Радиолокационный способ обнаружения летательных аппаратов - RU2622908C1
Код документа: RU2622908C1
Чертежи

Описание
Изобретение относится к радиолокационному обнаружению летательных аппаратов (ЛА), в частности самолетов, вертолетов как одиночных, так и в составе группы, а также малоразмерных беспилотных летательных аппаратов (МБПЛА), когда величина эффективной площади рассеяния (ЭПР) составляет σц=0,01…0,001 м2.
Известен способ обнаружения ЛА, в том числе и МБПЛА, заключающийся в излучении в пространство с помощью радиолокационной станции (РЛС) импульсных зондирующих сигналов, отражении их от ЛА, приеме отраженных сигналов антенной системой РЛС, фильтрации отраженных сигналов по частоте для выделения отражений от движущихся ЛА на фоне местных предметов, сравнении отфильтрованных отражений с порогом и, в случае превышения установленного порога, принятии решения о том, что обнаружен движущийся ЛА [1].
Данный способ используется в большинстве обзорных РЛС старого и нового парка, однако обладает тем недостатком, что достоверное обнаружение возможно только в случае отражений электромагнитных волн (ЭМВ) от типовых объектов с ЭПР порядка единиц-десятков квадратных метров. В случае же отражения ЭМВ от МБПЛА, ЭПР которых может составлять 0,01…0,001 м2, мощности отраженных сигналов для превышения порога явно недостаточно, и обнаружение таких объектов крайне затруднено.
Известен также способ обнаружения малозаметных ЛА (в том числе и МБПЛА), предполагающий накопление отражений от ЛА, полученных в разных периодах повторения импульсов РЛС [4]. Когерентное накопление (сложение) отраженных сигналов позволяет превысить порог обнаружения даже в случае малой отражающей способности ЛА. Для обеспечения когерентного сложения отраженных импульсных сигналов повышают частоту повторения импульсов Fп или, что то же самое, снижают величину периода повторения импульсов Тп. Данный способ требует, чтобы при заданной скорости обзора пространства минимальное число импульсов Ммин, принимаемых после отражения от ЛА, было достаточным для обнаружения ЛА с заданной вероятностью [4, с. 71-72, 89-90]. Данный способ обнаружения также не позволяет эффективно обнаруживать малозаметные МБПЛА, поскольку отсутствуют методики, позволяющие определить необходимое число накапливаемых импульсов Ммин, а при увеличении Fп возникает неоднозначность определения дальности до обнаруживаемого объекта.
В современных обзорных РЛС число накапливаемых импульсов не превышает 10-100, что явно недостаточно для обнаружения малоотражающих МБПЛА.
Известными являются также способы обнаружения, использующие наряду с рэлеевской и квазиоптической областью рассеяния резонансную область, в которой ЭПР существенно возрастает [5, с. 15-30].
На этом эффекте основан еще один известный способ обнаружения ЛА, имеющих малую отражающую способность. В соответствии с принципами работы устройств, описанных в [6, с. 74-82], а также с использованием традиционных методов корреляционно-фильтровой обработки [1-3] известный способ обнаружения ЛА, включая малоотражающие МБПЛА, заключается в следующем. Посредством перестройки частоты зондирующего сигнала в достаточно широком диапазоне от 150 МГц (λ=2 м) до 6 ГГц (λ=5 см) с дискретностью 10 МГц генерируют высокочастотные электромагнитные колебания на всех частотах и после согласованной обработки принятых отраженных сигналов определяют резонансную частоту ƒp, соответствующую длине волны λp, соизмеримой с размером типового малозаметного ЛА. Сравнивают спектральные отклики отраженных сигналов с пороговым значением и в случае превышения спектральным откликом порога фиксируют частоту ƒp, равной несущей частоте пачки, по отражениям которой получено разовое превышение порогового значения. По превышению трех последовательно принятых пачек отраженных на резонансной частоте радиоимпульсов принимается решение об обнаружении на соответствующей дальности малозаметного ЛА.
