Транспортное средство вертикальной посадки, система и способ обеспечения осведомленности об обстановке - RU2753992C2
Код документа: RU2753992C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к системам транспортных средств вертикальной посадки, а в частности, к системам обеспечения осведомленности об обстановке для транспортных средств вертикальной посадки.
УРОВЕНЬ ТЕХНИКИ
[002] Посадки на вершинах, например с приближением к возвышенным участкам местности, или посадки в небольших районах посадки, выполняемые, например, транспортными средствами вертикальной посадки, считаются задачами высокой рабочей нагрузки, требующими интенсивной работы экипажа. Во время таких посадок непреднамеренное нахождение транспортного средства вертикальной посадки вблизи земли или других препятствий или проведение посадок в условиях плохой видимости (например, песок, пыль, снег, туман, недостаток или отсутствие света) может привести к ударам лопастей, включая удары о деревья, удары при посадках на вершинах или удары о другие препятствия.
[003] Как правило, в целях предотвращения этих ударов лопастей и/или ударов при посадках на вершинах член экипажа, находящийся в кабине, частично высовывается из транспортного средства вертикальной посадки для осмотра области снизу транспортного средства вертикальной посадки и обеспечения вербальной обратной связи с летным экипажем в отношении препятствий. Однако в условиях плохой видимости становится сложнее обеспечивать точную обратную связь в отношении положения транспортного средства вертикальной посадки.
[004] Вышеуказанные проблемы не решаются обычными системами транспортных средств вертикальной посадки.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] Соответственно, могут оказаться полезными устройства и способы, предназначенные для решения по меньшей мере вышеуказанных проблем.
[006] Ниже приводится неисчерпывающий перечень примеров объекта настоящего изобретения, которые могут быть заявлены или могут не быть заявлены в формуле изобретения.
[007] Один пример объекта настоящего изобретения относится к транспортному средству вертикальной посадки, содержащему: корпус, образующий оболочку, и имеющему по меньшей мере одно крыло, соединенное с корпусом, по меньшей мере один датчик приближения, соединенный с корпусом, и систему управления полетом, включающую в себя процессор управления и интерфейс оператора, при этом указанный по меньшей мере один датчик приближения соединен с процессором управления, выполненным с возможностью приема сигналов приближения от указанного по меньшей мере одного датчика приближения и с возможностью представления, посредством интерфейса оператора и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от транспортного средства вертикальной посадки относительно оболочки и указанного по меньшей мере одного крыла.
[008] Еще один пример объекта настоящего изобретения относится к системе обеспечения осведомленности об обстановке для транспортного средства вертикальной посадки, имеющего корпус, образующий оболочку, и имеющего по меньшей мере одно крыло, соединенное с корпусом, содержащей: по меньшей мере один датчик приближения, соединенный с корпусом и выполненный с возможностью регистрации препятствий по периметру одного или более из оболочки и указанного по меньшей мере одного крыла, и систему управления полетом, включающую в себя процессор управления и интерфейс оператора, причем указанный по меньшей мере один датчик приближения соединен с процессором управления, выполненным с возможностью приема сигналов приближения от указанного по меньшей мере одного датчика приближения и с возможностью представления, посредством интерфейса оператора и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от периметра указанных одного или более из оболочки и указанного по меньшей мере одного крыла.
[009] Еще один пример объекта настоящего изобретения относится к способу обеспечения осведомленности об обстановке для оператора транспортного средства вертикальной посадки, включающему: соединение по меньшей мере одного датчика приближения с корпусом транспортного средства вертикальной посадки, при этом корпус образует оболочку, а транспортное средство имеет по меньшей мере одно крыло, соединенное с корпусом, прием сигналов приближения от указанного по меньшей мере одного датчика приближения процессором управления системы управления полетом транспортного средства вертикальной посадки, и представление процессором управления, посредством интерфейса оператора системы управления полетом и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от транспортного средства вертикальной посадки относительно оболочки и указанного по меньшей мере одного крыла.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] После описания, таким образом, примеров раскрытия настоящего изобретения в общих понятиях будет сделана ссылка на прилагаемые чертежи, которые необязательно выполнены в масштабе и на которых одинаковые ссылочные позиции обозначают одинаковые или сходные части на нескольких видах, на которых:
[0011П] на ФИГ. 1 показана структурная схема системы обеспечения осведомленности об обстановке в соответствии с одним или более аспектами раскрытия настоящего изобретения;
