Моноимпульсная радиолокационная система - RU2759511C1
Код документа: RU2759511C1
Чертежи
Описание
Изобретение относится к радиолокационным системам (РЛС), используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА), и предназначенным для обнаружения и пеленгования объектов с целью их сопровождения моноимпульсным способом.
Эффективность моноимпульсной пеленгации цели для ее углового сопровождения хорошо известна [1]. При этом классический способ определения углового отклонения UΨ принимаемого сигнала от оси радиолокатора определяется выражением:

где в числителе стоит произведение векторов сигналов UΣ и UΔ в суммарном и разностном каналах, а в знаменателе - квадрат модуля сигнала в суммарном канале.
В радиолокаторах с импульсным зондирующим сигналом на аналоговой элементной базе выходной сигнал пеленгатора (UΨ) в выражении (1) формировался путем фазового детектирования разностного сигнала с выхода усилителя промежуточной частоты (УПЧ) относительно опорного сигнала, в качестве которого использовался суммарный сигнал также с выхода УПЧ.
При этом деление на величину, стоящую в знаменателе выражения (1) выполнялось с помощью регулировки усиления в БАРУ.
Так, например, известно устройство [2], стр. 20, рис. 15, содержащее передатчик, антенну и приемник с суммарно-разностным преобразователем, гетеродином, смесителем, усилителями УПЧ и фазовыми детекторами сигнала разностного канала относительно сигнала суммарного канала, формирующими ошибку по углу.
Недостатками этого устройства являются невысокая помехоустойчивость, обусловленная использованием простого импульсного сигнала, невысокий потенциал (дальность действия) в режиме пеленгования и сопровождения объекта, и невысокая точность оценки угловой ошибки при воздействии помех.
Известно устройство [3], содержащее в приемном тракте для суммарного и разностного каналов усилители, фазовый детектор, определяющий знак пеленга, пороговые устройства в суммарном и разностном каналах и делитель сигналов, определяющий абсолютную величину пеленга.
В этом устройстве, благодаря введению пороговых устройств и делителя сигналов несколько повышена точность. Недостатками устройства являются низкая помехоустойчивость и снижение точности пеленгования при воздействии помех.
Известна РЛС [4], которая наиболее близка по технической сущности к предлагаемому устройству и принята в качестве прототипа предлагаемой системы.
РЛС по прототипу содержит:
- радиопередающее устройство (передатчик) фазоманипулированного (ФМ) зондирующего сигнала, включающий в том числе генератор кода ФМ, генератор сигнала гетеродина и генератор опорного сигнала промежуточной частоты, а также усилитель мощности зондирующего сигнала;
- антенное устройство с приводом антенны, включающее в том числе циркулятор, разделяющий связь антенного устройства с передатчиком от связи антенного устройства с приемником, и суммарно-разностный преобразователь, формирующий для приемника сигнал суммарного канала и сигнал разностного канала;
- радиоприемное устройство (приемник), получающее из передатчика сигнал гетеродина, опорный сигнал промежуточной частоты и включающий для каждого из двух каналов (суммарного и разностного) усилитель высокой частоты, усилитель промежуточной частоты и квадратурный фазовый детектор;
- цифровой согласованный фильтр суммарного канала, получающий код ФМ из передатчика;
- цифровой согласованный фильтр разностного канала, получающий код ФМ из передатчика;
- блок оценки угла между направлением принимаемого эхосигнала и осью антенны, выполненный известным способом, например, изложенным в [3];
- исполнительный блок обнаружения, включающий элементы обнаружения, выбора объекта назначения, захвата объекта на сопровождение, вычисления разности между заданным при захвате и измеренным в блоке оценки угла направлениями на объект и формирования управляющего сигнала на привод антенны;
- блок предварительной подготовки системы.
В этой системе, благодаря использованию фазоманипулированного зондирующего сигнала, существенно повышена помехоустойчивость ее работы.
В то же время, при воздействии шумовой заградительной помехи, когда полезный сигнал подавлен в шумах, точность пеленгования этой системы невысока, что снижает вероятность правильного сопровождения ею выбранного объекта назначения и приведения к выбранному объекту БПЛА. Кроме того, при работе по быстро маневрирующим объектам, когда спектральные характеристики эхосигналов быстро изменяются, используемые в системе интеграторы и фильтры на их основе, хорошо функционирующие по низкочастотным сигналам, дают сбои на широкополосных эхосигналах от быстро маневрирующих объектов, что снижает точность пеленгования.
Решаемой задачей является повышение точности пеленгования объекта при низком отношении сигнала к шуму и при работе по широкополосным эхосигналам от быстро маневрирующих объектов.
Для достижения заявленного технического результата предлагается перед запуском РЛС устанавливать в ней с помощью специального датчика априорно предпочтительный режим работы: с высокоскоростным реагированием или с высокоточным спектральным реагированием на изменения эхосигналов от объекта назначения.
