Способ оценки расстояния между транспортными средствами и устройство оценки расстояния между транспортными средствами - RU2693015C1
Код документа: RU2693015C1
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу оценки расстояния между транспортными средствами и к устройству оценки расстояния между транспортными средствами для оценки расстояния между транспортными средствами.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный документ 1 раскрывает устройство отслеживания целей, которое, в случае если цель отслеживания загорожена посредством множества загораживающих объектов, задает в качестве объекта, который должен отслеживаться, один из загораживающих объектов с наибольшей оцененной длительностью загораживания, вычисленной на основе разности между вектором движения загораживаемого объекта и вектором движения цели отслеживания.
Библиографический список
Патентные документы
[0003] Патентный документ 1. Публикация японской заявки на патент номер 2012-80221
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] Тем не менее, в технологии, описанной в патентном документе 1, скорость цели отслеживания в момент, когда цель отслеживания загорожена, используется в качестве ее скорости. По этой причине, в случае использования технологии, описанной в патентном документе 1, для того, чтобы оценивать расстояния между транспортными средствами в линии транспортных средств, включающих в себя цель отслеживания, изменение скорости цели отслеживания может уменьшать точность оценки расстояния между транспортными средствами.
[0005] С учетом вышеизложенной проблемы цель настоящего изобретения заключается в том, чтобы предоставлять способ оценки расстояния между транспортными средствами и устройство оценки расстояния между транспортными средствами, которые позволяют повышать точность оценки расстояния между транспортными средствами.
Решение задачи
[0006] Способ оценки расстояния между транспортными средствами согласно одному аспекту настоящего изобретения включает в себя: оценку загороженной области, загороженной помехой от датчика, и двух незагороженных областей, размещающих между собой загороженную область; и на основе скоростей двух отслеживаемых транспортных средств, движущихся в идентичной полосе движения, соответственно, в двух незагороженных областях, оценку расстояния между транспортными средствами от двух отслеживаемых транспортных средств до отслеживаемого транспортного средства, движущегося в идентичной полосе движения в загороженной области.
Преимущества изобретения
[0007] Согласно одному аспекту настоящего изобретения, можно предоставлять способ оценки расстояния между транспортными средствами и устройство оценки расстояния между транспортными средствами, которые позволяют повышать точность оценки расстояния между транспортными средствами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
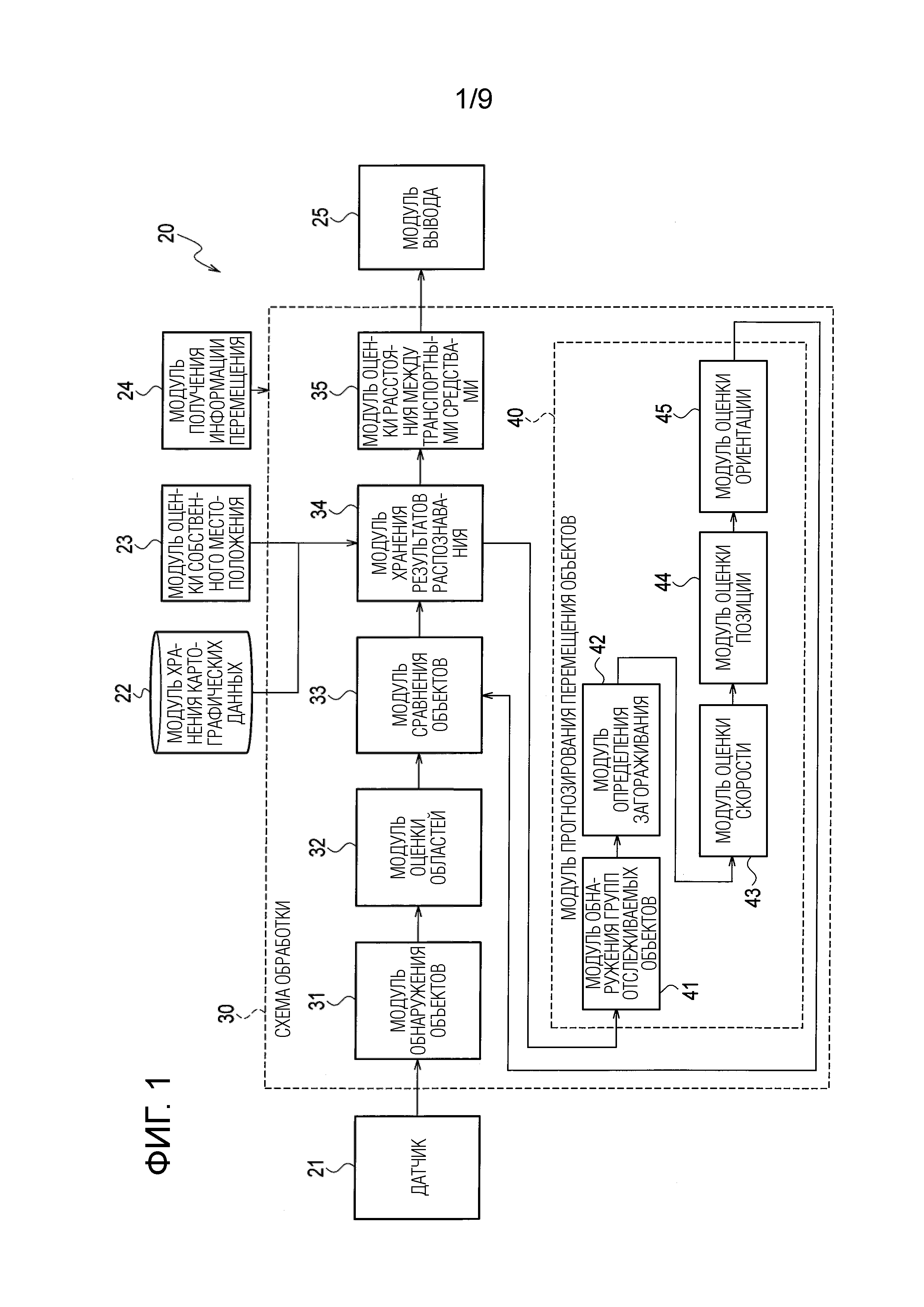
[0008] Фиг. 1 является принципиальной блок-схемой, поясняющей базовую конфигурацию устройства оценки расстояния между транспортными средствами согласно варианту осуществления настоящего изобретения.
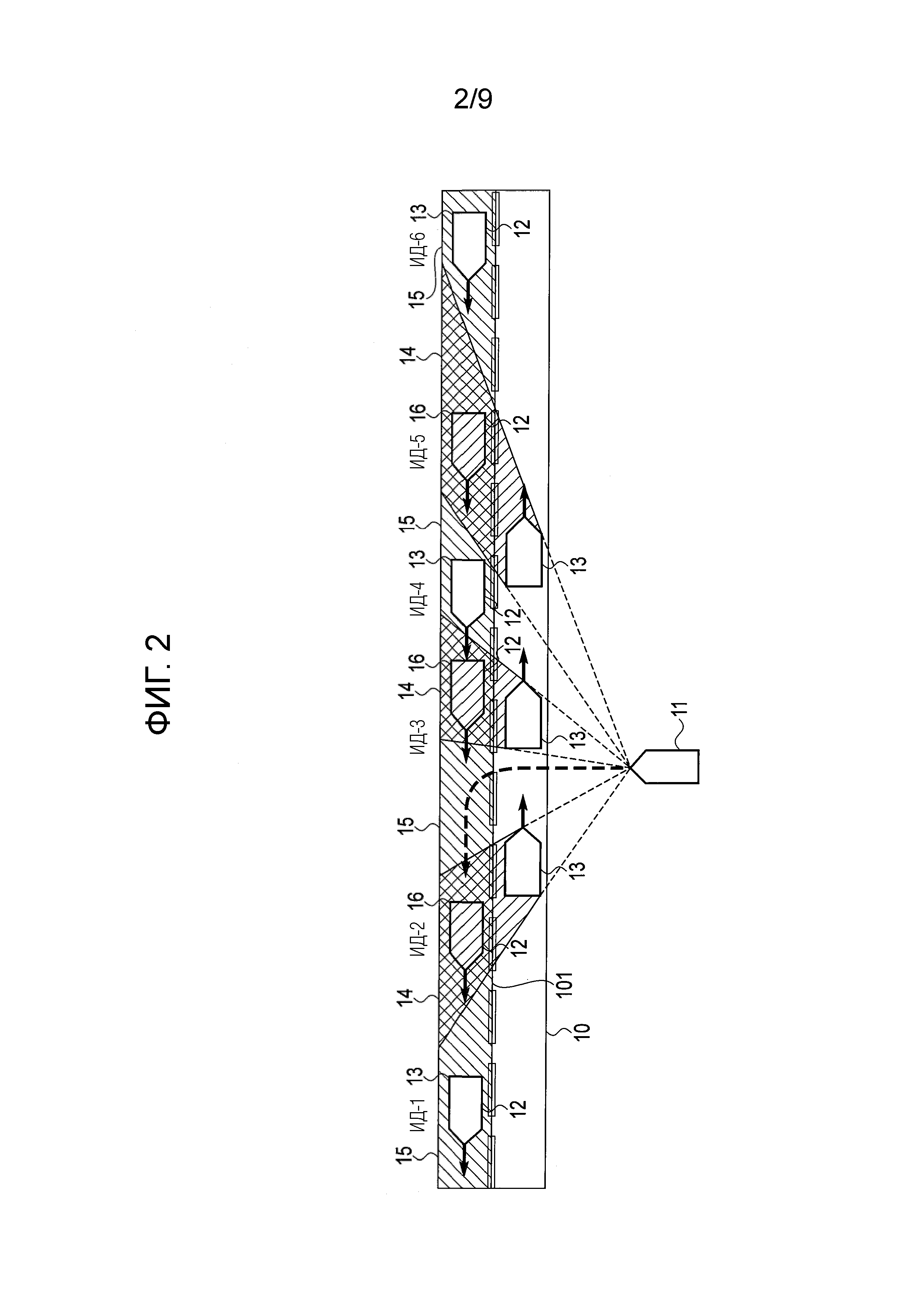
Фиг. 2 является схемой, поясняющей ситуацию, когда транспортное средство, на котором монтируется устройство оценки расстояния между транспортными средствами согласно варианту осуществления настоящего изобретения, собирается въезжать в поток в полосе движения на дальней стороне.
