Способ и система для регулирования шума, вибрации и резкости работы силового агрегата транспортного средства - RU2696175C2
Код документа: RU2696175C2
Чертежи












Описание
Область техники
Настоящее раскрытие в целом относится к способам и системам для управления двигателем транспортного средства в автономном режиме работы.
Уровень техники и раскрытие изобретения
Силовой агрегат транспортного средства оказывает значительное влияние на показатели шума, вибрации и резкости (ШВР) в транспортном средстве. Например, ШВР могут быть результатом вибрации, обусловленной недостаточным качеством сгорания, работой гидротрансформатора и включением/отключением цилиндров в двигателе с отключаемыми цилиндрами. Например, при отключении цилиндров возникают крутильные вибрации относительно низкой частоты и относительно высокой амплитуды на коленчатом валу. Возможна передача данных вибраций через такие компоненты, как сиденья, рулевое колесо и т.п., присутствующим в транспортном средстве людям (водителю и пассажирам), в результате чего в салоне транспортного средства возникает нежелательный шум. В трансмиссиях также возникают шумы, например, шум при зацеплении шестерен и шум насоса. В бензиновых двигателях источниками шума также являются, например, системы непосредственного впрыска топлива. В число примеров способов для подавления ШВР входит координированное подавление шума посредством электронно-управляемых устройств для обеспечения плавной бесперебойной работы. В некоторых примерах, для улучшения показателей ШВР, эксплуатацию двигателя в некоторых режимах, например, с отключением цилиндров, допускают только в определенных областях работы двигателя, например, при частотах вращения двигателя среднего диапазона с нагрузками от низких до средних.
При этом авторы настоящего изобретения выявили, что способы, ограничивающие ШВР, также отрицательно влияют на экономию топлива. Иными словами, установление ограничений по ШВР уменьшает возможности в части повышения экономии топлива. В результате, приходится выбирать между ШВР и экономией топлива, и ограничение по ШВР также становится ограничением для повышения экономии топлива, которое может обеспечить применяемая технология. Например, как сказано выше, диапазон применения топливосберегающих технологий, например, ОЦД, ограничен из-за ограничений по ШВР. Как следствие, их потенциал по улучшению экономии топлива также снижен. Кроме того, предполагается, что в транспортном средстве будет находиться человек в течение 100% времени движения транспортного средства, исходя из чего устанавливают предел ШВР для работы в каком-либо режиме и не меняют его в течение всего срока службы транспортного средства.
Авторы настоящего изобретения также установили, что в транспортных средствах с возможностью автономной работы предположение о том, что человек будет находиться в транспортном средстве, необязательно верно. Например, транспортное средство можно эксплуатировать в автономном режиме с отсутствием человека в интервале между местами посадки пассажиров или во время перевозки товаров. Во время отсутствия людей, средства активного управления для ограничения ШВР оказывают сильное отрицательное влияние на экономию топлива, при этом фактически не обеспечивая комфорт для водителя. Например, связанные с ШВР ограничения зависят от человеческого восприятия (например, через сиденье, руль, педаль, а также восприятия на слух для водителя; через сиденье и на слух для пассажира). Данные ограничения не применимы в отсутствии людей; при этом ограничения по ШВР влияют на повышение экономии топлива.
В одном примере вышеуказанные недостатки позволяет преодолеть способ для эксплуатации транспортного средства, в котором: при обнаружении отсутствия людей в транспортном средстве, в автономном режиме работы транспортного средства изменяют пределы шума, вибрации и резкости (ШВР) для силового агрегата транспортного средства для повышения экономии топлива. Таким образом, при обнаружении отсутствия людей в транспортном средстве ездовыми качествами можно пожертвовать для повышения экономии топлива.
Например, если во время работы транспортного средства в автономном режиме будет обнаружено отсутствие в нем людей, ограничения по ШВР, ограничивающие экономию топлива для применяемой технологии, можно смягчить для повышения экономии топлива. Например, снижение ограничений по ШВР позволяет расширить диапазон применения работы с отключением цилиндров, и/или отсечки топлива при замедлении, и/или рециркуляции отработавших газов для обеспечения большего повышения экономии топлива в ущерб показателям по ШВР. Также можно отрегулировать проскальзывание гидротрансформатора в сторону уменьшения для повышения экономии топлива за счет уменьшения разрыва потока мощности. Также можно отрегулировать график переключения передач для повышения экономии топлива. В результате будет повышена экономия топлива транспортного средства в ущерб ШВР. При этом воздействие ШВР не приведет к возникновению претензий пользователей, так как в транспортном средстве отсутствуют водитель и пассажиры. Таким образом, установление разных пределов или ограничений по ШВР в зависимости от присутствия или отсутствия людей позволяет в максимальном объеме применять такие топливосберегающие технологии, как работа с отключением цилиндров, ОТЗ и т.п., для повышения экономии топлива.
Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание фигур чертежа
ФИГ. 1А иллюстрирует пример движительной системы транспортного средства;
На ФИГ. 1В изображена принципиальная схема двигателя;
ФИГ. 2 изображает пример конфигурации системы привода транспортного средства;
ФИГ. 3 изображает блок-схему, иллюстрирующую пример способа для регулирования работы транспортного средства в зависимости от числа обнаруженных присутствующих людей;
ФИГ. 4 изображает блок-схему, иллюстрирующую пример способа для регулирования рециркуляции отработавших газов транспортного средства при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3;
ФИГ. 5 изображает блок-схему, иллюстрирующую пример способа для регулирования работы транспортного средства на холостом ходу при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3;
ФИГ. 6А изображает блок-схему, иллюстрирующую пример способа для регулирования работы с отключением цилиндров двигателя (ОЦД) транспортного средства при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3;
ФИГ. 6В изображает диаграмму, иллюстрирующую пример диапазона применения ОЦД при обнаружении отсутствия людей;
ФИГ. 7А изображает блок-схему, иллюстрирующую пример способа для регулирования работы гидротрансформатора транспортного средства при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3;
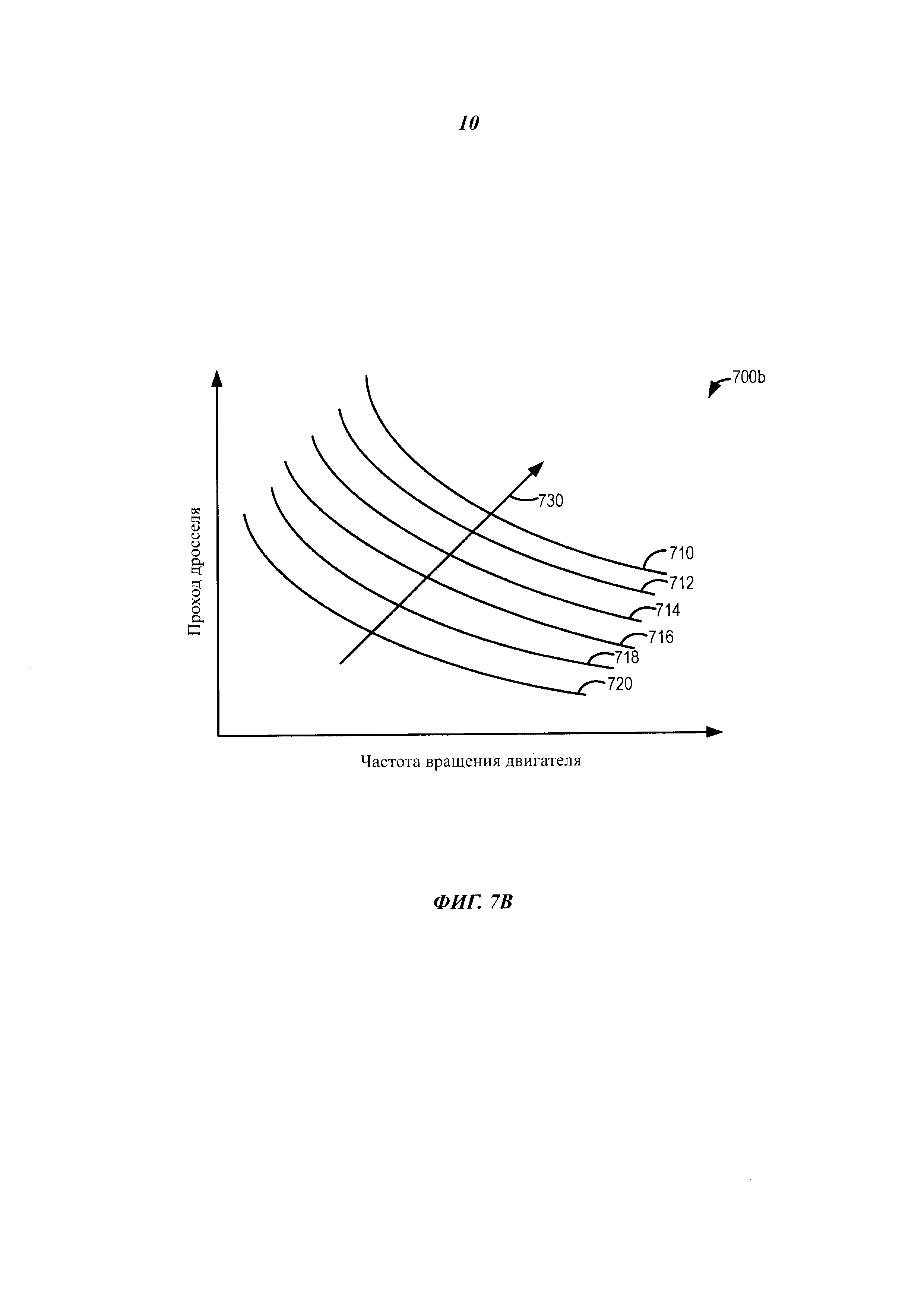
ФИГ. 7В изображает диаграмму, иллюстрирующую пример регулирования режима проскальзывания гидротрансформатора при обнаружении отсутствия людей в транспортном средстве;
ФИГ. 8А изображает блок-схему, иллюстрирующую пример способа для регулирования шума, вибрации и резкости (ШВР) транспортного средства в условиях с перегрузкой двигателя при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3;
ФИГ. 8В изображает диаграмму, иллюстрирующую пример коррекции порогов ШВР для перегрузки двигателя в зависимости от числа присутствующих в транспортном средстве людей.
ФИГ. 9 изображает блок-схему, иллюстрирующую пример способа для регулирования графика переключения передач при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3; и
ФИГ. 10 изображает блок-схему, иллюстрирующую пример способа для регулирования работы с отсечкой топлива при замедлении (ОТЗ) при обнаружении отсутствия людей, для применения совместно со способом на ФИГ. 3.
Осуществление изобретения
Нижеследующее описание относится к системам и способам для регулирования работы транспортного средства для изменения баланса между экономией топлива и шумом, вибрацией и резкостью (ШВР) транспортного средства, например, изображенного на ФИГ. 1А, в зависимости от числа присутствующих в транспортном средстве людей. Транспортное средство может быть выполнено с возможностью работы в режиме управления водителем, полуавтономном режиме или автономном режиме. Транспортное средство также может содержать систему обнаружения людей для обнаружения отсутствия людей в транспортном средстве. При обнаружении отсутствия людей в транспортном средстве, работу транспортного средства можно отрегулировать для большего повышения экономии топлива в ущерб ШВР. Регулирование работы транспортного средства может включать в себя регулирование одного или более электронно-управляемых устройств в системе привода транспортного средства, например, в системе привода на ФИГ. 2. В свою очередь, регулирование работы системы привода транспортного средства может включать в себя регулирование различных режимов эксплуатации двигателя транспортного средства, например, двигателя на ФИГ. 1В. Транспортное средство также может содержать контроллер, выполненный с возможностью выполнения алгоритма, например, алгоритма на ФИГ. 3, для определения числа присутствующих в транспортном средстве людей, и регулирования одного или более параметров работы транспортного средства в зависимости от числа присутствующих людей. А именно, контроллер может выполнять алгоритм на ФИГ. 4 совместно с алгоритмом на ФИГ. 3 для регулирования работы с рециркуляцией отработавших газов при отсутствии людей. Например, можно скорректировать порог желаемой процентной доли РОГ так, чтобы преимущество было отдано улучшению экономии топлива, а не ШВР, при отсутствии людей. Соответственно, когда присутствует один или более человек, контроллер транспортного средства может использовать первую зависимость РОГ, построенную по частоте вращения, нагрузке двигателя и номинальным ограничениям по ШВР, для определения желаемой процентной доли РОГ; а при отсутствии людей контроллер транспортного средства может использовать вторую, скорректированную, зависимость РОГ, построенную по частоте вращения, нагрузке двигателя и сниженным ограничениям по ШВР, для определения желаемой процентной доли РОГ. Контроллер также может выполнять алгоритм на ФИГ. 5 совместно с алгоритмом на ФИГ. 3 для регулирования работы на холостом ходу при отсутствии людей. Контроллер также может выполнять алгоритм на ФИГ. 6А совместно с алгоритмом на ФИГ. 3 для регулирования режима работы двигателя, при отсутствии людей. Например, двигатель может представлять собой двигатель с отключаемыми цилиндрами (ДОЦ). То есть двигатель можно эксплуатировать в режиме работы с частью цилиндров (в настоящем описании также именуемом «режим ОЦД») для уменьшения расходования топлива. При этом, как правило, двигатель эксплуатируют в режиме ОЦД только при средних частотах вращения и нагрузках от низких до средних, когда присутствует один или более человек, для уменьшения ШВР, ощущаемых присутствующими людьми, и, тем самым, улучшения дорожных качеств. При этом, при отсутствии людей в транспортном средстве, дорожные качества могут быть менее значимы. Поэтому режим работы двигателя с ОЦД можно применять и при более высоких нагрузках и более низких частотах вращения двигателя (например, частотах вращения холостого хода или близких к ним) для повышения экономии топлива. Примеры диапазонов применения режима работы двигателя с ОЦД в зависимости от числа присутствующих людей иллюстрирует диаграмма на ФИГ. 6В. Контроллер также может выполнять алгоритм на ФИГ. 7А совместно с алгоритмом на ФИГ.З для регулирования работы гидротрансформатора при отсутствии людей. Например, уменьшение проскальзывания гидротрансформатора может повысить экономию топлива за счет уменьшения разрыва потока мощности во время преобразования крутящего момента, с одновременным возможным ростом ШВР из-за уменьшения эффекта гашения. Поэтому, если будет обнаружено отсутствие людей, работу гидротрансформатора можно отрегулировать в сторону меньшего проскальзывания для повышения экономии топлива в ущерб ШВР. Пример регулирования режима проскальзывания гидротрансформатора при обнаружении отсутствия людей в транспортном средстве раскрыт на ФИГ. 7В. Контроллер также может выполнять алгоритм на ФИГ. 8А совместно с алгоритмом на ФИГ. 3 для коррекции пределов шума, вибрации и резкости (ШВР) транспортного средства в условиях с перегрузкой двигателя при обнаружении отсутствия людей. Пример коррекции порогов ШВР перегрузки двигателя в зависимости от числа присутствующих в транспортном средстве людей проиллюстрирован на ФИГ. 8В. Контроллер также может выполнять алгоритм на ФИГ. 9 совместно с алгоритмом на ФИГ.З для коррекции графика переключения передач при обнаружении отсутствия людей. Например, когда присутствует один или более человек, контроллер может использовать первый график переключения передач, построенный в зависимости от номинальных ограничений по ШВР, для принятия решений о повышении и понижении передач; и, при обнаружении отсутствия людей в транспортном средстве, контроллер может использовать второй график переключения передач, построенный в зависимости от сниженных ограничений по ШВР, отдавая предпочтение экономии топлива, а не ШВР. Контроллер также может выполнять алгоритм на ФИГ. 10 совместно с алгоритмом на ФИГ. 3 для регулирования работы с отсечкой топлива при замедлении (ОТЗ) при обнаружении отсутствия людей. Например, при отсутствии людей, диапазон применения ОТЗ можно расширить для повышения экономии топлива. В одном примере, если будет обнаружено отсутствие людей, вхождение в ОТЗ можно ускорить, а выход из ОТЗ - отсрочить, для повышения экономии топлива в ущерб ШВР. Кроме того, в некоторых примерах, можно отрегулировать включение и выключение муфты компрессора кондиционирования воздуха и/или работу соленоидного клапана насоса ВД для повышения экономии топлива, если будет обнаружено отсутствие людей. Температурную уставку кондиционирования воздуха также можно повысить, если будет обнаружено отсутствие людей, и понизить при приближении транспортного средства к месту приема пассажиров. Также следует понимать, что примеры, в которых вышеуказанные регулировки при обнаружении отсутствия людей можно осуществлять координировано друг другом, также входят в объем настоящего раскрытия.
