Способ обработки радиолокационных сигналов в моноимпульсной рлс - RU2659807C1
Код документа: RU2659807C1
Чертежи
Описание
Изобретение относится к радиолокационной технике и может быть использовано в моноимпульсных РЛС.
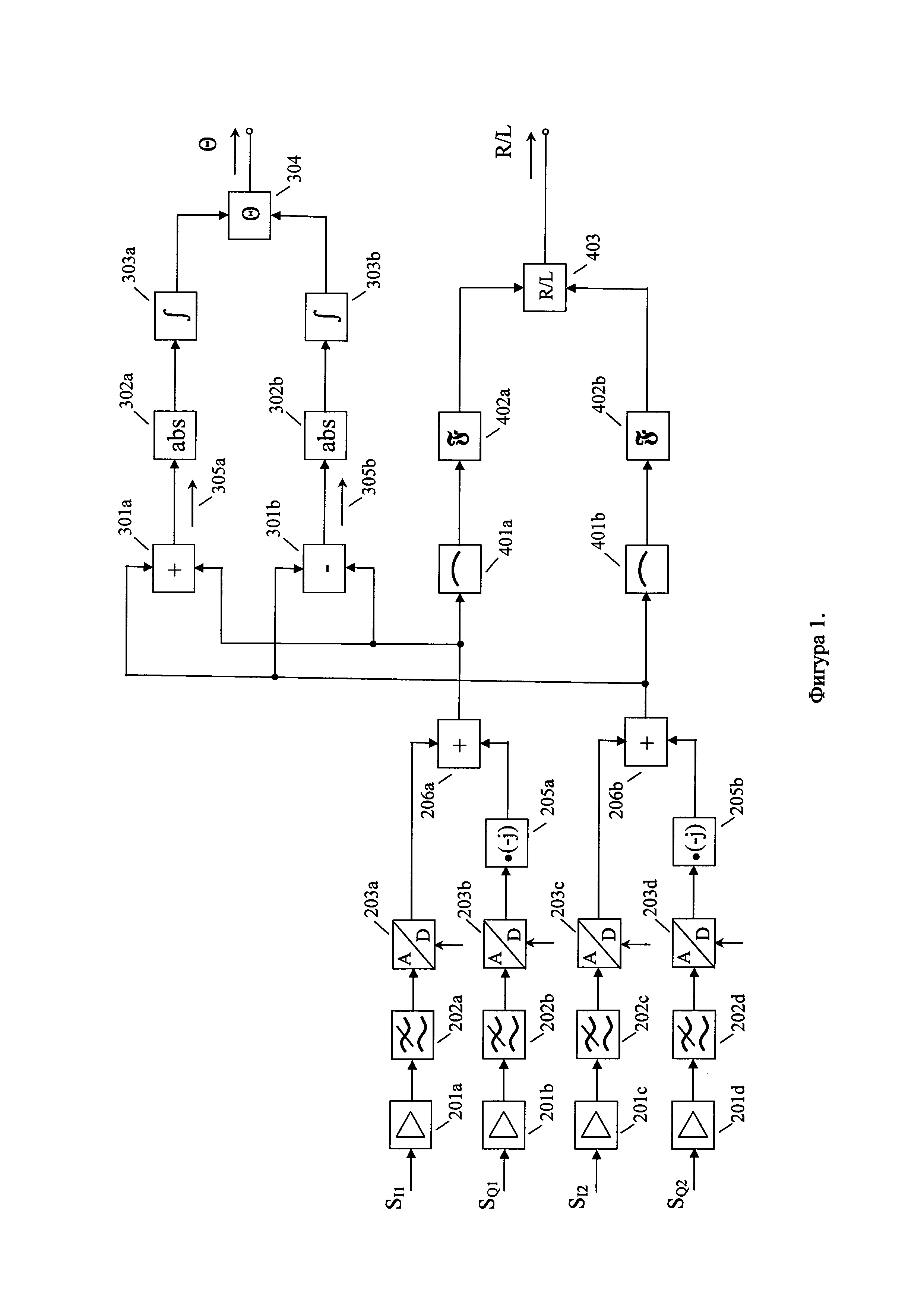
Известен способ обработки принимаемых радиолокационных сигналов в моноимпульсной РЛС, изложенный в заявке Германии DE 102005060875 A1, опубликованной 21.06.2007 г., "Verfahren und Vorrichtung zur Signalverarbeitung bei einer Winkelbestimmung mittels Mikrowellen-Bewegungssensoren" ("Метод и устройство обработки сигналов для определения угла микроволновыми подвижными сенсорами"), иллюстрируемый схемой, приведенной на рисунке из этой заявки (фиг. 1).
Согласно этому аналогу импульсные радиолокационные сигналы, принимаемые парциальными антеннами, составляющими антенну моноимпульсной РЛС, при каждом зондировании, с использованием стабилизированного генератора, формирующего несущую частоту зондирующих сигналов, переносятся на видеочастоту. При этом переносе формируются видеосигналы, соответствующие синфазной и квадратурной составляющим принимаемых сигналов в принимающих парциальных каналах. Для рассматриваемого в патенте варианта фазовой моноимпульсной системы с двумя парциальными приемными антеннами формируются видеосигналы: SI1, SQ1 (соответствующие синфазной и квадратурной составляющим сигналов, принимаемых первой парциальной антенной) и SI2, SQ2 (соответствующие синфазной и квадратурной составляющим сигналов, принимаемых второй парциальной антенной). Каждый из этих видеосигналов усиливается (на схеме фиг. 1 - элементы 201а-201d) в соответствующем приемном канале, подвергается в этом канале низкочастотной фильтрации (элементы 202а-202d) и затем аналого-цифровому преобразованию (элементы 203а-203d). Значения оцифрованных квадратурных частей сигналов первого (SQ1) и второго (SQ2) приемных каналов умножаются на -j (элементы 205а и 205b схемы) и суммируются (элементы 206а и 206b схемы) с соответствующими значениями оцифрованных синфазных частей сигналов первого (SI1) и второго (SI2) приемных каналов.
Формирующиеся соответственно на выходах элементов 206а и 206b схемы (фиг. 1) при каждом зондировании цифровые значения s1(ti) и s2(ti), представляющие собой результаты суммирования, поступают на входы суммирующего элемента 301а и вычитающего элемента 301b. На основе выполнения операции суммирования на выходе элемента 301а формируются оценки, соответствующие абсолютной величине суммарного сигнала SSUM(ti)=s1(ti)+s2(ti), а на основе выполнения операции вычитания на выходе элемента 301b формируются оценки
SDIFF(ti)=s1(ti)-s2(ti),
соответствующие абсолютной величине разностного сигнала в моноимпульсной РЛС.
