Система для запуска двигателя и способ управления двигателем - RU2510467C1
Код документа: RU2510467C1
Чертежи




Описание
Область техники
Настоящее изобретение относится к системе для запуска двигателя и способу управления двигателем и, в частности, к технологии для ограничения остановки на холостом ходу или экономичного режима работы двигателя.
Уровень техники
В автомобилях, имеющих двигатели внутреннего сгорания и т.п. в качестве двигателей, устанавливается так называемая функция остановки на холостом ходу или экономичного режима работы, в которой в целях уменьшения расхода топлива или уменьшения выделения выхлопных газов двигатель автоматически останавливается в состоянии, в котором транспортное средство остановлено, и педаль тормоза управляется водителем, и помимо этого двигатель автоматически повторно запускается посредством пользовательской операции повторного запуска, например посредством уменьшения рабочей величины нажатия педали тормоза до нуля.
В транспортном средстве, имеющем функцию остановки на холостом ходу или экономичного режима работы, когда двигатель останавливается и после этого повторно запускается, напряжение аккумулятора, который подает электроэнергию в стартер, может снижаться вследствие приведения в действие стартера. Когда напряжение аккумулятора снижается, запоминающее устройство электронного модуля управления (ЭМУ) может сбрасываться.
Далее, согласно публикации выложенной заявки на патент Японии № 2010-255464 (далее - PTL 1) предлагается останавливать двигатель внутреннего сгорания, если оцененное наименьшее напряжение аккумулятора, когда двигатель внутреннего сгорания повторно запускается после остановки, выше предписанного значения. Как показано в абзаце 35 и на фиг. 2 указанной публикации, наименьшее напряжение оценивается посредством вычитания падения напряжения вследствие запуска электромотора из напряжения непосредственно перед повторным запуском двигателя.
Техническая задача
Предлагается стартер, позволяющий независимо приводить в действие актуатор для зацепления ведущей шестерни с коронной шестерней маховика (или ведущего диска) и электромотор для вращения ведущей шестерни. В таком стартере электромотор приводится в действие до приведения в действие актуатора, за счет чего ведущая шестерня может зацепляться с коронной шестерней после того, как частота вращения ведущей шестерни стартера синхронизирована с частотой вращения коронной шестерни маховика (или ведущего диска). Следовательно, ведущая шестерня может зацепляться с коронной шестерней до того, как частота вращения выходного вала (коленчатый вал) двигателя становится нулевой. Таким образом, двигатель может проворачиваться раньше.
Когда электромотор приводится в действие до приведения в действие актуатора, нагрузка на электромотор является небольшой, поскольку двигатель не проворачивается сразу после приведения в действие электромотора. Следовательно, величина падения напряжения аккумулятора сразу после приведения в действие электромотора может быть небольшой. Тем не менее, в действительности, даже если напряжение аккумулятора является недостаточным, вероятно, что определяется то, что может быть выполнена остановка на холостом ходу. Следовательно, предпочтительно, чтобы определение того, следует или нет выполнять остановку на холостом ходу, выполнялось на основе напряжения после приведения в действие актуатора, т.е. напряжения во время проворачивания двигателя, а не напряжения аккумулятора сразу после приведения в действие электромотора.
Тем не менее, если частота вращения выходного вала двигателя является высокой или если коэффициент уменьшения частоты вращения выходного вала является небольшим, нагрузка на электромотор, когда двигатель проворачивается посредством введения ведущей шестерни в зацепление с коронной шестерней, может быть небольшой. В этом случае, например, даже если напряжение сразу после приведения в действие электромотора опускается ниже порогового значения, возможно то, что напряжение после приведения в действие актуатора не опускается ниже порогового значения. Следовательно, остановка на холостом ходу может быть выполнена несмотря на то, что напряжение аккумулятора фактически является недостаточным.
Настоящее изобретение заключается в том, чтобы ограничивать остановку двигателя, когда напряжение аккумулятора является недостаточным.
Решение задачи
В варианте осуществления система для запуска двигателя, который автоматически останавливается на основе предварительно определенного условия, включает в себя стартер, который запускает двигатель, аккумулятор, который подает электроэнергию в стартер, и устройство управления для стартера. Стартер включает в себя вторую шестерню, которая может зацепляться с первой шестерней, соединенной с коленчатым валом двигателя, актуатор, который перемещает, в состоянии приведения в действие, вторую шестерню в положение, в котором вторая шестерня зацепляется с первой шестерней, и электромотор, который вращает вторую шестерню. Устройство управления может приводить в действие каждый из актуатора и электромотора по отдельности, имеет режим вращения, в котором электромотор приводится в действие до приведения в действие актуатора, и ограничивает автоматическую остановку двигателя на основе меньшего напряжения из сниженного напряжения аккумулятора во время приведения в действие электромотора и сниженного напряжения аккумулятора после приведения в действие актуатора, когда выполняется режим вращения.
При этой конфигурации, даже когда величина падения напряжения после приведения в действие электромотора является небольшой, если величина падения напряжения после приведения в действие актуатора является большой, автоматическая остановка двигателя может ограничиваться. Наоборот, даже когда величина падения напряжения после приведения в действие актуатора является небольшой, если величина падения напряжения после приведения в действие электромотора является большой, автоматическая остановка двигателя может ограничиваться. Следовательно, когда напряжение аккумулятора является недостаточным, автоматическая остановка двигателя может ограничиваться, принимая во внимание любое падение напряжения.
В другом варианте осуществления устройство управления дополнительно имеет режим зацепления, в котором актуатор приводится в действие таким образом, что он вводит вторую шестерню в зацепление с первой шестерней до приведения в действие электромотора. Когда выполняется режим зацепления, автоматическая остановка двигателя ограничивается на основе сниженного напряжения после приведения в действие электромотора.
При этой конфигурации, например, когда частота вращения выходного вала двигателя является низкой, вторая шестерня зацепляется с первой шестерней до того, как вращается вторая шестерня, поскольку синхронизации между первой шестерней и второй шестерней не требуется. После того как вторая шестерня зацепляется с первой шестерней, вторая шестерня вращается и двигатель проворачивается. В этом случае напряжение после приведения в действие электромотора может быть ниже напряжения после приведения в действие актуатора. Следовательно, без отслеживания напряжения перед приведением в действие электромотора, если сниженное напряжение аккумулятора после приведения в действие электромотора опускается ниже порогового значения, остановка двигателя ограничивается. Таким образом, когда напряжение аккумулятора является недостаточным, остановка двигателя может ограничиваться.
