Устройство сбора данных при помощи акустических волн - RU2571330C2
Код документа: RU2571330C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству сбора данных при помощи акустических волн.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
Обычные устройства ультразвуковой диагностики могут производить сбор информации внутри живого организма путем передачи ультразвуковых волн и приема ультразвуковых волн, отраженных внутри живого организма. Это позволяет обнаруживать больную часть тела, например, с наличием рака. Кроме того, привлекает внимание получение изображений физиологической информации, то есть, функциональной информации, о живом организме для улучшения эффективности обнаружения. В качестве средства получения изображений функциональной информации была предложена фотоакустическая томография (PAT), в которой используют световые и ультразвуковые волны.
Фотоакустическая томография представляет собой технологию получения изображений внутренней ткани, которая служит в качестве источника акустических волн, с использованием фотоакустического эффекта, при котором происходит генерация акустических волн (обычно ультразвуковых волн) за счет применения импульсного света, сгенерированного источником света, к объекту и за счет поглощения света, распространившегося и рассеявшегося в объекте. Изменения принятых акустических волн с течением времени регистрируют во множестве мест, и полученные сигналы подвергают математическому анализу, то есть, реконструкции, и производят трехмерную визуализацию информации об оптических характеристических значениях внутри объекта.
Разрешающая способность трехмерного изображения, полученного с использованием фотоакустической томографии, зависит от приведенных ниже факторов, которые зависят от схемы размещения акустических регистрирующих элементов. Если множество акустических регистрирующих элементов размещено на плоской поверхности, то разрешающая способность в направлении, параллельном плоской поверхности размещения, (разрешающая способность по плоскости) зависит как от размеров приемных участков отдельных акустических регистрирующих элементов, так и от частот, которые могут регистрировать акустические регистрирующие элементы, а разрешающая способность в направлении, перпендикулярном плоской поверхности размещения, (разрешающая способность по глубине) зависит только от частот, которые могут регистрировать акустические регистрирующие элементы. Разрешающая способность в направлении, перпендикулярном плоской поверхности размещения, является более высокой, чем разрешающая способность в направлении, параллельном этой плоскости, поскольку обычно легче увеличить частоты, которые могут быть зарегистрированы акустическими регистрирующими элементами, чем уменьшить размер приемных участков. В том случае, когда множество акустических регистрирующих элементов размещено на сферической поверхности, имеет место наложение информации в направлении по глубине во всех акустических регистрирующих элементах, и, следовательно, разрешающая способность по плоскости также равна разрешающей способности по глубине. То есть, поскольку разрешающая способность во всех направлениях зависит только от частот, то эта схема размещения обеспечивает высокую разрешающую способность. При промежуточной схеме размещения между размещением на плоскости и размещением на сфере, в которой множество акустических регистрирующих элементов расположены на множестве предусмотренных для этого плоских поверхностей под различными углами, разрешающая способность в меньшей степени зависит от размеров участков приема акустических регистрирующих элементов, поскольку схема размещение приближается от схемы размещения на плоскости к схеме размещения на сфере, что, следовательно, позволяет добиться более высокой разрешающей способности.
Пример устройства, в котором множество акустических регистрирующих элементов размещены на сферической поверхности, раскрыт в патентной литературе 1. В патентной литературе 1 акустические регистрирующие элементы размещены в виде спиральной структуры на полусферической поверхности, а облучение светом и прием акустических волн с использованием акустических регистрирующих элементов выполняют во время вращения полусферы вокруг линии, соединяющей полюса полусферы и центр сферы. Выполняют восстановление изображения для получения данных изображения с использованием выходных сигналов из акустических регистрирующих элементов, принявших акустические волны.
СПИСОК ЛИТЕРАТУРЫ
Патентная литература 1: патент США № 5,713,356
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
Однако, при размещении акустических регистрирующих элементов на сфере, раскрытом в патентной литературе 1, разрешающая способность является самой высокой в центре сферы и уменьшается с уменьшением расстояния до периферии, что приводит к переменной разрешающей способности. Другими словами, поскольку акустические волны падают на все акустические регистрирующие элементы в центре под прямым углом, вследствие чего сигналы с одинаковой фазой приходят в одно и то же время, то сигналы не ослабляются. Однако, в иных участках, чем центр, акустические волны падают на некоторые из акустических регистрирующих элементов по диагонали, вследствие чего сигналы с одинаковой фазой приходят с задержкой по времени. Таким образом, одной из причин переменной разрешающей способности является ослабление сигналов, кроме сигналов в центре.
