Устройство управления транспортным средством, транспортное средство и способ управления транспортным средством - RU2573687C2
Код документа: RU2573687C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству управления транспортным средством, которое устанавливается на транспортное средство, которое имеет двигатель и аккумулятор, а также к транспортному средству и способу управления транспортным средством.
УРОВЕНЬ ТЕХНИКИ
Двигатель и аккумулятор устанавливаются в автомобиль, и аккумулятор заряжается с помощью мощности от двигателя. Традиционно, в качестве управления зарядом, которое выполняется, чтобы заряжать аккумулятор, известна технология, чтобы уменьшать заряд аккумулятора для того, чтобы снижать расход топлива во время нормального движения и заряжать аккумулятор посредством рекуперативного генерирования электроэнергии во время торможения.
В качестве управления, которое снижает расход топлива, известно управление остановкой двигателя на холостом ходу (также называемое сокращение работы на холостом ходу или система старт-стоп). В указанном далее Патентном Документе 1 раскрывается автомобиль, который снабжается как функцией управления зарядом, так и функцией управления остановкой двигателя на холостом ходу, чтобы удовлетворять требованию улучшения топливной экономичности.
Однако, в вышеописанной технологии, когда величина электроэнергии, которая накапливается в аккумуляторе, расходуется вспомогательными механизмами, в то время как двигатель остается остановленным посредством управления остановкой двигателя на холостом ходу, двигатель может быть повторно запущен вследствие нехватки SOC (состояния заряда). "SOC" является показателем, который представляет, сколько электроэнергии остается в аккумуляторе. В частности, в вышеописанной технологии, вероятно должен происходить повторный запуск двигателя вследствие нехватки SOC, поскольку избыток SOC уменьшается посредством функции управления зарядом. Таким образом, топливная экономичность не может быть достаточно улучшена, и существует пространство для улучшения.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Патентный Документ 1: Публикация заявки на патент Японии № 2005-67293 (JP 2005-67293 A); и
Патентный Документ 2: Публикация заявки на патент Японии № 2011-163281 (JP 2011-163281 A)
ЗАДАЧИ, КОТОРЫЕ ДОЛЖНЫ БЫТЬ РЕШЕНЫ ИЗОБРЕТЕНИЕМ
Настоящее изобретение было создано, чтобы решать, по меньшей мере, часть вышеописанной традиционной проблемы, и задачей настоящего изобретения является дополнительное улучшение топливной экономичности транспортных средств.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧ
Чтобы решить, по меньшей мере, часть вышеописанной задачи, настоящее изобретение может быть реализовано в форме следующих аспектов или примеров применения.
ПЕРВЫЙ ПРИМЕР ПРИМЕНЕНИЯ
Устройство управления транспортным средством, которое устанавливается на транспортное средство, имеющее двигатель и аккумулятор, который может заряжаться количеством электроэнергии, генерируемой генератором электроэнергии, который приводится в действие мощностью от двигателя, включает в себя:
часть управления остановкой двигателя на холостом ходу, которая выполняет управление остановкой двигателя на холостом ходу;
часть определения SOC, которая определяет состояние заряда (SOC) аккумулятора;
часть задания емкости для остановки двигателя на холостом ходу, которая задает емкость для остановки двигателя на холостом ходу, которая, как прогнозируется, должна быть использована в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя посредством управления остановкой двигателя на холостом ходу в используемом SOC-диапазоне аккумулятора, пока транспортное средство движется; и
часть управления оставшейся емкостью, которая управляет количеством электроэнергии, которое генерируется генератором электроэнергии, чтобы не допускать падения оставшейся емкости в используемом SOC-диапазоне, которая соответствует SOC, которое определяется частью определения SOC, ниже емкости для остановки двигателя на холостом ходу, в то время как транспортное средство движется.
Согласно этой конфигурации, количество электроэнергии, которое генерируется генератором электроэнергии, в то время как транспортное средство движется, управляется так, что оставшаяся емкость в используемом SOC-диапазоне аккумулятора может управляться, чтобы не падать ниже емкости для остановки двигателя на холостом ходу, которая, как предполагается, должна использоваться в периоде остановки-запуска двигателя. Таким образом, повторный запуск двигателя вследствие нехватки SOC в середине периода остановки-запуска двигателя может быть предотвращен. Поскольку увеличение SOC посредством увеличения мощности двигателя, в то время как двигатель работает, имеет более высокий эффект топливной экономичности на единицу SOC (например, 1% SOC) по сравнению со случаем, когда двигатель повторно запускается вследствие нехватки SOC в середине периода остановки-запуска двигателя, топливная экономичность транспортного средства может быть улучшена.
ВТОРОЙ ПРИМЕР ПРИМЕНЕНИЯ
Устройство управления транспортным средством согласно примеру 1 применения может дополнительно включать в себя часть управления зарядом, которая уменьшает генерирование электроэнергии генератором электроэнергии, в то время как транспортное средство движется, и предоставляет возможность заряда аккумулятора посредством рекуперативного генерирования электроэнергии во время торможения транспортного средства, в котором часть задания емкости для остановки двигателя на холостом ходу задает параметр, который определяет коэффициент распределения, при котором используемый SOC-диапазон аккумулятора распределяется между емкостью для управления зарядом, которая потребуется в результате уменьшения генерирования электроэнергии генератором электроэнергии частью управления зарядом, и емкостью для остановки двигателя на холостом ходу в качестве емкости для остановки двигателя на холостом ходу.
Согласно этой конфигурации, используемый SOC-диапазон аккумулятора распределяется между емкостью для управления зарядом и емкостью для остановки двигателя на холостом ходу. Параметр, который определяет коэффициент распределения между емкостью для управления зарядом и емкостью для остановки двигателя на холостом ходу, задается в качестве емкости для остановки двигателя на холостом ходу. Таким образом, емкость для остановки двигателя на холостом ходу может быть задана соответствующим образом в используемом SOC-диапазоне аккумулятора.
ТРЕТИЙ ПРИМЕР ПРИМЕНЕНИЯ
В устройстве управления транспортным средством согласно примеру 1 или 2 применения часть задания емкости для остановки двигателя на холостом ходу может включать в себя часть прогнозирования окружения движения, которая прогнозирует окружение движения транспортного средства, в котором транспортное средство останавливается, и часть определения емкости, которая определяет емкость для остановки двигателя на холостом ходу на основе окружения движения.
Согласно этой конфигурации, емкость для остановки двигателя на холостом ходу, которая, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя, может быть оценена с высокой степенью точности на основе окружения движения. Это повышает определенность улучшения топливной экономичности.
ЧЕТВЕРТЫЙ ПРИМЕР ПРИМЕНЕНИЯ
В устройстве управления транспортным средством согласно примеру 3 применения транспортное средство может дополнительно включать в себя вспомогательные механизмы, которые работают с помощью SOC аккумулятора, причем часть задания емкости для остановки двигателя на холостом ходу дополнительно включает в себя часть вычисления рассматриваемого состояния транспортного средства, которая вычисляет рассматриваемое состояние транспортного средства, которое относится к рабочим условиям вспомогательных механизмов, и часть определения емкости определяет емкость для остановки двигателя на холостом ходу на основе рассматриваемого состояния транспортного средства в дополнение к окружению движения.
Когда количество электроэнергии, которое потребляется вспомогательными механизмами, большое, SOC расходуется с высокой скоростью. Согласно этой конфигурации, поскольку состояние исследуемого транспортного средства, которое относится к условиям эксплуатации вспомогательных механизмов, также принимается во внимание, когда вычисляется емкость для остановки двигателя на холостом ходу, емкость для остановки двигателя на холостом ходу может быть оценена с более высокой степенью точности. Это дополнительно повышает определенность улучшения топливной экономичности.
ПЯТЫЙ ПРИМЕР ПРИМЕНЕНИЯ
В устройство управления транспортным средством согласно примеру 1 или 2 применения транспортное средство может дополнительно включать в себя вспомогательные механизмы, которые работают с помощью SOC аккумулятора, причем часть задания емкости для остановки двигателя на холостом ходу дополнительно включает в себя часть вычисления рассматриваемого состояния транспортного средства, которая вычисляет рассматриваемое состояние транспортного средства, которое относится к рабочим условиям вспомогательных механизмов, и часть определения емкости, которая определяет емкость для остановки двигателя на холостом ходу на основе рассматриваемого состояния транспортного средства.
