Информация о вводе и выводе медицинского устройства с использованием распределенного измерения температуры оптическим волокном - RU2628638C2
Код документа: RU2628638C2
Чертежи

Описание
Настоящее изобретение относится к медицинским инструментам и более конкретно к измеряющим форму оптическим волноводам в медицинских применениях для оценки и определения ввода/вывода или другой информации для медицинских устройств.
Минимально инвазивные процедуры включают в себя выполнение небольших разрезов или отверстий для ввода устройств, чтобы выполнить процедуру. Во многих случаях важно знать точку ввода относительно устройства и пациента, например, чтобы определить участок устройства, в данный момент находящийся внутри тела, по отношению к участку снаружи части тела. Вводимые устройства обычно являются удлиненными и могут проникать в тело на значительное расстояние. Кроме того, длина может динамично изменяться в течение процедуры, изменяя часть инструмента, находящуюся в теле.
В соответствии с настоящими принципами система, устройство и способ включают в себя устройство с возможностью измерения, имеющее оптическое волокно, выполненное с возможностью выполнения распределенного измерения растяжения, вызванного температурой. Модуль интерпретации выполнен с возможностью приема оптических сигналов от оптического волокна внутри тела и обработки оптических сигналов для определения одного или более значений температуры или температурных градиентов устройства.
Рабочая станция включает в себя медицинский инструмент, включающий в себя измерительное устройство, по меньшей мере с одним оптическим волокном и выполненное с возможностью выполнения распределенного измерения растяжения, вызванного температурой. Предусмотрен процессор и память, соединенная с процессором, имеющая модуль обработки, сохраненный в ней и выполненный с возможностью приема оптических сигналов по меньшей мере от одного оптического волокна внутри объекта и обработки оптических сигналов для определения по меньшей мере одного значения температуры или температурного градиента устройства. Дисплей соединен с процессором и выполнен с возможностью отображения информации о температуре и/или температурном градиенте, относящейся к объекту.
Способ включает в себя этап, на котором собирают данные о растяжении от волоконно-оптического устройства для измерения растяжения, расположенного по меньшей мере в двух разных температурных областях; определяют точку температурного перехода между по меньшей мере двумя разными температурными областями на основании данных о растяжении и расположении точки перехода по отношению к медицинскому устройству, чтобы найти конкретное соответствующее место.
Эти и другие задачи, признаки и преимущества настоящего изобретения станут понятны из следующего подробного описания его иллюстративных вариантов осуществления, которые следует рассматривать совместно с сопровождающими чертежами.
Это изобретение будет представлено в подробном последующем описании предпочтительных вариантов осуществления со ссылкой на следующие чертежи, на которых:
Фиг.1 - блок-схема, показывающая систему и рабочую станцию, которая реализует систему измерения температуры/формы в соответствии с одним из вариантов осуществления;
Фиг.2 - графическое изображение, показывающее возможное отображение для индикации соответствующего положения между двумя температурными областями в соответствии с настоящими принципами;
Фиг.3 - чертеж измерительного устройства с поперечным сечением, показывающим множество оптических волокон в соответствии с одним из показанных вариантом осуществления; и
Фиг.4 - блок-схема, показывающая систему/способ сбора и применения измеренных данных растяжения для определения переходов температуры как эталонных положений в соответствии с другим показанным вариантом осуществления.
В соответствии с настоящими принципами представлена система для определения положения ввода/вывода медицинского инструмента и для определения того, какая часть инструмента находится внутри пациента по отношению к части инструмента снаружи. В соответствии с одним особенно полезным вариантом осуществления изобретения оптоволоконное устройство с возможностью измерения растяжения применяется с медицинским инструментом. Измерения формы, основанные на оптических волокнах, используют собственное отраженное рассеяние в обычном оптическом волокне. Указанный принцип использует измерение распределенного растяжения в оптическом волокне с помощью характеристических моделей отраженного рэлеевского рассеяния или других характеристик отражения. Оптоволоконное устройство с возможностью измерения растяжения прикреплено к медицинскому инструменту или встроено в медицинский инструмент таким образом, чтобы оптоволоконное устройство с возможностью измерения могло показывать форму так же, как и пространственно-разрешенное температурное распределение для медицинского инструмента. В одном варианте осуществления температура используется для измерения положения входа/выхода волоконного введенного устройства внутри тела. Эта информация может быть использована для вычисления длины инструмента внутри тела, поскольку устройство вводится и управляется далее в теле в масштабе реального времени.
В одном из примеров могут использоваться четыре или более волоконных сердцевин, когда одна сердцевина располагается в центре поперечного сечения, при таком расположении она способна разделять растяжение из-за изгиба от температурных воздействий (например, когда осевое растяжение (напряжение) отсутствует, или если напряжение известно и может регулироваться (или может быть откалибровано)). Определение и формы, и температуры может быть выполнено в одном варианте осуществления. В других вариантах осуществления могут быть измерены только температурные воздействия лишь одним оптическим волокном.
В одном из показанных вариантов осуществления система выполняет распределительное волоконно-оптическое измерение растяжения и температуры и способна восстанавливать форму удлиненного медицинского инструмента, когда пространственно-разрешенное измерение температуры используется для идентификации температурных градиентов, вызванных переходом между положениями внутри и снаружи тела. Измерения растяжения могут быть выполнены, чтобы определить форму устройства и определить конкретные локализации вдоль устройства с использованием температурных градиентов. Система способна определять участок устройства, находящегося внутри областей с разными температурами, например во внутренней области по отношению к наружной области человеческого тела, внутренней по отношению к наружной термически обработанной зоне (например, зоне испарения (абляции)), и т.д.
