Радиолокационная станция кругового обзора "резонанс" - RU2624736C2
Код документа: RU2624736C2
Чертежи







Описание
Область техники
Предлагаемое изобретение относится к обзорным радиолокационным станциям (РЛС), конкретно к РЛС кругового обзора со стационарными антеннами и может быть использовано как РЛС двойного назначения для обнаружения и распознавания воздушных объектов (ВО) в системах контроля за воздушным пространством МО РФ и управления воздушным движением (УВД).
Уровень техники
Известны обзорные радиолокационные станции панорамного типа /1/, в которых используется равномерно вращающаяся антенна, совершающая круговое движение относительно вертикальной оси и облучающая в каждый данный момент узкую зону пространства в виде двугранного угла с вертикально расположенным ребром, то есть узкую зону по азимуту вокруг антенны. Это позволяет определить азимут обнаруженных летательных аппаратов, причем определяется также и радиальная дальность до этих летательных аппаратов, что в совокупности позволяет определить горизонтальное положение данного летательного аппарата. При этом изображения летательных аппаратов визуализируются на круглом экране индикатора типа телевизионного экрана в виде светящихся точек, местоположение которых соответствует горизонтальному положению летательных аппаратов.
Известны также радиолокационные станции обзора /2/ воздушного пространства, в которых для анализа пространства по углу места дополнительно используется мозаичная антенна с множеством фазосдвигающих устройств, в которых мгновенно и по произвольному закону управляют сдвигом фазы для того, чтобы мгновенно изменять направление излучения.
Недостатком двух этих типов радиолокационных станций с механически движущимися антеннами является повышенные энергетические затраты на вращение антенн и непроизводительное расходование энергии излучения, посылаемой в не являющихся важными и не требующими контроля угловых направлениях.
Кроме того, такие радиолокационные станции (РЛС) весьма дороги в эксплуатации, что ограничивает их применение лишь на наиболее крупных аэропортах.
Указанные недостатки устранены в обзорных РЛС /3, 4/ со стационарной антенной кругового обзора и электронным сканированием воздушного пространства узким лучом в азимутальной и угломестной плоскости.
Известные РЛС кругового обзора /3, 4/ со стационарной антенной, содержат решетку излучающих и приемных элементов с электронным сканированием пространства, выстроенных вертикальными колонками на антенных опорах, рассредоточенных равномерно по кольцу или по сторонам правильного многоугольника (треугольника, квадрата и т.д.).
Частота функционирования радиолокационной антенны РЛС /3/ находится в Х-диапазоне электромагнитных волн (ЭМВ) с изменениями в диапазоне ±75 МГц относительно выбранной центральной частоты.
Ее обзорная антенна содержит решетку антенных элементов (приемопередающих вибраторов), установленных на верхней стороне антенной опоры башенного типа и выстроенных на ней вертикальными колонками по сторонам правильного треугольника.
При этом вибраторы антенн через фазовращатели соединены с высокочастотными циркуляторами, входы которых соединены с выходом широкополосного генератора зондирующих импульсов, а выходы - с многоканальным радиоприемником с цифровым выходом. Управляющие входы фазовращателей, а также сигнальные выходы многоканального радиоприемника, соединены с соответствующими выходами и входами цифрового устройства обработки принятых сигналов и управления сканированием пространства игольчатым лучом в азимутальной плоскости в диапазоне углов 0…360° и в угломестной плоскости 0…-45° относительно горизонтальной плоскости на высоте опорной башни. Диаграмма направленности по углу места представляет собой лепесток типа обратного квадратного косеканса, то есть касательный к горизонтальной плоскости, что позволяет обеспечить выявление летательных аппаратов в воздухе и на земле.
Управляющие входы и информационные выходы цифрового устройства обработки принятых сигналов и управления сканированием пространства соединены с автоматизированным рабочим местом (АРМ) оператора станции.
Первым недостатком известной обзорной РЛС /3/ со стационарной антенной электронного кругового обзора воздушного пространства является пониженная дальность обнаружения малозаметных ВО, изготовленных с применением Stealth-технологии и радиопоглощающих покрытий для снижения их отражающей способности.
Вторым недостатком известной обзорной РЛС /3/, снижающим дальность обнаружения ВО, является увеличенное поглощение и рассеивание электромагнитных волн (ЭМВ) в используемом X-диапазоне ЭМВ.
Третьим недостатком известной обзорной РЛС /3/ является пониженная производительность обзора пространства из-за дуплексного (на прием или на передачу) режима работы вибраторов ее антенной системы.
Четвертым недостатком известной обзорной РЛС /3/ является пониженная надежность, связанная с наличием огромного количества циркуляторов и фазовращателей ограниченной надежности, используемых в ее обзорной антенне.
Указанные недостатки обзорной РЛС /3/ со стационарной антенной электронного кругового обзора затрудняют раннее обнаружение и распознавание гражданских и военных ВО для своевременного принятия соответствующих управленческих решений УВД.
Известны методы и средства /4…9/ раннего обнаружения и распознавания гражданских и военных объектов на основе эффекта резонанса.
Эффект резонанса (фиг. 1) заключается в увеличении отражающей способности ВО, когда его геометрические размеры «L» соизмеримы с длиной «λ» радиоволны зондирующего сигнала (ЗС). При соответствующем (λ=2L) подборе несущей частоты ЗС РЛС можно существенно /4…9/ увеличить эффективную отражающую поверхность ВО, а по частоте резонанса и амплитудно-частотному спектру отраженного ЗС судить о размерах и типе обнаруженного ВО.
Согласно /9/ сущность резонансного обнаружения малозаметных ВО состоит в последовательном выполнении следующих операций:
1. Последовательно формируют пачки радиоимпульсов длительностью τи с периодом повторения Ти, причем количество радиоимпульсов в каждой пачке равно N (для использования быстрого преобразования Фурье число выбирают равным 2S, где S=8, 9, 10), несущую частоту радиоимпульсов первой пачки устанавливают равной 150 МГц (λ=2 м), а несущую частоту каждой последующей очередной пачки увеличивают на Δf=10 МГц, перестройку несущей частоты радиоимпульсов ведут до достижения ею величины 6 ГГц (λk=5 см).
