Способ и система для уклонения воздушного движущегося объекта от перехватывающего летательного аппарата - RU2521073C2
Код документа: RU2521073C2
Чертежи








Описание
Настоящее изобретение относится к способу и системе для уклонения воздушного движущегося объекта от перехватывающего летательного аппарата, а также к воздушному движущемуся объекту, снабженному такой системой уклонения.
Более конкретно, настоящее изобретение хорошо приспособлено, хотя не исключительно, для автономного воздушного движущегося объекта, например, ракетного типа.
Известно, что имеются многочисленные средства защиты, в том числе ракетного, противоракетного типа, предназначенные для перехвата и уничтожения воздушных движущихся объектов во время полета их до того, как последние смогут выполнить свои задачи.
Задача настоящего изобретения заключается в обеспечении уклонения воздушного движущегося объекта от атакующего летящего летательного аппарата, угрожающего уничтожить его.
В связи с этим оно относится к способу уклонения воздушного движущегося объекта от летящего перехватывающего летательного аппарата, при этом указанный воздушный движущийся объект содержит средство автоматического пилотирования, а также излучающие и приемные антенны для электромагнитных сигналов, в котором автоматически выполняются следующие этапы, на которых:
- посредством, по меньшей мере, одной из указанных антенн излучают вперед от указанного воздушного движущегося объекта, по меньшей мере, один электромагнитный сигнал, частоту которого модулируют во времени;
- с помощью, по меньшей мере, одной из указанных антенн принимают, по меньшей мере, один отраженный электромагнитный сигнал, соответствующий отражению указанного излученного электромагнитного сигнала на указанный летящий летательный аппарат; и
- оценивают направление подхода указанного летательного аппарата относительно указанного воздушного движущегося объекта,
который отличается:
- тем, что указанный излученный электромагнитный сигнал представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется линейно как функция времени в соответствии с заданным законом модуляции, так что указанный отраженный электромагнитный сигнал также представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется в соответствии с тем же самым заданным законом модуляции; и
- тем, что дополнительно автоматически выполняются следующие этапы, на которых:
- из указанных излученного и отраженного электромагнитных сигналов формируют, по меньшей мере, один сигнал для анализа, частота которого соответствует отклонению частот между частотами указанных излученного и отраженного сигналов;
- спектральный анализ указанного сигнала для анализа выполняют для определения, по меньшей мере, одного значения указанного отклонения частот и для исключения эхо-сигнала от земной поверхности;
- из указанного определенного значения указанного отклонения частот вычисляют значение, по меньшей мере, одного параметра передвижения указанного перехватывающего летательного аппарата относительно указанного воздушного движущегося объекта; и
- на основании, по меньшей мере, определенного значения указанного параметра передвижения и направления подхода определяют команду на уклонение, предназначенную для указанного средства автоматического пилотирования, так что указанный воздушный движущийся объект автоматически выполняет маневр для уклонения от указанного летательного аппарата.
Таким образом, поскольку обнаружение летящего летательного аппарата использует электромагнитные волны, имеющие преимущество, не быть очень чувствительными к метеорологическим условиям, то благодаря этому изобретению воздушный движущийся объект может автоматически начать маневр для уклонения от такого летящего летательного аппарата, так что выполнить перехват последним не удается. Кроме того, помещение в импульсы позволяет чередовать периоды излучения с периодами молчания, в течение которых возможно анализировать отраженные сигналы без возмущения излученным сигналом.
Дополнительно, следует заметить, что предшествующий документ WO 2008/134815, описывающий способ, позволяющий предотвращать всякое столкновение беспилотного летательного аппарата с летательным аппаратом путем автоматической коррекции траектории, несомненно отличается от уже описанного способа настоящего изобретения.
Действительно, даже если оно раскрывает этапы излучения вперед электромагнитного сигнала, частота которого модулируется во времени, приема электромагнитного сигнала как отраженного летательным аппаратом, оценки направления подхода летательного аппарата к самолету и определения команды на уклонение от летательного аппарата из, в частности, направления подхода, можно заметить, что этот документ WO 2008/134815 совсем не предоставляет формирование сигнала для анализа, частота которого соответствует отклонению частот между частотами излученного и отраженного сигналов. Дополнительно, оно не позволяет выполнять какой-либо спектральный анализ сигнала для анализа, поскольку последний не формируется. Кроме того, этот документ не раскрывает какой-либо этап вычисления из отклонения частот, как определяется путем спектрального анализа, параметра движения (отделяющего расстояния, радиальной скорости) летательного аппарата относительно самолета.
Иначе говоря, документ WO 2008/134815 не может ставить под сомнение патентоспособность настоящего изобретения.
С другой стороны, согласно этому изобретению перед формированием сигнала для анализа предпочтительно осуществлять преобразование каждого из указанных излученного и отраженного сигналов в непрерывный синусоидальный сигнал, частота которого изменяется линейно как функция времени в соответствии с указанным законом модуляции.
Предпочтительно:
- в соответствии с указанным заданным законом модуляции частота изменяется как функция времени в соответствии с заданной крутизной модуляции в течение первого временного интервала излучения и в соответствии с противоположной указанной крутизне модуляции в течение второго временного интервала излучения; и
- указанное отклонение частот между частотами указанных излученного и отраженного сигналов изменяется с течением времени и определяется следующими соотношениями:
-
-

где
- a представляет указанную крутизну модуляции;
-

- c равно скорости света;
-

-

Преимущественно, чтобы указанный спектральный анализ представлял собой анализ с быстрым численным преобразованием Фурье.