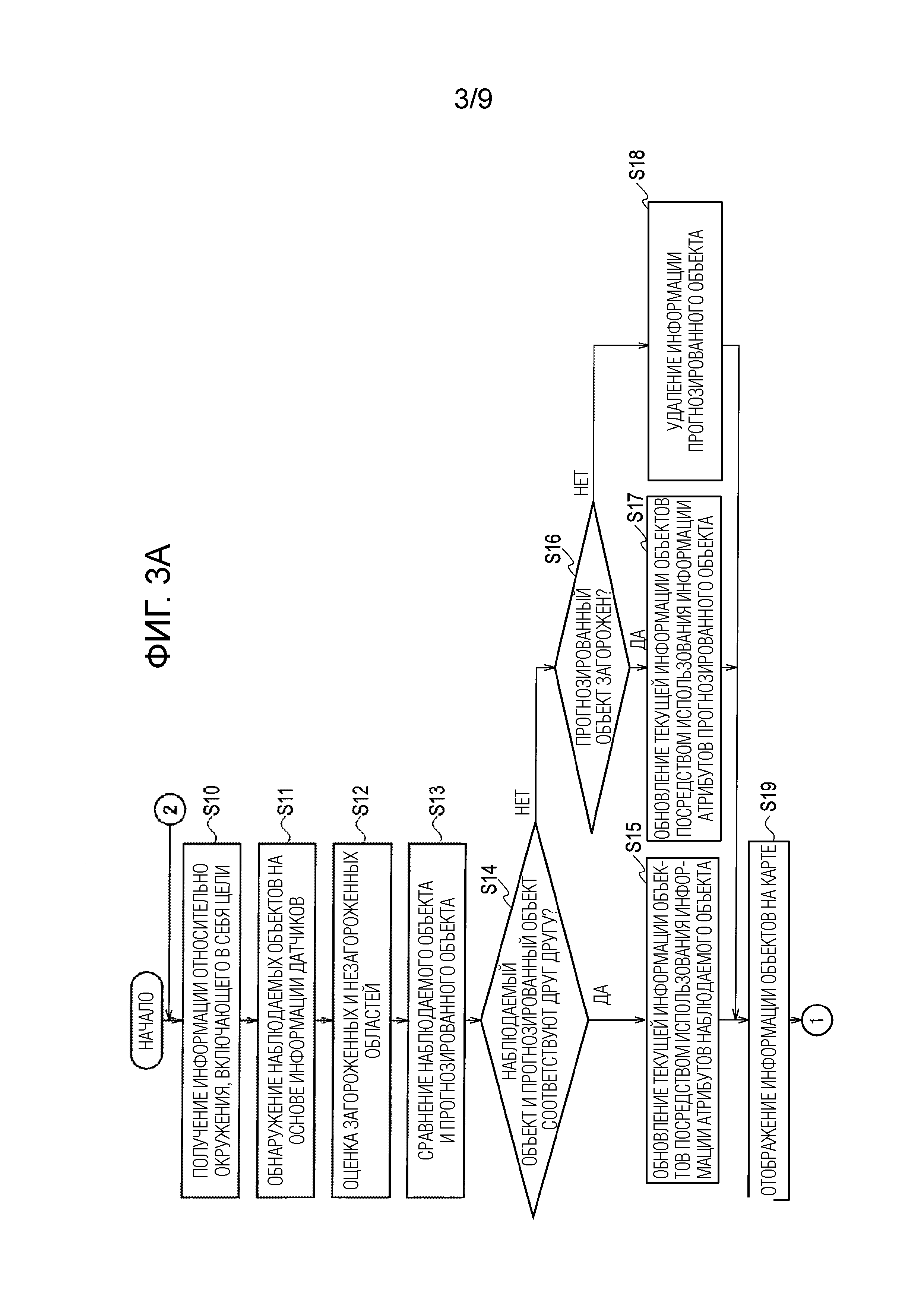
Фиг. 3A является блок-схемой последовательности операций способа, поясняющей пример способа оценки расстояния между транспортными средствами посредством устройства оценки расстояния между транспортными средствами согласно варианту осуществления настоящего изобретения.
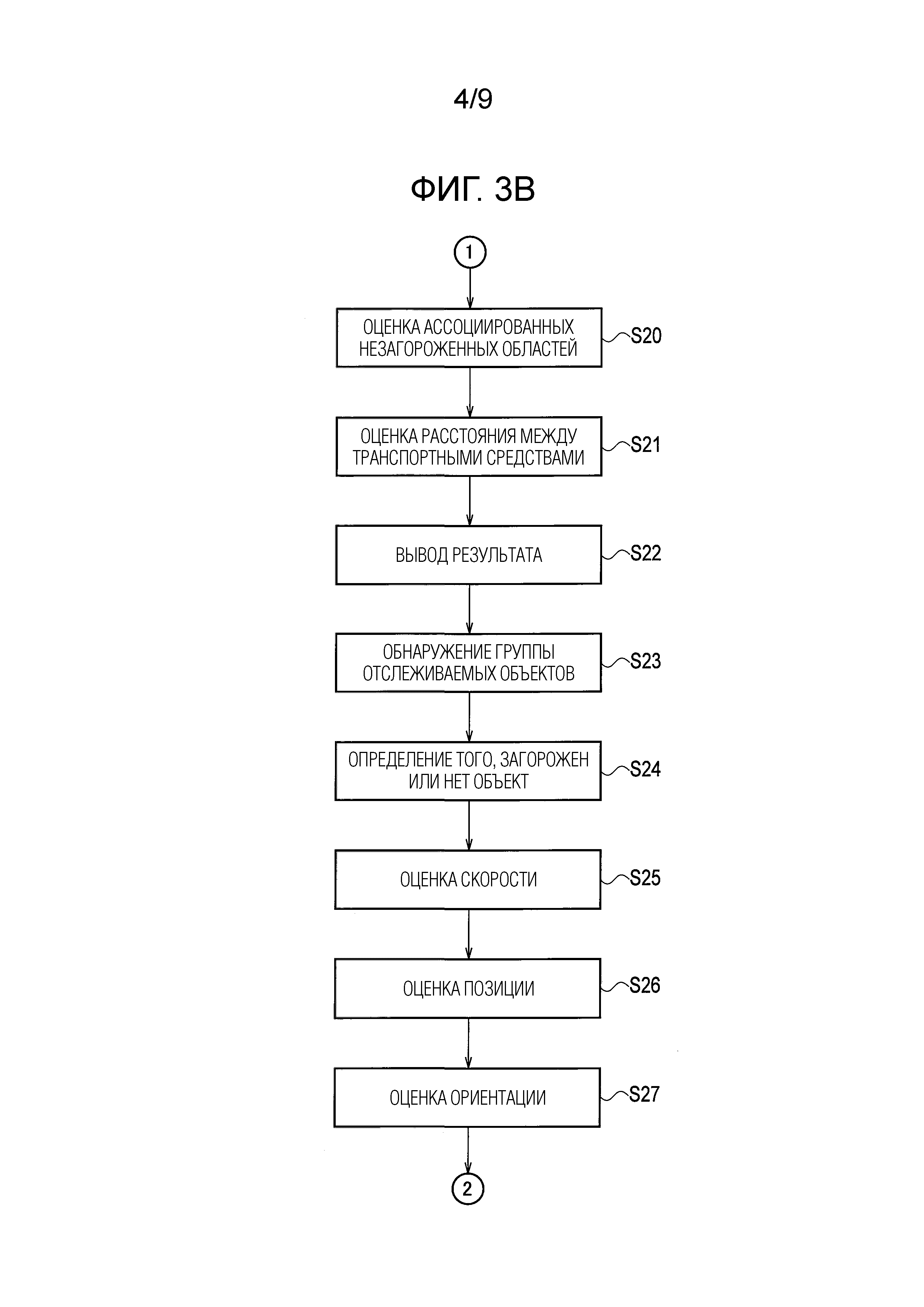
Фиг. 3B является блок-схемой последовательности операций способа, поясняющей пример способа оценки расстояния между транспортными средствами посредством устройства оценки расстояния между транспортными средствами согласно варианту осуществления настоящего изобретения.