Кроме того, обнаружение фиксированного участка ввода может быть использовано для определения конкретной эталонной области ввода, которая перемещается в системе координат, относящейся к пациенту, вместо исходной лабораторной системы отсчета. Чтобы точно измерить форму, используется окружающая температура вокруг устройства измерения формы для калибровки устройства для использования при внутреннем вмешательстве, например компонент измерения формы, работающий при комнатной температуре снаружи тела, и второй компонент в организме, который работает при температуре тела. Точность измерения формы в обоих сегментах необходима, и поэтому желательна калибровка конкретной температуры сегмента.
Нужно понимать, что настоящее изобретение будет описано в терминах медицинских инструментов; однако идеи настоящего изобретения гораздо шире и применимы к любым волоконно-оптическим инструментам. В некоторых вариантах осуществления настоящие принципы применяются при отслеживании и анализе сложных биологических или механических систем (например, систем трубопроводов и т.п.). В частности, настоящие принципы применимы к операциям внутреннего отслеживания биологических систем, процедурам во всех областях тела, таким как легкие, желудочно-кишечный тракт, органы выделения, кровеносные сосуды и т.д. Элементы, указанные на чертежах, могут быть реализованы в различных комбинациях аппаратного и программного обеспечения и представляют функции, которые могут быть объединены в единый элемент или множество элементов.
Функции различных элементов, показанные на чертежах, могут быть выполнены посредством использования специализированного аппаратного обеспечения, а также аппаратным обеспечением, способным к выполнению программного обеспечения применительно к подходящему программному обеспечению. Если выполняются процессором, функции могут быть выполнены одним специализированным процессором, одним общим процессором или несколькими отдельными процессорами, некоторые из которых могут быть совместно используемыми. Более того, формальное использование термина «процессор» или «контроллер» не должно рассматриваться как относящееся исключительно к аппаратному обеспечению, способному выполнять программное обеспечение, и может в неявной форме включать в себя, без ограничения, аппаратное обеспечение с цифровым сигнальным процессором (“DSP”), постоянную память (“ROM”) для хранения программного обеспечения, оперативную память (“RAM”), энергонезависимую память и т.д.
Более того, все указанные здесь основополагающие принципы, аспекты и варианты осуществления изобретения, а также его конкретные примеры предназначены для осуществления как конструктивных, так и функциональных эквивалентов изобретения. Дополнительно имеется в виду, что такие эквиваленты включают в себя как известные в данный момент эквиваленты, так и эквиваленты, разработанные в будущем (т.е. любые элементы, разработанные чтобы выполнять те же самые функции, независимо от конструкции). Таким образом, например, будет понятно специалистам в данной области техники, что блок-схемы, представленные здесь, показывают концептуальные виды представленных компонентов системы и/или схемы, осуществляющие принципы изобретения. Также следует понимать, что любые структурные схемы, блок-схемы и тому подобное представляют различные процессы, которые могут быть по существу представлены машиночитаемым носителем и таким образом выполнены компьютером или процессором, независимо от того, показан ли формально такой процессор или компьютер или нет.
Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, доступного от используемого компьютером или машиночитаемого носителя, обеспечивающего программный код для использования компьютером или в связи с компьютером или любой системой, выполняющей команды. Для целей настоящего изобретения используемый компьютером или машиночитаемый носитель может быть любым устройством, которое может включать в себя, хранить, соединять, распространять или передавать программу для использования с помощью или в связи с системой выполнения команд, аппаратурой или устройством. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или аппаратом или устройством) или средой распространения. Примеры машиночитаемого носителя включают в себя полупроводниковую или твердотельную память, магнитную ленту, переносную компьютерную дискету, оперативную память (RAM), постоянную память (ROM), гибкий магнитный диск и оптический диск. Обычные примеры оптических дисков включают в себя компакт-диск - постоянную память (CD-ROM), компакт-диск - c возможностью перезаписи (CD-R/W), Blu-RayTM и DVD.
Вернемся теперь к чертежам, на которых одинаковые ссылочные позиции представляют те же или подобные элементы и, обращаясь вначале к Фиг.1, система 100 для выполнения процедуры, использующая датчики температуры, иллюстративно показана в соответствии с одним вариантом осуществления. Система 100 может быть использована вместе и применима ко всем применениям для операционных или хирургических процедур, которые используют волоконно-оптический устройство с возможностью измерения формы. Распределенное волоконно-оптическое измерение растяжения и температуры может быть применено для восстановления формы и/или температуры растягиваемого медицинского устройства 102. Пространственно разрешенное измерение температуры используется для определения температурных градиентов, вызванных переходами между местоположениями внутри и/или снаружи тела 131. Измерения растяжения применяются, чтобы определить форму устройства и определить конкретные участки, расположенные вдоль устройства, имеющего температурные градиенты. Участки устройства 102, расположенные внутри областей с разными температурами, например с внутренней стороны напротив внешней стороны человеческого тела или с внутренней стороны напротив внешней стороны термически обработанной зоны, могут быть определены.