Сущность изобретения заключается в том, что в моноимпульсную радиолокационную систему, содержащую передатчик, антенное устройство, приемник, цифровой согласованный фильтр суммарного канала с синусным и косинусным квадратурными выходами и модульным выходом, цифровой согласованный фильтр разностного канала с синусным и косинусным квадратурными выходами, а также исполнительный блок обнаружения и блок вентилей, выход которого подключен к вычитаемому угловому входу исполнительного блока обнаружения, при этом к кодовому входу передатчика и к доплеровскому входу приемника подключены соответственно кодовый выход и скоростной выход блока предварительной подготовки, выход сигнала включения мощности которого подключен к силовому входу передатчика, угловой выход антенного устройства подключен к угловому входу блока предварительной подготовки и к угловому входу исполнительного блока обнаружения, мощный выход передатчика подключен к мощному входу антенного устройства, гетеродинный выход и выход сигнала опорной частоты передатчика подключены к гетеродинному и опорному входам приемника, кодовый выход передатчика подключен к кодовым входам цифровых согласованных фильтров суммарного и разностного каналов и к кодовому входу блока предварительной подготовки, микромощный выход передатчика подключен к микромощному входу антенного устройства, суммарно-разностный выход которого подключен к высокочастотному входу приемника, а собственно антенна антенного устройства связана с электромагнитным полем окружающей среды, запускающий выход приемника, на котором формируется последовательность импульсов с частотой зондирования, подключен к запускающим входам передатчика и исполнительного блока обнаружения, синусный и косинусный выходы квадратурного сигнала суммарного канала приемника подключены к соответствующим входам цифрового согласованного фильтра суммарного канала, синусный и косинусный выходы квадратурного сигнала разностного канала приемника подключены к соответствующим входам цифрового согласованного фильтра разностного канала, выход приемника, на котором формируется последовательность импульсов с частотой дискретизации, подключен к синхровходам цифровых согласованных фильтров суммарного и разностного каналов и к входу синхронизации исполнительного блока обнаружения, выход сигнала управления приводом которого подключен к управляющему входу антенного устройства, а вход сигнала интенсивности подключен к модульному выходу цифрового согласованного фильтра суммарного канала, дополнительно введены измеритель фазы вектора квадратурного сигнала суммарного канала, измеритель фазы вектора квадратурного сигнала разностного канала, измеритель модуля вектора квадратурного сигнала разностного канала, датчик оптимальной фазы, формирователь оптимизирующего угла поворота векторов квадратурных сигналов суммарного и разностного каналов, формирователь оптимальной фазы вектора квадратурного сигнала разностного канала, формирователь оптимальных квадратур вектора квадратурного сигнала разностного канала, первый и второй блоки нормировки оценок углового отклонения, сумматор оценок углового отклонения, блок сравнения сигналов, датчик порогового сигнала, датчик полетного задания, мультиплексор управляющих сигналов, мультиплексор информационных сигналов и вентиль импульсов дискриминатора дальности, при этом модульный выход цифрового согласованного фильтра суммарного канала соединен также с первым сигнальным входом блока сравнения сигналов и с нормирующими входами блоков нормировки оценок углового отклонения, квадратурные выходы цифрового согласованного фильтра суммарного канала подключены к соответствующим входам исполнительного блока обнаружения и к входам измерителя фазы вектора квадратурного сигнала суммарного канала, выход которого подключен к сигнальному входу формирователя