Система управления силовой передачей транспортного средства - RU154863U1
Код документа: RU154863U1
Чертежи








Описание
СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ ТРАНСПОРТНОГО СРЕДСТВА
ОПИСАНИЕ
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По настоящей заявке испрашивается приоритет по предварительной заявке на патент США №61/883, 914, «СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ» («POWERTRAIN CONTROL SYSTEM) поданной 27 сентября 2013 года, полное содержание которой настоящим фактически включено в состав посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ПОЛЕЗНАЯ МОДЕЛЬ
Настоящая полезная модель относится к системе управления силовой передачей транспортного средства, в частности, к системе регулировки исполнительных механизмов в системе двигателя.
УРОВЕНЬ ТЕХНИКИ
Правительственные постановления по нормам экономии топлива и выброса газообразных отходов стимулировали развитие технологий для двигателей, которые улучшают коэффициент полезного действия двигателя. Эта технология делается возможной повышенным количеством исполнительных механизмов и более изощренными алгоритмами управления. Как следствие, оптимизация установившегося состояния управляющих воздействий силовой передачи значительно повысилась. Оптимизация установившегося состояния может включать в себя исследование каждой точки скорости вращения-нагрузки для определения регулировок комбинации исполнительных механизмов, которые удовлетворяют заданным ограничениям, и получает оптимальные выходные значения для экономии топлива. Однако определение комбинаций 2
исполнительных механизмов для каждой точки скорости вращения-нагрузки может быть сложным и длительным процессом (см. например GB 2,490,751, МПК B60W 10/06; B60W 30/18, опубл. 24.04.2013). В качестве примера, исчерпывающий сбор динамометрических данных и последующая обработка могут требоваться для формирования регулировок исполнительных механизмов для каждой точки скорости вращения-нагрузки. В общем и целом, это может быть продолжительным, сложным, и может привести к повышенным затратам.
СУЩНОСТЬ ПОЛЕЗНОЙ МОДЕЛИ
Авторы в материалах настоящего описания выявили вышеприведенные проблемы и для преодоления по меньшей мере некоторых из них предложили систему управления силовой передачей транспортного средства, содержащую:
двигатель;
силовую передачу, присоединенную между двигателем и колесами транспортного средства;
один или более исполнительных механизмов, выполненных с возможностью изменения выходной мощности силовой передачи; и
контроллер с машиночитаемыми командами, содержащимися в постоянной памяти, для:
в первом состоянии,
определения первого множества регулировок исполнительных механизмов для требуемой выходной мощности; и
создания справочной таблицы динамических узлов (DLUT) только на основании первого множества регулировок исполнительных механизмов; и
во втором состоянии,
определения второго множества регулировок исполнительных механизмов только на основании DLUT.
В одном из вариантов предложена система, в которой первое условие включает в себя работу двигателя только в граничных условиях на регулировочной характеристике скорости вращения-нагрузки двигателя, причем граничные условия включают в себя одно из минимальной скорости вращения при любой нагрузке двигателя, минимальной нагрузки при любой скорости вращения двигателя, максимальной нагрузки при любой скорости вращения двигателя и максимальной скорости вращения при любой нагрузке двигателя.
В одном из вариантов предложена система, в которой второе состояние включает в себя работу двигателя только в неграничных условиях на регулировочной характеристике скорости вращения-нагрузки двигателя.
В одном из вариантов предложена система, в которой создание DLUT на основании первого множества регулировок исполнительных механизмов включает в себя использование модели интерполяции для формирования регулировок исполнительных механизмов для неграничных условий.
В одном из вариантов предложена система, в которой второе состояние следует за первым состоянием.
В одном из вариантов предложена система, в которой определение первого множества регулировок исполнительных механизмов включает в себя адаптивное определение первого множества регулировок исполнительных механизмов для требуемой выходной мощности.
В одном из вариантов предложена система, в которой требуемая выходная мощность является пониженным удельным расходом топлива при торможении.
В одном из вариантов предложена система, в которой один или более исполнительных механизмов включают в себя дроссель, искровое зажигание, кулачки для впускных клапанов и кулачки для выпускных клапанов.
Также описан способ для двигателя, содержащий этапы, на которых получают регулировки исполнительных механизмов для работы двигателя в неграничных условиях регулировочной характеристики скорости вращения-нагрузки двигателя, для которых не проводится адаптивное определение, посредством интерполяции по регулировкам исполнительных механизмов, адаптивно определенных при работе двигателя в граничных условиях регулировочной характеристики скорости вращения-нагрузки двигателя.
В одном из примеров, двигатель сначала (после изготовления) может работать с заранее запрограммированными регулировками. По мере того, как работа двигателя продолжается, и встречаются граничные условия регулировочной характеристики скорости вращения-нагрузки двигателя, могут определяться регулировки двигателя для этих граничных условий. В материалах настоящего описания, граничные условия регулировочной характеристики скорости вращения-нагрузки могут включать в себя одно или более из минимальной скорости вращения на любой нагрузке двигателя, максимальной скорости вращения при любой нагрузке двигателя, минимальной нагрузки при какой-нибудь скорости вращения и максимальной нагрузки при какой-нибудь скорости вращения двигателя, или минимального удельного расхода топлива при торможении (BSFC). Эти определенные регулировки двигателя могут дополнительно адаптироваться для обеспечения требуемых результатов, таких как улучшенная экономия топлива и пониженные выбросы. Дополнительно, эти адаптивно определенные регулировки могут сохраняться и интерполироваться в местоположения на регулировочной характеристике скорости вращения-нагрузки двигателя, для которых адаптивное определение не выполнялось ранее (и не будет выполняться). Интерполяция может выполняться скорее посредством модели двигателя, нежели посредством использования схем адаптивного управления по всей таблице скорости вращения-нагрузки в установившихся условиях. Точность интерполяции может определяться на основании точек, фактически определенных в течение управления в реальном времени. Поэтому, вместо использования схем адаптивного управления по всей таблице скорости вращения-нагрузки двигателя в установившемся состоянии (и таким образом, потребности определения по каждой точке скорости вращения-нагрузки двигателя для определения данных для такой точки), адаптивно определенные данные в выбранном подмножестве (например, граничных условиях) регулировочной характеристики скорости вращения-нагрузки могут интерполироваться или экстраполироваться в местоположения на регулировочной характеристике, для которых адаптивное определение не выполнялось, с использованием модели двигателя.
Таким образом, для уменьшения сложности в контексте систем управления в реальном времени, которые используют справочные таблицы (LUT), может использоваться гибридный подход для оптимизации управляющих воздействий силовой передачи. Гибридный подход может объединять опосредованное адаптивное управление, при котором могут инспектироваться выбранные несколько точек на регулировочной характеристике скорости вращения-нагрузки (по выбору, только по границам нагрузки), с параллельной идентификацией системы справочной таблицы динамических узлов. Справочная таблица динамических узлов затем может использоваться в реальном времени или автономно для определения регулировок исполнительных механизмов установившегося состояния для точек скорости вращения-нагрузки, не определенных явным образом посредством адаптивного управления. Исполнительные механизмы могут включать в себя дроссель, искровое зажигание и установки фаз кулачкового распределения для впускных и выпускных клапанов (в том числе, установку фаз открывания впускных клапанов, установку фаз закрывания впускных клапанов, установку фаз открывания выпускных клапанов и установку фаз закрывания выпускных клапанов). Оптимизация может иметь различные параметры, такие как BSFC, наряду с удовлетворением CA50 (процента угла поворота коленчатого вала, например, 50%) целевых значений сгорания и целевых значений нагрузки.
