Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн - RU2721622C1
Код документа: RU2721622C1
Чертежи

Описание
Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн
Область техники. Изобретение относится к области радиотехники, конкретно - к способу определения в реальном времени текущих интервалов относительной стационарности сигналов загоризонтной радиолокации.
Изобретение может применено к радиозондированию, радиопеленгации, радиосвязи, загоризонтной радиолокации (ЗГРЛ) в диапазоне декаметровых (ДКМ) радиоволн. Преимущественно может быть использовано в системах ЗГРЛ, работающих в условиях критического воздействия на радиоприем ионосферы, как нестационарной среды распространения радиоволн (РРВ), и всевозможных видов активных (АП) и пассивных помех (ПП).
Уровень техники. Используемые в настоящее время в загоризонтных радиолокаторах способы обработки локационных сигналов (ЛКС) - корреляционный прием и согласованная фильтрация, основаны на методах статистической радиотехники [1-4], ориентированной на предположения о стационарности радиоприема, на знание (экспериментальную оценку) законов распределения сигналов, на усредненную или медианную оценку их параметров (под локационным сигналом - ЛКС - далее будем понимать сигнал в любой точке трассы локации). Подсистемы адаптации ЗГРЛ управляют их настройками на основе знаний/измерений регулярных (устойчиво наблюдаемых) изменений гелиогеофизических условий (ГФУ) ионосферы [2, 3]. Поэтому в силу нестационарности ионосферно-пространственного распространения радиоволн (ИПРРВ) адаптация к ГФУ (АГФУ) ЗГРЛ адекватна лишь частным случаям по условиям функционирования (УСФ) систем ЗГРЛ [2-5] (под условиями функционирования в общем случае - УСФ - понимается наличие технических условий, присутствие на трассах ЗГ-локации любой возможной совокупности целей, многообразные мультипликативные воздействия (МП-воздействия) на распространяющийся сигнал, активные помехи, стохастические в целом условия ИПРРВ в ионосфере -рассеивающей и нестационарной среде). В основном по этим причинам достаточно часто при сложных условиях функционирования наблюдаются произвольно большие потери ΔI2 информации о цели, содержащейся в принимаемом (полезном в таком случае) сигнале (ПС). То есть, или фиксируется неприемлемое отклонение оценок параметров обнаруженной Цели от априори известных/оправданно ожидаемых, или констатируется невозможность обнаружения [1-5].
В [5] показано, что в общем по УСФ случае на пути по трассе локации ЛКС в основном в силу нестационарности ИПРРВ может претерпевать ряд преобразований, приводящих математически к переводу принимаемого сигнала в совершенно иное, чем ожидаемое по форме зондирующий сигнал (ЗС), функциональное пространство. Такое несоответствие обусловливает математическую некорректность в таких условиях постановки задачи обнаружения ПС, выделения и идентификации искомой информации, при использовании известных традиционных способов статистической обработки сигналов, с применением некорректных условий и допущений [2-6]. Это подтверждается практикой загоризонтной радиолокации [2, 3].
Описанное выше свидетельствует об актуальности решения проблемы адаптации систем ЗГРЛ к нестационарности ИПРРВ.
Известны способы и устройства, имеющие задачей или возможности решения в числе прочих этой проблемы. Их теоретические основы изложены во множестве трудов, например, в [2-5, 8-12 и др.]