Другой причиной является направленность акустических регистрирующих элементов. Направление прохождения акустических волн ориентировано под углом относительно акустических регистрирующих элементов, и акустические регистрирующие элементы имеют направленность. Таким образом, чувствительность уменьшается, когда направление прохождения ориентировано под углом, и пропадает, когда сигнал становится более слабым, чем уровень шума. Таким образом, разрешающая способность уменьшается при уменьшении объема информации. Для варианта размещения на плоской поверхности, когда акустические регистрирующие элементы размещены на плоской поверхности, которая является в достаточной степени более широкой, чем область измерений, в области измерений может быть достигнута равномерная разрешающая способность. Для промежуточной схемы размещения между размещением на плоскости и размещением на сфере, в которой предусмотрено множество плоских поверхностей, интервал равномерной разрешающей способности постепенно уменьшается по мере того, как схема размещения меняется от размещения на плоскости до размещения на сфере. Таким образом, высокая разрешающая способность и единообразие разрешающей способности имеют компромиссное соотношение.
Настоящее изобретение было создано с учетом признания наличия этой проблемы. Настоящее изобретение уменьшает изменения разрешающей способности в зависимости от местоположения.
РЕШЕНИЕ ЗАДАЧИ
Устройство сбора данных при помощи акустических волн согласно объекту настоящего изобретения оснащено детектором, включающим в себя множество регистрирующих элементов, которые принимают акустические волны от объекта, причем приемные поверхности, по меньшей мере, некоторых из регистрирующих элементов ориентированы под различными углами. Это устройство включает в себя блок сканирования, сконфигурированный для перемещения, по меньшей мере, одного из элементов, которыми являются объект и детектор, для изменения относительного положения объекта и области с самой высокой разрешающей способностью, определенной в зависимости от размещения регистрирующих элементов.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Настоящее изобретение может уменьшать изменения разрешающей способности в зависимости от местоположения по сравнению с известным уровнем техники.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
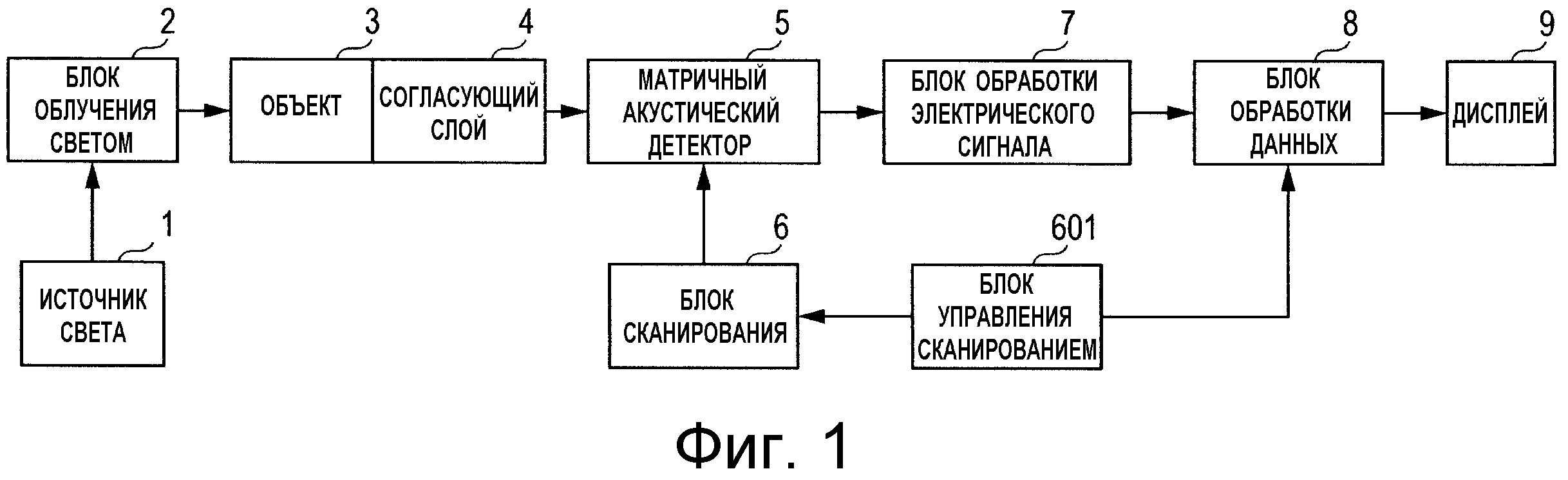
На Фиг. 1 изображена блок-схема, на которой показана конфигурация устройства согласно первому варианту осуществления настоящего изобретения.
