Автоматизированный способ выявления сердечного сокращения - RU2397694C2
Код документа: RU2397694C2
Чертежи
Описание
Настоящее изобретение касается автоматизированного способа выявления сердечного сокращения, исходя из анализа выявленной кривой давления, который легко реализуем, недорог и высоко надежен, способ является пригодным для его итеративного повторения на последующих участках сигнала давления.
Настоящее изобретение дополнительно касается инструментария, необходимого для выполнения автоматизированного способа, и устройства, его выполняющего.
Известно, что оценивание биологических сигналов играет главную роль в диагностике и клинике.
В частности, несколько автоматизированных способов для оценивания выявленной кривой кровяного давления были разработаны в последние годы, и они были реализованы в соответствующем оборудовании.
Тем не менее, такие способы и имеющее к ним отношение оборудование имеют некоторые недостатки.
Во-первых, они не адаптируются ко всем возможным условиям выявления, которые изменяются в зависимости от пациента, от возможного наличия паталогий и от ситуации измерения. В качестве примера, такое оборудование не распознает сигнал электрокардиограммы, полученный во время хирургической операции на сердце.
Более того, чем более оно надежно, тем оно более сложное и, следовательно, дорогое.
Поэтому, целью настоящего изобретения является создание автоматизированного способа для выявления сердечного сокращения, исходя из анализа выявленной кривой давления, который легко реализуем, недорог и высоконадежен.
Кроме того, целью настоящего изобретения является предоставить инструментарий, необходимый для выполнения автоматизированного способа, и устройство, его выполняющее.
Особым объектом настоящего изобретения является автоматизированный способ для выявления сердечного сокращения на основе дискретизированного сигнала кровяного давления, имеющего начальную точку Pstart, отличающийся тем, что работает в соответствии с конечным автоматом, содержащим:
А. первое состояние (1), в котором способ отыскивает:
- абсолютное минимальное значение Pmin давления посредством просмотра значений давления, заключенных в пределах первого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на первое временное пороговое значение DTMIN_SYS,
- абсолютное максимальное значение Pmax давления посредством просмотра значений давления, заключенных в пределах второго интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS, и
- максимальное значение Y1max_postdia первой производной сигнала давления, заключенное в пределах третьего временного порогового значения, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
способ принимает точку Pmin в качестве диастолической точки Pdia и точку Pmax в качестве систолической точки Psys и переходит в следующее второе состояние (2);
В. второе состояние (2), в котором способ отыскивает точку Pinflection перегиба сигнала давления, следующую за систолической точкой Psys в пятом интервале времени, не выходящем за пределы интервала, начинающегося от систолической точки Psys и с длительностью, равной третьему временному пороговому значению DTMAX_MINY1_SYS, способ затем переходит в следующее третье состояние (3);
С. третье состояние (3), в котором способ проверяет, в шестом интервале времени, не выходящем за пределы интервала, начинающегося от точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, представляет ли сигнал давления вершину кривой с направленной вниз вогнутостью, так что:
- если результат проверки является положительным, способ отыскивает в седьмом интервале времени, не выходящем за пределы интервала, начинающегося от точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, первый относительный минимум кривой давления, и он принимает последний в качестве дикротической точки Pdic, тогда как
- если результат проверки является отрицательным, способ отыскивает в упомянутом седьмом интервале времени момент времени, в который вторая производная сигнала давления принимает максимальное значение Y2max_postinflection, и он принимает соответствующую точку сигнала давления в качестве дикротической точки Pdic,
затем способ переходит в следующее четвертое состояние (4);
D. четвертое состояние (4), в котором способ отыскивает максимальное значение Y1max_postdic первой производной сигнала давления в восьмом интервале, не выходящем за пределы интервала, начинающегося от дикротической точки Pdic и с длительностью, равной пятому временному пороговому значению DPOSTDIC, способ проверяет, что максимальное значение Y1max_postdia, определенное в первом состоянии (1), является не меньшим, чем значение Y1max_postdiс, так что:
- если результат проверки является отрицательным, способ возвращается в первое состояние (1), принимая в качестве новой начальной точки Pstart точку, следующую за диастолической точкой Pdia и не следующую за дикротической точкой Pdic, тогда как
- если результат проверки является положительным, способ переходит в конечное состояние (7); и
E. конечное состояние (7), в котором способ способен выдавать диастолическую точку Pdia, систолическую точку Psys и дикротическую точку Pdic.
Более того, согласно изобретению в первом состоянии способ может также отыскивать:
- максимальное значение Y2max_diatosys второй производной сигнала давления, заключенного в пределах четвертого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
с тем чтобы в четвертом состоянии способ также мог отыскивать максимальное значение Y2max_postdic второй производной сигнала давления в пределах восьмого интервала, способ также проверяет, что максимальное значение Y2max_diatosys, определенное в первом состоянии (1), является не меньшим, чем значение Y2max_postdic, так что:
- если результат проверки является отрицательным, способ возвращается в первое состояние (1), принимая в качестве новой начальной точки Pstart точку, следующую за диастолической точкой Pdia и не следующую за дикротической точкой Pdic, тогда как
- если результат проверки является положительным, способ переходит в конечное состояние (7).
Всегда, согласно изобретению, в первом состоянии (1) принятие точек Pmin и Pmax в качестве диастолической Pdia и систолической Psys точек соответственно может зависеть от результата проверки того, что точка Pmin предшествует точке Pmax, так что:
- если результат проверки является отрицательным, способ возвращается к выполнению всех операций первого состояния, принимая в качестве новой начальной точки Pstart точку, не предшествующую Pmin, тогда как
- если результат проверки является положительным, точка Pmin принимается в качестве диастолической точки Pdia и точка Pmax принимается в качестве систолической точки Psys, и способ переходит к следующему второму состоянию.
К тому же, согласно изобретению, конечный автомат, в соответствии с которым оно работает, может содержать пятое состояние, способ переходит из четвертого состояния в конечное состояние посредством предварительного перехода в пятое состояние, в котором способ определяет точку P3 сигнала давления, соответствующую моменту времени t3, в котором вторая производная сигнала давления принимает абсолютное минимальное значение Y2min_systodic в пределах девятого интервала, не выходящего за пределы интервала, продолжающегося от систолической точки Psys до дикротической точки Pdic, способ затем переходит в конечное состояние, в котором он способен выдавать точку P3.
Предпочтительно, согласно изобретению упомянутый девятый интервал продолжается от момента времени, который является средним в пределах интервала, заключенного между систолической точкой Psys и дикротической точкой Pdic
tsys+(tdic-tsys)/2
до момента времени дикротической точки Pdic
tdic,
где tsys - момент времени, соответствующий систолической точке Psys, и tdic - момент времени, соответствующий дикротической точке Pdic.
Более того, согласно изобретению в четвертом состоянии способ может проверять, был ли обнаружен сигнал давления в аорте, так что:
- если результат проверки является положительным, способ переходит в конечное состояние, тогда как
- если результат проверки является отрицательным, способ переходит в пятое состояние.
В частности, такая проверка может происходить на основе заданной величины, касающейся места выявления сигнала, заданного оператором в качестве входных данных. Преимущественно, такая входная заданная величина может устанавливать значение соответствующего регистра или флага, по которому способ может точно проверить значение в четвертом состоянии.
Всегда, согласно изобретению конечный автомат, в соответствии с которым оно работает, может содержать шестое состояние, в которое способ переходит в случае, когда в третьем состоянии подтвердилось, что сигнал давления представляет вершину кривой с направленной вниз вогнутостью в пределах шестого интервала времени, способ переходит в шестое состояние после четвертого состояния перед переходом в конечное состояние, в шестом состоянии способ отыскивает в упомянутом шестом интервале времени точку Р4 относительного максимума после дикротической точки Pdic, то есть верхнюю точку вершины кривой, способ затем переходит в конечное состояние, в котором он способен выдавать точку P4.
К тому же, согласно изобретению в шестом состоянии способ также может отыскивать точку Pend относительного минимума сигнала давления в пределах десятого интервала, не выходящего за пределы интервала, продолжающегося от дикротической точки Pdic до точки Ptermination, удаленной от дикротической точки Pdic на шестое временное пороговое значение DENDPOSTDIC, в конечном состоянии способ является способным выдавать точку Pend в случае, когда она была определена в шестом состоянии.
Предпочтительно, согласно изобретению способ отыскивает точку Pend после того, как обладает определенной точкой Р4, и упомянутый десятый интервал продолжается от точки Р4 до точки Ptermination.
Всегда предпочтительно, согласно изобретению шестое временное пороговое значение DENDPOSTDIC не больше, чем 150 миллисекунд.
Более того, согласно изобретению способ может прибывать в шестое состояние, исходя из пятого состояния.
Неизменно, согласно изобретению в первом состоянии способ может отыскивать первую точку Pdec, следующую за начальной точкой Pstart, принадлежащей фазе убывания сигнала давления, первый интервал времени может продолжаться от первой точки Pdec убывания до точки, удаленной от определенного минимального значения Pmin на первое временное пороговое значение DTMIN_SYS, а второй интервал времени может продолжаться от первой точки Pdec убывания до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS.
К тому же, согласно изобретению третий и четвертый интервалы времени могут продолжаться от первой точки Pdec убывания до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS.
Более того, согласно изобретению третий и четвертый интервалы времени могут продолжаться от определенного минимального значения Pmin до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS.