Таким образом, управляющие воздействия силовой передачи могут оптимизироваться без исчерпывающего сбора данных при работе в реальном времени. Посредством определения адаптивных регулировок исполнительных механизмов только в выбранных областях, например, на границах регулировочной характеристики скорости вращения-нагрузки, каждая точка скорости вращения-нагрузки на регулировочной характеристике может не инспектироваться явным образом для сбора данных. Поэтому, может достигаться значительное сокращение сбора данных и последующей обработки. Кроме того, поскольку моделированные регулировки исполнительных механизмов для точек в пределах границ регулировочной характеристики скорости вращения-нагрузки основаны на адаптивно определенных регулировках для оптимизированных выходных мощностей, может достигаться улучшение экономии топлива и выбросов. В общем и целом, модель может давать возможность уменьшения времени обработки и улучшения эффективности использования топлива.
Следует понимать, что сущность полезной модели, приведенная выше, представлена для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета полезной модели, объем которой однозначно определен формулой полезной модели, которая сопровождает подробное описание. Более того, заявленный предмет полезной модели не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схематичное изображение системы двигателя.
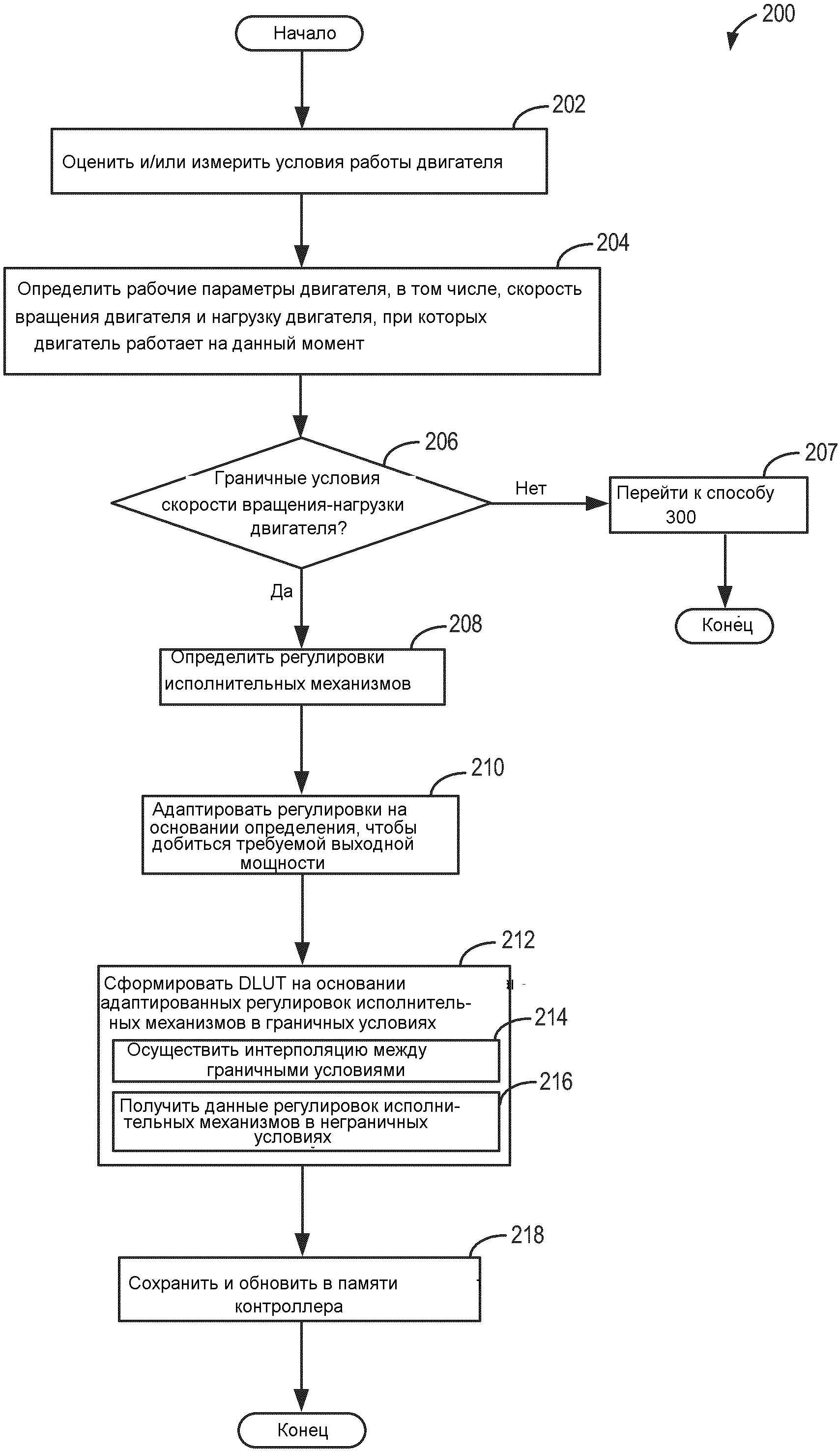
Фиг. 2 изображает примерную блок-схему последовательности операций способа, иллюстрирующую определение регулировок исполнительных механизмов в граничных условиях.
Фиг. 3 изображает примерную блок-схему последовательности операций способа использования справочной таблицы динамических узлов для выяснения регулировок исполнительных механизмов для точек скорости вращения-нагрузки от граничных условий.
Фиг. 4 - примерная система управления адаптивной модели постепенного приближения согласно настоящему раскрытию.
Фиг. 5 показывает график адаптивно управляемых регулировок исполнительных механизмов.
Фиг. 6 показывает изменение нагрузки двигателя относительно командной нагрузки.
Фиг. 7 показывает отклонение CA50 относительно командного значения.
Фиг. 8 изображает изменение удельный расход топлива при торможении во время адаптивного управления.
Фиг. 9 - сравнение между действующими выходными мощностями и оцененными выходными мощностями двигателя на основании регулировок исполнительных механизмов, полученных из справочной таблицы динамических узлов.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ПОЛЕЗНОЙ МОДЕЛИ
Последующее описание относится к системе транспортного средства и способу определения регулировок исполнительных механизмов в системе двигателя, такой как система двигателя по фиг. 1. Регулировки исполнительных механизмов могут определяться и адаптироваться, когда двигатель работает в граничных условиях регулировочной характеристики скорости вращения-нагрузки двигателя (фиг. 2). Справочная таблица динамических узлов (DLUT) может формироваться посредством модели двигателя параллельно адаптивному определению регулировок исполнительных механизмов. ОЬЦТ может включать в себя формирование регулировок исполнительных механизмов для условий двигателя, иных, чем граничные условия скорости вращения-нагрузки. Соответственно, когда неграничные условия возникают в течение работы двигателя в реальном времени, регулировки исполнительных механизмов могут определяться по DLUT (фиг. 3). В примере, описанном в настоящем раскрытии, система опосредованного адаптивного управления (фиг. 4) может использоваться, чтобы давать команду выбранной группы условий на многомерной характеристике скорости вращения-нагрузки, в особенности, нагрузки двигателя на границе регулировочной характеристики скорости вращения-нагрузки (фиг. 6). Регулировки исполнительных механизмов (фиг. 5), которые дают требуемые выходные мощности нагрузки двигателя, также могут определяться посредством адаптивного управления. Кроме того, определенные регулировки исполнительных механизмов могут давать возможность требуемой выходной мощности CA50 (процента угла поворота коленчатого вала, например, 50%) целевого значения сгорания (фиг. 7) и требуемого удельного расхода топлива при торможении (BSFC) (фиг. 8). Как указанно выше, на основании регулировок исполнительных механизмов для командных граничных нагрузок двигателя, DLUT может формироваться посредством интерполяции по точкам, и регулировки двигателя установившегося состояния могут оцениваться для неграничных условий двигателя. Эти оцененные регулировки могут применяться к модели безнаддувного двигателя, и результирующие выходные сигналы параметров, таких как нагрузка, BSFC и CA50, могут измеряться и сравниваться с оцененными выходными сигналами тех же самых параметров (фиг. 9).
Далее, с обращением к фиг. 1, показана система двигателя, которая изображает примерный вариант осуществления камеры или цилиндра сгорания двигателя 10 внутреннего сгорания. Двигатель 10 может принимать параметры управления из системы управления, включающей в себя контроллер 12, и входные данные от водителя 130 транспортного средства через устройство 132 ввода. В этом примере, устройство 132 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала PP положения педали. Цилиндр 14 (в материалах настоящего описания также «камера 14 сгорания») двигателя 10 может включать в себя стенки 136 камеры сгорания с поршнем 138, расположенным в них. Поршень 138 может быть присоединен к коленчатому валу 140, чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 140 может быть присоединен к по меньшей мере одному ведущему колесу пассажирского транспортного средства через систему трансмиссии (не показана). Кроме того, электродвигатель стартера (не показан) может быть присоединен к коленчатому валу 140 через маховик, чтобы давать возможность операции запуска двигателя 10.
Цилиндр 14 может принимать всасываемый воздух через последовательность впускных воздушных каналов 142, 144 и 146. Впускной воздушный канал 146 может сообщаться с другими цилиндрами двигателями 10 в дополнение к цилиндру 14. В некоторых вариантах осуществления, один или более впускных каналов могут включать в себя устройство наддува, такое как турбонагнетатель или нагнетатель. Например, фиг. 1 показывает двигатель 10, сконфигурированный возможным турбонагнетателем (пунктирные линии), включающим в себя компрессор 172, расположенный между впускными каналами 142 и 144, и турбиной 174 в системе выпуска, расположенной вдоль выпускного канала 17 6. Компрессор 172 может по меньшей мере частично приводиться в действие турбиной 17 4 в системе выпуска через вал 180, где устройство наддува выполнено в виде турбонагнетателя. Однако, в других примерах, таких как где двигатель 10 снабжен нагнетателем, турбина 174 в системе выпуска может быть не включена в состав, и компрессор 172 может приводиться в действие механической подводимой мощностью от электродвигателя или двигателя. Перепускная заслонка 168 для выхлопных газов может быть присоединена в параллель турбине 174. Более точно, перепускная заслонка 168 для выхлопных газов может быть включена в перепускной канал 167, присоединенный между входом и выходом турбины 174. Посредством регулировки положения перепускной заслонки 168 для выхлопных газов, может регулироваться величина наддува, обеспечиваемого турбиной.
Дроссель 162, включающий в себя дроссельную заслонку 164, может быть установлен вдоль впускного канала двигателя для изменения расхода и/или давления всасываемого воздуха, подаваемого в цилиндры двигателя. Например, дроссель 162 может быть расположен ниже по потоку от компрессора 172, как показано на фиг. 1, или, в качестве альтернативы, может быть предусмотрен выше по потоку от компрессора 172.