[0012] на ФИГ. 2 схематично показано транспортное средство вертикальной посадки в соответствии с одним или более аспектами раскрытия настоящего изобретения;
[0013] на ФИГ. 3 схематично показано транспортное средство вертикальной посадки по ФИГ. 2 с системой обеспечения осведомленности об обстановке в соответствии с одним или более аспектами раскрытия настоящего изобретения;
[0014] на ФИГ. 4А-4С схематично показана система обеспечения осведомленности об обстановке по ФИГ. 2 при работе на транспортном средстве вертикальной посадки в соответствии с одним или более аспектами раскрытия настоящего изобретения;
[0015] на ФИГ. 5А-5В схематично показана система обеспечения осведомленности об обстановке по ФИГ. 2 при работе на транспортном средстве вертикальной посадки в соответствии с одним или более аспектами раскрытия настоящего изобретения;
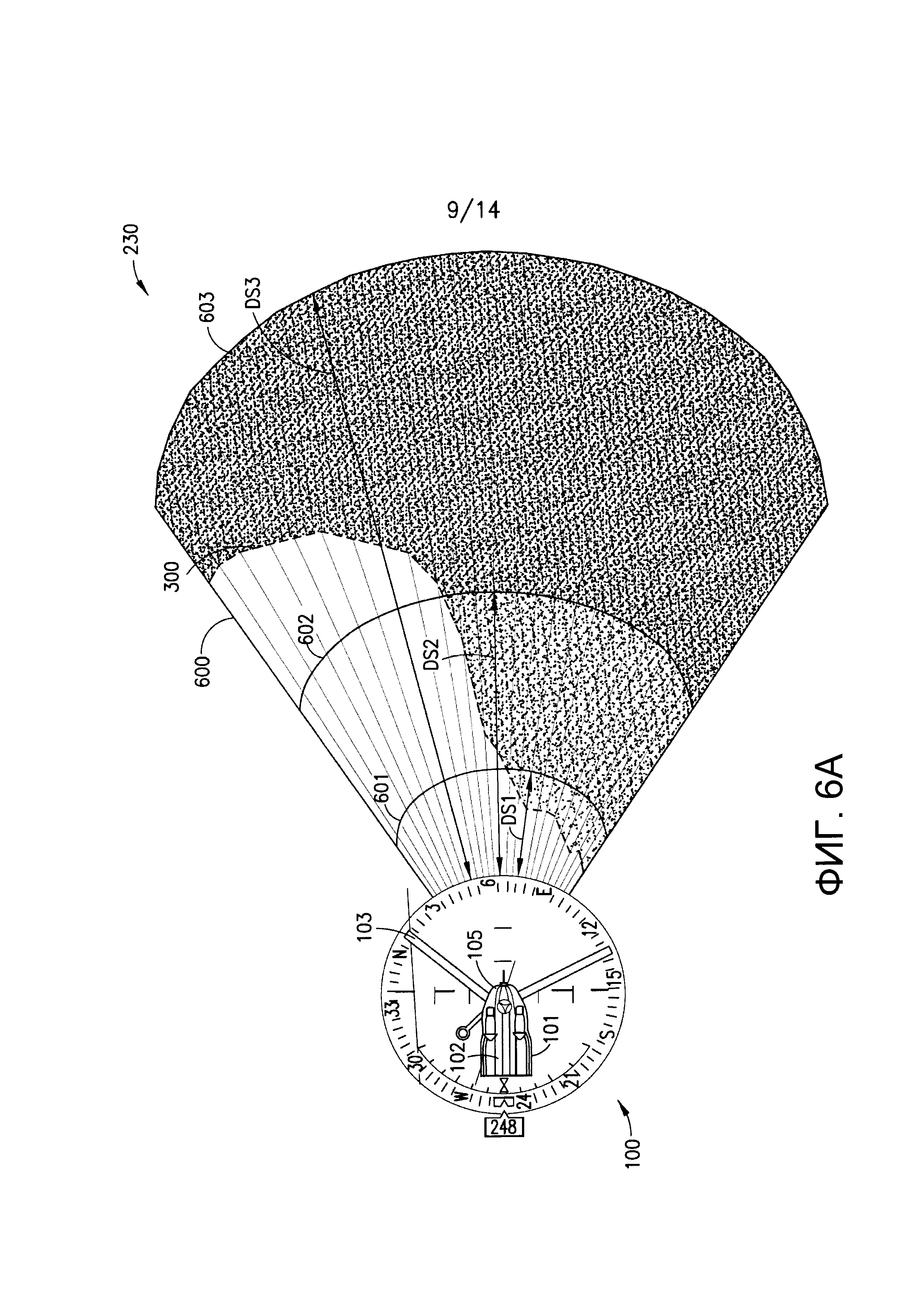
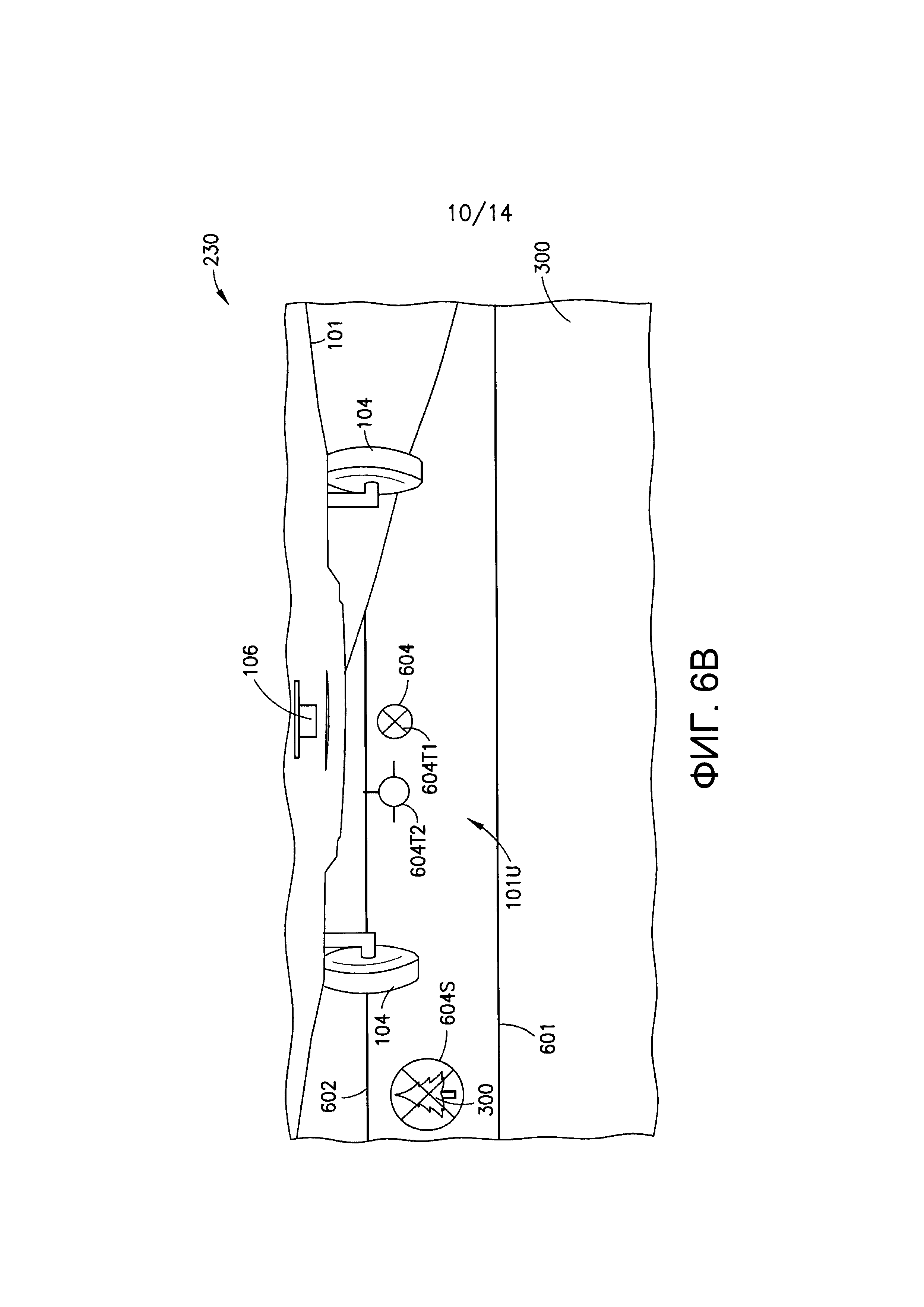
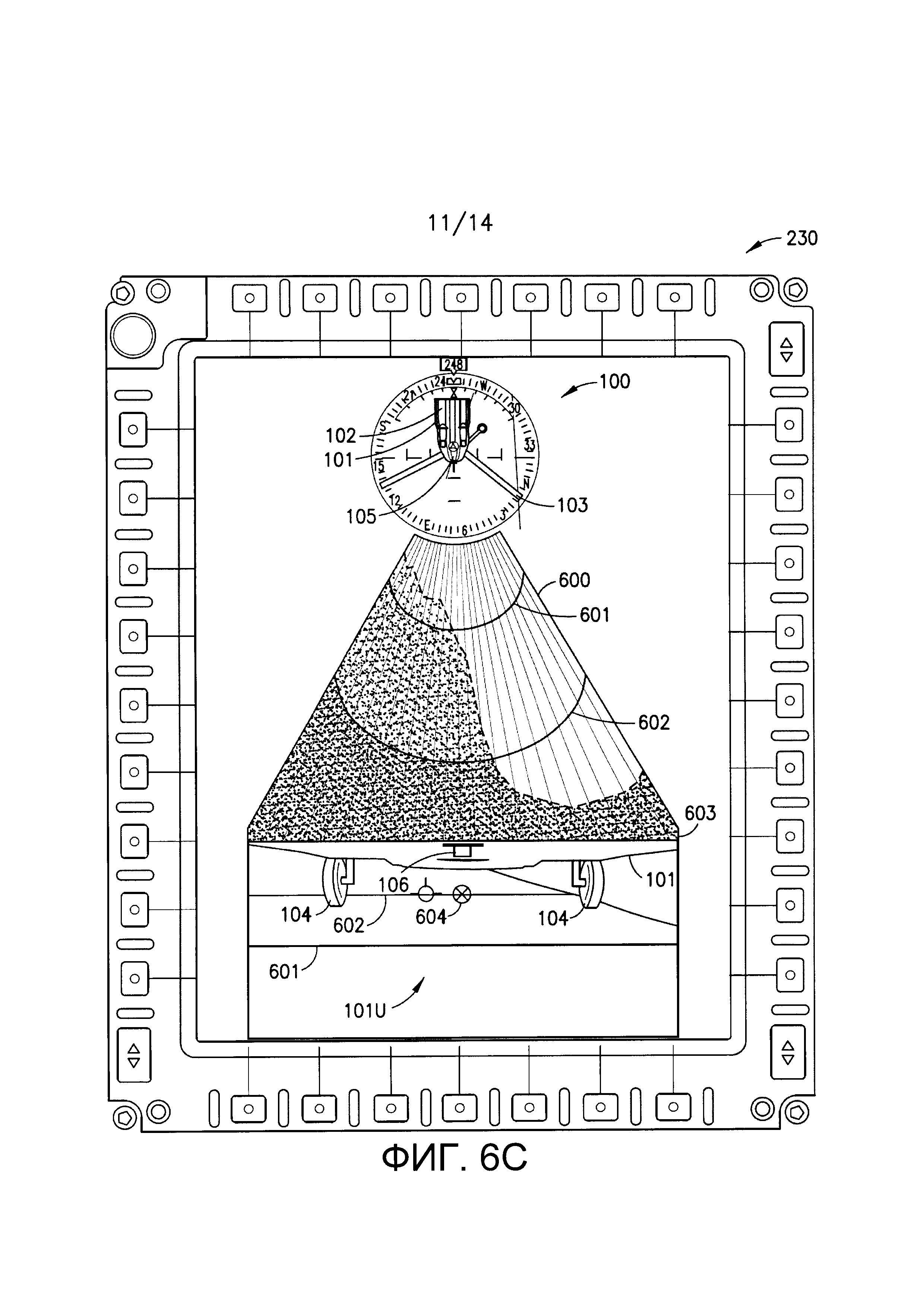
[0016] на ФИГ. 6А-6С схематично показана часть интерфейса оператора в соответствии с одним или более аспектами раскрытия настоящего изобретения;
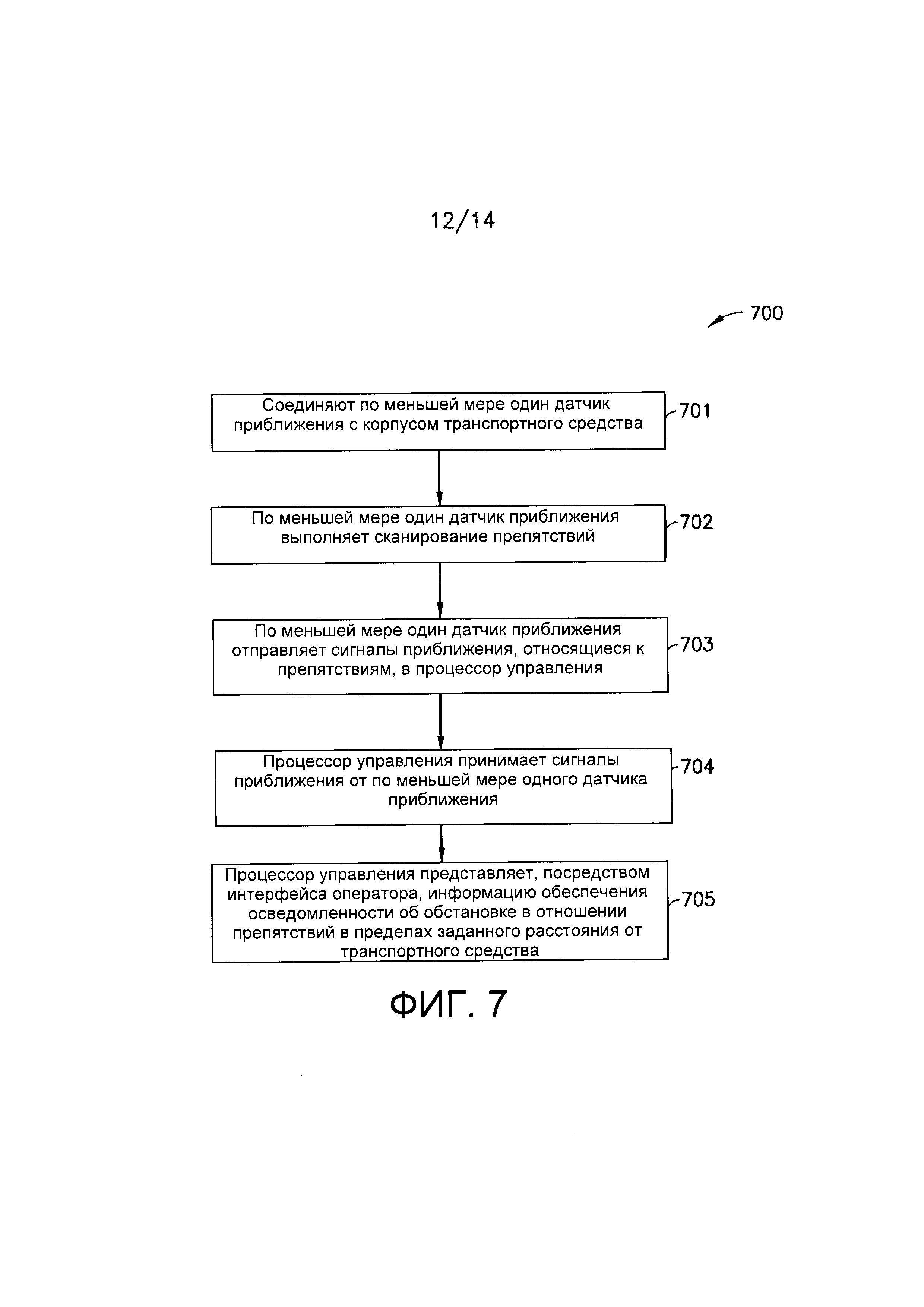
[0017] на ФИГ. 7 показана блок-схема способа работы системы обеспечения осведомленности об обстановке в соответствии с одним или более аспектами раскрытия настоящего изобретения;
[0018] на ФИГ. 8 показана структурная схема способа изготовления и обслуживания летательного аппарата и
[0019] на ФИГ. 9 показан пример изображения, представленного для оператора в обратной ориентации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0020] Со ссылкой на ФИГ. 1, аспекты раскрытия настоящего изобретения, описанные в настоящем документе, позволяют создать систему 200 обеспечения осведомленности об обстановке для транспортного средства 100 вертикальной посадки, которая предоставляет информацию 231 обеспечения осведомленности об обстановке, включающую одно или более из визуальных, акустических и тактильных сигналов, для экипажа транспортного средства 100 вертикальной посадки. Информация 231 обеспечения осведомленности об обстановке предоставляет, например, информацию о приближении для экипажа при работе транспортного средства 100 вертикальной посадки вблизи, например, земли, наземного персонала и подвешенного груза. Согласно одному аспекту система 200 обеспечения осведомленности об обстановке обеспечивает выдачу, например, системы символов, как будет подробно описано ниже, для экипажа и/или данных для управления системой при ручной, полуавтоматической или полностью автоматической эксплуатации транспортного средства 100 вертикальной посадки в сценариях с высокой рабочей нагрузкой и в различных метеорологических и эксплуатационных условиях.
[0021] Согласно одному аспекту система 200 обеспечения осведомленности об обстановке включает в себя одно или более из камер видеонаблюдения, лазерных дальномеров и данных о местности, как будет описано ниже, для создания уникальной системы символов, которой в настоящее время нет ни на одном транспортном средстве 100 вертикальной посадки и которая облегчает рабочую нагрузку на экипаж транспортного средства вертикальной посадки и предоставляет экипажу по меньшей мере данные о приближении. Использование этих данных в сочетании с системой управления обеспечивает создание тактильных сигналов, таких как, например, потряхивание рукоятки или силовую обратную связь/сопротивление в органах управления полетом, для предупреждения экипажа о препятствии (препятствиях) 300 (см. ФИГ. 3) возле транспортного средства 100 вертикальной посадки. Кроме того, когда данные о приближении связывают или иным образом реализуют с протоколами автономии, например с автоматическими системами полета, автоматические или полуавтоматические посадки или зависание транспортного средства 100 вертикальной посадки могут быть обеспечены в сценариях с высокой рабочей нагрузкой и в различных метеорологических и эксплуатационных условиях. Система 200 обеспечения осведомленности об обстановке может снизить нагрузку на экипаж и повысить точность посадки и/или зависания во время, например, выполняемых вручную, полуавтоматических и полностью автоматических посадок транспортного средства 100 вертикальной посадки.
[0022] Ниже представлены иллюстративные, неисчерпывающие примеры объекта настоящего изобретения, которые могут быть заявлены или могут не быть заявлены в формуле изобретения.
[0023] Со ссылкой на ФИГ. 1 и 2, аспекты раскрытия настоящего изобретения, описанные в настоящем документе, раскрывают примерную систему 200 обеспечения осведомленности об обстановке. Согласно одному аспекту, хотя система 200 обеспечения осведомленности об обстановке, описанная в настоящем документе, описана в отношении транспортного средства 100 вертикальной посадки, такого как вертолет BOEING® СН-47 «Чинук», согласно другим аспектам транспортное средство 100 вертикальной посадки может представлять собой любое подходящее транспортное средство вертикальной посадки с фиксированным крылом, с наклонным крылом, с наклонным несущим винтом или винтокрылое транспортное средство, такое как, например, штурмовик вертикального взлета и посадки AV-8 «Харриер», F-35B (единый ударный истребитель), конвертоплан V-22 Osprey и т.д.