Система 100 может включать в себя рабочую станцию или консоль 112, из которой наблюдают за операцией и/или управляют. Рабочая станция 112 предпочтительно включает в себя один или более процессоров 114 и память 116 для хранения программ и приложений. Память 116 может хранить оптический измерительный модуль и модуль 115 интерпретации, выполненный с возможностью обрабатывать оптические сигналы обратной связи от устройства измерения формы и/или температуры или системы 104. Оптический измерительный модуль 115 может быть выполнен с возможностью использования обратной связи с оптическими сигналами (и любую другую обратную связь, например, электромагнитное (ЕМ) отслеживание, данные живого мультимодального изображения или другие данные мониторинга, доступные в рамках среды клиники), чтобы исправить деформации, отклонения и другие изменения, связанные с медицинским устройством или инструментом 102 и/или окружающей их областью. Медицинское устройство 102 может включать в себя катетер, проволочный проводник, зонд, эндоскоп, робот, электрод, фильтр, баллон или другой медицинский компонент и т.д. В практически полезном варианте устройство 104 с возможностью измерения включает в себя конфигурацию измерения температуры, которая может быть использована совместно или независимо от медицинского устройства 102.
Система измерения температуры включает в себя модуль 115 и устройство 104 с возможностью измерения формы/температуры, установленное на устройстве 102 или встроенное в него. Измерительная система включает в себя оптическое устройство 108 опроса, которое производит селективные сигналы и принимает оптические ответы. Оптический источник 106 может быть представлен как часть устройства 108 опроса или как отдельный блок для формирования световых сигналов для устройства 104 измерения. Устройство 104 измерения включает в себя одно или более оптических волокон 126, которые соединены с устройством 102 в наборе образцов или образце. Оптические волокна 126 соединяются с рабочей станцией 112 по кабелю 127. Кабель 127 может включать в себя оптические волокна, электрические проводники, другое оборудование и т.д. по необходимости.
Устройство 104 измерения с оптическими волокнами может быть основано на оптико-волоконных сенсорах с брэгговской решеткой. Оптико-волоконная брэгговская решетка (FBG) представляет собой короткий отрезок оптического волокна, который отражает свет с определенными длинами волн и пропускает все остальные. Это достигается добавлением периодических изменений показателя преломления в сердцевине волокна, которое создает диэлектрическое зеркало с определенной длинной волны. Волоконная брэгговская решетка может таким образом быть использована как встроенный оптический фильтр, чтобы блокировать некоторые длины волн, или как отражатель с определенной длинной волны.
Фундаментальный принцип, лежащий в основе работы волоконной брэгговской решетки, представляет собой френелевское отражение на каждой поверхности раздела, на которой изменяется показатель преломления. Для определенных длин волн отраженный свет с разным периодом находится в одной фазе, так что существует усиливающая интерференция для отражения и, следовательно, ослабляющая интерференция для пропускания. Брэгговская длина волны чувствительна к растяжению так же, как и к температуре. Это означает, что брэгговские решетки могут быть использованы в чувствительных элементах в волоконно-оптических датчиках. В FBG сенсоре измеряемая величина (например, температура или растяжение) вызывают сдвиг в брэгговской длине волны.
Одним преимуществом этой технологии является то, что различные элементы сенсора могут быть распределены по всей длине волокна. Введение трех или более сердцевин с разными сенсорами (датчиками) по всей длине волокна, которое входит в структуру, дает трехмерную форму такой структуры, которая должна быть точно определена, обычно с точностью большей чем 1 мм. По длине волокна на разных местах может расположено быть множество сенсоров FBG (например, три или более волоконных сердцевин датчика). Из измерения растяжения каждой FBG можно предположить температуру и искривленность структуры на этом месте. Из большого числа измеренных положений может быть определена полная трехмерная форма и разница температур.
В качестве альтернативы волоконно-оптическим брэгговским решеткам может быть использовано некогерентное отраженное рассеяние в обычном волокне. Один такой подход заключается в использовании рассеяния Рэлея в стандартных одномодовых коммуникационных оптических волокнах. Рассеяние Рэлея получается как результат случайных флуктуаций в показателе преломления в сердцевине волокна. Эти случайные флуктуации могут быть смоделированы как брегговская решетка со случайным изменением амплитуды и фазы по длине решетки. С помощью использования этого эффекта в трех или более сердцевинах, идущих внутри единой длины кабеля с множеством сердцевин, могут быть зарегистрированы 3D форма, температура и динамические характеристики поверхности исследования.
Система 110 изображения может быть применена для изображения в реальном времени объекта 131 в процессе выполнения процедуры. Система 110 изображения может быть соединена с устройством 102 (например, внутривенным ультразвуковым (IVUS) и т.д.) или может быть применена наружно к объекту 131. Система 110 изображения может также быть выполнена для сбора и обработки предоперационных изображений (например, изображение объема 130), чтобы вычертить область исследования на объекте, чтобы создать изображение объема для регистрации и с пространством измерения формы/температуры.
В одном варианте осуществления рабочая станция 112 включает в себя модуль 148 генерации изображения, выполненный с возможностью принимать по меньшей мере один температурный градиент устройства 102 и регистрировать изображение по меньшей мере для одного температурного градиента или, иным образом отображать результаты от устройства измерения 104. Рабочая станция 112 включает в себя дисплей 118 для просмотра внутренних изображений объекта (пациента) 131 и может включать в себя верхний слой или другое изображение, показывающее точку ввода/вывода устройства 102 (и/или устройства 104 измерения). Фиг.2 показывает иллюстративное дисплейное изображение. Система 110 изображения может включать в себя рентгеноскопическую систему, систему компьютерной томографии (СТ), ультразвуковую систему и т.д. Дисплей 118 может также разрешить пользователю взаимодействовать с рабочей станцией 112 и ее компонентами и функциями, или любым другим элементом внутри системы 100. Это дополнительно облегчается интерфейсом 120, который может включать в себя клавиатуру, мышь, джойстик, тактильное устройство или любые другие периферийные или управляющие устройства, чтобы разрешить пользователю обратную связь от и взаимодействие с рабочей станцией 112.