2. Усиливают сформированные радиоимпульсы по мощности и последовательно излучают их в пространство с помощью антенной системы РЛС.
3. Последовательно принимают с помощью антенной системы РЛС отраженные сигналы, переводят их в цифровую форму с помощью аналого-цифрового преобразователя и записывают в оперативное запоминающее устройство (ОЗУ) амплитуды принятых отраженных сигналов каждого периода повторения, причем период дискретизации аналого-цифрового преобразования выбирают в 10-30 раз меньшим длительности зондирующего сигнала τи.
4. Разделяют всю совокупность записанных в ОЗУ оцифрованных отраженных сигналов в пределах каждого периода повторения на последовательные, соединяющиеся границами, но непересекающиеся и равные по длительности стробы дальности, нумеруют стробы дальности в пределах каждого периода повторения от 1 до М, причем длительность стробов выбирают равной длительности зондирующего радиоимпульса τи.
5. Детектируют все записанные отраженные сигналы с помощью цифрового фазового детектора для получения квадратурных составляющих отраженных сигналов, т.е. переводят принятые оцифрованные отраженные сигналы в комплексную форму.
6. В пределах каждого m-го строба дальности проводят согласованную обработку оцифрованных принятых сигналов путем свертки с оцифрованным комплексно-сопряженным зондирующим радиоимпульсом этого же периода повторения.
7. Определяют пик отклика отражений в каждом стробе дальности по критерию максимума его амплитуды и записывают в комплексном виде значения пиков откликов каждого m-го периода повторения каждой k-й пачки радиоимпульсов в ОЗУ.
8. Формируют для каждой k-й из К пачек радиоимпульсов цифровые массивы пиков откликов отражений одинаковых по номеру m стробов дальности и получают для каждой k-й пачки радиоимпульсов М массивов с N элементами в каждом массиве.
9. Проводят с элементами каждого массива пиков откликов операцию преобразования Фурье (быстрого преобразования Фурье) и получают в результате для каждого массива соответствующий спектральный массив, в котором формируется спектральный отклик ВО при реальном нахождении ВО в соответствующем стробе дальности (если в m-м стробе дальности находился ВО, то в соответствующем m-м спектральном массиве возникает его спектральная составляющая - спектральный отклик).
10. Сравнивают спектральные отклики отраженных сигналов в каждом спектральном массиве с заранее установленным пороговым значением (уровнем) и в случае превышения порога фиксируют в ОЗУ частоту соответствующего спектрального отклика m-го массива k-й пачки радиоимпульсов, которую принимают за доплеровскую частоту соответствующего ВО, и одновременно принимают решение об обнаружении на соответствующей дальности ВО.
11. В случае превышения порога спектральным откликом m-го массива по результатам анализа отражений всех пачек радиоимпульсов считают обнаруженный ВО обычным типовым ВО с ЭПР порядка единиц квадратных метров, а в случае превышения порога только на одной из частот зондирования (только в спектральном массиве одной отдельной пачки радиоимпульсов) изменяют дальнейший режим излучения на режим излучения аналогичных пачек с единой несущей резонансной частотой fp, равной несущей частоте пачки, по отражениям которой получено разовое (не повторяющееся для других пачек) превышение спектральным откликом порогового значения.
12. В строгом соответствии с описанными выше операциями формируют и анализируют спектральные массивы отражений для пачек радиоимпульсов, излученных на частоте fp, и в случае совпадения факта превышения порога в трех последовательно сформированных m-х массивах (совпадение по дальности), а также совпадения этих частот, превысивших порог спектральных откликов, принимают решение об обнаружении на соответствующей дальности малозаметного ВО.
13. Радиальную скорость обнаруженного ВО при анализе отражений k-й пачки радиоимпульсов рассчитывают по доплеровской частоте Fд соответствующего спектрального отклика, превысившего порог, по формуле Vr=Fдλk/2, где λk - длина волны зондирующего сигнала в k-й пачке радиоимпульсов.
В эксперименте /9/ резонансного обнаружения беспилотного летательного аппарата (БЛА) «Орлан-3» частота изменялась от 300 МГц (λ=1 м) до 3 ГГц (λ=10 см). Опыт повторялся 3 раза. Результаты измерений ЭПР показаны на фиг. 2. Из них видно, что при среднем значении ЭПР порядка σср≈0,03 м2 в условиях резонанса величина ЭПР достигает 0,16 м2, что в 5 с лишним раз превышает величину средней ЭПР σср. Резонанс наступает на частоте порядка 2780 МГц, что соответствует длине волны λр≈10,8 см. Это значит, что размер отражающего БЛА «Орлан-3» на нулевом курсовом угле составляет примерно 5,4 см. Совпадение характеристик, сформированных в разных опытах /9/, говорит о достоверности и устойчивости полученных экспериментальных результатов.
Как следует из описания /9/, из-за ограниченной (fmin≤150 МГц, λ≤2 м) нижней границы несущей частоты ЗС известный резонансный способ пригоден для обнаружения только малоразмерных (L≤1 м) ВО, а именно беспилотных летательных аппаратов (БЛА).
Кроме того, перестройка несущей частоты ЗС /9/ с шагом Δf=10 МГц в указанном диапазоне {150 МГц (λk=2 м) - 6 ГГц (λk=5 см)} приводит к необозримому числу частотных итераций. Следствием этого является увеличенное время обнаружения ВО и его возможный выход из зоны обнаружения РЛС.
Как показали эксперименты (фиг. 3) Заявителя настоящего изобретения, указанные недостатки известного резонансного метода могут быть устранены увеличением соответствующей длины волны РЛС и оптимальным выбором ограниченного числа несущих частот.
В пределе (фиг. 3) для обнаружения аэродинамических и баллистических ВО достаточно двух несущих частот метрового диапазона ЭМВ с соответствующей девиацией несущей частоты, например по линейному закону.