В дополнительном варианте осуществления двигатель автоматически останавливается на основе предварительно определенного условия. Двигатель содержит стартер, включающий в себя вторую шестерню, которая может зацепляться с первой шестерней, соединенной с коленчатым валом, актуатор, который перемещает, в состоянии приведения в действие, вторую шестерню в положение, в котором вторая шестерня зацепляется с первой шестерней, и электромотор, который вращает вторую шестерню. Стартер снабжается электроэнергией из аккумулятора. Способ управления двигателем включает этапы: приведения в действие электромотора до приведения в действие актуатора; и ограничения автоматической остановки двигателя на основе меньшего напряжения из сниженного напряжения аккумулятора после приведения в действие электромотора и сниженного напряжения аккумулятора после приведения в действие актуатора.
При этой конфигурации, даже когда величина падения напряжения после приведения в действие электромотора является небольшой, если величина падения напряжения после приведения в действие актуатора является большой, автоматическая остановка двигателя может ограничиваться. Наоборот, даже когда величина падения напряжения после приведения в действие актуатора является небольшой, если величина падения напряжения после приведения в действие электромотора является большой, автоматическая остановка двигателя может ограничиваться. Следовательно, когда напряжение аккумулятора является недостаточным, автоматическая остановка двигателя может ограничиваться, принимая во внимание любое падение напряжения.
Преимущества изобретения
Даже когда величина падения напряжения после приведения в действие электромотора является небольшой, если величина падения напряжения после приведения в действие актуатора является большой, автоматическая остановка двигателя может ограничиваться. Наоборот, даже когда величина падения напряжения после приведения в действие актуатора является небольшой, если величина падения напряжения после приведения в действие электромотора является большой, автоматическая остановка двигателя может ограничиваться. Следовательно, когда напряжение аккумулятора является недостаточным, автоматическая остановка двигателя может ограничиваться, принимая во внимание любое падение напряжения.
Краткое описание чертежей
Фиг. 1 - общая блок-схема транспортного средства;
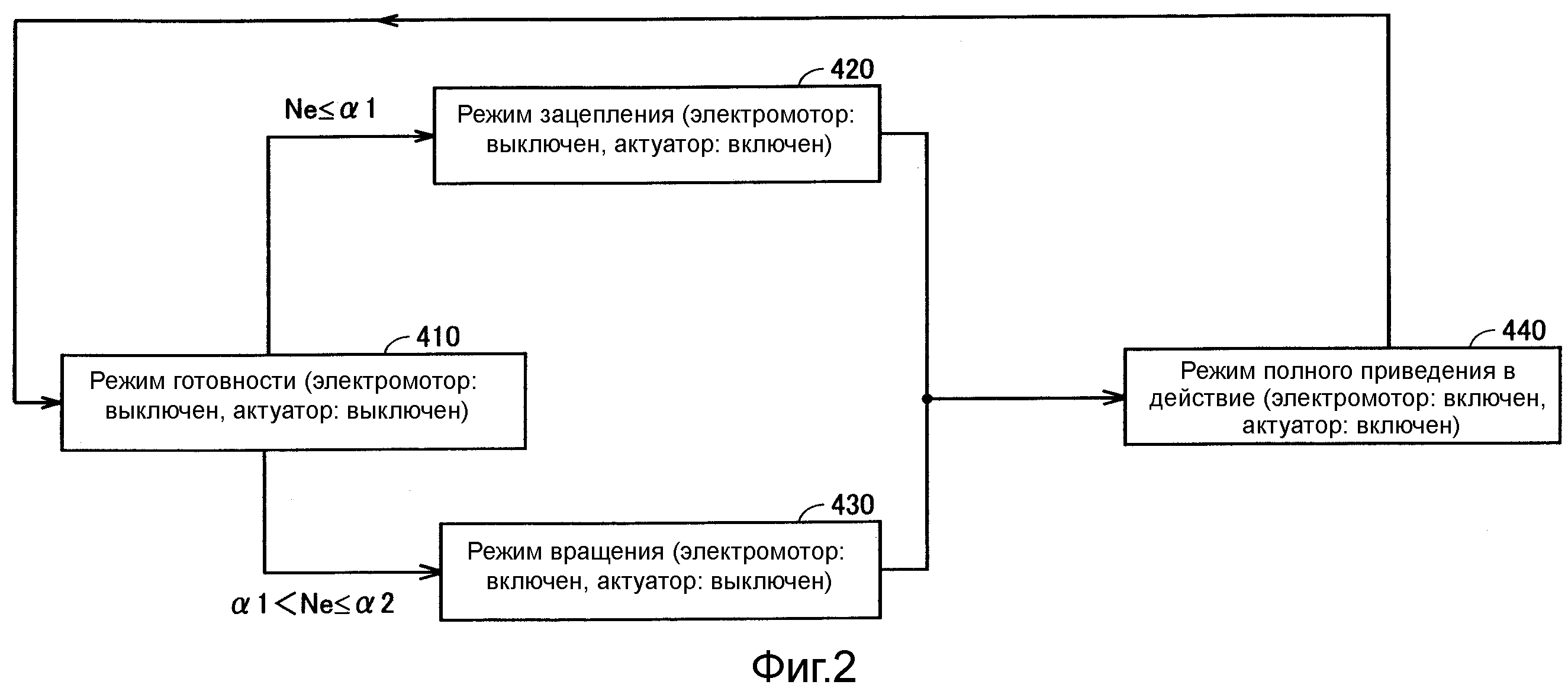
Фиг. 2 - схема для пояснения смены рабочих режимов стартера;
Фиг. 3 - схема для пояснения режимов приведения в действие во время операции запуска двигателя;
Фиг. 4 - схема, показывающая напряжение аккумулятора в первом режиме;
Фиг. 5 - схема, показывающая напряжение аккумулятора во втором режиме;