. Однако, они посвящены анализу и моделированию регулярных макроизменений ГФУ и не отражают в достаточной мере радиофизические характеристики (РФХ) тонкой стохастичной структуры ионосферы, являющейся источником МП-воздействий на ЛКС. В [3, 11, 12] лишь указывается на потенциальные возможности определения времени стационарности ЛКС с помощью ионозондов. В [13] излагается разработка «Динамической адаптивной структурно-физической модели декаметрового канала связи». В этой работе показано, что «практически все известные модели ДКМ канала относятся к классу феноменологических и не отражают реальные физические механизмы формирования поля сигнала в точке приема. От этого недостатка свободны модели, построенные на основе структурно-физического подхода. Однако из-за сложности и громоздкости физические модели в настоящее время практически не применяются при моделировании радиоканалов. Излагается опыт построения и эксплуатации, программно-ориентированной динамической адаптивной структурно-физической (ДАСФ) модели канала, в которой использованы предложенные авторами эффективные вычислительные приемы расчета траекторных и энергетических характеристик ДКМ-каналов. Важной отличительной особенностью ДАСФ-модели является то, что, наряду с прогнозированием традиционных характеристик и статистики поля сигнала, она позволяет определять его частотные, временные и пространственные корреляционные свойства. Причем все эти характеристики соответствуют конкретным условиям распространения на трассе, которые, в свою очередь, могут быть заданы прогнозом ГФУ или данными текущей диагностики «среды». В [14] описано моделирование ИПРРВ на основе ДАСФ-модели, что позволило получить расчетные оценки временной стационарности ионосферы - Δtст на различных трассах и в разных ситуациях по ГФУ, провести их сопоставление с экспериментальными данными, полученными с помощью современного ионозонда [15]. В итоге получены оценки Δtст от 2 сек до нескольких минут. Важно еще раз подчеркнуть: все оценки характеристик - статистические на достаточно репрезентативных выборках. В [16] описана методика текущих измерений параметров ионосферы путем трансионосферного спутникового зондирования. Получены оценки стационарности ионосферы, которые составляют 5-10 минут (на конкретных трассах и в конкретных ГФУ). В [9] приводятся данные по еще большему разбросу интервала оценок Δtст от нескольких секунд до десятков минут.
Практика магистральных ДКМ-каналов связи показывает, что устойчивость связи, напрямую связанная со стационарностью ИПРРВ, может в зависимости от сезонно-суточного цикла и периода солнечной активности длиться от единиц минут до нескольких часов.
Изложенное выше говорит о том, что фактически отсутствуют способы и аппаратные средства, удовлетворяющие требованиям в ЗГРЛ оперативных точных измерений в реальном времени интервалов стационарности ИПРРВ, обусловленных как регулярными, так и стохастическими изменениями ГФУ ионосферы, инвариантно к географии и направлениям трасс радиолокации.
Задача изобретения - решение описанных проблем адаптации систем ЗГРЛ новым способом оперативных измерений в реальном времени текущих интервалов относительной стационарности ИПРРВ и тем самым - обеспечение возможности обнаружения полезных сигналов, содержащих информацию о местоположении и параметрах движения Цели, в многообразных, в том числе самых общих и нестационарных условиях распространения радиоволн.
Средств и способов решения такой задачи на известном уровне техники не выявлено.
Техническим результатом, обеспечивающим решение сформулированной задачи, является создание нового, не известного ранее способа оперативных измерений в реальном времени текущих интервалов относительной стационарности ИПРРВ.
Сущность изобретения.
Достижение заявленного технического результата и решение поставленной задачи обеспечивается тем, что способ определения в реальном времени текущих интервалов относительной стационарности сигналов загоризонтной радиолокации включает циклическое с периодом Tδi, возвратно-наклонное (ВНЗ/δД) зондирование трасс радиолокации «пробными» δД-сигналами. Затем стандартный радиоприем и обработку принятых пробных сигналов




