Транспортное средство - RU154645U1
Код документа: RU154645U1
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ПОЛЕЗНАЯ МОДЕЛЬ
Настоящая полезная модель относится к способам и системам для работы двигателя внутреннего сгорания.
УРОВЕНЬ ТЕХНИКИ
Регулируемая установка фаз клапанного распределения используется в транспортных средствах с двигателями внутреннего сгорания для управления установкой фаз распределения клапанов цилиндров двигателя, чтобы увеличивать производительность двигателя, повышать экономию топлива, повышать ездовые качества и уменьшать выбросы. Системы регулируемой установки фаз клапанного распределения могут управляться гидравлически электронным контроллером модуля управления силовой передачей (см. например US 2012/316751, опубл. 13.12.2012, МПК F01M 1/16; F01M 11/10), направляющим масло под высоким давлением, чтобы приводить в действие кулачки с приводом от масла под давлением для изменения установки фаз клапанного распределения.
Авторы в материалах настоящего описания выявили различные проблемы у вышеприведенной системы. В частности, модули управления силовой передачей ограничивают перемещение кулачков в условиях низкого давления масла вследствие пониженной устойчивости управляемости кулачков. Это ограниченное перемещение кулачков является неблагоприятным в некоторых условиях, так как оно может делать транспортное средство неспособным вырабатывать достаточный крутящий момент. Например, после буксировки тяжелого груза вверх по затяжному склону, при остановке транспортного средства, водитель может быть неспособным пускать транспортное средство в ход, несмотря на полное нажатие педали акселератора, вследствие низкой скорости вращения двигателя и высокой температуры масла, которые приводят к низкому давлению масла. В этом примере, модуль управления силовым приводом ограничивает перемещение кулачков вследствие низкого давления масла, логически выведенного из высокой температуры масла, и скорость вращения двигателя ограничивается гидротрансформатором, который пробуксовывает на низкой скорости вращения двигателя. Следовательно, транспортное средство обездвиживается, так как не вырабатывается достаточный крутящий момент для пуска в ход транспортного средства. В других примерах, недостаточный крутящий момент для пуска в ход транспортного средства может возникать в условиях движения, включающих в себя одно или более из большой высоты над уровнем моря, подъема по склону и буксировки прицепа на почти нулевой скорости транспортного средства.
СУЩНОСТЬ ПОЛЕЗНОЙ МОДЕЛИ
Одним из подходов, который по меньшей мере частично преодолевает вышеприведенные проблемы, является создание транспортного средства, содержащего
двигатель;
кулачок с приводом от давления масла; и
контроллер с исполняемыми командами для:
регулировки установки фаз кулачкового распределения в ответ на запрошенный крутящий момент и запрошенную скорость транспортного средства в первом состоянии движения транспортного средства, причем независимо от имеющегося в распоряжении крутящего момента, и для ограничения регулировки установки фаз кулачкового распределения в ответ на перегрев масла при повышенных нагрузках; и
отмены ограничения регулировки установки фаз кулачкового распределения в ответ на имеющийся в распоряжении крутящий момент, недостаточный для удовлетворения запрошенного крутящего момента, во втором состоянии, следующем за первым состоянием.
Также предложен способ, включающий в себя этапы, на которых осуществляют в ответ на первое состояние, при котором давление масла ниже порогового давления масла и скорость вращения двигателя ниже порогового скорости вращения двигателя, ограничение перемещения кулачков при движении транспортного средства, а в остановленном состоянии транспортного средства, отмену ограниченного перемещения кулачков. В еще одном варианте осуществления, способ включает в себя этапы, на которых осуществляют в первом состоянии движения транспортного средства, регулировку установки фаз кулачкового распределения в ответ на запрошенный крутящий момент и запрошенную скорость транспортного средства, причем независимо от имеющегося в распоряжении крутящего момента, и ограничение регулировки установки фаз клапанного распределения в ответ на перегрев масла при повышенных нагрузках. Более того, во втором состоянии, следующем за первым состоянием, способ включает в себя этап, на котором осуществляют отмену пределов регулировки установки фаз клапанного распределения в ответ на имеющийся в распоряжении крутящий момент, являющийся недостаточным для удовлетворения запрошенного крутящего момента. Таким образом, можно добиваться технического результата изменения положения кулачков посредством системы регулируемой установки фаз клапанного распределения для увеличения имеющегося в распоряжении крутящего момента, даже во время состояния, когда давление масла или логически выведенное давление масла на основании температуры масла может быть низким. В частности, в ответ на условия транспортного средства, способ может заменять собой традиционные стратегии управления изменением положения кулачков, основанные на логически выведенном или действующем давлении масла, чтобы повышать имеющийся в распоряжении крутящий момент.
Следует понимать, что сущность полезной модели, приведенная выше, представлена для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании. Не предполагается идентифицировать ключевые или существенные признаки заявленного предмета полезной модели, объем которой однозначно определен формулой полезной модели, которая сопровождает подробное описание. Более того, заявленный предмет полезной модели не ограничен вариантами осуществления, которые исключают какие-либо недостатки, отмеченные выше или в любой части этого описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает схематичное изображение примерного двигателя, содержащего систему регулируемой установки фаз клапанного распределения.
Фиг. 2, 3, 4 и 5 показывают блок-схемы последовательности операций примерного способа изменения положения кулачков для двигателя в ответ на первое состояние и второе состояние.
Фиг. 6 показывает примерную временную диаграмму для изменения положения кулачков для двигателя в ответ на первое состояние и второе состояние.
Фиг. 7 показывает схему примерной системы для управления положением кулачков.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ПОЛЕЗНОЙ МОДЕЛИ
Последующее описание относится к системе и способу для двигателя внутреннего сгорания, содержащим ограничение перемещения кулачков в первом состоянии и отмену ограничений перемещения кулачков в ответ на второе состояние. Второе состояние может содержать температуру масла выше пороговой температуры масла, и транспортное средство, являющееся остановленным. Кроме того, второе состояние может содержать имеющийся в распоряжении крутящий момент, являющийся меньшим, чем запрошенный крутящий момент, на более чем пороговую разность крутящих моментов. Например, во втором состоянии, транспортное средство может обездвиживаться, имея недостаточный имеющийся в распоряжении крутящий момент (или недостаточное разрежение во впускном коллекторе) для пуска в ход транспортного средства или для работы привода вспомогательных устройств передней части. Таким образом, имеющийся в распоряжении крутящий момент (или недостаточное разрежение на впуске) может повышаться в ответ на второе состояние, давая транспортному средству возможность преодолевать неспособность осуществлять пуск в ход. Кроме того еще, способ, описанный в материалах настоящего описания, может сохранять производственные затраты и сложность производства двигателя. Соответственно, пуск в ход или приведение в движение транспортного средства в ответ на имеющийся в распоряжении крутящий момент, являющийся меньшим, чем запрошенный крутящий момент, на большую, чем пороговая, разность крутящих моментов, вытесняет поддержание экономии топлива, снижение выбросов топлива и сохранение ездовых качеств транспортного средства. Более того, имеющийся в распоряжении крутящий момент также может повышаться посредством изменения положения кулачков для увеличения коэффициента наполнения двигателя. Дополнительные действия для повышения имеющегося в распоряжении крутящего момента независимо от поддержания экономии топлива, уменьшения выбросов топлива и сохранения ездовых качеств транспортного средства могут включать в себя понижение нагрузок привода вспомогательных устройств передней части, переключение с понижением на более низкую передачу, обогащение топливно-воздушного соотношения, закрывание клапана перепускной заслонки для выхлопных газов, работу на полном дросселе, осуществление опережения установки момента зажигания для максимизации тормозного момента, понижение температуры наддувочного воздуха, отпускание тормозов и включение турбонагнетателя.
Фиг. 1 показывает примерный двигатель внутреннего сгорания, содержащий контроллер и систему регулируемой установки фаз клапанного распределения, а фиг.7 показывает схему примерной системы для управления положением кулачков. Фиг. 2, 3, 4 и 5 показывают блок-схемы последовательности операций способа изменения положения кулачков в ответ на первое состояние. Фиг. 6 иллюстрирует временную диаграмму, показывающую изменения условий работы двигателя наряду с выполнением указанного способа.
С обращением к фиг. 1, проиллюстрировано схематичное изображение, показывающая один цилиндр многоцилиндрового двигателя 10, который может быть включен в силовую установку транспортного средства. Двигатель 10 может управляться, по меньшей мере частично, системой управления, включающей в себя контроллер 12, и входными сигналами от водителя 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала РР положения педали. Положение педали у педали акселератора может использоваться для указания запрошенного крутящего момента, Tqreq, контроллеру 12 посредством датчика 134 положения педали. Камера 30 (например, цилиндр) сгорания двигателя 10 может включать в себя стенки 32 камеры сгорания с поршнем 36, расположенными в них. Поршень 36 может быть присоединен к коленчатому валу 40, так чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 4 0 может быть присоединен к по меньшей мере одному ведущему колесу транспортного средства через промежуточную систему трансмиссии. Кроме того, стартерный электродвигатель может быть присоединен к коленчатому валу 40 через маховик, чтобы давать возможность операции запуска двигателя 10. Скорость вращения ведущего колеса может указывать имеющийся в распоряжении крутящий момент, Tqavail из двигателя 10. Более того, скорость вращения ведущего колеса и датчик 134 положения педали акселератора вместе могут указывать имеющийся в распоряжении крутящий момент относительно запрошенного крутящего момента.
Камера 30 сгорания может принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42 и может выпускать газообразные продукты сгорания выхлопных газов через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут избирательно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления, камера 30 сгорания может включать в себя два или более впускных клапанов и/или два или более выпускных клапанов.
Топливная форсунка 66 показана расположенной во впускном канале 42 в конфигурации, которая предусматривает то, что известно как впрыск топлива во впускной канал во впускное отверстие выше по потоку от камеры 30 сгорания. Топливная форсунка 66 может впрыскивать топливо пропорционально длительности импульса сигнала FPW, принятого из контроллера 12 через электронный формирователь 68. Топливо может подаваться в топливную форсунку 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и направляющую-распределитель для топлива. В некоторых вариантах осуществления, камера 30 сгорания, в качестве альтернативы или дополнительно, может включать в себя топливную форсунку, присоединенную непосредственно к камере 30 сгорания, для впрыска топлива прямо в нее некоторым образом, известным как непосредственный впрыск. В некоторых случаях, непосредственный впрыск может давать повышенное охлаждение цилиндров двигателя, которое может уменьшать детонацию и предоставлять возможность для более высоких степеней сжатия и повышенного коэффициента полезного действия двигателя по сравнению с работой без непосредственного впрыска топлива.