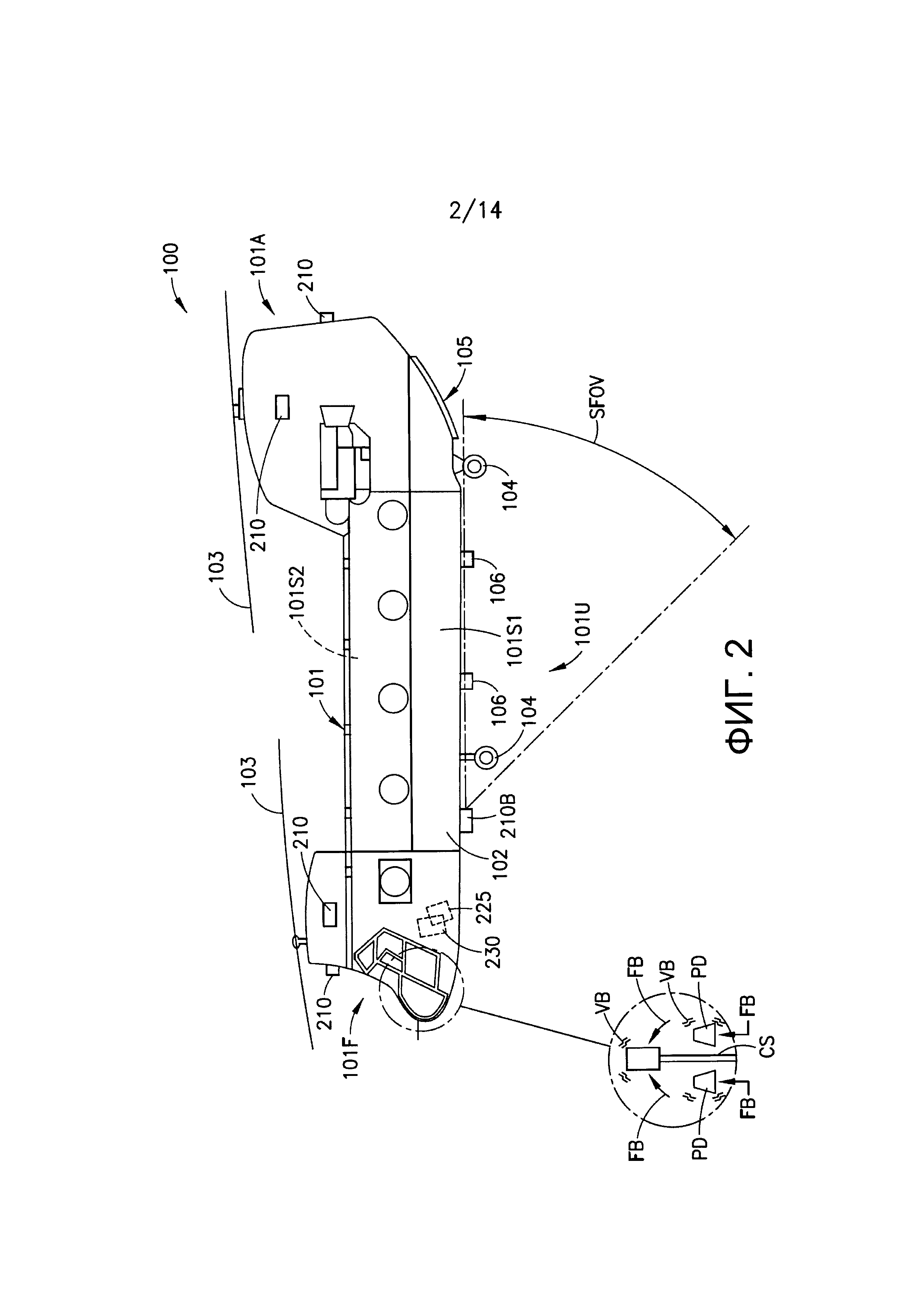
[0024] Согласно одному аспекту транспортное средство 100 вертикальной посадки включает в себя корпус 101, образующий оболочку 102, и по меньшей мере одно крыло 103. Согласно одному аспекту корпус 101 включает в себя по меньшей мере боковые стороны 101S1, 101S2, переднюю часть 101F, заднюю часть 101А и нижнюю часть 101U. Согласно одному аспекту указанное по меньшей мере одно крыло 103 соединено с корпусом 101 и может быть неподвижным крылом или поворотным крылом. Согласно этому аспекту указанное по меньшей мере одно крыло 103 показано в виде поворотного крыла. Согласно одному аспекту транспортное средство 100 вертикальной посадки также может включать в себя одно или более из шасси 104, одной или более створок 105 (которые могут образовывать погрузочные аппарели) и/или узлов 106 крепления внешней подвески. Согласно одному аспекту шасси 104 расположено на нижней части 101U транспортного средства 100 вертикальной посадки; а согласно другим аспектам шасси 104 может быть расположено на любой подходящей части транспортного средства 100 вертикальной посадки любым подходящим способом, так что шасси проходит ниже транспортного средства 100 вертикальной посадки для обеспечения посадки. Согласно одному аспекту узел 106 крепления внешней подвески расположен на нижней части 101U транспортного средства 100 вертикальной посадки; а согласно другим аспектам узел 106 крепления внешней подвески может быть расположен в любой подходящей части транспортного средства 100 вертикальной посадки любым подходящим способом, например возле створки транспортного средства 100 вертикальной посадки. Согласно одному аспекту одна из указанных одной или более створок 105 соединена с корпусом 101, например, в задней части 101А транспортного средства 100 вертикальной посадки. Согласно одному аспекту, как отмечено выше, указанные одна или более створки 105 при развертывании могут образовывать часть погрузочной рампы для посадки и высадки экипажа. Согласно одному аспекту, как будет описано в настоящем документе, указанные одна или более створок 105 могут быть открыты, так что только задняя часть 101А находится в контакте с землей или другой конструкцией (например, зданием, морским судном и т.д.), например во время посадки на вершине, когда передняя часть 101F транспортного средства 100 вертикальной посадки остается в воздухе, так что пассажиры и/или оборудование могут входить/выходить из оболочки 102 через указанные одну или более створки 105 по существу в контакте с землей или другой конструкцией.
[0025] Со ссылкой на ФИГ. 1 и 2, аспекты системы 200 обеспечения осведомленности об обстановке обеспечивают, например, повышенную точность во время выполняемой вручную, полуавтоматической или полностью автоматической эксплуатации транспортного средства 100 вертикальной посадки; уменьшение рабочей нагрузки на экипаж, эксплуатирующий транспортное средство 100 вертикальной посадки; улучшенную буферную зону для посадки/высадки пассажиров во время эксплуатации транспортного средства 100 вертикальной посадки и/или улучшение работы в условиях низкой освещенности или условиях плохой видимости. Как будет описано ниже, система 200 обеспечения осведомленности об обстановке предоставляет информацию 231 обеспечения осведомленности об обстановке, например представлением информации о приближении между транспортным средством вертикальной посадки 100 и местностью, для оператора 110 (например, члена экипажа или автоматизированной системы управления) транспортного средства 100 вертикальной посадки, так что оператор 110 может направлять транспортное средство 100 вертикальной посадки во время, например, посадки, приема/выброса грузов и/или посадки/высадки пассажиров. Например, информацию 231 обеспечения осведомленности об обстановке представляют посредством одного или более из звуковых сигналов, тактильной обратной связи, зрительного представления и/или визуальных символов, а не словесно, например, от члена экипажа, наблюдающего за местностью, с тем чтобы позволить другим членам экипажа (которым в противном случае пришлось бы наблюдать за местностью) выполнять другие задачи, выполнение которых необходимо во время посадки, приема/выброса грузов, посадки/высадки пассажиров и т.д. (т.е. экипажу может быть не нужно, например, наблюдать за местностью).
[0026] Согласно одному аспекту система 200 обеспечения осведомленности об обстановке встроена в транспортное средство 100 вертикальной посадки любым подходящим способом и включает в себя по меньшей мере один датчик 210 приближения, соединенный с корпусом 101 транспортного средства 100 вертикальной посадки. Например, система 200 обеспечения осведомленности об обстановке может быть выполнена за одно целое с системой 220 управления полетом транспортного средства 100 вертикальной посадки, которая включает в себя процессор 225 управления и интерфейс 230 оператора, расположенные, например, внутри оболочки 102 транспортного средства 100 вертикальной посадки, например в кабине экипажа. Согласно одному аспекту процессор 225 управления может быть соединен с указанным по меньшей мере одним датчиком 210 приближения и включать в себя подходящий некратковременный программный код для преобразования данных, принимаемых от указанного по меньшей мере одного датчика 210 приближения, в звуковые сигналы, тактильную обратную связь, зрительное представление и/или визуальные символы, как описано в настоящем документе.
[0027] Со ссылкой на ФИГ. 1 и 3, согласно одному аспекту указанный по меньшей мере один датчик 210 приближения включает в себя одно или более из дальномера 210RS, лидарного, датчика 210LS, акустического датчика 210SS, радиолокационного датчика 210RSS, ультразвукового датчика 210US, формирователя (формирователей) 210VS видеоизображений и/или любого другого подходящего датчика или комбинации датчиков. Согласно одному аспекту указанный по меньшей мере один датчик 210 приближения соединен с корпусом 101 транспортного средства 100 вертикальной посадки в заданных местоположениях по периметру 101Р (или оболочки 102) транспортного средства 100 вертикальной посадки, с тем чтобы обеспечить осведомленность об обстановке/зону покрытия для обнаружения, как будет подробно описано ниже, в заданных местоположениях. Согласно одному аспекту заданные местоположения представляют собой местоположения на транспортном средстве 100 вертикальной посадки, которые могут соприкасаться с препятствием (препятствиями) 300 возле транспортного средства 100 вертикальной посадки во время эксплуатации транспортного средства 100 вертикальной посадки. Например, указанный по меньшей мере один датчик 210 приближения выполняет сканирование на предмет препятствия (препятствий) 300 на заданном расстоянии X от периметра 101Р корпуса 101 транспортного средства 100 вертикальной посадки, возле одного или более заданных местоположений, таких как указанное по меньшей мере одно крыло 103, задняя часть 101А, нижняя часть 101U, передняя часть 101F и/или стороны 101S1, 101S2 транспортного средства 100 вертикальной посадки и обеспечивает осведомленность об обстановке/зону покрытия для обнаружения, с тем чтобы обеспечить уменьшение расстояний между транспортным средством 100 вертикальной посадки и окружающим препятствием (препятствиями) 300 и выбор районов посадки меньшей площади. Согласно одному аспекту одно или более из передней части 101F, задней части 101А, нижней части 101U и боковых сторон 101S1, 101S2 могут включать в себя по меньшей мере один датчик 210 приближения. Согласно одному аспекту одно или более из передней части 101F, задней части 101А, нижней части 101U и боковых сторон 101S1, 101S2 могут включать в себя множество датчиков 210 приближения. Согласно одному аспекту одно или более из передней части 101F, задней части 101А, нижней части 101U и боковых сторон 101S1, 101S2 могут включать в себя любую подходящую комбинацию датчиков 210 приближения (т.е. одна часть может иметь один датчик приближения, в то время как другая часть имеет множество датчиков приближения - одна часть может иметь лазерные /акустические датчики, в то время как другая часть имеет датчики изображения и т.д.).
