Способ обнаружения нескольких целей, используемыйпрежде всего в обзорных радиолокаторах с большим количеством лучей, формируемых по углу места - RU2317565C2
Код документа: RU2317565C2
Чертежи


Описание
Настоящее изобретение относится к радиолокационному способу обнаружения целей. Изобретение можно использовать в обзорных радиолокаторах, например в радиолокаторах с большим количеством лучей, формируемых по углу места, а также в радиолокаторах любого иного типа.
Рассматриваемый в заявке в качестве примера обзорный радиолокатор представляет собой многолучевой радиолокатор с вращающейся антенной, задачей которого является обнаружение целей, расположенных от него на большом расстоянии. Обычно траектории цели формируются путем комбинирования графиков цели, построенных по принятым в отдельных развертках радиолокационным сигналам, с использованием фильтра траектории и логики ее инициирования.
Таким образом, традиционная процедура обнаружения цели состоит из трех стадий пороговой классификации: определение порога интенсивности сигнала на уровне всплеска, пороговая классификация после бинарного интегрирования на уровне графика и пороговая классификация после бинарного интегрирования на уровне траектории. Обнаружение цели в одной развертке обзорной радиолокационной системы выполняется бинарным интегрированием обнаружений цели, так называемых всплесков, в последовательных когерентных интервалах обработки развертки. Каждая развертка обзорного радиолокатора состоит из большого числа когерентных интервалов обработки, или пакетов, каждый из которых покрывает опорный интервал. Поскольку опорная ширина луча радиолокатора в азимуте обычно в несколько раз превышает размер опорного интервала пакета, принятый сигнал цели может быть представлен некоторым количеством последовательных пакетов развертки, или Nb пакетов на одну цель. В системах обнаружения с импульсно-доплеровским обзорным радиолокатором принимаемый сигнал в доплеровско-диапазонном кадре (сигнал, несущий информацию о скорости цели и расстоянии до нее), получают из каждого пакета после соответствующей выборки в требуемом диапазоне с применением блока доплеровских фильтров. Обнаружение всплеска фиксируется при определенном диапазоне и доплеровской скорости в кадре, когда принятый сигнал превышает некоторый порог, который определяют заранее по уровню всплеска с учетом вероятности ложной тревоги.
Обнаружение цели в развертке и в графике фиксируется в том случае, если для одного и того же расстояния и доплеровской скорости в Nb последовательных пакетах присутствует Nh всплесков. В том случае, когда сигнал принимают с использованием одновременного электронного формирования множества лучей по углу места, необходимо, чтобы всплески были получены от сигнала, принимаемого в одном и том же луче по углу места. Параметры Nb и Nh, а также порог на уровне всплеска выбираются таким образом, чтобы при этом на уровне графика была гарантирована определенная вероятность ложной тревоги.
Полученный график цели используется для инициализации фильтра траектории (траекторного фильтра). Предсказание траекторного фильтра для следующих разверток используют для идентификации возможных графиков цели, которые можно связать с траекторией. После анализа Ns разверток, включая развертку, по которой был сформирован начальный график, при получении Np графиков из возможных Ns разверток, связанных с траекторией, фиксируется подтвержденное обнаружение траектории цели. Параметры Np и Nsи вероятность ложной тревоги на уровне графика выбираются таким образом, чтобы гарантировать определенную вероятность ложной тревоги на уровне траектории.
Другой способ обнаружения целей, который основан на использовании вместо обычной трехстадийной схемы траекторного обнаружения одностадийной схемы "Траектория-Перед-Обнаружением", называемый схемой или методом ТПО, включает только пороговую классификацию интенсивности сигнала на уровне траектории. При обнаружении цели методом ТПО выполняют пороговую классификацию интегрированного сигнала цели, в котором информация о высоте цели, ее дальности и доплеровской скорости (доплере) представлена в виде Nb пакетов цели в Ns развертках, по которым выполняется интегрирование. Хорошо известно, что при определенной задержке пороговой классификации и проявлении сигнала цели вероятность обнаружения цели можно существенно увеличить по сравнению с многостадийными схемами траекторного обнаружения, оставляя при этом неизменной вероятность ложной тревоги. Метод ТПО описан, например, у Blackman S.S. и Popoli R. в "Design and Analasys of Modern Tracking Systems", Norwood, MA, изд-во Artech House, 1999.
