Гибридное транспортное средство - RU2513087C1
Код документа: RU2513087C1
Чертежи

















Описание
Область техники
Настоящее изобретение относится к гибридному транспортному средству, оснащенному двигателем и электромотором в качестве источников приведения в движение.
Уровень техники
Патентный Документ 1 раскрывает технологию, в которой в гибридном транспортном средстве, включающем в себя двигатель и первый электромотор, оба из которых соединены с ведущими колесами, и второй электромотор, который допускает формирование электроэнергии с использованием, по меньшей мере, части мощности из двигателя, первый электромотор и второй электромотор управляются с возможностью возбуждения так, что они модифицируют частоту вращения двигателя с тем, чтобы подавлять влияние, когда плотность воздуха варьируется, так что выходная мощность двигателя становится практически равной целевому значению.
Помимо этого, Патентный Документ 2 раскрывает другую технологию, в которой в гибридном транспортном средстве, включающем в себя множество источников приведения в движение, состоящих из двигателя и электромоторов, при этом электромоторы управляют движущей силой транспортного средства, и трансмиссии, состоящей из планетарных передач, в случае, если выходная мощность двигателя уменьшается вследствие варьирования в атмосферном давлении и т.д., и крутящий момент транспортного средства согласно намерению водителя транспортного средства не достигается, электромоторы дополняют недостающую часть крутящего момента транспортного средства, чтобы получать крутящий момент транспортного средства согласно намерению водителя.
Патентные документы
Патентный Документ 1: JP 2005-351259
Патентный Документ 2: JP 2000-104590
Сущность изобретения
Тем не менее, поскольку в гибридном транспортном средстве, раскрытом в Патентном Документе 1, на выходные крутящие моменты этих первого и второго электромоторов не влияет плотность воздуха, когда частота вращения двигателя модифицируется посредством первого и второго электромоторов так, чтобы подавлять влияние, когда плотность воздуха варьируется, создается ступенчатая разность в движущей силе транспортного средства, когда состояние вождения переходит из состояния, в котором движущая сила транспортного средства формируется посредством двигателя, в состояние, в котором движущая сила транспортного средства формируется посредством электромотора с остановленным двигателем, и, следовательно, имеется вероятность того, что у водителя транспортного средства возникает неприятное ощущение.
Помимо этого, в гибридном транспортном средстве, описанном в Патентном Документе 2, возникает такая проблема, что потребляемая электроэнергия аккумулятора транспортного средства увеличивается при попытке компенсации всей недостаточной части выходного крутящего момента двигателя посредством дополняющих крутящих моментов электромоторов. Помимо этого, в случае, если недостаточная часть выходного крутящего момента двигателя дополняется посредством электромоторов в случае, когда каждый из электромоторов вырабатывает электроэнергию, нагрузка при выработке электроэнергии электромоторов уменьшается, так что имеется вероятность того, что больше не может обеспечиваться достаточная величина выработки электроэнергии.
Следовательно, согласно настоящему изобретению в гибридном транспортном средстве, имеющем первый режим движения, в котором транспортное средство приводится в движение с использованием выходной мощности двигателя, и второй режим движения, в котором транспортное средство приводится в движение через выходную мощность электромотора с остановленным двигателем, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха, выходная мощность электромотора во втором режиме движения уменьшается относительно выходной мощности электромотора при стандартной плотности воздуха.
Краткое описание чертежей
Фиг. 1 является пояснительным видом, в виде диаграммы конфигурацию системы гибридного транспортного средства, к которому применимо настоящее изобретение.
Фиг. 2 является пояснительным видом, представляющим в виде диаграммы корреляцию между максимальным крутящим моментом и рабочей областью двигателя, когда транспортное средство движется по городской улице.
Фиг. 3 является пояснительным видом, схематически и примерно представляющим коррекцию крутящего момента двигателя в случае, если плотность воздуха повышается, согласно настоящему изобретению.
Фиг. 4 является пояснительным видом, схематически и примерно представляющим коррекцию крутящего момента двигателя в случае, если плотность воздуха уменьшается, согласно настоящему изобретению.
Фиг. 5 является пояснительным видом, схематически и примерно представляющим поведение движущей силы, когда режим движения переключается в случае, если плотность воздуха повышается.
Фиг. 6 является пояснительным видом, схематически и примерно представляющим поведение движущей силы, когда режим движения переключается в случае, если плотность воздуха уменьшается.
Фиг. 7 является пояснительным видом, схематически и примерно представляющим последовательность операций вычисления команд управления крутящим моментом для двигателя и электромотора.
Фиг. 8 является таблицей вычисления поправочного коэффициента TTEHOST температуры всасываемого воздуха.
Фиг. 9 является таблицей вычисления значения TTEHOSA коррекции.
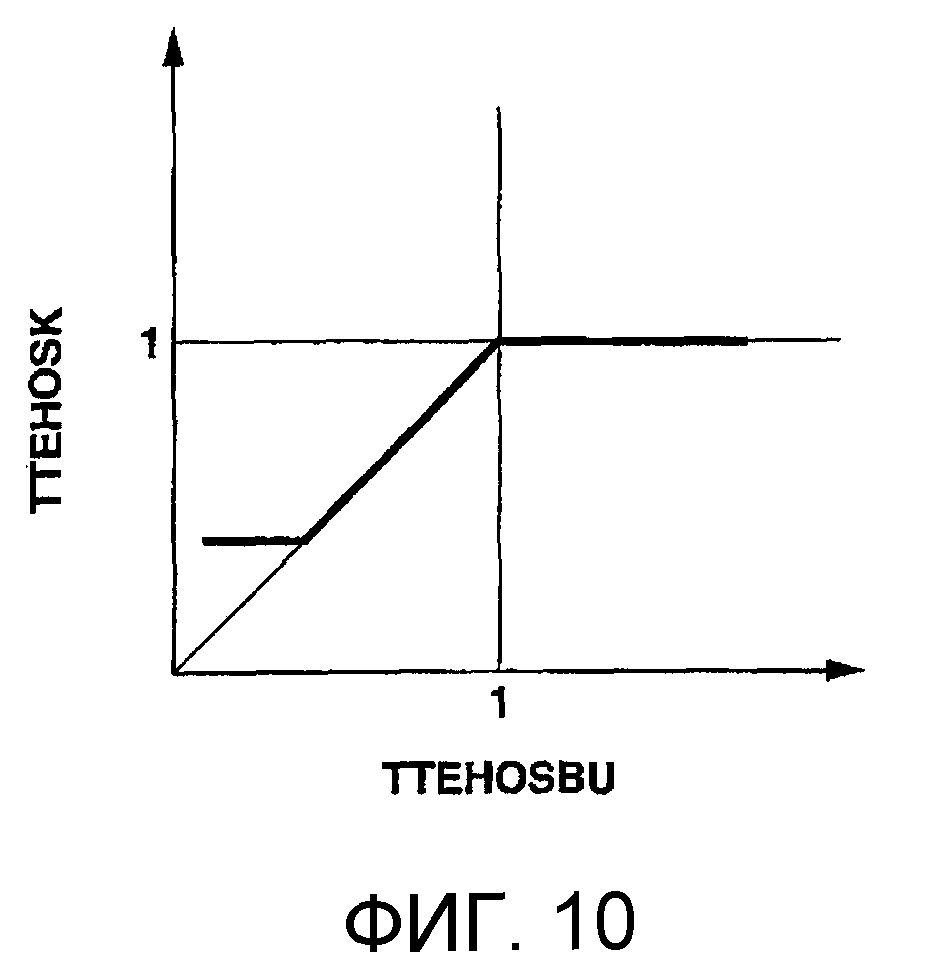
Фиг. 10 является таблицей вычисления фактической скорости TTEHOSK коррекции.
Фиг. 11 является пояснительным видом, представляющим в виде диаграммы разность в фактическом крутящем моменте согласно разности в плотности воздуха в транспортном средстве, оснащенном только двигателем в качестве источника приведения в движение.
Фиг. 12 является пояснительным видом, представляющим в виде диаграммы разность в фактическом крутящем моменте двигателя вследствие разности в плотности воздуха в гибридном транспортном средстве, оснащенном двигателем и электромотором в качестве источников приведения в движение.
Фиг. 13 является пояснительным видом, представляющим в виде диаграммы последовательность операций процедуры вычисления в HCM во втором предпочтительном варианте осуществления согласно настоящему изобретению.
Фиг. 14 является пояснительным видом, представляющим в виде диаграммы подробности процедуры вычисления скорости уменьшения крутящего момента двигателя.
Фиг. 15 является пояснительным видом, представляющим в виде диаграммы подробности процедур вычисления целевого входного крутящего момента Tm и команды управления целевым крутящим моментом приведения в движение.
Фиг. 16 является пояснительным видом, представляющим в виде диаграммы подробности процедуры вычисления команды управления целевым крутящим моментом муфты во время переключения передач.
Фиг. 17 является пояснительным видом, представляющим в виде диаграммы подробности процедуры вычисления оцененного крутящего момента Tn двигателя.
Фиг. 18 является блок-схемой последовательности операций способа, представляющей последовательность операций управления во втором варианте осуществления согласно настоящему изобретению.
Фиг. 19 является блок-схемой последовательности операций способа, представляющей последовательность операций управления при вычислении скорости уменьшения крутящего момента двигателя.
Фиг. 20 является пояснительным видом, представляющим в виде диаграммы подробности процедуры вычисления целевого входного крутящего момента Tm в третьем предпочтительном варианте осуществления согласно настоящему изобретению.
Подробное описание вариантов осуществления изобретения
В случае, если в гибридном транспортном средстве согласно настоящему изобретению, описанном ниже, ступенчатая разность в движущей силе транспортного средства, когда режим движения переключается между первым режимом движения, в котором выходная мощность двигателя используется для того, чтобы приводить в движение транспортное средство (HEV-режимом движения, как описано ниже в этом документе), и вторым режимом движения, в котором транспортное средство приводится в движение через выходную мощность электромотора с остановленным двигателем (EV-режимом движения, как описано ниже), может исключаться или сокращаться. Это обусловлено тем, что в случае, если плотность воздуха уменьшается и ниже стандартной плотности воздуха, выходная мощность электромотора во втором режиме движения уменьшается относительно выходной мощности электромотора, когда плотность воздуха не уменьшается и не ниже стандартной плотности воздуха, так что движущая сила транспортного средства во втором режиме движения приближается к движущей силе транспортного средства в первом режиме движения, когда переключается режим движения.
Далее, в случае, если в гибридном транспортном средстве согласно настоящему изобретению плотность воздуха уменьшается и ниже стандартной плотности воздуха, выходная мощность электромотора во втором режиме движения уменьшается по сравнению с выходной мощностью электромотора, когда плотность воздуха не уменьшается и не ниже стандартной плотности воздуха. Следовательно, можно исключать или сокращать ступенчатую разность в движущей силе транспортного средства, когда режим движения переключается между первым режимом движения и вторым режимом движения, например, в случае, если первый режим движения находится в состоянии движения с выработкой электроэнергии без компенсации так, что вся недостаточность в выходной мощности двигателя, вызываемая посредством уменьшения плотности воздуха по сравнению с стандартной плотностью воздуха, компенсируется посредством такого управления крутящим моментом электромотора, чтобы уменьшать крутящий момент выработки электроэнергии электромотора (в отношении уменьшения величины выработки электроэнергии).