Однако при этом требуется решить ряд технических проблем, связанных с электромагнитной совместимостью и оперативной отстройки по частоте и угловому направлению от радиостанций и других источников регулярных и нерегулярных радиопомех, работающих в метровом диапазоне резонансных (фиг. 3) частот ВО.
Кроме того, в метровом диапазоне ЭМВ резко увеличиваются габариты обзорной антенны РЛС, требующие решения проблем юстировки и стабилизации параметров антенн, повышения их устойчивости к ветровым нагрузкам и к сезонному движению грунтов.
Обзорных РЛС со стационарными антеннами кругового обзора, сочетающих преимущества по пропускной способности обзорной РЛС /3/ и преимущества резонансных методов и средств раннего обнаружения воздушных объектов /5…9/ в длинноволновом диапазоне электромагнитных волн не выявлено.
Задачей изобретения является увеличение производительности обслуживания потоков воздушных объектов (ВО) и повышение дальности их обнаружения, в том числе гиперскоростных, малоразмерных и малозаметных аэродинамических и баллистических ВО, изготовленных с применением Stealth-технологии снижения их радиолокационной заметности.
Техническим результатом, обеспечивающим решение поставленной задачи, является создание неизвестной ранее автоматизированной РЛС кругового обзора со стационарной антенной метрового диапазона ЭМВ, использующей для повышения производительности и одновременно увеличения дальности действия РЛС резонансный метод обнаружения и распознавания ВО с параллельной и независимой обработкой резонансных эхосигналов от аэродинамических и баллистических ВО в каждом цикле обзора по дальности.
Сущность изобретения
Достижение заявленного технического результата и решение поставленной задачи обеспечивается тем, что радиолокационная станция (РЛС) кругового обзора содержит стационарную антенну кругового обзора (САКО) метрового диапазона ЭМВ, включающую секторные приемо-передающие антенны, ориентированные вдоль сторон правильного многоугольника и соединенные по сигналам зондирования и резонансным эхосигналам с аппаратной кабиной управления и обработки радиолокационных сигналов, входы/выходы которой соединены интерфейсными линиями кабельной связи с радиостанция цифровой связи и передачи данных и наземным радиозапросчиком «свой-чужой».
Причем каждая секторная приемо-передающие антенна содержит передающее антенно-фидерное устройство (АФУ) с многоканальным генератором зондирующих сигналов (ЗС), приемное угломестное АФУ резонансных эхосигналов и приемное азимутальное АФУ резонансных эхосигналов.
В оптимальном варианте исполнения САКО включает четыре стационарные секционные антенны, установленные по сторонам квадрата и выполненные с независимым электронным сканированием воздушного пространства на прием и передачу и девиацией частоты в области частот резонирования ВО.
Антенны САКО по резонансным эхосигналам и сигналам радиопомех соединены с общей аппаратной кабиной управления и обработки радиолокационных сигналов непосредственно, а по зондирующим сигналам (ЗС) - с кабиной через многоканальный генератор зондирующих сигналов.
Выбор в САКО метрового диапазона ЭМВ позволяет существенно увеличить эффективную поверхность рассеяния (ЭПР). ЭПР ВО в метровом диапазоне больше, чем в сантиметровом и дециметровом диапазонах ЭМВ. Увеличение среднего значения эффективной поверхности цели с увеличением длины волны объясняется возникновением резонансного отражения от элементов цели (фиг. 1), размеры которых «L» оказываются соизмеримы с длиной «λ» волны (L=λ/2). Заявителем экспериментально установлено, что в метровом диапазоне ЭПР малоразмерных ВО не менее чем в 10 раз больше, чем в сантиметровом диапазоне ЭМВ. С этой целью диапазон девиации рабочих частот РЛС кругового обзора выбран близким к резонансным (фиг. 3) частотам ВО.
При этом в выбранном диапазоне ЭМВ одновременно решается проблема поглощения и рассеивания ЭМВ. Это объясняется тем, что в метровом диапазоне ЭМВ меньше интенсивность отражений от гидрометеоров (облаков, тумана, дождя и т.д.). Это объясняется характером зависимости ЭПР капель (дождя, тумана) от длины волны. При d/λ<<1 ЭПР капель и их совокупности в метровом диапазоне ничтожно мала.
Кроме того, в метровом диапазоне характеристика вторичного излучения летательных аппаратов менее изрезана, и, следовательно, меньше флуктуации отраженных сигналов, чем в сантиметровом диапазоне. Поэтому вероятность обнаружения воздушных объектов (Робн) в границах зоны обнаружения РЛС метрового диапазона меньше зависит от дальности и проводка воздушных объектов более устойчива.
Выбор в САКО одинаковых диаграмм направленности (ДН) антенн по азимуту и углу места, одновременного сканирования ДН во времени и в пространстве, разнос их рабочих частот по секторам и длительности зондирующих импульсов обеспечивают оперативный круговой обзор воздушного пространства неподвижными раздельными на прием и передачу антеннами. Это обеспечивает высокие характеристики времени обзора и темпа обновления информации при требуемых значениях разрешающей способности и точности измерения координат.
Кроме того, за счет исключения в САКО электромеханических устройств сканирования увеличивается скорость обзора воздушного пространства. Отсутствие циркуляторов и фазовращателей с ограниченной надежностью для управления приемо-передающими ДН дополнительно увеличивает надежность работы САКО и РЛС кругового обзора со стационарными антеннами.
Кроме того, применение неподвижных и раздельных на прием и передачу антенн повышает надежность САКО при одновременном снижении степени сложности ее технической реализации и стоимости.
В целом указанные технические преимущества предлагаемой РЛС кругового обзора позволяют решить поставленную задачу по увеличению дальности обнаружения аэродинамических и баллистических ВО, изготовленных с применением Stealth-технологии снижения их радиолокационной заметности, в условиях массированного налета ВО и повышенной помеховой обстановкой.
Ссылка на чертежи
Сущность изобретения поясняется чертежами, представленными на фиг. 1…10 и фотографией - на фиг. 11.