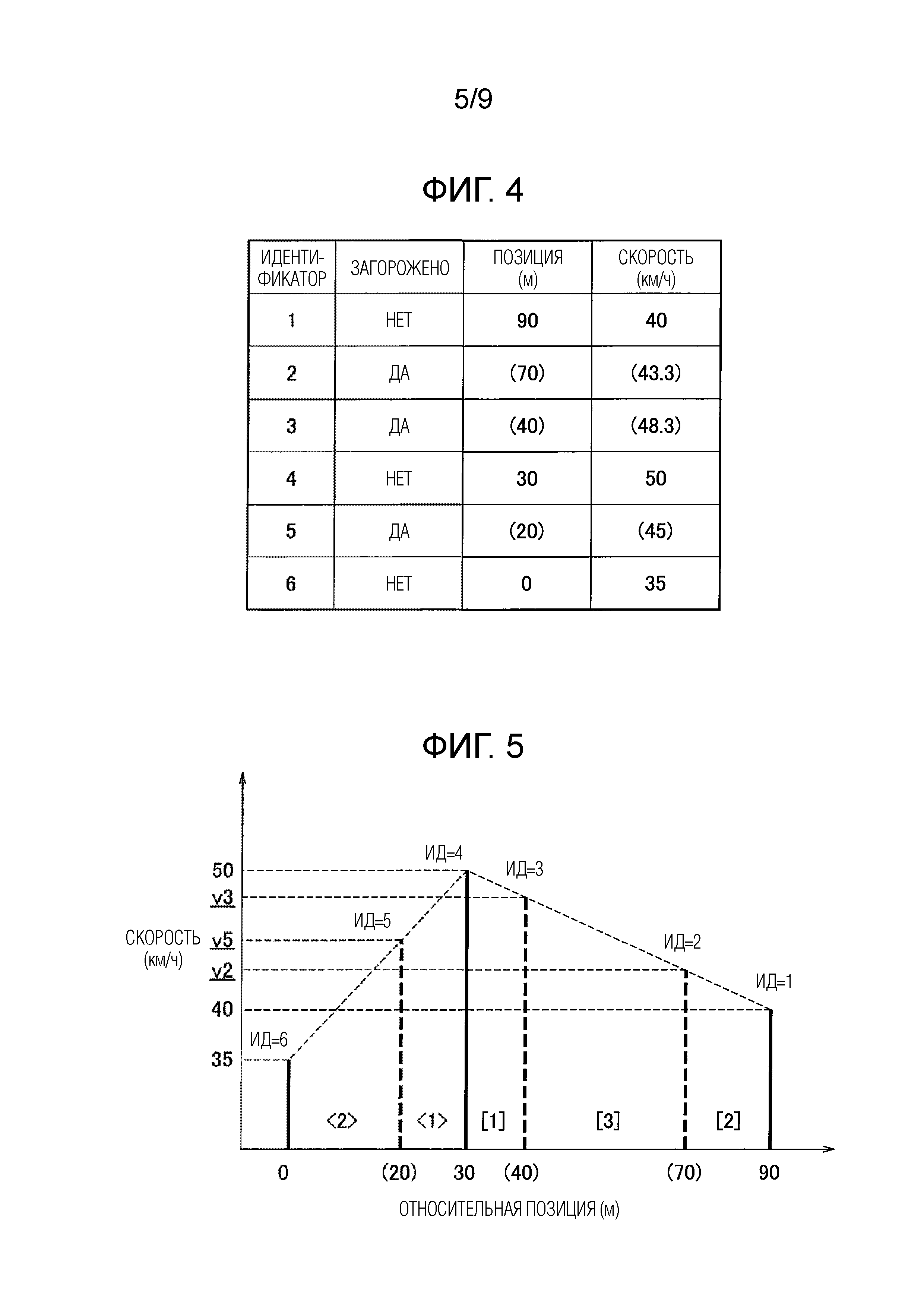
Фиг. 4 является примером, иллюстрирующим информацию атрибутов множества отслеживаемых транспортных средств.
Фиг. 5 является графиком, поясняющим способ вычисления оцененных значений, перечисленных на фиг. 4.
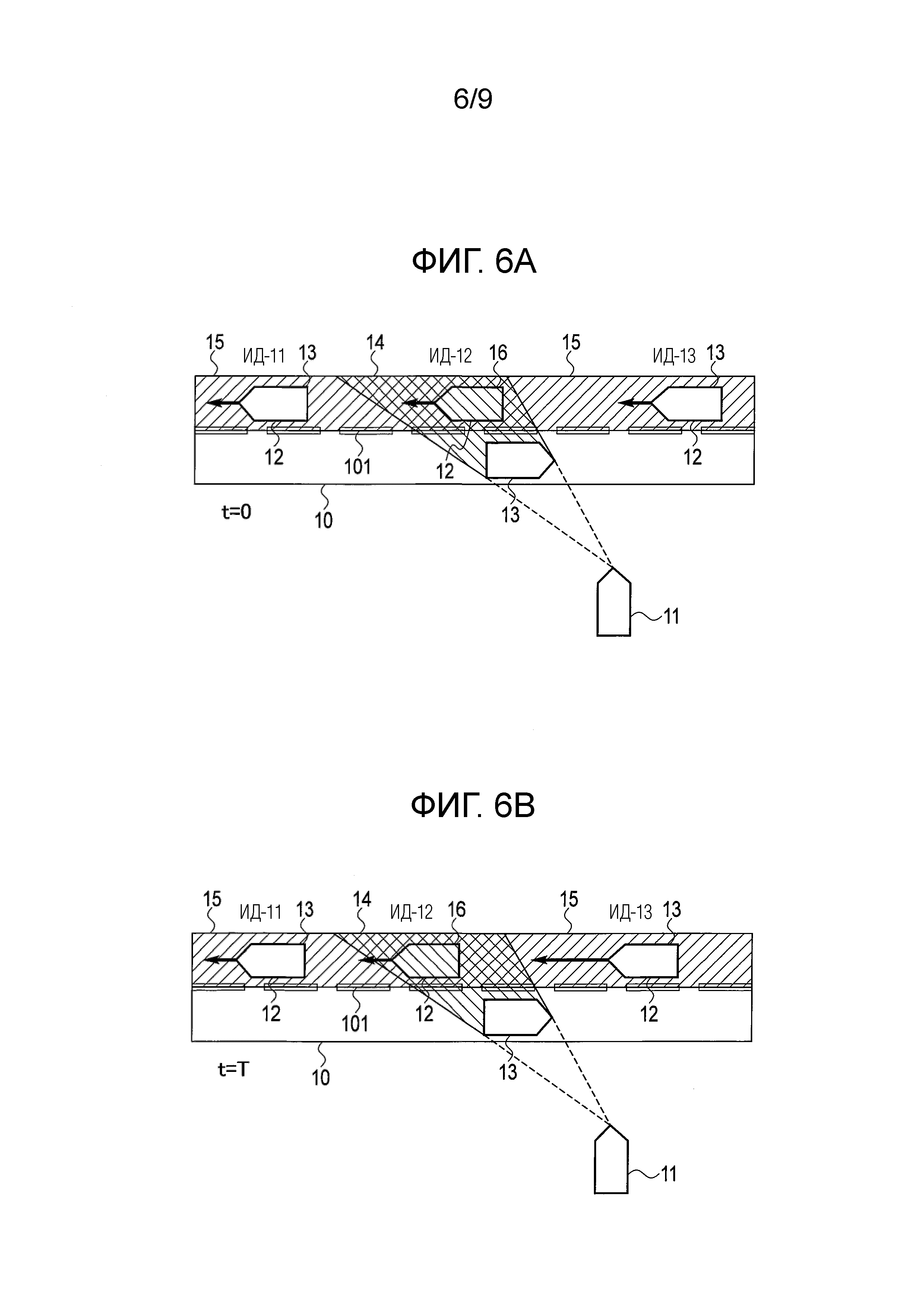
Фиг. 6A является схемой, поясняющей ситуацию, когда отслеживаемое транспортное средство в загороженной области ускоряется.
Фиг. 6B является схемой, поясняющей ситуацию, когда отслеживаемое транспортное средство в загороженной области ускоряется.
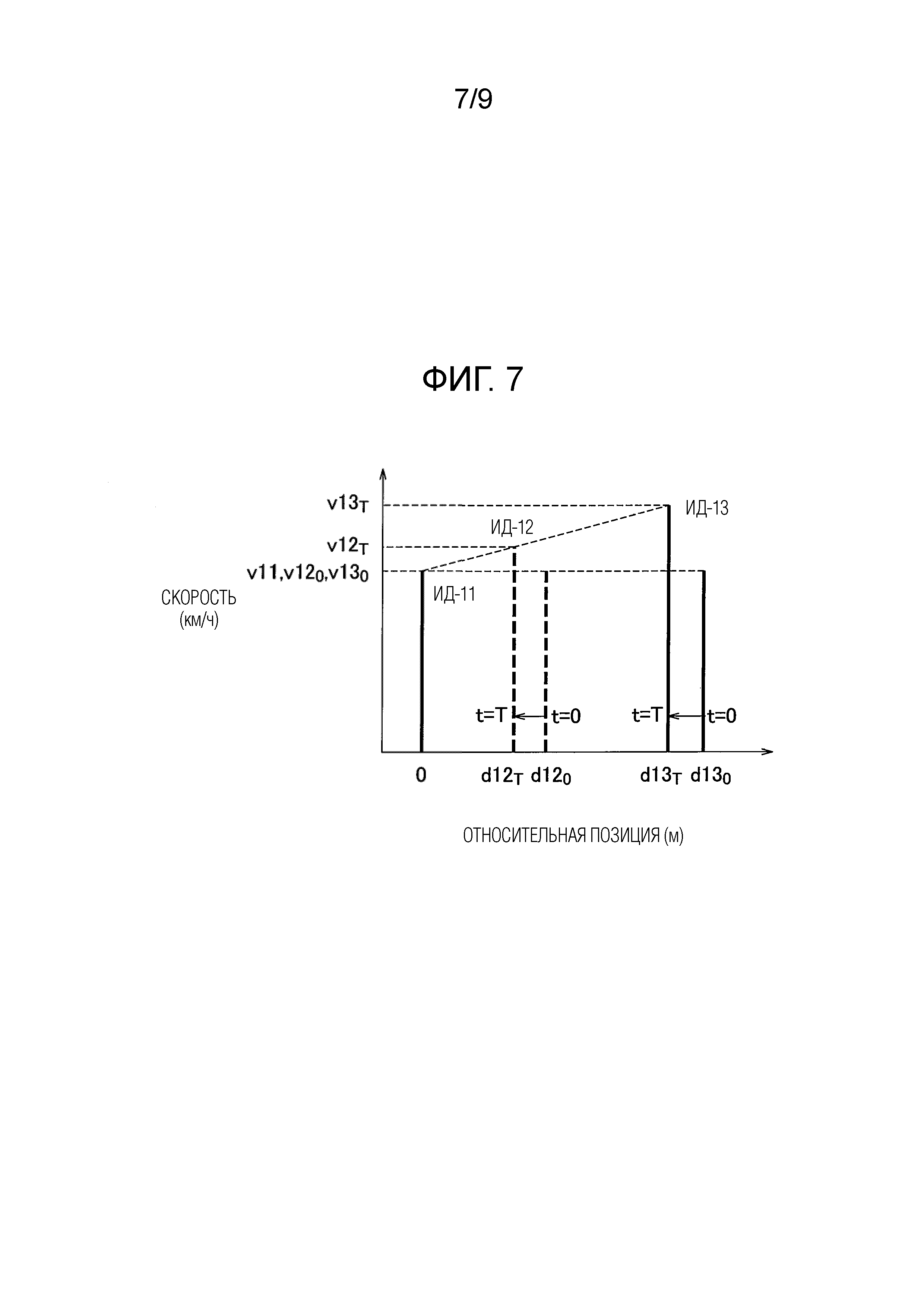
Фиг. 7 является графиком, иллюстрирующим скорости и позиции множества отслеживаемых транспортных средств.
