Способ измерения скорости полёта воздушного объекта и рлс для его осуществления - RU2608748C1
Код документа: RU2608748C1
Чертежи
Описание
Изобретение относится к способам и устройствам обработки радиолокационных (РЛ) сигналов в радиолокационных станциях (РЛС) и может быть использовано для измерения скорости полета воздушного объекта (ВО).
Известен способ измерения скорости воздушного объекта, заключающийся в формировании и излучении в пространство когерентного зондирующего импульсного РЛ сигнала, приеме отраженного от движущегося воздушного объекта РЛ сигнала, его последовательном преобразовании на промежуточные частоты, усилении, стробировании по дальности, преобразовании с выхода одного дальностного канала в цифровые квадратурные составляющие и вычислении по ним на основе процедуры быстрого преобразования Фурье (БПФ) спектра сигнала, а по нему - значения доплеровской частоты, обусловленной радиальной составляющей скорости полета воздушного объекта [1].
Известна РЛС, содержащая последовательно соединенные антенну, антенный переключатель, второй смеситель, предварительный усилитель промежуточной частоты, селектор дальности, усилитель промежуточной частоты и преобразователь частоты, а также усилитель мощности высокой частоты, модулятор, первый смеситель, гетеродин, кварцевый генератор, синхронизатор, фазовращатель, первый и второй фазовые детекторы (ФД), первый и второй аналого-цифровые преобразователи (АЦП), процессор БПФ и индикатор, причем первый выход синхронизатора соединен со вторым входом селектора дальности, второй выход через модулятор - с первым входом усилителя мощности высокой частоты, выход которого соединен со вторым входом антенного переключателя, выход гетеродина соединен со вторым входом усилителя мощности высокой частоты и первым входом первого смесителя, второй вход которого соединен с выходом кварцевого генератора, а выход - со вторым входом второго смесителя, второй и третий входы преобразователя частоты являются соответственно входами сигналов из канала углового сопровождения и его навигационного канала, первый выход соединен с первыми входами первого и второго ФД, второй выход - со вторым входом первого ФД и через фазовращатель - со вторым входом второго ФД, выходы первого и второго ФД соединены соответственно через первый и второй АЦП с первым и вторым входами процессора БПФ, выход которого соединен со входом индикатора [1].
Недостатком данных способа и РЛС является ограниченные их функциональные возможности, не позволяющие осуществить измерение совместно с радиальной скоростью полета ВО дополнительно и ее тангенциальной составляющей в горизонтальной или вертикальной плоскости.
Известен способ измерения скорости воздушного объекта, каковым может являться метеорологический объект, заключающийся в формировании суммарной диаграммы направленности (ДН) антенны на передачу и прием, формировании и излучении в пространство когерентного зондирующего импульсного РЛ сигнала, приеме отраженного от движущегося воздушного объекта РЛ сигнала и направлении его в суммарный приемный канал, в котором сигнал последовательно усиливают, когерентно детектируют в течение времени накопления Т, стробируют по дальности и выделяют один дальностный канал, с его выхода сигнал преобразуют в цифровой код, вычисляют спектр сигнала в виде M отсчетов значений спектра сигнала с выхода выделенного канала дальности, вычислении по спектру сигнала среднего значения доплеровской частоты, обусловленной движением воздушного объекта, и вычислении по значению средней доплеровской частоты радиальной составляющей скорости движения воздушного объекта [2].
Известна РЛС, содержащая передатчик, антенно-фидерную систему с диаграммо-образующей схемой формирования суммарной диаграммой направленности антенны на излучение когерентного зондирующего импульсного РЛ сигнала и прием отраженного от воздушного объекта РЛ сигнала, циркулятор, вычислитель и суммарный приемный канал, состоящий из усилителя, когерентного детектора, устройства стробирования по дальности, АЦП и вычислителя спектра сигнала, причем выход передатчика соединен с первым входом циркулятора, первый выход которого соединен со входом антенно-фидерной системы, выход которой соединен со вторым входом циркулятора, выход которого через последовательно соединенные усилитель и когерентный детектор соединен со входом устройства стробирования по дальности, выход которого соединен со входом аналого-цифрового преобразователя, группа выходов которого соединена с группой входов вычислителя спектра сигнала, группа выходов которого соединена с группой входов вычислителя, на выходе которого формируется значение радиальной составляющей скорости ВО [2].