В качестве альтернативы, согласно изобретению третий и четвертый интервалы времени могут продолжаться от определенного минимального значения Pmin до определенного максимального значения Pmax.
Неизменно, согласно изобретению во втором состоянии способ может отыскивать точку Pinflection посредством поиска абсолютного минимального значения Y1min_postsys первой производной сигнала давления в пределах пятого интервала времени, принимая точку сигнала давления, в которой его первая производная принимает абсолютное минимальное значение Y1min_postsys, в качестве точки Pinflection перегиба.
К тому же, согласно изобретению в третьем состоянии способ может проверять в шестом интервале времени, представляет ли сигнал давления вершину кривой с направленной вниз вогнутостью, посредством поиска абсолютного максимального значения Y1max_postsys первой производной сигнала давления и посредством проверки, что это значение Y1max_postsys является положительным, в соответствии с чем, сигнал давления представляет упомянутую вершину кривой в случае, когда значение Y1max_postsys является положительным.
Более того, согласно изобретению в третьем состоянии способ может отыскивать в пределах седьмого интервала времени первый относительный минимум кривой давления, посредством поиска момента времени, в который первая производная сигнала давления принимает нулевое значение в пределах упомянутого седьмого интервала времени.
Неизменно, согласно изобретению в четвертом состоянии поиск максимального значения Y1max_postdic первой производной и максимального значения Y2max_postdic второй производной сигнала давления в пределах восьмого интервала, и проверка, что оба значения являются не большими, чем максимальные значения Y1max_postdia и Y2max_diatosys, определенные в первом состоянии, могут быть выполнены только в случае, когда в третьем состоянии способ подтверждает, что сигнал давления представляет вершину кривой с направленной вниз вогнутостью в пределах шестого интервала времени.
К тому же, согласно изобретению, когда способ возвращается из четвертого состояния в первое состояние, он может принять точку, непосредственно предшествующую определенной дикротической точке Pdic, в качестве новой начальной точки Pstart.
Предпочтительно, согласно изобретению первое временное пороговое значение DTMIN_SYS не больше, чем 200 миллисекунд, еще более предпочтительно - не больше, чем 150 миллисекунд.
Неизменно предпочтительно, согласно изобретению второе временное пороговое значение DTMAX_SYS не больше, чем 380 миллисекунд, еще более предпочтительно - не больше, чем 350 миллисекунд.
К тому же, предпочтительно, согласно изобретению третье временное пороговое значение DTMAX_MINY1_SYS не больше, чем 250 миллисекунд, еще более предпочтительно - не больше, чем 200 миллисекунд.
Неизменно предпочтительно, согласно изобретению четвертое временное пороговое значение DTMAX_SYS2Y1DIC не больше, чем 250 миллисекунд, еще более предпочтительно - не больше, чем 200 миллисекунд.
К тому же, предпочтительно, согласно изобретению пятое временное пороговое значение DPOSTDIC не больше, чем 200 миллисекунд, еще более предпочтительно - не больше, чем 150 миллисекунд.
Неизменно предпочтительно, согласно изобретению сигнал давления дискретизирован с частотой 1кГц.
Более того, согласно изобретению из конечного состояния способ может вернуться к итеративному выполнению первого состояния посредством принятия точки, следующей за дикротической точкой Pdic, в качестве новой начальной точки Pstart.