В другом варианте осуществления система 100 включает в себя способ вычисления точки 140 ввода устройства 102 измерения формы/температуры в тело 131 без применения любой другой схемы изображения или отслеживания, или опираясь на другую внешнюю технологию, или введение/обозревание пользователя. Система 100 динамически вычисляет точку 140 ввода в реальном времени, чтобы знать точный участок устройства 104 измерения, входящего в тело 131. Для оптико-волоконной системы измерения формы обнаружение фиксированной точки 140 введения может быть использовано, чтобы точно определить конкретную исходную область ввода, которая перемещается в системе координат, относящейся к пациенту, вместо системы координат относительно окружающей среды (например, лаборатории или операционной). Для точного измерения формы окружающая температура вокруг оптического волокна 126 необходима как коэффициент калибровки устройства 104 для внутренних процедур. Например, окружающая комнатная температура преобладает на первом участке 142 устройства 104 измерения снаружи тела, а второй участок 144 в организме работает при температуре тела. Точность регистрации формы в обоих сегментах необходима, и поэтому предпочтительна калибровка конкретной температуры сегмента.
В одном из вариантов осуществления каждый из N сегментов 152 оптического волокна 126 может включать в себя компонент 154 эталонной температуры, чтобы обеспечить калибровочную температуру для каждого соответствующего сегмента 152. Это можно применить в процессе выполнения процедуры или как калибровочный этап до или после процедуры. Оптические измерения, записанные устройством 104 измерения с распределенными оптическими волокнами, могут быть откалиброваны в точных температурных значениях путем использования известных форм и напряжения оптических волокон в сочетании с независимым температурным эталоном 154, например отсчетом термистора, или видом волокна, чтобы знать температуры и температурные изменения на этапе калибровки.
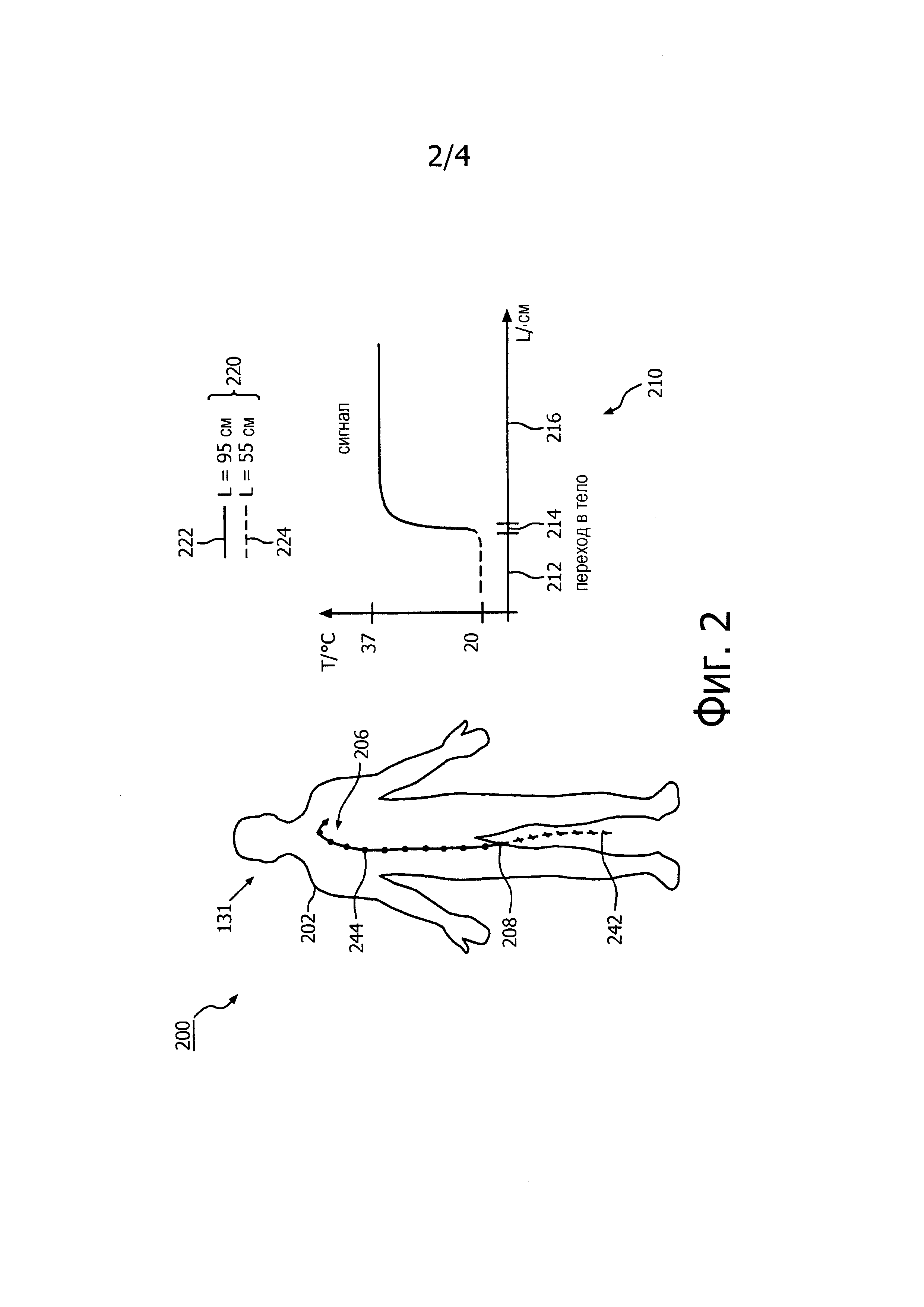
Рассмотрим Фиг.2, график или изображение 200, показывающее возможное отображение (например, на дисплее 118), указан иллюстративно. Визуализация 202 пациента может включать в себя базовый контур или может включать в себя действительное изображение в реальном времени или заранее записанное изображение пациента или части пациента. Изображение 200 может включать в себя визуализацию 206 устройства 104 измерения и может показывать разные текстуры или цвета, относящиеся к точке 208 ввода (температурное изменение). Например, первая часть 242 датчика 104 находится снаружи тела 131, а вторая часть 244 внутри тела 131.