Согласно этой конфигурации, емкость для остановки двигателя на холостом ходу, которая, как предполагается, должна использоваться в периоде остановки-запуска двигателя, может быть оценена с высокой степенью точности на основе рассматриваемого состояния транспортного средства. Это повышает определенность улучшения топливной экономичности.
ШЕСТОЙ ПРИМЕР ПРИМЕНЕНИЯ
Транспортное средство может включать в себя:
двигатель;
аккумулятор, который может заряжаться количеством электроэнергии, которое генерируется генератором электроэнергии, который приводится в действие мощностью от двигателя;
часть управления остановкой двигателя на холостом ходу, которая выполняет управление остановкой двигателя на холостом ходу;
часть определения SOC, которая определяет состояние заряда (SOC) аккумулятора;
часть задания емкости для остановки двигателя на холостом ходу, которая задает емкость для остановки двигателя на холостом ходу, которая, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя посредством управления остановкой двигателя на холостом ходу в используемом SOC-диапазоне аккумулятора, в то время как транспортное средство движется; и
часть управления оставшейся емкостью, которая управляет количеством электроэнергии, которое генерируется генератором электроэнергии, чтобы не допускать падения оставшейся емкости в используемом SOC-диапазоне, которая соответствует SOC, которое определено посредством части определения SOC, ниже емкости для остановки двигателя на холостом ходу, в то время как транспортное средство движется.
СЕДЬМОЙ ПРИМЕР ПРИМЕНЕНИЯ
Способ управления транспортным средством для управления транспортным средством, имеющим двигатель и аккумулятор, который может заряжаться количеством электроэнергии, генерируемой генератором электроэнергии, который приводится в действие мощностью от двигателя, может включать в себя:
(a) этап выполнения управления остановкой двигателя на холостом ходу;
(b) этап определения состояния заряда (SOC) аккумулятора;
(c) этап задания емкости для остановки двигателя на холостом ходу, которая, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя посредством управления остановкой двигателя на холостом ходу в используемом SOC-диапазоне аккумулятора, в то время как транспортное средство движется; и
(d) этап управления количеством электроэнергии, которое генерируется генератором электроэнергии, чтобы не допускать падения оставшейся емкости в используемом SOC-диапазоне, которая соответствует SOC, которое определяется посредством части определения SOC, ниже емкости для остановки двигателя на холостом ходу, в то время как транспортное средство движется.
Согласно транспортному средству из примера 6 применения и способу управления транспортным средством из примера 7 применения, как и в случае устройства управления транспортным средством из примера 1 применения, повторный запуск двигателя вследствие нехватки SOC в середине периода остановки-запуска двигателя может быть предотвращен. Таким образом, топливная экономичность транспортного средства может быть улучшена.
Следует отметить, что настоящее изобретение может быть реализовано в различных аспектах. Например, настоящее изобретение может быть реализовано в форме системы управления, которая включает в себя устройство управления транспортным средством из первого примера применения, компьютерной программы, которая инструктирует компьютеру выполнять функции, которые соответствуют соответствующим этапам способа управления транспортным средством из седьмого примера применения, или носителя записи, на котором хранится компьютерная программа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - пояснительный вид, который иллюстрирует конфигурацию автомобиля 200 в качестве одного варианта осуществления настоящего изобретения;
Фиг. 2 - пояснительный вид, который иллюстрирует конфигурацию ЭБУ 50 с точки зрения его функций;
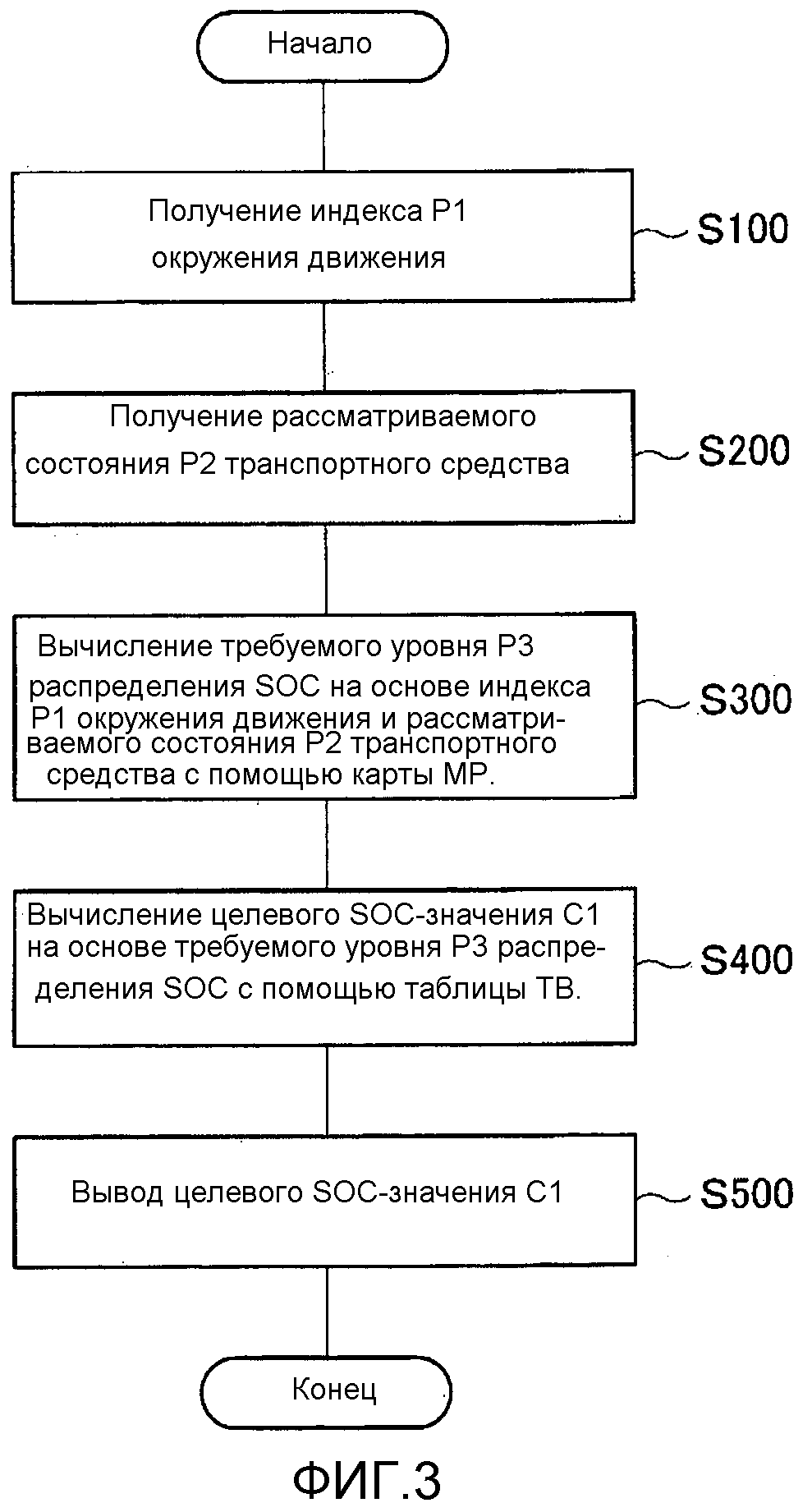
Фиг. 3 - блок-схема последовательности операций, которая иллюстрирует алгоритм оценки целевого SOC;
Фиг. 4 - пояснительный вид, который иллюстрирует карту MP вычисления требуемого уровня распределения SOC;
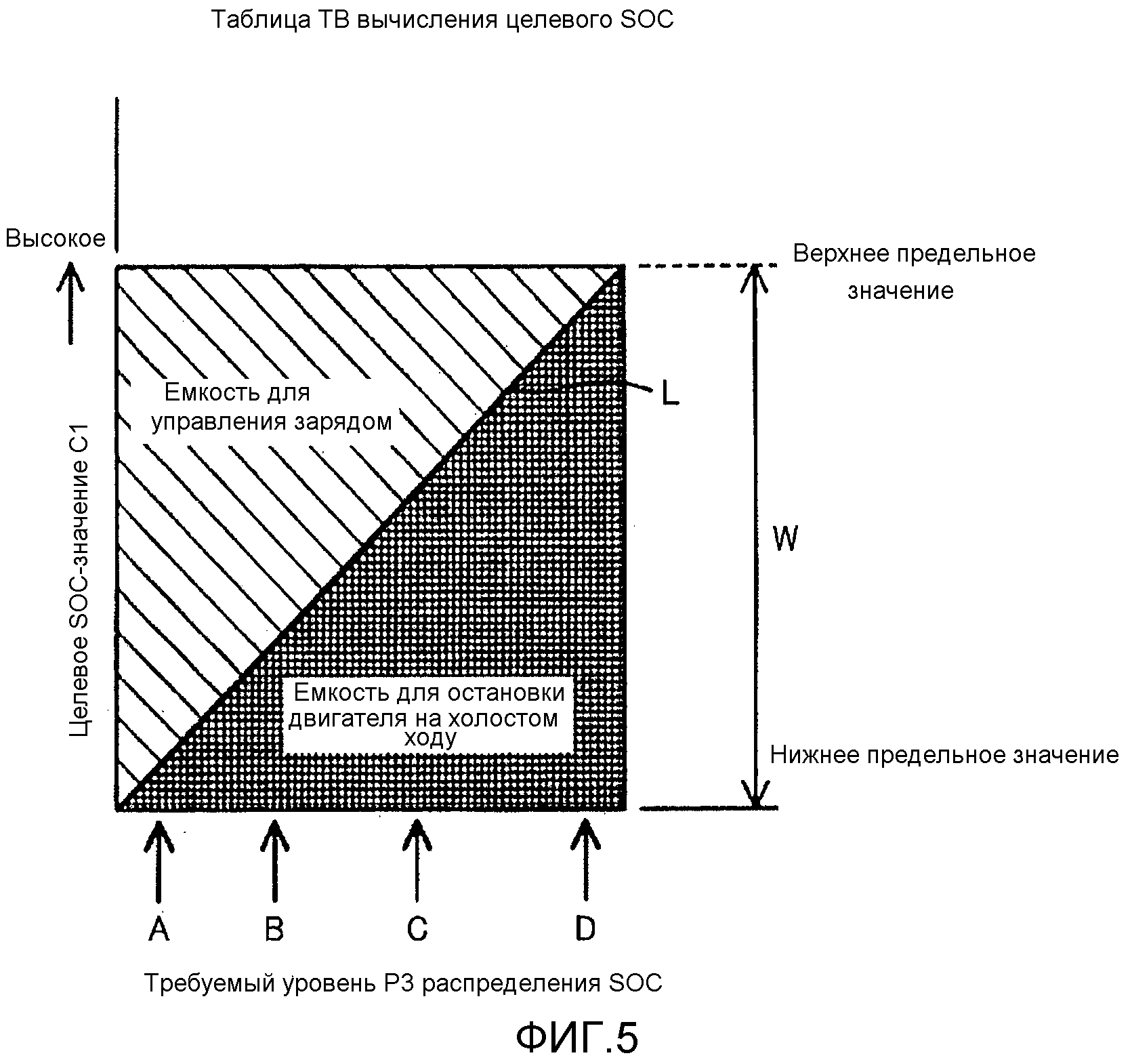
