Устройство для управления силой, требуемой для нажатия педали акселератора - RU2527624C2
Код документа: RU2527624C2
Чертежи




Описание
Область техники, к которой относится изобретения
[0001] Настоящее изобретение относится к устройству управления усилием на педали акселератора, чтобы управлять усилием на педали акселератора транспортного средства.
Уровень техники
[0002] В патентном документе 1 раскрыта технология, в которой раскрытое изобретение применяется к двигателю. В этом двигателе выполняется переключение между первой приводной системой (например, с однородным сгоранием) на стороне с высоким числом оборотов и высокой нагрузкой и второй приводной системой (например, со сгоранием послойного заряда топлива) на стороне с низким числом оборотов и низкой нагрузкой, которая имеет более высокую эффективность использования топлива, чем первая приводная система. Когда область работы двигателя переключается со второй области работы, в которой работает вторая приводная система, на первую область работы, в которой работает первая приводная система, сила реакции при нажатии (усилие на педали) педали акселератора резко увеличивается на заданное приращение усилия на педали на стадии, на которой область работы двигателя входит в граничную область работы непосредственно перед тем, как область работы двигателя переключается на первую область работы.
Кроме того, данное приращение усилия на педали сбрасывается, когда область работы возвращается от граничной области работы ко второй области работы.
Опубликованные документы
[0003] Патентный документ 1. Первая публикация заявки на патент (Япония) (tokkai) № 2003-120339.
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Целью технологии в вышеописанном патентном документе 1 является снижение расхода топлива. Кроме того, с вышеописанной граничной областью работы в качестве границы выполняется сброс усилия на педали акселератора и приращения усилия на педали. Тем не менее педаль акселератора является главным элементом манипуляции, когда водитель транспортного средства управляет транспортным средством намеченным водителем транспортного средства способом, и ощущение от работы, которое водитель транспортного средства физически испытывает, и вытекающее из этого влияние на общую характеристику управляемости транспортного средства является очень важным, с тем чтобы обеспечивать прямую связь с оценкой качества всего транспортного средства. Следовательно, когда такой вид устройства управления усилия на педали в качестве средства содействия в уменьшении расхода топлива вводится в практическое применение, необходимо в большей степени координировать уменьшение расхода топлива и ощущение от работы педали акселератора и удобство использования транспортного средства.
[0005] Авторы настоящего изобретения провели много испытаний и многократно выполняли дорожные испытания, чтобы создать такой вид устройств управления усилием на педали в качестве средства содействия в уменьшении расхода топлива для практического применения. Согласно этим испытаниям, определено то, что водитель транспортного средства ощущает чрезмерный дискомфорт на своей ноге, и не является предпочтительным случай, если усилие на педали увеличивается просто в соответствии с углом открытия акселератора. Более конкретно, такой вид устройств управления усилием на педали, как описан выше, резко увеличивает усилие на педали акселератора в середине операции ускорения водителем транспортного средства. Следовательно, даже в случае высокого требуемого ускорения, например, когда выполняется правый поворот после ожидания переключения светофора или левый поворот после ожидания переключения светофора, ускорение намеченным водителем способом не может быть реализовано, и достаточно быстро возникает такое последствие, что у водителя транспортного средства возникает неудовлетворенность. Кроме того, понятно, что возникает некоторое недопонимание в том, что вождение является вождением транспортного средства, характеристики ускорения которого являются слабыми.
Средства решения проблем
[0006] Следовательно, согласно настоящему изобретению, в устройстве управления усилием на педали акселератора, в котором, когда угол открытия акселератора становится больше заданного порогового значения угла открытия акселератора, усилие на педали акселератора увеличивается так, что оно превышает базовое усилие на педали на заданное приращение усилия на педали, приращение усилия на педали или пороговое значение угла открытия акселератора, при котором выполняется приращение усилия на педали, задается с учетом угла поворота рулевого колеса транспортного средства и, в более широком смысле, сопротивления движению, которое предоставляет фактор, определяющий рабочие характеристики ускорения транспортного средства.
[0007] Т.е., согласно первому варианту осуществления изобретения, устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с сопротивлением движению транспортного средства так, что приращение усилия на педали, когда сопротивление движению транспортного средства является большим, относительно меньше приращения усилия на педали, когда сопротивление движению транспортного средства является небольшим.
[0008] Кроме того, согласно второму варианту осуществления изобретения, устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с углом поворота рулевого колеса транспортного средства так, что приращение усилия на педали, когда угол поворота рулевого колеса является большим, задается относительно меньшим приращения усилия на педали, когда угол поворота рулевого колеса является небольшим.
[0009] Кроме того, согласно третьему варианту осуществления изобретения, устройство управления усилием на педали акселератора задает пороговое значение угла открытия акселератора в соответствии с углом поворота рулевого колеса так, что пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является большим, относительно превышает пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является небольшим.
[0010] Следует отметить, что, помимо использования фактического значения определения угла поворота рулевого колеса, «для угла поворота рулевого колеса» может использоваться прогнозирование или оценка варьирования (увеличения) будущего угла поворота колес на основе информации левого или правого поворота транспортного средства согласно работе либо левого, либо правого указателя поворота или через автомобильную навигационную систему.
Преимущества изобретения
[0011] Поскольку, согласно настоящему изобретению, когда водитель транспортного средства нажимает педаль акселератора, усилие на педали акселератора увеличивается так, что оно превышает базовое усилие на педали в области, в которой угол открытия акселератора превышает пороговое значение угла открытия акселератора, чрезмерное нажатие педали акселератора подавляется, и может быть реализовано уменьшение расхода топлива.
[0012] Затем, при условии большого сопротивления движению, обычно, при условии большого угла поворота рулевого колеса, больший угол открытия акселератора необходим для намерения водителя транспортного средства ускорять транспортное средство. Следовательно, если усилие на педали акселератора увеличивается, водитель транспортного средства не может нажимать педаль акселератора в достаточной степени, так что транспортное средство не может ускоряться в достаточной степени. Тем не менее, согласно настоящему изобретению, приращение усилия на педали в это время становится небольшим. Следовательно, такое неприятное ощущение, что водитель ощущает дискомфорт на своей ноге вследствие увеличения усилия на педали, может подавляться и сдерживаться, и становится возможным выполнять ускорение транспортного средства в соответствии с намерением водителя транспортного средства.