Описанный способ обнаружения МБПЛА эффективнее указанных ранее, так как обеспечивает анализ всего диапазона частот, на которых современные МБПЛА отражают ЭМВ в резонансной области, а также исключает принятие случайных, неподтвержденных решений об обнаружении МБПЛА. Однако и этот способ обладает определенными недостатками. Во-первых, перестройка несущей частоты зондирующего сигнала в столь широких пределах (от 150 МГц до 6 ГГц), т.е. четыре декады при использовании направленного приема, потребует создание весьма сложной и дорогостоящей антенно-фидерной системы. Во-вторых, формирование зондирующего сигнала, процесс согласованного приема и обработки принятых отраженных сигналов потребует достаточно большого времени обзора пространства.
Известен также способ радиолокационного обнаружения и классификации ЛА (в частности, вертолетов), основанный на анализе отражений зондирующего сигнала от лопастей несущего винта, использовании признаков пропеллерной модуляции, содержащихся в спектре принятого отраженного сигнала, и описанный в патенте РФ №2293350 от 10.02.2007 г. [8]. Известный способ предполагает обработку отраженных сигналов посредством быстрого преобразования Фурье (БПФ), определения периода амплитудной модуляции сигнала, который соответствует сигналам, отраженным от вращающихся лопастей несущего винта вертолета (далее ЛА), дальнейшего сравнения полученного значения периода амплитудной модуляции сигнала с данными базы и определения на основе этого скорости и модели ЛА.
Недостатком известного способа является невозможность однозначного распознавания МБПЛА, поскольку при облучении вращающегося винта зондирующим радиосигналом с круговой поляризацией амплитудной модуляции отраженного сигнала вообще не происходит, а при линейной (вертикальной или горизонтальной) поляризации зондирующего радиосигнала нет однозначного ответа по распознаванию ЛА из-за многократного отражения от несущих и рулевых винтов.
Задачей изобретения является обеспечение возможности обнаружения МБПЛА с малой величиной ЭПР в пределах 0,0…0,001 м2 на фоне интенсивных отражений от подстилающей поверхности. Сущность предлагаемого технического решения основана на анализе структуры отраженного зондирующего сигнала от лопастей вращающегося винта беспилотного летательного аппарата.