Впускной канал 42 может включать в себя дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере, положение дроссельной заслонки 64 может регулироваться контроллером 12 посредством сигналов, выдаваемых на электродвигатель или исполнительный механизм, заключенный дросселем 62, конфигурацией, которая обычно указывается ссылкой как электронный регулятор дросселя (ETC). Таким образом, дроссель 62 может приводиться в действие для варьирования всасываемого воздуха, подаваемого в камеру 30 сгорания, среди других цилиндров двигателя. Положение дроссельной заслонки 64 может выдаваться в контроллер 12 сигналом TP положения дросселя. Впускной канал 42 может включать в себя датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для выдачи соответствующих сигналов MAF и MAP в контроллер 12.
Система 88 зажигания может выдавать искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал SA опережения зажигания из контроллера 12, при выбранных рабочих режимах. Хотя показаны компоненты искрового зажигания, в некоторых вариантах осуществления, камера 30 сгорания или одна или более других камер сгорания двигателя 10 могут эксплуатироваться в режиме воспламенения от сжатия, с или без свечи зажигания.
Датчик 126 выхлопных газов показан присоединенным к выпускному каналу 48 выше по потоку от устройства 70 снижения токсичности выхлопных газов. Датчик 126 может быть любым подходящим датчиком для выдачи показания соотношения воздуха выхлопных газов/топлива, таким как линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода в выхлопных газах), двухрежимный датчик кислорода или EGO, HEGO (подогреваемый EGO), датчик содержания NOx, HC, или CO. Устройство 70 снижения токсичности выхлопных газов показано расположенным вдоль выпускного канала 48 ниже по потоку от датчика 126 выхлопных газов. Устройство 70 снижения токсичности выхлопных газов может быть трехкомпонентным каталитическим нейтрализатором (TWC), уловителем NOx, сажевым фильтром, различными другими устройствами снижения токсичности выхлопных газов или их комбинациями. В качестве примера, двигатель может эксплуатироваться при в целом стехиометрическом топливно-воздушном соотношении, чтобы уменьшать выбросы NOx. В некоторых вариантах осуществления, во время работы двигателя 10, устройство 70 снижения токсичности выхлопных газов может периодически восстанавливаться посредством приведения в действие по меньшей мере одного цилиндра двигателя в пределах конкретного топливно-воздушного соотношения.
Датчик 76 выхлопных газов полного объема показан присоединенным к выпускному каналу 48 ниже по потоку от устройства 70 снижения токсичности выхлопных газов. Датчик 76 может быть любым подходящим датчиком для выдачи показания соотношения воздуха выхлопных газов/топлива, таким как линейный датчик кислорода или UEGO (универсальный или широкодиапазонный датчик кислорода в выхлопных газах), двухрежимный датчик кислорода или EGO, HEGO (подогреваемый EGO), датчик содержания NOx, HC, или CO. Кроме того, множество датчиков выхлопных газов может быть расположено в местоположениях частичного объема в пределах устройств снижения токсичности выхлопных газов. Другие датчики 72, такие как датчик массы воздуха (AM), дополнительный датчик EGO, и/или датчик температуры, могут быть расположены выше по потоку от устройства 70 снижения токсичности выхлопных газов, чтобы контролировать соответственно AM, содержание кислорода и температуру выхлопных газов, поступающих в устройство снижения токсичности выхлопных газов. Местоположения датчиков, показанные на фиг. 1, являются просто одним из примеров различных возможных конфигураций. Например, система снижения токсичности выхлопных газов может включать в себя установку частичного объема с сильно связанными каталитическими нейтрализаторами.
Компрессор 14 втягивает воздух из воздушного впускного канала 42 для питания впускного канала 42 наддува. Выхлопные газы вращают турбину 16, которая присоединена к компрессору 14 через вал 17. В некоторых примерах, также может быть предусмотрен охладитель наддувочного или всасываемого воздуха (не показан). Скорость вращения компрессора может регулироваться посредством регулировки положения устройства управления регулируемыми лопастями или перепускного клапана компрессора. В альтернативных примерах, перепускная заслонка 20 для выхлопных газов может заменять или использоваться в дополнение к устройству управления регулируемыми лопастями. Устройство управления регулируемыми лопастями может регулировать положение лопастей 19 турбины 16 с изменяемой геометрией. Выхлопные газы могут проходить через турбину 16, подавая небольшую энергию для вращения турбины 16, когда лопасти 19 находятся в открытом положении. Выхлопные газы могут проходить через турбину 16 и прикладывать повышенное усилие к турбине 16, когда лопасти 19 находятся в закрытом положении. В качестве альтернативы, перепускная заслонка 20 для выхлопных газов предоставляет выхлопным газам возможность течь в обход турбины 16, чтобы уменьшать количество энергии, подаваемой на турбину 16. Более того, турбина 16 может быть турбиной с постоянной геометрией. Перепускной клапан компрессора (не показан) может предоставлять сжатому воздуху на выпуске компрессора 14 возможность возвращаться на вход компрессора 14. Таким образом, отдача компрессора 14 может уменьшаться, чтобы оказывать влияние на расход компрессора 14 и снижать вероятность всплеска колебаний компрессора. Таким образом, двигатель может содержать двигатель с турбонаддувом. В других примерах, двигатель может содержать двигатель с наддувом, при этом компрессор 14 нагнетателя используется для сжатия всасываемого воздуха, но компрессор не присоединен к валу и не приводится в движение турбиной с приводом от выхлопных газов. Мощность компрессора нагнетателя, например, может выдаваться механически, посредством ремня, шестерни, вала или цепи, присоединенных к коленчатому валу двигателя.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, включающего в себя микропроцессорный блок 102, порты 104 ввода/вывода, электронный запоминающий носитель для исполняемых программ и калибровочных значений, показанный в качестве микросхемы 106 постоянного запоминающего устройства в этом конкретном примере, оперативное запоминающее устройство 108, энергонезависимую память 110 и шину данных. Контроллер 12 может принимать различные сигналы с датчиков, присоединенных к двигателю 10, в дополнение к тем сигналам, которые обсуждены ранее, в том числе, измерение вводимого массового расхода воздуха (MAF) с датчика 120 массового расхода воздуха; температуру хладагента двигателя (ECT) с датчика 112 температуры, присоединенного к патрубку 114 охлаждения; сигнал профильного считывания зажигания (PIP) с датчика 118 на эффекте Холла (или другого типа), присоединенного к коленчатому валу 40; положение дросселя (TP) с датчика положения дросселя; AM и/или температуру выхлопных газов, поступающих в каталитический нейтрализатор, с датчика 72; топливно-воздушное соотношение выхлопных газов с датчика 76; и сигнал абсолютного давления в коллекторе, MAP, с датчика 122. Сигнал скорости вращения двигателя, RPM, может формироваться контроллером 12 из сигнала PIP. Сигнал давления в коллекторе, MAP, с датчика давления в коллекторе может использоваться для выдачи указания разряжения или давления во впускном коллекторе. Отметим, что могут использоваться различные комбинации вышеприведенных датчиков, такие как датчик MAF без датчика MAP, или наоборот. Во время стехиометрической работы, датчик MAP может давать показание крутящего момента двигателя (например, имеющегося в распоряжении крутящего момента). Кроме того, этот датчик, наряду с выявленной скоростью вращения двигателя, может давать оценку заряда (включающего в себя воздух), введенного в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика скорости вращения двигателя, может вырабатывать заданное количество равноразнесенных импульсов на каждый оборот коленчатого вала. Дополнительно, контроллер 12 может поддерживать связь с устройством 136 отображения группы, например, для предупреждения водителя о неисправностях в системе двигателя или доочистки выхлопных газов.
Постоянное запоминающее устройство 106 запоминающего носителя может быть запрограммировано машиночитаемыми данными, представляющими команды, исполняемые процессором 102 для выполнения способов, описанных ниже, а также вариантов, которые предвосхищены, но специально не перечислены.
Каждая камера 30 сгорания (например, цилиндр) может обслуживаться одним или более клапанов. В настоящем примере, каждый цилиндр 30 включает в себя соответствующие впускной клапан 52 и выпускной клапан 54. Двигатель 10 дополнительно включает в себя один или более распределительных валов 65 для приведения в действие впускного клапана 52 и/или выпускного клапана 54. В изображенном примере, распределительный вал 65 для впускных клапанов присоединен к впускному клапану 52 и может приводиться в действие для управления впускным клапаном 52. В некоторых вариантах осуществления, где впускные клапаны множества цилиндров 30 присоединены к общему распределительному валу для впускных клапанов, общий распределительный вал для впускных клапанов может приводиться в действие, чтобы управлять впускными клапанами всех присоединенных цилиндров.
Впускной клапан 52 управляется между открытым положением, которое допускает всасываемый воздух в соответствующий цилиндр, и закрытым положением, по существу блокирующим всасываемый воздух от цилиндра. Распределительный вал 65 для впускных клапанов может быть включен в систему 69 привода впускных клапанов. Распределительный вал 65 для впускных клапанов включает в себя впускной кулачок 67, который имеет профиль выступа кулачка для открывания впускного клапана 52 в течение определенной продолжительности времени впуска. В некоторых вариантах осуществления (не показанных), распределительный вал может включать в себя дополнительные впускные кулачки с альтернативным профилем выступа кулачка, который предоставляет впускному клапану 52 возможность открываться на альтернативную продолжительность времени (в материалах настоящего описания также указываемые ссылкой как система переключения профиля кулачков). На основании профиля выступа дополнительного кулачка, альтернативная продолжительность времени может быть более продолжительной или более короткой, чем определенная продолжительность времени впуска впускного кулачка 67. Профиль выступа может оказывать влияние на высоту подъема кулачка, продолжительность времени кулачка и/или установку фаз кулачкового распределения. Контроллер может быть способен переключать продолжительность времени впускного клапана, перемещая распределительный вал 65 впускных клапанов в продольном направлении и осуществляя переключение между профилями кулачков.
Таким же образом, каждый выпускной клапан 54 приводится в действие между открытым положением, допускающим выход выхлопных газов из соответствующего цилиндра, и закрытым положением, по существу удерживающим газы внутри цилиндра. Следует принимать во внимание, что несмотря на то, что только впускной клапан 52 показан являющимся с кулачковым приводом, выпускной клапан 54 также может приводиться в действие подобным распределительным валом для выпускных клапанов (не показан). В некоторых вариантах осуществления, где выпускной клапан множества цилиндров 30 присоединен к общему распределительному валу, распределительный вал для выпускных клапанов может приводиться в действие, чтобы управлять выпускными клапанами всех связанных цилиндров. Как и с распределительным валом 65 для впускных клапанов, когда включен в состав, распределительный вал для выпускных клапанов может включать в себя выпускные кулачки, имеющие профиль выступа кулачка для открывания выпускного клапана 54 в течение определенной продолжительности времени выпуска. В некоторых вариантах осуществления, распределительный вал для выпускных клапанов дополнительно может включать в себя дополнительные выпускные кулачки с альтернативным профилем выступа кулачка, который предоставляет выпускному клапану 54 возможность открываться на альтернативную продолжительность времени. Профиль выступа может оказывать влияние на высоту подъема кулачка, продолжительность времени кулачка и/или установку фаз кулачкового распределения. Контроллер может быть способным переключать продолжительность времени выпускного клапана, перемещая распределительный вал выпускных клапанов в продольном направлении и осуществляя переключение между профилями кулачков.