Всегда, согласно изобретению, когда способ прибывает в конечное состояние из четвертого или пятого состояния, из конечного состояния способ может вернуться к итеративному выполнению первого состояния посредством принятия точки, следующей за дикротической точкой Pdic и удаленной от нее на седьмое временное пороговое значение DNEW, в качестве новой начальной точки Pstart, предпочтительно не короче, чем 1 миллисекунда и не длиннее, чем 150 миллисекунд.
К тому же, согласно изобретению, когда способ прибывает в конечное состояние из шестого состояния, в случае, когда в шестом состоянии точка Pend была определена, из конечного состояния способ может вернуться к итеративному выполнению первого состояния посредством принятия точки, следующей за дикротической точкой Pdic и предшествующей точке Pend, в качестве новой начальной точки Pstart, предпочтительно, посредством принятия точки, непосредственно предшествующей точке Pend, в качестве новой начальной точки Pstart.
Более того, согласно изобретению, когда способ прибывает в конечное состояние из шестого состояния, в случае, когда в шестом состоянии точка Pend не была определена, из конечного состояния способ может вернуться к итеративному выполнению первого состояния посредством принятия точки, следующей за дикротической точкой Pdic и не следующей за точкой Ptermination, в качестве новой начальной точки Pstart, предпочтительно, посредством принятия точки, непосредственно предшествующей точке Ptermination, в качестве новой начальной точки Pstart.
Кроме того, еще особым объектом изучения этого изобретения является компьютер, содержащий средство интерфейса ввода и/или вывода, запоминающее средство и средство обработки, отличающийся тем, что он пригоден для выполнения ранее описанного автоматизированного способа для выявления сердечного сокращения.
Дополнительно, отдельным объектом настоящего изобретения является устройство для выявления и анализа кровяного давления, содержащее компьютер и средство выявления кровяного давления, отличающееся тем, что упомянутый компьютер является только что проиллюстрированным компьютером.
Другим отдельным объектом этого изобретения является компьютерная программа, отличающаяся тем, что содержит кодовое средство, адаптированное, чтобы исполнять при выполнении на компьютере ранее описанный автоматизированный способ для выявления сердечного сокращения.
Дополнительным отдельным объектом этого изобретения является запоминающий носитель, читаемый компьютером, хранящий программу, отличающийся тем, что программа является только что описанной компьютерной программой.
Настоящее изобретение далее будет описано в качестве иллюстрации, а не в качестве ограничения, согласно его предпочтительным вариантам осуществления, с точной ссылкой на фигуры приложенных чертежей, на которых:
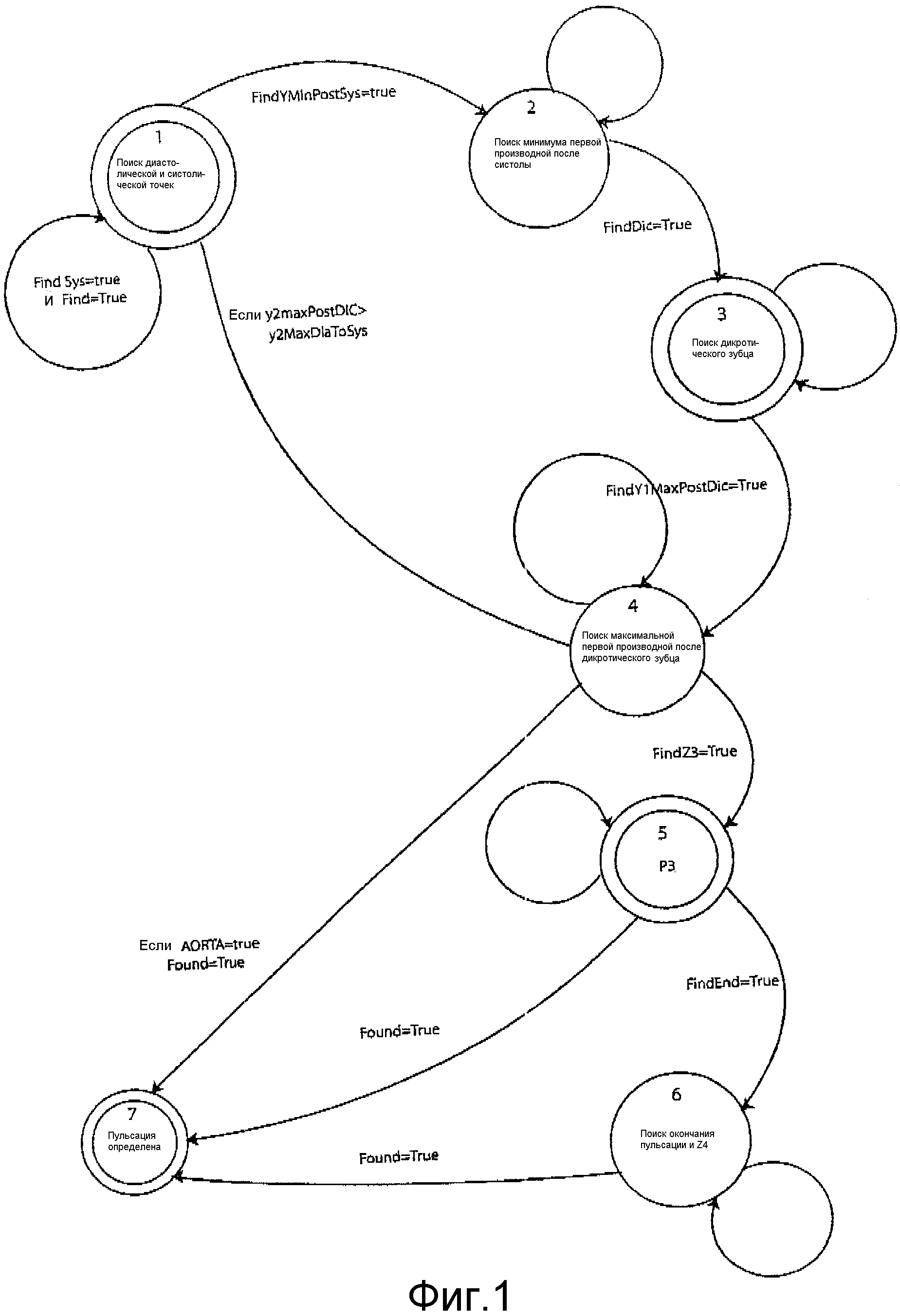
Фиг.1 показывает схематичную диаграмму конечного автомата, в соответствии с которым работает предпочтительный вариант осуществления способа согласно изобретению;
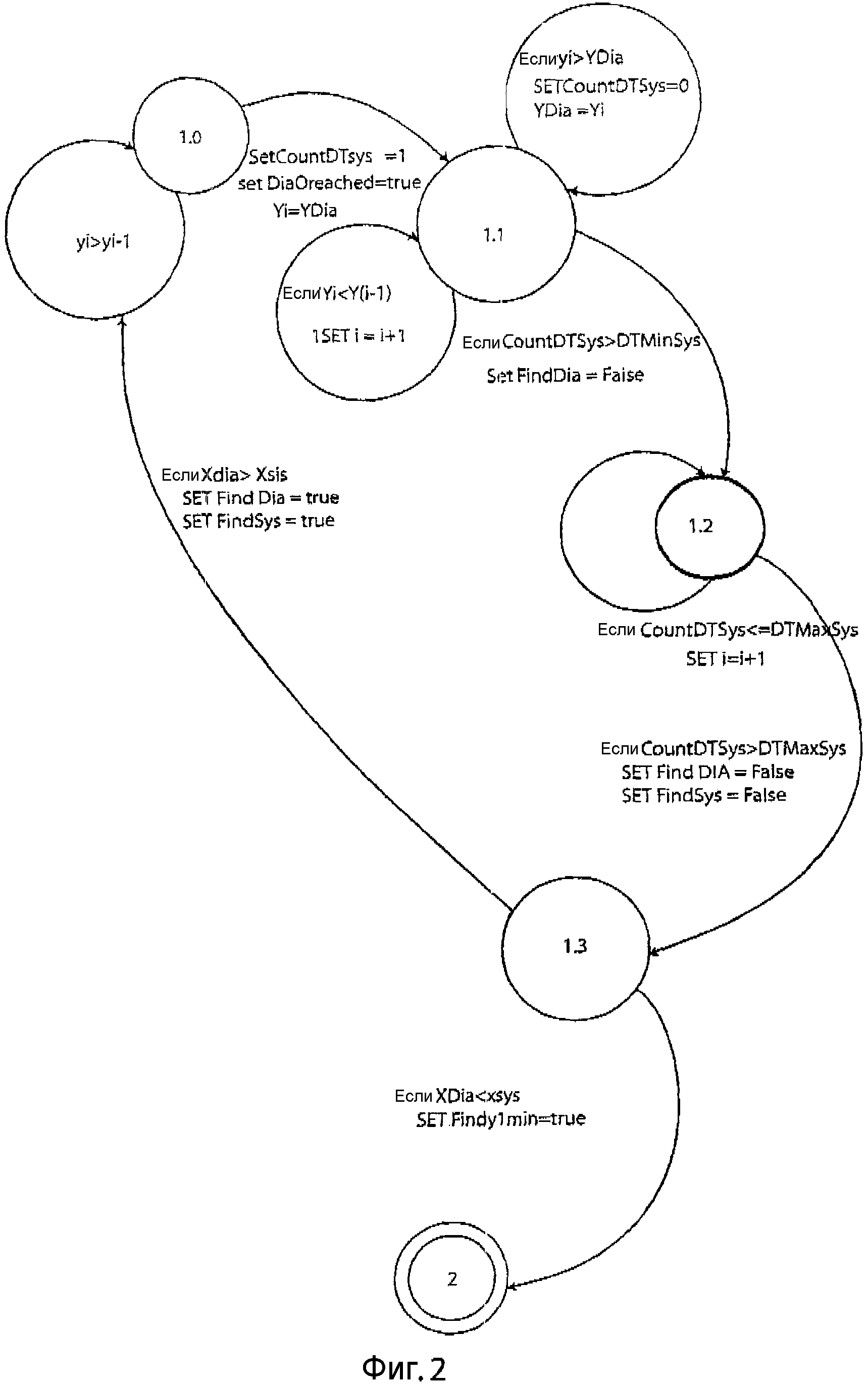
Фиг.2 показывает схематичную диаграмму первого состояния конечного автомата, показанного на фиг.1;
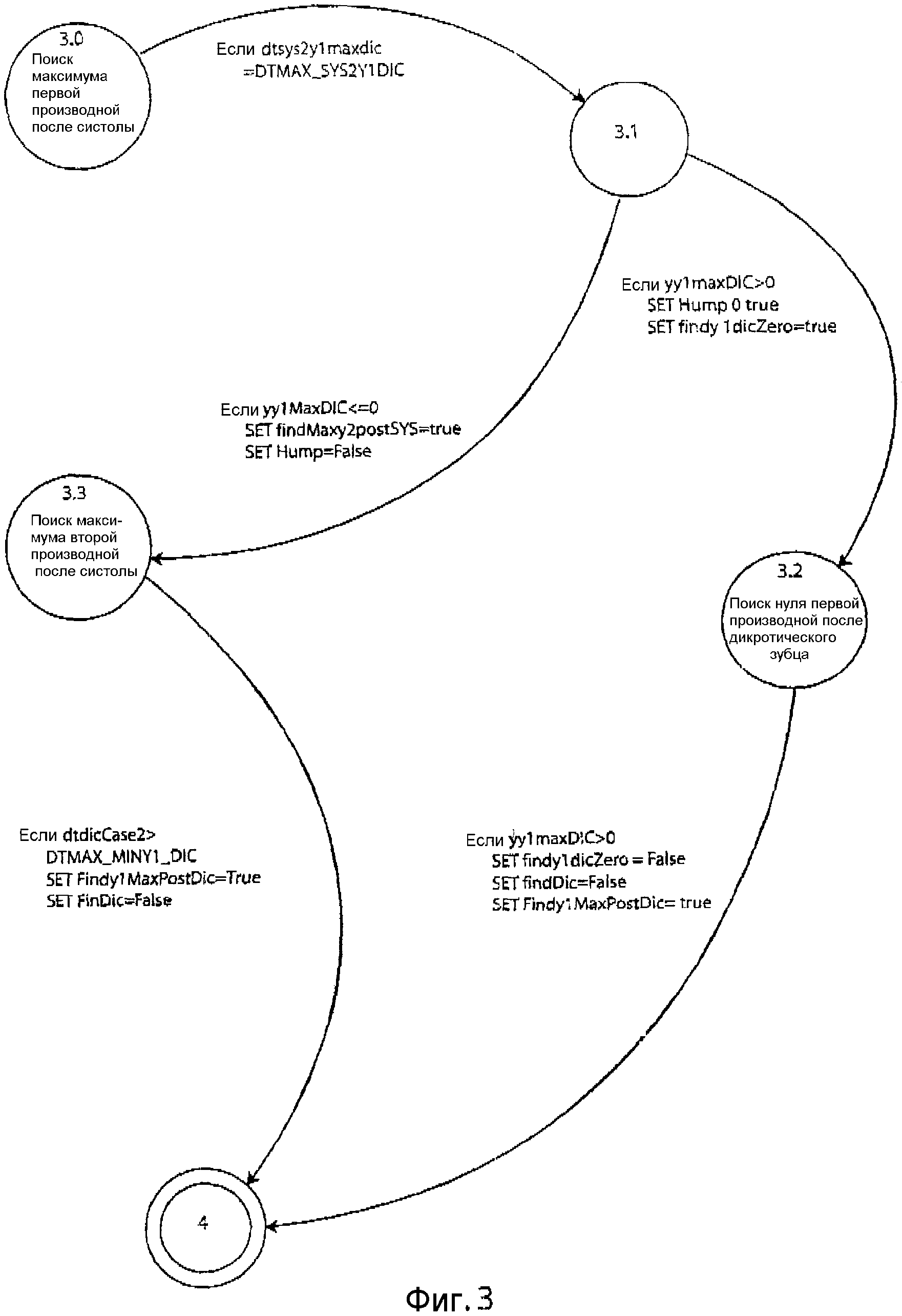
Фиг.3 показывает схематичную диаграмму третьего состояния конечного автомата, показанного на фиг.1;
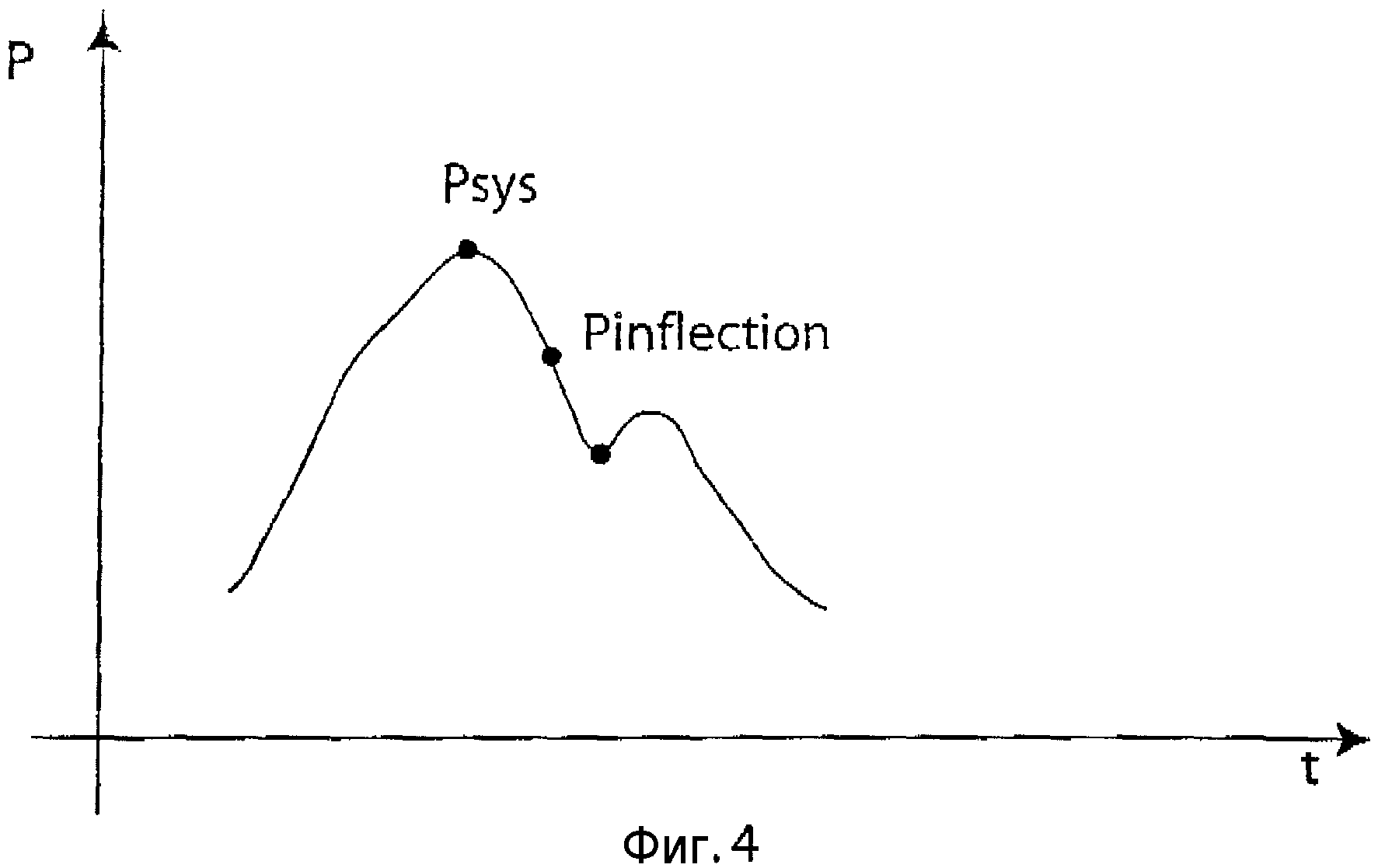
Фиг.4 показывает первую кривую давления, выявленную и проанализированную посредством предпочтительного варианта осуществления способа согласно изобретению;
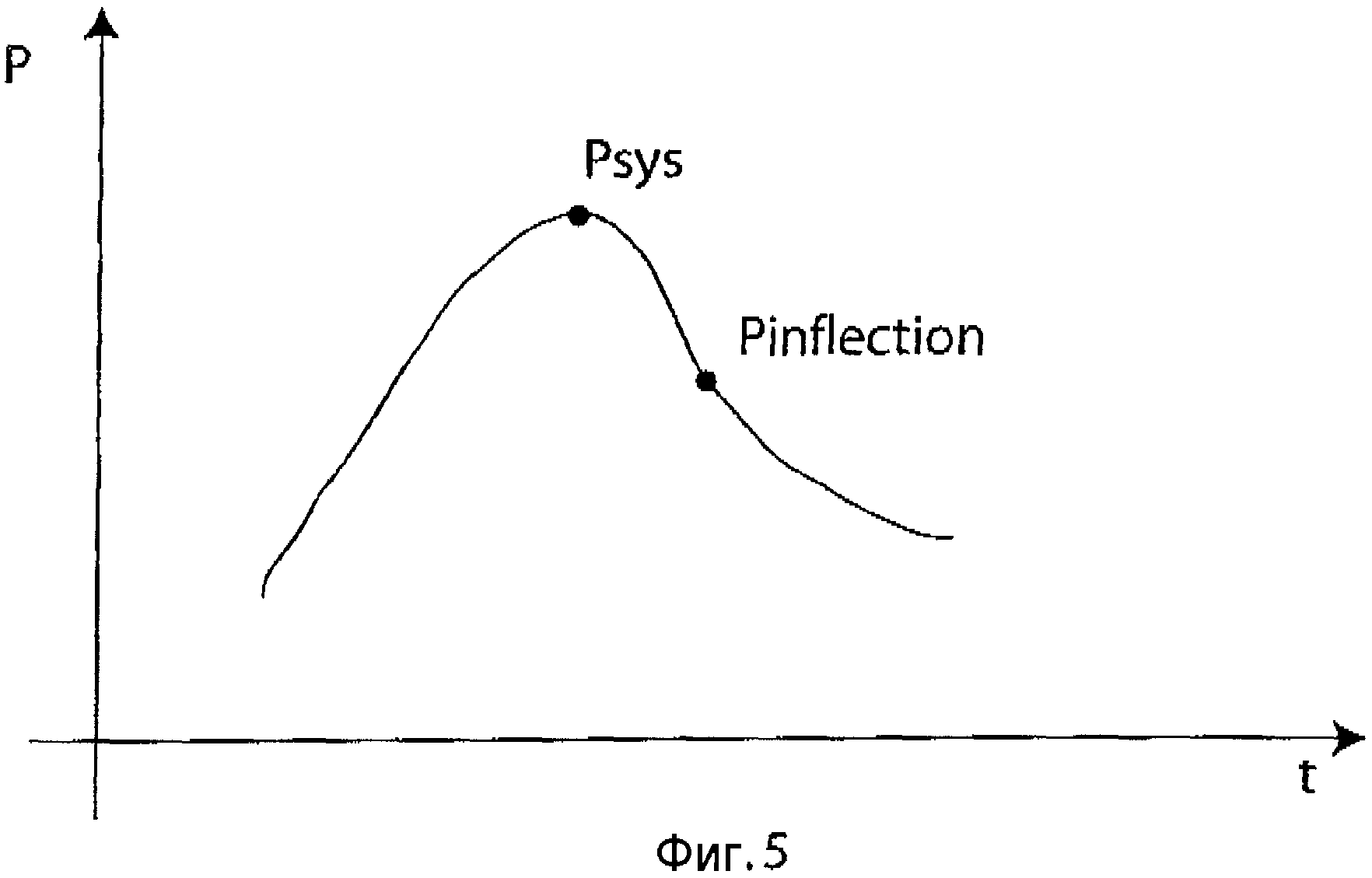