График 200 включает в себя график 210, которая представляет средство вычисления в реальном времени длины устройства 102 измерения формы, которое находится внутри тела, что может быть нужно, например, для эндолюминальных применений как диагностических, так и терапевтических, чтобы взять биопсию из нужного целевого очага, вместо неверной области из-за перебора/недотягивания введенного устройства. Таким образом, усовершенствования в диагностике могут быть получены при проведении внутренних процедур. График 210 показывает внешнюю температурную область 212 и внутреннюю температурную область 216 и переходную температурную область 214. Переходная температурная область 214 представляет переход в тело 131, которая применяется для определения точки 208 ввода. Дополнительно запущенные вычисления 220 могут быть отображены, показывая введенную длину 222 и наружную длину 224. Другие графики и визуальные инструменты также рассматриваются и могут быть использованы.
Температура человеческого тела при 37 градусов Цельсия выше, чем окружающая температура в операционной или хирургической палате (примерно 20 градусов Цельсия, например, с воздушным кондиционированием и т.д.). Как результат в точке ввода, когда волоконное устройство вводится в тело, волокно будет подвергаться перепаду или градиентному изменению температуры от 20 до 37 градусов Цельсия (допуская, что человеческое тело имеет нормальную температуру). Это положение может быть динамически обнаружено в процессе продвижения устройства 104. Удельная теплоемкость, вносимая материалом, окружающим волокно, однако может привести к увеличению постоянных времени, влияющих на время ответа системы на температурные изменения. Это может быть принято во внимание при проектировании или при вычислении, например.
В альтернативном варианте осуществления данные измерения формы/температуры могут быть согласованы с данными изображения, как предоперационными, так и полученными в процессе операции, до тех пор пока точка 208 ввода видна в видимом пространстве. Например, изображение тела 131 и визуализация устройства 104 измерения могут быть отображены совместно. Точка 208 ввода может обеспечить общую метку для регистрации обоих пространств. Это указывает проблемы, связанные с регистрацией, когда волокно 126 само не видно в поле зрения, либо если отрезок 152 волокна, который присутствует, испытывает недостаток в существенном структурном элементе, чтобы дать возможность четкого бинокулярного зрительного воспроизведения (например, волоконное устройство появляется в виде единственной линии, проходящей через поле зрения).
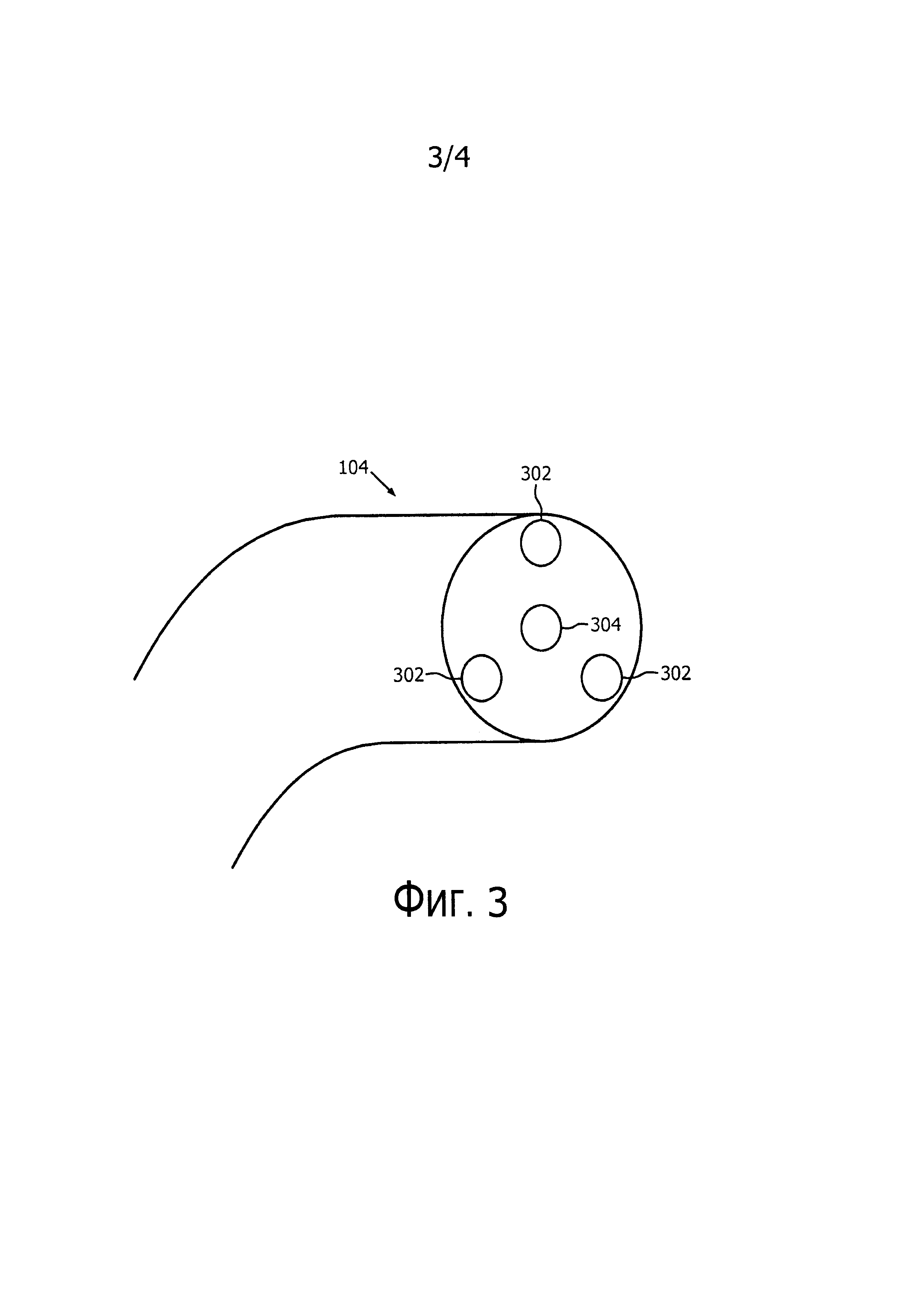