Фиг. 5 - пояснительный вид, который иллюстрирует таблицу TB вычисления целевого SOC; и
Фиг. 6 - пояснительный вид, который иллюстрирует временную диаграмму, относительно скорости транспортного средства и SOC во время движения автомобиля.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения описываются в следующем порядке на основе примеров.
A. Общая конфигурация
B. Конфигурация электронного блока управления (ЭБУ)
C. Конфигурация части оценки целевого SOC
D. Функции и результаты
E. Модификации
A. ОБЩАЯ КОНФИГУРАЦИЯ
Фиг. 1 представляет собой пояснительный вид, который иллюстрирует конфигурацию автомобиля 200 в качестве одного варианта осуществления настоящего изобретения. Автомобиль 200 является транспортным средством, которое снабжено функцией остановки двигателя на холостом ходу. Автомобиль 200 включает в себя двигатель 10, автоматическую трансмиссию 15, дифференциальную передачу 20, ведущие колеса 25, стартер 30, генератор 35 переменного тока, аккумулятор 40 и электронный блок управления (ЭБУ) 50.
Двигатель 10 является двигателем внутреннего сгорания, который сжигает топливо, такое как бензин или дизельное топливо, чтобы вырабатывать мощность. Мощность двигателя 10 передается автоматической трансмиссии 15, а также передается генератору 35 переменного тока через приводной механизм 34. Выходная мощность от двигателя 10 изменяется в пропорции к величине нажатия педали акселератора (не показана), которая задействуется водителем, посредством компьютера для управления двигателем (не показан).
Автоматическая трансмиссия 15 автоматически выполняет изменения передаточного числа трансмиссии (что называется переключением передач). Мощность (скорость вращения или крутящий момент) от двигателя 10 меняется по скорости посредством автоматической трансмиссии 15 и передается как желаемая скорость вращения или крутящий момент правому и левому ведущим колесам 25 через дифференциальную передачу 20. Таким образом, мощность двигателя 10 меняется в пропорции к величине нажатия педали акселератора и передается ведущим колесам 25 через автоматическую трансмиссию 15, чтобы ускорять или замедлять транспортное средство (автомобиль 200).
В этом варианте осуществления приводной механизм 34, который передает мощность от двигателя 10 к генератору 35 переменного тока, применяет конфигурацию ременного привода. Генератор 35 переменного тока генерирует электрическую мощность с помощью части мощности от двигателя 10. Сгенерированная электроэнергия используется, чтобы заряжать аккумулятор 40 через инвертор (не показан). Генерирование электроэнергии, которая выполняется генератором 35 переменного тока с помощью мощности от двигателя 10, в данном документе называется "топливным генерированием электроэнергии". Генератор 35 переменного тока соответствует "генератору электроэнергии", который описывается в разделе "Средство для решения задачи".
Аккумулятор 40 является свинцовым аккумулятором в качестве источника мощности постоянного тока (DC) с напряжением нагрузки 14 В и питает периферийные устройства, которые предусмотрены снаружи корпуса двигателя, электроэнергией. Периферийное устройство, которое предусматривается снаружи корпуса двигателя и работает на электроэнергии от аккумулятора 40 в данном документе называется "вспомогательным механизмом". Группа вспомогательных механизмов называется "вспомогательными механизмами". Автомобиль 200 включает в себя передние фары 72, кондиционер воздуха (A/C) 74 и т.д. в качестве вспомогательных механизмов 70.
Стартер 30 является стартерным мотором, который запускает двигатель 10 с помощью электроэнергии, которая подается от аккумулятора 40. Обычно, когда водитель задействует переключатель зажигания (не показан), чтобы начинать движение автомобиля из припаркованного состояния, стартер 30 активируется, чтобы запускать двигатель 10. Стартер 30 также используется, чтобы повторно запускать двигатель 10 из состояния остановки двигателя на холостом ходу, как описано ниже. Выражение "состояние остановки двигателя на холостом ходу", когда используется в данном документе, ссылается на остановленное состояние, которое устанавливается посредством управления остановкой двигателя на холостом ходу.
