Способ и система мониторинга беременности - RU2677014C2
Код документа: RU2677014C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе мониторинга беременности и способу получения информации о медицинском состоянии обследуемого беременного субъекта. Более конкретно, но без ограничения объема изобретения, настоящее изобретение относится к усовершенствованиям кардиотокографических устройств и способов, применяемых для мониторинга плода у беременных женщин.
Кроме того, настоящее изобретение относится к соответствующей компьютерной программе.
УРОВЕНЬ ТЕХНИКИ
На поздних сроках беременности обычно осуществляют мониторинг беременности, который может также называться фетальным мониторингом и/или мониторингом родовой деятельности. В качестве примера, во время родов могут контролироваться физиологические параметры, такие как частота сердечных сокращений плода с целью выявления признаков угнетения и/или хорошего самочувствия плода. Перед родами будущая мать может проходить одно или более ультразвуковых обследований с предоставлением информации о частоте сердечных сокращений плода, информации о шевелении плода, информации о размере плода и подобной информации, используемой для определения маркеров роста плода во время беременности. Во время схваток и родов может контролироваться также активность матки, в частности, её сокращения.
В гинекологии и акушерстве, как правило, два медицинских параметра являются важными для оценки состояния плода. Этими двумя параметрами являются частота сердечных сокращений плода с измерением интервалов между сердечными сокращениями, например посредством ультразвукового доплеровского сигнала, и активность матки (или родовая активность). Одновременная оценка частоты сердечных сокращений плода (ЧССП) и активности матки позволяет точно определить состояние плода. Системы мониторинга, способные отслеживать оба параметра, часто называются кардиотокографами (КТГ-мониторами). Однако шевеление плода также рассматривается в качестве показательного параметра для оценки состояния плода.
В качестве примера, традиционное КТГ-устройство (кардиотокографическое устройство) может содержать ультразвуковой доплеровский преобразователь (УЗ-преобразователь) для измерения частоты сердечных сокращений плода (ЧССП) и детектирования шевеления плода, а также датчик давления (также называемый TOCO-датчик или токодинамометр) для измерения активности матки. Каждый из преобразователей может быть размещен на животе матери, например посредством эластичного ремня, размещенного вокруг талии, или с помощью липкой ленты или лейкопластыря. Каждый из преобразователей может быть установлен внутри соответствующего зонда. В частности, ультразвуковой преобразователь может быть вручную размещен в месте, подходящем для поиска достаточно сильного сигнала, например достаточно сильного сигнала сердцебиения или частоты сердечных сокращений. Идеальное положение ультразвукового преобразователя на животе роженицы может зависеть от фактической ориентации плода.
Было обнаружено, что движение преобразователей шевеления плода, например вследствие (пере)установки преобразователя и/или движения матери, может привести к ложной индикации ультразвуковым преобразователем шевеления плода. В результате, детектирование шевеления плода обычно является надежным только в случае отсутствия артефактов движения.
В этой связи, US 2012/0150010 A1 раскрывает прибор для детектирования активности матки, содержащий первое средство ввода, выполненное с возможностью получения электрических сигналов от накожных электродов, второе средство ввода, выполненное с возможностью получения сигналов движения, указывающих на движение тела роженицы, от датчика движения; средство обработки сигнала, выполненное с возможностью отделения сигнала электромиограммы матки от сигналов частоты сердечных сокращений плода и матери в электрических сигналах и фильтрации материнских артефактов движения от электромиограммы матки с использованием сигналов движения, и средство вывода, выполненное с возможностью представления данных электрогистерограммы на основе сигнала электромиограммы матки.
Кроме того, указанный документ описывает несколько усовершенствований прибора и соответствующий способ. В частности, в документе предложено отфильтровывать материнские артефакты движения от сигнала электромиограммы посредством ослабления сигнала электромиограммы как функции от величины сигналов движения. Также рассмотрен вопрос детектирования частоты сердечных сокращений плода.
US 2009/0270767 A1 раскрывает устройство обработки информации о шевелении плода и способ прогнозирования состояния здорового развития плода, содержащее устройство сбора сигналов шевеления плода, включающее в себя по меньшей мере один датчик шевеления плода, прикрепленный к животу беременной женщины, для детектирования шевелений плода; и средство хранения полученной информации о шевелении плода для хранения сигналов детектирования шевеления плода, детектированных указанным датчиком шевеления плода, совместно с информацией о времени детектирования; средство обработки информации о шевелении плода для расчета количества шевелений плода в единицу времени для каждой недели беременности на основании информации о матери, идентифицирующей беременную женщину, и информации о количестве дней беременности наряду с информацией о сигналах детектирования шевеления плода и информацией о времени детектирования, сохраненной в средстве хранения полученной информации о шевелении плода указанного устройства сбора сигналов шевеления плода; и дисплей/средство вывода, выполненный/выполненное с возможностью упорядочивания и отображения полученного количества шевелений плода.
В известных способах и устройствах кардиотокографии движения матери могут быть измерены датчиком движения матери, прикрепленным к ее животу. Сигналы, предоставляемые таким видом датчиков, могут быть использованы для детектирования движения матери и последующего подавления выходных сигналов (ультразвукового) преобразователя шевеления плода или параметров, получаемых на основании этих сигналов.
Было обнаружено, что также и эти усовершенствованные устройства могут быть подвержены возникновению ложно определенных фаз подавления, приводящих к общим погрешностям измерений. Это по меньшей мере отчасти связано с разнообразием возможных нежелательных эффектов, связанных с движением, которые могут возникнуть во время сеансов мониторинга беременности.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание системы мониторинга беременности и соответствующего способа, которые позволяют повысить точность мониторинга. Дополнительным преимуществом является создание системы и способа, менее подверженных ошибкам измерений, связанных с движением. Предпочтительно система и способ соответствующим образом должны обеспечивать надежность измерений также и в условиях проведения мониторинга при нежелательных движениях. Еще более предпочтительно система и способ должны обеспечивать обработку помех и/или погрешностей, с которыми обычно не могут должным образом справиться традиционные системы.
Согласно первому аспекту настоящего изобретения предлагается система мониторинга беременности, содержащая:
преобразователь фетального мониторинга, выполненный с возможностью детектирования информации о медицинском состоянии плода; блок первых датчиков движения, связанный (associated) с преобразователем фетального мониторинга и содержащий по меньшей мере один первый датчик движения;
блок вторых датчиков движения, содержащий по меньшей мере один второй датчик движения;
устройство управления, содержащее блок оценки, выполненный с возможностью определения относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения, при этом определение относительного движения основано на сигналах движения, подаваемых по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения; причем
по меньшей мере один датчик из указанных по меньшей мере одного первого датчика движения и по меньшей мере одного второго датчика движения выполнен с возможностью крепления к абдоминальной области обследуемого субъекта;
устройство управления выполнено с возможностью:
a) выборочно разрешать, в режиме разблокирования, обработку детектированной информации о медицинском состоянии плода, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на стабильные условия измерения; и
b) выборочно предотвращать, в режиме блокирования, обработку детектированной информации о медицинском состоянии плода, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на нестабильные условия измерения.
Данный аспект основан на понимании того, что помимо преобразователя фетального мониторинга могут быть применены по меньшей мере два различных датчика движения для обеспечения значительного улучшения качества сигнала и точности измерений. По меньшей мере один из датчиков движения, в частности по меньшей мере один второй датчик движения, может выступать в качестве эталонного датчика. Эталонный датчик и соответствующий блок датчиков могут обеспечивать эталонный сигнал движения и/или местоположения.