Краткое описание чертежей
[0013] Фиг.1 является пояснительным видом примера конфигурации системы устройства управления усилием на педали акселератора согласно настоящему изобретению.
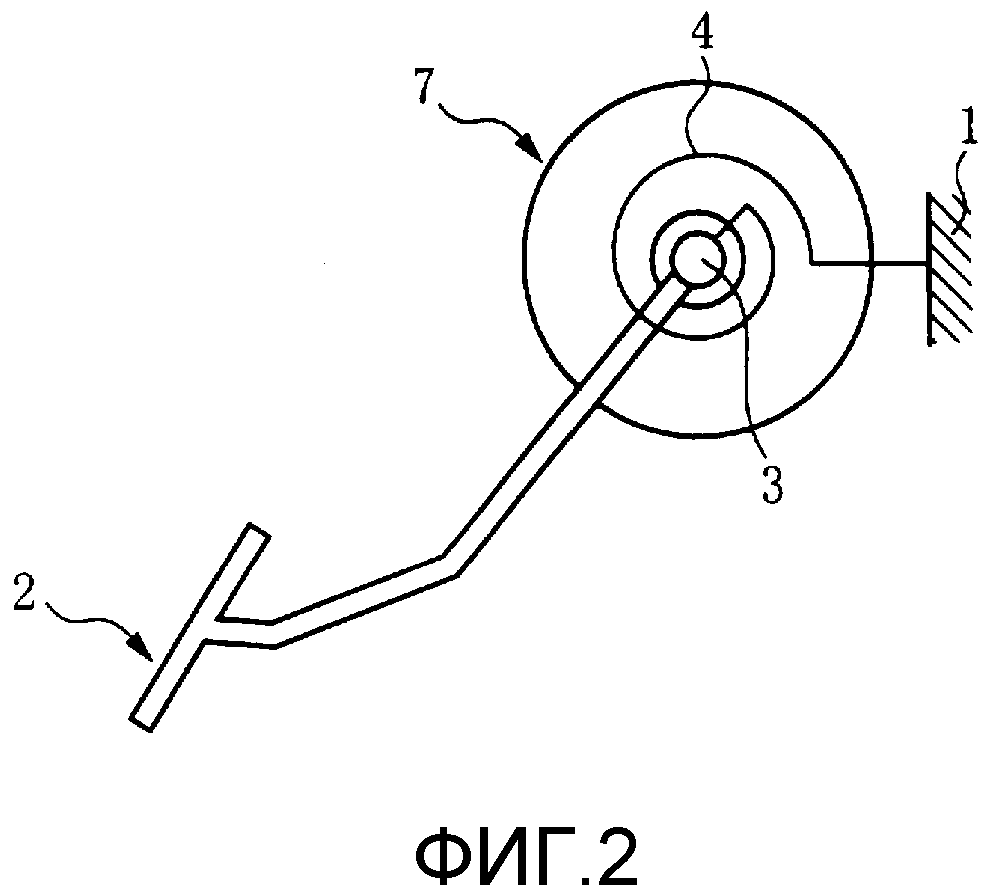
Фиг.2 является пояснительным видом, схематично представляющим пример механизма модификации усилия на педали согласно настоящему изобретению.
Фиг.3 является характерным графиком, представляющим один пример характеристики усилия на педали акселератора согласно настоящему изобретению.
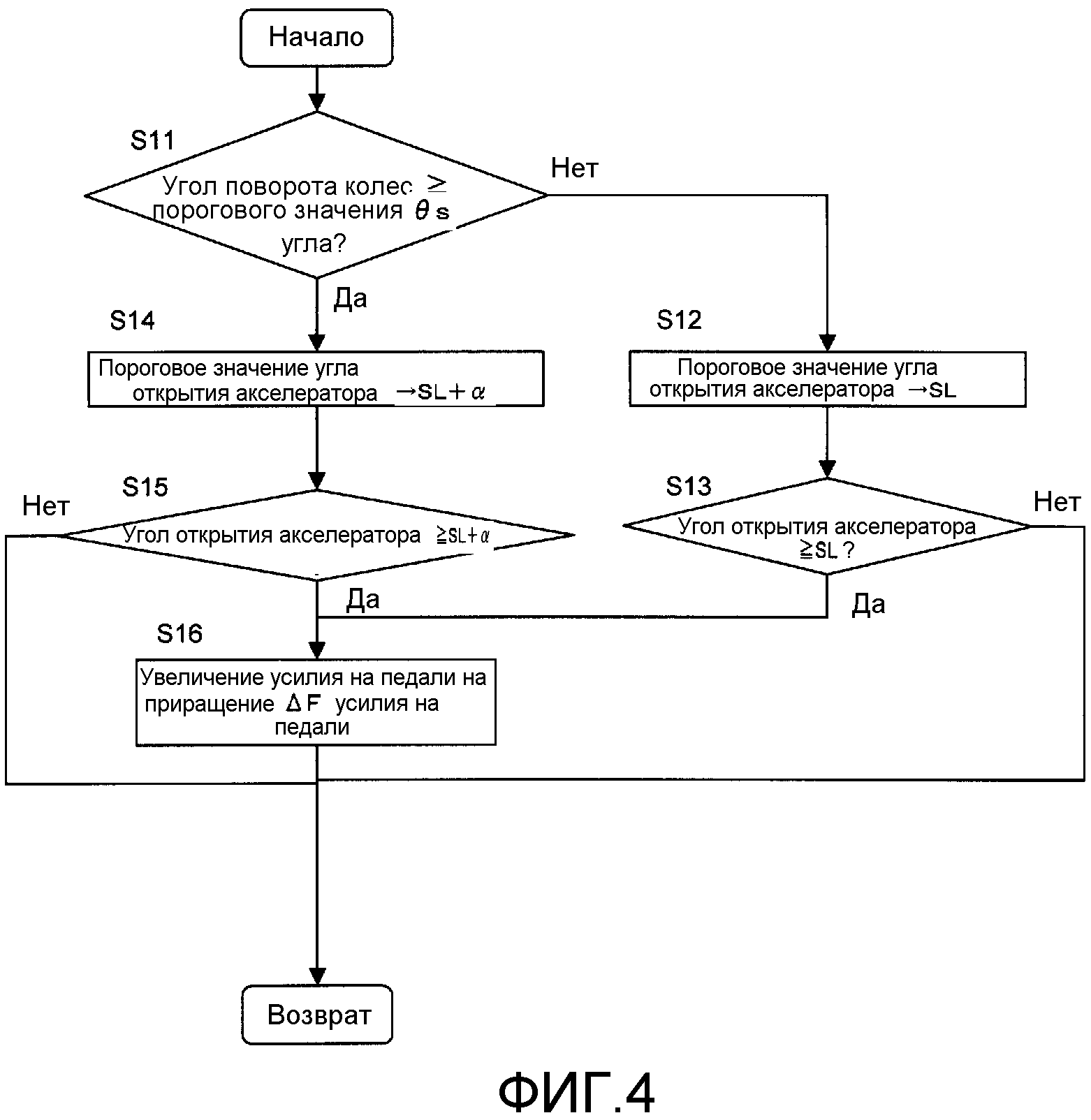
Фиг.4 является блок-схемой последовательности операций способа, представляющей последовательность операций управления во втором варианте осуществления согласно настоящему изобретению.