Далее эти значения фильтруются с использованием метода скользящего среднего (соответственно элементами 303а и 303b на схеме фиг. 1) и на основе получаемых средних значений mSUM и mDIFF рассчитывается значение моноимпульсного отношения mSUM/mDIFF, с использованием которого формируется оценка абсолютного значения угла визирования наблюдаемого объекта относительно равносигнального направления антенны моноимпульсной РЛС.
Знак этого угла определяется с использованием сопоставительных оценок (элемент 403 на схеме фиг. 1) в частотной области аргументов комплексных величин (соответствующих преобразованным сигналам, поступающим с парциальных антенн моноимпульсной РЛС), получаемых путем (подпачечного) накопления значений s1(ti) и s2(ti) (в первом варианте предложенного в изобретении метода обработки), их оконной обработки (элементы 401а и 401b на схеме фиг. 1) и преобразования Фурье накопленных подпачек значений (элементы 402а и 402b).
К основным недостаткам данного изобретения могут быть отнесены:
- необходимость использования четырех каналов приема, усиления и преобразования поступающих на вход системы обработки радиолокационных сигналов в моноимпульсной РЛС, что требует повышенных аппаратурных затрат;
- необходимость обеспечения идентичности как амплитудных, так и фазовых характеристик каналов приема и усиления и преобразования сигналов: SI1, SQ1, SI2, SQ2,
- возможность возникновения дополнительных угловых ошибок моноимпульсного пеленгования в том случае, когда имеют место внешние и внутренние воздействия, искажающие фазовые соотношения сигналов, формирующих SSUM и SDIFF.
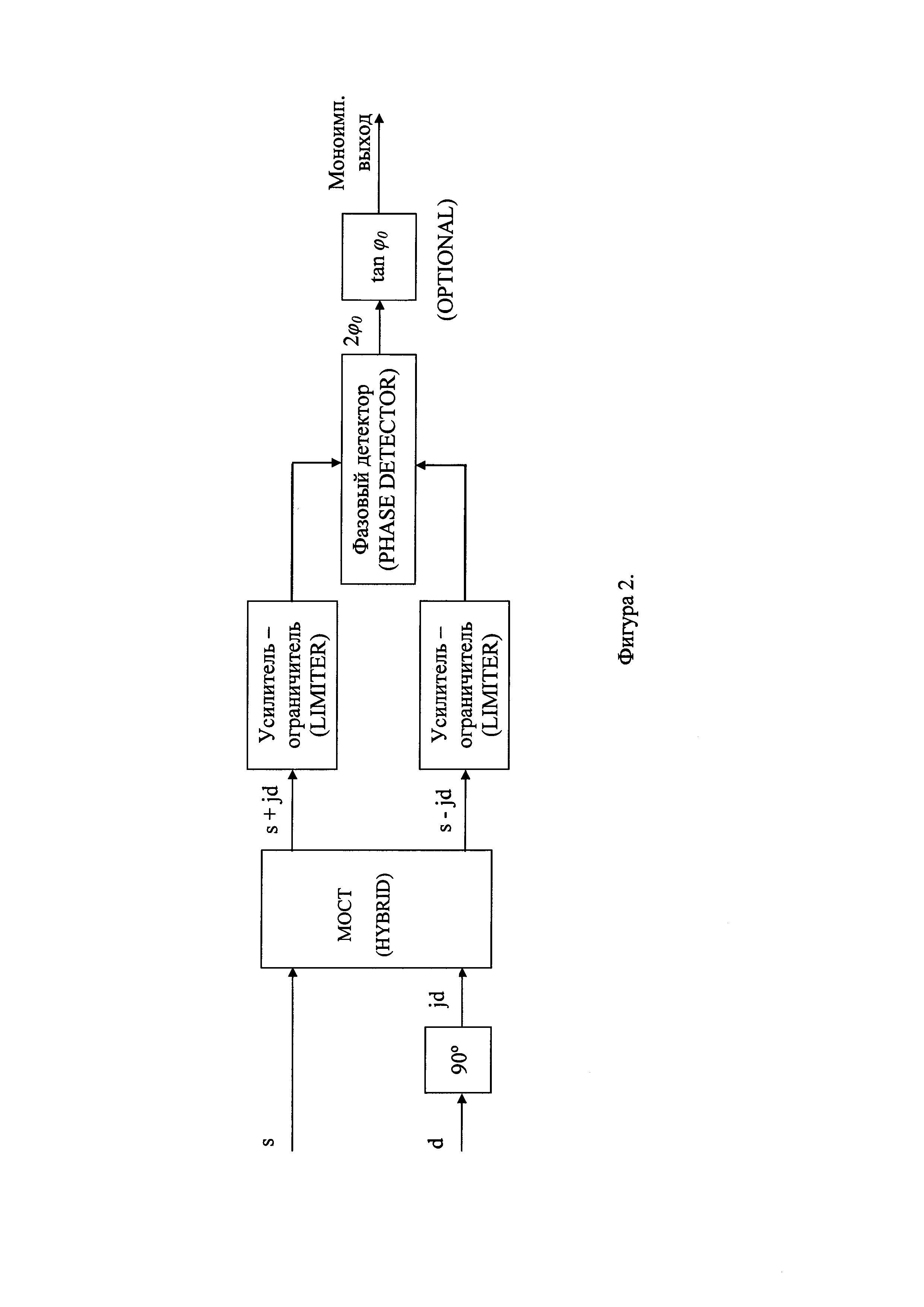
Известен способ обработки радиолокационных сигналов в моноимпульсной РЛС, описанный в источнике [Samuel М. Sherman, David K. Barton - Monopulse Principles and Techniques, sec.ed., Artech House, 2011, стр. 170]. Обработка радиолокационной информации по этому способу осуществляется в соответствии со схемой, приведенной на фиг. 2.
В соответствии с классификацией, используемой в указанном источнике, данный способ обработки радиолокационных сигналов относится к тому типу способов, который предполагает формирование и обработку суммы s+jd и разности s-jd комплексных огибающих s и d сигналов, поступающих соответственно с суммарного и разностного выходов суммарно-разностного преобразователя антенны моноимпульсной РЛС.
В случае амплитудного моноимпульсного пеленгования, когда фаза δd разностного сигнала d в условиях отсутствия помех и других каких-либо искажающих воздействий отличается от фазы δs суммарного сигнала s на величину 0° или 180° (δ=δd-δs=0°∨180°) с целью обеспечения возможности образования указанных комбинаций (суммы s+jd и разности s-jd) сигналов в прототипе осуществляется доворот фазы поступающего разностного сигнала на 90° и используется Т-мост (HIBRID).
Тангенс