Для оценки направления подхода указанного летательного аппарата относительно указанного воздушного движущегося объекта направление вектора Пойнтинга, связанного с указанным отраженным сигналом, предпочтительно определяется путем оценки первого угла, определенного между направлением указанного вектора Пойнтинга и продольной осью указанного воздушного движущегося объекта, и второго угла, определенного между проекцией указанного вектора Пойнтинга на плоскость, ортогональную продольной оси указанного воздушного движущегося объекта, пересекающей одну из указанных антенн, и осью координат, принадлежащей указанной ортогональной плоскости.
Кроме того, в конкретном варианте осуществления этого изобретения:
- указанный воздушный движущийся объект содержит четыре излучающие и приемные антенны; и
- указанные антенны равномерно распределены вокруг некоторого одного и того же поперечного сечения указанного воздушного движущегося объекта.
Предпочтительно, чтобы указанный воздушный движущийся объект предоставлялся, по меньшей мере, с одной антенной измерения высоты для измерения высоты указанного движущегося объекта над земной поверхностью, при этом выполняется только один из следующих этапов, на которых:
- определяют команду на уклонение, предназначенную для указанного средства автоматического пилотирования; и
- высоту указанного движущегося объекта над земной поверхностью измеряют с помощью указанной антенны измерения высоты.
Настоящее изобретение также относится к системе для уклонения воздушного движущегося объекта от летящего перехватывающего летательного аппарата, при этом указанный воздушный движущийся объект содержит средство автоматического пилотирования и излучающие и приемные антенны для электромагнитных сигналов. В соответствии с этим изобретением указанная система, встроенная на борту указанного воздушного движущегося объекта, содержит:
- указанные антенны, способные излучать вперед от указанного движущегося объекта электромагнитный сигнал, частота которого модулирована во времени, и принимать отраженный электромагнитный сигнал, соответствующий отражению указанного излученного сигнала от указанного летящего летального аппарата; и
- средство для оценки направления подхода указанного летательного аппарата относительно указанного воздушного движущегося объекта,
отличающаяся:
- тем, что указанный излученный электромагнитный сигнал представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется линейно как функция времени в соответствии с заданным законом модуляции, так что указанный отраженный электромагнитный сигнал также представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется в соответствии с тем же самым заданным законом модуляции; и
- тем, что указанная система содержит:
- средство для формирования из указанных излученного и отраженного электромагнитных сигналов сигнала для анализа, частота которого соответствует отклонению частот между частотами указанных излученного и отраженного сигналов;
- средство для выполнения спектрального анализа указанного сигнала для анализа с тем, чтобы определять, по меньшей мере, одно значение указанного отклонения частот и исключать эхо-сигнал от земной поверхности;
- средство для вычисления из определенного значения указанного отклонения частот значения, по меньшей мере, одного параметра передвижения указанного перехватывающего летательного аппарата относительно указанного воздушного движущегося объекта; и
- средство для определения из, по меньшей мере, определенного значения указанного параметра передвижения и направления подхода указанного летательного аппарата команды на уклонение, предназначенной для указанного средства автоматического пилотирования, так что указанный воздушный движущийся объект автоматически выполняет маневр для уклонения от указанного летательного аппарата.
Предпочтительно, в соответствии с этим изобретением
- система содержит четыре излучающие и приемные антенны; и
- указанные антенны равномерно распределены вокруг некоторого одного и того же поперечного сечения указанного воздушного движущегося объекта.
В варианте осуществления этого изобретения указанный движущийся объект содержит, по меньшей мере, одну антенну измерения высоты для измерения высоты указанного движущегося объекта над земной поверхностью, при этом указанная система содержит указанную антенну измерения высоты и выполняет только одно из следующих действий:
- определение команды на уклонение, предназначенной для указанного средства автоматического пилотирования, посредством указанных антенн;
- измерение высоты указанного движущегося объекта над земной поверхностью посредством указанной антенны измерения высоты и, по меньшей мере, некоторых из средств, используемых для определения указанной команды на уклонение.
Таким образом, в системе уклонения могут поочередно осуществляться обнаружение угрозы и радиоизмерение высоты. Тем самым достигается выигрыш в массе и объеме.
Предпочтительно, чтобы система уклонения содержала, по меньшей мере, один переключатель, способный переключать излучение и прием электромагнитного сигнала между, по меньшей мере, одной из указанных антенн и указанной антенны измерения высоты.
Настоящее изобретение также относится к воздушному движущемуся объекту, содержащему систему уклонения, как описано ранее.
Фигуры прилагаемых чертежей лучше объяснят, каким образом это изобретение может быть выполнено. На этих фигурах одинаковыми позициями обозначены идентичные элементы.
Фиг.1 и 2 показывают функциональные схемы системы для уклонения воздушного движущегося объекта от перехватывающего летательного аппарата согласно первому и второму варианту осуществления, согласно этому изобретению.