оптимизирующего угла поворота векторов квадратурных сигналов суммарного и разностного каналов, к параметрическому входу которого подключен датчик оптимальной фазы, а к выходу подключен первый вход формирователя оптимальной фазы вектора квадратурного сигнала разностного канала, квадратурные выходы цифрового согласованного фильтра разностного канала подключены к соответствующим входам исполнительного блока обнаружения, к входам измерителя модуля вектора квадратурного сигнала разностного канала и к входам измерителя фазы вектора квадратурного сигнала разностного канала, выход которого подключен ко второму входу формирователя оптимальной фазы квадратурного сигнала разностного канала, выход которого подключен к фазовому входу формирователя оптимальных квадратур вектора квадратурного сигнала разностного канала, к модульному входу которого подключен выход измерителя модуля вектора квадратурного сигнала разностного канала, а квадратурные выходы формирователя оптимальных квадратур вектора квадратурного сигнала разностного канала подключены к сигнальным входам первого и второго блоков нормировки оценок углового отклонения, выходы которых подключены к входам сумматора оценок углового отклонения, выход последнего подключен ко второму входу мультиплексора информационных сигналов, к первому входу которого подключен угловой выход исполнительного блока обнаружения, выход управляющего сигнала захвата исполнительного блока обнаружения подключен к первому входу мультиплексора управляющих сигналов, выход датчика порогового сигнала подключен к параметрическому входу блока сравнения, выход которого подключен ко второму входу вентиля импульсов дискриминатора дальности, первый вход которого подключен к выходу строба дальности исполнительного блока обнаружения, а выход подключен ко второму входу мультиплексора управляющих сигналов, выход которого подключен к управляющему входу блока вентилей, информационный вход блока вентилей подключен к выходу мультиплексора информационных сигналов, управляющий вход которого и управляющий вход мультиплексора управляющих сигналов соединены с датчиком полетного задания.
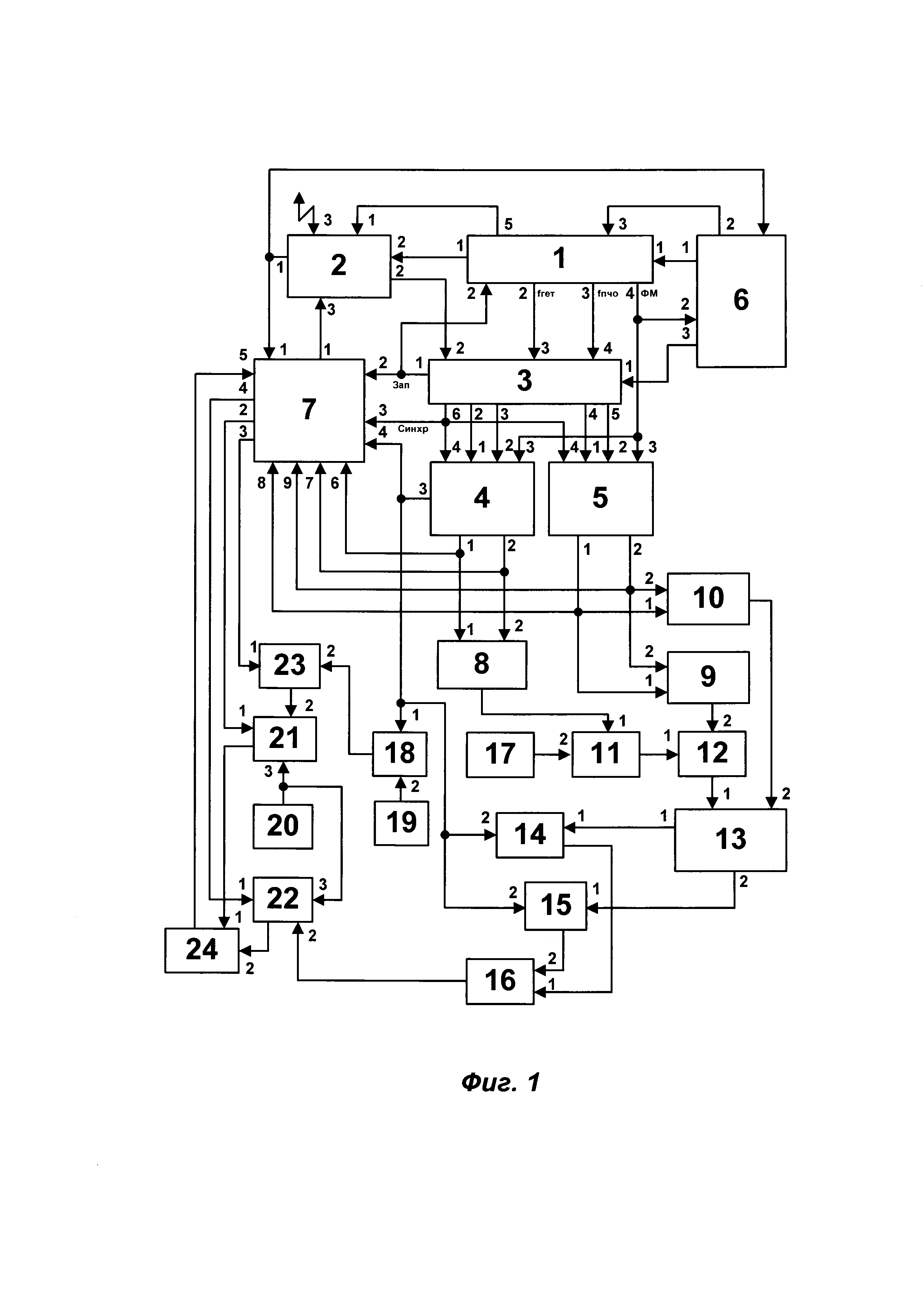
Сущность изобретения поясняется дальнейшим описанием и чертежами фиг. 1 структурной схемы предлагаемой моноимпульсной РЛС и фиг. 2 структурной схемы РЛС по прототипу.
На фиг. 1 приняты следующие обозначения:
1 - передатчик,
2 - антенное устройство,
3 - приемник,
4 - цифровой согласованный фильтр (ЦСФ) суммарного (Σ) канала,
5 - цифровой согласованный фильтр разностного (Δ) канала,
6 - блок предварительной подготовки,
7 - исполнительный блок обнаружения, выбора, захвата на сопровождение и сопровождения объекта назначения (далее по тексту - исполнительный блок обнаружения),
8 - измеритель фазы вектора квадратурного сигнала суммарного канала,
9 - измеритель фазы вектора квадратурного сигнала разностного канала,
10 - измеритель модуля вектора квадратурного сигнала разностного канала,
11 - формирователь оптимизирующего угла поворота векторов квадратурных сигналов суммарного и разностного каналов, выполненный в виде вычитателя,
12 - формирователь оптимальной фазы вектора квадратурного сигнала разностного канала, выполненный в виде сумматора,
13 - формирователь оптимальных квадратур вектора квадратурного сигнала разностного канала,
14 - первый блок нормировки оценок углового отклонения,
15 - второй блок нормировки оценок углового отклонения,
16 - сумматор оценок углового отклонения,
17 - датчик оптимальной фазы,
18 - блок сравнения сигналов,
19 - датчик порогового сигнала,
20 - датчик полетного задания,
21 - мультиплексор управляющих сигналов,
22 - мультиплексор информационных сигналов,
23 - вентиль импульсов дискриминатора дальности,
24 - блок вентилей.
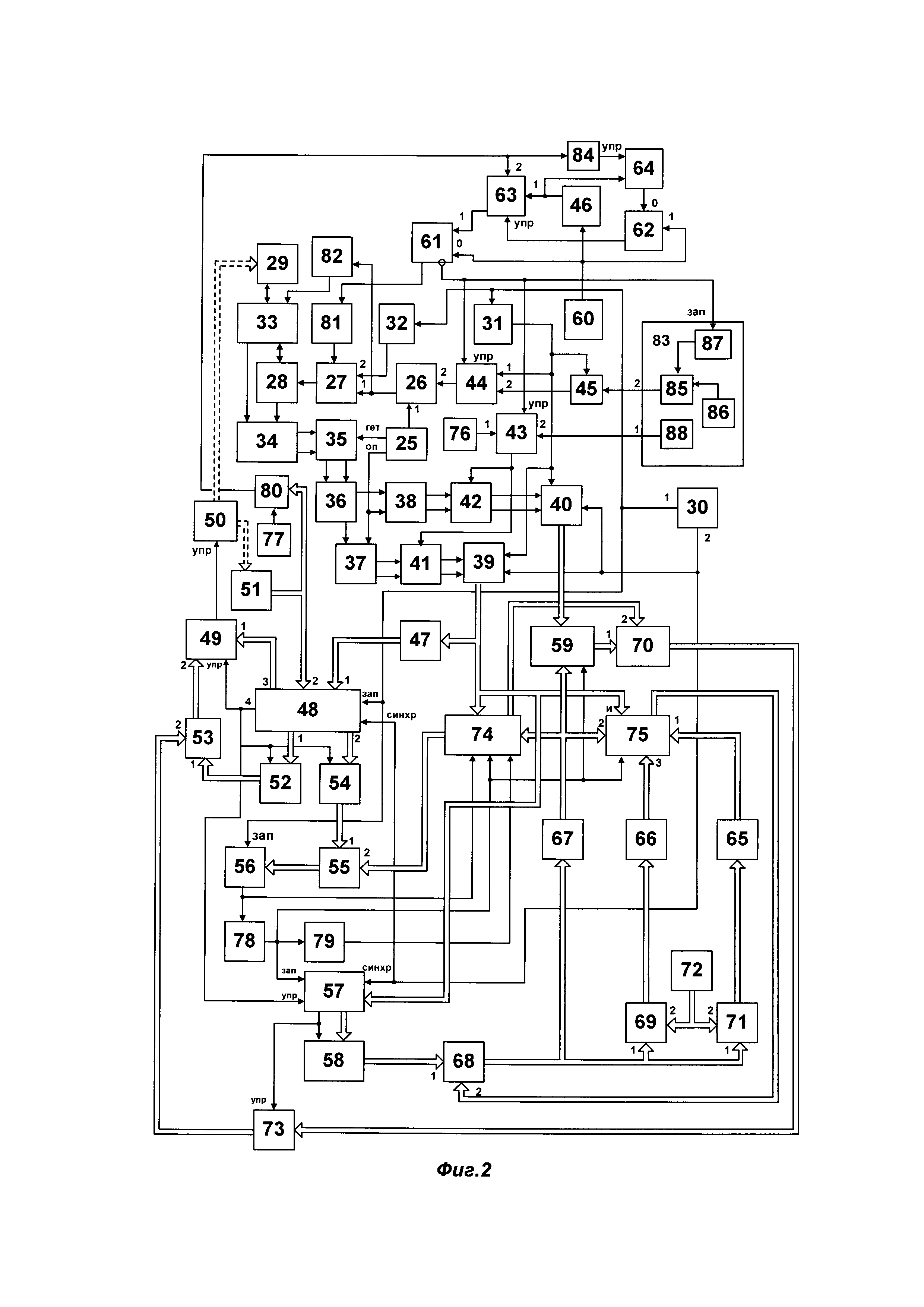