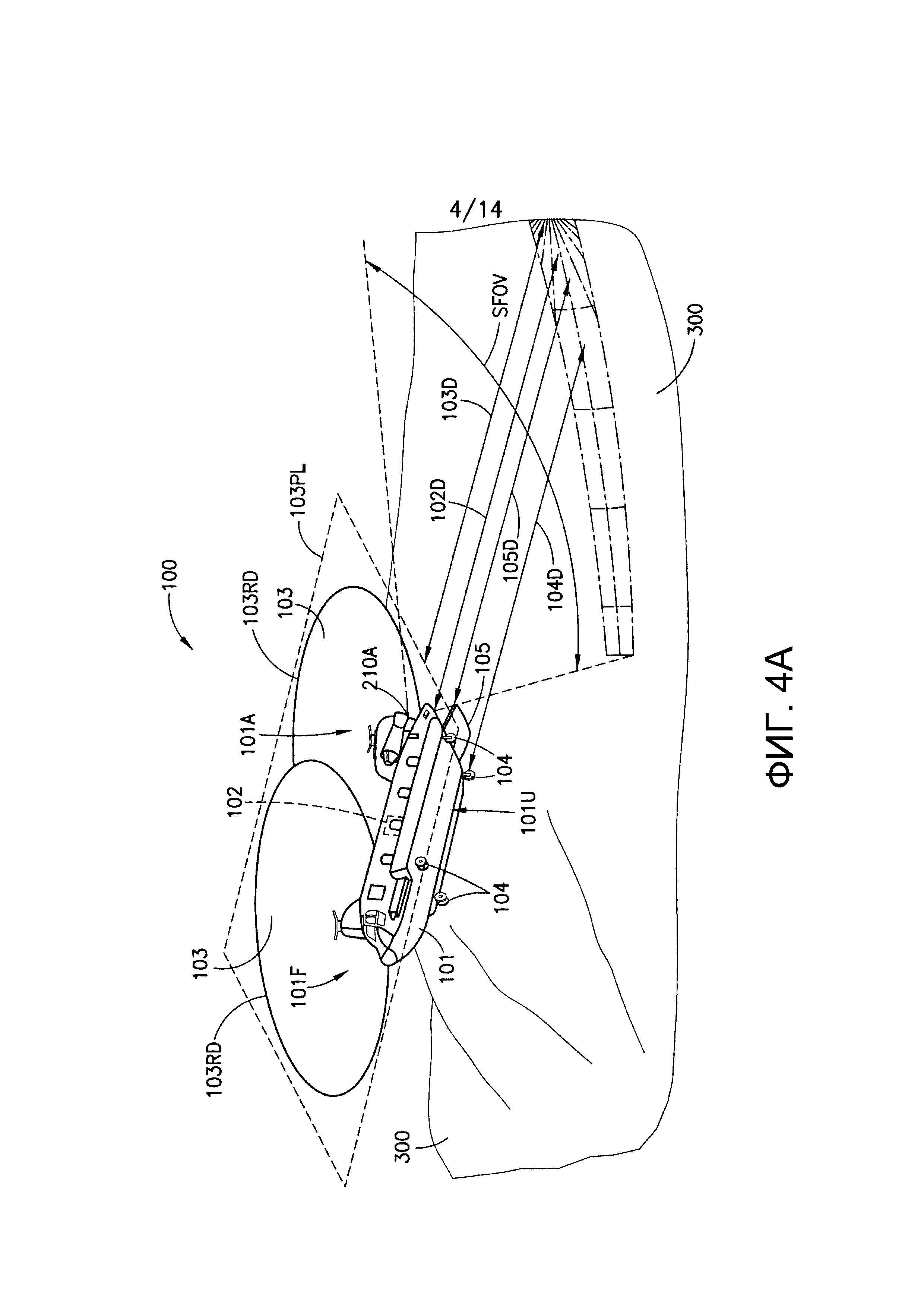
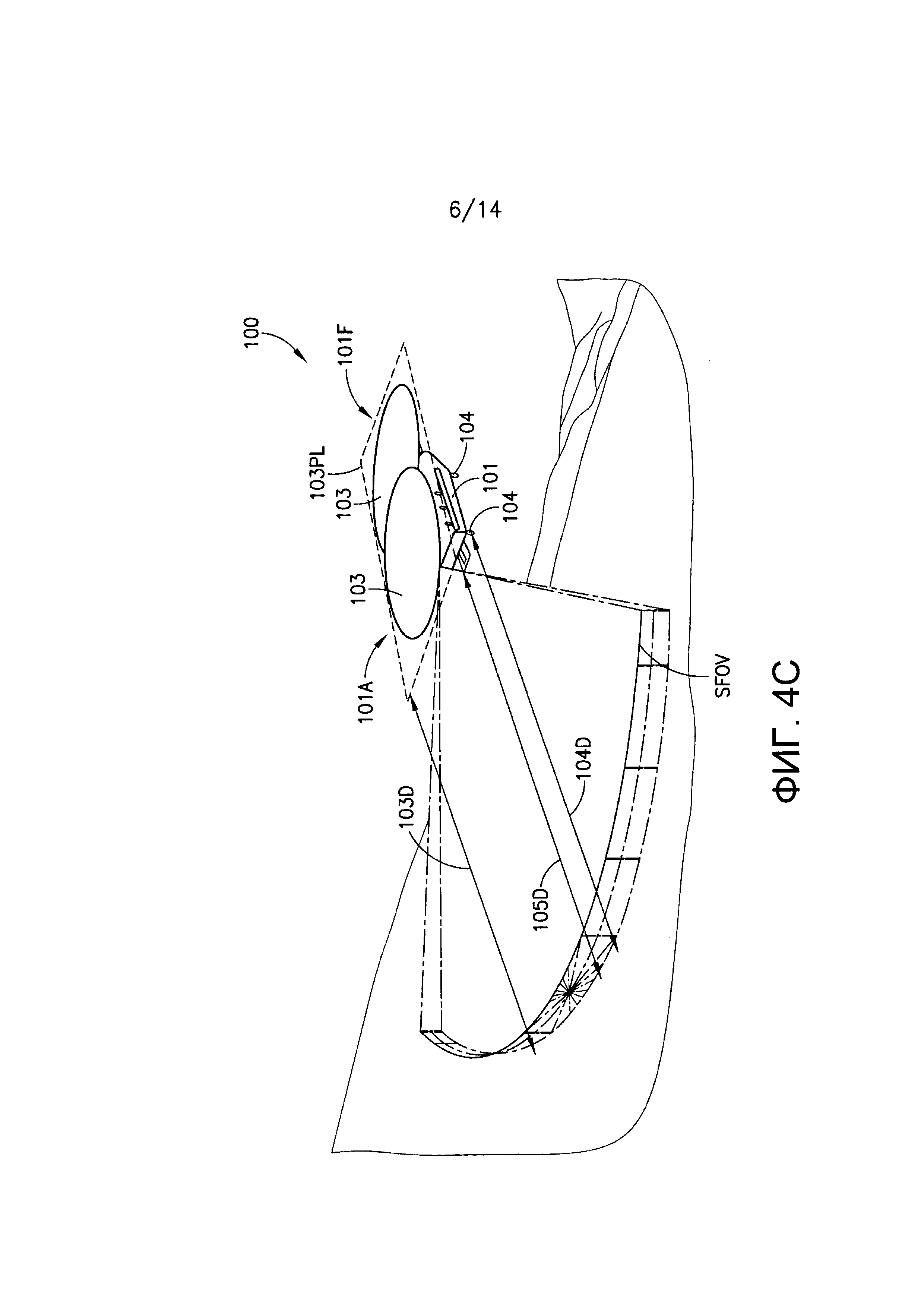
[0028] Согласно одному аспекту и со ссылкой на ФИГ. 1 и 3, по меньшей мере один датчик 210 приближения закреплен и обеспечивает заданное поле SFOV обзора датчика, в котором расположены одно или более из оболочки 102, шасси 104, указанных одной или более створок 105, узлов 106 крепления внешней подвески и/или по меньшей мере одного крыла 103. Например, согласно одному аспекту, как будет описано в настоящем документе в отношении ФИГ. 3 и 4А-4С, по меньшей мере один датчик 210 приближения включает в себя по меньшей мере один обращенный вперед датчик 210F, по меньшей мере один обращенный назад датчик 210А и обращенные в боковом направлении датчики 210L, которые находятся в фиксированных местах на оболочке 102 по существу параллельно указанному по меньшей мере одному крылу 103, так что, например, поверхность 103RD, ометаемая при вращении по меньшей мере одного крыла 103, расположена в поле SFOV обзора каждого из датчиков 210А, 210F, 210L. В этом случае, препятствие 300, обнаруженное в пределах указанного по существу параллельного поля SFOV обзора датчика, обеспечиваемого каждым из датчиков 210А, 210F, 210L, будет представлено оператору 110 транспортного средства 100 вертикальной посадки посредством информации 231 обеспечения осведомленности об обстановке для информирования оператора 110 о том, что препятствие 300 приближается или находится возле указанного по меньшей мере одного крыла 103. Согласно одному аспекту поле SFOV обзора по меньшей мере одного датчика 210 может быть объемным полем обзора, как показано на ФИГ. 4А-4С и 5А-5 В, так что любой наклон ометаемой при вращении поверхности 103RD относительно фиксированного положения указанного по меньшей мере одного датчика на оболочке 102 находится в поле SFOV обзора датчика и так что препятствия обнаруживаются в множестве направлений относительно транспортного средства 100 вертикальной посадки. Согласно одному аспекту указанный по меньшей мере один датчик 210 приближения может быть выполнен в карданном подвесе, и поле SFOV обзора датчика может быть регулируемым. Например, указанный по меньшей мере один датчик 210 приближения может быть выполнен в карданном подвесе в отношении плоскости 103PL (ФИГ. 4А), задаваемой, например, поверхностью 103RD, ометаемой при вращении указанного по меньшей мере одного крыла 103, так что, когда транспортное средство 100 вертикальной посадки изменяет угол тангажа или ометаемая при вращении винта поверхность 103RD наклонена, происходит регулировка по меньшей мере одного датчика 210 приближения для компенсации угла тангажа или наклона.
[0029] Как отмечено выше, согласно одному аспекту со ссылкой на ФИГ. 1 и 3, указанный по меньшей мере один датчик 210 приближения расположен на корпусе 101 транспортного средства 100 вертикальной посадки для обнаружения препятствия (препятствий) 300, таких как, например, местность, неподвижный или движущийся наземный персонал и т.д., так что информация 231 обеспечения осведомленности об обстановке, соответствующая препятствию (препятствиям) 300, может быть предоставлена или иным образом представлена оператору 110 транспортного средства 100 вертикальной посадки для маневрирования транспортного средства 100 вертикальной посадки вокруг препятствия (препятствий) 300, обнаруженного указанным по меньшей мере одним датчиком 210 приближения. Согласно одному аспекту указанный по меньшей мере один датчик 210 приближения регистрирует препятствие (препятствия) 300 по периметру 101Р корпуса 101. Как отмечено выше, согласно одному аспекту поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения перекрывает заданное расстояние X от периметра 101Р корпуса 101. Согласно одному аспекту указанный по меньшей мере один датчик 210 приближения регистрирует препятствие (препятствия) 300 по периметру 103Р (образованному, например, ометаемой при вращении винта поверхностью 103RD) указанного по меньшей мере одного крыла 103. Согласно одному аспекту поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения проходит на заданное расстояние Y наружу от периметра 103Р указанного по меньшей мере одного крыла 103. Заданные расстояния X, Y поля SFOV обзора датчика обеспечивают для оператора 110 осведомленность об обстановке в отношении разделительной дистанции до препятствия (препятствий) 300, позволяя оператору 110 работать, например, в районах посадки меньшей площади и возле препятствия (препятствий) 300. Например, согласно одному аспекту препятствие (препятствия) 300 может быть расположено вне поля FOV обзора или линии видимости оператора 110 транспортного средства 100 вертикальной посадки (т.е. оператору 110 не обязательно нужно иметь четкую линию видимости, чтобы видеть препятствия, и требовать помощи другого члена экипажа для звуковой передачи данных о местоположении и расстояниях до препятствия). В этом случае, указанный по меньшей мере один датчик 210 приближения может обеспечивать для оператора 110 осведомленность об обстановке в отношении любого препятствия (препятствий) 300 в поле SFOV обзора датчика, которое находится вне поля FOV обзора оператора. Согласно одному аспекту препятствие (препятствия) 300 может быть движущимся (например, раскачивающиеся деревья, подвижные транспортные средства и т.д.) таким образом, что расстояния между, например, оболочкой 102 и препятствием (препятствиями) 300 являются динамическими величинами. Согласно этому аспекту обновления в реальном времени от указанного по меньшей мере одного датчика 210 приближения обеспечивают постоянно обновляемое поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения для охвата препятствия (препятствий) 300, перемещающегося внутрь и из поля FOV обзора оператора 110 и/или поля SFOV обзора по меньшей мере одного датчика 210 приближения.
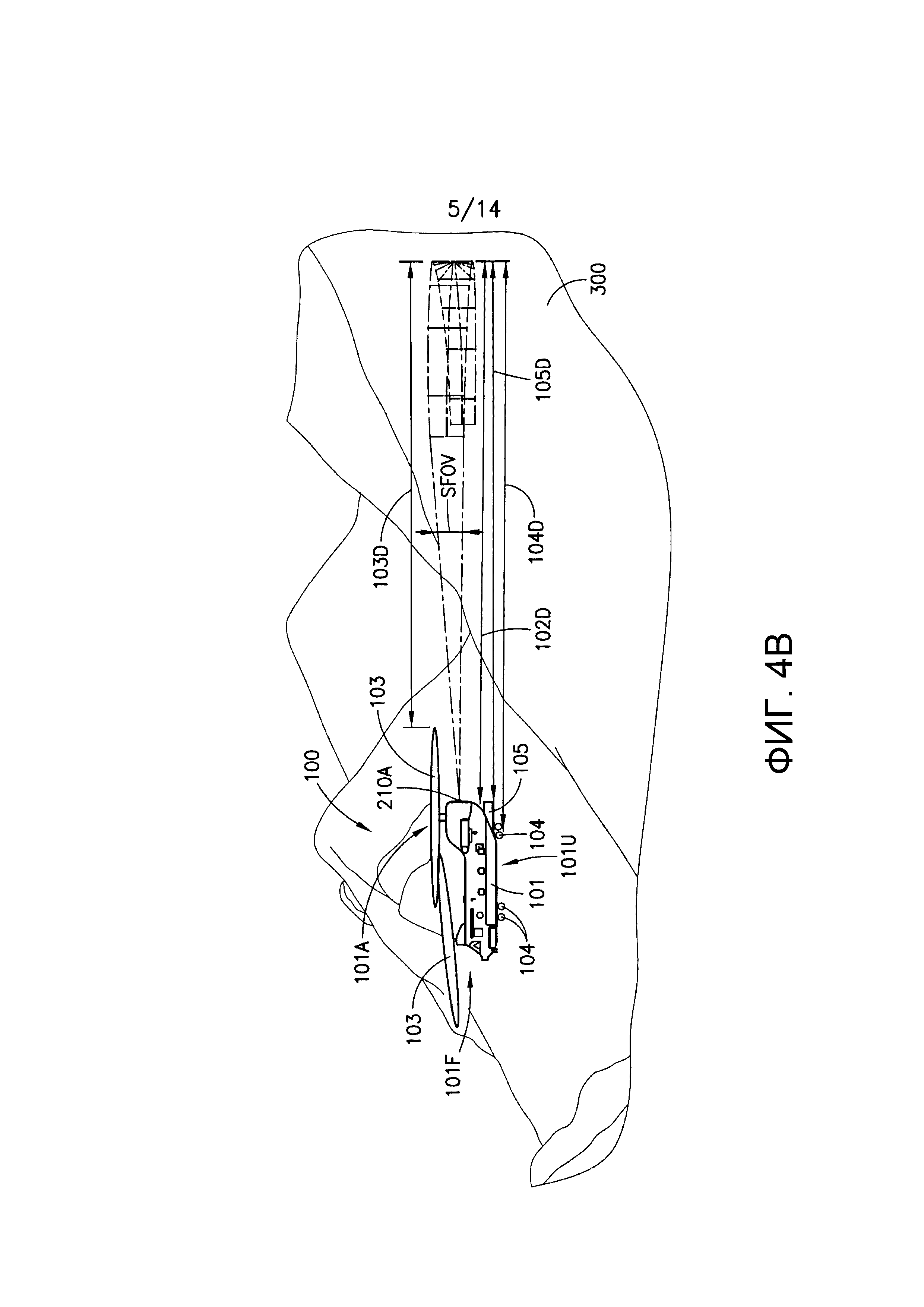
[0030] Со ссылкой на ФИГ. 1-3, согласно одному аспекту, как отмечено выше, указанный по меньшей мере один датчик 210 приближения расположен так, чтобы обнаруживать препятствие (препятствия) 300 в соответствующем поле SFOV обзора каждого датчика 210 приближения. Согласно одному аспекту поле SFOV обзора датчика находится спереди оболочки 102 (т.е. перед передней частью 101F транспортного средства 100 вертикальной посадки - см. датчик 210F (см. ФИГ. 2)). Согласно одному аспекту поле SFOV обзора датчика спереди оболочки 102 может перекрывать или включать в себя поле FOV обзора оператора 110. Согласно одному аспекту поле SFOV обзора датчика находится позади оболочки 102 (т.е. позади задней части 101А транспортного средства 100 вертикальной посадки - см. датчик 210А и поле обзора датчика, показанные на ФИГ. 4А-4С) и предоставляет для оператора 110 информацию 231 обеспечения осведомленности об обстановке в отношении любого препятствия (любых препятствий) 300, расположенного (расположенных) позади транспортного средства 100 вертикальной посадки. Согласно одному аспекту поле SFOV обзора датчика находится снизу оболочки 102 (т.е. ниже нижней части 101U транспортного средства 100 вертикальной посадки, как показано на ФИГ. 2, 5А и 5В, при этом поле SFOV обзора датчика 210 В находится ниже оболочки 102 и может также проецироваться вперед или назад от транспортного средства 100 вертикальной посадки) и предоставляет оператору 110 информацию 231 обеспечения осведомленности об обстановке в отношении какого-либо препятствия (препятствий) 300, расположенного снизу оболочки 102, например, около шасси 104 и/или узла 106 крепления внешней подвески. Согласно одному аспекту поле SFOV обзора датчика находится на одной или более боковых сторонах 101S1, 101S2 оболочки 102 (см. датчики 210L на ФИГ. 2) и предоставляет оператору 110 информацию 231 обеспечения осведомленности об обстановке в отношении какого-либо препятствия (препятствий) 300, расположенного возле боковых сторон 101S1, 101S2. Согласно одному аспекту поле SFOV обзора датчика охватывает одно или более из ранее упомянутых заданных местоположений или любую подходящую комбинацию этих местоположений. Согласно одному аспекту указанные одно или более полей SFOV обзора указанного по меньшей мере одного датчика 210 могут перекрываться друг с другом (см. поле SFOV обзора датчика соответствующих датчиков 210A, 210F, 210L, как показано на ФИГ. 3), с тем чтобы обеспечивать зону покрытия по существу в 360 градусов для обнаружения препятствий / зоны покрытия датчика по периметру 101Р корпуса 101 и/или по периметру 103Р указанного по меньшей мере одного крыла 103 транспортного средства 100 вертикальной посадки.