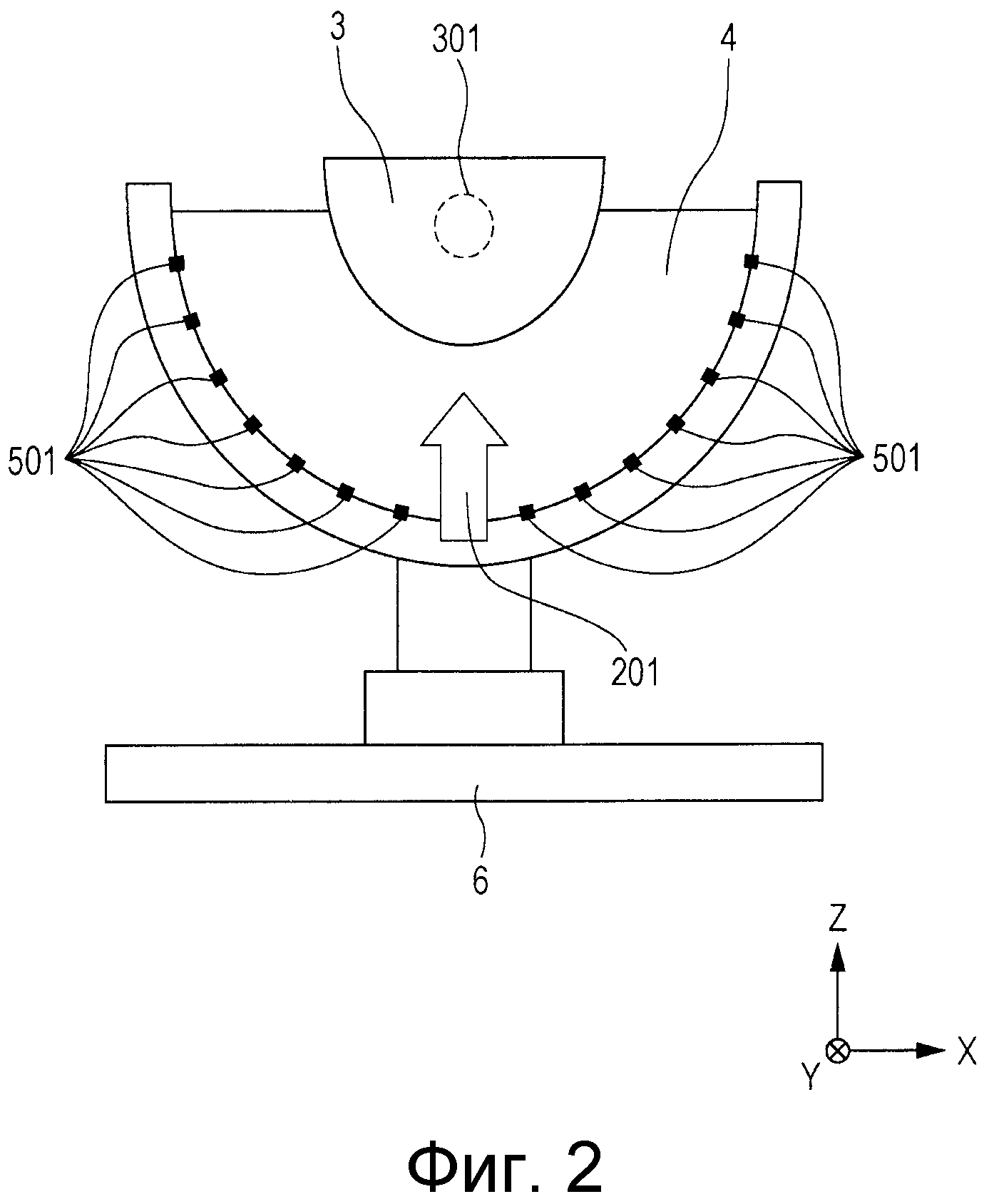
На Фиг. 2 изображена принципиальная схема, на которой проиллюстрировано устройство согласно первому варианту осуществления настоящего изобретения.