Недостатком данных способа и РЛС является ограниченные их функциональные возможности, не позволяющие осуществить измерение не только радиальной скорости полета ВО, но и ее тангенциальной составляющей в горизонтальной или вертикальной плоскости. Это обусловлено тем, что измеряется только среднее значение доплеровской частоты, обусловленной полетом ВО, находящегося в пределах луча ДН антенны и разрешенного по дальности, т.е. за один интервал наблюдения в одной точке измерений, соответствующей разрешаемому объему, рассчитывается не полный вектор скорости полета ВО (его радиальная и одна из тангенциальных составляющих в вертикальной или горизонтальной плоскости), а только его радиальная составляющая.
Цель изобретения - расширение функциональных возможностей РЛС за счет реализации способа совместного измерения радиальной и тангенциальной составляющих скорости полета воздушного объекта.
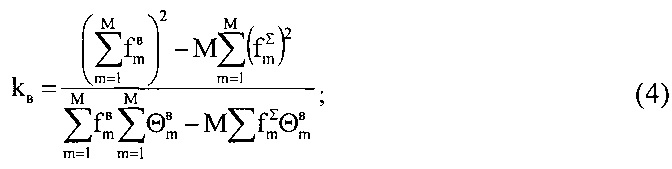
Для достижения цели в способе измерения скорости воздушного объекта, заключающемся в формировании суммарной ДН антенны на передачу и прием, формировании и излучении в пространство когерентного зондирующего импульсного РЛ сигнала, приеме отраженного от движущихся воздушного объекта РЛ сигнала и направлении его в суммарный приемный канал, в котором сигнал последовательно усиливают, когерентно детектируют в течение времени накопления Т, стробируют по дальности и выделяют один дальностный канал, с его выхода сигнал преобразуют в цифровой код, вычисляют спектр сигнала в виде М отсчетов значений спектра сигнала с выхода выделенного канала дальности, дополнительно на прием формируют разностные ДН антенны в вертикальной и горизонтальной плоскостях, направляют отраженный от воздушного объекта РЛ сигнал параллельно в вертикальный и горизонтальный разностные приемные каналы, в каждом из которых, аналогично, как и в суммарном приемном канале, сигнал последовательно усиливают, когерентно детектируют в течение времени накопления Т, стробируют по дальности и выделяют один дальностный канал, одинаковый по номеру выделенному дальностному каналу в суммарном приемном канале, с его выхода сигнал преобразуют в цифровой код и вычисляют спектр сигнала в виде М отсчетов значений спектра для выделенного канала дальности, а также измеряют средние значения амплитуд спектра сигнала на выходах соответственно вертикального и горизонтального разностных приемных каналов, вычисляют разность средних значений амплитуд спектров сигнала с выходов разностных приемных каналов, вращают антенну вокруг оси излучения с излучением когерентного зондирующего импульсного РЛ сигнала до тех пор, пока разность средних значений амплитуд спектров сигнала не достигнет максимального значения, осуществляют выбор разностного приемного канала, в котором средняя амплитуда спектра сигнала максимальна, для выделенного дальностного канала и каждого m-го отсчета из М спектральных отсчетов,




где
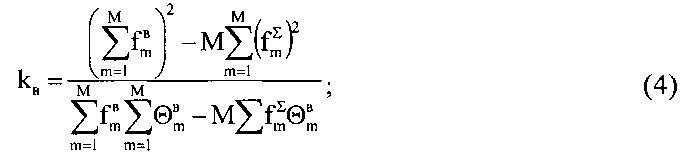
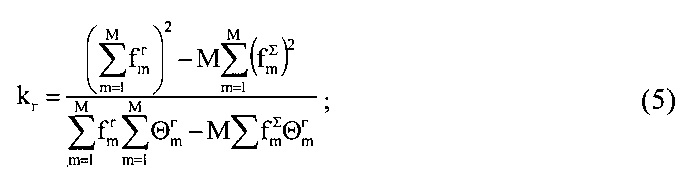


индексы «Σ», «в» и «г» соответствуют соответственно суммарному, разностному в вертикальной и горизонтальной плоскости приемным каналам;
λ - длина волны РЛС;








Для достижения цели в РЛС, содержащую передатчик и суммарный приемный канал, состоящий из первого усилителя, первого когерентного детектора, первого устройства стробирования по дальности, первого АЦП и первого вычислителя спектра сигнала, причем выход первого усилителя через когерентный детектор соединен со входом первого устройства стробирования, выход которого соединен со входом первого АЦП, группа выходов которого соединена с группой входов первого вычислителя спектра сигнала, группа выходов которого являются группой выходов суммарного приемного канала, дополнительно введены моноимпульсная антенно-фидерная система с диаграммо-образующей схемой формирования суммарной ДН антенны на излучение когерентного зондирующего импульсного РЛ сигнала и прием отраженного от воздушного объекта РЛ сигнала и на прием разностных ДН антенны в