Следует принимать во внимание, что распределительные валы для впускных и/или выпускных клапанов могут быть привязаны к подмножествам цилиндров, и могут присутствовать многочисленные распределительные валы для впускных и/или выпускных клапанов. Например, первый распределительный вал для впускных клапанов может быть присоединен к впускным клапанам первого подмножества цилиндров наряду с тем, что второй распределительный вал для впускных клапанов может быть присоединен к впускным клапанам второго подмножества цилиндров. Подобным образом, первый распределительный вал для выпускных клапанов может быть присоединен к выпускным клапанам первого подмножества цилиндров наряду с тем, что второй распределительный вал для выпускных клапанов может быть присоединен к выпускным клапанам второго подмножества цилиндров. Кроме того еще, один или более впускных клапанов и выпускных клапанов могут быть присоединены к каждому распределительному валу. Подмножество цилиндров, присоединенных к распределительному валу может быть основано на их положении вдоль блока цилиндров, порядке их работы, конфигурации двигателя, и т.д.
Система 69 привода впускных клапанов и система привода выпускных клапанов (не показана) дополнительно может включать в себя штоки толкателя, рычаги коромысла, толкатели, и т.д. Такие устройства и признаки могут управлять приводом впускного клапана 52 и выпускного клапана 54, преобразуя вращательное движение кулачков в поступательное движение клапанов. Как обсуждено ранее, клапаны также могут приводиться в действие посредством дополнительных профилей выступа кулачка на распределительных валах, где профили выступа кулачка между разными клапанами могут обеспечивать меняющуюся высоту подъема кулачка, продолжительность времени кулачка и/или установку фаз кулачкового распределения. Однако, альтернативные компоновки распределительного вала (поверх головки блока и/или с толкателями клапана) могли бы использоваться, если требуется. Кроме того, в некоторых примерах, цилиндры 30 каждый может иметь более чем один выпускной клапана и/или впускной клапан. Кроме того других примерах, каждый из выпускного клапана 54 и впускного клапана 52 одного или более цилиндров может приводиться в действие общим распределительным валом. Кроме того еще, в некоторых примерах, некоторые и впускных клапанов 52 и/или выпускных клапанов 54 могут приводиться в действие своим собственным независимым распределительным валом или другим устройством.
Двигатель 10 может включать в себя системы регулируемой установки фаз клапанного распределения (VVT), например, систему 80 регулируемой установки фаз кулачкового распределения (VCT). Система регулируемой установки фаз клапанного распределения может быть выполнена с возможностью открывать впускной клапан на первую продолжительность времени, а выпускной клапан на вторую продолжительность времени. Первая и вторая продолжительность времени может быть основана на условиях работы двигателя. В одном из примеров, первая и вторая продолжительности времени могут регулироваться на основании скорости вращения двигателя, температуры масла, запрошенного крутящего момента и имеющегося в распоряжении крутящего момента.
Система 80 VCT может быть сдвоенной независимой системой регулируемой установки фаз распределительного вала для изменения установки фаз распределения впускных клапанов и установки фаз распределения выпускных клапанов отдельно друг от друга. Система 80 VCT может включать в себя фазировщик распределительного вала для впускных клапанов, присоединенный к общему распределительному валу 65 для впускных клапанов для изменения установки фаз распределения впускных клапанов. Система VCT подобным образом может включать в себя фазировщик распределительного вала для выпускных клапанов, присоединенный к общему распределительному валу для выпускных клапанов для изменения установки фаз распределения выпускных клапанов. Система 80 VCT может быть выполнена с возможностью осуществлять опережение или запаздывание установки фаз клапанного распределения, осуществляя опережение или запаздывание установки фаз кулачкового распределения, и может управляться контроллером 12. Система 80 VCT может быть выполнена с возможностью регулировать установку фаз распределения событий открывания и закрывания клапанов, меняя зависимость между положением коленчатого вала и положением распределительного вала. Например, система 80 VCT может быть выполнена с возможность поворачивать распределительный вал 65 независимо от коленчатого вала, чтобы побуждать установку фаз клапанного распределения подвергаться опережению или запаздыванию. В некоторых примерах, контроллер 12 может осуществлять опережение или запаздывание установки фаз кулачкового распределения посредством системы 80 VCT посредством регулировки давления масла у фазировщиков кулачков с приводом от давления масла (OPA). Система 80 VCT может подавать давление масла на фазировщики кулачков OPA, в качестве примеров, посредством механического масляного насоса или посредством устройства с приводом от крутящего момента кулачка (CTA), выполненного с возможностью быстро менять установку фаз кулачкового распределения. В некоторых вариантах осуществления, установка фаз клапанного распределения, такая как закрывание впускного клапана (IVC) и закрывание выпускного клапана (EVC) может меняться посредством устройства непрерывно регулируемого подъема клапана (CVVL).
Устройства и системы управления клапанами/кулачками, описанные выше, могут быть с гидравлическим силовым приводом или с электроприводом, или их комбинацией. В одном из примеров, положение распределительного вала может изменяться посредством регулировки фаз кулачков электрического исполнительного механизма (например, фазировщика кулачков с электроприводом) с точностью воспроизведения, которая превышает таковую у большинства фазировщиков кулачков с гидравлическим приводом. Сигнальные шины могут отправлять сигналы управления в и принимать измерения установки фаз кулачкового распределения и/или выбора кулачка из системы 80 VCT.
Посредством регулировки системы 80 VCT, положение распределительного вала 65 для впускных клапанов может регулироваться, чтобы, тем самым, изменять установку момента открывания/или закрывания впускного клапана 52. По существу, посредством изменения открывания и закрывания впускного клапана 52, может меняться величина положительного перекрытия клапанов между впускным клапаном 52 и выпускным клапаном 54. Например, система 80 VCT может регулироваться, чтобы осуществлять опережение или запаздывание открывания и/или закрывания впускного клапана 52 относительно положения поршня. Система 80 VCT также может содержать датчик положения кулачка для выявления положения кулачка. Датчик положения кулачка также может определять скорость изменения положения кулачка, по которой может определяться направление перемещения кулачка. Например, датчик положения кулачка может определять, является ли кулачок перемещающимся в направлении нового положения кулачка (например, от заштифтованного положения по умолчанию) или в направлении заштифтованного положения по умолчанию (например, от нового положения кулачка). Более того, датчик положения кулачка может быть способным выявлять положение многочисленных кулачков, так чтобы могла определяться степень синхронизации между многочисленными кулачками. Например, посредством измерения мгновенных положений кулачков и/или скоростей изменения положений кулачков, датчик положения кулачка может определять степень синхронизации между многочисленными кулачками.
Во время работы двигателя, поршень цилиндра постепенно перемещается вниз от ВМТ, доходя до самой нижней точки в НМТ к концу рабочего такта. Поршень затем возвращается вверх, в ВМТ, к концу такта выпуска. Поршень затем вновь перемещается обратно вниз, по направлению к НМТ, в течение такта впуска, возвращаясь в свое исходное верхнее положение в ВМТ к концу такта сжатия. Во время сгорания в цилиндре, выпускной клапан может открываться как только поршень доходит до нижней точки в конце рабочего такта. Выпускной клапан затем может закрываться, в то время как поршень завершает такт выпуска, оставаясь открытым по меньшей мере до тех пор, пока не начался следующий такт впуска. Таким же образом, впускной клапан может открываться в или раньше начала такта впуска и может оставаться открытым по меньшей мере до тех пор, пока не начался следующий такт сжатия.
На основании разности установок моментов между закрыванием выпускного клапана и открыванием впускного клапана, клапаны могут приводиться в действие с отрицательным перекрытием клапана, при этом в течение короткой продолжительности времени после окончания такта выпуска и до начала такта впуска, оба, впускной и выпускной клапаны, закрыты. Этот период, в течение которого оба клапана закрыты, указывается ссылкой как отрицательное перекрытие (с впускного на выпускной) клапанов. В одном из примеров, система VCT может регулироваться, так что установка фаз распределения отрицательного перекрытие, с впускного на выпускной, клапанов может быть установленным по умолчанием положением распределительного вала двигателя во время сгорания в цилиндре.
В качестве альтернативы, клапаны могут приводиться в действие с положительным перекрытием клапанов, при этом в течение короткой продолжительностью времени до окончания такта выпуска и после начала такта впуска, оба, впускной и выпускной, клапаны, могут быть открыты. Этот период, в течение которого оба клапана могут быть открыты, указывается ссылкой как положительное перекрытие (с впускного на выпускной) клапанов. Как конкретизировано в материалах настоящего описания, система 80 VCT может регулироваться, так чтобы увеличивалась величина положительного перекрытия клапанов во время выбранных условий работы двигателя более точно, положение распределительного вала для впускных клапанов может регулироваться, чтобы установка момента открывания впускного клапана подвергалась опережению. Следовательно, впускной клапан может открываться раньше, до окончания такта выпуска. По существу, продолжительность времени, в течение которой оба клапана открыты, может увеличиваться, тем самым, приводя к увеличенному положительному перекрытию клапанов. В качестве одного из примеров, положительное перекрытие клапанов может увеличиваться посредством перемещения распределительного вала для впускных клапанов из положения некоторого положительного перекрытия клапанов в положение, имеющее большее положительное перекрытие клапанов. В качестве еще одного примера, положительное перекрытие клапанов может увеличиваться посредством перемещения распределительного вала для впускных клапанов из положения некоторого отрицательного перекрытия клапанов в положение положительного перекрытия клапанов. В одном из примеров, система VCT может регулироваться, так что установка фаз распределения отрицательного перекрытие, с впускного на выпускной, клапанов может быть установленным по умолчанием положением распределительного вала двигателя во время холодного запуска двигателя.
Следует принимать во внимание, что, несмотря на то, что приведенный выше пример предлагает увеличение положительного перекрытия клапанов посредством осуществления опережения установки момента открывания впуска, в альтернативных примерах, положительное перекрытие клапанов может увеличиваться посредством регулировки распределительного вала для выпускных клапанов, чтобы осуществлять запаздывание закрывания выпускного клапана. Кроме того еще, каждый из распределительных валов для впускных и выпускных клапанов может регулироваться, чтобы менять положительное перекрытие клапанов, изменяя установки фаз распределения как впускных, так и выпускных клапанов.