[0031] Со ссылкой на ФИГ. 1, 2, 4А-4С и 5А-5В, согласно одному аспекту информация 231 обеспечения осведомленности об обстановке, получаемая указанным по меньшей мере одним датчиком 210 приближения показанным, например, в виде радиолокационного или акустического датчика по ФИГ. 4А-4С, и в виде системы регистрации на основе стереокамер по ФИГ. 5А-5В, включает в себя согласно одному аспекту данные DD о расстоянии (см. ФИГ. 1), обозначающие расстояние между одним или более препятствием (препятствиями) 300 и любой подходящей частью транспортного средства 100 вертикальной посадки, такой как плоскость 103PL указанного по меньшей мере одного крыла 103, оболочка 102, шасси 104, узлы 106 крепления внешней подвески и/или указанная по меньшей мере одна створка 105. Например, согласно одному аспекту данные DD о расстоянии обозначают расстояние 103D (см. ФИГ. 4А-4С) между препятствием (препятствиями) 300 и плоскостью 103PL указанного по меньшей мере одного крыла 103. Согласно одному аспекту информация 231 обеспечения осведомленности об обстановке, получаемая указанным по меньшей мере одним датчиком 210 приближения, включает в себя данные DD о расстоянии в поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения, обозначающие расстояние 104D (см. ФИГ. 4А-4С и 5А) между препятствием (препятствиями) 300 и шасси 104 транспортного средства 100 вертикальной посадки (такое поле SFOV обзора обеспечивается датчиком 210 В приближения на нижней части 101U оболочки 102). Согласно одному аспекту информация 231 обеспечения осведомленности об обстановке, получаемая указанным по меньшей мере одним датчиком 210 приближения, включает в себя данные DD о расстоянии в поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения, обозначающие расстояние 102D (см. ФИГ. 4А и 4В) между препятствием (препятствиями) 300 и оболочкой 102 транспортного средства 100 вертикальной посадки. Согласно одному аспекту информация 231 обеспечения осведомленности об обстановке, получаемая указанным по меньшей мере одним датчиком 210 приближения, включает в себя данные DD о расстоянии в поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения, обозначающие расстояние 105D (см. ФИГ. 4А, 4В, 4С и 5А) между препятствием (препятствиями) 300 и указанными одной или более створками 105 транспортного средства 100 вертикальной посадки. Согласно одному аспекту информация 231 обеспечения осведомленности об обстановке, получаемая указанным по меньшей мере одним датчиком 210 приближения (таким как датчик 210 В приближения), включает в себя данные DD о расстоянии в поле SFOV обзора указанного по меньшей мере одного датчика 210 приближения, обозначающие расстояние 106D (см. ФИГ. 5А) между препятствием (препятствиями) 300 и узлами 106 крепления внешней подвески транспортного средства 100 вертикальной посадки. Согласно одному аспекту расстояния 102D, 103D, 104D, 105D, 106D отображаются для оператора 110 транспортного средства 100 вертикальной посадки посредством интерфейса 230 оператора, как будет описано ниже.
[0032] Также со ссылкой на ФИГ. 6А-6С, согласно одному аспекту система 220 управления полетом является системой ручного управления. Согласно одному аспекту система 220 управления полетом является цифровой автоматической системой управления полетом, которая может обеспечивать полуавтоматический или полностью автоматический полет транспортного средства 100 вертикальной посадки. Согласно одному аспекту система 220 управления полетом соединена и сообщается с указанным по меньшей мере одним датчиком 210 приближения. Согласно одному аспекту процессор 225 управления системы 220 управления полетом соединен и сообщается с указанным по меньшей мере одним датчиком 210 приближения таким образом, что процессор 225 управления принимает сигналы 211 приближения (см. ФИГ. 1) от указанного по меньшей мере одного датчика 210 приближения. Согласно одному аспекту информация 231 обеспечения осведомленности об обстановке основана на сигналах 211 приближения (см. ФИГ. 1), вырабатываемых указанным по меньшей мере одним датчиком 210 приближения при обнаружении одного или более препятствий 300. Согласно одному аспекту система 220 управления полетом включает в себя любые подходящие данные 232 о местности, а процессор 225 управления выполнен с возможностью комбинирования данных 232 о местности с сигналами 211 приближения для предоставления оператору 110 транспортного средства 100 вертикальной посадки информации обеспечения осведомленности об обстановке на основании скомбинированных данных, как показано на ФИГ. 6А-6С, на которых данные DD о расстоянии (см. ФИГ. 1), получаемые указанным по меньшей мере одним датчиком 210 приближения, наложены на данные 232 о местности или скомбинированы с ними (см. ФИГ. 1) для предоставления оператору 110 информации, например, в трехмерной перспективе относительно транспортного средства 100 вертикальной посадки, препятствия (препятствий) 300 и местности, на которой расположен (расположены) препятствие (препятствия) 300. Согласно одному аспекту со ссылкой на ФИГ. 1, процессор 225 управления может быть микропроцессором, микроконтроллером, любым подходящим процессором управления полетом транспортного средства 100 вертикальной посадки. Согласно одному аспекту, например, когда система 220 управления полетом является полностью автоматической, процессор 225 управления выполнен с возможностью управления заходом на посадку или зависанием транспортного средства 100 вертикальной посадки в зависимости от информации 231 обеспечения осведомленности об обстановке, принимаемой от указанного по меньшей мере одного датчика 210 приближения, и/или данных 232 о местности.
[0033] Согласно одному аспекту и со ссылкой на ФИГ. 1, 2, 4А-4С, 5А-5В и 6А-6С, процессор 225 управления соединен и сообщается с интерфейсом 230 оператора (см. ФИГ. 1 и 6А-6С). Согласно одному аспекту интерфейс 230 оператора представляет собой визуальный интерфейс 230V, такой как графический пользовательский интерфейс, текстовый пользовательский интерфейс, устройство отображения или любой другой подходящий визуальный интерфейс. Согласно одному аспекту интерфейс 230 оператора представляет собой акустический интерфейс 230А, такой как громкоговорители, пьезозуммеры, сирена или любой другой подходящий акустический интерфейс. Согласно одному аспекту интерфейс 230 оператора представляет собой тактильный интерфейс 230Т, который может включать в себя часть системы управления полетом, такую как, например, показана на ФИГ. 2, ручка CS управления циклическим шагом несущего винта, педали PD управления полетом, или любой другой подходящий тактильный интерфейс, который обеспечивает тактильную обратную связь для оператора, например, посредством вибрации VB или силовой обратной связи FB (например, сопротивления вводу оператором команд управления, которое может быть преодолено оператором). Согласно одному аспекту интерфейс 230 оператора может представлять собой любой подходящий интерфейс или любую подходящую комбинацию визуального, акустического и тактильного интерфейсов 230V, 230А, 230Т, описанных выше.
[0034] Согласно одному аспекту процессор 225 управления и интерфейс 230 оператора расположены в транспортном средстве 100 вертикальной посадки в виде одного блока, например, в приборной панели, электронной приборной панели или индикатора на лобовом стекле. Согласно одному аспекту процессор 225 управления представляет посредством интерфейса 230 оператора, информацию 231 обеспечения осведомленности об обстановке, основанную на сигналах 211 приближения, принимаемых от указанного по меньшей мере одного датчика 210 приближения. Согласно одному аспекту процессор 225 управления представляет информацию 231 обеспечения осведомленности об обстановке посредством интерфейса 230 оператора в виде одного или более из визуальной обратной связи 230VD, тактильной обратной связи 230TD и/или звуковой обратной связи 230AD. Согласно одному аспекту визуальная обратная связь 230VD, тактильная обратная связь 230TD и/или звуковая обратная связь 230AD представляют одно или более из расстояний 102D, 103D, 104D, 105D, 106D между одним или более из оболочки 102, по меньшей мере одного крыла 103, шасси 104, одной или более из створок 105 и узлами 106 крепления внешней подвески и местностью или препятствием (препятствиями) 300 возле транспортного средства 100 вертикальной посадки. Например, как показано на ФИГ. 6А и 6С, процессор 225 управления представляет информацию 231 обеспечения осведомленности об обстановке посредством интерфейса 230 оператора в виде изображения, которое включает в себя, например, поле SFOV обзора датчика (например, от датчиков 210А и/или 210 В, показанных на ФИГ. 4А-4С и 5А-5В), одно или более из оболочки 102, указанного по меньшей мере одного крыла 103 и одну или более створок 105 с наложением 600 карты местности. Согласно одному аспекту, как показано на ФИГ. 6А-6С, изображение также включает в себя один или более показателей 601, 602, 603 дальности, которые обозначают расстояние между одной или более оболочками 102, указанным по меньшей мере одним крылом 103, шасси 104, указанными одной или более створками 105 и/или узлами 106 крепления внешней подвески и, например, местностью или препятствиями 300 возле транспортного средства 100 вертикальной посадки. Согласно одному аспекту наложение 600 карты местности может отображать диапазоны расстояний виде разных цветов, где каждый цвет обозначает приближение между препятствием (препятствиями) 300 и транспортным средством 100 вертикальной посадки. Например, препятствие 300 может быть представлено оператору 110 красным, что указывает на нахождение препятствия 300 в пределах диапазона DS1 расстояний между оболочкой 102 и показателем 601 дальности (т.е. препятствие находится в непосредственной близости к оболочке 102). Препятствие, представленное оператору 110, например желтым, обозначает, что препятствие находится по меньшей мере вне диапазона DS1 расстояний, но в пределах диапазона DS2 расстояний относительно транспортного средства 100 вертикальной посадки (например, объект находится между показателем 601 дальности и показателем 602 дальности). Препятствие 300, представленное оператору 110, например, зеленым, обозначает, что препятствие 300 находится по меньшей мере вне диапазона DS2 расстояний и расположено до края или предела 603 диапазона DS3 расстояний поля SFOV обзора датчика относительно оболочки 102 (например, расположено на расстоянии, которое больше, чем расстояние до показателя 602 дальности).
[0035] Согласно одному аспекту различные звуковые сигналы могут быть связаны с различными диапазонами DS1, DS2, DS3 расстояний в дополнение к визуальной обратной связи 230VD и тактильной обратной связи 230TD или вместо визуальной обратной связи 230VD и тактильной обратной связи 230TD. Например, когда препятствие (препятствия) 300 (которое может включать в себя местность) обнаруживают в пределах диапазона DS3 расстояний, первый звуковой сигнал, имеющий первую характеристику, может быть представлен оператору 110 любым подходящим способом. Согласно одному аспекту первая звуковая характеристика может быть громкостью звукового сигнала, частотой звукового сигнала, высотой звукового сигнала и т.д. Когда препятствие (препятствия) 300 обнаруживают в пределах диапазона DS2 расстояний второй звуковой сигнал, имеющий вторую звуковую характеристику, отличную от первой звуковой характеристики, может быть представлен оператору 110 любым подходящим способом. Например, вторая звуковая характеристика может быть представлена увеличением громкости, увеличением частоты, повышенной высотой и т.д. по сравнению с первым звуковым сигналом. Когда препятствие (препятствия) 300 обнаруживают в пределах диапазона DS1 расстояний, оператору 110 может быть представлен любым подходящим способом третий звуковой сигнал, имеющий третью звуковую характеристику, отличную как от первой звуковой характеристики, так и от второй звуковой характеристики. Например, третья звуковая характеристика может быть представлена увеличением громкости, увеличением частоты, повышенной высотой и т.д. по сравнению как с первым звуковым сигналом, так и со вторым звуковым сигналом.