Четырехмерное пространство измерений можно определить как пространство, разделенное на ячейки дальность-азимут-угол высоты-доплер, или радиолокационные ячейки (элементы разрешения радиолокационной системы). Размер радиолокационной ячейки определяется соответствующими значениями элемента дискретизации по дальности и доплеру в параметрах дальности и доплера, азимутальным интервалом пакета в азимуте и шириной луча по углу места. Центры радиолокационных ячеек по дальности и доплеру совпадают с центрами элементов дискретизации в кадре дальность-доплер, и по высоте - с центрами лучей по углу места. При нечетном количестве пакетов цели Nb центры радиолокационных ячеек по азимуту совпадают с центрами азимутальных интервалов пакетов. Однако при четном количестве пакетов цели радиолокационные ячейки центрируются на границах азимутальных интервалов пакетов. Это обстоятельство позволяет определить измеренный сигнал в радиолокационной ячейке как сумму Nb измерений энергии Nb пакетов, ближайших к радиолокационным ячейкам, расположенным в том элементе дискретизации по дальности и доплеру и в том луче по углу места, которые соответствуют дальности, доплеру и углу места радиолокационных ячеек. Таким образом можно получить сигнал, интегрированный по пакетам цели в радиолокационных ячейках.
При практическом применении метода ТПО для обзорных радиолокаторов прежде всего возникает проблема, заключающаяся в том, что каждая радиолокационная ячейка развертки может стать началом новой траектории, которая и будет обнаружена после обработки Ns разверток. В зависимости от параметров обзорного радиолокатора, таких как диапазон измеряемой дальности и пороговое значение дальности, а также числа пакетов в развертке, количество радиолокационных ячеек в развертке и тем самым возможное количество начальных точек может достигать величины порядка 109. Начинающаяся с радиолокационной ячейки четырехмерное пространство, в котором движется цель, может состоять из нескольких сотен радиолокационных ячеек в каждой развертке, количество которых увеличивается по экспоненте в периоде интегрирования с каждой следующей разверткой. Таким образом, наряду с проблемой точного определения количества возможных начальных точек в каждой развертке существует также проблема обнаружения сигнала цели в следующих развертках периода интегрирования.
При применении схемы ТПО в системах с электронно-оптическими датчиками, когда на входе получают двухмерные кадры данных с относительно высокой скоростью обновления, проблема обнаружения сигнала цели по многим кадрам может быть решена более простыми грубыми способами. При этом выполняют, начиная со всех пикселей в первом кадре периода интегрирования, простое интегрирование интенсивности пикселей в следующих кадрах для всех динамически возможных траекторий цели. Большая скорость обновления данных и сравнительно небольшое время интегрирования позволяют свести все динамически возможные движения цели к движениям с постоянной скоростью. В большинстве случаев небольшое максимальное количество пикселей, на которое цель может переместиться в течение периода интегрирования, и ограниченное количество дискретных скоростей позволяют получить одну сумму интенсивностей пикселей и еще больше сократить количество возможных траекторий. Примерами таких простых грубых способов, используемых в области радиолокации для обнаружения цели, являются преобразование Hough (см. Smith M.C., "Feature Space Transform for Multitarget Detection", материалы конференции Proc. IEEE Conf. On Decision and Control, Albuquerne, NM, декабрь 1980, cc. 835-836), скоростная фильтрация (см. Stocker A.D. и Jansen P., "Algorithms and Architectures for Implementing Large Velocity Filter Bank", материалы конференции Proc. SPIE Conf. On Signal and Data Processing of Small Targets, 1991, cc.140-155) и алгоритмы динамического программирования (см., например, Arnold J. и др., "Efficient Target Tracking Using Dynamic Programming", IEEE Trans. On Aerospace and Electronic Systems, т.29, №1, январь 1993, cc.44-56).
Как уже было отмечено выше, способ ТПО является достаточно грубым, поскольку при этом в расчет при интегрировании принимаются все возможные траектории цели. Для систем с электронно-оптическими датчиками, которые являются двухмерными средствами измерений и обладают высокой скоростью обновления информации, такой способ может оказаться достаточно эффективным и возможным для практического использования.
В литературе описаны случаи применения простых грубых методов обработки сигналов в радиолокационных системах (см., например, Urkowitz H. и Allen M.R., "Long Term Noncoherent Integration Across Resolvable Sea Clutter Areas", материалы конференции Proc. National Radar Conf., 1989, cc.67-71). При использовании таких методов для получения практически реализуемых требований по обработке сигналов проблему измерений необходимо свести к двум измерениям, рассматривая при этом только радиальные движения цели. Применение этих методов для определения траектории или в радиолокаторах для обнаружения нескольких целей и повышение по сравнению с обзорными радиолокаторами скорости обновления информации позволяет уменьшить рост возможных областей нахождения цели во время интегрирования. Кроме того, за счет использования на входе схемы ТПО не исходных данных измерения, а только тех точечных данных, которые превышают определенный предварительно заданный порог, в большинстве случаев существенно снижается объем обрабатываемых данных.
При использовании простых грубых методов в радиолокационных системах приходится работать с существенно большим количеством данных в каждой развертке и существенно большим во время интегрирования количеством возможных траекторий цели. Поэтому выполнение требований к интенсивности обработки сигналов грубыми методами в таких системах становится практически невозможным.
