Устройство построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой - RU180088U1
Код документа: RU180088U1
Чертежи
Описание
Устройство относится к радиолокации, в частности к радиолокационным средствам обзора земной поверхности, и может быть использовано при дистанционном зондировании земной поверхности.
Широко известны способы (RU 2278398, RU 2211461, RU 2529523, RU 2207585) построения радиолокационного изображения по информации, накапливаемой на борту носителя радиолокационной станции с синтезированной апертурой (РСА). При этом на борту производится запись, обнаружение, первичная обработка информации, сжатие и передача данных на базовую станцию для последующего построения радиолокационного изображения (РЛИ). Также известны способы построения РЛИ на борту РСА, но в режиме буферизации коротких сигналов-откликов зондирующих импульсов без реализации потоковой временной обработки в режиме реального времени.
Наиболее близким к заявленному техническому решению является устройство для синтеза радиолокационного изображения, описанное в RU 2211461 - прототип, работа которого заключается в том, что принимается входной комплексный сигнал (n, t) с дальности t в зондировании n, отличающийся тем, что входной комплексный сигнал (n, t) детектируют по амплитуде, затем обрабатывают дискретным преобразованием Фурье по дальности t, спектральные комплексные компоненты умножают на вещественную опорную функцию, не зависящую от времени, траектории и динамических параметров движения, результат подвергают обратному дискретному преобразованию Фурье, детектируют по амплитуде, преобразуют в двумерный матричный сигнал, каждый элемент матричного сигнала накапливают по зондированиям n и результирующий матричный сигнал выдают на выход.
Известный способ и устройство обладают следующими недостатками.
Анализ производится в частотной области, что приводит к необходимости выполнения большого количества комплексных операций при умножении на опорную функцию и соответственно к значительному увеличению времени обработки, вследствие чего построение РЛИ происходит с задержкой.
Детектирование сигнала производится по амплитуде, что накладывает ограничения на характеристики помехозащищенности РСА. Для корректной работы РСА требуются положительные соотношения сигнал/шум на входе блока обработки информации.
Представление результатов обработки в матричном виде больших размерностей позволяет обеспечить только покадровое построение серии РЛИ, что приводит к увеличению времени передачи выходных данных, увеличению периодов повторения зондирующих импульсов и, как следствие, уменьшению разрешения РЛИ по азимуту.
Целью полезной модели является обеспечение возможности получения РЛИ в режиме жесткого реального времени с требуемым разрешением на борту атмосферных и внеатмосферных летательных аппаратов.
Указанная цель достигается тем, что обработка откликов зондирующих линейно частотно-модулированных сигналов от объектов, включающая в себя сжатие по дальности t и сжатие по азимуту циклов зондирования n, производится на борту носителя радиолокационной станции с синтезированной апертурой во временной области на высокой (до 100МГц) скорости с применением сверхбольших интегральных схем (СБИС) в составе вычислительного блока. Обнаружение производится с применением методов корреляционного анализа, где в качестве опорной функции используется знаковое представление зондирующего сигнала во временной области. Использование СБИС позволяет обеспечить распараллеливание вычислительных процессов, возможность работы со сверхвысокочастотными сигналами (частота дискретизации цифроаналогового преобразователя (ЦАП) - до 3 ГГц, аналогово-цифрового преобразователя (АЦП) - до 1,5 ГГц) и, как следствие, получение РЛИ с разрешением до 0,5 м в режиме жесткого реального времени и высокую (до 600 Мб/с) скорость передачи выходных данных - строк радиолокационного изображения для последующей визуализации (фиг. 1).
Устройство состоит из следующих функциональных блоков: блок цифровой обработки сигналов (ЦОС), блок радиочастотного тракта.