[0036] Согласно одному аспекту, как лучше всего показано на ФИГ. 6 В и 6С, процессор 225 управления может представлять информацию 231 обеспечения осведомленности об обстановке, полученную от датчика 210 В приближения (см. ФИГ. 2, 5А и 5 В), расположенного на нижней части 101U транспортного средства 100 вертикальной посадки. Согласно одному аспекту датчик 210 В приближения, расположенный на нижней части транспортного средства 100 вертикальной посадки, представляет собой формирователь 210VS видеоизображений (см. ФИГ. 1), такой как система стереокамер, которая обеспечивает выдачу изображения местности/препятствий 300, а также данных DD о расстоянии, соответствующих местности/препятствиям 300. Например, поле SFOV обзора датчика 210 В приближения, изображенное на ФИГ. 5А и 5 В, иллюстрирует поле обзора формирователя 210VS видеоизображений (см. ФИГ. 1) и может быть представлено оператору 110 посредством интерфейса 230 оператора, в виде изображения нижней части 101U (например, показано на ФИГ. 6 В и 6С) транспортного средства 100 вертикальной посадки, при этом изображение включает в себя показатели 601-603 дальности (таким образом, как описано выше). Согласно одному аспекту изображение, представленное оператору 110, может иметь нормальную ориентацию. Согласно одному аспекту изображение, представленное оператору 110, может иметь обратную ориентацию, такое как полученное посредством, например, аппаратных средств обработки видео, как показано на ФИГ. 9. Согласно одному аспекту изображение также включает в себя показатель 604 дальности (см. ФИГ. 6 В), в частности, до препятствия (препятствий) 300 в поле SFOV обзора датчика. Например, согласно одному аспекту показатель 604 дальности может обозначать расстояние между одним или более из шасси 104, оболочки 102 и/или узлов 106 крепления внешней подвески и, например, местностью или препятствием (препятствиями) 300 возле транспортного средства 100 вертикальной посадки. Согласно одному аспекту показатель 604 дальности может представлять собой показатель, неподвижный относительно транспортного средства 100 вертикальной посадки, аналогичный мишени дальномера, при этом оператор 110 может размещать мишень 604Т1, 604Т2 для определения дальности путем маневрирования транспортного средства 100 вертикальной посадки с позиционированием мишени 604Т1, 604Т2 для определения дальности поверх любого необходимого объекта 300 в поле SFOV обзора датчика для определения расстояния до объекта 300 относительно одного или более, например, из шасси 104, оболочки 102 и узла 106 крепления внешней подвески. Согласно одному аспекту показатель дальности может представлять собой выбираемую мишень 604S для определения дальности (т.е., если оператор 110 выбирает препятствие 300, при этом на данном препятствии появляется выбираемый показатель 604S дальности, который представляет расстояние между препятствием и любой подходящей частью транспортного средства 100 вертикальной посадки способом, аналогичным описанному выше). Согласно одному аспекту препятствие (препятствия) 300, которое появляется в поле SFOV обзора датчика, может быть автоматически обнаружено и выбрано системой 200 обеспечения осведомленности об обстановке, при этом показатель 604S дальности представлен на объекте или расположен поверх объекта с показателем расстояния до этого объекта (либо представлением объекта в заданном цвете, как отмечено выше, либо выдачей расстояния до объекта 300 в цифровой форме).
[0037] Также со ссылкой на ФИГ. 1 и 2, согласно одному аспекту процессор 225 управления представляет информацию 231 обеспечения осведомленности об обстановке посредством интерфейса 230 оператора в виде тактильной обратной связи на органе управления полетом транспортного средства 100 вертикальной посадки. Согласно одному аспекту тактильная обратная связь включает в себя одно или более из сопротивления или силовой обратной связи FB операторскому вводу на одном или более органах управления полетом и/или вибрирования/потряхивания VB одного или более органов управления полетом, например, ручки CS управления циклическим шагом несущего винта, педалей PD, устройства отслеживания направления взгляда, трехосные боковые ручки или любые другие подходящие средства управления пилота. Эта тактильная обратная связь может быть представлена вместе с визуальной и/или звуковой обратной связью, как описано выше.
[0038] Со ссылкой на ФИГ. 7 показан способ работы 700 системы 200 обеспечения осведомленности об обстановке. Согласно одному аспекту соединяют по меньшей мере один датчик 210 приближения с корпусом 101 транспортного средства 100 вертикальной посадки (ФИГ. 7, блок 701). Согласно одному аспекту указанный по меньшей мере один датчик 210 приближения соединяют и размещают для получения информации о препятствиях вне поля FOV обзора оператора транспортного средства 100 вертикальной посадки. Согласно одному аспекту, когда оператор 110 транспортного средства 100 вертикальной посадки выполняет выруливание, посадку или иные полетные операции, по меньшей мере один датчик 210 приближения обнаруживает препятствие (препятствия) 300, расположенное в соответствующем поле SFOV обзора датчика (ФИГ. 7, блок 702). Указанный по меньшей мере один датчик 210 приближения отправляет сигналы 211 приближения, относящиеся к препятствию (препятствиям) 300, в процессор 225 управления (ФИГ. 7, блок 703). Согласно одному аспекту процессор 225 управления принимает сигналы 211 приближения от указанного по меньшей мере одного датчика 210 приближения (ФИГ. 7, блок 704). Согласно одному аспекту процессор управления комбинирует данные 232 о местности с сигналами 211 приближения для формирования информации 231 обеспечения осведомленности об обстановке. Согласно одному аспекту процессор 225 управления представляет, посредством интерфейса 230 оператора системы 220 управления полетом, на основании сигналов 211 приближения, информацию 231 обеспечения осведомленности об обстановке о препятствии (препятствиях) 300, находящемся в пределах заданного расстояния 102D, 103D, 104D, 105D, 106D транспортного средства 100 вертикальной посадки относительно одного или более из оболочки 102, указанного по меньшей мере одного крыла 103, шасси 104, указанных одной или более створок 105 и/или узлов 106 крепления внешней подвески (ФИГ. 7, блок 705). Согласно одному аспекту информацию 231 обеспечения осведомленности об обстановке представляют посредством интерфейса 230 оператора в виде одного или более из визуальной обратной связи и/или звуковой обратной связи. Согласно одному аспекту информацию 231 обеспечения осведомленности об обстановке представляют посредством интерфейса 230 оператора в виде изображения части оболочки 102 и/или части указанного по меньшей мере одного крыла 103 с наложением 600 карты местности, включающего показатели 102D расстояния между транспортным средством 100 вертикальной посадки и местностью/препятствием (препятствиями) 300 возле транспортного средства 100 вертикальной посадки. Согласно одному аспекту информацию 231 обеспечения осведомленности об обстановке представляют посредством интерфейса 230 оператора в виде тактильной обратной связи 230TD, визуальной обратной связи 230VD и/или звуковой обратной связи 230AD, как описано выше.
[0039] Примеры раскрытия настоящего изобретения могут быть описаны в контексте способа 1000 изготовления и обслуживания летательного аппарата, как показано на ФИГ. 8. Согласно другим аспектам примеры раскрытия настоящего изобретения могут быть применены к любому другому подходящему транспортному средству, такому как, например, беспилотные летательные аппараты. В отношении изготовления летательных аппаратов, во время подготовки к изготовлению проиллюстрированный способ 1000 может включать в себя разработку спецификации и проектирование (блок 1004) транспортного средства 100 вертикальной посадки и материальное снабжение (блок 1006). Во время производства может иметь место изготовление компонентов и сборочных узлов (блок 1008) и интеграция систем (блок 1010) транспортного средства 100 вертикальной посадки. После этого транспортное средство 100 вертикальной посадки может пройти через стадию сертификации и доставки (блок 1012) для ввода в эксплуатацию (блок 1014). При эксплуатации летательный аппарат 1102 может подвергаться регламентному техобслуживанию и текущему ремонту (блок 1016). Регламентное техобслуживание и текущий ремонт могут включать в себя модернизацию, перенастройку, переоборудование и так далее одной или более систем транспортного средства 100 вертикальной посадки, которые могут включать в себя систему 200 обеспечения осведомленности об обстановке, как описано в настоящем документе.
[0040] Каждый из процессов проиллюстрированного способа 1000 может быть выполнен или осуществлен системным интегратором, третьей стороной и/или оператором (например, заказчиком). В целях настоящего описания системный интегратор может включать в себя, без ограничения, любое количество производителей летательных аппаратов и субподрядчиков по основным системам; третья сторона может включать в себя, без ограничения, любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.д.
[0041] Устройство (устройства) и способ (способы), показанные или описанные в настоящем документе, могут быть использованы во время любых одного или более этапов способа 1000 изготовления и обслуживания. Например, компоненты или сборочные узлы, относящиеся к изготовлению компонентов и сборочных узлов (блок 1008), могут быть изготовлены или произведены аналогично компонентам или сборочным узлам, изготовленным во время эксплуатации летательного аппарата 1102 (блок 1014). Также, один или более примеров устройства (устройств) и способа (способов) или их комбинаций могут быть использованы во время производственных операций 1008 и 1010, например, с существенным ускорением сборки или снижением стоимости транспортного средства 100 вертикальной посадки. Схожим образом, один или более примеров устройств и способов или их комбинаций могут быть использованы, например и без ограничения, во время эксплуатации летательного аппарата 1102 (блок 1014) и/или во время регламентного техобслуживания и ремонта (блок 1016).
Следующее представлено в соответствии с аспектами раскрытия настоящего изобретения:
А1. Транспортное средство вертикальной посадки, содержащее:
корпус, образующий оболочку, и имеющее по меньшей мере одно крыло, соединенное с корпусом;
по меньшей мере один датчик приближения, соединенный с корпусом; и
систему управления полетом, включающую в себя процессор управления и интерфейс оператора, при этом
указанный по меньшей мере один датчик приближения соединен с процессором управления, выполненным с возможностью приема сигналов приближения от указанного по меньшей мере одного датчика приближения и с возможностью представления, посредством интерфейса оператора и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от транспортного средства вертикальной посадки относительно оболочки и указанного по меньшей мере одного крыла.
А2. Транспортное средство вертикальной посадки по параграфу А1, в котором указанное по меньшей мере одно крыло содержит одно или более из неподвижного крыла и поворотного крыла.
A3. Транспортное средство вертикальной посадки по параграфу А1, причем транспортное средство вертикальной посадки содержит одно из летательного аппарата с фиксированным крылом, летательного аппарата с наклонным крылом, летательного аппарата с наклонным несущим винтом и винтокрылого летательного аппарата.
А4. Транспортное средство вертикальной посадки по параграфу А1, в котором указанный по меньшей мере один датчик приближения содержит одно или более из датчика рельефа местности, датчика препятствий, радиолокационного датчика, формирователя видеоизображений и/или акустического датчика.
А5. Транспортное средство вертикальной посадки по параграфу А1, в котором информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и транспортным средством вертикальной посадки.
А6. Транспортное средство вертикальной посадки по параграфу А1, в котором информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и плоскостью, задаваемой поверхностью, ометаемой при вращении указанного по меньшей мере одного крыла.
А7. Транспортное средство вертикальной посадки по параграфу А1, в котором информация обеспечения осведомленности об обстановке включает в себя расстояние между препятствиями и шасси транспортного средства вертикальной посадки.
А8. Транспортное средство вертикальной посадки по параграфу А1, в котором информация обеспечения осведомленности об обстановке включает в себя расстояние между препятствиями и оболочкой транспортного средства вертикальной посадки.
А9. Транспортное средство вертикальной посадки по параграфу А1, в котором указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных спереди оболочки.
А10. Транспортное средство вертикальной посадки по параграфу А1, в котором указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных позади оболочки.
АН. Транспортное средство вертикальной посадки по параграфу А1, в котором указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных снизу оболочки.
А12. Транспортное средство вертикальной посадки по параграфу А1, в котором указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных с одной или более сторон оболочки.
А13. Транспортное средство вертикальной посадки по параграфу А1, в котором указанный по меньшей мере один датчик приближения расположен для получения информации о препятствиях, а именно, где препятствия расположены вне поля обзора оператора транспортного средства вертикальной посадки.
А14. Транспортное средство вертикальной посадки по параграфу А1, в котором процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора, в виде одного или более из визуальной и звуковой обратной связи.
А15. Транспортное средство вертикальной посадки по параграфу А14, в котором указанные одно или более из визуальной и звуковой обратной связи представляют расстояние между по меньшей мере оболочкой и местностью или препятствиями возле транспортного средства вертикальной посадки.