Выпускной коллектор 148 и выпускной канал 176 могут принимать выхлопные газы из других цилиндров двигателя 10 в дополнение к цилиндру 14. Датчик 128 выхлопных газов показан присоединенным к выпускному коллектору 148 выше по потоку от устройства 178 снижения токсичности выхлопных газов. Датчик 128 может быть выбран из числа различных пригодных датчиков для выдачи указания топливно-воздушного соотношения в выхлопных газах, например, таких как линейный кислородный датчик или UEGO (универсальный или широкодиапазонный датчик количества кислорода в выхлопных газах), двухрежимный кислородный датчик или датчик EGO (который изображен), HEGO (подогреваемый EGO), NOx, HC, или CO. Устройство 178 снижения токсичности выхлопных газов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, различными другими устройствами снижения токсичности выхлопных газов или их комбинациями.
Температура выхлопных газов может измеряться одним или более датчиков температуры (не показаны), расположенных в выпускном канале 176. В качестве альтернативы, температура выхлопных газов может логически выводиться на основании условий работы двигателя, таких как скорость вращения, нагрузка, топливно-воздушное соотношение (AFR), запаздывание искрового зажигания, и т.д. Кроме того, температура выхлопных газов может вычисляться по одному или более датчиков 128 выхлопных газов.
Каждый цилиндр двигателя 10 может включать в себя один или более впускных клапанов и один или более выпускных клапанов. Например, цилиндр 14 показан включающим в себя по меньшей мере один впускной тарельчатый клапан 150 и по меньшей мере один выпускной тарельчатый клапан 156, расположенные в верхней области цилиндра 14. В некоторых вариантах осуществления, каждый цилиндр двигателя 10, в том числе, цилиндр 14, может включать в себя по меньшей мере два впускных тарельчатых клапана и по меньшей мере два выпускных тарельчатых клапана, расположенных в верхней области цилиндра.
Впускной клапан 150 может управляться контроллером 12 посредством приведения в действие кулачков через систему 151 кулачкового привода. Подобным образом, выпускной клапан 156 может управляться контроллером 12 через систему 153 кулачкового привода. Каждая из систем 151 и 153 кулачкового привода может включать в себя один или более кулачков и может использовать одну или более из систем переключения профиля кулачков (CPS), регулируемой установки фаз кулачкового распределения (VCT), регулируемой установки фаз клапанного распределения (VVT) и/или регулируемого подъема клапана (VVL), которые могут управляться контроллером 12 для изменения работы клапанов. Работа впускного клапана 150 и выпускного клапана 156 может определяться датчиками положения клапана (не показаны) и/или, соответственно, датчиками 155 и 157 положения распределительного вала. В альтернативных вариантах осуществления, впускной и/или выпускной клапан могут управляться посредством клапанного распределителя с электромагнитным управлением. Например, цилиндр 14, в качестве альтернативы, может включать в себя впускной клапан, управляемый посредством приведения в действие клапанного распределителя с электромагнитным управлением, и выпускной клапан, управляемый через кулачковый привод, включающий в себя системы CPS и/или VCT. В кроме того еще других вариантах осуществления, впускной и выпускной клапаны могут управляться системой золотникового привода или распределителя либо системой привода или распределителя с переменной установкой фаз клапанного распределения. Установка фаз кулачкового распределения может регулироваться (посредством осуществления опережения или запаздывания системы VCT) на основании контрольных точек скорости вращения/нагрузки, определенных в соответствии с гибридным способом, описанным в материалах настоящего описания.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может включать в себя свечу 192 зажигания для инициирования сгорания. Система 190 зажигания может выдавать искру зажигания в камеру 14 сгорания через свечу 192 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12, в выбранных рабочих режимах.
В некоторых вариантах осуществления, каждый цилиндр двигателя 10 может быть сконфигурирован одной или более форсунок для подачи топлива. В качестве неограничивающего примера, показан цилиндр 14, включающий в себя одну топливную форсунку 166. Топливная форсунка 166 показана присоединенной непосредственно к цилиндру 14 для впрыска топлива непосредственно в него пропорционально ширине импульса сигнала FRW, принятого из контроллера 12 через электронный формирователь 169. Таким образом, топливная форсунка 166 обеспечивает то, что известно как непосредственный впрыск (в дальнейшем, также указываемый ссылкой как «DI») топлива в цилиндр 14 сгорания. Несмотря на то, что фиг.1 показывает форсунку 166 в качестве боковой форсунки, она также может быть расположена выше поршня, к примеру, возле положения свечи 192 зажигания. Такое положение может улучшать смешивание и сгорание при работе двигателя на спиртосодержащем топливе вследствие низкой летучести некоторых спиртосодержащих видов топлива. Топливо может подаваться в топливную форсунку 166 из топливной системы 8 высокого давления, включающей в себя топливные баки, топливные насосы и направляющую-распределитель для топлива. Топливные баки в топливной системе 8 могут содержать в себе топливо.
Как описано выше, фиг. 1 показывает только один цилиндр многоцилиндрового двигателя. По существу, каждый цилиндр, подобным образом, может включать в себя свой собственный множеств впускных/выпускных клапанов, топливной форсунки(ок), свечи зажигания, и т.д.
Несмотря на то, что не показано, будет приниматься во внимание, что двигатель дополнительно может включать в себя один или более каналов рециркуляции выхлопных газов для отведения по меньшей мере части выхлопных газов с выпуска двигателя на впуск двигателя. По существу, посредством рециркуляции некоторого количества выхлопных газов, может находиться под влиянием разбавление для двигателя, которое может улучшать рабочие характеристики двигателя, снижая детонацию в двигателе, пиковые температуры и давления сгорания в цилиндре, потери дросселирования и выбросы NOx. Один или более каналов EGR могут включать в себя канал LP-EGR, присоединенный между впуском двигателя выше по потоку от компрессора турбонагнетателя и выпуском двигателя ниже по потоку от турбины, и сконфигурированы для обеспечения EGR низкого давления (LP). Один или более каналов EGR, кроме того, могут включать в себя канал HP-EGR, присоединенный между впуском двигателя ниже по потоку от компрессора и выпуском двигателя выше по потоку от турбины, и сконфигурирован для обеспечения EGR высокого давления (HP). В одном из примеров, поток HP-EGR может выдаваться в условиях, таких как отсутствие наддува, выдаваемого турбонагнетателем, наряду с тем, что поток LP-EGR может выдаваться во время условий, таких как при наличии наддува турбонагнетателя, и/или когда температура выхлопных газов находится выше порогового значения. Поток LP-EGR через канал LP-EGR может регулироваться посредством клапана LP-EGR наряду с тем, что поток HP-EGR через канал HP-EGR может регулироваться посредством клапана HP-EGR (не показан).
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 106, порты 108 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 110 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 112, энергонезависимую память 114 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 122 массового расхода воздуха; температуру хладагента двигателя (ECT) с датчика 116 температуры, присоединенного к патрубку 118 охлаждения; сигнал профильного считывания зажигания (PIP) с датчика 120 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 140; положение дросселя (TP) с датчика положения дросселя; и сигнал абсолютного давления в коллекторе (MAP) с датчика 124. Сигнал скорости вращения двигателя, КРМ, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе. Кроме того, другие датчики могут включать в себя датчики уровня топлива и датчики состава топлива, присоединенные к топливному баку(ам) топливной системы.