Фиг. 1 также показывает контроллер 12, который может быть любой электронной системой управления транспортного средства, в котором установлен двигатель 10. В вариантах осуществления, где по меньшей мере один впускной или выпускной клапан выполнен с возможностью открываться и закрываться согласно регулируемой установке фаз распределения, регулируемая установка фаз распределения может управляться посредством электронной системы управления, чтобы регулировать количество выхлопных газов, присутствующих в камере сгорания во время воспламенения. Например, положительное перекрытие клапанов может увеличиваться, чтобы удалять выхлопные газы из цилиндров двигателя.
Электронная система управления также может быть выполнена с возможностью давать команду открывания, закрывания и/или регулировки различных других клапанов с электронным приводом в двигателе 10, как необходимо для ввода в действие любой из функций управления, описанных в материале настоящего описания. Эти клапаны, например, могут включать в себя дроссельные клапаны, перепускные клапаны компрессоров, перепускные заслонки для выхлопных газов, клапаны EGR и отсечные клапаны, различные входные и выходные клапаны резервуаров. Контроллер также может регулировать количество топлива, а также временные характеристики впрыска, топливных форсунок. По существу, контроллер может регулировать систему VCT и топливно-воздушное соотношение. Кроме того, для оценки условий работы в связи с функциями управления двигателя 10, контроллер может быть оперативно присоединен к множеству датчиков, расположенных повсюду в двигателе 10. Таковые могут включать в себя датчики расхода, датчики температуры, датчики положения педали, датчики давления, датчик массового расхода воздуха, и т.д. Более точно, датчик 134 положения педали показан присоединенным к педали 130 акселератора для считывания силы, приложенной водителем 132 транспортного средства. Контроллер 12 может использовать данные с этих различных датчиков для оценки других условий работы двигателя.
Далее, с обращением к фиг. 7, она иллюстрирует упрощенную схему, показывающую масляные протоки (стрелки сплошных линий) в системе 600 двигателя для управления изменением положения кулачков для двигателя, включающего в себя WT. Система 600 двигателя включает в себя контроллер 12, узел 610 распределительного вала, узел 620 коленчатого вала, масляный поддон 630 и головку 64 0 блока цилиндров двигателя. Узел 610 распределительного вала включает в себя распределительный вал (в том числе, распределительные валы для впускных и выпускных клапанов) и кулачки ОРА, включающие в себя приводы регулируемой установки фаз кулачкового распределения. Узел 620 коленчатого вала присоединен к узлу распределительного вала через ремень или цепь 616. Масло из масляного поддона 630 прокачивается посредством масляного насоса 660, через масляный фильтр 650 в головку 640 блока цилиндров двигателя. Клапан 646 управления маслом (OCV) управляется контроллером 12, чтобы подавать и/или отводить масло из приводов кулачков OPA для осуществления опережения или запаздывания установки фаз распределения кулачков в узле 610 распределительного вала. По выбору, запорный клапан (не показан) может быть включен в состав между узлом 610 распределительного вала и OCV 646, чтобы предотвращать независимый обратный поток масла из кулачков в головку блока цилиндров двигателя и последующее перемещение кулачков, когда давление масла является низким. Масло из головки 640 блока цилиндров двигателя стекает обратно в масляный поддон 630. Более того, масляный насос 660 может быть масляным насосом переменного объема в системе регулируемого давления масла, и контроллер 12 может управлять отдачей масляного насоса 660, чтобы повышать или понижать давление масла.
Давление масла может меняться в зависимости от нескольких факторов. Давление масла может меняться в зависимости от вязкости масла, которая сама может зависеть от температуры масла (например, вязкость масла повышается по мере того, как снижается температура масла). Более того, давление масла может повышаться посредством повышения скорости работы масляного насоса, которая может быть пропорциональна скорости вращения двигателя, и посредством увеличения рабочего объема масляного насоса. Кроме того еще, давление масла может снижаться с повышением утечки масла, которая может меняться в зависимости от производственных допусков и износа двигателя, и с повышением потребления масла вспомогательными устройствами, такими как устройства (например, разбрызгиватели масла поршней), подающие масло для смазки поршней. Таким образом, давление масла может логически выводиться на основании одного из или комбинации температуры масла, скорости вращения двигателя, рабочего объема масляного насоса и состояния потребляющих масло устройств в системе.
Контроллер 12 может работать некоторым образом с обратной связью в отношении управления изменением положением кулачков, подвергая работе OCV для изменения положения (например, осуществления опережения или запаздывания) кулачков на основании давления масла. Давление масла может логически выводиться по температуре масла, которая измеряется с использованием датчика 684 температуры масла. По выбору, давление масла может указываться датчиком давления масла, расположенным в соответствии с масляным протоком двигателя. Управление с обратной связью кулачками OPA может быть пригодным, когда температура масла находится ниже пороговой температуры, давление масла может быть достаточно высоким, чтобы гарантировать стабильное и способное к реагированию изменение положения кулачков. В качестве альтернативы, контроллер 12 может работать некоторым образом с обратной связью в отношении управления изменением положения кулачков, определяя положения кулачков по одному или более датчиков 686 угла поворота кулачка. Положение коленчатого вала дополнительно может определяться по датчику 682 угла поворота коленчатого вала, а нагрузка двигателя может определяться по датчику 680. В качестве примера, датчик 680 может логически выводить нагрузку двигателя, измеряя уровни кислорода на впуске. Посредством определения положений кулачков на временном интервале, контроллер 12 может определять направление перемещения кулачка, например, движется ли кулачок от или в направлении заштифтованного положения кулачка по умолчанию. Более того, контроллер 12 может определять, перемещается ли кулачок стабильным образом, не меняя направление. В качестве примера, контроллер 12 может включать в себя диагностику кулачков, которая выявляет, соответствуют ли командные положения кулачков контроллера и командные скорости кулачков контроллера фактическим положениям кулачков и фактическим скоростям кулачков соответственно. Кроме того еще, контроллер 12 может определять, перемещаются ли многочисленные кулачки синхронно друг относительно друга, является ли их синхронизация повышающейся или понижающейся, и находятся ли они в синхронизации в пределах или за пределами порогового значения синхронизации кулачков. Кроме того еще, контроллер 12 может определять скорость изменения синхронизации между многочисленными кулачками. Соответственно, мгновенные и совокупные измерения положений кулачков по одному или более кулачков могут вводиться в контроллер 12 и использоваться для расчета действий управления с обратной связью для выполнения управления изменением положения кулачков. В одном из примеров, когда давление масла является низким (например, вследствие высоких температур масла), диагностика кулачков контроллером может выявлять ухудшенное управление кулачками (например, фактические скорости и положения кулачков не соответствуют командным скоростям и положениям кулачков контроллера). По существу, контроллер может деактивировать управление кулачками, возвращая положения кулачков в заштифтованные или фиксирующие положения по умолчанию, чтобы поддерживать ездовые качества.
В типичных условиях движения, когда скорость вращения двигателя находится выше пороговой скорости вращения двигателя (например, низкой скорости вращения холостого хода), где температура масла находится ниже пороговой температуры масла (например, нет избыточного нагрева масла), и нагрузка может быть ниже пороговой нагрузки, контроллер 12 регулирует установку фаз кулачкового распределения посредством системы 80 VCT в ответ на запрошенный крутящий момент и запрошенную скорость транспортного средства. В качестве примера, запрошенная скорость транспортного средства и запрошенный крутящий момент могут указываться положением педали 130 акселератора. Более того, по мере того, как скорость транспортного средства и запрошенный крутящий момент возрастают, установка фаз кулачкового распределения может регулироваться, так чтобы впускные клапаны оставались открытыми в течение более продолжительных длительностей, чтобы увеличивать впуск воздуха в двигатель. В качестве примера, закрывание впускного клапана может подвергаться запаздыванию на более высоких скоростях транспортного средства. Во время этих типичных условий движения, давление масла логически выводится по температуре масла (или измеряется непосредственно), и давление масла является достаточным для надежного управления и изменения положения кулачков, чтобы регулировать установку фаз кулачкового распределения и чтобы выдавать запрошенный крутящий момент (например, имеющийся в распоряжении крутящий момент точно соответствует запрошенному крутящему моменту). По существу, во время этих типичных условий движения, установка фаз кулачкового распределения регулируется способом без обратной связи на основании логически выведенного давления масла и независимо от имеющегося в распоряжении крутящего момента.
С другой стороны, контроллер 12 может ограничивать перемещение кулачков и ограничивать регулировку установки фаз кулачкового распределения в первом состоянии движения. Например, регулировка установки фаз кулачкового распределения может ограничиваться в ответ на условия избыточного нагрева масла (например, температуру масла, большую, чем пороговая температура масла) и пониженные скорости вращения двигателя (например, ниже пороговой скорости вращения двигателя). Регулировка установки фаз кулачкового распределения также может ограничиваться в ответ на повышенные нагрузки (например, нагрузку, большую чем пороговая нагрузка). Во время этих условий, логически выведенное давление масла снижается (например, вследствие высоких температур масла), и управление установкой фаз кулачкового распределения может быть ненадежным. Например, вследствие низкого давления масла, установка фаз кулачкового распределения может изменяться медленно, кулачки могут двигаться несинхронно, и положения кулачков могут перемещаться нестабильно, раскачиваясь в направлении к и от требуемого положения. Как результат, во время условий избыточного нагрева масла и пониженных скоростей вращения двигателя (и повышенных нагрузок выше пороговой нагрузки), имеющийся в распоряжении крутящий момент может быть недостаточным для удовлетворения запрошенного крутящего момента. Однако, несмотря на имеющийся в распоряжении крутящий момент, являющийся недостаточным для обеспечения требуемого крутящего момента, регулировка установки фаз кулачкового распределения может ограничиваться, чтобы поддерживать ездовые качества транспортного средства, работоспособность транспортного средства, экономию топлива и выбросы транспортного средства. Ограничение регулировки установки фаз кулачкового распределения или ограничение перемещения кулачков могут включать в себя пришпиливание кулачков к их положениям кулачков по умолчанию. Более того, во время избыточного нагрева масла, давление масла может быть не достаточным для отшпиливания кулачков с их заштифтованных положений по умолчанию.
