Радиолокационное считывание усилия - RU2746447C1
Код документа: RU2746447C1
Чертежи





Описание
Уровень техники
[001] Датчики усилия используются во множестве устройств и отраслей, включающих в себя роботов, весы, процессы разработки и производства, испытание безопасности и испытание производительности. Во многих случаях является желательным использовать датчик усилия, который обеспечивает долговременную надежность и высокую чувствительность.
[002] В целом, традиционные датчики усилия выбираются на основе операционного окружения и типов усилий, которые должны быть измерены. Это ведет к многообразию различных датчиков усилия, имеющих различные номинальные емкости (например, максимальное измеряемое усилие) и относящиеся к окружению зависимости, включающие в себя температуру, влажность, давление, изменения электрической мощности и радиочастотные помехи.
[003] Кроме того, эти традиционные датчики усилия физически соединяются со структурой для того, чтобы испытывать то же усилие, что и структура. Это может делать установку традиционных датчиков усилия трудной, особенно при изменении усилий в большом диапазоне или в небольших структурах. Традиционные датчики усилия также ограничиваются измерением усилий вдоль главной оси, которая может не совпадать с направлением суммарного приложенного усилия. По существу, может требоваться множество датчиков усилия, чтобы измерять различные направления усилия, что увеличивает размер и сложность системы считывания усилия.
Сущность изобретения
[004] Этот документ описывает способы и системы для радиолокационного считывания усилия. Эти способы и устройства могут точно характеризовать усилие, прикладываемое к отражающей поверхности. Радиолокационное считывание усилия может измерять множество усилий изменяющейся величины и направления во множестве операционных окружений. Эти характеристики могут быть использованы, чтобы предоставлять данные об усилии вычислительному устройству. В некоторых аспектах данные об усилии могут быть использованы для управления вычислительным устройством.
[005] приведено для представления упрощенных концепций, касающихся радиолокационного считывания усилия, которые дополнительно описываются ниже в подробном описании. Данное краткое изложение сущности изобретения не предназначено ни для идентификации неотъемлемых признаков заявленного изобретения, ни для использования при определении объема заявленного изобретения.
Краткое описание чертежей
[006] Варианты осуществления способов и устройств для радиолокационного считывания усилия описываются со ссылкой на последующие чертежи. Одинаковые номера используются повсюду на чертежах, чтобы указывать похожие признаки и компоненты:
Фиг. 1 иллюстрирует примерное окружение, в котором радиолокационное считывание усилия может быть реализовано.
Фиг. 2 иллюстрирует систему радиолокационного считывания усилия подробно.
Фиг. 3 иллюстрирует примерные конфигурации системы радиолокационного считывания усилия.
Фиг. 4 иллюстрирует примерные усилия, которые система радиолокационного считывания усилия может измерять.
Фиг. 5 иллюстрирует примерные движущие усилия, которые система радиолокационного считывания усилия может измерять.
Фиг. 6 иллюстрирует примерный способ для калибровки измерения усилия.
Фиг. 7 иллюстрирует примерный способ для предоставления возможности лучшего распознавания усилия.
Фиг. 8 иллюстрирует примерный способ, предоставляющий возможность радиолокационного считывания усилия.
Фиг. 9 иллюстрирует примерную вычислительную систему, которая осуществляет или в которой могут быть реализованы способы, которые предоставляют возможность использования, радиолокационного считывания усилия.
Подробное описание изобретения
Обзор
[007] Данный документ описывает способы и устройства для радиолокационного считывания усилия. Эти способы и устройства предоставляют возможность значительного охвата усилий и использований для этих усилий, таких как усилия для использования, управления и взаимодействия с различными устройствами, от смартфонов до холодильников. Способы и устройства являются приспособленными для предоставления радиолокационного поля, которое может измерять усилия с помощью относительно небольших радиолокационных систем, даже тех, которые могут быть включены в небольшие устройства. Кроме того, эти усилия могут быть точно измерены без необходимости в большом количестве мощности, аппаратных средств, которые могут изнашиваться со временем, или особых операционных окружений.
[008] Этот документ теперь обращается к примерному окружению, после которого описываются примерные радиолокационные системы измерения усилий, примерные способы и примерная вычислительная система.
Примерное окружение
[009] Фиг. 1 является иллюстрацией примерного окружения 100, в котором способы, использующие, и аппаратуру, включающее в себя, систему 102 радиолокационного считывания усилия, могут быть осуществлены. Вариант осуществления 100 включает в себя три устройства и способа для использования системы 102 радиолокационного считывания усилия. В первом примере система 102 радиолокационного считывания усилия является встроенной в периферийное устройство, такое как клавиатура 106-1 и компьютерная мышь 106-2, и предоставляет возможность усилию, прикладываемому к периферийному устройству, взаимодействовать с настольным компьютером 104-1. Во втором примере система 102 радиолокационного считывания усилия предоставляет возможность усилию, прикладываемому к внешней стороне планшета 104-2, взаимодействовать с планшетом 104-2.
[0010] Клавиатура 106-1 и компьютерная мышь 106-2 ассоциированы с системой 102 радиолокационного считывания усилия, и эти устройства работают вместе, чтобы улучшать взаимодействие пользователя с настольным компьютером 104-1. Внешняя сторона клавиатуры 106-1 и компьютерной мыши 106-2 может быть гладкой, гибкой и непрерывной с графическими изображениями, которые очерчивают области, где традиционные клавиши или кнопки будут существовать. Внутри клавиатуры 106-1 и компьютерной мыши 106-2 система 102 радиолокационного считывания усилия предоставляет радиолокационное поле 108, которое отражается от отражающей поверхности 112 внешней стороны клавиатуры 106-1 и компьютерной мыши 106-2.
[0011] Пользователь взаимодействует с настольным компьютером 104-1, прикладывая усилие 110 к отражающей поверхности 112. Прикладываемое усилие 110 вызывает деформацию 114, которую система 102 радиолокационного считывания усилия обнаруживает и использует, чтобы измерять характеристики усилия 110 (например, величину, местоположение, направление, перемещение). Характеристики усилия затем ассоциируются с пользовательским вводом и сообщаются настольному компьютеру 104-1. Таким образом, пользователь может выполнять набор, нажимая различные области на клавиатуре 106-1, или прокрутку, перемещая палец по компьютерной мыши 106-2.
[0012] Характеристики усилий расширяют типы вводов, которые пользователь может предоставлять для взаимодействия с настольным компьютером 104-1. Например, большее усилие (например, более жесткое нажатие) на клавиатуру 106-1 может быть использовано, чтобы автоматически заменять прописным набранный символ. На компьютерной мыши 106-2 горизонтальное перемещение пальца по поверхности может инструктировать настольному компьютеру 104-1 выполнять горизонтальную прокрутку по документу или перемещать курсор. Компьютерная мышь 106-2 может также быть наклонена в направлении, чтобы перемещать курсор или регулировать настройку масштаба на настольном компьютере 104-1. В некоторых случаях клавиатура 106-1 может предоставлять множество функций, таких как трековая мышь или панель для рисования.
[0013] Усилия могут также быть настроены для каждого пользователя. Пользователи с руками различных размеров могут настраивать клавиатуру 106-1 для эргономического комфорта, ассоциируя различные местоположения на отражающей поверхности 112 с различными клавишами. Пользователи с более легким прикосновением могут настраивать чувствительность клавиатуры 106-1 так, что меньшее по величине усилие может быть приложено. Дополнительно, одинаковое усилие может быть использовано для различных управляющих воздействий, таких как предоставление возможности пользователю настраивать компьютерную мышь 106-2 для праворукого или леворукого пользователя.
