии), которая задается согласно эквивалентному значению требуемой водителем движущей силы (величине APO открытия позиции педали акселератора) и эквивалентному значению состояния заряда аккумулятора (SOC аккумулятора), и вторую карту запуска двигателя (пунктирные линии), в которой, по меньшей мере, часть эквивалентного значения требуемой водителем движущей силы (величины APO открытия позиции педали акселератора) задается равной значению, которое больше значения, и, по меньшей мере, часть эквивалентного значения состояния заряда аккумулятора (SOC аккумулятора), задается равной значению, которое меньше значения на первой карте запуска двигателя (сплошные линии), и выполнен с возможностью:
- выполнять определение запуска двигателя Eng с использованием первой карты запуска двигателя (сплошные линии), когда частота вращения электромотора MG ниже порогового значения частоты вращения электромотора (первого порогового значения, второго порогового значения), и
- выполнять определение запуска двигателя Eng с использованием второй карты запуска двигателя (пунктирные линии), когда частота вращения электромотора MG превышает пороговое значение частоты вращения электромотора (первое пороговое значение, второе пороговое значение).
Соответственно, определение запуска двигателя может выполняться на основе условий движущей силы, требуемой водителем, и состояния заряда аккумулятора, так что может более надлежащим образом выполняться определение запуска двигателя.
(5) Гибридное транспортное средство содержит трансмиссию AT (автоматическую трансмиссию), предусмотренную в приводной системе до электромотора MG до ведущих колес RL, RR, при этом:
- модуль 10b управления запуском двигателя выполнен с возможностью задавать пороговое значение частоты вращения электромотора (второе пороговое значение) согласно целевому передаточному числу трансмиссии AT.
В силу этого может затрудняться выполнение запуска двигателя, когда частота вращения двигателя является высокой только при движении на определенной ступени зубчатой передачи (при определенном передаточном отношении), чтобы эффективно подавлять ухудшение характеристик расхода топлива.
(6) Трансмиссия представляет собой ступенчатую автоматическую трансмиссию AT (автоматическую трансмиссию), содержащую множество ступеней зубчатой передачи, при этом:
- модуль 10b управления запуском двигателя выполнен с возможностью задавать пороговое значение частоты вращения электромотора (первое пороговое значение) равным значению, полученному посредством умножения частоты вращения выходного вала ступенчатой автоматической трансмиссии AT на передаточное отношение ступенчатой автоматической трансмиссии AT на целевой ступени зубчатой передачи.
В силу этого может затрудняться выполнение запуска двигателя, когда частота вращения двигателя является высокой во время переключения передач, либо когда частота вращения электромотора находится в высокой области, чтобы более эффективно подавлять ухудшение характеристик расхода топлива; как результат, может предотвращаться увеличение громкости звука при запуске двигателя.
Устройство управления гибридного транспортного средства настоящего изобретения описано выше на основе первого варианта осуществления, но его конкретные конфигурации не ограничены этим вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
В первом варианте осуществления, описанном выше, показан пример, в котором первая карта запуска двигателя и вторая карта запуска двигателя переключаются согласно абсолютной величине частоты вращения электромотора. Тем не менее, конфигурация для того, чтобы затруднять запуск двигателя, не ограничена этим. Например, запаздывание во времени может предоставляться от момента, когда формируется запрос на запуск двигателя, до момента, когда инициируется управление запуском двигателя, когда частота вращения электромотора является относительно высокой. Иными словами, даже когда рабочая точка (SOC, APO), которая определяется посредством SOC аккумулятора и величины APO открытия позиции педали акселератора, пересекает карту запуска двигателя, когда частота вращения электромотора является относительно высокой, управление запуском двигателя сразу не начинается, и время начала для запуска двигателя задерживается на предварительно установленное время.
В силу этого может затрудняться выполнение запуска двигателя, когда частота вращения электромотора является высокой, чтобы подавлять повышение в частоте вращения двигателя, и предотвращение ухудшения характеристик расхода топлива становится возможным.
Кроме того, время (запаздывание во времени) до начала этого управления запуском двигателя может варьироваться для каждой ступени зубчатой передачи автоматической трансмиссии AT; например, большее время может задаваться по мере того, как ступень зубчатой передачи становится более низкой. В силу этого может затрудняться выполнение запуска двигателя, когда частота вращения двигателя является высокой, только при движении на определенной ступени зубчатой передачи (при определенном передаточном отношении), чтобы эффективно подавлять ухудшение характеристик расхода топлива.
Помимо этого, в первом варианте осуществления, описанном выше, показан пример, в котором пороговое значение частоты вращения электромотора задается для каждой ступени зубчатой передачи автоматической трансмиссии AT, но изобретение не ограничено этим. Например, пороговое значение частоты вращения электромотора может задаваться согласно абсолютной величине величины APO открытия позиции педали акселератора, которая является эквивалентным значением требуемой водителем движущей силы. Иными словами, например, пороговое значение частоты вращения электромотора задается равным относительно высокому значению, когда акселератор сильно нажимается, и величина APO открытия позиции педали акселератора является относительно большой. При такой конфигурации, когда величина APO открытия позиции педали акселератора является большой, и движущая сила, требуемая водителем, считается высокой, начало запуска двигателя должно быстро выполняться, даже если частота вращения электромотора является высокой, и может удовлетворяться движущая сила, требуемая водителем.