Во втором состоянии, когда запрошенный крутящий момент далеко превышает имеющийся в распоряжении крутящий момент (например, запрошенный крутящий момент превышает имеющийся в распоряжении крутящий момент сверх пороговой разности крутящих моментов), контроллер 12 может отменять пределы регулировки установки фаз кулачкового распределения. Например, если транспортное средство остановлено, и имеющийся в распоряжении крутящий момент недостаточен для пуска в ход транспортного средства или для работы привода вспомогательных устройств передней части, пределы регулировки установки фаз кулачкового распределения могут отменяться. В этом случае, так как транспортное средство обездвижено, поддержание ездовых качеств транспортного средства, работоспособности транспортного средства, экономии топлива и выбросов транспортного средства становится вторичным по отношению к пуску в ход транспортного средства (или работы привода вспомогательных устройств передней части). Таким образом, контроллер 12 может продолжать регулировку установки фаз кулачкового распределения, чтобы повышать имеющийся в распоряжении крутящий момент, несмотря на медленное реагирование кулачков, несинхронное изменение положения кулачков и нестабильное изменение положения кулачков. Более того, наряду с отменой пределов регулировки установки фаз кулачкового распределения, управление положением кулачков может больше не происходить без обратной связи на основании логически выведенного давления масла, но может происходить с обратной связью, контроллер 12 определяет управляющие воздействия на положение кулачков на основании измерений положений кулачков, скорости изменения положения кулачков, синхронизации кулачков, направления движения кулачков относительно требуемого положения или заштифтованного положения по умолчанию, стабильности изменения положения кулачков, и тому подобного. Управление с обратной связью положением кулачков также может включать в себя осуществление задержки более быстрых кулачков, чтобы улучшать синхронизацию с более медленными кулачками.
Соответственно, во время типичных условий движения, контроллер 12 не ограничивает регулировку установки фаз кулачкового распределения, и установка фаз кулачкового распределения управляется способом без обратной связи на основании логически выведенного давления масла, давление масла является достаточным для надежного управления положениями кулачков. Более того, в первом состоянии, в ответ на перегрев масла и повышенные нагрузки, контроллер 12 может ограничивать перемещение кулачков. Во втором состоянии, когда имеющийся в распоряжении крутящий момент недостаточен для выдачи запрошенного крутящего момента (например, для пуска в ход транспортного средства), контроллер 12 может отменять ограничения перемещения кулачков и управлять установкой фаз кулачкового распределения способом с обратной связью на основании положения кулачков, скоростей изменения положения кулачков, и тому подобного. По выходу из второго состояния, контроллер 12 возвращается к управлению установкой фаз клапанного распределения без обратной связи, чтобы поддерживать ездовые качества и работоспособность транспортного средства.
Таким образом, транспортное средство может содержать двигатель, кулачок с приводом от давления масла, и контроллер с исполняемыми командами для, в первом состоянии движения транспортного средства, регулировки установки фаз кулачкового распределения в ответ на запрошенный крутящий момент и запрошенную скорость транспортного средства, но независимо от имеющегося в распоряжении крутящего момента, и ограничение регулировки установки фаз кулачкового распределения в ответ на перегрев масла при повышенных нагрузках, и во втором состоянии, следующем за первым состоянием, отмену ограничения регулировки установки фаз кулачкового распределения в ответ на имеющийся в распоряжении крутящий момент, являющийся недостаточным для удовлетворения запрошенного крутящего момента.
Далее, с обращением к фиг. 2, она иллюстрирует блок-схему последовательности операций способа 200 изменения положения кулачков в ответ на первое состояние и второе состояние. Способ 200 может использоваться для изменения положения впускных кулачков, изменения положения выпускных кулачков или пригодной их комбинации. Способ 200 начинается на этапе 210, где он оценивает и/или измеряет условия работы транспортного средства, такие как температура масла (Toil), имеющийся в распоряжении крутящий момент (Tqavail), запрошенный крутящий момент (Tqreq), давление масла (Poil), скорость вращения двигателя (скорость вращения в минуту двигателя), нагрузку, синхронизацию кулачков, перекрытие клапанов, топливно-воздушное соотношение, скорость транспортного средства, и тому подобное. Датчик 134 положения педали акселератора и скорость вращения ведущего колеса могут использоваться для указания Tqreq и Tqavail, соответственно. Затем, на этапе 230, способ 200 определяет, удовлетворено ли первое состояние. Poil может включать в себя давление масла на приводе кулачка OPA.
Определение, удовлетворено ли первое состояние, оценивается способом 300 по фиг. 3A. Способ 300 начинается на этапе 310, где определяется, является ли температура масла большей, чем пороговая температура масла, Toil,TH. В качестве примера, пороговая температура масла, Toil,TH, может определяться заранее на основании индекса вязкости масла и может соответствовать температуре, выше которой давление масла падает ниже первого порогового давления масла, Poil,TH1. Таким образом, давление масла может логически выводиться по температуре масла и/или скорости вращения двигателя. В качестве альтернативы, вместо логического вывода давления масла по температуре масла, на этапе 320, способ 300 может определять, является ли давление масла меньшим, чем первое пороговое давление масла, Poil,TH1. Ниже Poil,TH1, надежность изменения положения кулачков может снижаться, и изменение положения кулачков может ограничиваться или частично ограничиваться, чтобы поддерживать ездовые качества транспортного средства, работоспособность транспортного средства, экономию топлива, выбросы транспортного средства, и тому подобное.
Если температура масла больше, чем пороговая температура масла (в качестве альтернативы, если давление масла меньше, чем пороговое давление масла), способ 300 переходит на этап 312, где определяется, является ли двигатель работающим на повышенной нагрузке. Например, двигатель может быть работающим на повышенной нагрузке, если нагрузка больше, чем пороговая нагрузка, LoadTH. Пороговая нагрузка может соответствовать нагрузке, большей чем нагрузка в типичных условиях работы, такой как буксировка тяжелого прицепа вверх по затяжному склону.
Если нагрузка больше, чем пороговая нагрузка, первое состояние удовлетворено на этапе 314, и способ 300 возвращается в способ 200 на этап 230, откуда он начинался. Если Toil < Toil,TH на этапе 310, или нагрузка < LoadTH на этапе 312, то первое состояние не удовлетворено на этапе 316, и способ 300 возвращается в способ 200 на этап 230, откуда он начинался.
Возвращаясь к способу 200 на этап 230, если удовлетворено первое состояние, то способ 200 переходит на этап 232, где ограничивается перемещение кулачков. Ограничение перемещения кулачков может содержать ограничение регулировок установки фаз кулачкового распределения, поскольку логически выведенное давление масла является низким, а изменение положения кулачков может быть низким, нестабильным или ненадежным в других отношениях. Например, положения кулачков могут пришпиливаться в заштифтованных положениях кулачков по умолчанию, чтобы поддерживать ездовые качества, работоспособность транспортного средства, выбросы, экономию топлива транспортного средства, и тому подобное. После этапа 232, способ 200 переходит на этап 236, где он определяет, удовлетворено ли второе состояние.
Определение, удовлетворено ли второе состояние, оценивается способом 302 по фиг. 4. Способ 302 начинается на этапе 320, где определяется, является ли скорость вращения двигателя меньшей, чем пороговая скорость вращения двигателя, rpmTH двигателя. В качестве примера, пороговая скорость вращения двигателя может соответствовать скорости вращения двигателя при пробуксовке. Скорость вращения холостого хода двигателя соответствует скорости вращения двигателя, которую двигатель может набирать, когда транспортное средство остановлено, при этом гидротрансформатор сдерживает скорость вращения двигателя. На скорости вращения двигателя при пробуксовке, крутящий момент двигателя и крутящий момент гидротрансформатора стороны двигателя уравновешены. Тугой гидротрансформатор (например, с низким коэффициентом K) предохраняет скорость вращения двигателя от достижения существенных скоростей вращения двигателя и может удерживать двигатель от наращивания крутящего момента, когда транспортное средство остановлено. Например, если скорость вращения двигателя при пробуксовке находится ниже 700 оборотов в минуту или ниже 1000 оборотов в минуту, двигатель может удерживаться от наращивания существенного крутящего момента. Посредством повышения крутящего момента на низкой скорости вращения, может повышаться скорость вращения двигателя при пробуксовке. В качестве альтернативы, на этапе 320, способ 302 может определять, остановлено ли транспортное средство, и rpmTH двигателя может соответствовать скорости вращения двигателя, когда транспортное средство остановлено (например, скорость транспортного средства имеет значение 0). Если скорость вращения двигателя меньше, чем rpm,TH двигателя, в условиях тяжелой нагрузки (например, пуска в ход транспортного средства, буксирующего тяжелый груз), двигатель может не быть способным выдавать достаточный крутящий момент до пробуксовки.
Если скорость вращения в минуту двигателя меньше, чем rpm,TH двигателя, способ 302 переходит на этап 330, где он определяет, является ли разность между запрошенным крутящим моментом, Tqreq, и имеющимся в распоряжении крутящим моментом, Tqavail, большей, чем пороговая разность, ΔTqTH, крутящих моментов. Пороговая разность крутящих моментов может указываться положением педали 130 акселератора 130 (PP) и скоростью транспортного средства или скоростью вращения ведущего колеса. Например, если педаль 130 акселератора полностью нажата (например, Tqreq велик), и скорость транспортного средства неподвижна, или скорость вращения ведущего колеса является нулевой (например, Tqavail очень мал), то пороговая разность крутящих моментов может быть большой, превышающей ΔTqTH.
Если разность между запрошенным крутящим моментом, Tqreq, и имеющимся в распоряжении крутящим моментом, Tqavail, больше, чем пороговая разность крутящих моментов, TqTH, способ 302 переходит на этап 340, где он определяет, является ли Tqavail меньшим, чем пороговый крутящий момент, Tq,TH. Пороговый крутящий момент может приблизительно соответствовать крутящему моменту двигателя на скорости вращения двигателя при пробуксовке. На скорости вращения двигателя при пробуксовке, крутящий момент двигателя может зависеть от скорости вращения насосного колеса гидротрансформатора, которая уравновешена со скоростью вращения двигателя при пробуксовке. Например, коэффициент k гидротрансформатора соотносит крутящий момент двигателя с квадратом скорости вращения двигателя, и TqTH может соответствовать квадрату скорости вращения двигателя, умноженному на коэффициент k. Если имеющийся в распоряжении крутящий момент меньше, чем пороговый крутящий момент, второе состояние удовлетворено на этапе 350, и способ 300 возвращается в способ 200 на этапе 236
Если скорость вращения в минуту двигателя не меньше, чем rpmTH двигателя на этапе 312, если Tqreq-Tqavail меньше, чем TqTH, на этапе 330, или если Tqavail больше, чем TqTH, на этапе 340, способ 300 определяет на этапе 360, что второе состояние не удовлетворено, и способ 300 возвращается в способ 200 на этап 236. Другими словами, модуль управления силовой передачей не отменяет основанную на давлении масла стратегию управления изменением положения кулачков контроллера 12.
Возвращаясь к способу 200 на этапе 230, если удовлетворено первое состояние, способ 200 переходит на этап 240, где он определяет, надежно ли изменение положения кулачков. Надежность изменения положения кулачков определяется согласно способу 400 на фиг. 5. Если второе состояние не удовлетворено на этапе 236, способ 200 заканчивается.