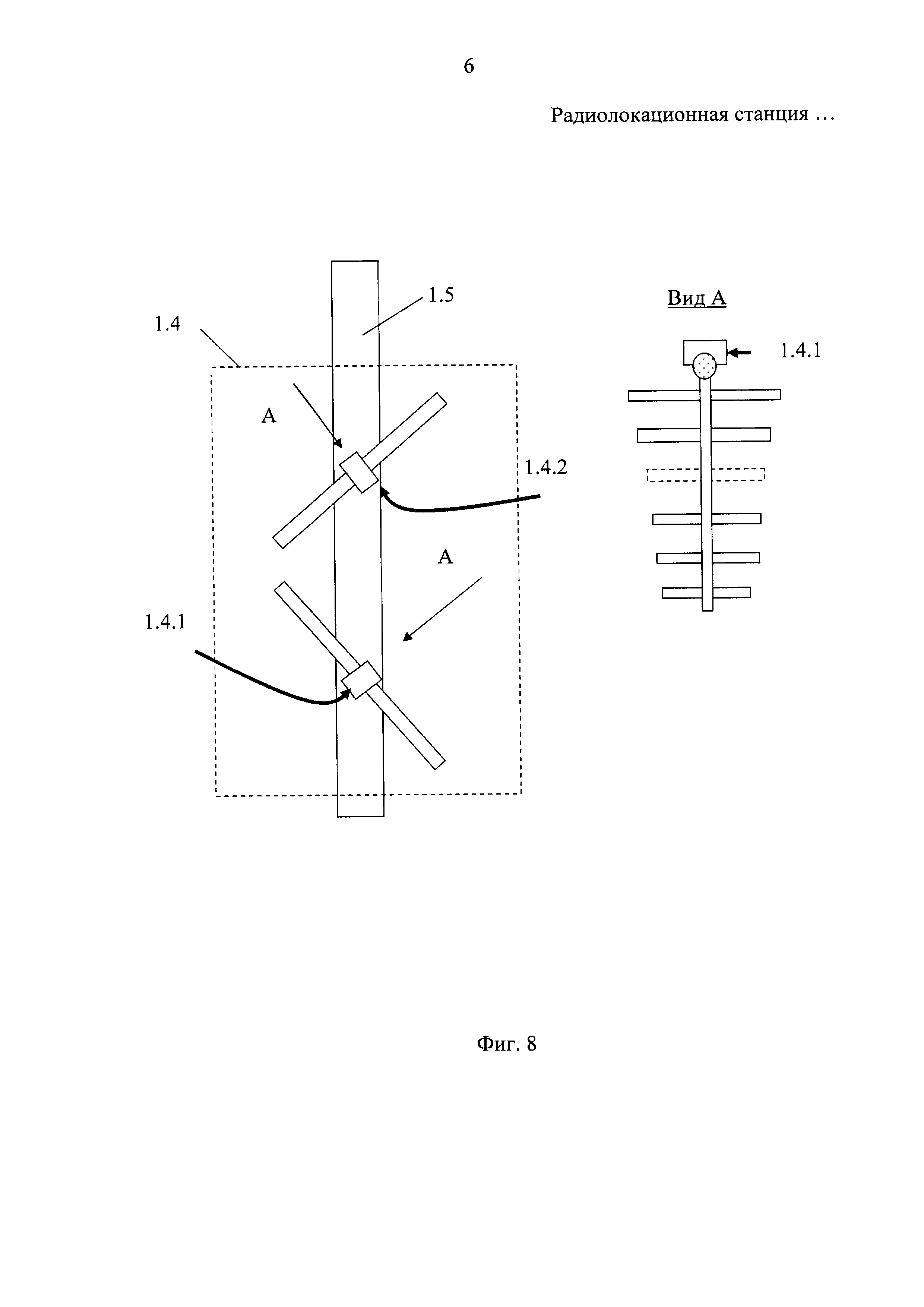
На фиг. 1 представлена зависимость амплитуды «U» отраженного высокочастотного сигнала от диаметра «D» площадного объекта; на фиг. 2 - зависимость ЭПР (σ) БЛА «Орлан-3» на нулевом курсовом угле от частоты зондирующего сигнала; на фиг. 3 зависимость резонансных значений ЭПР (арез) типовых ВО, включающих стратегическую (СА) и тактическую (ТА) авиацию, крылатые ракеты (КР) и головные части (ГЧ) баллистических ракет (БР), от длинны волны РЛС; на фиг. 4 - пример внешнего вида РЛС кругового обзора марки «Резонанс-Н», «Резонанс-НЭ» со стационарной антенной метрового диапазона ЭМВ; на фиг. 5 - функциональная схема РЛС «Резонанс-Н», «Резонанс-НЭ» в плане ее размещения на местности; на фиг. 6 - функциональная схема аппаратной кабины управления и обработки сигналов; на фиг. 7 - функциональная схема многоканального генератора высокочастотных зондирующих сигналов (ЗС); на фиг. 8 - конструкция двух - поляризационного излучателя передающего антенно-фидерного устройства на базе двух крестообразно установленных логопериодических вибраторных антенн (ЛИВА) с взаимной ортогональной поляризацией и под углом 45° к горизонту; на фиг. 9 - конструкция крестообразного вибратора приемных АФУ на основе двух диполей Надененко, расположенные перпендикулярно относительно друг друга и под углом 45° к горизонтальной плоскости; на фиг. 10 - рисунок, поясняющий принцип зондирования воздушного пространства двумя зондирующими сигналами резонансных частот большой и малой длительности для обнаружения баллистических и аэродинамических ВО соответственно; на фиг. 11 - фотография экрана кругового обзора РЛС с отметками резонансных отражений от ВО, их координат относительно месторасположения РЛС и с отображением режимов работы РЛС и параметров зондирующих сигналов в табличном виде.