На фиг. 2 структурной схемы РЛС по прототипу приняты следующие обозначения:
25 - возбудитель,
26 - фазовый манипулятор,
27 - усилитель мощности,
28 - антенный переключатель,
29 - антенна,
30 - синхронизатор,
31 - генератор кода,
32 -импульсный модулятор,
33 - суммарно-разностный преобразователь,
34 - блок усилителей высокой частоты,
35 - блок смесителей,
36 - блок усилителей промежуточной частоты,
37, 38 - блоки квадратурных фазовых детекторов и амплитудно-временных квантователей сигналов суммарного и разностного каналов,
39, 40 - цифровые согласованные фильтры сигналов суммарного и разностного каналов,
41, 42 - доплеровские коммутаторы сигналов суммарного и разностного каналов,
43, 44 - первый и второй коммутаторы режима,
45, 46 - первый и второй контрольные элементы задержки,
47 - блок вычисления модуля сигнала объединения квадратур,
48 - блок обнаружения и выбора объекта сопровождения,
49 - коммутатор сигналов управления приводом,
50 - привод антенны,
51 - датчик углового положения антенны,
52 - регистр угла,
53 - первый вычитатель,
54 - регистр дальности,
55 - первый сумматор,
56 - преобразователь кода во временной интервал,
57 - блок захвата объекта на сопровождение,
58 - регистр частоты,
59 - фильтр доплеровской частоты
60 - датчик предстартовой подготовки,
61, 62 - триггеры пуска и отмены пуска,
63 - элемент И,
64 - вентиль отмены пуска,
65, 66, 67 - первый, второй, третий генераторы доплеровской частоты,
68, 69 - второй и третий сумматоры,
70 - угловой дискриминатор,
71 - второй вычитатель,
72 - кодовая шина,
73 - блок вентилей,
74 - дискриминатор дальности,
75 - частотный дискриминатор,
76 - датчик скорости,
77 - датчик контрольного угла,
78, 79 - первый и второй элементы задержки, соответственно,
80 - блок сравнения углов,
81 - коммутатор питания,
82 - направленный ответвитель,
83 - контрольный имитатор движения объекта,
84 - инвертор сигнала,
85 - счетчик обратного счета,
86 - задающий генератор,
87 - генератор одиночного импульса,
88 - кодовая шина имитатора.
Примером реализации передатчика 1 может служить схема выполнения передатчика РЛС по прототипу, в состав которого (см. фиг. 2) входят возбудитель 25, фазовый манипулятор 26, усилитель мощности 27, генератор кода 31, импульсный модулятор 32 и направленный ответвитель 82. При этом вход фазового манипулятора 26 является кодовым (первым) входом передатчика 1, объединенные входы импульсного модулятора 32 и генератора кодов 31 являются запускающим (вторым) входом передатчика 1, вход питания усилителя мощности 27 является силовым (третьим) входом передатчика 1, а его выход - мощным (первым) выходом передатчика 1. Первый выход возбудителя 25 является гетеродинным (вторым) выходом передатчика, второй выход возбудителя 25 является выходом опорного сигнала промежуточной частоты (третьим выходом передатчика 1), выход генератора кодов 31 является кодовым (четвертым) выходом передатчика 1, а выход направленного ответвителя 82 является микромощным (пятым) выходом передатчика 1.
Антенное устройство 2, может быть выполнено по известной схеме (см. фиг. 2), содержащей антенный переключатель 28, антенну 29, суммарно-разностный преобразователь (СРП) 33, привод антенны 50 и датчик 51 углового положения антенны, при этом дополнительный вход СРП 33 является микромощным (первым) входом антенного устройства 2, вход антенного переключателя 28 является мощным (вторым) входом антенного устройства 2, вход привода 50 антенны является управляющим (третьим) входом антенного устройства 2, выход датчика 51 углового положения антенны является угловым (первым) выходом антенного устройства 2, выходы антенного переключателя 28 и суммарно-разностного преобразователя 33 образуют суммарно-разностный (второй) выход антенного устройства 2, а антенна 29 связана третьим входом/выходом с электромагнитным полем окружающего пространства.