ФИГ. 1А иллюстрирует пример движительной системы 100 транспортного средства. Движительная система 100 транспортного средства содержит двигатель 110 сгорания и мотор 120. Несмотря на то, что движительная система 100 транспортного средства на ФИГ. 1А представляет собой гибридную движительную систему, следует понимать, что раскрытые в настоящем описании варианты осуществления, в том числе - способы, раскрытые на примерах ФИГ. 3-10, также применимы к движительным системам транспортного средства, приводимым в действие только двигателем, и выполненным без возможности автономного вождения.
В качестве неограничивающего примера, двигатель 110 представляет собой двигатель внутреннего сгорания, а мотор 120 представляет собой электромотор. Мотор 120 может быть выполнен с возможностью использования или потребления энергии из источника, не являющегося двигателем 110. Например, двигатель 110 может потреблять жидкое топливо (например, бензин) для выработки выходной мощности двигателя, а мотор 120 может потреблять электроэнергию для выработки выходной мощности мотора. Следовательно, транспортное средство с движительной системой 100 может именоваться «гибридно-электрическое транспортное средство» (ГЭТС).
Движительная система 100 транспортного средства выполнена с возможностью функционирования в различных режимах в зависимости условий, в которых ей приходится работать. В некоторых из этих условий двигатель 110 может оставаться в заглушенном (т.е. отключенном) состоянии, в котором сжигание топлива в двигателе прекращено. Например, в определенных рабочих условиях, когда двигатель 110 отключен, мотор 120 может приводить транспортное средство в движение посредством ведущего колеса 130, как показано стрелкой 123.
В других рабочих условиях, двигатель 110 можно отключать (как указано выше), а мотор 120 можно эксплуатировать для зарядки устройства 150 аккумулирования энергии. Например, мотор 120 выполнен с возможностью приема крутящего момента от ведущего колеса 130, как показано стрелкой 122, и преобразования кинетической энергии транспортного средства в электрическую энергию для аккумулирования в устройстве 150 аккумулирования энергии, как показано стрелкой 124. Данная операция может носить название «рекуперативное торможение транспортного средства». Таким образом, в некоторых вариантах осуществления мотор 120 может функционировать как генератор. При этом в других вариантах крутящий момент от ведущего колеса 130 вместо него может принимать генератор 160, при этом генератор может преобразовывать кинетическую энергию транспортного средства в электроэнергию для аккумулирования в устройстве 150 аккумулирования энергии, как показано стрелкой 162.
В других рабочих условиях двигатель 110 может работать за счет сжигания топлива, полученного из топливной системы 140, как показано стрелкой 142. Например, двигатель 110 можно эксплуатировать для приведения транспортного средства в движение посредством ведущего колеса 130, как показано стрелкой 121, в то время как мотор 120 отключен. В других рабочих условиях, для приведения транспортного средства в движение посредством ведущего колеса 130 может работать как двигатель 110, так и мотор 120, как показано стрелками 121 и 123 соответственно. Схема, при которой двигатель и мотор могут выборочно приводить транспортное средство в движение, может именоваться «параллельная схема движительной системы транспортного средства». Следует отметить, что в некоторых вариантах осуществления мотор 120 может приводить транспортное средство в движение через первую группу ведущих колес, а двигатель 110 - через вторую группу ведущих колес.
В других вариантах осуществления схема движительной системы 100 транспортного средства может быть последовательной, в которой двигатель не приводит ведущие колеса в движение непосредственно. Вместо этого двигатель 110 можно эксплуатировать для питания мотора 120, который, в свою очередь, может приводить транспортное средство в движение посредством ведущего колеса 130, как показано стрелкой 122. Например, в определенных рабочих условиях, двигатель 110 может приводить в действие генератор 160, как показано стрелкой 116, который, в свою очередь, может подавать электроэнергию мотору 120, как показано стрелкой 141, и (или) устройству 150 аккумулирования энергии, как показано стрелкой 162. В качестве другого примера, двигатель 110 можно эксплуатировать для приведения в действие мотора 120, который, в свою очередь, может функционировать как генератор для преобразования выходной мощности двигателя в электроэнергию, при этом электроэнергию можно аккумулировать в устройстве 150 аккумулирования энергии для последующего потребления мотором.
Топливная система 140 может содержать один или более топливных баков 143 для хранения топлива в транспортном средстве. Например, в топливном баке 143 можно хранить одно или более жидких топлив, включая, помимо прочих, бензин, дизельное топливо и спиртосодержащие топлива. В некоторых примерах топливо можно хранить в транспортном средстве в виде смеси одного или более разных топлив. Например, топливный бак 143 может быть выполнен с возможностью содержать смесь бензина и этанола (например, Е10, Е85 и т.п.) или смесь бензина и метанола (например, М10, М85 и т.п.), причем эти топлива или смеси можно подавать в двигатель 110, как показано стрелкой 142. В двигатель 110 также можно подавать и другие подходящие топлива или топливные смеси для их сжигания в двигателе с целью выработки мощности. Выходную мощность двигателя можно использовать для приведения транспортного средства в движение, как показано стрелкой 121, или для зарядки устройства 150 аккумулирования энергии посредством мотора 120 или генератора 160.
В некоторых вариантах осуществления устройство 150 аккумулирования энергии может быть выполнено с возможностью аккумулирования электроэнергии для питания других потребителей электроэнергии в составе транспортного средства (помимо мотора), включая системы обогрева и кондиционирования воздуха в салоне, пуска двигателя, фары, аудио- и видеосистемы салона и т.п. В качестве неограничивающего примера, устройство 150 аккумулирования энергии может содержать одну или более батарей и/или конденсаторов.
Движительная система 100 транспортного средства может включать в себя систему отопления, вентиляции и кондиционирования воздуха (ОВКВ) (не показана). Система ОВКВ может содержать испаритель для охлаждения воздуха салона транспортного средства. Воздух можно пропускать над испарителем посредством вентилятора и направлять по салону транспортного средства. Климатический контроллер (не показан) выполнен с возможностью управления вентилятором в соответствии с операторскими настройками (полученными через операторский интерфейс), а также показаниями климатических датчиков. Климатический контроллер также может управлять вентилятором в зависимости от числа присутствующих людей, обнаруженных в транспортном средстве. Датчик температуры испарителя (не показан) выполнен с возможностью выдачи показания температуры испарителя климатическому контроллеру. Датчик температуры в салоне выполнен с возможностью выдачи показания температуры в салоне климатическому контроллеру. Климатический контроллер также может принимать входные сигналы оператора от операторского интерфейса и направлять данные о желаемой температуре испарителя и фактической температуре испарителя в систему 190 управления. Операторский интерфейс позволяет оператору выбирать желаемую температуру в салоне, скорость вентилятора и путь распределения кондиционированного воздуха в салоне. В одном примере, при обнаружении отсутствия людей в транспортном средстве, контроллер системы 190 управления может повышать и понижать уставку желаемого кондиционирования воздуха при приближении к месту приема пассажиров (например, когда расстояние до места приема пассажиров меньше порогового).
Система 190 управления выполнена с возможностью связи с двигателем 110, и/или мотором 120, и/или топливной системой 140, и/или устройством 150 аккумулирования энергии, и/или генератором 160. Например, система 190 управления может получать данные сенсорной обратной связи от двигателя 110, и/или мотора 120, и/или топливной системы 140, и/или устройства 150 аккумулирования энергии, и/или генератора 160. Система 190 управления также может направлять управляющие сигналы двигателю 110, и/или мотору 120, и/или топливной системе 140, и/или устройству 150 аккумулирования энергии, и/или генератору 160 в ответ на данные сенсорной обратной связи. Система 190 управления может получать показание запрашиваемой оператором отдачи движительной системы транспортного средства от оператора 102 транспортного средства. Например, система 190 управления может получать данные сенсорной обратной связи от датчика 194 положения педали, выполненного с возможностью связи с педалью 192. «Педаль 192» может условно обозначать тормозную педаль и/или педаль акселератора. В некоторых примерах система 190 управления также выполнена с возможностью связи с приемным (или передающим) устройством 195 дистанционного пуска двигателя, принимающим радиосигналы 106 от брелока-контроллера 111 с кнопкой 105 дистанционного пуска. В других примерах (не показаны), дистанционный пуск двигателя можно инициировать посредством системы на основе сотового телефона или смартфона, в которой сотовый телефон пользователя направляет данные серверу, а сервер осуществляет связь с транспортным средством для пуска двигателя.
Система 190 управления также может включать в себя модуль 191 автономного вождения, содержащий инструкции для автономной и/или полуавтономной, то есть полностью или частично без воздействия оператора, работы движительной системы 100 транспортного средства. Движительная система 100 транспортного средства может также содержать датчики 193 автономного вождения и автономный контроллер в составе указанного модуля, принимающий сигналы, генерируемые датчиками автономного вождения (например, датчиками для вождения транспортного средства в автономном режиме) и управляющий как минимум одной подсистемой транспортного средства для эксплуатации транспортного средства в автономном режиме в соответствии с полученными сигналами. В число автономных датчиков 193 может входить любое количество устройств, выполненных с возможностью генерирования сигналов, содействующих управлению движительной системой 100 транспортного средства во время работы в автономном режиме. Примерами автономных датчиков 193 могут служить радарный датчик, лидарный датчик, съемочная камера и т.п. Благодаря автономным датчикам 193, движительная система 100 транспортного средства может «видеть» проезжую часть и/или различные препятствия во время работы в автономном режиме.
Контроллер автономного режима может быть выполнен с возможностью управления одной или более подсистемами во время работы движительной системы транспортного средства в автономном режиме. В число примеров подсистем, которыми может управлять контроллер автономного режима, могут входить: тормозная подсистема, подсистема подвески, подсистема рулевого управления, подсистема ОВКВ и подсистема силового агрегата. Контроллер автономного режима может управлять любой или более из этих подсистем путем выдачи сигналов управления узлами, относящимися к этим подсистемам.
Устройство 150 аккумулирования энергии может периодически получать электроэнергию от источника 180 питания, расположенного за пределами транспортного средства (например, не входящего в состав транспортного средства), как показано стрелкой 184. В качестве неограничивающего примера, транспортное средство, содержащее движительную систему 100, может быть выполнено как подключаемое к сети гибридно-электрическое транспортное средство (ПСГЭТС), в котором электроэнергия может поступать в устройство 150 аккумулирования энергии из источника 180 питания по кабелю 182 электропередачи. Во время зарядки устройства 150 аккумулирования энергии от источника 180 питания, кабель 182 электропередачи может создавать электрическое соединение между устройством 150 аккумулирования энергии и источником 180 питания. Когда движительная система транспортного средства работает для приведения транспортного средства в движение, кабель 182 электропередачи между источником 180 питания и устройством 150 аккумулирования энергии может быть отключен. Система 190 управления может определять и/или регулировать количество электроэнергии в устройстве аккумулирования энергии, которое может именоваться «степень заряженности» (СЗ).
В других вариантах осуществления кабель 182 электропередачи может отсутствовать, при этом устройство 150 аккумулирования энергии может получать электроэнергию от источника 180 питания беспроводным способом. Например, устройство 150 аккумулирования энергии может быть выполнено с возможностью получения электроэнергии от источника 180 питания одним или более из следующих способов: электромагнитная индукция, радиоволны и электромагнитный резонанс. В связи с этим следует понимать, что для зарядки устройства 150 аккумулирования энергии от источника питания, не входящего в состав транспортного средства, можно использовать любое подходящее решение. Таким образом, мотор 120 может приводить транспортное средство в движение, используя другой источник энергии помимо топлива, потребляемого двигателем 110.
Топливная система 140 выполнена с возможностью периодической заправки топливом из источника за пределами транспортного средства. В качестве неограничивающего примера, движительную систему 100 транспортного средства можно заправлять топливом через топливораздаточное устройство 170, как показано стрелкой 172. В некоторых вариантах осуществления топливный бак 143 может быть выполнен с возможностью хранения топлива, полученного из топливораздаточного устройства 170, до его подачи в двигатель 110 для сжигания. В некоторых вариантах система 190 управления выполнена с возможностью получения показания уровня топлива в топливном баке 143 от датчика уровня топлива. Оператор транспортного средства может получать данные об уровне топлива в топливном баке 143 (например, определенном датчиком уровня топлива) посредством указателя уровня топлива или индикатора на приборной панели 196 транспортного средства.
Движительная система 100 транспортного средства также может содержать датчик 198 температуры/влажности окружающей среды и датчики, предназначенные для указания состояния присутствия людей в транспортном средстве, например, тензодатчики 107 сидений, датчики 108 дверей и бортовые съемочные камеры 109. В некоторых примерах, в число датчиков, предназначенных для указания состояния присутствия людей в транспортном средстве могут входить один или более из следующих: тепловизионная система, содержащая инфракрасную съемочную камеру, и система датчиков сидений, содержащая один или более датчиков давления сидений, соединенных с каждым из сидений транспортного средства. Движительная система 100 транспортного средства также может содержать датчики 199 ускорений. В число датчиков ускорений могут входить один или более из следующих: датчики продольного, поперечного, вертикального ускорения, датчики поворота вокруг вертикальной, продольной и поперечной оси. Приборная панель 196 транспортного средства может содержать индикаторную лампу (лампы) и/или текстовый дисплей с возможностью отображения сообщений для оператора. Приборная панель 196 транспортного средства также может содержать различные вводные компоненты для приема входных сигналов от оператора, например, кнопки, сенсорные экраны, устройства голосового ввода/распознавания и т.п. Например, приборная панель 196 транспортного средства может содержать кнопку 197 дозаправки с возможностью ручного приведения в действие или нажатия оператором транспортного средства для запуска дозаправки. Например, при приведении оператором транспортного средства в действие кнопки 197 дозаправки, из топливного бака в транспортном средстве может быть сброшено давление, чтобы можно было выполнить дозаправку.
В другом варианте приборная панель 196 транспортного средства выполнена с возможностью передачи аудиосообщений оператору без помощи дисплея. В число датчиков 199 может входить датчик вертикальных ускорений для указания неровности дороги. Эти устройства могут быть связаны с системой 190 управления. В одном примере система управления может регулировать выходную мощность двигателя и/или колесные тормоза для повышения устойчивости транспортного средства в зависимости от сигналов датчика (датчиков) 199.