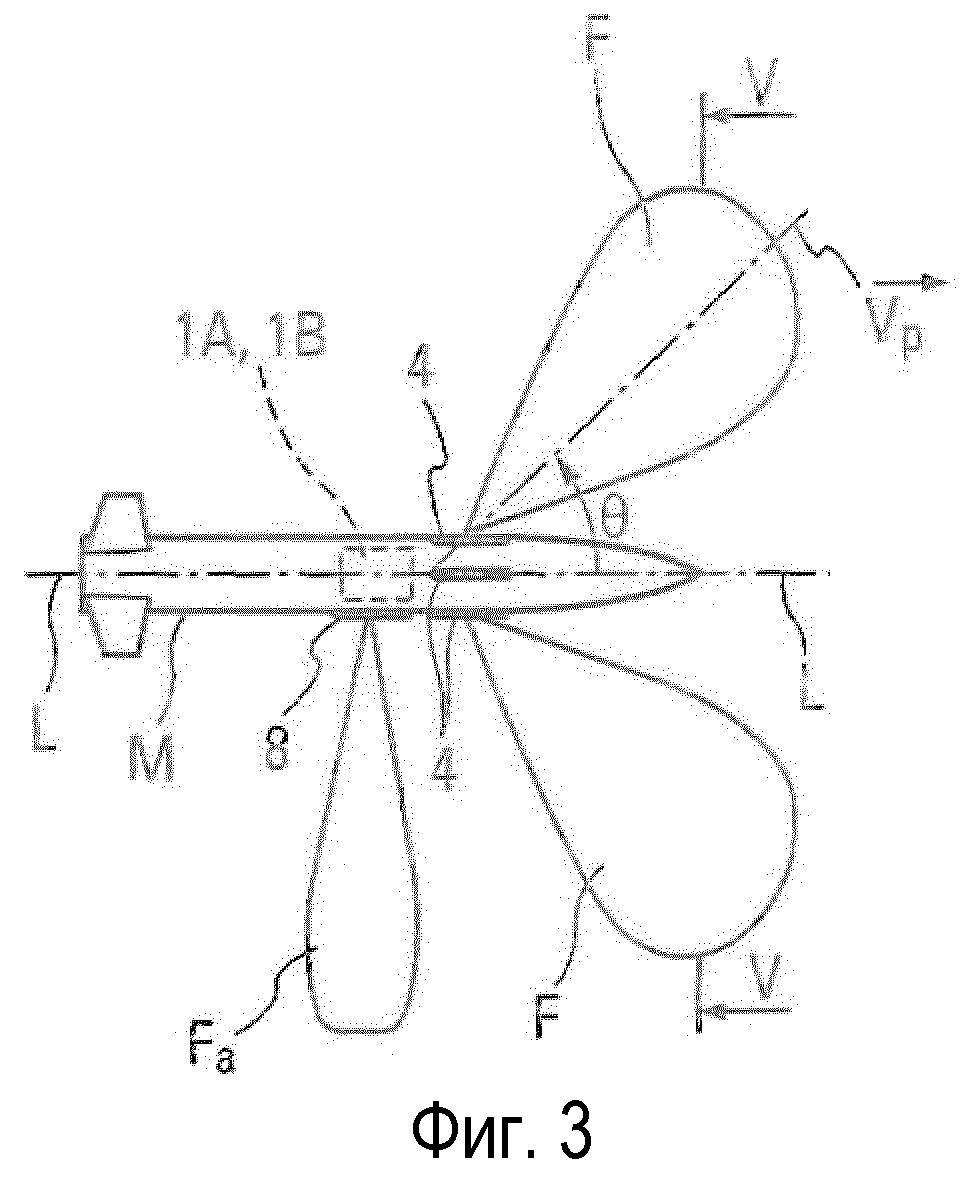
Фиг.3 показывает в виде схематичных сечений волновые пучки четырех излучающих и приемных антенн и одной антенны измерения высоты, установленных на борту воздушного движущегося объекта, согласно изобретению. На фиг.3 показаны стационарные пучки излучения каждой из излучающих и приемных антенн.
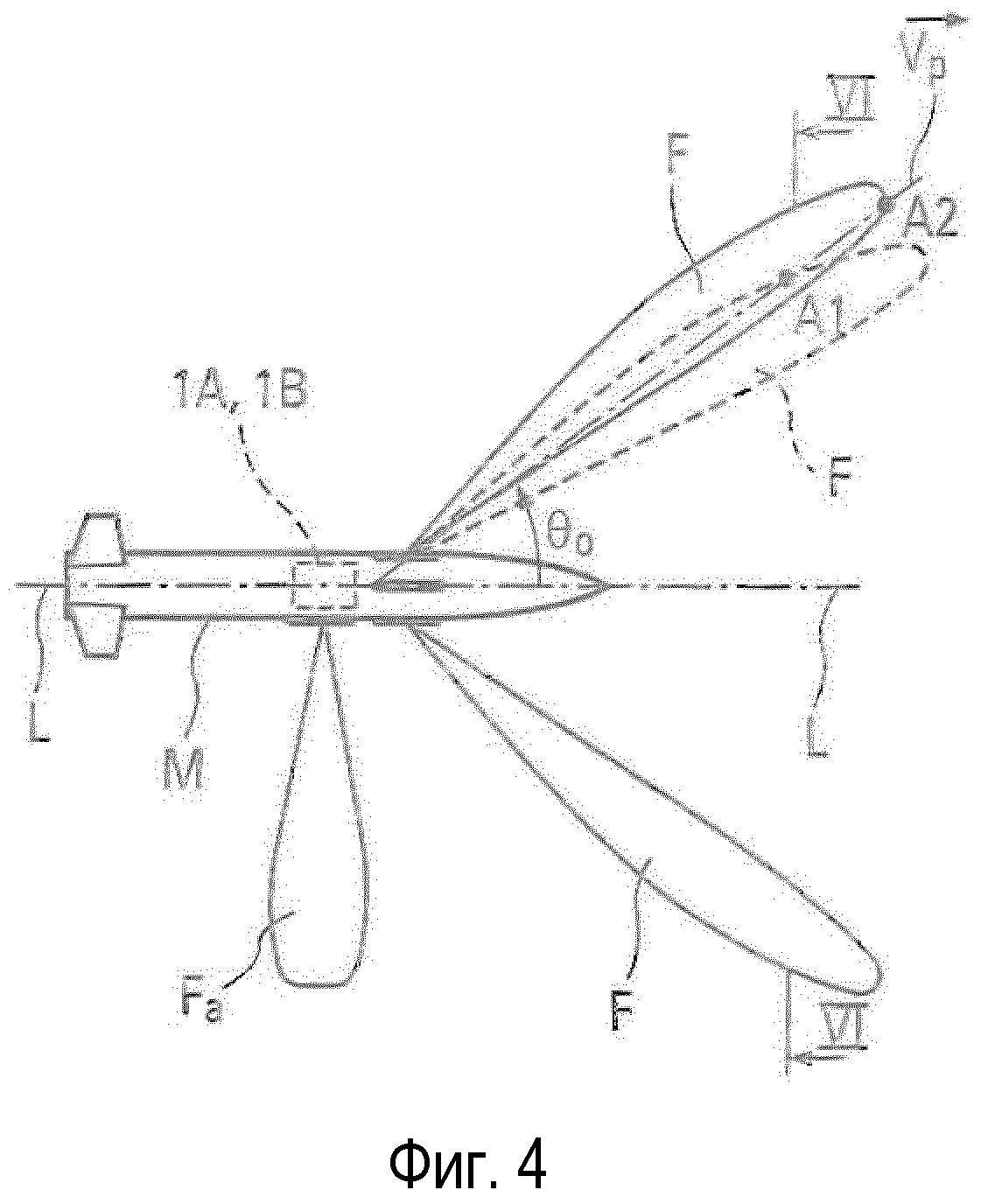
Фиг.4 является фигурой, идентичной фиг.3, но теперь излучающие и приемные антенны представляют собой антенны с электронным сканированием.
На фиг.5 представлен схематичный разрез воздушного движущегося объекта из фиг.3 по линии V-V.
На фиг.6 представлен схематичный разрез воздушного движущегося объекта из фиг.4 по линии VI-VI.
На фиг.7 представлена диаграмма, иллюстрирующая временное изменение импульсного сигнала, излученного системой уклонения этого изобретения, совместно с импульсным сигналом, принимаемым в качестве отклика после отражения излученного сигнала от перехватывающего летательного аппарата.
Фиг.8 показывает излученные и отраженные импульсные сигналы из фиг.7 после того, как они были преобразованы в непрерывные сигналы в системе уклонения этого изобретения.
Фиг.9 иллюстрирует закон частотной модуляции, применяемый к импульсному сигналу, излученному системой уклонения, в течение периода излучения.