[0014] Аналогично, рассмотрим внешний вид планшета 104-2, который включает в себя экран отображения и/или корпус, который может деформироваться. Отражающая поверхность 112 может быть внутренней поверхностью или отдельным слоем под внешней стороной планшета 104-2. Система 102 радиолокационного считывания усилия может быть встроена внутрь планшета 104-2, чтобы обнаруживать эти деформации, предоставляя возможность управления планшетом 104-2 без физических кнопок или традиционной технологии сенсорного экрана. Обнаруживая и измеряя усилия, оказываемые на планшет 104-2, система радиолокационного считывания усилия может обнаруживать, присутствует ли пользователь и удерживает ли планшет 104-2. Кроме того, физическая ориентация планшета 104-2 может быть определена на основе поверхностей, которые пользователь удерживает, или посредством измерения гравитационных сил, которые вынуждают чувствительную массу деформировать другую отражающую поверхность. Во многих аспектах система 102 радиолокационного считывания усилия может заменять множество различных датчиков, которые предоставляют эти признаки, включающих в себя камеры, гироскопы и акселерометры.
[0015] Система 102 радиолокационного считывания усилия может взаимодействовать с приложениями или операционной системой вычислительного устройства 104 или удаленно по сети связи, передавая входные данные, ассоциированные с измеренными усилиями. Усилия могут быть соотнесены с различными приложениями и устройствами, тем самым, предоставляя возможность управления множеством устройств и приложений. Множество сложных и уникальных усилий может быть распознано посредством системы 102 радиолокационного измерения усилия, включающих в себя усилия, которые являются небольшими, большими, непрерывными, дискретными, движущимися, неподвижными, в единственном местоположении и во множестве местоположений. Система 102 радиолокационного считывания усилия, объединенная ли с вычислительным устройством 104, имеющая вычислительные способности или имеющая немного вычислительных возможностей, может, каждая, быть использована для взаимодействия с различными устройствами и приложениями.
[0016] Примерные системы радиолокационного считывания усилия иллюстрируются на фиг. 1, в которых пользователь может предоставлять сложные или простые усилия с помощью его или ее тела, пальца, пальцев, руки или рук (или устройства типа пера), чтобы вынуждать отражающую поверхность 112 деформироваться. Примерные усилия включают в себя множество усилий, используемых с текущими чувствительными к касаниям дисплеями, таких как смахивания, сжатие двумя пальцами, разведение, поворот, постукивание и т.д. Другие усилия разрешаются, которые являются сложными или простыми, но трехмерными. Примеры включают в себя нестационарные усилия, вызванные писанием или рисованием на отражающей поверхности 112, усилия различной величины, вызванные нажатием слегка или сильно по отражающей поверхности 112, и усилия различных размеров, вызванные нажатием одним пальцем или всей рукой по отражающей поверхности 112. В дополнение к усилиям, вызванным пользователем, система радиолокационного измерения усилия может также измерять усилия, созданные гравитацией, звуковыми волнами и механическими колебаниями. Они являются лишь несколькими из множества усилий, которые могут быть считаны, также как соотнесены с конкретными устройствами или приложениями, например, чтобы аутентифицировать пользователя, обнаруживать присутствие пользователя, включать (например, пробуждать) устройство, предоставлять число физических шагов для фитнесс-приложения и обнаруживать ориентацию устройства.
[0017] Более подробно, рассмотрим фиг. 2, которая иллюстрирует систему 102 радиолокационного считывания усилия как часть вычислительного устройства 104. Вычислительное устройство 104 иллюстрируется с различными неограничивающими примерными устройствами, включающими в себя отмеченный настольный компьютер 104-1, планшет 104-2, также как портативный компьютер 104-3, смартфон 104-4, чаша весов 104-5, вычислительные часы 104-6, микроволновая печь 104-7 и видеоигровой контроллер 104-8. Вычислительное устройство 104 может также включать в себя шумоподавляющие наушники 104-9, которые используют систему 102 радиолокационного считывания усилия, чтобы измерять вибрации, вызванные шумом в окружении, для определения шумоподавляющего поля. Вычислительное устройство 104 может также включать в себя робота 104-10, который использует систему 102 радиолокационного считывания усилия, чтобы измерять усилие захвата и предоставлять обратную связь для регулирования величины усилия, которое робот прикладывает. Таким образом, робот может удерживать предмет без ломания или падения предмета. Другие устройства могут также быть использованы, такие как тактильные перчатки, телевизоры, клавиатуры электропианино, антропоморфические испытательные устройства (такие как манекены для испытания ударом транспортного средства), трекпады, панели для рисования, нетбуки, электронные книги, датчики давления в шинах, акселерометры, системы автоматизации и контроля дома, другие бытовые приборы, системы безопасности и испытательные системы. Отметим, что вычислительное устройство 104 может быть носимым, неносимым, но мобильным или относительно немобильным (например, настольные компьютеры и приборы).
[0018] Система 102 радиолокационного считывания усилия может быть использована как автономный датчик усилия или использована с, или встроена в, множество различных вычислительных устройств или периферийных устройств, таких как в панелях управления, которые управляют домашними приборами и системами, в автомобилях для управления внутренними функциями (например, громкостью звука, системой "круиз-контроль" или даже вождением автомобиля) или в качестве присоединения к портативному компьютеру для управления вычислительными приложениями на портативном компьютере.
[0019] Вычислительное устройство 104 включает в себя один или более компьютерных процессоров 202 и компьютерно-читаемых носителей 204, которые включают в себя носители памяти и носители хранения. Приложения и/или операционная система (не показана), осуществленная как компьютерно-читаемые инструкции на компьютерно-читаемых носителях, могут исполняться компьютерными процессорами 202, чтобы обеспечивать некоторые из функциональных возможностей, описанных в данном документе. Компьютерно-читаемые носители 204 также включают в себя диспетчер 206 считывания усилия, который может реализовывать соотнесение 208 усилия с управлением. Соотнесение 208 усилия с управлением может распознавать приложенное усилие 110 и соотносить приложенное усилие 110 с предварительно сконфигурированным управляющим воздействием, ассоциированным с приложением на вычислительном устройстве 104. Диспетчер 206 считывания усилия может также предоставлять пользователям возможность настраивать усилия для различных управляющих воздействий и калибровать систему 102 радиолокационного считывания усилия.
[0020] Вычислительное устройство 104 может также включать в себя сетевой интерфейс 210 для передачи данных по проводным, беспроводным или оптическим сетям. Например, сетевой интерфейс 210 может передавать данные по локальной вычислительной сети (LAN), беспроводной локальной вычислительной сети (WLAN), персональной вычислительной сети (PAN), глобальной вычислительной сети (WAN), интрасети, Интернету, одноранговой сети, сети прямой связи, смешанной сети и т.п. Вычислительное устройство 104 может также включать в себя дисплей (не показан).
[0021] Вычислительное устройство 104, или другое устройство, которое ассоциируется с вычислительным устройством 104, включает в себя отражающую поверхность 112, посредством которой прикладываемые усилия могут быть считаны посредством системы 102 радиолокационного считывания усилия. Отражающая поверхность 112 может быть выполнена из любого типа материала, такого как резина, полиэтилен, ткани, алюминий, сталь, стекло и дерево. Что касается материалов, которые с трудом отражают радиолокационное поле 108, отражающий материал (например, алюминий, медь, золото, серебро или их сочетание) может быть применен (например, нанесен, напылен, отлит, соткан) к отражающей поверхности 112. В некоторых аспектах отражающий материал, или отсутствие отражающего материала, может быть сконфигурировано в особых точках на протяжении отражающей поверхности 112, чтобы предоставлять возможность системе 102 радиолокационного считывания усилия отслеживать эти точки и обнаруживать деформацию 114 на основе этих точек. Гибкий или растягиваемый материал может быть использован для отражающей поверхности 112, чтобы предоставлять пользователю ощущение касания. Многочисленные жесткие сегменты могут также быть присоединены и сконфигурированы, чтобы перемещаться на основе приложенного усилия 110. Отражающая поверхность 112 может дополнительно преувеличивать деформацию, чтобы предоставлять возможность легко обнаруживать небольшие усилия посредством системы 102 радиолокационного считывания усилия.