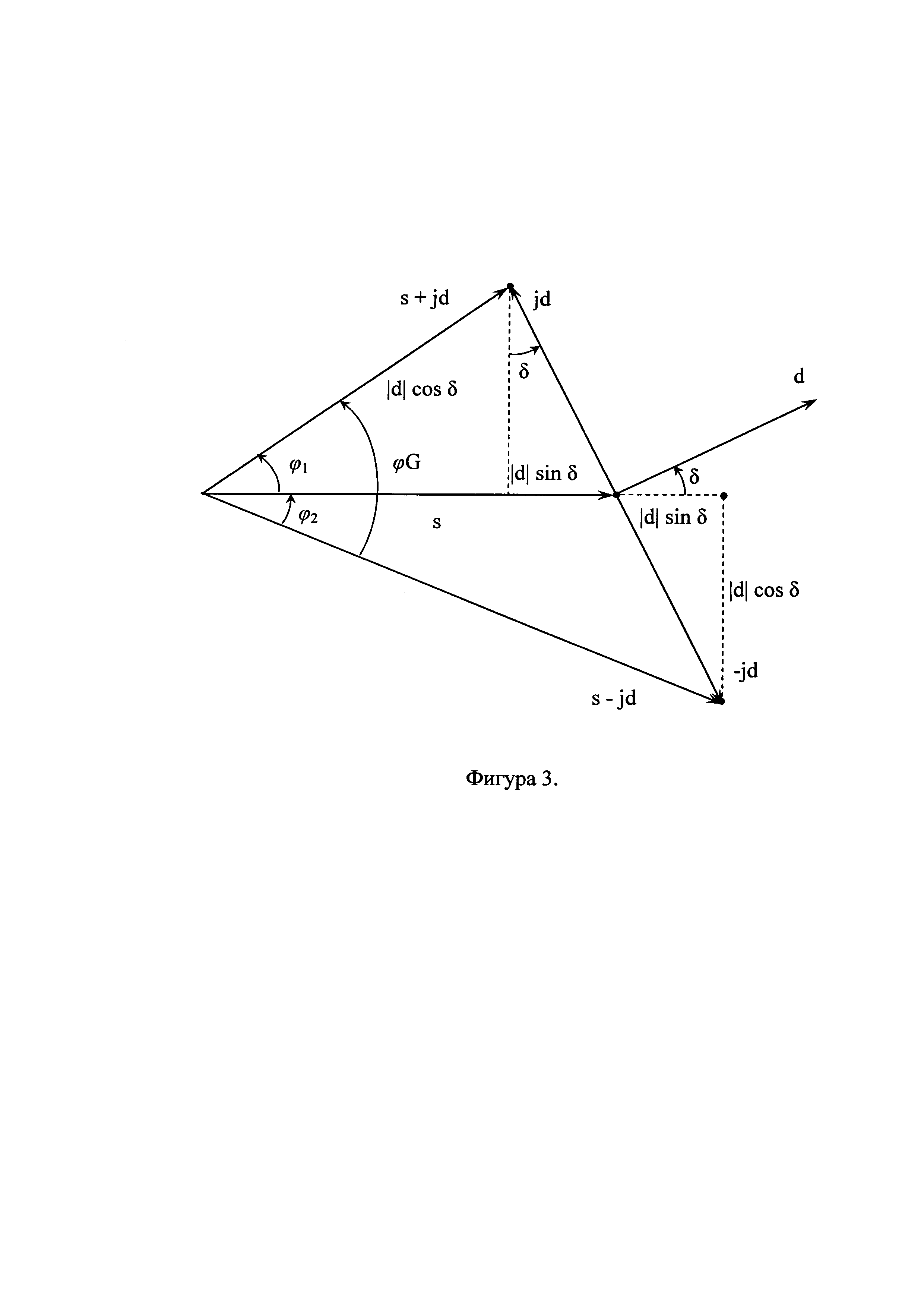
Основной недостаток данного способа указан в том же источнике [2, стр. 172]. Этот недостаток обусловлен тем, что условие синфазности - противофазности (или ортогональности) суммарного и разностного сигналов, поступающих из антенны моноимпульсной РЛС, может не выполняться, например, при наличии внешних мешающих воздействий или вследствие несовершенства антенно-фидерного тракта РЛС. Данный случай иллюстрируется в [2] диаграммой (фиг. 3). В условиях, соответствующих фиг. 3, вычисление ϕ0, как
Для уменьшения влияния амплитуд суммы s+jd и разности s-jd сигналов при получении оценок их относительной фазы (2ϕ0) усиление этих комбинаций сигналов осуществляется в приемных каналах с жестким ограничением. При этом возможно подавление слабых полезных сигналов мешающими сильными.
Существенным недостатком рассматриваемого аналога, как и предыдущего, является также зависимость результатов оценки моноимпульсного отношения суммарного и разностного сигналов от величины фазового разбаланса приемных каналов РЛС.
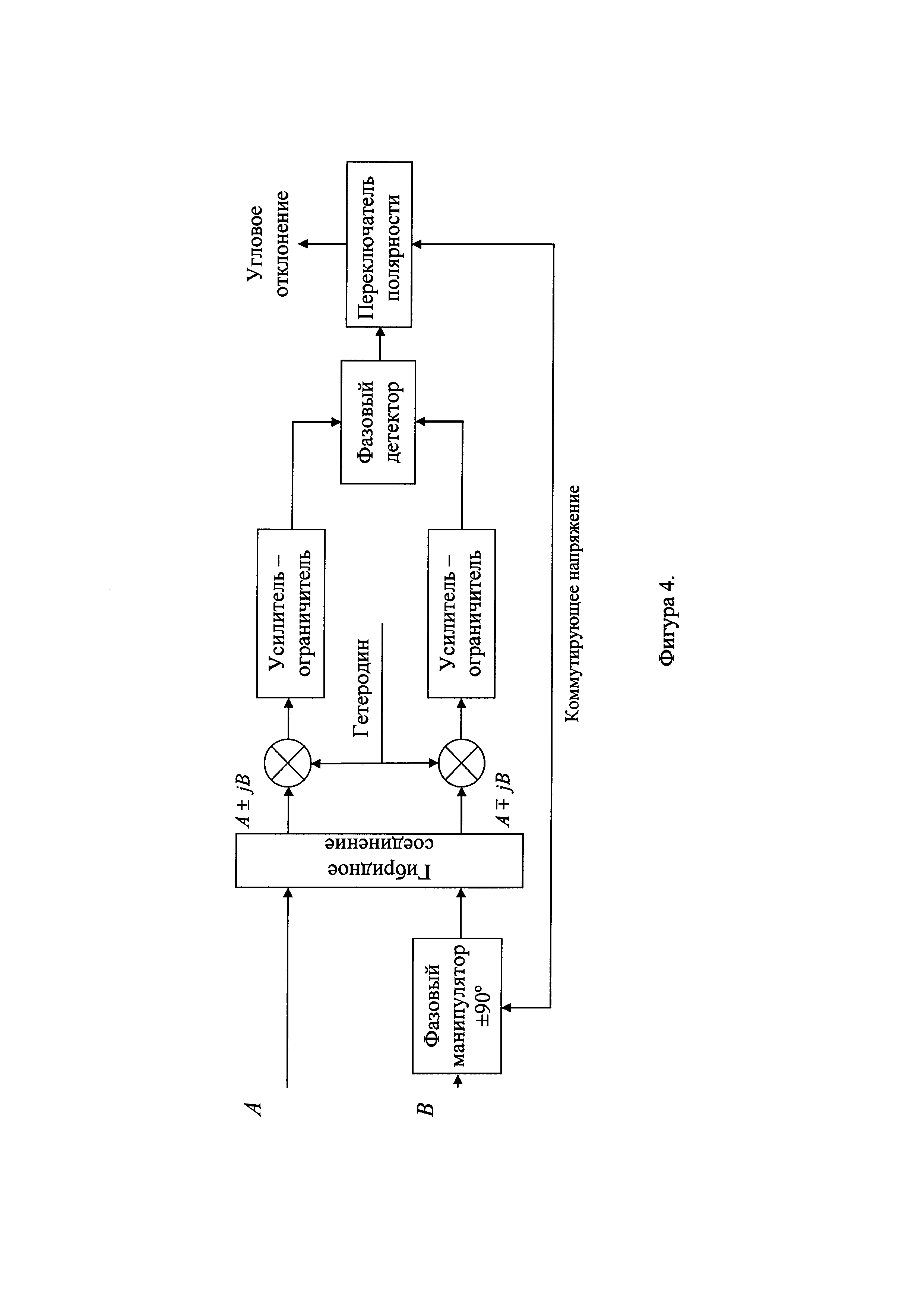
Вариант устранения этого недостатка изложен в источнике [Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970: Пер. с англ. (в четырех томах) / Том 3. Радиолокационные устройства и системы / Под ред. А.С. Виницкого. - М.: Сов. радио, 1979, стр. 185]. Способ обработки радиолокационной информации, изложенный в этом источнике, является наиболее близким к предлагаемому способу обработки радиолокационной информации в моноимпульсной РЛС и рассматривается в качестве прототипа.
Обработка радиолокационной информации по способу прототипа осуществляется в соответствии со схемой, приведенной на фиг. 4.
Способ обработки радиолокационных сигналов, рассматриваемый в качестве прототипа, в соответствии с классификацией, используемой в источнике [2], также относится к тому типу способов, который предполагает формирование и обработку суммы s+jd и разности s-jd комплексных огибающих s и d сигналов, поступающих соответственно с суммарного и разностного выходов суммарно-разностного преобразователя антенны моноимпульсной РЛС.
Этот способ отличается от способа обработки радиолокационных сигналов в моноимпульсной РЛС, предложенного в источнике [2] и изложенного выше, тем, что с целью коррекции фазовых ошибок (фазового рассогласования) приемных каналов в канал поступления принимаемого разностного сигнала включен фазовый манипулятор на ±π/2, а знак углового отклонения направления на объект радиолокационного моноимпульсного пеленгования формируется с использованием переключателя полярности сигнала ошибки, работа которого синхронизирована с работой фазового манипулятора. Кроме того, в процессе обработки сигналов, поступающих с выходов суммарно-разностного преобразователя антенны моноимпульсной РЛС, осуществляется их перенос на промежуточную частоту. В остальном, способ-прототип обладает теми же недостатками, что и способ, указанный в источнике [2].
Задачей настоящего изобретения является обеспечение возможности повышения точности оценки моноимпульсного отношения суммарного и разностного сигналов при наличии воздействий, нарушающих требуемые фазовые соотношения суммарного и разностного сигналов, поступающих из антенны моноимпульсной РЛС, а также фазового рассогласования приемных каналов.
Целью (техническим результатом) настоящего изобретения являются расширение возможностей применения и повышение точности пеленгования моноимпульсной РЛС.
Для достижения заявленной цели в соответствии с настоящим изобретением при приеме и обработке радиолокационных сигналов в моноимпульсной РЛС (во временных промежутках между излучением зондирующих импульсов) осуществляются:
- череспериодная (от зондирования к зондированию) фазовая манипуляция