Следовательно, сигналы движения и/или местоположения, предоставленные по меньшей мере одним первым датчиком и по меньшей мере одним вторым датчиком, могут быть обработаны так, чтобы можно было получить первый сигнал движения и второй сигнал движения. Посредством сравнения первого сигнала движения и второго сигнала движения может быть сгенерирован по меньшей мере один сигнал относительного движения. Один или более сигналов движения могут быть оценены устройством управления так, чтобы окончательно установить, можно ли рассматривать фактически детектированную или детектируемую информацию о медицинском состоянии плода как надежную информацию. На основании решения, принятого устройством управления, дальнейшая обработка детектированной информации о медицинском состоянии плода может быть разрешена или предотвращена. Разрешение может включать прохождение и/или передачу сигналов, содержащих требуемую информацию.
Предотвращение может включать ослабление и/или исключение сигналов, содержащих требуемую информацию. Предотвращение и/или разрешение обработки информации может быть применено на временной основе.
База сигнала для определения движения может быть расширена путем добавления по меньшей мере дополнительного канала сигнала движения, т.е. обеспечена за счет по меньшей мере одного второго датчика движения. Расширение базы сигнала для определения нежелательного воздействия движения может значительно повысить точность и надежность мониторинга. Другими словами, известные устройства и системы, полагающиеся на один датчик движения в дополнение к преобразователю фетального мониторинга, например, имеют ограниченные возможности детектирования движения, и, таким образом, зачастую точность мониторинга снижена, поскольку не исключено, что для дальнейшей обработки могут быть переданы искаженные сигналы, и в некоторых случаях даже ровные (plain) сигналы, ненарушенные нежелательным движением, оказываются ошибочно ослабленными.
По меньшей мере один первый датчик движения, связанный с преобразователем фетального мониторинга, может иметь в общем случае предварительно заданную ориентацию и местоположение относительно преобразователя фетального мониторинга, по меньшей мере когда он находится в контакте с абдоминальной областью. Другими словами, преобразователь фетального мониторинга и по меньшей мере один первый датчик движения могут подвергаться по существу одним и тем же или по меньшей мере аналогичным (абсолютным) движениям. Иначе говоря, в некоторых вариантах осуществления настоящего изобретения может быть предпочтительно, чтобы относительное движение между по меньшей мере одним первым датчиком движения и преобразователем фетального мониторинга было в целом предотвращено, по меньшей мере частично.
По меньшей мере один второй датчик движения, который обычно не связан с преобразователем фетального мониторинга, может перемещаться по существу независимо от преобразователя фетального мониторинга. Таким образом, относительное движение между по меньшей мере одним вторым датчиком движения и преобразователем фетального мониторинга в общем случае допустимо. Относительное движение между по меньшей мере одним вторым датчиком движения и по меньшей мере одним первым датчиком движения может, таким образом, рассматриваться как мера относительного движения между по меньшей мере одним вторым датчиком движения и преобразователем фетального мониторинга. Знание данной меры по существу позволяет улучшить классификацию сигналов с учетом влияний фактических движений.
Более того, детектирование фактических сигналов, связанных с положением тела, может быть таким образом улучшено, поскольку по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения могут перемещаться относительно друг друга. Изменения в относительном движении по меньшей мере одного первого датчика движения и по меньшей мере одного второго датчика движения могут быть проанализированы, чтобы на основании этого получить информацию, связанную с положением тела (или о положении тела), при условии что по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения прикладывают или прикрепляют к обследуемому субъекту, меняющему положение тела.
Предпочтительно по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения расположены на расстоянии друг от друга при прикладывании к обследуемому субъекту. Может быть предпочтительно, чтобы по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения при прикладывании к субъекту во время мониторинга находились на расстоянии по меньшей мере 0,1 м (метра), предпочтительно по меньшей мере 0,15 м и более предпочтительно по меньшей мере 0,25 м в абдоминальной области субъекта.
В настоящей заявке термин "информация о медицинском состоянии" может в целом включать индикативную информацию о медицинском состоянии. Применительно к варианту осуществления изобретения, относящемуся к кардиотокографии, частота сердечных сокращений плода, шевеление плода, сокращения матки и т.п. и соответствующая информация могут рассматриваться как информация о медицинском состоянии.
В настоящей заявке термин "движение" может также в целом относиться к термину "перемещение". Использование термина "движение" должно относиться к любому типу перемещения и/или движения относительно фиксированной локальной всемирной системы отсчета. Кроме того, термин "движение" может включать абсолютное движение и/или относительное движение. Движение может в основном включать перемещения, состоящие из линейного перемещения, поворачивания (которое может быть интерпретировано как изменение ориентации) или их сочетания. Каждый блок датчиков движения может быть выполнен по меньшей мере в виде одного отдельного датчика движения. Дополнительно, может быть предпочтительно, чтобы по меньшей мере один блок из блока первых датчиков движения и блока вторых датчиков движения содержал более одного соответствующего датчика движения, в частности два или более датчиков.
В связи с этим следует отметить, что по меньшей мере в некоторых вариантах осуществления изобретения по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения не должны смешиваться с датчиками, детектирующими информацию о медицинском состоянии, например, с преобразователем фетального мониторинга. Хотя признано считать, что преобразователь фетального мониторинга и в некоторых вариантах осуществления изобретения соответствующий преобразователь мониторинга матери (как указано ниже) могут детектировать сигналы, связанные с движением, такие как, например, частота сердечных сокращений плода и/или сокращения матки, подчеркивается, что по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения могут рассматриваться как отдельные специализированные датчики движения. Другими словами, по меньшей мере в некоторых вариантах осуществления изобретения по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения могут быть реализованы в виде одноцелевых датчиков движения, таких как, например, акселерометры, гиродатчики, инерционные измерительные блоки и т.п.
Датчик движения может рассматриваться как датчик, выполненный с возможностью детектирования движения вдоль по меньшей мере одной оси. Движение в примерной (например, декартовой) системе координат может иметь шесть степеней свободы, причем могут иметься три степени свободы линейного движения вдоль соответствующих осей (например, оси X, оси Y и оси Z) и три степени свободы поворотного движения вокруг соответствующих осей. Иллюстративная результирующая трехмерная траектория движения, определенная в многомерном пространстве, может состоять из соответствующих компонентов движения, связанных с прямолинейным движением и/или поворотным движением относительно соответствующей оси. Датчик движения может быть выполнен с возможностью детектирования движения относительно по меньшей мере одной из шести степеней свободы.
В частности, применительно к фетальному мониторингу, вполне можно предположить, что в будущем будет осуществляться ненавязчивый мониторинг при помощи беспроводных преобразователей, позволяющий беременной женщине воспользоваться некоторой свободой перемещения, например, прогуливаться. Отрицательным моментом в этой связи является возможная ложная индикация шевеления плода. Система для измерения шевелений плода может содержать по меньшей мере один дополнительный датчик движения, а предпочтительно - два дополнительных датчика движения. В зависимости от соответствующих детектированных параметров движения информация о медицинском состоянии плода может подавляться.
В соответствии с вариантом осуществления системы мониторинга предусмотрен преобразователь мониторинга матери, детектирующий информацию о медицинском состоянии матери, причем с преобразователем мониторинга матери связан блок вторых датчиков движения. Таким образом, устройство управления может также выборочно разрешать или предотвращать обработку детектированной информации о медицинском состоянии матери в режиме разблокирования и в режиме блокирования соответственно. Детектирование информации о медицинском состоянии матери может дополнительно расширить область применения системы для мониторинга беременности. В особенности, полезно детектировать информацию о медицинском состоянии и плода, и матери. Таким образом, может быть осуществлено всестороннее наблюдение за пациентом на этапах беременности и/или во время родов.
Однако могут быть рассмотрены несколько альтернативных вариантов осуществления настоящего изобретения, в которых по меньшей мере один второй датчик движения (или блок вторых датчиков движения) не связан ни с каким из преобразователей мониторинга медицинской информации. Другими словами, по меньшей мере один второй датчик движения может также рассматриваться в качестве отдельного датчика движения, прикладываемого или прикрепляемого к обследуемому субъекту, например, к абдоминальной области беременной женщины. Кроме того, таким образом по меньшей мере один второй датчик движения может обеспечивать эталонные данные движения, которые могут быть использованы для детектирования и оценки возникновения движений.