С обращением к фиг. 5, способ 400 начинается на этапе 410, где он определяет, является ли Poil большим, чем второе пороговое давление масла (Poil,TH2) - Poil,TH2 может соответствовать давлению масла, достаточно высокому, чтобы разблокировать штифт положения по умолчанию кулачков ОРА. Например, Poil,TH2 может иметь значение 3 фунта на квадратный дюйм. В других случаях, Poil,TH2 может иметь значение 6, 8 или 10 фунтов на квадратный дюйм в зависимости от транспортного средства. Poil,TH2 может быть более низким, чем Poil,TH2. Соответственно, если Poil находится выше, чем Poil,TH2, но ниже, чем Poil,TH1, управляемость изменения положения кулачков может понижаться. Если Poil меньше, чем Poil,TH1, штифты положения по умолчанию кулачков ОРА могут не разблокироваться, и кулачки могут не изменить положения.
На этапах 420, 430 и 440, способ 400 оценивает надежность управления позиционированием кулачков на основании самой управляемости кулачков. Другими словами, реакция положений кулачков на контроллер 12 оценивается для определения надежности изменения положения кулачков. В качестве примеров, способность к реагированию изменения положения кулачков на команды изменения положения кулачков контроллера может указываться перемещением кулачка из заштифтованного положения по умолчанию, кулачки перемещаются в пределах порогового значения синхронизации кулачков, и кулачок перемещается стабильно в направлении нового положения. В качестве примера, пороговое значение синхронизации кулачков может иметь значение шесть градусов синхронизации между многочисленными кулачками. Эти индикаторы способности к реагированию изменения положения кулачков (например, управляемости кулачков) могут измеряться датчиком положения кулачков системы 80 VCT.
Возвращаясь к способу 400, на этапе 410, если давление масла больше, чем пороговое давление масла, способ 400 переходит на этап 420. На этапе 420, способ 400 определяет, может ли кулачок перемещаться из заштифтованного положения. В качестве примера, контроллер 12 может передавать сигнал на один или более кулачков 67 через систему 80 регулируемой установки фаз кулачкового распределения, чтобы определять, перемещаются ли один или более кулачков из заштифтованного положения по умолчанию. В качестве дополнительного примера, перемещение кулачков из заштифтованного положения может содержать скорость изменения положения кулачков из заштифтованного положения, являющуюся большей, чем пороговая скорость изменения положения кулачков, и пороговая скорость изменения положения кулачков может быть установлена в 30 CA/с, при этом CA/с представляет градусы угла поворота коленчатого вала/с. Когда скорость изменения положения кулачков меньше, чем 30 CA/s, управляемость кулачков и изменение положения из заштифтованного положения могут быть ненадежными. Если кулачок перемещается из положения по умолчанию, способ 400 переходит на этап 430.
На этапе 430, способ 400 определяет, перемещаются ли кулачки синхронно в пределах порогового значения синхронизации кулачков. Синхронное перемещение кулачков может включать в себя обладание разностями фазовых углов кулачков между многочисленными кулачками в пределах порогового значения синхронизации кулачков. В одном из примеров, на этапе 430, пороговое значение синхронизации кулачков может иметь значение шесть градусов, и способ 400 может определять, перемещаются ли кулачки в пределах шести градусов синхронизации. Датчик положения кулачков системы 80 VCT может использоваться для измерения синхронизации кулачков. Перемещение кулачков в пределах порогового значения синхронизации кулачков может быть указанием, что кулачки могут изменить положение надежно. В качестве примера, если перемещение кулачков не находится в пределах порогового значения синхронизации кулачков, когда кулачки изменяют положение, рабочие характеристики двигателя (например, плавная работа двигателя) могут понижаться, а имеющийся в распоряжении крутящий момент может не повышаться. Таким образом, изменение положения кулачков, когда синхронизация кулачков не находится в пределах порогового значения синхронизации кулачков, может не содействовать обеспечению повышенного имеющегося в распоряжении крутящего момента.
Кулачки могут быть перемещающимися в пределах порогового значения синхронизации, когда один или более кулачков перемещаются быстрее, чем один или более других кулачков. Например, в V-образном двигателе, при перепозиционировании кулачков, кулачки первого ряда цилиндров могут перемещаться с более высокой скоростью, тем самым осуществляя опережение с более быстрой скоростью, чем другие кулачки ряда цилиндров. Если, на этапе 430, перемещение кулачка не находится в пределах порогового значения синхронизации кулачков, способ 400 переходит на этап 436, где контроллер 12 может понижать скорость перемещения кулачка у более быстрых кулачков для уменьшения рассинхронизации (например, уменьшать разности фазовых углов кулачков) при перемещении кулачков. В качестве альтернативы, контроллер 12 может перемещать медленнее осуществляющие опережение кулачки первыми. Таким образом, контроллер 12 может выполнять стратегию управления изменением положения кулачков с обратной связью скорее на основании разности положения между кулачками, нежели на основании абсолютного положения кулачков, чтобы синхронизировать перемещение кулачков. В качестве дополнительного примера, диагностика кулачков контроллером 12 может условно деактивироваться во втором состоянии, чтобы давать повышенный имеющийся в распоряжении крутящий момент, несмотря на возможное снижение ездовых качеств, экономии топлива, повышение выбросов, и так далее. Например, несмотря на неидеальное управление позиционированием (например, фактические положения и скорости кулачков, не соответствующие командным положениям и скоростям кулачков), кулачки могут изменить положение для повышения коэффициента наполнения двигателя и крутящего момента, чтобы пускать в ход обездвиженное транспортное средство. Более того, способ 400 выполняет изменение положения кулачков (например, перемещение кулачков), чтобы повышать имеющийся в распоряжении крутящий момент, даже если скорость изменения положения кулачков может уменьшаться. Другими словами, во втором состоянии, контроллер отдает приоритет увеличению перемещения кулачка над повышением или сохранением скорости перемещения кулачка и управляемостью кулачка. После 436, способ 400 возвращается на этап 430, чтобы определять, синхронизированы ли кулачки в пределах порогового значения синхронизации.
Если кулачки могут синхронно перемещаться в пределах порогового значения синхронизации, способ 400 переходит на этап 440, где определяется, стабильно ли перемещается кулачок в новое положение. В качестве примера, стабильное перемещение кулачка может включать в себя кулачок, монотонно перемещающийся из заштифтованного положения по умолчанию в новое положение кулачка. Более того, если перемещение кулачка колеблется между перемещением из заштифтованного положения по умолчанию в новое положение кулачка и перемещением обратно в направлении заштифтованного положения по умолчанию (например, перемещением из нового положения кулачка), перемещение кулачка не является монотонным, и кулачок не перемещается стабильно в направлении нового положения кулачка. Например, когда давление масла находится возле или слегка выше, чем Poil,TH2, перемещение кулачков в ответ на управление изменением положения кулачков может значительно колебаться, несмотря на давление масла, являющееся достаточно высоким, чтобы перемещать кулачки из заштифтованных положений по умолчанию. Более того, на низких давлениях масла около Poil,TH2, пульсация крутящего момента кулачка может вызывать колебания давления масла, которые являются более высокими по амплитуде, чем давление масла подачи у кулачков OPA. В качестве дополнительного примера, стабильное перемещение кулачков может включать в себя способность системы VCT управлять положением кулачка в пределах 2 градусов угла поворота кривошипа от заданного значения регулируемой величины управления с обратной связью. Когда положение кулачка не может регулироваться в пределах 2 градусов угла поворота кривошипа от заданного значения регулируемой величины с обратной связью, перемещение кулачка может быть нестабильным.
По определению, что один или более кулачков стабильно перемещаются в направлении нового положения, способ 400 переходит на этап 450, где способ 400 определяет, что изменение положения кулачков является надежным. Таким образом, во втором состоянии, контроллер 12 может продолжаться, чтобы изменить положение кулачков для повышения имеющегося в распоряжении крутящего момента, когда управляемость кулачков, в том числе, пониженные скорости изменения положения кулачков, может быть пониженной.
Если давление масла меньше, чем второе пороговое значение масла на этапе 410, кулачки не перемещаются из заштифтованного положения по умолчанию на этапе 420, или кулачки не перемещаются стабильно в направлении нового положения на этапе 440, способ 400 определяет, что позиционирование кулачков является ненадежным на этапе 460. После этапов 450 и 460, способ 400 возвращается к способу 200 на этап 240.
На этапе 240, если позиционирование кулачков является надежным, способ 300 переходит на этап 250, где изменение положения кулачков продолжается. Таким образом, во втором состоянии, управление изменением положения кулачков отдает приоритет увеличению перемещения кулачка над управляемостью кулачка (например, скоростью изменения положения кулачка), чтобы повышать имеющийся в распоряжении крутящий момент, когда имеющийся в распоряжении крутящий момент меньше, чем запрошенный крутящий момент на большую, чем пороговая, разность крутящих моментов (например, недобранный крутящий момент для пуска в ход транспортного средства). Более того, быстрее движущиеся кулачки могут замедляться, чтобы синхронизировать перемещение кулачков в пределах порогового значения синхронизации. Соответственно, управление изменением положения кулачков основано на схеме управления с обратной связью посредством индикаторов управляемости кулачков вместо стратегии управления без обратной связи с использованием давления масла или логически выведенного давления масла для указания управляемости кулачков.
Изменение положения кулачков может содержать осуществление опережения впускного кулачка для уменьшения позднего закрывания впускного клапана и повышения имеющегося в распоряжении крутящего момента, регулировку выпускного кулачка для уменьшения перекрытия клапанов, и тому подобное. Дополнительно, управление изменением положения кулачков может дополнительно изменить положение кулачков для повышения разрежения на впуске, чтобы повышать имеющийся в распоряжении крутящий момент, когда удовлетворено второе состояние. Разрежение на впуске может измеряться датчиком MAP в качестве примера. Более того, использование изменения положения кулачков для уменьшения нехватки разрежения на впуске может уменьшать или предотвращать использование вакуумных насосов в двигателях с VCT, улучшая экономию топлива и/или снижая затраты на производство.