вертикальной и горизонтальной плоскостях, а также введены циркулятор, аналогичные суммарному приемному каналу, вертикальный и горизонтальный разностные приемные каналы, содержащие соответственно второй усилитель, второй когерентный детектор, второе устройство стробирования по дальности, второй АЦП, второй вычислитель спектра сигнала, группа выходов которого является группой выходов вертикального разностного приемного канала, и третий усилитель, третий когерентный детектор, третье устройство стробирования по дальности, третий АЦП, третий вычислитель спектра сигнала, группа выходов которого является группой выходов горизонтального разностного приемного канала, первый и второй измерители средних значений амплитуд спектра сигнала, блок вычитания, анализатор разности амплитуд, коммутатор, вычислитель и блок управления антенной, причем выход передатчика соединен с первым входом циркулятора, первый выход которого соединен с первым входом моноимпульсной антенно-фидерной системы, второй вход которой соединен с первым выходом блока управления антенной, второй, третий и четвертый выходы антенно-фидерной системы соединены соответственно со входами второго, первого и третьего усилителей, являющиеся соответственно входами вертикального разностного, суммарного и горизонтального разностного приемных каналов, группа выходов вертикального разностного приемного канала соединена с первой группой входов коммутатора и с группой входов первого измерителя среднего значения амплитуд спектра сигнала, группа выходов горизонтального разностного приемного канала соединена со второй группой входов коммутатора и с группой входов второго измерителя среднего значения амплитуд спектра сигнала, выходы первого и второго измерителей средних значений амплитуд спектра сигнала соединены соответственно с первым и вторым входами блока вычитания, выход которого соединен со входом анализатора разности амплитуд, первый и второй выходы которого соединены соответственно с объединенными первыми и вторыми входами коммутатора и вычислителя, третий выход анализатора разности амплитуд соединен со входом блока управления антенной, второй и третий выходы которого соединены соответственно с третьим и четвертым входами вычислителя, первая группа входов которого соединена с группой выходов коммутатора, вторая группа входов вычислителя соединена с группой выходов суммарного приемного канала, на первом и втором выходах вычислителя формируются значения радиальной и тангенциальной в горизонтальной или в вертикальной плоскости составляющих скорости полета воздушного объекта.
Новыми признаками, обладающими существенными отличиями, являются:
1. Параллельный прием и обработка отраженных от воздушного объекта РЛ сигнала в трех идентичных приемных каналах - суммарном, вертикальном разностном и горизонтальном разностном, в каждом из которых РЛ усиливают, когерентно детектируют в течение времени накопления Т, стробируют по дальности и выделяют один дальностный канал с одинаковым номером дальностного канала во всех трех приемных каналах, в каждом из приемных каналов сигнал преобразуется в цифровой код, по которому вычисляется спектр сигнала в виде М отсчетов значений спектра для выделенного канала дальности.
2. Выбор вертикального или горизонтального разностного канала приема РЛ сигнала в качестве измерительного на основе измерения средних значений амплитуд спектра сигнала на их выходах, вычисления разности этих амплитуд и вращения антенны вокруг оси излучения с излучением когерентного зондирующего импульсного РЛ сигнала до тех пор, пока разность средних значений амплитуд спектров сигнала не достигнет максимального значения.
2. Расчет моноимпульсным методом m -го значения угла прихода сигнала в плоскости, соответствующей выбранному разностному каналу, по каждому m-му отсчету из М спектральных отсчетов,
3. Расчет по формулам (1)-(7) методом линейного регрессионного анализа значения радиальной и тангенциальной составляющих скорости полета ВО в плоскости, соответствующей выбранному разностному каналу.
