Способ и устройство для обнаружения перемещения поверхности объекта - RU2437116C2
Код документа: RU2437116C2
Чертежи

Описание
Техническая область изобретения
Настоящее изобретение относится к способу обнаружения перемещения поверхности объекта с помощью устройства обнаружения, при этом объект является неподвижным во время процесса обнаружения, расположен в пространстве на противоположной стороне непрозрачной стенки относительно устройства обнаружения и имеет относительную диэлектрическую проницаемость εr, большую чем 1,1. Изобретение также относится к устройству обнаружения для осуществления указанного способа. В частности, настоящее изобретение относится к способу обнаружения перемещения, например, стен/потолка в закрытом рабочем месте, таком как индустриальная печь.
Предпосылки изобретения и предшествующий уровень техники
При выполнении мониторинга стен, потолков и этажей в местах с экстремальными условиями, к которым относится температура, влажность, и т.д., не рекомендуется или даже невозможно поместить мониторинговое или измерительное оборудование непосредственно в этих местах. Существует значительный риск того, что оборудование немедленно разрушится или сократится срок его службы. Возможные экстремальные условия могут, например, быть чрезвычайной низкой температурой, очень высокой температурой, очень высоким давлением, высокой влажностью воздуха, химически коррозийными веществами, другой окружающей средой, не подходящей ни для людей, ни для оборудования, и/или комбинацией любого из вышеупомянутых условий окружающей среды. Такие места обычно разграничиваются непрозрачными стенками, которые делают выполнение мониторинга еще более трудным.
Близкая техническая область и/или решение состоят, среди всего прочего, в обнаружении и идентификации установленных инженерных и противопехотных мин. Здесь используется радиолокационная технология, в которой один или два передатчика передают сигналы, после чего приемник получает сигналы, отраженные разными объектами в земле, на глубину приблизительно до одного метра. Специалист должен впоследствии изучить картографию отраженных сигналов и обнаружить, или скорее идентифицировать, отклонения от общего гомогенного объема песка, почвы, глины, камня, и т.д. Однако недостатки этого способа заключаются в том, что точное местоположение или глубина ожидаемого месторождения неизвестны и, кроме того, структура и характерные особенности земли изменяются непрерывно, что делает обнаружение еще более трудным.
Другой близкой технической областью является мониторинг закрытых, недоступных мест, таких как военные бункеры или снесенные здания, чтобы обнаружить, имеются ли там люди. Здесь также используется радиолокационная технология, в которой один или два передатчика передают сигналы, после чего приемник получает сигналы, отраженные разными объектами позади непрозрачной стенки. Эксперт должен впоследствии изучить картографию отраженных сигналов и идентифицировать характерное радиолокационное эхо, имеющее отношение к человеку. Однако конструкция места и размещение стен неизвестны и также расцениваются как несущественные в такой операции.
Сущность изобретения
Задачей настоящего изобретения является устранение вышеупомянутых недостатков известных способов обнаружения перемещения поверхности невидимого объекта, а также в обеспечении улучшенного способа. Главная цель изобретения состоит в создании способа, который ясным образом визуализирует перемещения поверхности рассматриваемого объекта. Это влечет за собой то, что оператор даже при малейшем намеке на перемещение точно знает, куда и как переместилась поверхность объекта, чтобы быть в состоянии планировать ремонт и отключение, которые, если не запланированы и должны быть выполнены незамедлительно, являются очень дорогостоящими.
В соответствии с изобретением, поставленная цель достигается путем создания определенного во вводной части способа, включающего отличительные признаки, определенные в независимом пункте 1 формулы изобретения. В соответствии со вторым аспектом изобретение относится к устройству обнаружения, предназначенному для обнаружения перемещения поверхности объекта, невидимого для устройства обнаружения.
Таким образом, в соответствии с настоящим изобретением предложен способ, определенный во вводной части, который отличается тем, что включает этап создания модели данных объекта и вышеупомянутого пространства, причем указанную модель данных сохраняют в центральном процессоре, имеющемся в устройстве обнаружения, этап передачи радиолокационных сигналов в форме радиолокационных импульсов, частотные компоненты которого распределены в пределах частотного диапазона от 30 МГц до 12,4 ГГц, этап получения отраженных радиолокационных сигналов, созданных в точках отражения, состоящих из диэлектрических ступеней, когда радиолокационные сигналы проходят, соответственно, в объект и из объекта, этап сравнения полученных отраженных радиолокационных сигналов с переданными радиолокационными сигналами для получения корреляционных результатов, каждый из которых сообщает о расстоянии между двумя известными положениями через указанные точки отражения, этап дифференциального анализа различных корреляционных результатов, полученных в течение времени, чтобы обнаружить перемещение конкретной точки отражения поверхности посредством дифференциального анализа различных корреляционных результатов, принадлежащих по меньшей мере трем взаимно отдельным наборам двух известных положений, однозначно определяющих местоположение конкретной перемещенной точки отражения, создавая радиолокационную модель перемещения поверхности объекта, и этап визуализации радиолокационной модели в вышеупомянутой модели данных.
Предпочтительные варианты выполнения предложенных способа и устройства обнаружения дополнительно отражены в зависимых пунктах формулы изобретения, а также в следующем ниже подробном описании предпочтительных вариантов выполнения.
Таким образом, основная проблема, которая должна быть решена, состоит в том, чтобы осуществлять мониторинг или измерять состояние стенок в пространстве, предпочтительно в месте осуществления производственного процесса, таком как печь на сталелитейном заводе, которая подвержена в особенности критическим условиям. Возможные критические условия могут, например, быть чрезвычайной низкой температурой, очень высокой температурой, очень высоким давлением, высокой влажностью воздуха, химически коррозийными веществами, другой окружающей средой, не подходящей ни для людей, ни для оборудования, и/или комбинацией любого из вышеупомянутых условий окружающей среды. Вышеупомянутый мониторинг желательно также осуществлять непрерывно, когда процесс запущен, что исключает возможность осуществления проверок, когда в пространстве не осуществляется никакой операции. Благодаря размещению мониторингового оборудования снаружи пространства и выполнению проверки объекта, обеспечивая распространение радиолокационных сигналов от передатчика через стенку пространства, отражаясь от объекта, и путем отражения назад через указанную стенку к приемнику, мониторинговое оборудование будет, таким образом, полностью защищенным, поскольку никакая часть этого оборудования не находится в экстремальных условиях.
В соответствии с настоящим изобретением, положение объекта, мониторинг которого осуществляется, известно и, кроме того, все пространство, мониторинг которого осуществляется, может также быть расценено как неподвижное как до, так и после перемещения, которое было вызвано обнаружением. С помощью изобретения могут быть обнаружены перемещения поверхности объекта, что может быть визуализировано в трехмерной модели данных пространства, мониторинг которого осуществляется. Мониторинг может осуществляться непрерывно, и если происходит некоторое перемещение, которое может быть обнаружено, то может быть запущена автоматическая тревожная сигнализация.