На фиг. 1…11 обозначены:
А, Б, С, Д - сектора ответственности стационарной антенны кругового обзора (САКО);
1 - секторная антенна РЛС;
1.1 - передающее АФУ;
1.2 - приемное угломестное АФУ;
1.3 - приемное азимутальное АФУ;
1.4 - блок логопериодических вибраторных антенн (ЛПВА) передающего АФУ 1.1;
1.4.1, 1.4.2 - первая и вторая ЛПВА блока 1.4;
1.5 - крестообразный вибратор Надененко приемных АФУ;
2 - аппаратная кабина управления и обработки сигналов;
2.1 - блок многоканальных радиоприемников;
2.1.1, 2.1.2, 2.1.3, 2.1.4 - многоканальный радиоприемник резонансных сигналов ВО и помех от секторов А, Б, С, Д соответственно;
2.2 - блок устройств цифровой обработки сигналов (ЦОС) и измерения координат ВО;
2.3 - блок связи;
2.4 - блок формирования запросов и обработки сигналов «свой-чужой»;
2.5 - автоматизированное рабочее место (АРМ) оператора РЛС;
2.6 - выносное АРМ.
2.1 - коаксиальный кабель передачи короткого и длинного зондирующих сигналов (ЗС) на промежуточной частоте;
2.8 - многожильный кабель передачи цифровых сигналов управления шириной зондирующего луча;
3 - Многоканальный генератор высокочастотных зондирующих сигналов (ЗС);
3.1 - блок частотного преобразования ЗС и управления радиолучом;
3.2, 3.3 - первый и второй многоканальный усилитель с фиксированной и регулируемой фазой ЗС соответственно;
4 - радиостанция цифровой связи и передачи данных;
5 - наземный радиозапросчик (НРЗ).
Описание конструкции РЛС кругового обзора в статике
Конструктивно РЛС кругового обзора содержит секторную антенну кругового обзора (САКО), включающую четыре секторных антенны 1 с обзором воздушного пространства в каждом из секторов А, В, С, Д в диапазоне углов не менее 90° по азимуту и от 1,5° до 80° по углу места.
Каждая секторная антенна 1 содержит передающее антенно-фидерное устройство (АФУ) 1.1, приемное угломестное АФУ 1.2, приемное азимутальное АФУ 1.3.
Передающее АФУ 1.1 каждой секторной антенны 1 предназначено для последовательного зондирования своего сектора i∈{А…Д} ответственности (не менее 90° по азимуту и от 1,5 до 80° - по углу места относительно линии горизонта) веером узких (ε=6…8°, β=12…14°) и широких (ε=6…8°, β=90°) радиолучей с соответствующими пачками ЭМВ большой и малой длительности (фиг. 10) с частотами в диапазоне резонирования (фиг. 3) соответствующих ВО.
Так для обнаружения гипер (сверх) скоростных крылатых ракет (КР) и головных частей (ГЧ) баллистических ракет (БР) на максимальной дальности энергетически выгоден узкий радиолуч с увеличенной длительностью (фиг. 10) радиоизлучения и частотой f1i, i∈{А…Д} и линейной ее девиацией, находящейся в диапазоне резонансных частот (фиг. 3) обнаружения указанных ВО.
Для обнаружения менее скоростных ВО, например, тактической (ТА) и стратегической (СА) авиации важнейшим критерием выступает разрешающая и пропускная способность РЛС на минимально допустимой дальности и в максимально широкой зоне обзора.
В этих условиях может быть использован широкий радиолуч с менее энергетической плотностью энергии и более короткой длительностью радиоизлучения, требуемых для резонансного обнаружения ВО в ближней зоне.
При этом расширяется зона обзора пространства в ближней зоне и, как следствие, резко сокращается время обнаружения ВО и увеличивается пропускная способность РЛС.
Использование при этом короткой длительности радиоизлучения, требуемых для резонансного обнаружения ВО в ближней зоне с частотой f2i, i∈{А…Д} и линейной ее девиацией в диапазоне резонансных частот (фиг. 3) обнаружения авиационных ВО существенно увеличивает разрешающую способность РЛС пропорционально сокращению (фиг. 10) длительности зондирующего излучения. Дополнительное увеличение разрешающей способности РЛС обеспечивается далее в РЛС алгоритмически путем частотного сжатия принятых линейно модулированных ответных сигналов.
Каждое АФУ 1.1 САКО представляет собой излучающую антенную решетку, состоящую от 6 до 10 блоков 1.4 логопериодических вибраторных антенн (ЛИВА), закрепленных на внешней (в направлении обзора) боковой стороне антенной опоры 1.5 типа «башня». Согласно фиг. 8 каждый блок 1.4 ЛИВА содержит две крестообразно установленные ЛИВА 1.4.1 и 1.4.2, запитываемые от соответствующих каналов шкафов 3.2 и 3.3 усиления мощности ЗС многоканального 3 генератора высокочастотных ЗС соответствующего сектора обзора А…Д.
Входы шкафов 3.2 и 3.3 усиления ЗС через блок 3.1 частотного преобразования ЗС и управления шириной радиолуча соединены соответствующими кабелями 2.8 и 2.9 с выходами аппаратной кабины 2 управления и обработки сигналов соответственно по сигналам задающего генератора (двухчастотных длинного и короткого импульсов ЗС на промежуточной частоте) и сигналов текущего управления фазовым сдвигом несущей частоты между каналами генерации ЗС, определяющих ширину радиолуча (в каждом дальностном периоде зондирования).
Сигнальные входы кабины 2 соединены с выходами приемных АФУ 1.2 и 1.3 секторных антенн 1 секторов А…Д обзора воздушного пространства.
Приемные АФУ 1.2 и 1.3 предназначены для приема отраженных от ВО сигналов ЗС совместно с помехами.
Угломестное приемное АФУ 1.2 каждой секторной антенны 1 выполнено с вертикальным раскрывом антенного полотна и с возможностью одновременного приема сигналов веером лопатообразных приемных диаграмм направленности (ПДН) в секторе не менее 90° в азимутальной плоскости и в секторе 1,5-80° в угломестной плоскости и в оптимальном варианте исполнения представляет собой решетку из 8-ми крестовидных АЭ, размещенных на одной мачте.