- образование сумм и разностей этих сигналов с суммарными сигналами


- перенос сигналов, полученных в результате указанных сложения и вычитания, на промежуточную частоту соответственно в первом и втором приемных каналах, их усиление на промежуточной частоте, синхронное детектирование;
- аналого-цифровое преобразование вещественных и мнимых частей (квадратур) результирующих усиленных и продетектированных сигналов, их цифровое сжатие (в случае использования внутриимпульсной модуляции) в каждом интервале приема радиолокационных сигналов с образованием отсчетов вещественных


- когерентное накопление в каждом (m-ом,




- время-частотное преобразование накопленных подпачек в каждом приемном канале и каждом канале дальности, включающее в себя оконное взвешивание этих подпачек и их быстрое преобразование Фурье (БПФ);
- формирование в каждом канале дальности

- формирование в каждом канале дальности
- вычисление моноимпульсных отношений и пеленгов, соответствующих сигналам, поступающим с суммарного и разностного выходов антенны моноимпульсной РЛС.
Содержание настоящего изобретения поясняется следующими схемами и диаграммами:
Фиг. 1 - Общая схема обработки радиолокационных сигналов в моноимпульсной РЛС согласно аналогу [1];
Фиг. 2 - Общая схема обработки радиолокационных сигналов в моноимпульсной РЛС согласно аналогу [2];