Краткое описание приложенных чертежей
Более полное понимание вышеупомянутых и других признаков и преимуществ настоящего изобретения будет получено из следующего подробного описания предпочтительных вариантов выполнения совместно с сопровождающими чертежами, на которых:
Фиг.1 представляет собой схематический вид сверху устройства обнаружения в соответствии с изобретением, объекта, который должен быть обнаружен, и пространства, в котором расположен объект,
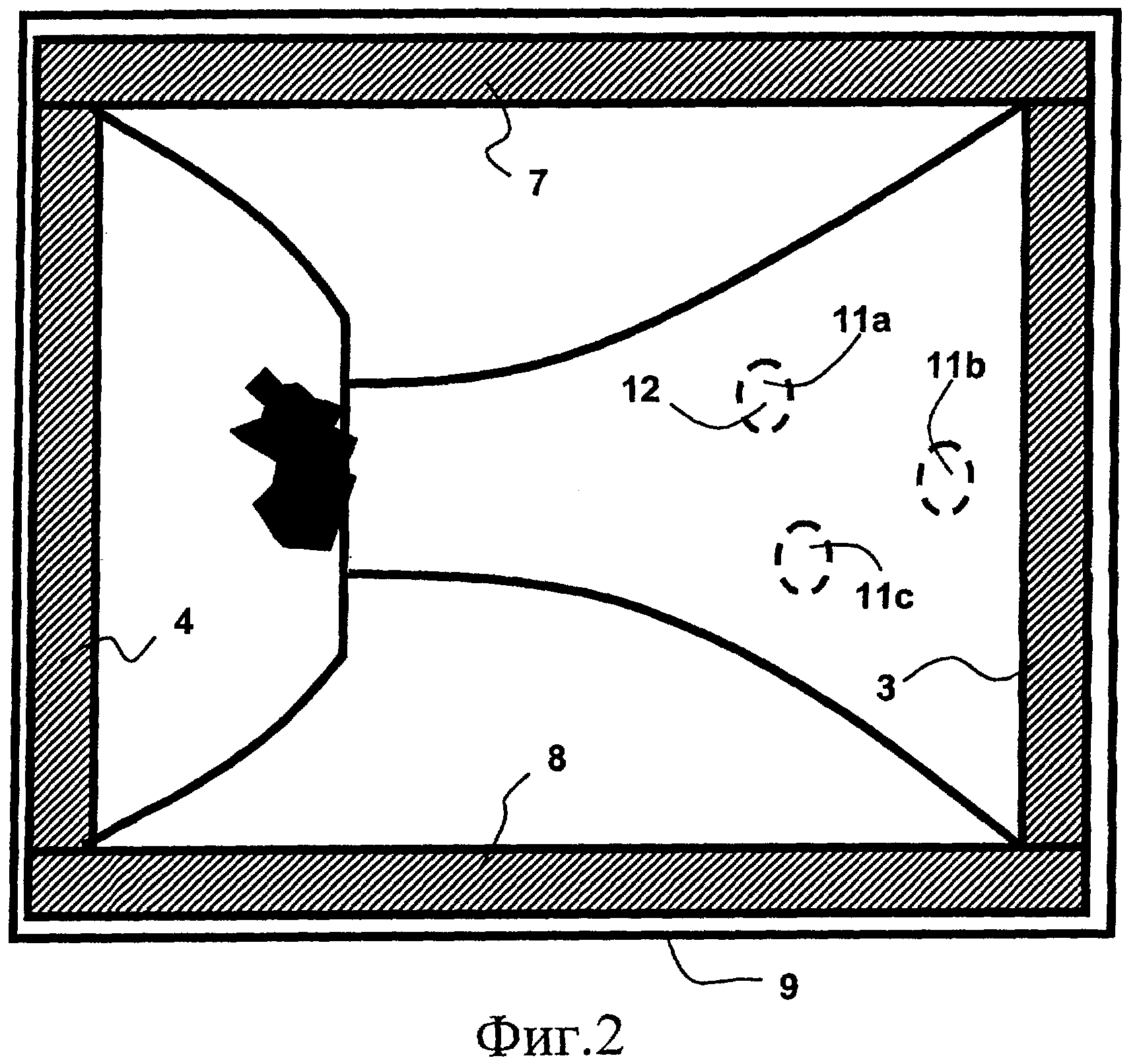
Фиг.2 представляет собой схематическую трехмерную визуализацию модели данных пространства, в котором обнаружено перемещение поверхности задней стенки и представлено радиолокационной моделью, которая помещена в модель данных,
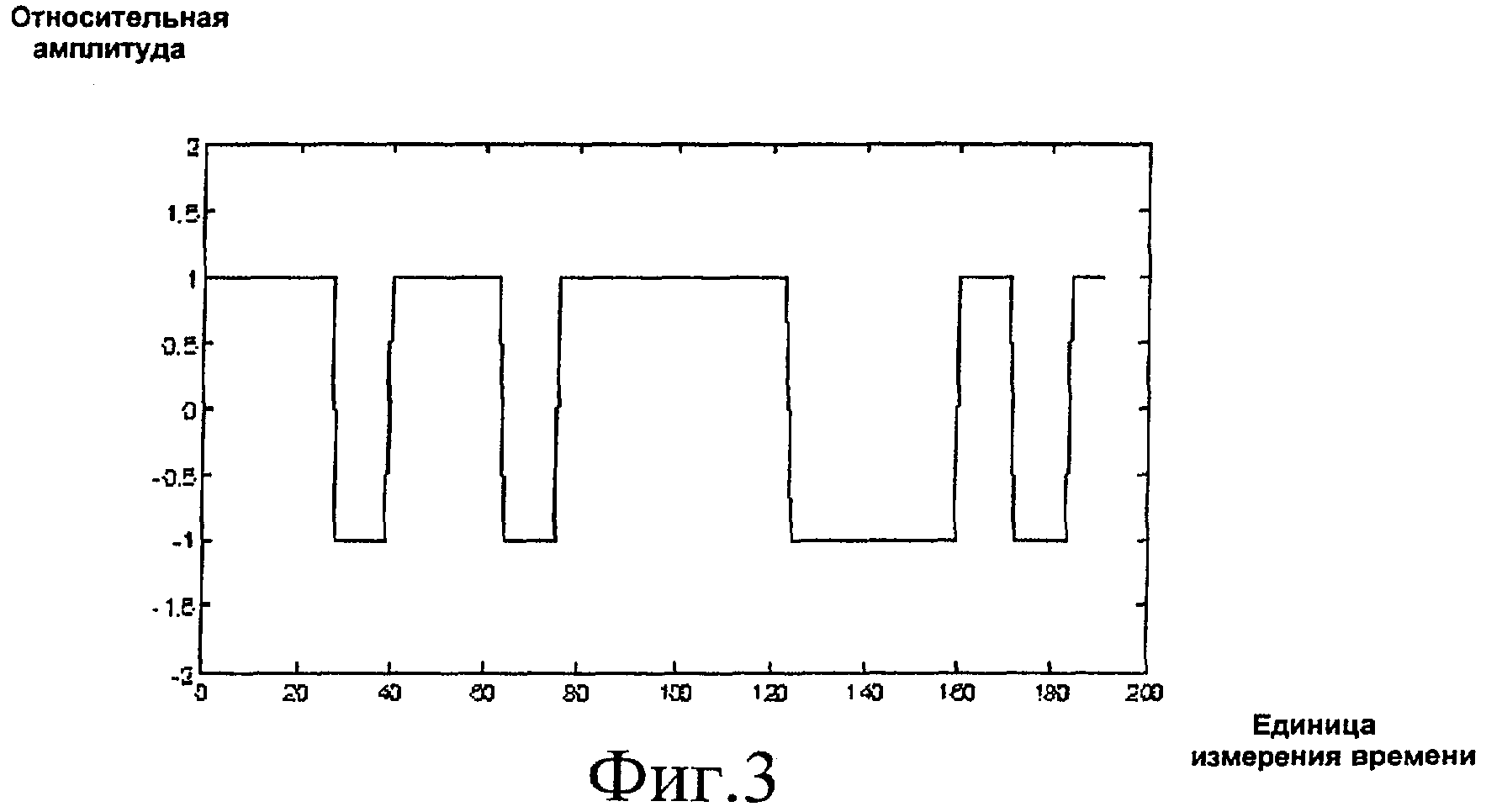
Фиг.3 иллюстрирует часть кодовой последовательности, которую посылают в каждый передатчик от центрального процессора,
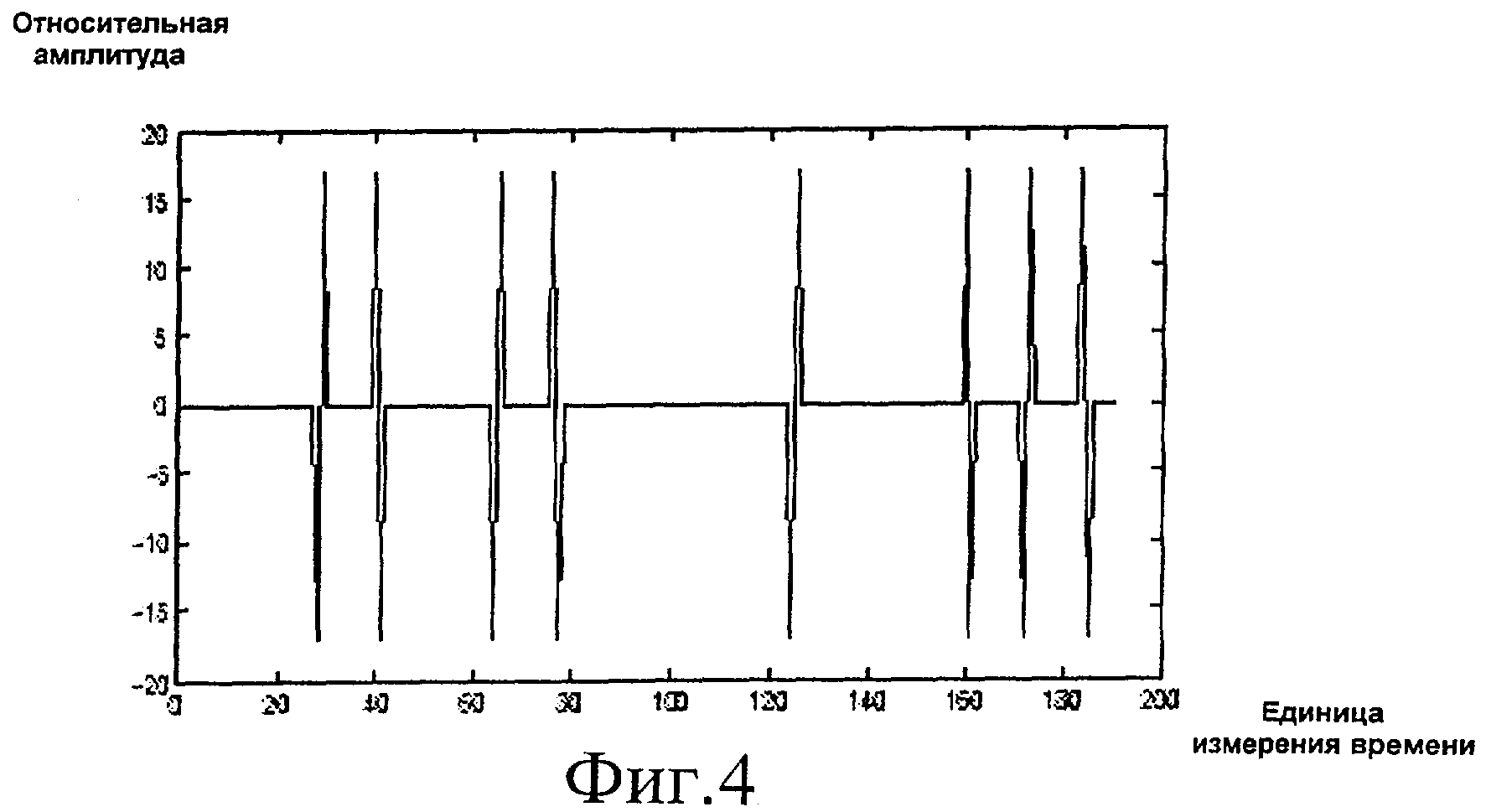
Фиг.4 показывает часть радиолокационного сигнала, переданного от каждого из передатчиков, основываясь на кодовой последовательности в соответствии с Фиг.3,
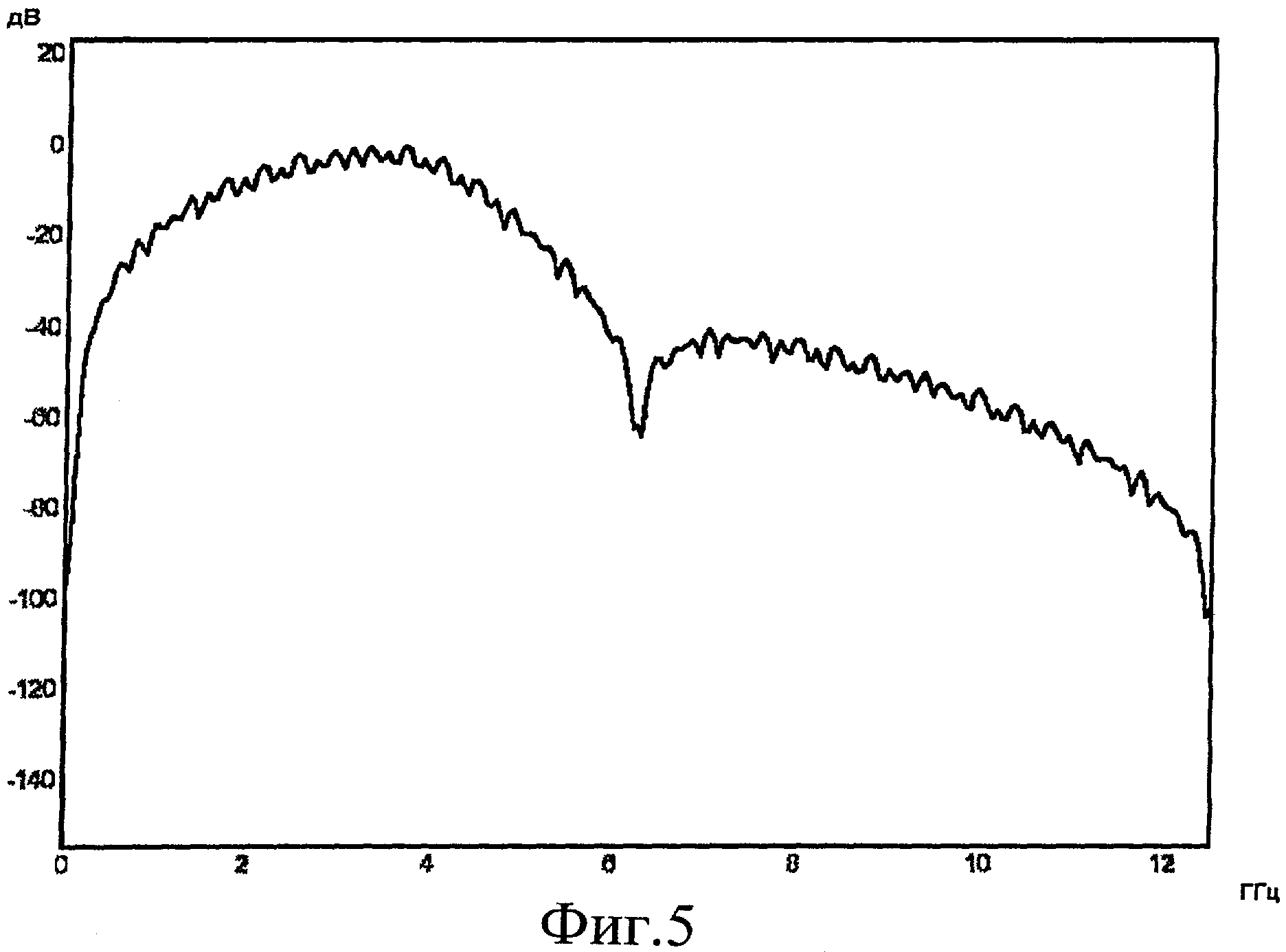
Фиг.5 показывает спектральное распределение радиолокационного сигнала, который формируется, когда передана кодовая последовательность в соответствии с Фиг.3,