По меньшей мере в некоторых вариантах осуществления изобретения, по меньшей мере один второй датчик движения, который связан с преобразователем мониторинга матери, может иметь в общем случае предварительно заданную ориентацию и местоположение относительно преобразователя фетального мониторинга, по меньшей мере когда он находится в контакте с абдоминальной областью. Другими словами, преобразователь фетального мониторинга и по меньшей мере один первый датчик движения могут испытывать по существу одни и те же или по меньшей мере аналогичные (абсолютные) движения. Иначе говоря, в некоторых вариантах осуществления настоящего изобретения может быть предпочтительно, чтобы относительное движение между по меньшей мере одним первым датчиком движения и преобразователем фетального мониторинга было в основном предотвращено, по меньшей мере частично.
При необходимости, в частности, в случаях, когда имеется более двух блоков датчиков движения, один блок датчиков движения может быть связан с преобразователем фетального мониторинга, другой блок датчиков движения может быть связан с преобразователем мониторинга матери, и еще один блок датчиков движения может быть приложен к абдоминальной области беременной женщины в виде по существу независимого блока датчиков движения. Следовательно, по меньшей мере три датчика движения могут быть расположены таким образом, чтобы получать данные о движении помимо информации о медицинском состоянии, детектируемой преобразователем фетального мониторинга и преобразователем мониторинга матери.
В соответствии с другим вариантом осуществления изобретения преобразователь фетального мониторинга выполнен в виде ультразвукового преобразователя, детектирующего индикативную информацию о частоте сердечных сокращений плода или о шевелении плода. В соответствии с еще одним вариантом осуществления настоящего изобретения преобразователь мониторинга матери является преобразователем давления, детектирующим индикативную информацию о сокращениях матки матери. В некоторых вариантах осуществления изобретения преобразователь мониторинга матери может быть выполнен в виде преобразователя сокращений матки, который может также называться токодинамометром, а преобразователь фетального мониторинга может быть выполнен в виде преобразователя частоты сердечных сокращений плода, который может также называться ультразвуковым датчиком.
При детектировании движения или относительного движения между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения может быть осуществлена соответствующая классификация движений. Например, может быть детектирована некорректное действие, непреднамеренные смещения, изменения положения тела и другие виды движений. Таким образом, обработка и/или передача сигнала может контролироваться соответствующим образом, тогда как ошибки классификации могут быть уменьшены относительно пространства усиленного сигнала движения.
В другом варианте осуществления изобретения по меньшей мере один из по меньшей мере одного первого датчика движения и по меньшей мере одного второго датчика движения является датчиком ускорения, детектирующим индикативную информацию об ускорениях. В альтернативном варианте по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения могут быть реализованы в виде гироскопического датчика или инерционного датчика, такого как инерционный измерительный блок. Следует в общем случае подчеркнуть, что по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения предпочтительно отделены и/или обособлены от любого преобразователя фетального мониторинга и преобразователя мониторинга матери, тогда как в некоторых вариантах осуществления изобретения они всё же связаны и/или соединены с преобразователем фетального мониторинга и преобразователем мониторинга матери.
В традиционных датчиках ускорения обычно используются пьезоэлектрические, пьезорезистивные и/или емкостные компоненты для преобразования (механического) движения в сигнал. Многие датчики ускорения выполнены чувствительными только к одному направлению. Таким образом, нередко объединяют несколько датчиков ускорения, имеющих разную ориентацию, для определения датчика движения, способного детектировать многоканальное (или многомерное) движение в системе координат, имеющей две или более (обычно до шести) степеней свободы. Однако могут быть также реализованы акселерометры или, в более общем смысле, датчики движения как таковые, чувствительные в более чем одном направлении. Например, с этой целью могут быть использованы соответствующие микроэлектромеханические системы, гироскопы и инерционные измерительные блоки.
Еще в одном варианте осуществления изобретения преобразователь фетального мониторинга и блок первых датчиков движения механически соединены друг с другом. Например, преобразователь фетального мониторинга и блок первых датчиков движения объединены в общий корпус или прикреплены к общему ремню или липкой ленте или лейкопластырю. Соответственно, может быть также предпочтительно, по меньшей мере в некоторых вариантах осуществления изобретения, чтобы преобразователь мониторинга матери и блок вторых датчиков движения были механически соединены друг с другом.
Еще в одном варианте осуществления изобретения блок первых датчиков движения и второй датчик движения могут быть выполнены с возможностью крепления, независимо друг от друга, к абдоминальной области обследуемого субъекта. В некоторых вариантах предпочтительно, чтобы между блоком первых датчиков движения и вторым датчиком движения не было механической связи, так чтобы относительное движение между блоком первых датчиков движения и вторым датчиком движения могло осуществляться без большого сопротивления.
Дополнительно, в соответствии с другим вариантом осуществления изобретения, устройство управления выполнено с возможностью выборочной приостановки, в режиме приостановки, обработки детектированной информации о медицинском состоянии плода после детектирования картины движения, указывающей на нестабильные условия измерения. В настоящей заявке термин "нестабильные условия измерения" могут, в частности, относиться к изменению положения тела обследуемого субъекта. Однако, в этой связи другие виды причин и проявлений погрешностей, как уже указано выше, также могут рассматриваться в указанном контексте в качестве нестабильных условий измерения. Данный аспект может также быть применен к информации о медицинском состоянии матери по меньшей мере в некоторых вариантах осуществления изобретения. В данной связи предпочтительно, чтобы устройство управления было выполнено с возможностью оценки сигналов движения, предоставленных по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения, в частности, оценки сигналов относительного движения. Устройство управления может содержать или быть подключенным к базе данных, в которой может храниться модель положения тела и/или модель изменений положения тела. Модели фактического движения и/или изменения ориентации могут быть сравнены с соответствующими (предварительно) заданными моделями положения тела и/или изменения положения тела. Соответствующий период приостановки может в общем случае именоваться защитным интервалом.
Было обнаружено, применительно к некоторым вариантам осуществления изобретения, что (значительное) изменение положения тела матери может вызвать движение или изменение ориентации плода в целом относительно тела матери. Этот последний процесс может занять больше времени, чем фактическое изменение положения тела субъекта. Когда начинается изменение положения тела, это детектируется как движение датчиками движения, и индикация шевеления плода может быть, например, подавлена. Однако, когда новое положение тела достигнуто, датчики движения больше не детектируют движение, и таким образом индикация информации о медицинском состоянии плода больше не подавляется. Это может привести к детектированию и индикации шевеления плода, которое вызвано не фактическими перемещениями самого плода, а скорее его относительным движением в целом относительно тела матери. Применение (временного) защитного интервала может быть полезным, поскольку таким образом плод может успокоиться до того, как медицинская информация о плоде может быть возобновлена. По существу, то же самое может быть применимо к медицинской информации о матери.
Соответствующим образом, согласно другому варианту осуществления изобретения блок оценки выполнен с возможностью дополнительно определять на основании определения движения информацию об общей ориентации, причем блок оценки дополнительно определяет изменение положения тела обследуемого субъекта, на которое указывает изменение общей ориентации обследуемого субъекта. Изменение общей ориентации может содержать, например, раскачивания и повороты в кровати.
Данный вариант может быть дополнительно усовершенствован в том смысле, что блок оценки выполнен с возможностью определения информации об общей ориентации, на которую указывает относительное движение между по меньшей мере двумя из по меньшей мере одного первого датчика движения и по меньшей мере одного второго датчика движения. Это может в общем случае охватывать ситуацию, когда блок оценки выполнен дополнительно с возможностью определения картины движения для по меньшей мере одного из по меньшей мере одного первого датчика движения и по меньшей мере одного второго датчика движения, причем картина движения включает информацию о движении и ориентации.