Фиг.10 показывает изменение частоты излученного сигнала и соответствующего отраженного сигнала как функцию времени, когда радиальная скорость перехватывающего летательного аппарата относительно воздушного движущего объекта является нулевой, а расстояние, отделяющее летательный аппарат от движущегося объекта, не является нулевым.
Фиг.11 подобна фиг.10, при этом расстояние, отделяющее перехватывающий летательный аппарат от движущегося объекта является нулевым, а относительная радиальная скорость отличается от нулевой.
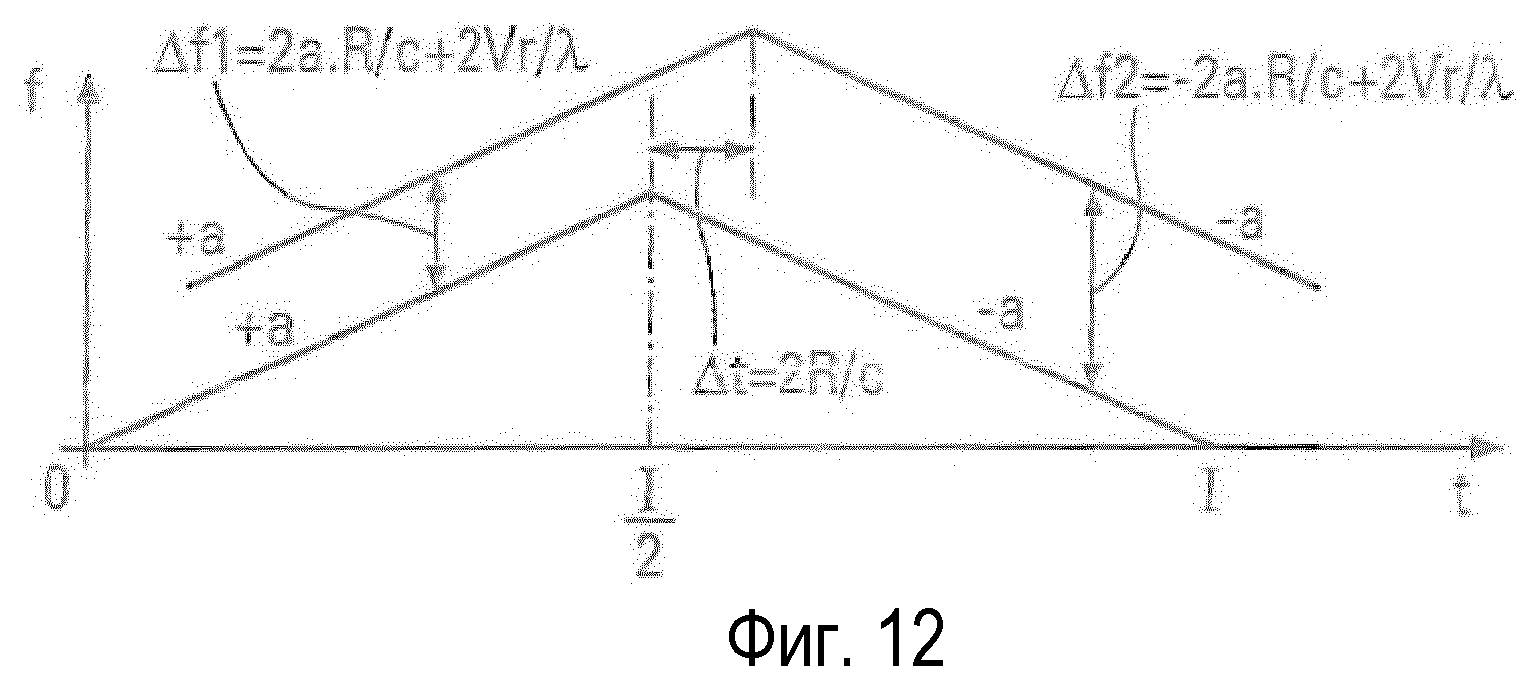
Фиг.12, подобная фиг.10 и 11, показывает временное изменение частоты излученного сигнала и соответствующего отраженного сигнала, принимаемого системой изобретения, когда радиальная скорость перехватывающего летательного аппарата относительно воздушного движущегося объекта и расстояние, разделяющее их, не равны нулю.
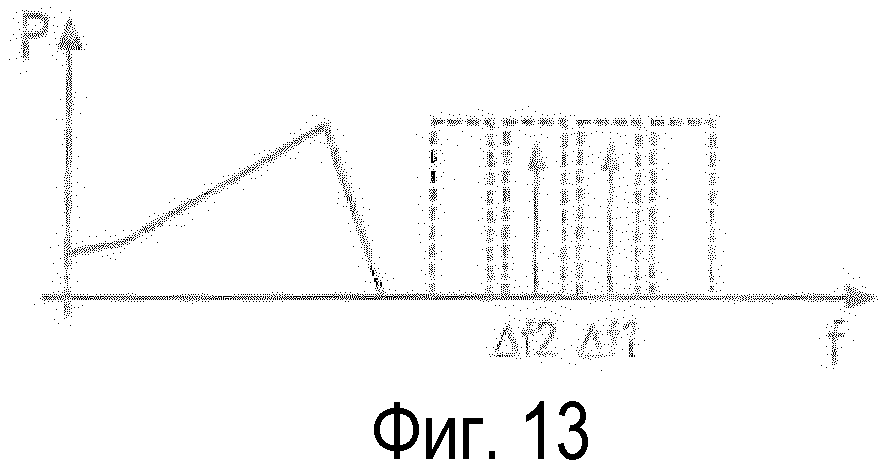
Фиг.13 показывает спектральный анализ через преобразование Фурье отраженного сигнала из фиг.12, выполняемый системой уклонения этого изобретения.
Система 1А, 1В согласно этому изобретению, показанная в виду функциональной схемы на фиг.1 и 2, предназначена для уклонения от того, что атакующий летящий летательный аппарат, в том числе ракетного типа, перехватывает автономный движущийся объект М, например, ракетного типа. С этой целью система 1А, 1В уклонения вырабатывает команду на уклонение, передаваемую на средство 2 автоматического пилотирования (например, силовой привод, управляющий поверхностью 3 управления), установленное на подвижном объекте М, так что последний выполняет маневр для уклонения.
Как показано на фиг.1-6, система 1А, 1В уклонения содержит четыре излучающие и приемные антенны (далее называемые антеннами 4 обнаружения), равномерно распределенные по окружности в одном и том же поперечном сечении движущегося объекта М. Четыре антенны 4 могут излучать электромагнитные сигналы в виде пучков электромагнитных волн F, ориентированных вперед от указанного движущегося объекта М, которые могут быть стационарными (фиг.3) или которые могут сканировать определенный угловой участок пространства (в таком случае антенну называют антенной с электронным сканированием) (фиг.4). Кроме того, они могут принимать такие электромагнитные сигналы.
Следовательно, для каждой одной из антенн 4 обнаружения направление излучения или приема электромагнитного сигнала обычно определяется направлением соответствующего вектора Пойнтинга. Он задается парой углов (θ, ϕ). Угол θ сформирован между направлением вектора Vp Пойнтинга сигнала и продольной осью L-L воздушного движущегося объекта М. Что касается угла ϕ, то он определен как угол между проекцией Pvp вектора Vp Пойнтинга на плоскость Pt, ортогональную к оси L-L, проходящей через рассматриваемую антенну 4, и осью Y-Y отсчета, принадлежащей ортогональной плоскости Pt.