В основу настоящего изобретения была положена задача решить проблему, связанную со слишком высокими требованиями по интенсивности обработки. Эта задача решается согласно изобретению с помощью способа обнаружения цели с помощью радиолокатора с передающим устройством для генерирования пакета радиолокационных импульсов. В предлагаемом способе для каждой развертки k, которая содержит определенное число (Nb(k)) пакетов на первой стадии по определенному алгоритму обнаружения предварительно выбирают радиолокационную ячейку, на второй стадии инициализируют обработку методом "Траектория-Перед-Обнаружением" (ТПО) предварительно выбранных ячеек, используя траекторный фильтр для построения достоверной пороговой области для следующей развертки k+1, на третьей стадии данные в достоверной пороговой области развертки k+1 используют для корректировки метода ТПО и создания достоверной пороговой области для следующей развертки k+2 и третью стадию повторяют от развертки к развертке.
Основные преимущества настоящего изобретения заключаются в том, что оно не ухудшает точность обнаружения цели по сравнению с известным методом ТПО и может достаточно просто использоваться для улучшения характеристик обнаружения в системах с любыми средствами измерений, в которых ограничения на интенсивность обработки исключают возможность использования схемы ТПО, основанной на грубых простых методах обработки сигналов.
Другие особенности, преимущества и частные варианты осуществления настоящего изобретения более подробно рассмотрены ниже со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - теоретическая вероятность обнаружения при использовании метода ТПО для обзорного радиолокатора,
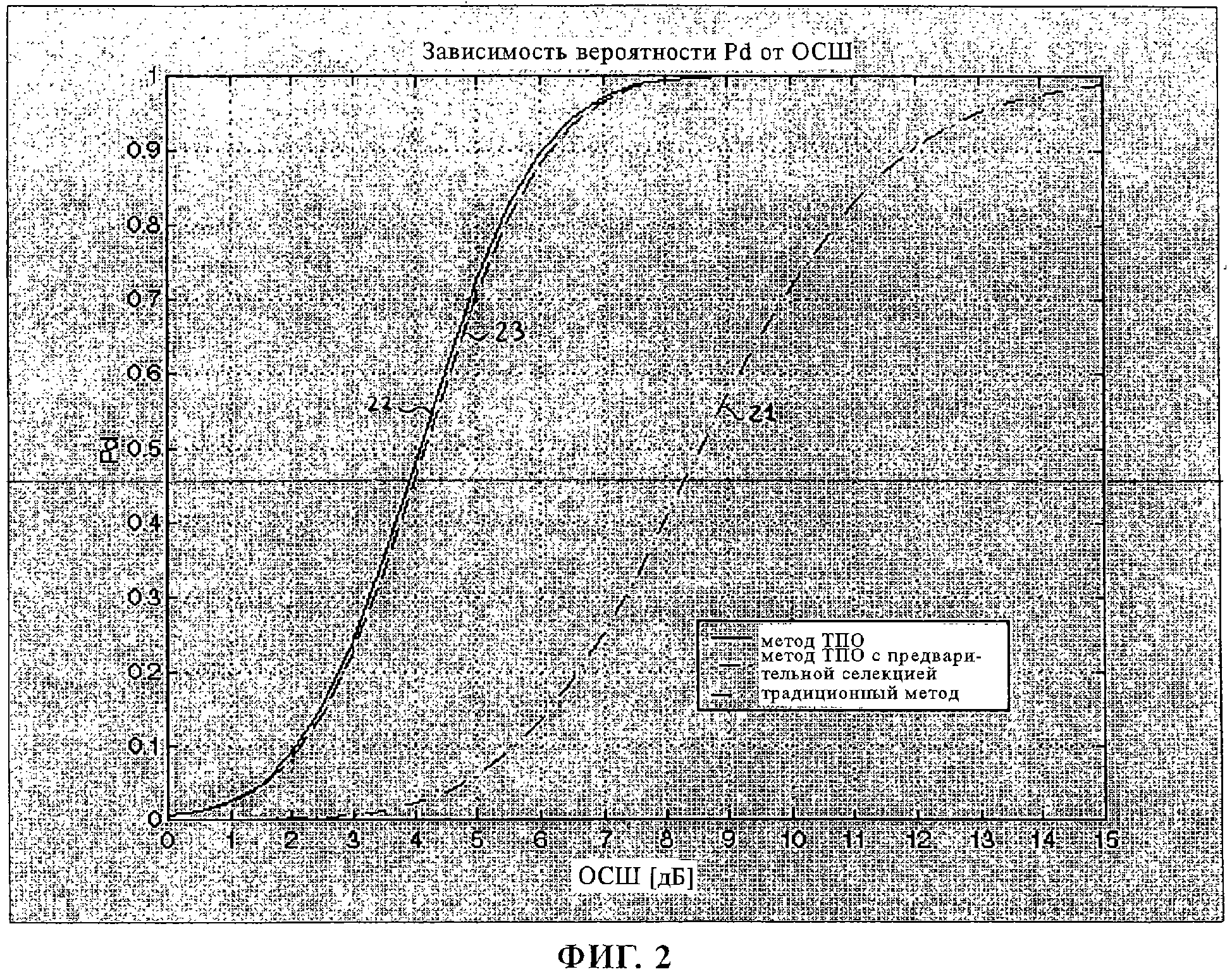
на фиг.2 - теоретическая вероятность обнаружения при использовании метода ТПО для обзорного радиолокатора с предварительной селекцией и без нее, а также вероятность обнаружения на уровне траектории при использовании известной схемы обнаружения;
на фиг.3 - блок-схема, иллюстрирующая основной вариант осуществления предлагаемого в изобретении способа с рекурсивной фильтрацией, основанного на методе ТПО, и
на фиг.4 - вероятность обнаружения цели предлагаемым в изобретении способом с обработкой данных по методу ТПО, известным способом и способом ОРФ-ТПО при их применении в импульсно-доплеровском обзорном радиолокаторе с формированием большого количества лучей по углу места.
При обнаружении цели предлагаемым в изобретении способом сначала выполняют стадию предварительной селекции. На стадии предварительной селекции только идентифицируют в развертке те радиолокационные ячейки, для которых имеет смысл инициировать процесс обработки данных методом ТПО. После предварительной селекции инициируется процесс обработки данных методом ТПО, и исходный радиолокационный видеосигнал обрабатывают в прямом и обратном направлении для ограниченного количества разверток. При этом в соответствии с методом ТПО, начиная с предварительной селекции, обрабатывают исходные данные измерений, а пороговую классификацию интегрированной интенсивности сигнала проводят только на уровне траектории.
На фиг.1 показана теоретическая вероятность обнаружения цели при использовании метода ТПО в обзорном радиолокаторе в зависимости от отношения сигнал/шум (ОСШ). Теоретическая вероятность Pd обнаружения цели методом ТПО для обзорного радиолокатора показана на графике в функции ОСШ для разного числа интегрированных разверток Ns={1,...,8}. Число Nb пакетов на каждую развертку в данном примере принято равным 4.
При построении графиков, показанных на фиг.1, в каждом случае использовали порог λt на уровне траектории, который соответствует вероятности ложной тревоги на уровне траектории, равной РtFA=10-10, и результаты, полученные на основании типичного критерия инициирования траектории двух графиков по двум разверткам с вероятностью ложной тревоги на уровне графика, равной 10-5.
Из приведенных на фиг.1 графиков следует, что увеличение вероятности обнаружения уменьшается с каждой новой добавленной в интервале интегрирования разверткой, и максимальное увеличение, как очевидно, получается от нескольких первых добавленных разверток. Следует отметить, что увеличение периода интегрирования также увеличивает время реакции системы, и поэтому число Ns разверток в интервале интегрирования в приведенных числовых примерах было ограничено четырьмя.
Предлагаемый в изобретении способ позволяет приблизиться к теоретическим характеристикам обнаружения при использовании метода ТПО. Предварительная селекция позволяет существенно сократить число рассматриваемых в каждой развертке радиолокационных ячеек при минимальном ухудшении характеристик системы. Для приближения к теоретическим характеристикам обнаружения цели обзорным радиолокатором методом ТПО рассматриваются статистики интегрированного сигнала цели, например функция плотности вероятности, являющаяся выходом идеального метода ТПО. Если интегрируется Ns разверток с Nb пакетами на каждую развертку, то интегральная сумма SumE, по которой выполняется пороговая классификация, равняется сумме NsNb независимых, распределенных по закону Рэлея измерений хi интенсивности:

Если, кроме того, величина xi нормализована по отношению к также распределенному по закону Ролея фоновому шуму, а линейное отношение сигнал/шум (ОСШ) обозначено через ρ, то функция плотности вероятности (pdf), обозначаемая как p1(x) для всех xi, равняется:

Если для оценки измеряемой интенсивности xi, соответствующей рассмотренным выше обнаружениям на уровне всплеска, использовать пороговое значение λh, то вероятность РhD обнаружения будет равна:

где Г является неполной гамма-функцией, определяемой как

Для сигналов, содержащих только шум, функция плотности вероятности pdf равна функции р0(х) и вероятность PhFA ложного обнаружения для порогового значения λh можно получить при подстановке значения ОСШ ρ=0 в уравнения (2) и (3), т.е. Р0(х)=ехр(-х), а PhFA=Г(λh,1).
В схеме ТПО интегральная сумма SumE, вычисляемая по формуле (1), используется для пороговой классификации, позволяющей обнаружить траекторию цели. Для расчета теоретических значений вероятности PtD обнаружения и вероятности PtFA ложного обнаружения в схеме ТПО при использовании порогового значения λt необходимо просто учесть, что в данном случае пороговое значение определяется не для одного сигнала, а для суммы NsNb распределенных в соответствии с уравнением (2) измерений интенсивности, т.е.:


В соответствии с предлагаемым в настоящем изобретении способом для решения проблемы, состоящей в том, что для каждой радиолокационной ячейки каждой развертки запускается требующий большого количества вычислений метод ТПО, используется схема предварительной селекции. В схеме предварительной селекции инициализируется алгоритм схемы ТПО, который рекурсивно обрабатывает Ns-1 разверток назад, а затем Ns-1 разверток вперед. По существу предварительная селекция приводит к Ns отдельным коррелированным периодам интегрирования: в первом периоде интегрирования развертка, с которой начинается предварительная селекция, является последней, а последний период интегрирования начинается с первой развертки. Точно так же и при обратном проходе, т.е. при обработке предыдущих разверток, необходимо иметь возможность допустимой потери обнаружения на уровне траектории, возникающей из-за предварительной селекции. Это обстоятельство требует, однако, чтобы радиолокационные видеосигналы последних Ns разверток были доступны для обработки, т.е. хранились в памяти. Для вычисления теоретической вероятности обнаружения методом ТПО с использованием предварительной селекции, в уравнения (4) и (5) необходимо ввести ограничение, заключающееся в том, что по крайней мере в одной из разверток интегральная сумма по Nb пакетам цели должна превышать порог λрпредварительной селекции:

и

На фиг.2 показан график зависимости теоретической вероятности Pd обнаружения цели методом ТПО от отношения сигнал/шум (ОСШ) с предварительной селекцией и без нее. Вероятность ложного обнаружения на уровне траектории РtFA принята в качестве примера равной 10-10, а число интегрируемых разверток Ns равняется 4. Для предварительной селекции выбран порог λр, соответствующий вероятности ложного обнаружения РpFA, равной в данном примере 2,5×10-4, при этом предварительная селекция приводит к сокращению количества расчетов по алгоритму метода ТПО, начинающихся на каждой развертке, на 99,975%. Кривой 21 показан график зависимости вероятности обнаружения для известной трехстадийной схемы обнаружения траектории по 4-м разверткам. В известной схеме обнаружения на уровне траектории используется бинарный критерий 3 из 4 разверток, на уровне графика используется бинарный критерий 3 из 4 пакетов, а на уровне всплеска используется пороговое значение λh, соответствующее вероятности РhFA ложного обнаружения, равной 4,2266×10-2. При этом вероятность ложного обнаружения на уровне траектории для известной схемы также равняется 10-10.
Приведенные на фиг.2 графики подтверждают значительные возможности улучшения характеристик обнаружения цели, которые дает использование вместо обычной схемы метода ТПО. Характеристика реального обнаружения цели методом ТПО представлена кривой 22. При использовании метода ТПО вероятность РtD обнаружения цели, равная 0,9, может быть получена при отношении сигнал/шум (ОСШ) на 6 дБ меньшем, чем при обнаружении цели обычным методом. Это означает, что использование схемы ТПО позволяет расширить границы порога обнаружения более чем на 40%. Кроме того, из показанных на фиг.2 графиков следует, что предлагаемая в изобретении схема предварительной селекции, влияние которой на систему иллюстрирует кривая 23, позволяет до минимума свести возможные потери в характеристиках обнаружения.
На следующей стадии предлагаемого в настоящем изобретении способа метод ТПО, инициализируемый предварительной селекцией, использует соответствующие радиолокационные ячейки дальности, доплера, азимута и угла места для инициализации рекурсивного траекторного фильтра. Для каждой развертки на основании предсказаний траекторного фильтра и предварительно измеренного ОСШ в достоверных пороговых областях радиолокационных ячеек в траекторном фильтре определяется присутствие цели и выбирается радиолокационная ячейка для обновления траекторного фильтра. Обновление траекторного фильтра позволяет при использовании метода ТПО до минимума снизить область поиска цели или пороговую область. Без обновления фильтра область, в которой может перемещаться цель, возрастает по экспоненте при каждом добавлении развертки во время интегрирования. В заключение интегрированный по выбранным радиолокационным ячейкам сигнал подвергают пороговой классификации.
Для определения упомянутых выше вероятностей обнаружения цели полученный сигнал следует интегрировать по многим разверткам. При выполнении рекурсивной фильтрации, основанной на методе ТПО, для этого требуется выполнить предсказание положения цели в следующей развертке с использованием положений цели в предыдущих развертках траекторного фильтра или только в положении цели, определенном графиком предварительной селекции. Можно выделить три следующих источника ошибок, которые затрудняют процесс предварительной селекции:
- ошибки измерения: ошибки, связанные с положением цели в прошлом и прошедшие через траекторный фильтр, и ошибки измерения, связанные с положением цели, обнаруженной в настоящий момент;
- маневры цели: в промежуток времени между двумя развертками и во время развертки цель может начать маневр. Поскольку время развертки составляет секунды, маневр цели может вызвать значительное отклонение в положении цели в развертке от заранее предсказанного;
- ложные ассоциации: мешающие отраженные сигналы, шумовые пики или помехи, а также сигналы от других целей на траектории приводят к отклонению траектории, полученной на выходе траекторного фильтра, от истинной траектории цели.
Обычно при наличии сразу многих неопределенностей, вызванных этими источниками ошибок рассматривают не только точку, с которой связывают положение цели, но и область вокруг нее - достоверную пороговую область. При формировании достоверной пороговой области ее прежде всего стремятся сделать такой, чтобы истинное положение цели почти наверняка находилось внутри этой области. С другой стороны, пороговую область стараются по возможности сделать настолько малой, чтобы ограничить количество графиков, которые следует рассматривать в качестве графиков, связанных с траекторией цели. Другая причина, по которой ограничивают размеры пороговой области, состоит в том, что далекий от предсказываемой точки график с большим правдоподобием может быть обусловлен наличием другой цели, мешающих отраженных сигналов или шума.
В то время как известные способы обнаружения цели используют пороговую область для выбора графика, который может быть соотнесен с траекторией цели, предлагаемый в настоящем изобретении способ использует ее в рекурсивной фильтрации, основанной на методах ТПО, для выбора разверток, которые следует рассматривать для дальнейшего соотнесения. При этом при истинной обработке данных методом ТПО выбираются не только те данные, которые используются для построения графика, но и все данные внутри пороговой области.
В другом методе пороговой классификации используют не интегрированную интенсивность сигнала, а интегрированное правдоподобие. В этом случае, например, интегрированную интенсивность сигнала вместе с позиционными данными используют для вычисления правдоподобия. Это правдоподобие наряду с правдоподобием других разверток используют для пороговой классификации на уровне траектории. Интегрированное по Ns разверткам правдоподобие, подвергающееся в дальнейшем пороговой классификации, позволяющей обнаружить траекторию цели, равняется произведению правдоподобий отдельных разверток. Траектория исключается из рассмотрения, если, например, интегрированное по Ns разверткам правдоподобие будет ниже порогового значения для определенного числа последовательных разверток.
Основные принципы метода ТПО, основанного на применении рекурсивной фильтрации, показаны в виде блок-схемы на фиг.3. Зная, как построить достоверную пороговую область, на шаге 31 из каждой развертки выбирают данные, подлежащие последующему объединению. На следующем шаге 32 выбранные из достоверной пороговой области данные, которые с наибольшим правдоподобием соответствуют траектории цели, фактически объединяют друг с другом. Сделать это можно, например, по расстоянию до предсказанной точки и наблюдаемой интенсивности сигнала, используя любую доступную информацию о маневрировании цели и интенсивности получаемого от нее сигнала. На вход в траекторный фильтр 30 поступают результаты объединения, полученные при выполнении шагов 31 и 32. На первом шаге 33 траекторный фильтр обновляет (корректирует) траекторные показатели объединенных данных. Понятие "траекторные показатели" определяется, в частности, для кинематических параметров траектории, таких как положение цели и ее скорость, и энергетических параметров, таких как ОСШ и интегральная сумма. На следующем шаге 34 по обновленным показателям траектории предсказываются траекторные показатели для следующей развертки. Предсказанные траекторные показатели, являющиеся результатом выполнения соответствующей процедуры на шаге 34, используются в качестве входных данных при выполнении предыдущих шагов 31, 32, 33.
Показанная на фиг.3 блок-схема иллюстрирует процесс поддержания траектории. При инициализации траектории согласно предлагаемому в настоящем изобретении способу выбираются обновленные траекторные показатели на основе показателей графика предварительной селекции. Показанный на фиг.3 процесс обработки сначала выполняется в обратном времени на предыдущих развертках, т.е. предсказание происходит назад, а не вперед. После обработки предыдущих разверток можно начать первый период интегрирования, необходимый для того, чтобы можно было начать процесс инициализации траектории. Далее обработка продолжается в прямом времени от развертки, полученной при предварительной селекции, и интегрированный по последующим периодам интегрирования сигнал подвергается пороговой классификации. Если ни один из первых Ns периодов интегрирования не привел к обнаружению цели, то процесс инициализации траектории прекращается. В ином случае начинается процесс поддержания траектории. Траектория исключается из рассмотрения в том случае, когда интегральная сумма будет ниже порога для определенного (выбираемого в качестве параметра) числа последовательных разверток. Как уже было отмечено выше, полученные на выходе траекторного фильтра предсказанные траекторные показатели используются при объединении данных для построения пороговой области и выбора данных, объединяемых внутри этой области.
Для отслеживания кинематических показателей можно использовать фильтр Калмана, который представляет собой рекурсивный фильтр, обеспечивающий возможность оценки характеристик погрешностей, лежащей в основе объединения данных, и который, кроме того, не требует выполнения большого объема вычислений. В настоящее время известны различные, основанные на использовании фильтра Калмана траекторные фильтры, которые разработаны для обработки множественных и/или слабых графиков и могут использоваться для построения возможных траекторных фильтров, работающих по схеме ТПО, как это описано, например, в работе Lerro D. и Bar-Shalom Y., "Automated Tracking with Target Amplitude Information", материалы конференции Proc. American Control Conference, San Diego, CA, 1990, cc.2875-2880, или в работе Zwaga J.H. и Driessen H., "An Efficient One-Scan-Back PDAF for Target Tracking in Clutter", материалы конференции Proc. SPIE Conf. On Signal and Data Processing of Small Targets, 2001, cc.393-404.
ОСШ цели можно определить достаточно просто с использованием, возможно взвешенного, среднего по последним разверткам значения. В зависимости от коэффициента относительной дальности цели в период осреднения изменение ОСШ при изменении дальности r можно корректировать в отношении 1/r4. При выборе длины периода усреднения необходимо соблюсти компромисс между усреднением флуктуаций поперечного сечения радара или эффективной площади отражения цели (ЭПОЦ) (моделируемой, например, распределением Рэлея) и возможностью отслеживать временные изменения ЭПОЦ, возникающие, например, из-за изменений углового положения цели. Усреднение флуктуаций ЭПОЦ требует большого периода усреднения, в то время как для отслеживания временных изменений ЭПОЦ необходим короткий период усреднения.
Считая оценку величины ОСШ цели или, что предпочтительней, ненормализованную амплитуду