[0022] Деформируемый слой, который является прозрачным для радиолокационного поля 108, может быть расположен между отражающей поверхностью 112 и радиолокационной системой 102 считывания усилия. Деформируемый слой может включать в себя воздух, воздушный пузырек, силикон, пеноматериал, конформную решетчатую структуру и/или пружину. Деформируемый слой может быть сконфигурирован, чтобы разделять отражающую поверхность 112 и систему 102 радиолокационного считывания усилия, чтобы предоставлять возможность отражающей поверхности 112 деформироваться.
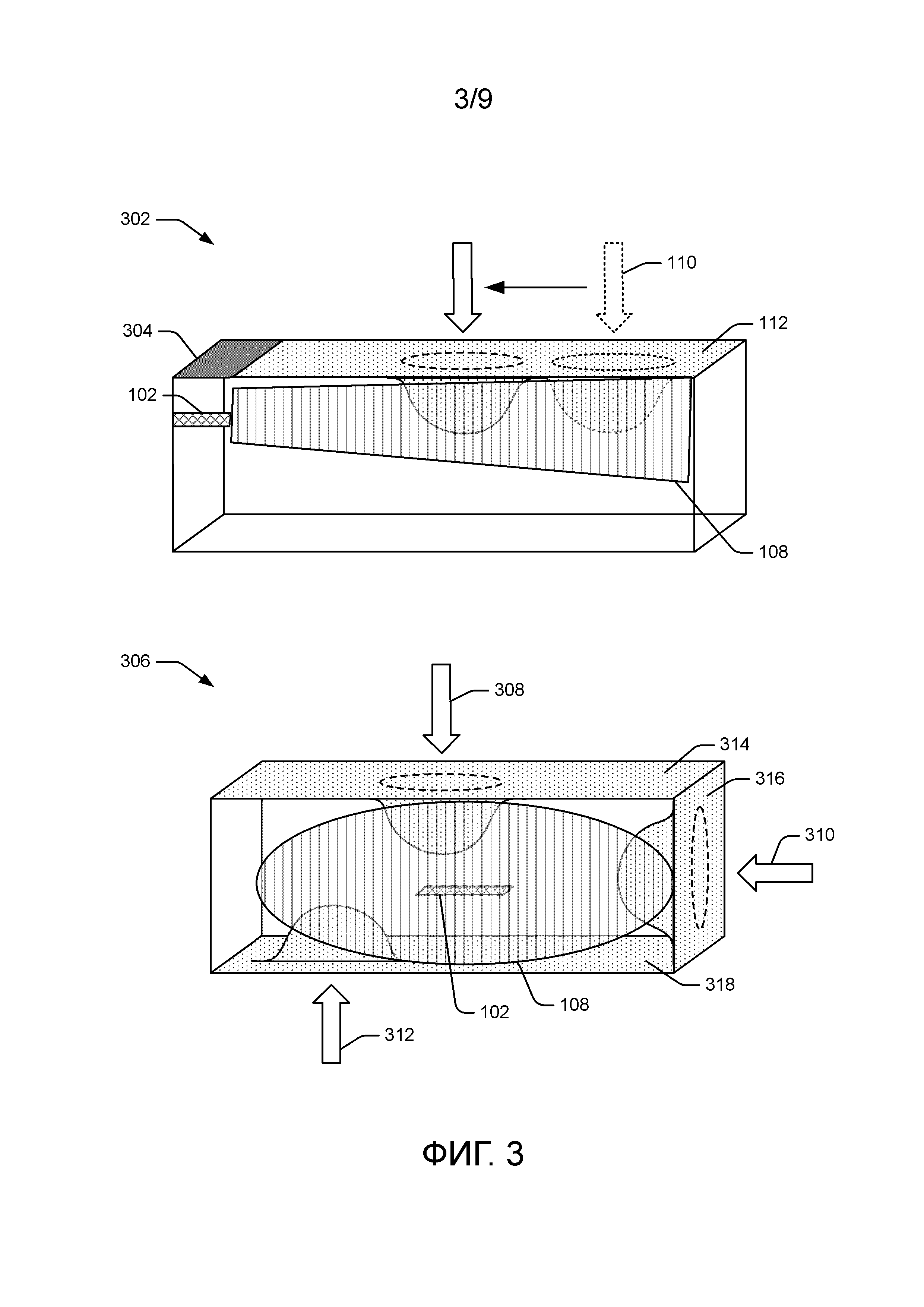
[0023] В зависимости от применения система 102 радиолокационного считывания усилия может быть расположена значительно ниже отражающей поверхности 112, чтобы проецировать радиолокационное поле 108 вверх по направлению к отражающей поверхности 112, как изображено на фиг. 1. Фиг. 3 изображает другую конфигурацию по ссылке 302, в которой система 102 радиолокационного считывания усилия располагается относительно стороны отражающей поверхности 112. Таким образом, радиолокационное поле 108 проецируется сквозь отражающую поверхность 112. Эта конфигурация может быть использована, чтобы непосредственно измерять перемещение прикладываемого усилия 110 посредством измерения доплеровского сдвига частоты в принимаемых отражениях. В некоторых аспектах, вместо отражающей поверхности 112, жесткая поверхность 304, которая с трудом деформируется, может быть расположена над системой 102 радиолокационного считывания усилия. Фиг. 3 включает в себя дополнительную конфигурацию по ссылке 306, в которой система 102 радиолокационного считывания усилия является всенаправленным радиолокатором, который проецирует радиолокационное поле 108 во всех направлениях, чтобы измерять множество усилий 308, 310 и 312 на множестве отражающих поверхностей 314, 316 и 318.
[0024] Обращаясь к фиг. 2, система 102 радиолокационного считывания усилия включает в себя антенну 212 и приемопередатчик 214, чтобы предоставлять радиолокационное поле 108 (например, передавать и принимать радиолокационные сигналы). Радиолокационное поле 108 может быть непрерывным полем или полем со сканированием луча, управляемым или неуправляемым полем, широким или узким полем или имеющим форму полем (например, полусферой, кубом, веером, конусом, цилиндром). Форма и направление поля могут быть достигнуты с помощью способов цифрового формирования диаграммы направленности и сконфигурированы на основе размера отражающей поверхности 112 или расчетного местоположения деформации 114. Таким образом, система радиолокационного считывания усилия может легко обнаруживать усилия в широком диапазоне или в отдельных областях (например, на двух противоположных сторонах устройства). В некоторых аспектах множество антенн и приемопередатчиков может быть расположено в различных местоположениях, чтобы наблюдать за разными областями или одной и той же областью.
[0025] Диапазон системы 102 радиолокационного считывания усилия может быть сконфигурирован на основе расстояния до отражающей поверхности 112, например, между одним миллиметром и 30 метрами. Это расстояние может быть дополнительно основано на том, на какую величину отражающая поверхность 112 конфигурируется деформироваться, чтобы гарантировать, что система 102 радиолокационного считывания усилия может обнаруживать деформацию 114 без повреждения посредством деформации 114.
[0026] Система 102 радиолокационного считывания усилия может быть сконфигурирована для непрерывных волновых или импульсных радиолокационных операций. Множество модуляций может быть использовано, включающих в себя линейную частотную модуляцию (FM), ступенчатые частотные модуляции и фазовые модуляции. Система 102 радиолокационного считывания усилия может быть сконфигурирована, чтобы испускать микроволновое излучение в диапазоне 1-300 ГГц, диапазоне 3-100 ГГц и более узких диапазонах, таких как 57-63 ГГц, чтобы предоставлять радиолокационное поле 108. Частота может быть выбрана на основе отражающих характеристик отражающей поверхности 112. Система 102 радиолокационного считывания усилия может также быть сконфигурирована, чтобы иметь относительно быструю скорость обновления, которая может помогать в считывании усилий короткой продолжительности, также как активном формировании деформации 114. С помощью модуляции и способов цифрового формирования диаграммы направленности система 102 радиолокационного считывания усилия может обеспечивать высокое разрешение диапазона и высокое разрешение перекрещивающейся линии, чтобы измерять небольшие усилия, прикладываемые к отражающей поверхности (например, обеспечивать высокую чувствительность). Таким образом, система 102 радиолокационного считывания усилия может обнаруживать деформации порядка от метров до микрометров.