Блок радиочастотного тракта устройства работает по принципу прямого преобразования радиосигналов. Блок ЦОС позволяет синтезировать и анализировать радиосигналы непосредственно на несущей частоте в L-диапазоне без необходимости дальнейших нелинейных частотных преобразований. Передающий и приемный тракты радиолокатора выполняют функции усиления и фильтрации синтезированного и принимаемого радиосигналов. Синтез радиосигналов производится с помощью цифрового вычислительного синтезатора. Управление логикой работы радиотракта производится с помощью логического автомата, контролируемого с внешнего вычислительного устройства.
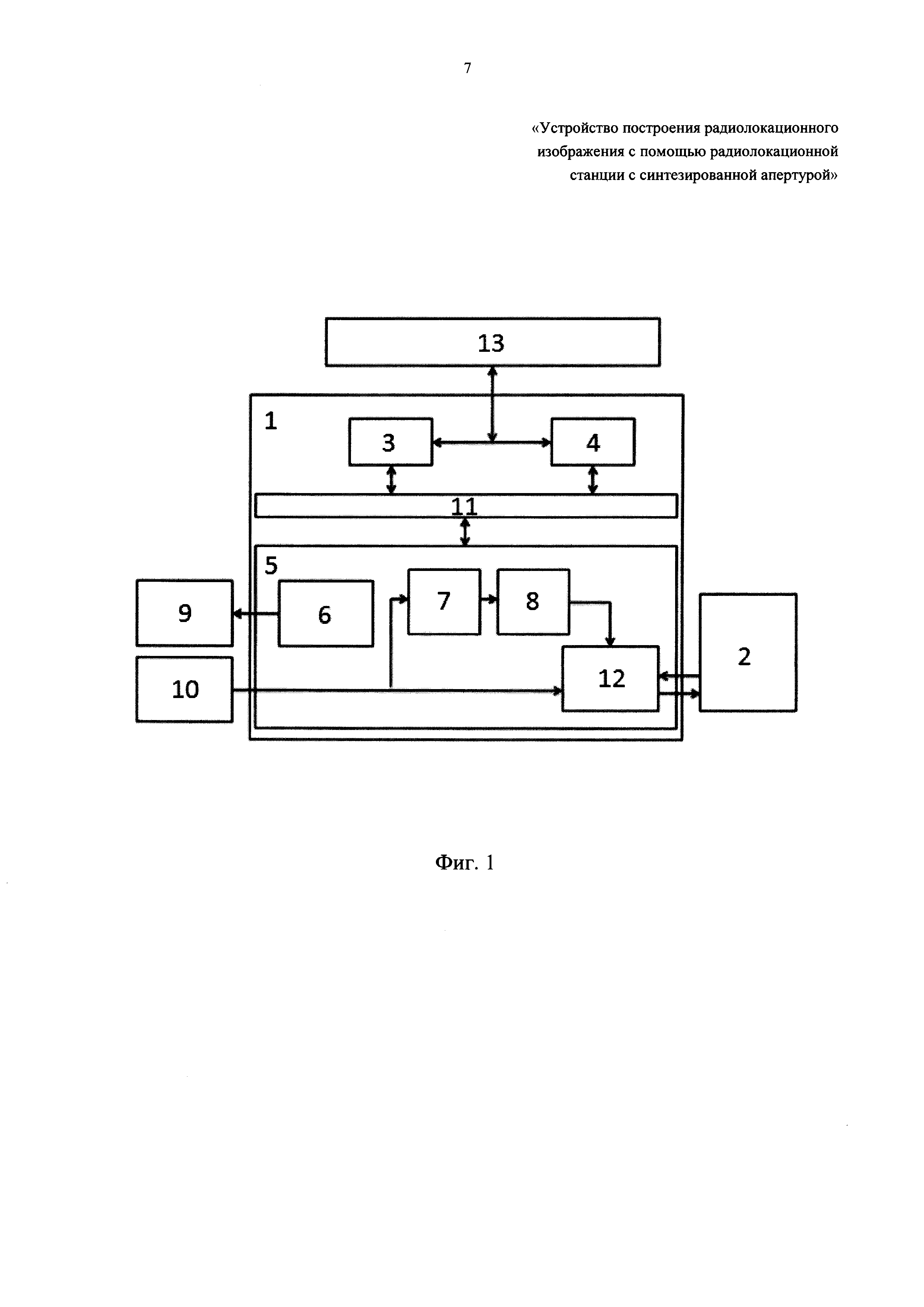
В состав блока ЦОС входит встроенное программное обеспечение (ПО), которое состоит из нескольких составных частей и загружается в две микросхемы - систему-на-кристалле (1) и процессор ввода/вывода (2). Система-на-кристалле включает двухъядерный процессор ЦПУ0 (3) и ЦПУ1 (4) и СБИС (5). В состав СБИС входит цифровой синтезатор (6), модуль сжатия по дальности (7), представляющий собой поле умножителей и сумматоров, обеспечивающее распараллеливание расчетов с разрешением РЛИ по дальности до 0,5 м в режиме жесткого реального времени, и модуль сжатия по азимуту (8). Структура аппаратного обеспечения блока ЦОС с отображением отдельных частей встроенного ПО показана на фиг. 1.