Фиг. 6 - первая блок-схема последовательности операций способа, показывающая процессы, выполняемые посредством ЭМУ; и
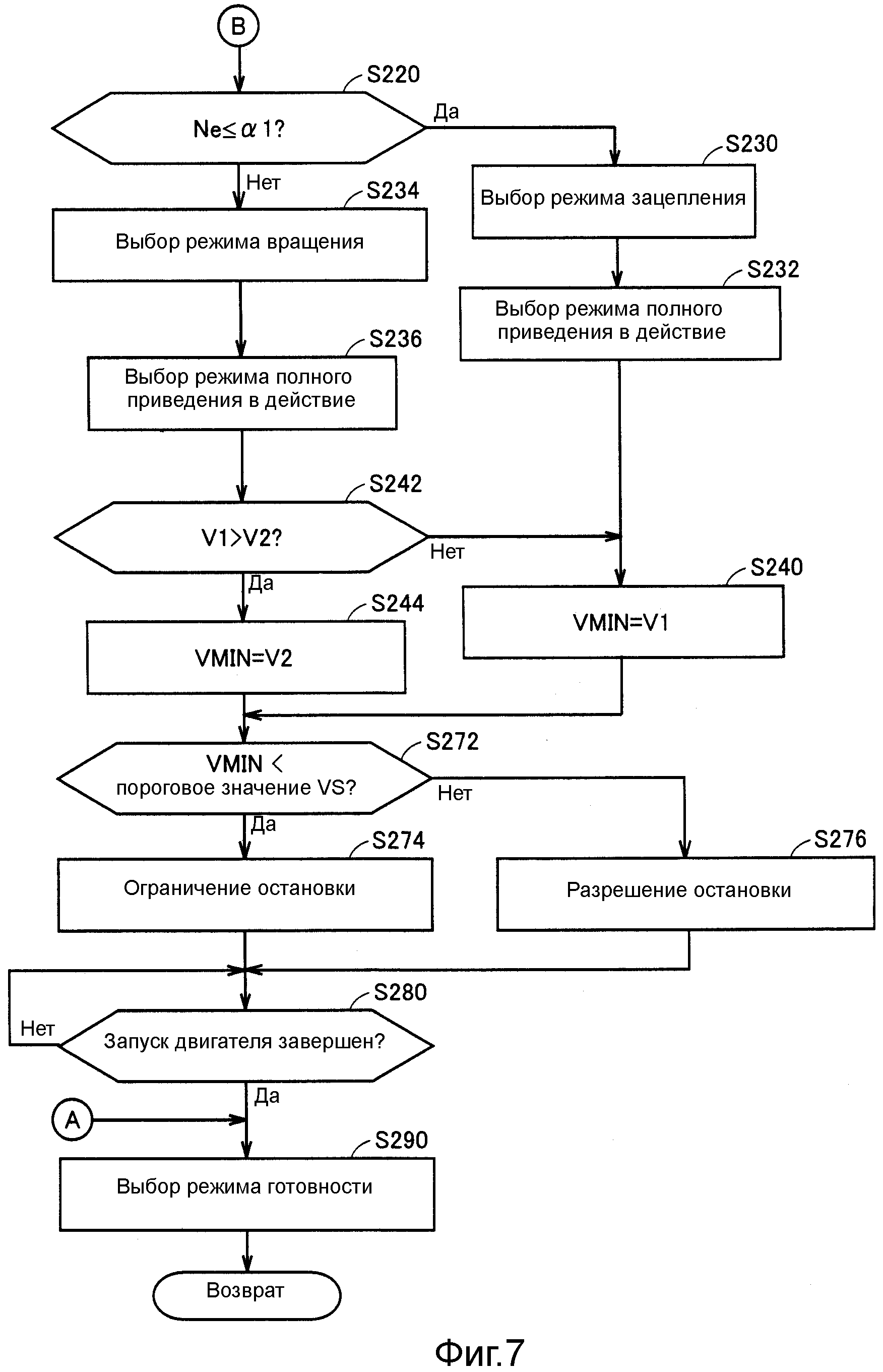
Фиг. 7 - вторая блок-схема последовательности операций способа, показывающая процессы, выполняемые посредством ЭМУ.
Подробное описание вариантов осуществления изобретения
Далее со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения. В последующем описании идентичные элементы будут обозначены одинаковыми ссылочными позициями. Их названия и функции также являются идентичными. Следовательно, их подробное описание повторно не приводится.
Фиг. 1 является общей блок-схемой транспортного средства 10. Как показано на фиг. 1, транспортное средство 10 включает в себя двигатель 100, аккумулятор 120, стартер 200, электронный модуль 300 управления (ЭМУ) и реле RY1 и RY2. Стартер 200 включает в себя плунжер 210, электромотор 220, соленоид 230, соединительный модуль 240, выходной элемент 250 и ведущую шестерню 260.
Двигатель 100 формирует движущую силу для движения транспортного средства 10. Коленчатый вал 111 двигателя 100 соединяется с ведущими колесами через силовую трансмиссию, сконфигурированную так, что она включает в себя муфту, редуктор и т.п.
Двигатель 100 содержит датчик 115 частоты вращения. Датчик 115 частоты вращения определяет частоту Ne вращения двигателя 100 и выводит результат определения в ЭМУ 300.
Аккумулятор 120 является элементом накопления электроэнергии, который может допускать зарядку и разрядку. Аккумулятор 120 может включать в себя аккумуляторную батарею, такую как ионно-литиевый аккумулятор, никель-металлогидридный аккумулятор или свинцовый аккумулятор. Аккумулятор 120 может быть сконфигурирован с помощью такого элемента накопления мощности, как электрический двухслойный конденсатор.
Аккумулятор 120 соединяется со статором 200 через реле RY1, RY2, управляемое посредством ЭМУ 300. Аккумулятор 120 затем подает напряжение питания для приведения в действие в статор 200, когда замыкаются реле RY1, RY2. Отрицательный электрод аккумулятора 120 соединяется с "землей" кузова транспортного средства 10.
Аккумулятор 120 содержит датчик 125 напряжения. Датчик 125 напряжения определяет выходное напряжение VB аккумулятора 120 и выводит определенное значение в ЭМУ 300.
Напряжение аккумулятора 120 подается в ЭМУ 300 и во вспомогательное оборудование, к примеру, инвертор кондиционера через преобразователь 127 постоянного тока.
Один конец реле RY1 соединяется с положительным электродом аккумулятора 120, а другой конец реле RY1 соединяется с одним концом соленоида 230 в статоре 200. Реле RY1 управляется посредством управляющего сигнала SE1 из ЭМУ 300 и переключает подачу и прекращение подачи напряжения питания из аккумулятора 120 в соленоид 230.
