Способ помощи при движении и устройство помощи при движении - RU2720226C1
Код документа: RU2720226C1
Чертежи








Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при движении и к устройству помощи при движении для прогнозирования действия другого транспортного средства около рассматриваемого транспортного средства.
Уровень техники
[0002] Известно устройство управления транспортного средства, которое управляет транспортным средством в зависимости от соответствующих условий, когда транспортное средство движется при наличии мертвой зоны (см. патентный документ 1). Устройство управления транспортного средства, раскрытое в патентном документе 1, определяет относительный приоритет между намеченным путем, которым следует рассматриваемое транспортное средство, и намеченным путем, которым следует другое транспортное средство, с тем чтобы прогнозировать действие другого транспортного средства в соответствии с определенным приоритетом.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. WO 2016/104198
Сущность изобретения
Техническая задача
[0004] Устройство управления транспортного средства, раскрытое в патентном документе 1, по–прежнему имеет проблему точного прогнозирования действия другого транспортного средства в ситуации, в которой рассматриваемое транспортное средство должно уступать дорогу другому транспортному средству с учетом времени, даже если рассматриваемое транспортное средство имеет более высокий приоритет на дороге относительно другого транспортного средства, либо в ситуации при движении, в которой рассматриваемое транспортное средство должно перемещаться вперед первым с учетом времени, даже если рассматриваемое транспортное средство должно отдавать приоритет другому транспортному средству на дороге.
[0005] Чтобы разрешать традиционные проблемы, описанные выше, настоящее изобретение предоставляет способ помощи при движении и устройство помощи при движении, допускающие повышение точности прогнозирования действия другого транспортного средства.
Техническое решение
[0006] Способ помощи при движении согласно аспекту настоящего изобретения обнаруживает другое транспортное средство и объекты около рассматриваемого транспортного средства, задает область в мертвой зоне относительно другого транспортного средства, указывает объект, присутствующий в области в мертвой зоне, из обнаруженных объектов и прогнозирует действие, которое предпринимает другое транспортное средство, в соответствии с указанным объектом.
Преимущества изобретения
[0007] Аспект настоящего изобретения может повышать точность прогнозирования действия другого транспортного средства.
Краткое описание чертежей
[0008] Фиг. 1 является блок–схемой, показывающей конфигурацию устройства помощи при движении и устройства прогнозирования действий согласно варианту осуществления.
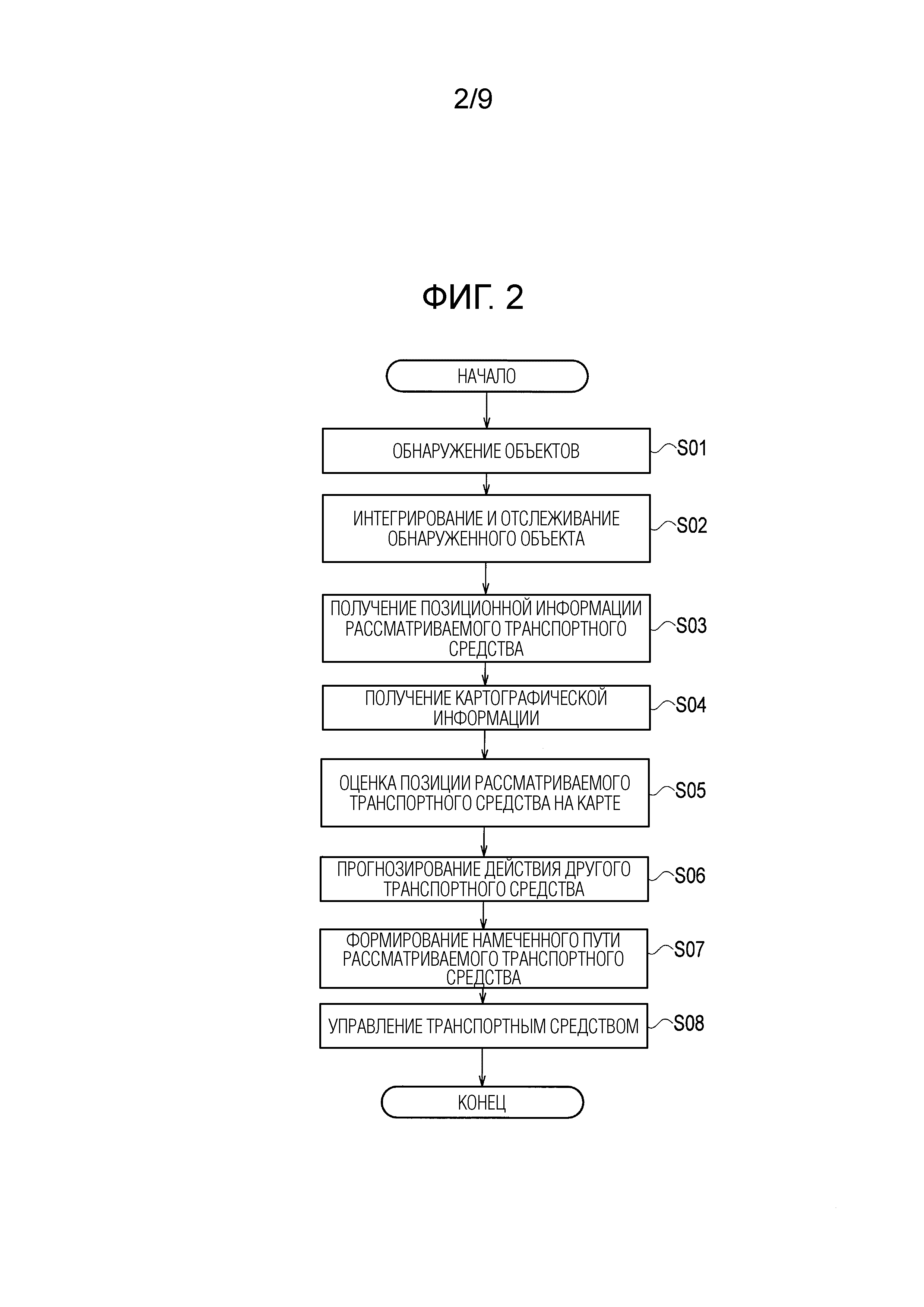
Фиг. 2 является блок–схемой последовательности операций способа, показывающей пример работы устройства помощи при движении и устройства прогнозирования действий, показанных на фиг. 1.
Фиг. 3 является блок–схемой последовательности операций способа, показывающей конкретный процесс на этапе S06, показанном на фиг. 2.
Фиг. 4 является видом сверху, показывающим ситуацию при движении, в которой рассматриваемое транспортное средство 51 движется в своей полосе движения на встречной двухполосной дороге, и другое транспортное средство 52 движется впереди рассматриваемого транспортного средства 51 во встречной полосе движения.
Фиг. 5A является видом сверху ситуации при движении, показанной на фиг. 4, в которой другое транспортное средство 52 отклоняется от встречной полосы движения таким образом, чтобы въезжать в полосу движения рассматриваемого транспортного средства 51.
Фиг. 5B является видом сверху ситуации при движении, показанной на фиг. 4, в которой другое транспортное средство 52 выполняет остановку перед припаркованным транспортным средством 53.
Фиг. 5C является видом сверху ситуации при движении, показанной на фиг. 4, в которой другое транспортное средство 52 сначала отклоняется от встречной полосы движения таким образом, чтобы въезжать в полосу движения рассматриваемого транспортного средства 51, чтобы обгонять припаркованное транспортное средство 53, но затем замедляется и останавливается при распознавании присутствия припаркованного транспортного средства 54b.
Фиг. 6 является видом сверху, иллюстрирующим ситуацию при движении на двухполосной дороге с односторонним движением, в которой рассматриваемое транспортное средство 51 движется в левой полосе движения, и другое транспортное средство 52 движется в правой полосе движения под углом впереди рассматриваемого транспортного средства 51.
Фиг. 7A является видом сверху ситуации при движении, показанной на фиг. 6, в которой другое транспортное средство 52 отклоняется от правой полосы движения таким образом, чтобы въезжать в левую полосу движения.
Фиг. 7B является видом сверху ситуации при движении, показанной на фиг. 6, в которой другое транспортное средство 52 выполняет остановку перед припаркованным транспортным средством 53.
Фиг. 8 является видом сверху, иллюстрирующим ситуацию при движении, в которой рассматриваемое транспортное средство 51 и другое транспортное средство 52 движутся в соответствующих полосах движения на встречной двухполосной дороге к перекрестку.
Фиг. 9A является видом сверху, иллюстрирующим первичный курс 61 (перемещение вперед) и эффективный курс 71 (перемещение вперед) другого транспортного средства 52, движущегося по двухполосной искривленной дороге.
Фиг. 9B является видом сверху, иллюстрирующим первичный курс 62 (смену полосы движения) и эффективный курс 72 (смену полосы движения) другого транспортного средства 52, движущегося по двухполосной искривленной дороге.
Подробное описание вариантов осуществления
[0009] В дальнейшем в этом документе подробно описывается вариант осуществления со ссылкой на чертежи.
[0010] Устройство помощи при движении согласно варианту осуществления, например, является эффективным для использования в ситуации при движении, как показано на фиг. 4. Фиг. 4 иллюстрирует случай, в котором рассматриваемое транспортное средство 51 движется в своей полосе движения на встречной двухполосной дороге, и другое транспортное средство 52 движется впереди рассматриваемого транспортного средства 51 во встречной полосе движения. Множество припаркованных транспортных средств (примеры объектов) (53, 54a и 54b) останавливаются в линию во встречной полосе движения между рассматриваемым транспортным средством 51 и другим транспортным средством 52. Поскольку рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно опережать эти припаркованные транспортные средства, либо рассматриваемое транспортное средство 51, либо другое транспортное средство 52 должно уступать дорогу другому, чтобы позволять ему опережать первым.
[0011] Рассматриваемое транспортное средство 51 имеет приоритет на этой дороге относительно другого транспортного средства 52. Помимо этого, предполагаемое время T1s, которое требуется рассматриваемому транспортному средству 51 для того, чтобы достигать припаркованного транспортного средства 54b, меньше предполагаемого времени T2s, которое требуется другому транспортному средству 52 для того, чтобы достигать припаркованного транспортного средства 53. Рассматриваемое транспортное средство 51 в силу этого определяет то, что рассматриваемое транспортное средство 51 должно предпринимать действие до другого транспортного средства 52 с учетом как приоритета на дороге, так и времени. Как показано на фиг. 5B, рассматриваемое транспортное средство 51 затем прогнозирует действие другого транспортного средства 52, которое должно останавливаться перед припаркованным транспортным средством 53.