Фиг.5 показывает вторую кривую давления, выявленную и проанализированную посредством предпочтительного варианта осуществления способа согласно изобретению.
На чертежах одни и те же ссылки используются, чтобы указывать на идентичные элементы.
Изобретатели разработали способ, который предоставляет возможность сигналу давления быть выявленным во время сердечного цикла, объективность которого подтверждена тем обстоятельством, что способ является способным распознавать сигнал, полученный из кардиограммы, выполненной во время хирургической операции на сердце. Способ согласно изобретению исследует биологические сигналы, отыскивая характерные точки максимума и минимума и характерные промежуточные точки, символизирующие некоторые физиологические состояния.
Более конкретно, способ согласно изобретению позволяет кривой давления, произведенного сердцем в течение своего действия, быть распознанной. Изобретатели разработали способ, принимающий в расчет то, что колебание давления сердечного сокращения принимает ряд хорошо выделяемых форм, и они определили характеристические точки кривой, рассматривая их как события, которые должны быть обнаружены посредством способа. Способ, раскрытый изобретателями, действует как конечный автомат, принимающий различные состояния при распознании характерных точек сердечного сокращения.
В частности, для выявления сердечного сокращения в артериальной и/или венозной системе, способ согласно изобретению определяет систолическую фазу и диастолическую фазу. Систолическая фаза достигает высшей точки при достижении давлением относительного максимума, за исключением контрпульсаций, тогда как диастолическая фаза достигает высшей точки, за исключением патологических условий, при достижении давлением относительного минимума. Кроме того, способ дополнительно определяет третью точку, дикротический зубец, которая ассоциируется с сердечным сокращением. Дикротическая точка - это точка, в которой сердечный клапан закрывается, и математически она соответствует точке максимума второй производной или точке относительного минимума кривой давления, которая встречается следом за систолической точкой. Поэтому, конечный автомат сначала определяет эти три точки. Впоследствии, для того чтобы проверить, что три определенные точки действительно соответствуют сердечному сокращению, способ согласно изобретению удостоверяется в наличии ряда последующих событий с последовательностью, эквивалентной только что определенной. В положительном случае, когда такая очередность последующих событий встречается, способ распознает три предварительно определенные точки в качестве характерных точек сердечного сокращения, заканчивающегося в диастолической точке следующего сокращения.
Со ссылкой на фиг.1 может быть замечено, что конечный автомат, в соответствии с которым работает способ, согласно изобретению содержит семь основных состояний.
В первом состоянии 1 способ анализирует последовательность имеющихся в распоряжении значений давления, формирующих выявленную кривую давления, с тем чтобы определить:
- (относительное) минимальное значение давления, принятое в качестве диастолической точки Pdia;
- (относительное) максимальное значение давления, принятое в качестве систолической точки Psys;
- максимальное значение Y1max_postdia первой производной давления, заключенное между диастолическим значением и систолическим значением; и
- максимальное значение Y2max_diatosys второй производной давления, заключенное между диастолическим значением и систолическим значением.