В некоторых вариантах приборная панель 196 транспортного средства также может содержать интерфейс для выбора предпочтительного для присутствующего человека режима работы транспортного средства. Например, присутствующий пассажир и/или водитель транспортного средства может выбирать, чему отдать предпочтение - экономии топлива или ШВР. А именно, если пассажир или водитель выбирает первый режим, в котором предпочтение отдают экономии топлива, а не уменьшению ШВР, блок 190 управления может снизить ограничения по ШВР и отрегулировать одно или более исполнительных устройств транспортного средства для регулирования работы транспортного средства для повышения экономии топлива. Если пассажир или водитель выберет второй режим, в котором предпочтение отдают уменьшению ШВР, а не экономии топлива, блок 190 управления может применить номинальные ограничения по ШВР и отрегулировать одно или более исполнительных устройств транспортного средства для регулирования работы транспортного средства для улучшения дорожных качеств. В некоторых примерах могут быть применены более строгие ограничения по ШВР (например, превышающие номинальные), если присутствующий пассажир или водитель выберет второй режим, в котором предпочтение отдают уменьшению ШВР, а не экономии топлива.
Кроме того, блок 190 управления может регулировать работу транспортного средства в зависимости от числа присутствующих в транспортном средстве людей, как раскрыто ниже на примере ФИГ. 3-10. А именно, при обнаружении отсутствия людей в транспортном средстве (по показаниям датчиков 107, 108 и 109, указывающих состояние присутствия людей в транспортном средстве), блок 190 управления может отрегулировать один или более параметров работы транспортного средства для изменения баланса между экономией топлива и ШВР в пользу повышения экономии топлива, а не дорожных качеств. Например, если будет обнаружено отсутствие людей, ограничения по ШВР перестают действовать. Поэтому, при отсутствии людей, работу транспортного средства можно отрегулировать для повышения экономии топлива в ущерб ШВР, так как воздействие ШВР не вызовет недовольство присутствующих людей. Таким образом, на основании информации об отсутствии людей, блок управления может отрегулировать работу транспортного средства так, чтобы она допускала возбуждения ШВР от силового агрегата транспортного средства и обеспечивала повышение экономии топлива. Регулирование одного или более параметров работы транспортного средства при отсутствии людей будут подробнее раскрыто ниже на примере ФИГ. 3-10. Раскрытые в настоящем описании способы и системы обеспечивают достижение технического результата, состоящего в повышении экономии топлива за счет снижения ограничений по ШВР при отсутствии людей в транспортном средстве.
ФИГ. 1В представляет собой принципиальную схему, изображающую один из цилиндров многоцилиндрового двигателя 10 в системе 125 двигателя, могущей входить в состав движительной системы транспортного средства, например, движительной системы 100 транспортного средства на ФИГ. 1А. Двигатель 10 может представлять собой пример двигателя 110 на ФИГ. 1А. Двигателем 10 можно как минимум частично управлять с помощью системы управления, содержащей контроллер 12, и входных сигналов оператора 132 транспортного средства через устройство 131 ввода. В данном примере устройство 131 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали.
В некоторых вариантах, в автономном режиме работы транспортного средства двигателем 10 может как минимум частично управлять система управления посредством инструкций в памяти контроллера 12 (или же в автономном режиме двигателем может управлять автономный контроллер (не показан)) и входных сигналов от одного или более автономных датчиков 189. В число примеров автономных датчиков 189 могут входить радарный датчик, лидарный датчик, съемочная камера и т.п.
Камера 30 сгорания двигателя 10 может представлять собой цилиндр, образованный стенками 32 цилиндра с расположенным между ними поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращение коленчатого вала. Коленчатый вал 40 может быть соединен с как минимум одним ведущим колесом транспортного средства через промежуточную систему трансмиссии. Кроме того, для обеспечения пуска двигателя 10, с коленчатым валом 40 может быть связан стартер через маховик.
Всасываемый воздух может поступать в камеру 30 сгорания из впускного коллектора 144 через заборный канал 42, а отработавшие газы могут выходить через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут избирательно сообщаться с камерой 30 сгорания через впускной клапан 52 и выпускной клапан 54 соответственно. В некоторых примерах камера 30 сгорания может содержать два и более впускных клапана и/или два и более выпускных клапана.
В данном примере впускным клапаном 52 и выпускным клапаном 54 могут управлять системы 51 и 53 кулачкового привода соответственно. Системы 51 и 53 кулачкового привода могут содержать один или более кулачков и могут быть выполнены с возможностью выполнения одной или более из следующих функций: переключение профиля кулачков (ППК), изменение фаз кулачкового распределения (ИФКР), изменение фаз газораспределения (ИФГ) и/или изменение высоты подъема клапанов (ИВПК), которыми может управлять контроллер 12 для регулирования работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 можно определять с помощью датчиков 55 и 57 положения соответственно. В других примерах впускной клапан 52 и/или выпускной клапан 54 могут быть электроприводными. Например, в другом варианте цилиндр 30 может содержать впускной клапан с электроприводом и выпускной клапан с кулачковым приводом, включая системы ППК и/или ИФКР.
Топливная форсунка 69 показана соединенной непосредственно с камерой 30 сгорания для впрыска топлива непосредственно в нее пропорционально длительности импульса сигнала, полученного от контроллера 12. Так топливная форсунка 69 обеспечивает известный из уровня техники непосредственный впрыск топлива в камеру 30 сгорания. Топливная форсунка может быть установлена, например, на боковой стороне или сверху от камеры сгорания. Топливо может поступать в топливную форсунку 69 по топливной системе (не показана), содержащей топливный бак, топливный насос и топливную рампу. В некоторых примерах камера 30 сгорания, вместо указанной форсунки или в дополнение к ней, может содержать топливную форсунку, установленную во впускном коллекторе 44 с возможностью известного из уровня техники впрыска топлива во впускной канал выше по потоку от камеры 30 сгорания.
Искру зажигания подают в камеру 30 сгорания с помощи свечи 66 зажигания. Система зажигания может дополнительно содержать катушку зажигания (не показана) для увеличения подачи напряжения на свечу 66 зажигания. В других вариантах, например, в дизельном двигателе, свеча 66 зажигания может отсутствовать.
Двигатель 10 может работать в различных режимах. Например, контроллер 12 может отключать различное число цилиндров, например, один цилиндр или множество цилиндров, и эксплуатировать двигатель с цилиндрами, остающимися включенными. В варианте на ФИГ. 2, системы приводов для впускных клапанов 52 и выпускных клапанов 54, речь о которых шла выше, выполнены с возможностью регулирования открытия и закрытия клапанов, за счет которых можно обеспечить работу в одном или более режимах с уменьшенным рабочим объемом, в которых один или более цилиндров отключены и не сжигают топливо. В контексте настоящего описания, режим с уменьшенным рабочим объемом представляет собой режим работы двигателя, в котором один или более цилиндров, будучи отключенными, не сжигают топливо для приведения в действие коленчатого вала. В режимах с уменьшенным рабочим объемом или с отключением цилиндров один или более цилиндров могут быть отключены путем изменения или блокирования работы впускных клапанов, выпускных клапанов, или и тех, и других в какой-либо комбинации, с отсечкой подачи топлива в отключенные цилиндры.
Заборный канал 42 может содержать дроссель 62 с дроссельной заслонкой 64. В данном конкретном примере положение дроссельной заслонки 64 может изменять контроллер 12, направляя сигнал на электромотор или привод в составе дросселя 62; данную конфигурацию обычно называют «электронное управление дроссельной заслонкой» (ЭУДЗ). Таким образом, дроссель 62 выполнен с возможностью регулирования подачи всасываемого воздуха в камеру 30 сгорания среди прочих цилиндров двигателя. Контроллер 12 может получать информацию о положении дроссельной заслонки 64 в виде сигнала положения дросселя. Заборный канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для определения количества воздуха, поступающего в двигатель 10.
Датчик 126 отработавших газов показан соединенным с выпускным каналом 48 выше по потоку от устройства 70 снижения токсичности выбросов по направлению потока отработавших газов. Датчик 126 может представлять собой любой датчик, подходящий для определения воздушно-топливного отношения отработавших газов, например, линейный датчик кислорода или УДКОГ (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или ДКОГ, НДКОГ (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. В одном примере верхний по потоку датчик 126 отработавших газов представляет собой УДКОГ, выполненный с возможностью выдачи выходного сигнала, например, сигнала напряжения, пропорционального количеству кислорода в отработавших газах. Контроллер 12 преобразует выходной сигнал датчика кислорода в воздушно-топливное отношение отработавших газов посредством функции преобразования для датчика кислорода.
Устройство 70 снижения токсичности выбросов показано расположенным вдоль выпускного канала 48 ниже по потоку от датчика 126 отработавших газов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), улавливатель оксидов азота, различные другие устройства снижения токсичности выбросов или их комбинацию. В некоторых примерах, во время работы двигателя 10, устройство 70 снижения токсичности выбросов можно периодически регенерировать за счет эксплуатации как минимум одного цилиндра двигателя в пределах определенного воздушно-топливного отношения.
Система 139 рециркуляции отработавших газов (РОГ) выполнена с возможностью направления желаемой части отработавших газов из выпускного канала 48 во впускной коллектор 44 по магистрали 152 РОГ. Количество газов РОГ, подаваемых во впускной коллектор 44, может изменять контроллер 12 посредством клапана 144 РОГ. В некоторых условиях посредством системы 139 РОГ можно регулировать температуру топливовоздушной смеси в камере сгорания, тем самым обеспечивая способ регулирования момента зажигания в некоторых режимах сгорания.
Контроллер 12 показан на ФИГ. 2 в виде микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронный носитель информации для исполняемых программ и калибровочных значений, в данном примере показанный в виде однокристального запоминающего устройства 106, (например, долговременную память), оперативное запоминающее устройство 113, энергонезависимое запоминающее устройство 115 и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от соединенных с двигателем 10 датчиков, в том числе: показание массового расхода всасываемого воздуха (МРВ) отдатчика 129 массового расхода воздуха; показание температуры охлаждающей жидкости двигателя (ТОЖД) от датчика 112 температуры, соединенного с рубашкой 114 охлаждения; сигнал положения двигателя от датчика 118 на эффекте Холла (или датчика иного типа), соединенного с коленчатым валом 40; положения дросселя от датчика 65 положения дросселя; и сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя может быть сгенерирован контроллером 12 из сигнала датчика 118 положения коленчатого вала. Сигнал давления в коллекторе также представляет собой показание разряжения или давления во впускном коллекторе 44. Следует отметить, что возможно использование различных комбинаций вышеуказанных датчиков, например, датчика МРВ без датчика ДВК или наоборот. Во время работы двигателя значение крутящего момента двигателя можно вывести из показания датчика 122 ДВК и частоты вращения двигателя. Кроме того, этот датчик, помимо замера частоты вращения двигателя, можно использовать для оценки заряда (включая воздух), поданного в цилиндр. В одном примере датчик 118 положения коленчатого вала, также используемый как датчик частоты вращения двигателя, может генерировать заданное количество импульсов с равными промежутками при каждом обороте коленчатого вала.
В носитель информации - постоянное запоминающее устройство 106 - могут быть введены машиночитаемые данные, представляющие собой инструкции в долговременной памяти, исполняемые микропроцессором 102 для выполнения раскрытых в настоящем описании способов, а также других предполагаемых, но конкретно не перечисленных вариантов.
Во время работы любой из цилиндров двигателя 10, как правило, проходит четырехтактный цикл, включающий в себя: такт впуска, такт сжатия, рабочий такт и такт выпуска. Во время такта впуска обычно происходит закрытие выпускного клапана 54 и открытие впускного клапана 52. Воздух подают в камеру 30 сгорания через впускной коллектор 44, и поршень 36 движется к нижней части цилиндра для увеличения объема внутри камеры 30 сгорания. Специалисты в данной области техники обычно называют положение, в котором поршень 36 находится вблизи днища цилиндра и в конце своего хода (например, когда камера 30 сгорания достигает максимального объема), нижней мертвой точкой (НМТ).
Во время такта сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 движется к головке блока цилиндров для сжатия воздуха в камере 30 сгорания. Специалисты в данной области техники обычно называют положение, в котором поршень 36 находится в конце своего хода и наиболее близко к головке блока цилиндров (например, когда камера 30 сгорания достигает своего минимального объема), верхней мертвой точкой (ВМТ). В процессе, в настоящем описании именуемом «впрыск», в камеру сгорания подают топливо. В процессе, в настоящем описании именуемом «зажигание», впрыснутое топливо зажигают, используя такое известное из уровня техники средство, как свеча 92 зажигания, в результате чего происходит сгорание.
Во время рабочего такта расширяющиеся газы вытесняют поршень 36 назад к НМТ. Коленчатый вал 40 преобразует движение поршня в момент вращения вращающегося вала. И наконец, во время такта выпуска, выпускной клапан 54 открывают для выпуска продуктов сгорания топливовоздушной смеси в выпускной коллектор 48, и поршень возвращается в ВМТ. Следует учесть, что вышеизложенное описание служит исключительно для примера, и что моменты открытия и/или закрытия впускного и выпускного клапанов можно изменять для создания положительного или отрицательного перекрытия клапанов, позднего закрытия впускного клапана или различных других примеров.
В некоторых вариантах, в автономном режиме работы транспортного средства двигателем 10 может автономно управлять контроллер 12 в зависимости от сигналов, получаемых от автономных датчиков, например, автономных датчиков, речь о которых шла в описании ФИГ. 1А. В некоторых примерах в автономном режиме работой двигателя может управлять автономный контроллер в составе модуля управления.
Как сказано выше, на ФИГ. 1В показан только один цилиндр многоцилиндрового двигателя, при этом любой его цилиндр может также содержать собственный комплект впускных /выпускных клапанов, топливную форсунку, свечу зажигания и т.п.
Специалистам в данной области техники будет понятно, что конкретные алгоритмы, раскрытые ниже на блок-схемах, могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Хотя это явно и не описано, одно или более из иллюстрируемых действий, операций и/или функций могут выполняться неоднократно в зависимости от конкретной применяемой стратегии. Кроме того, фигуры чертежа графически изображают код, программируемый в машиночитаемом носителе данных в контроллере 12, для выполнения контроллером во взаимодействии с аппаратными средствами двигателя, проиллюстрированными на ФИГ. 1В.
ФИГ. 2 представляет собой блок-схему системы 200 привода транспортного средства. Систему 200 привода может приводить в действие двигатель 10. Двигатель 10 раскрыт на примере ФИГ. 1В. Система 200 привода может входить в состав движительной системы транспортного средства, например, движительной системы 100 транспортного средства на ФИГ. 1А. В одном примере двигатель 10 может быть бензиновым. В других примерах может быть задействован двигатель другой конфигурации, например, дизельный. Двигатель 10 можно запускать с помощью системы пуска двигателя (не показана). Кроме того, двигатель 10 может создавать крутящий момент или регулировать его посредством исполнительного устройства 204 создания крутящего момента, например, топливной форсунки, дросселя и т.п.
