Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны - RU2707556C1
Код документа: RU2707556C1
Чертежи



Описание
Изобретение относится к области радиолокации и может быть использовано в радиолокаторе с синтезируемой апертурой антенны (РСА), установленном на борту летательного аппарата, для оперативного определения высоты рельефа местности.
Известен интерферометрический режим РСА предназначенный для получения трехмерного РЛИ местности в координатах «дальность-азимут-высота» каждого разрешаемого элемента [«Радиовидение. Радиолокационные системы дистанционного зондирования Земли», Учебное пособие для ВУЗов под ред. Г.С. Кондратенкова, М.: Радиотехника, 2005 г. стр. 349-354]. Способ заключается в формировании элементов разрешения по дальности и азимуту обычным РСА способом. А для получения информации о высоте рельефа местности и объектов используется дополнительный канал измерения угла места каждого элемента разрешения по дальности и азимуту. Для измерения угла места используется антенная система РСА, при этом, чем больше размер антенны в угломестной плоскости, тем выше точность измерения высоты. Для упрощения конструкции и уменьшения массы используют антенную систему, состоящую из двух разнесенных по углу места антенн - интерферометр. Фаза сигнала интерферометра несет информацию о высоте рельефа. В простейшем интерферометрическом режиме РСА на РЛИ наносят линии равных углов места, расстояние между которыми пропорционально изменению высоты рельефа.
Недостатком указанного способа является то, что для достижения приемлемой точности измерения высоты рельефа местности требуется размещение двух антенн с большой базой интерферометра (расстояние между антеннами), что зачастую невозможно на носителях РСА (самолетах, беспилотных летательных аппаратах, космических аппаратах).
Известен способ формирования изображений РСА для интерферометрической обработки, описанный в публикации к патенту «Acquisition of SAR images for computing a height or a digital elevation model by interferometric processing» (Формирование РСА изображений для вычисления высоты или цифровых моделей высот путем интерферометрической обработки) [US 9019144, опубликовано 28.04.2015, МПК G01S 13/00, G01S 13/90]. Способ заключается в том, что формируют одним бортовым радиолокатором с синтезированной апертурой (РСА) антенны радиолокационное изображение одной и той же области с геометрией формирования, такой, чтобы обеспечить интерферометрическую обработку указанных РСА изображений. Указанный способ характеризуется геометрией формирования, в которой каждое РСА изображение области получается в соответствующем направлении формирования, которое определяет соответствующий угол отклонения максимума диаграммы направленности относительно направления полета, и в котором углы отклонения максимума диаграммы направленности таковы, что образуют средний угол отклонения максимума диаграммы направленности отличный от нуля; а РСА изображения получают только одним датчиком РСА, который находится на воздушной/спутниковой платформе, и использует только одну антенну и получает РСА изображения только за один проход воздушной/спутниковой платформы.
Наиболее близким по технической сущности является «Способ измерения рельефа поверхности Земли» [RU 2643790, опубликовано 06.02.2018, МПК G01C 11/00, G01S 13/89]. Способ заключается в том, что на борту одного носителя размещают один радиолокатор с синтезируемой апертурой антенны (РСА), с помощью которого искусственно формируют базу интерферометра во время последовательных наблюдений за поверхностью Земли, при этом осуществляя излучение зондирующих сигналов и прием отраженных от земной поверхности сигналов с синтезом пары радиолокационных изображений (РЛИ) и их интерферометрической обработкой. Базу интерферометра формируют вдоль трассы полета носителя РСА при его естественном перемещении в пространстве, осуществляют последовательные наблюдения за поверхностью Земли при постоянной высоте и скорости полета носителя РСА. Первый сеанс наблюдения осуществляют путем излучения зондирующих сигналов и приема сигналов, отраженных от поверхности Земли с синтезом РЛИ при азимутальном телескопическом обзоре на интервале синтезирования. После перемещения носителя РСА на расстояние базы интерферометра осуществляют второй сеанс наблюдения за той же областью поверхности Земли, также путем излучения зондирующих сигналов и приема сигналов, отраженных от поверхности Земли с синтезом РЛИ при азимутальном телескопическом обзоре на интервале синтезирования. После проведения пары сеансов наблюдения осуществляют интерферометрическую обработку пары РЛИ с извлечением информации о рельефе подстилающей поверхности, при этом наличие перпендикулярной проекции базы интерферометра, возникающей при использовании телескопического обзора с азимутальным углом α1, меньшим 90°, обеспечивает получение соотношения, отображающего однозначную связь между рельефом поверхности Земли и параметрами наблюдения с интерферометрической разностью фаз в виде -