В частности, первая производная давления пропорциональна разности между значениями в двух, следующих друг за другом моментах времени кривой давления, а вторая производная давления пропорциональна разности между значениями в двух, следующих друг за другом моментах времени первой производной давления. Более точно, коэффициент пропорциональности равен обратному значению разности между двумя, следующими друг за другом моментами времени, то есть обратному значению периода дискретизации сигнала давления. Не теряя достоверности, предпочтительный вариант осуществления способа принимает в качестве единичной разность между двумя, следующими друг за другом моментами времени, в соответствии с чем, первая производная давления равна разности между значениями в двух, следующих друг за другом моментах времени кривой давления, а вторая производная давления равна разности между значениями в двух, следующих друг за другом моментах времени первой производной.
Следовательно, должно быть учтено, что дискретные точки кривой давления и связанные производные рассматриваются одна за другой во временной последовательности. Предпочтительно, выявленная кривая давления дискретизируется на частоте 1кГц, тем самым значения давления из последовательности разнесены друг от друга на 1 миллисекунду.
Со ссылкой на фиг.2 может быть замечено, что состояние 1 содержит 4 подсостояния.
В подсостоянии 1.0 определяется первая точка Pdec, принадлежащая фазе убывания кривой давления, которая, следовательно, приводит к достижению точки относительного минимума. Предпочтительно, такое определение выполняется посредством поиска первой точки кривой давления, значение которой меньше, чем значение предшествующей точки. Как только такая точка Pdec определена, способ переходит к следующему подсостоянию 1.1.
В подсостоянии 1.1 способ отыскивает точку Pmin абсолютного минимума кривой давления. В предпочтительном варианте осуществления способа, согласно изобретению, показанном на чертежах, поиск точки Pmin происходит посредством сравнения значения каждой точки P(i) кривой со значением точки Pmin_current, которая сохраняет точку, имеющую минимальное значение на предварительно исследованном участке кривой (содержащем точки от Pdec до точки P(i-1), непосредственно предшествующей рассматриваемой точке P(i)), так что Pmin_current обновляется точкой P(i), с которой она сравнивается, т.е.
в случае, когда последняя имеет меньшее значение, т.е. в случае, когда
Pmin_current может быть предварительно проинициализирована точкой Pdec, определенной в состоянии 1.0.
В подсостоянии 1.1 способ также отыскивает точку Pmax абсолютного максимума кривой давления. В варианте осуществления, показанном на чертежах, Pmax также отыскивается, подобно Pmin, через сравнение значения каждой точки P(i) кривой со значением точки Pmax_current, которая хранит точку, имеющую максимальное значение на предварительно исследованном участке кривой (содержащем точки от Pdec до точки P(i-1), непосредственно предшествующей рассматриваемой точке P(i)), так что Pmax_current обновляется точкой P(i), с которой она сравнивается, т.е.
в случае, когда последняя имеет большее значение, т.е. в случае, когда
даже Pmax_current может быть предварительно проинициализирована точкой Pdec, определенной в состоянии 1.0.
Более того, способ отыскивает максимальное значение Y1max__postdia первой производной давления, следующее за диастолической точкой. В частности, в варианте осуществления, показанном на чертежах, такое максимальное значение Y1max__postdia отыскивается через сравнение значения каждой точки Y1(i) первой производной кривой со значением точки Y1max_current, которая хранит максимальное значение первой производной на предварительно исследованном участке кривой, содержащем точки, начиная с момента времени, соответствующего точке Pmin_current, до точки Y(i-1), непосредственно предшествующей исследуемой точке Y(i), так что Y1max_current обновляется точкой Y1(i), с которой она сравнивается, т.е.
в случае, когда последняя имеет большее значение, т.е. в случае, когда
Y1max_current может быть предварительно проинициализирована значением первой производной кривой давления, соответствующей точке Pmin_current.
Способ покидает подсостояние 1.1 и переходит в подсостояние 1.2, когда значение точки Pmin_current не обновлено за период, более длительный, чем минимальное пороговое значение DTMIN_SYS, предпочтительно равное 200 миллисекундам, еще более предпочтительно - 150 миллисекундам. С этой целью в подсостоянии 1.1 способ устанавливает счетчик времени в нуль каждый раз, когда точка Pmin_current обновляется, и производит его приращение каждый раз, когда сравнивает ее со следующей точкой P(i) кривой давления, проверяя, превысило ли значение счетчика времени минимальное пороговое значение DTMIN_SYS. Перед переходом в подсостояние 1.2 способ принимает точку Pmin_current в качестве точки Pmin абсолютного минимума кривой давления. Другими словами, в подсостоянии 1.1 способ считает, что последняя точка Pmin_current должна быть диастолической точкой, и, следовательно, прекращает ее поиск, когда кривая давления остается над ее значением на минимальный период, соответствующий, главным образом, минимальному физиологическому промежутку времени между диастолической точкой и систолической точкой.
В подсостоянии 1.2 способ продолжает поиски точки Pmax абсолютного максимума кривой давления и максимального значения Y1max__postdia первой производной давления, следующего за диастолической точкой. Предпочтительно, поиски происходят аналогично тем, что происходят в подсостоянии 1.1, в соответствии с чем, в варианте осуществления способа, показанного на чертежах, они выполняются в соотвествии с формулами [3] и [4], и [5] и [6] соответственно. Такие поиски продолжаются на промежутке времени от точки Pmin, равном максимальному пороговому значению DTMAX_SYS, предпочтительно, не большему, чем 380 миллисекунд, еще более предпочтительно - не большему, чем 350 миллисекунд. С этой целью в подсостоянии 1.2, при каждом сравнении точки кривой давления с точкой Pmax_current способ осуществляет приращение счетчика времени, использованного в подсостоянии 1.1, проверяя, превысило ли значение счетчика времени максимальное пороговое значение DTMAX_SYS. Перед переходом в следующее подсостояние 1.3 способ принимает точку Pmax_current в качестве точки Pmax абсолютного максимума кривой давления и значение Y1max_current - в качестве максимального значения Y1max__postdia первой производной давления, следующего за диастолической точкой. Другими словами, в подсостоянии 1.2 способ отыскивает систолическую точку (и максимальное значение первой производной давления, следующего за диастолической точкой) на интервале кривой давления, соответствующем, главным образом, максимальному физиологическому промежутку времени между диастолической точкой и систолической точкой.
Способ выполняет одновременный поиск диастолической точки и систолической точки в подсостоянии 1.1 для принятия в расчет сердечной аритмии и контрпульсации (тем самым, диастолическая и систолическая точки могут быть относительными, вместо того, чтобы быть абсолютными точками максимума и минимума кривой давления), и возможный шум, вносимый в кривую давления событиями, не соотвествующими физиологии кривой, как например, электрический шум, кашель пациента или перемещение инструмента выявления кровяного давления (например, катетера). Такой одновременный поиск, в случае сильных шумов, может дать физиологически неправильный результат, при котором точка Pmin абсолютного минимума следует за точкой Pmax абсолютного максимума. Поэтому, в подсостоянии 1.3 способ убеждается, что точка Pmin, определенная в подсостоянии 1.1, предшествует точке Pmax, определенной в подсостоянии 1.1 или 1.2.
Если результат проверки является отрицательным, способ возвращается к выполнению подсостояния 1.0, начиная с предварительно определенной точки Pmin кривой давления. Таким образом, подсостояние 1.1 будет отыскивать точку абсолютного минимума, следующую за такой же, предварительно определенной точкой.
Иначе, если проверка выдала положительный результат, точка Pmin абсолютного минимума принимается в качестве диастолической точки Pdia и точка Pmax абсолютного максимума принимается в качестве систолической точки Psys; также, способ определяет максимальное значение Y2max_diatosys второй производной давления, которое заключено между диастолической точкой и систолической точкой. Такое определение может, кроме того, быть выполнено совместно с поисками диастолической и систолической точек, посредством соответствующей модификации подсостояний 1.1 и 1.2. В заключение, способ переходит в следующее второе состояние 2.
Временные проверки, выполненные в подсостояниях 1.1 и 1.2, позволяют способу согласно изобретению принимать в расчет тот факт, что когда сердечная частота изменяется, систолическая фаза является физиологически постоянной по длительности величиной (в соответствии с чем, систолическая точка возникает в интервале, тянущемся от, примерно, 150 до, примерно, 360 миллисекунд, после диастолической точки), тогда как диастолическая фаза, наоборот, варьирует свою длительность, когда частота изменяется; следовательно, способ правильно распознает диастолическую и систолическую точки, даже в случае очень низкой сердечной частоты.
По-прежнему делая ссылку на фиг. 1, как только диастолическая Pdia и систолическая Psys точки и значения Y1max_postdia и Y2max_diatosys определены, конечный автомат входит во второе состояние 2, в котором способ согласно изобретению отыскивает абсолютное минимальное значение Y1min_postsys первой производной давления после систолы в интервале с длительностью, равной DTMAX_MINY1_SYS, следующем за систолой; в частности, DTMAX_MINY1_SYS равен максимальной длительности физиологического интервала, в котором минимальное значение первой производной давления следует за систолической точкой, и он, предпочтительно, не длинее 250 миллисекунд, еще более предпочтительно - не длиннее 200 миллисекунд. Таким образом, способ определяет точку Pinflection перегиба, следующую за систолой кривой давления, в которой первая производная давления принимает абсолютное минимальное значение Y1min_postsys, для того чтобы различать случаи, когда кривая давления выявляется в условиях сильных шумов, в соответствии с чем форма сигнала давления может представлять небольшую вершину кривой или короткий пологий участок, непосредственно следующий за систолой, и на котором способ мог бы затем ошибочно распознать дикротическую точку. Взамен, определение абсолютного минимального значения Y1min_postsys безошибочно сдвигает поиск дикротического зубца за пределы этих маленьких вершин кривой или пологих участков, непосредственно следующих за систолой.