[0027] Система 102 радиолокационного считывания усилия может также включать в себя один или более системных процессоров 216 и системных носителей 218 (например, один или более компьютерно-читаемых носителей хранения). Системные носители 218 включают в себя диспетчер 220 системы, который может обрабатывать принимаемые отражения. Диспетчер 220 системы может обнаруживать деформацию 114 и создавать данные об усилии, которые характеризуют прикладываемое усилие 110, на основе обнаруженной деформации 114 (описано более подробно ниже). Данные об усилии могут быть в форме минимально обработанных синфазных или сдвинутых по фазе на 90 градусов данных, картами доплеровского диапазона и/или измеренными характеристиками прилагаемого усилия 110 (например, местоположением, величиной, направлением, перемещением). Способы радиолокационного исследования и отслеживания могут также быть реализованы посредством диспетчера 220 системы, чтобы обнаруживать деформацию 114. В некоторых аспектах диспетчер 220 системы может управлять характеристиками радиолокационного поля 108 посредством отправки команд приемопередатчику. Кроме того, эти команды могут быть основаны на информации, принятой от вычислительного устройства 104, например, когда диспетчер 206 считывания усилия предоставляет возможность пользователю предоставлять усилие, чтобы индивидуально настраивать управление вычислительным устройством 104.
[0028] Система 102 радиолокационного считывания усилия также включает в себя интерфейс связи, сконфигурированный, чтобы передавать данные об усилии удаленному устройству, хотя это нет необходимости использовать, когда система 102 радиолокационного считывания усилия объединена с вычислительным устройством 104. Когда содержатся, данные об усилии могут быть предоставлены в формате, используемом удаленным вычислительным устройством, достаточным для того, чтобы удаленное вычислительное устройство измерило характеристики прикладываемого усилия 110 в тех случаях, когда характеристики не определяются посредством системы 102 радиолокационного считывания усилия или вычислительного устройства 104.
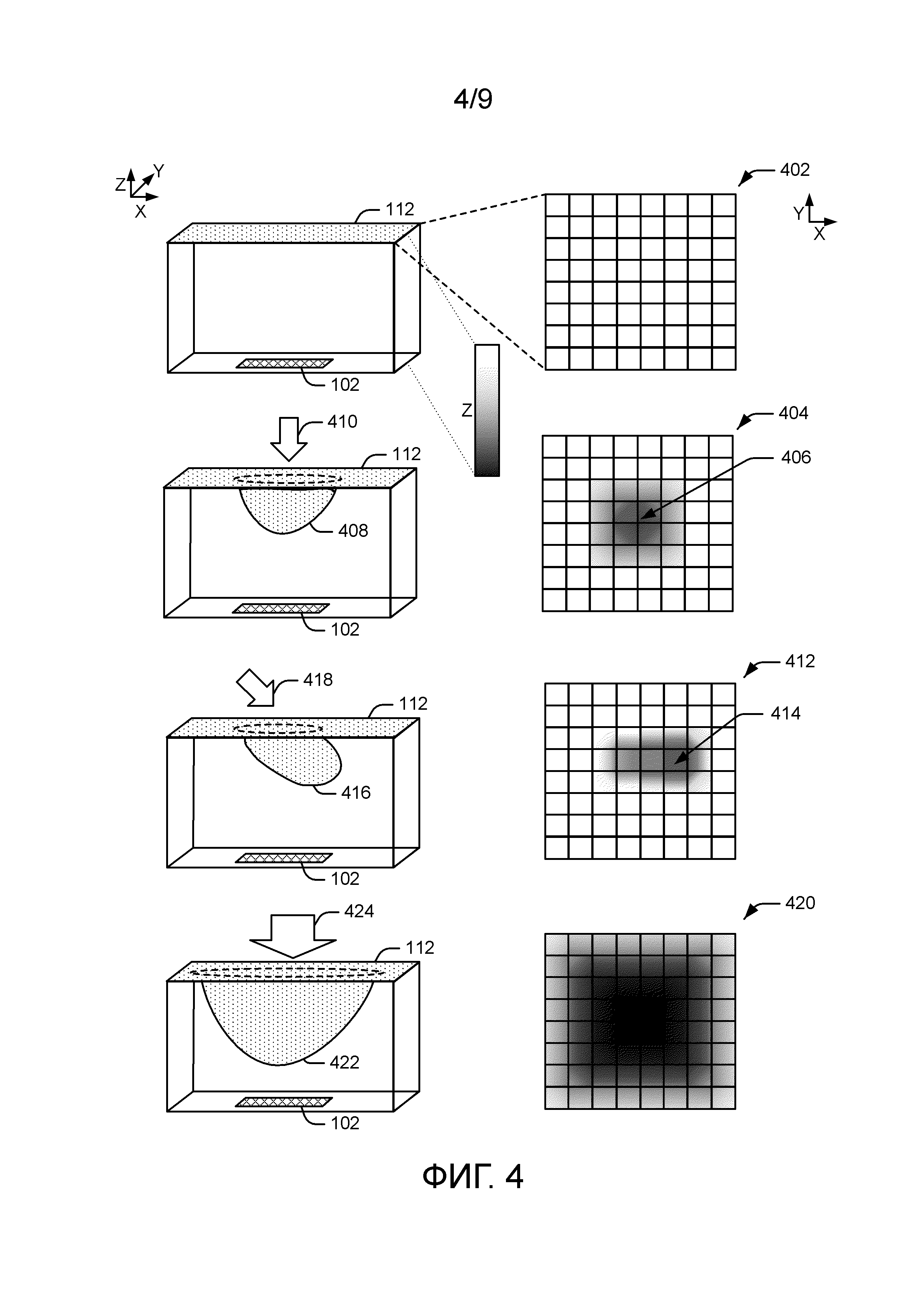
[0029] Фиг. 4 иллюстрирует примерные усилия, которые система 102 радиолокационного считывания усилия может измерять. В целях объяснения, изображенные усилия вынуждают отражающую поверхность 112 деформироваться внутрь в направлении системы 102 радиолокационного считывания усилия. Другие усилия могут также быть измерены, которые вынуждают отражающую поверхность 112 деформироваться наружу, сгибаться, скручиваться, растягиваться и сжиматься. Дополнительно, изображенные деформации являются преувеличенными в иллюстративных целях.
[0030] На фиг. 4 примерные усилия и деформации показаны с соответствующими картами отражающей поверхности 112. Карты могут быть сформированы диспетчером 220 системы посредством анализа отраженных радиолокационных сигналов и измерения расстояния отраженной поверхности 112 (например, диапазона) по различному азимуту и областям высоты подъема. Карты иллюстрируют плоскостные (например, X и Y) и вертикальное (например, Z) измерения отражающей поверхности 112, где линии координатной сетки представляют подобласти на отражающей поверхности 112. Затенение карты представляет расстояние (например, диапазон) отражающей поверхности 112 в этих подобластях относительно системы радиолокационного считывания усилия, так что более близкие расстояния указываются более темным затенением, а более дальние расстояния указываются более светлым затенением. Длина и ширина отражающей поверхности 112 могут также быть измерены и иллюстрированы посредством карты, чтобы измерять усилия, которые вынуждают отражающую поверхность 112 расширяться или сокращаться.