ЭБУ 50 включает в себя ЦП, который выполняет компьютерные программы, ПЗУ, которое хранит компьютерные программы и т.д., ОЗУ, которое временно хранит данные, порты ввода-вывода, которые соединяются с различными датчиками и актуаторами и т.д. Датчики, которые соединяются с ЭБУ 50, включают в себя датчик 82 скорости колеса, который определяет скорость вращения ведущих колес 25, датчик 84 педали тормоза, который обнаруживает, нажимается или нет педаль тормоза (не показана), датчик 86 величины срабатывания акселератора, который определяет величину нажатия педали акселератора (не показана) в качестве величины срабатывания акселератора, датчик 88 тока аккумулятора, который определяет ток заряда/разряда аккумулятора 40, и датчик 89 тока генератора переменного тока, который определяет выходной ток от генератора 35 переменного тока. Стартер 30, генератор 35 переменного тока и т.д. соответствуют актуаторам. ЭБУ 50 получает электрическую мощность, подаваемую от аккумулятора 40.
ЭБУ 50 управляет стартером 30 и генератором 35 переменного тока на основе сигналов от различных датчиков, которые описаны выше, и компьютера для управления двигателем (не показан), чтобы управлять остановкой и повторным запуском двигателя (управление остановкой двигателя на холостом ходу) и управлять SOC аккумулятора 40. ЭБУ 50 является устройством управления транспортным средством, которое относится непосредственно к настоящему изобретению.
B. КОНФИГУРАЦИЯ ЭБУ
Фиг. 2 представляет собой пояснительный вид, который иллюстрирует конфигурацию ЭБУ 50 с точки зрения его функций. Как иллюстрировано, ЭБУ 50 имеет часть 90 управления остановкой двигателя на холостом ходу и часть 100 управления SOC. В действительности, часть 90 управления остановкой двигателя на холостом ходу и часть 100 управления SOC являются функциями, которые ЦП в ЭБУ 50 реализует, выполняя компьютерные программы, которые хранятся в ПЗУ.
Часть 90 управления остановкой двигателя на холостом ходу получает скорость Vh колеса, которая определяется датчиком 82 скорости колеса, и величину Tp срабатывания акселератора, которая определяется датчиком 86 величины срабатывания акселератора, и выводит команду SS, чтобы останавливать/запускать двигатель 10, стартеру 30. В частности, часть 90 управления остановкой двигателя на холостом ходу определяет, что условие остановки двигателя удовлетворяется, и выводит команду Ss, чтобы останавливать двигатель, стартеру 30, когда скорость Vh колеса снижается ниже предписанной скорости (10 км/ч, например), и затем определяет, что условие повторного запуска двигателя удовлетворяется, и выводит команду Ss, чтобы повторно запускать двигатель, стартеру 30, когда нажатие на педаль акселератора обнаруживается на основе величины Tp срабатывания акселератора.
Другими словами, часть 90 управления остановкой двигателя на холостом ходу останавливает двигатель 10, когда удовлетворяется условие остановки двигателя, и повторно запускает двигатель 10, когда условие повторного запуска двигателя удовлетворяется после остановки двигателя. Условие остановки двигателя и условие повторного запуска двигателя не ограничиваются описанными выше. Например, уменьшение скорости Vh колеса до 0 км/ч может использоваться в качестве условия остановки двигателя, а отделение ступни от педали тормоза может использоваться в качестве условия повторного запуска двигателя.
Часть 100 управления SOC включает в себя часть 110 оценки целевого SOC, часть 120 вычисления SOC аккумулятора и часть 130 управления с обратной связью. Часть 110 оценки целевого SOC оценивает SOC, которое, как прогнозируется, должно использоваться в течение периода между остановкой и повторным запуском двигателя посредством управления остановкой двигателя на холостом ходу (который далее в данном документе называется "периодом остановки-запуска двигателя") в качестве целевого SOC (которое далее в данном документе также называется "целевым SOC-значением") C1, когда транспортное средство движется (например, скорость Vh колеса >0 км/ч). Подробная конфигурация части 110 оценки целевого SOC описывается в разделе C. Часть 110 оценки целевого SOC соответствует "части задания емкости для остановки двигателя на холостом ходу", которая описывается в разделе "Средство для решения задачи". "SOC" определяется как значение, полученное посредством деления количества электроэнергии, которое остается в аккумуляторе, на количество электроэнергии, которое может быть сохранено в аккумуляторе, когда аккумулятор полностью заряжен.
Часть 120 вычисления SOC аккумулятора вычисляет текущее SOC аккумулятора 40 (которое далее в данном документе называется "текущим SOC-значением") C2 на основе тока Ab заряда/разряда аккумулятора 40 (который называется "током аккумулятора"), который был определен датчиком 88 тока аккумулятора. В частности, часть 120 вычисления SOC аккумулятора вычисляет текущее SOC-значение C2, накапливая ток Ab заряда/разряда посредством сложения токов заряда аккумулятора 40 как положительных значений и токов разряда аккумулятора 40 как отрицательных значений. Конфигурация датчика 88 тока аккумулятора и части 120 вычисления SOC аккумулятора соответствует "части определения SOC", которая описывается в разделе "Средство для решения задачи". Часть определения SOC не ограничивается частью, которая выполняет вычисление на основе тока аккумулятора, который был определен датчиком 88 тока аккумулятора, и может быть сконфигурирована, чтобы выполнять вычисление на основе плотномера электролитического раствора аккумулятора, датчика напряжения элемента, датчика напряжения на клеммах аккумулятора или т.п. Кроме того, часть определения SOC необязательно должна конфигурироваться, чтобы определять количество электроэнергии, которое остается в аккумуляторе, а может определять состояние заряда на основе другого параметра, такого как заряжаемая величина.
Часть 130 управления с обратной связью получает значение разности посредством вычитания текущего SOC-значения C2 из целевого SOC-значения C1, когда транспортное средство движется, и получает значение Sv команды напряжения, которое выдает инструкцию, чтобы значение разности достигало значения 0 посредством управления с обратной связью. Командное значение Sv напряжения указывает количество электроэнергии, которое генератор 35 переменного тока должен сгенерировать, и отправляется генератору 35 переменного тока. В результате, текущее SOC-значение C2 управляется, чтобы быть равным целевому SOC-значению C1 посредством топливного генерирования электроэнергии. Конфигурация части 130 управления с обратной связью соответствует "части управления оставшейся емкостью", которая описывается в разделе "Средство для решения задачи".
Хотя не показано, часть 100 управления SOC также снабжается функцией, которая называется "управление аккумулятором", и функцией, которая называется "управление зарядом", в дополнение к вышеописанной функции. Описывается управление аккумулятором. Аккумулятор, в частности, свинцовый аккумулятор в этом варианте осуществления, имеет используемый SOC-диапазон (рабочий SOC-диапазон), который определен заранее согласно требованию для более длительного срока эксплуатации. Таким образом, "управление аккумулятором" выполняется, чтобы повышать SOC до вышеуказанного SOC-диапазона, увеличивая мощность двигателя 10, когда SOC аккумулятора 40 ниже, чем нижнее предельное значение (60%, например) SOC-диапазона, и уменьшать SOC до вышеуказанного SOC-диапазона, расходуя SOC, когда SOC выше верхнего предельного значения (90%, например) SOC-диапазона. Когда SOC падает ниже нижнего предельного значения, когда двигатель остается остановленным посредством управления остановкой двигателя на холостом ходу, двигатель запускается, так что SOC может быть увеличено до вышеописанного диапазона величин SOC посредством топливного генерирования электроэнергии.
"Управление зарядом" представляет собой операцию управления, которая выполняется, чтобы уменьшать заряд аккумулятора посредством топливного генерирования электроэнергии для того, чтобы уменьшать расход топлива во время нормального движения, и заряжать аккумулятор посредством рекуперативного генерирования электроэнергии во время торможения. В то время как управление зарядом хорошо известно, и его подробное описание опускается, как правило, выполняется операция, которая описана ниже. При управлении зарядом, управление с обратной связью посредством части 130 управления с обратной связью во время нормального движения выполняется, когда целевое SOC-значение C1 превышает текущее SOC-значение C2, и предписанное напряжение отключения генерирования электроэнергии отправляется генератору 35 переменного тока в качестве командного значения Sv напряжения, когда целевое SOC-значение C1 равно или ниже текущего SOC-значения C2 во время нормального движения. Посредством этой конфигурации заряд во время нормального движения может быть уменьшен, чтобы уменьшать расход топлива. Выражение "нормальное движение" ссылается на состояние автомобиля 200, которое не соответствует ни "остановке", когда скорость транспортного средства равна 0 км/ч, ни "торможению", когда выполняется рекуперативное генерирование электроэнергии.