Фиг. 3 - Векторная диаграмма, иллюстрирующая процесс обработки радиолокационных сигналов в моноимпульсной РЛС в соответствии с аналогом [2];
Фиг. 4 - Общая схема обработки радиолокационных сигналов в моноимпульсной РЛС согласно прототипу;
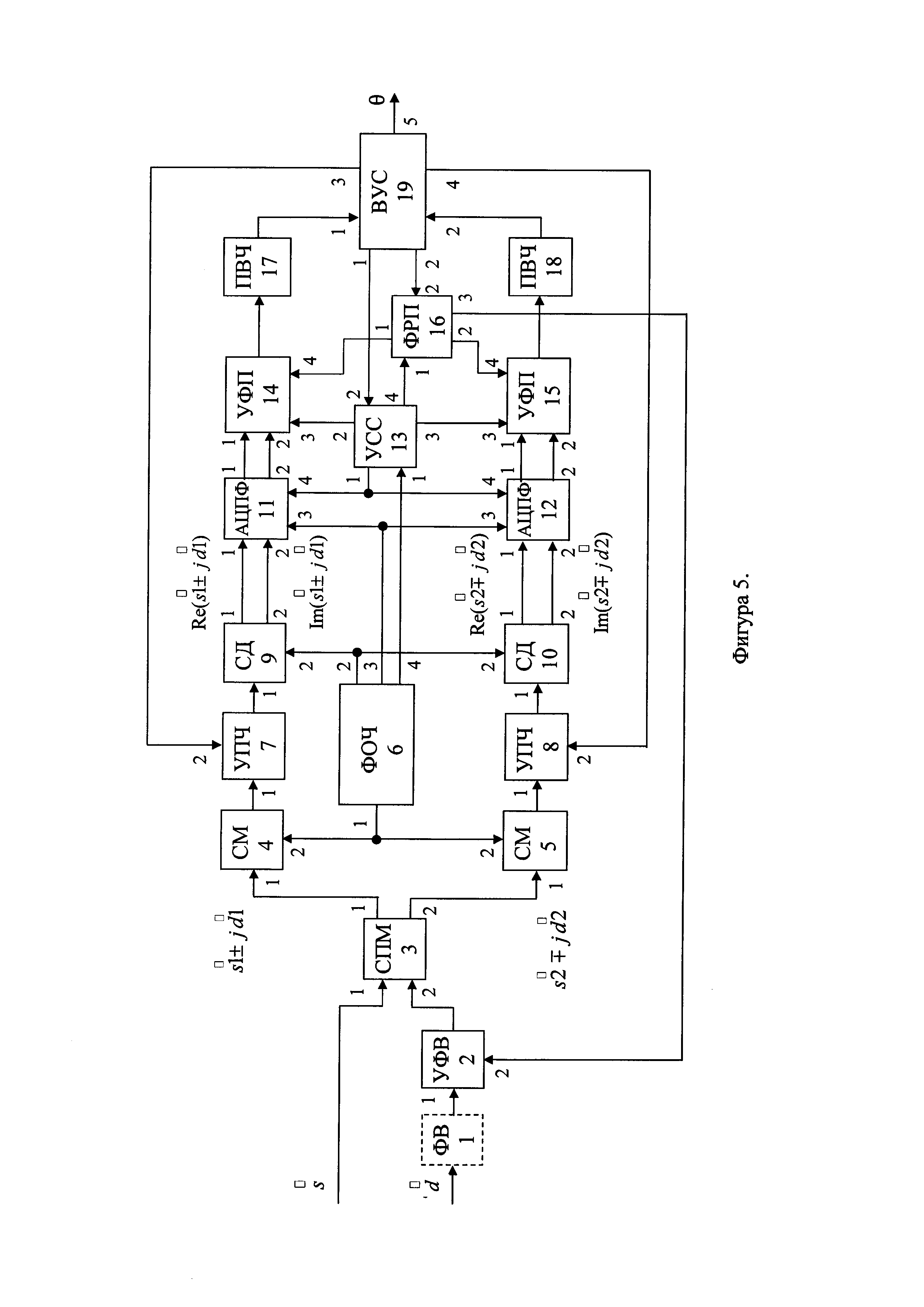
Фиг. 5 - Пример устройства, схема обработки радиолокационных сигналов в котором соответствует первому варианту реализации способа, предлагаемого в настоящем изобретении;
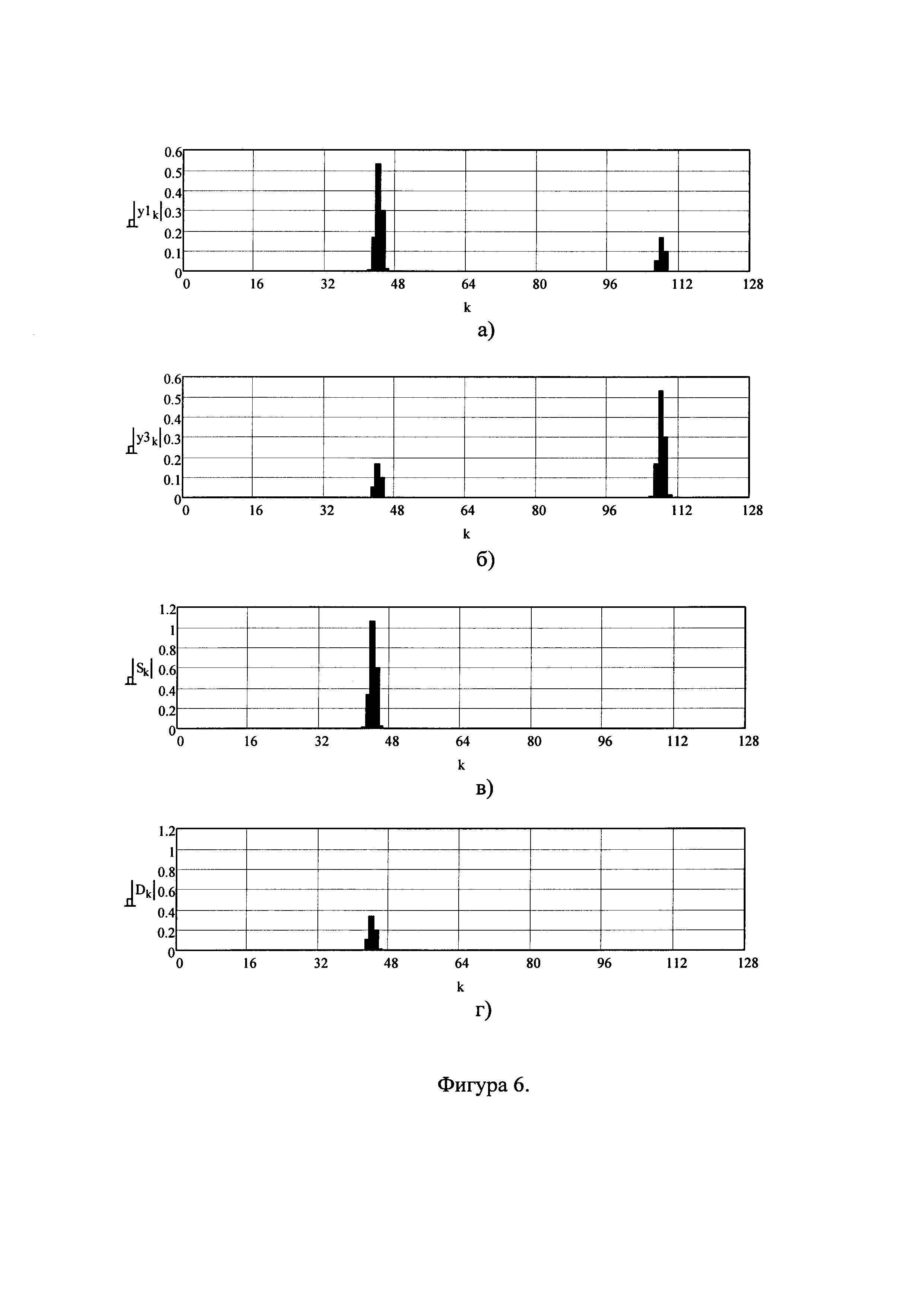
Фиг. 6 - Примеры распределения откликов принимаемых радиолокационных сигналов, формируемых в результате использования предлагаемого способа обработки сигналов в частотной области, при регулярной череспериодной манипуляции сигналов, поступающих с разностного выхода антенны моноимпульсной РЛС.
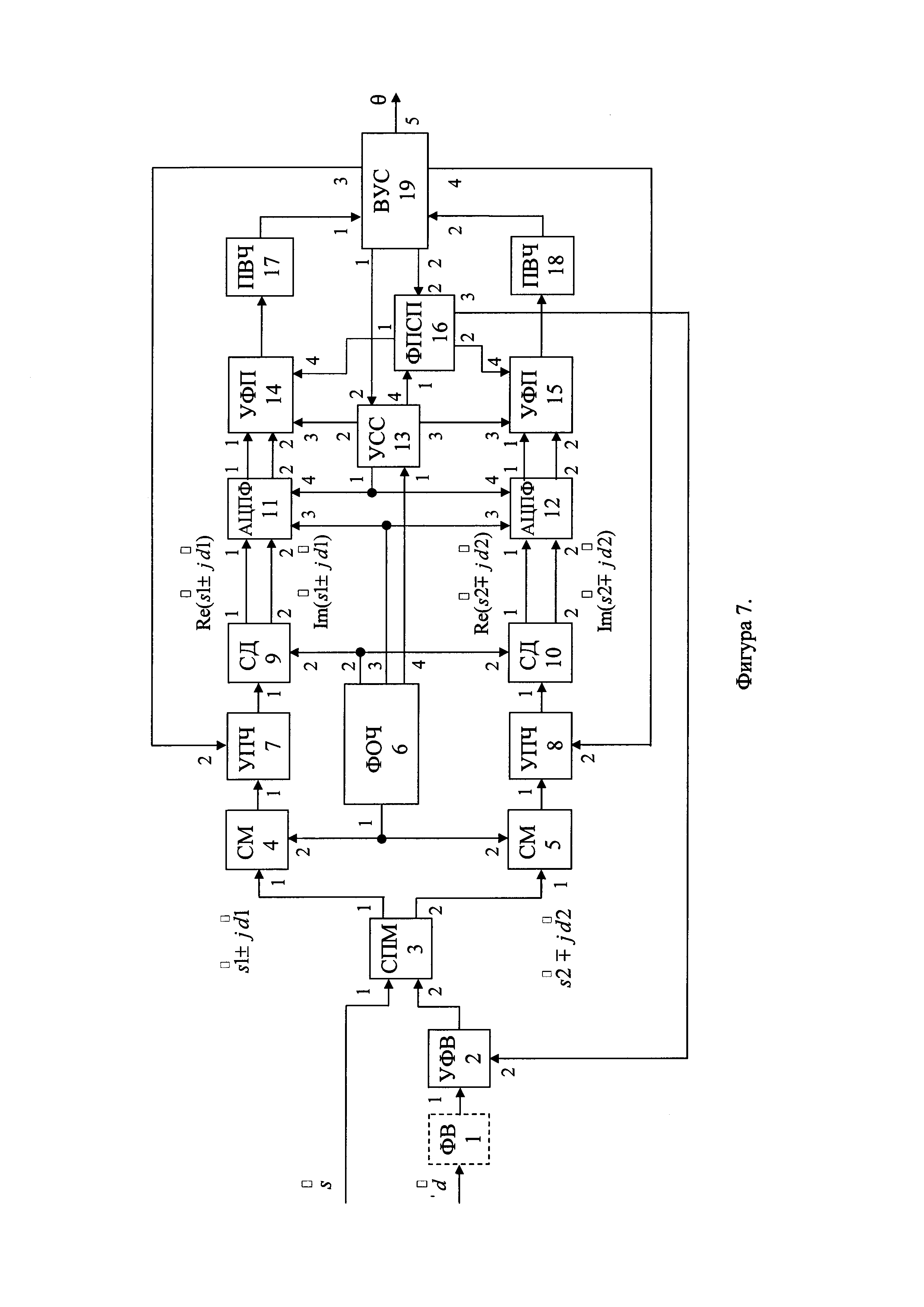
Фиг. 7 - Пример устройства, схема обработки радиолокационных сигналов в котором соответствует второму варианту реализации способа, предлагаемого в настоящем изобретении;
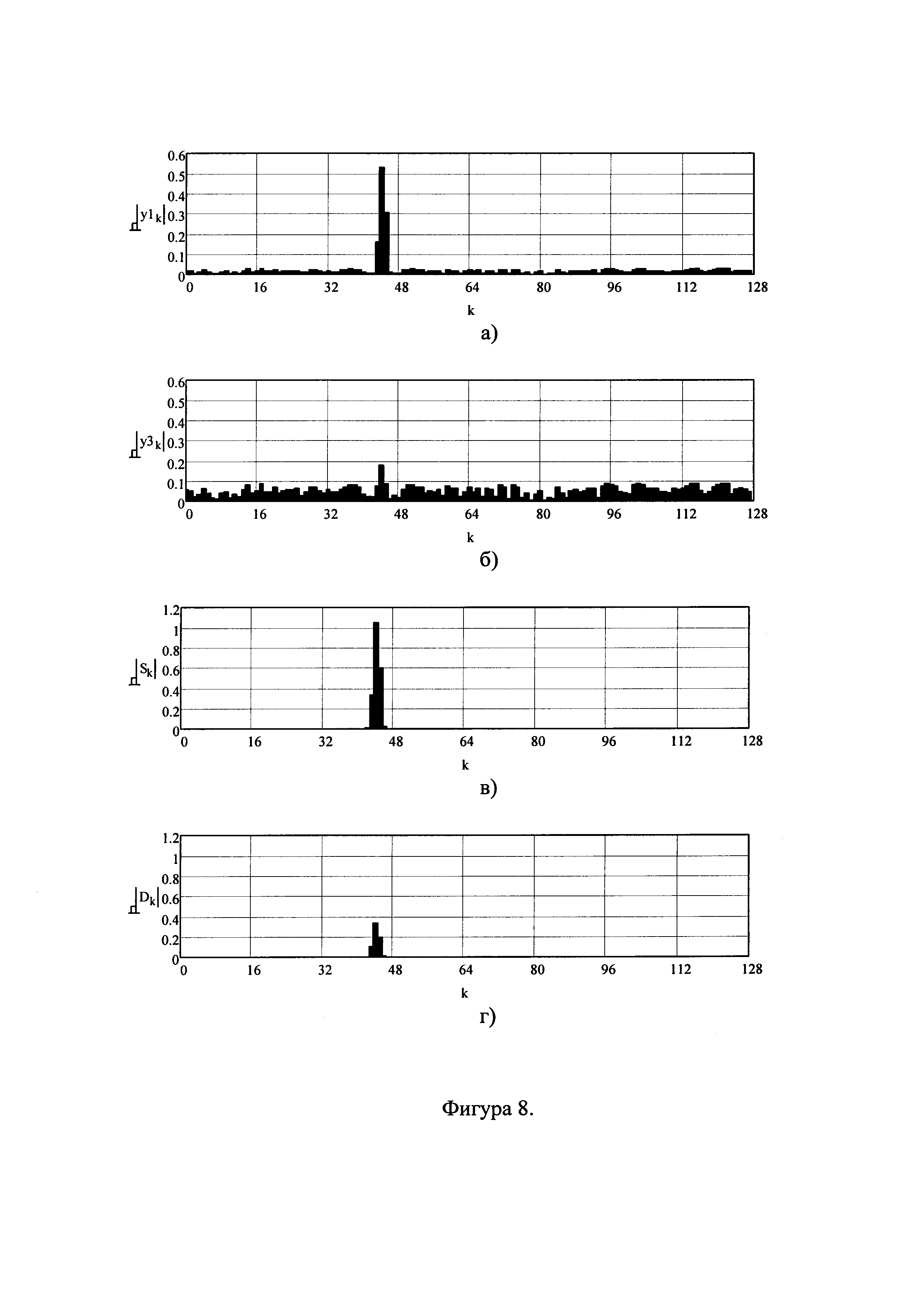
Фиг. 8 - Примеры распределения откликов принимаемых радиолокационных сигналов, формируемых в результате использования предлагаемого способа обработки сигналов в частотной области, при псевдослучайной череспериодной манипуляции сигналов, поступающих с разностного выхода антенны моноимпульсной РЛС.