4. Замена в РЛС антенно-фидерной системы на моноимпульсную антенно-фидерную систему с диаграммо-образующей схемой формирования суммарной ДН антенны на излучение когерентного зондирующего импульсного РЛ сигнала и прием отраженного от воздушного объекта РЛ сигнала и на прием разностных ДН антенны в вертикальной и горизонтальной плоскостях, а также циркулятора с новыми функциональными возможностями и введение аналогичных суммарному приемному каналу разностных приемных каналов в вертикальной и горизонтальной плоскостях, а также двух измерителей средних значений амплитуд спектра сигнала, блока вычитания, анализатора разности амплитуд, коммутатора, вычислителя и блока управления антенной.
5. Новые связи между известными и введенными блоками в РЛС.
Данные признаки обладают существенными отличиями, так как в известных способах и РЛС не обнаружены.
Применение всех новых признаков позволит измерить радиальную и тангенциальную в горизонтальной или в вертикальной плоскости составляющие скорости полета воздушного объекта.
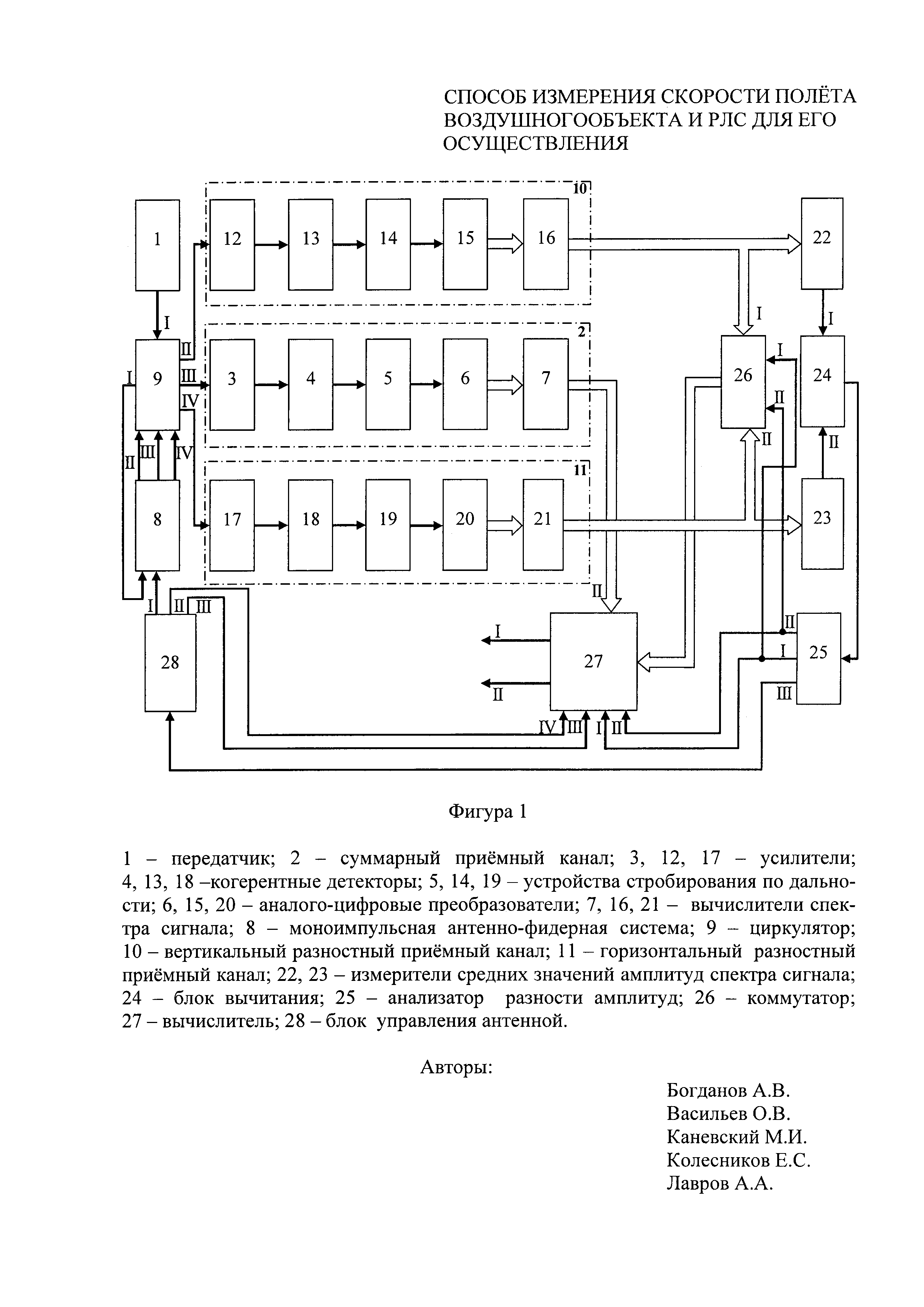
На фигуре 1 приведена блок-схема РЛС, реализующая предлагаемый способ измерения скорости полета воздушного объекта.