Приемник 3, может быть выполнен по известной схеме (см. фиг. 2), включающей синхронизатор 30, блок 34 усилителей высокой частоты, блок 35 смесителей, блок 36 усилителей промежуточной частоты, блоки 37, 38 квадратурных фазовых детекторов и амплитудно-временных квантователей суммарного и разностного каналов, доплеровские коммутаторы 41, 42 сигналов суммарного и разностного каналов. При этом вход сигнала скорости доплеровских коммутаторов 41 42 является доплеровским входом (первым) приемника 3, двухканальный вход УВЧ 34 (для суммарного и разностного каналов) является высокочастотным (вторым) входом приемника, вход смесителей 35 является гетеродинным (третьим) входом приемника 3, входы блоков 37 и 38 квадратурных фазовых детекторов 38 образуют опорный (четвертый) вход приемника 3, выход запускающих импульсов синхронизатора 30 является запускающим (первым) выходом приемника, выходы доплеровского коммутатора 41 образуют квадратурные выходы (второй и третий) суммарного канала приемника, выходы аналогичного коммутатора 42 образуют квадратурные выходы (четвертый и пятый) разностного канала приемника 3, второй выход синхронизатора 30 образует синхровыход (шестой выход) приемника 3.
Цифровой согласованный фильтр 4 (ЦСФ Σ) суммарного канала с вычислением модуля сигнала, выполнен по известной схеме (см. фиг. 2), включающей блок ЦСФ 39 и блок 47 объединения квадратур, и формирует как модуль квадратурного сигнала (на третьем выходе), так и сигналы каждой квадратуры (ΣSin и ΣCos) на своих первом и втором выходах.
Цифровой согласованный фильтр 5 (ЦСФ Δ) разностного канала, выполнен по известной схеме (ЦСФ 40 на фиг. 2) и формирует на своих первом и втором выходах квадратурный сигнал, включающий сигналы каждой квадратуры (ΔSin и ΔCos).
Блок 6 предварительной подготовки (БПП), выполнен по известной схеме, включающей на фиг. 2 первый и второй коммутаторы 43, 44 режима, первый и второй контрольные элементы 45, 46 задержки, датчик 60 предстартовой подготовки, триггеры 61, 62 пуска и отмены пуска, элемент И 63, вентиль 64 отмены пуска, датчик скорости 76, датчик 77 контрольного угла, блок 80 сравнения углов, коммутатор 81 питания, контрольный имитатор 83 движения и инвертор сигнала 84. При этом вход блока 80 сравнения углов является угловым (первым) входом блока 6 предварительной подготовки, вход управляемого элемента 45 задержки является кодовым (вторым) входом БПП 6, выход коммутатора 44 прямого и задержанного кодов фазовой манипуляции является кодовым (первым) выходом БПП 6, выход коммутатора 81 питания является выходом включения мощности (вторым выходом) БПП 6, выход коммутатора скорости 43 является скоростным (третьим) выходом БПП 6.
Исполнительный блок 7 обнаружения, выбора, захвата на сопровождение и сопровождения объекта назначения путем вычисления разности между заданным при захвате и измеренным при сопровождении углами объекта назначения, выполнен по известной схеме, включающей (на фиг. 2 РЛС по прототипу) блок 48 обнаружения и выбора объекта на сопровождение, коммутатор 49 сигналов управления приводом, регистр 52 угла, регистр 54 дальности, первый сумматор 55, преобразователь 56 кода во временной интервал, блок 57 захвата объекта на сопровождение, регистр 58 частоты, фильтр 59 доплеровской частоты, первый, второй и третий генераторы 65, 66, 67 доплеровской частоты, второй и третий сумматоры 68, 69, угловой дискриминатор 70, второй вычитатель 71, кодовую шину 72, дискриминатор 74 дальности, частотный дискриминатор 75, первый и второй элементы задержки 78, 79. При этом входы блока 48 обнаружения и выбора объекта сопровождения являются угловым (первым) входом, входом запуска (вторым), входом синхронизации (третьим) и входом интенсивности сигнала (четвертым) исполнительного блока 7 обнаружения, вход вычитателя 53 угла является вычитаемым угловым входом (пятым) исполнительного блока 7, квадратурные входы дискриминатора 74 дальности и частотного дискриминатора 75 образуют квадратурные входы (шестой и седьмой) сигналов суммарного канала исполнительного блока 7, квадратурные входы фильтра 59 доплеровской частоты являются квадратурными входами (восьмым и девятым) сигналов разностного канала исполнительного блока 7, выход коммутатора 49 сигналов управления приводом является выходом управления приводом (первым) исполнительного блока 7, выход управляющего сигнала блока 57 захвата объекта на сопровождение является выходом сигнала захвата (вторым) исполнительного блока 7, выход задержанного на элементе 78 задержки импульса преобразователя 56 кода во временной интервал является выходом (третьим) строба дальности исполнительного блока 7, выход углового дискриминатора 70 является угловым выходом (четвертым) исполнительного блока 7.
Первый и второй измерители 8, 9 фазы вектора квадратурных сигналов Σ и Δ каналов выполнены в виде постоянных запоминающих устройств (ПЗУ).
Измеритель 10 модуля вектора квадратурных сигналов Δ канала выполнен в виде ПЗУ.
Формирователь 11 оптимизирующего угла поворота векторов квадратурных сигналов Σ и Δ каналов, выполнен в виде вычитателя фаз.
Формирователь 12 оптимальной фазы квадратурного сигнала Δ канала, выполнен в виде сумматора фаз.
Формирователь 13 оптимальных квадратур вектора квадратурного сигнала Δ канала, выполнен в виде ПЗУ
Согласно структурной схеме фиг. 1 к первым входам передатчика 1 и приемника 3 подключены соответственно первый (кодовый) и третий (скоростной) выходы блока 6 предварительной подготовки, второй выход которого подключен к третьему (силовому) входу передатчика.
Первый (угловой) выход антенного устройства 2 подключен к первому входу блока 6 предварительной подготовки и к первому входу исполнительного блока 7 обнаружения.