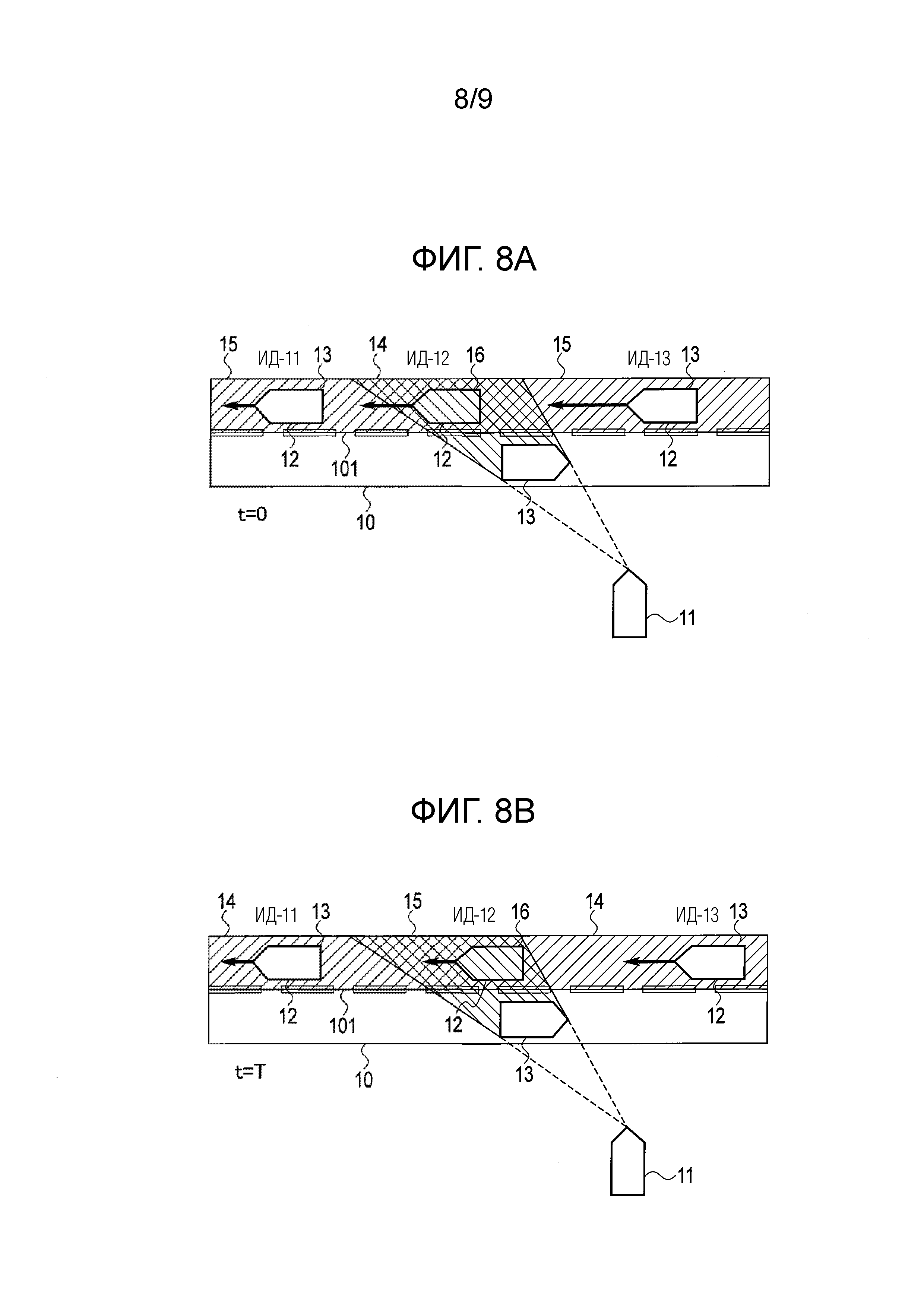
Фиг. 8A является схемой, поясняющей ситуацию, когда отслеживаемое транспортное средство в загороженной области замедляется.
Фиг. 8B является схемой, поясняющей ситуацию, когда отслеживаемое транспортное средство в загороженной области замедляется.
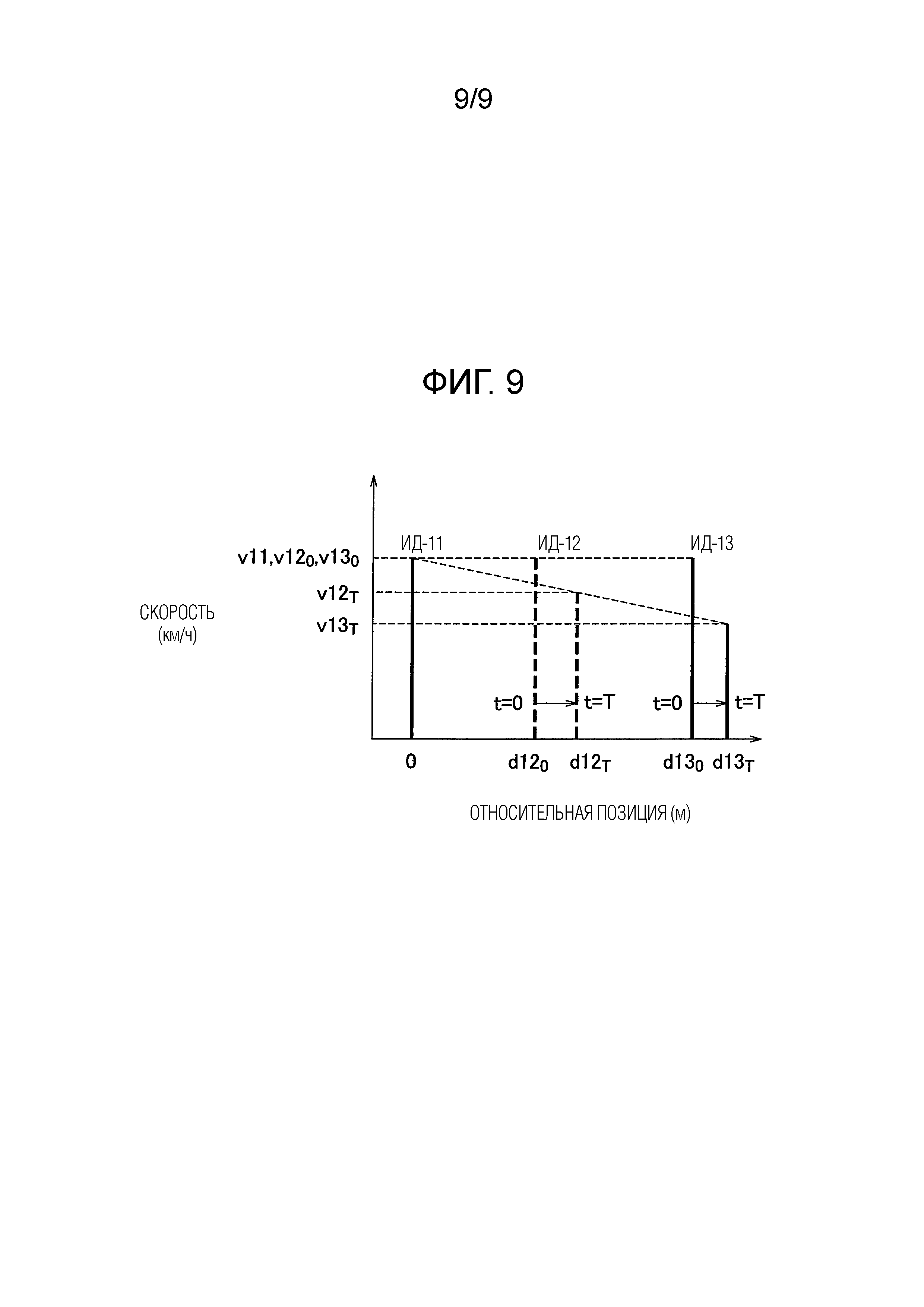
Фиг. 9 является графиком, иллюстрирующим скорости и позиции множества отслеживаемых транспортных средств.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Далее описывается вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании чертежей идентичные или аналогичные части обозначаются посредством идентичных или аналогичных ссылок с номерами, и перекрывающееся описание опускается.