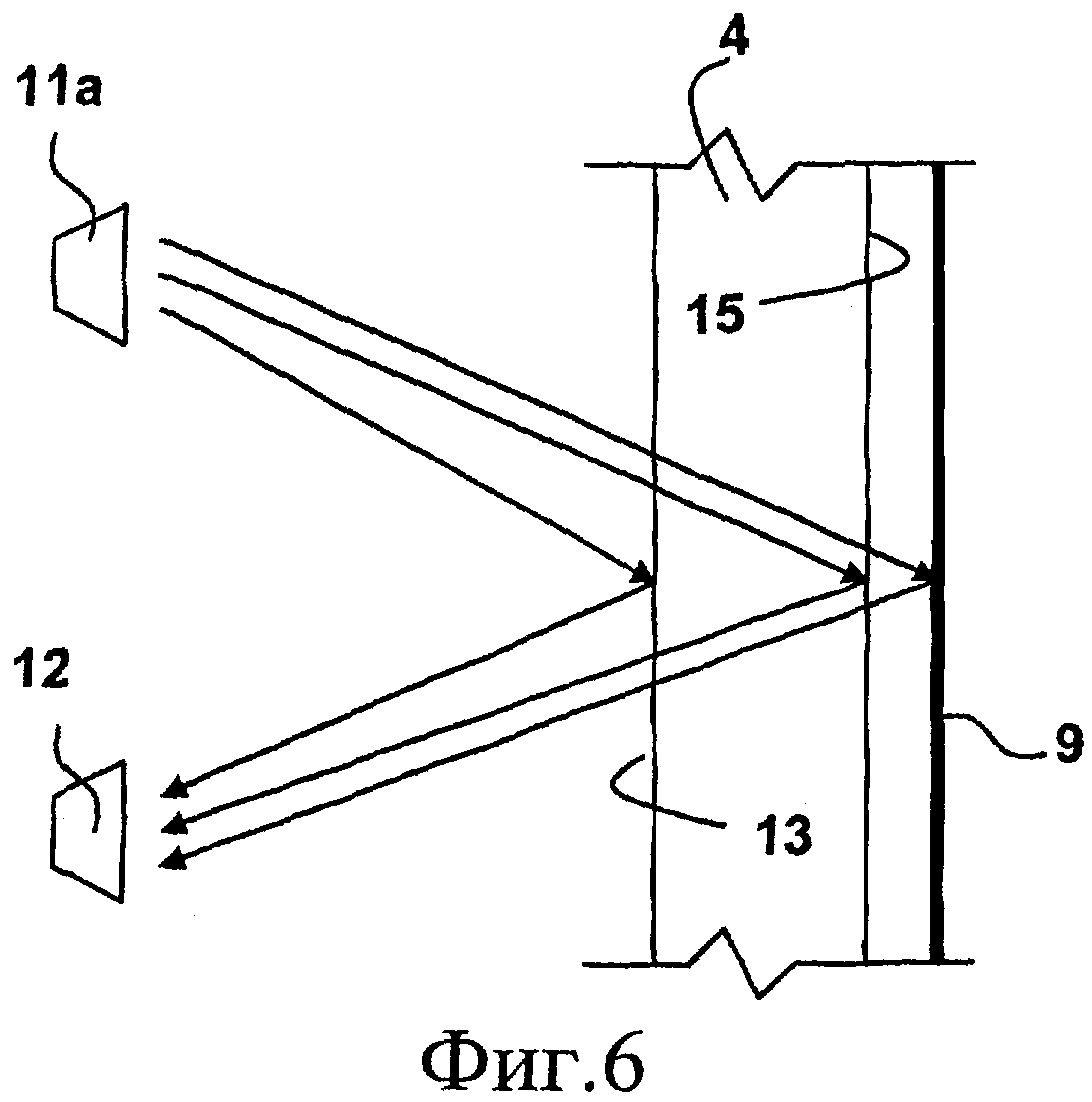
Фиг.6 представляет собой схематическую иллюстрацию, которая показывает, что отраженные радиолокационные сигналы генерируются в точках отражения, состоящих из диэлектрических ступенек, когда переданные радиолокационные сигналы, соответственно, проходят в объекты и из них,
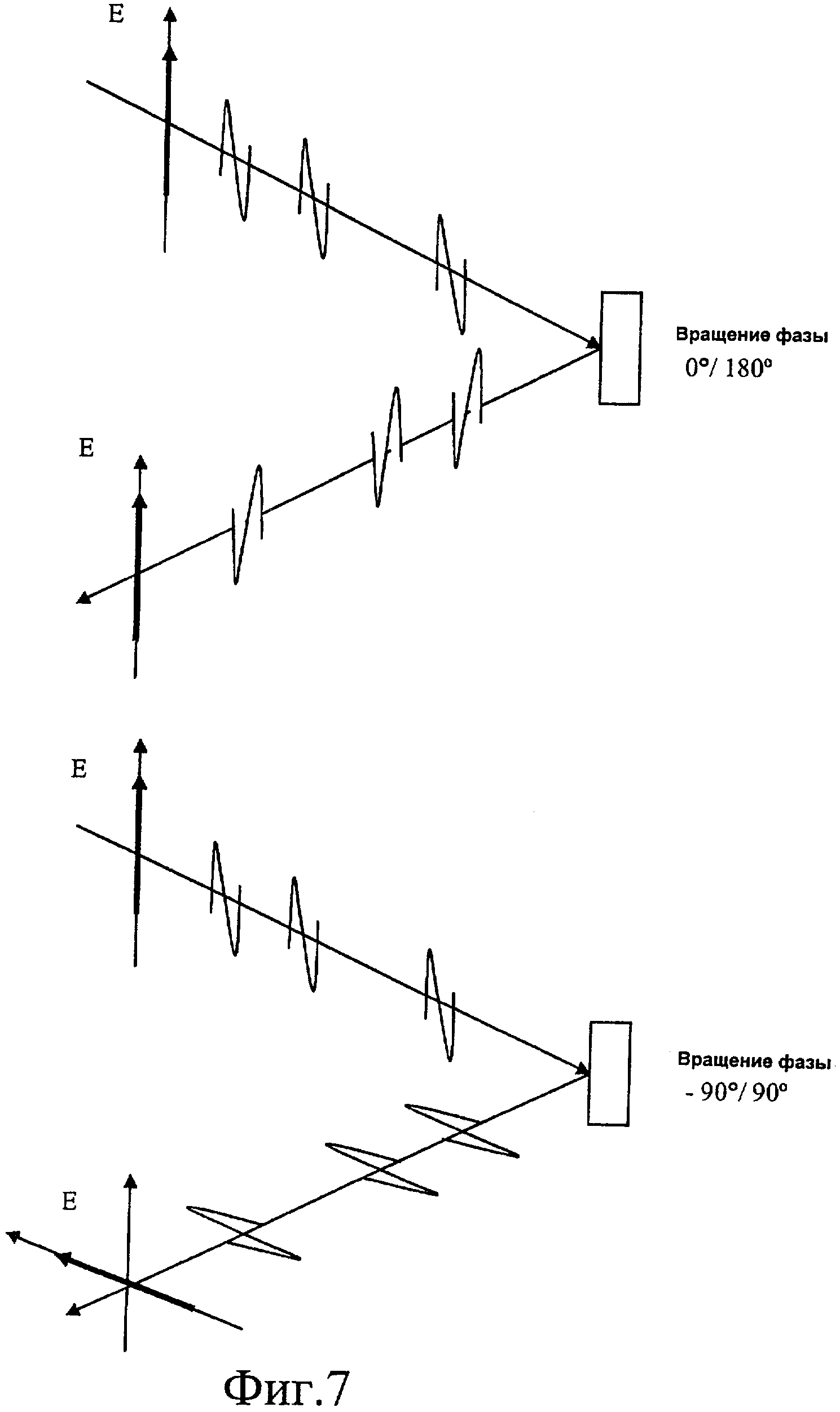
Фиг.7 показывает, как на поляризацию радиолокационных сигналов влияет отражение от поверхностей объекта,
Фиг.8 показывает представление отраженного радиолокационного сигнала, полученного приемником,
Фиг.9 показывает представление интерпретации полученного приемником отраженного радиолокационного сигнала, проиллюстрированного на Фиг.8,
Фиг.10 показывает нулевое дифференциальное обнаружение в форме шума, распределенного равномерно в течение времени, который получен, когда никакого перемещения не было обнаружено, и
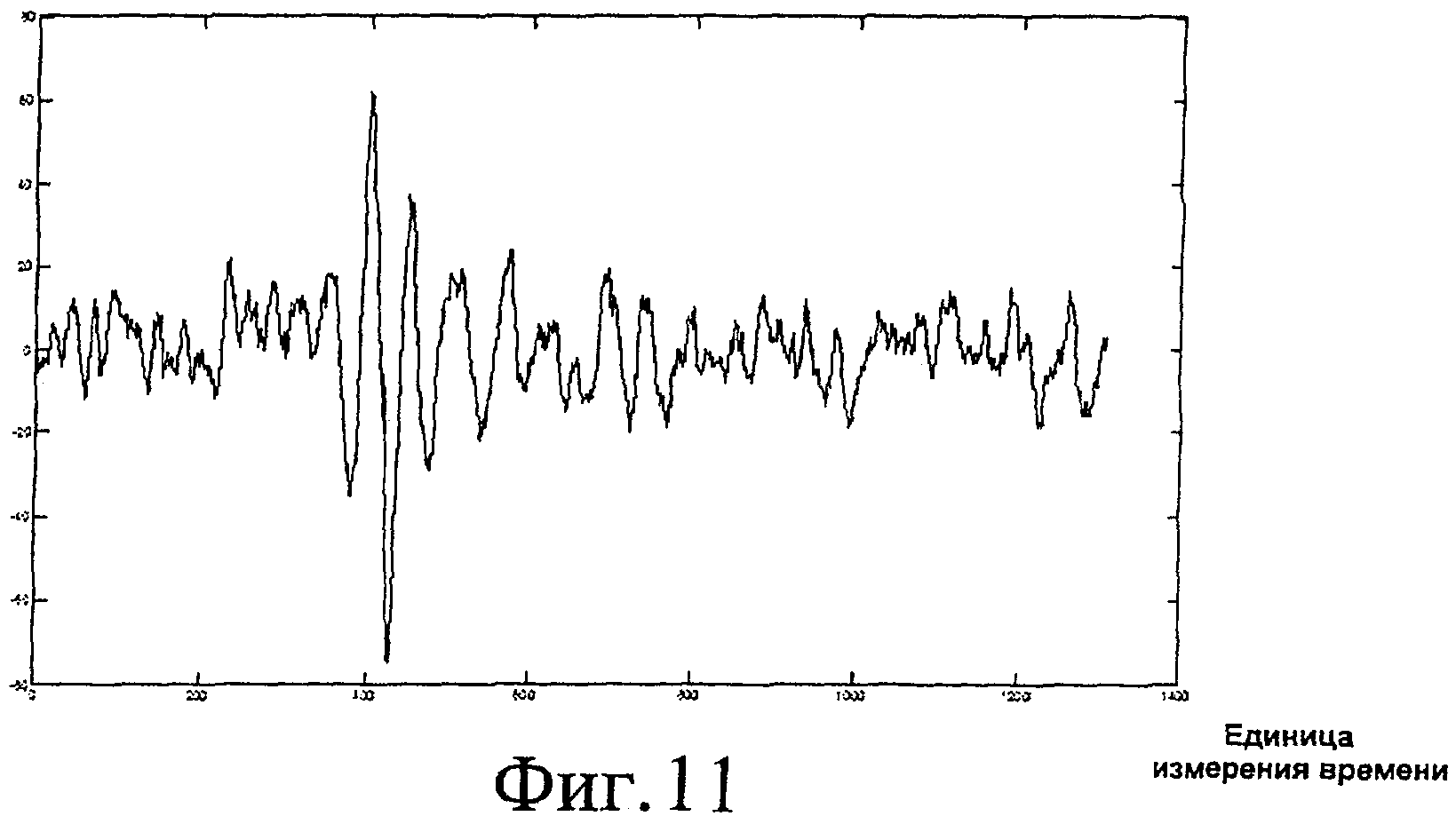
Фиг.11 показывает дифференциальное обнаружение, которое получено, когда было обнаружено перемещение поверхности объекта, мониторинг которого осуществляется.
Подробное описание предпочтительных вариантов выполнения