Выполнение описанных действий в их последовательности позволяет учесть особенности и преодолеть описанные недостатки известных способов оценки стационарности каналов ИПРРВ, реализовать в ЗГРЛ новый способ решения сформулированной задачи оперативных адекватных измерений в реальном времени текущих интервалов стационарности трасс локации и решить поставленную задачу изобретения по обеспечению возможности обнаружения полезных сигналов, содержащих информацию о местоположении и параметрах движения Цели, в многообразных, в том числе самых общих и нестационарных условиях распространения радиоволн.
Раскрытие сущности изобретения. Упомянутое ВНЗ/δД-зондирование с последовательным излучением РПД поочередно двух «пробных», отображаемых функциями Дирака (приближенно) сигналов: квазимонохроматического сигнала «включения» длительностью δДƒ и строб-импульса δДτ, необходимо для повышения адекватности модельных представлений о комплексном преобразовании ЛКС на трассах локации S0, что вытекает из определения δ-функции Дирака и отображаемых (1) и (2) «фильтрующих» свойств δ-функции Дирака [7, 17]:


где

Пробные сигналы δДƒ и δДт задаются в специальном генераторе в виде:
- импульсы «включения» δДƒ на рабочей частоте ƒp длительностью δДƒ=Δtпр ƒ≈tпр ƒ+Δtст/π:

где tпр ƒ - момент включения гармонического сигнала δДƒ,
Δtст - априорная начальная оценка текущего интервала стационарности.
- временные строб-импульсы δДτ на рабочей частоте ƒp длительностью
δДτ=Δtпр τ≈tпр τ+Тди:

где: tпр τ=(tпр ƒ+Δtст/π) - момент включения строб-импульса δДτ,
Тди - предельная технически-минимальная длительность сигнала δДτ (определяется реальными техническими возможностями РПД).
Длительность δД-сигналов для приближения к δ-функции Дирака должна соответствовать требованиям: Δtпр ƒ>ТП=1/FП>>τЗС, Тди<<τЗС, где ТП и FП - период и частота повторения ЗС, τЗС - длительность импульса ЗС. Как показывают расчеты обусловленности решений обратных и некорректно поставленных задач [6], величина Δtпр ƒ должна быть существенно больше минимальных значений, необходимых для получения близких к адекватным оценкам параметров принятого сигнала. При этом период повторения (длительность цикла) Тδ1 этих сигналов на первом шаге ВНЗ/δД-зондирования не должен превышать наименьшие из известных расчетных и/или статистических данных о минимальной длительности интервала Δtстmin≈2…5 сек. стационарности ДКМ-радиоканалов [9, 14, 16 и др.]. На последующих этапах ВНЗ/δД-зондирования этот период может задаваться величиной Тδ>5…10 сек.
Временное и частотное представление δД - сигналов в рамках текущих циклов ВНЗ/δД-зондирования в соответствии с (3) и (4) показано на фиг. 1. На временной развертке показаны один типовой цикл ВНЗ/δД-зондирования на периоде Тδ, включающий «длинный» импульс «включения», имитирующий монохроматический δДƒ-сигнал, минимально короткий строб-импульс, имитирующий «мгновенный» δДτ-сигнал, дальнейшая последовательность передачи зондирующего сигнала (ЗС) с периодом ТП. Видно, как процессы ВНЗ/δД-зондирования регламентируются с интервалами боевой работы с излучением ЗС. На частотной развертке показаны примерные представления ширины частотных спектров δД-сигналов.
Важно отметить, что порождение δД-модифицированных пассивных помех происходит в процессе всего комплекса несчетных в общем случае МП-воздействий на ВНЗ/δД-сигнал, идентичных генезису обусловленных передачей ЗС обычных ПП на трассах ИПРРВ. Отсюда констатируем, учитывая определение и свойства (1), (2) δ-функции Дирака: модель

где k, m - количество мод функционала, различное по сечениям ƒ, τ3, ограниченное целочисленными рядами [|kmin, kmax|], [mmin=1, mmax] при разных исходных данных по корректным априорно-экспериментальным данным, соображениям физической реализуемости и/или соответствия граничным условиям, предельным граничным значениям параметров,


Нормированную разницу («невязку») в метрике L2 модельных представлений

Так как «невязка» в (6) может устремляться к нулю только при относительном сохранении неизменными РФХ всех источников МП-воздействий, то именно пороговую оценку показателя

В соответствии с (6), при соблюдении (7), должен делаться алгоритмический вывод о принципиально важном пороговом изменении стационарности трассы локации в момент tδ (i, j) завершения текущего i -го
цикла ВНЗ/δД - сканирования на заданной трассе (или, что то же самое, - в момент начала (i+j) цикла). То есть, при выполнении хотя бы одного из условий (7) по любому параметру - делают вывод о переходе радиофизических условий (РФУ), имевших место в предыдущем интервале стационарности Δtст i, в качественно иное состояние на интервале Δtст(i+j). При сохранении изменений


Определяемый по критерию (7) интервал Δtст может быть равен неопределенному количеству периодов ВНЗ/δД - сканирования Тδ, так как значение