[0031] Карта 402 иллюстрирует начальный уровень, когда внешнее усилие не прикладывается к отражающей поверхности 112. Этот начальный уровень может быть использован для измерения дефектов и естественных деформацией в отражающей поверхности 112, так что диспетчер 220 системы или диспетчер 206 считывания усилия может учитывать их в позже собираемых данных об усилии. Как изображено, карта 402 иллюстрирует, что отражающая поверхность 112 является плоской без изменения в вертикальном измерении (например, без изменения в глубине отражающей поверхности 112).
[0032] Карта 404 изображает изменение в глубине отражающей поверхности 112 в подобласти 406. Изменение ассоциируется с деформацией 408, которая вызывается усилием 410. Максимальная глубина деформации 408 ассоциируется с величиной усилия 410, предоставляя возможность диспетчеру 220 системы определять величину усилия 410. Величина может быть дополнительно определена на основе калибровочной информации для того, чтобы предоставлять величину в традиционных единицах измерения (например, ньютонах, фунтах, граммах). Дополнительно, величина может быть определена на основе различия между максимальной глубиной в подобласти 406 и эталонной глубиной, такой как номинальная глубина или ранее измеренная глубина для одной и той же подобласти на отражающей поверхности 112 (например, с помощью карты 402).
[0033] Карта 412 изображает изменение в глубине отражающей поверхности 112 в подобласти 414. Изменение ассоциируется с деформацией 416, которая вызывается усилием 418. Карта 412 иллюстрирует, что в дополнение к величине измеряемого усилия 418 направление (например, угол относительно отражающей поверхности 112) усилия 110-2 может быть измерено посредством анализа изменения в глубине по отражающей поверхности 112. Как видно на карте 404, изменение в глубине является симметричным относительно максимальной глубины по ссылке 406. Напротив, карта 412 показывает глубину, постепенно уменьшающуюся влево от максимальной глубины по ссылке 414. Уклон, с которым глубина изменяется, может быть использован для измерения угла усилия 418 (например, 45 градусов).
[0034] Карта 420 изображает данные об усилии, ассоциированные с деформацией 422, которая вызывается усилием 424. В сравнении карты 420 с картами 404 и 412 величина усилия 424 является большей по сравнению с величиной усилия 410 и усилия 418, так как расстояние между системой 102 радиолокационного считывания усилия и деформацией 422 является меньшим. Кроме того, другой измеренной характеристикой усилия 424 является размер области на отражающей поверхности 112, относительно которой прикладывается усилие. На карте 420 размер деформации 422 является большим по сравнению с картами 404 и 412, так как усилие 424 прикладывается относительно большей области.
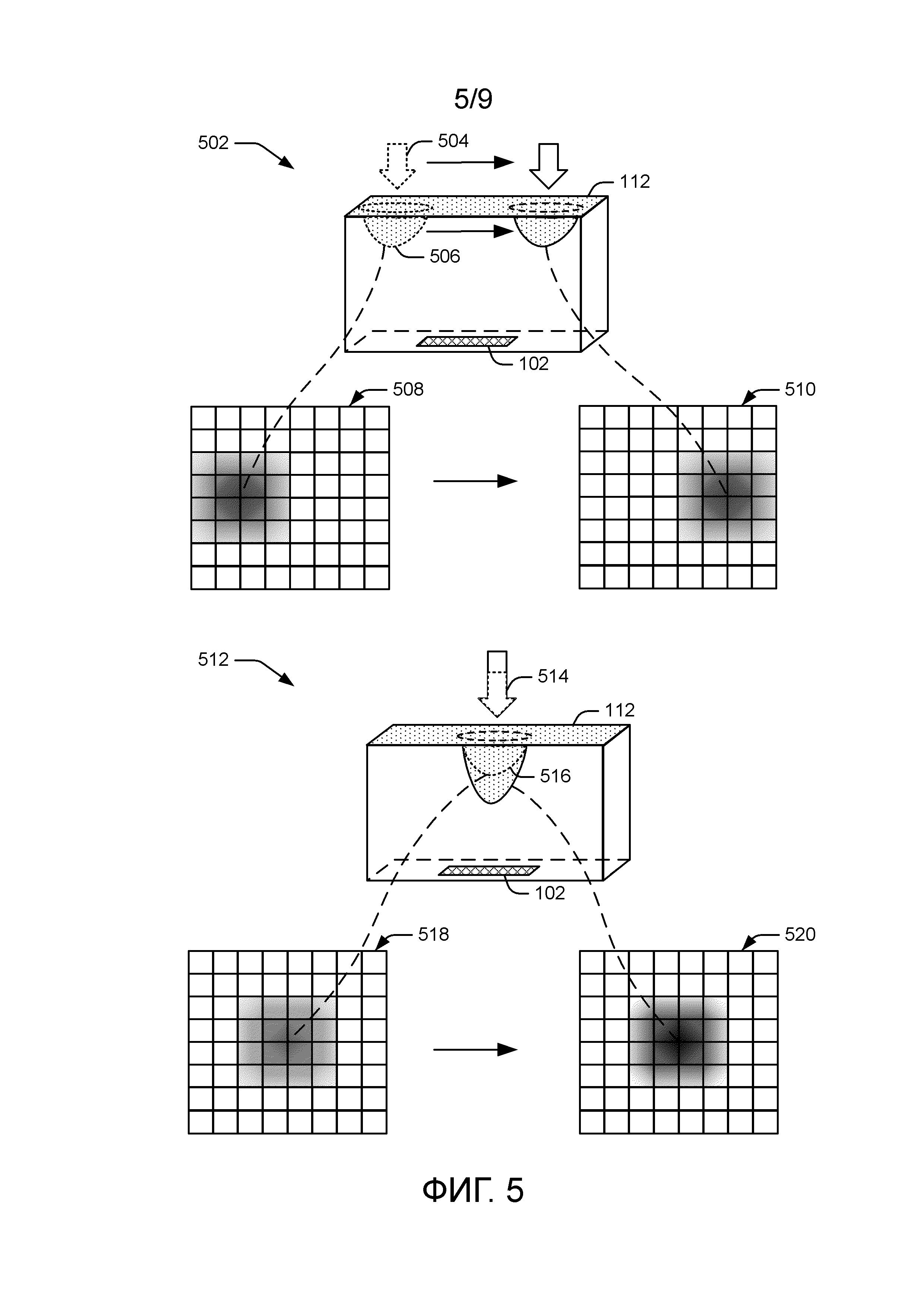
[0035] Фиг. 5 иллюстрирует примерные движущие усилия, которые система 102 радиолокационного считывания усилия может измерять. По ссылке 502, усилие 504 и деформация 506 перемещаются вправо по отражающей поверхности 112. Система радиолокационного считывания усилия может создавать карту 508 и карту 510 в различные моменты времени. Скорость усилия 504 может быть измерена как изменение в расстоянии (например, различие в местоположении максимальной глубины на карте 508 и карте 510) с изменением по времени.
[0036] По ссылке 512, усилие 514 увеличивается по величине, вынуждая деформацию 516 увеличиваться по глубине. Темп, с которым усилие 514 увеличивается, может быть измерен с помощью способа, описанного выше, посредством измерения изменения по глубине со временем. Дополнительно, система радиолокационного считывания усилия может измерять доплеровский сдвиг частоты в принятых отраженных сигналах, чтобы измерять темп, с которым величина усилия 514 изменяется.
[0037] Как описано выше, система 102 радиолокационного считывания усилия может предоставлять множество карт, иллюстрирующих промежуток времени для различных прикладываемых усилий или изменений в прикладываемых усилиях. Эти данные об усилии могут быть сохранены для автономного анализа или использованы, чтобы предоставлять обратную видеосвязь в реальном времени пользователю. Эти способы могут быть дополнительно использованы, чтобы определять частоту возникновения прикладываемого усилия, также как измерять вибрации отражающей поверхности 112.