C. КОНФИГУРАЦИЯ ЧАСТИ ОЦЕНКИ ЦЕЛЕВОГО SOC
Часть 110 оценки целевого SOC включает в себя часть 112 прогнозирования окружения движения, часть 114 прогнозирования рассматриваемого состояния транспортного средства, часть 116 вычисления требуемого уровня распределения SOC и часть 118 вычисления целевого SOC.
Часть 112 прогнозирования окружения движения прогнозирует окружение движения. Выражение "окружение движения", когда используется в данном документе, ссылается на параметр, который указывает, как часто состояние остановки двигателя на холостом ходу будет в дальнейшем (с этого момента) устанавливаться, другими словами, параметр, который относится к пропорции периода остановки-запуска двигателя в предписанном периоде в будущем. Другими словами, "окружение движения" является окружением движения транспортного средства, в котором транспортное средство останавливается посредством управления остановкой двигателя на холостом ходу. В частности, часть 112 прогнозирования окружения движения вычисляет индекс окружения движения, который указывает окружение движения в форме индекса на основе скорости Vh колеса, которое было определено датчиком 82 скорости колеса. В частности, часть 112 прогнозирования окружения движения вычисляет пропорцию R времени остановки транспортного средства в предписанном периоде (10 минут, например) непосредственно перед настоящим моментом на основе скорости Vh колеса и вычисляет индекс P1 окружения движения из пропорции. Другими словами, часть 112 прогнозирования окружения движения получает общее время остановки транспортного средства, в течение которого скорость Vh колеса была равна 0 в предписанном периоде, вычисляет пропорцию R, разделяя сумму на полную продолжительность предписанного периода, и вычисляет индекс P1 окружения движения из пропорции R.
Большая пропорция R означает, что транспортное средство часто останавливалось, и период остановки был длительным, и может быть спрогнозировано, что транспортное средство будет в дальнейшем часто останавливаться, и период остановки будет длительным. Таким образом, в этом варианте осуществления, индекс P1 окружения движения определяется согласно следующим критериям.
- Когда пропорция R времени остановки в 10 минутном периоде <38%, индекс P1 окружения движения устанавливается в значение, равное 1.
- Когда 38%≤ пропорция R времени остановки в 10 минутном периоде <42%, индекс P1 окружения движения устанавливается в значение, равное 2.
- Когда 42%≤ пропорция R времени остановки в 10 минутном периоде <46%, индекс P1 окружения движения устанавливается в значение, равное 3.
- Когда пропорция R времени остановки в 10 минутном периоде ≥46%, индекс P1 окружения движения устанавливается в значение, равное 4.
Пороговые значения необязательно ограничиваются 38%, 42% и 46%, как указано выше, и могут быть различными числовыми значениями. Индекс P1 окружения движения, который должен быть получен, необязательно выбирается из четырех числовых значений 1-4 и может выбираться из другого числа, такого как три, пять или шесть числовых значений. Поскольку может быть определено, что транспортное средство находится в пригородной зоне, когда индекс P1 окружения движения является низким, и что транспортное средство находится в городской зоне, когда индекс P1 окружения движения является высоким, степень урбанизации считается более высокой, когда индекс P1 окружения движения имеет более высокое значение.
В то время как индекс P1 окружения движения получается на основе скорости Vh колеса, которая была определена датчиком 82 скорости колеса в этом варианте осуществления, настоящее изобретение не ограничивается этим. Например, индекс P1 окружения движения может быть сконфигурирован, чтобы получаться на основе среднего значения скоростей транспортного средства, которые были определены датчиком скорости транспортного средства, степени изменения скорости Vh колеса, которая определяется датчиком 82 скорости колеса (т.е., ускорения), положения передачи ручной трансмиссии в случае транспортного средства с MT (ручной трансмиссией), передаточного числа автоматической трансмиссии или т.п. в случае транспортного средства с AT (автоматической трансмиссией). Другими словами, поскольку степень урбанизации выше, когда средняя скорость транспортного средства является более низкой, индекс P1 окружения движения должен быть установлен в более высокое значение, когда средняя скорость транспортного средства становится более низкой. Поскольку степень урбанизации выше, когда степень изменения скорости Vh колеса является более высокой, индекс P1 окружения движения должен быть установлен в более высокое значение, когда степень изменения скорости Vh колеса становится более высокой. Поскольку степень урбанизации выше, когда положение передачи ручной трансмиссии изменяется более часто, индекс P1 окружения движения должен быть установлен в более высокое значение, когда положение передачи ручной трансмиссии изменяется более часто. Поскольку степень урбанизации выше, когда передаточное число автоматической трансмиссии или т.п. изменяется более часто, индекс P1 окружения движения должен быть установлен в более высокое значение, когда передаточное число автоматической трансмиссии или т.п. изменяется более часто.
Индекс P1 окружения движения необязательно конфигурируется, чтобы получаться на основе одного параметра, выбранного из скорости Vh колеса и параметров, которые могут быть использованы вместо скорости Vh колеса, и индекс P1 окружения движения может быть сконфигурирован, чтобы получаться на основе двух или более параметров. Когда применяются два или более параметров, предпочтительно, чтобы индекс P1 окружения движения был сконфигурирован, чтобы получаться с помощью параметров, умноженных на соответствующие весовые коэффициенты. Когда применяется скорость Vh колеса или параметр, который может быть использован вместо скорости Vh колеса, окружение движения может быть спрогнозировано только в автономной системе, т.е., автомобиле 200. В противоположность этому, индекс P1 окружения движения может быть сконфигурирован, чтобы получаться на основе информации, которая получается снаружи автономной системы. Одним примером информации, которая получается снаружи автономной системы, является дорожная картографическая информация в системе навигации. Индекс P1 окружения движения может быть получен посредством определения того, продолжает ли транспортное средство в дальнейшем двигаться в городской или пригородной зоне, на основе дорожной картографической информации в системе навигации.
Часть 114 прогнозирования рассматриваемого состояния транспортного средства прогнозирует состояние автомобиля 200 (рассматриваемое состояние транспортного средства). Выражение "рассматриваемое состояние транспортного средства", когда используется в данном документе, ссылается на параметр, который указывает, сколько SOC автомобиль 200 израсходует в дальнейшем. В частности, часть 114 прогнозирования рассматриваемого состояния транспортного средства вычисляет количество электроэнергии, которое будет израсходовано вспомогательными механизмами 70, на основе тока Ab аккумулятора, который определяется посредством датчика 88 тока аккумулятора, и тока Aa генератора переменного тока, который определяется датчиком 89 тока генератора переменного тока, и выводит количество электроэнергии в качестве рассматриваемого состояния P2 транспортного средства. В этом варианте осуществления, когда количество электроэнергии, которое будет израсходовано вспомогательными механизмами 70, является большим, состояние 114 прогнозирования рассматриваемого состояния транспортного средства получает количество электроэнергии, которое будет израсходовано вспомогательными механизмами 70, в качестве рассматриваемого состояния P2 транспортного средства, поскольку SOC будет расходоваться с высокой скоростью.
Тогда как рассматриваемое состояние P2 транспортного средства получается на основе количества электроэнергии, которое будет израсходовано вспомогательными механизмами 70, настоящее изобретение не ограничивается этим. Например, рассматриваемое состояние P2 транспортного средства может быть сконфигурировано, чтобы получаться на основе информации о кондиционировании воздуха, которая имеет соотношение соответствия с электроэнергией, которая потребляется кондиционером воздуха (A/C) (например, разница между целевой температурой и температурой в салоне), или информации, которая указывает условие прогрева двигателя, такое как разница между температурой охлаждающей жидкости двигателя и окружающей температурой. Рассматриваемое состояние P2 транспортного средства необязательно конфигурируется, чтобы получаться на основе одного параметра, который выбирается из количества электроэнергии, которое будет израсходовано вспомогательными механизмами 70, информации о кондиционировании воздуха, информации об условии прогрева и т.д., и рассматриваемое состояние P2 транспортного средства может быть сконфигурировано, чтобы получаться на основе двух или более параметров. Когда применяются два или более параметров, предпочтительно, чтобы рассматриваемое состояние P2 транспортного средства было сконфигурировано, чтобы получаться с помощью параметров, умноженных на соответствующие весовые коэффициенты.