[0012] Ситуация, в которой несколько припаркованных транспортных средств (53, 54a и 54b) останавливаются в линию, вызывает область 55 в мертвой зоне относительно другого транспортного средства 52 вследствие присутствия припаркованного транспортного средства 53, и другие припаркованные транспортные средства (54a и 54b) включены в область 55 в мертвой зоне. Поскольку другое транспортное средство 52 неспособно распознавать другие припаркованные транспортные средства (54a и 54b), датчик обнаружения объектов, смонтированный на другом транспортном средстве 52, не может обнаруживать другие припаркованные транспортные средства (54a и 54b), в то время как рассматриваемое транспортное средство 51 имеет сведения по этим припаркованным транспортным средствам (54a и 54b). Другое транспортное средство 52 в таком случае некорректно сравнивает предполагаемое время T1s', которое требуется рассматриваемому транспортному средству 51 для того, чтобы достигать припаркованного транспортного средства 53, с предполагаемым временем T2s. Когда предполагаемое время T1s' превышает предполагаемое время T2s, другое транспортное средство 52 неправильно определяет то, что другое транспортное средство 52 должно перемещаться вперед до рассматриваемого транспортного средства 51, приводя к отклонению от своей полосы движения таким образом, чтобы въезжать в полосу движения, в которой движется рассматриваемое транспортное средство, как показано на фиг. 5A. Эта ситуация может иметь влияние на состояние движения рассматриваемого транспортного средства 51, например, таким образом, что отклоняющееся другое транспортное средство 52 блокирует перемещение вперед рассматриваемого транспортного средства 51 в полосе движения, в которой движется рассматриваемое транспортное средство 51. Это неправильное определение имеет тенденцию вызываться при обстоятельствах, в котором состояние движения, такое как движение ночью или в тумане, либо движение с присутствием помех (таких как дорожные ремонтные работы и знаки), приводит к плохой видимости пассажира или водителя, заставляя другое транспортное средство 52 отклоняться к полосе движения, в которой движется рассматриваемое транспортное средство, как показано на фиг. 5A. Вариант осуществления настоящего изобретения в силу этого может применяться только к случаю, в котором пассажир или водитель имеет плохую видимость в зависимости от состояния движения.
[0013] Как описано выше, рассматриваемое транспортное средство 51 может быть неспособно точно прогнозировать действие другого транспортного средства 52, когда другое транспортное средство 52 не имеет сведения по припаркованным транспортным средствам (54a и 54b), в то время как рассматриваемое транспортное средство 51 распознает эти припаркованные транспортные средства. Рассматриваемое транспортное средство 51 в таком случае должно сразу изменять свое поведение, если рассматриваемое транспортное средство 51 не может прогнозировать действие другого транспортного средства 52, которое должно отклоняться к полосе движения рассматриваемого транспортного средства 51, заставляя пассажира или водителя рассматриваемого транспортного средства 51 испытывать некомфортное ощущение.
[0014] Устройство помощи при движении согласно варианту осуществления в силу этого прогнозирует действие другого транспортного средства 52 с учетом условия в области 55 в мертвой зоне, которая может наблюдаться посредством рассматриваемого транспортного средства 51, но не может распознаваться посредством другого транспортного средства 52. Устройство помощи при движении затем управляет рассматриваемым транспортным средством 51 в соответствии с прогнозированным действием другого транспортного средства 52. Устройство помощи при движении в силу этого может точно прогнозировать действие другого транспортного средства 52 в ситуации при движении, в которой рассматриваемое транспортное средство 51 должно уступать дорогу другому транспортному средству 52 с учетом времени, даже если рассматриваемое транспортное средство 51 имеет более высокий приоритет на дороге относительно другого транспортного средства 52, либо в ситуации при движении, в которой рассматриваемое транспортное средство 51 должно перемещаться вперед первым с учетом времени, даже если рассматриваемое транспортное средство 51 должно отдавать приоритет на дороге другому транспортному средству 52. При использовании в данном документе, выражение "может наблюдаться посредством транспортного средства" охватывает такой принцип, что не только водитель транспортного средства может визуально распознавать ситуацию, но также и датчик обнаружения объектов, смонтированный на транспортном средстве, может обнаруживать ситуацию. Термин "область в мертвой зоне" включает в себя не только мертвую зону относительно пассажира или водителя (водителя или пассажира), но также и область за исключением области обнаружения, обнаруженной посредством датчика обнаружения объектов, смонтированного на транспортном средстве, или область перед помехой с другой стороны от транспортного средства, когда помеха присутствует в передней части транспортного средства в направлении, соединяющем транспортное средство и помеху. Область в мертвой зоне может оцениваться посредством рассматриваемого транспортного средства, когда рассматриваемое транспортное средство наталкивается на другое транспортное средство, или может предварительно вычисляться таким образом, что она используется, когда рассматриваемое транспортное средство наталкивается на другое транспортное средство. Альтернативно, рассматриваемое транспортное средство может внешне получать информацию относительно области в мертвой зоне через связь между транспортными средствами или связь между транспортным средством и дорожной инфраструктурой.
[0015] Ниже описывается конфигурация устройства помощи при движении согласно варианту осуществления со ссылкой на фиг. 1. Устройство помощи при движении включает в себя устройство 1 обнаружения объектов, устройство 3 оценки позиции рассматриваемого транспортного средства, устройство 4 получения данных из карты и микрокомпьютер 100.
[0016] Устройство 1 обнаружения объектов включает в себя различные виды датчиков обнаружения объектов, смонтированных на рассматриваемом транспортном средстве 51, таких как лазерный радар, радар миллиметрового диапазона и камера, для обнаружения объектов около рассматриваемого транспортного средства 51. Устройство 1 обнаружения объектов обнаруживает объекты около рассматриваемого транспортного средства 51 с использованием этих датчиков обнаружения объектов. Устройство 1 обнаружения объектов обнаруживает движущиеся объекты, такие как другие транспортные средства, мотоциклы, велосипеды и пешеходы, и стационарные объекты, такие как припаркованные транспортные средства. Например, устройство 1 обнаружения объектов обнаруживает позицию, ориентацию, размер, скорость, ускорение, замедление и угловую скорость относительно вертикальной оси движущегося объекта или стационарного объекта на основе рассматриваемого транспортного средства. При использовании в данном документе, позиция, ориентация (угол относительно вертикальной оси), размер, скорость, ускорение, замедление и угловая скорость относительно вертикальной оси объекта совместно называются "поведением" объекта. Устройство 1 обнаружения объектов, например, выводит, в качестве результатов обнаружения, поведение двумерного объекта в зенитном виде (также называемом "видом сверху") при просмотре с воздуха над рассматриваемым транспортным средством 51.
[0017] Устройство 3 оценки позиции рассматриваемого транспортного средства включает в себя датчик обнаружения позиции, к примеру, по стандарту глобальной системы позиционирования (GPS), или средство одометрии, для измерения абсолютной позиции рассматриваемого транспортного средства 51. Устройство 3 оценки позиции рассматриваемого транспортного средства измеряет абсолютную позицию рассматриваемого транспортного средства 51, которая представляет собой позицию, ориентацию и скорость рассматриваемого транспортного средства 51 на основе предварительно определенной опорной точки, посредством использования датчика обнаружения позиции.
[0018] Устройство 4 получения данных из карты получает картографическую информацию, указывающую структуру дороги, по которой движется рассматриваемое транспортное средство 51. Устройство 4 получения картографической информации может хранить картографическую базу данных, сохраняющую картографическую информацию, или может получать картографическую информацию из внешнего сервера картографических данных через облачные вычисления. Картографическая информация, полученная посредством устройства 4 получения данных из карты, включает в себя различные фрагменты информации относительно структуры дороги, такие как абсолютные позиции полос движения и соединительная взаимосвязь и относительная позиционная взаимосвязь полос движения.
[0019] Микрокомпьютер 100 (пример контроллера) прогнозирует действие другого транспортного средства в соответствии с результатами обнаружения, полученными посредством устройства 1 обнаружения объектов и устройства 3 оценки позиции рассматриваемого транспортного средства, и информацией, полученной посредством устройства 4 получения данных из карты, формирует намеченный путь рассматриваемого транспортного средства 51 в зависимости от действия другого транспортного средства и управляет рассматриваемым транспортным средством 51 в соответствии со сформированным намеченным путем.
[0020] Вариант осуществления примерно иллюстрирует микрокомпьютер 100 в качестве устройства помощи при движении для управления рассматриваемым транспортным средством 51, но не ограничен этим случаем. Например, микрокомпьютер 100 может быть применимым к случаю функционирования в качестве устройства прогнозирования действий для прогнозирования действия другого транспортного средства. Микрокомпьютер 100 в силу этого может в итоге выводить прогнозированное действие другого транспортного средства без формирования намеченных путей или управления движением по намеченному пути, сформированному для рассматриваемого транспортного средства 51.
[0021] Микрокомпьютер 100 представляет собой микрокомпьютер общего назначения, включающий в себя центральный процессор (CPU), запоминающее устройство и модуль ввода–вывода. Компьютерная программа (программа помощи при движении) устанавливается на микрокомпьютере 100 таким образом, что он функционирует в качестве устройства помощи при движении. Микрокомпьютер 100 функционирует в качестве множества схем (2a, 2b, 5, 10, 21 и 22) обработки информации, включенных в устройство помощи при движении, когда компьютерная программа выполняется. Хотя вариант осуществления проиллюстрирован со случаем, в котором программное обеспечение устанавливается, чтобы изготавливать схемы (2a, 2b, 5, 10, 21 и 22) обработки информации, включенные в устройство помощи при движении, специализированные аппаратные средства для выполнения каждой обработки информации, как описано ниже, могут подготавливаться, чтобы составлять схемы (2a, 2b, 5, 10, 21 и 22) обработки информации. Соответствующие схемы (2a, 2b, 5, 10, 21 и 22) обработки информации могут состоять из отдельных аппаратных средств. Схемы (2a, 2b, 5, 10, 21 и 22) обработки информации также могут служить в качестве электронного модуля управления (ECU), используемого для другой обработки управления относительно транспортного средства.
[0022] Микрокомпьютер 100 включает в себя, в качестве соответствующих схем (2a, 2b, 5, 10, 21 и 22) обработки информации, модуль 2a интегрирования результатов обнаружения, модуль 2b отслеживания объектов, модуль 5 вычисления позиции на карте, модуль 10 прогнозирования действий, модуль 21 формирования намеченных путей рассматриваемого транспортного средства и модуль 22 управления транспортного средства. Модуль 10 прогнозирования действий включает в себя модуль 11 определения поведения, модуль 12 прогнозирования вероятности выполнения действий, первый модуль 13 коррекции вероятности выполнения действий, второй модуль 15 коррекции вероятности выполнения действий, модуль 16 прогнозирования курса, модуль 17 оценки отношения правдоподобия, модуль 18 обнаружения областей в мертвой зоне, модуль 19 извлечения перегороженных объектов и модуль 14 прогнозирования курса перегороженных объектов. Когда микрокомпьютер 100 используется в качестве устройства прогнозирования действий для прогнозирования действия другого транспортного средства, необязательно включены схемы обработки информации в качестве модуля 21 формирования намеченных путей рассматриваемого транспортного средства и модуля 22 управления транспортного средства.