Примерные способы
[0038] Фиг. 6, 7 и 8 изображают способы, предоставляющие возможность радиолокационного считывания усилия. Способ 600 может быть выполнен, чтобы калибровать измерение прикладываемого усилия. Способ 700 может быть выполнен, чтобы лучше предоставлять возможность последующего распознавания прикладываемого усилия. Способ 800 предоставляет возможность считывания усилия и может быть выполнен отдельно от или объединен в целом или частично со способом 600 и способом 700. Эти способы и другие способы в данном документе показаны как множества операций (или действий), выполняемых, но необязательно ограниченных порядком или сочетаниями, в которых операции показаны в данном документе. Дополнительно, любая из одной или более операций может быть повторена, объединена, повторно организована или связана, чтобы предоставлять широкий спектр дополнительных и/или альтернативных способов. В фрагментах последующего обсуждения ссылка может быть выполнена на окружение 100 на фиг. 1 и объекты, детализированные на фиг. 2, ссылка на которые выполняется только для примера. Способы не ограничиваются выполнением посредством одного объекта или множества объектов, работающих на одном устройстве.
[0039] Способ 600 предоставляет возможность калибровки для радиолокационного считывания усилия. Калибровка предоставляет возможность системе 102 радиолокационного считывания усилия измерять прикладываемое усилие в традиционных единицах измерения, таких как ньютоны, фунты и граммы. Дополнительно, калибровочная информация предоставляет возможность настройки системы 102 радиолокационного считывания усилия для различных отражающих поверхностей, дефектов или естественных деформаций в отражающей поверхности и/или существования других предметов в радиолокационном поле.
[0040] На этапе 602 калибровочная информация, ассоциированная с прилагаемым усилием, принимается. Диспетчер 206 считывания усилия может предлагать пользователю предоставить калибровочную информацию, такую как текст: "введите вес". Альтернативно, калибровочная информация может быть сохранена на компьютерно-читаемых носителях 204 и считана диспетчером 206 считывания усилия.
[0041] Необязательно на этапе 604 базовые данные об усилии могут быть сформированы, когда дополнительное усилие не прикладывается к отражающей поверхности 112. Диспетчер 206 считывания усилия может командовать системе 102 радиолокационного считывания усилия измерять базовые данные об усилии. Базовые данные об усилии улучшают точность системы 102 радиолокационного считывания усилия, предоставляя возможность учитывать дефекты и естественные деформации в отражающей поверхности 112 в позднее измеряемых данных об усилии. Во время сбора базовых данных система радиолокационного измерения усилия может также обнаруживать предметы, которые не являются интересующими, но существуют в радиолокационном поле 108. Эти предметы могут быть добавлены в карту помех, чтобы предоставлять возможность системе автоматически определять ограничения и пороговые значения (например, минимальную доплеровскую частоту, минимальный диапазон, физический диапазон), которые отличают эти предметы, и смягчать влияние, которые эти предметы имеют на данные об усилии. Эти ограничения и пороговые значения могут также быть предварительно определены и предоставлены системе радиолокационного считывания усилия во время установки или во время процесса калибровки. Диспетчер 206 считывания усилия может записывать базовые данные об усилии для последующей ссылки.
[0042] На этапе 606 данные об усилии, ассоциированные с прилагаемым усилием, принимаются. Эти данные об усилии могут затем быть записаны в качестве помощи улучшению соотнесения позднее принимаемых данных об усилии с калибровочной информацией, так как способ, которым отражающая поверхность 112 деформируется, может изменяться в зависимости от типа материала (например, гибкий или жесткий), операционного окружения (например, различные температуры или атмосферы) или области на отражающей поверхности 112 (например, в середине или на крае). Диспетчер 206 считывания усилия может инструктировать системе 102 радиолокационного считывания усилия предоставлять радиолокационное поле, принимать отражение от отражающей поверхности, имеющей деформацию, вызванную прикладываемым усилием, и формировать данные об усилии на основе обнаруженной деформации.
[0043] На этапе 608 принятые данные об усилии соотносятся с калибровочной информацией. Это соотнесение может быть таким простым как таблица поиска, которая соотносит измеренные характеристики усилия с калибровочной информацией. Например, глубина деформации может быть соотнесена с весом объекта на отражающей поверхности. Дополнительно, соотнесение может включать в себя дополнительную информацию, которая может быть использована, чтобы оценивать точность измерения и компенсировать кратковременные колебания, такие как соотношения сигнал-шум и уровни шума. Соотнесение может включать в себя данные об усилии, которые являются минимально обработанными (например, карты отражающей поверхности 112, которые показаны на фиг. 3 и фиг. 4, синфазные и сдвинутые по фазе на 90° данные, карты доплеровского диапазона), или измеренные характеристики усилия (например, местоположение, величина, направление, перемещение).
[0044] На этапе 610 соотнесение данных об усилии и калибровочной информации записывается для последующего использования. Все или части данных об усилии могут быть записаны для соотнесения, такие как законченная карта отражающей поверхности или несколько измеренных характеристик прикладываемого усилия, которые относятся к калибровочной информации. Запись предоставляет возможность ассоциирования позже прикладываемого усилия с калибровочной информацией. Например, величина позже прикладываемого усилия, хотя измеряется относительно глубины деформации, может быть измерена в единицах фунтов.
[0045] На этапе 612 калибровочная информация может быть отображена в ответ на измерение позднее прикладываемого усилия. Например, весы 104-5 на фиг. 2 могут отображать измеренный вес предмета, вынуждающего отражающую поверхность 112 деформироваться на основе измеренной глубины деформации и соотнесения, которое ассоциирует позже прикладываемое усилие с калибровочной информацией.
[0046] Операции могут быть повторены, чтобы предоставлять множество ссылок, относящихся к различной калибровочной информации, на различные данные об усилии. Диспетчер 206 считывания усилия может использовать множество ссылок для экстраполяции или интерполяции, чтобы оценивать калибровочную информацию, ассоциированную с позже прикладываемым усилием. Дополнительно, так как способ, которым отражающая поверхность 112 деформируется, может изменяться в зависимости от типа материала (например, гибкий или жесткий), операционного окружения (например, различные температуры или атмосферы), или области на отражающей поверхности 112 (например, в середине или на крае), операции могут повторяться, чтобы относить различные данные об усилии к одной и той же калибровочной информации. Таким образом, система 102 радиолокационного считывания усилия может быть откалибрована относительно отражающей поверхности и множества операционных окружений.
[0047] Процесс калибровки, описанный выше, улучшает точность системы радиолокационного считывания усилия посредством формирования данных об усилии, которые могут быть использованы, чтобы непосредственно учитывать различные характеристики деформации отражающей поверхности 112, без сложного моделирования или усовершенствованной имитации. Другие способы калибровки могут также быть использованы, чтобы предоставлять системе радиолокационного считывания усилия возможность измерять характеристики усилия в традиционных единицах измерения, таких, которые предоставляют непосредственное соотнесение между различными глубинами деформации и величинами усилия.
[0048] Способ 700 предоставляет возможность улучшения распознавания для позже прикладываемого усилия. На этапе 702 человек, которому разрешено управлять вычислительным устройством, аутентифицируется. Эта аутентификация может быть выполнена различными способами, известными в области техники для аутентификации людей, как правило, такими как прием аутентификационных регистрационных данных и подтверждение того, что эти регистрационные данные соответствуют человеку.
[0049] В некоторых случаях, однако, аутентификация человека, которому разрешено управление вычислительным устройством, аутентифицирует человека на основе прикладываемого усилия. Например, диспетчер 206 считывания усилия может инструктировать системе 102 радиолокационного считывания усилия предоставлять радиолокационное поле, обнаруживать деформацию на отражающей поверхности, измерять характеристику прикладываемого усилия и подтверждать, что характеристика совпадает с ранее записанной характеристикой для человека, которому разрешено управление вычислительным устройством. Прикладываемое усилие может быть единственным усилием, которое перемещается, например, когда пользователь рисует символ, или последовательность следующих одно за другим усилий, например, когда пользователь постукивает по различным местам на отражающей поверхности. Кроме того, множество характеристик прикладываемого усилия может быть подтверждено, чтобы совпадать с записанными характеристиками, такими как местоположение, также как глубина, скорость и направление.