Азимутальное приемное АФУ 1.2 каждой секторной антенны 1 выполнено с азимутальным раскрывом антенного полотна и с возможностью одновременного приема сигналов веерными ПДН не менее 90° по азимуту и от 1,5° до 80° по углу места. Оно представляет собой в оптимальном варианте решетку из 64-х крестовидных антенных элементов (АЭ) 1.5 /фиг. 9/, размещенных на 16-и мачтах (по 4 АЭ на каждой мачте).
Сзади от полотен 1.2 и 1.3 расположен соответствующий апериодический (пассивный) рефлектор (на фигурах не показано).
Каждый крестовидный АЭ 1.5 АФУ 1.2 и 1.3 представляет собой два 1.5.1 и 1.5.2 диполя Надененко (фиг. 9), расположенные перпендикулярно относительно друг друга и под углом 45° к горизонтальной плоскости.
Для оперативного возведения антенн 1 и поддержания стабильности электрических параметров АФУ 1.1…1.3 их антенные опоры выполнены стойкими к ветровым нагрузкам и сезонному движению грунтов типа антенных опор «Резонанс» /10/ - на металлических ростверках и винтовых сваях.
Антенные элементы 1.5 приемных АФУ 1.2 и 1.3 всех секторных антенн 1 электрически соединены с соответствующими многоканальными приемниками аппаратной кабины 2 управления и обработки сигналов.
Аппаратная кабина 2 содержит соединенные между собой интерфейсной линией связи: блок 2.1 секторных многоканальных радиоприемников 2.1.1, 2.1.2, 2.1.3, 2.1.4 для приема резонансных сигналов ВО и помех от соответствующих приемных антенн 1.2 и 1.3 секторов А, Б, С, Д соответственно; блок 2.2 устройств цифровой обработки сигналов (ЦОС) и измерения координат ВО; блок 2.3 подготовки радиолокационных данных для внешних пользователей радиолокационной информации (РЛИ); блок 2.4 формирования запросов и обработки сигналов «свой-чужой»; автоматизированное рабочее место (АРМ) 2.5 оператора РЛС и выносное АРМ 2.6.
Каждый радиоприемник 2.1.1, 2.1.2, 2.1.3, 2.1.4 блока 2.1 содержит два блока многоканальных супергетеродинных радиоприемников по 64 канала соответственно для приема и обработки длинных и коротких резонансных эхосигналов от баллистических и авиационных ВО, а также содержит панорамный радиоприемник с синтезатором частот для поиска угловых направлений и частот, свободных от помех для выбора в диапазоне резонансных частот (фиг. 3) очередной частоты зондирования воздушного пространства и приема ответных резонансных сигналов. Для исключения взаимных помех в указанных блоках установлены свои рабочие частоты обрабатываемых сигналов. Для исключения возможности подавления работы приемных каналов зондирующими и помеховыми сигналами усилители супергетеродинных приемников 2.1.1, 2.1.2, 2.1.3, 2.1.4 блока 2.1 выполнены логарифмическими.
Конструктивной особенностью блока 2.1 является также наличие аппаратно - программных средств (на фигурах не показано), обеспечивающих поиск, хранение и обновление допустимых частот зондирования (более 500 частотных каналов ЗС с шагом 1 кГц), свободных от радиопомех, и - угловых направлений приема, свободных от радиопомех, с шагом 6-8° в каждом секторе САКО (не менее 90° по азимуту и от 1,5 до 80° - по углу места относительно линии горизонта).
Другой конструктивной особенностью блока 2.1 является наличие аппаратно-программных средств, обеспечивающих формирование на промежуточной частоте двух очередных ЗС (длинного ЗС-1 и короткого ЗС-2 импульса) сдвинутых между собой по частоте, по ширине радиолуча и по времени (фиг. 10) в каждом периоде (Тп) обзора по дальности.
Выходы многоканальных радиоприемников 2.1.1, 2.1.2, 2.1.3, 2.1.4 блока 2.1 по эхосигналам и сигналам радиопомех, прошедших усиление, частотную и пространственную фильтрацию, а также пороговую обработку на предмет обнаружения ВО и источников помех, соединены с входами блока 2.2 устройств цифровой обработки сигналов (ЦОС) и измерения координат ВО.
Блок 2.2 выполнен модульной конструкции на программируемых логических интегральных схемах (ПЛИС) с перепрограммируемой памятью и содержит соединенные интерфейсными линиями связи: центральный процессор (сервер) управления и передачи данных; ведущий (ЦОС 1) и ведомый (ЦОС 2) блок цифровой обработки сигналов на частотах f1i, f2,i соответственно для каждого i-го сектора кругового обзора, i={1…4}; синхронизатор и вводно-выводное устройство для связи с АРМ 2.5, АРМ 2.6, а также - с внешними потребителями (3, 4, 5) расчетных данных.
Сервер блока 2.2 предназначен для: приема информации от ведущих блоков ЦОС, ее обработку и выдачу для отображения на дисплее АРМ 2.5 и АРМ 2.6 оператора РЛС; автоматического управления режимами работы РЛС; поиска резервных каналов, свободных от помех; контроля функционирования аппаратуры РЛС; отображение и регистрация информации; взаимодействие с НРЗ 5 и центром УВД.
Сервер блока 2.2 выполнен по стандартной схеме промышленной электронно-вычислительной машины на двух безоболочных компьютерах серии Core i7 и двух расширителях - мезонинах серии 4×1 Gbit Ethernet и 4 × RS422 с блоком перепрограммируемых Gard и Flesh памяти.