Постоянное запоминающее устройство 110 запоминающего носителя может быть запрограммировано машиночитаемыми данными, хранимыми в памяти и представляющими команды, исполняемые процессором 106 для выполнения способов, описанных в материалах настоящего описания, а также вариантов, которые предвосхищены, но специально не перечислены.
Далее, с обращением к фиг. 2, изображен примерный способ 200 управления для определения регулировок исполнительных механизмов или двигателя в граничных условиях. Более точно, регулировки исполнительных механизмов изучаются, когда двигатель в транспортном средстве работает в граничных условиях на регулировочной характеристике скорости вращения-нагрузки. Кроме того, регулировки двигателя могут регулироваться на основании считанных значений, таких как скорость вращения и нагрузка двигателя. Несмотря на то, что скорость вращения и нагрузка двигателя используются в этом примере, другие параметры могут использоваться и индексироваться скоростью вращения двигателя, такие как поток воздуха, заряд воздуха, крутящий момент двигателя, и т.д. В одном из примеров, процесс определения и адаптации может происходить во время начальной работы двигателя после производства транспортного средства. Перед определением регулировок исполнительных механизмов, которые дают требуемые выходные мощности в действующих условиях движения по дороге, транспортное средство (и двигатель) могут быть предварительно запрограммированы начальными регулировками исполнительных механизмов. В еще одном примере, двигатель может быть работающим в посленачальных условиях работы. В материалах настоящего описания, регулировки исполнительных механизмов могут определяться и адаптироваться для приспосабливания к износу деталей двигателя, который может оказывать влияние на рабочие параметры.
На этапе 202, способ включает в себя оценку и/или измерение условий работы двигателя. Таковые, например, могут включать в себя требование крутящего момента, температуру каталитического нейтрализатора, температуру двигателя, топливно-воздушное соотношение выхлопных газов, MAP, MAP, установку момента зажигания, и т.д. На этапе 204, могут определяться текущие рабочие параметры двигателя, в особенности, скорость вращения двигателя и нагрузка двигателя, при которых двигатель является работающим на данный момент. На этапе 206, может определяться, включают ли в себя текущие скорость вращения двигателя и нагрузка двигателя граничные условия на регулировочной характеристике скорости вращения-нагрузки. Например, граничные условия могут содержать одно из минимальной скорости вращения при любой нагрузке двигателя, минимальной нагрузки при любой скорости вращения двигателя, максимальной скорости вращения при любой нагрузке двигателя и максимальной нагрузки при любой скорости вращения двигателя, или минимального BSFC. В качестве примера, граничное состояние может включать в себя работу двигателя на минимальной скорости вращения двигателя, таком как 500 оборотов в минуту. В еще одном примере, скорость вращения двигателя может находиться на предельно допустимой скорости вращения или максимальной скорости вращения, таком как 6000 оборотов в минуту.
Если, на этапе 206, граничное состояние не определено, способ 200 переходит на этап 207. На этапе 207, контроллер может выполнять способ 300 по фиг. 3, чтобы определять регулировки двигателя для условий двигателя, не включающих в себя граничные условия на регулировочной характеристике скорости вращения-нагрузки. Способ 300 будет дополнительно описана со ссылкой на фиг. 3. Если, на этапе 206, подтверждено, что текущая работа двигателя происходит в граничном состоянии, способ 200 переходит на этап 208 для определения текущих регулировок исполнительных механизмов или двигателя. Регулировки исполнительных механизмов могут включать в себя положение дросселя, установку момента зажигания, установки фаз клапанного распределения, положение клапана EGR, положение перепускной заслонки для выхлопных газов. Затем, на этапе 210, определенные регулировки исполнительных механизмов могут быть адаптированы, чтобы давать требуемые выходные мощности. В одном из примеров, адаптивное определение может достигаться посредством определения действующей экономии топлива для данной точки скорости вращения-нагрузки двигателя и адаптивной регулировки регулировок в этой точке скорости вращения-нагрузки, чтобы доводить до максимума экономию топлива и снижать BSFC. В еще одном примере, регулировки исполнительных механизмов могут адаптивно регулироваться для снижения выбросов. В еще одном другом примере, может определяться крутящий момент двигателя, и регулировки двигателя могут регулироваться, чтобы давать улучшенный средний момент торможения (MBT).
На этапе 212, способ 200 включает в себя формирование справочной таблицы динамических узлов (DLUT) на основании адаптивно определенных регулировок исполнительных механизмов из 210. Адаптивно определенные значения в граничных условиях могут применяться к модели двигателя для интерполяции на другие точки скорости вращения-нагрузки между граничными условиями, в которых адаптивное определение еще не произошло или не будет происходить. В одном из примеров, DLUT может формироваться посредством множества линейных моделей. Соответственно, на этапе 214, модель двигателя используется для интерполяции по адаптивно определенным регулировкам исполнительных механизмов, а на этапе 216, регулировки исполнительных механизмов для неграничных условий могут формироваться из модели двигателя. На этапе 218, способ 200 включает в себя обновление и сохранение этих регулировок в памяти контроллера. Способ 200 затем заканчивается.
Таким образом, DLUT может формироваться параллельно с определением и адаптацией регулировок исполнительных механизмов в граничных условиях скорости вращения-нагрузки. Посредством использования модели интерполяции для определения регулировок исполнительных механизмов для неграничных условий, каждая точка скорости вращения-нагрузки на регулировочной характеристике может не инспектироваться для сбора данных. Следовательно, длительный процесс сбора данных может сокращаться, давая возможность снижения затрат на производство. Посредством управления регулировками двигателя, такими как установка момента зажигания, установка фаз клапанного распределения и/или положение дросселя в зависимости от по меньшей мере скорости вращения и/или нагрузки двигателя, может достигаться требуемая выходная мощность. Для данной точки скорости вращения-нагрузки, в которой адаптивное определение не выполнялось явным образом, регулировки исполнительных механизмов могут быть предусмотрены посредством справочной таблицы динамических узлов (которая дополнительно описана ниже), где справочная таблица динамических узлов основана на адаптивно определенных данных во время предыдущей работы двигателя в другой точке скорости вращения-нагрузки. Например, другая точка скорости вращения-нагрузки может быть граничным состоянием (например, минимальным скоростью вращения, минимальной нагрузкой, максимальным скоростью вращения и/или максимальной нагрузкой). В одном из примерных режимов работы, адаптивное определение может достигаться посредством определения действующей экономии топлива для данной точки скорости вращения-нагрузки и адаптивной регулировки регулировок в этой точке скорости вращения-нагрузки для максимизации экономии топлива.
Следует принимать во внимание, что, несмотря на то, что вышеприведенный примерный способ включает в себя определение регулировок исполнительных механизмов, только когда граничные условия случайно возникают во время нормальной работы двигателя, двигателю в транспортном средстве с гибридным приводом может быть дана команда контроллером проинспектировать граничные точки на регулировочной характеристике скорости вращения-нагрузки, чтобы давать возможность адаптивного определения.
Также следует принимать во внимание, что, несмотря на то, что вышеприведенный примерный способ описывает формирование DLUT из интерполяционных точек между граничными условиями, другие примеры могут включать в себя экстраполяцию данных. Например, граничные условия могут экстраполироваться в неграничные условия. Впредь, интерполяция данных может использоваться взаимозаменяемо с экстраполяцией данных в настоящем раскрытии.