Рассмотрим Фиг.3, устройство 104 измерения формы/температуры иллюстративно показано с поперечным сечением. Оптическое волокно может быть использовано для измерения растяжения, и так же оно чувствительно к температуре. В одном из вариантов осуществления три внешних волоконных сердцевины 302 расположены вокруг четвертой центральной сердцевины 304. С такой конфигурацией отдельные измерения растяжения могут быть получены, давая в результате форму (сердцевины 302) и пространственно-разрешенную температуру (по всей длине) (сердцевина 304). Такая конфигурация работает лучше, если нет осевого растяжения. В большинстве сценариев осевым растяжением устройства 104 пренебрегают, поскольку устройство не растягивается в длину, и поэтому резонно допустить, что основное влияние в центральной сердцевине 304 возникает из-за температуры. Другие конфигурации могут также быть использованы, чтобы свести к нулю или учесть осевое растяжение, если оно есть. Например, вторая центральная сердцевина (не показана) с отличающимися от первой сердцевины свойствами может быть представлена так, что физическое растяжение и температурное растяжение можно различить. Вторая центральная сердцевина может быть снабжена различными свойствами или разными примесями, чтобы придать другой показатель преломления и/или коэффициент растяжения. Эти же самые свойства или отличия могут также быть приданы наружным сердцевинам (не только к центральной сердцевине или сердцевинам), где каждая сердцевина могла бы иметь разные особенности, так что измеренные различия допустили ли много решений, чтобы бы разложить на составляющие осевое растяжение, температурные значения и т.д.
Изменения в температуре по всей длине устройства 104 отслеживаются, чтобы динамично определить точку (208) ввода или в более общем случае определить положения внутри разных температурных областей. Как уже упоминалось, это можно соединить с предоперационными визуализациями, чтобы прогнозировать, будет ли достигнута цель. Также это можно использовать, чтобы согласовать и зарегистрировать предоперационную визуализацию с системой измерения формы, когда точка ввода также видна в устройстве получения изображения.
С конфигурацией из четырех сердцевин (302, 304) растяжения от температуры можно легко отличить от геометрических растяжений. Растяжения в сердцевинах 302 могут быть использованы для разрешения температурных областей вдоль волокон как геометрические, обозначенные сердцевинами 302, предоставляют информацию о положении по отношению к информации, полученной от центральной сердцевины 304. Дополнительно волоконно-оптический датчик 104 может обеспечить дополнительные оптические измерения, такие как отраженное рассеяние, и т.д., которые могут быть использованы для более точного решения некорректно оцененных проблем с помощью отделения температуры от изменений, вызванных деформацией в оптическом отраженном рассеянии.
Следует понимать, однако, что одна волоконная сердцевина может быть использована как температурный датчик. Это, в частности, полезно, когда другие растяжения в одиночном волокне известны. В волоконных конфигурациях с большим количеством сердцевин (например, вплоть до 7) желательно, чтобы сердцевины были равномерно или симметрично распределены вокруг центральной сердцевины. В одном примере, семь сердцевин могут быть использованы с 6 внешними сердцевинами в гексагональной форме и одной сердцевиной в центре. Другие конфигурации также могут быть рассмотрены.