На Фиг.1 проиллюстрировано схематическое представление устройства обнаружения, выполненного в соответствии с изобретением, в целом обозначенного номером 1 позиции, которое расположено рядом с пространством 2, которое, например, представляет собой индустриальную печь. Пространство 2 содержит ограничивающую его оболочку и, если смотреть со стороны устройства 1 обнаружения, оболочка в изображенном варианте выполнения состоит из передней стенки 3, задней стенки 4, первой и второй боковых стенок 5, 6, верхней части 7 (см. Фиг.2), и пола 8 (см. Фиг.2). В случае печи оболочка предпочтительно состоит из огнеупорных кирпичей, которые снаружи покрыты металлическими листами 9.
Устройство 1 обнаружения в соответствии с предпочтительным вариантом выполнения содержит центральный процессор 10, по меньшей мере три передатчика 11а-с и приемник 12. Эти три передатчика 11а-с и приемник 12 функционально соединены с центральным блоком 10. Следует отметить, что центральный блок 10 также может содержать автономный компьютер (не показан), функционально соединенный с другими частями устройства 1 обнаружения для хранения и обработки информации. Устройство 1 обнаружения представляет собой предпочтительно оборудование на основе сверхширокополосной (UWB) радиолокационной технологии и предназначено для обнаружения перемещения на поверхности объекта, который в показанном иллюстративном варианте выполнения состоит из вышеупомянутой оболочки, имеет относительную диэлектрическую проницаемость εr, большую чем 1,1, и может считаться неподвижным во время процесса обнаружения, то есть в течение времени, когда осуществляется измерение. Это влечет за собой то, что возможное естественное перемещение объекта, мониторинг которого осуществляется, является настолько небольшим, что не может быть обнаружено в течение времени, когда выполняется процесс обнаружения, чтобы решить, что произошло обнаруженное перемещение поверхности объекта. В следующем примере время для процесса обнаружения оценивается равным 30 секунд, что, в свою очередь, ограничивает скорость естественного перемещения объекта 10 мкм/с.
В показанном иллюстративном варианте выполнения объект, в соответствии с изобретением, состоит из передней стенки 3, задней стенки 4, первой и второй боковых стенок соответственно 5, 6, верхней части 7 и пола 8, при этом поверхности, мониторинг которых осуществляется, являются поверхности, которые обращены вовнутрь к пространству 2. Если стенка прогибается, то и задняя поверхность, обращенная от пространства 2, вероятно также будет перемещаться. Однако следует отметить, что объект может, по меньшей мере во время измерения, быть неподвижным и расположенным отдельно стоящим в указанном пространстве 2.