где Н - постоянная высота полета носителя РСА; R1 - дальность до поверхности Земли; В - расстояние базы интерферометра; α1 - азимутальный угол; λ - рабочая длина волны передатчика РСА; ϕ - интерферометрическая разность фаз.
Недостатком указанных способов является недостаточная точность измерения высоты рельефа местности вызванная временной декорреляцией нескольких накапливаемых сигналов, по которым осуществляется определение высоты. Временная декорреляция сигналов, отраженных от одного и того же участка местности, возникает за счет пролета носителя РСА между интервалами накопления сигналов для формирования базы интерферометра.
Техническим результатом предлагаемого изобретения является повышение точности измерения высоты рельефа местности.
Технической проблемой решаемой предлагаемым изобретением является создание высокоточного способа измерения высоты рельефа местности для реализации в радиолокаторах с синтезированной апертурой.
Сущность изобретения заключается в том, что излучают радиолокационный сигнал в направлении участка местности и принимают отраженный сигнал, когерентно накапливают принятый сигнал s(t), синтезируют апертуру антенны.
Новым в заявляемом способе является то, что после накопления сигнала s(t) выделяют из него два сигнала s1(t) и s2(t) с перекрывающимися спектрами и центральными частотами ƒ1 и ƒ2, причем ƒ2>ƒ1, а синтез апертуры антенны осуществляют по сигналам s1(t) и s2(t) в виде совокупности комплексных амплитуд сигналов






Выделение сигналов s1(t) и s2(t) с перекрывающимися спектрами осуществляют преобразованием накопленного сигнала s(t) в частотную область s(ƒ), разделением преобразованного сигнала s(ƒ) в частотной области на два сигнала s1(ƒ) и s2(ƒ) с перекрывающимися спектрами и центральными частотами ƒ1 и ƒ2, преобразованием сигналов s1(ƒ) и s2(ƒ) во временную область s1(t) и s2(t). Накопленный сигнал s(t) преобразуют в частотную область быстрым преобразованием Фурье. Сигналы s1(ƒ) и s2(ƒ) преобразуют во временную область обратным быстрым преобразованием Фурье. Разность Δƒ центральных частот ƒ1 и ƒ2 сигналов s1(t) и s2(t) определяется соотношением