где

Вероятность рs|n того, что измеренные амплитуды генерируются только одним шумом, определяется следующей формулой:

где 2σ2 представляет собой уровень фонового шума.
Таким образом, основанное на измеренной интенсивности сигнала отношение LS|T правдоподобия вычисляется по следующей формуле:

или после упрощения


где сумма членов

Зная предсказанный вектор состояния цели



где Н представляет собой матрицу наблюдений в стандартном обобщенном траекторном фильтре Калмана (см., например, Blackman S.S. и Popoli R., "Design and Analysis of Modern Tracking Systems", Norwood, MA, изд-во Artech House, 1999). Для радиолокационной ячейки в развертке k+1 с центром с соответствующими координатами дальности, азимута, угла места и доплера



где RBp, DBp, BIp и ЕВш обозначают размеры элементов дискретизации по параметрам дальности, доплера, азимута и ширины луча по углу места соответственно, a h обозначает стандартную (нелинейную) функцию преобразования пространства состояния в пространство измерений радиолокатора (см., например, ранее упомянутую работу Blackman S.S. и Popoli R.). В используемом в данном случае методе ТПО интеграл аппроксимируется Римановой суммой, при вычислении которой применительно к радиолокаторам достаточно брать для каждой размерности по две точки.
При нахождении траектории только по измерениям шума в достоверной пороговой области развертки k+1 нельзя выделить ни одну из NRC,k+1 радиолокационных ячеек. Поэтому все радиолокационные ячейки в этом случае будут иметь одинаковую вероятность рр|n, равную 1/NRC,k+1.
Таким образом, определенное по положению радиолокационной ячейки отношение LP|T правдоподобия равняется

где вероятность Pp|t определяется формулой (13).
Комбинируя отношение LS|T правдоподобия, найденное по измеренной интенсивности сигнала, с отношением LP|T правдоподобия, найденным по положению радиолокационной ячейки, можно вычислить отношение LSP|T правдоподобия того, что обусловленное целью измерение основано одновременно на измеренной интенсивности сигнала и положении в окне предсказания

где вероятность pp|t определяется формулой (13). В предлагаемом в изобретении способе именно это отношение правдоподобия заложено в основу объединения данных или выбора радиолокационной ячейки по методу ТПО с рекурсивной фильтрацией.
Основанный на рекурсивной фильтрации (ОРФ) метод ТПО может быть инициирован графиком



Кроме измеренного положения график предварительной селекции включает измеренные амплитуды


Выполняемая затем в обратном по времени порядке (назад) обработка предыдущих Ns-1 разверток методом ОРФ-ТПО аналогична описанной выше процедуре, выполняемой в прямом времени (вперед), за исключением того, что в этом случае вместо стандартной матрицы F изменения состояния на одну развертку вперед используется матрица F-1 изменения состояния на одну развертку назад. В результате обработки предыдущих разверток Ns-1 радиолокационных ячеек в предыдущих развертках, которые с наибольшим правдоподобием содержали информацию о наличии цели, рекурсивно связываются с траекторией с измеренными положениями zMLk, и измеренными амплитудами


Если интегральная сумма в первом периоде интегрирования окажется выше порога, то обнаружение траектории цели может быть объявлено уже в развертке k=0. Если порог не был превышен, а также при входе в процесс поддержания траектории, необходимо выполнить обработку вперед, начиная с развертки k=0. Однако перед запуском схемы ТПО вперед необходимо в соответствии со связанным измерением положения zMLk в предыдущих Ns-1 развертках обновить начальный вектор состояния s0|0 и соответствующую ковариацию погрешностей Р0|0. При выполнении этого рекурсивного обновления, начиная с измеренного в первой назад развертке положения zML-1, обновление в ns-ой назад развертке 20 измеренного положения