Отдаваемый двигателем крутящий момент может быть передан гидротрансформатору 206 для приведения в действие автоматической трансмиссии 208 путем ввода в зацепление одной или более муфт, в том числе муфты 210 переднего хода, при этом гидротрансформатор можно считать компонентом трансмиссии. Гидротрансформатор 206 содержит насосное колесо 220, передающее крутящий момент турбинному колесу 222 посредством гидравлической жидкости. Путем ввода в зацепление одной или более муфт можно изменять передаточное отношение между колесами 214 транспортного средства. Частоту вращения насосного колеса можно определять с помощью датчика 225 частоты вращения, а частоту вращения турбинного колеса - с помощью датчика 226 частоты вращения или спидометра 230 транспортного средства. Момент на выходе гидротрансформатора можно, в свою очередь, регулировать с помощью блокировочной муфты 212 гидротрансформатора. Когда блокировочная муфта 212 гидротрансформатора полностью расцеплена, гидротрансформатор 206 передает крутящий момент автоматической трансмиссии 208 путем передачи жидкости между турбинным колесом и насосным колесом гидротрансформатора, обеспечивая тем самым мультипликацию крутящего момента. В противном случае, когда блокировочная муфта 212 гидротрансформатора находится в полном зацеплении, происходит передача отдаваемого двигателем крутящего момента непосредственно через муфту гидротрансформатора ведущему валу (не показан) трансмиссии 208. Или же блокировочную муфту 212 гидротрансформатора можно вводить в частичное зацепление, что позволяет регулировать величину крутящего момента, передаваемого трансмиссии. Несмотря на то, что показана только одна блокировочная муфта 212, гидротрансформатор 206 также может содержать несколько блокировочных муфт. Блокировочная муфта 212 может представлять собой муфты разных типов (например, фрикционную муфту мокрого типа), обеспечивающих возможность различных условий зацепления между насосным колесом 220 и турбинным колесом 222, например, за счет разных степеней проскальзывания между насосным колесом 220 и турбинным колесом 222. Блокировочная муфта выполнена с возможностью электронного управления посредством электромеханического привода, электрогидравлического привода и т.п.
Как раскрыто на примере ФИГ. 1В, двигателем 10 может управлять контроллер 12. Контроллер 12 может быть выполнен с возможностью регулирования величины крутящего момента, передаваемого гидротрансформатором, регулируя состояние блокировочной муфты гидротрансформатора в зависимости от различных параметров работы двигателя или по запросу водителя на совершение действий с двигателем. Контроллер 12 также может управлять работой блокировочной муфты 212 посредством привода блокировочной муфты (не показан). Например, контроллер 12 может определить рабочее состояние транспортного средства (например, посредством различных датчиков и исполнительных устройств, в том числе - раскрытых на примерах ФИГ. 1А и 1В), вычислить целевое давление зацепления блокировочной муфты, соответствующее целевому состоянию зацепления для насосного колеса 220 и турбинного колеса 222, а затем направлять сигналы приводу блокировочной муфты для приложения блокировочной муфтой 212 целевого давления зацепления к насосному колесу 220 и турбинному колесу 222.
Состояние зацепления между насосным колесом 220 и турбинным колесом 222 может зависеть от прилагаемого давления зацепления блокировочной муфты. Например, если давление зацепления (PEN) не ниже порогового значения (РА), или

Например, проскальзывание величиной 0% имеет место, когда насосное колесо 220 и турбинное колесо 222 находятся в полном зацеплении и движутся как одно целое. Проскальзывание величиной 100% указывает на наличие соединения полностью по текучей среде и отсутствие механического зацепления между насосным колесом 220 и турбинным колесом 222. Проскальзывание величиной в промежутке от 0 до 100% указывает на наличие частичного механического зацепления между насосным колесом и турбинным колесом и некоторого проскальзывания между ними. Чем меньше проскальзывание, тем больше зацепление между насосным колесом 220 и турбинным колесом 222.
Крутящий момент на выходе автоматической трансмиссии 208 можно, в свою очередь, передавать колесам 214 для приведения транспортного средства в движение. А именно, автоматическая трансмиссия 208 может регулировать подводимый крутящий момент на ведущем валу (не показан) в зависимости от режима езды транспортного средства перед передачей отдаваемого крутящего момента колесам.
Колеса 214 можно блокировать путем включения колесных тормозов 216. В одном примере колесные тормоза 216 можно включить при нажатии водителем тормозной педали (не показана). Аналогичным образом, колеса 214 можно разблокировать, выключив колесные тормоза 216, когда водитель отпустит тормозную педаль. В автономном режиме работы двигателя, включение и выключение тормозов может происходить в зависимости от показаний одного или более автономных датчиков.
Механический масляный насос (не показан) может быть связан по текучей среде с автоматической трансмиссией 208 для создания давления в гидравлической системе, необходимого для ввода в зацепление различных муфт, например, муфты 210 переднего хода и/или блокировочной муфты 212 гидротрансформатора. Механический масляный насос может работать синхронно с гидротрансформатором 206 с возможностью приведения в действие, например, вращением двигателя или ведущего вала трансмиссии. Поэтому давление в гидравлической системе, создаваемое механическим масляным насосом, может возрастать при увеличении частоты вращения двигателя и падать при уменьшении частоты вращения двигателя.
В одном примере работу гидротрансформатора можно регулировать в зависимости числа присутствующих людей, обнаруженных в транспортном средстве. Например, при обнаружении отсутствия людей в транспортном средстве, контроллер может применять сниженные ограничения по ШВР для повышения экономии топлива, так как значимость ШВР стала меньше. Соответственно, контроллер может отрегулировать проскальзывание гидротрансформатора в сторону уменьшения. В некоторых примерах, контроллер может использовать табулированную зависимость, в основе которой лежат сниженные ограничения по ШВР, для определения желаемого проскальзывания гидротрансформатора и регулировать исполнительное устройство гидротрансформатора для создания желаемого проскальзывания. Для любой частоты вращения и нагрузки двигателя при отсутствии людей желаемое проскальзывание гидротрансформатора может быть меньше, чем когда присутствует один или более человек. Уменьшение проскальзывания гидротрансформатора при отсутствии людей позволяет повысить экономию топлива за счет уменьшения разрыва потока мощности во время преобразования, при этом могут возрасти ШВР из-за меньшего эффекта гашения. При этом значимость ШВР может быть меньше при отсутствии людей, и работу гидротрансформатора можно отрегулировать для повышения экономии топлива в ущерб ШВР. В некоторых примерах работу гидротрансформатора можно регулировать в зависимости от выбранной оператором настройки (или режима), отдающей предпочтение экономии топлива или ШВР. Степень уменьшения проскальзывания гидротрансформатора, зависящая от числа присутствующих людей, может быть больше степени уменьшения проскальзывания, зависящей от выбранного водителем режима, в котором предпочтение отдают экономии топлива, а не ШВР.
Таким образом, работу гидротрансформатора можно регулировать зависимости от числа присутствующих людей для создания больших преимуществ экономии топлива. Кроме того, можно регулировать различные рабочие состояния транспортного средства, например ОЦД, РОГ, ОТЗ, холостой ход и т.п., в зависимости числа присутствующих людей, обнаруженных в транспортном средстве. Регулирование различных рабочих условий транспортного средства в зависимости от числа присутствующих людей для повышения экономии топлива будет подробнее раскрыто ниже на примерах ФИГ. 3-10.
На ФИГ. 3 представлена блок-схема примера способа 300 для регулирования работы транспортного средства в зависимости от числа присутствующих в транспортном средстве людей. А именно, способ 300 предусматривает регулирование работы транспортного средства за счет снижения ограничений по ШВР для повышения экономии топлива, когда транспортное средство работает в автономном режиме, и в нем отсутствуют люди. Инструкции для реализации способа 300 и других включенных в настоящее описание способов может осуществлять контроллер системы транспортного средства, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей, в частности - для регулирования работы транспортного средства для повышения экономии топлива с одновременным снижением ограничений по ШВР при обнаружении отсутствия людей, согласно раскрытым ниже способам.
Выполнение способа 300 начинают на шаге 302. На шаге 302 способ 300 предусматривает оценку параметров работы транспортного средства. В число параметров работы транспортного средства могут входить: режим работы транспортного средства (например, автономный, полуавтономный или управления оператором), число присутствующих в транспортном средстве людей, параметры окружающей среды, параметры работы двигателя, параметры отопления, вентиляции и кондиционирования воздуха (ОВКВ) и параметры работы топливной системы. В число параметров работы двигателя могут входить: нагрузка двигателя, частота вращения двигателя, режим работы двигателя (например, с ОЦД или без ОЦД), параметры рециркуляции отработавших газов, величина прохода дроссельной заслонки, температура двигателя, момент зажигания, передаточное число в трансмиссии и температура каталитического нейтрализатора отработавших газов. В число параметров работы топливной системы могут входить: параметры дозаправки, давление в топливном баке, температура в топливном баке, параметры работы топливного насоса, параметры диагностики топливной системы и параметры системы улавливания топливных паров. В число параметров окружающей среды могут входить: влажность окружающей среды, температура окружающей среды и давление окружающей среды. В число параметров ОВКВ могут входить: состояние системы кондиционирования воздуха, напряжение на муфте кондиционера воздуха, скорость вентилятора конденсатора и температура в салоне. Оценка параметров работы транспортного средства также может включать в себя оценку состояния дороги во время работы транспортного средства. Состояние дороги может включать в себя неровность и уклон дороги. Параметры работы транспортного средства можно оценивать и/или измерять посредством одного или более датчиков системы транспортного средства, например, датчиков, раскрытых на примерах ФИГ. 1А, 1В и 2.
Далее способ 300 следует на шаг 304. На шаге 304 способ 300 предусматривает определение того, работает ли транспортное средство в автономном режиме. Если транспортное средство не работает в автономном режиме, ответ на шаге 304 будет "НЕТ", и способ 300 следует на шаг 310. На шаге 310 способ 300 предусматривает эксплуатацию транспортного средства в зависимости от номинальных ограничений по ШВР. Например, когда транспортное средство не работает в автономном режиме, работой транспортного средства управляет оператор транспортного средства. Поэтому один или более параметров работы транспортного средства можно отрегулировать так, чтобы уменьшить воздействие шума, вибрации и резкости, ощущаемых оператором или пассажирами в транспортном средстве, и улучшить дорожные качества.
Один или более параметров работы транспортного средства на шаге 312 могут включать в себя РОГ. Например, количество подаваемых газов РОГ может быть ограничено в зависимости от ограничений по ШВР. В одном примере в условиях холостого хода, когда действуют номинальные ограничения по ШВР, подачу газов РОГ можно не осуществлять (то есть желаемая РОГ может быть равна нулю) для уменьшения резкости на холостом ходу, когда двигатель работает с частотой вращения и нагрузкой холостого хода. В другом примере, когда действуют номинальные ограничения по ШВР, в условиях с неровной дорогой (то есть когда транспортное средство едет по неровной дороге), РОГ может быть блокирована для уменьшения ШВР и улучшения дорожных качеств. В еще одном примере, в транспортных средствах, оборудованных охладителем РОГ, когда действуют номинальные ограничения по ШВР, в условиях холодного пуска РОГ может быть блокирована на пороговый период после достижения температуры активации до тех пор, пока не будет достигнута желаемая температура охладителя РОГ. Отсрочка РОГ после активации каталитического нейтрализатора уменьшает ШВР и повышает дорожные качества.
Далее, на шаге 314, можно отрегулировать работу на холостом ходу для уменьшения ШВР. Например, когда двигатель работает в условиях холостого хода, режим работы с ОЦД может быть блокирован, а величина запаздывания зажигания ограничена в зависимости от ограничений по ШВР.
Далее, на шаге 316, можно отрегулировать режим работы с ОЦД. Например, в условиях с ОЦД, число отключаемых цилиндров можно уменьшить для уменьшения ШВР. То есть число цилиндров, которые можно отключить в режиме ОЦД, может зависеть от номинальных ограничений по ШВР для улучшения дорожных качеств.
Далее, на шаге 318, способ 300 предусматривает регулирование величины проскальзывания гидротрансформатора. Например, когда блокировочная муфта включена (режим блокировки), существует прямое соединение между двигателем и трансмиссией, что повышает КПД. При этом в режиме блокировки, из-за наличия механического соединения через блокировочную муфту, оператор и/или пассажиры в транспортном средстве ощущают шум и вибрацию системы привода. Для улучшения дорожных качеств, может быть допущено проскальзывание гидротрансформатора и, тем самым, увеличение соединения по текучей среде и уменьшение механического соединения. Соединение по текучей среде смягчает чувствительность вибрации системы привода, тем самым улучшая показатели ШВР. Величина проскальзывания может зависеть от резонанса системы привода для какой-либо частоты вращения двигателя. А именно, величину проскальзывания можно определять в зависимости от режима или графика проскальзывания гидротрансформатора в памяти контроллера. По этому графику можно определить желаемое проскальзывание гидротрансформатора, создающее желаемый эффект гашения для текущей нагрузки и частоты вращения двигателя. Затем контроллер может отрегулировать исполнительное устройство гидротрансформатора для создания желаемого проскальзывания.
Далее, на шаге 319, предел ШВР перегрузки двигателя может зависеть от номинальных ограничений по ШВР. Например, при относительно низких частотах вращения двигателя, если уменьшить проскальзывание гидротрансформатора ниже порогового (например, 30 об./мин или ниже), транспортное средство не сможет достичь желаемых целевых показателей ШВР для требуемых дорожных качеств. А именно, возможно возникновение режима ШВР, известного как «перегрузка двигателя», обусловленного импульсными подводами крутящего момента из-за создания высоких крутящих моментов при сгорании, причиной которых может быть запрашивание слишком большой величины крутящего момента при низких частотах вращения двигателя, когда передаточное число слишком высокое. С помощью гидротрансформатора можно регулировать ШВР, связанные с перегрузкой двигателя. А именно, проскальзывание гидротрансформатора увеличивает гашение колебаний. В результате, уменьшается чувствительность вибраций системы привода к возбуждению крутящего момента двигателя, что улучшает показатели ШВР. Таким образом, в условиях с перегрузкой двигателя транспортное средство можно эксплуатировать с проскальзыванием гидротрансформатора выше порогового для для достижения желаемого уровня ШВР и поддержания дорожных качеств. Иными словами, работу гидротрансформатора регулируют так, чтобы сохранить желаемые уровни ШВР во время перегрузки двигателя.
Далее, на шаге 320, показатели ШВР можно улучшить за счет графика переключения передач. Например, решения о повышении и понижении передач могут зависеть от максимального располагаемого крутящего момента в любой отдельно взятый момент времени для обеспечения хороших показателей дорожных качеств и ШВР.
Далее, на шаге 322, можно отрегулировать применение ОТЗ. А именно, можно отрегулировать вход в режим ОТЗ и выход из него. Например, когда условия для ОТЗ соблюдены, отключение топливных форсунок для всех цилиндров можно отсрочить. Кроме того, для улучшения показателей ШВР, включение топливных форсунок можно осуществить раньше в связи с отпусканием тормоза и превышением пороговой скорости транспортного средства. Кроме того, можно блокировать ОТЗ при работе на пониженной передаче и работе с приводом на все колеса.
Далее можно дополнительно отрегулировать работу соленоидного клапана насоса ВД для уменьшения ШВР при работе двигателя с низкой частотой вращения. Кроме того, в некоторых примерах можно дополнительно отрегулировать включение и выключение муфты компрессора кондиционирования воздуха для уменьшения ШВР. Если на шаге 304 будет установлено, что транспортное средство работает в автономном режиме, ответ на шаге 304 будет "ДА", и способ 300 следует на шаг 306. На шаге 306 способ 300 предусматривает определение того, является ли число присутствующих в транспортном средстве людей нулевым. Число присутствующих людей можно определять с помощью датчика давления сиденья, и/или инфракрасного датчика, и/или одной или более съемочных камер, обнаруживающих присутствие людей в транспортном средстве. Если число присутствующих в транспортном средстве людей больше нуля, способ 300 следует на шаг 310. На шаге 310 транспортное средство можно эксплуатировать для улучшения дорожных качеств, как раскрыто выше. Если число присутствующих в транспортном средстве людей равно нулю, способ 300 следует на шаг 308. На шаге 308 способ 300 предусматривает эксплуатацию транспортного средства с применением сниженных ограничений по ШВР для регулирования одного или более параметров работы транспортного средства для повышения экономии топлива. А именно, способ 300 предусматривает регулирование РОГ на шаге 326. Регулирование РОГ для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто ФИГ. 4. Далее, на шаге 328, способ 300 предусматривает регулирование работы на холостом ходу. Регулирование работы с частотой вращения холостого хода для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто на ФИГ. 5. Далее, на шаге 330, можно отрегулировать работу с ОЦД. Регулирование работы с ОЦД для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто на ФИГ.6А и 6В. Далее, на шаге 332, можно отрегулировать величину проскальзывания гидротрансформатора. Регулирование работы гидротрансформатора для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто на ФИГ. 7А и 7В. Далее, на шаге 333, можно скорректировать пределы перегрузки двигателя. Регулирование пределов перегрузки двигателя для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто на ФИГ. 8А и 8В. Далее, на шаге 334, можно отрегулировать переключение передач в трансмиссии. Регулирование графика переключения передач для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто на ФИГ. 9. Далее, на шаге 336, способ 300 предусматривает регулирование работы с ОТЗ. Регулирование работы с ОТЗ для повышения экономии топлива за счет снижения ограничений по ШВР будет подробно раскрыто на ФИГ. 10.