Помимо этого, в случае, если, например, первый режим движения является состоянием движения с использованием помощи электромотора, можно исключать или сокращать ступенчатую разность движущей силы транспортного средства, когда режим движения переключается между первым режимом движения и вторым режимом движения без компенсации так, что вся недостаточность в выходной мощности двигателя, вызываемая посредством уменьшения плотности воздуха по сравнению с стандартной плотностью воздуха, компенсируется посредством такого управления крутящим моментом электромотора, что он дополняется посредством крутящего момента электромотора (в отношении увеличения потребление электроэнергии).
Другими словами, в случае, если в гибридном транспортном средстве согласно настоящему изобретению плотность воздуха уменьшается и ниже стандартного объема воздуха, выходная мощность электромотора во втором режиме движения уменьшается относительно выходной мощности электромотора, когда плотность воздуха не уменьшается и не ниже стандартной плотности воздуха. Таким образом, ступенчатая разность в движущей силе транспортного средства исключается или сокращается, когда режим движения переключается между первым режимом движения и вторым режимом движения. В это время, по сравнению со случаем, в котором вся недостаточность выходной мощности (величина, на которую уменьшается выходная мощность двигателя) двигателя, вызываемая посредством уменьшения в величине воздуха по сравнению с стандартной величиной воздуха, компенсируется посредством управления крутящим моментом электромотора, недостаточная выработка электроэнергии в электромоторе в случае, если первый режим движения находится в состоянии движения с выработкой электроэнергии, может подавляться, и увеличение потребления энергии может подавляться в случае, если первый режим движения является состоянием движения с использованием помощи электромотора.
Предпочтительные варианты осуществления согласно настоящему изобретению далее подробно описаны со ссылкой на чертежи.
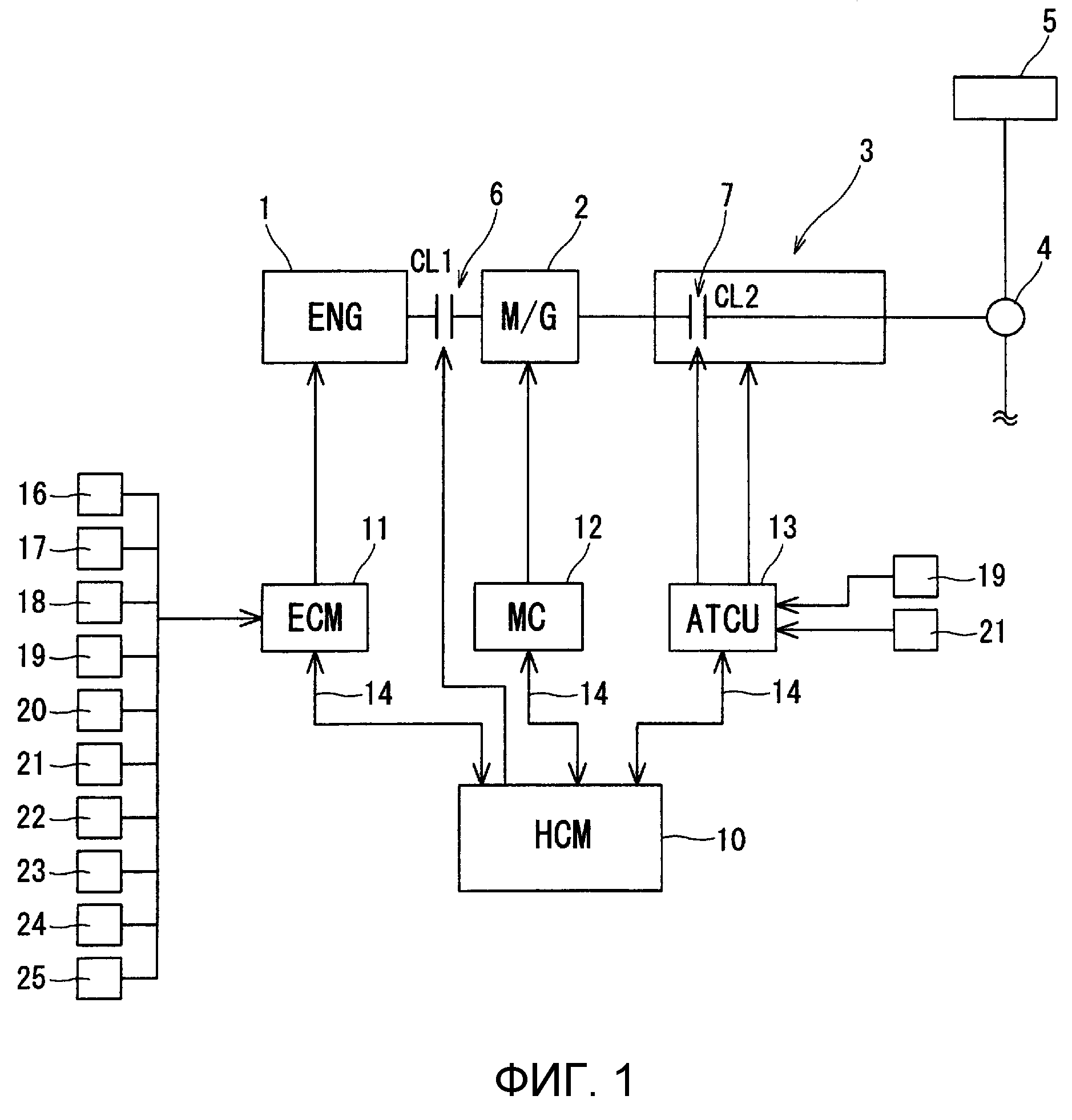
Фиг. 1 схематически показывает пояснительный вид конфигурации системы гибридного транспортного средства, к которому применимо настоящее изобретение.
Гибридное транспортное средство включает в себя, например, рядный четырехцилиндровый двигатель (двигатель внутреннего сгорания) 1; электромотор/генератор 2 (описанный в дальнейшем в качестве электромотора 2), который также выступает в качестве генератора, причем как двигатель 1, так и электромотор 2 являются источниками приведения в движение транспортного средства; автоматическую трансмиссию 3, которая передает мощность двигателя 1 и электромотора 2 на ведущие колеса 5 через дифференциал 4; первую муфту 6 (CL1), размещенную между двигателем 1 и электромотором 2; и вторую муфту 7 (CL2), размещенную между электромотором 2 и ведущими колесами 5.
Автоматическая трансмиссия 3, например, автоматически переключает (выполняет управление переключением передач) передаточное отношение множества ступеней, к примеру, пять скоростей переднего хода и одну скорость заднего хода или шесть скоростей переднего хода и одну скорость заднего хода в соответствии со скоростью транспортного средства, углом открытия акселератора и т.д. Эта автоматическая трансмиссия 3 содержит ступень зубчатой передачи, во внутренней части которой задействована односторонняя муфта, из множества ступеней переключения передач. Помимо этого, вторая муфта 7 в этом варианте осуществления не обязательно является муфтой, которая дополнительно добавляется в качестве специальной муфты, а вместо этого некоторый элемент трения для выбора ступеней переключения передач переднего хода или вместо этого некоторый элемент муфты для выбора ступени переключения передач заднего хода из множества элементов трения используется для второй муфты 7 автоматической трансмиссии 3.
Следует отметить, что автоматическая трансмиссия 3 не ограничивается вышеописанной ступенчатой трансмиссией, а может состоять из бесступенчатой трансмиссии.
Это гибридное транспортное средство включает в себя: HCM (гибридный модуль управления) 10, который выполняет интегрированное управление для транспортного средства; ECM (модуль управления двигателем) 11; MC (контроллер электромотора) 12; и ATCU (модуль управления автоматической трансмиссией) 13.
HCM 10 подключается к ECM 11, MC 12 и ATCU 13 через линию 14 связи, которая может выполнять взаимный обмен информацией.
ECM 11 вводит выходные сигналы из датчика 16 частоты вращения двигателя, который определяет частоту вращения двигателя 1; датчика 17 угла поворота коленчатого вала, который определяет угол поворота коленчатого вала; A/F-датчика 18, который определяет состав отработанной смеси "воздух-топливо"; датчика 19 угла открытия акселератора, который определяет угол открытия акселератора из величины нажатия педали акселератора; датчика 20 дросселя, который определяет угол открытия дроссельного клапана; датчика 21 скорости транспортного средства, который определяет скорость транспортного средства; датчика 22 температуры охлаждающей воды, который определяет температуру охлаждающей жидкости двигателя 1; датчика 23 атмосферного давления, который определяет атмосферное давление; датчика 24 температуры всасываемого воздуха, который определяет температуру всасываемого воздуха; и расходомера 25 воздуха, который определяет объем всасываемого воздуха.
ECM 11 управляет двигателем 1 в соответствии с командой управления целевым крутящим моментом двигателя (целевым требуемым крутящим моментом) из HCM 10. В частности, ECM 11 вычисляет угол открытия дросселя, чтобы получать целевой крутящий момент двигателя, определенный посредством HCM 10, с учетом крутящего момента приведения в движение, который требует водитель транспортного средства, на основе угла открытия акселератора, величины заряда аккумулятора, как описано ниже, или состояния движения транспортного средства (например, состояния ускорения или замедления). Дроссельный клапан двигателя управляется согласно вычисленному углу открытия дроссельного клапана, и объем всасываемого воздуха, полученный в это время, определяется посредством расходомера 25 воздуха, и топливо подается в двигатель 1, чтобы получать предварительно определенный состав смеси "воздух-топливо" на основе определенного объема всасываемого воздуха. Следует отметить, что информация из каждого из вышеописанных датчиков выводится в HCM 10 через линию 14 связи.
MC 12 управляет электромотором 2 в соответствии с командой управления целевым крутящим моментом электромотора и т.д. из HCM 10. Помимо этого, приведение в движение с потреблением энергии, во время которого электроэнергия, подаваемая из аккумулятора (не показан), применяется к электромотору 2, приведение в движение рекуперации энергии, во время которого электромотор 2 выступает в качестве генератора мощности и во время которого вышеописанный аккумулятор заряжается, и переключение между активацией и остановкой электромотора 2 управляется посредством MC 12. Следует отметить, что вывод (значение тока) электромотора 2 отслеживается посредством MC 12. Другими словами, MC 12 определяет выходную мощность электромотора 2.
ATCU 13 вводит сигналы из вышеописанного датчика 19 угла открытия акселератора, датчика 21 скорости транспортного средства и т.д. ATCU 13 определяет оптимальную ступень переключения передач из скорости транспортного средства, угла открытия акселератора и т.д. и выполняет управление переключением передач согласно перестановке лементов трения во внутренней части автоматической трансмиссии 3. Помимо этого, поскольку вторая муфта 7 состоит из одного элемента трения автоматической трансмиссии 3, вторая муфта 7 также управляется через ATCU 13.
Следует отметить, что зацепление и расцепление первой муфты 6 управляется на основе команды управления первой муфтой из HCM 10. Помимо этого, каждый тип сигналов команд управления, выводимых из HCM 10, к примеру, команда управления целевым крутящим моментом двигателя, команда управления целевым крутящим моментом электромотора, команда управления переключением передач (команда управления второй муфтой) и команда управления первой муфтой, вычисляется в соответствии с состоянием вождения. Помимо этого, HCM 10 вводит информацию по состоянию зарядки и разрядки аккумулятора, информацию о состоянии зарядки (SOC) аккумулятора и входной частоте вращения автоматической трансмиссии 3 (частоте вращения в положении между электромотором 2 и автоматической трансмиссией 3).
Это гибридное транспортное средство включает в себя два режима движения в соответствии с состоянием зацепления и состоянием расцепления первой муфты 6. Первый режим движения является режимом движения с использованием двигателя (HEV-режимом движения), в котором первая муфта 6 находится в состоянии зацепления, и двигатель 1 включен в один из источников динамической мощности. Второй режим движения является режимом движения электромобиля (EV-режимом движения), в котором первая муфта 6 находится в открытом состоянии, и только динамическая мощность электромотора 2 задается в качестве источника динамической мощности, в качестве режима движения с использованием электромотора.