В дальнейшем предполагается, что объект состоит из задней стенки 4, а поверхность объекта состоит из поверхности 13 задней стенки 4, обращенной внутрь к пространству 2. Устройство 1 обнаружения расположено на противоположной стороне передней стенки 3 относительно объекта 4. Большое количество отверстий 14 выполнено утопленными в металлическом листе 9, при этом все передатчики 11а-с и приемники 12 размещены в отверстиях 14, так что радиолокационные сигналы могут распространяться соответственно в пространство 2 и из него. Следует отметить, что один передатчик 11а и приемник 12 может быть расположен в одном и том же отверстии 14, что имеет место на Фиг.2, на котором каждое из двух пунктирных колец иллюстрируют передатчик 11b-с, а третье пунктирное кольцо иллюстрирует объединенный передатчик 11а и приемник 12. Следует отметить, что каждое пунктирное кольцо может состоять из узлов, которые содержат объединенный передатчик и приемник. Для получения однозначно определенного местоположения точки отражения посредством трех расстояний, каждое из которых находится между двумя известными положениями (11а-с, 12) по меньшей мере через одну точку отражения и принадлежит трем взаимно разделенным наборам двух известных положений, важно, чтобы передатчики 11а-с и приемник 12 не были расположены вдоль одной прямой линии, вместо этого взаимное расположение передатчиков 11а-с и приемника 12 может, например, образовывать треугольник.
Первый этап заключается в создании модели данных пространства 2 и объекта 4. Это может, например, быть осуществлено путем лазерного сканирования пространства или программированием пространства, основываясь на чертежах, после чего модель данных сохраняется в центральном блоке 10.
В центральном процессоре 10 устройства 1 обнаружения генерируется последовательность двоичного кода, которая имеет однозначный корреляционный результат, причем часть этой последовательности кода проиллюстрирована на Фиг.3, длина которой определяет коэффициент усиления системы устройства 1 обнаружения. Коэффициент усиления системы зависит от длины кодовой последовательности, при этом более длинная кодовая последовательность дает более высокий коэффициент усиления системы. Это отношение является линейным, так что удвоение длины кодовой последовательности приводит к удвоению коэффициента усиления системы.
Однако одновременно с этим при длинной кодовой последовательности время,' которое необходимо для передачи и принятия кодовой последовательности, увеличивается, что устанавливает верхний предел на длину кодовых последовательностей, которые подходят для использования. Например, длина кодовой последовательности может составить 640 или 1280 битов.
Кодовая последовательность непрерывно повторяется и подается, например, посредством стекловолоконной связи к передатчикам 11а-с. Выбор стекловолоконной оптики мотивирован тем фактом, что кодовая последовательность не должна быть искажена или прервана на пути между центральным блоком 10 и передатчиками 11а-с.
Передатчики 11а-с передают радиолокационный сигнал, включающий короткий радиолокационный пульс, вызванный изменением амплитуды кодовой последовательности при переходе от одного состояния в другое (см. Фиг.4). Например, радиолокационные импульсы в электрическом поле передатчиков 11а-с могут быть связаны со второй производной кодовой последовательности. Спектральное распределение радиолокационного сигнала, показанное на Фиг.5, управляется как скоростью передачи битов кодовой последовательности, так и структурой последовательности двоичного кода. При этом спектральное распределение радиолокационного сигнала сформировано так, что оно соответствует так называемой частотной маске, опубликованной ETSI (Европейский Телекоммуникационный Институт Стандартов), то есть набору допустимых передающих мощностей на различных частотах. Радиолокационный сигнал является мультиплексным сигналом с разделением времени, т.е. каждому передатчику 11а-с назначено временное окно для его соответствующей передачи, благодаря тому факту, что кодовая последовательность передается большое количество раз в течение 10 секунд или 65 миллиардов битов от первого передатчика 11а. Затем включается второй передатчик и передача повторяется. Затем включается третий передатчик и передача повторяется снова, что завершает процесс обнаружения, а затем снова активируется первый передатчик 11а.
Волновой фронт радиолокационного сигнала распространяется в пространстве 2 и через объект 4, при этом часть радиолокационного сигнала отражается соответственно передней поверхностью 13 объекта 4, задней поверхностью 15 объекта 4 и металлическим листом 9 и распространяется назад к приемнику 12, такому как приемник, изображенный на Фиг.6. Радиолокационный сигнал отражается в двух случаях: когда относительная диэлектрическая проницаемость ε среды, в которой проходит радиолокационный сигнал, резко изменяется, и когда волновой фронт достигает металлической поверхности. В случае, когда отражение зависит от резких изменений диэлектрических свойств среды, например, когда переданный радиолокационный сигнал проходит соответственно в объект 4 и из него, направление поляризации волны радиолокационного сигнала может вращаться, при этом отраженная волна радиолокационного сигнала получает поляризацию, которая отклоняется от поляризации падающей волны радиолокационного сигнала. Вращение зависит, например, от расположения геометрии и/или материальных свойств среды и не может, поэтому, быть предсказано, а должно расцениваться как более или менее случайное. Когда имеет место отражение от металлической поверхности, такой как металлический лист 9, вращение направления поляризации волны радиолокационного сигнала будет более однозначно, однако также и в этом случае оно может несколько изменяться, завися, например, от свойств, геометрии и поверхностной структуры металлической поверхности. Это означает, что приемник 12 должен быть в состоянии оперировать с отраженными радиолокационными сигналами независимо от направления поляризации отраженного радиолокационного сигнала. Следовательно, приемник 12 имеет круговую поляризацию, чтобы захватить отраженные радиолокационные сигналы на полном уровне сигнала, независимо от поляризации отраженного радиолокационного сигнала. Одновременно приемник 12 выполнен для оперирования с радиолокационными сигналами, поляризация которых изменяется от 0 градусов до 180 градусов, в зависимости от устройства 1 обнаружения, причем в этом отношении не является однозначным (см. Фиг.7).
Линии передачи от приемника 12 к центральному блоку 10 предпочтительно должны иметь большую полосу пропускания для того, чтобы не искажать волновой фронт радиолокационного сигнала. Предпочтительно, для передачи между приемником 12 и центральным блоком 10 используются широкополосные волоконно-оптические линии.