Физическая длина и показатель преломления волокна по своей природе чувствительны к параметрам окружающей среды - температуре и растяжению, и к малейшему удлинению, давлению, влажности, электромагнитным полям, химическому воздействию и т.д. Сдвиг длины волны, Δλ, или сдвиг частоты, Δν, в структуре отраженного рассеяния из-за температурного изменения ΔТ, или растяжения вдоль оси волокна, ε, равен:

Температурный коэффициент КТ - это сумма коэффициента теплового расширения α и термооптического коэффициента
Использование температурных изменений, обнаруженных вдоль волокна, позволяет фрагментарную калибровку температурной константы и восстановление конкретной формы сегмента, которые должны быть применены к каждой области волоконного датчика (104). Это гарантирует точность измерения формы в каждой области несмотря на наличие температурного градиента в точке ввода (что должно обычно ухудшать выполнение локализации/регистрации формы).
Другие применения настоящих принципов могут включать в себя пульмонологию или другие эндолюминальные и эндоваскулярные применения, где положение цели такое, как очаг поражения, известно по предоперационным изображениям компьютерной томографии (СТ). Зная его, путь, который пульмонолог должен проложить, чтобы достигнуть цели, и длина пути также известны. В соответствии с настоящими принципами врач-консультант также знает длину устройства, которое двигается внутри тела, и совместно с 3D информацией о форме от устройства это значительно облегчает эффективность процедуры. Описанные примеры не должны рассматриваться как ограничивающие. Другие эндолюминальные процедуры, которые могли бы извлечь пользу из настоящих принципов, включают в себя применения в гастроэнтерологии, колоректальных процедурах, гинекологии, урологии и т.д. Устройство 104 измерения может быть встроено в одно или более следующих устройств: цистоскопы, риноларингоскопы, гастроскопы, колоноскопы, эзофагоскопы и т.д.
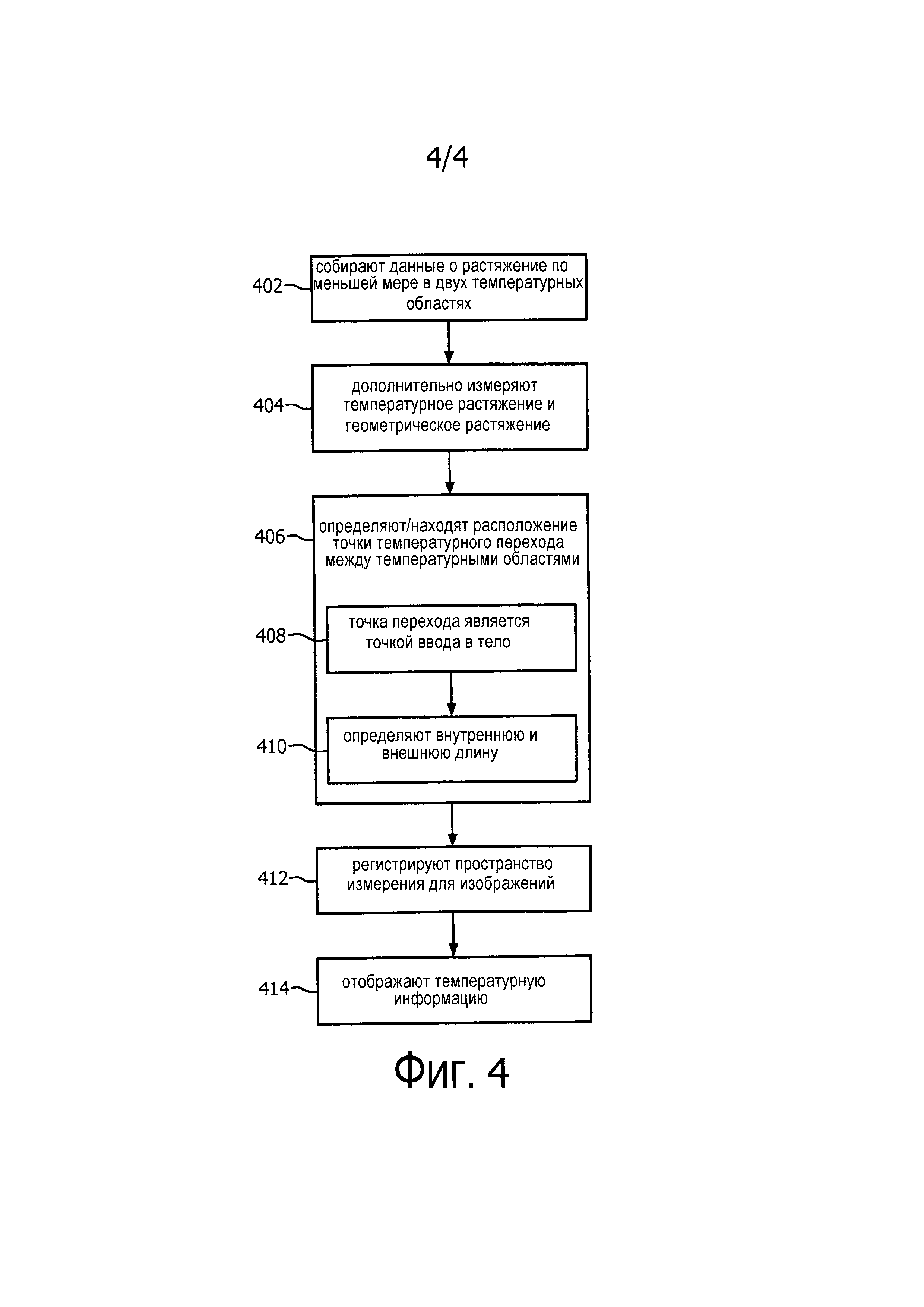
Рассмотрим Фиг.4, способ определения точки температурного перехода для расшифровки местоположения метки иллюстративно показан в соответствии с одним вариантом осуществления. В блоке 402 данные о растяжении собираются от волоконно-оптического устройства измерения, расположенного в пределах по меньшей мере двух разных температурных областей. Устройство измерения может включать в себя первый участок, имеющий первую температуру, и второй участок, имеющий вторую температуру, и первый участок находится внутри тела, а второй участок находится снаружи тела. В этом примере точка перехода включает в себя точку входа в тело. В другом примере первый участок может включать в себя термически обработанную зону (зону абляции, зону криогенной обработки и т.д.), а второй участок включает в себя эталонную температурную зону. Точка(и) перехода может быть использована для определения точки входа/выхода в теле, определения расстояния в теле до цели, определения области абляции и т.д.