РЛС содержит передатчик 1 и суммарный приемный канал 2, состоящий из первого усилителя 3, первого когерентного детектора 4, первого устройства 5 стробирования по дальности, первого АЦП 6 и первого вычислителя 7 спектра сигнала, причем выход первого усилителя 3 через когерентный детектор 4 соединен со входом первого устройства 5 стробирования, выход которого соединен со входом первого АЦП 6, группа выходов которого соединена с группой входов первого вычислителя 7 спектра сигнала, группа выходов которого являются группой выходов суммарного приемного канала 2, а также содержит моноимпульсную антенно-фидерную систему 8 с диаграммо-образующей схемой формирования суммарной ДН антенны на излучение когерентного зондирующего импульсного РЛ сигнала и прием отраженного от воздушного объекта РЛ сигнала и на прием разностных ДН антенны в вертикальной и горизонтальной плоскостях, циркулятор 9, аналогичные суммарному приемному каналу 2, вертикальный 10 и горизонтальный 11 разностные приемные каналы, содержащие соответственно второй усилитель 12, второй когерентный детектор 13, второе устройство 14 стробирования по дальности, второй АЦП 15, второй вычислитель 16 спектра сигнала, группа выходов которого является группой выходов вертикального разностного приемного канала 10, и третий усилитель 17, третий когерентный детектор 18, третье устройство 19 стробирования по дальности, третий АЦП 20, третий вычислитель 21 спектра сигнала, группа выходов которого является группой выходов горизонтального разностного приемного канала 11, первый 22 и второй 23 измерители средних значений амплитуд спектра сигнала, блок 24 вычитания, анализатор 25 разности амплитуд, коммутатор 26, вычислитель 27 и блок 28 управления антенной, причем выход передатчика 1 соединен с первым входом циркулятора 9, первый выход которого соединен с первым входом моноимпульсной антенно-фидерной системы 8, второй вход которой соединен с первым выходом блока 28 управления антенной, а ее второй, третий и четвертый выходы соединены соответственно со входами второго 12, первого 3 и третьего 17 усилителей, являющиеся соответственно входами вертикального 10 разностного, суммарного 7 и горизонтального 11 разностного приемных каналов, группа выходов вертикального разностного приемного канала 10 соединена с первой группой входов коммутатора 26 и с группой входов первого измерителя 22 среднего значения амплитуд спектра сигнала, группа выходов горизонтального разностного приемного канала 11 соединена со второй группой входов коммутатора 26 и с группой входов второго измерителя 23 среднего значения амплитуд спектра сигнала, выходы первого 22 и второго 23 измерителей средних значений амплитуд спектра сигнала соединены соответственно с первым и вторым входами блока 24 вычитания, выход которого соединен со входом анализатора 25 разности амплитуд, первый и второй выходы которого соединены соответственно с объединенными первыми и вторыми входами коммутатора 26 и вычислителя 27, третий выход анализатора 25 разности амплитуд соединен со входом блока 28 управления антенной, второй и третий выходы которого соединены соответственно с третьим и четвертым входами вычислителя 27, первая группа входов которого соединена с группой выходов коммутатора 26, вторая группа входов вычислителя 27 соединена с группой выходов суммарного приемного канала 2, на первом и втором выходах вычислителя 27 формируются значения радиальной и тангенциальной в горизонтальной или в вертикальной плоскости составляющих скорости полета воздушного объекта.
Способ измерения скорости полета воздушного объекта осуществляется следующим образом (фигура 1).
С помощью моноимпульсной антенно-фидерной системы 8 формируются четыре ДН антенны:
суммарная ДН на передачу;
суммарная ДН на прием;
разностная ДН на прием в вертикальной плоскости;
разностная ДН на прием в горизонтальной плоскости.