Впоследствии, конечный автомат входит в третье состояние 3, в котором способ согласно изобретению отыскивает дикротическую точку.
Со ссылкой на фиг.3 может быть замечено, что состояние 3 содержит 4 подсостояния.
В подсостоянии 3.0, в интервале времени c длительностью, равной DTMAX_SYS2Y1DIC, следующем за точкой Pinflection перегиба, определяется точка Y1max_postsys абсолютного максимума первой производной, с переходом, затем, в следующее состояние 3.1. В частности, DTMAX_SYS2Y1DIC равно максимальной длительности физиологического интервала, в котором дикротический зубец следует за точкой перегиба, и, предпочтительно, DTMAX_SYS2Y1DIC не больше 250 миллисекунд, еще более предпочтительно - не больше 200 миллисекунд.
В подсостоянии 3.1 способ проверяет, является ли точка Y1max_postsys, определенная в подсостоянии 3.0, положительной.
Если результат проверки является положительным, это означает, что кривая давления представляет вершину кривой после дикротической точки, как схематично показано на фиг. 4, в силу чего, в этом случае дикротическая точка Pdic соответствует точке первого относительного минимума кривой давления, следующей за точкой Pinflection перегиба, определенной во втором состоянии 2. Поэтому, способ выполняет подсостояние 3.2, в котором определяет такую точку Pdic, посредством определения момента времени, в который первая производная кривой давления принимает нулевое значение на интервале времени, с длительностью, равной DTMAX_SYS2Y1DIC, следующем за точкой Pinflection перегиба. Способ затем переходит в следующее, четвертое состояние 4.
Взамен, в случае, когда результат проверки в подсостоянии 3.1 был отрицательным, или точка Y1max_postsys абсолютного максимума первой производной, определенная в подсотоянии 3.0, не является положительной, кривая давления не представляет никакой вершины после дикротической точки, и последняя соответствует точке, в которой вторая производная давления принимает максимальное значение. Поэтому, способ выполняет подсостояние 3.3, в котором он определяет дикротическую точку Pdic, посредством определения момента времени, в котором вторая производная кривой давления принимает максимальное значение Y2max_postinflection на интервале времени, с длительностью, равной DTMAX_SYS2Y1DIC, следующем за точкой Pinflection перегиба. Способ затем переходит в следующее, четвертое состояние 4.
По-прежнему делая ссылку на фиг.1, конечный автомат входит в четвертое состояние 4, в котором способ согласно изобретению определяет максимальное значение Y1max_postdic первой производной и максимальное значение Y2max_postdic второй производной кривой давления, после дикротической точки Pdic, определенной в третьем состоянии 3. Такой поиск осуществляется в интервале DPOSTDIC, следующем за дикротической точкой, предпочтительно, не более длинном, чем 150 миллисекунд. Впоследствии, способ проверяет, является ли меньшим, чем только что определенное значение соответствующей производной, соответственно, Y1max_postdic и Y2max_postdic, по меньшей мере, одно из двух максимальных значений Y1max_postdia и Y2max_diatosys, принадлежащих, соответственно, первой производной и второй производной давления, следующим за диастолической точкой, и которые определены в первом состоянии 1. Такая проверка необходима, для того чтобы различить случай, в котором, когда представлены конкретные сигналы давления, имеющие вершины кривой после дикротического зубца, определенная дикротическая точка Pdic является, фактически, диастолической точкой. Это пример кривой давления, выявленной на чрезвычайно упругом сердце (таком, как сердце атлета), находящемся в напряжении, при этом, возможно проверить, что дикротическая точка имеет меньшее значение давления, чем в диастолической точке. Однако, даже в этом случае, физиологическая скорость нарастания кривой давления вдоль участка между диастолической точкой и систолической точкой больше, чем физиологический темп нарастания кривой давления после дикротической точки. Это различается посредством всего лишь сравнения максимальных значений первой и второй производных после, соответственно, точки, принятой в качестве диастолической точки, и точки, принятой в качестве дикротической точки.
В этом отношении, другие варианты осуществления способа согласно изобретению выполняют в четвертом состоянии 4 определение значений Y1max_postdic и Y2max_postdic, и их сравнение со значениями Y1max_postdia и Y2max_diatosys, только в случае, когда в третьем состоянии 3 было установлено наличие вершины кривой после дикротической точки.
В случае, когда проверка дает положительный результат (то есть, по меньшей мере, одно из двух значений Y1max_postdia и Y2max_diatosys меньше, чем Y1max_postdic или Y2max_postdic соответственно), определенная диастолическая точка Pdia, систолическая точка Psys и дикротическая точка Pdic не соответствуют физиологически правильной кривой давления, и способ возвращается к выполнению подсостояния 1.0 первого состояния 1, начиная с точки, следующей за Pdia, которая была определена в качестве диастолической точки и предшествующей Pdic, определенной в качестве дикротической точки, для определения диастолической и/или систолической и/или дикротической точек, отличающихся от тех, которые были предварительно определены. Предпочтительно, способ возвращается к выполнению подсостояния 1.0 первого состояния 1, начиная с точки, непосредственно предшествующей точке Pdic, определенной в третьем состоянии 3 в качестве дикротической точки.
В случае, когда проверка дает отрицательный результат (то есть оба значения Y1max_postdia и Y2max_diatosys больше, чем значения Y1max_postdic или Y2max_postdic соответственно), определенные точки Pdia, Psys, и Pdic являются физиологически правильными, и способ дополнительно проверяет, была ли обнаружена кривая давления в аорте.
В положительном случае, способ сразу переходит в конечное состояние 7, в котором он выдает все выявленные данные в качестве характеристических данных сокращения, кривую давления которого способ исследовал, и, возможно, возвращается к выполнению первого состояния 1 для исследования следующего сокращения.
В отрицательном случае (кривая давления была обнаружена в аорте), способ переходит в пятое состояние 5, в котором он определяет точку Р3 кривой давления, соответствующую моменту времени t3, в который вторая производная кривой принимает минимальное значение Y2min_systodic по интервалу между систолической точкой и дикротической точкой. Предпочтительно, интервал продолжается от точки, являющейся средней в интервале, заключенном между систолической точкой Psys и дикротической точкой Pdic, до следующей точки Pdic. Другими словами, интервал, в котором определено значение Y2min_systodic, предпочтительно, продолжается от момента времени
tsys+(tdic-tsys)/2
до момента времени
tdic,
где tsys - момент времени, соответствующий систолической точке, а tdic - момент времени, соответствующий дикротической точке.
Впоследствии, в случае, когда в третьем состоянии 3 наличие вершины вдоль кривой давления не было распознано, способ переходит к выполнению конечного состояния 7; в противном случае (в третьем состоянии 3 было установлено, что кривая давления имеет вершину) способ переходит к выполнению шестого состояния 6.
В шестом состоянии 6 способ отыскивает точку Р4 относительного максимума после дикротической точки, то есть верхнюю точку вершины кривой, соответствующую моменту времени, в который первая производная кривой давления принимает неотрицательное минимальное значение в пределах интервала, следующего за дикротической точкой. В частности, поиск точки P4 выполняется в пределах интервала DPOSTDIC, следующего за дикротическим зубцом.
Более того, в шестом состоянии 6 способ также отыскивает точку Pend относительного минимума после дикротической точки, то есть окончание исследуемого сокращения. В частости, поиск точки Pend выполняется по интервалу, продолжающемуся от точки P4 до точки Ptermination, удаленной на DENDPOSTDIC от дикротической точки Pdic, равному максимальному физиологическому промежутку времени между дикротической точкой и следующим аномальным сокращением (экстрасистолой) или ускоренным сокращением (высокие сердечные частоты); предпочтительно, DENDPOSTDIC - не больше, чем 150 миллисекунд. В заключение, способ переходит в конечное состояние 7.
Как сказано, в конечном состоянии 7 способ выдает все выявленные данные в качестве характеристических данных сокращения, кривую давления которого способ исследовал, и, возможно, возвращается к выполнению первого состояния 1 для исследования следующего сокращения. В частности, в случае, когда состояние 7 достигается из состояния 4 или состояния 5, способ возвращается к выполнению первого состояния 1, начиная с точки, следующей за дикротической точкой Pdic через интервал DNEW, который, предпочтительно, не короче, чем 1 миллисекунда и не длиннее, чем 150 миллисекунд; в случае, когда состояние 7 достигается из состояния 6, способ возвращается к выполнению подсостояния 1.0 первого состояния 1, начиная с точки, следующей за дикротической точкой Pdic и предшествующей определенной точке Pend (предпочтительно, начиная с точки, непосредственно предшествующей определенной точке Pend), или, в случае, когда точка Pend не была определена, с точки, следующей за дикротической точкой Pdic и не следующей за точкой Ptermination (предпочтительно, начиная с точки, непосредственно предшествующей определенной точке Ptermination).
Преимущества, полученные благодаря способу согласно изобретению, многочисленны.