Фиг.5 является временной диаграммой, представляющей изменения во времени угла открытия педали акселератора, угла поворота рулевого колеса, приращения усилия на педали и скорости транспортного средства в первом предпочтительном варианте осуществления согласно настоящему изобретению.
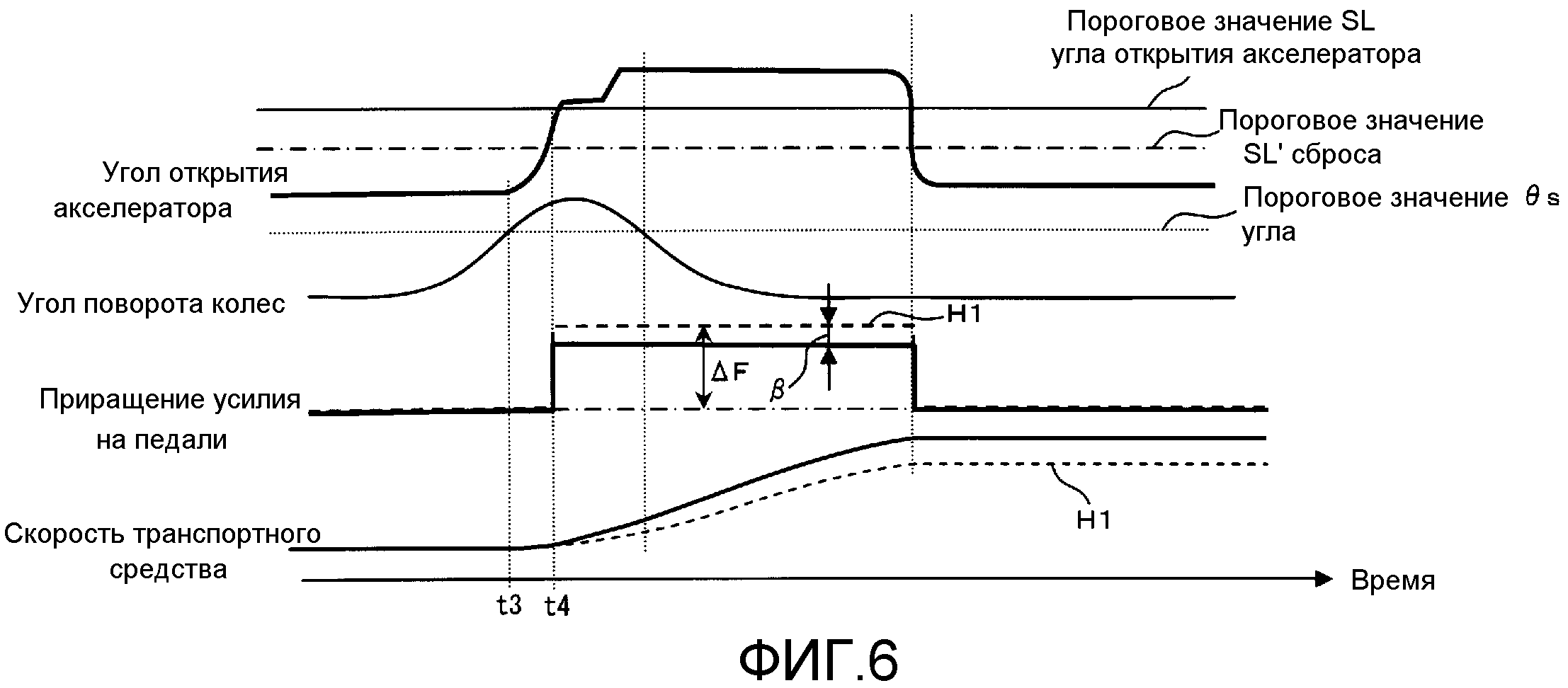
Фиг.6 является временной диаграммой, представляющей изменения во времени угла открытия педали акселератора, угол поворота рулевого колеса, приращения усилия на педали и скорости транспортного средства во втором предпочтительном варианте осуществления согласно настоящему изобретению.
Фиг.7 является временной диаграммой в случае, если угол поворота рулевого колеса увеличивается после увеличения угла открытия акселератора во втором варианте осуществления, описанном выше.
Фиг.8 является характерным графиком, представляющим взаимосвязь между углом поворота рулевого колеса и сопротивлением движению.
Подробное описание вариантов осуществления изобретения
[0014] Далее подробно описываются предпочтительные варианты осуществления согласно настоящему изобретению на основе чертежей. Устройство управления усилием на педали акселератора согласно настоящему изобретению, по существу, является устройством для того, чтобы регулируемо управлять усилием на педали (силой реакции манипуляции) педали 2 акселератора, установленной в кузове 1 транспортного средства (не показано). Как описано ниже, устройство управления усилием на педали акселератора содержит детектор угла открытия акселератора в качестве средства для определения угла открытия (величины нажатия) педали 2 акселератора, смонтированной в транспортном средстве, и узел модификации усилия на педали в качестве средства для модификации усилия на педали 2 акселератора от базового усилия на педали, при этом усилие на педали 2 акселератора увеличивается до значения выше базового усилия на педали в области, в которой угол открытия педали 2 акселератора превышает заданное пороговое значение угла открытия акселератора.