[0023] Модуль 2a интегрирования результатов обнаружения интегрирует несколько результатов обнаружения, полученных посредством соответствующих датчиков обнаружения объектов, включенных в модуль обнаружения объектов 1, чтобы выводить один результат обнаружения в расчете на объект. В частности, модуль 2a интегрирования результатов обнаружения вычисляет поведение объекта, которое является наиболее обоснованным и имеет наименьшую ошибку из числа фрагментов поведения объекта, обнаруженных посредством соответствующих датчиков обнаружения объектов, с учетом характеристик ошибки соответствующих датчиков обнаружения объектов. Модуль 2a интегрирования результатов обнаружения совместно оценивает результаты обнаружения, полученные посредством различных датчиков таким образом, чтобы получать более точный результат обнаружения для каждого объекта посредством традиционного способа слияния данных датчиков.
[0024] Модуль 2b отслеживания объектов отслеживает каждый объект, обнаруженный посредством устройства 1 обнаружения объектов. В частности, модуль 2b отслеживания объектов определяет сходство объекта (отображение), обнаруженного с интервалами в соответствии с поведением объекта, выводимым в различные моменты времени, посредством использования результата обнаружения, интегрированного посредством модуля 2a интегрирования результатов обнаружения, и прогнозирует поведение объекта в соответствии с результатом преобразования. Каждый фрагмент поведения объекта, выводимого в различные моменты времени, сохраняется в запоминающем устройстве в микрокомпьютере 100 и используется для прогнозирования курса, описанного ниже.
[0025] Модуль 5 вычисления позиции на карте оценивает позицию и ориентацию рассматриваемого транспортного средства 51 на карте согласно абсолютной позиции рассматриваемого транспортного средства 51, полученной посредством устройства 3 оценки позиции рассматриваемого транспортного средства, и картографическим данным, полученным посредством устройства 4 получения данных из карты. Например, модуль 5 вычисления позиции на карте указывает как дорогу, по которой движется рассматриваемое транспортное средство 51, так и полосу движения рассматриваемого транспортного средства 51 на дороге.
[0026] Модуль 10 прогнозирования действий прогнозирует действие движущегося объекта около рассматриваемого транспортного средства 51 в соответствии с результатом обнаружения, полученным посредством модуля 2a интегрирования результатов обнаружения, и позицией рассматриваемого транспортного средства 51, указываемой посредством модуля 5 вычисления позиции на карте. Ниже подробно описывается конкретная конфигурация модуля 10 прогнозирования действий.
[0027] Модуль 11 определения поведения указывает позицию и поведение объекта на карте в соответствии с позицией рассматриваемого транспортного средства 51 на карте и поведением объекта, полученным посредством модуля 2a интегрирования результатов обнаружения. Модуль 11 определения поведения определяет то, что объект представляет собой движущийся объект, когда позиция объекта на карте изменяется с прохождением времени, и определяет атрибут движущегося объекта (например, транспортного средства или пешехода) в соответствии с размером и скоростью движущегося объекта. Когда движущийся объект определяется в качестве другого движущегося транспортного средства, модуль 11 определения поведения указывает дорогу, по которой движется другое транспортное средство, и его полосу движения.
[0028] Когда позиция объекта на карте не изменяется с прохождением времени, модуль 11 определения поведения определяет то, что объект представляет собой стационарный объект, и определяет атрибут стационарного объекта (например, припаркованного транспортного средства или пешехода) в соответствии с позицией на карте, ориентацией и размером стационарного объекта.
[0029] Модуль 12 прогнозирования вероятности выполнения действий прогнозирует вероятность действия другого транспортного средства на основе карты. Модуль 12 прогнозирования вероятности выполнения действий прогнозирует намерение действия, которое другое транспортное средство должно предпринимать после этого, на основе структуры дороги, включенной в картографическую информацию, и информации полосы движения, которой принадлежит другое транспортное средство, и вычисляет первичный курс другого транспортного средства в соответствии с прогнозированным намерением действия на основе структуры дороги. При использовании в данном документе, термин "вероятность действия" означает видовое понятие, включающее в себя намерение действия и первичный курс. Термин "первичный курс" охватывает профили позиций другого транспортного средства в различные моменты времени, а также профили скоростей другого транспортного средства в соответствующих позициях.
[0030] Например, когда другое транспортное средство движется по одной искривленной дороге с одной полосой движения, модуль 12 прогнозирования вероятности выполнения действий прогнозирует намерение действия следования в полосе движения (перемещения вперед) и вычисляет курс вдоль полосы движения на карте в качестве первичного курса. Когда другое транспортное средство движется по одной искривленной дороге с множеством полос движения, модуль 12 прогнозирования вероятности выполнения действий прогнозирует намерение действия перемещения вперед и намерение действия смены полосы движения вправо или влево (смены полосы движения). Первичный курс другого транспортного средства с намерением действия при смене полосы движения представляет собой курс смены полосы движения на основе структуры дороги и предварительно определенного периода для времени смены полосы движения. Когда другое транспортное средство движется к перекрестку, модуль 12 прогнозирования вероятности выполнения действий прогнозирует намерение действия, включающего в себя перемещение вперед, правый поворот и левый поворот, и вычисляет курс с перемещением вперед, курс для правого поворота и курс для левого поворота в качестве первичного курса на основе структуры дороги на перекрестке на карте. Вычисление "первичного курса" учитывает структуру дороги, но не учитывает поведение другого транспортного средства, интегрированное посредством модуля 2a интегрирования результатов обнаружения.
[0031] Первый модуль 13 коррекции вероятности выполнения действий учитывает стационарный объект, обнаруженный посредством устройства 1 обнаружения объектов, чтобы корректировать вероятность действия, прогнозированную посредством модуля 12 прогнозирования вероятности выполнения действий. В частности, первый модуль 13 коррекции вероятности выполнения действий определяет то, перекрываются или нет первичный курс другого транспортного средства и позиция стационарного объекта между собой. Когда первичный курс и позиция перекрываются между собой, первый модуль 13 коррекции вероятности выполнения действий дополнительно добавляет намерение действия и первичный курс параллельно движущегося транспортного средства 52 для объезда стационарного объекта.
[0032] В частности, в ситуации при движении, показанной на фиг. 4, модуль 12 прогнозирования вероятности выполнения действий прогнозирует намерение действия, которое должно предпринимать другое транспортное средство 52, чтобы следовать в полосе движения (перемещение вперед) таким образом, чтобы вычислять первичный курс (перемещение вперед). Первый модуль 13 коррекции вероятности выполнения действий затем определяет то, что первичный курс (перемещение вперед) другого транспортного средства 52 перекрывается с позициями припаркованных транспортных средств (53, 54a и 54b) в качестве стационарных объектов. Модуль 12 прогнозирования вероятности выполнения действий дополнительно добавляет вероятность действия (первичный курс 63), которое должно предпринимать другое транспортное средство 52, чтобы отклоняться таким образом, чтобы въезжать в полосу движения, в которой движется рассматриваемое транспортное средство 51, как показано на фиг. 5A, и вероятность действия (первичный курс 64), которое должно предпринимать другое транспортное средство 52, чтобы выполнять остановку перед припаркованным транспортным средством 53, как показано на фиг. 5B.
[0033] Когда другой движущийся объект (не показан) обнаруживается посредством устройства 1 обнаружения объектов одновременно с другим транспортным средством 52, проиллюстрированным на фиг. 4, первый модуль 13 коррекции вероятности выполнения действий учитывает другой движущийся объект, чтобы корректировать вероятность действия, прогнозированную посредством модуля 12 прогнозирования вероятности выполнения действий. В частности, первый модуль 13 коррекции вероятности выполнения действий хронологически определяет то, перекрываются или нет другой движущийся объект и параллельно движущееся транспортное средство 52 между собой. Когда два движущихся объекта перекрываются между собой, первый модуль 13 коррекции вероятности выполнения действий дополнительно добавляет намерение действия и первичный курс другого транспортного средства 52 для объезда другого движущегося объекта.
[0034] Модуль 18 обнаружения областей в мертвой зоне обнаруживает область в мертвой зоне относительно другого транспортного средства 52, вызываемую посредством объектов, обнаруженных посредством устройства 1 обнаружения объектов. Объекты, обнаруженные посредством устройства 1 обнаружения объектов, могут вызывать область в мертвой зоне относительно другого транспортного средства 52 около рассматриваемого транспортного средства 51. Модуль 18 обнаружения областей в мертвой зоне указывает область в мертвой зоне относительно другого транспортного средства 52 на карте. В частности, модуль 18 обнаружения областей в мертвой зоне указывает область 55 в мертвой зоне относительно другого транспортного средства 52 на основе позиций объектов (52, 53, 54a и 54b), выводимых из устройства 1 обнаружения объектов, как показано в виде сверху по фиг. 4. Модуль 18 обнаружения областей в мертвой зоне обнаруживает область 55 в мертвой зоне относительно другого транспортного средства 52, вызываемую посредством припаркованного транспортного средства 53.
[0035] Модуль 18 обнаружения областей в мертвой зоне может сначала задавать область, которая может обнаруживаться посредством рассматриваемого транспортного средства 51, в виде сверху, показанном на фиг. 4, а затем указывать слепую область 55 остановки, которая не может обнаруживаться посредством другого транспортного средства 52 в указанной области. Модуль 18 обнаружения областей в мертвой зоне в силу этого может указывать область 55 в мертвой зоне, которая может наблюдаться посредством рассматриваемого транспортного средства 51, но не может распознаваться посредством другого транспортного средства 52. Как описано выше, определение того, следует или нет наблюдать область 55 в мертвой зоне, может выполняться либо водителем транспортного средства, либо посредством датчиков обнаружения объектов, смонтированных на транспортном средстве.
[0036] Область 55 в мертвой зоне не ограничена двумерной областью в виде сверху и может указываться в качестве трехмерной области, имеющей компонент высоты (компонент по оси Z) с учетом высоты объекта. Например, конфигурация области 55 в мертвой зоне в направлении высоты, вызываемой посредством припаркованного транспортного средства 53, может определяться в зависимости от высоты припаркованного транспортного средства 53, показанного на фиг. 4.