На Фиг. 3A изображена схема, на которой проиллюстрирован способ сканирования согласно первому варианту осуществления настоящего изобретения.
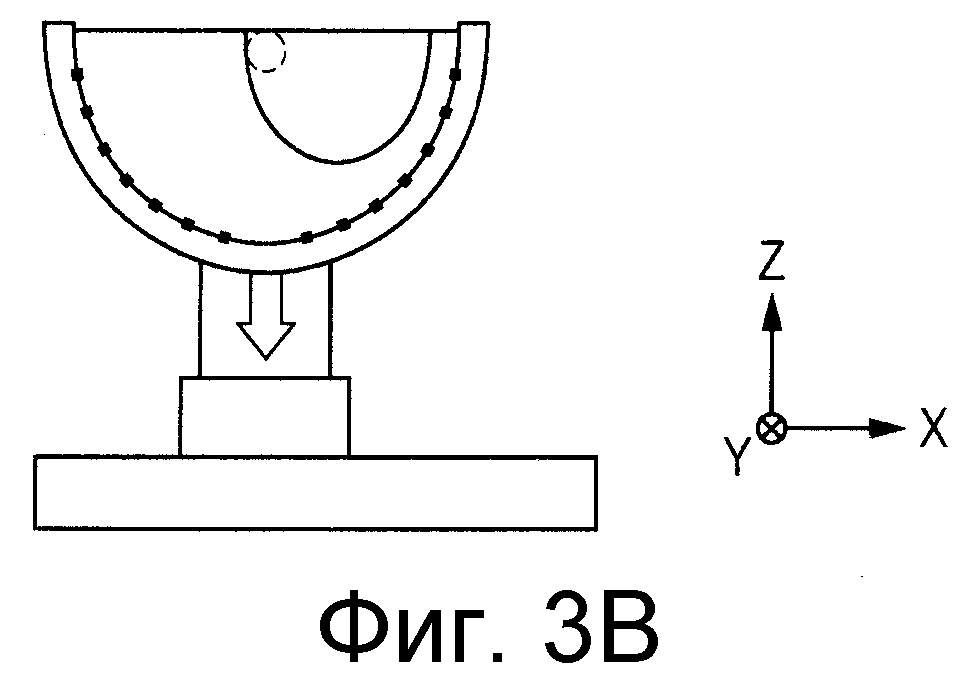
На Фиг. 3B изображена схема, на которой проиллюстрирован способ сканирования согласно первому варианту осуществления настоящего изобретения.