На Фиг. 1 представлена функциональная схема радиолокационной станции, осуществляющей заявляемый способ.
На Фиг. 2 изображена геометрическая схема определения высоты измерения рельефа местности.
На Фиг. 3 изображены спектры принятых и выделенных парных сигналов.
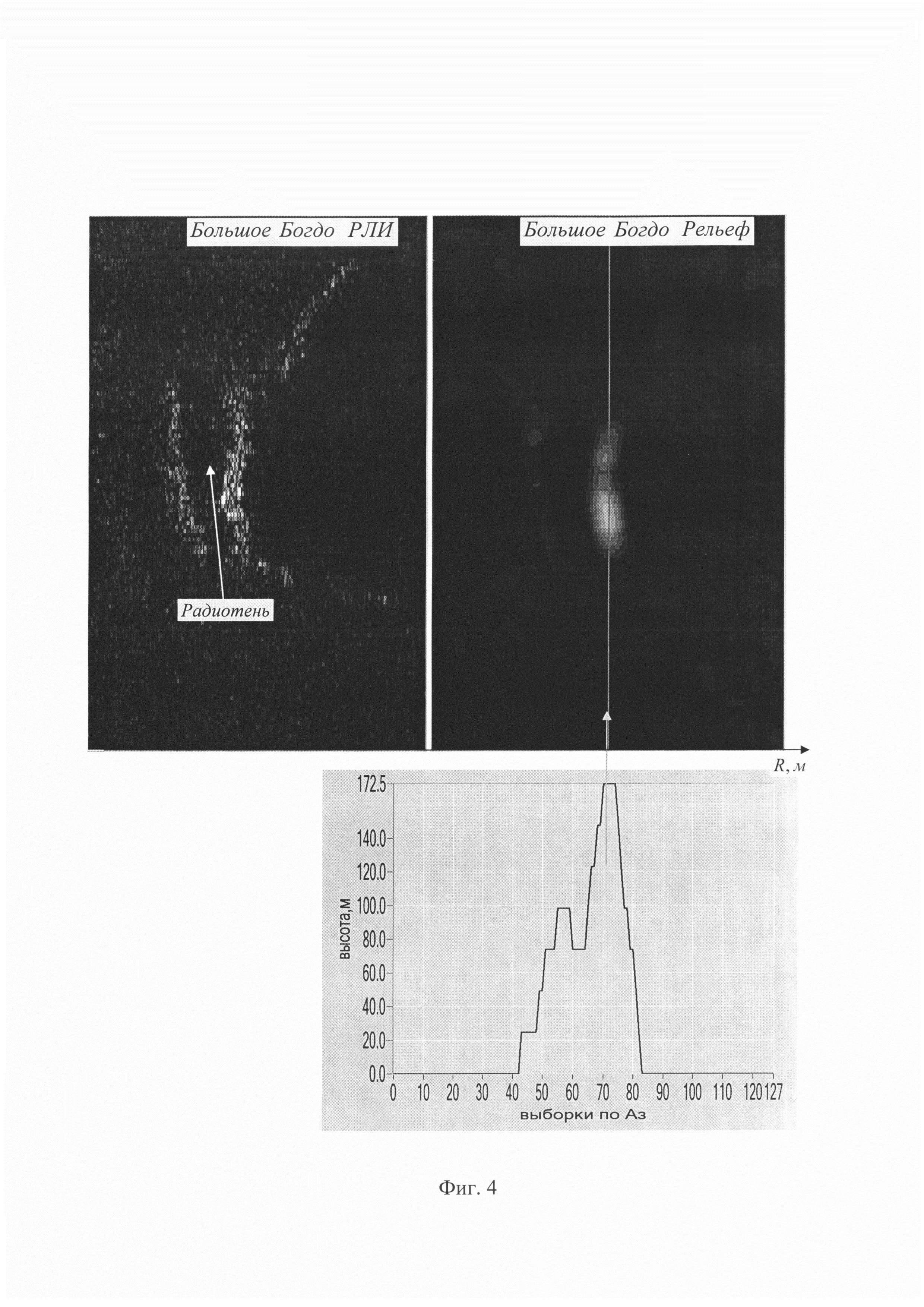
На Фиг. 4 представлены РЛИ, изображение рельефа местности и высотный профиль, полученные заявленным способом.
Способ определения высоты рельефа местности может быть реализован в радиолокаторе с синтезированной апертурой антенны, установленном на самолете и построенным, например, по следующей схеме. РСА состоит из антенны (1), передатчика (2), приемника (3), процессора управления (4), процессора сигналов (5), индикатора (6). Выход процессора управления (4) соединен с первым входом антенны (1), выход передатчика (2) соединен со вторым входом антенны (1). Выход антенны (1) соединен с входом приемника (3). Выход приемника (3) подключен к входу процессора сигналов (5). Выход процессора сигналов (5) подключен к входу индикатора (6).
Способ определения высоты рельефа местности радиолокатором с синтезированной апертурой антенны осуществляется следующим образом.
Режим определения высоты рельефа местности запускается летчиком соответствующей командой из процессора управления (4). Процессор управления (4) задает параметры управления антенне (1) для просмотра соответствующей зоны обзора. Луч диаграммы направленности антенны (ДНА) выставляется антенной (1) в требуемую позицию по азимуту α и углу места θ (Фиг. 2). При этом форма и ширина луча ДНА определяется из необходимого перекрытия зоны обзора - карандашный луч, cosec2 и т.д. Антенна (1) излучает сформированный передатчиком (2) когерентный импульсный радиолокационный сигнал (простые радиоимпульсы, фазокодоманипулированные (ФКМ) или линейно частотномодулированные (ЛЧМ) импульсы с периодом повторения, обеспечивающим перекрытие доплеровского диапазона частот, попадающих в зону обзора, и однозначное перекрытие зоны по дальности.
Отраженный от земной поверхности сигнал принимается антенной (1). С выхода антенны (1) сигнал поступает в приемник (3), где осуществляется аналоговая обработка сигнала, например усиление, фильтрация и т.д. После завершения аналоговой обработки осуществляют аналого-цифровое преобразование принятого сигнала. Затем принятый сигнал когерентно накапливается в процессоре сигналов (5). После завершения накопления принятого сигнала в процессоре сигналов (5) запускается его обработка.
Обработка накопленного сигнала s(t) начинается с выделения из накопленного сигнала s(t) парных сигналов s1(t) и s2(t) с перекрывающимися спектрами и центральными частотами ƒ1 и ƒ2. Для этого преобразуют накопленный сигнал s(t) в частотную область. Для этого сигнал s(t) в процессоре сигналов (5) подвергают быстрому преобразованию Фурье (БПФ).
smk(ƒ)=БПФ(snk(t))
где t - время, ƒ - частота, n - номер излученного импульса, k - номер элемента разрешения по дальности, m - номер частотного фильтра, smk(ƒ) - сигнал в частотной области.
Затем в процессоре сигналов (5) из сигнала smk(ƒ) выделяют два сигнала