Здесь следует отметить, что вышеописанный HEV-режим движения включает в себя три состояния движения "состояние движения с использованием двигателя", "состояние движения с использованием помощи электромотора" и "состояние движения с выработкой электроэнергии". Состояние движения с использованием двигателя означает, что ведущие колеса 5 приводятся в действие, чтобы перемещаться только с помощью двигателя 1 в качестве источника мощности. Состояние движения с использованием помощи электромотора означает, что ведущие колеса 5 приводятся в действие, чтобы перемещаться с помощью двигателя 1 и электромотора 2 в качестве источников мощности. Состояние движения с выработкой электроэнергии одновременно приводит в действие ведущие колеса 5 с двигателем 1 в качестве источника динамической мощности и, одновременно, задействует электромотор 2 в качестве генератора мощности.
В вышеописанном состоянии движения с выработкой электроэнергии, во время вождения на постоянной скорости транспортного средства и вождения в режиме ускорения, электромотор 2 работает в качестве электрогенератора, использующего мощность двигателя 1, и вырабатываемая электроэнергия используется для зарядки аккумулятора. Помимо этого, во время вождения в режиме замедления энергия торможения используется с электромотором 2 в качестве генератора мощности, чтобы регенерировать энергию торможения.
Следует отметить, что ECM 11 вычисляет целевой угол открытия дросселя из целевого крутящего момента двигателя, вычисленного в соответствии с состоянием вождения, но формируемый крутящий момент повышается или понижается, когда плотность всасываемого воздуха варьируется в соответствии с варьированиями в атмосферном давлении и температуре всасываемого воздуха.
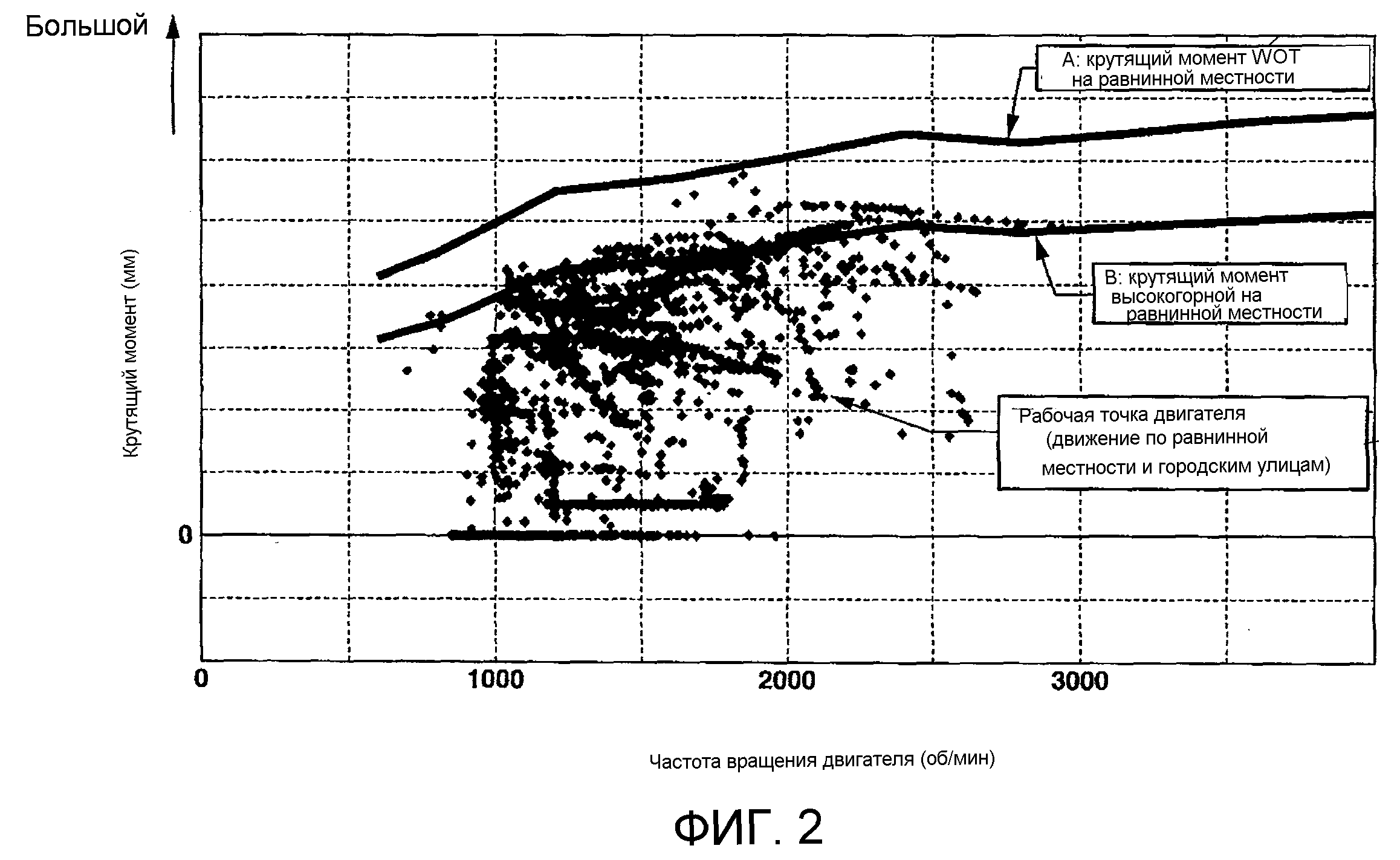
Фиг. 2 является пояснительным видом, представляющим в виде диаграммы корреляцию между максимальным крутящим моментом и рабочей областью двигателя во время движения по городу.
Характеристическая линия A на фиг. 2 обозначает максимальный крутящий момент (момент WOT на равнинной местности), который двигатель 1 может формировать на равнинной местности, характеристическая линия B на фиг. 2 обозначает максимальный крутящий момент (крутящий момент WOT в высокогорной местности), который двигатель 1 может формировать в высокогорной местности (например, на высоте 2000 м), и множество графиков на фиг. 2 обозначают рабочие точки двигателя во время движения на городских улицах на равнинной местности.
Например, в случае, если плотность воздуха понижается, угол открытия дроссельного клапана корректируется в сторону увеличения так, чтобы достигался крутящий момент двигателя, который ожидается в случае, если плотность воздуха не понижается. В частности, в гибридном транспортном средстве следует принимать во внимание из фиг. 2 то, что поскольку рабочие точки двигателя, которые согласуются с крутящим моментом двигателя, который требует HCM 10 на стороне более высокой нагрузки, при котором расход топлива является небольшим, часто используются, и критический крутящий момент является небольшим, ширина, на которую коррекция для крутящего момента двигателя может выполняться согласно коррекции угла открытия дроссельного клапана, сужается. В случае, если уменьшение в плотности воздуха является большим, возникает вероятность того, что крутящий момент двигателя, который требует HCM 10, не может быть реализован даже согласно коррекции угла открытия дроссельного клапана.
Следовательно, в этом варианте осуществления целевой крутящий момент двигателя корректируется в соответствии с плотностью воздуха окружения, в котором транспортное средство движется, и уменьшение движущей силы во время уменьшения величины плотности подавляется, и чрезмерное формирование движущей силы во время повышения величины плотности предотвращается. Кроме того, двигатель 1 и электромотор 2 координируются так, что ступенчатая разность в движущей силе транспортного средства не создается, когда режим движения переключается (переключение HEV-режима движения на EV-режим движения и переключение EV-режима на HEV-режим движения) согласно варьированию в плотности воздуха окружения, в котором транспортное средство движется.
Фиг. 3 и 4 являются пояснительными видами, представляющими в виде диаграммы приблизительные виды коррекции крутящего момента двигателя в соответствии с плотностью воздуха, иллюстрирующими случай, в котором транспортное средство движется в состоянии движения с выработкой электроэнергии HEV-режима движения, и показывают состояния, в которых крутящий момент двигателя включает в себя целевой крутящий момент выработки электроэнергии, чтобы предоставлять выработку электроэнергии электромотора 2, когда величина заряда аккумулятора уменьшается. Фиг. 3 показывает случай, когда, плотность воздуха повышается относительно стандартной плотности воздуха (например, плотности воздуха в случае стандартного атмосферного давления (101,3 кПа) и в случае температуры воздуха 25°C), а фиг. 4 показывает случай, когда, плотность воздуха уменьшается относительно стандартной плотности воздуха (например, стандартное атмосферное давление (101,3 кПа) и в случае температуры воздуха 25°C), соответственно.
Целевой крутящий момент двигателя, который фактически требуется двигателю 1, относительно требуемого крутящего момента приведения в движение от водителя, который требует водитель транспортного средства, является сложением целевого соответствующего выработке электроэнергии крутящего момента, который должен формироваться посредством электромотора 2, и целевого соответствующего трению двигателя крутящего момента с учетом трения, с целевым соответствующим движущей силе крутящим моментом, соответствующим требуемому крутящему моменту приведения в движение от водителя.
В случае, если плотность воздуха повышается относительно стандартной плотности воздуха (например, в случае, если температура всасываемого воздуха уменьшается вследствие движения по холодной области, и плотность воздуха повышается), фактический соответствующий движущей силе крутящий момент фактического крутящего момента двигателя относительно целевого соответствующего выработке электроэнергии крутящего момента увеличивается, фактический соответствующий трению двигателя крутящий момент фактического крутящего момента двигателя увеличивается относительно целевого соответствующего трению двигателя крутящего момента, и фактический соответствующий трению двигателя крутящий момент фактического крутящего момента двигателя для целевого соответствующего трению двигателя крутящего момента увеличивается относительно целевого соответствующего трению двигателя крутящего момента, как показано на фиг. 3.
Например, в случае, если целевой соответствующий движущей силе крутящий момент составляет 100 Н·м, целевой соответствующий выработке электроэнергии крутящий момент составляет 100 Н·м, целевой соответствующий трению двигателя крутящий момент составляет 50 Н·м, и плотность воздуха составляет 120% от стандартной плотности воздуха, фактический крутящий момент двигателя составляет (100+100+50)×1,2=300 Н·м. Если плотность воздуха повышается, фактический соответствующий трению двигателя крутящий момент, соответствующий целевому соответствующему трению двигателя крутящему моменту, увеличивается, и крутящий момент, используемый фактически в качестве фрикционного соответствующего крутящего момента, является идентичным целевому соответствующему трению двигателя крутящему моменту. Следовательно, крутящий момент, фактически используемый для выработки электроэнергии, является идентичным целевому соответствующему трению двигателя крутящему моменту. Помимо этого, фактический соответствующий движущей силе крутящий момент для фактического крутящего момента двигателя дает 300-100-50=150 Н·м, чрезмерный крутящий момент приведения в движение в 50 Н·м получается в результате относительно 100 Н·м требуемого крутящего момента приведения в движение от водителя (целевого соответствующего движущей силе крутящего момента).
Как описано выше, когда плотность воздуха превышает стандартную плотность воздуха, выработка электроэнергии электромотора 2 становится необязательной, поскольку величина заряда аккумулятора увеличивается так, что режим движения переключается на EV-режим движения, в котором только мощность электромотора 2 используется в качестве источника мощности, из состояния движения с выработкой электроэнергии. В этом случае, выходной крутящий момент электромотора 2 по существу совпадает с требуемым крутящим моментом приведения в движение от водителя. Следовательно, избыточность вышеописанного крутящего момента приведения в движение резко снижается, так что создается ступенчатая разность в движущей силе.