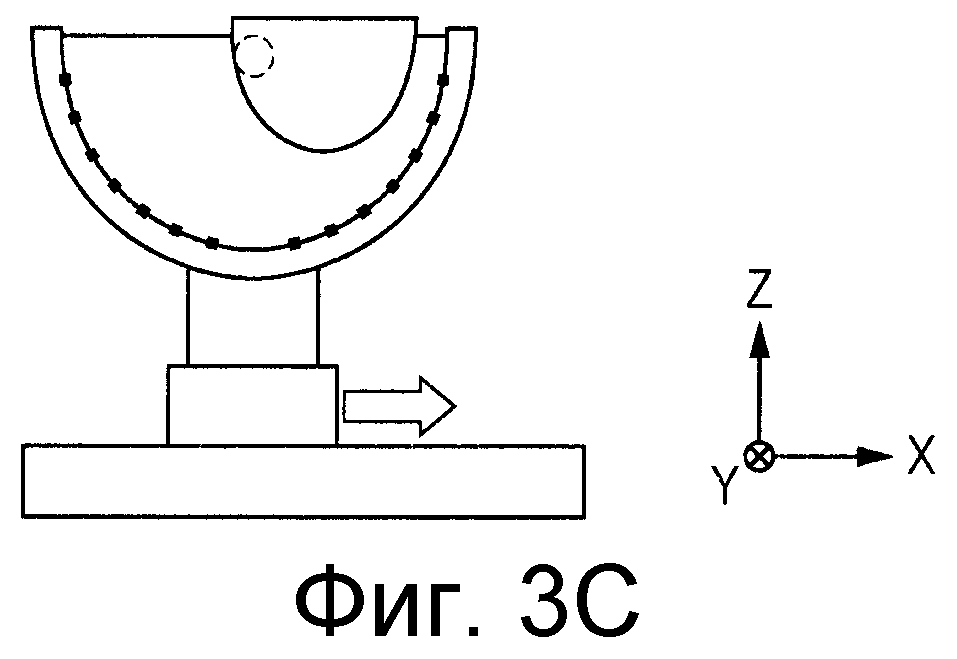
На Фиг. 3C изображена схема, на которой проиллюстрирован способ сканирования согласно первому варианту осуществления настоящего изобретения.
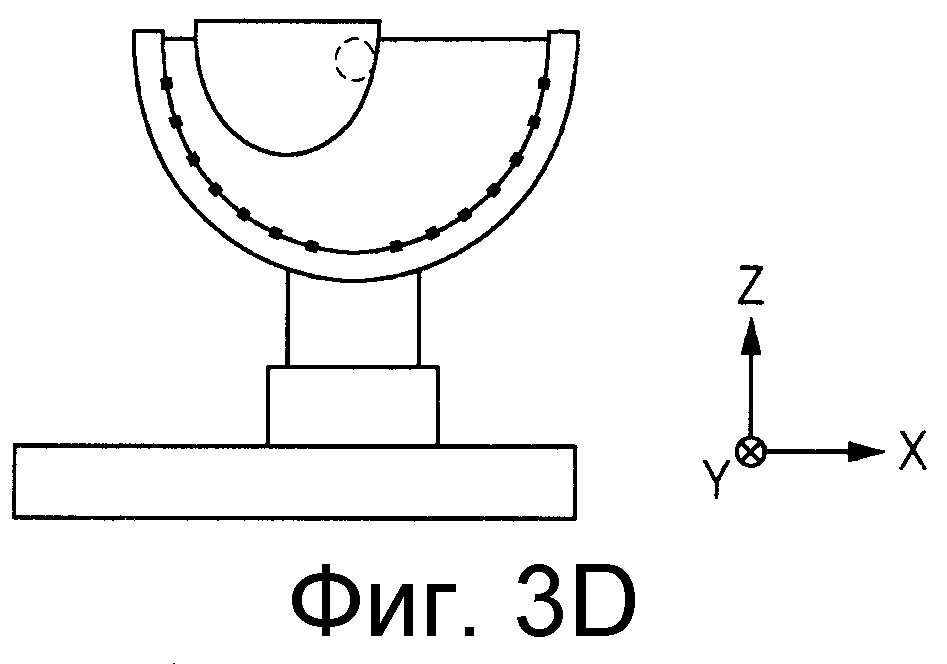
На Фиг. 3D изображена схема, на которой проиллюстрирован способ сканирования согласно первому варианту осуществления настоящего изобретения.
На Фиг. 4 изображена схема последовательности операций, на которой показано функционирование устройства согласно первому варианту осуществления настоящего изобретения.
На Фиг. 5A изображена концептуальная схема, на которой проиллюстрирован градиент разрешающей способности и эффект сканирования.