Достижение технического результата настоящего изобретения в первом варианте его реализации может быть получено, с использованием устройства, обработка радиолокационных сигналов в котором иллюстрируется фиг. 5. На фиг. 5:
1 - фазовращатель (ФВ);
2 - управляемый фазовращатель (УФВ);
3 - синфазно-противофазный мост (СПМ);
4, 5 - смесители (СМ);
6 - формирователь опорных частот (ФОЧ);
7, 8 - усилители промежуточной частоты (УПЧ);
9, 10 - синхронные детекторы (СД);
11, 12 - устройства аналого-цифрового преобразования и согласованной фильтрации (АЦПФ);
13, 14 - управляемые формирователи подпачек (УФП);
15 - устройство стробирования и синхронизации (УСС);
16 - формирователь регулярной последовательности (ФРП);
17, 18 - преобразователи время-частота (ПВЧ);
19 - вычислительно-управляющая система (ВУС).
В рамках предлагаемого способа обработки радиолокационных сигналов в моноимпульсной РЛС предполагается, что после суммарно-разностного преобразования принимаемых радиолокационных сигналов в антенне моноимпульсной РЛС с суммарного и разностного выходов этой антенны в обработку поступают суммарный и разностный сигналы, представленные соответственно их комплексными огибающими:
Представленный на фиг. 5 вариант устройства, реализующего обработку сигналов в моноимпульсной РЛС в соответствии с первым вариантом реализации предлагаемого способа, функционирует следующим образом.
1. С выхода фазовращателя 1 (при наличии такового) разностный сигнал


