Радиолокационный уровнемер - RU2561309C1
Код документа: RU2561309C1
Чертежи

Описание
Изобретение относится к контролю и измерению уровня сыпучих и жидких веществ в резервуарах и может быть использовано на химических, нефтедобывающих, нефтеперерабатывающих и других предприятиях, которые эксплуатируют резервуары, заполняемые жидкими и сыпучими веществами.
Известен бесконтактный радарный уровнемер, содержащий датчик уровня с использованием параболической антенны совместно с устройством позиционирования на основе шаровой опоры (патент США №7561113, НКИ 343/772, опубл. 14.07.2009 г.).
Датчик с параболической антенной и устройством позиционирования размещаются на крыше резервуара. Монтаж бесконтактного радарного уровнемера производится посредством крепления фланца шаровой опоры на ответном фланце патрубка резервуара с помощью болтов. При этом обеспечивается жесткое соединение фланца устройства позиционирования с фланцем патрубка. Изменение положения антенны внутри пространства резервуара производится поворотом шаровой опоры с последующей фиксацией ее положения с помощью фиксирующего фланца.
Такой механический способ изменения ориентации антенны в пространстве имеет недостатки при измерении уровня как жидких, так и сыпучих продуктов. Отсутствие возможности дистанционно управлять положением диаграммы направленности антенны в исследуемом объеме отрицательно сказывается на эксплуатационных характеристиках радиолокационного уровнемера в целом. Для измерения уровня жидких продуктов требуется взаимная перпендикулярность диаграммы направленности антенны и контролируемой поверхности. В этом случае точность ориентирования антенны должна повышаться при уменьшении ширины диаграммы направленности антенны. При достаточно малых значениях ширины диаграммы направленности может значительно снизиться уровень полезного сигнала по причине, связанной, например, с температурной деформацией крыши резервуара. Это может потребовать проведения повторной процедуры позиционирования антенны. Измерение уровня сыпучих веществ в отличие от жидких продуктов имеет свои особенности. Это связано с тем, что поверхность такого вещества не является гладкой и в отдельных случаях может представлять собой нерегулярную структуру, при этом отсутствует зеркальное отражение зондирующего сигнала от антенны, что приводит иногда к его частичной или полной потере. В этом случае изменение положения антенны может способствовать появлению полезного сигнала. Следует также отметить, что механический способ ориентирования антенны уровнемера при монтаже в условиях открытого пространства может заключать в себе определенные проблемы в случае, например, неблагоприятных погодных условий.
Перед авторами стояла задача создания радиолокационного уровнемера, надежно работающего при измерении уровня жидких и сыпучих продуктов в различного рода резервуарах, емкостях и при этом не требующего от обслуживающего персонала каких-либо действий, связанных с необходимостью корректировки положения антенны в процессе эксплуатации прибора.
Задача решена за счет того, что в радиолокационный уровнемер, содержащий датчик уровня с использованием микрополосковой антенны, преобразователь интерфейса и устройство управления, дополнительно введен блок управления диаграммой направленности микрополосковой антенны, сигнальный вход которого соединен с датчиком уровня, а сигнальный выход с микрополосковой антенной. При этом управляющий вход и информационный выход блока управления диаграммой направленности соединены с устройством управления.
Блок управления диаграммой направленности содержит фазовращатели и блок измерения углового положения микрополосковой антенны.
Фазовращатели расположены на внутренней стороне микрополосковой антенны.
Фазовращатели выполнены на основе микросхем, реализующих варакторный способ управления фазой сигнала.
Блок измерения углового положения микрополосковой антенны расположен на ее внутренней стороне.
Блок измерения углового положения микрополосковой антенны выполнен на основе твердотельного акселерометра.
Введение блока управления диаграммой направленности микрополосковой антенны позволяет оперативно, не используя механический способ, изменить положение луча внутри исследуемого объема в соответствии с заданным алгоритмом, что приведет к достижению технического результата в виде улучшения эксплуатационных характеристик уровнемера за счет повышения точности измерения уровня жидких и сыпучих веществ в резервуарах.