Один конец реле RY2 соединяется с положительным электродом аккумулятора 120, а другой конец реле RY2 соединяется с электромотором 220 в стартере 200. Реле RY2 управляется посредством управляющего сигнала SE2 из ЭМУ 300 и переключает подачу и прекращение подачи напряжения питания из аккумулятора 120 в электромотор 220. Датчик 130 напряжения предоставляется на линии питания, соединяющей реле RY2 и электромотор 220. Датчик 130 напряжения определяет напряжение VM электромотора и выводит определенное значение в ЭМУ 300.
Как описано выше, подача напряжения питания в электромотор 220 и соленоид 230 в стартере 200 может независимо управляться посредством реле RY1 и RY2.
Выходной элемент 250 соединяется с вращательным валом ротора (не показан) в электромоторе, например, через прямой шлиц. Ведущая шестерня 260 предоставляется в выходном элементе 250 на конце, противостоящем электромотору 220. Когда замыкается реле RY2, напряжение питания подается из аккумулятора 120 и электромотор 220 вращается. Затем выходной элемент 250 передает вращательное движение ротора на ведущую шестерню 260, чтобы вращать ведущую шестерню 260.
Один конец соленоида 230 соединяется с реле RY1, а другой конец соленоида 230 соединяется с "землей" кузова, как описано выше. Когда замыкается реле RY1 и возбуждается соленоид 230, соленоид 230 втягивает плунжер 210 в направлении стрелки. Другими словами, плунжер 210 и соленоид 230 составляют актуатор 232.
Плунжер 210 соединяется с выходным элементом 250 через соединительный модуль 240. Соленоид 230 возбуждается, чтобы принудительно втягивать плунжер 210 в направлении стрелки. Таким образом, выходной элемент 250 перемещается посредством соединительного модуля 240, имеющего зафиксированную опору 245, из положения готовности, показанного на фиг. 1, в направлении, противоположном рабочему направлению плунжера 210, т.е. в направлении, в котором ведущая шестерня 260 отходит от корпуса электромотора 220. Плунжер 210 смещается с помощью силы в направлении, противоположном стрелке на фиг. 1, посредством непоказанного пружинного механизма и возвращается в положение готовности, когда соленоид 230 становится невозбужденным.
Когда выходной элемент 250 перемещается в осевом направлении посредством возбуждения соленоида 230 таким образом, ведущая шестерня 260 зацепляется с коронной шестерней 110, предоставляемой на внешней периферии маховика или ведущего диска, присоединенного к коленчатому валу 111 двигателя 100. Затем ведущая шестерня 260 управляется с возможностью вращения в состоянии, в котором ведущая шестерня 260 и коронная шестерня 110 находятся в зацеплении, посредством чего двигатель 100 проворачивается, и двигатель 100 запускается.
Таким образом, в настоящем варианте осуществления актуатор 232, который перемещает ведущую шестерню 260 так, что она зацепляется с коронной шестерней 110, предоставляемой на внешней периферии маховика или ведущего диска двигателя 100, и электромотор 220, который вращает ведущую шестерню 260, управляются по отдельности.
Хотя это и не показано на фиг. 1, односторонняя муфта может предоставляться между выходным элементом 250 и валом ротора электромотора 220 так, что она не допускает вращения ротора электромотора 220 посредством вращательного движения коронной шестерни 110.
Актуатор 232 на фиг. 1 не ограничен механизмом, описанным выше, при условии, что он имеет механизм, допускающий передачу вращения ведущей шестерни 260 на коронную шестерню 110 и переключение состояния, в котором ведущая шестерня 260 и коронная шестерня 110 находятся в зацеплении, и состояния, в котором они не находятся в зацеплении. Например, актуатор 232 может иметь такой механизм, в котором ведущая шестерня 260 и коронная шестерня 110 вводятся в зацепление посредством перемещения вала выходного элемента 250 в радиальном направлении ведущей шестерни 260.
ЭМУ 300 включает в себя центральный процессор (ЦП), запоминающее устройство и буфер ввода-вывода, которые не показаны, чтобы выполнять ввод от каждого датчика и вывод команды управления в каждое оборудование. Управление ими не ограничено обработкой посредством программного обеспечения, и часть управления может быть обработана посредством разработки специализированных аппаратных средств (электронной схемы).
ЭМУ 300 принимает сигнал ACC, представляющий рабочую величину хода педали 140 акселератора, из датчика (не показан), предоставляемого для педали 140 акселератора. ЭМУ 300 принимает сигнал BRK, представляющий рабочую величину хода педали 150 тормоза, из датчика (не показан), предоставляемого для педали 150 тормоза. ЭМУ 300 также принимает сигнал IG-ON операции запуска, активируемый при операции включения зажигания водителем. ЭМУ 300 формирует сигнал запроса на запуск и сигнал запроса на остановку для двигателя 100 на основе этой информации и выводит управляющие сигналы SE1 и SE2 в соответствии с ними, чтобы управлять работой стартера 200.
Например, когда удовлетворяются условия остановки, при которых транспортное средство остановлено, педаль 150 тормоза управляется водителем и остановка двигателя 100 не ограничена (разрешается), формируется сигнал запроса на остановку, так что ЭМУ 300 останавливает двигатель 100. Иными словами, когда удовлетворяются условия остановки, впрыск топлива и сгорание в двигателе 100 прекращаются.
После этого, когда удовлетворяется условие запуска, при котором рабочая величина хода педали 150 тормоза от водителя является нулевой, формируется сигнал запроса на запуск, так что ЭМУ 300 приводит в действие электромотор 220, чтобы проворачивать двигатель 100. В других случаях двигатель 100 может проворачиваться, когда управляется педаль 140 акселератора, рычаг переключения передач для выбора диапазона трансмиссии либо шестерня или переключатель для выбора режима движения транспортного средства (например, мощностного режима или экономичного режима).
Когда удовлетворяется условие запуска двигателя 100, ЭМУ 300 управляет актуатором 232 и электромотором 220 в одном из первого режима, в котором актуатор 232 и электромотор 220 управляются таким образом, что ведущая шестерня 260 начинает вращение после того, как ведущая шестерня 260 перемещается в направлении коронной шестерни 110, и второго режима, в котором актуатор 232 и электромотор 220 управляются таким образом, что ведущая шестерня 260 перемещается в направлении коронной шестерни 110 после того, как ведущая шестерня 260 начинает вращение.