2. С выхода управляемого фазовращателя 2 сигнал



3. Сигналы, соответствующие




4. Выходные сигналы смесителей 4 и 5 поступают на первые входы усилителей промежуточной частоты (УПЧ) соответственно 7 и 8, на вторые входы которых поступают соответственно с выходов 2 и 3 вычислительно-управляющей системы (ВУС) 19 сигналы (или команды), обеспечивающие необходимую регулировку коэффициентов усиления УПЧ.
5. С выходов усилителей промежуточной частоты 7 и 8 усиленные сигналы поступают на первые входы синхронных детекторов (СД) соответственно 9 и 10, на вторые входы которых со второго выхода высокостабильного формирователя опорных частот 6 поступает высокостабильный опорный сигнал промежуточной частоты, обеспечивающий формирование на выходах 1 и 2 синхронных детекторов 9 и 10 видеосигналов, соответствующих:
- вещественной
- вещественной
6. Видеосигналы с выходов 1 и 2 синхронных детекторов 9 и 10 поступают на входы 1 и 2 соответствующих устройств 11 и 12 (АЦПФ) двухканального аналого-цифрового преобразования и согласованной фильтрации (сжатия) принимаемых сигналов. Эта фильтрация осуществляется при использовании в моноимпульсной РЛС зондирующих радиолокационных сигналов с внутриимпульсной модуляцией.
Сигналы, поступившие с выходов 1 и 2 синхронных детекторов 9 и 10 оцифровываются соответственно в АЦПФ 11 и 12 двухканальными аналого-цифровыми преобразователями на временных интервалах приема (располагающихся в промежутках между излучением зондирующих импульсов), соответствующих стробу приема, формируемому в соответствии с управляющими сигналами, поступающими на входы 4 АЦПФ 11 и 12 с выхода 1 устройства стробирования и синхронизации (УСС) 13, работа которого, в свою очередь, синхронизируется сигналами, поступающими на вход 1 УСС 13 с выхода 4 ФОЧ 6.
Аналого-цифровое преобразование квадратур (вещественной и мнимой частей сигналов) сигналов


Для случая использования радиолокационных сигналов с внутриимпульсной модуляцией
7. Оцифрованные комплексные огибающие
В управляемых формирователях подпачек 14 и 15, работа которых синхронизируется сигналами, поступающими на их третий вход с выходов 2 и 3 устройства стробирования и синхронизации (УСС) 13, в каждом (m-ом,



При этом формируются последовательности (подпачки) оцифрованных значений сигналов:
- в первом приемном канале:
- во втором приемном канале:


где:
n - порядковый номер интервала приема (зондирования) в подпачке
Cn - коэффициенты (Cn=(-1)n или Cn=(-1)n+1), значения которых (+1 или -1) на n-ом интервале приема
Одновременно управляемыми формирователями подпачек 14 и 15, с использованием цифрового гетеродинирования формируются последовательности (подпачки) значений соответственно:
- в первом приемном канале:

- во втором приемном канале:

Значения коэффициентов Cn при этом поступают на входы 4 УФП 14 и 15 соответственно с выходов 1 и 2 ФРП 16.
При формировании накапливаемых подпачек значений

Необходимо отметить, что с учетом ортогональности


Далее индекс канала дальности (m) для упрощения обозначений опускается.
Сформированные в каждом канале дальности подпачки




В преобразователях время-частота 17 и 18 эти подпачки значений подвергаются оконному взвешиванию с использованием окон типа Хемминга, Кайзера и др., и затем быстрому преобразованию Фурье (БПФ). Число точек БПФ соответствует размеру (N) накопленных подпачек.
В результате каждому каналу дальности сопоставляется совокупность отсчетов (откликов на выходах цифровых фильтров, формируемых БПФ) в частотных областях, соответствующих:
- результатам преобразований время-частота подпачек значений
- результатам преобразований время-частота подпачек значений
Здесь:
Wn,
На фиг. 6а) и фиг. 6б) показаны примеры распределения в одном канале дальности абсолютных значений



Максимальные по уровню отклики на фиг. 6а) и фиг. 6б) сформированы в первом приемном канале, сигналом, поступающим с суммарного выхода антенны моноимпульсной РЛС.
В частотной области



Распределение по частотным фильтрам откликов





При выровненных амплитудно-фазовых характеристиках приемных каналов моноимпульсной РЛС:
- абсолютные значения откликов




- отклики, формируемые в фильтрах частотной области


- отклики, формируемые составляющими разностных сигналов в фильтрах указанных частотных областей в первом и втором приемных каналах, являются противофазными;
- отклики, формируемые в фильтрах частотной области


- отклики, формируемые составляющими суммарных сигналов в фильтрах указанных частотных областей в первом и втором приемных каналах, являются синфазными.
9. Результаты время-частотного преобразования оцифрованных сигналов в каждом канале дальности с выходов преобразователей время-частота 17 и 18 поступают соответственно на входы 1 и 2 вычислительно-управляющей системы (ВУС) 19.
Задачей, решаемой ВУС в плане обработки сигналов моноимпульсной РЛС, является вычисление моноимпульсного отношения, характеризующего величину и направление угла отклонения линии визирования цели от равносигнального направления антенны моноимпульсной РЛС в рассматриваемой плоскости пеленгования и, затем, пеленга наблюдаемой цели в этой плоскости.
Путем осуществления суммирования значений отсчетов




Составляющие, соответствующие разностным сигналам в частотных областях


Путем определения разности значений отсчетов




Составляющие, соответствующие суммарным сигналам в частотных областях


На фиг. 6в) и фиг. 6г) показаны примеры распределения в одном канале дальности абсолютных значений







Отношение



Следует также отметить, что величина отношения
Фазовые соотношения оценок аргументов комплексных огибающих