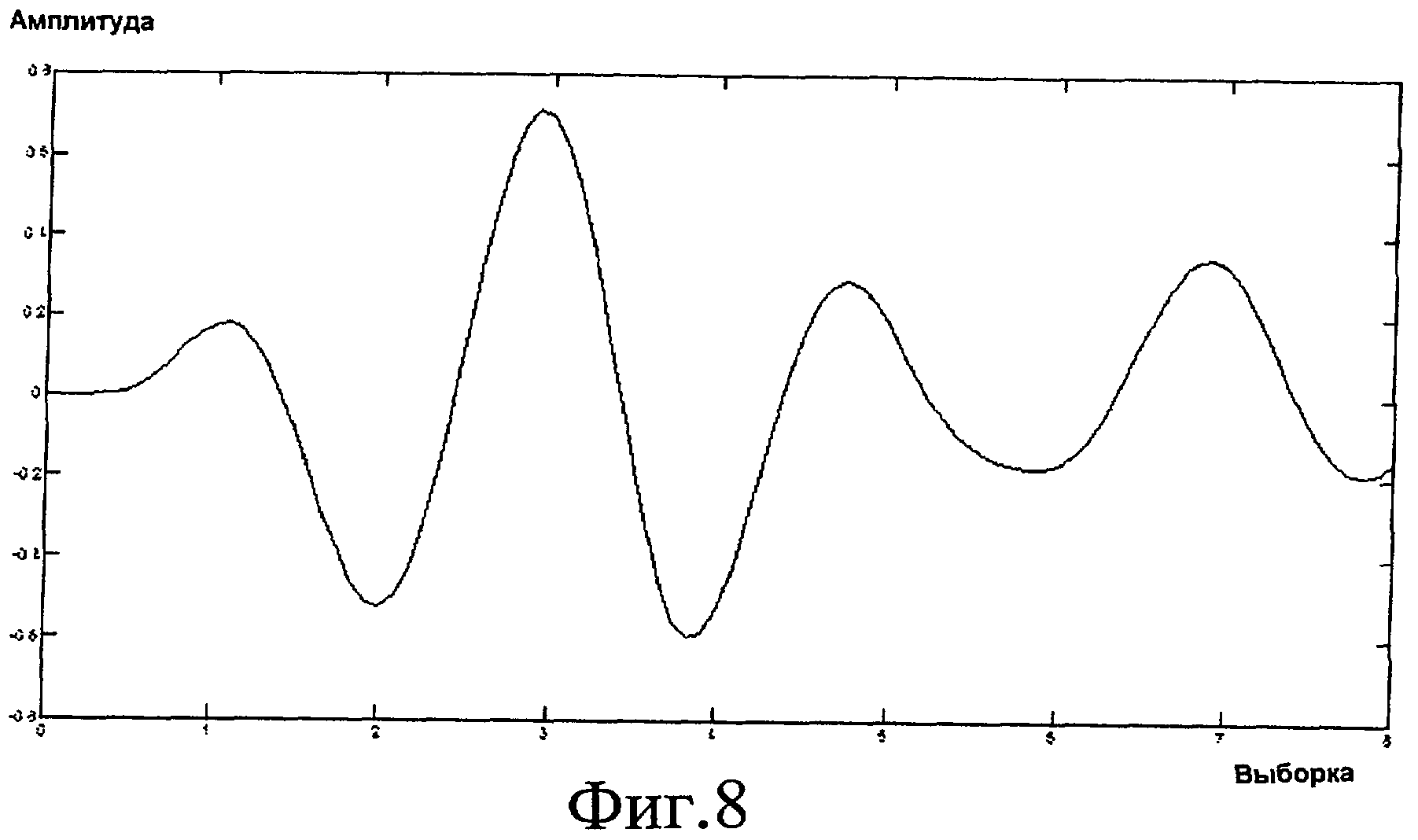
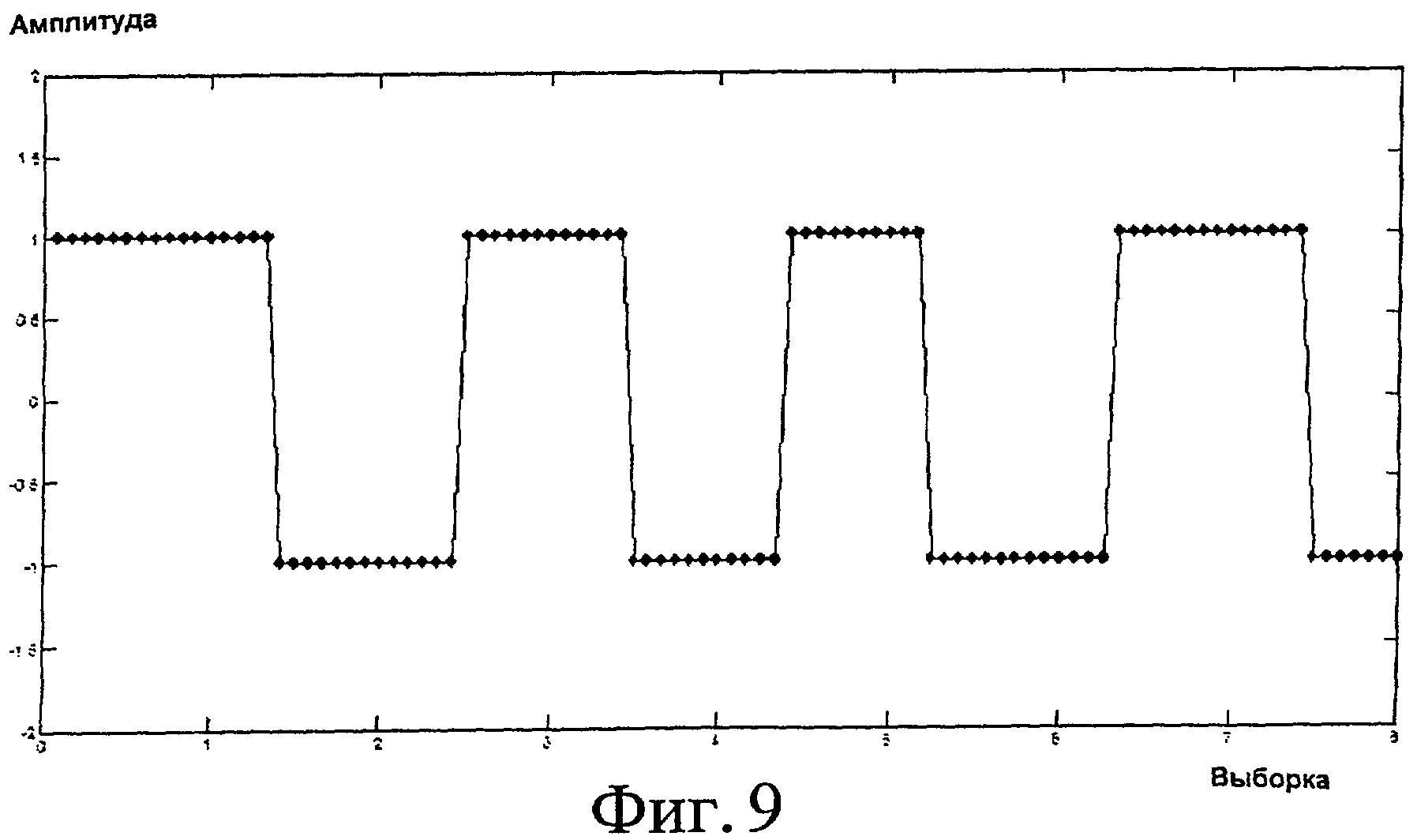
В центральном блоке 10 переданный радиолокационный сигнал сравнивается с принятым отраженным радиолокационным сигналом или, другими словами, структура/вид переданной кодовой последовательности сравнивается со структурой/видом интерпретации принятого отраженного радиолокационного сигнала. Коррелятор является симметричным, что также означает, что выполняется сравнение комплементарного радиолокационного сигнала, чтобы получить более однозначный корреляционный результат. На Фиг.8 показан отраженный радиолокационный сигнал, полученный приемником 12. На Фиг.9 показана интерпретация приемником 12 отраженного радиолокационного сигнала, изображенного на Фиг.8.
Коррелятор (не показан), содержащийся в устройстве 1 обнаружения, сравнивает все биты переданной кодовой последовательности с соответствующими частями интерпретации полученного отраженного радиолокационного сигнала, и сообщает посредством корреляционного результата, сколько битов согласовано друг с другом. Результат нормирован, поэтому каждый результат сравнения является числом, лежащим в интервале от -1 до +1. Результаты около -1 или +1 указывают на хорошее совпадение между переданным радиолокационным сигналом и полученным отраженным радиолокационным сигналом, причем значение всех сравнений с по меньшей мере конкретным совпадением суммируются для формирования точки в корреляционном результате. Затем переданная кодовая последовательность и интерпретации полученного отраженного радиолокационного сигнала перемещаются друг относительно друга на заранее заданное расстояние, например на один бит, или, например, шагами по 1/12 бит, чтобы получить более гладкие переходы и более высокую точность корреляционного результата. Таким образом, операция предпочтительно повторяется для всех битов с так называемой 12-битовой избыточной дискретизацией до тех пор, пока циклическая кодовая последовательность не сдвинется на «полный оборот». Время, прошедшее до момента, который отмечен пиком в корреляционном результате, соответствует времени, прошедшему от передачи радиолокационного сигнала до приема радиолокационного сигнала, который был отражен точкой отражения.