[0010] Устройство оценки расстояния между транспортными средствами
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 20 оценки расстояния между транспортными средствами согласно этому варианту осуществления. Устройство 20 оценки расстояния между транспортными средствами включает в себя датчик 21, модуль 22 хранения картографических данных, модуль 23 оценки собственного местоположения, модуль 24 получения информации перемещения, модуль 25 вывода и схему 30 обработки. Как проиллюстрировано на фиг. 2, устройство 20 оценки расстояния между транспортными средствами, например, монтируется на транспортном средстве 11 (рассматриваемом транспортном средстве) и оценивает расстояния между транспортными средствами в линии транспортных средств, включающих в себя другие транспортные средства, загороженные помехами.
[0011] Датчик 21 монтируется на транспортном средстве 11 и обнаруживает позиционную информацию объектов около транспортного средства 11 и выводит ее в схему 30 обработки. В качестве датчика 21, можно использовать датчик дальности или датчик изображений, такой как, например, лазерный дальномер (LRF), радар миллиметрового диапазона, ультразвуковой датчик или стереокамера. Датчик 21 может быть сконфигурирован из множества типов датчиков и выполнен с возможностью обнаруживать скорости, ускорения, формы, цвета и т.д. объектов в окружающей области. Например, датчик 21 сканирует предварительно определенный диапазон около транспортного средства 11, чтобы получать трехмерные данные расстояния окружения. Трехмерные данные расстояния являются данными точечных групп, указывающими трехмерные позиции относительно датчика 21.
[0012] Модуль 22 хранения картографических данных представляет собой устройство хранения данных, сохраняющее картографические данные высокой четкости. Модуль 22 хранения картографических данных может монтироваться на транспортном средстве 11 или устанавливаться на сервере и т.п., соединенном с линией связи. В картографических данных, может записываться общая картографическая информация дорог, перекрестков, мостов, туннелей и т.п., а также может записываться информация относительно дорожных сооружений, такая как позиции полос движения и классификация зон трафика и информация относительно местоположений, форм и т.д. ориентиров около дорог.
[0013] Модуль 23 оценки собственного местоположения оценивает собственное местоположение транспортного средства 11 в картографических данных, сохраненных в модуле 22 хранения картографических данных. Собственное местоположение включает в себя ориентацию транспортного средства 11. Модуль 23 оценки собственного местоположения оценивает собственное местоположение на основе информации, полученной из устройства позиционирования, такого как приемное устройство на основе глобальной системы позиционирования (GPS), и датчика ускорения, датчика угловой скорости, датчика угла поворота при рулении, датчика скорости и т.п., смонтированных на транспортном средстве 11. Модуль 23 оценки собственного местоположения может оценивать конкретное собственное местоположение в картографических данных посредством вычисления позиции транспортного средства 11 относительно ориентиров, записанных в картографических данных, из информации, полученной посредством датчика 21.
[0014] Модуль 24 получения информации перемещения получает информацию перемещения, указывающую состояния перемещения транспортного средства 11, к примеру, его скорость, ускорение, угловую скорость, угол поворота при рулении и т.п. Информация перемещения получается из датчика скорости, датчика ускорения, датчика угловой скорости, датчика угла поворота при рулении и т.п., смонтированных на транспортном средстве 11.
[0015] Модуль 25 вывода представляет собой интерфейс (интерфейс) вывода, который выводит результат вычисления посредством схемы 30 обработки. Например, модуль 25 вывода выводит результат вычисления посредством схемы 30 обработки в схему управления, которая автоматически управляет приведением в движение транспортного средства 11. Направление вывода, в которое модуль 25 вывода выводит результат вычисления, может представлять собой устройство отображения, динамик и т.п. для представления информации пассажиру транспортного средства 11.
[0016] Схема 30 обработки имеет модуль 31 обнаружения объектов, модуль 32 оценки областей, модуль 33 сравнения объектов, модуль 34 хранения результатов распознавания, модуль 35 оценки расстояния между транспортными средствами и модуль 40 прогнозирования перемещения объектов. Схема 30 обработки включает в себя программируемое обрабатывающее устройство, такое как обрабатывающее устройство, включающее в себя электрическую схему. Помимо этого, схема обработки может включать в себя устройство, такое как специализированная интегральная схема (ASIC) или схемные компоненты, выполненные с возможностью выполнять функции, которые должны описываться. Схема 30 обработки может быть сконфигурирована из одной или более схем обработки. Схема 30 обработки может использоваться также в качестве электронного модуля управления (ECU), используемого для других типов управления для транспортного средства 11.
[0017] Модуль 31 обнаружения объектов обнаруживает наблюдаемые объекты 13 около транспортного средства 11 на основе информации, полученной посредством датчика 21. Наблюдаемые объекты 13 представляют собой объекты, которые не загорожены помехами от датчика 21 и наблюдаются с помощью датчика 21. Модуль 31 обнаружения объектов получает информацию атрибутов каждого наблюдаемого объекта 13 на основе информации, полученной посредством датчика 21, картографических данных, сохраненных в модуле 22 хранения картографических данных, собственного местоположения, оцененного посредством модуля 23 оценки собственного местоположения, и информации перемещения, полученной посредством модуля 24 получения информации перемещения. Информация атрибутов может включать в себя позицию, скорость, ускорение, ориентацию, форму, цвет и тип наблюдаемого объекта 13. Следует отметить, что скорость и ускорение наблюдаемого объекта 13 может включать в себя информацию относительно направления поворота. Модуль 31 обнаружения объектов задает идентификатор для каждого обнаруженного наблюдаемого объекта 13 и определяет информацию атрибутов и идентификатор наблюдаемого объекта 13 в качестве информации объектов для наблюдаемого объекта 13.
[0018] Модуль 32 оценки областей оценивает загороженные области 14, загороженные помехами от датчика 21, и незагороженные области 15, незагороженные от датчика 21, около транспортного средства 11. Помехи представляют собой наблюдаемые объекты 13. Например, модуль 32 оценки областей определяет границы между загороженными областями 14 и незагороженными областями 15 посредством извлечения, из данных точечных групп, полученных посредством датчика 21, фрагментов данных точечных групп в диапазоне, охватывающем предварительно определенную высоту от поверхности земли, и соединения извлеченных фрагментов данных точечных групп. Модуль 32 оценки областей оценивает дальнюю сторону каждой определенной границы в качестве загороженной области 14 и ближнюю сторону каждой определенной границы в качестве незагороженной области 15. Модуль 32 оценки областей оценивает области, размещающие между собой загороженную область 14 в горизонтальном направлении, в качестве двух незагороженных областей 15.
[0019] Модуль 33 сравнения объектов сравнивает каждый наблюдаемый объект 13, обнаруженный посредством модуля 31 обнаружения объектов, и прогнозированный объект, прогнозированный посредством модуля 40 прогнозирования перемещения объектов, друг с другом и определяет то, соответствуют или нет наблюдаемый объект 13 и прогнозированный объект друг другу. Модуль 33 сравнения объектов определяет то, соответствуют или нет наблюдаемый объект 13 и прогнозированный объект друг другу, на основе подобия между информацией атрибутов наблюдаемого объекта 13 и информацией атрибутов прогнозированного объекта.
[0020] На основе собственного местоположения, оцененного посредством модуля 23 оценки собственного местоположения, и информации перемещения, полученной посредством модуля 24 получения информации перемещения, модуль 34 хранения результатов распознавания сохраняет информацию объектов, полученную из модуля 31 обнаружения объектов, в ассоциации с картографическими данными, сохраненными в модуле 22 хранения картографических данных, в качестве результата распознавания. Модуль 34 хранения результатов распознавания отображает информацию объектов, определенную посредством модуля 31 обнаружения объектов, в картографических данных. Модуль 34 хранения результатов распознавания обновляет информацию объектов, определенную посредством модуля 31 обнаружения объектов, в соответствии с результатом определения посредством модуля 33 сравнения объектов. Модуль 34 хранения результатов распознавания запоминает идентификаторы в определенных фрагментах сохраненной информации объектов в соответствии с результатом определения посредством модуля 33 сравнения объектов, чтобы за счет этого отслеживать каждое отслеживаемое транспортное средство 12, движущееся в загороженной области 14 или незагороженной области 15.
[0021] На основе собственного местоположения, оцененного посредством модуля 23 оценки собственного местоположения, и информации перемещения, полученной посредством модуля 24 получения информации перемещения, модуль 34 хранения результатов распознавания задает загороженные области 14 и незагороженные области 15, оцененные посредством модуля 32 оценки областей, в идентичной полосе движения, записанной в картографических данных. Модуль 34 хранения результатов распознавания сохраняет загороженные области 14 и незагороженные области 15, заданные в идентичной полосе движения, в ассоциации друг с другом. На основе картографических данных, модуль 34 хранения результатов распознавания оценивает область в полосе движения, в которой, как оценено, находятся загороженные области 14 и незагороженные области 15, ассоциированные друг с другом, в качестве области 101 движения, в которой движутся отслеживаемые транспортные средства 12 или цели отслеживания.
[0022] Модуль 35 оценки расстояния между транспортными средствами оценивает расстояния между транспортными средствами между множеством отслеживаемых транспортных средств 12, движущихся в идентичной области 101 движения, на основе информации объектов, сохраненной в модуле 34 хранения результатов распознавания. Модуль 35 оценки расстояния между транспортными средствами оценивает расстояния между транспортными средствами между множеством отслеживаемых транспортных средств 12 на основе оцененных скоростей отслеживаемых транспортных средств 12, движущихся в загороженной области 14.