В условиях отсутствия искажений, иллюстрируемых фиг. 3, имеет место равенство
Оценка знака угла (направления) отклонения линии визирования цели от равносигнального направления антенны моноимпульсной РЛС формируется ВУС 19 по соотношению
в котором значения аргументов (arg( )) и их разности измеряются в интервале (-π, …, π].
Знак этого соотношения не изменяется при появлении воздействий, искажающих фазовые соотношения между сигналами, поступающими с суммарного и разностного выходов антенны моноимпульсной РЛС, как это показано на фиг. 3, в пределах

С использованием этой оценки моноимпульсного отношения, а также априорных данных о крутизне пеленгационной характеристики антенны моноимпульсной РЛС, ВУС 19 определяет пеленг Θ на объект радиолокационного наблюдения в соответствующей плоскости пеленгования.
В качестве недостатка изложенного варианта реализации заявляемого способа обработки радиолокационных сигналов можно рассматривать регулярность фазовой манипуляции сигнала, поступающего с разностного выхода антенны моноимпульсной РЛС (через период зондирования). Данное обстоятельство потенциально может быть использовано при постановке помех моноимпульсной РЛС.
Устранение этого недостатка достигается в другом варианте реализации предлагаемого способа обработки радиолокационных сигналов.
В этом варианте на вход 2 управляемого фазовращателя (УФВ) 2 поступают управляющие сигналы, обеспечивающие вместо регулярной череспериодной фазовой манипуляции сигналов, поступающих с разностного выхода антенны моноимпульсной РЛС, череспериодную манипуляцию их фазы по некоторому более сложному, например, псевдослучайному закону.
При этом последовательность {Cn},

Отличие схемы построения устройства (см. фиг. 7), реализующего рассматриваемый вариант реализации предлагаемого способа обработки радиолокационных сигналов в моноимпульсной РЛС, от схемы построения устройства, приведенного на фиг. 5 заключается в том, что формирователь регулярной последовательности (ФРП) 16 управляющих сигналов заменен на формирователь псевдослучайной последовательности (ФПСП) 16.
В рассматриваемом варианте предлагаемого способа обработки радиолокационных сигналов в моноимпульсной РЛС:
- УФВ 2 осуществляет поворот фазы разностного сигнала на величину +90° или -90° относительно фазы суммарного сигнала в соответствии с управляющим сигналом, поступающим на второй вход УФВ 2 с выхода 3 формирователя псевдослучайной последовательности (ФПСП) 16;
- УФП 14 и 15 при формировании подпачек




На фиг. 8а) и фиг. 8б) показаны примеры распределения в одном канале дальности абсолютных значений


Максимальный по уровню отклик на фиг. 8а) соответствует сигналу на выходе первого приемного канала, поступающему с суммарного выхода антенны моноимпульсной РЛС. Отклики, равномерно распределенные по всей частотной области, сформированной ПВЧ 17, соответствуют сигналу, поступающему с разностного выхода антенны моноимпульсной РЛС, фазоманипулированному по псевдослучайному закону управляемым фазовращателем (УФВ) 2, показанным на фиг. 5. Максимальная величина этих откликов, очевидно, уменьшается при уменьшении абсолютной величины угла отклонения направления на цель от равносигнального направления антенны моноимпульсной РЛС.
Максимальный по уровню отклик на фиг. 8б) соответствует сигналу на выходе первого приемного канала, поступающему с разностного выхода антенны моноимпульсной РЛС. Отклики, равномерно распределенные по всей частотной области, сформированной ПВЧ 17, соответствуют сигналу, поступающему с суммарного выхода антенны моноимпульсной РЛС, фазоманипулированному по псевдослучайному закону процедурой домножения накопленных отсчетов

Распределения абсолютных значений соответственно откликов


Осуществляя, как и ранее, суммирование и вычитание результатов время-частотных преобразований, полученных в одноименных частотных фильтрах, ВУС 19 формирует в каждом канале дальности оценки абсолютного значения величин


а также моноимпульсное отношение по тому же самому соотношению, что и в случае использования регулярной череспериодной фазовой манипуляции сигналов, поступающих с разностного выхода антенны моноимпульсной РЛС.
На фиг. 8в) и фиг. 8г) показаны примеры распределения в одном канале дальности абсолютных значений





Как следует из изложенного, при применении заявляемого способа обработки радиолокационных сигналов в моноимпульсной РЛС по сравнению с прототипом:
- обеспечивается возможность получения правильных оценок моноимпульсных отношений принимаемых сигналов при наличии существенных отклонений фазовых соотношений суммарных и разностных сигналов, поступающих с соответствующих выходов суммарно-разностного преобразователя антенны моноимпульсной РЛС, от требуемых;
- формируемые оценки моноимпульсных отношений обладают устойчивостью при наличии амплитудных флуктуаций сигналов, принимаемых антенной моноимпульсной РЛС, обеспечивается усреднение этих оценок за время накопления подпачек принимаемых радиолокационных сигналов;
- обеспечивается возможность радиолокационного пеленгования одновременно наблюдаемых объектов, находящихся на одной и той же дальности от моноимпульсной РЛС, но имеющих разные радиальные скорости движения относительно этой РЛС.
Указанные преимущества заявляемого способа обработки радиолокационных сигналов в моноимпульсной РЛС обеспечивают достижение технического результата настоящего изобретения, а именно - расширение возможностей применения и повышение точности пеленгования моноимпульсными РЛС.
Следует также отметить, что обработка радиолокационных сигналов в моноимпульсной РЛС, реализуемая в соответствии с заявляемым способом, может быть осуществлена на существующей элементной базе и не требует больших аппаратурных затрат.
Источники информации
1. Заявка Германии DE 102005060875 А1, опубл. 21.06.2007 г. "Verfahren und Vorrichtung zur Signalverarbeitung bei einer Winkelbestimmung mittels Mikrowellen-Bewegungssensoren".
2. Samuel M. Sherman, David K. Barton - Monopulse Principles and Techniques, sec.ed., Artech House, 2011.
3. Патент США US 5402130, опубл. 28.03.1995 г., "Monopulse processor".
4. Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970: Пер. с англ. (в четырех томах); том 3. Радиолокационные устройства и системы / Под ред. А.С. Виницкого. - М.: Сов радио, 1979.
Реферат
Изобретение относится к радиолокационной технике и может быть использовано в моноимпульсных РЛС. Достигаемый технический результат - расширение возможностей и повышение точности моноимпульсного пеленгования. Технический результат достигается с использованием фазовой манипуляции сигнала, поступающего с разностного выхода антенны моноимпульсной РЛС, векторного сложения этого фазоманипулированного сигнала с использованием 3 дБ моста с сигналом, поступающим с суммарного выхода антенны моноимпульсной РЛС, переноса результирующих сигналов на промежуточную частоту, их усиления, синхронного детектирования, аналого-цифрового преобразования, когерентного подпачечного накопления оцифрованных значений результирующих сигналов, время-частотного преобразования накопленных значений результирующих сигналов, вычисления моноимпульсных отношений с учетом фазовых соотношений сигналов в сформированной частотной области. 1 з.п. ф-лы, 8 ил.
Формула


Комментарии