Следовательно, в случае, если в этом варианте осуществления плотность воздуха повышается относительно стандартной плотности воздуха, угол открытия дроссельного клапана (не показан) в соответствии с повышением в плотности воздуха регулируется (коррекция уменьшения) так, что целевой крутящий момент двигателя корректируется в сторону снижения. Соответствующий движущей силе крутящий момент и требуемый крутящий момент приведения в движение от водителя, которые получаются после этой коррекции, становятся взаимно равными друг другу.
В частности, целевой соответствующий движущей силе крутящий момент корректируется в сторону уменьшения, так что фактический соответствующий движущей силе крутящий момент становится равным требуемому крутящему моменту приведения в движение от водителя, целевой соответствующий выработке электроэнергии крутящий момент в случае, если плотность воздуха повышается, корректируется в сторону уменьшения, так что фактический соответствующий выработке электроэнергии крутящий момент становится равным целевому соответствующему выработке электроэнергии крутящему моменту, когда плотность воздуха является стандартной плотностью воздуха, и целевой соответствующий трению двигателя крутящий момент в случае, если плотность воздуха повышается, корректируется в сторону уменьшения, так что фактический соответствующий трению двигателя крутящий момент становится равным целевому соответствующему трению двигателя крутящему моменту, когда плотность воздуха является стандартной плотностью воздуха.
Таким образом, поскольку фактический крутящий момент двигателя задается равным целевому крутящему моменту двигателя и требуемый крутящий момент приведения в движение от водителя становится совпадающим с соответствующим движущей силе крутящим моментом после этой коррекции (соответствующим движущей силе крутящим моментом после коррекции), даже если плотность воздуха повышается относительно стандартной плотности воздуха, крутящий момент электромотора в EV-режиме движения, а именно фактический соответствующий движущей силе крутящий момент (требуемый крутящий момент приведения в движение от водителя), практически совпадает с соответствующим движущей силе крутящим моментом (после коррекции) после коррекции в HEV-режиме движения, и можно не допускать создания ступенчатой разности между этими крутящими моментами.
С другой стороны, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха (например, в случае, если атмосферное давление уменьшается и плотность воздуха уменьшается вследствие движения в высокогорной местности), как показано на фиг. 4, фактический соответствующий движущей силе крутящий момент фактического крутящего момента двигателя относительно целевого соответствующего движущей силе крутящего момента снижается, фактический соответствующий выработке электроэнергии крутящий момент фактического крутящего момента двигателя относительно целевого соответствующего движущей силе крутящего момента снижается, и фактический соответствующий трению двигателя крутящий момент фактического крутящего момента двигателя относительно целевого соответствующего трению двигателя крутящего момента снижается.
Например, в случае, если целевой соответствующий движущей силе крутящий момент составляет 100 Н·м, целевой соответствующий выработке электроэнергии крутящий момент составляет 100 Н·м, целевой соответствующий трению двигателя крутящий момент составляет 50 Н·м, и плотность воздуха составляет 80% от стандартной плотности воздуха, фактический крутящий момент двигателя указывает (100+100+50)×0,8=200 Н·м. Если плотность воздуха уменьшается, фактический соответствующий трению двигателя крутящий момент, соответствующий целевому соответствующему трению двигателя крутящему моменту, снижается. Тем не менее, крутящий момент, фактически используемый для трения, является идентичным целевому соответствующему трению двигателя крутящему моменту. Помимо этого, крутящий момент, используемый для выработки электроэнергии, является идентичным целевому соответствующему выработке электроэнергии крутящему моменту. Следовательно, фактический соответствующий движущей силе крутящий момент фактического крутящего момента двигателя указывает 200-100-50=50 Н·м. Следовательно, недостаточный крутящий момент приведения в движение в 50 Н·м относительно 100 Н·м требуемого крутящего момента приведения в движение от водителя (целевого соответствующего движущей силе крутящего момента) получается в результате.
Как описано выше, в случае, если, когда плотность воздуха уменьшается и ниже стандартной плотности воздуха, величина заряда аккумулятора увеличивается, выработка электроэнергии электромотора 2 не требуется, и режим движения переключается из состояния движения с выработкой электроэнергии в EV-режим движения, в котором только мощность электромотора 2 используется в качестве источника приведения в движение, выходной крутящий момент электромотора 2 по существу совпадает с требуемым крутящим моментом приведения в движение от водителя. Таким образом, недостаточная часть крутящего момента приведения в движение, описанного выше, резко исключается, так что ступенчатая разность возникает в движущей силе.
Следовательно, в этом варианте осуществления, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха, такая коррекция, при которой часть фактического соответствующего выработке электроэнергии крутящего момента выделяется фактическому соответствующему движущей силе крутящему моменту, выполняется, чтобы подавлять уменьшение фактического соответствующего движущей силе крутящего момента.
Подробнее, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха во время движения транспортного средства в состоянии движения с выработкой электроэнергии HEV-режима движения, нагрузка при выработке электроэнергии электромотора 2 уменьшается, и доля фактического соответствующего выработке электроэнергии крутящего момента, занимаемого в фактическом крутящем моменте двигателя, относительно уменьшается, так что доля фактического соответствующего движущей силе крутящего момента, занимаемого в фактическом крутящем моменте двигателя, относительно повышается, чтобы подавлять уменьшение соответствующего движущей силе крутящего момента (после коррекции), полученного после коррекции. В этом варианте осуществления нагрузка при выработке электроэнергии электромотора 2 уменьшается, так что, например, соответствующий движущей силе крутящий момент (после коррекции), полученный после коррекции, указывает крутящий момент, соответствующий 80% от требуемого крутящего момента приведения в движение от водителя.
Помимо этого, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха, крутящий момент электромотора для электромотора 2, когда транспортное средство движется в EV-режиме движения, уменьшается, так что крутящий момент электромотора становится равным соответствующему движущей силе крутящему моменту (после коррекции) в HEV-режиме движения после коррекции в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха. Другими словами, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха, выходная мощность электромотора 2 уменьшается относительно выходной мощности электромотора 2, соответствующей требуемому крутящему моменту приведения в движение от водителя, когда плотность воздуха является стандартной плотностью воздуха, когда транспортное средство движется в EV-режиме движения.
Таким образом, в случае, если плотность воздуха уменьшается относительно стандартной плотности воздуха, нагрузка при выработке электроэнергии электромотора 2 уменьшается в HEV-режиме движения, доля фактического соответствующего выработке электроэнергии крутящего момента, занимаемого в крутящем моменте двигателя, уменьшается, и крутящий момент электромотора в EV-режиме движения корректируется так, что он уменьшается синхронно с уменьшением соответствующего движущей силе крутящего момента в HEV-режиме движения. Следовательно, во время, когда режим движения переключается, как показано на фиг. 6, можно не допускать возникновения ступенчатой разности в движущей силе между крутящим моментом электромотора в EV-режиме движения, а именно, фактическим соответствующим движущей силе крутящим моментом (требуемым крутящим моментом приведения в движение от водителя) и соответствующим движущей силе крутящим моментом (после коррекции) после коррекции в HEV-режиме движения.
Более подробно, совместимость между отделением крутящего момента приведения в движение, фактически используемым для того, чтобы приводить в движение транспортное средство, от требуемого крутящего момента приведения в движение от водителя, который должен быть как можно меньшим, и исключением ступенчатой разности движущей силы, когда режим движения переключается между HEV-режимом движения и EV-режимом движения, может устанавливаться, соответственно, в подходящих режимах между случаями, когда плотность воздуха относительно уменьшается и когда плотность воздуха относительно повышается.
В частности, выработка электроэнергии становится необходимой, когда величина заряда аккумулятора уменьшается, хотя крутящий момент двигателя не может быть увеличен, когда плотность воздуха уменьшается и ниже стандартной плотности воздуха, и необходим принудительный переход состояния движения в состояние движения с выработкой электроэнергии HEV-режима движения. В это время становится необходимо переключать режим движения между состоянием движения с выработкой электроэнергии HEV-режима движения и EV-режимом движения, когда плотность воздуха уменьшается. Тем не менее, в этом варианте осуществления крутящий момент электромотора в EV-режиме движения уменьшается синхронно с уменьшением соответствующего движущей силе крутящего момента в HEV-режиме движения, так что расход энергии, накопленной в аккумуляторе в EV-режиме движения, может подавляться. Следовательно, крутящий момент электромотора в EV-режиме движения совпадает с уменьшением нагрузки при выработке электроэнергии электромотора 2 в состоянии движения с выработкой электроэнергии HEV-режима движения без противоречий, и ступенчатая разность в движущей силе может подавляться, в то время как частота переключения режима движения уменьшается. Другими словами, в состоянии движения с выработкой электроэнергии HEV-режима движения, доля фактического соответствующего выработке электроэнергии крутящего момента, занимаемого в фактическом крутящем моменте двигателя, относительно уменьшается, так что доля фактического соответствующего движущей силе крутящего момента, занимаемого в фактическом крутящем моменте двигателя, относительно повышается. Следовательно, нагрузка при выработке электроэнергии в электромоторе 2, чтобы подавлять уменьшение соответствующего движущей силе крутящего момента, полученного после коррекции, совпадает с подавлением потребления энергии, накопленной в аккумуляторе, вследствие уменьшения крутящего момента электромотора в EV-режиме движения, которое соответствует уменьшению соответствующего движущей силе крутящего момента в HEV-режиме движения, и ступенчатая разность в движущей силе может подавляться, в то время как частота переключения режима движения уменьшается. Другими словами, в случае, если плотность воздуха уменьшается, даже если вся недостаточная часть выходной мощности двигателя вследствие уменьшения в плотности воздуха не регулируется при управлении крутящим моментом на стороне электромотора, ступенчатая разность в движущей силе транспортного средства, когда режим движения переключается между HEV-режимом движения и EV-режимом движения, может подавляться.
Подробнее, в случае, если плотность воздуха уменьшается и ниже стандартной плотности воздуха, выходная мощность электромотора в EV-режиме движения уменьшается относительно выходной мощности электромотора, когда плотность воздуха не уменьшается и не ниже стандартной плотности воздуха. Следовательно, в случае, если HEV-режим движения является состоянием движения с использованием помощи электромотора без компенсации посредством управления крутящим моментом электромотора 2 так, что вся недостаточная часть выходной мощности двигателя (часть уменьшения выходной мощности) вследствие уменьшения в плотности воздуха так, что она ниже стандартной плотности воздуха, дополняется посредством управления крутящим моментом электромотора 2 (потребление энергии электромотора 2 увеличивается), ступенчатая разность в движущей силе транспортного средства, когда режим движения переключается между HEV-режимом движения и EV-режимом движения, может исключаться или сокращаться.
Помимо этого, в случае, если HEV-режим движения находится в состоянии движения с выработкой электроэнергии без компенсации посредством управления крутящим моментом электромотора 2 так, что вся недостаточная часть выходной мощности двигателя (часть уменьшения выходной мощности) вследствие уменьшения в плотности воздуха так, что она ниже стандартной плотности воздуха, компенсируется посредством управления крутящим моментом электромотора 2 (величина выработки электроэнергии электромотора 2 снижается), ступенчатая разность в движущей силе транспортного средства, когда режим движения переключается между HEV-режимом движения и EV-режимом движения, может исключаться или сокращаться.