[0015] Педаль 2 акселератора установлена на вращательном валу 3 и качающимся образом двигается с вращательным валом 3 в качестве опоры, как показано на фиг.1 и 2. Сила реакции в направлении закрытия акселератора обеспечивается посредством возвратной пружины 4 в одной из различных форм. Один конец возвратной пружины 4 прикреплен к кузову 1 транспортного средства, а другой конец возвратной пружины 4 - к вращательному валу 3. Кроме того, один конец вращательного вала 3 поддерживается с возможностью вращения на кузове 1 транспортного средства через подшипник 5, а датчик 6 положения акселератора устанавливается в качестве узла определения угла открытия акселератора в непосредственной близости с другим концом вращательного вала 3.
[0016] Следует отметить, что в этом варианте осуществления величина нажатия педали 2 акселератора (угол открытия акселератора) и угол открытия дроссельного клапана (не показан) двигателя внутреннего сгорания (не показан) взаимосвязаны, так что угол открытия дроссельного клапана двигателя внутреннего сгорания увеличивается в соответствии с величиной нажатия педали 2 акселератора. Более конкретно, величина впрыска топлива (и в свою очередь, расход топлива) увеличивается в соответствии с углом открытия акселератора.
[0017] Далее, механизм модификации усилия на педали включает в себя: регулируемый фрикционный диск 7, в котором находится пара фрикционных элементов 7a, 7b, которые обеспечивают силу трения для поворота вращательного вала 3. Один из пары фрикционных элементов 7a механически фиксируется на концевой секции вращательного вала 3, а другой из пары фрикционных элементов 7b поддерживается с возможностью перемещения в осевом направлении неподвижного вала 8 и без возможности вращения на неподвижном валу 8 через шлиц и т.п. Вышеописанный неподвижный вал 8 фиксированным образом поддерживается на кузове 1 транспортного средства. Кроме того, исполнительный механизм (например, электромагнитный соленоид) 9, который смещает вышеописанный фрикционный элемент 7b к фрикционному элементу 7a, закреплен на кузове 1 транспортного средства.
[0018] Вышеописанный регулируемый фрикционный диск 7 перемещает фрикционный элемент 7b в осевом направлении согласно работе исполнительного механизма 9 (направление метки A1 со стрелкой на фиг.1) так, что сила трения между фрикционным элементом 7a и фрикционным элементом 7b регулируемо управляется. Работа этого исполнительного механизма 9 управляется посредством блока 10 управления. Следовательно, блок 10 управления управляет приведением в действие исполнительного механизма 9 так, что сила трения, передаваемая вращательному валу 3, и, в свою очередь, усилие на педали 2 акселератора во время нажатия педали 2 акселератора могут быть модифицированы.
[0019] Блок 10 управления вводит сигналы датчиков различных видов, таких как датчик 11 ускорения, который определяет уклон дороги из наклона транспортного средства; датчик 12 атмосферного давления, который определяет окружающее атмосферное давление вокруг транспортного средства; датчик 13 температуры всасываемого воздуха, который определяет температуру всасываемого воздуха; датчик 14 скорости транспортного средства, определяющий скорость транспортного средства; датчик 15 давления на сиденье, встроенный в сиденье транспортного средства, чтобы определять, находится ли пассажир транспортного средства на борту или нет; датчик 16 положения зубчатой передачи, который определяет передаточное отношение трансмиссии; и т.д., в дополнение к вышеописанному датчику 6 положения акселератора, определяющему угол открытия педали 2 акселератора. Кроме того, сигналы из датчика 19 угла поворота колес, определяющего угол поворота рулевого колеса транспортного средства, и из датчика 20 указателя поворота для определения работы любого из левого или правого указателя поворота вводятся в блок 10 управления в дополнение к информации из автомобильной навигационной системы 17, из которой доступна картографическая информация относительно текущего положения транспортного средства и окрестностей текущего положения, и сигнал из лазерного радара 18, который определяет расстояние между транспортными средствами между самим транспортным средством и едущим впереди транспортным средством.
[0020] Следует отметить, что, например, бесступенчатая трансмиссия, которая непрерывно варьирует передаточное отношение трансмиссии, может быть использована в качестве трансмиссии, но автоматическая трансмиссия такого типа, в котором механизм ступенчатой трансмиссии комбинируется с преобразователем крутящего момента или механической коробкой передач, может быть альтернативно использована. Также следует отметить, что, в случае использования бесступенчатой трансмиссии, можно определять передаточное отношение трансмиссии как соотношение частот вращения между стороной входного вала и стороной выходного вала.
[0021] На фиг.3 примерно показана характеристика усилия на педали акселератора в вышеописанном варианте осуществления. Базовое усилие на педали, т.е. базисное усилие на педали увеличивается приблизительно пропорционально углу открытия акселератора, в то время как обеспечивается надлежащий гистерезис в направлении увеличения угла открытия педали 2 акселератора и в направлении снижения угла открытия. В ходе работы педали акселератора в направлении увеличения угла открытия, а именно, когда, во время нажатия педали 2 акселератора, угол открытия акселератора становится больше заданного порогового значения угла открытия акселератора (ссылка с номером SL на фиг.3), усилие на педали акселератора увеличивается ступенчатым образом до значения выше базового усилия на педали.
Как описано выше, поскольку усилие на педали акселератора увеличивается ступенчатым образом, большее нажатие педали 2 акселератора водителем естественно сдерживается, и, одновременно, такая информация, что состояние вождения переключается с состояния, в котором уровень расхода топлива является низким (т.е. экономия топлива существенная), к состоянию, в котором уровень расхода топлива является высоким (т.е. плохая экономия топлива), может определенно сообщаться водителю транспортного средства.