Заявляемый радиолокационный уровнемер обладает совокупностью существенных признаков, не известных из уровня техники для изделий подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемый радиолокационный уровнемер, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность предлагаемого радиолокационного уровнемера поясняется с помощью чертежей, где:
- на фиг. 1 представлена блок-схема;
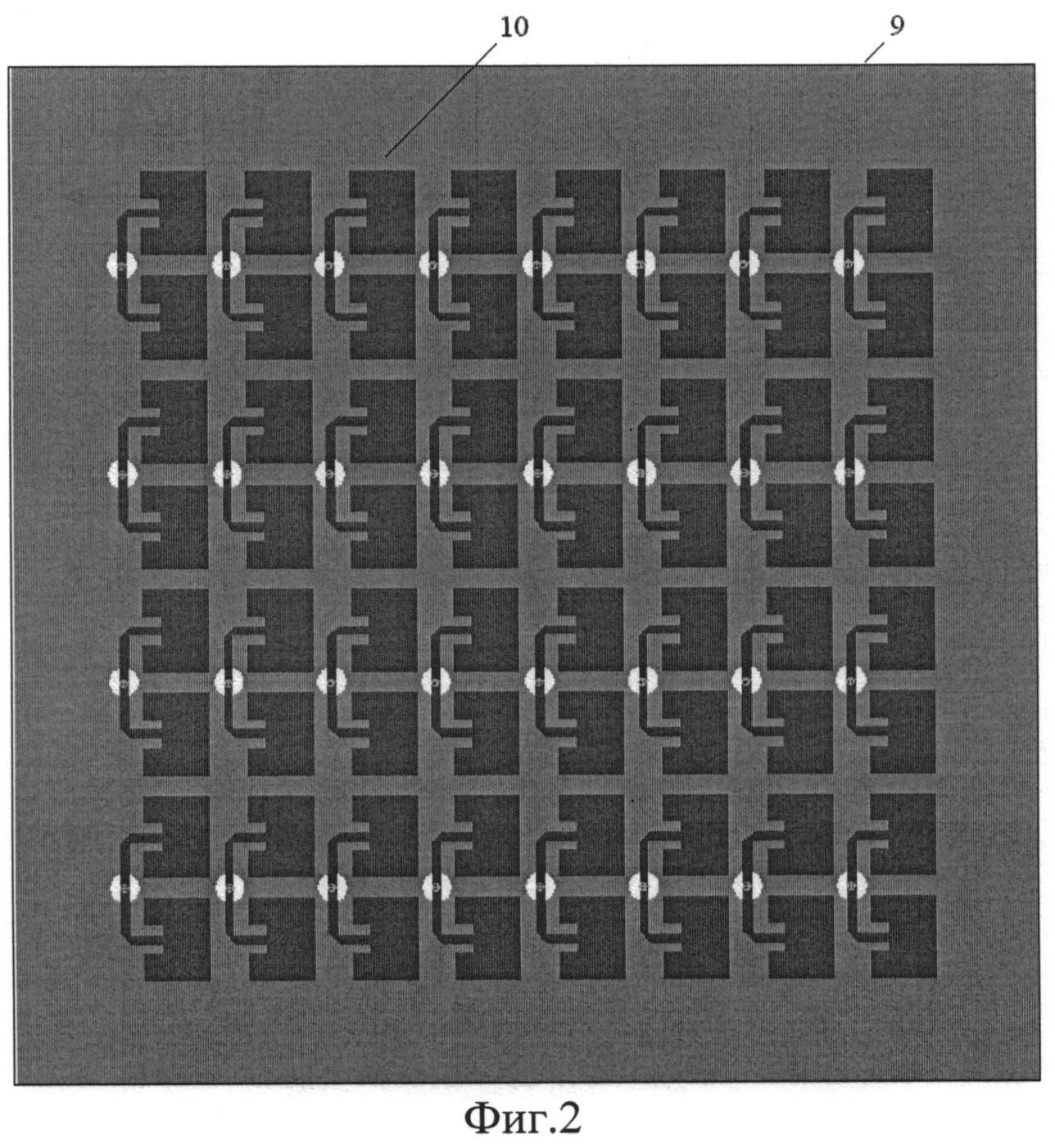
- на фиг. 2 - вид на микрополосковую антенну с внешней стороны;
- на фиг. 3 - вид на микрополосковую антенну с внутренней стороны;
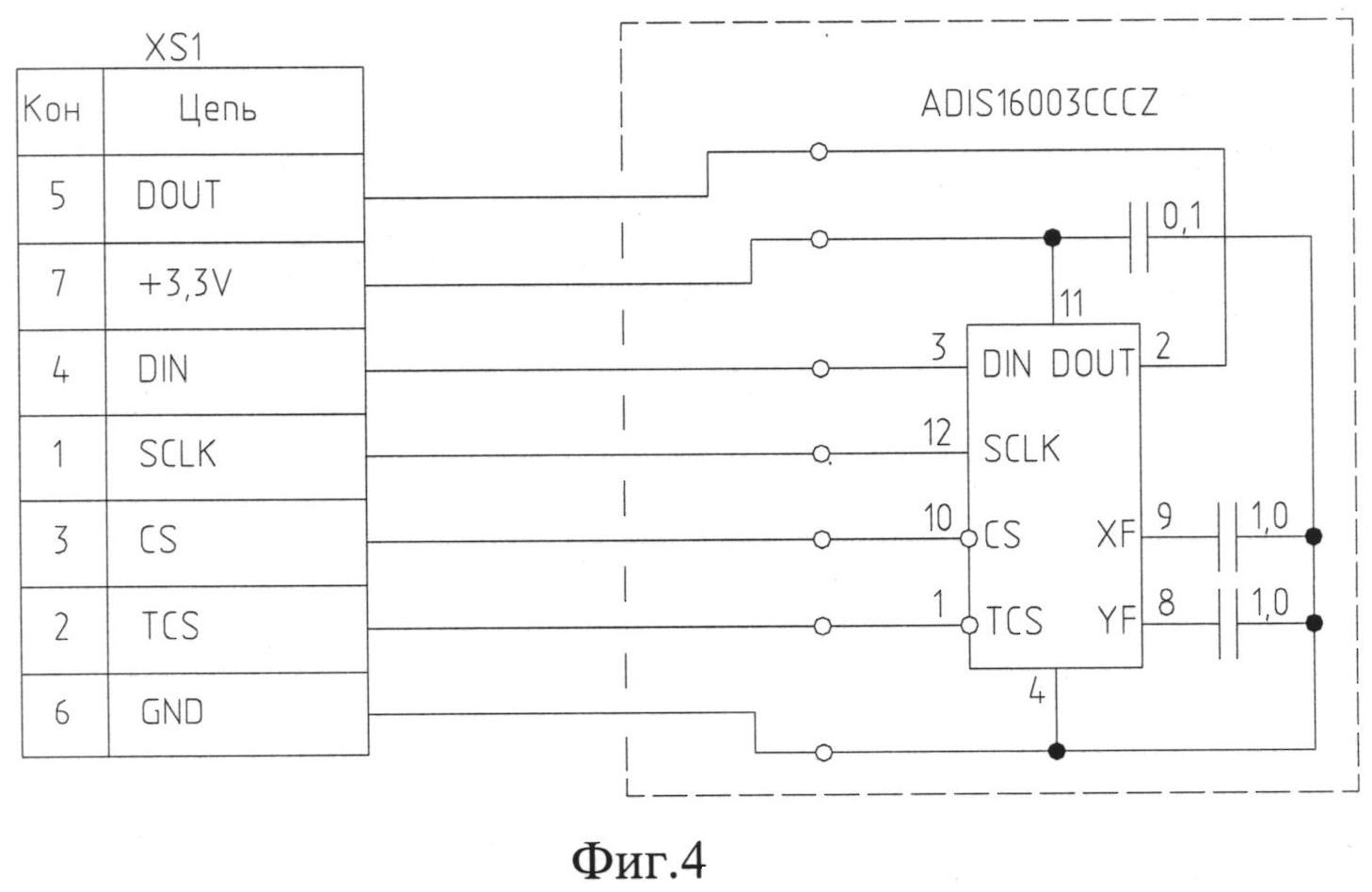
- на фиг. 4 - принципиальная электрическая схема блока измерения углового положения антенны.
Радиолокационный уровнемер содержит датчик 1 уровня, блок 2 управления диаграммой направленности микрополосковой антенны 3, преобразователь 4 интерфейса и устройство 5 управления. Блок 2 управления диаграммой направленности микрополосковой антенны 3 содержит четыре управляемых фазовращателя 6 и блок 7 измерения углового положения микрополосковой антенны 3.
Микрополосковая антенна 3 состоит из двух частей, внутренней 8 и внешней 9. Внутренняя часть 8 антенны 3 представляет собой печатную плату, выполненную из слоистого пластикового СВЧ материала. На этой части антенны 3 выполнена разводка питания групп излучателей 10 и расположен блок 2 управления диаграммой направленности микрополосковой антенны 3. Внешняя часть 9 антенны 3 также выполнена в виде печатной платы из СВЧ материала и содержит элементарные излучатели 10. Обе части соединены электрически и образуют единую конструкцию.