Благодаря коррелятору обеспечивается сравнение временного интервала от 0 до 100 нс. В свободном пространстве это соответствует радиолокационному расстоянию от 0 до 15 м, которое равно расстоянию между передатчиком 11а-с и приемником 12 через точку отражения. В настоящем варианте выполнения точность радиолокационного расстояния для отдельных точек отражения объекта в свободном пространстве составит приблизительно 4 мм, а разрешение между двумя различными точками отражения будет равно приблизительно 92 мм в свободном пространстве. Другими словами, точки отражения, которые ближе друг к другу чем 92 мм по прямой от приемника 12, не будут с достоверностью различаться друг от друга. Однако следует отметить, что, поскольку разрешение между двумя точками отражения подразумевает, что радиолокационный сигнал распространяется через диэлектрический материал, разрешение улучшается на 1/(εr)1/2. Отношение 1/(εr)1/2 является мерой того, насколько уменьшена скорость радиолокационного сигнала, когда он распространяется через диэлектрический материал. Например, для определенного типа кирпичей, имеющих относительную диэлектрическую проницаемость εr=3,5, разрешение между двумя точками отражения составляет приблизительно 50 мм. Передавая радиолокационный сигнал по меньшей мере из трех положений передатчика и объединяя установленные радиолокационные расстояния от соответствующего положения передатчика, трехмерная радиолокационная модель может описать пространство 2, мониторинг которого осуществляется, то есть каждая точка отражения однозначно определяется посредством трех расстояний, каждое из которых вычисляется между двумя известными положениями (11а-с, 12) через указанную точку отражения, причем эти расстояния принадлежат трем взаимно отдельным наборам двух известных положений.
Если производственный процесс, осуществляемый в пространстве 2, выполняется непрерывно, устройство 1 обнаружения имеет доступ к базовой радиолокационной модели, которая описывает состояние в пространстве 2, которое принимается за стандартное. Базовая радиолокационная модель состоит из «усредненного результата» множества корреляционных результатов. Если в радиолокационной модели возникает изменение, последняя стандартная базовая радиолокационная модель сохраняется, при этом выполняется дифференциальный анализ посредством дифференциального датчика (не показан), содержащемся в устройстве 1 обнаружения. Таким образом, цель дифференциального анализа состоит в том, чтобы сравнить множество корреляционных результатов, полученных в течение продолжительного времени, чтобы быть в состоянии обнаружить отклонения. Указанный дифференциальный анализ напоминает фильтрование помех, используя обзорный радиолокатор.
В стандартном состоянии, в котором не возникают никакие изменения корреляционного результата, дифференциальный датчик обеспечивает нулевое дифференциальное обнаружение в форме шума, равномерно распределенного во времени (см. Фиг.10). Однако, если произошло перемещение поверхности 13 объекта 4, дифференциальный датчик делает запись явного различия и обеспечивает дифференциальное обнаружение (см. Фиг.11). Такая разница может, например, возникнуть, когда часть поверхности 13 объекта 4 смещается вперед к устройству 1 обнаружения. Сильное колебание импульса от дифференциального датчика косвенно выявляет расстояние от передатчика 11а-с до приемника 12 через точку, где произошло событие, причем расстояние показано в секундах, при этом, зная скорость распространения радиолокационного сигнала в различных средах, это расстояние может быть определено. На Фиг.10 показано нулевое дифференциальное обнаружение, основанное на передаче от первого передатчика 11а, а на Фиг.11 изображено дифференциальное обнаружение, основанное на передаче от первого передатчика 11а.
Точное местоположение точки отражения идентифицируется путем перехода от дифференциального обнаружения, основанного на относительных положениях этих трех передатчиков 11а-с, к трехмерной радиолокационной модели, и помещается в трехмерную просканированную лазером модель данных объекта 4 и пространства 2, чтобы установить, что это именно объект 4, который переместился, а не что-то еще в пространстве 2.
Трехмерная радиолокационная модель от устройства 1 обнаружения должна быть подкорректирована посредством заранее установленных калибровочных данных, чтобы вписаться в просканированную лазером модель данных пространства 2. Это происходит благодаря радиолокационному сигналу, распространяющемуся через материалы, имеющие различные диэлектрические свойства и, таким образом, распространяющемуся с различными скоростями. Путем выполнения коррекции трехмерная радиолокационная модель и просканированная лазером модель данных пространства могут быть приведены в соответствие. На Фиг.2 изображены пространство 2, мониторинг которого осуществляется, так же как и перемещение, которое произошло. В этом случае была промоделирована деформированная часть задней стенки 4. На чертеже также показано размещение этих трех передатчиков 11а-с и приемника 12 позади передней стенки 3.
Устройство 1 обнаружения обеспечивает возможность осуществления непрерывного мониторинга пространства 2 и запуск автоматической тревоги, если перемещение обнаружено. Желательные перемещения и изменения в других местах пространства, например местах перемещения продуктов, обрабатываемых в пространстве, могут на основании их обнаруженных положений быть экранированы или, если требуется, быть сигналом, обработанным в отдельном процессе.
Выполнимые модификации изобретения
Изобретение не ограничено только вариантами выполнения, описанными выше и показанными на чертежах. Таким образом, устройство обнаружения и процесс обнаружения могут быть изменены всеми выполнимыми способами, которые попадают в объем приведенной ниже формулы изобретения.
Следует отметить, что, вместо того, чтобы использовать три передатчика и один приемник, могут быть использованы три приемника и один передатчик, чтобы достигнуть того же самого результата, а именно по меньшей мере три расстояния, каждое из которых определяется между двумя известными положениями по меньшей мере через одну точку отражения, принадлежа трем взаимно отделенным наборам двух известных положений. Кроме того, могут быть использованы два приемника и два передатчика. В предпочтительном варианте выполнения могут быть использованы три передатчика и три приемника, которые расположены в парах, содержащих один передатчик и один приемник. Каждая пара установлена в отверстии, выполненном в металлическом листе, после чего могут быть получены шесть расстояний, каждое между двумя известными положениями через точки отражения, что увеличивает точность устройства обнаружения.
Реферат
Изобретение относится к средствам обнаружения перемещения поверхности объекта. Техническим результатом является повышение точности обнаружения поверхности объекта. В способе создают модели данных объекта, сохраняют в центральном процессоре устройства обнаружения, передают радиолокационные сигналы, получают отраженные сигналы, созданные в точках отражения, сравнивают полученные сигналы с переданными для получения результатов, сообщающих о расстоянии между двумя положениями, выполняют дифференциальный анализ результатов, для обнаружения перемещения точки отражения поверхности, определяют местоположение перемещенной точки отражения, создают радиолокационную модель перемещения поверхности объекта и визуализируют радиолокационную модель. 2 н. и 6 з.п. ф-лы, 11 ил.
Формула
a) создания модели данных объекта (4) и указанного пространства (2), причем указанную модель данных сохраняют в центральном процессоре (10), содержащемся в устройстве (1) обнаружения,
b) передачи радиолокационных сигналов в форме радиолокационных импульсов, частотные компоненты которых распределены в пределах частотного диапазона от 30 МГц до 12,4 ГГц,
c) получения отраженных радиолокационных сигналов, созданных в точках отражения, состоящих из диэлектрических ступеней, когда радиолокационные сигналы проходят, соответственно, в объект (4) и из объекта,
d) сравнения полученных отраженных радиолокационных сигналов с переданными радиолокационными сигналами для получения корреляционных результатов, каждый из которых сообщает о расстоянии между двумя известными положениями (11а-с, 12) через указанные точки отражения,
e) выполнения дифференциального анализа различных корреляционных результатов, полученных в течение времени, чтобы обнаружить перемещение конкретной точки отражения поверхности (13),
f) однозначного определения местоположения конкретной перемещенной точки отражения посредством дифференциального анализа различных корреляционных результатов, принадлежащих по меньшей мере трем взаимно отделенным наборам двух известных положений (11а-с, 12),
g) создания радиолокационной модели перемещения поверхности (13) объекта (4) и визуализации радиолокационной модели в указанной модели данных.
Комментарии