Более подробно, когда ступенчатая разность в движущей силе транспортного средства, когда режим движения переключается между HEV-режимом движения и EV-режимом движения, исключается или сокращается, увеличение потребления энергии электромотора 2 в HEV-режиме движения может подавляться, и недостаточная выработка электроэнергии электромотора 2 в HEV-режиме движения может подавляться, по сравнению со случаем, в котором вся недостаточная часть выходной мощности двигателя (часть уменьшения выходной мощности) вследствие уменьшения в плотности воздуха так, что она ниже стандартной плотности воздуха, компенсируется посредством управления крутящим моментом электромотора 2.
Фиг. 7 является пояснительным видом, представляющим в виде диаграммы последовательность операций вычислений в команде управления крутящим моментом для двигателя 1 и команде управления крутящим моментом для электромотора 2.
ECM 11 вычисляет поправочный коэффициент TTEHOSBU, соответствующий плотности воздуха с использованием атмосферного давления и температуры всасываемого воздуха. Затем движущая сила, создаваемая в двигателе 1, корректируется с использованием поправочного коэффициента TTEHOSBU в ECM 11. Помимо этого, движущая сила, создаваемая в электромоторе 2, корректируется с использованием поправочного коэффициента TTEHOSBU, вычисленного в ECM 11. Этапы S11-S14 являются процессами, выполняемыми в HCM 10, а этапы S21-S25 являются процессами, выполняемыми в ECM 11.
На этапе S11 HCM 10 вычисляет крутящий момент выработки электроэнергии (нагрузку при выработке электроэнергии), требуемый для выработки электроэнергии в электромоторе 2 в случае, если выработка электроэнергии в электромоторе 2 выполняется в соответствии с величиной заряда (SOC) аккумулятора, описанного выше.
На этапе S12 HCM 10 вычисляет целевую движущую силу транспортного средства в соответствии с углом открытия акселератора. Другими словами, на этапе S12, HCM 10 вычисляет целевую движущую силу, соответствующую целевому крутящему моменту двигателя, создаваемому в двигателе 1 в состоянии движения с использованием двигателя HEV-режима движения и в состоянии движения с выработкой электроэнергии HEV-режима движения, вычисляет целевую движущую силу, соответствующую сумме между целевым крутящим моментом двигателя, создаваемым в двигателе 1 в состоянии движения с использованием помощи электромотора HEV-режима движения, и крутящим моментом электромотора (целью помощи при движении), создаваемым в электромоторе 2, или вычисляет целевую движущую силу, соответствующую крутящему моменту электромотора (цели при движении), создаваемому в электромоторе 2 в EV-режиме движения.
На этапе S13 целевая движущая сила, вычисленная на этапе S12, разделяется в двигатель 1 и электромотор 2. Другими словами, HCM 10 определяет долю для двигателя 1 и долю для электромотора 2 из целевых движущих сил.
На этапе S14 HCM 10 выводит команду управления крутящим моментом двигателя в ECM 11 и команду управления крутящим моментом электромотора в MC 12 с использованием информации плотности воздуха (поправочного коэффициента TTEHOSBU) из S23, как описано ниже. Следует отметить, что команда управления крутящим моментом электромотора является значением команды управления крутящим моментом, скорректированным в соответствии с потребностью на основе информации плотности воздуха. С другой стороны, команда управления крутящим моментом двигателя не является значением команды управления на основе информации плотности воздуха, а является значением команды управления крутящим моментом, соответствующим целевому крутящему моменту двигателя.
На этапе S21 ECM 11 вычисляет целевое атмосферное давление PPAMBTTE коррекции крутящего момента на основе входного сигнала из датчика 23 атмосферного давления. Следует отметить, что вместо датчика 23 атмосферного давления давление продувочной линии в продувочной линии, которая идет от топливного бака (не показан) к продувочному регулирующему клапану через фильтр (не показан), обрабатывающей выпаренное топливо, может упоминаться как атмосферное давление. Тем не менее, в этом случае, вычисление атмосферного давления разрешается только тогда, когда продувочный регулирующий клапан непрерывно закрыт в течение предварительно определенного времени или больше. Следует отметить, что парообразное топливо, адсорбированное в фильтре, вводится в канал всасываемого воздуха, когда продувочный регулирующий клапан находится в открытом состоянии.
На этапе S22 ECM 11 вычисляет целевую температуру TANTTE всасываемого воздуха коррекции крутящего момента на основе входного сигнала из датчика температуры 24 всасываемого воздуха. Эта целевая температура TANTTE всасываемого воздуха коррекции крутящего момента вычисляется с учетом влияния температуры окружающей среды двигателя 1.
На этапе S23 ECM 10 вычисляет поправочный коэффициент TTEHOSBU крутящего момента, который является скоростью коррекции атмосферного давления и температуры всасываемого воздуха с использованием целевого атмосферного давления PPAMBTTE коррекции крутящего момента и целевой температуры TANTTE всасываемого воздуха коррекции крутящего момента. Эта скорость коррекции атмосферного давления и температуры всасываемого воздуха является значением коррекции, соответствующим плотности воздуха окружения, в котором транспортное средство движется, и S23 соответствует модулю определения плотности воздуха.
На этом S23 ECM 11 вычисляет базовый поправочный коэффициент TTEHOSB посредством умножения поправочного коэффициента TTEHOSP атмосферного давления, который является делением стандартного атмосферного давления (101,3 кПа) на целевое атмосферное давление PPAMBTTE коррекции крутящего момента, на поправочный коэффициент TTEHOST температуры всасываемого воздуха, вычисленный с использованием целевой температуры TANTTE всасываемого воздуха коррекции крутящего момента и таблицы вычисления TTEHOST, показанной на фиг. 8.
Затем обработка ограничения скорости выполняется для значения TTEHOSA коррекции, которое является значением, полученным посредством коррекции, выполняемой для этого базового поправочного коэффициента TTEHOSB с учетом дисперсии значений датчиков, чтобы получать поправочный коэффициент TTEHOSQBU крутящего момента. Значение TTEHOSA коррекции вычисляется с использованием таблицы вычисления TTEHOSA, показанной на фиг. 9.
Помимо этого, обработка ограничения скорости выполняется для того, чтобы подавлять ступенчатую разность крутящего момента вследствие варьирования поправочного коэффициента TTEHOSBU крутящего момента во время обновления атмосферного давления и температуры всасываемого воздуха. Следует отметить, что поправочный коэффициент TTEHOSBU крутящего момента является значением, которое становится меньшим по мере того, как значение плотности воздуха становится большим.
На этапе S24 целевой крутящий момент двигателя, вычисленный на этапе S14 в HSM 10, вводится в качестве команды управления крутящим моментом двигателя. Целевой крутящий момент TTEP, на основе этой команды, выводится на этапе S25. Этот целевой крутящий момент TTEP соответствует сумме целевого соответствующего движущей силе крутящего момента двигателя 1, целевого соответствующего трению двигателя крутящего момента и целевого крутящего момента выработки электроэнергии.
На этапе S25 ESM 11 корректирует целевой крутящий момент TTEP с использованием поправочного коэффициента TTEHOSBU крутящего момента, чтобы вычислять целевой крутящий момент TTEPHOS после коррекции. В этом варианте осуществления коррекция крутящего момента двигателя выполняется только тогда, когда плотность воздуха выше стандартной плотности воздуха. Следовательно, с использованием таблицы вычисления TTEHOSK, показанной на фиг. 10, фактическая скорость TTEHOSK коррекции вычисляется из поправочного коэффициента TTEHOSBU крутящего момента, и целевой крутящий момент TTEPHOS после коррекции вычисляется посредством умножения целевого крутящего момента TTEP на фактическую скорость TTEHOSK коррекции. Целевой угол открытия дросселя затем задается из этого целевого крутящего момента TTEPHOS после коррекции.
Следует отметить, что в случае, если транспортное средство находится в состоянии движения с использованием двигателя или в состоянии движения с использованием помощи электромотора, когда плотность воздуха уменьшается относительно стандартной плотности воздуха во время движения транспортного средства в HEV-режиме движения, уменьшение фактического крутящего момента приведения в движение двигателя 1 компенсируется посредством увеличения крутящего момента электромотора, так что уменьшение движущей силы транспортного средства относительно требуемого крутящего момента приведения в движение от водителя может подавляться. Здесь следует отметить, что необязательно увеличивать крутящий момент электромотора с тем, чтобы компенсировать все уменьшение фактического крутящего момента приведения в движение двигателя 1 вследствие уменьшения в плотности воздуха, но крутящий момент электромотора, например, может быть увеличен, чтобы компенсировать часть (предварительно определенную скорость) уменьшения фактического крутящего момента приведения в движение, вызываемого посредством уменьшения в плотности воздуха. Затем в EV-режиме движения коррекция для того, чтобы уменьшать выходную мощность электромотора 2, выполняется, так что ступенчатая разность в движущей силе транспортного средства не возникает, когда режим движения переключается между HEV-режимом движения и EV-режимом движения.
Затем в варианте осуществления, описанном выше, регулирование выходной мощности (крутящего момента) двигателя 1 осуществляется через угол открытия дросселя. Одновременные регулирования угла открытия дроссельного клапана, распределения зажигания двигателя 1 и времени открытия впускного клапана(ов) в случае, если двигатель 1 содержит механизм регулируемого клапана, выполняются, так что выходная мощность (крутящий момент) двигателя 1 может регулироваться.
Помимо этого, когда в вышеописанном варианте осуществления режим движения переключается между HEV-режимом движения и EV-режимом движения, ступенчатая разность в движущей силе транспортного средства не возникает. Тем не менее, настоящее изобретение не ограничено этим примером, в котором ступенчатая разность в движущей силе транспортного средства, когда режим движения переключается, не возникает. Другими словами, ступенчатая разность движущей силы транспортного средства, когда режим движения переключается, может быть скорректирована так, что она является небольшой. Даже в этом случае, можно не вызывать неприятное ощущение у водителя транспортного средства, когда режим движения переключается.
Кроме того, в вышеописанном варианте осуществления плотность воздуха может быть предварительно определенным одним значением или может быть всеми значениями в предварительно определенном диапазоне.
Другими словами, в случае, если стандартная плотность воздуха равна всем значениям в предварительно определенном стандартном диапазоне, определение того, что определенная плотность воздуха уменьшается относительно стандартной плотности воздуха, может выполняться, когда значение определенной плотности воздуха уменьшается, превышая предварительно определенный стандартный диапазон, определение того, что определенная плотность воздуха повышается относительно стандартной плотности воздуха, может выполняться, когда значение определенной плотности воздуха повышается, превышая предварительно определенный стандартный диапазон, и определение того, что определенная плотность воздуха становится совпадающей с стандартной плотностью воздуха, может выполняться, если определенная плотность воздуха находится в предварительно определенном стандартном диапазоне.
В случае, если транспортное средство движется в высокогорной местности, плотность воздуха понижается по сравнению с низменной местностью. Следовательно, выходная мощность двигателя 1 уменьшается, и крутящий момент приведения в движение транспортного средства относительно понижается. С другой стороны, выходная мощность электромотора 2 не принимает влияние плотности воздуха. Следовательно, в гибридном транспортном средстве, имеющем двигатель 1 и электромотор 2 в качестве источников приведения в движение транспортного средства, ступенчатая разность в движущей силе транспортного средства возникает, когда плотность воздуха варьируется. Таким образом, когда режим движения переключается, в то время как плотность воздуха варьируется, ступенчатая разность создается в движущей силе транспортного средства. Следовательно, в этом варианте осуществления, описанном выше, как уже описано, двигатель 1 координируется с электромотором 2 так, что он не формирует ступенчатую разность в движущей силе транспортного средства.