Величина перекрытия спектров определяется исходя из требования корреляции парных сигналов


где


Так, например, при коэффициенте корреляции сигналов


Далее осуществляют преобразование сигналов





Затем осуществляют синтезирование апертуры антенны по сигналам




Далее осуществляют фазовую коррекцию сигналов по дальности


i - номер азимутальной позиции, k - номер текущего элемента разрешения по дальности, К - общее количество элементов разрешения по дальности.
В процессоре сигналов (5) осуществляют вычисление разности фаз Δϕ между скомпенсированными отсчетами комплексных сигналов



Далее определяют высоту объекта с координатами [i,k], которому соответствует отсчет разности фаз Δϕ[i,k]. Для этого умножают разность фаз Δϕ[i,k] на коэффициент

где Δƒ=ƒ2-ƒ1, с - величина скорости распространения электромагнитных волн, θ - угол места луча ДНА, α - азимут луча ДНА, R0 - дальность от антенны РСА до участка местности, ТН - время накопления сигнала s(t), V - скорость носителя РСА.

Таким образом, формируют массив высот рельефа участка местности, с высокой точностью за счет определения разности фаз по двум сигналам, выделенным из одного когерентно накопленного сигнала.
Далее по числовым значениям высот формируют либо изображение рельефа местности, либо высотный профиль и выводят на индикатор (6) для отображения летчику. На фигуре 4 приведены РЛИ участка местности с изображением горы Богдо (Астраханская область), рельеф этого участка местности (яркость пропорциональна высоте, чем ярче точка - тем больше высота) и высотный профиль участка местности по азимуту, полученные заявляемым способом.
Далее осуществляют обзор следующего участка местности, обусловленного пролетом носителя РСА, либо летчик вручную изменяет зону обзора переключением луча ДНА в другое положение по азимуту и углу места и осуществляется определение высоты рельефа нового заданного участка местности.
Таким образом, определяя высоту рельефа по разности фаз парных сигналов, сформированных с перекрытием по частоте из единого когерентно накопленного сигнала, повышается точность оценки рельефа местности.
Реферат
Изобретение относится к области радиолокации и может быть использовано в радиолокаторе с синтезируемой апертурой антенны, установленном на борту летательного аппарата, для оперативного определения высоты рельефа местности. Достигаемый технический результат – повышение точности измерения высоты рельефа местности по разности фаз парных сигналов, сформированных с перекрытием по частоте из единого когерентно накопленного сигнала, для реализации в радиолокаторах с синтезированной апертурой. Способ основан на том, что излучают радиолокационный сигнал в направлении участка местности и принимают отраженный сигнал, когерентно накапливают принятый сигнал s(t). После накопления сигнала s(t) выделяют из него два сигнала s(t) и s(t) с перекрывающимися спектрами и центральными частотами ƒи ƒ, причем ƒ>ƒ. Далее осуществляют синтез апертуры антенны по сигналам s(t) и s(t) в виде совокупности комплексных амплитуд сигналовв координатах i - азимут, k - дальность, далее осуществляют фазовую коррекцию комплексных амплитуд сигналов по дальности, затем определяют совокупность разностей фаз Δϕ[i,k] между скомпенсированными комплексными амплитудами сигналов и по соответствующей формуле определяют высоту рельефа участка местности. 4 з.п. ф-лы, 4 ил.
Формула







Документы, цитированные в отчёте о поиске
Способ измерения рельефа поверхности земли
Комментарии