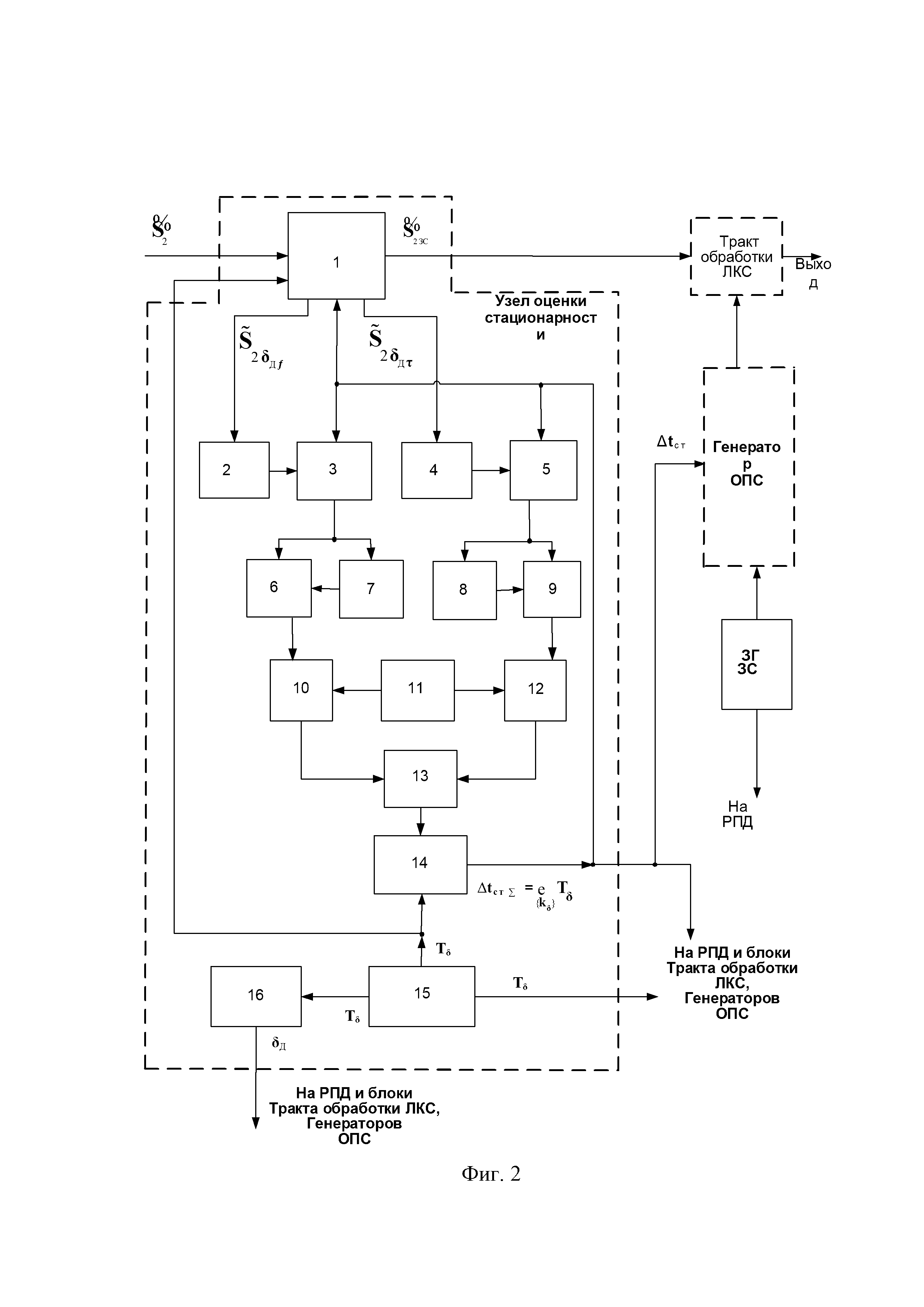
Структурная схема устройства, реализующая заявляемый способ оперативной оценки стационарности (ОСТ), представлена на фиг. 2 (радиоприемное устройство стандартного типа на схеме не показано, как предусмотренное по умолчанию).
В нее входят следующие функциональные блоки, отображающие описанные выше действия по способу:
1 - блок коммутации (с учетом локационной задержки) на интервале Tδi (длительности цикла ВНЗ/δД - зондирования) составляющей