Иными словами, посредством задания порогового значения частоты вращения электромотора согласно абсолютной величине эквивалентного значения требуемой водителем движущей силы, может предотвращаться ухудшение характеристик расхода топлива при одновременном быстром удовлетворении движущей силы, требуемой водителем.
Кроме того, время (запаздывание во времени) может предоставляться от момента, когда формируется запрос на запуск двигателя, до момента, когда начинается управление запуском двигателя, согласно абсолютной величине величины APO открытия позиции педали акселератора, которая является эквивалентным значением требуемой водителем движущей силы. Иными словами, когда величина APO открытия позиции педали акселератора является большой, и требуемая движущая сила водителя считается высокой, время от момента, когда формируется запрос на запуск двигателя, до момента, когда инициируется управление запуском двигателя, может задаваться относительно коротким. Следовательно, когда величина APO открытия позиции педали акселератора является большой, и движущая сила, требуемая водителем, считается высокой, запуск двигателя может быстро выполняться, и может удовлетворяться движущая сила, требуемая водителем.
Кроме того, в первом варианте осуществления, показан пример, в котором как первая карта запуска двигателя, так и вторая карта запуска двигателя переключаются согласно абсолютной величине частоты вращения электромотора, но настоящее изобретение не ограничено этим. Например, изобретение может быть изобретением, имеющим определенное число пороговых значений частоты вращения электромотора и число карт запуска двигателя, чтобы совпадать с пороговыми значениями частоты вращения электромотора.
Помимо этого, в первом варианте осуществления, показан пример, в котором первая муфта CL1 используется в качестве механизма переключения режима для переключения между HEV-режимом и EV-режимом. Тем не менее, изобретение не ограничено этим, и может быть предусмотрен пример, который использует дифференциал или устройство деления мощности, которое прилагает функцию муфты без использования муфты, такое как шестерня планетарной передачи.
Помимо этого, в первом варианте осуществления, показан пример, в котором элемент переключения передач в автоматической трансмиссии AT отклонен в качестве второй муфты CL2, и элемент, выбранный из трех зацепляющих элементов, которые зацепляются на каждой ступени зубчатой передачи, задается в качестве второй муфты CL2. Тем не менее, вторая муфта CL2 может представлять собой муфту, которая предоставляется независимо от автоматической трансмиссии, к примеру, муфту, которая располагается между электромотором и входным валом автоматической трансмиссии, или муфту, которая располагается между выходным валом автоматической трансмиссии и ведущими колесами.
Помимо этого, автоматическая трансмиссия AT не ограничена ступенчатой автоматической трансмиссией и может представлять собой бесступенчатую трансмиссию, ступенчатую ручную (ручную) трансмиссию или редуктор.
Дополнительно, в первом варианте осуществления, показан пример, в котором величина APO открытия позиции педали акселератора используется в качестве "эквивалентного значения требуемой водителем движущей силы", но изобретение не ограничено этим; например, могут применяться требуемое значение команды управления крутящего момента приведения в движение или другие значения, которые изменяются согласно требованиям водителя. Кроме того, показан пример, в котором SOC аккумулятора используется в качестве "эквивалентного значения состояния заряда аккумулятора", но изобретение не ограничено этим; например, может применяться разность времен заряда/разряда аккумулятора или значение, которое изменяется согласно состоянию заряда аккумулятора 4.
Кроме того, в первом варианте осуществления, показан пример, в котором карта запуска двигателя, которая используется для определения запуска двигателя, задается согласно SOC аккумулятора и величине APO открытия позиции педали акселератора, но изобретение не ограничено этим. Карта запуска двигателя может задаваться на основе скорости VSP транспортного средства и величины APO открытия позиции педали акселератора; либо карта запуска двигателя может задаваться на основе одного значения, такого как только величина APO открытия позиции педали акселератора, только SOC аккумулятора и т.п.
Реферат
Изобретение относится к гибридным транспортным средствам. Устройство управления силовым агрегатом гибридного транспортного средства, содержащего механизм переключения режима, предусмотренный в соединительном участке двигателя и электромотора, содержит модуль управления запуском двигателя, затрудняющий запуск двигателя, когда частота вращения электромотора превышает заданное пороговое значение, при определении того, что скорость транспортного средства увеличивается в соответствии с операцией нажатия акселератора. Устанавливают время для перехода из строгого режима запуска двигателя в нестрогий после уменьшения частоты вращения электромотора, которое осуществляется посредством переключения коробки передач "вверх", уменьшающего передаточное отношение. Улучшаются характеристики расхода топлива. 8 з.п. ф-лы, 10 ил.
Комментарии