В этих уравнениях К обозначает коэффициент усиления фильтра Калмана, a F-nпредставляет собой матрицу изменения состояния на п разверток назад. При выполнении схемы ТПО назад и при обновлении результирующих измеренных положений динамика цели моделируется исходя из того, что цель не подвергается случайным возмущениям, т.е. шум равен нулю. Такие предположения используются в традиционных системах слежения, в которых для уменьшения числа ложных тревог прокладываются только прямолинейные траектории.
Приведенные выше уравнения в принципе выведены из уравнения стандартного обобщенного траекторного фильтра Калмана, при этом, однако, в качестве так называемого фактора сокращения информации (см. Li X.R. и Bar-Shalom Y., "Tracking in clutter with Nearest Neighbor Filter: Analysis and Performance", IEEE Trans. On Aerospace and Electronics Systems, том 32, №3, 10 июль 1996, сс.995-1009) можно также использовать вероятность





Описание той части метода ОРФ-ТПО обработки разверток, где обработка проводится вперед, можно начать с точки, в которой в развертке k найдена радиолокационная ячейка с максимальным отношением правдоподобия






в которых указывается только номер последней развертки, данные которой используют для оценки вектора состояния и ковариации погрешности, при этом первой разверткой, данные от которой используются всегда, является развертка k=-(Ns-1).
При вычислении средней амплитуды




Аналогично интегральная сумма вычисляется следующим образом:

Интегральная сумма

интенсивностью сигнала, используемой в пороговой классификации для обнаружения траектории цели в развертке k.
Предсказание кинематических и энергетических показателей траектории для развертки k+1 выполняется по следующим формулам:



в которых для моделирования случайной динамики цели используется ненулевая ковариация Q шума.
В соответствии с предлагаемым в настоящем изобретении способом в развертке k+1 для выбора радиолокационной ячейки в достоверной пороговой области сначала используют пороговый критерий




В качестве траекторного фильтра можно использовать и Particle-фильтр.
Такой Particle-фильтр описан, в частности, в работе Y. Boers и J.N. Driessen, "Particle Filter Based Detection For Tracking", материалы конференции Proc. of the American Control Conference, 25-27 июня 2001, Arlington, VA. При подаче на вход фильтра исходных данных в достоверной пороговой области фильтр вычисляет условную плотность вероятности состояния, определенного данными измерений. Вычисленную плотность вероятности используют для оценки состояния цели и правдоподобия наличия цели, которое в свою очередь используют для пороговой классификации на уровне траектории.
Основанная на методе ТПО рекурсивная фильтрация может быть реализована, например, в предназначенном для обнаружения многих целей импульсно-доплеровском радиолокаторе обнаружения со многими лучами по углу места. Предлагаемый в изобретении ТПО способ можно успешно использовать для обработки многих лучей по углу места.
В качестве примера ниже рассмотрен радиолокатор со следующими основными параметрами: время вращения составляет 5 с, азимутальный интервал BIp пакета равен 0,85°, ширина луча по азимуту равна 2,2°, ширина ЕВш луча по углу места равна 5,0°, разрешение RBp по дальности равно 80 м и разрешение DBp по доплеру составляет 12 м/с. При такой ширине луча радиолокатора по азимуту и азимутальном интервале пакета в пределах ширины луча радиолокатора по азимуту будет расположено приблизительно 2,6 азимутальных интервалов. Для перекрытия всего сектора по азимуту, соответствующему ширине луча радиолокатора по азимуту, независимо от взаимного расположения пакетов и цели, число Nb интегрированных пакетов в каждой развертке было выбрано равным 4.
Эффективная площадь отражения цели (ЭПОЦ) моделировалась как не зависящая от пакета случайная величина со средним значением 5 м2, распределенная как χ2 pdf с двумя степенями свободы. Начальное положение цели и скорость истребителя-бомбардировщика в районе радиолокатора были приняты равными следующим значениям:
дальность случайная: от 150 км до 500 км,
угол места равен центру луча по углу места (2,66°),
азимут: 0°,
радиальная скорость: 300 м/с плюс-минус случайное приращение в пределах половины разрешения DBp по доплеру,
тангенциальная скорость: 0 м/с.
Одновременно было принято, что цель не ускоряется, а движется в соответствии с начальными условиями по траектории с постоянной скоростью.
Для определения положения цели в качестве рекурсивного фильтра можно использовать траекторный фильтр, оценивающий трехмерное положение и скорость цели с кусочно-постоянной моделью ускорения типа белого шума (см., например, работу Blackman S.S. и Popoli R), принятой для описания динамики цели, в которой стандартное отклонение случайных ускорений принято равным 1 м/с2, что соответствует максимально допустимому ускорению 0,2g. Максимально допустимая скорость цели, принятая в расчет при инициализации траекторного фильтра, составляет 1000 м/с.
Один проход в данном примере состоит из четырех разверток, необходимых для определения вероятности обнаружения цели в Ns-1 развертках, обрабатываемых инициализацией вперед и назад по методу ОРФ-ТПО после предварительной селекции. Аналогично вычислению теоретической вероятности обнаружения цели вероятность обнаружения цели в данном случае выполняется за счет получения в каждой из 4 разверток прохода данных предварительной селекции, на основании которых запускается схема ОРФ-ТПО. Начальная дальность выбирается случайно и должна обеспечить определение вероятности обнаружения в диапазоне от 500 км, когда она при обработке методом ТПО практически равняется 0, до 150 км, когда она при обработке известным способом практически равняется 1. В малом масштабе случайный выбор начальной дальности приводит к большому разбросу потерь, поскольку дальность цели меняется относительно положения разрешения радиолокатора по дальности. По той же самой причине начальная радиальная скорость выбирается случайно в пределах разрешения радиолокатора по доплеру с центром, соответствующим номинальной скорости движения цели.
Для сравнения результатов, полученных известным способом обработки, с максимальными результатами, полученными методом ТПО, можно обработать одни и те же данные идеализированным известным способом и идеализированным способом ТПО. Идеализированный характер обработки этими способами заключается в том, что в известную схему и схему ТПО для каждой развертки вводят принимаемые в истинных пакетах от цели интенсивности сигнала, а также истинные значения дальности, доплера и (как очевидно) угла места. В каждом случае вероятность