В соответствии с усовершенствованным вариантом осуществления изобретения устройство управления выполнено с возможностью выборочно разрешать, в режиме разблокирования, обработку информации об общей ориентации, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на стабильные условия измерения, и выборочно предотвращать, в режиме блокирования, обработку информации об общей ориентации, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на нестабильные условия измерения. Этот вариант осуществления основан на понимании того, что информация об общей ориентации может быть искажена вследствие нежелательных перемещений и/или компрессионного стресса.
В настоящей заявке в некоторых вариантах осуществления изобретения обработка информации об общей ориентации может относиться к определению информации об общей ориентации. Однако, в некоторых вариантах осуществления обработка информации об общей ориентации может относиться к передаче (полученной) информации об общей ориентации, например, для дальнейшей обработки и оценки. Другими словами, определение информации об общей ориентации может быть продолжено даже в случаях детектирования нестабильных условий измерения, в которых, в то же самое время, детектированная медицинская информация о плоде исключается из дальнейшей обработки.
Согласно другому аспекту настоящего изобретения предлагается способ детектирования информации о медицинском состоянии обследуемого беременного субъекта, включающий следующие этапы:
обеспечение преобразователя фетального мониторинга, детектирующего информацию о медицинском состоянии плода;
обеспечение блока первых датчиков движения, связанного с преобразователем фетального мониторинга и содержащего по меньшей мере один первый датчик движения;
обеспечение блока вторых датчиков движения, содержащего по меньшей мере один второй датчик движения;
определение относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения, причем определение относительного движения основано на сигналах движения, предоставляемых по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения;
разрешение, в режиме разблокирования, обработки детектированной информации о медицинском состоянии плода, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на стабильные условия измерения; и
предотвращение, в режиме блокирования, обработки детектированной информации о медицинском состоянии плода, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на нестабильные условия измерения.
Данный способ может быть осуществлен при помощи раскрытой в настоящем описании системы. Разумеется, способ может быть использован в процессе непрерывного мониторинга. Хотя, конечно же, возможен и выборочный или локальный (spot check) мониторинг.
В соответствии с дополнительным вариантом осуществления способа в соответствии с настоящим изобретением, данный способ может дополнительно включать следующие этапы:
обеспечение преобразователя мониторинга матери, детектирующего информацию о медицинском состоянии матери, с которым связан блок вторых датчиков движения; и
прикладывание по меньшей мере одного первого датчика движения и по меньшей мере одного второго датчика движения к абдоминальной области обследуемого субъекта.
В соответствии еще с одним вариантом способа в соответствии с настоящим изобретением, данный способ может дополнительно включать следующие этапы:
определение на основании определения движения информации об общей ориентации;
разрешение, в режиме разблокирования, обработки информации об общей ориентации, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на стабильные условия измерения;
предотвращение, в режиме блокирования, обработки информации об общей ориентации, когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на нестабильные условия измерения;
определение изменения положения тела обследуемого субъекта, на которое указывает изменение общей ориентации обследуемого субъекта, детектированное в режиме разблокирования; и
приостановка, в режиме приостановки, обработки детектированной информации о медицинском состоянии плода в ответ на детектирование картины движения, указывающей на изменение положения тела обследуемого субъекта.
Согласно еще одному аспекту настоящего изобретения предлагается компьютерная программа, содержащая средства программного кода, обуславливающие выполнение компьютером этапов способа в соответствии с настоящим раскрытием изобретения при выполнении указанной компьютерной программы на данном компьютере. В настоящей заявке термин "компьютер" может означать самые разные обрабатывающие устройства. Другими словами, мобильные устройства, имеющие значительную вычислительную мощность, могут быть также названы компьютерными устройствами, даже если они обеспечивают меньшие ресурсы вычислительной мощности, чем стандартные "компьютеры". Разумеется, такой "компьютер" может быть частью медицинского устройства и/или системы. Дополнительно, термин "компьютер" может также относиться к устройству распределенных вычислений, которое может задействовать или использовать вычислительную мощность, представленную в облачной среде. Термин "компьютер" может также относиться к устройствам в области медицинских технологий, тренажерам и устройствам мониторинга в целом, выполненным с возможностью обработки данных. Предпочтительные варианты раскрытия изобретения охарактеризованы в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ и заявленная компьютерная программа могут иметь аналогичные предпочтительные варианты осуществления изобретения, как и заявленное устройство, как определено в зависимых пунктах формулы изобретения.
Предпочтительные варианты осуществления настоящего изобретения охарактеризованы в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ имеет аналогичные и/или идентичные предпочтительные варианты осуществления изобретения, как и заявленное устройство, как определено в зависимых пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут понятны из варианта(-ов) осуществления изобретения, описанных в настоящей заявке, и будут объяснены со ссылками на эти варианты. На нижеследующих чертежах:
Фиг. 1 изображает упрощенное схематическое представление системы мониторинга в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 2 изображает упрощенное схематическое представление другой системы мониторинга в соответствии с вариантом осуществления настоящего изобретения;
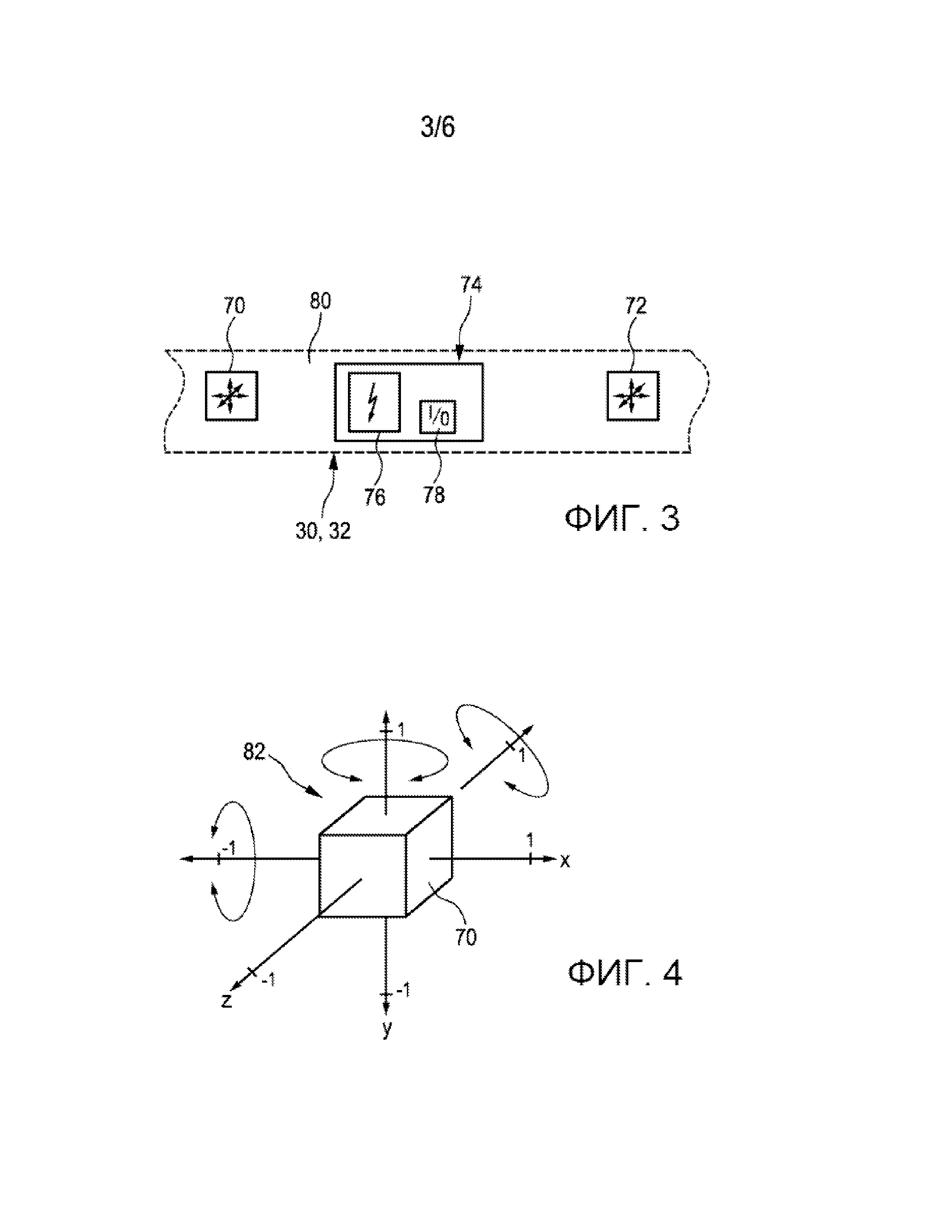
Фиг. 3 изображает упрощенное схематическое представление схемы блока датчиков движения в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 4 изображает упрощенное представление координатной системы, показывающее подходы к классификации положения тела/ориентации;
Фиг. 5 изображает иллюстративную блок-схему, представляющую несколько этапов варианта осуществления способа в соответствии с настоящим изобретением;
Фиг. 6 изображает иллюстративную блок-схему, представляющую несколько этапов альтернативного варианта осуществления способа в соответствии с настоящим изобретением; и
Фиг. 7 изображает иллюстративную блок-схему, представляющую несколько этапов другого альтернативного варианта осуществления способа в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее представлены и объяснены более подробно несколько вариантов осуществления систем и способа, которые могут использовать по меньшей мере некоторые аспекты настоящего изобретения.