Когда транспортное средство, имеющее только двигатель в качестве источника приведения в движение, и гибридное транспортное средстве, имеющее двигатель и электромотор/генератор в качестве источников приведения в движение, сравниваются друг с другом, зачастую существуют случаи, в которых уменьшение движущей силы в гибридном транспортном средстве становится большим в высокогорной местности, в которой плотность воздуха уменьшается, хотя крутящий момент приведения в движение, который требуется каждому из транспортных средств, является взаимно идентичным.
Фиг. 11 является пояснительным видом, представляющим в виде диаграммы разность в фактическом крутящем моменте двигателя (крутящем моменте, который двигатель фактически выводит) вследствие разности в плотности воздуха в транспортном средстве, имеющем только двигатель в качестве источника приведения в движение. Фиг. 12 является пояснительным видом, представляющим в виде диаграммы разность в фактическом крутящем моменте двигателя (крутящем моменте, который двигатель фактически выводит) вследствие разности в плотности воздуха в случае, если крутящий момент двигателя включает в себя крутящий момент приведения в движение транспортного средства, передаваемый на ведущие колеса, и крутящий момент выработки электроэнергии, который предоставляет выработку электроэнергии посредством электромотора в гибридном транспортном средстве, оснащенном двигателем и электромотором в качестве источников приведения в движение.
На фиг. 11 во время движения в низменной местности (обычной), в которой плотность воздуха является высокой, целевой крутящий момент Te* двигателя (крутящий момент Tfric трения двигателя не включается) соответствует целевому крутящему моменту Td* приведения в движение транспортного средства. В это время крутящий момент, который двигатель фактически выводит (фактический крутящий момент Te1 двигателя), является значением, включающим в себя трение Tfric двигателя. Затем, когда состояние движения за исключением плотности воздуха является идентичным, фактический крутящий момент Td1 приведения в движение предоставляет значение, меньшее целевого крутящего момента Td* приведения в движение транспортного средства посредством ∆T1, когда транспортное средство движется в высокогорной местности, в котором плотность воздуха является низкой. В это время фактический крутящий момент Te2 двигателя, который является крутящим моментом, фактически выводимым посредством двигателя, предоставляет значение, меньшее фактического крутящего момента Te1 двигателя в низменной местности (обычной), в которой плотность воздуха является высокой, посредством ∆T1. Следует отметить, что фактический крутящий момент Td1 приведения в движение в это время является величиной, деленной на трение Tfric двигателя из фактического крутящего момента Te2 двигателя.
На фиг. 12 во время движения в низменной местности (обычной), в которой плотность воздуха является высокой, целевой крутящий момент Te* двигателя (который не включает в себя трение Tfric двигателя) соответствует целевому крутящему моменту Td* транспортного средства. Крутящий момент, который двигатель фактически выводит в это время (фактический крутящий момент Te3 двигателя), предоставляет значение, включающее в себя трение Tfric двигателя и крутящий момент Tp выработки электроэнергии, который предоставляет выработку электроэнергии в электромоторе. Затем, когда состояние движения за исключением плотности воздуха является идентичным во время движения в высокогорной местности, при котором плотность воздуха является низкой, крутящий момент (фактический крутящий момент Te4 двигателя), который фактически выводит двигатель, предоставляет значение, меньшее фактического крутящего момента Te3 двигателя в низменной местности (обычной), в которой плотность воздуха является высокой, посредством ∆T2. Фактический крутящий момент Td2 приведения в движение в это время предоставляет величину, которая является вычитанием трения Tfric двигателя и крутящего момента Tp выработки электроэнергии из фактического крутящего момента Te4 двигателя.
Следует отметить, что хотя скорость уменьшения фактического крутящего момента Te двигателя вследствие уменьшения в плотности воздуха является константой, крутящий момент Tp выработки электроэнергии является константой независимо от плотности воздуха. Если целевой крутящий момент Td* приведения в движение на фиг. 11 имеет значение, идентичное значению целевого крутящего момента Td* приведения в действие на фиг. 12, фактический крутящий момент Te3 двигателя превышает фактический крутящий момент Te1 двигателя на величину, соответствующую сложению крутящего момента Tp выработки электроэнергии с целевым крутящим моментом Te* двигателя. Следовательно, величина уменьшения крутящего момента, когда плотность воздуха уменьшается, становится большей (∆T2>∆T1).
Следовательно, во втором предпочтительном варианте осуществления согласно настоящему изобретению, в случае, если величина уменьшения фактического крутящего момента Te двигателя вследствие уменьшения в плотности воздуха не может подавляться в гибридном транспортном средстве, крутящий момент Tp выработки электроэнергии подавляется, чтобы подавлять величину уменьшения фактического крутящего момента Td приведения в движение, чтобы обеспечивать общую характеристику управляемости, и двигатель и электромотор координируются друг с другом, чтобы обеспечивать баланс между величиной использования мощности, когда электромотор дополняет движущую силу транспортного средства, и величиной подачи электроэнергии согласно выработке электроэнергии электромотора. Другими словами, дополняющий крутящий момент электромотора и крутящий момент выработки электроэнергии корректируются так, что баланс между ускорением электромотора и рекуперацией электромотора в определенном стиле вождения предоставляет константу независимо от того, движется транспортное средство в высокогорной местности или в низменной местности.
Если поправочный коэффициент выходной мощности двигателя в высокогорной местности относительно низменной местности составляет α, крутящий момент (фактический крутящий момент двигателя) Te, который фактически выводит двигатель, предоставляет Te=(Te*+Tfric)×α-Tfric, если целевым крутящим моментом двигателя является Te* и крутящим моментом трения двигателя является Tfric. Следует отметить, что согласно настоящему изобретению крутящий момент приведения в движение, выводимый на ведущие колеса, предположительно уменьшается на идентичной скорости. Другими словами, фактический крутящий момент Td приведения в движение предоставляет Td=(Td*+Tfric)×α-Tfric. Крутящий момент Tg электромотора, в это время, предоставляет Tg=Td-Te=((Td*+Tfric)×α-Tfric)-((Te*+Tfric)×α-Tfric)=(Td*-Te*)×α.
Другими словами, требуемый крутящий момент Tg электромотора уменьшается на идентичной скорости относительно значения (Td*-Te*), требуемого в низменной местности. Другими словами, в случае, если крутящий момент двигателя уменьшается, движущая сила транспортного средства также уменьшается, и крутящий момент приведения в движение не компенсируется посредством электромотора. Помимо этого, во втором варианте осуществления выходная мощность уменьшается на идентичной скорости коррекции для выработки электроэнергии посредством электромотора и дополнения движущей силы посредством электромотора. Тем не менее, следует отметить, что не всегда обязательно уменьшать выработку электроэнергии посредством электромотора и дополнение движущей силы посредством электромотора на идентичной скорости коррекции, если баланс между величиной использования мощности, когда электромотор дополняет движущую силу транспортного средства, и величиной подачи электроэнергии согласно выработке электроэнергии посредством электромотора может обеспечиваться.
Фиг. 13 является пояснительным видом, представляющим в виде диаграммы последовательности операций вычислений команд управления крутящим моментом в HCM 10 во втором варианте осуществления согласно настоящему изобретению и представляющим последовательность операций вычислений команды управления крутящим моментом двигателя, которая должна выводиться в ECM 11, команды управления крутящим моментом электромотора, выводимой в MC 12, и команды управления целевым крутящим моментом приведения в движение и команды управления целевым крутящим моментом муфты во время переключения передач, которые должны выводиться в ATCU 13. Следует отметить, что в этом втором варианте осуществления последовательности процессов команды управления крутящим моментом двигателя в ECM 11 являются идентичными последовательностям процессов в вышеописанном первом варианте осуществления (идентичными S21-S25 на фиг. 7), так что двойные пояснения относительно последовательностей операций вычислений в ECM 11 опускаются в данном документе.
В этом втором варианте осуществления, на этапе S110 (подробности поясняются ниже), HCM 10 вычисляет скорость уменьшения крутящего момента двигателя с ограничением скорости варьирования, предоставленным для поправочного коэффициента TTEHOSBU, вводимого из ECM 11, чтобы не вызывать резкое изменение в движущей силе. Затем HCM 10 корректирует целевой крутящий момент Td* приведения в движение на этапе S170 (подробности поясняются ниже), корректирует целевой крутящий момент Tc* приведения в движение после переключения передач на этапе S190 (подробности поясняются ниже) и корректирует значение оценки крутящего момента двигателя на основе значения команды управления (предыдущего значения Te*Z целевого крутящего момента двигателя Te*), чтобы определять выработку электроэнергии и дополняющий крутящий момент посредством электромотора 2 на этапе S200 (подробности поясняются ниже).
На этапе S110 HCM 10 вычисляет скорость уменьшения крутящего момента двигателя с использованием поправочного коэффициента TTEHOSBU, который является информацией плотности воздуха, вычисленной в ECM 11 и вводимой в качестве CAN-сигнала через линию 14 связи. Последовательность операций вычисления скорости уменьшения крутящего момента двигателя на этапе S110 подробно описывается ниже со ссылкой на фиг. 14.
На этапе S111 HCM 10 определяет то, имеет CAN-сигнал, эквивалентный вводимому поправочному коэффициенту TTEHOSBU, нормальное значение или нет. Если определяется как нормальное значение, вводимый поправочный коэффициент TTEHOSBU используется. Если определяется как ненормальное значение, вводимый поправочный коэффициент TTEHOSBU не используется, а заменяется на 100% (а именно, "1"). Подробнее, когда анормальность связи между ECM 11 и HCM 10 с использованием линии 14 связи возникает, либо когда сбой в датчике 23 атмосферного давления или температуре 24 всасываемого воздуха возникает, значение вводимого поправочного коэффициента TTEHOSE заменяется на 100%, так что существенная коррекция не выполняется.
На этапе S112 ограничение верхних и нижних значений задается для вводимого поправочного коэффициента TTEHOSBU. Ограничение верхних и нижних значений, например, задается так, что верхнее предельное значение составляет 100%, а нижнее предельное значение составляет 60%. Затем для верхнего предельного значения сторона ECM 11 корректирует поправочный коэффициент TTEHOSBU так, что в случае, если крутящий момент двигателя увеличивается, 100% могут задаваться. Для нижнего предельного значения, нижнее предельное значение может задаваться так, что оно меньше по мере того, как максимальная высота, на которой транспортное средство предположительно движется, задается так, что она больше.
На этапе S113 HCM 10 накладывает ограничение на скорость варьирования вводимого поправочного коэффициента TTEHOSBU. На этом S113 задается ограничение скорости варьирования, например, 0,03 (%/секунда). Следует отметить, что ограничение скорости варьирования 0,03 (%/секунда) задается из скорости варьирования в случае, если транспортное средство продолжает двигаться вверх по подъему 10% со скоростью 100 км/ч.
Таким образом, ограничение верхних и нижних значений и ограничение скорости варьирования задаются для поправочного коэффициента TTEHOSBU. Даже если возникают сбой и анормальности связи в атмосферном давлении 23 и датчике 24 температуры всасываемого воздуха, общая характеристика управляемости может обеспечиваться.
На этапе S120 HCM 10 вычисляет корректирующий движущую силу момент трения двигателя посредством обращения к таблице вычисления трения двигателя (не показана) из частоты вращения электромотора 2. Таблица вычисления трения двигателя задается таким образом, что, например, по мере того как частота вращения электромотора 2 становится выше, вычисленный корректирующий движущую силу момент трения двигателя становится большим. Следует отметить, что в этом варианте осуществления, на этапе S120, корректирующий движущую силу момент трения двигателя задается равным отрицательному значению. Значение, вычисленное на этапе S120, выводится в качестве отрицательного значения.