Фиг. 3 изображает примерный способ 300 для использования DLUT, сформированной в способе 200 в условиях работы двигателя, которые находятся на отдалении от границ регулировочной характеристики скорости вращения-нагрузки двигателя. Более точно, регулировки исполнительных механизмов для комбинаций скорости вращения-нагрузки двигателя вдали от границы регулировочной характеристики скорости вращения-нагрузки могут выбираться из DLUT, чтобы обеспечивать требуемые выходные мощности, такие как пониженный BSFC, совместимые выбросы, и т.д.
На этапе 302, способ 300 может подтверждать, являются ли нагрузка и скорость вращения двигателя (например, определенные на этапе 204) неграничными условиями на регулировочной характеристике скорости вращения-нагрузки двигателя. Например, неграничные условия могут включать в себя любые скорости вращения и нагрузки, иные чем скорости вращения и нагрузки на границах регулировочной характеристики скорости вращения-нагрузки, например, минимальное скорость вращения, минимальная нагрузка, максимальное скорость вращения и/или максимальная нагрузка. Если текущие условия работы не являются граничными условиями, способ может заканчиваться. Иначе, способ 300 переходит на этап 304, чтобы определять, готова ли DLUT для справки. В одном из примеров, достаточная начальная работа двигателя могла происходить в граничных условиях для формирования регулировок исполнительных механизмов для условий двигателя в пределах границ скорости вращения-нагрузки вDLUT. В еще одном примере, двигатель может находиться в начальной работе, при которой граничные условия могли не испытываться, чтобы формировать регулировки исполнительных механизмов по адаптивно определенным данным. Соответственно, если DLUT не готова, чтобы подвергаться справке, способ 300 переходит на этап 306 для продолжения работы двигателя с предварительно запрограммированными регулировками исполнительных механизмов. Иначе, на этапе 308, DLUT может подвергаться обращению для установления регулировок двигателя при определенных скорости вращения и/или нагрузке двигателя. Регулировки исполнительных механизмов для определенных скорости вращения и/или нагрузки двигателя могут быть регулировками, которые дают требуемые результаты, такие как пониженный BSFC, улучшенный крутящий момент, и т.д. На этапе 310, определенные регулировки исполнительных механизмов могут применяться, чтобы давать возможность улучшенной работы двигателя.
Таким образом, DLUT может формировать одну или более регулировок двигателя на основании адаптивно определенных регулировок для тех же самых параметров в других условиях скорости вращения и нагрузки двигателя, отличных от определенных скорости вращения двигателя и нагрузки двигателя. Другие условия скорости вращения двигателя и нагрузки двигателя могут быть граничными условиями скорости вращения-нагрузки на границе справочной таблицы или на границе рабочей регулировочной характеристики скорости вращения-нагрузки в контроллере транспортного средства. Поэтому, во время первого рабочего состояния, когда двигатель работает в граничной точке регулировочной характеристики скорости вращения-нагрузки, регулировки могут адаптивно обновляться в справочной таблице. Затем, во время второго, более позднего рабочего состояния, удаленного от всех граничных точек, регулировки, выведенные из справочной таблицы в точке скорости вращения-нагрузки неграничного состояния, могут быть основаны не только на данных, хранимых в справочной таблице для такой точки скорости вращения-нагрузки, но также на адаптивно обновленных данных, сохраненных в граничной точке скорости вращения-нагрузки, и модели двигателя. Модель двигателя может быть динамической моделью двигателя.
Таким образом, подход с DLUT может давать улучшенные регулировки исполнительных механизмов, как только в действительности встречаются неграничные точки скорости вращения-нагрузки, не требуя обязательного адаптивного определения в неграничных точках скорости вращения-нагрузки. Поэтому, сокращаются сложные и дорогостоящие процессы построения регулировочной характеристики двигателя.
Таким образом, способ двигателя может содержать определение первого множества регулировок двигателя в граничных условиях регулировочной характеристики скорости вращения-нагрузки; формирование справочной таблицы динамических узлов (DLUT) на основании определенных регулировок, и определение второго множества регулировок двигателя для работы в неграничных условиях регулировочной характеристики скорости вращения-нагрузки по DLUT. Здесь, граничные условия регулировочной характеристики скорости вращения-нагрузки двигателя могут включать в себя одно из минимальной скорости вращения при любой нагрузке двигателя, максимальной скорости вращения при любой нагрузке двигателя, минимальной нагрузки при любой скорости вращения двигателя и максимальной нагрузки при любой скорости вращения двигателя или BSFC. Граничные условия могут давать разреженную выборку регулировочной характеристики скорости вращения-нагрузки. Кроме того, неграничные условия скорости вращения-нагрузки могут в себя все условия скорости вращения-нагрузки, иные чем граничные условия регулировочной характеристики скорости вращения-нагрузки двигателя.
Чтобы проиллюстрировать вариант осуществления настоящего раскрытия, задача опосредованного адаптивного управления сформулирована ниже. Также представлены способы оценки параметров и обращения модели для реализации адаптивного управления. Адаптивное управление применяется к нелинейной модели безнаддувного двигателя, чтобы продемонстрировать действительность алгоритма, используемого при адаптивном управлении. Алгоритм в адаптивном управлении отслеживает требуемый целевой выходной сигнал (например, нагрузку двигателя, CA50) и оптимизирует BSFC в граничных точках скорости вращения-нагрузки двигателя. Кроме того, ниже представлена структура модели DLUT, которая использует множество линейных моделей, центрированных различными точками скорости вращения-нагрузки, такими как граничные точки скорости вращения-нагрузки, для моделирования поведения двигателя. Дополнительно, регулировки двигателя установившегося состояния для точек скорости вращения-нагрузки, не определенных явно адаптивным управлением, могут извлекаться из динамических данных, определенных в точках скорости вращения-нагрузки в граничных условиях.
Далее, с обращением к фиг. 4, она показывает примерную модель 400 опосредованного адаптивного управления для реализации адаптивного управления и определения выходного сигнала y(k). Модель 400 адаптивного управления может быть примерной архитектурой инфраструктуры инкрементального адаптивного управления с упреждением по модели. Здесь, требуемый выходной сигнал y∗(k+r) может подаваться в блок 402 оценки обращения модели, который регулирует входной сигнал u(k), который подается на объект 404 управления, r(∗). Объект 404 управления, r(∗), может вырабатывать выходной сигнал y(k). Возмущения входных сигналов между текущим входным сигналом и предыдущим входным сигналом могут определяться в первом компараторе 410 в качестве входного возмущения δu(k). Информация о предыдущем входном сигнале u(k-1) может формироваться в блоке 408. Подобным образом, информация о предыдущем выходном сигнале y(k-1) может определяться в блоке 412 и сравниваться с текущим выходным сигналом y(k) на втором компараторе 414, чтобы определять выходное возмущение δy(k). Каждое из входного возмущения δu(k) и выходного возмущения δy(k) могут подаваться в оценку 406 модели. По существу, оценка 406 модели может использовать эти возмущения для передачи регулировки, основанной на обратной связи, в блок 402 оценки обращения модели.
Дополнительные подробности о модели адаптивного управления будут дополнительно прояснены ниже в примерной постановке задачи адаптивного управления, примерной оценке модели и примерном обращении модели.
Формулировка задачи адаптивного управления может быть описана, как изложено ниже. Сначала может быть рассмотрена нелинейная система:

где n - порядок системы, r≤n - относительная степень,




Затем, могут быть рассмотрены небольшие возмущения около рабочей точки u(k), y(k):


так что небольшие возмущения могут быть записаны как:

где


Цель настоящей полезной модели состоит в том, чтобы определять входной сигнал u∗(k-r) идеального управления, которое может давать идеальные выходные сигналы



где


Для решения относительно входных сигналов идеального управления, могут использоваться известные требуемые выходные сигналы y∗(k) наряду с оценкой






где

Затем, изображена оценка модели, использующая обновление рекурсивного метода наименьших квадратов. Чтобы оценивать параметры модели, уравнение (4), приведенное выше, может быть записано, как изложено ниже:

где

Затем, модель может рекурсивно обновляться согласно:

где

а P(k) может обновляться согласно


Здесь, P(0) может быть инициализировано в качестве P(0)=(β1I, где β1>0.
Затем, вышеприведенная модель может быть обращена с использованием ограниченного равенствами квадратичного программирования. Перед попыткой решить задачу обращения модели, выходные сигналы могут быть разделены на две группы: с явными целевыми значениями и те, которые должны быть минимизированы. Более точно, δy1,w(k) могут быть составляющими δy(k) с явными целевыми значениями, где w≤ly, а






Уравнение (20) является уравнением (11), распространенным на г шагов в будущее. Если Θ(k)-Θ(k-1) предполагается малым, уравнение (20) может быть переписано в качестве:

Кроме того,


которое может быть подчинено

где,



где ρ∈(0,1], - целевое значение, отслеживающее границу допуска. Уравнение (21) может быть подставлено в уравнение (22), чтобы давать

где



Затем, если A†(k) предполагается обобщенным обращением A(k), то

может быть неограниченным минимизатором уравнения (22). Поэтому, ограниченное решение уравнения (22) при условии уравнения (23) может быть найдено решением линейной системы:

где,


Матрица R(k) может быть выбрана с использованием алгоритма:
Пусть

Этап 1: Рассчитать уравнение (26)
Этап 2: Для i=1, …, 2(lu+w), если xi(k)>D(k)i, то Ri,i(k)=1,
Этап 3: Рассчитать уравнение (28)
Этап 4: Для i=1, …, lu,
если

если

Чтобы продемонстрировать вышеприведенное адаптивное управление, в одном из примеров может использоваться модель безнаддувного двигателя. В материалах настоящего описания, двигатель может содержать исполнительные механизмы, такие как дроссель, искровое зажигание, кулачок для впускных клапанов и кулачки для выпускных клапанов, так что входными сигналами исполнительных механизмов могут быть положение дросселя, установка момента зажигания, установка фаз распределения кулачков для впускных клапанов и установка фаз распределения кулачков для выпускных клапанов. Кроме того, нагрузка двигателя, CA50 и BSFC могут быть выходными мощностями двигателя. Фиг. 5 иллюстрирует многомерную характеристику 500, изображающую изменения положения дросселя, установки момента зажигания, установки фаз распределения кулачков для впускных клапанов и установку фаз распределения кулачков для выпускных клапанов для указания командой трех отдельных точек нагрузки двигателя 0,8, 0,5 и 0,2 бар, каждая на скорости вращения двигателя в 700 оборотов в минуту. Таким образом, граничные точки нагрузки 0,8, 0,5 и 0,2 бар могут инспектироваться во время минимальной скорости вращения двигателя в 700 оборотов в минуту. Эти точки нагрузки могут указываться командой наряду с поддержанием CA50 в 9,07 и понижением BSFC. Фиг. 6, 7 и 8 изображают три выходных сигнала в качестве сформированных изменениями входными сигналами исполнительных механизмов по фиг. 5.
Как можно видеть на фиг. 5, многомерная характеристика 500 изображает собранные данные на оси x наряду с установкой фаз распределения кулачков для выпускных клапанов на графике 502, установкой фаз распределения кулачков для впускных клапанов на графике 504, установкой момента зажигания на графике 506 и положением дросселя на графике 508. Между тем, фиг. 6 изображает многомерную характеристику 600, показывающую собранные данные по оси x и нагрузку двигателя по оси y. Многомерная характеристика 600 включает в себя график 606 (пунктирная линия) для целевой нагрузки, графики 604 и 608, показывающие границы ошибок, и график 602, изображающий изменения нагрузки в зависимости от изменений регулировок исполнительных механизмов. Как можно видеть, целевые командные нагрузки имеют значения 0,8, 0,5 и 0,2 (график 606), и, по мере того, как меняются регулировки исполнительных механизмов, действующая нагрузка (график 602) сопровождает и в итоге достигает целевой нагрузки в пределах границ ошибок.
Например, между измерительными точками 0 и 200, дроссель повышается на многомерной характеристике 500 (график 508), чтобы усиливать поток воздуха и давать возможность относительно более высокой нагрузки двигателя 0,8 (график 602). Одновременно, установка фаз распределения кулачков для впускных клапанов (график 504) может подвергаться запаздыванию, а установка фаз распределения кулачков для выпускных клапанов может подвергаться опережению (график 502). Посредством регулировки установок фаз кулачкового распределения, как показано, перекрытие клапанов может уменьшаться, предоставляя достаточному крутящему моменту возможность вырабатываться на более низких скоростях вращения двигателя (например, 700 оборотов в минуту). Соответственно, посредством адаптивной модификации регулировок исполнительных механизмов, требуемая нагрузка двигателя 0,8 может достигаться наряду с одновременной минимизацией BSFC.
Между измерительными точками 200 и приблизительно 350, дроссель может понижаться (график 508 на многомерной характеристике 500), и запаздывание искрового зажигания может одновременно применяться (график 506 многомерной характеристики 500) для снижения крутящего момента для более низкой целевой нагрузки двигателя 0,5. Установка фаз распределения кулачков для выпускных клапанов (график 502) также может подвергаться запаздыванию между измерительными точками 200 до приблизительно 400 наряду с тем, что установка фаз распределения кулачков для впускных клапанов подвергается опережению (график 506). В ответ на эти модификации регулировок исполнительных механизмов, нагрузка двигателя падает с 0,8 до 0,5 (график 602 на многомерной характеристике 600) между измерительными точками 200 до приблизительно 350 на фиг. 6. Затем, до измерительной точки 400, целевая нагрузка двигателя 0,2 может достигаться посредством применения запаздывания зажигания и снижения крутящего момента приблизительно в измерительной точке 370 (график 506). Кроме того, дроссель может удерживаться на своей более низкой регулировке, чтобы уменьшать поток воздуха, и могут поддерживаться регулировки для установок фаз распределения кулачков для выпускных и впускных клапанов, выполненные приблизительно в измерительных точках 275. Фиг. 7 показывает многомерную характеристику 700, иллюстрирующую собранные данные по оси x с CA50 вдоль оси y. Регулировки исполнительных механизмов могут регулироваться, чтобы давать требуемый коэффициент сгорания, например, CA50 в 9,07, как показано на многомерной характеристике 700. График 708 изображает изменение действующего CA50 по мере того, как меняются регулировки исполнительных механизмов, на фиг. 5, график 706 является целевым значением CA50 (9,07), а графики 702 и 704 изображают границы ошибок на многомерной характеристике 700. Как может наблюдаться по многомерной характеристике 700, действующий CA50 достигает требуемого целевого CA50 в 9,07 около измерительной точки 500.
Фиг. 8 изображает многомерную характеристику 800, показывающую собранные данные по оси x наряду с BSFC, графически изображенным по оси у. Подобно многомерной характеристике 700 по фиг. 7, многомерная характеристика 800 показывает изменения BSFC (график 802) по мере того, как регулируются регулировки исполнительных механизмов, на фиг. 5, чтобы давать пониженный BSFC на каждой регулировке нагрузки. Как можно видеть, адаптивное управление может быть способным находить оптимальный маршрут в пространстве исполнительных механизмов для выполнения целей команды. Также следует принимать во внимание, что вышеприведенный процесс является автономным. Другими словами, может не привлекаться никакого взаимодействия человека с двигателем, и явная логика может не использоваться для выбора регулировок исполнительных механизмов. Алгоритм изучает нагрузку, CA50, BSFC и другие ограничения в ответ на изменения исполнительных механизмов и использует эту информацию для схождения к требуемым регулировкам. Кроме того, исполнительные механизмы могут перемещаться одновременно от одного этапа к другому, чтобы одновременно удовлетворять всем целевым значениям/ограничениям. Дополнительно, управление может не быть последовательным, и один исполнительный механизм может управляться данный момент времени для достижения одного ограничения/целевого значения в данный момент времени.
Данные, собранные в переходных условиях для регулировок исполнительных механизмов по требуемым выходным сигналам двигателя, таким как коэффициент сгорания и эффективность использования топлива (например, BSFC), позже могут использоваться для получения информации об установившемся состоянии. Затем, входные-выходные данные из адаптивного управления могут использоваться в замкнутом контуре с двигателем, чтобы идентифицировать независящую от времени справочную таблицу динамических узлов (DLUT). В первом примере, DLUT может быть множеством линейных моделей, в котором выходной сигнал системы является суммой выходных сигналов всех моделей в ответ на взвешенные входные сигналы. Во втором примере, DLUT может быть множеством линейных моделей, в котором выходной сигнал системы является суммой взвешенных выходных сигналов в ответ на взвешенные входные сигналы или суммой взвешенных выходных сигналов в ответ на входной сигнал. Первая примерная модель может использоваться в материалах настоящего описания для вычисления характеристик установившегося состояния двигателя для точек скорости вращения-нагрузки, не определенных явным образом ранее посредством адаптивного управления. В следующем примере, как будет описано позже, могут определяться регулировки исполнительных механизмов для точек нагрузки, иных чем 0,8, 0,5 и 0,2. В еще одном примере (не показанном), могут инспектироваться точки скорости вращения двигателя, иные чем 700 оборотов в минуту.
В одном из примеров, pый порядок (DLUT) с узлами