Блок радиочастотного тракта соединен с ЦАП (9) и АЦП (10), установленными в блоке ЦОС. ЦАП и АЦП подключены к СБИС, которая имеет общую шину данных (11) с двухъядерным процессором и соединена с процессором ввода/вывода информации. Одно из ядер процессора соединено с шиной данных персонального компьютера оператора.
Устройство работает следующим образом.
При включении питания устройство автоматически загружается и запускается. Цифровой синтезатор обеспечивает синтез зондирующего сигнала с заданными параметрами, которым через блок радиочастотного тракта и подключенную к нему антенную решетку облучается исследуемый участок земной поверхности. После отражения от объекта сигнал оцифровывается на АЦП и в реальном времени передается в модуль сжатия по дальности. Параллельно в оперативное запоминающее устройство (ОЗУ) (12) записывается осциллограмма оцифрованного сигнала для дальнейшего вывода на экран оператора (13) для контроля. В модуле сжатия по дальности производится конвейерная свертка оцифрованного сигнала с опорной функцией, которая задается в начале сеанса. По мере выхода с вычислительного конвейера результат сжатия по дальности сохраняется и передается в модуль сжатия по азимуту, реализованный в виде дерева сумматоров. По мере получения пикселей РЛИ информация о них (относительная яркость) записывается в ОЗУ для последующей передачи оператору либо в долговременное запоминающее устройство.
Использование СБИС в составе заявляемого устройства обеспечивает в сравнении с прототипом повышенную скорость построения РЛИ и помехозащищенность при обнаружении откликов с уровнем сигнала меньше нуля, а также возможность реконфигурации устройства, как до запуска, так и во время работы. Таким образом, заявляемое устройство предполагается использовать при зондировании земной поверхности с атмосферных и внеатмосферных летательных аппаратов на дистанциях от 0,1 до 1000 км зондирования для частотно-модулированных и частотно-манипулированных сигналов.
Реферат
Устройство построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой относится к радиолокации, в частности к радиолокационным средствам обзора земной поверхности, и может быть использовано при дистанционном зондировании земной поверхности.Использование заявляемого устройства позволяет обеспечивать поточный прием, обработку откликов зондирующего сигнала и высокоскоростную (до 600 Мб/с) передачу РЛИ с разрешением до 0,5 м в режиме реального времени с возможностью настройки параметров устройства при зондировании земной поверхности с атмосферных и внеатмосферных летательных аппаратов на дистанциях от 0,1 до 1000 км зондирования для частотно-модулированных и частотно-манипулированных сигналов.Обработка откликов зондирующих сигналов от объектов земной поверхности производится во временной области с применением сверхбольших интегральных схем в составе заявляемого устройства.
Формула
Документы, цитированные в отчёте о поиске
Радиолокационная система и способ для радиолокатора с синтезированной апертурой
Комментарии