Таким образом, снижение ограничений по ШВР в условиях автономной работы транспортного средства при отсутствии в нем людей позволяет повысить экономию топлива.
В некоторых вариантах реализации проскальзывание муфты трансмиссии при переключении передач также можно применять и регулировать в зависимости от числа присутствующих людей. Например, проскальзывание муфты трансмиссии при переключении передач можно применять для создания у присутствующего человека ощущения более плавных переключений передач. При отсутствии людей, проскальзывание муфты трансмиссии можно уменьшить для повышения экономии топлива. Переключение муфты трансмиссии при переключении передач также можно применять вместо регулирования блокировочной муфты гидротрансформатора при переключении передач, раскрытого на примере ФИГ. 9, шаг 908, или в дополнение к нему.
В другом возможном варианте реализации, транспортными средствами с технологией «старт-стоп» можно управлять во время переходов между режимами остановки и пуска в зависимости от наличия или отсутствия людей. На время отсутствия людей можно запрограммировать более агрессивную остановку двигателя для повышения экономии топлива за счет более резких остановок и пусков. Например, для повышения экономии топлива скорость транспортного средства, при которой происходит глушение двигателя при остановке можно повысить на время отсутствия людей. Остановку двигателя (также именуемую «глушение двигателя») можно осуществлять путем выключения впрыска топлива и/или искры, например. Кроме того, в некоторых примерах, когда в транспортном средстве присутствует один или более человек, оператор транспортного средства может выбирать между эксплуатацией транспортного средства в первом режиме, в котором отдают предпочтение показателям ШВР и дорожным качествам, а не экономии топлива, или во втором режиме, в котором жертвуют показателями ШВР и дорожными качествами ради повышения экономии топлива. Оператор может выбрать первый режим или второй режим через водительский интерфейс. Получив входной сигнал от оператора, контроллер транспортного средства может отрегулировать работу транспортного средства для улучшения показателей ШВР и дорожных качеств в ущерб экономии топлива или наоборот. Если будет выбран первый режим, один или более параметров работы транспортного средства можно отрегулировать для уменьшения воздействия шума, вибрации и резкости, ощущаемого оператором или пассажирами в транспортном средстве, и улучшения дорожных качеств. То есть, когда выбран первый режим, транспортное средство можно эксплуатировать, как раскрыто на примере шага 310. Если будет выбран второй режим, один или более параметров транспортного средства регулируют для повышения экономии топлива в ущерб показателям ШВР и дорожным качествам. То есть, когда выбран второй режим, транспортное средство можно эксплуатировать, как раскрыто на примере шага 308.
В некоторых примерах, если оператор выберет второй режим, один или более параметров транспортного средства можно отрегулировать в зависимости от сниженных ограничений по ШВР, при этом снижение ограничений по ШВР может быть меньше, чем на время отсутствия людей, так что дорожные качества серьезно не пострадают.
На ФИГ. 4 раскрыт пример способа 400 для регулирования РОГ во время автономной работы транспортного средства при отсутствии в нем людей. Способ 400 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 400 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 400 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей. В частности, контроллер может регулировать рециркуляцию отработавших газов путем регулирования положения клапана РОГ, например, клапана 144 РОГ на ФИГ. 1В, посредством привода клапана для повышения экономии топлива с одновременным снижением ограничений по ШВР при обнаружении отсутствия людей, согласно способу 400, раскрытому ниже.
Выполнение способа 400 начинают на шаге 402. На шаге 402 способ 400 предусматривает определение того, работает ли двигатель с включенной рециркуляцией отработавших газов. Например, определить то, что рециркуляция отработавших газов включена, можно по положению клапана рециркуляции отработавших газов (РОГ). Например, датчик положения клапана РОГ может выдавать показание положения клапана РОГ контроллеру. Если клапан РОГ закрыт, можно определить, что РОГ не включена, и способ 400 следует на шаг 410. Если клапан РОГ не закрыт, можно определить, что происходит подача газов РОГ в двигатель, и способ 400 следует на шаг 404. Положение клапана РОГ можно определять по показанию датчика положения клапана РОГ, соединенного с клапаном РОГ.
На шаге 404 способ 400 предусматривает увеличение подачи газов РОГ в двигатель в зависимости от сниженных ограничений по ШВР. Увеличение РОГ может включать в себя, на шаге 406, определение желаемой процентной доли газов РОГ во всасываемом воздухе в зависимости от частоты вращения и нагрузки двигателя и сниженных ограничений по ШВР. А именно, желаемая процентная доля газов РОГ во всасываемом воздухе может быть выше, когда ограничения по ШВР снижены по сравнению с установленными ограничениями по ШВР. То есть, желаемое разбавление газами РОГ выше, когда оно зависит от частоты вращения и нагрузки двигателя и сниженных ограничений по ШВР, чем когда оно зависит от частоты вращения и нагрузки двигателя и номинальных ограничений по ШВР. В одном примере можно использовать табулированную зависимость, устанавливающую соотношение параметров частоты вращения и нагрузки двигателя с желаемой процентной долей газов РОГ, для определения желаемой процентной доли газов РОГ. Табулированная зависимость может учитывать сниженные ограничения по ШВР. Например, контроллер может определять желаемую процентную долю газов РОГ путем вычисления по табулированной зависимости, входными параметрами которой являются частота вращения и нагрузка двигателя, а результатом -желаемая процентная доля газов РОГ.
Далее, в зависимости от желаемой процентной доли газов РОГ и массового расхода воздуха (МРВ) можно вычислить желаемый поток РОГ. Затем, на шаге 408, регулируют клапан РОГ в зависимости от желаемого потока РОГ для обеспечения желаемой процентной доли газов РОГ во всасываемом воздухе. Клапан РОГ можно регулировать посредством привода клапана по командам от контроллера. В одном примере, если газы РОГ подают в виде фиксированной процентной доли от всасываемого воздуха в некоем диапазоне частот вращения и нагрузок (в диапазоне частот вращения и нагрузок от низких до средних), фиксированная процентная доля от всасываемого воздуха может быть выше, когда ограничения по ШВР снижены, чем когда действуют номинальные ограничения по ШВР. В одном примере, когда подают переменное количество газов РОГ в зависимости от частоты вращения и нагрузки двигателя, желаемая процентная доля газов РОГ для какой-либо частоты вращения и нагрузки может быть выше, когда ограничения по ШВР снижены, чем когда действуют номинальные ограничения по ШВР.
После подачи желаемого количества газов РОГ, способ 400 может совершить возврат.
Если на шаге 402 будет подтверждено, что РОГ не включена, способ 400 следует на шаг 410. На шаге 410 способ 400 предусматривает определение того, нужна ли РОГ с учетом сниженных ограничений по ШВР. Например, в условиях холостого хода, когда действуют номинальные ограничения по ШВР, РОГ можно не осуществлять (то есть желаемое количество газов РОГ может быть нулевым) для уменьшения резкости на холостом ходу, когда двигатель работает с частотой вращения и нагрузкой холостого хода. При этом, когда в транспортном средстве отсутствуют люди, и происходит автономное вождение транспортного средства, ограничения по ШВР могут быть снижены, и можно осуществлять РОГ для повышения экономии топлива в условиях холостого хода. Процентная доля газов РОГ может не превышать первый порог, причем первый порог зависит от количества газов РОГ, могущего привести к заглоханию двигателя в условиях холостого хода. То есть количество газов РОГ, подаваемое в условиях холостого хода, может быть больше нуля, но меньше первого порога, что позволяет обеспечить преимущества в части экономии топлива и выбросов, не приводя к заглоханию двигателя или значительной неустойчивости горения. В другом примере, когда действуют номинальные ограничения по ШВР, в условиях неровной дороги (то есть когда транспортное средство едет по неровной дороге), РОГ может быть блокирована для уменьшения ШВР и улучшения дорожных качеств. При этом, при отсутствии пассажиров, ограничения по ШВР могут быть ослаблены. Соответственно, когда транспортное средство едет по неровной дороге, РОГ может не быть блокирована, а желаемая процентная доля газов РОГ может поступать для повышения экономии топлива и улучшения показателей по выбросам. Желаемая процентная доля газов РОГ может зависеть от частоты вращения и нагрузки двигателя и сниженных ограничений по ШВР. В еще одном примере, в транспортных средствах, оборудованных охладителем РОГ, когда действуют номинальные ограничения по ШВР, в условиях холодного пуска РОГ может быть блокирована на пороговый период после достижения температуры активации до тех пор, пока не будет достигнута желаемая температура охладителя РОГ. Отсрочка РОГ после активации каталитического нейтрализатора уменьшает ШВР и повышает дорожные качества. При этом, когда в транспортном средстве отсутствуют люди, РОГ можно осуществлять без какой-либо отсрочки после достижения температуры активации каталитического нейтрализатора для повышения экономии топлива.
Если на шаге 410 будет определено, что РОГ нужна, способ 400 следует на шаг 412. На шаге 412 способ 400 предусматривает осуществление РОГ, при этом процентную долю газов РОГ определяют в зависимости не только от частоты вращения и нагрузки двигателя, но и от сниженных ограничений по ШВР. Соответственно, осуществление РОГ включает в себя, на шаге 414, определение желаемой процентной доли газов РОГ в зависимости от частоты вращения и нагрузки двигателя и сниженных ограничений по ШВР. В зависимости от желаемой процентной доли газов РОГ и массового расхода воздуха (МРВ) можно вычислить желаемый поток РОГ. Затем, на шаге 416, регулируют клапан РОГ в зависимости от желаемого потока РОГ для обеспечения желаемой процентной доли газов РОГ во всасываемом воздухе.
Если на шаге 410 будет определено, что РОГ не нужна, способ 400 следует на шаг 418. Например, в условиях холодного пуска, для ускорения активации каталитического нейтрализатора может быть нужно прекратить поток РОГ до тех пор, пока не будет достигнута пороговая температура. В таких условиях, когда температура каталитического нейтрализатора отработавших газов ниже температуры активации, РОГ можно не осуществлять и продолжать эксплуатировать транспортное средство без РОГ до тех пор, пока не будут соблюдены условия для осуществления РОГ в зависимости от частоты вращения и нагрузки двигателя и сниженных ограничений по ШВР (например, до тех пор, пока температура каталитического нейтрализатора отработавших газов, измеренная по показаниям датчика температуры каталитического нейтрализатора отработавших газов, не достигнет пороговой температуры активации).
Таким образом, в первом состоянии, когда в транспортном средстве присутствует один или более человек, желаемая процентная доля газов РОГ может зависеть от частоты вращения и нагрузки двигателя; а во втором состоянии, когда в транспортном средстве отсутствуют люди, и транспортное средство работает в автономном режиме, желаемая процентная доля газов РОГ может зависеть от частоты вращения и нагрузки двигателя и сниженных ограничений по ШВР. В первом состоянии, когда в транспортном средстве присутствует один или более человек, можно применять первую табулированную зависимость, устанавливающую соотношение частоты вращения и нагрузки двигателя с желаемой процентной долей газов РОГ в зависимости от номинальных ограничений по ШВР. Во втором состоянии, когда в транспортном средстве отсутствуют люди, контроллер может применять вторую табулированную зависимость, устанавливающую соотношение частоты вращения и нагрузки двигателя с желаемой процентной долей газов РОГ в зависимости от сниженных ограничений по ШВР. Таким образом, для какой-либо частоты вращения и нагрузки двигателя после холодного пуска двигателя, желаемая процентная доля газов РОГ в первом состоянии может быть меньше желаемой процентной доли газов РОГ во втором состоянии. Следовательно, для какой-либо частоты вращения и нагрузки двигателя после холодного пуска двигателя, поток РОГ в первом состоянии может быть меньше потока РОГ во втором состоянии. Следует понимать, что величина увеличения подачи газов РОГ во втором состоянии может не превышать порог, причем порог зависит от пределов устойчивости горения (или пределов пропуска зажигания).
Далее, на ФИГ. 5 раскрыт пример способа 500 для эксплуатации транспортного средства в состоянии холостого хода при обнаружении отсутствия в транспортном средстве людей. Способ 500 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 500 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 400 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей. В частности, контроллер может отрегулировать работу на холостом ходу путем регулирования работы с ОЦД посредством одного или более исполнительных устройств, например, привода топливной форсунки, для обеспечения возможности работы с ОЦД во время холостого хода для повышения экономии топлива с одновременным снижением ограничений по ШВР при обнаружении отсутствия людей, согласно способу 500, раскрытому ниже.
Выполнение способа 500 начинают на шаге 502. На шаге 502 способ 500 предусматривает определение того, работает ли транспортное средство в условиях холостого хода. Условия холостого хода можно определять по частоте вращения двигателя, и/или скорости транспортного средства, и/или нагрузке двигателя, и/или положению педали акселератора, и/или положению тормозной педали, и/или положению дросселя. Например, условия холостого хода могут быть подтверждены, если: скорость транспортного средства ниже пороговой, и/или частота вращения двигателя ниже пороговой, и/или нагрузка двигателя ниже пороговой, и/или положение дросселя таково, что величина прохода меньше пороговой, и/или величина нажатия тормозной педали больше пороговой, и/или величина нажатия акселератора меньше пороговой. Во время работы в автономном режиме, условия холостого хода можно определять по частоте вращения двигателя, и/или скорости транспортного средства, и/или нагрузке двигателя, и/или положению дросселя.
После подтверждения условий холостого хода, способ 500 следует на шаг 504. На шаге 504 способ 500 предусматривает регулирование работы на холостом ходу в зависимости от сниженных ограничений по ШВР для увеличения преимуществ экономии топлива в ущерб ШВР.
В одном примере регулирование работы на холостом ходу включает в себя, на шаге 506, эксплуатацию транспортного средства в режиме ОЦД в условиях холостого хода. Эксплуатация транспортного средства в режиме ОЦД включает в себя, на шаге 508, определения желаемого числа и желаемой комбинации отключаемых цилиндров. Желаемое число и желаемая комбинация цилиндров могут быть определены, исходя из необходимости повышения экономии топлива с ухудшением показателей ШВР системы привода. Например, в условиях холостого хода, транспортное средство может работать в режиме с уменьшенным рабочим объемом, в котором эксплуатируют минимальное число цилиндров с максимальной отдачей мощности. Так как транспортное средство работает без присутствия людей, пульсации крутящего момента или возмущения, создаваемые срабатываниями цилиндров, которые могут передаваться через шасси и создавать шум и вибрацию в салоне транспортного средства, могут не ограничивать применение режима работы с ОЦД. После определения числа и желаемой комбинации цилиндров, отключаемых во время холостого хода, способ 500 предусматривает, на шаге 510, отключение указанного числа цилиндров путем отключения впускных клапанов, и/или выпускных клапанов, и/или зажигания, и/или впрыска топлива. Например, контроллер может отключить указанное число цилиндров посредством привода впускного клапана, и/или привода выпускного клапана, и/или привода свечи зажигания, и/или привода топливной форсунки.