[0022] Следует отметить, что увеличение усилия на педали 2 акселератора в вышеописанном направлении увеличения угла открытия акселератора может быть сброшено сразу, когда рабочее направление педали 2 акселератора изменяется на противоположное направление снижения угла открытия акселератора, или может быть сброшено, когда угол открытия акселератора снижается до значения, равного или ниже вышеописанного заданного угла открытия.
[0023] На фиг.4 показана блок-схема последовательности операций способа, представляющая последовательность операций управления в этом предпочтительном варианте осуществления. На этапе S11, блок 10 управления определяет то, равен или превышает, либо нет угол поворота рулевого колеса транспортного средства заданное пороговое значение θs угла. Если угол поворота колес меньше заданного порогового значения угла, процедура переходит к этапу S12. На этапе S12, блок 10 управления задает пороговое значение угла открытия акселератора равным заданному опорному значению SL, заданному с учетом рабочих характеристик расхода топлива. Затем, если угол открытия акселератора равен или превышает это пороговое значение SL угла открытия акселератора, процедура переходит от этапа S13 к этапу S16. На этапе S16, блок 10 управления увеличивает усилие на педали для базового усилия на педали на заданное приращение ДF усилия на педали.
[0024] С другой стороны, если угол поворота колес равен или превышает заданное пороговое значение θs угла, процедура переходит к этапу S14. На этапе S14, пороговое значение угла открытия акселератора задается равным значению (SL+α), при котором дополнительное значение α добавляется к опорному значению SL. Затем, если угол открытия акселератора становится равным или превышающим пороговое значение угла открытия акселератора (SL+α) после увеличения, процедура переходит от этапа S15 к этапу S16, на котором усилие на педали увеличивается для базового усилия на педали на заданное приращение ΔF усилия на педали.
[0025] Согласно этому варианту осуществления, как показано на фиг.5, в случае, когда угол открытия педали 2 акселератора увеличивается, в то время как угол поворота колес увеличивается, например, в ходе левого поворота или правого поворота из остановленного состояния, например, в случае ожидания переключения сигнала светофора, пороговое значение угла открытия акселератора модифицируется до значения на стороне приращения (SL+α) в момент t1 времени, в который угол поворота колес превышает пороговое значение θs угла. Следовательно, увеличение усилия на педали к моменту t2 времени, в который угол открытия акселератора является относительно большим, не возникает, и разрешается быстрое нажатие педали 2 акселератора только посредством базового усилия на педали.
Таким образом, плавное ускорение транспортного средства становится возможным, по сравнению с характеристикой H1 (характеристикой, обозначаемой посредством пунктирной линии на фиг.5) первого сравнительного примера, в котором пороговое значение угла открытия акселератора не модифицируется в соответствии с углом поворота колес.
[0026] Следует отметить, что пороговое значение SL' сброса, чтобы сбрасывать приращение усилия на педали, предварительно устанавливается равным значению ниже порогового значения SL угла открытия акселератора, но, в этом варианте осуществления, данное пороговое значение SL' сброса также задается в соответствии с пороговым значением θs угла управляемых колес транспортного средства. Другими словами, если угол поворота рулевого колеса равен или превышает пороговое значение θs угла, пороговое значение SL' сброса задается относительно большим аналогично пороговому значению SL угла открытия акселератора, с тем чтобы поддерживать гистерезис между пороговым значением SL угла открытия акселератора и пороговым значением SL' сброса на идентичном уровне.
[0027] Далее второй предпочтительный вариант осуществления согласно настоящему изобретению поясняется со ссылкой на фиг.6 и 7. Во втором варианте осуществления, приращение ΔF усилия на педали 2 акселератора задается в соответствии с углом поворота рулевого колеса вместо порогового значения угла открытия акселератора в первом варианте осуществления. Т.е. приращение усилия на педали модифицируется в соответствии с углом поворота рулевого колеса таким образом, что приращение усилия на педали (ΔF-β), когда угол поворота рулевого колеса является большим, меньше на заданную величину β приращения ΔF базового усилия на педали, когда угол поворота рулевого колеса является небольшим. Более конкретно, когда угол поворота рулевого колеса равен или превышает заданное пороговое значение θs угла, приращение усилия на педали снижается так, что оно меньше предварительно установленного заданного опорного значения ΔF на заданный декремент в.
[0028] Согласно второму варианту осуществления, в случае, когда угол открытия педали 2 акселератора увеличивается, в то время как угол поворота рулевого колеса увеличивается, например, в случае, если транспортное средство поворачивает вправо или влево от времени, когда транспортное средство останавливается, чтобы ожидать переключения сигнал светофора, в момент t3 времени, в который угол поворота колес превышает заданное пороговое значение из угла, и в момент t4 времени, в который угол открытия акселератора превышает пороговое значение SL угла открытия акселератора, увеличение усилия на педали выполняется, и приращение усилия на педали, в это время, модифицируется до меньшего значения (ДF-β). Таким образом, впечатление, например, приращение усилия на педали может подавляться и сдерживаться, и плавное ускорение транспортного средства становится возможным по сравнению с характеристикой H1 сравнительного примера, в котором приращение усилия на педали не модифицируется в соответствии с углом поворота колес.
[0029] Кроме того, следует отметить, что в вышеописанном втором варианте осуществления, как показано на фиг.7, в случае, если угол поворота рулевого колеса превышает заданное пороговое значение из угла со времени, в которое угол открытия акселератора превышал пороговое значение SL угла открытия акселератора в случае, когда, например, руль управляется в значительной степени после ускорения, когда транспортное средство находится в остановленном состоянии, и транспортное средство поворачивает в направлении влево или вправо из остановленного состояния транспортного средства, приращение базового усилия на педали ДF дается в момент t5 времени, в который угол открытия акселератора превышает пороговое значение из угла открытия акселератора. После этого, в момент времени t6, в который угол поворота колес превышает заданное пороговое значение из угла, приращение усилия на педали (ДF-β) может быть задано небольшим. В этом случае, приращение усилия на педали постепенно уменьшается посредством ограничения темпа варьирования (скорости варьирования) приращения усилия на педали до заданного значения, предпочтительно, как обозначено посредством ссылки с номером f1 на фиг.7, с тем чтобы не вызывать у водителя неприятное ощущение, так что водитель транспортного средства ощущает дискомфорт на своей ноге относительно педали акселератора.