В качестве примера на фиг. 1 изображена система 10 мониторинга беременности для мониторинга плода 18 в утробе или матке 16 обследуемого субъекта 12, в частности беременного субъекта женского пола. Как правило, система 10 может быть приложена к абдоминальной области 14 субъекта 12. Система 10 может быть выполнена с возможностью мониторинга информации о медицинском состоянии плода, такой как шевеление плода или, более точно, индикативных сигналов частоты сердечных сокращений плода. Дополнительно, система может быть выполнена с возможностью мониторинга субъекта 12 и вследствие этого получения информации о медицинском состоянии матери, такой как, например, сокращения матки.
Система 10 содержит преобразователь 20 фетального мониторинга. Преобразователь 20 может рассматриваться, например, в качестве преобразователя частоты сердечных сокращений плода. Обычно преобразователь 20 содержит по меньшей мере один ультразвуковой датчик 22, то есть выполнен с возможностью неинвазивного детектирования частоты сердечных сокращений плода.
В некоторых вариантах применения преобразователь 20 фетального мониторинга может вручную направляться и перемещаться оператором вдоль абдоминальной области 14 субъекта 12 для нахождения сильного сигнала плода. Само собой разумеется, что любое перемещение преобразователя 20 в абдоминальной области может также определенным образом отразиться на сигнале, подаваемым ультразвуковым датчиком 22. В результате этого требуемый сигнал плода может быть сильно искажен.
Преобразователь 20 фетального мониторинга может, дополнительно, содержать корпус 24, к которому может быть присоединена контактная поверхность или площадка 26. Площадка 26 может быть выполнена с возможностью контакта с кожей абдоминальной области субъекта 12 во время проведения процедуры. Ультразвуковой датчик 22 может быть встроен в корпус 24. Кроме того, по меньшей мере один блок 30 первых датчиков движения может быть связан с преобразователем 20 фетального мониторинга. В частности, по меньшей мере один блок 30 первых датчиков движения может быть также выполнен в корпусе 24. Таким образом, датчик 22 и по меньшей мере один блок 30 первых датчиков движения могут подвергаться воздействию по существу аналогичных движений.
Дополнительно, система 10 может содержать по меньшей мере один блок 32 вторых датчиков движения. Указанный по меньшей мере один блок 32 вторых датчиков движения может выступать в качестве эталонного блока 32 датчиков движения для блока 30 первых датчиков движения. Блок 30 первых датчиков движения, блок 32 вторых датчиков движения и, при наличии, любой другой блок датчиков движения могут быть соединены с устройством 48 управления, содержащим блок 50 оценки, посредством соответствующих сигнальных соединителей 34, 36, например, посредством проводных или беспроводных сигнальных линий.
В некоторых вариантах осуществления изобретения, указанный по меньшей мере один блок 32 вторых датчиков движения может быть связан с преобразователем 40 мониторинга матери, выполненным с возможностью детектирования информации о медицинском состоянии матери. Например, преобразователь 40 мониторинга матери может содержать по меньшей мере один токодинамометрический преобразователь 42, который выполнен с возможностью детектирования сокращений матки. Как правило, преобразователь 40 мониторинга матери может быть соединен с соответствующим присоединительным элементом 44, таким как, например, ремень, который может быть прикреплен к абдоминальной области 14 субъекта 12. Может быть предпочтительно, чтобы по меньшей мере один блок 32 вторых датчиков движения был связан с преобразователем 40 мониторинга матери. В качестве примера по меньшей мере один блок 32 вторых датчиков движения и преобразователь 40 мониторинга матери могут быть интегрированы в общий корпус (не показан на фиг. 1). Как правило, предпочтительно, чтобы преобразователь 40 мониторинга матери, в частности его токодинамометрический преобразователь 42, и по меньшей мере один блок 32 вторых датчиков движения были расположены близко друг к другу и предпочтительно механически соединены друг с другом так, что они подвергаться воздействию по существу аналогичных движений.
На фиг. 2 изображена альтернативная схема расположения системы 10а для мониторинга беременности. Как видно на фиг. 2, может быть использован преобразователь 20а фетального мониторинга, который может по существу соответствовать преобразователю 20 фетального мониторинга, изображенному в связи с фиг. 1. Преобразователь 20а фетального мониторинга содержит блок первых датчиков движения, состоящий из двух или более компонентов 30а, 30b, например, отдельных датчиков, размещенных на расстоянии друг от друга. В качестве примера компонент 30а блока датчиков движения может быть интегрирован в корпус 24, а компонент 30b блока датчиков движения может быть прикреплен к присоединительному элементу или ремню 54.
Как может быть видно далее, по меньшей мере один блок 32а, 32b вторых датчиков движения не обязательно должен быть механически соединен с преобразователем 40а мониторинга матери и токодинамометрическим преобразователем 42 соответственно. Как уже было указано выше, блок вторых датчиков движения также может состоять из двух или более компонентов 32a, 32b. В некоторых вариантах осуществления изобретения токодинамометрический преобразователь 42 и компоненты 32a, 32b блока вторых датчиков движения могут быть соединены с соответствующими присоединительными элементами 58, 60, 62. Присоединительные элементы 58, 60, 62 обычно могут быть реализованы, например, в виде ремней, липких лент, лейкопластырей, присосок. Как также видно на фиг. 2, информация о медицинском состоянии и информация о движении может передаваться по беспроводной связи при помощи модуля беспроводной связи, обозначенного номером позиции 64.
На фиг. 3 изображена упрощенная схема блока 30, 32 датчиков движения, который может обычно выступать в качестве блока датчиков движения, который может быть связан с преобразователем 20 фетального мониторинга и/или преобразователем 40 мониторинга матери. Блок 30, 32 датчиков движения может состоять по меньшей мере из одного датчика 70, 72 движения. Каждый датчик из указанного по меньшей мере одного датчика 70, 72 движения может быть, например, выполнен в виде датчика движения на основе акселерометра. Блок 30, 32 датчиков движения может, дополнительно, содержать блок 74 контроллера, который может быть оснащен контроллером 76 и портом 78 ввода/вывода. По меньшей мере некоторые или каждый из компонентов 70, 72, 74 могут быть расположены на несущей ленте 80 или в соответствующем корпусе, или иным подходящим образом. Следует понимать, что специалисты в данной области техники могут легко идентифицировать, установить и реализовать аналогичные блоки 30, 32 датчиков движения, которые могут быть соединены с системами 10, 10а с тем, чтобы еще больше повысить точность и надежность мониторинга.