Поставленная задача решается тем, что в радиолокационном способе обнаружения летательных аппаратов, включающем излучение зондирующих радиосигналов, прием и осуществление быстрого преобразования Фурье отраженных радиосигналов, определение пиков и периода амплитудной модуляции в доплеровском спектре отраженного сигнала и запоминании его, согласно изобретению зондирующие радиосигналы излучают попеременно с линейной поляризацией и с квадратурной поляризацией, при этом каждый зондирующий радиосигнал с квадратурной поляризацией синхронен по фазе с предыдущим зондирующим радиосигналом с линейной поляризацией, сравнивают спектры демодулированных отраженных радиосигналов с линейной поляризацией и отраженных радиосигналов с квадратурной поляризацией и по наличию кратности значений периодов их амплитудной модуляции судят об обнаружении летательного аппарата.
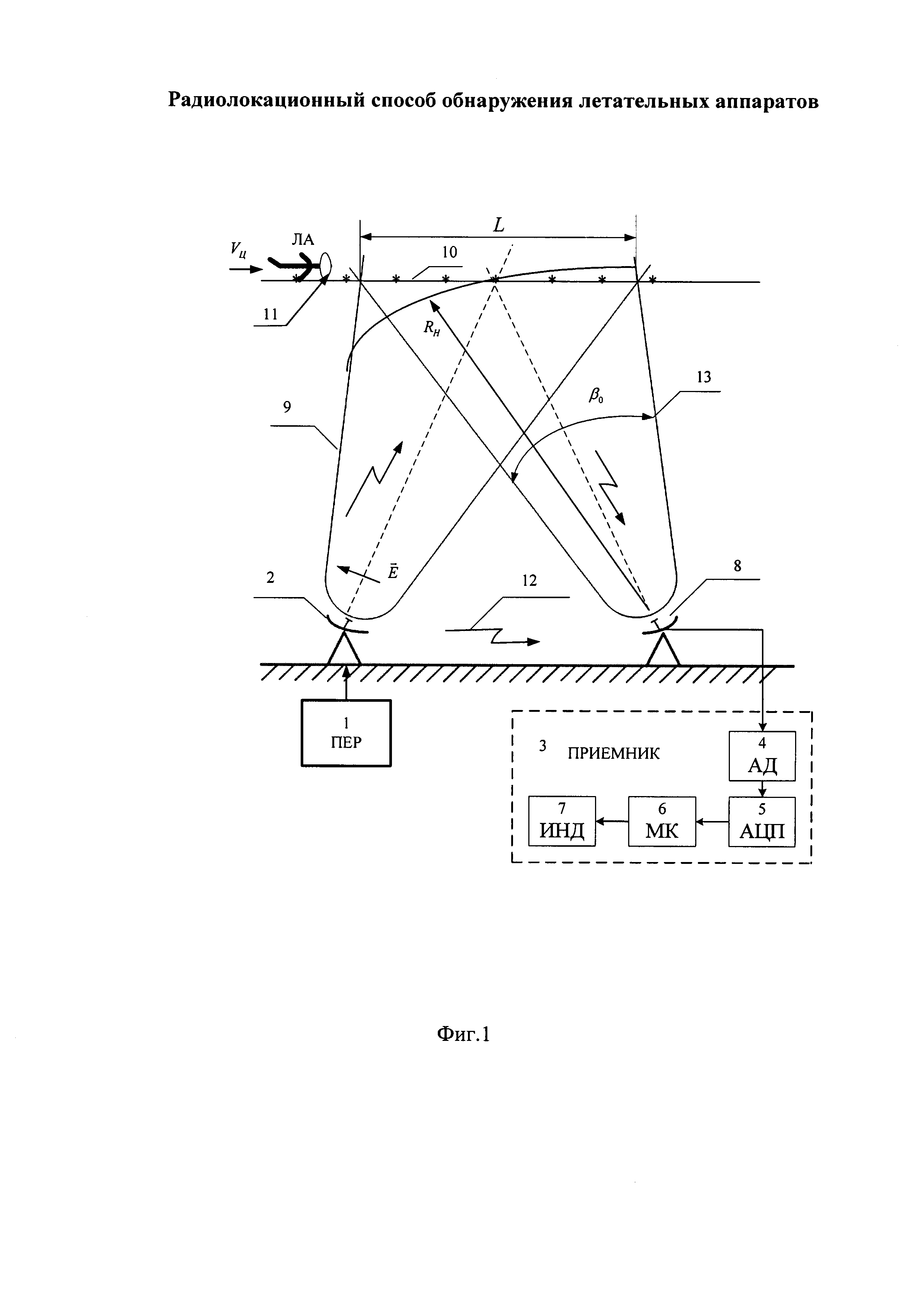
На фиг. 1 схематично представлено устройство для реализации заявляемого радиолокационного способа обнаружения летательных аппаратов. На фиг. 2 представлены экспериментальные спектральные диаграммы отраженных сигналов на индикаторе после Фурье-анализа, выполненного микроконтроллером для различных угловых положений плоскости винта облучаемой модели МБПЛА.
Устройство для реализации заявляемого способа (фиг. 1) включает передатчик (ПЕР) 1 РЛС, соединенный с передающей антенной 2, и приемник 3. Приемник 3 содержит последовательно соединенные амплитудный детектор 4 (АД), аналого-цифровой преобразователь 5 (АЦП), микроконтроллер 6 (МК) и индикатор 7 (ИНД). При этом вход АД 4 является входом приемника 3 и соединен с приемной антенной 8. Передающая антенна 2 формирует диаграмму излучения 9 в направлении траектории полета 10 летательного аппарата с вращающимся винтом 11.
Способ осуществляют следующим образом. Сформированные передатчиком 1 РЛС высокочастотные зондирующие сигналы излучаются передающей антенной 2 в направлении траектории полета 10 летательного аппарата, движущегося с определенной скоростью Vц. Одновременно высокочастотный зондирующий сигнал поступает на приемную антенну 8 (сигнал прямого прохождения 12), где в дальнейшем замешивается с отраженным сигналом на амплитудном детекторе 4. Радиосигналы, отраженные от ЛА и промодулированные по амплитуде за счет вращения его винта 11, принимаются приемной антенной 8 в пределах ее диаграммы направленности 13 и поступают на вход амплитудного детектора 4 приемника 3. Далее через аналого-цифровой преобразователь 5 поступают на устройство цифровой обработки - микроконтроллер 6, выход которого подключен к индикатору 7.
Принцип выделения частоты биений отраженного сигнала от вращения винта 11 ЛА заключается в следующем.