[0037] Модуль 18 обнаружения областей в мертвой зоне не обязательно вычисляет область 55 в мертвой зоне относительно другого транспортного средства 52 во всех направлениях другого транспортного средства 52. Модуль 18 обнаружения областей в мертвой зоне должен вычислять только область в мертвой зоне в участке, имеющем вероятность того, что другое транспортное средство 52 должно перемещаться в него, в соответствии с направлением движения и позицией другого транспортного средства 52 и картографической информацией. Модуль 18 обнаружения областей в мертвой зоне в силу этого может указывать область 55 в мертвой зоне относительно другого транспортного средства 52 только в участке с вероятностью того, что другое транспортное средство 52 должно перемещаться в него, в соответствии с позицией другого транспортного средства 52, направлением движения другого транспортного средства 52 и структурой дороги около другого транспортного средства 52. Это позволяет уменьшать вычислительную нагрузку микрокомпьютера 100 без уменьшения точности прогнозирования действия другого транспортного средства 52, эффективно вычисляя область 55 в мертвой зоне, соответственно.
[0038] Пороговое значение времени может задаваться для указания области 55 в мертвой зоне. В частности, когда состояние, в котором другое транспортное средство 52 не может наблюдать конкретную область, продолжается в течение опорного времени (500 миллисекунд) или более, область 55 в мертвой зоне относительно другого транспортного средства 52 может определяться как вызываемая. Это может исключать, из области 55 в мертвой зоне, область, которая исчезает из вида другого транспортного средства 52 в течение короткого периода времени, что не имеет влияния на прогнозирование действия другого транспортного средства 52. Это позволяет уменьшать вычислительную нагрузку микрокомпьютера 100, чтобы повышать скорость вычисления. Опорное время не ограничено фиксированным значением и может варьироваться в зависимости от места и условий на карте.
[0039] Модуль 19 извлечения перегороженных объектов извлекает объект (перегороженный объект), присутствующий в области 55 в мертвой зоне, из объектов, обнаруженных посредством модуля 2a интегрирования результатов обнаружения. Другими словами, модуль 19 извлечения перегороженных объектов извлекает объект в области 55 в мертвой зоне, обнаруженной посредством рассматриваемого транспортного средства 51. Модуль 19 извлечения перегороженных объектов в силу этого может указывать объект, который может наблюдаться посредством рассматриваемого транспортного средства 51, но не может распознаваться посредством другого транспортного средства 52 (в дальнейшем называемого "перегороженным объектом"). Модуль 19 извлечения перегороженных объектов должен только извлекать перегороженный объект и не обязательно указывать дополнительную информацию, такую как атрибут перегороженного объекта (к примеру, пешехода или транспортного средства). Перегороженный объект может обнаруживаться посредством датчика, включенного в рассматриваемое транспортное средство 51, или может обнаруживаться посредством другого устройства обнаружения, не включенного в рассматриваемое транспортное средство 51 таким образом, что рассматриваемое транспортное средство 51 внешне получает информацию, обнаруженную посредством устройства обнаружения.
[0040] Модуль 2a интегрирования результатов обнаружения обнаруживает припаркованные транспортные средства (54a и 54b) в ситуации при движении, показанной на фиг. 4. Модуль 19 извлечения перегороженных объектов в силу этого может извлекать припаркованные транспортные средства (54a и 54b), присутствующие в области 55 в мертвой зоне, в качестве перегороженных объектов.
[0041] Модуль 19 извлечения перегороженных объектов может учитывать высоты области 55 в мертвой зоне и объекта (перегороженного объекта), чтобы определять присутствие объекта в области 55 в мертвой зоне. Например, когда высота припаркованного транспортного средства 53 ниже высоты припаркованного транспортного средства 54a в ситуации при движении, показанной на фиг. 4, высота области 55 в мертвой зоне также ниже высоты припаркованного транспортного средства 54a. В этом случае, модуль 19 извлечения перегороженных объектов не определяет то, что припаркованное транспортное средство 54a включено в область 55 в мертвой зоне, поскольку другое транспортное средство 52 может обнаруживать часть припаркованного транспортного средства 54a. Модуль 19 извлечения перегороженных объектов в силу этого может определять то, включен или нет весь объект в область 55 в мертвой зоне, с учетом компонента высоты области 55 в мертвой зоне.
[0042] Модуль 14 прогнозирования курса перегороженных объектов прогнозирует курс объекта в соответствии с поведением объекта, присутствующего в области 55 в мертвой зоне, указываемым посредством модуля 11 определения поведения. Когда перегороженный объект представляет собой движущийся объект, модуль 14 прогнозирования курса перегороженных объектов может прогнозировать действие другого транспортного средства 52 на основе поведения объекта. Модуль 14 прогнозирования курса перегороженных объектов сначала прогнозирует курс перегороженного объекта на основе поведения перегороженного объекта. Например, когда припаркованное транспортное средство 54b включает указатель поворота, указывающий правый поворот в ситуации при движении, показанной на фиг. 4, модуль 14 прогнозирования курса перегороженных объектов прогнозирует действие трогания с места припаркованного транспортного средства 54b и курс после действия трогания с места в соответствии с поведением припаркованного транспортного средства 54b. Модуль 14 прогнозирования курса перегороженных объектов может прогнозировать направление движения объекта на основе его скорости.
[0043] Второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия соответствующих вероятностей действия, прогнозированных посредством модуля 12 прогнозирования вероятности выполнения действий и первого модуля 13 коррекции вероятности выполнения действий, в соответствии с оцененным временем достижения каждого из рассматриваемого транспортного средства 51 и другого транспортного средства 52. Второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия соответствующих вероятностей действия с учетом условия в области 55 в мертвой зоне, которая может обнаруживаться посредством рассматриваемого транспортного средства 51, но не может обнаруживаться посредством другого транспортного средства 52. Например, когда объект присутствует в области 55 в мертвой зоне, второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия вероятностей действия, которое должно предпринимать другое транспортное средство 52, в соответствии с объектом, присутствующим в области 55 в мертвой зоне. В частности, второй модуль 15 коррекции вероятности выполнения действий сначала определяет то, имеются или нет объекты в области 55 в мертвой зоне. Когда определяется то, что объект присутствует в области 55 в мертвой зоне, второй модуль 15 коррекции вероятности выполнения действий может оценивать то, что другое транспортное средство 52 должно предпринимать действие без распознавания присутствия объекта в области 55 в мертвой зоне, поскольку другое транспортное средство 52 не может наблюдать состояние в области 55 в мертвой зоне. Второй модуль 15 коррекции вероятности выполнения действий прогнозирует, на основе этой оценки, намерение действия, которое должно предпринимать другое транспортное средство 52, когда другое транспортное средство 52 не распознает объект, присутствующий в области 55 в мертвой зоне, с тем чтобы оценивать отношение правдоподобия соответствующих вероятностей прогнозируемого действия.
[0044] Например, второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия в качестве того, какое одно из рассматриваемого транспортного средства 51 и другого транспортного средства 52 должно опережать припаркованные транспортные средства (53, 54a и 54b) первым, в ситуации при движении, показанной на фиг. 4.
[0045] Если условие в области 55 в мертвой зоне не учитывается, предполагаемое время T1s, которое требуется рассматриваемому транспортному средству 51 для того, чтобы достигать припаркованного транспортного средства 54b, меньше предполагаемого времени T2s, которое требуется другому транспортному средству 52 для того, чтобы достигать припаркованного транспортного средства 53. Второй модуль 15 коррекции вероятности выполнения действий затем должен определять то, что рассматриваемое транспортное средство 51 может опережать припаркованные транспортные средства до другого транспортного средства 52, и неточно оценивает отношение правдоподобия таким образом, что вероятность действия, которое должно предпринимать другое транспортное средство 52, чтобы выполнять остановку перед припаркованным транспортным средством 53 (фиг. 5B), является высокой, и также оценивает отношение правдоподобия таким образом, что вероятность действия, которое должно предпринимать другое транспортное средство 52, чтобы обгонять припаркованные транспортные средства, до действия рассматриваемого транспортного средства 51, является низкой.
[0046] Когда условие в области 55 в мертвой зоне учитывается, другое транспортное средство 52 предположительно должно предпринимать действие без распознавания присутствия припаркованных транспортных средств (54a и 54b). В частности, другое транспортное средство 52 предположительно должно неправильно определять то, что другое транспортное средство 52 должно опережать объекты до рассматриваемого транспортного средства 51, поскольку предполагаемое время T1s', которое требуется рассматриваемому транспортному средству 51 для того, чтобы достигать припаркованного транспортного средства 53, превышает предполагаемое время T2s. Второй модуль 15 коррекции вероятности выполнения действий в силу этого прогнозирует отношение правдоподобия таким образом, что вероятность действия, которое должно предпринимать другое транспортное средство 52, чтобы отклоняться таким образом, чтобы въезжать в полосу движения, в которой движется рассматриваемое транспортное средство, как показано на фиг. 5A, является высокой. А именно, второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия, в котором вероятность действия, показанного на фиг. 5A, выше вероятности действия, показанного на фиг. 5B.
[0047] Второй модуль 15 коррекции вероятности выполнения действий в силу этого оценивает отношение правдоподобия вероятностей действия, которое должно предпринимать другое транспортное средство 52, с учетом не только оцененного времени достижения каждого из рассматриваемого транспортного средства 51 и другого транспортного средства 52, но также и условия в области 55 в мертвой зоне. Если определение отношения правдоподобия основано только на объектах, обнаруженных посредством рассматриваемого транспортного средства 51, другое транспортное средство 52 предположительно должно предпринимать действие разрешения рассматриваемому транспортному средству 51 перемещаться вперед, что приводит к тому, что рассматриваемое транспортное средство 51 опережает припаркованные транспортные средства (53, 54a и 54b) до другого транспортного средства 52. Тем не менее, другое транспортное средство 52 может определять необходимость предпринимать действие только на основе объекта, обнаруженного посредством другого транспортного средства 52. В таком случае, другое транспортное средство 52 определяет то, что рассматриваемое транспортное средство 51 должно уступать дорогу другому транспортному средству 52 таким образом, чтобы позволять другому транспортному средству 52 опережать припаркованные транспортные средства (53, 54a и 54b) до рассматриваемого транспортного средства 51. Если другое транспортное средство 52 опережает припаркованные транспортные средства (53, 54a и 54b) до рассматриваемого транспортного средства 51, рассматриваемое транспортное средство 51 должно внезапно изменять свое поведение таким образом, чтобы предпринимать действие предотвращения столкновения с другим транспортным средством 52. Второй модуль 15 коррекции вероятности выполнения действий в силу этого оценивает отношение правдоподобия вероятностей действия в соответствии с объектом, который может обнаруживаться посредством другого транспортного средства 52, когда имеются объекты в области 55 в мертвой зоне относительно другого транспортного средства 52.