На фиг. 4 изображено упрощенное представление системы 82 координат, которая может продемонстрировать примеры подходов к детектированию положения тела или, в более общем смысле, детектированию ориентации при помощи по меньшей мере одного датчика движения. В данном контексте следует отметить, что датчик движения, который может быть реализован в вышеописанной системе, может считаться акселерометром или другим подходящим датчиком, выполненным с возможностью детектирования движения, который содержит по меньшей мере один элемент восприятия движения.
Как правило, детектирование положения тела может быть выполнено посредством детектирования фактических векторов движения и ориентации, которые можно сравнить с базисными векторами, указывающими на эталонные положения тела. Детектирование положения тела может включать оценку сигналов, предоставляемых по меньшей мере одним датчиком движения. Детектирование положения тела может включать оценку сигналов, представляемых множеством датчиков движения. Следующая таблица представляет в качестве примера предварительно заданный набор положений тела и соответствующих (единичных) векторов в первую очередь для иллюстративных целей.
Процесс детектирования положения тела может обычно состоять по меньшей мере из некоторых из следующих этапов:
Усреднение данных акселерометра на определенном временном интервале, например в 1 секунду;
Нормирование результирующего вектора к единичной длине;
Расчет трехмерных евклидовых расстояний между нормированным вектором, с одной стороны, и всеми предварительно заданными базисными векторами, с другой стороны.
Детектирование базисного вектора положения тела, имеющего наименьшее расстояние/отклонение от нормированного вектора; и
Представление положения тела, соответствующего базисному вектору положения тела, найденному на предыдущем этапе, в качестве фактического положения тела.
Следует отметить, что специалисты в данной области техники могут легко идентифицировать, установить и применить аналогичные устройства и методы детектирования движения и положения тела.
На фиг. 5 схематически изображен способ детектирования уровня движения в системе мониторинга для наблюдаемого субъекта, в частности, беременного субъекта. На первом этапе 100 может быть предусмотрен блок первых датчиков движения, содержащий по меньшей мере один первый датчик движения. Предпочтительно указанный по меньшей мере один первый датчик движения связан с первым преобразователем (или преобразователем фетального мониторинга), в частности, механически соединен с ним. По меньшей мере один первый датчик движения может быть приложен к абдоминальной области беременного субъекта. По меньшей мере один первый датчик движения может быть связан с по меньшей мере одним преобразователем фетального мониторинга, детектирующим информацию о медицинском состоянии плода. На последующем этапе 102 по меньшей мере один первый датчик движения может использоваться для детектирования движения. Например, по меньшей мере один первый датчик движения может быть реализован в виде одного или более датчиков ускорения.
На этапе 104, параллельном или смещенным во времени относительно этапа 100, может быть предусмотрен блок вторых датчиков движения, содержащий по меньшей мере один второй датчик движения. Предпочтительно указанный по меньшей мере один второй датчик движения связан со вторым преобразователем (или преобразователем мониторинга матери), в частности, механически соединен с ним. По меньшей мере один второй датчик движения может быть приложен к абдоминальной области беременного субъекта. По меньшей мере один второй датчик движения может быть связан с по меньшей мере одним преобразователем мониторинга матери, детектирующим информацию о медицинском состоянии матери. На последующем этапе 106 по меньшей мере один второй датчик движения может использоваться для детектирования движения. Например, по меньшей мере один второй датчик движения может быть реализован в виде одного или более датчиков ускорения. Предпочтительно по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения смещены (или расположены на расстоянии) относительно друг друга при приложении к абдоминальной области беременного субъекта.
Далее может следовать этап 108, включающий оценку сигналов движения, предоставляемых по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. Этап 108 может также включать определение информации об относительном движении, указывающей на относительное движение между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. На этапе 110, следующем за этапом 108, может быть принято решение или проведена классификация, указывающая на уровень относительного движения. Этап 110 может включать сравнение порогового и фактического значений.
В случае если фактический уровень относительного движения превышает заданное пороговое значение, то способ может переходить к этапу 112, на котором активируется режим блокирования. Когда фактический уровень относительного движения превышает заданное пороговое значение, может быть подан явный знак о том, что первичный сигнал (или основной сигнал, представляющий интерес), по всей вероятности, искажен шумом или, более конкретно, искажен движением, так что мероприятия по дальнейшей обработке сигнала должны быть предотвращены. В настоящей заявке первичный сигнал может включать информацию о медицинском состоянии плода и/или информацию о медицинском состоянии матери.
В случае если фактический уровень относительного движения остается или опускается ниже заданного порогового значения, то способ может переходить к этапу 114, на котором активируется режим разблокирования. Когда фактический уровень относительного движения опускается ниже заданного порогового значения, может быть подан явный знак о том, что первичный сигнал (или основной сигнал, представляющий интерес) скорее всего по существу не искажен, так что мероприятия по дальнейшей обработке сигнала могут быть разрешены.
Разумеется, формулировка "превышает заданное пороговое значение" и "опускается ниже заданного порогового значения" представлена выше прежде всего для пояснительных целей и не ограничивает объем изобретения. Другими словами, может быть также применено различное сочетание между превышением/опусканием ниже и разрешением/предотвращением. Этапы 108-114 могут повторяться в непрерывном или квазинепрерывном режиме, например, во время проведения процедуры медицинского мониторинга.
На фиг. 6 изображен способ детектирования информации о медицинском состоянии беременного субъекта. На этапе 150 может быть предусмотрен по меньшей мере один преобразователь мониторинга медицинского состояния. Этот преобразователь мониторинга медицинского состояния может быть реализован в виде преобразователя фетального мониторинга. В альтернативном варианте преобразователь мониторинга медицинского состояния может быть реализован в виде преобразователя мониторинга матери. При необходимости на этапе 150 могут быть предусмотрены два преобразователя мониторинга медицинского состояния, например, преобразователь фетального мониторинга и преобразователь мониторинга матери. По меньшей мере один из преобразователей мониторинга медицинского состояния, а в некоторых предпочтительных вариантах осуществления изобретения каждый из преобразователей мониторинга медицинского состояния, может быть связан с по меньшей мере одним соответствующим датчиком движения, в частности, с датчиком ускорения или другим подходящим блоком восприятия движения.
На этапе 152 может быть проведен мониторинг медицинского состояния с целью получения или детектирования информации о медицинском состоянии. Информация о медицинском состоянии может включать информацию о частоте сердечных сокращений плода или информацию о шевелении плода в целом, а также информацию о сокращениях матки или информацию о движении матери в целом. В этой связи следует отметить, что информация о медицинском состоянии, как описано выше, обычно не может быть детектирована любым из по меньшей мере одного соответствующего датчика движения, связанного с по меньшей мере одним преобразователем мониторинга состояния.
Далее может следовать этап 154 принятия решения, который может включать проверку статуса. Этап 154 может включать получение информации о статусе, описывающей уровень относительного движения между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. Другими словами, на этапе 154 может быть получен и использован сигнальный флаг, указывающий на то, должен ли быть применен режим блокирования (см., например, этап 112 на фиг. 5) или режим разблокирования (см., например, этап 114 на фиг. 5).
Если проверка статуса, выполненная на этапе 154, приводит к применению режима блокирования, то далее может следовать этап 156, который предотвращает обработку детектированной информации о медицинском состоянии плода. Это может быть по меньшей мере отчасти обусловлено повышенным уровнем относительного движения между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. Следовательно, детектированная информация о медицинском состоянии может считаться искаженной.
Если проверка статуса, выполненная на этапе 154, приводит к применению режима разблокирования, то далее может следовать этап 158, который разрешает обработку детектированной информации о медицинском состоянии плода. Это может быть по меньшей мере отчасти обусловлено пониженным уровнем относительного движения между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. Следовательно, детектированная информация о медицинском состоянии может считаться неискаженной. Далее может следовать этап 160, который включает дальнейшую обработку информации о медицинском состоянии.