Последовательность отраженных от вращающегося винта ЛА радиосигналов можно записать в следующем виде:


Fj - частота вращения винта, Гц;
S - огибающая последовательности отраженных сигналов;
ti - время задержки, с;
Т - период следования зондирующих радиосигналов, с;
N - количество отраженных радиосигналов, поступивших на вход приемника 3 за время нахождения ЛА в пределах ширины диаграммы направленности 13 приемной антенны 8.
В микроконтроллере 6 происходит спектральный анализ продетектированых отраженных радиосигналов в полосе частот вращения винта 11 (порядка 20…1000 Гц - в зависимости от скорости вращения винта), результат которого отображается на индикаторе 7. Одновременно результат спектрального анализа в виде набора нормированных амплитуд
Класс ЛА определяется совокупностью измеряемых параметров отраженного сигнала, в частности для линейной модели распознавания

α1, α2, …, αi - весовые коэффициенты, подбираемые в процессе обучения нейро-ПЭВМ,



j - номер класса ЛА.
В качестве параметров (признаков) ЛА будут использованы:
- частота вращения винта по четырем координатным осям, 0°, 45°, 90°, Z (зенит);
- амплитуда спектральных составляющих;
- эффективная площадь рассеяния ЛА;
- скорость движения ЛА,
всего около 12 признаков, что позволяет формировать образ (класс) ЛА.
С целью проверки принципиальной возможности осуществления заявляемого способа обнаружения ЛА были проведены лабораторные испытания обнаружения малоразмерных беспилотных летательных аппаратов (МБПЛА) по модуляции отраженного сигнала частотой вращения винта в радиолаборатории «Иридий» Военно-инженерного института ФГАОУ ВО Сибирского федерального университета.
Цель испытаний: определение принципиальной возможности радиолокационного обнаружения МБПЛА массой 1÷10 кг путем выделения из отраженного сигнала частоты вращения винта.
Используемое оборудование.
1. Модель ЛА - аналог-МБПЛА: WINDS 50Е (Sebastiano Silvestri) со следующими характеристиками:
Длина фюзеляжа - 1600 мм;
Размах крыльев - 1580 мм;
Мощность двигателя - 1500 Вт;
Питание аккумуляторное - LiPo, 22,2 В, (6S), С=4500 мА/час;
Скорость вращения винта n - 50÷100 об/сек.
2. Экспериментальный радиолокатор автодинного типа с мощностью передатчика - 5 мВт, рабочей частотой - 2,4 ГГц, поляризацией сигнала линейной горизонтальной, антенной зеркальной (сплошной) диаметром 0,8 м (коэффициент усиления антенны по мощности Ga=25 дБ).
3. Средство измерения: внешний модуль АЦП/ЦАП Е-154 для шины USB: разрядность - 12 бит; частота дискретизации - 10 кГц; диапазон измерений входного сигнала -1.6÷1.6 В.
4. Программное обеспечение: цифровой анализатор спектра на базе персонального компьютера (ноутбук).
Модель МБПЛА устанавливалась в закрытом помещении длиной 40 м с поперечным сечением 3×3 м. Зеркало радиолокатора размещалось на треноге, на высоте 1 м от пола. Расстояние между моделью МБПЛА и радиолокатором составило 30 м.
С выхода детектора РЛС отраженные видеосигналы длиной реализации 3 сек подавались на персональный компьютер с программой спектрального анализа.
Плоскость вращения винта 11 ЛА устанавливалась относительно оси диаграммы излучения под углом θ: 0°, 45°, 90°.
Исследовались винты двух типов: из диэлектрика (длина 406 мм) и углепластика (длина 559 мм).
Результаты измерений представлены в виде соответствующих спектрограмм и показаны на фиг. 2. Анализ результатов показывает, что РЛС регистрирует сигналы частоты вращения обоих видов винтов при соотношении сигнал/шум 30÷35 дБ.
Для углового положения МБПЛА в 0° отмечаются 1-я и 2-я гармоники частоты, соответствующей удвоенной скорости вращения винта, что логично с учетом линейной поляризации излучаемой E-волны, т.к. за один оборот вращения винта его положение дважды совпадает с линией поляризации Е-волны.
При угловом положении МБПЛА в 45° относительно фронта падающей волны на спектрограмме появляется несколько дополнительных линий спектра.
При смене материала винта с диэлектрика на углепластик возрастает амплитуда регистрируемого сигнала примерно на 10 дБ.