Возвращаясь на этап 240, если позиционирование кулачков не является надежным, то кулачки определяются неуправляемыми, и кулачки возвращаются в заштифтованное положение по умолчанию. После этапов 250 и 256, способ 200 переходит на этап 260, где предпринимаются дополнительные действия для повышения имеющегося в распоряжении крутящего момента у двигателя. Например, осуществление опережения установки момента зажигания до установки момента максимального тормозного момента (MBT) может повышать имеющийся в распоряжении крутящий момент посредством синхронизации зажигания топлива с движением поршня для уменьшения насосных потерь, но понижать ездовые качества. В качестве дополнительного примера, отключение генератора переменного тока, отсоединение компрессора кондиционирования воздуха, выключение вспомогательных электрических нагрузок или их комбинация могут выполняться для повышения имеющегося в распоряжении крутящего момента от двигателя наряду с уменьшением комфорта пассажиров. В качестве дополнительного примера, отдача масляного насоса может повышаться, и/или охлаждение моторного масла может увеличиваться для обеспечения более высокого давления масла, которое может повышать крутящий момент, повышая управляемость кулачков. Более того, богатая топливно-воздушная смесь может подаваться в двигатель, чтобы повышать имеющийся в распоряжении крутящий момент, несмотря на снижение экономии топлива и повышение выбросов. Таким образом, способ 200 может выполнять дополнительные действия для повышения имеющегося в распоряжении крутящего момента во втором состоянии, несмотря на снижение экономии топлива, ездовых качеств и комфорта пассажиров, а также повышения выбросов. Таким образом, повышению имеющегося в распоряжении крутящего момента моментально отдается приоритет над экономией топлива, управляемостью кулачков, ездовыми качествами, выбросами и комфортом пассажира в ответ на второе состояние. Как результат, в тех случаях, когда транспортное средство может быть обездвижено или неспособным эксплуатировать привод вспомогательных устройств передней части, имеющиеся в распоряжении крутящий момент и/или разрежение могут повышаться для пуска в ход транспортного средства или работы привода вспомогательных устройств передней части. Так как повышению имеющегося в распоряжении крутящего момента отдается приоритет моментально во втором состоянии, в целом (например, во всех условиях движения транспортного средства), экономия топлива транспортного средства, управляемость кулачков, ездовые качества, выбросы и комфорт пассажиров по-прежнему могут поддерживаться наряду с сохранением затрат на производство транспортного средства и сложности производства транспортного средства. После этапа 260, способ 200 заканчивается.
Таким образом, способ может содержать, в ответ на давление масла ниже порогового давления масла и скорость вращения двигателя ниже порогового скорости вращения двигателя, ограничение перемещения кулачков при движении транспортного средства, а в остановленном состоянии транспортного средства, отмену ограничения перемещения кулачков. Способ дополнительно может содержать, в остановленном состоянии транспортного средства, отмену ограничения перемещения кулачков для повышения имеющегося в распоряжении крутящего момента в ответ на имеющийся в распоряжении крутящий момент, являющийся недостаточным для пуска в ход транспортного средства, и деактивацию диагностики управления позиционированием кулачков.
Остановленное состояние транспортного средства может содержать перегрев масла и нагрузку выше пороговой нагрузки. Более того, в остановленном состоянии транспортного средства, отмена ограниченного перемещения кулачков для повышения имеющегося в распоряжении крутящего момента может происходить в ответ на имеющийся в распоряжении крутящий момент, являющийся недостаточным для работы привода вспомогательных устройств передней части.
Способ дополнительно может содержать, в остановленном состоянии транспортного средства, отмену ограниченного перемещения кулачков для повышения разрежения на впуске в ответ на разрежение на впуске, являющееся недостаточным для пуска в ход транспортного средства, и в остановленном состоянии транспортного средства, отмену ограниченного перемещения кулачков для повышения разрежения на впуске в ответ на разрежение на впуске, являющееся недостаточным для работы привода вспомогательных устройств передней части. Отмена ограниченного перемещения кулачков может содержать осуществление опережения впускного кулачка для повышения имеющегося в распоряжении крутящего момента, управление скоростью изменения положения кулачка на основании положения кулачка относительно положения одного или более других кулачков, и управление изменением положения кулачков на основании реакции кулачков на команды изменения положения.
Способ дополнительно может содержать осуществление опережения установки момента зажигания до MBT для повышения имеющегося в распоряжении крутящего момента, отключение генератора переменного тока для повышения имеющегося в распоряжении крутящего момента, отсоединение компрессора кондиционирования воздуха для повышения имеющегося в распоряжении крутящего момента, повышение отдачи масляного насоса, чтобы повышать давление масла и содействовать позиционированию кулачков для повышения имеющегося в распоряжении крутящего момента, увеличение подачи богатой топливно-воздушной смеси для повышения имеющегося в распоряжении крутящего момента, отключение вспомогательных электрических нагрузок и увеличение охлаждения моторного масла. чтобы понижать температуру масла, повышать давление масла и содействовать позиционированию кулачков для повышения имеющегося в распоряжении крутящего момента.
В еще одном варианте осуществления, способ может содержать в первом состоянии движения транспортного средства, регулируют установку фаз кулачкового распределения в ответ на запрошенный крутящий момент и запрошенную скорость транспортного средства, но независимо от имеющегося в распоряжении крутящего момента, и ограничивают регулировку установки фаз кулачкового распределения в ответ на перегрев масла при повышенных нагрузках, и во втором состоянии, следующем за первым состоянием, отмену ограничения регулировки установки фаз кулачкового распределения в ответ на имеющийся в распоряжении крутящий момент, являющийся недостаточным для удовлетворения запрошенного крутящего момента. Второе состояние может содержать состояние транспортного средства без движения. Более того, отмена ограничения регулировки ограничения установки фаз кулачкового распределения может содержать осуществление запаздывания одного или более кулачков, чтобы синхронизировать перемещение кулачков в пределах порогового значения синхронизации кулачков, и/или осуществление опережения установки фаз кулачкового распределения, чтобы повышать имеющийся в распоряжении крутящий момент.
Далее, с обращением к фиг. 6, она показывает примерную временную диаграмму 500 изменения положения кулачков для двигателя внутреннего сгорания во время первого и второго состояния. Графики 510, 520, 530, 536, 540, 550, 560, 570, 580 и 590 соответствуют линиям тренда для температуры масла, скорости вращения двигателя, запрошенного крутящего момента, имеющегося в распоряжении крутящего момента, запрошенного крутящего момента -имеющийся в распоряжении крутящий момент, давления масла, разности фазовых углов кулачков между многочисленными кулачками, перекрытия клапанов, топливно-воздушного соотношения (например, λ) и скорости транспортного средства, соответственно. Более того, 512 - пороговая температура масла, Toil,TH, 522 - пороговое скорость вращения двигателя, rpm,TH двигателя, 532 - пороговый крутящий момент, Tq,TH, 542 - пороговая разность крутящих моментов, ΔTq,TH, 552 - второе пороговое давление масла Poil,TH2, 554 - первое пороговое давление масла Poil,TH1, 562 - пороговое значение синхронизации кулачков, 572 представляет нулевое перекрытие клапанов, а 582 представляет стехиометрическое топливно-воздушное соотношение.
Временная диаграмма 500 может представлять примерный сценарий для транспортного средства, буксирующего тяжелый груз (например, повышенную нагрузку, большую, чем пороговая нагрузка) вверх по затяжному склону перед остановкой транспортного средства в t1, а затем, запускающегося и возобновляющего движение после t1. В качестве примеров, транспортное средство, буксирующее тяжелый груз, может быть грузовым автомобилем малой грузоподъемности с тяжело нагруженным кузовом, или транспортным средством, буксирующим тяжелый прицеп. Вследствие высокой нагрузки и затяжного склона, Toil 510 неуклонно повышается до t1 по мере того, как транспортное средство поднимается по склону, превосходя Toil,TH 512 в t0. Таким образом, в t0, первое состояние удовлетворяется, и контроллер 12 ограничивает перемещение кулачков. Например, положения кулачков могут пришпиливаться в положениях 574 кулачков по умолчанию, чтобы поддерживать ездовые качества транспортного средства. Вследствие повышения Toil 510, Poil 550 неуклонно падает до t1, понижаясь ниже Poil,TH1. До t1, число 520 оборотов в минуту двигателя постепенно снижается, например, так как двигатель понижает передачу для повышения имеющегося в распоряжении крутящего момента 536 и по мере того, как скорость транспортного средства понижается наряду с подъемом по склону. Непосредственно перед t1, число 520 оборотов в минуту двигателя падает ниже rpm,TH 522 двигателя. Во время подъема по склону, Tqavail 536 точно соответствует Tqreq 530, чтобы Tqreq-Tqavail 540 было близким к нулю. Хотя Toil 510 поднимается выше Toil,TH 512, и число 520 оборотов в минуту двигателя снижается ниже rpm,TH 522 двигателя, до t1, второе состояние не удовлетворено, так как Tqreq-Tqavail 540 находится ниже Tq,TH. Кроме того, до t1, контроллер 12 способен добиваться управляемости установки фаз клапанного распределения и установки фаз кулачкового распределения, при этом кулачки синхронизируются (например, разность 560 фазовых углов кулачков находится в пределах порогового значения 562 синхронизации кулачков). Кроме того еще, перекрытие 570 клапанов является положительным и уменьшается по мере того, как число 520 оборотов в минуту двигателя падает, и транспортное средство замедляется, приближаясь к t1. В качестве примера, положительное перекрытие клапанов может включать в себя регулировку установки фаз клапанного распределения для позднего закрывания впускного клапана, чтобы понижать насосные потери двигателя, в то время как транспортное средство замедляется до остановки. До t1, богатая топливно-воздушная смесь, представленная посредством 580, подается во впускной коллектор до непосредственно перед t1, где 580 становится бедным, в то время как число 520 оборотов двигателя падает. Дополнительно, до t1, скорость 590 транспортного средства постепенно снижается по мере того, как транспортное средство замедляется до остановки в t1.
В t1, транспортное средство останавливается (например, скорость транспортного средства имеет значение 0), и оба, Tqavail 536 и Tqreq 530, падают ниже Tq,TH 532. Незамедлительно вслед за t1, Tqreq 530 резко повышается (например, нажимается педаль акселератора) для возобновления движения, однако, Tqavail 536 остается ниже Tq,TH 532. После t1, Tqavail 536 не повышается, чтобы соответствовать Tqreq 530, так как гидротрансформатор может удерживать скорость вращения двигателя ниже rpm,TH 522 двигателя. Более того, перемещение кулачков ограничено, так как Toil больше, чем Toil,TH (например, вязкость масла находится ниже по сравнению с тем, когда Toil меньше, чем Toil,TH), а Poil находится ниже Poil,TH1, управляемость кулачков с приводом от давления масла может быть ограничена. В качестве примера, положения кулачков могут перемещаться медленно (например, по сравнению с тем, когда Poil>Poil,TH1) из заштифтованных положений кулачков по умолчанию, которые повышают Tqavail, в то время как приведение в движение возобновляется непосредственно после t1. Соответственно, в примерном сценарии по временной диаграмме 500, транспортное средство обездвиживается после буксировки тяжелого груза вверх по затяжному склону и остановки. В качестве еще одного примерного сценария, остановка транспортного средства после буксировки тяжелого груза вверх по затяжному склону при большой высоте над уровнем моря также может давать в результате обездвиживание транспортного средства, поскольку уровни кислорода на впуске понижаются, а имеющийся в распоряжении крутящий момент дополнительно уменьшается.