А16. Транспортное средство вертикальной посадки по параграфу А15, в котором указанные одно или более из визуальной и звуковой обратной связи также представляют расстояние между указанным по меньшей мере одним крылом и местностью или препятствиями возле транспортного средства вертикальной посадки.
А17. Транспортное средство вертикальной посадки по параграфу А1, в котором процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде изображения оболочки с наложением карты местности, включающего показатели дальности между по меньшей мере оболочкой и местностью возле транспортным средством вертикальной посадки.
А18. Транспортное средство вертикальной посадки по параграфу А17, в котором показатели дальности также включают в себя показатели расстояния между указанным по меньшей мере одним крылом и местностью.
А19. Транспортное средство вертикальной посадки по параграфу А17, в котором изображение оболочки включает в себя изображение шасси транспортного средства вертикальной посадки.
А20. Транспортное средство вертикальной посадки по параграфу А17, в котором изображение оболочки включает в себя изображение одного или более из створок или аппарелей, соединенных с оболочкой.
А21. Транспортное средство вертикальной посадки по параграфу А17, в котором изображение оболочки включает в себя изображение узлов крепления внешней подвески, соединенных с корпусом.
А22. Транспортное средство вертикальной посадки по параграфу А1, в котором процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде тактильной обратной связи на органе управления полетом транспортного средства вертикальной посадки.
А23. Транспортное средство вертикальной посадки по параграфу А22, в котором тактильная обратная связь включает сопротивление операторскому вводу на одном или более органах управления полетом.
А24. Транспортное средство вертикальной посадки по параграфу А22, в котором тактильная обратная связь содержит вибрирование или потряхивание органа управления полетом.
А25. Транспортное средство вертикальной посадки по параграфу А1, в котором система управления полетом содержит автоматическую систему управления полетом, а процессор управления выполнен с возможностью управления заходом на посадку или зависанием транспортного средства вертикальной посадки в зависимости от сигналов приближения, принимаемых от указанного по меньшей мере одного датчика приближения.
А26. Транспортное средство вертикальной посадки по параграфу А1, в котором система управления полетом включает в себя данные о местности, а процессор управления выполнен с возможностью комбинирования данных о местности с сигналами приближения для формирования информации обеспечения осведомленности об обстановке.
В1. Система обеспечения осведомленности об обстановке для транспортного средства вертикальной посадки, имеющего корпус, образующий оболочку, и имеющего по меньшей мере одно крыло, соединенное с корпусом, содержащая:
по меньшей мере один датчик приближения, соединенный с корпусом и выполненный с возможностью регистрации препятствий по периметру одного или более из оболочки и указанного по меньшей мере одного крыла; и
систему управления полетом, включающую в себя процессор управления и интерфейс оператора, при этом
указанный по меньшей мере один датчик приближения соединен с процессором управления, выполненным с возможностью приема сигналов приближения от указанного по меньшей мере одного датчика приближения и с возможностью представления, посредством интерфейса оператора и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от периметра указанных одного или более из оболочки и указанного по меньшей мере одного крыла.
B2. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанное по меньшей мере одно крыло содержит одно или более из неподвижного крыла и поворотного крыла.
B3. Система обеспечения осведомленности об обстановке по параграфу В1, в которой транспортное средство вертикальной посадки содержит одно из летательного аппарата с фиксированным крылом, летательного аппарата с наклонным крылом, летательного аппарата с наклонным несущим винтом и винтокрылого летательного аппарата.
B4. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанный по меньшей мере один датчик приближения содержит одно или более из датчика рельефа местности, датчика препятствий, радиолокационного датчика, формирователя видеоизображений и акустического датчика.
B5. Система обеспечения осведомленности об обстановке по параграфу В1, в которой информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и транспортным средством вертикальной посадки.
B6. Система обеспечения осведомленности об обстановке по параграфу В1, в которой информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и плоскостью, задаваемой поверхностью, ометаемой при вращении указанного по меньшей мере одного крыла.
B7. Система обеспечения осведомленности об обстановке по параграфу В1, в которой информация обеспечения осведомленности об обстановке включает в себя расстояние между препятствиями и шасси транспортного средства вертикальной посадки.
B8. Система обеспечения осведомленности об обстановке по параграфу В1, в которой информация обеспечения осведомленности об обстановке включает в себя расстояние между препятствиями и оболочкой транспортного средства вертикальной посадки.
В9. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных спереди оболочки.
В10. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных позади оболочки.
В11. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных снизу оболочки.
B12. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанный по меньшей мере один датчик приближения выполнен с возможностью регистрации препятствий, расположенных с одной или более сторон оболочки.
B13. Система обеспечения осведомленности об обстановке по параграфу В1, в которой указанный по меньшей мере один датчик приближения расположен для получения информации о препятствиях, а именно, где препятствия расположены вне поля обзора оператора транспортного средства вертикальной посадки.
B14. Система обеспечения осведомленности об обстановке по параграфу В1, в которой процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора, в виде одного или более из визуальной и звуковой обратной связи.
B15. Система обеспечения осведомленности об обстановке по параграфу В14, в которой указанные одно или более из визуальной и звуковой обратной связи представляют расстояние между по меньшей мере оболочкой и местностью или препятствиями возле транспортного средства вертикальной посадки.
B16. Система обеспечения осведомленности об обстановке по параграфу В15, в которой указанные одно или более из визуальной и звуковой обратной связи также представляют расстояние между указанным по меньшей мере одним крылом и местностью или препятствиями возле транспортного средства вертикальной посадки.
B17. Система обеспечения осведомленности об обстановке по параграфу В1, в которой процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде изображения оболочки с наложением карты местности, включающего показатели дальности между по меньшей мере оболочкой и местностью возле транспортного средства вертикальной посадки.
B18. Система обеспечения осведомленности об обстановке по параграфу В17, в которой показатели дальности также включают в себя показатели расстояния между указанным по меньшей мере одним крылом и местностью.
B19. Система обеспечения осведомленности об обстановке по параграфу В17, в которой изображение оболочки включает в себя изображение шасси транспортного средства вертикальной посадки.
B20. Система обеспечения осведомленности об обстановке по параграфу В17, в которой изображение оболочки включает в себя изображение одного или более из створок или аппарелей, соединенных с оболочкой.
B21. Система обеспечения осведомленности об обстановке по параграфу В17, в которой изображение оболочки включает в себя изображение узлов крепления внешней подвески, соединенных с корпусом.
B22. Система обеспечения осведомленности об обстановке по параграфу В1, в которой процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде тактильной обратной связи на органе управления полетом транспортного средства вертикальной посадки.
B23. Система обеспечения осведомленности об обстановке по параграфу В22, в которой тактильная обратная связь включает сопротивление операторскому вводу на органе управления полетом.
B24. Система обеспечения осведомленности об обстановке по параграфу В22, в которой тактильная обратная связь содержит вибрирование или потряхивание органа управления полетом.
B25. Система обеспечения осведомленности об обстановке по параграфу В1, в которой система управления полетом содержит автоматическую систему управления полетом, а процессор управления выполнен с возможностью управления заходом на посадку или зависанием транспортного средства вертикальной посадки в зависимости от сигналов приближения, принимаемых от указанного по меньшей мере одного датчика приближения.
B26. Система обеспечения осведомленности об обстановке по параграфу В1, в которой система управления полетом включает в себя данные о местности, а процессор управления выполнен с возможностью комбинирования данных о местности с сигналами приближения для формирования информации обеспечения осведомленности об обстановке.
С1. Способ обеспечения осведомленности об обстановке для оператора транспортного средства вертикальной посадки, включающий:
соединение по меньшей мере одного датчика приближения с корпусом транспортного средства вертикальной посадки, при этом корпус образует оболочку, а транспортное средство имеет по меньшей мере одно крыло, соединенное с корпусом;
прием сигналов приближения от указанного по меньшей мере одного датчика приближения процессором управления системы управления полетом транспортного средства вертикальной посадки; и
представление процессором управления, посредством интерфейса оператора системы управления полетом и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от транспортного средства вертикальной посадки относительно оболочки и указанного по меньшей мере одного крыла.
С2. Способ по параграфу С1, согласно которому указанное по меньшей мере одно крыло содержит одно или более из неподвижного крыла и поворотного крыла.
С3. Способ по параграфу С1, согласно которому транспортное средство вертикальной посадки содержит одно из летательного аппарата с фиксированным крылом, летательного аппарата с наклонным крылом, летательного аппарата с наклонным несущим винтом и винтокрылого летательного аппарата.
С4. Способ по параграфу С1, согласно которому указанный по меньшей мере один датчик приближения содержит одно или более из датчика рельефа местности, датчика препятствий, радиолокационного датчика, формирователя видеоизображений и акустического датчика.
С5. Способ по параграфу С1, согласно которому информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и плоскостью, задаваемой поверхностью, ометаемой при вращении указанного по меньшей мере одного крыла.
С6. Способ по параграфу С1, согласно которому информация обеспечения осведомленности об обстановке включает в себя расстояние между препятствиями и шасси транспортного средства вертикальной посадки.
С7. Способ по параграфу С1, согласно которому информация обеспечения осведомленности об обстановке включает в себя расстояние между препятствиями и оболочкой транспортного средства вертикальной посадки.
С8. Способ по параграфу С1, также включающий регистрацию препятствий, расположенных спереди оболочки указанным по меньшей мере одним датчиком приближения.
С9. Способ по параграфу С1, также включающий регистрацию препятствий, расположенных позади оболочки указанным по меньшей мере одним датчиком приближения.
С10. Способ по параграфу С1, также включающий регистрацию препятствий, расположенных снизу оболочки указанным по меньшей мере одним датчиком приближения.
С11. Способ по параграфу С1, также включающий регистрацию препятствий, расположенных с одной или более сторон оболочки, указанным по меньшей мере одним датчиком приближения.
С12. Способ по параграфу С1, согласно которому соединение указанного по меньшей мере одного датчика приближения включает в себя позиционирование указанного по меньшей мере датчика приближения для получения информации о препятствиях, а именно, где препятствия расположены вне поля обзора оператора транспортного средства вертикальной посадки.
С13. Способ по параграфу С1, также включающий представление информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде одного или более из визуальной и звуковой обратной связи.
С14. Способ по параграфу С13, согласно которому указанные одно или более из визуальной и звуковой обратной связи представляют расстояние между по меньшей мере оболочкой и местностью или препятствиями возле транспортного средства вертикальной посадки.
С15. Способ по параграфу С14, согласно которому указанные одно или более из визуальной и звуковой обратной связи также представляют расстояние между указанным по меньшей мере одним крылом и местностью или препятствиями возле транспортного средства вертикальной посадки.
С16. Способ по параграфу С1, также включающий представление информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде изображения оболочки с наложением карты местности, включающего показатели дальности между по меньшей мере оболочкой и местностью возле транспортного средства вертикальной посадки.
С17. Способ по параграфу С16, согласно которому показатели дальности также включают в себя показатели расстояния между указанным по меньшей мере одним крылом и местностью.
С18. Способ по параграфу С16, согласно которому изображение оболочки включает в себя изображение шасси транспортного средства вертикальной посадки.
С19. Способ по параграфу С16, согласно которому изображение оболочки включает в себя изображение одного или более из створок или аппарелей, соединенных с оболочкой.
С20. Способ по параграфу С16, согласно которому изображение оболочки включает в себя изображение узлов крепления внешней подвески, соединенных с корпусом.
С21. Способ по параграфу С1, также включающий представление информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде тактильной обратной связи на органе управления полетом транспортного средства вертикальной посадки.
С22. Способ по параграфу С21, согласно которому тактильная обратная связь включает сопротивление операторскому вводу на одном или более органах управления полетом.
С23. Способ по параграфу С21, согласно которому тактильная обратная связь содержит вибрирование или потряхивание органа управления полетом.
С24. Способ по параграфу С1, согласно которому система управления полетом содержит автоматическую систему управления полетом, а способ также включает управление посредством процессора управления заходом на посадку или зависанием транспортного средства вертикальной посадки в зависимости от сигналов приближения, принимаемых от указанного по меньшей мере одного датчика приближения.
С25. Способ по параграфу С1, также включающий осуществление процессором управления комбинирования данных о местности с сигналами приближения для формирования информации обеспечения осведомленности об обстановке.