где, для i=1, …, p,


где

и

Матрица траектории LUT может выбираться, чтобы быть расстоянием между текущим местоположением ν(k) в LUT и каждым из узлов γi, для i=1, …, p. Меры расстояния могут быть выбраны так, чтобы Гi(k,ν(k),γi(k)) была несингулярной. Более точно, несингулярность может включать в себя ситуацию, где каждый из узлов в LUT оказывает влияние на выходной сигнал y(k) для всех ν(k). Более того, меры расстояния могут быть выбраны, чтобы узлы, ближайшие к ν(k), имели оказывали большее влияние на y(k), чем узлы, находящиеся дальше:

где, для i=1, …, p, σi является положительным, и 0<Гi(k,ν(k),γi(k))≤1 для всех k.
Устойчивость DLUT формы, показанной уравнением (30) наряду с допущениями ограниченности на матрицах траектории LUT, может следовать из теории линейных систем. Например, обстоятельство 7.1 может предполагать, что ||u(k)||<δ для всех k, где δ∈[0,∞),






Поскольку



для всех k. Поэтому, из линейной теории может следовать, что, поскольку U(k) ограничена, если

Затем, могут быть идентифицированы параметры узлов LUT. Рассмотрим уравнение (29), переписанное в качестве:


и для j=0, …, n,


Ω может обновляться с использованием обновления рекурсивным методом наименьших квадратов, как изложено ниже:

где


Ξ(k) может быть инициализировано в качестве Ξ(k)=β2I, где β2>0.
Числовой пример проиллюстрирован ниже на основании входных и выходных данных, сформированных раньше посредством адаптивного управления. Нагрузка двигателя может выбираться в качестве метки DLUT, например, ν(k)=y1(k), и узлы могут быть центрированы по γ=[0,2 0,3 0,4 0,5 0,6 0,7 0,8]. Кроме того, порядок модели может иметь значение n=5, и β2=0,1.
Фиг. 9 показывает многомерную характеристику 900, которая иллюстрирует сравнение между действующими выходными сигналами двигателя и оцененными выходными сигналами двигателя согласно модели DLUT. Многомерная характеристика 900 изображает действующую нагрузку двигателя на графике 902, спрогнозированную оценку нагрузку двигателя на графике 904, ошибку между действующей нагрузкой и оценкой нагрузки на графике 906, действующий CA50 на графике 908, спрогнозированную оценку CA50 на графике 910, ошибку между действующим CA50 и спрогнозированным CA50 на графике 912, действующий BSFC на графике 914, спрогнозированный BSFC на графике 916 и ошибку между действующим BSFC и спрогнозированным BSFC на графике 918. Все вышеприведенные графики изображены в отношении номера измерительных точек по оси x. Графики на фиг. 9 основаны на данных, собранных посредством адаптивного управления, описанного со ссылкой на фиг. 4-8. Как можно видеть, ошибка между действующей нагрузкой и спрогнозированной моделью нагрузкой, действующим CA50 и спрогнозированным моделью CA50, и действующим BSFC и спрогнозированным моделью BSFC является относительно низкой, и большую часть времени находится около значения ноль. Таким образом, модель может хорошо отслеживать реальную динамику двигателя. Однако, в точке 400 данных для BSFC, пик действующего ВЗГС может соответствовать особой точке в модели безнаддувного двигателя, которая не зафиксирована в DLUT.
Поскольку модель способна к отслеживанию реальной динамики двигателя надлежащим образом, регулировки двигателя установившегося состояния могут извлекаться из DLUT посредством рассмотрения входного сигнала u(k)=uSS и Г=ГSS установившегося состояния для k>0, которые могут создавать выходной сигнал y(k)=yss установившегося состояния для k>0. Зависимость между входными сигналами и выходными сигналами установившегося состояния может быть вычислена из уравнения (29), как изложено ниже