Первый (мощный) выход передатчика 1 подключен ко второму входу антенного устройства 2, второй (суммарно-разностный) выход которого подключен к третьему (высокочастотному) входу приемника 3. Второй (гетеродинный) и третий (опорного сигнала промежуточной частоты) передатчика 1 подключены к третьему и четвертому входам приемника 3, четвертый (кода ФМ) выход передатчика 1 подключен к третьим входам ЦСФ 4 и ЦСФ 5 и ко второму входу блока 6 предварительной подготовки, а пятый выход подключен к первому (микромощному) входу антенного устройства 2.
Третий вход-выход антенного устройства 2 связан с электромагнитным полем окружающей среды.
Первый (запускающий) выход приемника 3 подключен ко вторым входам передатчика 1 и исполнительного блока 7 обнаружения, второй и третий (квадратурные) выходы суммарного канала приемника 3 подключены соответственно к первому и второму входам цифрового согласованного фильтра 4 суммарного канала. Четвертый и пятый квадратурные выходы разностного канала приемника 3 подключены соответственно к первым и вторым входам цифрового согласованного фильтра 5 разностного канала, а шестой выход (импульсной последовательности с частотой дискретизации) подключен к третьему входу (синхронизации) исполнительного блока 7 обнаружения и к входам синхронизации (четвертым) цифровых согласованных фильтров 4 и 5.
Первый выход исполнительного блока 7 обнаружения подключен к третьему (управляющему) входу антенного устройства 2, второй выход (сигнала захвата) подключен к первому входу мультиплексора 21 управляющих сигналов, третий выход (строба дальности) подключен к первому входу вентиля 23, а четвертый (угловой) выход подключен к первому входу мультиплексора 22 информационных сигналов.
Первый и второй выходы цифрового согласованного фильтра 4 суммарного канала подключены соответственно к первому и второму входам измерителя 8 фазы вектора квадратурного сигнала суммарного канала и к шестому и седьмому входам исполнительного блока 7 обнаружения, четвертый вход которого, а также первый (сигнальный) вход блока 18 сравнения и вторые (нормирующие) входы блоков 14, 15 нормировки оценок углового отклонения подключены к модульному (третьему) выходу ЦСФ 4 суммарного канала.
Выходы ЦСФ 5 разностного канала подключены соответственно к первым и вторым входам измерителя 9 фазы вектора квадратурного сигнала разностного канала и измерителя 19 модуля вектора квадратурного сигнала разностного канала, а также к восьмому и девятому входам 9 исполнительного блока 7 обнаружения.
Выход измерителя 8 фазы вектора квадратурного сигнала суммарного канала подключен к первому входу формирователя 11 оптимизирующего угла поворота векторов квадратурных сигналов суммарного и разностного каналов, ко второму входу которого подключен датчик 17 оптимальной фазы (π/4), а выход формирователя 11 подключен к первому входу формирователя 12 оптимального угла вектора квадратурного сигнала разностного канала, ко второму входу которого подключен выход измерителя 9 фазы вектора квадратурного сигнала разностного канала, а выход формирователя 12 подключен к первому входу формирователя 13 оптимальных квадратур вектора квадратурного сигнала разностного канала, ко второму входу которого подключен выход измерителя 10 модуля вектора квадратурного сигнала разностного канала.
Первый и второй выходы формирователя 13 оптимальных квадратур вектора квадратурного сигнала разностного канала подключены к первым входам блоков 14, 15 нормировки оценок угловых отклонений, выходы которых подключены соответственно к первому и второму входам сумматора 16 оценок углового отклонения, выход которого подключен ко второму входу мультиплексора 22.
Датчик 19 порогового сигнала подключен ко второму входу блока 18 сравнения, выход которого подключен ко второму входу вентиля 23, выход которого подключен ко второму входу мультиплексора 21.
Датчик 20 полетного задания подключен к управляющим (третьим) входам мультиплексоров 21 и 22, выходы которых подключены соответственно к управляющему (первому) и к информационному (второму) входам блока 24 вентилей, выход которого подключен к пятому (вычитаемому угловому) входу исполнительного блока 7 обнаружения.
РЛС действует следующим образом.
При подготовке к полету датчик 20 полетного задания, выполненный в виде тумблера - переключателя, устанавливается в одно из двух возможных состояний логического сигнала на своем выходе:
- логическая единица в случае, если РЛС предстоит во время полета БПЛА работать в условиях большого количества близко расположенных объектов в области их возможного положения (ОВПО);
- логический ноль в случае, если РЛС предстоит во время полета БПЛА работать по быстро маневрирующим объектам в ОВПО.
Указанный сигнал поступает на третьи (управляющие) входы мультиплексоров 21 и 22, обеспечивая прохождение на их выходы сигналов с их первых входов в случае логической единицы и со вторых входов в случае логического нуля.
Перед стартом БПЛА производится контроль исправности РЛС известным способом с помощью блока 6 предварительной подготовки (БПП), который формирует управляющие сигналы на своих выходах. При этом с первого выхода в передатчик 1 через его первый вход поступает задержанный на величину имитируемой дальности до объекта код фазовой манипуляции. Со второго выхода БПП 6 на третий вход передатчика 1 поступает управляющий сигнал, отключающий в нем усилитель мощности зондирующего сигнала и обеспечивающий поступление на первый вход антенного устройства 2 микромощного задержанного фазоманипулированного сигнала с пятого выхода передатчика 1. С третьего выхода БПП 6 на первый вход приемника 3 поступает сигнал, обеспечивающий в нем корректную работу компенсаторов доплеровского смещения. При этом в РЛС в микромощном режиме (при отключенном усилителе мощности в передатчике 1) имитируется приближающийся объект и выполняется его захват и сопровождение с контролем времени отклонения антенны на заданный угол. Контроль времени выполняется по моменту прихода сигнала с первого выхода антенного устройства 2 на первый вход блока 6 предварительной подготовки параллельно с поступлением его на первый вход исполнительного блока 7 обнаружения. Старт БПЛА разрешается при подтверждении исправности РЛС. При этом включается задержка на время подлета БПЛА к области возможного положения объекта назначения (ОВПО), по истечении которой РЛС включается в основной режим.