Кроме того, в то время как текущие рабочие условия вспомогательных механизмов определяются на основе сигналов датчиков, которые в текущий момент определяются, и текущие рабочие условия рассматриваются как рассматриваемое состояние транспортного средства в будущем в каждом из примеров, которые описаны выше, рассматриваемое состояние транспортного средства в будущем может быть сконфигурировано, чтобы прогнозироваться посредством нахождения знака изменения рабочих условий из настоящих рабочих условий, которые получаются, как описано выше.
Часть 112 прогнозирования окружения движения и часть 114 прогнозирования рассматриваемого состояния транспортного средства, которые сконфигурированы, как описано выше, непрерывно выполняют свое прогнозирование после того, как автомобиль 200 начинает двигаться. В реальности, части 122-124 реализуются, когда ЦП в ЭБУ 50 выполняет компьютерные программы, которые хранятся в ПЗУ. Индекс P1 окружения движения, который вычисляется посредством части 112 прогнозирования окружения движения, и рассматриваемое состояние P2 транспортного средства, которое вычисляется посредством части 114 прогнозирования рассматриваемого состояния транспортного средства, отправляются в часть 116 вычисления требуемого уровня распределения SOC.
Часть 116 вычисления требуемого уровня распределения SOC вычисляет требуемый уровень P3 распределения SOC на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства, и часть 118 вычисления целевого SOC вычисляет целевое SOC-значение C1 на основе требуемого уровня P3 распределения SOC. В последующем, детали части 116 вычисления требуемого уровня распределения SOC и части 118 вычисления целевого SOC описываются подробно ниже.
Фиг. 3 представляет собой блок-схему последовательности операций, которая иллюстрирует алгоритм оценки целевого SOC. Алгоритм оценки целевого SOC выполняется повторяющимся образом с предписанными интервалами времени (каждые 60 с, например), пока транспортное средство движется. Другими словами, алгоритм оценки целевого SOC не выполняется, пока двигатель 10 остается остановленным посредством управления остановкой двигателя на холостом ходу. Как иллюстрировано, когда работа начинается, ЦП в EPU 50 получает индекс P1 окружения движения, который получается посредством части 112 прогнозирования окружения движения (фиг. 2) (этап S100), и получает рассматриваемое состояние P2 транспортного средства, которое получается посредством части 114 прогнозирования рассматриваемого состояния транспортного средства (фиг. 2) (этап S200).
После выполнения этапа S200 ЦП выполняет операцию, чтобы вычислять требуемый уровень распределения SOC на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства с помощью карты MP вычисления требуемого уровня распределения SOC (этап S300). Как описано выше, каждый аккумулятор имеет используемый SOC-диапазон, который определяется заранее на основе типа аккумулятора. В этом варианте осуществления предполагается распределение используемого SOC-диапазона между емкостью для остановки двигателя на холостом ходу и емкостью для управления зарядом, и "требуемый уровень распределения SOC" является параметром, который обозначает уровни вышеуказанного распределения.
Фиг. 4 представляет собой пояснительный вид, который иллюстрирует карту MP вычисления требуемого уровня распределения SOC. Как иллюстрировано, карта MP вычисления требуемого уровня распределения SOC включает в себя данные карты для требуемых уровней P3 распределения SOC, которые соответствуют индексу P1 окружения движения, который нанесен на горизонтальную ось, и рассматриваемому состоянию P2 транспортного средства, которое нанесено на вертикальную ось. Карта MP вычисления требуемого уровня распределения SOC подготавливается посредством получения соотношения между индексом P1 окружения движения, рассматриваемым состоянием P2 транспортного средства и требуемым уровнем P3 распределения SOC экспериментально или посредством моделирования заранее и сохраняется в ПЗУ. На этапе S300 карта MP вычисления требуемого уровня распределения SOC извлекается из ПЗУ, и требуемый уровень P3 распределения SOC, который соответствует индексу P1 окружения движения, который получен на этапе S100, и рассматриваемому состоянию P2 транспортного средства, которое получено на этапе S200, получается со ссылкой на карту MP. В иллюстрированном примере четыре значения A, B, C и D подготавливаются в качестве требуемых уровней P3 распределения SOC. Значения A, B, C и D находятся в возрастающем порядке. Требуемый уровень P3 распределения SOC имеет более высокое значение, когда индекс P1 окружения движения является более высоким и рассматриваемое состояние P2 транспортного средства является более высоким.
Обращаясь опять к фиг. 3, после выполнения этапа S300 ЦП выполняет операцию, чтобы вычислять целевое SOC-значение C1 на основе требуемого уровня P3 распределения SOC с помощью таблицы TB вычисления целевого SOC (этап S400).
Фиг. 5 представляет собой пояснительный вид, который иллюстрирует таблицу TB вычисления целевого SOC. Как иллюстрировано, таблица TB вычисления целевого SOC имеет горизонтальную ось, которая представляет требуемый уровень P3 распределения SOC, и вертикальную ось, которая представляет целевое SOC-значение C1, и включает в себя прямую линию L, которая указывает соотношение между требуемым уровнем P3 распределения SOC и целевым SOC-значением C1. Таблица TB вычисления целевого SOC подготавливается посредством получения соотношения между требуемым уровнем P3 распределения SOC и целевым SOC-значением C1 экспериментально или посредством моделирования заранее и сохраняется в ПЗУ. На этапе S400 таблица TB вычисления целевого SOC извлекается из ПЗУ, и целевое SOC-значение C1, которое соответствует требуемому уровню P3 распределения SOC, который был вычислен на этапе S300, получается со ссылкой на таблицу TB.
Как иллюстрировано, целевое SOC-значение C1, которое указывается прямой линией L, является значением, которое задается в используемом SOC-диапазоне W аккумулятора 40 и указывает коэффициент распределения, с которым используемый SOC-диапазон W распределяется между емкостью для управления зарядом и емкостью для остановки двигателя на холостом ходу. Другими словами, область для емкости для остановки двигателя на холостом ходу и область для емкости для управления зарядом задаются на нижней стороне и верхней стороне, соответственно, в используемом SOC-диапазоне W аккумулятора 40, и граница между областями является целевым SOC-значением C1. Также может считаться, что уровень, полученный посредством добавления емкости для остановки двигателя на холостом ходу к нижнему предельному значению используемого SOC-диапазона W, устанавливается в качестве целевого SOC-значения C1.
Емкость для управления зарядом является емкостью аккумулятора, которая потребуется в результате уменьшения топливного генерирования электроэнергии посредством управления зарядом, как описано выше. Емкость для остановки двигателя на холостом ходу является емкостью, которая, как прогнозируется, должна использоваться в течение периода остановки-запуска двигателя в будущем. В этом варианте осуществления емкость для остановки двигателя на холостом ходу устанавливается в максимальное ожидаемое значение. Чем выше требуемый уровень P3 распределения SOC, тем больше емкость для остановки двигателя на холостом ходу. Когда SOC управляется, чтобы быть в области выше прямой линии L, оставшаяся емкость в используемом SOC-диапазоне, которая соответствует SOC, превышает емкость для остановки двигателя на холостом ходу, и управление остановкой двигателя на холостом ходу может, поэтому, выполняться полностью. Однако, оставшаяся емкость является избыточной на количество, на которое она превышает емкость для остановки двигателя на холостом ходу. Таким образом, целевое SOC-значение C1, которое указывается прямой линией L, считается представляющим SOC, которое достаточно, чтобы полностью выполнять управление остановкой двигателя на холостом ходу в будущем и уменьшать количество генерируемой электроэнергии для сохранения SOC до минимума.