[0023] Модуль 40 прогнозирования перемещения объектов имеет модуль 41 обнаружения групп отслеживаемых объектов, модуль 42 определения загораживания, модуль 43 оценки скорости, модуль 44 оценки позиции и модуль 45 оценки ориентации. Модуль 40 прогнозирования перемещения объектов прогнозирует информацию атрибутов наблюдаемых объектов 13 и ненаблюдаемых объектов 16 на основе информации объектов для наблюдаемых объектов 13. Модуль 40 прогнозирования перемещения объектов выводит прогнозированную информацию атрибутов и идентификатор каждого из наблюдаемых объектов 13 и ненаблюдаемых объектов 16 в качестве информации объектов для прогнозированного объекта.
[0024] На основе результата распознавания в модуле 34 хранения результатов распознавания, модуль 41 обнаружения групп отслеживаемых объектов обнаруживает группу объектов, присутствующих в загороженных областях 14 и незагороженных областях 15 и имеющих идентичное направление перемещения, в качестве множества отслеживаемых транспортных средств 12. Модуль 41 обнаружения групп отслеживаемых объектов может обнаруживать группу объектов, присутствующих в области 101 движения, оцененной посредством модуля 34 хранения результатов распознавания, в качестве множества отслеживаемых транспортных средств 12. Альтернативно, модуль 41 обнаружения групп отслеживаемых объектов может обнаруживать наблюдаемые объекты 13, перемещающиеся в любых незагороженных областях 15 в направлении движения множества уже обнаруженных отслеживаемых транспортных средств 12, в качестве отслеживаемых транспортных средств 12.
[0025] Для каждого объекта в группе объектов, обнаруженных посредством модуля 41 обнаружения групп отслеживаемых объектов, модуль 42 определения загораживания определяет то, загорожен или нет объект посредством другой помехи от датчика 21. В частности, модуль 42 определения загораживания определяет то, присутствует или нет каждый объект в любой из загороженной области 14 и незагороженной области 15. Объект, определенный посредством модуля 42 определения загораживания как незагороженный, представляет собой наблюдаемый объект 13, тогда как объект, определенный посредством модуля 42 определения загораживания как загороженный, представляет собой ненаблюдаемый объект 16.
[0026] Модуль 43 оценки скорости оценивает скорости множества отслеживаемых транспортных средств 12, обнаруженных посредством модуля 41 обнаружения групп отслеживаемых объектов. Модуль 43 оценки скорости оценивает текущую скорость ненаблюдаемого объекта 16, присутствующего в загороженной области 1,4 на основе текущих скоростей двух наблюдаемых объектов 13, перемещающихся, соответственно, в двух незагороженных областях 15, размещающих между собой загороженную область 14, в которой присутствует ненаблюдаемый объект 16.
[0027] На основе скоростей, оцененных посредством модуля 43 оценки скорости, и информации атрибутов наблюдаемых объектов 13, модуль 44 оценки позиции оценивает текущие позиции отслеживаемых транспортных средств 12.
[0028] На основе скоростей, оцененных посредством модуля 43 оценки скорости, и информации атрибутов наблюдаемых объектов 13, модуль 45 оценки ориентации оценивает текущие ориентации отслеживаемых транспортных средств 12. Модуль 45 оценки ориентации может оценивать ориентации отслеживаемых транспортных средств 12 на основе формы дороги, записанной в картографических данных.
[0029] Способ оценки расстояния между транспортными средствами
Далее описывается пример способа оценки расстояния между транспортными средствами посредством устройства 20 оценки расстояния между транспортными средствами с использованием блок-схем последовательности операций способа на фиг. 3A-3B. Последовательность процессов, которая представляется ниже, повторно выполняется в предварительно определенные времена. Ниже приводится примерное описание ситуации, когда, как проиллюстрировано на фиг. 2, дорога 10 присутствует впереди транспортного средства 11 с устройством 20 оценки расстояния между транспортными средствами, смонтированным на нем, и устройство 20 оценки расстояния между транспортными средствами оценивает расстояния между транспортными средствами между множеством отслеживаемых транспортных средств 12, движущихся в полосе движения на дальней стороне дороги 10, для въезда транспортного средства 11 в поток в полосе движения на дальней стороне.
[0030] Во-первых, на этапе S10, датчик 21 получает информацию относительно окружения, включающего в себя цели отслеживания (множество отслеживаемых транспортных средств 12). В примере, проиллюстрированном на фиг. 2, датчик 21 получает позиционную информацию, по меньшей мере, объектов впереди транспортного средства 11.
[0031] На этапе S11, модуль 31 обнаружения объектов обнаруживает наблюдаемые объекты 13 и информацию объектов для наблюдаемых объектов 13 на основе информации, полученной на этапе S10. Модуль 31 обнаружения объектов может обнаруживать наблюдаемые объекты 13, включающие в себя ориентиры, в окружающей области и информацию объектов для наблюдаемых объектов 13 на основе картографических данных, собственного местоположения и информации перемещения транспортного средства 11.
[0032] На этапе S12, модуль 32 оценки областей оценивает множество загороженных областей 14, загороженных помехами от датчика 21, и множество незагороженных областей 15, незагороженных от датчика 21, на основе информации, полученной на этапе S10.
[0033] На этапе S13, модуль 33 сравнения объектов сравнивает информацию объектов каждого наблюдаемого объекта 13, обнаруженного на этапе S11, и информацию объектов для прогнозированного объекта, прогнозированного посредством модуля 40 прогнозирования перемещения объектов. Следует отметить, что этап S13 выполняется при таком допущении, что информация объектов для прогнозированного объекта, полученная на этапах S23-S27, которые описываются ниже, введена в модуль 33 сравнения объектов.
[0034] На этапе S14, модуль 33 сравнения объектов определяет то, соответствуют или нет наблюдаемый объект 13 и его прогнозированный объект друг другу, на основе подобия между информацией атрибутов наблюдаемого объекта 13 и информацией атрибутов прогнозированного объекта. Если модуль 33 сравнения объектов определяет то, что они соответствуют друг другу, обработка переходит к этапу S15. Если модуль 33 сравнения объектов определяет то, что они не соответствуют друг другу, обработка переходит к этапу S16.
[0035] На этапе S15, модуль 34 хранения результатов распознавания обновляет текущую информацию объектов для наблюдаемого объекта 13 посредством использования его информации атрибутов. В частности, модуль 34 хранения результатов распознавания заменяет уже сохраненную информацию атрибутов в информации объектов для наблюдаемого объекта 13 на информацию атрибутов в данный момент времени, полученную на этапе S11, и сохраняет ее в качестве новой информации объектов для наблюдаемого объекта 13.
[0036] На этапе S16, модуль 33 сравнения объектов определяет то, загорожен или нет прогнозированный объект. В частности, на основе информации атрибутов прогнозированного объекта и загороженных областей 14, оцененных посредством модуля 32 оценки областей, модуль 33 сравнения объектов определяет то, присутствует или нет прогнозированный объект в загороженной области 14. Если модуль 33 сравнения объектов определяет то, что прогнозированный объект загорожен, обработка переходит к этапу S17. Если модуль 33 сравнения объектов определяет то, что прогнозированный объект не загорожен, обработка переходит к этапу S18.
[0037] На этапе S17, модуль 34 хранения результатов распознавания обновляет текущую информацию объектов посредством использования информации атрибутов прогнозированного объекта. В частности, модуль 34 хранения результатов распознавания заменяет уже сохраненную информацию атрибутов в информации объектов для наблюдаемого объекта 13 на информацию атрибутов прогнозированного объекта в данный момент времени, введенную в модуль 33 сравнения объектов, и сохраняет ее в качестве информации объектов для ненаблюдаемого объекта 16.
[0038] На этапе S18, модуль 34 хранения результатов распознавания удаляет информацию объектов для прогнозированного объекта в данный момент времени, введенную в модуль 33 сравнения объектов. В частности, модуль 34 хранения результатов распознавания хранит уже сохраненную информацию объектов для наблюдаемого объекта 13 без ее изменения. Следует отметить, что если информация объектов для прогнозированного объекта не введена, либо если информация объектов для наблюдаемого объекта 13 никогда не сохранялась до этого, то на этапе S18, модуль 34 хранения результатов распознавания сохраняет информацию объектов для наблюдаемого объекта 13, обнаруженного на этапе S11.
[0039] На этапе S19, модуль 34 хранения результатов распознавания отображает информацию объектов для наблюдаемого объекта 13 или ненаблюдаемого объекта 16, сохраненную на одном из этапов S15-S18, в картографических данных. Модуль 34 хранения результатов распознавания отображает информацию объектов для наблюдаемого объекта 13 или ненаблюдаемого объекта 16 в картографических данных на основе картографических данных, собственного местоположения и информации перемещения транспортного средства 11.
[0040] На этапе S20, модуль 34 хранения результатов распознавания оценивает загороженные области 14 и незагороженные области 15, ассоциированные друг с другом, из множества загороженных областей 14 и множества незагороженных областей 15, оцененных на этапе S12, например, на основе картографических данных, собственного местоположения и информации перемещения транспортного средства 11. Например, модуль 34 хранения результатов распознавания оценивает область 101 движения в картографических данных в области, охватывающей предварительно определенный диапазон в полосе движения, в которой оценено то, что присутствуют множество загороженных областей 14 и множество незагороженных областей 15. Модуль 34 хранения результатов распознавания оценивает множество загороженных областей 14 и множество незагороженных областей 15, которые оценены как присутствующие в идентичной области 101 движения, в качестве множества загороженных областей 14 и множества незагороженных областей 15, ассоциированных друг с другом. Между тем, модуль 34 хранения результатов распознавания может оценивать область 101 движения на основе области, в которой обнаруживаются множество объектов, имеющих идентичное направление перемещения, без использования картографических данных.