В качестве управляемых фазовращателей 6 применены микросхемы НМС 933LP4E производства фирмы Hittite microwave corporation. Микросхема содержит варакторы и цепи согласования.
Блок 7 измерения углового положения микрополосковой антенны 3 выполнен на основе микросхемы твердотельного акселерометра ADIS 16003 производства фирмы ANALOG DEVICES. Микросхема содержит два аналоговых датчика ускорения (по обеим координатам) и контроллер, преобразующий аналоговый сигнал этих датчиков в цифровой код, содержащий информацию об угле наклона.
Радиолокационный уровнемер работает следующим образом.
Датчик 1 уровня формирует зондирующий сигнал, который проходит через блок 2 управления диаграммой направленности и излучается микрополосковой антенной 3 в направлении объекта, расстояние до которого необходимо измерить. Отраженный от границы раздела сред сигнал возвращается обратным путем в датчик 1 уровня. Частота зондирующего сигнала изменяется во времени по пилообразному закону. В результате взаимодействия зондирующего и отраженного сигналов в датчике 1 уровня образуется целый ряд спектральных составляющих, частота которых несет информацию о дальности. После соответствующей обработки информация с датчика 1 уровня передается на преобразователь 4 интерфейса, после которого значение дальности в цифровом виде выдается для последующей обработки.
Изменение положения диаграммы направленности микрополосковой антенны 3 осуществляется посредством управления фазами зондирующего сигнала, возбуждаемого разными группами элементарных излучателей 10. Управление фазовращателями 6 осуществляется с помощью устройства 5 управления. Формирование сигнала управления производится на основе данных блока 7 о текущем угловом положении плоскости микрополосковой антенны 3 и требуемого угла наклона диаграммы направленности, поступающего от датчика 1 уровня.
Исходное положение диаграммы направленности микрополосковой антенны 3 определяется углом наклона плоскости ответного фланца резервуара. Перед началом эксплуатации радиолокационного уровнемера производится коррекция углового положения диаграммы направленности микрополосковой антенны 3 с тем, чтобы скомпенсировать отличное от требуемого положение измерительного луча.
Данная коррекция позволяет обеспечить взаимную перпендикулярность диаграммы направленности антенны 3 и контролируемой поверхности.
Алгоритм управления диаграммой направленности микрополосковой антенны 3 предполагает поиск оптимального угла наклона измерительного луча по критерию максимального уровня отраженного от исследуемой поверхности сигнала. Определение границ сканирования производится с учетом значения ширины диаграммы направленности на основе значений текущей дальности, геометрических параметров резервуара и текущего значения угла, поступающего с блока 7 измерения углового положения микрополосковой антенны 3.
С учетом этого появляется возможность оперативной, без участия человека, коррекции углового положения диаграммы направленности микрополосковой антенны 3 с целью компенсации изменения ее углового положения, возникшего вследствие различного рода причин, например, температурных расширений элементов конструкции резервуара или в случае полного отсутствия сигнала при работе с сыпучими продуктами.
На предприятии-заявителе разработана конструкторская документация радиолокационного уровнемера заявляемой конструкции, изготовлен его опытный образец, испытания которого подтвердили работоспособность и преимущества по сравнению с известными, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
Реферат
Изобретение относится к средствам контроля и измерения уровня жидких и сыпучих веществ в резервуарах и может быть использовано на химических, нефтедобывающих, нефтеперерабатывающих и других предприятиях, эксплуатирующих резервуары. Техническим результатом является улучшение эксплуатационных характеристик уровнемера за счет повышения точности измерения уровня продуктов в резервуарах. Радиолокационный уровнемер содержит датчик 1 уровня, блок 2 управления диаграммой направленности микрополосковой антенны 3, преобразователь 4 интерфейса и устройство 5 управления фазовращителями 6. Блок 2 установлен на внутренней стороне антенны 3 и содержит управляемые фазовращатели 6 и блок 7 измерения углового положения микрополосковой антенны. Изменение положения диаграммы направленности микрополосковой антенны 3 осуществляется посредством управления фазами зондирующего сигнала, возбуждаемого разными группами элементарных излучателей 10. Формирование сигнала управления производится на основе данных блока 7 и требуемого угла наклона диаграммы направленности, поступающего от датчика 1. Фазовращатели 6 выполнены на основе микросхем, реализующих варакторный способ управления фазой сигнала. Блок 7 выполнен на основе твердотельного акселерометра. 4 з.п. ф-лы, 4 ил.
Комментарии