Во-первых, способ является способным добиваться распознавания пульса из анализа кривой давления, произведенного сердцем во время его работы, достоверно разграничивая начальную и конечную точки каждого сокращения.
Кроме того, способ является способным различать случаи, в которых диастолическая и систолическая точки являются относительными, а не абсолютными точками минимума и максимума, когда кривая давления также представляет другие точки минимума и максимума. Фактически, диастолическая и систолическая точки распознаются как действительные, только если при переходе от одной к другой, первая производная (а также вторая производная) кривой давления достигает своего максимума в пределах полного сокращения.
Кроме того, способ определяет диастолическую, систолическую и дикротическую точки посредством исследования интервалов времени, довольно протяженных, вокруг точек максимума или минимума или перегиба.
Программа определяет диастолическую, систолическую и дикротическую точки в пределах временных границ, физиологически зависящих от места, где выявляется давление. В частности, фактическое закрытие пульсации происходит после того, как были определены диастолическая, систолическая и дикротическая точки следующего сокращения.
Способ согласно изобретению также позволяет, в случае очень низкой частоты, определять сокращение, несмотря на ограничения, накладываемые на время между дикротическим зубцом и диастолой, поскольку принимается во внимание тот факт, что систолическая фаза физиологически не очень изменчива по длительности, когда меняется сердечная частота, тогда как диастолическая фаза, наоборот, изменяет свою длительность, когда меняется частота.
Более того, способ согласно изобретению позволяет сигналу электрокардиограммы быть достоверно изученным.
Выше были описаны предпочтительные варианты осуществления и были предложены некоторые модификации этого изобретения, но должно быть понято, что специалисты в данной области техники могут создать другие варианты и изменения, не выходя от связанного объема охраны, как определено последующей формулой изобретения.
Реферат
Группа изобретений относится к медицине и предназначена для осуществления автоматизированного способа выявления сердечного сокращения на основе дискретизированного сигнала кровяного давления. Варианты способа включают определение начальной точки Pstart, по меньшей мере, диастолической точки Pdia, систолической точки Psys и дикротической точки Pdic сигнала давления. Также группа изобретений включает компьютер, содержащий средство интерфейса ввода и/или вывода, запоминающее средство и средство обработки данных. Компьютер выполнен с возможностью выполнения автоматизированного способа для выявления сердечного сокращения. Предложенная группа позволяет повысить точность измерения давления путем распознавания аномальных сердечных сокращений и их исключения из процесса измерения. 6 н. и 106 з.п. ф-лы, 5 ил.
Формула
абсолютное минимальное значение Pmin давления посредством просмотра значений давления, заключенных в пределах первого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на первое временное пороговое значение DTMIN_SYS,
абсолютное максимальное значение Рmах давления, посредством просмотра значений давления, заключенных в пределах второго интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS, и
максимальное значение Y1max-postdia первой производной сигнала давления, заключенное в пределах третьего временного интервала, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
способ принимает точку Pmin в качестве диастолической точки Pdia, а точку Рmах в качестве систолической точки Psys, и переходит в следующее второе состояние (2);
В. второе состояние (2), в котором способ отыскивает точку Pinflection перегиба сигнала давления, следующую за систолической точкой Psys в четвертом интервале времени, не выходящем за пределы интервала, начинающегося от систолической точки Psys и с длительностью, равной третьему временному пороговому значению DTMAX_MINY1_SYS, способ затем переходит в следующее третье состояние (3);
С. третье состояние (3), в котором способ проверяет в пятом интервале времени, не выходящем за пределы интервала, начинающегося от точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, при этом четвертое временное пороговое значение DTMAX_SYS2Y1DIC равно максимальной длительности физиологического интервала, в котором дикротическая точка следует за точкой перегиба, представляет ли сигнал давления вершину кривой с направленной вниз вогнутостью, так что:
если результат проверки является положительным, способ отыскивает в шестом интервале времени, не выходящем за пределы интервала, начинающегося с точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, момент времени, в который первая производная кривой давления принимает нулевое значение, и последний принимается в качестве дикротической точки Pdic, тогда как
если результат проверки является отрицательным, способ отыскивает в упомянутом шестом интервале времени, момент времени, в который вторая производная сигнала давления принимает максимальное значение Y2max postinflection, и имеющая отношение точка сигнала давления принимается в качестве дикротической точки Pdic, затем способ переходит в следующее четвертое состояние (4);
D. четвертое состояние (4), в котором способ отыскивает максимальное значение Y1max postdic первой производной сигнала давления в седьмом интервале, не выходящем за пределы интервала, начинающегося от дикротической точки Pdic и с длительностью, равной пятому временному пороговому значению DPOSTDIC, способ проверяет, что максимальное значение Y1max postdia, определенное в первом состоянии (1), является не меньшим, чем значение Y1max_postdic, так что:
если результат проверки является отрицательным, способ возвращается в первое состояние (1), принимая в качестве новой начальной точки Pstart точку, следующую за диастолической точкой Pdia и не следующую за дикротической точкой Pdic, тогда как
если результат проверки является положительным, способ переходит в конечное состояние (7); и
E. конечное состояние (7), в котором способ способен выдавать диастолическую точку Pdia, систолическую точку Psys и дикротическую точку Pdic.
если результат проверки является отрицательным, способ возвращается к выполнению всех операций первого состояния (1), принимая в качестве новой начальной точки Pstart точку, не предшествующую Pmin, тогда как если результат проверки является положительным, точка Pmin принимается в качестве диастолической точки Pdia и точка Рmах принимается в качестве систолической точки Psys, и способ переходит в следующее второе состояние (2).
tsys+(tdic-tsys)/2
до момента времени дикротической точки Pdic
tdic,
где tsys - момент времени, соответствующий систолической точке Psys, a
tdic - момент времени, соответствующий дикротической точке Pdic.
А. первое состояние (1), в котором способ отыскивает:
абсолютное минимальное значение Pmin давления, посредством просмотра значений давления, заключенных в пределах первого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на первое временное пороговое значение DTMIN_SYS,
абсолютное максимальное значение Рmах давления, посредством просмотра значений давления, заключенных в пределах второго интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS, и
максимальное значение Y1max_postdia первой производной сигнала давления, заключенное в пределах третьего временного интервала, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
максимальное значение Y2max_diatosys второй производной сигнала давления, заключенное в пределах четвертого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
способ принимает точку Pmin в качестве диастолической точки Pdia, a точку Рmах в качестве систолической точки Psys, и переходит в следующее второе состояние (2);
B. второе состояние (2), в котором способ отыскивает точку Pinflection перегиба сигнала давления, следующую за систолической точкой Psys в четвертом интервале времени, не выходящем за пределы интервала, начинающегося от систолической точки Psys и с длительностью, равной третьему временному пороговому значению DTMAX_MINY1_SYS, способ затем переходит в следующее третье состояние (3);
C. третье состояние (3), в котором способ проверяет в пятом интервале времени, не выходящем за пределы интервала, начинающегося от точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, при этом четвертое временное пороговое значение DTMAX_SYS2Y1DIC равно максимальной длительности физиологического интервала, в котором дикротическая точка следует за точкой перегиба, представляет ли сигнал давления вершину кривой с направленной вниз вогнутостью, так что:
если результат проверки является положительным, способ отыскивает в шестом интервале времени, не выходящем за пределы интервала, начинающегося с точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, момент времени, в который первая производная кривой давления принимает нулевое значение, и последний принимается в качестве дикротической точки Pdic, тогда как
если результат проверки является отрицательным, способ отыскивает в упомянутом шестом интервале времени момент времени, в который вторая производная сигнала давления принимает максимальное значение Y2max_postinflection, и имеющая отношение точка сигнала давления принимается в качестве дикротической точки Pdic,
затем, способ переходит в следующее четвертое состояние (4);
D. четвертое состояние (4), в котором способ отыскивает максимальное значение Y1max_postdic первой производной сигнала давления и максимальное значение Y2max_postdic второй производной сигнала давления в седьмом интервале, не выходящем за пределы интервала, начинающегося от дикротической точки Pdic и с длительностью, равной пятому временному пороговому значению DPOSTDIC, способ проверяет, что максимальное значение Y1max_postdia, определенное в первом состоянии (1), является не меньшим, чем значение Y1max_postdic и что максимальное значение Y2max_diatosys, определенное в первом состоянии (1) является не меньшим, чем значение Y2max_postdic, так что:
в случае, если по меньшей мере одно из двух значений Y1max-postdia и Y2max_diatosys меньше, чем, соответственно, Y1max_postdic и Y2max_postdic, способ возвращается в первое состояние (1), принимая в качестве новой начальной точки Pstart точку, следующую за диастолической точкой Pdia и не следующую за дикротической точкой Pdic, тогда как
в случае, если оба значения Y1max_postdia и Y2max_diatosys больше, чем, соответственно, значения Y1max_postdic и Y2max_postdic, способ переходит в конечное состояние (7)); и
E. конечное состояние (7), в котором способ способен выдавать диастолическую точку Pdia, систолическую точку Psys и дикротическую точку Pdic.
если результат проверки является отрицательным, способ возвращается к выполнению всех операций первого состояния (1), принимая, в качестве новой начальной точки Pstart точку, не предшествующую Pmin, тогда как
если результат проверки является положительным, точка Pmin принимается в качестве диастолической точки Pdia и точка Рmах принимается в качестве систолической точки Psys, и способ переходит в следующее второе состояние(2).
tsys+(tdic-tsys)/2
до момента времени дикротической точки Pdic
tdic,
где tsys - момент времени, соответствующий систолической точке Psys, a tdic - момент времени, соответствующий дикротической точке Pdic.