В передатчике 1 формируется когерентный зондирующий импульсный РЛ сигнал, который поступает на первый вход циркулятора 9 и с его первого выхода - на первый вход моноимпульсной антенно-фидерной системы 8 и излучается в пространство.
Отраженный от воздушного объекта РЛ сигнал раздельно принимается суммарной и разностными ДН в вертикальной и горизонтальной плоскостях, формируемой диаграммо-образующей схемой моноимпульсной антенно-фидерной системы 8. По сигналу управления, поступающему на второй вход моноимпульсной антенно-фидерной системы 8 с первого выхода блока 28 управления антенной, осуществляется поворот всех ее диаграмм направленности вокруг оси излучения зондирующего РЛ сигнала. Со второго, третьего и четвертого выходов моноимпульсной антенно-фидерной системы 8 РЛ сигнал, принятый соответственно разностной ДН антенны в вертикальной плоскости, суммарной ДН антенны и разностной ДН антенны в горизонтальной плоскости, поступает соответственно на второй, третий и четвертый входы циркулятора 9. С его второго, третьего и четвертого выходов отраженный от воздушного объекта РЛ сигнал поступает на входы соответственно второго 12, первого 3 и третьего 17 усилителей, являющиеся соответственно входами разностного вертикального 10, суммарного 2 и разностного горизонтального 11 приемных каналов, в каждом из которых сигнал последовательно усиливается в усилителях 12, 3 и 17, когерентно детектируется в течение времени накопления Τ в когерентных детекторах 13, 4 и 18, стробируется в устройствах 14, 5 и 19 стробирования по дальности путем стробирования по времени задержки и выделяется один дальностный канал разрешения по дальности, одинаковый по номеру выделенному дальностному каналу в каждом приемном канале 10, 2 и 11. С помощью аналого-цифровых преобразователей 15, 6 и 20 сигналы с выходов выделенных дальностных каналов с одинаковыми номерами преобразуются в соответствующие массивы цифровых данных и поступают соответственно на вход второго 16, первого 7 и третьего 21 вычислители спектра сигнала, в которых для участка сигнала, длительностью Т, вычисляются соответствующие спектры сигнала в виде M отсчетов значений спектра для выделенного канала дальности.
С помощью первого 22 и второго 23 измерителей средних значений амплитуд спектра сигнала, блока 24 вычитания, анализатора 25 разности амплитуд, коммутатора 26 и блока 28 управления антенной осуществляется выбор вертикального или горизонтального разностного канала приема РЛ сигнала в качестве измерительного. С этой целью в измерителях 22 и 23 осуществляется измерение средних значений амплитуд спектра сигнала на выходах соответственно вертикального 10 и горизонтального 2 разностных приемных каналов и в блоке 24 вычисляется разность этих измеренных средних значений амплитуд спектров сигнала, которая анализируется в анализаторе 25. Одновременно с помощью блока 28 управления антенной осуществляется вращение антенны вокруг оси излучения с излучением когерентного зондирующего импульсного РЛ сигнала до тех пор, пока разность средних значений амплитуд спектров сигнала, проанализированная в анализаторе 25 разности амплитуд, не достигнет максимального значения.
На первом, втором и третьем выходах анализатора 25 разности амплитуд в зависимости от конкретной ситуации формируется один из трех следующих цифровых кодов:
код «10 0» (соответственно на первом, втором и третьем выходах) соответствует ситуации, когда в качестве измерительного канала выбран вертикальный разностный канал 10 (логические единица и ноль соответственно на первом и втором выходах) и с помощью блока 28 управления антенной не осуществляется вращение антенны вокруг оси излучения (логический ноль на третьем выходе);
код «0 1 0» соответствует ситуации, когда в качестве измерительного канала выбран горизонтальный разностный канал 11 (логические ноль и единица соответственно на первом и втором выходах) и с помощью блока 28 управления антенной не осуществляется вращение антенны вокруг оси излучения (логический ноль на третьем выходе);
код «0 0 1» соответствует ситуации, когда в качестве измерительного канала еще не выбран ни один из разностных каналов 10 или 11 (логические нули соответственно на первом и втором выходах) и с помощью блока 28 управления антенной осуществляется вращение антенны вокруг оси излучения (логическая единица на третьем выходе).