В основном режиме в приемнике 3, в состав которого входит синхронизатор, известным способом формируются на первом выходе сигналы запуска интервалов зондирования, поступающие на вторые входы передатчика 1 и исполнительного блока 7. При этом передатчик 1 формирует известным способом на первом выходе зондирующие ФМ импульсы, поступающие на второй вход антенного устройства 2 и излучаемые им через третий вход/выход в направлении ОВПО. В это время исполнительный блок 7 известным способом управляет приводом антенны с помощью сигналов, формируемых на его первом выходе и поступающих на третий вход антенного устройства 2.
Эхосигналы, приходящие из ОВПО через третий вход/выход, обрабатываются известным способом в антенном устройстве 2 и через выход его суммарно-разностного преобразователя поступают на высокочастотный вход приемника 3, на третий и четвертый входы которого поступают соответственно сигналы частоты гетеродина и опорной промежуточной частоты со второго и третьего выходов передатчика 1. В приемнике 3 сигналы обрабатываются известным способом для суммарного канала и для разностного канала. При этом сигналы двух квадратур суммарного канала со второго и третьего выходов приемника 3 поступают на входы ЦСФ 4 суммарного канала, а сигналы двух квадратур разностного канала с четвертого и пятого выходов приемника 3 поступают на входы ЦСФ 5 разностного канала. На третьи входы ЦСФ 4 и ЦСФ 5 поступает и запоминается на весь интервал зондирования сигнал кода ФМ с четвертого выхода передатчика 1 в начале каждого текущего интервала зондирования. Кроме того, на шестом выходе приемника 3 формируются импульсы синхронизации с частотой дискретизации принимаемых сигналов, которые поступают на четвертые входы ЦСФ 4 и ЦСФ 5 и на третий вход исполнительного блока 7 обнаружения, обеспечивая их работу в заданном ритме известным способом.
ЦСФ 4 и ЦСФ 5 известным способом формируют сжатые сигналы на своих первых и вторых квадратурных выходах, а ЦСФ 4 еще дополнительно формирует на своем третьем выходе сигнал модуля сжатого сигнала, поступающий на четвертый вход исполнительного блока 7 обнаружения, а также на первый вход блока сравнения 18 и на вторые входы блоков нормировки 14 и 15.
Исполнительный блок 7 известным способом, управляя сигналом со своего первого выхода приводом антенны в антенном устройстве 2, поступающим на его третий вход, выполняет обзор ОВПО, обнаружение объектов, выбор объекта назначения, захват выбранного объекта на сопровождение, сопровождение объекта по дальности, по доплеровской частоте, и переход к сопровождению выбранного объекта по углу.
В случае, если датчик 20 полетного задания установлен в состояние логической единицы, соответствующее работе в условиях близко расположенных объектов в ОВПО, сигнал захвата со второго выхода исполнительного блока 7 проходит через мультиплексор 21 на управляющий вход блока 24 вентилей, открывая его, а выходной сигнал углового дискриминатора, формируемый известным способом на четвертом выходе исполнительного блока 7, проходит через мультиплексор 22 и через открытый блок 24 вентилей на пятый вход исполнительного блока 7, замыкая в нем контур углового сопровождения выбранного объекта, в основе которого работает быстродействующий дискриминатор по дальности с частотой дискретизации, равной частоте зондирования РЛС, и дискриминатор по частоте доплеровского смещения, работающий с использованием фильтров нижних частот (интеграторов), задержка которых (инерционность) на 1-2 порядка больше интервала зондирования РЛС. Такой дискриминатор по частоте обеспечивает по углу высокую разрешающую способность, но пониженное быстродействие из-за инерционности.
В случае, если датчик 20 полетного задания установлен в состояние логического нуля, соответствующее работе по быстро маневрирующим объектам в ОВПО, с третьего выхода исполнительного блока 7 на первый вход вентиля 23 поступают импульсы преобразователя код-время задержки (стробы дальности), следующие с частотой зондирования РЛС и обеспечивающие соответствующую этой частоте высокую скорость реакции на изменения параметров движения сопровождаемого объекта.
При этом сопровождение выбранного объекта по углу осуществляется следующим образом. Сигналы с первого и второго квадратурных выходов ЦСФ 4 (ΣSin и ΣCos) поступают на входы измерителя 8 фазы ϕΣ вектора Σ квадратурного сигнала в суммарном канале. В измерителе 8, выполненном в виде постоянного запоминающего устройства (ПЗУ), определяется фаза вектора квадратурного сигнала суммарного канала соответствии с выражением

которое заранее просчитано для всех возможных значений входных сигналов, а результат расчетов установлен в ПЗУ.
Одновременно сигналы с квадратурных выходов ЦСФ 5 поступают на входы аналогичного измерителя 9 фазы ϕΔ вектора квадратурного сигнала в разностном канале

Кроме того, сигналы с первого и второго выходов ЦСФ 5 поступают на входы измерителя 10 модуля МΔ вектора Δ канала, выполненного в виде ПЗУ, реализующего выражение

по аналогии с измерителями 8 и 9, результат на выходе которых формируется с минимальной задержкой (наносекунды).
Сигнал с выхода измерителя 8 фазы вектора квадратурного сигнала Е канала поступает на первый вход блока 11 формирования оптимизирующего угла δϕ поворота векторов Σ и Δ каналов, выполненного в виде формирователя разности сигналов (вычитателя):

для чего к его второму входу подключен датчик 17 оптимальной фазы (константы равной π/4).
Сигнал с выхода блока 11 поступает на первый вход формирователя 12 оптимального угла поворота вектора (ϕΔОПТ) квадратурного сигнала Δ канала, на второй вход которого поступает сигнал с выхода измерителя 9 фазы вектора квадратурного сигнала Δ канала. Блок 12 выполнен в виде сумматора, вычисляющего оптимальный угол в соответствии с выражением:

Сигнал с выхода блока 12 поступает на первый вход формирователя 13 оптимальных квадратур вектора Δ канала. На второй вход формирователя 13 поступает сигнал с выхода измерителя 10 модуля МΔ вектора квадратурного сигнала Δ канала.