Как описано ниже, ЭМУ 300 управляет актуатором 232 и электромотором 220 в первом режиме, когда частота Ne вращения двигателя равна или меньше предварительно определенного первого опорного значения α1. ЭМУ 300 управляет актуатором 232 и электромотором 220 во втором режиме, когда частота Ne вращения двигателя превышает первое опорное значение α1.
Фиг. 2 является схемой для пояснения смены рабочих режимов стартера 200 в настоящем варианте осуществления. Рабочие режимы стартера 200 в настоящем варианте осуществления включают в себя режим 410 готовности, режим 420 зацепления, режим 430 вращения и режим 440 полного приведения в действие.
Первый режим, описанный выше, представляет собой режим для переключения в режим 440 полного приведения в действие через режим 420 зацепления. Второй режим представляет собой режим для переключения в режим 440 полного приведения в действие через режим 430 вращения.
Режим 410 готовности представляет состояние, в котором ни актуатор 232, ни электромотор 220 стартера 200 не приводятся в действие, т.е. состояние, в котором запрос на запуск двигателя не выводится в стартер 200. Режим 410 готовности соответствует начальному состоянию стартера 200 и выбирается в случае, если приведение в действие стартера 200 является необязательным, например до операции запуска двигателя 100, после того, как запуск двигателя 100 завершен, и когда запуск двигателя 100 выполнен неудачно.
Режим 440 полного приведения в действие представляет состояние, в котором приводятся в действие как актуатор 232, так и электромотор 220 стартера 200. В этом режиме 440 полного приведения в действие ведущая шестерня 260 вращается посредством электромотора 220 в состоянии, в котором ведущая шестерня 260 и коронная шестерня 110 находятся в зацеплении. Таким образом, двигатель 100 фактически проворачивается, и начинается операция запуска.
Стартер 200 в настоящем варианте осуществления может независимо приводить в действие каждый из актуатора 232 и электромотора 220, как описано выше. Следовательно, в процессе перехода из режима 410 готовности в режим 440 полного приведения в действие возникает случай, в котором актуатор 232 приводится в действие до приведения в действие электромотора 220 (т.е. согласно режиму 420 зацепления), и случай, в котором электромотор 220 приводится в действие до приведения в действие актуатора 232 (т.е. согласно режиму 430 вращения).
Выбор между режимом 420 зацепления и режимом 430 вращения по существу выполняется на основе частоты Ne вращения двигателя 100, когда формируется запрос на то, чтобы повторно запускать двигатель 100.
Режим 420 зацепления представляет собой состояние, в котором приводится в действие только актуатор 232, а электромотор 220 не приводится в действие. Этот режим выбирается, когда ведущая шестерня 260 и коронная шестерня 110 могут зацепляться друг с другом даже в состоянии, в котором ведущая шестерня 260 остановлена. В частности, этот режим 420 зацепления выбирается в состоянии, в котором двигатель 100 остановлен, или в состоянии, в котором частота Ne вращения двигателя 100 в достаточной степени уменьшается (Ne ≤ первое опорное значение α1).
С другой стороны, режим 430 вращения представляет собой состояние, в котором приводится в действие только электромотор 220, а актуатор 232 не приводится в действие. Этот режим выбирается, например, когда частота Ne вращения двигателя 100 является относительно высокой (α1 Таким образом, когда частота Ne вращения двигателя 100 является высокой, разность частот между ведущей шестерней 260 и коронной шестерней 110 является большой при поддержании ведущей шестерни 260 остановленной, так что может быть затруднено зацепление между ведущей шестерней 260 и коронной шестерней 110. Следовательно, в режиме 430 вращения только электромотор 220 приводится в действие до приведения в действие актуатора 232 и частота вращения коронной шестерни 110 и частота вращения ведущей шестерни 260 приводятся в синхронизацию друг с другом. Затем в ответ на достаточное уменьшение разности между частотой вращения коронной шестерни 110 и частотой вращения ведущей шестерни 260 актуатор 232 приводится в действие таким образом, что он вводит коронную шестерню 110 и ведущую шестерню 260 в зацепление друг с другом. Затем рабочий режим переключается из режима 430 вращения в режим 440 полного приведения в действие. В случае режима 440 полного приведения в действие в ответ на завершение запуска двигателя 100 и начало работы в режиме автономной работы двигателя 100 рабочий режим возвращается из режима 440 полного приведения в действие в режим 410 готовности. Таким образом, когда выводится сигнал запроса на то, чтобы запускать двигатель 100, т.е. когда определяется то, что двигатель 100 должен быть запущен, актуатор 232 и электромотор 220 управляются в одном из первого режима для переключения в режим 440 полного приведения в действие через режим 420 зацепления и второго режима для переключения в режим 440 полного приведения в действие через режим 430 вращения. Фиг. 3 является схемой для пояснения двух режимов приведения в действие (первого режима, второго режима) во время операции запуска двигателя в настоящем варианте осуществления. На фиг. 3 горизонтальная ось показывает время, а вертикальная ось показывает частоту Ne вращения двигателя 100 и состояния приведения в действие актуатора 232 и электромотора 220 во время первого режима и во время второго режима. Предполагается, что во время t0, например, удовлетворяются условия остановки, при которых транспортное средство остановлено, и педаль 150 тормоза управляется водителем, посредством чего формируется запрос на то, чтобы останавливать двигатель 100, и двигатель 100 останавливается (прекращается впрыск топлива и зажигание). В этом случае, если двигатель 100 не запускается повторно, частота Ne вращения двигателя 100 постепенно снижается и вращение двигателя 100 в итоге прекращается, как указано посредством сплошной кривой W0. Далее предполагается, что в то время, как частота Ne вращения двигателя 100 снижается, например, удовлетворяется условие запуска, при котором рабочая величина хода педали 150 тормоза от водителя становится нулевой, посредством чего формируется запрос на то, чтобы повторно запускать двигатель 100. Этот случай классифицируется на три области в зависимости от частоты Ne вращения двигателя 100. Первая область (область 1) представляет собой случай, в котором частота Ne вращения двигателя 100 выше второго опорного значения α2, и представляет собой, например, состояние, в котором условие запуска удовлетворяется в точке P0 на фиг. 3, и формируется запрос на повторный запуск. Область 1 представляет собой область, в которой частота Ne вращения двигателя 100 является достаточно