На фиг. 7 схематически изображен способ определения изменения положения тела в системе мониторинга наблюдаемого субъекта, в частности, беременного субъекта, на которое указывает изменение общей ориентации субъекта. Способ, описанный применительно к фиг. 7 и изображенный на ней, может быть объединен со способом, описанным со ссылкой на фиг. 5. В частности, информация о статусе, описывающая уровень относительного движения между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения, может быть использована в качестве отправной точки. Когда уровень относительного движения между блоком первых датчиков движения и блоком вторых датчиков движения указывает на по существу стабильные условия измерения, может быть задействован способ, изображенный на фиг. 7.
На первом этапе 200 может быть предусмотрен блок первых датчиков движения, содержащий по меньшей мере один первый датчик движения. Предпочтительно по меньшей мере один первый датчик движения связан с первым преобразователем (или преобразователем фетального мониторинга), в частности, механически соединен с ним. По меньшей мере один первый датчик движения может быть приложен к абдоминальной области беременного субъекта. По меньшей мере один первый датчик движения может быть связан с по меньшей мере одним преобразователем фетального мониторинга, детектирующим информацию о медицинском состоянии плода. На последующем этапе 202 по меньшей мере один первый датчик движения может использоваться для детектирования движения. Например, по меньшей мере один первый датчик движения может быть реализован в виде одного или более датчиков ускорения.
На этапе 204, параллельном или смещенным во времени относительно этапа 200, может быть предусмотрен блок вторых датчиков движения, содержащий по меньшей мере один второй датчик движения. Предпочтительно по меньшей мере один второй датчик движения связан со вторым преобразователем (или преобразователем мониторинга матери), в частности, механически соединен с ним. По меньшей мере один второй датчик движения может быть приложен к абдоминальной области беременного субъекта. По меньшей мере один второй датчик движения может быть связан с по меньшей мере одним преобразователем мониторинга матери, детектирующим информацию о медицинском состоянии матери. На последующем этапе 206 по меньшей мере один второй датчик движения может использоваться для детектирования движения. Например, по меньшей мере один второй датчик движения может быть реализован в виде одного или более датчиков ускорения. Предпочтительно по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения смещены относительно друг друга при прикладывании к абдоминальной области беременного субъекта. Этапы 202, 206 могут покрывать определенный временной интервал, например, интервал в одну секунду.
Далее может следовать этап 208, содержащий этап определения информации об общей ориентации, в частности, этап детектирования положения тела на основании сигналов движения, предоставляемых по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. Этап 208 может также включать обработку информации об относительном движении, указывающей на относительное движение между по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения. Последующий этап 212 может быть направлен на определение изменения положения тела наблюдаемого субъекта. В этой связи, например, информация о фактическом положении тела, предоставляемая по меньшей мере одним первым датчиком движения и по меньшей мере одним вторым датчиком движения, может быть сравнена с информацией о базовом положении тела. Поэтому предпочтительно, чтобы на этапе определения изменения положения тела можно было использовать данные, представленные в хранилище 210 данных, в котором хранится информация об абсолютной и/или относительной общей ориентации, например, информация о положении тела. В этой связи следует отметить, что детектирование изменения положения тела может быть направлено на детектирование характерных изменений положения тела, которые могут также вызвать отсроченное изменение положения тела плода. Как уже было указано выше, по меньшей мере в некоторых вариантах осуществления изобретения детектирование общего уровня относительного движения может быть использовано для предотвращения дальнейшей обработки информации о медицинском состоянии, когда уровень превышает определенное пороговое значение.
На этапе 214, следующем за этапом 212, может быть принято решение или проведена классификация, указывающая на уровень изменения положения тела. Этап 214 может содержать сравнение порогового и фактического значений. Если фактический уровень изменения положения тела превышает заданное пороговое значение, то способ может переходить к этапу 216, на котором активируется режим приостановки. Другими словами, когда беременная женщина испытывает определенное изменение в положении тела, например, при раскачиваниях и поворотах, плод обычно следует за общим изменением ориентации с некоторым временным запаздыванием. Когда фактический уровень относительного движения превышает заданное пороговое значение, может быть подан явный знак о том, что первичный сигнал (или основной сигнал, представляющий интерес), по всей вероятности, искажен шумами или, более конкретно, искажен движением, так что мероприятия по дальнейшей обработке сигнала должны быть предотвращены. В настоящей заявке первичный сигнал может включать информацию о медицинском состоянии плода и/или информацию о медицинском состоянии матери. На этапе 218, следующим за периодом приостановки, обработка информации о медицинском состоянии может быть, наконец, продолжена.
В случае если фактический уровень изменения положения тела остается или опускается ниже заданного порогового значения, то способ может переходить к этапу 220, на котором активируется режим разблокирования. Когда фактический уровень относительного движения опускается ниже заданного порогового значения, может быть подан явный знак о том, что первичный сигнал (или основной сигнал, представляющий интерес), скорее всего, по существу не искажен, так что мероприятия по дальнейшей обработке сигнала могут быть разрешены.
Разумеется, формулировка "превышает заданное пороговое значение" и "опускается ниже заданного порогового значения" представлена выше прежде всего для пояснительных целей и не ограничивает объем изобретения. Этапы 208-220 могут повторяться в непрерывном или квазинепрерывном режиме, например, во время проведения процедуры медицинского мониторинга.
Далее представлены иллюстративные высокоуровневые алгоритмы, в которых могут использоваться различные аспекты настоящего изобретения, как описано выше. В частности, алгоритмы могут быть использованы при осуществлении способа в соответствии с настоящим изобретением. Алгоритм и соответствующий способ могут должным образом обрабатывать данные или, в более общем смысле, сигналы, предоставленные по меньшей мере двумя блоками датчиков движения.
Предпочтительно по меньшей мере первый датчик движения блока первых датчиков движения связан с преобразователем фетального мониторинга. Предпочтительно по меньшей мере второй датчик движения блока вторых датчиков движения связан с преобразователем мониторинга матери. Таким образом, датчики могут быть соединены с соответствующим им преобразователем мониторинга. Однако, в некоторых вариантах применения может быть достаточно, чтобы датчики движения были расположены вблизи соответствующего им преобразователя мониторинга. Следовательно, применяемый в настоящей заявке термин "связанный" в любом случае не должен толковаться ограничительным образом, как требующий механического соединения между датчиками движения и соответствующими им преобразователями мониторинга.
Как правило, алгоритмы, соответствующие способы и системы основаны на понимании того, что применение нескольких датчиков движения, например, нескольких акселерометров, может позволить детектировать и различать между изменениями положения тела матери, нежелательными движениями и изменениями ориентации преобразователей. Таким образом, может быть сформирован сигнал, который выборочно разрешает или предотвращает генерирование сигналов преобразователей и/или дальнейшую обработку сгенерированных преобразователями сигналов. В качестве примера индикация шевеления плода или индикация частоты сердечных сокращений плода может быть подавлена в случае детектирования искажающих двигательных событий.
Как правило, уровни движения и ориентации могут быть оценены на протяжении коротких временных интервалов, например, в пределах одной секунды. Однако, картина движения может оцениваться на протяжении более длинных временных интервалов. Следовательно, описанные ниже алгоритмы могут повторно выполняться для соответствующих временных интервалов. Также могут быть предусмотрены скользящие временные интервалы. Эталонные значения, используемые в любом из алгоритмов, могут храниться в соответствующих буферных устройствах для обеспечения сравнения между текущими и предыдущими и/или предварительно заданными значениями.