[0048] Когда курс объекта, присутствующего в области 55 в мертвой зоне, прогнозируется посредством модуля 14 прогнозирования курса перегороженных объектов, первый модуль 13 коррекции вероятности выполнения действий добавляет вероятность действия, которое должно предпринимать другое транспортное средство 52, в соответствии с курсом перегороженного объекта. Второй модуль 15 коррекции вероятности выполнения действий в силу этого может прогнозировать отношение правдоподобия вероятностей действия, которое должно предпринимать другое транспортное средство 52 в соответствии с курсом перегороженного объекта. Например, когда прогнозируется то, что припаркованное транспортное средство 54b должно предпринимать действие трогания с места в ситуации при движении, показанной на фиг. 4, другое транспортное средство 52 может обнаруживать припаркованное транспортное средство 54b, которое выезжает из области 55 в мертвой зоне, как только оно начинает перемещение. В этом случае, первый модуль 13 коррекции вероятности выполнения действий добавляет вероятность действия (намерение действия и первичный курс 63') другого транспортного средства 52, которое сначала должно отклоняться таким образом, чтобы въезжать в полосу движения, в которой движется рассматриваемое транспортное средство 51, чтобы обгонять припаркованное транспортное средство 53, но затем внезапно замедляться, чтобы выполнять остановку, поскольку другое транспортное средство 52 распознает присутствие припаркованного транспортного средства 54b, как показано на фиг. 5C. Второй модуль 15 коррекции вероятности выполнения действий затем задает отношение правдоподобия таким образом, что добавленная вероятность действия выше вероятностей действия (63 и 64), показанных на фиг. 5A и фиг. 5B.
[0049] Дополнительно, в ситуации при движении, показанной на фиг. 4, первый модуль 13 коррекции вероятности выполнения действий может добавлять вероятность действия (намерение действия и первичный курс 63') другого транспортного средства 52, показанного на фиг. 5C, также тогда, когда припаркованные транспортные средства (53, 54a и 54b) представляют собой стационарные объекты. Причина этого заключается в том, что другое транспортное средство 52 может обнаруживать припаркованное транспортное средство 54b при отклонении к полосе движения, в которой движется рассматриваемое транспортное средство 51, для обгона припаркованного транспортного средства 53.
[0050] Модуль 16 прогнозирования курса прогнозирует курс (эффективный курс), которым следует другое транспортное средство 52, в соответствии с поведением, обнаруженным посредством модуля 11 определения поведения. В частности, модуль 16 прогнозирования курса вычисляет эффективный курс, когда другое транспортное средство 52 предположительно предпринимает действие на основе намерения прогнозированного действия, посредством традиционного способа оценки состояния, такого как фильтрация Калмана. При использовании в данном документе, термин "эффективный курс" охватывает профили позиций другого транспортного средства 52 в различные моменты времени, а также профили скоростей другого транспортного средства 52 в соответствующих позициях, как и в случае первичного курса. Эффективный курс и первичный курс являются общими в том, что другое транспортное средство 52 должно следовать им, но отличаются друг от друга в том, что эффективный курс вычисляется с учетом поведения другого транспортного средства 52, тогда как первичный курс вычисляется без учета поведения другого транспортного средства 52.
[0051] Фиг. 9A и фиг. 9B иллюстрируют первичные курсы (61 и 62) другого транспортного средства 52, вычисленные согласно намерению действия и структуре дороги без поведения учтенного другого транспортного средства 52. Поскольку текущая ориентация (угол относительно вертикальной оси) другого транспортного средства 52, например, не учитывается, соответствующие первичные курсы (61 и 62) идут в различных направлениях из текущей позиции другого транспортного средства 52. Модуль 16 прогнозирования курса затем учитывает поведение другого транспортного средства 52, чтобы вычислять курс (эффективный курс), соответствующий намерению действия, описанного выше. А именно, модуль 16 прогнозирования курса вычисляет эффективный курс, когда другое транспортное средство 52 предположительно предпринимает действие, соответствующее намерению действия, описанного выше.
[0052] Фиг. 5A, фиг. 5B, фиг. 5C, фиг. 7A и фиг. 7B также иллюстрируют первичные курсы (63, 63', 64, 65 и 66) другого транспортного средства 52, вычисляемые согласно намерению действия другого транспортного средства 52 и структуре дороги.
[0053] Ориентация (угол относительно вертикальной оси) другого транспортного средства 52, проиллюстрированного на фиг. 9A и фиг. 9B, наклоняется налево относительно первичного курса 61 другого транспортного средства 52, следующего в полосе движения. Скорость другого транспортного средства 52 имеет только компонент скорости в направлении движения, и компонент скорости в направлении ширины транспортного средства равен нулю. Другое транспортное средство 52 в силу этого находится в состоянии выполнения перемещения вперед. Когда другое транспортное средство 52 движется в соответствии с намерением действия следования в полосе движения на основе вышеуказанной ориентации и скорости, другое транспортное средство 52 движется по эффективному курсу 71, который начинает отход от первичного курса 61 к левой стороне, а затем возвращается, так что в итоге он соответствует первичному курсу 61, как показано на фиг. 9A. Другими словами, другое транспортное средство 52 предположительно должно следовать скорректированным курсом (перерегулируемым курсом), сформированным таким образом, что отклонение от полосы движения корректируется. Модуль 16 прогнозирования курса за счет этого прогнозирует эффективный курс 71, соответствующий намерению действия следования в полосе движения (перемещения вперед), на основе ориентации (угла относительно вертикальной оси) и скорости другого транспортного средства 52.
[0054] Когда другое транспортное средство 52 движется в соответствии с намерением действия смены полосы движения на основе идентичной ориентации и скорости, другое транспортное средство 52 движется по эффективному курсу 72, который начинает поворот в направлении влево, чтобы переходить в левую полосу движения, и затем выполняет небольшой поворот направо, с тем чтобы корректировать направление таким образом, чтобы следовать в левой полосе движения, как проиллюстрировано на фиг. 9B. А именно, сформированный эффективный курс 72 включает в себя клотоидную кривую левого поворота и клотоидную кривую правого поворота, начинающуюся с состояния, в котором угол поворота при рулении находится в позиции нейтрали. Эффективный курс 72 в силу этого используется для смены полосы движения, которая требует времени, практически идентичного "предварительно определенному периоду времени смены полосы движения", используемому для вычисления курса 62 со сменой полосы движения. Кривые, используемые, когда эффективный курс формируется, не обязательно представляют собой клотоидные кривые и могут представлять собой любые другие кривые. Как показано на фиг. 9B, эффективный курс 72 имеет конфигурацию, практически идентичную конфигурации первичного курса 62 для смены полосы движения.
[0055] Модуль 16 прогнозирования курса вычисляет курс, соответствующий намерению действия (эффективный курс), с учетом поведения другого транспортного средства 52 относительно соответствующих первичных курсов (63, 63', 64, 65 и 66), показанных на фиг. 5A, фиг. 5B, фиг. 5C, фиг. 7A и фиг. 7B, идентично фиг. 9A и фиг. 9B. Например, модуль 16 прогнозирования курса вычисляет эффективный курс для другого транспортного средства 52, соответствующего намерению действия отклонения от своей полосы движения или выполнения остановки на основе ориентации (угла относительно вертикальной оси) и скорости другого транспортного средства 52.
[0056] Хотя этот случай учитывает ориентацию и скорость в качестве поведения другого транспортного средства 52, вместо этого могут вычисляться позиция, ускорение и замедление другого транспортного средства 52. Например, замедление при смене полосы движения предположительно может быть больше, чем в случае перемещения вперед.
[0057] Модуль 17 оценки отношения правдоподобия сравнивает каждую вероятность действия, прогнозированную посредством модуля 12 прогнозирования вероятности выполнения действий и первого модуля 13 коррекции вероятности выполнения действий, с поведением другого транспортного средства 52, интегрированным посредством модуля 2a интегрирования результатов обнаружения, с тем чтобы прогнозировать действие другого транспортного средства 52. Модуль 17 оценки отношения правдоподобия дополнительно прогнозирует действие другого транспортного средства 52 с учетом отношения правдоподобия, прогнозированного посредством второго модуля 15 коррекции вероятности выполнения действий.
[0058] В частности, модуль 17 оценки отношения правдоподобия сравнивает первичный курс с эффективным курсом для каждой из вероятностей действия, прогнозированных посредством модуля 12 прогнозирования вероятности выполнения действий и первого модуля 13 коррекции вероятности выполнения действий. Модуль 17 оценки отношения правдоподобия затем вычисляет отношение правдоподобия соответствующих вероятностей действия на основе разности между первичным курсом и эффективным курсом. Вычисленное отношение правдоподобия является более высоким по мере того, как разность между первичным курсом и эффективным курсом меньше.
[0059] Модуль 17 оценки отношения правдоподобия дополнительно взвешивает отношение правдоподобия соответствующих вероятностей действия согласно отношению правдоподобия, прогнозированному посредством второго модуля 15 коррекции вероятности выполнения действий. Например, модуль 17 оценки отношения правдоподобия умножает отношение правдоподобия соответствующих вероятностей действия на отношение правдоподобия, прогнозированное посредством второго модуля 15 коррекции вероятности выполнения действий, используемое в качестве коэффициента. Это вычисление может интегрировать отношение правдоподобия, прогнозированное посредством второго модуля 15 коррекции вероятности выполнения действий, с отношением правдоподобия, оцененным посредством модуля 17 оценки отношения правдоподобия. Например, модуль 17 оценки отношения правдоподобия умножает отношение правдоподобия вероятности действия 63 отклонения от полосы движения, как показано на фиг. 5A, на больший коэффициент, чем отношение правдоподобия вероятности действия 64 выполнения остановки, как показано на фиг. 5B.
[0060] Вероятность действия с наибольшим отношением правдоподобия может определяться как наиболее обоснованная, когда учитываются поведение другого транспортного средства 52 и условия в области 55 в мертвой зоне. Модуль 17 оценки отношения правдоподобия затем определяет то, что вероятность действия, оцененного как имеющее наибольшее отношение правдоподобия, представляет собой действие, которое предпринимает другое транспортное средство 52. Разность между первичным курсом и эффективным курсом, например, вычисляется согласно сумме разностей между позициями соответствующих курсов или профилями скоростей. Фиг. 9A и 9B иллюстрируют области S1 и S2, каждая из которых представляет собой сумму, полученную посредством интегрирования позиционных разностей между первичным курсом и эффективным курсом. Позиционная разность может определяться как меньшая по мере того, как область меньше, так что получается более высокое отношение правдоподобия. В качестве другого примера, когда позиционные разности являются небольшими, но профили скоростей значительно отличаются, получается меньшее отношение правдоподобия. Отношение правдоподобия представляет собой пример индекса, указывающего возможность того, что вероятность действия приводит к истине, и любой другой индикатор может использоваться вместо отношения правдоподобия.