абсолютное минимальное значение Pmin давления, посредством просмотра значений давления, заключенных в пределах первого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на первое временное пороговое значение DTMIN SYS,
абсолютное максимальное значение Рmах давления, посредством просмотра значений давления, заключенных в пределах второго интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS, и
максимальное значение Y1max_postdia первой производной сигнала давления, заключенное в пределах третьего временного интервала, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
максимальное значение Y2max_diatosys второй производной сигнала давления, заключенное в пределах четвертого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
способ принимает точку Pmin в качестве диастолической точки Pdia, a точку Рmах в качестве систолической точки Psys, и переходит в следующее второе состояние (2);
B. второе состояние (2), в котором способ отыскивает точку Pinflection перегиба сигнала давления, следующую за систолической точкой Psys в четвертом интервале времени, не выходящем за пределы интервала, начинающегося от систолической точки Psys и с длительностью, равной третьему временному пороговому значению DTMAX_MINY1_SYS, способ затем переходит в следующее третье состояние (3);
C. третье состояние (3), в котором способ проверяет в пятом интервале времени, не выходящем за пределы интервала, начинающегося от точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, при этом четвертое временное пороговое значение DTMAX_SYS2Y1DIC равно максимальной длительности физиологического интервала, в котором дикротическая точка следует за точкой перегиба, представляет ли сигнал давления вершину кривой с направленной вниз вогнутостью, так что:
если результат проверки является положительным, способ отыскивает в шестом интервале времени, не выходящем за пределы интервала, начинающегося с точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, момент времени, в который первая производная кривой давления принимает нулевое значение, и последний принимается в качестве дикротической точки Pdic, тогда как
если результат проверки является отрицательным, способ отыскивает в упомянутом шестом интервале времени, момент времени, в который вторая производная сигнала давления принимает максимальное значение Y2max_postinflection, и имеющая отношение точка сигнала давления принимается в качестве дикротической точки Pdic,
затем способ переходит в следующее четвертое состояние (4);
D. четвертое состояние (4), в котором способ отыскивает максимальное значение Y1max_postdic первой производной сигнала давления и максимальное значение Y2max_postdic второй производной сигнала давления в седьмом интервале, не выходящем за пределы интервала, начинающегося от дикротической точки Pdic и с длительностью, равной пятому временному пороговому значению DPOSTDIC, способ проверяет, что максимальное значение Y1max_postdia, определенное в первом состоянии (1), является не меньшим, чем значение Y1max_postdic и что максимальное значение Y2max_diatosys, определенное в первом состоянии (1) является не меньшим, чем значение Y2max_postdic, так что:
в случае, если по меньшей мере одно из двух значений Y1max_postdia и Y2max_diatosys меньше, чем, соответственно, Y1max_postdic и Y2max_postdic, способ возвращается в первое состояние (1), принимая в качестве новой начальной точки Pstart точку, следующую за диастолической точкой Pdia и не следующую за дикротической точкой Pdic, тогда как
в случае, если оба значения Y1max_postdia и Y2max_diatosys больше, чем, соответственно, значения Y1max_postdic и Y2max_postdic, способ проверяет, действительно ли сигнал давления был обнаружен в аорте, так что:
если результат проверки является положительным, способ переходит в конечное состояние (7), тогда как
если результат проверки является отрицательным, способ переходит в пятое состояние (5); и
E. пятое состояние (5), в котором способ определяет точку Р3 сигнала давления, соответствующую моменту времени t3, в котором вторая производная сигнала давления принимает абсолютное минимальное значение Y2min_systodic в пределах восьмого интервала, не выходящего за пределы интервала, продолжающегося от систолической точки Psys до дикротической точки Pdic, затем способ переходит в конечное состояние (7); и
F. конечное состояние (7), в котором способ способен выдавать диастолическую точку Pdia, систолическую точку Psys, дикротическую точку Pdic и точку Р3, если способ прошел через пятое состояние (5).
tsys+(tdic-tsys)/2
до момента времени дикротической точки Pdic
tdic,
где tsys - момент времени, соответствующий систолической точке Psys, a
tdic - момент времени, соответствующий дикротической точке Pdic.
А. первое состояние (1), в котором способ отыскивает:
абсолютное минимальное значение Pmin давления, посредством просмотра значений давления, заключенных в пределах первого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на первое временное пороговое значение DTMIN_SYS,
абсолютное максимальное значение Рmах давления, посредством просмотра значений давления, заключенных в пределах второго интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на второе временное пороговое значение DTMAX_SYS, и
максимальное значение Y1max_postdia первой производной сигнала давления, заключенное в пределах третьего временного интервала, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
максимальное значение Y2max_diatosys второй производной сигнала давления, заключенное в пределах четвертого интервала времени, не выходящего за пределы интервала, продолжающегося от начальной точки Pstart до точки, удаленной от определенного минимального значения Pmin на период, равный второму временному пороговому значению DTMAX_SYS,
способ принимает точку Pmin в качестве диастолической точки Pdia, a точку Рmах в качестве систолической точки Psys, и переходит в следующее второе состояние (2);
B. второе состояние (2), в котором способ отыскивает точку Pinflection перегиба сигнала давления, следующую за систолической точкой Psys в четвертом интервале времени, не выходящем за пределы интервала, начинающегося от систолической точки Psys и с длительностью, равной третьему временному пороговому значению DTMAX_MINY1_SYS, способ затем переходит в следующее третье состояние (3);
C. третье состояние (3), в котором способ проверяет в пятом интервале времени, не выходящем за пределы интервала, начинающегося от точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, при этом четвертое временное пороговое значение DTMAX_SYS2Y1DIC равно максимальной длительности физиологического интервала, в котором дикротическая точка следует за точкой перегиба, представляет ли сигнал давления вершину кривой с направленной вниз вогнутостью, так что:
если результат проверки является положительным, способ отыскивает в шестом интервале времени, не выходящем за пределы интервала, начинающегося с точки Pinflection перегиба и с длительностью, равной четвертому временному пороговому значению DTMAX_SYS2Y1DIC, момент времени, в который первая производная кривой давления принимает нулевое значение, и последний принимается в качестве дикротической точки Pdic, тогда как
если результат проверки является отрицательным, способ отыскивает в упомянутом шестом интервале времени, момент времени, в который вторая производная сигнала давления принимает максимальное значение Y2max_postinflection, и имеющая отношение точка сигнала давления принимается в качестве дикротической точки Pdic,
затем способ переходит в следующее четвертое состояние (4); D. четвертое состояние (4), в котором способ отыскивает максимальное значение Y1max_postdic первой производной сигнала давления и максимальное значение Y2max_postdic второй производной сигнала давления в седьмом интервале, не выходящем за пределы интервала, начинающегося от дикротической точки Pdic и с длительностью, равной пятому временному пороговому значению DPOSTDIC, способ проверяет, что максимальное значение Y1max_postdia, определенное в первом состоянии (1), является не меньшим, чем значение Y1max_postdic и что максимальное значение Y2max_diatosys, определенное в первом состоянии (1) является не меньшим, чем значение Y2max_postdic, так что:
в случае, если по меньшей мере одно из двух значений Y1max_postdia и Y2max_diatosys меньше, чем, соответственно, Y1max_postdic и Y2max_postdic, способ возвращается в первое состояние (1), принимая в качестве новой начальной точки Pstart точку, следующую за диастолической точкой Pdia и не следующую за дикротической точкой Pdic, тогда как
в случае, если оба значения Y1max_postdia и Y2max_diatosys больше, чем, соответственно, значения Y1max_postdic и Y2max_postdic, способ проверяет, действительно ли сигнал давления был обнаружен в аорте, так что:
если результат проверки является положительным, способ переходит в конечное состояние (7), тогда как
если результат проверки является отрицательным, способ переходит в пятое состояние (5); и
E. пятое состояние (5), в котором способ определяет точку Р3 сигнала давления, соответствующую моменту времени t3, в котором вторая производная сигнала давления принимает абсолютное минимальное значение Y2min_systodic в пределах восьмого интервала, не выходящего за пределы интервала, продолжающегося от систолической точки Psys до дикротической точки Pdic, затем способ переходит
либо в шестое состояние (6), в случае, когда в третьем состоянии (3) он убедился, что сигнал давления представляет вершину кривой с направленной вниз вогнутостью в пределах пятого интервала времени,
либо в конечное состояние (7), в случае, когда в третьем состоянии (3) он убедился, что сигнал давления не представляет вершину кривой с направленной вниз вогнутостью в пределах пятого интервала времени; и
F. шестое состояние (6), в котором способ отыскивает в упомянутом пятом интервале времени точку Р4 относительного максимума после дикротической точки Pdic, то есть верхнюю точку вершины кривой, затем способ переходит в конечное состояние (7),
G. конечное состояние (7), в котором способ способен выдавать диастолическую точку Pdia, систолическую точку Psys, дикротическую точку Pdic, точку Р3, если способ прошел через пятое состояние (5), и точку Р4, если способ прошел через шестое состояние (6).
tsys+(tdic-tsys)/2
до момента времени дикротической точки Pdic
tdic,
где tsys - момент времени, соответствующий систолической точке Psys, a
tdic - момент времени, соответствующий дикротической точке Pdic.
Комментарии