В то время как целевое SOC-значение C1 линейно увеличивается с увеличением требуемого уровня P3 распределения SOC, как указано прямой линией L, настоящее изобретение не ограничивается этим. Например, целевое SOC-значение C1 может быть сконфигурировано, чтобы определяться так, что целевое SOC-значение C1 линейно увеличивается с увеличением требуемого уровня P3 распределения SOC, когда требуемый уровень P3 распределения SOC равен или ниже предписанного значения, и сохраняет постоянное значение, когда требуемый уровень P3 распределения SOC выше предписанного значения. Эта конфигурация эффективна в случае аккумулятора, который имеет относительно небольшой используемый SOC-диапазон. Кроме того, изменение целевого SOC-значения C1 может быть сконфигурировано, чтобы представляться посредством кривой линии вместо прямой линии.
Обращаясь опять к фиг. 3, после выполнения этапа S400 ЦП выводит целевое SOC-значение C1, которое было вычислено на этапе S400, в часть 130 управления с обратной связью (этап S500), и затем завершает текущий алгоритм оценки целевого SOC. В части 130 управления с обратной связью (фиг. 2) текущее SOC-значение C2 управляется, чтобы быть равным вычисленному целевому SOC-значению C1. В то время как текущее SOC-значение C2 представляет оставшуюся емкость в используемом SOC-диапазоне аккумулятора 40, не допускается падения оставшейся емкости ниже емкости для остановки двигателя на холостом ходу, пока транспортное средство движется, в результате вышеописанного управления. Другими словами, когда текущее SOC-значение находится в области емкости для управления зарядом на фиг. 5, другими словами, когда оставшаяся емкость превышает емкость для остановки двигателя на холостом ходу, выполняется управление зарядом, чтобы уменьшать заряд аккумулятора 40 посредством топливного генерирования электроэнергии. Затем, непосредственно перед тем, как SOC падает ниже емкости для остановки двигателя на холостом ходу, SOC управляется, чтобы быть равным целевому SOC-значению C1, которое указывается прямой линией L, посредством топливного генерирования электроэнергии и не допускается падение ниже емкости для остановки двигателя на холостом ходу.
D. ФУНКЦИИ И РЕЗУЛЬТАТЫ
Фиг. 6 представляет собой пояснительный вид, который иллюстрирует временную диаграмму, относящуюся к скорости транспортного средства и SOC (текущему SOC-значению C2) аккумулятора 40 во время движения автомобиля 200. Временная диаграмма имеет вертикальные оси, которые представляют скорость транспортного средства и SOC, соответственно, и горизонтальную ось, которая представляет время. После того как автомобиль 200 начинает ехать, и автомобиль 200 начинает двигаться в момент времени t0, скорость транспортного средства постепенно увеличивается, и автомобиль 200 приводится в нормальное движение. После этого транспортное средство приводится в замедляющееся состояние в момент времени t1. В периоде t0-t1 от момента времени t0 до момента времени t1 SOC постепенно уменьшается, как указано сплошной линией. Сплошная линия представляет SOC в традиционном примере, тогда как SOC изменяется, как указано штрих-двухпунктирной линией в этом варианте осуществления. Это описывается подробно позже.
После времени t1 транспортное средство останавливается в момент времени t2. В периоде t1-t2 рекуперативное генерирование электроэнергии имеет место, поскольку транспортное средство тормозит, и SOC постепенно увеличивается, как указано сплошной линией. Период от момента времени t2 (строго, момент времени, когда удовлетворяется условие остановки двигателя) до момента времени t3, когда скорость транспортного средства начинает увеличиваться снова, является периодом SST остановки двигателя на холостом ходу, в течение которого двигатель 10 остается остановленным. В периоде SST остановки двигателя на холостом ходу SOC постепенно уменьшается вследствие потребления электроэнергии вспомогательными механизмами. В традиционном примере, когда SOC достигает нижнего предельного значения SL (момент времени tb), как указано сплошной линией, в то время как двигатель 10 остается остановленным, двигатель 10 повторно запускается посредством управления аккумулятором. После повторного запуска электроэнергия генерируется с помощью мощности от двигателя 10, как указано сплошной линией, и SOC увеличивается.
В этом варианте осуществления, когда SOC уменьшается до тех пор, пока оставшаяся емкость в используемом SOC-диапазоне аккумулятора 40 не упадет ниже емкости для остановки двигателя на холостом ходу во время нормального движения (момент времени ta), SOC увеличивается посредством топливного генерирования электроэнергии. Как указано штрих-двухпунктирной линией на чертеже, SOC увеличивается в периоде ta-t2. Поскольку это увеличение принимает во внимание максимальную емкость аккумулятора, которая, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя в будущем, даже если SOC уменьшается в периоде t2-t3 остановки-запуска двигателя, SOC не достигает нижнего предельного значения SL. Выражение "период остановки-запуска двигателя в будущем" не ограничивается одним периодом SST остановки двигателя на холостом ходу, как показано на чертеже. Когда множество периодов остановки-запуска двигателя включены в предписанный период, все из периодов остановки-запуска двигателя включаются в период остановки-запуска двигателя в будущем.
Таким образом, в этом варианте осуществления, ситуация, в которой двигатель 10 повторно запускается в периоде t2-t3 остановки-запуска двигателя, поскольку SOC достигает нижнего предельного значения, не имеет места в отличие от традиционного примера. Когда двигатель повторно запускается вследствие нехватки SOC в середине периода остановки-запуска двигателя, от трех до почти пяти раз больше топлива требуется по сравнению со случаем, когда мощность двигателя увеличивается, чтобы увеличивать SOC, в то время как двигатель работает. Другими словами, результат топливной экономичности на единицу SOC (1%, например), который может быть получен, когда двигатель работает, в три-пять раз лучше, чем в случае, когда двигатель повторно запускается в середине периода остановки-запуска двигателя вследствие нехватки SOC. Таким образом, автомобиль 200 этого варианта осуществления может улучшать топливную эффективность по сравнению с традиционным примером.
E. МОДИФИКАЦИИ
Понятно, что это изобретение не ограничивается вышеописанными примерами и вариантами осуществления и может быть осуществлено различными способами без отступления от своей сути. Например, следующие модификации также возможны.
МОДИФИКАЦИЯ 1
В то время как требуемый уровень P3 распределения SOC получается на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства в вышеописанных примерах, требуемый уровень P3 распределения SOC может быть взамен сконфигурирован, чтобы получаться на основе величины срабатывания дискового регулятора, который предоставляется на приборной панели (не показана) автомобиля 200 для управления водителем. Когда автомобиль 200 въезжает в городскую зону из пригородной зоны, например, водитель может увеличивать целевое SOC, другими словами, коэффициент распределения для остановки двигателя на холостом ходу, поворачивая дисковый регулятор в состояние "Высокий", чтобы изменять настройку так, что требуемый уровень P3 распределения SOC может увеличиваться. Согласно этой конфигурации, когда водитель может адекватно распознать зону, в которую автомобиль 200 въедет из текущей, чтобы устанавливать требуемый уровень распределения SOC, максимальное SOC, которое будет использоваться в периоде остановки-запуска двигателя, может быть задано с высокой степенью точности на основе окружения движения. Дисковый регулятор может быть дисковым регулятором, который может регулировать требуемый уровень распределения SOC на двух уровнях, "Высоком" и "Низком", или дисковым регулятором, который может регулировать на множестве уровней от трех и более. Дисковый регулятор может быть заменен другим средством ввода, таким как переключатель. Кроме того, вместо получения требуемого уровня P3 распределения SOC на основе лишь величины задействования дискового регулятора, требуемый уровень P3 распределения SOC, который получается на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства в вышеприведенном примере, может быть сконфигурирован, чтобы корректироваться на основе величины задействования дискового регулятора.