[0061] Модуль 17 оценки отношения правдоподобия также сравнивает первичный курс с эффективным курсом для каждой из вероятностей действия (63, 64 и 63'), как показано на фиг. 5A–5C, чтобы вычислять отношение правдоподобия, и умножает вычисленное отношение правдоподобия на коэффициент (отношение правдоподобия, прогнозированное посредством второго модуля 15 коррекции вероятности выполнения действий). Модуль 17 оценки отношения правдоподобия затем определяет то, что вероятность действия (63, 64 или 63'), оцененного как имеющее наибольшее отношение правдоподобия, представляет собой действие, которое предпринимает другое транспортное средство 52.
[0062] Как описано выше, модуль 10 прогнозирования действий прогнозирует действие другого транспортного средства 52 в соответствии с отношением правдоподобия соответствующих вероятностей действия, оцененным посредством модуля 17 оценки отношения правдоподобия. Термин "действие другого транспортного средства" охватывает профили курса и скорость другого транспортного средства. Курс другого транспортного средства 52 означает профили позиций другого транспортного средства 52 в различные моменты времени.
[0063] Модуль 21 формирования намеченных путей рассматриваемого транспортного средства формирует намеченный путь рассматриваемого транспортного средства 51 на основе действия другого транспортного средства 52, прогнозированного посредством модуля 10 прогнозирования действий. Когда модуль 10 прогнозирования действий прогнозирует действие 63 другого транспортного средства 52, показанного на фиг. 5A, намеченный путь 81 рассматриваемого транспортного средства 51 может формироваться при таком предположении, что другое транспортное средство 52 отклоняется от полосы движения. Рассматриваемое транспортное средство 51 следует намеченному пути 81 таким образом, что рассматриваемое транспортное средство 51 приближается к краю дороги и затем останавливается перед припаркованным транспортным средством 54b. Модуль 21 формирования намеченных путей рассматриваемого транспортного средства в силу этого может формировать намеченный путь, которым может плавно следовать рассматриваемое транспортное средство 51, при предотвращении столкновения с другим транспортным средством 52 и недопущении внезапного замедления или быстрого руления, требуемого в ответ на поведение другого транспортного средства 52. Термин "намеченный путь рассматриваемого транспортного средства 51" охватывает профили позиций рассматриваемого транспортного средства 51 в различные моменты времени и также профили скоростей рассматриваемого транспортного средства 51 в соответствующих позициях.
[0064] Этот вариант осуществления прогнозирует действие другого транспортного средства 52, включающее в себя курс другого транспортного средства 52, согласно поведению другого транспортного средства 52 на карте. Формирование намеченных путей для рассматриваемого транспортного средства 51 на основе курса другого транспортного средства 52 в силу этого соответствует формированию намеченных путей на основе изменения относительного расстояния до другого транспортного средства 52, ускорения или замедления или разности угла ориентации.
[0065] Например, когда другое транспортное средство 52 остается в полосе движения и начинает замедление, как показано на фиг. 5B, поведение другого транспортного средства 52 может предположительно указывать то, что другое транспортное средство 52 готово уступать дорогу рассматриваемому транспортному средству 51, чтобы позволять рассматриваемому транспортному средству 51 перемещаться вперед. В этом случае, намеченный путь рассматриваемого транспортного средства 51 формируется, или рассматриваемое транспортное средство 51 управляется с учетом намерения действия другого транспортного средства 52 таким образом, что рассматриваемое транспортное средство 51 может продолжать движение без замедления либо может ускоряться таким образом, чтобы опережать припаркованные транспортные средства (53, 54a и 54b) до другого транспортного средства 52. Это управление позволяет исключать ситуацию, в которой рассматриваемое транспортное средство 51 и другое транспортное средство 52 уступают дорогу друг другу таким образом, чтобы упрощать поток трафика, соответственно.
[0066] Модуль 22 управления транспортного средства приводит в действие, по меньшей мере, одно из актуатора рулевого управления, актуатора педали акселератора и актуатора педали замедления в соответствии с позицией, вычисленной посредством модуля 5 вычисления позиции на карте, так что рассматриваемое транспортное средство 51 движется таким образом, что оно следует намеченным путем, сформированным посредством модуля 21 формирования намеченных путей рассматриваемого транспортного средства. Хотя вариант осуществления проиллюстрирован со случаем, в котором рассматриваемое транспортное средство 51 управляется в соответствии со сформированным намеченным путем, рассматриваемое транспортное средство 51 может управляться независимо от формирования намеченного пути рассматриваемого транспортного средства 51. В таком случае, рассматриваемое транспортное средство 51 может управляться согласно относительному расстоянию до другого транспортного средства 52 или разности угла ориентации между другим транспортным средством 52 и рассматриваемым транспортным средством 51.
[0067] Ниже описывается способ помощи при движении с использованием устройства помощи при движении, показанного на фиг. 1, со ссылкой на фиг. 2 и фиг. 3. Микрокомпьютер 100, показанный на фиг. 1, может использоваться для того, чтобы функционировать в качестве устройства прогнозирования действий для прогнозирования действия другого транспортного средства 52 таким образом, чтобы реализовывать способ помощи при движении с конечным выводом результата операции обработки, показанной на этапе S06 на фиг. 2.
[0068] Во–первых, на этапе S01, устройство 1 обнаружения объектов обнаруживает поведение объектов около рассматриваемого транспортного средства 51 посредством соответствующих датчиков обнаружения объектов. Процесс переходит к этапу S02, и модуль 2a интегрирования результатов обнаружения интегрирует множество результатов обнаружения, полученных посредством нескольких датчиков обнаружения объектов, и выводит один результат обнаружения в расчете на объект. Модуль 2b отслеживания объектов отслеживает каждый обнаруженный и интегрированный объект.
[0069] Процесс переходит к этапу S03, и устройство 3 оценки позиции рассматриваемого транспортного средства измеряет позицию, ориентацию и скорость рассматриваемого транспортного средства 51 на основе предварительно определенной опорной точки посредством использования датчика обнаружения позиции. Процесс переходит к этапу S04, и устройство 4 получения данных из карты получает картографическую информацию, указывающую структуру дороги, по которой движется рассматриваемое транспортное средство 51.
[0070] Процесс переходит к этапу S05, и модуль 5 вычисления позиции на карте оценивает позицию и ориентацию рассматриваемого транспортного средства 51 на карте согласно позиции рассматриваемого транспортного средства 51, измеряемой на этапе S03, и картографическим данным, полученным на этапе S04. Процесс переходит к этапу S06, и модуль 10 прогнозирования действий прогнозирует действие другого транспортного средства 52 около рассматриваемого транспортного средства 51 в соответствии с результатом обнаружения (поведением другого транспортного средства 52), полученным на этапе S02, и позицией рассматриваемого транспортного средства 52, указываемой на этапе S05.
[0071] Ниже подробнее описывается процесс на этапе S06 со ссылкой на фиг. 3. На этапе S611, модуль 11 определения поведения определяет дорогу, по которой движется другое транспортное средство, и его полосу движения согласно позиции рассматриваемого транспортного средства 51 на карте и поведению объекта, полученному на этапе S02. Процесс переходит к этапу S612, и модуль 12 прогнозирования вероятности выполнения действий прогнозирует вероятность действия другого транспортного средства 52 на основе карты. Например, модуль 12 прогнозирования вероятности выполнения действий прогнозирует намерение действия согласно структуре дороги.
[0072] Процесс переходит к этапу S613, и микрокомпьютер 100 выполняет процесс на этапах S611 и S612 для всех других транспортных средств 52, обнаруженных на этапе S01. После того, как процесс выполняется ("Да" на этапе S613), процесс переходит к этапу S614, и первый модуль 13 коррекции вероятности выполнения действий учитывает стационарный объект, одновременно обнаруженный на этапе S01, чтобы корректировать вероятность действия, прогнозированную на этапе S612. Например, первый модуль 13 коррекции вероятности выполнения действий добавляет намерение действия и первичный курс (63, 65) для отклонения от полосы движения, как показано на фиг. 5A, фиг. 5C или фиг. 7A или намерение действия и первичный курс (64, 66) для выполнения остановки перед стационарным объектом, как показано на фиг. 5B или фиг. 7B.
[0073] Процесс переходит к этапу S615, и когда другой движущийся объект обнаруживается на этапе S01 одновременно с другим транспортным средством 52, первый модуль 13 коррекции вероятности выполнения действий учитывает другой движущийся объект, чтобы корректировать вероятность действия, прогнозированную на этапе S612. Например, когда действие трогания с места припаркованного транспортного средства 54b обнаруживается, первый модуль 13 коррекции вероятности выполнения действий добавляет вероятность действия (намерение действия и первичный курс 63'), как показано на фиг. 5C.
[0074] Процесс переходит к этапу S616, и модуль 18 обнаружения областей в мертвой зоне определяет то, вызывается или нет область 55 в мертвой зоне относительно другого транспортного средства 52 посредством какого–либо объекта, обнаруженного на этапе S01. Когда область 55 в мертвой зоне вызывается ("Да" на этапе S616), процесс переходит к этапу S617, и модуль 19 извлечения перегороженных объектов извлекает объекты (перегороженные объекты), присутствующие в области 55 в мертвой зоне, из объектов, обнаруженных посредством модуля 2a интегрирования результатов обнаружения. В ситуации при движении, показанной на фиг. 4, модуль 19 извлечения перегороженных объектов извлекает припаркованные транспортные средства (54a и 54b), присутствующие в области 55 в мертвой зоне, в качестве перегороженных объектов. Процесс переходит к этапу S618, и когда перегороженные объекты представляют собой движущиеся объекты, модуль 14 обнаружения областей в мертвой зоне прогнозирует курс каждого объекта, присутствующего в области 55 в мертвой зоне, в соответствии с поведением соответствующего объекта.
[0075] Процесс переходит к этапу S619, и второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия соответствующих вероятностей действия, прогнозированных посредством модуля 12 прогнозирования вероятности выполнения действий и первого модуля 13 коррекции вероятности выполнения действий, согласно оцененному времени достижения каждого из рассматриваемого транспортного средства 51 и другого транспортного средства 52. Второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия соответствующих вероятностей действия с учетом условия в области 55 в мертвой зоне, которая может обнаруживаться посредством рассматриваемого транспортного средства 51, но не может обнаруживаться посредством другого транспортного средства 52. В ситуации при движении, показанной на фиг. 4, второй модуль 15 коррекции вероятности выполнения действий оценивает отношение правдоподобия касательно того, какое одно из рассматриваемого транспортного средства 51 и другого транспортного средства 52 должно опережать припаркованные транспортные средства (53, 54a и 54b) первым, на основе припаркованных транспортных средств (54a и 54b), присутствующих в области 55 в мертвой зоне. После этого процесс переходит к этапу S620.