Фиг.5 и 6 показывают коэффициент 5 усиления в режиме излучения каждой одной из антенн 4. В случае антенн 4 обнаружения с электронным сканированием (фиг.6) концентрические кольца 6 соответствуют коэффициентам 5 усиления антенн 4 обнаружения согласно различным ориентациям соответствующих пучков относительно оси L-L.
Независимо от вида антенны 4 имеются области перекрытия 7 коэффициентов 5 усиления в режиме излучения.
Система 1А, 1В уклонения также содержит антенну 8 измерения высоты, предназначенную для измерения высоты движущегося объекта М над земной поверхностью. Она излучает пучок электромагнитных волн Fa, ориентированный к земной поверхности (фиг.3 и 4).
Ниже даются следующие необходимые пояснения:
- «излученный» сигнал 9: электромагнитный сигнал, излученный одной из антенн 4 обнаружения; и
- «отраженный» сигнал 10: электромагнитный сигнал, излученный одной из антенн 4 обнаружения, который отражается перехватывающим летательным аппаратом и принимается одной или несколькими приемными антеннами 4. Следует заметить, что отраженный сигнал 10 содержит полезную часть, соответствующую сигналу, фактически отраженному летательным аппаратом, и интерференционную часть, соответствующую отражению сигнала излученного на земную поверхность (также называемую эхо-сигналом от земной поверхности). Эхо-сигнал от земной поверхности возмущает обнаружение полезной части отраженного сигнала 10. Поэтому в последующем описании предполагается, что отраженный сигнал 10 содержит полезную часть, на которую наложен эхо-сигнал от земной поверхности.
В соответствии с этим изобретением система 1А, 1В уклонения содержит:
- по меньшей мере один передатчик 11, например, сверхвысокочастотного типа, сформированный для генерации электромагнитного сигнала 9, предназначенного для излучения, по меньшей мере, одной из четырех антенн 4 обнаружения;
- средство 12 для обработки соответствующего отраженного сигнала 10, принятого, по меньшей мере, одной антенной 4 обнаружения; и
- средство 13 для определения команды на уклонение, предназначенной для средства 2 автоматического пилотирования движущегося объекта М.
Как показано на фиг.7 (по оси ординат показана амплитуда А сигнала), считается, что:
- каждый электромагнитный сигнал 9, излученный антенной 4 обнаружения, представляет собой синусоиду, помещенную в импульсы, частота Fe которой изменяется линейно как функция времени в соответствии с заданным законом модуляции. Помещение в импульсы позволяет чередовать периоды излучения и периоды молчания, в течение которых можно анализировать соответствующие отраженные сигналы 10, используя средство 12, без возмущения излученным сигналом 9; и
- перехватывающий летательный аппарат имеет радиальную скорость Vr относительно движущегося объекта М и отделен от последнего расстоянием R.
Закон частотной модуляции каждого излученного сигнала 9 определяют, например, следующим образом (фиг.9):
- частоту Fe излученного сигнала 9 изменяют линейно как функцию времени в соответствии с крутизной модуляции, равной +a (при этом a является постоянной), в течение первого временного интервала излучения [0; I/2] (например, равного половине периода I излучения рассматриваемого излученного сигнала 9); и
- частоту Fe изменяют линейно как функцию времени в соответствии с обратным знаком этой крутизны +a модуляции (то есть в соответствии с крутизной -a модуляции) в течение второго временного интервала излучения [I/2; I].
С другой стороны, сигнал 10, как отраженный перехватывающим летательным аппаратом, претерпевает следующие изменения относительно соответствующего излученного сигнала 9:
- задержку



- второй сдвиг частоты


Таким образом, когда перехватывающий летательный аппарат имеет дистанцию


-

-
В объеме этого изобретения, как показано на фиг.1 и 2, средство 12 обработки для отраженного сигнала 10, принимаемого, по меньшей мере, одной антенной 4 обнаружения, содержит:
- средство 14 для усиления принимаемого отраженного сигнала 10;
- средство 15 для преобразования каждого одного из излученного 9 и отраженного 10 импульсных сигналов в непрерывный сигнал С1, С2, остающийся модулированным в соответствии с тем же самым упомянутым выше законом частотной модуляции (фиг.8). Такое средство 15 соединено со средством 14 усиления и с передатчиком 11 посредством соединений L1 и L2, соответственно;
- аналоговый смеситель 16 обычного типа, принимающий от средства 15 непрерывный излученный сигнал С1 и непрерывный отраженный сигнал С2 через соединения L3 и L4. Смеситель 16 может объединять друг с другом такие сигналы С1 и С2, так что на его выход выводится аналоговый сигнал для анализа, частота которого соответствует отклонению частот между частотой непрерывного излученного сигнала С1 и частотой непрерывного отраженного сигнала С2;
- аналого-цифровой преобразователь 17, преобразующий аналоговый сигнал для анализа от смесителя 16 (соединение L5) в цифровой сигнал для анализа;
- средство 18 для выполнения спектрального анализа через быстрое цифровое преобразование Фурье цифрового сигнала для анализа, принятого от преобразователя 17 через соединение L6. Спектральный анализ сигнала для анализа позволяет выделять полезную часть отраженного сигнала и исключать эхо-сигнал от земной поверхности, включая случай, когда перехватывающий летательный аппарат имеет достаточно высокую скорость относительно земной поверхности и когда он перемещается к движущемуся объекту М. Кроме того, такой спектральный анализ дополнительно позволяет определять спектральные линии, соответствующие


- выделение спектральных линий
- оценка частот
Оценка частоты
- средство 19 для вычисления дистанции


-
-
на выход средства 19 вычисления могут выводиться значения дистанции


В дополнение к этому система 1А, 1В уклонения этого изобретения также содержит средство 20 для оценки направления подхода перехватывающего летательного аппарата относительно указанного движущегося объекта М в то время, когда производится оценка направления вектора Vp Пойнтинга, связанного с отраженным сигналом 10 (соответствующее определению пары углов (θ0 и ϕ0) из фиг.4 и 6).