МОДИФИКАЦИЯ 2
В то время как требуемый уровень P3 распределения SOC конфигурируется, чтобы получаться на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства, и затем целевое SOC конфигурируется, чтобы вычисляться на основе требуемого уровня P3 распределения SOC в вышеописанных примерах, целевое SOC может вместо этого быть сконфигурировано, чтобы непосредственно вычисляться на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства. Другими словами, коэффициент распределения, с которым используемый SOC-диапазон аккумулятора распределяется между емкостью для управления зарядом и емкостью для остановки двигателя на холостом ходу, может быть сконфигурирован, чтобы непосредственно вычисляться на основе индекса P1 окружения движения и рассматриваемого состояния P2 транспортного средства. Аналогично, целевое SOC может быть сконфигурировано, чтобы непосредственно вычисляться на основе величины задействования дискового регулятора в вышеописанной модификации 1.
МОДИФИКАЦИЯ 3
В то время как требуемый уровень распределения SOC вычисляется на основе как индекса P1 окружения движения, так и рассматриваемого состояния P2 транспортного средства в вышеописанных примерах, требуемый уровень распределения SOC может вместо этого быть сконфигурирован, чтобы вычисляться на основе либо индекса P1 окружения движения, либо рассматриваемого состояния P2 транспортного средства.
МОДИФИКАЦИЯ 4
В то время как аккумулятор является свинцовым аккумулятором в вышеописанных примерах, настоящее изобретение не ограничивается этим. Например, аккумулятор может быть заменен аккумулятором другого типа, таким как литий-ионная аккумуляторная батарея, или устройство накопления электроэнергии типа "rocking chair". В то время как транспортное средство является автомобилем в вышеописанном примере, транспортное средство может вместо этого быть транспортным средством, отличным от автомобиля, таким как электропоезд.
МОДИФИКАЦИЯ 5
Некоторые из функций, которые реализуются посредством программного обеспечения в вышеописанном примере, могут быть реализованы посредством аппаратных средств (таких как интегральная схема), и некоторые из функций, которые реализуются посредством аппаратных средств в вышеописанном примере, могут быть реализованы посредством программного обеспечения.
МОДИФИКАЦИЯ 6
Элементы, отличные от элементов, которые описываются в независимых пунктах формулы изобретения, среди составляющих элементов в примерах и модификациях, которые описаны выше, являются дополнительными элементами и могут быть исключены по желанию. Например, управление зарядом, которое выполняется, чтобы уменьшать заряд аккумулятора, чтобы уменьшать расход топлива во время нормального движения и заряжать аккумулятор посредством рекуперативного генерирования электроэнергии во время торможения, может быть исключено.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 Двигатель
15 Автоматическая трансмиссия
20 Дифференциальная передача
25 Ведущее колесо
30 Стартер
34 Приводной механизм
35 Генератор переменного тока
40 Аккумулятор
50 ЭБУ
70 Вспомогательные механизмы
72 Передняя фара
74 Кондиционер воздуха
82 Датчик скорости колеса
84 Датчик педали тормоза
86 Датчик величины срабатывания акселератора
88 Датчик тока аккумулятора
89 Датчик тока генератора переменного тока
90 Часть управления остановкой двигателя на холостом ходу
100 Часть управления SOC
110 Часть оценки целевого SOC
112 Часть прогнозирования окружения движения
114 Часть прогнозирования рассматриваемого состояния транспортного средства
116 Часть вычисления требуемого уровня распределения SOC
118 Часть вычисления целевого SOC
120 Часть вычисления SOC аккумулятора
130 Часть управления с обратной связью
200 Автомобиль.
Реферат
Раскрыто устройство и способ управления транспортным средством. Транспортное средство, включает в себя двигатель и аккумулятор. Аккумулятор может заряжаться генератором электроэнергии. Генератор приводится в действие мощностью от двигателя. Устройство управления транспортным средством содержит электронный блок управления. Блок управления выполнен с возможностью выполнения управления остановкой двигателя на холостом ходу, определения состояние заряда аккумулятора и повторяющимся образом задания емкости для остановки двигателя на холостом ходу. Ёмкость, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя, в используемом SOC-диапазоне аккумулятора, в то время как транспортное средство движется. Также повторяющимся образом производится управление количеством электроэнергии, чтобы не допускать падения ниже емкости для остановки двигателя на холостом ходу. Электронный блок управления выполнен с возможностью прогнозирования окружения движения транспортного средства, в котором транспортное средство останавливается. Достигается улучшение топливной экономичности транспортных средств. 3 н. и 3 з.п. ф-лы, 6 ил.
Формула
выполнения управления остановкой двигателя на холостом ходу;
определения состояние заряда (SOC) аккумулятора;
повторяющимся образом задания емкости для остановки двигателя на холостом ходу, которая, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя, во время управления остановкой двигателя на холостом ходу, в используемом SOC-диапазоне аккумулятора, в то время как транспортное средство движется; и
повторяющимся образом управления количеством электроэнергии, чтобы не допускать падения оставшейся емкости в используемом SOC-диапазоне, соответствующем состоянию заряда, ниже емкости для остановки двигателя на холостом ходу, в то время как транспортное средство движется;
причем электронный блок управления выполнен с возможностью прогнозирования окружения движения транспортного средства, в котором транспортное средство останавливается, и определения емкости для остановки двигателя на холостом ходу на основе окружения движения.
задания параметра в качестве емкости для остановки двигателя на холостом ходу задает параметр, причем параметр определяет коэффициент распределения, с которым используемый SOC-диапазон аккумулятора распределяется между емкостью для управления зарядом и емкостью для остановки двигателя на холостом ходу, причем емкость для управления зарядом требуется в результате уменьшения генерирования электроэнергии генератором электроэнергии.
при этом электронный блок управления выполнен с возможностью вычисления рассматриваемого состояния транспортного средства, которое относится к рабочим условиям вспомогательных механизмов, и определения емкости для остановки двигателя на холостом ходу на основе рассматриваемого состояния транспортного средства в дополнение к окружению движения.
при этом электронный блок управления выполнен с возможностью вычисления рассматриваемого состояния транспортного средства, которое относится к рабочим условиям вспомогательных механизмов, и определения емкости для остановки двигателя на холостом ходу на основе рассматриваемого состояния транспортного средства.
двигатель;
аккумулятор, который заряжается количеством электроэнергии, генерируемой генератором электроэнергии, который приводится в действие мощностью от двигателя; и
электронный блок управления, выполненный с возможностью:
выполнения управления остановкой двигателя на холостом ходу;
определения состояние заряда (SOC) аккумулятора;
повторяющимся образом задания емкости для остановки двигателя на холостом ходу, которая, как прогнозируется, должна использоваться в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя, во время управления остановкой двигателя на холостом ходу, в используемом SOC-диапазоне аккумулятора, в то время как транспортное средство движется; и
повторяющимся образом управления количеством электроэнергии, чтобы не допускать падения оставшейся емкости в используемом SOC-диапазоне, соответствующем состоянию заряда, ниже емкости для остановки двигателя на холостом ходу, в то время как транспортное средство движется;
причем электронный блок управления выполнен с возможностью прогнозирования окружения движения транспортного средства, в котором транспортное средство останавливается, и определения емкости для остановки двигателя на холостом ходу на основе окружения движения.
выполняют управление остановкой двигателя на холостом ходу посредством электронного блока управления;
определяют посредством электронного блока управления состояние заряда (SOC) аккумулятора;
повторяющимся образом задают посредством электронного блока управления емкость для остановки двигателя на холостом ходу, которая, как прогнозируется, должна быть использована в периоде остановки-запуска двигателя между остановкой и повторным запуском двигателя, во время управления остановкой двигателя на холостом ходу, в используемом SOC-диапазоне аккумулятора, в то время как транспортное средство движется; и
повторяющимся образом управляют посредством электронного блока управления количеством электроэнергии, чтобы не допускать падения оставшейся емкости в используемом SOC-диапазоне, соответствующем состоянию заряда, ниже емкости для остановки двигателя на холостом ходу, в то время как транспортное средство движется;
прогнозируют окружение движения транспортного средства, в котором транспортное средство останавливается, и определяют емкость для остановки двигателя на холостом ходу на основе окружения движения.
Документы, цитированные в отчёте о поиске
Устройство и способ управления подачей электрической мощности для гибридного транспортного средства
Комментарии