На этапе S130 HCM 10 вычисляет целевой крутящий момент Te* двигателя посредством обращения к карте вычисления целевого крутящего момента двигателя (не показана) из частоты вращения двигателя и угла открытия акселератора. Карта вычисления целевого крутящего момента двигателя задается таким образом, что, например, по мере того как угол открытия акселератора становится большим, вычисленный крутящий момент двигателя становится большим. Затем в этом втором варианте осуществления целевой крутящий момент Te* двигателя, вычисленный на этапе S130, выводится в ECM 11 в качестве команды управления крутящим моментом двигателя без коррекции посредством поправочного коэффициента TTEHOSBU. Следует отметить, что процесс целевого крутящего момента Te* двигателя в ECM 11 является идентичным первому варианту осуществления, описанному выше.
На этапе S140 HCM 10 вычисляет целевой дополняющий крутящий момент Ta* посредством обращения к карте вычисления целевого дополняющего крутящего момента (не показана) из частоты вращения двигателя и угла открытия акселератора. Карта вычисления целевого дополняющего крутящего момента задается таким образом, что, например, по мере того как угол открытия акселератора становится большим, вычисленный крутящий момент двигателя становится большим.
Затем на этапе S150 HCM 10 суммирует целевой крутящий момент Te* двигателя и целевой дополняющий крутящий момент Ta*, чтобы извлекать целевой крутящий момент Td* приведения в движение.
Затем на этапе S160 HCM 10 суммирует целевой крутящий момент Te* двигателя и целевой дополняющий крутящий момент Ta*, чтобы извлекать целевой крутящий момент Tc* муфты во время переключения передач.
Здесь следует отметить, что целевой крутящий момент Te* двигателя и целевой дополняющий крутящий момент Ta*, вводимые на этапе S150, являются значениями, вычисленными на основе текущей частоты вращения двигателя, и целевой дополняющий крутящий момент Te* и целевой дополняющий крутящий момент Ta*, вводимые на этапе S160, являются значениями, вычисленными на основе частоты вращения двигателя после того, как переключение передач происходит.
На этапе S170 HCM 10 вычисляет целевой входной крутящий момент Tm, который должен выводиться на этапе S120, с использованием скорости уменьшения крутящего момента двигателя, вычисленной на этапе S110, корректирующего движущую силу момента трения двигателя, вычисленного на этапе S120, и целевого крутящего момента Td* приведения в движение, вычисленного на этапе S150. Кроме того, на этапе S170 HCM 10 вычисляет команду управления целевым крутящим моментом приведения в движение, которая является значением команды управления крутящим моментом для второй муфты 7, с использованием скорости уменьшения крутящего момента двигателя, вычисленной на этапе S110, корректирующего движущую силу момента трения двигателя, вычисленного на этапе S120, и целевого крутящего момента Td* приведения в движение, вычисленного на этапе S150, и выводит эту команду управления целевым крутящим моментом приведения в движение в ATCU 13.
Подробности описываются ниже со ссылкой на фиг. 15. Целевой входной крутящий момент Tm вычисляется как результат последовательности процессов на этапах S171-S175, и команда управления целевым крутящим моментом приведения в движение вычисляется как результат последовательности процессов на этапах S176-S180.
Целевой входной крутящий момент Tm является значением, извлеченным посредством умножения значения сложения корректирующего движущую силу момента трения двигателя с целевым крутящим моментом Td* приведения в движение (S171) на скорость уменьшения крутящего момента двигателя (S172), и посредством сложения результата умножения с корректирующим движущую силу моментом трения двигателя (вычитание) (S173). Следует отметить, что корректирующий движущую силу момент трения двигателя задается равным отрицательному значению на этапе S120. Следовательно, фактически, корректирующий движущую силу момент трения двигателя на этапе S171, как описано выше, прибавляется, а на этапе S173 корректирующий движущую силу момент трения двигателя вычитается. Затем, в случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью зубчатой передачи (например, первой скоростью), на которой задействована односторонняя муфта, целевой входной крутящий момент Tm не предоставляет отрицательного крутящего момента на этапе S175 и выводится в качестве целевого входного крутящего момента Tm. Подробнее, на этапе S174 значение, полученное на этапе S173, сравнивается с "0", и одно из значений, которое превышает другое, выводится на этапе S175. В случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью переключения передач (например, первой скоростью), на которой задействована односторонняя муфта, не значение, полученное на этапе S173, а значение, выводимое из S174 на этапе S175, принимается в качестве целевого входного крутящего момента Tm.
Команда управления целевым крутящим моментом приведения в движение извлекается посредством умножения значения сложения корректирующего движущую силу момента трения двигателя с целевым крутящим моментом Td* приведения в движение (S176) на скорость уменьшения крутящего момента двигателя (S177) и посредством сложения (вычитания) корректирующего движущую силу момента трения двигателя с результатом умножения (на этапе S178). Затем, в случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью переключения передач (например, первой скоростью), на которой задействована односторонняя муфта, значение команды управления команды управления целевым крутящим моментом приведения в движение выводится, не давая значение отрицательного крутящего момента на этапе S180. Подробнее, на этапе S179 HCM 10 сравнивает значение, полученное на этапе S178, с "0", так что большее из полученных значений выводится на этапе S180. Если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью переключения передач (например, первой скоростью), на которой задействована односторонняя муфта, значение, полученное на этапе S178, не выводится, но значение, выводимое из S179 на этапе S180, выводится в качестве команды управления целевым крутящим моментом приведения в движение.
Целевой крутящий момент Td* приведения в движение, используемый для того, чтобы вычислять целевой входной крутящий момент Tm, подвергается процессу, чтобы защищать автоматическую трансмиссию 3, так что в случае, если значение, вычисленное на этапе S150, становится равным или превышающим предварительно установленное предварительно определенное верхнее предельное значение, это верхнее предельное значение предоставляет целевой крутящий момент Td* приведения в движение. Помимо этого, коррекция с использованием скорости уменьшения крутящего момента двигателя на этапе S170 всегда выполняется во время движения с тем, чтобы подавлять ступенчатую разность движущей силы между EV-режимом движения и HEV-режимом движения.
На этапе S190 HCM 10 вычисляет команду управления целевым крутящим моментом муфты во время переключения передач, которая является значением команды управления крутящим моментом во время переключения передач для автоматической трансмиссии 3 с использованием скорости уменьшения крутящего момента двигателя, вычисленной на этапе S110, корректирующего движущую силу трения двигателя, вычисленного на этапе S120, и целевого крутящего момента Tc* муфты во время переключения передач, вычисленного на этапе S160, и выводит вычисленную команду управления целевым крутящим моментом муфты во время переключения передач в ATCU 13.
Вышеописанная последовательность процессов на этапе S190 подробно описывается со ссылкой на фиг. 16. Команда управления целевым крутящим моментом муфты во время переключения передач извлекается посредством умножения значения сложения корректирующего движущую силу момента трения двигателя с целевым крутящим моментом Tc* муфты во время переключения передач (S191) на скорость уменьшения крутящего момента двигателя (S192) и посредством сложения (вычитания) корректирующего движущую силу момента трения двигателя с результатом умножения (на этапе S193). Затем, в случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью переключения передач (например, первой скоростью), на которой задействована односторонняя муфта, на этапе S195, после того как значение команды управления команды управления целевым крутящим моментом муфты во время переключения передач не дает отрицательный крутящий момент, команда управления целевым крутящим моментом муфты во время переключения передач выводится. Подробнее, на этапе S194 HCM 10 сравнивает значение, полученное на этапе S193, с "0", и выводит одно из двух сравниваемых значений, которое превышает другое, на этапе S195. В случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью переключения передач (например, первой скоростью), на которой задействована односторонняя муфта, не значение, полученное на этапе S193, а значение, выводимое из S194 на этапе S195, выводится в качестве команды управления целевым крутящим моментом муфты во время переключения передач.
На этапе S200 HCM 10 вычисляет оцененный крутящий момент Tn двигателя, который должен выводиться на этапе S210, с использованием скорости уменьшения крутящего момента двигателя, вычисленной на этапе S110, корректирующего движущую силу момента трения двигателя, вычисленного на этапе S120, и Te*Z, которое является предыдущим значением целевого крутящего момента Te* двигателя, вычисленным на этапе S130.
Подробности на этапе S200 описываются со ссылкой на фиг. 17. Оцененный крутящий момент Tn двигателя извлекается посредством умножения значения сложения корректирующего движущую силу момента трения двигателя с Te*Z, которое является предыдущим значением целевого крутящего момента Te* двигателя (S201), на скорость уменьшения крутящего момента двигателя (S202) и посредством сложения (вычитания) корректирующего движущую силу момента трения двигателя с результатом умножения (на этапе S203). Следует отметить, что, когда оцененный крутящий момент Tn двигателя вычисляется, также можно использовать целевой крутящий момент Te* двигателя (значение тока) вместо Te*Z, которое является предыдущим значением целевого крутящего момента Te* двигателя.
На этапе S204 значение, полученное на этапе S203, подвергается вычислению фильтрации и выводится в качестве оцененного крутящего момента Tn двигателя. Следует отметить, что фильтрация, выполняемая на этапе S204, предназначена для того, чтобы моделировать задержку в фактическом крутящем моменте двигателя относительно значения команды управления.
Затем, на этапе S210, разность между целевым входным крутящим моментом Tm, вычисленным на этапе S170, и оцененным крутящим моментом Tn двигателя, вычисленным на этапе S200, вычисляется как крутящий момент Tg электромотора, который является командой управления крутящим моментом электромотора, и выводится в MC 12.
Как описано выше, выполняются коррекции для команды управления крутящим моментом электромотора, команды управления крутящим моментом двигателя, команды управления целевым крутящим моментом приведения в движение, которая является значением команды управления крутящим моментом для второй муфты 7, и команды управления целевым крутящим моментом муфты, которая является значением команды управления крутящим моментом во время переключения передач для автоматической трансмиссии 3. Таким образом, общая характеристика управляемости транспортного средства может обеспечиваться посредством обеспечения движущей силы, эквивалентной транспортному средству, на котором двигатель внутреннего сгорания смонтирован, из уменьшения в плотности воздуха. Другими словами, в случае, если величина уменьшения фактического крутящего момента двигателя вследствие уменьшения в плотности воздуха в гибридном транспортном средстве не может подавляться, подавление крутящего момента Tp выработки электроэнергии подавляет величину уменьшения фактического крутящего момента Td приведения в движение, так что общая характеристика управляемости транспортного средства может обеспечиваться.
Помимо этого, двигатель 1 может быть координирован с электромотором 2 так, что обеспечивается баланс между величиной использования мощности, когда электромотор 2 дополняет движущую силу транспортного средства, и величиной подачи электроэнергии, вызываемой посредством выработки электроэнергии электромотора 2.
Кроме того, поскольку, в случае, если ступень переключения передач является ступенью зубчатой передачи, на которой задействована односторонняя муфта, команда управления крутящим моментом для автоматической трансмиссии 3 задается таким образом, что команды управления крутящим моментом после коррекции согласно скорости уменьшения крутящего момента двигателя не дают команду управления отрицательным крутящим моментом (S175, S180, S195), уменьшение входной частоты вращения вследствие расцепления односторонней муфты, обратного вращения односторонней муфты и удара от смыкания односторонней муфты может предотвращаться.
Фиг. 18 является блок-схемой последовательности операций способа, представляющей последовательность операций управления в вышеописанном втором варианте осуществления.
На этапе S300 HCM 10 вычисляет скорость уменьшения крутящего момента двигателя с использованием поправочного коэффициента TTEHOSBU, вводимого из ECM 11.