Формирователь 13 выполнен в виде двухканального умножителя, в первом канале которого, реализованном в виде ПЗУ, модуль МΔ умножается на функцию Sin (ϕΔОПТ) от сигнала ϕΔОПТ и сигнал произведения, представляющий собой первую оптимальную квадратуру ΔSinОПТ вектора Δ, поступает на первый выход формирователя 13:

Во втором аналогичном канале формирователя 13 модуль МΔ умножается на функцию Cos (ϕΔОПТ), а сигнал произведения, представляющий собой вторую оптимальную квадратуру ΔCosОПТ вектора Δ, поступает на второй выход формирователя 13:

Сигналы с выходов формирователя 13 поступают на первые входы соответственно блоков 14 и 15 нормировки угловых оценок, на вторые входы которых поступает сигнал модуля суммарного канала MΣ с третьего выхода ЦСФ 4. В блоках нормировки 14 и 15, выполненных в виде ПЗУ с установленным в нем результатом деления входных сигналов, формируются сигналы угловых оценок ΨSin и ΨCos соответственно в выражениях:


Сигналы с выходов блоков 14 и 15 поступают соответственно на первый и второй входы сумматора 16, в котором формируется оценка углового отклонения UΨ сопровождаемого сигнала от оси антенного устройства.

Сигнал с выхода сумматора 16 поступает на второй вход мультиплексора 22. Задержка поступления сигнала от сумматора 16 относительно срабатывания ЦСФ 4 и 5 определяется быстродействием элементов и не превышает несколько наносекунд.
Сигнал MΣ с третьего выхода ЦСФ 4 поступает также на первый вход блока 18 сравнения, на второй вход которого подается сигнал от датчика 19 порога обнаружения, выполненного в виде шины с установленным на ней двоичным кодом. В случае, если модуль сопровождаемого сигнала MΣ превышает порог обнаружения, на выходе блока 18 сравнения формируется единичный сигнал, который поступает на второй вход вентиля 23. Если этот сигнал совпадает по времени со стробом дальности - импульсом задержки сопровождаемого объекта на первом входе вентиля 23, то на выходе последнего формируется импульс, который проходит через мультиплексор 21 и поступает на управляющий вход блока 24 вентилей, открывая его для прохождения сигнала с выхода сумматора 16 через мультиплексор 22.
Сигнал с выхода блока 24 вентилей поступает на пятый вход исполнительного блока 7 обнаружения и замыкает таким образом контур сопровождения объекта по углу.
При этом в режиме работы по быстро маневрирующим объектам за счет одновременного поворота векторного сигнала в суммарном и разностном каналах на одинаковый оптимальный угол, достигается существенное повышение точности пеленгования объекта при низком отношении сигнала к шуму в отклике сопровождаемого объекта.
Как показали стендовые испытания РЛС, при отношении сигнала к шуму на входе около 0 дБ, (амплитуда сигнала равна среднеквадратическому значению шума) точность пеленгования эхосигнала повышается в части отношения истинного значения угла к среднеквадратическому отклонению, на 4÷9 дБ. При этом вероятность правильного определения знака угла увеличивается от 60% (с незначительным превышением числа правильных определений над числом неправильных) до убедительных 90%.
Таким образом, в предлагаемой моноимпульсной РЛС наряду с повышением точности пеленгования за счет спектральной обработки сигналов при низком отношении сигнала к шуму, реализуется повышение точности пеленгования при работе по широкополосным эхосигналам от быстро маневрирующих объектов за счет оптимизирующего одновременного поворота по фазе мгновенных векторных квадратурных сигналов в суммарном и разностном каналах.
На основании приведенного описания и чертежей предлагаемая радиолокационная система может быть изготовлена при использовании известных комплектующих изделий и известного в радиоэлектронной промышленности технологического оборудования и использована на подвижных носителях в качестве РЛС для обнаружения и сопровождения объектов.
Источники информации
1. Свиридов Э.Ф. Сравнительная эффективность моноимпульсных радиолокационных систем пеленгации. Л., Судостроение, 1964 г.
2. Сколник М. Справочник по радиолокации. М.: Сов. радио, 1978 г, т. 4 (стр. 20, рис. 15).
3. Зуфрин A.M. Методы построения судовых автоматических угломерных систем. Л. Судостроение, 1970 г, (стр. 114, рис. 2.10а).
4. Патент РФ № 2309430, МПК G01S 13/44, публикация 27.10.2007 г.
Реферат
Изобретение относится к радиолокационным системам (РЛС), используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА), и предназначенным для обнаружения и пеленгования объектов с целью их сопровождения моноимпульсным способом. Техническим результатом изобретения является повышение точности пеленгования объекта при низком отношении сигнала к шуму и при работе по широкополосным эхосигналам от быстро маневрирующих объектов. Заявленная моноимпульсная радиолокационная система содержит передатчик, антенное устройство, приемник, цифровой согласованный фильтр суммарного канала с синусным и косинусным квадратурными выходами и модульным выходом, цифровой согласованный фильтр разностного канала с синусным и косинусным квадратурными выходами, а также исполнительный блок обнаружения и блок вентилей. В систему дополнительно введены измеритель фазы вектора квадратурного сигнала суммарного канала, измеритель фазы вектора квадратурного сигнала разностного канала, измеритель модуля вектора квадратурного сигнала разностного канала, датчик оптимальной фазы, формирователь оптимизирующего угла поворота векторов квадратурных сигналов суммарного и разностного каналов, формирователь оптимальной фазы вектора квадратурного сигнала разностного канала, формирователь оптимальных квадратур вектора квадратурного сигнала разностного канала, первый и второй блоки нормировки оценок углового отклонения, сумматор оценок углового отклонения, блок сравнения сигналов, датчик порогового сигнала, датчик полетного задания, мультиплексор управляющих сигналов, мультиплексор информационных сигналов и вентиль импульсов дискриминатора дальности. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Моноимпульсная рлс миллиметрового диапазона
Комментарии