2 - блок анализа в начале цикла Tδi на интервале ΔtAH ƒ≈Δtпр ƒ частотных характеристик
3 - блок генерации модели
4 - блок анализа на интервале ΔtAH τ≈Δtпр τ характеристик по задержке

5 - блок генерации модели
6 - блок вычисления показателя

7 - блок задержки сигнала модели


8 - блок задержки сигнала модели
9 - блок вычисления показателя
10 - блок альтернативного решения о критичном относительном изменении или сохранении на интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования текущего состояния стационарности ИПРРВ в сечении ƒ;
11 - блок генерации порога
12 - блок альтернативного решения о критичном относительном изменении или сохранении на интервале от i-го до (i+j)-го цикла ВНЗ/δД-зондирования текущего состояния стационарности ИПРРВ в сечении τ3;
13 - блок окончательного двумерного_альтернативного решения о критичном относительном изменении или сохранении на текущем интервале Тδ от i-го до (i+j)-го цикла ВНЗ/δД-зондирования текущего состояния стационарности ИПРРВ по критерию совпадения полученных ранее в сечениях ƒ и τ частных решений по оценкам стационарности ИПРРВ в блоках 10 и 12;
14 - блок оценки продолжительности непрерывного интервала стационарности Δtст Σ;
15 - блок задающего генератора циклов Тδ (периодов) ВНЗ/δД-зондирования;
16 - блок задающего генератора пробных δД-сигналов;
17 - блок тракта обработки ЛКС;
18 - блок генератор опорного сигнала;
19 - блок задающий генератор зондирующего сигнала.
Примечание: блоки 17, 18, 19 не входят в заявленный способ ОСТ, а показаны для лучшего понимания работы алгоритма на схеме фиг. 2.
Устройство (фиг. 2), реализующий заявляемый способ, работает следующим образом:
Принятый РПУ сигнал

С первого выхода блока 1 в момент начала цикла Tδi (то есть, одновременно - в момент tпр ƒ начала импульса δДƒ «включения») коммутируют составляющую


Сигналы со вторых выходов блоков 3 и 5 подают на входы блоков 6, 7 и 8, 9 соответственно. Блоки 7 и 8 реализуют задержку сигналов моделей