высокой, так что двигатель 100 может быть запущен через операцию впрыска топлива и зажигания даже без использования стартера 200. Другими словами, она представляет собой область, в которой двигатель 100 может восстанавливаться самостоятельно. Следовательно, в области 1 приведение в действие стартера 200 ограничивается, более конкретно, запрещается. Следует отметить, что вышеуказанное второе опорное значение α2 может быть ограничено посредством максимальной частоты вращения электромотора 220. Вторая область (область 2) представляет собой случай, в котором частота Ne вращения двигателя 100 находится между первым опорным значением α1 и вторым опорным значением α2, и представляет собой состояние, в котором условие запуска удовлетворяется в точке P1 на фиг. 3, и формируется запрос на повторный запуск. Область 2 представляет собой область, в которой двигатель 100 не может восстанавливать работу самостоятельно, но частота Ne вращения двигателя 100 является относительно высокой. В этой области выбирается режим вращения, как описано на фиг. 2. Во время t2, когда формируется запрос на то, чтобы повторно запускать двигатель 100, во-первых, электромотор 220 приводится в действие после того, как прошло предписанное время. Таким образом, ведущая шестерня 260 начинает вращение. Затем, во время t4, актуатор 232 приводится в действие. Затем, когда коронная шестерня 110 и ведущая шестерня 260 вводятся в зацепление, двигатель 100 проворачивается и частота Ne вращения двигателя 100 увеличивается, как указано посредством пунктирной кривой W1. После этого, когда двигатель 100 возобновляет работу в режиме автономной работы, приведение в действие актуатора 232 и электромотора 220 прекращается. Третья область (область 3) представляет собой случай, в котором частота Ne вращения двигателя 100 ниже первого опорного значения α1, и представляет собой, например, состояние, в котором условие запуска удовлетворяется в точке P2 на фиг. 3, и формируется запрос на повторный запуск. Область 3 представляет собой область, в которой частота Ne вращения двигателя 100 является низкой и ведущая шестерня 260 и коронная шестерня 110 могут зацепляться друг с другом даже без синхронизации ведущей шестерни 260. В этой области выбирается режим зацепления, как описано на фиг. 2. Во время t5, когда формируется запрос на то, чтобы повторно запускать двигатель 100, во-первых, актуатор 232 приводится в действие после того, как прошло предписанное время. Таким образом, ведущая шестерня 260 подталкивается в направлении коронной шестерни 110. После этого электромотор 220 приводится в действие (время t7 на фиг. 3). Таким образом, двигатель 100 проворачивается, и частота Ne вращения двигателя 100 увеличивается, как указано посредством пунктирной кривой W2. После этого, когда двигатель 100 возобновляет работу в режиме автономной работы, приведение в действие актуатора 232 и электромотора 220 прекращается. Таким образом, управление повторным запуском двигателем 100 выполняется с использованием стартера 200, допускающего независимое приведение в действие актуатора 232 и электромотора 220, так что двигатель 100 может быть повторно запущен за меньшее время, чем с помощью традиционного стартера, в котором операция повторного запуска двигателя 100 запрещается в течение периода (Tinh) от частоты вращения, при которой невозможно самостоятельное восстановление работы двигателя 100 (время t1 на фиг. 3), до остановки двигателя 100 (время t8 на фиг. 3). Соответственно, может быть уменьшено некомфортное ощущение водителя, вызываемое за счет задержки повторного запуска двигателя. Как показано на фиг. 4, когда двигатель 100 повторно запускается в первом режиме, внезапно увеличивается нагрузка на электромотор 220. Следовательно, напряжение аккумулятора 120 для подачи электроэнергии в электромотор 220 и актуатор 232 может быть временно существенно уменьшено после того, как электромотор 220 приводится в действие. Падение напряжения аккумулятора 120 является нежелательным, поскольку аккумулятор 120 подает электроэнергию не только в электромотор 220, но также и во вспомогательное оборудование. Затем в настоящем варианте осуществления, когда двигатель 100 повторно запускается в первом режиме, если сниженное напряжение аккумулятора 120 после того, как электромотор 220 приводится в действие, опускается ниже порогового значения VS, остановка двигателя 100 после этого ограничивается. Более конкретно, автоматическая остановка двигателя 100, т.е. остановка на холостом ходу или экономичный режим работы, запрещается. Альтернативно, может быть уменьшена частота автоматической остановки двигателя 100. Например, когда наименьшее значение V1 напряжения аккумулятора 120 во время приведения в действие электромотора 220 равно или меньше порогового значения VS, определяется то, что напряжение аккумулятора 120 опускается ниже порогового значения VS. Когда двигатель 100 повторно запускается в первом режиме, напряжение после приведения в действие электромотора 220 может быть ниже напряжения после приведения в действие актуатора 232. Следовательно, без отслеживания напряжения перед приведением в действие электромотора 220, если напряжение аккумулятора 120, которое снижается после приведения в действие электромотора 220, опускается ниже порогового значения VS, остановка двигателя 100 ограничивается. Следовательно, когда напряжение аккумулятора 100 является недостаточным, автоматическая остановка двигателя 100 может ограничиваться. Аналогично, как показано на фиг. 5, когда двигатель 100 повторно запускается во втором режиме, после того, как электромотор 220 приводится в действие, и помимо этого, после того, как актуатор 232 приводится в действие, чтобы начинать проворачивание коленчатого вала, напряжение аккумулятора 120 может быть временно существенно уменьшено вследствие внезапного увеличения нагрузки на электромотор 220. Когда двигатель 100 повторно запускается во втором режиме, если из сниженного напряжения аккумулятора 120 после приведения в действие электромотора 220 и сниженного напряжения аккумулятора 120 после приведения в действие актуатора 232 меньшее напряжение опускается ниже порогового значения VS, остановка двигателя 100 после этого ограничивается. Например, если из наименьшего значения V1 напряжения аккумулятора 120 в период после приведения в действие электромотора 220 и перед приведением в действие актуатора 232 и наименьшего значения V2 напряжения аккумулятора 120 в период после приведения в действие актуатора 232 меньшее напряжение равно или меньше порогового значения VS, остановка двигателя 100 после этого ограничивается. Соответственно, даже когда величина падения напряжения после приведения в действие электромотора 220 является