Конструктивной особенностью цифрового блока 2.2 является снабжение каждого его блока ЦОС-1 и ЦОС-2 двумя аналого-цифровыми преобразователями (АЦП) типа DR-16, соединенных по входу с выходами многоканальных радиоприемников 2.1.1, 2.1.2, 2.1.3, 2.1.4, для формирования потока оцифрованных текущих мгновенных значений радиосигналов в реальном времени для вторичной их обработки в сервере блока 2.2 и цифрового формирования диаграмм направленности (ЦФДН) на ВО в блоках ЦОС. Аппаратно-программный аппарат ЦФДН встроен в вычислительные блоки ЦОС и выполнен с возможностью формирования значения суммарного вектора принятого сигнала в каждом лепестке веера ЦФДН, вычисления его максимального значения и регистрации углового направления на ВО по максимальному значению суммарного вектора принятого сигнала. Алгоритм ЦФДН основан на принципе оценки когерентности эхо-сигналов, принимаемых каждым АЭ 1.5 (фиг. 9) приемных АФУ 1.2 и 1.3. Данные ЦФДН от узких лепестков ДН АФУ 1.2 и 1.3 при дальнейшей их корреляционной обработке в сервере позволяют определить азимут, угол места и высоту ВО, проводить траекторную обработку движения ВО для определения направления и скорости его движения в текущем радиолокационном масштабе времени.
По информационным сигналам и сигналам управления режимами обзора воздушного пространства блок 2.2 соединен с АРМ 2.5 и АРМ 2.6 оператора РЛС. По выходным параметрам РЛИ (количество ВО, их тип, дальность, азимут, скорость и высота полета) устройство 2.2 соединено через блок 2.3 подготовки радиолокационных данных и станцию 4 цифровой связи с внешними пользователями РЛИ, включая центр УВД. По запросным и ответным сигналам «свой-чужой» блок 2.2 соединен через блок 2.4 с наземным радиозапросчиком (НРЗ) 5 госопознавания. НРЗ 5 выполнен на базе вторичного радиолокатора типа «Лира ВМ-А» /11/. Дополнительно к основной задаче госопознавания данные НРЗ 5 предназначены для юстировки измерителей высоты блока 2.2 по барометрической высоте полета опознанного ВО, а также измерителей (блока 2.2) пространственных координат ВО по данным навигационной аппаратуры опознанного ВО.
Для стабильности и устойчивости связи НРЗ 5 и антенна станции 4 установлены на антенных опорах башенного конструкции «Резонанс».
Выходы блока 2.2 по частоте 2.7 очередного зондирования воздушного пространства и текущим сигналам 2.8 управления шириной зондирующих радиолучей в азимутальной плоскости соединены с входами многоканального генератора 3 высокочастотных зондирующих сигналов (ЗС) соответствующих секторов кругового обзора. Для уменьшения взаимных помех и котировочных ошибок каждый генератор 3 установлен в непосредственной близости от передающего АФУ 1.1 каждой секторной антенны 1 и соединен по промежуточным частотам ЗС с аппаратной кабиной 2 коаксиальными линиями связи равной длинны.
Описание работы РЛС кругового обзора в динамике
Радиолокационная станция кругового обзора «Резонанс Н», «Резонанс-НЭ» работает следующим образом.
Оператор РЛС (через АРМ 2.5 кабины 2 управления или дистанционно с выносного АРМ 2.6) или дежурный диспетчер УВД через радиостанцию 4 цифровой связи и передачи данных включает электропитание функциональных элементов 2…5 РЛС от сети или от дизельного генератора. При выходе параметров РЛС на рабочий режим сервер кабины 2 по команде с соответствующего АРМ или автоматически переходит в режим «функциональный контроль». При этом по высокочастотным сигналам юстировки (на фигурах не показано) производится автоматическая проверка работоспособности секторных антенн 1 и других функциональных элементов РЛС по соответствующим тестирующим программам. После положительных результатов функционального контроля РЛС оператор выбирает на АРМ требуемый режим и соответствующую программу обзора воздушного пространства на сервере цифрового устройства 2.2. При этом сервер по заданной программе обзора формирует набор команд управления функциональными элементами 1…5 РЛС. При этом по командам сервера блок 2.1 аппаратной кабины 2 формирует (фиг. 10) на промежуточной частоте маломощные зондирующие сигналы (ЗС) с параметрами в зависимости от установленного оператором АРМ 2.5 режима работы РЛС. Причем, на каждом такте зондирования воздушного пространства формируются два ЗС с различной длительностью, частотой и модуляцией. Одновременно блок 2.2 аппаратной кабины 2 формирует сигналы управления (СУ) направлением излучения и шириной радиолучей короткого и длинного радиоимпульса ЗС.
Сформированные сигналы ЗС и СУ по соответствующим кабелям 2.7 и 2.8 поступают из кабины 2 в соответствующий сектору обзора многоканальный генератор 3 высокочастотных ЗС. При этом модуль 3.1 генератора 3 переносит маломощные короткие и длинные ЗС соответствующих промежуточных частот на высокие рабочие частоты радиоизлучения, далее их усиливает, разделяет на две группы каналов по количеству каналов в каждой группе, соответствующих двум видам поляризации и количеству соответствующих антенных элементов 1.4.1 и 1.4.2 блока 1.4 логопериодических вибраторных антенн (ЛИВА) передающего АФУ 1.1. Далее по сигналам СУ в текущие, например, в длинные сигналы ЗС одной из поляризаций вносятся фазовые сдвиги для формирования узкого радиолуча и передача двух групп ЗС на два шкафа 3.2 и 3.3 многоканальных усилителей со сдвигом по фазе на 180° для длинных ЗС. В усилительных каналах шкафов 3.2 и 3.3 высокочастотные ЗС усиливаются и передаются по по фидерным каналам на соответствующие ЛПВА 1.4.1 и 1.4.2 всех блоков 1.4 передающего АФУ 1.1.
Передающая АФУ 1.1 всех или выделенных АРМ 2.5 секторов последовательно с темпом обзора по дальности (фиг. 10) зондирует свой сектор i∈{А…Д} ответственности с размерами не менее 90° по азимуту и от 1,5 до 80° - по углу места относительно линии горизонта) веером узких (ε=6…8°, β=12…14°) и широких (ε=6…8°, β=90°) радиолучей с соответствующими пачками ЭМВ большой и малой длительности с частотами в диапазоне частот (фиг. 3) резонирования соответствующих ВО.