Соответственно, непосредственно вслед за t1, когда Tqreq-Tqavail 540 возрастает выше Tq,TH 542, второе состояние удовлетворяется. В ответ на второе состояние, контроллер 12 отдает приоритет повышению имеющегося крутящего момента у двигателя, чтобы пускать в ход транспортное средство, над поддержанием комфорта пассажиров, экономии топлива, ездовых качеств, и тому подобным. В других примерных сценариях, контроллер 12 может отдавать приоритет повышению имеющегося в распоряжении крутящего момента у двигателя над поддержанием комфорта пассажиров, экономией топлива, ездовыми качествами, и тому подобным, чтобы эксплуатировать привод вспомогательных устройств передней части. Более того, контроллер 12 может отдавать приоритет повышению разрежения на впуске над поддержанием комфорта пассажиров, экономией топлива, ездовыми качествами, и тому подобным, чтобы облегчать недостаточное разрежение во впускном коллекторе.
В качестве примера приоритезации повышения имеющегося в распоряжении крутящего момента, контроллер 12 может уменьшать перекрытие 570 клапанов для увеличения коэффициента наполнения двигателя, впуска сжигаемого воздуха и Tqavail на низких скоростях вращения в минуту двигателя. Более того, контроллер 12 проверяет, что кулачки могут надежно изменить положение посредством инициирования изменения положения кулачков и оценки индикаторов управляемости кулачков. Оценивание индикаторов управляемости кулачков включает в себя сравнение Poil 550 с Poil,TH2 552, оценку, могут ли кулачки перемещаться из заштифтованного положения по умолчанию, определение, находится ли разность 560 фазовых углов кулачков в пределах порогового значения 562 синхронизации кулачков, и определение, стабильно ли перемещаются кулачки в направлении своих новых положений. Хотя Poil 550 понижается вследствие повышенной Toil, Poil больше, чем Poil,TH2 552, и заштифтованные кулачки могут разблокироваться. Более того, как указано постоянным уменьшением перекрытия 570 клапанов между t1 и t2, положения кулачков являются подвижными из заштифтованного положения по умолчанию и стабильно перемещаются в направлении своих новых положений. Так как изменение положения кулачков инициировано между t1 и t2, разность 560 фазовых углов кулачков между многочисленными кулачками возрастает сверх порогового значения 562 синхронизации кулачков. В качестве примера, пониженная синхронизация кулачков может происходить вследствие Poil, являющегося меньшим, чем Poil,TH1, которое может уменьшать управляемость и скорости перемещения кулачков OPA. Для повышения надежности изменения положения кулачков, контроллер 12 замедляет перемещение более быстрых кулачков после t1, и разность 560 фазовых углов кулачков начинает уменьшаться по мере того, как время приближается к t2. В t2, более быстрые кулачки были понижены в достаточной мере, тем самым, разность 560 фазовых углов кулачков уменьшается ниже порогового значения 562 синхронизации кулачков. Таким образом, в t2, контроллер 12 продолжает изменение положения кулачков для повышения имеющегося в распоряжении крутящего момента, поскольку индикаторы управляемости кулачков указывают, что кулачки могут позиционироваться надежно.
После t2, контроллер 12 продолжает изменение положения кулачков, уменьшая перекрытие клапанов до нуля, чтобы повысить имеющийся в распоряжении крутящий момент. Изменение положения кулачков может продолжаться медленно, так как Toil относительно высока (например, непосредственно после t2, Toil>Toil,TH), а Poil является относительно низким (например, непосредственно после t2, Poil
В t3, Toil меньше, чем Toil,TH, скорость вращения в минуту двигателя больше, чем rpm,TH двигателя, Tqavail больше, чем Tqavail,TH, а Tqreq-Tqavail меньше, чем TTH. Соответственно, в t3, второе состояние больше не удовлетворено, и контроллер 12 прекращает приоритет повышению Tqavail над ездовыми качествами, экономией топлива, комфортом пассажиров и тому подобным. Более того, перекрытие 570 клапанов становится положительным по мере того, как кулачки возвращаются в свои заштифтованные положения по умолчанию, и топливно-воздушная смесь (например, 580), подаваемая на впуск двигателя, становится бедной.
Отметим, что примерные процедуры управления и оценки, включенные в материалы настоящего описания, могут использоваться с различными конфигурациями систем двигателя и/или транспортного средства. Специфичные процедуры, описанные в материалах настоящего описания, могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемая событиями, управляемая прерыванием, многозадачная, многопоточная, и тому подобная. По существу, проиллюстрированные различные действия, операции и/или функции могут выполняться в проиллюстрированной последовательности, параллельно, или в некоторых случаях пропускаться. Подобным образом, порядок обработки не обязательно требуется для достижения признаков и преимуществ примерных вариантов осуществления, описанных в материалах настоящего описания, но приведен для облегчения иллюстрации и описания. Одно или более из проиллюстрированных действий, операций и/или функций могут выполняться неоднократно, в зависимости от конкретной используемой стратегии. Кроме того, описанные действия, операции и/или функции могут графически представлять управляющую программу, которая должна быть запрограммирована в постоянную память машиночитаемого запоминающего носителя в системе управления двигателем.
Следует принимать во внимание, что конфигурации и процедуры, раскрытые в материалах настоящего описания, являются примерными по природе, и что эти специфичные варианты осуществления не должны рассматриваться в ограничительном смысле, так как возможны многочисленные варианты. Например, вышеприведенная технология может быть применена к типам двигателя V6, I-4, I-6, V-12, оппозитному 4-цилиндровому и другим типам двигателя. Предмет настоящего раскрытия включает в себя все новейшие и не очевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, раскрытые в материалах настоящего описания.
Последующая формула полезной модели подробно указывает некоторые комбинации и подкомбинации, рассматриваемые в качестве новейших и неочевидных. Эти пункты формулы полезной модели могут указывать ссылкой на элемент в единственном числе либо «первый» элемент или его эквивалент. Следует понимать, что такие пункты формулы полезной модели включают в себя объединение одного или более таких элементов, не требуя и не исключая двух или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены формулой полезной модели посредством изменения настоящей формулы полезной модели или представления новой формулы полезной модели в этой или родственной заявке. Такая формула полезной модели, более широкая, более узкая, равная или отличная по объему по отношению к исходной формуле полезной модели, также рассматривается в качестве включенной в предмет полезной модели настоящего раскрытия.
Реферат
Транспортное средство, содержащее:двигатель;кулачок с приводом от давления масла; иконтроллер с исполняемыми командами для:регулировки установки фаз кулачкового распределения в ответ на запрошенный крутящий момент и запрошенную скорость транспортного средства, но независимо от имеющегося в распоряжении крутящего момента, и ограничения регулировки установки фаз кулачкового распределения в ответ на перегрев масла при повышенных нагрузках в первом состоянии движения транспортного средства; иотмены ограничения регулировки установки фаз кулачкового распределения в ответ на имеющийся в распоряжении крутящий момент, недостаточный для удовлетворения запрошенного крутящего момента, во втором состоянии, следующем за первым состоянием.
Формула
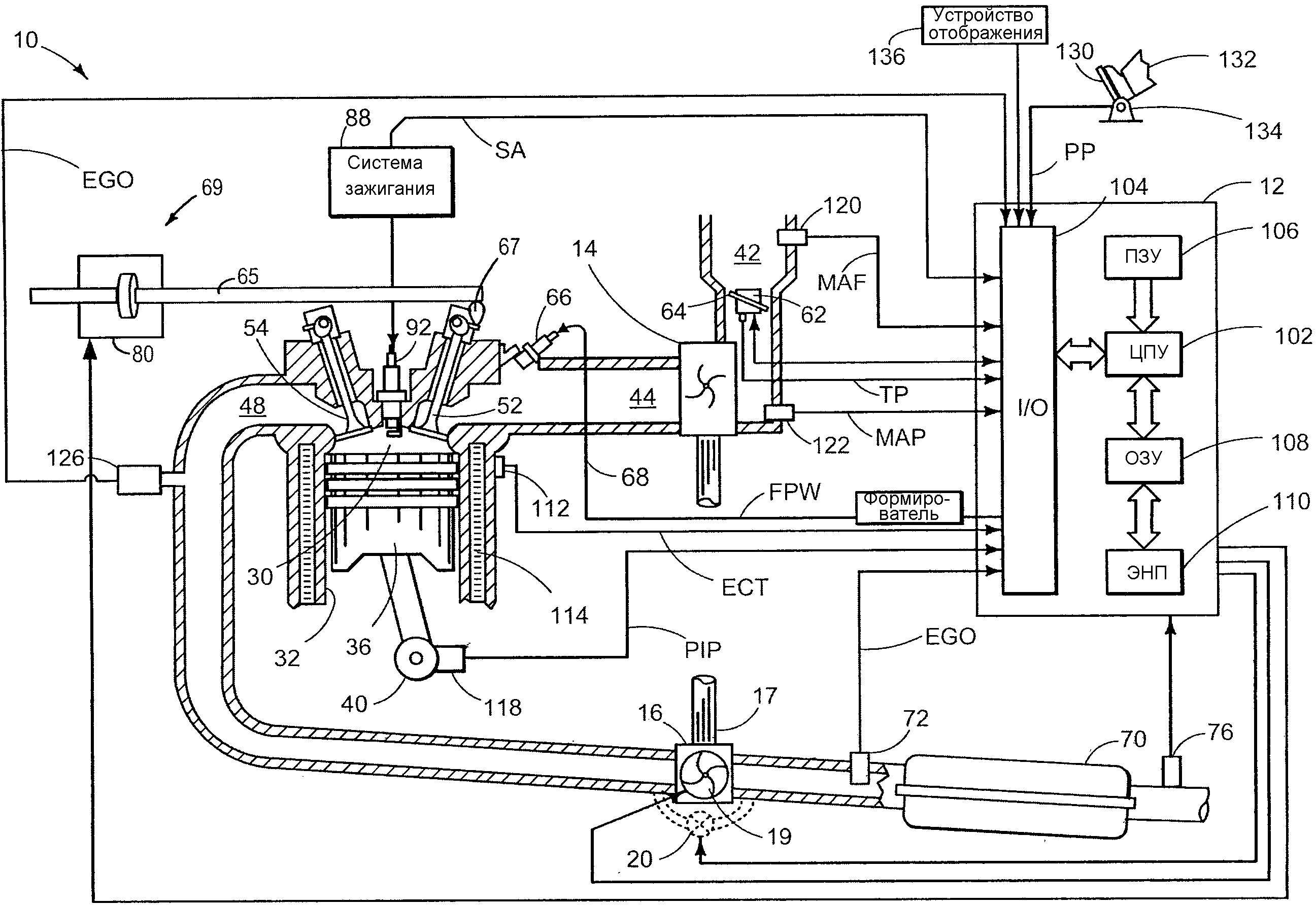
Комментарии