Таким образом, во время холостого хода или в условиях, близких к холостому ходу, при отсутствии людей, эксплуатация транспортного средства в режиме ОЦД и выбор числа цилиндров, отключаемых в режиме ОЦД, исходя из увеличения преимуществ экономии топлива и снижения ограничений по ШВР, позволяет повысить экономию топлива в ущерб ШВР.
Далее, на шаге 512, момент зажигания включенных цилиндров можно изменить в сторону запаздывания. Степень запаздывания может зависеть от повышения экономии топлива и сниженных ограничений по ШВР. Например, величину запаздывания зажигания можно уменьшить для повышения экономии топлива.
В одном примере, в первом состоянии, когда в транспортном средстве присутствует один или более человек, можно блокировать работу с ОЦД в условиях холостого хода для улучшения дорожных качеств; и во втором состоянии, когда в транспортном средстве отсутствуют люди, и транспортное средство работает в автономном режиме, двигатель можно эксплуатировать в режиме ОЦД для повышения экономии топлива в ущерб дорожным качествам.
На ФИГ. 6А раскрыт пример способа 600 для регулирования режима работы двигателя с ОЦД в условиях, когда в транспортном средстве отсутствуют люди. А именно, можно расширить диапазон применения режима ОЦД, когда в транспортном средстве отсутствуют люди, для повышения экономии топлива. Способ 600 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 600 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 600 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей. В частности, контроллер может отрегулировать работу с ОЦД в зависимости от сниженных ограничений по ШВР путем регулирования впускного клапана, и/или выпускного клапана, и/или момента зажигания, и/или впрыска топлива, для отключения одного или более цилиндров двигателя в режиме ОЦД посредством привода впускного клапана, и/или привода выпускного клапана, и/или привода свечи зажигания, и/или привода топливной форсунки, для повышения экономии топлива в ущерб ШВР при обнаружении отсутствия людей, согласно способу 600, раскрытому ниже.
Выполнение способа 600 начинают на шаге 602. На шаге 602 способ 600 предусматривает определение того, работает ли транспортное средство в режиме ОЦД. Например, то, что транспортное средство работает в режиме ОЦД, может быть подтверждено, если некоторое число цилиндров отключено, а остальные цилиндры работают. То, что цилиндры отключены, можно определить по условиям впускного клапана, и/или выпускного клапана, и/или топливных форсунок, и/или свечи зажигания. Если ответ на шаге 602 будет "ДА", то транспортное средство работает в режиме ОЦД, и способ 600 следует на шаг 614.
Если ответ на шаге 602 будет "НЕТ", транспортное средство не работает в режиме ОЦД, и способ 600 следует на шаг 604. На шаге 604 способ 600 предусматривает определение того, соблюдены ли условия для отключения цилиндров, в зависимости от сниженных ограничений по ШВР. Например, можно измерить и/или оценить параметры работы транспортного средства и/или двигателя. Кроме того, могут быть введены сниженные ограничения по ШВР, и контроллер может определить, желательно ли эксплуатировать транспортное средство в режиме ОЦД, с учетом сниженных ограничений по ШВР. Например, в условиях с частотой вращения холостого хода или близкой к ней, когда действуют номинальные ограничения по ШВР, работа с ОЦД может быть блокирована для более плавного хода и более комфортного ощущения. При этом, эксплуатация транспортного средства в режиме ОЦД во время холостого хода или в условиях, близких к холостому ходу, позволяет повысить экономию топлива. Поэтому, когда в транспортном средстве отсутствуют люди, и транспортное средство работает в автономном режиме, ограничения по ШВР можно снизить, и выбрать режим эксплуатации двигателя, в котором предпочтение отдано экономии топлива, а не ШВР. Соответственно, на шаге 604 способ 600 предусматривает определение того, желательна ли работа с ОЦД для повышения экономии топлива в ущерб ШВР. Например, можно скорректировать один или более порогов, например, пороги частоты вращения и нагрузки двигателя, в пределах которых возможна работа с ОЦД, и контроллер, с учетом скорректированных порогов, может определить, желательна ли работа с ОЦД, после ввода сниженных ограничений по ШВР.
Один или более порогов могут включать в себя первый порог для числа цилиндров, которое может быть отключено при работе с ОЦД. Например, в связи со снижением ограничений по ШВР, первый порог для числа цилиндров, которое может быть отключено, можно повысить.
Один или более порогов, которые можно скорректировать с учетом сниженных ограничений по ШВР, также могут включать в себя второй порог для частоты вращения двигателя, ниже которого работа с ОЦД может быть блокирована. Например, с учетом ограничений по ШВР, второй порог для частоты вращения двигателя можно снизить так, что работа с ОЦД может быть разрешена в условиях холостого хода или в условиях, близких к холостому ходу, двигателя. Таким образом, эксплуатация двигателя в режиме с уменьшенным рабочим объемом во время холостого хода или в условиях, близких к холостому ходу, может не быть ограничена, если действуют сниженные ограничения по ШВР, что повышает экономию топлива.
Один или более порогов, которые можно скорректировать с учетом сниженных ограничений по ШВР, также могут включать в себя третий порог для количества передач или передаточных чисел, при которых может быть разрешена работа с ОЦД. Например, по включенной передаче в трансмиссии или передаточному числу можно определять, следует ли работать в режиме с уменьшенным рабочим объемом. Как правило, когда действуют номинальные ограничения по ШВР, работа в режиме ОЦД может быть блокирована во время работы транспортного средства на первой и/или второй передаче. При этом, когда действуют сниженные ограничения по ШВР, в зависимости от потребностей в крутящем моменте, режим работы с ОЦД на первой и/или второй передаче может не быть блокирован. Таким образом, если потребности в крутящем моменте удовлетворены, можно разрешить эксплуатацию двигателя в режиме ОЦД, когда текущее передаточное число в трансмиссии соответствует первой и/или второй передаче, для повышения экономии топлива.
Таким образом, можно расширить пределы для работы с ОЦД для повышения экономии топлива в ущерб ШВР, при отсутствии людей.
Если на шаге 604 будет подтверждено, что условия для отключения цилиндров с учетом сниженных ограничений по ШВР соблюдены (то есть режим работы двигателя с ОЦД желателен), способ 600 следует на шаг 608. На шаге 608 способ 600 предусматривает переход в режим работы с ОЦД и эксплуатацию двигателя в режиме ОЦД. Переход в режим работы с ОЦД и эксплуатация двигателя в режиме ОЦД рассмотрены на шагах 508 и 510 на ФИГ. 5. Вкратце, число и желаемую комбинацию отключаемых цилиндров определяют, исходя из повышения экономии топлива и применения сниженных ограничений по ШВР. Далее указанное число цилиндров отключают путем отключения впускных клапанов, и/или выпускных клапанов, и/или зажигания, и/или впрыска топлива.
Если на шаге 602 будет определено, что транспортное средство работает в режиме ОЦД, когда в транспортном средстве отсутствуют люди, способ 600 следует на шаг 614. На шаге 614 способ 600 предусматривает определение того, является ли число отключенных цилиндров оптимальным для экономии топлива. Например, табулированная зависимость, содержащая желательное число отключенных цилиндров для экономии топлива в ущерб ограничениям по ШВР (например, когда в транспортном средстве отсутствуют люди), и желательное число отключенных цилиндров для требуемых дорожных качеств (например, когда в транспортном средстве присутствует один или более человек) при разных частотах вращения и нагрузках, может быть сохранена в памяти контроллера. На шаге 614 способ 600 может сравнить текущее число отключенных цилиндров с желательным числом отключенных цилиндров для экономии топлива. В одном примере желательное число отключенных цилиндров для экономии топлива может быть больше желательного числа отключенных цилиндров для требуемых дорожных качеств. То есть, когда предпочтение отдают дорожным качествам, а не экономии топлива, может быть отключено меньшее число цилиндров; а когда предпочтение отдают экономии топлива, а не дорожным качествам, может быть отключено большее число цилиндров. Таким образом, если на шаге 614 текущее число отключенных цилиндров не равно желательному числу отключенных цилиндров для экономии топлива, транспортное средство не работает с желательной экономией топлива. Соответственно, способ 600 следует на шаг 618. На шаге 618 способ предусматривает регулирование работы с ОЦД для повышения экономии топлива в ущерб ШВР. Регулирование работы с ОЦД для повышения экономии топлива включает в себя, на шаге 620, определение желательного числа цилиндров и желательной комбинации отключаемых цилиндров с учетом повышения экономии топлива и сниженных ограничений по ШВР. Например, желательное число цилиндров для экономии топлива можно определить по табулированной зависимости, речь о которой шла выше. Регулирование работы с ОЦД также включает в себя, на шаге 622, отключение желательного числа цилиндров путем отключения впускных клапанов, и/или выпускных клапанов, и/или зажигания, и/или впрыска топлива. Например, если текущее число отключенных цилиндров меньше желательного числа отключенных цилиндров для экономии топлива, можно отключить цилиндры в количестве, соответствующем их разности (то есть желательное число минус текущее число).
Таким образом, число отключаемых цилиндров можно регулировать для оптимальной экономии топлива за счет снижения ограничений по ШВР.
Если на шаге 614 текущее число отключенных цилиндров равно желательному числу отключенных цилиндров для экономии топлива, транспортное средство работает с желательной экономией топлива. Поэтому способ 600 следует на шаг 616. На шаге 616 способ предусматривает оставление без изменений текущей работы с ОЦД.
Несмотря на то, что приведенные примеры иллюстрируют регулирование режима работы с ОЦД независимо от других процессов, следует понимать, что в условиях, когда действуют сниженные ограничения по ШВР, регулирование работы с ОЦД можно координировать с одним или более другими процессами транспортного средства, например, работой гидротрансформатора, РОГ и т.п.
На ФИГ. 6В представлена диаграмма, иллюстрирующая диапазон применения ОЦД в зависимости от разных ограничений по ШВР. График работы с ОЦД построен в зависимости от прохода дросселя и частоты вращения двигателя.
Прямоугольная граница 656 обозначает пример диапазона применения ОЦД, когда действуют номинальные ограничения по ШВР. Например, когда присутствует один или более человек, могут действовать номинальные ограничения по ШВР, и работа с ОЦД может быть допустима только при частотах вращения среднего диапазона при низких и/или средних нагрузках. Прямоугольная граница 652 обозначает пример диапазона применения, когда действуют первые сниженные ограничения по ШВР. Например, при отсутствии людей, действуют первые сниженные ограничения по ШВР, и диапазон применения работы с ОЦД может быть расширен на области более низких частот вращения и более высоких нагрузок (например, на которые указывает больший проход дросселя). Прямоугольная граница 654 обозначает пример диапазона применения, когда действуют вторые сниженные ограничения по ШВР. Например, когда присутствует один или более человек, и оператор транспортного средства отдает предпочтение экономии топлива, а не ШВР (например, через водительский интерфейс), могут быть применены вторые сниженные ограничения по ШВР. Когда действуют вторые сниженные ограничения, диапазон применения работы с ОЦД можно расширить так, чтобы он был больше, чем при применении номинальных ограничений по ШВР, но меньше, чем при применении первых сниженных ограничений по ШВР.
На ФИГ. 7А раскрыта блок-схема примера способа 700 для регулирования работы гидротрансформатора, исходя из повышения экономии топлива в ущерб дорожным качествам. А именно, способ 700 можно выполнять, при обнаружении отсутствия людей в транспортном средстве во время работы транспортного средства. Способ 700 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 700 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 700 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей. В частности, контроллер может регулировать работу гидротрансформатора, например, гидротрансформатора 206 на ФИГ. 2, в зависимости от сниженных ограничений по ШВР посредством исполнительного устройства гидротрансформатора для повышения экономии топлива в ущерб ШВР при обнаружении отсутствия людей согласно способу 700, раскрытому ниже.
Выполнение способа 700 начинают на шаге 702. На шаге 702 способ 700 предусматривает определение текущей работы гидротрансформатора. Например, на шаге 702 определение текущего режима работы гидротрансформатора включает в себя определение текущей частоты вращения проскальзывания блокировочной муфты. Текущую частоту вращения проскальзывания можно определять по частоте вращения насосного колеса гидротрансформатора, и/или частоте вращения турбинного колеса гидротрансформатора, и/или коэффициенту заполнения соленоида блокировочной муфты.
После определения текущей частоты вращения проскальзывания, способ 700 следует на шаг 704. На шаге 704 способ 700 включает в себя определение желаемого режима работы гидротрансформатора. Например, определение желаемого режима работы гидротрансформатора на шаге 704 включает в себя переход к графику для регулирования работы гидротрансформатора, соответствующему отсутствию пассажиров в транспортном средстве. График может включать в себя режим гидротрансформатора для рабочего диапазона частоты вращения и нагрузки, в котором предпочтение отдают экономии топлива, а не ШВР (то есть дорожным качествам). Таким образом, для какой-либо частоты вращения и нагрузки желаемую частоту вращения проскальзывания гидротрансформатора можно определить по графику, соответствующему отсутствию пассажиров в транспортном средстве, при этом желаемая частота вращения проскальзывания обеспечивает предпочтение экономии топлива, а не ШВР. Данный график может быть сохранен в памяти контроллера с возможностью использования для определения желаемой частоты вращения проскальзывания при подтверждении контроллером отсутствия людей в транспортном средстве. Пример режима или графика проскальзывания гидротрансформатора раскрыт на ФИГ. 7В. А именно, ФИГ. 7В иллюстрирует направленность смещения графика проскальзывания гидротрансформатора, когда в транспортном средстве отсутствуют люди. Таким образом, график, соответствующий отсутствию пассажиров в транспортном средстве, может быть смещен, как показано на ФИГ. 7В.
В примере на ФИГ. 7В график проскальзывания гидротрансформатора построен в зависимости от прохода дросселя и частоты вращения двигателя. Линия 710 представляет желаемое проскальзывание для гидротрансформатора величиной 100%, а линия 720 - желаемое проскальзывание для гидротрансформатора величиной 0%. Желаемое проскальзывание составляет 0%, когда работа двигателя происходит на линии 720, и гидротрансформатор находится в блокированном состоянии. Желаемое проскальзывание составляет 100%, когда работа двигателя происходит на линии 710, и гидротрансформатор находится в блокированном состоянии. При этом, между линиями 710 и 720 гидротрансформатор может находиться в частично блокированном состоянии. Например, линии 712, 714, 716 и 718 представляют проскальзывание величиной 80%, 60%, 40% и 20% соответственно. Когда гидротрансформатор находится в частично блокированном состоянии, можно выдавать команды для достижения им желаемого проскальзывания в зависимости от частоты вращения и нагрузки двигателя.
График гидротрансформатора можно регулировать в зависимости от числа присутствующих в транспортном средстве людей. Например, когда в транспортном средстве отсутствуют люди, график гидротрансформатора можно скорректировать так, чтобы предпочтение было отдано экономии топлива, а не ШВР и дорожным качествам. Следовательно, график гидротрансформатора может быть смещен в направлении, указанном стрелкой 730. То есть график, соответствующий отсутствию пассажиров в транспортном средстве, скорректирован в сторону меньшего проскальзывания. Уменьшение проскальзывания может способствовать экономии топлива за счет уменьшения разрыва потока мощности во время преобразования крутящего момента. При этом, уменьшение проскальзывания уменьшает соединение по текучей среде, что уменьшает эффект гашения колебаний крутящего момента. Это может привести к ухудшению дорожных качеств. При этом, поскольку в транспортном средстве отсутствуют люди, дорожными качествами можно пожертвовать для повышения экономии топлива.