[0076] Когда область в мертвой зоне не вызывается ("Нет" на этапе S616), процесс переходит к этапу S620. Микрокомпьютер 100 выполняет процесс этапов S614–S619 для всех других транспортных средств, обнаруженных на этапе S01. После того, как процесс выполняется ("Да" на этапе S620), процесс переходит к этапу S621, и модуль 16 прогнозирования курса вычисляет эффективный курс (71, 72, см. фиг. 9A и фиг. 9B) другого транспортного средства 52, когда другое транспортное средство 52 сохраняет свое поведение и предположительно должно предпринимать действие на основе намерения прогнозированного действия посредством традиционного способа оценки состояния, такого как фильтрация Калмана.
[0077] Процесс переходит к этапу S622, и модуль 17 оценки отношения правдоподобия сравнивает первичный курс (61–63) с эффективным курсом (71–73) для каждой из вероятностей действия, прогнозированных на этапах S612, S614 и S615. Модуль 17 оценки отношения правдоподобия затем вычисляет отношение правдоподобия соответствующих вероятностей действия на основе разности между первичным курсом и эффективным курсом. Модуль 17 оценки отношения правдоподобия дополнительно взвешивает отношение правдоподобия соответствующих вероятностей действия в соответствии с отношением правдоподобия, оцененным на этапе S619. Модуль 17 оценки отношения правдоподобия определяет то, что вероятность действия, оцененного как имеющее наибольшее отношение правдоподобия, представляет собой действие, которое предпринимает другое транспортное средство 52.
[0078] Процесс переходит к этапу S621, и микрокомпьютер 100 выполняет процесс этапов S621–S622 для всех других транспортных средств, обнаруженных на этапе S01. Конкретный процесс на этапе S06, показанный на фиг. 2, в силу этого завершается.
[0079] Процесс переходит к этапу S07, показанному на фиг. 2, и модуль 21 формирования намеченных путей рассматриваемого транспортного средства формирует намеченный путь рассматриваемого транспортного средства 51 на основе действия другого транспортного средства, прогнозированного на этапе S06. Процесс переходит к этапу S08, и модуль 22 управления транспортного средства управляет рассматриваемым транспортным средством 51 таким образом, чтобы направлять рассматриваемое транспортное средство 51 с возможностью двигаться таким образом, что оно следует намеченным путем, сформированным на этапе S07. Настоящий вариант осуществления проиллюстрирован со случаем, в котором результаты прогнозирования другого транспортного средства отражаются в ходе рассматриваемого транспортного средства, но не ограничен этим случаем. Результаты прогнозирования могут отражаться в различных видах управления относительно поведения рассматриваемого транспортного средства, таких как скорость, ускорение, угловая скорость вращения, профили этих элементов после предварительно определенного времени, управление рулением, управление вождением и управление торможением, с тем чтобы выполнять каждое управление.
[0080] Настоящий вариант осуществления является эффективным не только в ситуации при движении, показанной на фиг. 4, но также и в ситуациях при движении, показанных на фиг. 6 и фиг. 8.
[0081] Фиг. 6 иллюстрирует случай, в котором рассматриваемое транспортное средство 51 движется в левой полосе движения на двухполосной дороге с односторонним движением, и другое транспортное средство 52 движется рядом на правой полосе движения под углом впереди рассматриваемого транспортного средства 51. Другое транспортное средство 52 в этом случае также упоминается как параллельно движущееся транспортное средство. Множество припаркованных транспортных средств (53, 54a и 54b) останавливаются в линию в правой полосе движения перед другим транспортным средством 52. Поскольку рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно опережать несколько припаркованных транспортных средств (53, 54a и 54b), либо рассматриваемое транспортное средство 51 или другое транспортное средство 52 должно уступать дорогу другому, чтобы позволять ему перемещаться вперед первым, аналогично ситуации при движении, показанной на фиг. 4. Рассматриваемое транспортное средство 51 имеет приоритет на этой дороге относительно другого транспортного средства 52.
[0082] Другое транспортное средство 52 может обнаруживать ближайшее припаркованное транспортное средство 53. Это припаркованное транспортное средство 53 вызывает область 55 в мертвой зоне относительно другого транспортного средства 52. Когда другие припаркованные транспортные средства (54a и 54b) включены в область 55 в мертвой зоне, другое транспортное средство 52 не может обнаруживать эти припаркованные транспортные средства (54a и 54b). Рассматриваемое транспортное средство 51, движущееся в левой полосе движения, может обнаруживать все припаркованные транспортные средства (53, 54a и 54b), присутствующие в смежной правой полосе движения.
[0083] В ситуации при движении, показанной на фиг. 6, время (T1s, T2s), которое требуется каждому из рассматриваемого транспортного средства 51 и другого транспортного средства 52 для того, чтобы достигать ближайшего припаркованного транспортного средства 53, не варьируется в зависимости от того, следует или нет учитывать условие в области 55 в мертвой зоне. Напротив, время, которое требуется каждому из рассматриваемого транспортного средства 51 и другого транспортного средства 52 для того, чтобы опережать самое дальнее припаркованное транспортное средство 54b, варьируется в зависимости от того, следует или нет учитывать условие в области 55 в мертвой зоне. Рассматриваемое транспортное средство 51 может сравнивать предполагаемое время T1e, которое требуется рассматриваемому транспортному средству 51 для того, чтобы опережать припаркованное транспортное средство 54b, с предполагаемым временем T2e, которое требуется другому транспортному средству 52 для того, чтобы опережать припаркованное транспортное средство 54b. Тем не менее, другое транспортное средство 52 некорректно сравнивает предполагаемое время T1e', которое требуется рассматриваемому транспортному средству 51 для того, чтобы опережать припаркованное транспортное средство 53, с предполагаемым временем T2e', которое требуется другому транспортному средству 52 для того, чтобы опережать припаркованное транспортное средство 53. Некорректное сравнение может вызывать то, что другое транспортное средство 52 неправильно определяет необходимость перемещаться вперед первым, что приводит другое транспортное средство 52 к отклонению к левой полосе движения, в которой движется рассматриваемое транспортное средство 51, как проиллюстрировано на фиг. 7A.
[0084] Второй модуль 15 коррекции вероятности выполнения действий в силу этого учитывает условие в области 55 в мертвой зоне, с тем чтобы оценивать отношение правдоподобия таким образом, что вероятность действия 65 (фиг. 7A), которое должно предпринимать другое транспортное средство 52, чтобы опережать припаркованные транспортные средства (53, 54a и 54b) первым, выше вероятности действия 66 (фиг. 7A), которое должно предпринимать рассматриваемое транспортное средство 51, чтобы опережать припаркованные транспортные средства (53, 54a и 54b) первым. Вероятность действия 66 касается того, что другое транспортное средство 52 должно предпринимать для того, чтобы выполнять остановку перед припаркованным транспортным средством 53. Вероятность действия 65 касается того, что другое транспортное средство 52 должно предпринимать для того, чтобы отклоняться таким образом, чтобы въезжать в левую полосу движения, в которой движется рассматриваемое транспортное средство 51.
[0085] Хотя не показано, второй модуль 15 коррекции вероятности выполнения действий дополнительно может прогнозировать вероятность действия другого транспортного средства 52, которое сначала должно отклоняться таким образом, чтобы въезжать в полосу движения, в которой движется рассматриваемое транспортное средство 51, с тем чтобы обгонять припаркованное транспортное средство 53, но затем замедляться и выполнять остановку, когда другое транспортное средство 52 распознает присутствие других припаркованных транспортных средств (54a и 54b).
[0086] Фиг. 8 иллюстрирует случай, в котором рассматриваемое транспортное средство 51 и другое транспортное средство 52 движутся в противоположных направлениях к перекрестку на встречной двухполосной дороге. Рассматриваемое транспортное средство 51 движется в своей полосе движения, и другое транспортное средство 52 движется во встречной полосе движения в противоположном направлении. Другое транспортное средство 52, например, показывает намерение поворота направо на перекрестке посредством включения указателя поворота, указывающего правый поворот. Рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно проезжать через перекресток, и либо рассматриваемое транспортное средство 51, либо другое транспортное средство 52 должно уступать дорогу другому, чтобы позволять ему перемещаться вперед первым. Рассматриваемое транспортное средство 51 имеет приоритет на этой дороге относительно другого транспортного средства 52. Два едущих впереди транспортных средства (53a и 53b) движутся вместе с другим транспортным средством 52 впереди рассматриваемого транспортного средства 51. Велосипед 54, намеревающийся пересекать перекресток, присутствует вместе с двумя едущими впереди транспортными средствами (53a и 53b).
[0087] Другое транспортное средство 52 может обнаруживать едущие впереди транспортные средства (53a и 53b). Эти едущие впереди транспортные средства (53a и 53b) вызывают область 55 в мертвой зоне относительно другого транспортного средства 52. Когда велосипед 54 включен в область 55 в мертвой зоне, другое транспортное средство 52 не может обнаруживать велосипед 54. Рассматриваемое транспортное средство 51 может обнаруживать велосипед 54 в этой ситуации.
[0088] Время (T1s, T2s), которое требуется каждому из рассматриваемого транспортного средства 51 и другого транспортного средства 52 для того, чтобы достигать перекрестка, не варьируется в зависимости от того, следует или нет учитывать условие в области 55 в мертвой зоне также в ситуации при движении, показанной на фиг. 8. Тем не менее, время, которое требуется каждому из рассматриваемого транспортного средства 51 и другого транспортного средства 52 для того, чтобы проезжать через перекресток, варьируется в зависимости от того, следует или нет учитывать условие в области 55 в мертвой зоне. Рассматриваемое транспортное средство 51, распознающее присутствие велосипеда 54, предполагает относительно длительный период (T2e) времени, которое требуется другому транспортному средству 52 для того, чтобы проезжать через перекресток, поскольку другое транспортное средство 52 должно ожидать, когда велосипед 54 пересечет перекресток. Тем не менее, другое транспортное средство 52 предполагает относительно короткий период (T2e') времени, необходимый для его действия, поскольку другое транспортное средство 52 неспособно распознавать присутствие велосипеда 54 в области 55 в мертвой зоне. Другое транспортное средство 52 в силу этого может некорректно сравнивать предполагаемое время T1e с предполагаемым временем T2e'. Некорректное сравнение может приводить к тому, что другое транспортное средство 52 неправильно определяет то, что другое транспортное средство 52 должно перемещаться вперед первым, чтобы въезжать на перекресток до рассматриваемого транспортного средства 51.