Для снижения уровня шумов в паузе между ЗС на интервале периода повторения РЛС по дальности обзора после окончания излучения длинного и короткого радиоимпульсов каналы излучения запирают соответствующими бланкирующими стробами (фиг. 10).
Отраженные от ВО высокочастотные ЗС в форме резонансных эхосигналов (фиг. 1) совместно с помехами принимаются антенными полотнами угломестного АФУ 1.2 и азимутального АФУ 1.3. Указанные приемные АФУ обеспечивает прием радиосигналов в секторе не менее 90° в азимутальной плоскости и в секторе 1,5-80° в угломестной плоскости в диапазоне (фиг. 3), выделенном для резонансного обнаружения авиационных баллистических ВО.
Принятые угломестной АФУ 1.2 ВЧ сигналы поступают на 8 каналов горизонтального приема (ГП) и 8 каналов вертикального приема (ВП), а сигналы с азимутальной АФУ 1.3 на 16 каналов узкой диаграммы направленности (УДН) и 16 каналов широкой диаграммы направленности (ШДН) соответствующего блока 2.1 секторных многоканальных радиоприемников. В приемниках 2.1.1…2.1.4 блока 2.1 производится усиление принятых сигналов, их частотная селекция и распределение принятых сигналов на полукомплекты каналов с узкой диаграммой направленности (УДН) и широкой диаграммой направленности (ШДН) для совместной обработки данных по азимуту и высоте (16 УДН, 8 ГП, 8 ВП или 16 ШДН, 8 ГП, 8 ВП). Далее принятые высокочастотные (ВЧ) сигналы в результате тройного супергетеродинного преобразования переносятся с высокой частоты на промежуточные рабочие частоты. С выхода приемников 2.1.1…2.1.4 блока 2.1 сигналы на промежуточной частоте поступают на блок 2.2 устройств цифровой обработки сигналов ЦОС. Сигналы выдаются по 2×32 линиям (от каждого полукомплекта: 16 - азимут, 16 - высота) одновременно на два устройства ЦОС ведущий и ведомый. В устройствах ЦОС принятые сигналы промежуточной частоты преобразуются в цифровую форму. Далее в устройствах ЦОС по заданной программе первичной обработки цифровых сигналов производится сжатие цифровых сигналов по дальности путем их корреляционной обработки, сжатие сигналов с азимутального и угломестного направлений методом цифрового формирования диаграмм направленности (ЦФДН), определение радиальной скорости ВО методом когерентного накопления, режекцию пассивных помех (РПП) и пороговую обработку сигналов для обнаружения отметок от ВО.
С выхода блоков ЦОС цифровая информация об отметках ВО поступает в сервер блока 2. Сервер блока 2 по заданной программе вторичной обработки цифровой информации производит траекторную обработку сигналов ВО, прошедших пороговую обработку, формирование пакетов радиолокационных данных (РЛД). Одновременно сервер через блок 2.4 осуществляет взаимодействие с НРЗ 4 путем выработки запросных сигналов опознавания и коррекции данных РЛД путем сравнения измеренных параметров и ответных данных борта ВО.
Далее откорректированные пакеты РЛД передаются на АРМ 2.5 для визуального отображения радиолокационной обстановки на экране кругового обзора. Одновременно эти РЛД передаются через блок 2.3 связи и радиостанцию 4 цифровой связи и передачи данных в центр УВД для использования.
Изобретение не ограничивается выше приведенным примером его осуществления.
В рамках данного изобретения возможны и другие варианты его конструктивного исполнения. Так стационарная антенна кругового обзора может быть выполнена треугольной, пятиугольной или шестиугольной формы с соответствующими размерами ее секторов, обеспечивающих круговой обзор воздушного пространства. НРЗ 5 и радиостанция могут быть выполнены в наземном варианте, а их связные антенны - на общей мачте.
Промышленная применимость
Изобретение разработано на уровне опытного образца. Готовится его промышленное освоение и поставки в МО РФ («Резонанс-Н») и на экспорт под торговой маркой «Резонанс-НЭ».
Источники информации
1. Радиолокационная станция кругового обзора. RU 2522982, 18.09.2012.
2. Короткоимпульсный радиолокатор с электронным сканированием в двух плоскостях и с высокоточным измерением координат и скорости объектов. RU 2546999, 04.04.2014.
3. Наземная обзорная радиолокационная станция аэропорта и радиолокационная установка. RU 94016388, 27.05.1996.
4. Неподвижная антенна для радиолокатора кругового обзора и сопровождения. RU 2389111, 10.05.2010.
5. Теоретические основы радиолокации. / Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970, с. 276.
6. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984, с. 79, рис. 3-21.
7. Радиолокационное устройство распознавания воздушных целей. RU 2095823, 10.11.1997.
8. Structure resonant radar detection apparatus and method. US 4897660, 1986.01.14.
9. RU 2534217. Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов. 27.11.2014.
10 Антенная опора для приемной фазированной антенной решетки радиолокатора «Резонанс». ЗАО НИЦ "РЕЗОНАНС". RU 154296, 23.07.2015.
11. Трассовый радиолокационный комплекс "Лира. - Т", RU 34759, 10.12.2003.
12. Система опознавания "РАДИКАЛ". RU 49284, 10.11.2005.
Реферат
Изобретение относится к обзорным радиолокационным станциям (РЛС), конкретно к РЛС кругового обзора со стационарными антеннами, и может быть использовано в системах контроля и управления воздушным движением (УВД). Достигаемый технический результат - повышение производительности при одновременном увеличении дальности действия. Указанный результат достигается за счет того, что РЛС кругового обзора содержит секторную антенну кругового обзора, включающую четыре секторные антенны метрового диапазона электромагнитных волн, установленные по периметру правильного многоугольника, в центре которого установлены кабина управления и обработки радиолокационных сигналов, а также радиостанция цифровой связи и передачи данных и наземный радиозапросчик «свой-чужой». Средства, входящие в состав РЛС кругового обзора, определенным образом выполнены и взаимосвязаны между собой. 9 з.п. ф-лы, 11 ил.
Комментарии