Смещение графика гидротрансформатора к графику, соответствующему отсутствию пассажиров, можно выполнять в зависимости от пределов допустимых ШВР. А именно, при отсутствии людей пределы допустимых ШВР могут быть повышены. Поэтому степень смещения в сторону меньшего проскальзывания может зависеть от повышения пределов допустимых ШВР.
Как сказано выше, желаемая частота вращения проскальзывания при отсутствии в транспортном средстве людей может зависеть от достижения большей экономии топлива в ущерб дорожным качествам. Например, для какой-либо частоты вращения и нагрузки двигателя желаемая частота вращения проскальзывания при отсутствии людей может быть меньше частоты вращения проскальзывания, когда в транспортном средстве присутствует один или более человек.
Определив желаемую частоту вращения проскальзывания, способ 700 следует на шаг 706. На шаге 706 способ 700 предусматривает регулирование одного или более исполнительных устройств для изменения текущей работы гидротрансформатора в зависимости от желаемой работы гидротрансформатора. Например, если будет определено отсутствие людей в транспортном средстве, то для текущей частоты вращения и нагрузки двигателя желаемое проскальзывание может быть меньше текущего. Поэтому контроллер, определив желаемое проскальзывание, может направить сигналы приводу блокировочной муфты для уменьшения проскальзывания блокировочной муфты таким образом, чтобы было достигнуто целевое состояние зацепления (и, следовательно, желаемое проскальзывание) блокировочной муфты.
После достижения желаемого проскальзывания, способ 700 может совершить возврат.
В некоторых примерах, способ 700 можно выполнять в выбранном присутствующим человеком режиме, в котором присутствующий человек делает выбор в пользу эксплуатации транспортного средства с повышенной экономией топлива в ущерб дорожным качествам. Таким образом, работу блокировочной муфты можно изменять в зависимости от выбранной присутствующим человеком настройки. А именно, контроллер может изменять работу блокировочной муфты в зависимости от выбранной присутствующим человеком настройки, полученной от интерфейса транспортного средства. Например, когда присутствующий человек выбирает настройку, отдающую предпочтение повышению экономии топлива, а не ШВР, контроллер может уменьшить желаемое проскальзывание гидротрансформатора. Желаемое проскальзывание можно определять по графику, скорректированному в сторону меньшего проскальзывания, когда присутствующий человек отдает предпочтение экономии топлива. В противном случае, если присутствующий человек выберет настройку, отдающую предпочтение улучшению показателей ШВР, контроллер может увеличить желаемое проскальзывание гидротрансформатора. В данном случае желаемое проскальзывание можно определять по графику, скорректированному в сторону большего проскальзывания, когда присутствующий человек отдает предпочтение дорожным качествам.
В одном примере, во время работы в выбранном присутствующим человеком режиме, в транспортном средстве могут находиться один или более человек. Когда в транспортном средстве присутствует один или более человек, и присутствующий человек выбирает режим, отдающий предпочтение экономии топлива, контроллер может использовать график, соответствующий выбранному присутствующим человеком режиму, отдающему предпочтение экономии топлива, и поэтому скорректированный в сторону меньшего проскальзывания. При этом, так как в транспортном средстве присутствует один или более человек, пороговый предел ШВР может быть меньше, чем когда в транспортном средстве отсутствуют люди. Таким образом, когда в транспортном средстве присутствует один или более человек, и оно работает в выбранном присутствующим человеком режиме, отдающем предпочтение экономии топлива, желаемое проскальзывание для какой-либо частоты вращения и нагрузки может быть больше желаемого проскальзывания при отсутствии людей, но меньше, чем когда предпочтение отдают дорожным качествам.
Следует понимать, что примеры, в которых желаемое проскальзывание при отсутствии людей является таким же, как желаемое проскальзывание, когда в транспортном средстве присутствует один или более человек, и оно работает в выбранном присутствующим человеком режиме экономии топлива, также входят в объем настоящего раскрытия.
На ФИГ. 8А раскрыт пример способа 800 для коррекции пределов перегрузки двигателя. А именно, способ 800 можно выполнять при обнаружении отсутствия людей в транспортном средстве. Перегрузка двигателя может означать состояние, имеющее место во время работы транспортного средства на высокой передаче с относительно низкой частотой вращения двигателя (например, ниже 2000 об./мин). Если в этих условиях нужно ускорение транспортного средства, крутящий момент, создаваемый двигателем, может быть меньше, в связи с чем двигатель может с трудом придавать транспортному средству нужное движение. Поэтом ускорение будет низким. Из-за высокой нагрузки и низких частот вращения двигателя, частота зажигания является низкой, что приводит к возмущениям в системе привода. Присутствующие в транспортном средстве люди могут ощущать такие вибрации системы привода в форме вибрации направляющей сиденья, и/или вибрации рулевого колеса, и/или звука гудения внутри салона. Как правило, ШВР из-за перегрузки двигателя можно регулировать посредством гидротрансформатора, передающего и усиливающего крутящий момент от двигателя трансмиссии за счет соединения по текучей среде. Например, в условиях с перегрузкой двигателя можно увеличить проскальзывание гидротрансформатора для гашения эффекта вибраций, создаваемых во время перегрузки двигателя. Так происходит улучшение дорожных качеств. При этом, увеличение проскальзывания гидротрансформатора снижает экономию топлива из-за наличия соединение по текучей среде и трения муфты. Поэтому, когда в транспортном средстве отсутствуют люди, могут быть допустимы ШВР из-за перегрузки двигателя для повышения экономии топлива. Способ 800 иллюстрирует корректировку пределов допустимых ШВР для перегрузки двигателя и регулирование работы гидротрансформатора так, чтобы во время перегрузки двигателя предпочтение было отдано экономии топлива, а не дорожных качеств, когда в транспортном средстве отсутствуют люди. Способ 800 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 800 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 800 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей. В частности, контроллер может отрегулировать работу гидротрансформатора в зависимости от сниженных ограничений по ШВР посредством исполнительного устройства гидротрансформатора для повышения экономии топлива в ущерб ШВР при обнаружении отсутствия людей согласно способу 800, раскрытому ниже.
Выполнение способа 800 начинают на шаге 802. На шаге 802 способ 800 предусматривает корректировку пределов перегрузки двигателя, а именно - пределов допустимых ШВР перегрузки двигателя, в зависимости от сниженных ограничений по ШВР. Корректировка пределов перегрузки двигателя включает в себя, на шаге 804, повышение порога допустимых ШВР. Корректировка пределов перегрузки двигателя также включает в себя, на шаге 806, уменьшение проскальзывания гидротрансформатора в условиях с перегрузкой двигателя. Пример графика, иллюстрирующего крутильную вибрацию на выходе трансмиссии в зависимости от частоты вращения двигателя при различных частотах вращения проскальзывания приведен на ФИГ. 8В. Линия 810 указывает предел перегрузки двигателя, когда в транспортном средстве присутствует один или более человек, а линия 820 - скорректированный предел перегрузки двигателя, когда в транспортном средстве отсутствуют люди. Как правило, когда в транспортном средстве присутствует один или более человек, может быть задан предел перегрузки двигателя, указанный линией 810. В таких условиях, при относительно низких частотах вращения двигателя, проскальзывание гидротрансформатора не выше 30 об./мин не позволит достичь желаемых целевых показателей ШВР. Таким образом, транспортное средство нельзя эксплуатировать с проскальзыванием гидротрансформатора не выше 30 для достижения желаемого уровня ШВР и поддержания дорожных качеств. Иными словами, работу гидротрансформатора регулируют так, чтобы поддержать желаемые уровни ШВР во время перегрузки двигателя. При этом, более высокое проскальзывание гидротрансформатора, при котором предпочтение отдано дорожным качествам, может снизить экономию топлива. Поэтому, когда в транспортном средстве отсутствуют люди, предел допустимых ШВР для перегрузки двигателя можно повысить (как указано линией 820) для обеспечения возможности работы гидротрансформатора при меньшем проскальзывании, повышающем экономию топлива в ущерб ШВР. График 800b может быть сохранен в памяти контроллера с возможностью использования для выбора графика гидротрансформатора, соответствующего повышенным пределам допустимых ШВР, по которому можно определять желаемое проскальзывание в таких условиях двигателя, как перегрузка двигателя, в зависимости от числа присутствующих в транспортном средстве людей.
Таким образом, когда в транспортном средстве отсутствуют люди, пределы допустимых ШВР можно повысить, чтобы в условиях с перегрузкой двигателя проскальзывание гидротрансформатора можно было уменьшить для повышения экономии топлива в ущерб дорожным качествам.
Далее, на ФИГ. 9 раскрыта блок-схема примера способа 900 для регулирования переключения передач в трансмиссии в зависимости от сниженных ограничений по ШВР. А именно, способ 900 можно выполнять при обнаружении отсутствия людей в транспортном средстве. Способ 900 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 900 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 900 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей.
Выполнение способа 900 начинают на шаге 902. На шаге 902 способ 900 предусматривает использование графика переключения передач в зависимости от сниженных ограничений по ШВР. А именно, решения о повышении и понижении передач могут зависеть от сниженных ограничений по ШВР. График переключения передач, в основе которого лежат сниженные ограничения по ШВР, отдает предпочтение экономии топлива, и включает в себя, на шаге 904, раннее повышение передачи при относительно низких частотах вращения двигателя, и, на шаге 906, уменьшения числа понижений передач.
Далее, на шаге 908, способ 900 предусматривает регулирование работы гидротрансформатора при переключении передач в трансмиссии. Когда присутствует один или более человек, гидротрансформатор может работать с блокировочной муфтой в разблокированном состоянии для более плавного переключения передач. После выполнения переключения передачи, в зависимости от частоты вращения и нагрузки двигателя, блокировочную муфту можно ввести в зацепление в блокированном положении. В разблокированном состоянии, из-за наличия соединения по текучей среде, имеет место потеря экономии топлива. Переключение между блокированным и разблокированным состоянием также увеличивает проигрыш в экономии топлива. Поэтому, когда в транспортном средстве отсутствуют люди, необходимостью более плавного переключения передач можно пожертвовать, и гидротрансформатор можно эксплуатировать так, чтобы повысить экономию топлива. Соответственно, в одном примере, муфту гидротрансформатора можно установить в блокированное положение при переключении передач в трансмиссии. В другом примере, при переключении передач в трансмиссии муфту гидротрансформатора можно оставить в состоянии (которое может быть блокированным или разблокированным) до переключения передач в трансмиссии.
В еще одном примере, проскальзывание муфты трансмиссии при переключении передач также можно применять и регулировать в зависимости от числа присутствующих людей. Например, проскальзывание муфты трансмиссии при переключении передач можно применять для создания у присутствующего человека ощущения более плавных переключений передач. При отсутствии людей проскальзывание муфты трансмиссии можно уменьшить для повышения экономии топлива.
Таким образом, переключение передач в трансмиссии можно регулировать для повышения экономии топлива в ущерб ШВР.
Далее, на ФИГ. 10, раскрыта блок-схема примера способа 1000 для регулирования работы с ОТЗ в зависимости от сниженных ограничений по ШВР. Способ 1000 можно выполнять, если определено отсутствие людей в транспортном средстве, и транспортное средство работает в автономном режиме. Способ 1000 можно выполнять совместно со способом 300 на ФИГ. 3. Способ 1000 будет раскрыт на примерах компонентов и систем, представленных на ФИГ. 1А, 1В и 2, при этом следует понимать, что данный способ можно применять к другим системам без отступления от объема настоящего раскрытия. Инструкции для реализации способа 1000 может осуществлять контроллер, например, контроллер 12 на ФИГ. 1А, 1В и 2, в соответствии с инструкциями в долговременной памяти контроллера и во взаимосвязи с сигналами от датчиков системы транспортного средства, например, датчиков, раскрытых выше на примере ФИГ. 1А, 1В и 2. Контроллер может задействовать исполнительные устройства системы транспортного средства, например, раскрытые на примере ФИГ. 1А, 1В и 2, для регулирования работы транспортного средства в зависимости от числа присутствующих людей. В частности, контроллер может отрегулировать работу с ОТЗ в зависимости от сниженных ограничений по ШВР путем регулирования работы топливной форсунки, например, топливной форсунки 69 на ФИГ. 2, посредством привода топливной форсунки для повышения экономии топлива в ущерб ШВР при обнаружении отсутствия людей, согласно способу 1000, раскрытому ниже.
Выполнение способа 1000 начинают на шаге 1002. На шаге 1002 способ 1000 предусматривает определение того, работает ли двигатель в условиях с отсечкой топлива при замедлении (ОТЗ). Состояние с ОТЗ представляет собой состояние без подачи топлива, во время которого подача топлива прервана, но двигатель продолжает вращаться, и как минимум один впускной клапан и один выпускной клапан работают; таким образом, воздух течет через один или более цилиндров, но впрыск топлива в цилиндры не происходит. В условиях с ОТЗ топливная форсунка выключена, и сгорание не осуществляют, при этом воздух окружающей среды может проходить через цилиндр из заборного канала в выпускной канал. Соответственно, условия с ОТЗ могут быть подтверждены на основании выключения топливных форсунок в одном, нескольких, или всех цилиндрах двигателя, а также скорости транспортного средства, и/или положения дросселя, и/или частоты вращения двигателя, и/или нагрузки двигателя. Если условия с ОТЗ будут подтверждены, ответ на шаге 1002 будет "ДА", и способ 1000 следует на шаг 1022 для продолжения работы с ОТЗ.
Если в текущий момент двигатель не работает с ОТЗ, способ 1000 следует на шаг 1004 для определения того, работает ли двигатель в условиях, в которых желательна ОТЗ. ОТЗ можно инициировать в зависимости от скорости транспортного средства, и/или ускорения транспортного средства, и/или частоты вращения двигателя, и/или нагрузки двигателя, и/или положения дросселя, и/или передачи в трансмиссии, и можно осуществлять несколько раз за цикл езды. В одном примере ОТЗ можно инициировать, если частота вращения двигателя ниже пороговой. В другом примере ОТЗ можно инициировать, если нагрузка двигателя ниже порога. В еще одном примере, во время работы в автономном режиме, ОТЗ можно инициировать в связи с положением дросселя и/или изменением положения дросселя на соответствующий период - например, ОТЗ можно инициировать, если произошло пороговое изменение положения дросселя, указывающее на появление запроса замедления. Дополнительно или альтернативно, ОТЗ можно инициировать, если транспортное средство пробыло в условиях замедления (например, дроссель оставался в пороговом открытом положении) в течение порогового периода. Дополнительно или альтернативно, необходимость вхождения в состояние ОТЗ может быть установлена на основании сигнала команды прекращения впрыска топлива.
Если условия для вхождения в ОТЗ отсутствуют, ответ на шаге 1004 будет "НЕТ", и способ 1000 следует на шаг 1020. На шаге 1020 способ 1000 предусматривает продолжение без изменений текущей работы транспортного средства. Если условия для вхождения в ОТЗ соблюдены, ответ на шаге 1004 будет "ДА", и способ 1000 следует на шаг 1008.