[0030] Следует отметить, что оба из первого варианта осуществления и второго варианта осуществления могут комбинироваться. Т.е., когда угол поворота рулевого колеса (сопротивление движению) является большим, пороговое значение угла открытия акселератора может быть задано большим, и, одновременно, приращение усилия на педали может быть задано небольшим.
[0031] Кроме того, пороговое значение угла открытия акселератора либо приращение усилия на педали, оба из которых служат для того, чтобы увеличивать усилие на педали 2 акселератора, может быть модифицировано в соответствии со скоростью транспортного средства, когда угол открытия педали 2 акселератора в ответ на манипуляцию водителем начинает увеличиваться (другими словами, скорость транспортного средства на начальной стадии, когда нажатие выполняется от полностью закрытого угла открытия акселератора или от определенного постоянного промежуточного угла открытия педали 2 акселератора). Более конкретно, в случае, если скорость транспортного средства, когда угол открытия педали 2 акселератора начинает увеличиваться, является низкой, пороговое значение угла открытия акселератора или приращение усилия на педали задается равным значению (SL+б), которое является относительно большим по сравнению со случаем высокой скорости транспортного средства, или задается равным значению (ДF-б), которое является относительно небольшим по сравнению со случаем высокой скорости транспортного средства. Таким образом, становится достаточно легко нажимать на педаль акселератора в случае, если скорость транспортного средства является низкой, например, в случае если транспортное средство поворачивает вправо или влево из остановленного состояния транспортного средства, ускорение транспортного средства в соответствии с намерением водителя транспортного средства становится возможным.
[0032] Из рабочего режима либо левого, либо правого указателя поворота и информации в автомобильной навигационной системе 17, варьирование (улучшение характеристик работы) рулевого колеса может быть заранее спрогнозировано, и задание порогового значения угла открытия акселератора или приращения усилия на педали может быть выполнено. Другими словами, в ходе работы либо левого, либо правого указателя поворота и в ходе инструкции левого или правого поворота от автомобильной навигационной системы 17, при допущении, что рулевое колесо управляется так, что угол поворота увеличивается, угол открытия акселератора предварительно устанавливается большим, или приращение усилия на педали задается небольшим. В этом случае, даже если угол открытия акселератора увеличивается до того, как водитель управляет углом поворота колес в ходе левого или правого поворота из остановленного состояния, пороговое значение угла открытия акселератора может сначала задаваться большим, или приращение усилия на педали может задаваться небольшим. Таким образом, большее ускорение транспортного средства в соответствии с намерением водителя транспортного средства может становиться возможным.
[0033] С другой стороны, когда угол поворота рулевого колеса увеличивается без работы левого или правого указателя поворота в случае, когда транспортное средство ставится в гараж, требуемое ускорение (намерение ускорения) является низким по сравнению с правым или левым поворотом транспортного средства, как описано выше, модификация порогового значения угла открытия акселератора и/или приращения усилия на педали в соответствии с углом поворота колес может запрещаться. Другими словами, только во время правого или левого поворота из остановленного состояния, модификация порогового значения угла открытия акселератора или приращения усилия на педали в соответствии с углом поворота колес, как описано выше, может быть выполнена.
[0034] Кроме того, когда транспортное средство поворачивает в направлении встречной полосы движения, в случае правого поворота, когда транспортное средство движется по левой полосе движения в системе левостороннего движения, правый поворот должен быстро завершаться до того, как встречное транспортное средство переходит на встречную полосу движения по сравнению с поворотом транспортного средства на полосе движения по направлению движения, так что возникает требование к высокому ускорению. Следовательно, в этом случае, когда транспортное средство поворачивает в направлении встречной полосы движения, предпочтительно задавать пороговое значение угла открытия акселератора относительно большим или задавать приращение усилия на педали относительно небольшим по сравнению со случаем, в котором транспортное средство поворачивает в направлении полосы движения.
[0035] На фиг.8 показана взаимосвязь между углом поворота рулевого колеса и сопротивлением движению.
Как показано на фиг.8, предусмотрена такая взаимосвязь, что по мере того, как угол поворота колес становится большим до некоторой степени, сопротивление движению становится резко большим. Следовательно, модификация порогового значения угла открытия акселератора или приращения усилия на педали в соответствии с параметром(ами), связанным с сопротивлением движению, может выполняться, в дополнение к углу поворота рулевого колеса, описанного выше. В частности, во избежание чрезмерного приращения усилия на педали вопреки большему сопротивлению движению транспортного средства, приращение усилия на педали может задаваться в соответствии с сопротивлением движению так, что приращение усилия на педали, когда сопротивление движению транспортного средства возникает, относительно меньшим приращения усилия на педали, когда сопротивление движению транспортного средства является небольшим.
[0036] Сопротивление движению транспортного средства является большим в случае, если градиент дороги (подъем считается положительным) является большим, или в случае, если посадочный вес транспортного средства согласно числу пассажиров транспортного средства является большим, в дополнение к скорости транспортного средства, описанной выше, и в качестве одного из параметров, представляющих сопротивление движению. Следовательно, приращение усилия на педали в случае, если градиент является большим, может задаваться относительно меньшим приращения усилия на педали в случае, если градиент является небольшим, или приращение усилия на педали в случае, если посадочный вес является большим, может задаваться относительно меньшим приращения усилия на педали в случае, если посадочный вес является небольшим. Следует отметить, что абсолютная величина сопротивления движению согласно этим параметрам может быть использована вместо сопротивления движению на основе скорости транспортного средства (главным образом, сопротивления воздуха или сопротивления качению), или, в качестве альтернативы, абсолютная величина сопротивления движению на основе скорости транспортного средства может быть использована вместо сопротивления движению.
[0037] Следует отметить, что градиент дороги может быть определен с использованием значения определения датчика 11 ускорения. В случае, если дорожная картографическая информация относительно текущего положения и окружения доступна из автомобильной навигационной системы 17, также можно определять градиент дороги в текущем местоположении на основе этой картографической информации. Число пассажиров транспортного средства может быть определено из сигналов датчиков 15 давления на сиденье, встроенных в сиденье.