На чертежах, упомянутых выше, сплошные линии, при их наличии, соединяющие различные элементы и/или компоненты, могут представлять механические, электрические, осуществляемые по текучей среде, оптические, электромагнитные, беспроводные и другие соединения и/или их комбинации. Используемый в настоящем документе термин "соединенный" означает связанный непосредственно и опосредованно. Например, элемент А может быть непосредственно связан с элементом В или может быть опосредованно связан с ним, например, через другой элемент С. Следует отметить, что не обязательно представлены все отношения между различными раскрытыми элементами. Соответственно, также могут существовать соединения, отличающиеся от изображенных на чертежах. Пунктирные линии, при их наличии, связывающие блоки, обозначающие различные элементы и/или компоненты, представляют соединения, аналогичные по функции и назначению тем, которые представлены сплошными линиями; однако соединения, представленные пунктирными линиями, могут быть либо предусмотрены по выбору, либо могут относиться к альтернативным примерам раскрытия настоящего изобретения. Аналогично, элементы и/или компоненты, при их наличии, представленные пунктирными линиями, показывают альтернативные примеры раскрытия настоящего изобретения. Один или более элементов, показанных сплошными и/или пунктирными линиями, могут быть опущены из конкретного примера без отступления от сущности и объема настоящего изобретения. Элементы окружающей среды, при их наличии, представлены штриховыми линиями. Виртуальные (воображаемые) элементы также могут быть показаны для ясности. Специалистам в данной области техники должно быть понятно, что некоторые из элементов, показанных на чертежах, могут быть скомбинированы различными способами без необходимости включения других элементов, описанных в отношении чертежей, других фигур чертежей и/или сопровождающего раскрытия, даже если такая комбинация или такие комбинации явным образом не показаны в настоящем документе. Аналогичным образом, дополнительные элементы, не ограниченные представленными примерами, могут быть скомбинированы с некоторыми или всеми элементами, показанными и описанными в настоящем документе.
На ФИГ. 1, 7 и 8, упомянутых выше, блоки могут представлять операции и/или их части, и линии, соединяющие различные блоки, не подразумевают какого-либо определенного порядка или зависимости этих операций и/или их частей. Блоки, представленные пунктирными линиями, обозначают альтернативные операции и/или их части. Пунктирные линии, при их наличии, связывающие различные блоки, представляют альтернативные зависимости этих операций и/или их частей. Следует отметить, что не обязательно представлены все зависимости в различных раскрытых операциях. ФИГ. 1, 7 и 8 и сопровождающее раскрытие, описывающее операции способа (способов), изложенного (изложенных) в настоящем документе, не следует толковать как обязательное определение последовательности, в которой операции должны быть выполнены. Напротив, хотя представлен один иллюстративный порядок, следует понимать, что последовательность операций может быть изменена, если это уместно. Соответственно, некоторые операции могут быть выполнены в другом порядке или одновременно. Кроме того, специалистам в данной области техники будет понятно, что не все описанные операции должны быть выполнены.
Кроме того, представленное раскрытие содержит варианты реализации согласно следующим пунктам:
Пункт 1. Транспортное средство вертикальной посадки, содержащее:
корпус, образующий оболочку, и имеющее по меньшей мере одно крыло, соединенное с корпусом;
по меньшей мере один датчик приближения, соединенный с корпусом; и
систему управления полетом, включающую в себя процессор управления и интерфейс оператора, при этом
указанный по меньшей мере один датчик приближения соединен с процессором управления, выполненным с возможностью приема сигналов приближения от указанного по меньшей мере одного датчика приближения и с возможностью представления, посредством интерфейса оператора и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от транспортного средства вертикальной посадки относительно оболочки и указанного по меньшей мере одного крыла.
Пункт 2. Транспортное средство вертикальной посадки по пункту 1, в котором указанное по меньшей мере одно крыло содержит одно или более из неподвижного крыла и поворотного крыла.
Пункт 3. Транспортное средство вертикальной посадки по любому из пунктов 1-2, в котором указанный по меньшей мере один датчик приближения содержит одно или более из датчика рельефа местности, датчика препятствий, радиолокационного датчика, формирователя видеоизображений и акустического датчика.
Пункт 4. Транспортное средство вертикальной посадки по любому из пунктов 1-3, в котором информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и транспортным средством вертикальной посадки.
Пункт 5. Транспортное средство вертикальной посадки по любому из пунктов 1-4, в котором процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде одного или более из визуальной и звуковой обратной связи.
Пункт 6. Транспортное средство вертикальной посадки по пункту 5, в котором указанные одно или более из визуальной и звуковой обратной связи представляют расстояние между по меньшей мере оболочкой и местностью или препятствиями возле транспортного средства вертикальной посадки.
Пункт 7. Транспортное средство вертикальной посадки по любому из пунктов 1-6, в котором процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде тактильной обратной связи на органе управления полетом транспортного средства вертикальной посадки.
Пункт 8. Транспортное средство вертикальной посадки по любому из пунктов 1-7, в котором система управления полетом содержит автоматическую систему управления полетом, а процессор управления выполнен с возможностью управления заходом на посадку или зависанием транспортного средства вертикальной посадки в зависимости от сигналов приближения, принимаемых от указанного по меньшей мере одного датчика приближения.
Пункт 9. Транспортное средство вертикальной посадки по любому из пунктов 1-8, в котором система управления полетом включает в себя данные о местности, а процессор управления выполнен с возможностью комбинирования данных о местности с сигналами приближения для формирования информации обеспечения осведомленности об обстановке.
Пункт 10. Система обеспечения осведомленности об обстановке для транспортного средства вертикальной посадки, имеющего корпус, образующий оболочку, и имеющего по меньшей мере одно крыло, соединенное с корпусом, содержащая:
по меньшей мере один датчик приближения, соединенный с корпусом и выполненный с возможностью регистрации препятствий по периметру одного или более из оболочки и указанного по меньшей мере одного крыла; и
систему управления полетом, включающую в себя процессор управления и интерфейс оператора, при этом
указанный по меньшей мере один датчик приближения соединен с процессором управления, выполненным с возможностью приема сигналов приближения от указанного по меньшей мере одного датчика приближения и с возможностью представления, посредством интерфейса оператора и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от периметра указанных одного или более из оболочки и указанного по меньшей мере одного крыла.
Пункт 11. Система обеспечения осведомленности об обстановке по пункту 10, в которой указанный по меньшей мере один датчик приближения содержит одно или более из датчика рельефа местности, датчика препятствий, радиолокационного датчика, формирователя видеоизображений и акустического датчика.
Пункт 12. Система обеспечения осведомленности об обстановке по любому из пунктов 10-11, в которой информация обеспечения осведомленности об обстановке включает в себя данные о расстоянии, обозначающие расстояние между препятствиями и транспортным средством вертикальной посадки.
Пункт 13. Система обеспечения осведомленности об обстановке по любому из пунктов 10-12, в которой процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде одного или более из визуальной и звуковой обратной связи.
Пункт 14. Система обеспечения осведомленности об обстановке по любому из пунктов 10-13, в которой процессор управления выполнен с возможностью представления информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде тактильной обратной связи на органе управления полетом транспортного средства вертикальной посадки.
Пункт 15. Система обеспечения осведомленности об обстановке по любому из пунктов 10-14, в которой система управления полетом содержит автоматическую систему управления полетом, а процессор управления выполнен с возможностью управления заходом на посадку или зависанием транспортного средства вертикальной посадки в зависимости от сигналов приближения, принимаемых от указанного по меньшей мере одного датчика приближения.
Пункт 16. Способ обеспечения осведомленности об обстановке для оператора транспортного средства вертикальной посадки, включающий:
соединение по меньшей мере одного датчика приближения с корпусом транспортного средства вертикальной посадки, при этом корпус образует оболочку, а транспортное средство имеет по меньшей мере одно крыло, соединенное с корпусом;
прием сигналов приближения от указанного по меньшей мере одного датчика приближения процессором управления системы управления полетом транспортного средства вертикальной посадки; и
представление процессором управления, посредством интерфейса оператора системы управления полетом и на основании сигналов приближения, информации обеспечения осведомленности об обстановке в отношении препятствий в пределах заданного расстояния от транспортного средства вертикальной посадки относительно оболочки и указанного по меньшей мере одного крыла.
Пункт 17. Способ по пункту 16, также включающий представление информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде изображения оболочки с наложением карты местности, включающего показатели дальности между по меньшей мере оболочкой и местностью возле транспортного средства вертикальной посадки.
Пункт 18. Способ по пункту 17, согласно которому изображение оболочки включает в себя изображение одного или более из створок или аппарелей, соединенных с оболочкой.
Пункт 19. Способ по любому из пунктов 16-18, также включающий представление информации обеспечения осведомленности об обстановке посредством интерфейса оператора в виде тактильной обратной связи на органе управления полетом транспортного средства вертикальной посадки.
Пункт 20. Способ по любому из пунктов 16-19, согласно которому система управления полетом содержит автоматическую систему управления полетом, а способ также включает управление посредством процессора управления заходом на посадку или зависанием транспортного средства вертикальной посадки в зависимости от сигналов приближения, принимаемых от указанного по меньшей мере одного датчика приближения.
В последующем описании изложены многочисленные конкретные данные для обеспечения полного понимания раскрытых концепций, которые могут быть осуществлены без некоторых или всех этих частностей. В других случаях данные об известных устройствах и/или процессах опущены, чтобы избежать излишнего усложнения раскрытия настоящего изобретения. Хотя некоторые концепции будут описаны в связи с конкретными примерами, следует отметить, что эти примеры не предназначены для ограничения изобретения.
Если явно не указано иное, выражения "первый", "второй" и т.д. используются в настоящем документе лишь в качестве обозначений и не предназначены для установления порядковых, позиционных или иерархических требований к элементам, к которым относятся эти выражения. Кроме того, ссылка, например, на "второй" элемент не требует или не исключает существование, например, "первого" элемента или элемента с меньшим порядковым номером, и/или, например, "третьего" элемента или элемента с большим порядковым номером.
Ссылка в настоящем документе на "один пример" означает, что один или больше признаков, конструкций или характеристик, описанных в связи с примером или аспектом, включены по меньшей мере в один из вариантов осуществления. Выражение "один пример" в различных местах в описании может являться или не являться ссылкой на один и тот же пример.
При использовании в настоящем документе система, устройство, конструкция, изделие, элемент, компонент или аппаратное средство, "выполненные с возможностью" реализации конкретной функции, действительно выполнены с возможностью реализации конкретной функции без внесения какого-либо изменения, а не просто имеют потенциал для реализации этой конкретной функции после дополнительной модификации. Иными словами, система, устройство, конструкция, изделие, элемент, компонент или аппаратное средство, "выполненные с возможностью" реализации конкретной функции, специально выбраны, созданы, реализованы, использованы, запрограммированы и/или спроектированы в целях реализации указанной конкретной функции. При использовании в настоящем документе "выполненный с возможностью" обозначает существующие характеристики системы, устройства, конструкции, изделия, элемента, компонента или аппаратного средства, которые обеспечивают возможность реализации устройством, конструкцией, изделием, элементом, компонентом или аппаратным средством конкретной функции без дополнительной модификации. Для целей настоящего раскрытия система, устройство, конструкция, изделие, элемент, компонент или аппаратное средство, описанные как "выполненные с возможностью" реализации конкретной функции могут дополнительно или в альтернативных вариантах реализации изобретения быть описаны как "приспособленные для" реализации или "обеспечивающие возможность" реализации указанной функции.
Различные примеры устройства (устройств) и способа (способов), раскрытые в настоящем документе, включают в себя различные компоненты, признаки и функциональные особенности. Следует понимать, что различные примеры устройства (устройств) и способа (способов), раскрытые в настоящем документе, могут включать в себя любые компоненты, признаки и функциональные особенности любых из других примеров устройства (устройств) и способа (способов), раскрытых в настоящем документе, в любой комбинации, и все такие возможности предназначены для включения в пределы сущности и объема настоящего изобретения.
Множество модификаций примеров, изложенных в настоящем документе, окажутся очевидными для специалиста в данной области техники, к которой относится раскрытие настоящего изобретения, при изучении особенностей настоящего изобретения, представленных в вышеприведенном описании и на соответствующих чертежах.
В связи с этим, следует отметить, что настоящее изобретение не ограничено конкретными показанными примерами, и что модификации и другие примеры следует считать включенными в объем прилагаемой формулы изобретения. Кроме того, несмотря на то, что предшествующее описание и соответствующие чертежи описывают примеры раскрытия настоящего изобретения в контексте некоторых приведенных в качестве примеров комбинаций элементов и/или функций, следует понимать, что различные комбинации элементов и/или функций могут быть созданы в альтернативных вариантах реализации без отступления от объема прилагаемой формулы изобретения. Соответственно, ссылочные обозначения, приведенные в скобках в прилагаемой формуле изобретения, представлены только в иллюстративных целях и не предназначены для ограничения объема заявленного изобретения конкретными примерами, приведенными в раскрытии настоящего изобретения.
Реферат
Группа изобретений относится к транспортному средству вертикальной посадки, системе и способу обеспечения осведомленности об обстановке для оператора транспортного средства. Транспортное средство и система обеспечения осведомленности для оператора транспортного средства содержат корпус, образующий оболочку, по меньшей мере одно крыло, датчик приближения, систему управления полетом. Транспортное средство выполнено с возможностью обеспечивать осведомленность в отношении препятствий на заданном расстоянии от транспортного средства и его крыла. Система выполнена с возможностью обеспечивать осведомленность об обстановке в пределах заданного расстояния от периметра оболочки транспортного средства и его крыла. Для обеспечения осведомленности принимают сигналы приближения препятствий от датчика приближения, обеспечивают представление информации о препятствиях посредством процессора системы управления и интерфейса оператора. Обеспечивается повышение точности отображения препятствий в отношении положения транспортного средства вертикальной посадки. 3 н. и 17 з.п. ф-лы, 14 ил.
Комментарии