На фиг.4 показаны графики зависимости вероятности обнаружения цели от дальности, полученные методом ОРФ-ТПО (кривая 41), идеализированным известным методом (кривая 42) и методом ТПО (кривая 43). Эти результаты были получены при обработке 28000 проходов, состоящих в среднем из 400 проходов на каждые 5 км разрешения радиолокатора по дальности. Вероятность обнаружения цели определяли для каждого разрешения по дальности в пределах 5 км.
Из приведенных на фиг.4 графиков следует, что метод ОРФ-ТПО действительно превосходит идеализированный метод ТПО. Связано это с возможностью получения методом ОРФ-ТПО соответствующей информации из пиков шумов в радиолокационных ячейках, соседних с радиолокационной ячейкой, в которой находится цель. Как отмечено, например, в работе Kirlin R.L. и Marama B.H., "The Effect of Noise-Only Tracks on the Performance of a Combined Detection and Tracking Algorithm", IEEE Trans. On Aerospace and Electronic Systems, том 33, №1, январь 1997, сс.329-333, при этом приходится учитывать определенные проблемы, связанные с тем, что в методе ТПО рассматривается несколько траекторий цели, из которых только одна приводит к ее обнаружению. Возможность решения этих проблем подтверждается методом ОРФ-ТПО, который существенно сокращает область поиска цели. Когда цель находится на границе двух радиолокационных ячеек, мощность сигнала примерно одинакова для обеих ячеек. Однако при воздействии шума эта ситуация меняется, и периодически в радиолокационной ячейке, соседней с той, в которой действительно находится цель, происходит возрастание амплитуды. Отсюда следует, что по крайней мере во время инициализации метод, основанный на рекурсивной фильтрации, т.е. сокращении области поиска до достоверной пороговой области траекторного фильтра и ассоциировании только той радиолокационной ячейки, в которой с наибольшей вероятностью находится цель, не ухудшает характеристик обнаружения цели.
При обнаружении цели известным способом в 90% случаев определения дальности цели вероятность обнаружения, равную 0,9, можно получить с усилением в 8,4 дБ, что превышает теоретическую вероятность обнаружения. Это обстоятельство можно объяснить, как и при теоретических расчетах, разной мощностью сигнала цели в разных пакетах. При сканировании цели лучом радиолокатора мощность сигнала цели будет соответствовать форме луча по азимуту. При обработке разверток методом ТПО интегрированная мощность сигнала соответствует среднему уровню сигнала, меньшему мощности сигнала в центре луча. В известном методе это приводит к тому, что из четырех пакетов на цель у двух внешних пакетов вероятность обнаружения цели на уровне всплеска будет намного меньше, чем у внутренних пакетов. Это обстоятельство оказывает намного более сильное (отрицательное) воздействие на вероятность обнаружения цели известным способом при использовании критерия обнаружения, при котором цель обнаруживается на графике в 3 из 4 случаев (и тем самым на вероятность обнаружения на уровне траектории), чем на вероятность обнаружения цели на уровне траектории методом ТПО при уменьшении средней мощности сигналов во всех приходящихся на цель пакетах.
Основанный на использовании рекурсивного фильтра метод ТПО можно применять в обзорных радиолокаторах. Именно с таким применением и связан рассмотренный выше метод ОРФ-ТПО, использующий, в частности, траекторный фильтр Калмана в качестве рекурсивного фильтра, который обновляет данные радиолокационной ячейки, в которой с наибольшей вероятностью в каждой развертке находится цель. Выше была также рассмотрена схема предварительной селекции, в которой обработка методом ТПО инициируется только для тех радиолокационных ячеек в развертке, в которых превышен порог предварительной селекции с обработкой методом ТПО в обратном времени ограниченного числа разверток. Теоретический анализ характеристик обнаружения свидетельствует о том, что использование предлагаемой схемы предварительной селекции для инициализации метода ТПО позволяет существенно сократить объем вычислений при существенно небольших потерях в точности обнаружения цели. Результаты проведенного моделирования показывают, что теоретические характеристики по методу ТПО могут быть получены при использовании предлагаемого в изобретении для инициализации процесса определения траектории цели метода ОРФ-ТПО.
В общем случае изобретение можно использовать для улучшения параметров обнаружения цели в измерительных системах, в которых ограничения на объем вычислений практически исключают возможность применения простых методов расчета по схеме ТПО. Отличительной особенностью изобретения является также простота его возможной практической реализации.
Выше изобретение было рассмотрено на примере обзорного радиолокатора, что, однако, не исключает возможность его использования в радиолокаторах любого типа, таких как радиолокаторы сопровождения или многофункциональные радиолокаторы.
Реферат
Заявлен способ обнаружения цели с помощью радиолокатора с передающим устройством для генерирования пакетов радиолокационных импульсов, при этом для каждой развертки k, включающей определенное число (Nb) пакетов, на первой стадии предварительно выбирают в достоверной пороговой области радиолокационную ячейку, на второй стадии инициализируют обработку методом "Траектория-Перед-Обнаружением" (ТПО) предварительно выбранных ячеек, используя траекторный фильтр для построения достоверной пороговой области для следующей развертки k+1, после чего обе эти стадии повторяют от развертки к развертке. Изобретение может найти применение в обзорном радиолокаторе, например в радиолокаторе с большим количеством лучей, формируемых по углу места, а также в более общем случае в радиолокаторах любого типа. 19 з.п. ф-лы, 4 ил.

Формула

Комментарии