[0038] Приращение усилия на педали, заданное на основе сопротивления движению транспортного средства, дополнительно может корректироваться согласно другим условиям. Приращение усилия на педали может корректироваться с использованием, например, плотности всасываемого воздуха двигателя внутреннего сгорания, режима вождения - спортивного режима или экономичного режима, расстояния между транспортными средствами между самим транспортным средством и едущим впереди транспортным средством, разности скоростей от текущей скорости транспортного средства до допустимого ограничения скорости и т.д.
[0039] Коррекция согласно плотности воздуха требуется для того, чтобы компенсировать уменьшение выходной мощности двигателя внутреннего сгорания вместе с уменьшением плотности воздуха в случае высокогорной местности, имеющей большую высоту, или в случае высокой температуры окружающей среды. По мере того, как плотность воздуха становится меньше, приращение усилия на педали становится меньше с учетом уменьшения выходной мощности двигателя внутреннего сгорания. Здесь следует отметить, что высота текущего местоположения транспортного средства может быть вычислена с использованием значения определения датчика 12 атмосферного давления, и в случае, если картографическая информация относительно текущего положения транспортного средства и его окружения доступна из автомобильной навигационной системы 17, можно определять высоту текущего местоположения на основе картографической информации. Можно определять температуру окружающей среды с использованием значения определения датчика 13 температуры всасываемого воздуха. Следует отметить, что плотность воздуха может быть определена непосредственно из значения определения датчика 12 атмосферного давления.
[0040] Коррекция согласно режиму вождения заключается в следующем. Т.е. в случае, если текущим режимом вождения является режим вождения, в котором требуемое ускорение водителя транспортного средства является высоким, приращение усилия на педали задается небольшим, так что выполняется ускорение в соответствии с намерением водителя транспортного средства. Следует отметить, что характер переключения передач, например, автоматической трансмиссии модифицируется в соответствии с выбором режима вождения, что является хорошо известным.
[0041] Определение режима вождения транспортного средства заключается в следующем. Т.е. в случае, если, например, переключатель выбора режима вождения присоединяется к транспортному средству, режим вождения может легко быть определен из положения этого переключателя выбора. В случае, если один из режимов вождения, имеющих высокое требуемое ускорение, выбирается согласно операции переключения передач водителем транспортного средства (например, спортивный режим), приращение усилия на педали может быть задано небольшим. Кроме того, после изучения тенденции вождения водителя транспортного средства из предыдущей ситуации вождения, стиль вождения, который водитель транспортного средства предпочитает, определяется как стиль вождения, имеющий большое требуемое ускорение, так что определение может выполняться так, что режим вождения, имеющий высокое требуемое ускорение, выбирается на постоянной основе.
[0042] Коррекция согласно расстоянию между транспортными средствами между самим транспортным средством и едущим спереди транспортным средством заключается в следующем. Т.е. по мере того как расстояние между транспортными средствами возрастает, приращение усилия на педали корректируется так, что по мере того как расстояние между транспортными средствами возрастает, приращение усилия на педали задается меньшим, а когда расстояние между транспортными средствами является небольшим, приращение усилия на педали задается относительно большим. Расстояние между транспортными средствами между самим транспортным средством и едущим впереди транспортным средством определяется посредством устройства определения расстояния между транспортными средствами с использованием лазерного радара 18. Это устройство определения расстояния между транспортными средствами испускает лазерное излучение в переднем направлении транспортного средства и принимает отраженный свет от едущего впереди транспортного средства, чтобы определять расстояние от едущего впереди транспортного средства.
[0043] Коррекция согласно разности между текущей скоростью транспортного средства и допустимым ограничением скорости дороги, по которой движется в данный момент транспортное средство (при условии, что текущая скорость транспортного средства ниже допустимого ограничения скорости), заключается в следующем. Т.е. картографическая информация относительно текущего положения транспортного средства и его окружения получается из автомобильной навигационной системы 17, допустимое ограничение скорости дороги, на которой движется в данный момент транспортное средство, определяется из картографической информации. Затем, в случае, если текущая скорость транспортного средства меньше допустимого ограничения скорости дороги, по которой движется в данный момент транспортное средство, приращение усилия на педали может корректироваться так, что оно меньше по мере того, как разность скоростей до допустимого ограничения скорости становится большей. Это обусловлено тем, что ускорение до допустимого ограничения скорости становится плавным, и, с другой стороны, ускорение транспортного средства, движущегося с допустимым ограничением скорости или выше, может быть затруднено.
[0044] Кроме того, как описано выше, приращение усилия на педали, определенное из сопротивления движению, корректируется согласно плотности воздуха, режиму вождения, расстоянию между транспортными средствами до едущего впереди транспортного средства, разности между текущей скоростью транспортного средства и допустимым ограничением скорости и т.д. Таким образом, более надлежащее улучшение характеристик работы педали 2 акселератора может выполняться, так что может быть реализовано плавное вождение, которое отражает намерение водителя транспортного средства.
[0045] Следует отметить, что в вышеописанном варианте осуществления, пороговое значение угла открытия акселератора или приращение усилия на педали модифицируется ступенчатым образом в случае, если угол поворота рулевого колеса является большим. Тем не менее настоящее изобретение не ограничено этим. Угол ходовых колес, который варьируется в соответствии с углом поворота рулевого колеса, может быть определен и использован для вышеописанного задания. Кроме того, взаимозаменяемое использование другого параметра, такого как скорость транспортного средства, связанная с вышеописанным сопротивлением движению, или комбинация скорости транспортного средства и другого параметра может быть употреблено.
[0046] Кроме того, в любом из вышеописанных вариантов осуществления, пороговое значение угла открытия акселератора или приращение усилия на педали модифицируется ступенчатым образом в случае, если угол поворота рулевого колеса является большим. Тем не менее пороговое значение угла открытия акселератора или приращение усилия на педали может модифицироваться непрерывно таким образом, что по мере того, как угол поворота рулевого колеса становится большим, пороговое значение угла открытия акселератора постепенно увеличивается, или приращение усилия на педали постепенно снижается.