[0089] Когда другое транспортное средство 52 обнаруживает велосипед 54, другое транспортное средство 52 может определять то, следует или нет начинать выполнение правого поворота, с учетом времени действия между другим транспортным средством 52 и рассматриваемым транспортным средством 51 и времени действия между другим транспортным средством 52 и велосипедом 54. Когда другое транспортное средство 52 не обнаруживает велосипед 54, другое транспортное средство 52 неточно определяет то, следует или нет начинать выполнение правого поворота, только с учетом времени действия между другим транспортным средством 52 и рассматриваемым транспортным средством 51 без учета времени действия между другим транспортным средством 52 и велосипедом 54.
[0090] Второй модуль 15 коррекции вероятности выполнения действий в силу этого учитывает велосипед 54, присутствующий в области 55 в мертвой зоне, с тем чтобы оценивать отношение правдоподобия таким образом, что вероятность действия, которое должно предпринимать другое транспортное средство 52, чтобы въезжать на перекресток первым, выше вероятности действия, которое должно предпринимать рассматриваемое транспортное средство 51, чтобы въезжать на перекресток первым. Это обеспечивает возможность рассматриваемому транспортному средству 51 двигаться плавно при недопущении внезапного замедления или быстрого руления.
[0091] Второй модуль 15 коррекции вероятности выполнения действий дополнительно может прогнозировать вероятность действия другого транспортного средства 52, которое должно первым въезжать на перекресток, с тем чтобы поворачивать направо, но затем замедляться и выполнять остановку (не показано), когда другое транспортное средство 52 распознает присутствие велосипеда 54, пересекающего перекресток, как и в случае ситуаций при движении, показанных на фиг. 4 и фиг. 6.
[0092] Как описано выше, вариант осуществления позволяет достигать следующих преимуществ.
[0093] Микрокомпьютер 100 (пример контроллера) задает область 55 в мертвой зоне относительно другого транспортного средства 52 на карте, указывает объект, присутствующий в области 55 в мертвой зоне, из объектов, обнаруженных посредством датчиков обнаружения объектов, и прогнозирует действие, которое должно предпринимать другое транспортное средство 52, в соответствии с указанным объектом. Микрокомпьютер 100 в силу этого может точно прогнозировать действие другого транспортного средства 52 на основе объекта, который может обнаруживать другое транспортное средство 52, когда имеются объекты в области 55 в мертвой зоне относительно другого транспортного средства 52.
[0094] Микрокомпьютер 100 может прогнозировать действие другого транспортного средства 52 в зависимости от поведения объекта, присутствующего в области 55 в мертвой зоне. Микрокомпьютер 100 в силу этого может прогнозировать действие другого транспортного средства 52 более точно, когда объект, присутствующий в области 55 в мертвой зоне, представляет собой движущийся объект.
[0095] Микрокомпьютер 100 может задавать область 55 в мертвой зоне относительно другого транспортного средства 52 только в участке с вероятностью того, что другое транспортное средство 52 должно двигаться в него, в соответствии с позицией другого транспортного средства 52, направлением движения другого транспортного средства 52 и структурой дороги около другого транспортного средства 52. Это позволяет уменьшать вычислительную нагрузку микрокомпьютера 100 без уменьшения точности прогнозирования действия другого транспортного средства 52, эффективно вычисляя область 55 в мертвой зоне, соответственно. Скорость обработки вычисления микрокомпьютера 100 также может повышаться.
[0096] Микрокомпьютер 100 может прогнозировать действие, которое должно предпринимать другое транспортное средство 52, когда имеется объект, присутствующий в области 55 в мертвой зоне, которую не распознает другое транспортное средство 52. Микрокомпьютер 100 в силу этого может точно прогнозировать действие другого транспортного средства 52 на основе объекта, который может обнаруживать другое транспортное средство 52, когда имеются объекты в области 55 в мертвой зоне относительно другого транспортного средства 52.
[0097] Микрокомпьютер 100 может прогнозировать вероятность действия, которое должно предпринимать другое транспортное средство 52, когда имеется объект, присутствующий в области 55 в мертвой зоне, которую другое транспортное средство 52 не распознает, в соответствии с структурой дороги около рассматриваемого транспортного средства 51 и сравнивает прогнозированную вероятность действия с поведением другого транспортного средства 52, с тем чтобы прогнозировать действие другого транспортного средства 52. Микрокомпьютер 100 в силу этого может точно прогнозировать действие другого транспортного средства 52 на основе объекта, который может обнаруживать другое транспортное средство 52.
[0098] Микрокомпьютер 100 задает мертвую зону относительно пассажира или водителя в другом транспортном средстве 52 в качестве области 55 в мертвой зоне. Микрокомпьютер 100 в силу этого может точно оценивать область 55 в мертвой зоне, с тем чтобы точно прогнозировать операцию или поведение (включающее в себя внезапную операцию, такую как внезапное торможение или быстрое руление) другого транспортного средства 52, вызываемое пассажиром или водителем в ответ на непредвиденный объект.
[0099] Микрокомпьютер 100 задает, в качестве области 55 в мертвой зоне, область за исключением области обнаружения, обнаруженной посредством датчика в другом транспортном средстве 55. Это приводит к точной оценке области 55 в мертвой зоне таким образом, что микрокомпьютер 100 может точно прогнозировать поведение (включающее в себя курс), вызываемое при обнаружении объекта в области 55 в мертвой зоне посредством другого транспортного средства 52, когда другое транспортное средство 52, допускающее управление автономным вождением или управление помощью при движении (автономное торможение), обнаруживает окружающую обстановку посредством использования датчика, смонтированного на другом транспортном средстве 52, чтобы выполнять управление транспортным средством в зависимости от обнаруженного объекта.
[0100] Микрокомпьютер 100 управляет рассматриваемым транспортным средством 51 в соответствии с прогнозированным действием другого транспортного средства 52. Рассматриваемое транспортное средство 51 в силу этого может управляться с уменьшенным дискомфортом пассажира или водителя, посредством управления автономным вождением или управления помощью при движении (включающего в себя автономное торможение), включающего в себя, например, операцию предварительного замедления, перемещения к краю дороги и учета порядка проезда полос движения. Предварительное прогнозирование действия другого транспортного средства 52 обеспечивает возможность рассматриваемому транспортному средству 51 не допускать внезапного изменения своего поведения, такого как внезапное торможение или быстрое руление, с тем чтобы предотвращать испытывание пассажиром или водителем в рассматриваемом транспортном средстве 51 некомфортного ощущения.
[0101] Микрокомпьютер 100 формирует намеченный путь рассматриваемого транспортного средства 51 на основе прогнозированного действия другого транспортного средства 52 и управляет другим транспортным средством 51 в соответствии с намеченным путем рассматриваемого транспортного средства 51. Микрокомпьютер 100 в силу этого может управлять рассматриваемым транспортным средством 51 безопасно относительно любого риска и плавно при недопущении внезапного замедления или быстрого руления рассматриваемого транспортного средства 51, вызываемого в ответ на поведение другого транспортного средства 52.
[0102] Микрокомпьютер 100 сравнивает поведение другого транспортного средства 52 с вероятностью действия, которое должно предпринимать другое транспортное средство 52, с тем чтобы управлять рассматриваемым транспортным средством 51 в соответствии с вероятностью действия другого транспортного средства 52, когда поведение другого транспортного средства 52 является аналогичным вероятности действия. Рассматриваемое транспортное средство 51 в силу этого может предпринимать соответствующее начальное действие в зависимости от действия другого транспортного средства 52, неспособного распознавать перегороженный объект, фактически присутствующий в области 55 в мертвой зоне. Это позволяет не допускать внезапного изменения поведения рассматриваемого транспортного средства 51, с тем чтобы предотвращать испытывание пассажиром или водителем некомфортного ощущения.
[0103] Микрокомпьютер 100 сравнивает поведение другого транспортного средства 52 с вероятностью действия, которое должно предпринимать другое транспортное средство 52, с тем чтобы управлять рассматриваемым транспортным средством 51 в соответствии с поведением другого транспортного средства 52, когда поведение другого транспортного средства 52 не является аналогичным вероятности действия. Рассматриваемое транспортное средство 51 в силу этого может предпринимать соответствующее начальное действие на основе фактического поведения другого транспортного средства 52 независимо от того, имеются или нет перегороженные объекты в области 55 в мертвой зоне, так чтобы не допускать внезапного изменения поведения рассматриваемого транспортного средства 51, с тем чтобы предотвращать испытывание пассажиром или водителем некомфортного ощущения.
[0104] Хотя настоящее изобретение описывается выше в отношении варианта осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным вышеприведенными описаниями, и различные альтернативы и модификации должны становиться очевидными для специалистов в данной области техники.
[0105] Хотя вышеописанный вариант осуществления проиллюстрирован со случаем, в котором рассматриваемое транспортное средство 51 находится в режиме автономного вождения, допускающем автономное движение, рассматриваемое транспортное средство 51 может находиться в режиме вождения вручную, управляемом водителем из рассматриваемого транспортного средства 51. В таком случае, микрокомпьютер 100 может управлять, для работы рассматриваемого транспортного средства 51 (для помощи при вождении), динамиком, дисплеем и пользовательским интерфейсом для выдачи инструкций водителю при управлении рулем, акселератором и тормозом посредством использования голоса или изображений.
Список номеров ссылок
[0106] 1 – устройство обнаружения объектов (датчик обнаружения объектов)
51 – рассматриваемое транспортное средство
52 – другое транспортное средство
53 – припаркованное транспортное средство (объект)
53a, 53b – едущее впереди транспортное средство (объект)
54 – велосипед (объект в области в мертвой зоне)
54a, 54b – припаркованное транспортное средство (объект в области в мертвой зоне),
55 – область в мертвой зоне
100 – микрокомпьютер (контроллер)
Реферат
Изобретение относится к способу и к устройству помощи при движении. Способ помощи при движении для прогнозирования действия другого транспортного средства содержит этапы, на которых обнаруживают другое транспортное средство и объекты около рассматриваемого транспортного средства, задают область в мертвой зоне, которая представляет собой мертвую зону относительно другого транспортного средства, указывают объект, присутствующий в области в мертвой зоне, и прогнозируют действие, которое предпринимает другое транспортное средство, в соответствии с указанным объектом. Устройство помощи при движении для прогнозирования действия другого транспортного средства содержит датчик обнаружения объектов, выполненный с возможностью обнаруживать другое транспортное средство и объекты около рассматриваемого транспортного средства и контроллер, выполненный с возможностью прогнозировать действие другого транспортного средства. Достигается повышение безопасности водителя транспортного средства. 2 н. и 10 з.п. ф-лы, 13 ил.
Комментарии