Таким образом, оценку угла θ0, которую можно предположить только для антенн 4 обнаружения с электронным сканированием, обычно получают путем сравнения двух значений А1 и А2 коэффициентов усилений, получаемых путем двух соседних проверок пучков волн F одной и той же антенны 4 обнаружения (фиг.4).
Точно также угол ϕ0 направления подхода оценивают путем сравнения двух значений А3 и А4 коэффициентов усиления, получаемых соответственно по двум антеннам 4 обнаружения, имеющим граничащие пучки волн F (фиг.6). В противоположность оценке θ0 угол ϕ0 можно определять независимо от типа антенны 4 обнаружения (со стационарным пучком или при наличии электронного сканирования).
Кроме того, в объеме настоящего изобретения система 1А, 1В уклонения содержит средство 13 для определения команды на уклонение на основании значений R, Vr, θ0 и ϕ0, принимаемых через соединения L8 и L9 со средства 19 вычисления и со средства 20 определения для направления подхода перехватывающего летательного аппарата. На выход средства 13 (соединение L10) может выводиться команда на уклонение, подаваемая на средство 2 автоматического пилотирования движущегося объекта М. Как только такая команда на уклонение принимается, средство 2 автоматического пилотирования может автоматически выполнять соответствующий маневр для уклонения, чтобы предотвращать разрушение движущегося объекта М перехватывающим летательным аппаратом.
В дальнейшем считается, что передатчик 11, средство 12 обработки и средство 20 определения направления подхода образуют цепь излучения-приема системы 1А, 1В уклонения.
В первом варианте осуществления настоящего изобретения, показанном на фиг.1, система 1А уклонения содержит единственную цепь излучения-приема, распределяемую посредством переключателя 21 между четырьмя антеннами 4 обнаружения и антенной 8 измерения высоты. Переключатель 21 содержит вход (цепь излучения-приема), сформированный соединением L11, и пять выходов (четырех антенн 4 обнаружения и антенны 8 измерения высоты), сформированных соединениями L12 и L13.
Переключатель 21 позволяет подключать к одной цепи излучения-приема четыре антенны 4 поочередно или антенну 8.
Во втором варианте осуществления настоящего изобретения, показанном на фиг.2, система 1В уклонения содержит три цепи излучения-приема, соединенных соответственно с тремя антеннами 4 обнаружения (соединение L14), и одна цепь излучения-приема, распределяемая между четвертой антенной 4 обнаружения и антенной 8 измерения высоты посредством переключателя 21. Последний содержит вход (распределяемой цепи излучения-приема), сформированный соединением L11, и два выхода (четвертой антенны 4 и антенны 8 измерения высоты), сформированные соединениями L15 и L16.
В этом втором режиме подача сигналов на не распределяемые цепи осуществляется непосредственно с трех соответствующих антенн 4 обнаружения.
В объеме настоящего изобретения система 1А, 1В уклонения, при любом ее осуществлении, в дополнение к функции уклонения обладает функцией измерения высоты радиотехническим способом (то есть может определять высоту движущегося объекта М относительно земной поверхности с помощью антенны 8 измерения высоты). Функция обнаружения угрозы и функция измерения высоты радиотехническим способом исключают друг друга, так что система 1А, 1В работает или в режиме обнаружения угрозы, или в режиме радиовысотомера.
Таким образом, как выше описывалось, радиоизмерения высоты осуществляются в распределяемой цепи излучения-приема.
Реферат
Изобретение относится к радиолокации. Технический результат заключается в обеспечении уклонения воздушного движущегося объекта от атакующего летящего летательного аппарата, угрожающего уничтожить его. Согласно изобретению система (1А) уклонения содержит средство (13) для определения из, по меньшей мере, значения параметра перемещения (R, Vr) перехватывающего летательного аппарата относительно упомянутого движущегося объекта и из направления (θ, ϕ) подхода указанного летательного аппарата относительно указанного движущегося объекта команды на уклонение, предназначенной для средства автоматического пилотирования указанного движущегося объекта, так что последний автоматически выполняет маневр для уклонения от указанного летательного аппарата. 3 н. и 7 з.п. ф-лы, 13 ил.