Любой алгоритм может состоять из нескольких стандартных подпрограмм, описанных ниже. Для иллюстративных целей преобразователь мониторинга матери здесь и далее будет именоваться токодинамометрическим преобразователем. Для иллюстративных целей преобразователь фетального мониторинга далее будет именоваться ультразвуковым преобразователем. Для иллюстративных целей по меньшей мере один первый датчик движения и по меньшей мере один второй датчик движения далее будут именоваться акселерометр для ультразвукового преобразователя и акселерометр для токодинамометрического преобразователя соответственно. Дополнительно, можно предположить, для простоты, что акселерометры интегрированы, и соответствующие преобразователи интегрированы в общий корпус.
А) Подпрограмма оценки движения для акселерометра, интегрированного в корпус ультразвукового преобразователя:
Вычислить уровень движения акселерометра, интегрированного в корпус ультразвукового преобразователя, и добавить его значение в соответствующий буфер. Применить сравнение с пороговым значением уровня движения для получения двоичного решения в отношении уровня движения для ультразвукового преобразователя.
Вычислить ориентацию акселерометра ультразвукового преобразователя и добавить ее значение в соответствующий буфер. Сравнить фактическую ориентацию с предыдущей ориентацией(-иями), учитывая при этом вычисленный уровень движения акселерометра, интегрированного в корпус ультразвукового преобразователя. Определить, изменилась ли ориентация акселерометра ультразвукового преобразователя для получения двоичного сигнала.
Определить общую картину движения для акселерометра ультразвукового преобразователя.
В качестве примера общая картина движения может состоять из нескольких относящихся к движению параметров, указывающих на направление движения, величину (или расстояние) и т.д.
В) Подпрограмма оценки движения для акселерометра, интегрированного в корпус токодинамометрического преобразователя:
Вычислить уровень движения акселерометра, интегрированного в корпус токодинамометрического преобразователя, и добавить его значение в соответствующий буфер. Применить сравнение с пороговым значением уровня движения для получения двоичного решения в отношении уровня движения для токодинамометрического преобразователя.
Вычислить ориентацию токодинамометрического преобразователя и добавить ее значение в соответствующий буфер. Сравнить фактическую ориентацию с предыдущей ориентацией(-иями), учитывая при этом вычисленный уровень движения токодинамометрического преобразователя. Определить, изменилась ли ориентация акселерометра токодинамометрического преобразователя для получения двоичного сигнала.
Определить общую картину движения для акселерометра токодинамометрического преобразователя.
Дополнительно, может быть предпочтительно, чтобы был применен по меньшей мере один датчик движения (или акселерометр), который присоединяют к абдоминальной области матери с тем, чтобы обеспечить по существу независимые эталонные данные.
С) Подпрограмма оценки движения для акселерометра, прикладываемого к абдоминальной области матери:
Вычислить уровень движения акселерометра абдоминальной области матери и добавить его значение в соответствующий буфер. Применить сравнение с пороговым значением уровня движения для получения двоичного решения в отношении уровня движения для преобразователя абдоминальной области матери.
Вычислить ориентацию преобразователя абдоминальной области матери и добавить ее значение в соответствующий буфер. Сравнить фактическую ориентацию с предыдущей ориентацией(-иями), учитывая при этом вычисленный уровень движения преобразователя абдоминальной области матери.
Определить, изменилась ли ориентация акселерометра преобразователя абдоминальной области матери для получения двоичного сигнала.
Определить общую картину движения для акселерометра, приложенного к абдоминальной области матери.
D) Оценивание и примеры оценки движения:
Вышеописанные данные, полученные наряду с данными, детектированными ультразвуковым преобразователем и/или токодинамометрическим преобразователем, могут быть оценены для того, чтобы еще больше повысить точность и надежность мониторинга. Например, в системе мониторинга может быть предусмотрен ультразвуковой преобразователь (как правило, преобразователь фетального мониторинга), выполненный с возможностью детектирования сигнала, указывающего на информацию о частоте сердечных сокращений плода. Дополнительно, в более общем смысле, ультразвуковой преобразователь может быть выполнен с возможностью детектирования сигнала, указывающего на шевеление плода.
Если только подмножество акселерометров, используемых в текущей схеме, например, только один акселерометр, указывает на то, что произошло изменение ориентации, или что имел место значительный уровень движения, может быть сделан вывод о том, что задействованный акселерометр(-ы) в настоящий момент испытывает паразитное движение, например, вызванное ошибками функционирования. Следовательно, фактическая обработка и/или передача необходимой информации о медицинском состоянии может быть подавлена.
Если каждый акселерометр, используемый в текущей схеме, указывает на то, что произошло изменение ориентации, и что соответствующая общая картина движения по существу сходна, т.е. что изменения ориентации согласуются, то может быть сделан вывод о том, что произошло "подлинное" изменение положения тела, а не нежелательное движение одного акселерометра по причине, например, неправильного обращения. Следовательно, может быть активирован временный защитный интервал для подавления обработки и/или передачи информации о медицинском состоянии в течение определенного временного интервала.
Если каждый акселерометр, используемый в текущей схеме, указывает на то, что произошло движение, и что соответствующий уровень движения весьма высок, т.е. превышено пороговое значение движения, то может быть сделан вывод о том, что произошло "подлинное" общее движение, а не нежелательное движение одного акселерометра, например, по причине неправильного обращения. Следовательно, может быть активирован временный защитный интервал для подавления обработки и/или передачи информации о медицинском состоянии в течение определенного временного интервала.
Несмотря на то что изобретение изображено и описано подробно на чертежах и в предшествующем описании, такое изображение и описание должны рассматриваться в качестве примеров и иллюстрации, а не в качестве ограничения; настоящее изобретение не ограничено представленными вариантами осуществления. Другие вариации раскрытых вариантов осуществления изобретения могут быть понятны и реализованы специалистами в данной области техники при осуществлении заявленного изобретения на основании изучения чертежей, текста описания и прилагаемой формулы изобретения.
В пунктах формулы изобретения слово "содержащий" не исключает другие элементы или этапы, а неопределенный артикль “a” или “an” английского языка не исключает множественного числа. Отдельный элемент или другой блок может выполнять функции нескольких элементов, указанных в формуле изобретения. Сам факт того, что определенные меры указаны в различных зависимых пунктах формулы изобретения, не свидетельствует о том, что сочетание этих мер не может быть использовано с выгодой.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптическое запоминающее устройство или твердотельный носитель информации, поставляемые вместе с другими аппаратными средствами или как часть этих средств, но может также распространяться и в другой форме, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные обозначения в формуле изобретения не должны толковаться, как ограничивающие объем изобретения.
Реферат
Группа изобретений относится к медицине. Группа изобретений представлена системой, способом и машиночитаемым носителем для мониторинга беременности. Система (10) содержит преобразователь (20) фетального мониторинга, детектирующий информацию о медицинском состоянии плода, блок (30) первых датчиков движения, связанный с преобразователем (20) фетального мониторинга и содержащий по меньшей мере один первый датчик (70, 72) движения. Также содержит блок (32) вторых датчиков движения, содержащий по меньшей мере один второй датчик (70, 72) движения и устройство (48) управления. Устройство (48) управления содержит блок (50) оценки, определяющий относительное движение между блоком (30) первых датчиков движения и блоком (32) вторых датчиков движения. Причем устройство (48) управления выборочно разрешает в режиме разблокирования обработку детектированной информации о медицинском состоянии плода, когда уровень относительного движения между блоком (30) первых датчиков движения и блоком (32) вторых датчиков движения указывает на стабильные условия измерения. И выборочно предотвращает в режиме блокирования обработку детектированной информации о медицинском состоянии плода, когда уровень относительного движения между блоком (30) первых датчиков движения и блоком (32) вторых датчиков движения указывает на нестабильные условия измерения. Группа изобретений позволяет точно и надежно провести мониторинг беременности, уменьшить ошибки измерений, связанные с движениями за счет комплексной обработки помех и/или погрешностей при осуществлении мониторинга. 3 н. и 12 з.п. ф-лы, 7 ил.
Комментарии