При достижении разности средних значений амплитуд спектров сигнала максимального значения, во-первых, на третьем выходе анализатора 25 разности амплитуд формируется сигнал логического нуля, который является запрещающим сигналом для блока 28 управления антенной и вращение антенны вокруг оси излучения прекращается, и, во-вторых, на первом и втором выходах анализатора 25 разности амплитуд либо формируются соответственно сигналы логической единицы и логического нуля, которые являются соответственно разрешающим и запрещающим сигналами, поступающими соответственно на первые и вторые входы коммутатора 26 и вычислителя 27, либо формируются соответственно сигналы логического нуля и логической единицы, которые являются соответственно запрещающим и разрешающим сигналами, также поступающими соответственно на первые и вторые входы коммутатора 26 и вычислителя 27. С помощью коммутатора 26 осуществляется подача на первую группу входов вычислителя 27 отсчетов значений спектра для выделенного канала дальности с выхода только того одного вертикального 10 или горизонтального 11 разностного канала приема, в котором среднее значение амплитуды спектра сигнала наибольшая.
В случае недостижения максимального значения разности средних значений амплитуд спектров сигнала, во-первых, на третьем выходе анализатора 25 разности амплитуд формируется сигнал логической единицы, который является разрешающим сигналом для блока 28 управления антенной и осуществляется ее вращение вокруг оси излучения, и, во-вторых, на первом и втором выходах анализатора 25 разности амплитуд одновременно формируются сигналы логического нуля, которые являются запрещающими для коммутатора 26 и вычислителя 27. В результате поступление отсчетов значений спектра сигнала с выхода либо вертикального 10, либо горизонтального 11 разностного канала на первую группу входов вычислителя 27 не осуществляется.
На вторую группу входов вычислителя 27 угла поступают значения отсчетов спектра сигнала, соответствующего выделенному каналу дальности с выхода суммарного приемного канала 2.
В вычислителе 27, во-первых, для выделенного дальностного канала и каждого m-го отсчета из М спектральных отсчетов,


При формировании на первом, втором и третьем выходах анализатора 25 разности амплитуд цифрового кода «0 0 1» сигналы, соответствующие радиальной и одной из тангенциальной составляющим скорости полета ВО, на первом и втором выходах вычислителя 27 не формируются.
Таким образом, применение предлагаемых способа измерения скорости полета ВО и РЛС для его осуществления позволят расширить функциональные возможности за счет совместного измерения радиальной и тангенциальной составляющих в горизонтальной или в вертикальной плоскости скорости полета воздушного объекта.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Дудник П.И., Чересов Ю.И. Авиационные радиолокационные устройства. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 1986, с. 247, рисунок 8.15 (аналог).
2. Патент на изобретение US, 2011/0304501, А (прототип).
Реферат
Изобретение относится к способам и устройствам обработки радиолокационных (РЛ) сигналов в радиолокационных станциях (РЛС) и может быть использовано для измерения скорости полета воздушного объекта (ВО). Достигаемый технический результат – расширение функциональных возможностей. Способ заключается в параллельном приеме и обработке отраженных от ВО сигналов в трех приемных каналах - суммарном, вертикальном разностном и горизонтальном разностном, в каждом из которых РЛ сигнал усиливают, когерентно детектируют, стробируют по дальности и выделяют один дальностный канал с одинаковым номером дальностного канала во всех трех приемных каналах, в каждом из приемных каналов вычисляется спектр сигнала для выделенного канала дальности, осуществляется выбор вертикального или горизонтального разностного канала приема РЛ сигнала в качестве измерительного на основе измерения средних значений амплитуд спектра сигнала на их выходах, вычисление разности этих амплитуд и вращения антенны вокруг оси излучения с излучением зондирующего РЛ сигнала до тех пор, пока разность средних значений амплитуд спектров сигнала не достигнет максимального значения, моноимпульсным методом рассчитывают значение угла прихода сигнала в плоскости, соответствующей выбранному разностному каналу, по каждому спектральному отсчету с выхода выбранного разностного канала и суммарного канала методом линейного регрессионного анализа рассчитывают значения радиальной и тангенциальной составляющих скорости полета ВО в плоскости, соответствующей выбранному разностному каналу. РЛС для реализации способа содержит передатчик, три приемных канала -
Формула















Документы, цитированные в отчёте о поиске
Способ и система для радиолокационного измерения скоростей и координат объектов (варианты)
Комментарии