Таким образом, ЗГРЛ при применении заявляемого способа становится радиотехническим устройством со скользящей относительной адаптацией к нестационарности ИПРРВ. Важно заметить, что описанный способ текущих скользяще-относительных оценок стационарности ДКМ-радиоканалов инвариантен по отношению к условиям функционирования, способам обработки радиосигналов и их реализации.
Основными факторами, определяющими преимущества предлагаемого способа перед известными, являются:
- относительность и оперативность текущих оценок стационарности трасс ЗГРЛ, в силу этого - их независимость от регулярных и флюктуационных изменений ГФУ в сезонно-суточных циклах и периодах солнечной активности;
- инвариантность получаемых оценок стационарности ИПРРВ относительно географии трасс ЗГРЛ и их направлений;
- инвариантность получаемых оценок стационарности применительно к методам обработки сигналов в ЗГРЛ.
- отсутствие большинства применяемых априори условий и допущений (в различных комбинациях), делающих известные способы оценок стационарности принимаемых сигналов статистическими методами в общем по УСФ случае не адекватными;
- формирование двумерных оценок стационарности в максимально возможной мере соответствует реальным и самым сложным в общем случае условиям формирования стохастичных принимаемых ДКМ-сигналов.
Эффективность заявляемого способа была проверена ЭВМ-моделированием. Ставилась задача определения стационарности принятого сигнала, задаваемого с огибающей по нормальному закону с произвольными вариациями тренда изменений амплитуд. Получены результаты оценок тренда с ошибками не более 5%.
Использованные источники информации
1. Левин Б.Р. Статистическая радиотехника. - М., «Советское радио», 1966.
2. Под ред. Колосова А.А. Основы загоризонтной радиолокации. - М., "Радио и связь", 1984.
3. Акимов В.Ф., Калинин Ю.К. Введение в проектирование ионосферных загоризонтных радиолокаторов. Под ред. Боева С.Ф. - М., Техносфера, 2017.
4. Исимару А. Распространение и рассеяние волн в случайно-неоднородных средах. - М., «Мир», 1981, т. 1, 2.
5. Амбарцумов К.С., Арефьев В.И., Гордеев В.А., Талалаев А.Б. Обобщенный функциональный анализ информационных радиосистем. - Тверь, «Вестник ТвГУ. Серия «Прикладная математика», 2015, №1.
6. Герасимов Ю.С., Гордеев В.А., Кристаль B.C. Оценка параметров возмущающих воздействий на трассах дальней радиосвязи. - М., "Радиотехника", 1982, №9.
7. Тихонов А.Н., Гончарский А.В., Степанов В.В., Ягола А.Г. Регуляризующие алгоритмы и априорная информация. - М., «Наука», 1983.
1. Альперт Я.Л., Гинзбург В.Л., Фейнберг Е.Л. Распространение радиоволн.-- М., Гостехиздат, 1953.
2. Благовещенский Д.В. Распространение декаметровых радиоволн в высоких широтах. - М., "Наука", 1981.
3. Price R., Green Р.Е. A communication technique for multipatch channels. PIRE, v. 46, №3, 1958.
4. Яковлев О.И., Якубов В.П., Урядов В.П., Павельев А.Г. Распространение радиоволн. - М, изд-во URSS, 2015.
5. Вертоградов Г.Г. Комплексные исследования ионосферного распространения декаметровых радиоволн на трассах разной протяженности. Дисс. на соискание степени д-ра физ.-мат. наук. - Ростов-на-Дону, 2007, 432 с.
6. Барабашов Б.Г., Вертоградов Г.Г. Динамическая адаптивная структурно-физическая модель декаметрового канала связи. - М., «Математическое моделирование», 1996, т. 8, №2, с. 3-18.
7. Барабашов Б.Г., Вертоградов Г.Г. Определение времени стационарности ионосферного радиоканала. - М., «Математическое моделирование», 1996, т. 8, №2.
8. Вертоградов Г.Г., Урядов В.П., Вертоградов В.Г., Кубатко С.В. Патент №2399062 РФ МПК G01S 1/08, 3/46 (2006.01). Ионосферный зонд-радиопеленгатор. Заявл. 15.07.2009. Опубликовано 10.09.2010. Бюлл. №25, с. 16.
9. Smirnov V.M., Tynyankin S.I., Guzenko О.В. Ionosfernoe Obespechenie Sredstv Korotkovolnovoi Svyazi s Ispol'zovaniem Sputnikovykh Navigatsionnykh Sistem GLONASS/GPS [Means Provided by Ionosphere for Short-Wave Communication Using'Satellite Navigation Systems GLONASS/GPS]. G. Fryazino: FIRE im. V.A. Kotel'nikova RAN. Moscow, Innovatsionnyi nauchno-tekhnicheskii tsentr, 2012 (in Russian).
10. Колмогоров A.H., Фомин С.В. Элементы теории функций и функционального анализа. - М., «Наука», 1972.
Реферат
Изобретение относится к области радиотехники, конкретно к способу определения в реальном времени текущих интервалов относительной стационарности сигналов загоризонтной радиолокации и предназначено для обеспечения адаптации систем загоризонтной радиолокации методом оперативных измерений текущих интервалов стационарности ионосферно-пространственного распространения радиоволн. Измерение текущих интервалов стационарности производится путем циклического сканирования трасс локации методом возвратно-наклонного зондирования (ВНЗ) δ-зондирования с периодом Т, задаваемым генератором циклов. Далее поочередно излучают на рабочей частоте два «пробных», отображаемых функциями Дирака, сигнала - квазимонохроматического «включения» и строб-импульса. Затем осуществляют радиоприем, коммутацию составляющих,принятых пробных сигналов. Далее оценивают стационарности пробных сигналови обрабатывают их с учетом локационной задержки. 2 ил.
Формула



Документы, цитированные в отчёте о поиске
Способ регуляризованного обнаружения полезных радиосигналов
Комментарии