[0047] Кроме того, со скоростью транспортного средства на начальной стадии операции увеличения угла открытия педали 2 акселератора водителем транспортного средства (нажатие из состояния полностью закрытого угла или нажатие от промежуточного угла открытия) в качестве опорной, задается пороговое значение угла открытия акселератора или приращение усилия на педали. Тем не менее скорость транспортного средства в ходе приращения угла открытия педали 2 акселератора может считываться последовательно, и каждый раз, когда считывание скорости транспортного средства выполняется, пороговое значение угла открытия акселератора или приращение усилия на педали может задаваться и обновляться.
[0048] Следует отметить, что приращение усилия на педали выполняется на основе угла открытия акселератора, связанного с расходом топлива, в каждом из вышеописанных вариантов осуществления. Тем не менее пороговое значение может задаваться непосредственно для уровня расхода топлива. Далее, настоящее изобретение в равной степени применимо к случаю, в котором приращение усилия на педали выполняется, когда мгновенный уровень расхода топлива превышает свое пороговое значение.
[0049] В каждом из вышеописанных вариантов осуществления положение самой педали 2 акселератора (величина нажатия) определяется в качестве угла открытия акселератора. Следовательно, хотя величина нажатия педали 2 акселератора имеет практически идентичный смысл с углом открытия акселератора, можно осуществлять управление, согласно настоящему изобретению, с помощью угла открытия, например, дроссельного клапана, который связан с используемой педалью акселератора, в качестве угла открытия акселератора.
[0050] Следует отметить, что устройство управления усилием на педали акселератора согласно настоящему изобретению может применяться не только к транспортному средству с двигателем внутреннего сгорания в качестве единственного источника приведения в движение, но также может применяться, например, к электрическому автомобильному транспортному средству, гибридному транспортному средству и т.п.
Реферат
Изобретение относится к области управления транспортом. Устройство управления усилием на педали акселератора задает пороговое значение угла открытия акселератора в соответствии с углом поворота рулевого колеса так, что пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является большим, относительно превышает пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является небольшим. Достигается снижение расхода топлива. 4 н. и 7 з.п. ф-лы, 8 ил.
Формула
узел определения угла открытия акселератора, выполненный с возможностью определения угла открытия акселератора; и
узел модификации усилия на педали, выполненный с возможностью модифицирования усилия на педали акселератора,
причем когда угол открытия педали акселератора становится больше заданного порогового значения угла открытия акселератора, усилие на педали акселератора увеличивается так, что оно превышает базовое усилие на педали на заданное приращение усилия на педали,
при этом устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с сопротивлением движению транспортного средства так, что приращение усилия на педали, когда сопротивление движению транспортного средства является большим, относительно меньше приращения усилия на педали, когда сопротивление движению транспортного средства является небольшим,
причем устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с углом поворота рулевого колеса транспортного средства так, что приращение усилия на педали, когда угол поворота рулевого колеса является большим, задается относительно меньшим приращения усилия на педали, когда угол поворота рулевого колеса является небольшим, при этом устройство управления усилием на педали акселератора определяет то, работает или нет любой из левого и правого указателей поворота, и запрещает модификацию приращения усилия на педали в соответствии с углом поворота колес, когда каждый из указателей поворота находится в нерабочем режиме.
узел определения угла открытия педали акселератора, выполненный с возможностью определения угла открытия акселератора; и
узел модификации усилия на педали, выполненный с возможностью модифицирования усилия на педали акселератора,
причем когда угол открытия педали акселератора становится больше заданного порогового значения угла открытия акселератора, усилие на педали акселератора увеличивается так, что оно превышает базовое усилие на педали на заданное приращение усилия на педали,
при этом устройство управления усилием на педали акселератора задает пороговое значение угла открытия акселератора в соответствии с углом поворота рулевого колеса так, что пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является большим, относительно превышает пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является небольшим.
узел определения угла открытия акселератора, выполненный с возможностью определения угла открытия акселератора; и
узел модификации усилия на педали, выполненный с возможностью модифицирования усилия на педали акселератора,
причем когда угол открытия педали акселератора становится больше заданного порогового значения угла открытия акселератора, усилие на педали акселератора увеличивается так, что оно превышает базовое усилие на педали на заданное приращение усилия на педали,
при этом устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с сопротивлением движению транспортного средства так, что приращение усилия на педали, когда сопротивление движению транспортного средства является большим, относительно меньше приращения усилия на педали, когда сопротивление движению транспортного средства является небольшим,
причем устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с углом поворота рулевого колеса транспортного средства так, что приращение усилия на педали, когда угол поворота рулевого колеса является большим, задается относительно меньшим приращения усилия на педали, когда угол поворота рулевого колеса является небольшим,
при этом устройство управления усилием на педали акселератора определяет плотность окружающего воздуха и задает приращение усилия на педали, когда плотность воздуха является низкой, относительно небольшим по сравнению с приращением усилия на педали, когда плотность воздуха является высокой.
узел определения угла открытия акселератора, выполненный с возможностью определения угла открытия акселератора; и
узел модификации усилия на педали, выполненный с возможностью модифицирования усилия на педали акселератора,
причем когда угол открытия педали акселератора становится больше заданного порогового значения угла открытия акселератора, усилие на педали акселератора увеличивается так, что оно превышает базовое усилие на педали на заданное приращение усилия на педали,
при этом устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с сопротивлением движению транспортного средства так, что приращение усилия на педали, когда сопротивление движению транспортного средства является большим, относительно меньше приращения усилия на педали, когда сопротивление движению транспортного средства является небольшим,
причем устройство управления усилием на педали акселератора задает приращение усилия на педали в соответствии с углом поворота рулевого колеса транспортного средства так, что приращение усилия на педали, когда угол поворота рулевого колеса является большим, задается относительно меньшим приращения усилия на педали, когда угол поворота рулевого колеса является небольшим,
при этом устройство управления усилием на педали акселератора задает пороговое значение угла открытия акселератора в соответствии с углом поворота рулевого колеса так, что пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является большим, относительно превышает пороговое значение угла открытия акселератора, когда угол поворота рулевого колеса является небольшим.
Комментарии