[0050] В необязательном порядке, на этапе 704 базовые данные об усилии могут быть сформированы, когда дополнительное усилие не прикладывается к отражающей поверхности 112, чтобы дополнительно увеличивать точность, аналогично этапу 604 на фиг. 6.
[0051] На этапе 706 данные об усилии, ассоциированные с прилагаемым усилием, принимаются. В некоторых случаях данные об усилиях принимаются в ответ на побуждение аутентифицированного человека для прикладываемого усилия. Диспетчер 206 считывания усилия может представлять усилие и его соответствующее управляющее воздействие, такое как текст: "нажмите и отыщите круг", или показывать анимацию или видеоизображение усилия и затем принимать усилие, прикладываемое аутентифицированным человеком. Эти данные об усилии могут затем быть записаны в качестве помощи в улучшении распознавания, так как способ, которым усилие выполняется, может варьироваться от человека к человеку. Для этого, диспетчер 206 считывания усилия может инструктировать системе 102 радиолокационного считывания усилия предоставлять радиолокационное поле, обнаруживать деформацию, формировать данные об усилии на основе обнаруженной деформации и сообщать данные об усилии диспетчеру 206 считывания усилия. Диспетчер 206 считывания усилия может записывать данные об усилии для последующей ссылки в компьютерно-читаемых носителях 204.
[0052] Данные об усилии могут также быть приняты в ответ на представление одного или более управляющих воздействий и затем измерено усилие, которое желательно для использования в качестве этого управления. Это предоставляет возможность пользователям принимать решение об усилии, которое они хотят использовать для этого управления. Например, пользователь может пожелать использовать усилие, ассоциированное со смахиванием двумя пальцами по отражающей поверхности 112, чтобы продвигать вперед мультимедийные данные или страницы документа. В этом случае, данные об усилии могут включать в себя размер области, относительно которой усилие прикладывается, чтобы характеризовать использование двух пальцев, и перемещение усилия, чтобы характеризовать смахивание. В качестве другого примера, пользователь может пожелать использовать единственное твердое нажатие пальцем по отражающей поверхности 112, чтобы выбирать контент. Ассоциированные данные об усилии, в этом случае, могут включать в себя размер области, относительно которой усилие прикладывается, чтобы характеризовать использование единственного пальца, величину усилия, чтобы характеризовать то, как твердо палец был прижат, и продолжительность времени, в течение которого усилие прикладывалось, чтобы характеризовать то, как долго палец был прижат. Другие измерения, такие как местоположение усилия по отражающей поверхности 112, могут также быть использованы, чтобы соотносить усилие с управляющим воздействием.
[0053] На этапе 708 принятые данные об усилии соотносятся с управляющим воздействием. Это может быть управляющим воздействием, уже ассоциированным с представленным усилием, или новым усилием, выбранным для соотнесения с управляющим воздействием, и т.д. Это соответствие может быть таким же простым как таблица поиска, например, персонализированная и индивидуальная или иная. Таблица поиска может ассоциировать принятые данные об усилии с управляющим воздействием. В некоторых аспектах таблица поиска может включать в себя измеренные данные об усилии, такие как измеренные характеристики приложенного усилия 110. В других аспектах таблица поиска может включать в себя ссылку на местоположение в компьютерно-читаемых носителях 204, которое хранит данные об усилии для управляющего воздействия, такие как синфазные и сдвинутые по фазе на 90 градусов данные, карты доплеровского диапазона и/или карты отражающей поверхности 112.
[0054] На этапе 710 соответствие прикладываемого усилия и управляющего воздействия записывается. Соответствие может быть ассоциировано с аутентифицированным человеком или пользователем вычислительного устройства, действующего, чтобы предоставлять возможность соотнесения позже принимаемого усилия с управляющим воздействием, ассоциированным с человеком, которому разрешено управлять вычислительным устройством.
[0055] Способ 800 предоставляет возможность радиолокационного считывания усилия. На этапе 802 радиолокационные сигналы передаются отражающей поверхности, которая сконфигурирована деформироваться на основе прикладываемого усилия. В некоторых аспектах диспетчер 220 системы может инструктировать приемопередатчику 214 предоставлять (например, проецировать, излучать, передавать) одно из описанных радиолокационных полей, отмеченных выше.
[0056] На этапе 804 радиолокационные сигналы, отраженные от отражающей поверхности, принимаются. Радиолокационные сигналы могут быть приняты приемопередатчиком 214. В качестве части принятия отраженных радиолокационных сигналов радиолокационные сигналы обрабатываются диспетчером 220 системы. Диспетчер 220 системы может создавать карту отражающей поверхности, изображающую размеры и перемещение отражающей поверхности 112.
[0057] На этапе 806 деформация отражающей поверхности обнаруживается. Деформация может быть обнаружена диспетчером 220 системы на основе порогового значения, такого как пороговое значение диапазона (например, диапазона от системы 102 радиолокационного считывания усилия до деформации), минимального изменения в глубине отражающей поверхности 112 и/или минимального порогового значения доплеровской частоты. В некоторых случаях пороговое значение может быть ассоциировано с местоположением или областью на отражающей поверхности 112, эффективной, чтобы предоставлять возможность обнаружения деформаций только в идентифицированном местоположении. Деформация может также быть обнаружена посредством сравнения текущей карты отражающей поверхности 112 с базовой картой, в которой дополнительное усилие не было приложено.
[0058] На этапе 808 характеристика прикладываемого усилия измеряется на основе обнаруженной деформации. Как описано выше, характеристика может включать в себя местоположение, величину, направление, перемещение, размер области относительно которой усилие прикладывается, и/или частоту возникновения прикладываемого усилия. Характеристика может также быть измерена посредством синфазных и сдвинутых по фазе на 90 градусов данных, карт доплеровского диапазона и/или карт отражающей поверхности. Дополнительно, характеристика может быть дополнительно связана с калибровочной информацией для того, чтобы предоставлять традиционное измерение характеристики прикладываемого усилия.
[0059] На этапе 810 прикладываемое усилие распознается на основе измеренной характеристики. В некоторых аспектах прикладываемое усилие может быть распознано непосредственно. Например, диспетчер 206 считывания усилия может использовать измеренную продолжительность прикладываемого усилия, чтобы распознавать усилие постукивания или удерживающее усилие. В качестве другого примера, диспетчер 206 считывания усилия может использовать измеренную доплеровскую частоту или скорость, чтобы распознавать стационарное усилие или перемещающееся усилие.
[0060] В других аспектах диспетчер 206 считывания усилия может распознавать прикладываемое усилие посредством связывания измеренной характеристики с характеристикой от ранее записанного усилия. Диспетчер 206 считывания усилия может осуществлять доступ к базе данных записанных данных об усилии, которые хранятся в компьютерно-читаемых носителях 204, и определять записанные данные об усилии, которые лучше всего коррелируют с прикладываемым усилием. Измеренная характеристика записанных данных об усилии и прикладываемое усилие могут быть непосредственно коррелированы для того, чтобы распознавать прикладываемое усилие. Измеренная характеристика записанных данных об усилии и прикладываемое усилие могут также быть опосредовано коррелированы посредством синфазных и сдвинутых по фазе на 90 градусов данных, карт диапазона доплеровских частот и/или карт отражающей поверхности 112. Кроме того, множество измеренных характеристик может быть использовано для распознавания прикладываемого усилия и улучшения корреляции.