небольшой, если величина падения напряжения после приведения в действие актуатора 232 является большой, автоматическая остановка двигателя 100 может ограничиваться. Наоборот, даже когда величина падения напряжения после приведения в действие актуатора 232 является небольшой, если величина падения напряжения после приведения в действие электромотора 220 является большой, автоматическая остановка двигателя 100 может ограничиваться. Следовательно, когда напряжение аккумулятора 120 является недостаточным, автоматическая остановка двигателя 100 может ограничиваться, принимая во внимание любое падение напряжения. Остановка на холостом ходу или экономичный режим работы может ограничиваться до тех пор, пока снова не принимается сигнал IG-OFF, или может ограничиваться до тех пор, пока запоминающее устройство ЭМУ 300 не сбрасывается вследствие замены аккумулятора 120. Далее со ссылкой на фиг. 6 и 7 будет описан процесс, выполняемый посредством ЭМУ 300 для остановки двигателя и запуска двигателя 100. Блок-схемы последовательности операций способа, показанные на фиг. 6 и 7, реализуются посредством выполнения с предписанными интервалами программы, предварительно сохраненной в ЭМУ 300. Альтернативно, для части этапов процесс может быть реализован посредством разработки специализированных аппаратных средств (электронной схемы). На этапе (этап в дальнейшем сокращается как этап S) 100 ЭМУ 300 определяет, работает или нет двигатель 100. Если двигатель 100 работает ("Да" на этапе S100), на этапе S102 ЭМУ 300 определяет, удовлетворяется или нет условие остановки двигателя 100. Иными словами, определяется, следует или нет останавливать двигатель 100. Если условие остановки двигателя 100 не удовлетворяется ("Нет" на этапе S102), например, поскольку остановка двигателя 100 ограничивается, операция двигателя 100 продолжается. В этом случае процесс переходит к этапу S290 и ЭМУ 300 выбирает режим готовности в качестве рабочего режима стартера 200. Если условие остановки двигателя 100 удовлетворяется ("Да" на этапе S102), поскольку остановка двигателя 100 не ограничивается, на этапе S104 ЭМУ 300 останавливает двигатель 100. Следовательно, впрыск топлива и сгорание в двигателе 100 прекращаются. После этого на этапе S200 ЭМУ 300 определяет, удовлетворяется или нет условие запуска двигателя 100. Иными словами, определяется, следует или нет запускать двигатель 100. Если условие запуска двигателя 100 не удовлетворяется ("Нет" на этапе S200), операция запуска двигателя 100 является необязательной. В этом случае процесс переходит к этапу S290 и ЭМУ 300 выбирает режим готовности в качестве рабочего режима стартера 200. Если условие запуска двигателя 100 удовлетворяется ("Да" на этапе S200), процесс переходит к этапу S210. Затем ЭМУ 300 определяет, равна или меньше либо нет частота Ne вращения двигателя 100 второго опорного значения α2. Если частота Ne вращения двигателя 100 превышает второе опорное значение α2 ("Нет" на этапе S210), частота Ne вращения двигателя соответствует области 1 на фиг. 3, в которой возможно самостоятельное восстановление работы двигателя 100. Следовательно, ЭМУ 300 переходит к этапу S212 и выбирает режим готовности. После этого на этапе S214 ЭМУ 300 возобновляет впрыск топлива и сгорание с тем, чтобы повторно запускать двигатель 100. Если частота Ne вращения двигателя 100 равна или меньше второго опорного значения α2 ("Да" на этапе S210), на этапе S220 ЭМУ 300 определяет, равна или меньше либо нет частота Ne вращения двигателя 100 первого опорного значения α1 (0<α1). Если частота Ne вращения двигателя 100 равна или меньше первого опорного значения α1 ("Да" на этапе S220), частота Ne вращения двигателя включается в область 3 на фиг. 3. Следовательно, процесс переходит к этапу S230, и ЭМУ 300 выбирает режим зацепления в качестве рабочего режима стартера 200. Затем ЭМУ 300 выводит управляющий сигнал SE1, чтобы замыкать реле RY1, тем самым приводя в действие актуатор 232. Здесь электромотор 220 не приводится в действие. После этого процесс переходит к этапу S232 и ЭМУ 300 выбирает режим полного приведения в действие в качестве рабочего режима стартера 200. Затем электромотор 220 приводится в действие так, что он проворачивает двигатель 100. В случае если актуатор 232 приводится в действие до электромотора 220, напряжение после приведения в действие электромотора 220 и начала проворачивания коленчатого вала может быть ниже напряжения после приведения в действие актуатора 232. Следовательно, необязательно отслеживать напряжение до приведения в действие электромотора 220. Таким образом, в 240 наименьшее значение V1 сниженного напряжения аккумулятора 120 после того, как электромотор 220 приводится в действие, задается равным минимальному значению VMIN для определения того, следует или нет останавливать двигатель 100. Если минимальное значение VMIN опускается ниже порогового значения VS ("Да" на этапе S272), на этапе S274 ЭМУ 300 ограничивает остановку двигателя 100. Соответственно, когда напряжение аккумулятора 100 является недостаточным, автоматическая остановка двигателя 100 ограничивается. Когда остановка двигателя 100 ограничивается, условие остановки после этого не удовлетворяется. Следовательно, автоматическая остановка двигателя 100, т.е. остановка на холостом ходу или экономичный режим работы, ограничивается и двигатель 100 продолжает работать. Если минимальное значение VMIN не опускается ниже порогового значения VS ("Нет" на этапе S272), на этапе S276 ЭМУ 300 разрешает остановку двигателя 100. Затем на этапе S280 ЭМУ 300 определяет то, завершен или нет запуск двигателя 100. Определение в отношении того, завершен или нет запуск двигателя 100, может быть выполнено посредством определения того, превышает или нет частота вращения двигателя пороговое значение γ, указывающее работу в режиме автономной работы, после того как прошло предписанное время с момента начала приведения в действие электромотора 220. Если запуск двигателя 100 не завершен ("Нет" на этапе S280), проворачивание двигателя 100 продолжается. Если запуск двигателя 100 завершен ("Да" на этапе S280), процесс переходит к этапу S290 и ЭМУ 300 выбирает режим готовности в качестве рабочего режима стартера 200. Если частота Ne вращения двигателя 100 превышает первое опорное значение α1 ("Нет" на этапе S220), на этапе S234 ЭМУ 300 выбирает режим вращения в качестве рабочего режима стартера 200. Затем ЭМУ 300 выводит управляющий сигнал SE2, чтобы замыкать реле RY2, тем самым приводя в действие электромотор 220. Здесь, актуатор 232 не приводится в действие. Затем на этапе S236 ЭМУ 300 выбирает режим полного приведения в действие в качестве рабочего режима стартера 200. Соответственно, актуатор 232 приводится в действие таким