тогда, при условии, что ly≥lu,

где † может быть псевдоинверсией, а оценка



тогда

Модель ΩSS установившегося состояния может использоваться для вычисления регулировок исполнительных механизмов установившегося состояния для точек скорости вращения-нагрузки вдали от граничных точек. Более точно, во время адаптивного управления, регулировки исполнительных механизмов могут определяться и адаптироваться на отдельных нагрузках двигателя, которые могут возникать на границе. В примере, описанном раньше, инспектировались три нагрузки, 0,8, 9,5 и 0,2, двигателя на минимальной скорости вращения 700 оборотов в минуту, и регулировки исполнительных механизмов, такие как дроссель, установка момента зажигания, установка фаз распределения кулачков для впускных клапанов и установка фаз распределения кулачков для выпускных клапанов, изучались и адаптировались, чтобы давать выходные сигналы, в том числе CA50 и требуемый BSFC. Регулировки исполнительных механизмов могут регулироваться, чтобы обеспечивать пониженный BSFC, а потому, улучшенную экономию топлива. На основании данных, собранных на этих специфичных нагрузках двигателя, DLUT может идентифицироваться посредством интерполяции по точкам и использоваться для вычисления регулировок исполнительных механизмов установившегося состояния для точек нагрузки, отличных от определенных ранее. Таким образом, регулировки исполнительных механизмов для точек нагрузки, иных, чем 0,8, 0,5 и 0,2, могут извлекаться из DLUT. Соответственно, регулировки исполнительных механизмов для обеспечения нагрузок двигателя 0,7, 0,6, 0,4 и 0,3, могут извлекаться из DLUT посредством использования модели установившегося состояния ΩSS. Входной сигнал uSS установившегося состояния может вычисляться при условии удовлетворения требуемым целевым значениям (например, CA50, нагрузке, и т.д) в пределах 7% наряду с уменьшением, например, минимизацией BSFC.

В Таблице 1, приведенной выше, uSS изображено для граничных точек, не определенных явным образом ранее. Здесь, uSS может оцениваться с использованием ΩSS. Кроме того, определенные входные данные были проверены на модели безнаддувного двигателя, использованного ранее для оценки точности модели DLUT. Результаты сведены в таблицу ниже в таблице 2.

Таблица 2 показывает оцененную нагрузку, оцененный CA50 и оцененный BSFC для вычисленных регулировок исполнительных механизмов установившегося состояния, определенных по DLUT. Таблица 2 также показывает действующую нагрузку и действующий CA50, когда определенные регулировки исполнительных механизмов использовались в модели безнаддувного двигателя. Как может наблюдаться, оцененные нагрузка и CA50 относительно близки к действующей нагрузке и действующему CA50 за исключением точки нагрузки 0,3. Должно быть отмечено, что точка нагрузки 0,3 (более точно, 0,32) соответствует особой точке, изображенной на регулировочной характеристике 900 для BSFC (графиков 914, 916, и 918), вследствие которой достоверные результаты не были получены в этой области.

Таблица 3 сравнивает ВЗГС, полученный из регулировок исполнительных механизмов установившегося состояния, определенных на основании DLUT с оптимальными значениями для тех же самых точек скорости вращения-нагрузки. Ошибка между действующим BSFC и оптимальным BSFC относительно низка, особенно на более высоких нагрузках. Таким образом, разработанная модель DLUT может использоваться для определения регулировок исполнительных механизмов, которые обеспечивают требуемую выходную мощность с достаточной точностью.
Как описано раньше, процесс построения регулировочной характеристики двигателя для современных бензиновых двигателей непосредственного впрыска с турбонаддувом (GTDI) стал в большей степени сложным, так как процесс требует исчерпывающего сбора динамометрических данных и последующей обработки. Механизмы, такие как внешняя рециркуляция выхлопных газов (EGR), сдвоенная независимая регулируемая установка фаз клапанного распределения, перепускная заслонка для выхлопных газов, давление в направляющей-распределителе для топлива, начало впуска, и т.д., могут использоваться для изменения параметров двигателя, чтобы улучшать выбросы, расход топлива и/или пиковый крутящий момент. В настоящем раскрытии, способ построения регулировочной характеристики двигателя включает в себя определение точек скорости вращения в зависимости от нагрузки двигателя наряду с изменением параметров систем в поиске улучшенного среднего тормозного момента (MBT) и пониженного удельного расхода топлива при торможении (BSFC). В одном из примерных вариантов осуществления, может применяться гибридный способ, который использует опосредованное адаптивное управление для одновременного удовлетворения целевых значений и оптимизации для экономии топлива. В материалах настоящего описания, может указываться командой всего лишь подмножество всех точек скорости вращения-нагрузки, и данные могут собираться в переходном режиме работы двигателя. Параллельно адаптивному управлению, справочная таблица динамических узлов (DLUT) может идентифицироваться из входных и выходных данных, формируемых адаптивным управлением. Кроме того, DLUT может использоваться, чтобы извлекать регулировки исполнительных механизмов установившегося состояния для всех точек на регулировочной характеристике скорости вращения-нагрузки, которые могут не инспектироваться явным образом посредством адаптивного управления.
Таким образом, методология динамической справочной таблицы (DLUT) гибридного адаптивного управления может применяться для интерактивной оптимизации силовой передачи. Адаптивное управление может не инспектировать явным образом каждую точку скорости вращения-нагрузки двигателя на регулировочной характеристике двигателя или в справочной таблице для определения регулировок исполнительных механизмов для требуемой выходной мощности двигателя. Соответственно, усложненные сбор и последующая обработка данных могут уменьшаться. Посредством создания DLUT параллельно со сбором данных, в то время как двигатель работает в граничных условиях, может сокращаться время, потраченное на стенде или на дороге для сбора данных. В общем и целом, могут быть достигнуты экономии по времени и расходам.
Отметим, что примерные способы управления и оценки, включенные в материалы настоящего описания, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Способы и способы управления, раскрытые в материалах настоящего описания, могут храниться в качестве исполняемых команд в постоянной памяти. Специфичные способы, описанные в материалах настоящего описания, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машиночитаемого запоминающего носителя в системе управления двигателем.
Следует принимать во внимание, что конфигурации и способы, раскрытые в материалах настоящего описания, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящего описания.
Последующая формула полезной модели подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы полезной модели могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы полезной модели включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой полезной модели посредством изменения настоящей формулы полезной модели или представления новой формулы полезной модели в этой или родственной заявке. Такая формула полезной модели, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле полезной модели, также рассматривается в качестве включенной в предмет полезной модели настоящего раскрытия.
Реферат
1. Система управления силовой передачей транспортного средства, содержащая:двигатель;силовую передачу, присоединенную между двигателем и колесами транспортного средства;один или более исполнительных механизмов, выполненных с возможностью изменения выходной мощности силовой передачи; иконтроллер с машиночитаемыми командами, содержащимися в постоянной памяти, для:в первом состоянии,определения первого множества регулировок исполнительных механизмов для требуемой выходной мощности; исоздания справочной таблицы динамических узлов (DLUT) только на основании первого множества регулировок исполнительных механизмов; иво втором состоянии,определения второго множества регулировок исполнительных механизмов только на основании DLUT.2. Система по п. 1, в которой первое условие включает в себя работу двигателя только в граничных условиях на регулировочной характеристике скорости вращения-нагрузки двигателя, причем граничные условия включают в себя одно из минимальной скорости вращения при любой нагрузке двигателя, минимальной нагрузки при любой скорости вращения двигателя, максимальной нагрузки при любой скорости вращения двигателя и максимальной скорости вращения при любой нагрузке двигателя.3. Система по п. 2, в которой второе состояние включает в себя работу двигателя только в неграничных условиях на регулировочной характеристике скорости вращения-нагрузки двигателя.4. Система по п. 3, в которой создание DLUT на основании первого множества регулировок исполнительных механизмов включает в себя использование модели интерполяции для формирования регулировок исполнительных механизмов для неграничных условий
Формула
Комментарии