Формула
в котором автоматически выполняются следующие этапы, на которых:
- посредством, по меньшей мере, одной из указанных антенн (4) излучают вперед от воздушного движущегося объекта (M), по меньшей мере, один электромагнитный сигнал (9), частоту которого модулируют во времени;
- с помощью, по меньшей мере, одной из указанных антенн (4) принимают, по меньшей мере, один отраженный электромагнитный сигнал (10), соответствующий отражению указанного электромагнитного сигнала (9) излученного на указанный перехватывающий летательный аппарат;
- из указанных излученного и отраженного электромагнитных сигналов (9, 10) формируют, по меньшей мере, один сигнал для анализа, частота которого соответствует отклонению частот (Δf1, Δf2) между частотами указанных излученного (9) и отраженного (10) сигналов;
- спектральный анализ указанного сигнала для анализа выполняют для определения, по меньшей мере, одного значения указанного отклонения (Δf1, Δf2) частот и для исключения эхо-сигнала от земной поверхности;
- из указанного определенного значения указанного отклонения определенных частот (Δf1, Δf2) вычисляют значение, по меньшей мере, одного параметра (R, Vr) передвижения для указанного перехватывающего летательного аппарата относительно указанного воздушного движущегося объекта (M); и
- оценивают направление (θ0, ϕ0) подхода указанного летательного аппарата относительно указанного воздушного движущегося объекта (M),
отличающийся тем, что указанный излученный электромагнитный сигнал (9) представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется линейно как функция времени в соответствии с заданным законом модуляции, так что указанный отраженный электромагнитный сигнал (10) также представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется в соответствии с тем же самым заданным законом модуляции; и
тем, что выполняют исключительно один из следующих этапов, на которых:
- из, по меньшей мере, определенного значения указанного параметра (R, Vr) передвижения и направления (θ0, ϕ0) подхода указанного летательного аппарата определяют команду на уклонение, предоставленную для указанного средства (2) автоматического пилотирования, так что указанный воздушный движущийся объект (M) автоматически выполняет маневр уклонения от указанного летательного аппарата, и
- измеряют высоту указанного воздушного движущегося объекта (M) над земной поверхностью посредством указанного высотомера, включающего в себя по меньшей мере одну антенну (8) измерения высоты.
- в соответствии с указанным заданным законом модуляции частота изменяется как функция времени в соответствии с заданной крутизной (+a) модуляции в течение первого временного интервала излучения и в соответствии с противоположной указанной крутизной модуляции (-a) в течение второго временного интервала излучения; и
- указанное отклонение (Δf1, Δf2) частот между частотами указанных излученного (9) и отраженного (10) сигналов изменяется с течением времени и определяется следующими соотношениями:
-

-
где
- а представляет указанную крутизну модуляции;
- R соответствует расстоянию, отделяющему указанный воздушный движущийся объект от указанного летательного аппарата;
- c равно скорости света;
- Vr представляет относительную радиальную скорость указанного летательного аппарата относительно указанного движущегося объекта; и
- λ соответствует длине волны указанного излученного сигнала.
- указанный воздушный движущийся объект (M) содержит четыре излучающие и приемные антенны (4); и
- указанные антенны (4) равномерно распределены вокруг одного и того же поперечного сечения указанного воздушного движущегося объекта (M).
- указанные антенны (4), способные излучать вперед от указанного движущегося объекта (M) электромагнитный сигнал (9), частота которого модулирована во времени, и принимать отраженный электромагнитный сигнал (10), соответствующий отражению указанного излученного электромагнитного сигнала (9) на указанный летательный аппарат;
- средство (17) для формирования на основании указанных излученного (9) и отраженного (10) электромагнитных сигналов сигнала для анализа, частота которого соответствует отклонению (Δf1, Δf2) частот между частотами указанных излученного (9) и отраженного (10) сигналов;
- средство (18) для выполнения спектрального анализа указанного сигнала для анализа с тем, чтобы определять, по меньшей мере, одно значение указанного отклонения (Δf1, Δf2) частот и исключать эхо-сигнал от земной поверхности;
- средство (19) для вычисления из определенного значения указанного отклонения частот значения, по меньшей мере, одного параметра (R, Vr) передвижения указанного перехватывающего летательного аппарата относительно указанного воздушного движущегося объекта (M); и
- средство (20) для оценки направления (θ0, ϕ0) подхода указанного летательного аппарата относительно указанного воздушного движущегося объекта (M),
отличающаяся тем, что:
- упомянутый высотомер включает в себя по меньшей мере одну антенну (8) измерения высоты;
- указанный излученный электромагнитный сигнал (9) представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется линейно как функция времени в соответствии с заданным законом модуляции, так что указанный отраженный электромагнитный сигнал (10) также представляет собой синусоидальный сигнал, помещенный в импульсы, частота которого изменяется в соответствии с тем же самым заданным законом модуляции;
тем, что указанная система содержит:
- средство (13) для определения из, по меньшей мере, определенного значения указанного параметра (R, Vr) передвижения и направления (θ0, ϕ0) подхода указанного летательного аппарата команды на уклонение, предназначенной для указанного средства (2) автоматического пилотирования, так что указанный воздушный движущийся объект (M) автоматически выполняет маневр для уклонения от указанного летательного аппарата, и
- антенну (8) измерения высоты;
и тем, что упомянутая система выполняет исключительно одно из следующих действий:
- определение команды на уклонение, предназначенной для указанного средства (2) автоматического пилотирования, посредством указанных антенн (4);
- измерение высоты указанного воздушного движущегося объекта (M) над земной поверхностью посредством указанной антенны (8) измерения высоты и, по меньшей мере, некоторых из средств, используемых для определения указанной команды на уклонение.
в которой:
- она содержит четыре излучающие и приемные антенны (4); и
- указанные антенны (4) равномерно распределены вокруг одного и того же поперечного сечения указанного воздушного движущегося объекта (M).
Комментарии