Данные о растяжении могут включать в себя геометрические данные для определения формы медицинского устройства так же, как и температурные переходы. В блоке 404 данные измерения могут включать в себя растяжение, вызванное температурой и геометрически вызванное растяжением. Устройство измерения может включать в себя по меньшей мере четыре оптических волокна, сконфигурированных с тремя оптическими волокнами, которые окружают центральное оптическое волокно, так что три оптических волокна измеряют геометрическое растяжение, а центральное оптическое волокно измеряет растяжение, вызванное температурой. Другие конфигурации также рассматриваются.
В блоке 406 точка температурного перехода определяется между по меньшей мере двумя разными температурными областями на основании данных о растяжении. Любое количество областей может быть использовано. В блоке 408 точка перехода располагается относительно тела и/или медицинского устройства, чтобы найти конкретное отмеченное местоположение. В блоке 410 расположение точки перехода может включать в себя определение длины первого участка и длины второго участка.
В блоке 412 изображение тела может быть зарегистрировано для пространства регистрации температуры/формы, используя точку перехода в качестве отметки. В блоке 414 отображается информация о температуре. Точка перехода и/или температурный градиент может быть отображена для врача-консультанта, чтобы повысить точность, эффективность и т.д. процедуры.
При рассмотрении прилагаемых пунктов формулы следует понимать, что:
а) слово «содержащий» не исключает наличия других элементов или действий, кроме тех, что перечислены в данной формуле;
b) упоминание элемента в единственном числе не исключает наличия множества таких элементов;
с) любые ссылочные позиции в формуле изобретения не ограничивают ее объем;
d) несколько «средств» могут быть представлены одним и тем же объектом или аппаратным обеспечением, или программным обеспечением, реализуемым структурой или функцией; и
е) нет особой последовательности действий, использование которой подразумевается, кроме конкретно указанной.
Имея описанные предпочтительные варианты осуществления для информации о вводе и выводе, использующей распределительный оптико-волоконный датчик температуры, (которые предназначены быть иллюстративными, но не ограничивающими), заметим, что модификации и вариации могут быть сделаны специалистами в данной области техники в свете вышеописанных указаний. Поэтому должно быть понятно, что изменения могут быть сделаны в конкретных вариантах осуществления раскрытого изобретения, которые находятся в пределах вариантов осуществления, раскрыты здесь в общих чертах с помощью прилагаемых пунктов. После описания таким образом деталей и признаков, требуемого патентным законодательством, то, что заявлено и правовая охрана чего испрашивается в виде патента на изобретение, определено ниже в прилагаемой формуле изобретения.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам измерения формы с использованием распределенного измерения температуры оптическим волокном для медицинских устройств. Система измерения температуры с оптическим волокном содержит медицинское устройство, имеющее по меньшей мере одно оптическое волокно, выполненное с возможностью распределенного измерения растяжения, вызванного температурой, и измерения формы устройства, и модуль интерпретации, выполненный с возможностью приема оптических сигналов по меньшей мере от одного оптического волокна внутри тела и интерпретации оптических сигналов для определения по меньшей мере одного температурного градиента устройства, причем модуль интерпретации выдает по меньшей мере один определенный температурный градиент устройства. Рабочая станция для измерения температуры содержит медицинское устройство, включающее в себя измерительное устройство, имеющее по меньшей мере одно оптическое волокно, процессор, память, имеющую сохраненный в ней модуль интерпретации, выполненный с возможностью приема оптических сигналов от по меньшей мере одного оптического волокна в объекте интерпретации оптических сигналов, и дисплей, выполненный с возможностью отображения информации о температуре и/или температурном градиенте, относящейся к объекту. Способ определения точки температурного перехода содержит этапы, на которых собирают данные о растяжении от устройства измерения растяжения оптического волокна, включенного в медицинское устройство, причем устройство измерения растяжения оптического волокна расположено по меньшей мере в двух различных температурных областях, определяют по меньшей мере один температурный градиент по меньшей мере по двум упомянутым различным температурным областям из данных о растяжении, определяют геометрическое растяжение устройства измерения растяжения оптического волокна, определяют точку температурного перехода между по меньшей мере двумя различными температурными областями на основании данных о растяжении и располагают точку перехода по отношению к медицинскому устройству для нахождения определенного эталонного местоположения. Использование изобретений позволяет расширить арсенал средств измерения формы. 3 н. и 9 з.п. ф-лы, 4 ил.
Комментарии