На этапе S310 HCM 10 вычисляет корректирующий движущую силу момент трения двигателя из частоты вращения электромотора 2.
На этапе S320 HCM 10 вычисляет целевой крутящий момент Te* двигателя из частоты вращения двигателя и угла открытия акселератора.
На этапе S330 HCM 10 вычисляет целевой дополняющий крутящий момент Ta* из частоты вращения двигателя и угла открытия акселератора.
На этапе S340 HCM 10 вычисляет оцененный крутящий момент Tn двигателя с использованием скорости уменьшения крутящего момента двигателя, корректирующего движущую силу момента трения двигателя и предыдущего значения Te*Z целевого крутящего момента Te* двигателя.
На этапе S350 HCM 10 корректирует целевой крутящий момент Td* приведения в движение, вычисленный с использованием целевого крутящего момента Te* двигателя и целевого дополняющего крутящего момента Ta*, чтобы вычислять целевой входной крутящий момент Tm, и вычисляет команду управления целевым крутящим моментом приведения в движение, которая является значением команды управления крутящим моментом для второй муфты 7.
На этапе S360 HCM 10 корректирует целевой крутящий момент Tc* муфты во время переключения передач, вычисленный с использованием целевого крутящего момента Te* двигателя и целевого дополняющего крутящего момента Ta*, чтобы вычислять команду управления целевым крутящим моментом муфты во время переключения передач, которая является значением команды управления крутящим моментом во время переключения передач для автоматической трансмиссии 3.
На этапе S370 HCM 10 выводит целевой крутящий момент Te* двигателя в качестве команды управления крутящим моментом двигателя в ECM 11.
На этапе S380 HCM 10 выводит команду управления целевым крутящим моментом приведения в движение, вычисленную на этапе S350, в ATCU 13.
На этапе S390 HCM 10 выводит крутящий момент Tg электромотора, который является разностью между целевым входным крутящим моментом Tm и оцененным крутящим моментом Tn двигателя, в MC 12 в качестве команды управления крутящим моментом электромотора.
На этапе S400 HCM 10 выводит команду управления целевым крутящим моментом муфты во время переключения передач, вычисленную на этапе S360, в ATCU 13.
Фиг. 19 является блок-схемой последовательности операций способа, представляющей последовательность операций управления, когда скорость уменьшения крутящего момента двигателя вычисляется, и соответствует подпрограмме на этапе S300 на фиг. 18.
На этапе S301 HCM 10 определяет то, превышает или нет поправочный коэффициент TTEHOSBU, вводимый из ECM 11, предварительно установленное предварительно определенное нижнее предельное значение. Если определяется как превышающее, процедура переходит к этапу S330. Если определяется как равное или меньшее, процедура переходит к этапу S302. На этапе S302, HCM 10 задает предварительно определенное нижнее предельное значение равным поправочному коэффициенту TTEHOSBU, и процедура переходит к S303.
На этапе S303 ECM 11 определяет то, меньше или нет поправочный коэффициент TTEHOSBU предварительно установленного предварительно определенного верхнего предельного значения. Если определяется как меньшее, процедура переходит к этапу S305. Если определяется как равное или большее, процедура переходит к этапу S304.
На этапе S304 HCM 10 задает предварительно определенное верхнее предельное значение равным поправочному коэффициенту TTEHOSBU. Затем, процедура переходит к этапу S305.
На этапе S305 HCM 10 определяет то, меньше или нет скорость варьирования поправочного коэффициента TTEHOSBU предварительно установленного предельного значения. Если определяется как меньшее, HCM 10 выводит поправочный коэффициент TTEHOSBU в качестве скорости уменьшения крутящего момента двигателя. Если определяется как равное или большее, процедура переходит к этапу S306.
На этапе S306 ограничение скорости варьирования для поправочного коэффициента TTEHOSBU выполняется, и поправочный коэффициент TTEHOSBU на этапе S306 выводится в качестве скорости уменьшения крутящего момента двигателя.
Далее описывается третий предпочтительный вариант осуществления согласно настоящему изобретению. Во втором варианте осуществления фактический крутящий момент Td приведения в движение транспортного средства составляет Td=(Td*+Tfric)×б-Tfric. Здесь следует отметить, что, в случае, когда (Td*+Tfric)<0, Td>Td* так, что фактический крутящий момент Td приведения в движение становится больше целевого крутящего момента Td* приведения в движение. Следовательно, например, во время движения по инерции транспортного средства замедление транспортного средства становится небольшим.
Затем, в случае, когда (Td*+Tfric)>0, Td Следовательно, в третьем варианте осуществления, следующие процедуры вычисления добавляются в процессах вычисления команд управления крутящим моментом во втором варианте осуществления, а именно процесс вычисления целевого входного крутящего момента Tm, процесс вычисления целевой команды управления крутящим моментом и процесс вычисления целевого крутящего момента муфты во время переключения передач. В частности, значение (после коррекции) после коррекции с использованием скорости уменьшения крутящего момента двигателя ограничивается так, что оно не превышает значение до того, как коррекция с использованием скорости уменьшения крутящего момента двигателя выполняется (см. S602 на фиг. 20, как описано ниже), и так, что оно не меньше крутящего момента при медленном движении и крутящего момента приведения в движение во время движения по инерции (см. S601 на фиг. 20, как описано ниже). Затем, когда диапазон переключения передач автоматической трансмиссии 3 находится в P-диапазоне или N-диапазоне, целевой крутящий момент дает 0 (см. S603 на фиг. 20, как описано ниже). Помимо этого, в случае, если автоматическая трансмиссия 3 имеет автоматический режим, в котором ступень переключения передач задается в соответствии с состоянием вождения из множества ступеней переключения передач, и ручной режим, в котором ступень переключения передач задается в соответствии с операцией вручную водителя из множества ступеней переключения передач, значение команды управления команды управления крутящим моментом не предоставляет отрицательный крутящий момент (см. S175 на фиг. 20, как описано ниже) в случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью переключения передач (например, первой скоростью), на которой задействована односторонняя муфта (см. S175 на фиг. 20, как описано ниже). Это обусловлено тем, что в обстановке, в которой водителю требуется торможение двигателем с заданием автоматической трансмиссии 3 в ручном режиме, торможение двигателем становится эффективным, чтобы удовлетворять намерению водителя транспортного средства. Процесс вычисления целевого входного крутящего момента Tm проиллюстрирован с использованием фиг. 20. S171-S173 на фиг. 15, описанные выше, являются процессами, идентичными процессам S171-S173 на фиг. 20. Три последовательности процессов на этапах S601, S602 и S603 (как описано ниже) добавляются на стороне выхода из S173 на фиг. 15. Помимо этого, что касается S175, такое условие, что режим переключения передач автоматической трансмиссии 3 не является ручным режимом, добавляется как новое в третьем варианте осуществления. В противном случае, S175 в третьем варианте осуществления является идентичным S175 во втором варианте осуществления. Как подробно описано, если на этапе S601 абсолютная величина между значением, полученным на этапе S173 (значением, полученным посредством умножения значения, которое является долей корректирующего движущую силу момента трения двигателя от целевого крутящего момента Td* приведения в движение, на скорость уменьшения крутящего момента двигателя и посредством сложения корректирующего движущую силу момента трения двигателя с результатом умножения) с целевым крутящим моментом при медленном движении или целевым крутящим моментом при движении по инерции (целевым крутящим моментом, когда акселератор отпускается), и одно из двух значений, которое превышает другое, выводится на этапе S602. Следует отметить, что случай, в котором первое сравнивается с целевым крутящим моментом при медленном движении, соответствует случаю пуска транспортного средства, а случай, в котором первое сравнивается с целевым крутящим моментом при движении по инерции, соответствует случаю, в котором транспортное средство движется. На этапе S602 HCM 10 сравнивает абсолютную величину между значением, выводимым из S601, и целевым крутящим моментом Td* приведения в движение и выводит одно из двух значений, которое меньше другого, на этапе S603. На этапе S603 в случае, если диапазон переключения передач является P-диапазоном или N-диапазоном и элементы трения в автоматической трансмиссии 3 управляются в направлении положения P-диапазона или N-диапазона, целевой крутящий момент задается равным 0. В противном случае, целевой крутящий момент, вводимый из S602, выводится. В случае, если текущая ступень переключения передач автоматической трансмиссии 3 является ступенью зубчатой передачи (например, первой скоростью), на которой задействована односторонняя муфта, и режим переключения передач автоматической трансмиссии 3 не является ручным режимом, целевой входной крутящий момент Tm на этапе S175 выводится без значения, которое не должно быть отрицательным. Подробнее, на этапе S174 HCM 10 сравнивает значение, полученное на этапе S603, с "0", и одно из двух значений, которое превышает другое, выводится на этапе S175, и в случае, если текущая ступень переключения передач автоматической трансмиссии 3 не является ручным режимом, не значение, выводимое из S603, а значение, выводимое из S174 на этапе S175, допускается в качестве целевого входного крутящего момента Tm. Следует отметить, что в случае, если команда управления целевым крутящим моментом приведения в движение вычисляется, три последовательности процессов на этапах S601-S603 добавляются на стороне выхода из S178 на фиг. 15. На этапе S180 такое условие, что режим переключения передач автоматической трансмиссии 3 не является ручным режимом, добавляется как новое на этапе S180. В случае, если команда управления целевым крутящим моментом муфты во время переключения передач вычисляется, три последовательности процессов на этапах S601-S603 добавляются на стороне выхода из S193 на фиг. 16. На этапе S195 добавляется такое новое условие, что режим переключения передач автоматической трансмиссии 3 не является ручным режимом. Поскольку в третьем варианте осуществления, описанном выше, целевой крутящий момент, скорректированный с использованием скорости уменьшения крутящего момента двигателя, не становится больше целевого крутящего момента до того, как коррекция выполняется с использованием скорости уменьшения крутящего момента двигателя, может обеспечиваться общая характеристика управляемости. Поскольку целевой крутящий момент, скорректированный с использованием скорости уменьшения вращения двигателя, не меньше целевого крутящего момента при медленном движении, может подавляться обратное движение транспортного средства вследствие отсутствия крутящего момента при медленном движении во время пуска на наклоне. Помимо этого, поскольку целевой крутящий момент, скорректированный с использованием скорости уменьшения крутящего момента двигателя, не становится меньше целевого крутящего момента при движении по инерции, может обеспечиваться общая характеристика управляемости, когда отпускается акселератор.
Реферат
Изобретение относится к гибридному транспортному средству. Гибридное транспортное средство содержит двигатель, электромотор, модуль определения плотности воздуха. Двигатель и электромотор являются источниками приведения в движение транспортного средства. Транспортное средство может осуществлять движение на первом и втором режимах. При первом режиме движения выходная мощность двигателя используется для приведения в движение транспортного средства. При втором режиме движения транспортное средство приводится в движение посредством выходной мощности электромотора с остановленным двигателем. Модуль определения плотности воздуха определяет плотность воздуха окружающей среды. Когда определяемая плотность воздуха уменьшается относительно стандартной плотности воздуха, выходная мощность электромотора во втором режиме движения уменьшается относительно выходной мощности электромотора при стандартной плотности воздуха. При этом движущая сила транспортного средства во втором режиме движения, когда режим движения переключается, приближается к движущей силе транспортного средства в первом режиме движения. Технический результат заключается в получении необходимого крутящего момента транспортного средства согласно намерению водителя. 9 з.п. ф-лы, 20 ил.
Формула
Документы, цитированные в отчёте о поиске
Гибридное транспортное средство, способ управления гибридным транспортным средством и устройство выдачи мощности
Комментарии