Таким образом, в процессе проведенных экспериментальных исследований была доказана возможность обнаружения МБПЛА по частотам вращения его винта независимо от результирующей эффективной площади рассеяния (ЭПР) корпуса МБПЛА. Подобный подход возможен и для других винтокрылых ЛА.
Важным преимуществом заявляемого способа является возможность существенного улучшения качества обнаружения МБПЛА за счет последовательного использования вначале линейной, затем квадратурной поляризации зондирующих радиосигналов с одинаковой фазой по ортогональным компонентам излучения.
Использование синхронно квадратурной поляризации зондирующих радиосигналов позволяет существенно улучшить задачу распознавания объектов класса МБПЛА за счет введения второго проверочного признака - увеличение частоты модуляции отраженного радиосигнала вращением винта в кратное число раз. Другими словами, появление в спектре отраженного радиосигнала кратной составляющей частоты по отношению к первому виду поляризации (линейной) прямо указывает на признак вращения несущего винта МБПЛА.
Еще одним несомненным достоинством предлагаемого способа является возможность существенного улучшения угловой разрешающей способности за счет использования современного способа обратного синтеза апертуры по движущемуся ЛА на конечном участке полета L (см. фиг. 1).
Формирование синтезированной апертуры происходит в данном случае за счет облета ЛА с радиусом разворота Rн при постоянной линейной скорости его перемещения на участке L. При этом обеспечивается наблюдение ЛА последовательно во времени (см. фиг. 1) под различными ракурсами в пределах углового размера β0. При неподвижной РЛС угловой размер синтезированной апертуры β0 определяется скоростью перемещения цели Vц и временем синтезирования Тс, т.е. β0=VцTс/Rн. При этом угловое разрешение по цели за время накопления сигнала Тс составит [7]

Так, если предположить, что на удалении 1000 м от РЛС МБПЛА движется со скоростью Vц=100 км/час (≈28 м/с), то на участке L длиной в 100 м время синтезирования Тс≈3,5 с. За такое время скорость вращения винта n [об/мин] можно считать постоянной (n=const). При этом угловое разрешение согласно выражению (3) при длине волны λ=12,5 см (ƒ=2,4 ГГц) составит

Таким образом, при когерентном суммировании сигналов модуляции частоты вращения винта (даже при достаточно широкой диаграмме направленности антенны РЛС порядка 3…6°) способ позволит получить высокое угловое разрешение.
Источники информации
1. Справочник по радиолокации./Под ред. М.И. Сколника. - Пер. с англ. М.: Сов. радио, 1967. Т.1. Основы радиолокации. - 456 с.
2. Теоретические основы радиолокации./Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. - 560 с.
3. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Ч.1. Основы радиолокации. М.: Воениздат, 1983. - 456 с.
4. Справочник по основам радиолокационной техники./Под ред. В.В. Дружинина. М.: Воениздат, 1967. - 768 с.
5. Радиолокационные характеристики летательных аппаратов./Под ред. Л.Т. Тучкова. М.: Радио и связь, 1985. - 236 с.
6. Патент РФ №2534217 от 27.11.2014. Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов.
7. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли./Под ред. Г.С. Кондратенкова. - М.: «Радиотехника», 2005. - 368 с.
8. Патент РФ №2293350, опубл. 10.02.2007 г. Устройство для обнаружения и классификации летящих и зависших вертолетов (прототип).
Реферат
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях, осуществляющих мониторинг воздушной обстановки. Техническим результатом является возможность обнаружения малозаметных летательных аппаратов, в частности малоразмерных беспилотных летательных аппаратов (МБПЛА), когда величина эффективной площади рассеяния (ЭПР) составляет σ=0,01…0,001 м. Указанный результат достигается тем, что в предлагаемом радиолокационном способе обнаружения летательных аппаратов зондирующие радиосигналы излучают попеременно с линейной поляризацией и с квадратурной поляризацией, а каждый излученный зондирующий радиосигнал с квадратурной поляризацией синхронен по фазе с предыдущим зондирующим радиосигналом с линейной поляризацией. После сравнения спектров демодулированных отраженных радиосигналов с линейной поляризацией и отраженных радиосигналов с квадратурной поляризацией судят об обнаружении летательного аппарата по наличию кратности значений периодов их амплитудной модуляции. 2 ил.
Комментарии