На шаге 1008 способ 1000 предусматривает незамедлительный переход к работе с ОТЗ. Например, во время отсечки топлива при замедлении (ОТЗ) может возникнуть проблема плохих дорожных качеств. А именно, плохих дорожные качества может быть результатом возникновения зазора шестерен в трансмиссии или системе привода. Например, когда двигатель переходит от создания положительного крутящего момента к созданию отрицательного крутящего момента (или в ведомое состояние), происходит разъединение шестерней в трансмиссии или системе привода в переходной точке нулевого крутящего момента. Затем, пройдя через точку нулевого крутящего момента, шестерни вновь входят в контакт для передачи крутящего момента. При данной последовательности событий происходит соударение или возникает лязг. Эффекты, вызываемые зазором шестерен в трансмиссии, могут быть усилены в зависимости от состояния трансмиссии. Например, чувствительность к шуму, вибрации и резкости (ШВР) может быть выше при работе с приводом на все колеса или в режиме 4×4, чем при работе с приводом на два колеса. Такая чувствительность также может быть тем выше, чем ниже передача в трансмиссии в целом, например, при работе в режиме 4×4 на пониженной передаче. Поэтому, для улучшения дорожных качеств, ограничивают отключение впрыска топлива во время замедления, когда транспортное средство работает с приводом на все колеса или в режиме 4×4 на пониженной передаче. Лязг также может быть более ощутим или ощутим при некоторых скоростях транспортного средства ниже порога лязга. В таких условиях ОТЗ также может быть блокирована. Отключение топливных форсунок также можно отсрочить до стабилизации частоты вращения двигателя для уменьшения ШВР. При этом, ограничение ОТЗ или отсрочка ОТЗ влияют на экономию топлива. Поэтому, когда в транспортном средстве отсутствуют люди, и транспортное средство работает автономно, ШВР могут быть в значительной степени допустимы, а значимость дорожных качеств снижена.
Таким образом, когда в транспортном средстве отсутствуют люди, и транспортное средство работает в автономном режиме, работу с ОТЗ можно осуществлять в более широком диапазоне рабочих условий, а впрыск топлива можно отключать незамедлительно при появлении условий для вхождения в ОТЗ. А именно, ОТЗ можно осуществлять во время работы с приводом на все колеса и/или на пониженной передаче. Порог лязга также можно снизить для осуществления ОТЗ при относительно низких скоростях транспортного средства. Кроме того, ОТЗ можно инициировать незамедлительно после появления условий для вхождения в нее без отсрочки ОТЗ до стабилизации частоты вращения двигателя. Далее, осуществление ОТЗ включает в себя, на шаге 1010, отключение впрыска топлива во все цилиндры.
Таким образом, ОТЗ осуществляют более активно в более широком диапазоне рабочих условий и без отсрочки, когда в транспортном средстве отсутствуют люди, тем самым отдавая приоритет экономии топлива перед дорожными качествами.
Далее способ 1000 следует на шаг 1012. На шаге 1012 способ 1000 предусматривает определение того, отпущен ли тормоз, или того, превышает ли величина отпускания тормоза некий порог, при этом порог зависит от сниженных ограничений по ШВР. При отсутствии людей, когда транспортное средство работает автономно, торможение можно определять, например, по давлению в тормозной системе.
Когда в транспортном средстве присутствует один или более человек, для смягчения лязга и улучшения реагирования на нажатие педали акселератора можно осуществлять ранний выход из ОТЗ. А именно, поскольку для восстановления сгорания в двигателе должен пройти некоторый период (например, количество времени или рабочих циклов двигателя), водитель может легко почувствовать лязг при выходе из ОТЗ, если форсунки, устройства регулирования сгорания, трансмиссии и крутящего момента двигателя не получат достаточно времени для стабилизации. Нажатие водителем педали акселератора можно прогнозировать для подготовки устройств регулирования крутящего момента до события нажатия педали акселератора, используя тормозной крутящий момент и усилие. Таким образом, двигатель получит достаточно времени для подготовки к возобновлению впрыска топлива. Так можно обеспечить возможность создания двигателем требуемого крутящего момента, как только водитель нажмет педаль акселератора, и уменьшение ШВР силового агрегата. При этом, когда в транспортном средстве отсутствуют люди, ограничения по ШВР снижены, и приоритет отдан экономии топлива. Поэтому можно осуществить ранний выход из ОТЗ. Соответственно, можно повысить пороговую величину отпускания тормоза (то есть пороговая величина отпускания тормоза для выхода из ОТЗ, когда присутствует один или более человек, меньше пороговой величины отпускания тормоза для выхода из ОТЗ при отсутствии людей), чтобы ОТЗ можно было осуществлять более активно в течение более длительного времени при сниженных ограничениях по ШВР. Это позволяет достичь большей экономии топлива, когда в транспортном средстве отсутствуют люди, и оно работает в автономном режиме.
Если ответ на шаге 1012 будет "НЕТ", способ 1000 следует на шаг 1018. На шаге 1018 способ 1000 предусматривает продолжение без изменений текущей работы с ОТЗ. Если ответ на шаге 1012 будет "ДА", способ 1000 следует на шаг 1014. На шаге 1014 способ 1000 предусматривает определение того, ниже ли скорость транспортного средства, чем низкая пороговая скорость, при этом низкая пороговая скорость зависит от сниженных ограничений по ШВР. Например, так как водитель легче ощущает лязг при относительно низких скоростях транспортного средства, когда присутствует один или более человек возобновление впрыска топлива (то есть выход из ОТЗ) можно осуществлять, когда скорость транспортного средства выше высокого порога для улучшения дорожных качеств. При этом, при отсутствии людей, дорожными качествами можно пожертвовать для повышения экономии топлива. Таким образом, возобновлять впрыск топлива можно, когда скорость транспортного средства падает до низкого порога, который ниже указанного высокого порога. Таким образом, диапазон применения работы с ОТЗ можно расширить на области более низких скоростей транспортного средства в связи с меньшей значимостью дорожных качеств, когда в транспортном средстве отсутствуют люди.
Соответственно, если будет подтверждено, что скорость транспортного средства выше пороговой низкой скорости, способ 1000 следует на шаг 1018. На шаге 1018 способ 1000 предусматривает продолжение без изменений текущей работы с ОТЗ. Если будет подтверждено, что скорость транспортного средства не выше пороговой низкой скорости, способ 1000 следует на шаг 1016 для возобновления работы всех топливных форсунок, которые были отключены во время ОТЗ. Затем способ 1000 может совершить возврат.
Таким образом, пороги для работы с ОТЗ могут быть скорректированы с учетом сниженных ограничений по ШВР при отсутствии людей таким образом, чтобы можно было увеличить диапазон применения работы с ОТЗ и достичь большей экономии топлива.
В одном варианте осуществления способа для эксплуатации транспортного средства, при обнаружении отсутствия людей в транспортном средстве, в автономном режиме работы транспортного средства изменяют пределы шума, вибрации и резкости (ШВР) для силового агрегата транспортного средства для повышения экономии топлива. Первый пример способа отличается тем, что изменение пределов ШВР при обнаружении отсутствия людей включает в себя задание более высокого порога ШВР относительно более низкого порога ШВР, заданного, когда в транспортном средстве присутствует один или более человек, и регулирование одного или более параметров работы силового агрегата с учетом более высокого порога ШВР. Второй пример способа необязательно включает в себя первый пример и отличается тем, что силовой агрегат содержит двигатель, соединенный с трансмиссией через гидротрансформатор, и регулирование одного или более параметров силового агрегата с учетом более высокого порога ШВР включает в себя регулирование работы двигателя на холостом ходу, и/или работы двигателя в режиме отключения цилиндров двигателя (ОЦД), и/или проскальзывания гидротрансформатора, и/или отсечки топлива, подаваемого в двигателя, при замедлении (отсечка топлива при замедлении, ОТЗ), и/или процентного отношения отработавших газов рециркуляции и воздуха, всасываемых в двигатель для сгорания. Третий пример способа необязательно включает в себя первый и/или второй примеры и отличается тем, что регулирование одного или более параметров силового агрегата с учетом более высокого порога ШВР также включает в себя переход в режим работы с отключением цилиндров двигателя (ОЦД) в состоянии холостого хода, и увеличение величины запаздывания зажигания, применяемого для сгорания в двигателе, в состоянии холостого хода. Четвертый пример способа необязательно включает в себя один или более примеров с первого по третий и отличается тем, что регулирование одного или более параметров силового агрегата с учетом более высокого порога ШВР также включает в себя, в режиме работы двигателя с ОЦД, отключение некоторого числа цилиндров двигателя с учетом более высокого порога ШВР, при этом число отключаемых цилиндров тем больше, чем выше порог ШВР. Пятый пример способа необязательно включает в себя один или более примеров с первого по четвертый и отличается тем, что регулирование одного или более параметров силового агрегата с учетом более высокого порога ШВР также включает в себя регулирование желаемого проскальзывания гидротрансформатора с учетом более высокого порога ШВР. Шестой пример способа необязательно включает в себя один или более примеров с первого по пятый и отличается тем, что желаемое проскальзывание гидротрансформатора тем меньше, чем выше порог ШВР. Седьмой пример способа необязательно включает в себя один или более примеров с первого по шестой и дополнительно содержит шаг, на котором корректируют пределы ШВР в условиях с перегрузкой двигателя. Восьмой пример способа необязательно включает в себя один или более примеров с первого по седьмой и отличается тем, что корректировка пределов ШВР в условиях с перегрузкой двигателя включает в себя уменьшение проскальзывания гидротрансформатора в условиях с перегрузкой двигателя, при этом процент уменьшения проскальзывания гидротрансформатора тем больше, чем выше пределы ШВР. Девятый пример способа необязательно включает в себя один или более примеров с первого по восьмой и отличается тем, что регулирование одного или более параметров силового агрегата с учетом более высокого порога ШВР включает в себя, если замедление превышает порог, незамедлительный переход в режим работы с отсечкой топлива при замедлении (ОТЗ), во время которого подача топлива в двигатель силового агрегата для сгорания отключена, при этом указанный порог зависит от указанного более высокого предела ШВР. Десятый пример способа необязательно включает в себя один или более примеров с первого по девятый и отличается тем, что регулирование одного или более параметров с учетом более высокого порога ШВР включает в себя отсрочку выхода из режима работы с отсечкой топлива при замедлении (ОТЗ), при котором подача топлива в двигатель силового агрегата отключена; причем отсрочка выхода из ОТЗ включает в себя снижение порога скорости транспортного средства, ниже которого возобновляют работу отключенных топливных форсунок.
В другом варианте способа для эксплуатации транспортного средства задают разные пределы шума, вибрации и резкости (ШВР) для силового агрегата транспортного средства в зависимости числа присутствующих людей, обнаруженных в транспортном средстве, и/или выбранной присутствующим человеком настройки, выбранной присутствующим человеком через интерфейс транспортного средства. Первый пример способа отличается тем, что изменение пределов ШВР включает в себя, при обнаружении отсутствия людей, задание первого, более высокого, порога допустимых ШВР, и регулирование одного или более параметров работы транспортного средства в зависимости от первого, более высокого, порога ШВР. Второй пример способа необязательно включает в себя первый пример и отличается тем, что изменение пределов ШВР включает в себя, в случае обнаружения одного или более присутствующих людей, задание второго, более низкого, порога допустимых ШВР, и регулирование одного или более параметров работы транспортного средства в зависимости от второго, более низкого, порога ШВР. Третий пример способа необязательно включает в себя первый и/или второй примеры и отличается тем, что изменение пределов ШВР включает в себя, в зависимости от выбранной присутствующим человеком настройки, указание предпочтения экономии топлива перед ШВР, задание третьего порога допустимых ШВР, и регулирование одного или более параметров работы транспортного средства в зависимости от третьего порога ШВР, при этом третий порог ШВР выше второго, более низкого порога, и ниже первого, более высокого, порога. Четвертый пример способа необязательно включает в себя один или более примеров с первого по третий и отличается тем, что регулирование одного или более параметров работы транспортного средства с учетом более высокого порога ШВР включает в себя увеличение желаемого количества газов РОГ, и/или диапазона применения ОЦД, и/или числа отключаемых цилиндров в режиме ОЦД, и/или диапазона применения работы с ОТЗ. Пятый пример способа необязательно включает в себя один или более примеров с первого по четвертый и отличается тем, что силовой агрегат содержит двигатель, соединенный с трансмиссией через гидротрансформатор, и регулирование одного или более параметров работы транспортного средства с учетом более высокого порога ШВР включает в себя уменьшение процента проскальзывания гидротрансформатора и/или корректировку графика переключения передач для раннего повышения передач и уменьшения числа понижений передач.
В другом варианте система транспортного средства содержит: двигатель с отключаемыми цилиндрами (ДОЦ), содержащий множество цилиндров, причем один или более цилиндров выполнены с возможностью отключения в режиме работы двигателя с отключением цилиндров, при этом двигатель соединен с трансмиссией через гидротрансформатор; систему обнаружения людей для обнаружения присутствия человека в транспортном средстве, при этом система обнаружения людей содержит один или более датчиков давления сиденья, соединенных с каждым сиденьем транспортного средства; один или более датчиков автономного вождения; автомобильную вычислительную систему, содержащую модуль автономного вождения, при этом модуль автономного вождения содержит инструкции для эксплуатации транспортного средства в автономном режиме на основе сигналов от одного или более датчиков автономного вождения; и процессор и запоминающее устройство, при этом запоминающее устройство содержит инструкции, исполняемые процессором для обнаружения некоторого числа людей в транспортном средстве; в первом состоянии, включающем в себя то, что в транспортном средстве обнаружены один или более человек, регулирования одного или более параметров работы транспортного средства с учетом более низкого порога шума, вибрации и резкости (ШВР) транспортного средства; и во втором состоянии, включающем в себя то, что обнаружено отсутствие людей в транспортном средстве, регулирования одного или более параметров работы транспортного средства с учетом более высокого порога ШВР транспортного средства для повышения экономии топлива в ущерб ШВР; причем в число одного или более параметров работы транспортного средства входят: желаемое количество газов рециркуляции отработавших газов, первый диапазон частоты вращения и нагрузки двигателя для работы с отключением цилиндров, число отключаемых цилиндров в режиме с отключением цилиндров, второй диапазон частоты вращения и нагрузки двигателя для работы с отсечкой топлива при замедлении (ОТЗ), проскальзывание гидротрансформатора, и график переключения передач. Первый пример системы отличается тем, что регулирование одного или более параметров работы транспортного средства с учетом более высокого порога ШВР включает в себя увеличение желаемого количества газов РОГ, увеличение первого диапазона частоты вращения и нагрузки для работы с отключением цилиндров, увеличение числа отключаемых цилиндров в режиме с отключением цилиндров, увеличение второго диапазона частоты вращения и нагрузки двигателя для работы с ОТЗ, и уменьшение проскальзывания гидротрансформатора. Второй пример способа необязательно включает в себя первый пример и отличается тем, что регулирование одного или более параметров работы транспортного средства с учетом более низкого порога ШВР включает в себя уменьшение желаемого количества газов РОГ, уменьшение первого диапазона частоты вращения и нагрузки для работы с отключением цилиндров, уменьшение числа отключаемых цилиндров в режиме с отключением цилиндров, уменьшение второго диапазона частоты вращения и нагрузки двигателя для работы с ОТЗ и уменьшение проскальзывания гидротрансформатора.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут осуществляться системой управления, содержащей контроллер, в сочетании с различными датчиками, исполнительными механизмами и другим аппаратным обеспечением двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки необязательно требуется для достижения отличительных признаков и преимуществ раскрытых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически представлять код, запрограммированный в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия выполняют путем исполнения инструкций в системе, содержащей разнообразные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящей заявке конфигурации и алгоритмы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Объект настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая наличие двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.
Реферат
Предложены способы и системы для коррекции пределов шума, вибрации и резкости (ШВР) для транспортного средства в зависимости от числа пассажиров, присутствующих в транспортном средстве. В одном примере способ может предусматривать, при обнаружении отсутствия людей, снижение ограничений по ШВР для эксплуатации транспортного средства и регулирование одного или более параметров работы транспортного средства с учетом сниженных ограничений по ШВР. Техническим результатом является повышение экономии топлива. 3 н. и 15 з.п. ф-лы, 10 ил.
Комментарии