образом, что он вводит ведущую шестерню 260 и коронную шестерню 110 в зацепление, так что двигатель 100 проворачивается. В общем, потребление мощности электромотора 220 превышает потребление мощности другого электрооборудования, например актуатора 232. Тем не менее, величина падения напряжения аккумулятора 120 может быть небольшой независимо от недостаточного напряжения аккумулятора 120, поскольку нагрузка на электромотор 220 является небольшой до того, как ведущая шестерня 260 и коронная шестерня 110 зацепляются друг с другом. Наоборот, когда ведущая шестерня 260 и коронная шестерня 110 находятся в зацеплении, нагрузка на электромотор 220, требуемая для проворачивания, может быть небольшой, поскольку частота вращения ведущей шестерни 260 и частота вращения коронной шестерни 110 синхронизированы друг с другом. Также в этом случае величина падения напряжения аккумулятора 120 может быть небольшой независимо от недостаточного напряжения аккумулятора 120. Затем в настоящем варианте осуществления, если наименьшее значение V1 напряжения аккумулятора 120 в период перед приведением в действие актуатора 232 ниже наименьшего значения V2 напряжения аккумулятора 120 в период после приведения в действие актуатора 232 ("Нет" на этапе S242), на этапе S240 наименьшее значение V1 задается равным минимальному значению VMIN для определения того, следует или нет останавливать двигатель 100. С другой стороны, если наименьшее значение V2 напряжения аккумулятора 120 в период после приведения в действие актуатора 232 ниже наименьшего значения V1 напряжения аккумулятора 120 в период перед приведением в действие актуатора 232 ("Да" на этапе S242), на этапе S244 наименьшее значение V2 задается равным минимальному значению VMIN для определения того, следует или нет останавливать двигатель 100. Если минимальное значение VMIN опускается ниже порогового значения VS ("Да" на этапе S272), на этапе S274 ЭМУ 300 ограничивает остановку двигателя 100. Следовательно, даже когда величина падения напряжения после приведения в действие электромотора 220 является небольшой, если величина падения напряжения после приведения в действие актуатора 232 является большой, автоматическая остановка двигателя 100 может ограничиваться. Наоборот, даже когда величина падения напряжения после приведения в действие актуатора 232 является небольшой, если величина падения напряжения после приведения в действие электромотора 220 является большой, автоматическая остановка двигателя 100 может ограничиваться. Если запуск двигателя 100 завершен ("Да" на этапе S280), процесс переходит к этапу S290 и ЭМУ 300 выбирает режим готовности в качестве рабочего режима стартера 200. Вариант осуществления, раскрытый здесь, должен пониматься как иллюстративный, а не ограничивающий, во всех отношениях. Объем настоящего изобретения определяется не вышеприведенным описанием, а формулой изобретения, и подразумевается, что все модификации, которые подпадают под смысл и диапазон эквивалентности в формуле изобретения, охватываются в данном документе. Перечень ссылочных позиций 10 - транспортное средство, 100 - двигатель, 110 - коронная шестерня, 111 - коленчатый вал, 115 - датчик частоты вращения, 120 - аккумулятор, 125, 130 - датчик напряжения, 140 - педаль акселератора, 150 - педаль тормоза, 160 - силовая трансмиссия, 170 - ведущее колесо, 200, 202 - стартер, 210 - плунжер, 220 - электромотор, 230 - соленоид, 232 - актуатор, 240 - соединительный модуль, 245 - опора, 250 - выходной элемент, 260 - ведущая шестерня, 270 - односторонняя муфта, 300 - ЭМУ, 410 - режим готовности, 420 - режим зацепления, 430 - режим вращения, 440 - режим полного приведения в действие, RY1, RY2 - реле.
Реферат
Изобретение может быть использовано в двигателях внутреннего сгорания. Система запуска предназначена для двигателя, который автоматически останавливается на основе предварительно определенного условия. Система запуска содержит стартер, который запускает двигатель, аккумулятор, который подает электроэнергию в стартер, и устройство управления для стартера. Стартер включает в себя вторую шестерню, входящую в зацепление с первой шестерней, соединенной с коленчатым валом двигателя, актуатор, который при приведении его в действие обеспечивает перемещение второй шестерни для соединения ее с первой шестерней, и электромотор, который вращает вторую шестерню. Устройство управления выполнено с возможностью приведения в действие актуатора и электромотора по отдельности. Устройство управления имеет режим вращения, при котором электромотор приводится в действие до приведения в действие актуатора, и в случае, когда выполняется режим вращения, ограничивает автоматическую остановку двигателя на основе меньшего напряжения из сниженного напряжения аккумулятора после приведения в действие электромотора и сниженного напряжения аккумулятора после приведения в действие актуатора. Раскрыт способ управления двигателя. Технический результат заключается в ограничении остановки двигателя в случае, когда напряжение аккумулятора недостаточно. 2 н. и 2 з.п. ф-лы, 7 ил.
Формула
стартер, который запускает двигатель;
аккумулятор, который подает электроэнергию в стартер; и
устройство управления для стартера,
причем стартер включает в себя:
- вторую шестерню, зацепляемую с первой шестерней, соединенной с коленчатым валом двигателя,
- актуатор, который перемещает, в состоянии приведения в действие, вторую шестерню в положение, в котором вторая шестерня зацепляется с первой шестерней, и
- электромотор, который вращает вторую шестерню,
при этом устройство управления:
- выполнено с возможностью приведения в действие каждого из актуатора и электромотора по отдельности,
- имеет режим вращения, при котором электромотор приводится в действие до приведения в действие актуатора, и
- когда выполняется режим вращения, ограничивает автоматическую остановку двигателя на основе меньшего напряжения из сниженного напряжения аккумулятора после приведения в действие электромотора и сниженного напряжения аккумулятора после приведения в действие актуатора.
дополнительно имеет режим зацепления, при котором актуатор приводится в действие таким образом, что он вводит вторую шестерню в зацепление с первой шестерней до приведения в действие электромотора, и
когда выполняется режим зацепления, ограничивает автоматическую остановку двигателя на основе сниженного напряжения после приведения в действие электромотора.
приводят в действие электромотор до приведения в действие актуатора; и
ограничивают автоматическую остановку двигателя на основе меньшего напряжения из сниженного напряжения аккумулятора после приведения в действие электромотора и сниженного напряжения аккумулятора после приведения в действие актуатора.
Комментарии