[0041] На этапе S21, модуль 35 оценки расстояния между транспортными средствами оценивает расстояния между транспортными средствами между множеством отслеживаемых транспортных средств 12, движущихся в идентичной области 101 движения, оцененной на этапе S20. Множество отслеживаемых транспортных средств 12, движущихся в идентичной области 101 движения, формируются из множества наблюдаемых объектов 13 и множества ненаблюдаемых объектов 16. В частности, модуль 35 оценки расстояния между транспортными средствами оценивает расстояния между транспортными средствами между множеством отслеживаемых транспортных средств 12 на основе информации объектов для множества наблюдаемых объектов 13 и множества ненаблюдаемых объектов 16, присутствующих в области 101 движения, оцененной посредством модуля 34 хранения результатов распознавания.
[0042] На этапе S22, схема 30 обработки выводит расстояния между транспортными средствами между множеством отслеживаемых транспортных средств 12, оцененные на этапе S21, в модуль 25 вывода. Кроме того, схема 30 обработки также выводит информацию объектов для множества наблюдаемых объектов 13 и множества ненаблюдаемых объектов 16 и информацию относительно множества загороженных областей 14 и множества незагороженных областей 15, сохраненную в модуле 34 хранения результатов распознавания в модуль 25 вывода.
[0043] На этапе S23, модуль 41 обнаружения групп отслеживаемых объектов обнаруживает группу объектов, имеющих идентичное направление перемещения, из числа наблюдаемых объектов 13 и ненаблюдаемых объектов 16, присутствующих во множестве загороженных областей 14 и множестве незагороженных областей 15, ассоциированных друг с другом, оцененных на этапе S20, в качестве множества отслеживаемых транспортных средств 12. Модуль 41 обнаружения групп отслеживаемых объектов может просто обнаруживать группу объектов, присутствующих во множестве загороженных областей 14 и множестве незагороженных областей 15, ассоциированных друг с другом, в качестве множества отслеживаемых транспортных средств 12.
[0044] На этапе S24, на основе информации объектов для группы объектов, обнаруженных на этапе S23, модуль 42 определения загораживания определяет, для каждого объекта в группе объектов, то, загорожен или нет объект помехой от датчика 21. Например, модуль 42 определения загораживания определяет то, загорожен или нет объект, посредством обращения к информации, содержащейся в ее информации атрибутов и указывающей то, загорожен или нет объект. В этом случае, на этапе S16, модуль 33 сравнения объектов, возможно, просто должен определять то, загорожен или нет прогнозированный объект, и добавлять результат определения в информацию атрибутов. Объект, который не загорожен, представляет собой наблюдаемый объект 13, тогда как объект, который загорожен, представляет собой ненаблюдаемый объект 16.
[0045] На этапе S25, модуль 43 оценки скорости оценивает скорость каждого ненаблюдаемого объекта 16, определенного как загороженный, на этапе S24, на основе информации атрибутов наблюдаемых объектов 13, определенных как не загороженные. В частности, модуль 43 оценки скорости оценивает скорость одного или более ненаблюдаемых объектов 16 или одного или более отслеживаемых транспортных средств 12, движущихся в одной загороженной области 14, на основе скоростей двух наблюдаемых объектов 13 или двух отслеживаемых транспортных средств 12, движущихся, соответственно, в двух незагороженных областях 15, размещающих между собой эту загороженную область 14.
[0046] Ниже приводится конкретное описание способа оценки скоростей ненаблюдаемых объектов 16 в случае, если, например, как проиллюстрировано на фиг. 2, идентификаторы 1-6 задаются в информации объектов отслеживаемых транспортных средств 12, движущихся во множестве загороженных областей 14 и множестве незагороженных областей 15. В примере, проиллюстрированном на фиг. 2, отслеживаемые транспортные средства 12 с идентификаторами 1, 4 и 6 представляют собой наблюдаемые объекты 13, и отслеживаемые транспортные средства 12 с идентификаторами 2, 3 и 5 представляют собой ненаблюдаемые объекты 16.
[0047] Фиг. 4 является таблицей, указывающей то, загорожены или нет отслеживаемые транспортные средства 12 с идентификаторами 1-6, их позиции и их скорости в данное время. Позиция каждого отслеживаемого транспортного средства 12, например, представляет собой относительную позицию на основе позиции отслеживаемого транспортного средства 12 с идентификатором 6 в заднем конце диапазона обнаружения. Позиции отслеживаемых транспортных средств 12 с идентификаторами 2, 3 и 5 оцениваются из их скоростей, оцененных в предыдущее время. Следует отметить, что числовые значения в круглой скобке означают оцененные значения.
[0048] Фиг. 5 является графиком, поясняющим способ оценки скоростей ненаблюдаемых объектов 16 из информации атрибутов наблюдаемых объектов 13, перечисленных на фиг. 4. Позиции наблюдаемых объектов 13 или отслеживаемых транспортных средств 12 с идентификаторами 1, 4 и 6 составляют 90 м, 30 м и 0 м, соответственно. Позиции ненаблюдаемых объектов 16 или отслеживаемых транспортных средств 12 с идентификаторами 2, 3 и 5, оцененные в предыдущее время, составляют 70 м, 40 м и 20 м, соответственно. Отношение между расстояниями между транспортными средствами между отслеживаемыми транспортными средствами 12 с идентификаторами 1-4 составляет 2:3:1 (см. скобки на фиг. 5). Отношение между расстояниями между транспортными средствами между отслеживаемыми транспортными средствами 12 с идентификаторами 4-6 составляет 1:2 (см. угловые скобки на фиг. 5).
[0049] Модуль 43 оценки скорости оценивает, в качестве скорости каждого ненаблюдаемого объекта 16, значение посредством внутреннего деления скоростей двух наблюдаемых объектов 13, размещающих между собой ненаблюдаемый объект 16, на отношение расстояния между объектами с использованием позиции ненаблюдаемого объекта 16, оцененной в предыдущее время. Скорости наблюдаемых объектов 13 с идентификаторами 1 и 4 составляют 40 км/ч и 50 км/ч, соответственно. Посредством внутреннего деления двух скоростей на отношение расстояния между объектами вычисляется оцененная скорость ненаблюдаемого объекта 16 с идентификатором 2 или 3.
[0050] Пусть v2 представляет собой скорость ненаблюдаемого объекта 16 с идентификатором 2, пусть v3 представляет собой скорость ненаблюдаемого объекта 16 с идентификатором 3, и пусть v5 представляет собой скорость ненаблюдаемого объекта 16 с идентификатором 5. В таком случае v2, v3 и v5 могут выражаться как уравнения (1)-(3), соответственно.
v2=40+10 x (2/6)=43,3... (1)
v3=40+10 x (5/6)=48,3... (2)
v5=35+15 x (2/3)=45... (3)
[0051] На этапе S26, модуль 44 оценки позиции оценивает текущие позиции ненаблюдаемых объектов 16 на основе скоростей, оцененных на этапе S25, и информации атрибутов наблюдаемых объектов 13.
[0052] В частности, текущая позиция может находиться посредством вычисления величины изменения расстояния между транспортными средствами из их скоростей транспортного средства, оцененных в предыдущем цикле, и длительности цикла. Например, в случае если длительность обработки из предыдущего цикла составляет 100 мс, расстояние между транспортными средствами с идентификаторами 1 и 2 увеличивается на 9,2 см от 20 м (90-70 м (позиции на фиг. 5)) вследствие разности между вышеуказанными скоростями транспортного средства v1=40 км/ч и v2=43,3 км/ч. Посредством выполнения вычисления таким способом в каждом цикле обработки, можно точно оценивать расстояние между транспортными средствами до транспортного средства в загороженной области.
[0053] На этапе S27, модуль 45 оценки ориентации оценивает текущие ориентации ненаблюдаемых объектов 16 на основе скоростей, оцененных на этапе S25, и информации атрибутов наблюдаемых объектов 13.
[0054] Пример работы
Фиг. 6A и 6B являются схемами, поясняющими ситуацию, когда объекты с идентификаторами 11, 12 и 13, движутся на идентичной скорости во время t=0, и из этого состояния, один ненаблюдаемый объект 16 (идентификатор = 12), расположенный между двумя наблюдаемыми объектами 13 (идентификатор = 11, 13), ускоряется от времени t=0 до времени t=T. В случае если наблюдается то, что скорость отслеживаемого транспортного средства 12 с идентификатором 13 относительно отслеживаемого транспортного средства 12 с идентификатором 11 увеличена, можно оценивать то, что отслеживаемое транспортное средство 12 с идентификатором 12 или ненаблюдаемый объект 16 ускоряется от времени t=0 до времени t=T. Вследствие этого, оценивается то, что расстояния между транспортными средствами между тремя отслеживаемыми транспортными средствами 12 с идентификаторами 11-13 уменьшены.
[0055] Скорости транспортного средства и расстояния между транспортными средствами от времени t=0 до времени t=T вычисляются и обновляются на этапах S25 и S26 в каждом цикле обработки. Следовательно, из изменений скоростей транспортного средства двух наблюдаемых объектов 13 (идентификатор = 11, 13), расстояния между транспортными средствами до ненаблюдаемого объекта 16 (идентификатор = 12) могут точно оцениваться.