[0061] На этапе 812 определяется управляющее воздействие, связанное с распознанным усилием. Определение управляющего воздействия, ассоциированное с распознанным жестом, может быть основано на соотнесении распознанного усилия с управляющим воздействием или множеством управляющих воздействий, ранее ассоциированных с измеренными усилиями. Например, таблица поиска может быть использована, чтобы определять управляющее воздействие, ассоциированное с распознанным усилием. Если может быть более чем одно управляющее воздействие, соотнесенное с распознанным усилием, диспетчер 206 считывания усилия может определять, какое управляющее воздействие ассоциировать с распознанным усилием, на основе других факторов. Эти другие факторы могут включать в себя управляющие воздействия, ассоциированные с выполняющейся в настоящий момент программой, устройство, недавно принявшее управляющее воздействие от человека, самое распространенное приложение или устройство для пользовательского управления, различные другие исторические данные и т.д.
[0062] На этапе 814 объекту передается определенное управляющее воздействие, приспособленное для управления объектом. Как отмечено, этот объект может быть операционной системой или приложением, ассоциированным с вычислительным устройством 104, хотя оно может также быть передано удаленному устройству непосредственно от системы 102 радиолокационного считывания усилия или через вычислительное устройство 104.
[0063] Предшествующее обсуждение описывает способы, относящиеся к радиолокационному считыванию усилия. Аспекты этих способов могут быть реализованы в аппаратных средствах (например, схеме с фиксированной логикой), программно-аппаратных средствах, программном обеспечении, ручной обработке или любом их сочетании. Эти способы могут быть осуществлены на одном или более объектах, показанных на фиг. 1, 2 и 9 (вычислительная система 900 описывается на фиг. 9 ниже), которые могут быть дополнительно разделены, объединены и т.д. Таким образом, эти чертежи иллюстрируют некоторые из множества возможных систем или оборудований, приспособленных для применения описанных способов. Объекты из этих чертежей, в целом, представляют программное обеспечение, программно-аппаратные средства, аппаратные средства, устройства или сети целиком, или их сочетание.
Примерная вычислительная система
[0064] Фиг. 9 иллюстрирует различные компоненты примерной вычислительной системы 900, которые могут быть реализованы как любой тип клиента, сервера и/или вычислительного устройства, которое описывается со ссылкой на предыдущие фиг. 1-8, чтобы реализовывать радиолокационное считывание усилия.
[0065] Вычислительная система 900 включает в себя устройства 902 связи, которые предоставляют возможность проводной и/или беспроводной передачи данных 904 устройства (например, принятых данных, данные, которые принимаются, данных, запланированных для рассылки, информационных пакетов данных и т.д.). Данные 904 об устройстве или другой контент устройства может включать в себя настройки конфигурации устройства, мультимедийный контент, сохраненный на устройстве, и/или информацию, ассоциированную с пользователем устройства (например, личность субъекта, прикладывающего усилие). Мультимедийный контент, сохраненный в вычислительной системе 900, может включать в себя любой тип аудио, видео и/или данные изображения. Вычислительная система 900 включает в себя один или более модулей 906 ввода данных, через которые любой тип данных, мультимедийного контента и/или входных данных может быть принят, например, выбираемые пользователем входные данные, сообщения, музыка, телевизионный мультимедийный контент, записанный видеоконтент и любой другой тип аудио, видео и/или данных изображений, принятых от любого источника контента и/или данных.
[0066] Вычислительная система 900 также включает в себя интерфейсы 908 связи, которые могут быть реализованы как любой один или более последовательных и/или параллельных интерфейсов, беспроводной интерфейс, любой тип сетевого интерфейса, модем и как любой другой тип интерфейса связи. Интерфейсы 908 связи обеспечивают соединение и/или линии связи между вычислительной системой 900 и сетью связи, по которой другие электронные, вычислительные и коммуникационные устройства обмениваются данными с вычислительной системой 900.
[0067] Вычислительная система 900 включает в себя один или более процессоров 910 (например, какой-либо из микропроцессоров, контроллеров и т.п.), которые обрабатывают различные компьютерно-исполняемые инструкции, чтобы управлять работой вычислительной системы 900 и предоставлять возможность способов, или в которых могут быть осуществлены, для радиолокационного считывания усилия. Альтернативно или в дополнение, вычислительная система 900 может быть реализована с любым одним или комбинацией аппаратных средств, программно-аппаратного обеспечения или неизменяемых логических схем, которые реализованы вместе со схемами обработки и управления, которые, в целом, идентифицированы по ссылке 912. Хотя не показано, вычислительная система 900 может включать в себя системную шину или систему передачи данных, которая связывает различные компоненты в устройстве. Системная шина может включать в себя любую одну или комбинацию различных шинных структур, таких как шина памяти или контроллер памяти, периферийная шина, универсальная последовательная шина и/или процессорная или локальная шина, которая использует любую из множества шинных архитектур.
[0068] Вычислительная система 900 также включает в себя компьютерно-читаемые носители 914, такие как одно или более запоминающих устройств, которые предоставляют возможность устойчивого и/или некратковременного хранилища данных (т.е. в противоположность простой передаче сигнала), примеры которого включают в себя оперативное запоминающее устройство (RAM), энергонезависимую память (например, любую одну или более из постоянного запоминающего устройства (ROM), флэш-памяти, EPROM, EEPROM и т.д.), и дисковое запоминающее устройство. Дисковое запоминающее устройство может быть реализовано как любой тип магнитного или оптического запоминающего устройства, такого как накопитель на жестком диске, записываемый и/или перезаписываемый компакт-диск (CD), любой тип цифрового универсального диска (DVD) и т.п. Вычислительная система 900 может также включать в себя устройство хранения на носителях большой емкости (носителях хранения) 916.
[0069] Компьютерно-читаемые носители 914 обеспечивает механизмы хранения данных, чтобы хранить данные 904 устройства, также как и различные приложения 918 устройства и любые другие типы информации и/или данных, относящихся к операционным аспектам вычислительной системы 900. Например, операционная система 920 может храниться как компьютерное приложение с помощью компьютерно-читаемых носителей 914 и исполняться на процессорах 910. Приложения 918 устройства могут включать в себя диспетчер устройств, такой как любая форма управляющего приложения, приложения системы программного обеспечения, модуль обработки сигналов и управления, код, который характерен для определенного устройства, уровень абстракции аппаратных средств для определенного устройства и т.д.
[0070] Приложения 918 устройства также включают в себя любые компоненты системы, механизмы или диспетчеры, чтобы реализовывать радиолокационное считывание усилия. В этом примере приложения 918 устройства включают в себя диспетчер 206 считывания усилия и диспетчер 220 системы.
Заключение
[0071] Хотя способы, использующие, и устройства, включающие в себя, радиолокационное считывание усилия, были описаны на языке, характерном для признаков и/или способов, должно быть понятно, что объем, определяемый прилагаемой формулой изобретения, необязательно ограничен конкретными описанными признаками или способами. Скорее, конкретные признаки и способы раскрываются как примерные реализации радиолокационного считывания усилия.
Реферат
Заявленная группа изобретений относится к способам и устройствам, осуществляющим радиолокационное считывание усилия. Эти способы и устройства могут предоставлять возможность измерения значительного охвата усилий. Кроме того, радиолокационное считывание усилия предоставляет возможность таких усилий для использования, управления и взаимодействия с устройствами. Аппаратура для радиолокационного считывания усилия содержит отражающую поверхность, приспособленную деформироваться на основе прикладываемого усилия и отражать радиолокационные сигналы, и систему радиолокационного считывания усилия, выполненную с возможностью передавать радиолокационные сигналы на отражающую поверхность, принимать радиолокационные сигналы, отраженные отражающей поверхностью, обнаруживать деформацию на отражающей поверхности на основе принятых радиолокационных сигналов и измерять характеристику прикладываемого усилия на основе обнаруженной деформации, при этом радиолокационные сигналы имеют частоты, находящиеся в диапазоне от 3 до 100 ГГц. Технический результат - обеспечение точного определения, характеризующего усилие, прикладываемое к отражающей поверхности. 4 н. и 17 з.п. ф-лы, 9 ил.
Комментарии