[0056] Как проиллюстрировано на фиг. 7, скорость отслеживаемого транспортного средства с идентификатором 11 во время t=0 составляет v11. Позиция и скорость отслеживаемого транспортного средства 12 с идентификатором 13 во время t=0 составляют d130 и v130, соответственно. Следует отметить, что позиция каждого отслеживаемого транспортного средства 12 представляет собой относительную позицию на основе позиции отслеживаемого транспортного средства 12 с идентификатором 11. Позиция отслеживаемого транспортного средства 12 с идентификатором 12, оцененная в предыдущее время, составляет d120. В этом случае, модуль 35 оценки расстояния между транспортными средствами вычисляет скорость v120 посредством внутреннего деления скорости v11 и скорости v130 на отношение между расстоянием от 0 до d120 и расстоянием от d120 до d130, в качестве оцененной скорости ненаблюдаемого объекта 16 во время t=0. Фиг. 7 иллюстрирует случай, в котором во время t=0, отслеживаемые транспортные средства 12 с идентификаторами 11 и 13 наблюдаются как имеющие идентичную скорость, и отслеживаемое транспортное средство 12 с идентификатором 12 также оценивается как имеющее идентичную скорость.
[0057] После этого, в качестве результата наблюдения отслеживаемых транспортных средств 12 с идентификаторами 11 и 13 во время t=T, позиция и скорость отслеживаемого транспортного средства 12 с идентификатором 13 составляют d13T и v13T, соответственно, и позиция отслеживаемого транспортного средства 12 с идентификатором 12, оцененная из скорости, и позиция отслеживаемого транспортного средства 12 с идентификатором 12 в предыдущее время, предшествующее времени t=T, составляет d12T. Как описано выше, скорости транспортного средства и расстояния между транспортными средствами от времени t=0 до времени t=T вычисляются и обновляются на этапах S25 и S26 в каждом цикле обработки.
[0058] В этом случае модуль 35 оценки расстояния между транспортными средствами вычисляет скорость v12T посредством внутреннего деления скорости v11 и скорости v13T на отношение между расстоянием от 0 до d12T и расстоянием от d12T до d13T, в качестве оцененной скорости ненаблюдаемого объекта 16 во время t=T.
[0059] Как описано выше, посредством оценки скорости отслеживаемого транспортного средства 12 с идентификатором 12 или ненаблюдаемым объектом 16, в соответствии с ускорением отслеживаемого транспортного средства 12 с идентификатором 13 или наблюдаемым объектом 13, можно повышать точность оценки скорости ненаблюдаемого объекта 16. Как результат, позиции множества отслеживаемых транспортных средств 12 в следующем цикле обработки точно оцениваются на основе оцененной скорости транспортного средства, и модуль 35 оценки расстояния между транспортными средствами в силу этого может точно оценивать расстояния между транспортными средствами.
[0060] Фиг. 8A и 8B являются схемами, поясняющими ситуацию, когда один ненаблюдаемый объект 16 (идентификатор = 12), расположенный между двумя наблюдаемыми объектами 13 (идентификатор = 11, 13), замедляется от времени t=0 до времени t=T. В случае если наблюдается то, что скорость отслеживаемого транспортного средства 12 с идентификатором 13 относительно отслеживаемого транспортного средства 12 с идентификатором 11 уменьшена, можно оценивать то, что отслеживаемое транспортное средство 12 с идентификатором 12 или ненаблюдаемым объектом 16 замедляется от времени t=0 до времени t=T. Вследствие этого, оценивается то, что расстояния между транспортными средствами между тремя отслеживаемыми транспортными средствами 12 с идентификаторами 11-13 увеличены.
[0061] Как проиллюстрировано на фиг. 9, модуль 35 оценки расстояния между транспортными средствами вычисляет скорость v120 посредством внутреннего деления скорости v11 и скорости v130 на отношение между расстоянием от 0 до d120 и расстоянием от d120 до d130, в качестве оцененной скорости ненаблюдаемого объекта 16 во время t=0. Фиг. 9 иллюстрирует случай, в котором во время t=0, отслеживаемые транспортные средства 12 с идентификаторами 11 и 13 наблюдаются как имеющие идентичную скорость, и отслеживаемое транспортное средство 12 с идентификатором 12 также оценивается как имеющее идентичную скорость. Аналогично, модуль 35 оценки расстояния между транспортными средствами вычисляет скорость v12T посредством внутреннего деления скорости v11 и скорости v13T на отношение между расстоянием от 0 до d12T и расстоянием от d12T до d130, в качестве оцененной скорости ненаблюдаемого объекта 16 во время t=T.
[0062] Как описано выше, посредством оценки скорости отслеживаемого транспортного средства 12 с идентификатором 12 или ненаблюдаемым объектом 16, в соответствии с замедлением отслеживаемого транспортного средства 12 с идентификатором 13 или наблюдаемым объектом 13, можно повышать точность оценки скорости ненаблюдаемого объекта 16. Как результат, позиции множества отслеживаемых транспортных средств 12 в следующем цикле обработки точно оцениваются на основе оцененной скорости транспортного средства, и модуль 35 оценки расстояния между транспортными средствами в силу этого может точно оценивать расстояния между транспортными средствами.
[0063] На основе скоростей транспортных средств, движущихся в идентичной полосе движения в двух незагороженных областях 15, размещающих между собой загороженную область 14, устройство 20 оценки расстояния между транспортными средствами согласно этому варианту осуществления оценивает их расстояния между транспортными средствами до транспортного средства, движущееся в идентичной полосе движения в загороженной области 14. Вкратце, на основе текущих скоростей двух наблюдаемых объектов 13, размещающих между собой ненаблюдаемый объект 16, устройство 20 оценки расстояния между транспортными средствами оценивает их текущие расстояния между транспортными средствами до ненаблюдаемого объекта 16. Таким образом, устройство 20 оценки расстояния между транспортными средствами может точно оценивать расстояния между транспортными средствами до ненаблюдаемого объекта 16.
[0064] Кроме того, устройство 20 оценки расстояния между транспортными средствами оценивает скорость транспортного средства, движущегося в идентичной полосе движения в загороженной области 14. В частности, устройство 20 оценки расстояния между транспортными средствами оценивает текущую скорость ненаблюдаемого объекта 16 на основе текущих скоростей двух наблюдаемых объектов 13, размещающих между собой ненаблюдаемый объект 16. Таким образом, устройство 20 оценки расстояния между транспортными средствами может точно оценивать скорость ненаблюдаемого объекта 16 и вследствие этого повышать точность оценки расстояния между транспортными средствами.
[0065] Кроме того, устройство 20 оценки расстояния между транспортными средствами оценивает область 101 движения, в которой движутся множество отслеживаемых транспортных средств 12, посредством использования картографических данных и оценивает множество незагороженных областей 15 в области 101 движения. Таким образом, устройство 20 оценки расстояния между транспортными средствами может точно оценивать незагороженные области 15 и в силу этого эффективно обнаруживать наблюдаемые объекты 13.
[0066] Кроме того, устройство 20 оценки расстояния между транспортными средствами отслеживает каждое отслеживаемое транспортное средство 12 на основе подобия между информацией атрибутов наблюдаемого объекта 13 и информацией атрибутов прогнозированного объекта. Устройство 20 оценки расстояния между транспортными средствами определяет то, соответствуют или нет наблюдаемый объект 13 и прогнозированный объект друг другу. В частности, посредством использования формы, цвета и т.п. отслеживаемого транспортного средства 12 в качестве его информации атрибутов, даже если отслеживаемое транспортное средство 12 временно въезжает в загороженную область 14, устройство 20 оценки расстояния между транспортными средствами может точно отслеживать идентичное отслеживаемое транспортное средство 12, когда оно въезжает в незагороженную область 15 снова.
[0067] Другие варианты осуществления
Хотя настоящее изобретение описывается так, как указано выше через вышеприведенный вариант осуществления, не следует понимать, что формулировки и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
[0068] Например, в вышеприведенном варианте осуществления, модуль 33 сравнения объектов может определять то, соответствуют или нет наблюдаемый объект 13 и прогнозированный объект друг другу, посредством использования их ориентаций в качестве их информации атрибутов. Таким образом, устройство 20 оценки расстояния между транспортными средствами может более точно отслеживать идентичное отслеживаемое транспортное средство 12. Следует отметить, что ориентация каждого отслеживаемого транспортного средства 12 может оцениваться, например, на основе участков, изогнутых в L-образной форме, в данных точечных групп, полученных посредством датчика 21, направления, тангенциального к предыстории перемещения, формы дороги и т.п.
[0069] Помимо вышеуказанного настоящее изобретение охватывает различные варианты осуществления и т.п., которые не описываются в данном документе, к примеру, конфигурации с использованием вышеописанных компонентов относительно друг друга, как само собой разумеющееся. Следовательно, объем настоящего изобретения определяется только посредством объектов, определяющих изобретение согласно формуле изобретения, которые считаются соответствующими из вышеприведенного описания.
Список ссылочных позиций
[0070] 11 - транспортное средство
12 - отслеживаемое транспортное средство
14 - загороженная область
15 - незагороженная область
20 - устройство оценки расстояния между транспортными средствами
21 - датчик
30 - схема обработки
101 - область движения
Реферат
Изобретение относится к оценке расстояния между транспортными средствами. Техническим результатом является повышение точности оценки расстояния между транспортными средствами. Способ оценки расстояния между транспортными средствами согласно одному аспекту настоящего изобретения включает в себя: оценку загороженной области, загороженной помехой от датчика, и двух незагороженных областей, размещающих между собой загороженную область; и на основе скоростей двух отслеживаемых транспортных средств, движущихся в идентичной полосе движения, соответственно, в двух незагороженных областях, оценку расстояния между транспортными средствами от двух отслеживаемых транспортных средств до отслеживаемого транспортного средства, движущегося в идентичной полосе движения в загороженной области. 2 н. и 3 з.п. ф-лы, 12 ил.
Комментарии