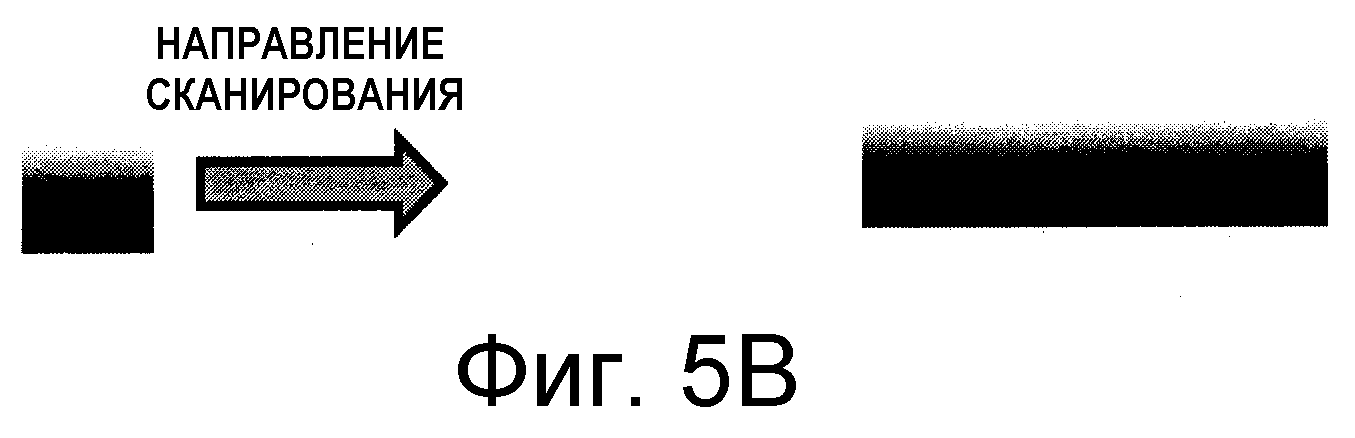
На Фиг. 5B изображена концептуальная схема, на которой проиллюстрирован градиент разрешающей способности и эффект сканирования.
На Фиг. 6A изображена схема, на которой проиллюстрирован видоизмененный вариант устройства согласно первому варианту осуществления настоящего изобретения.
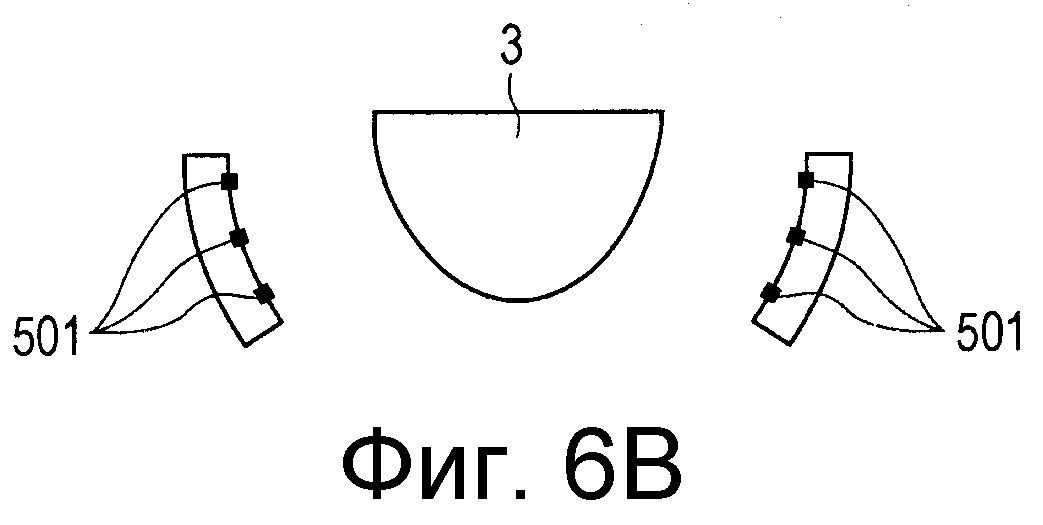
На Фиг. 6B изображена схема, на которой проиллюстрирован видоизмененный вариант устройства согласно первому варианту осуществления настоящего изобретения.
На Фиг. 6C изображена схема, на которой проиллюстрирован видоизмененный вариант устройства согласно первому варианту осуществления настоящего изобретения.
На Фиг. 6D изображена схема, на которой проиллюстрирован видоизмененный вариант устройства согласно первому варианту осуществления настоящего изобретения.
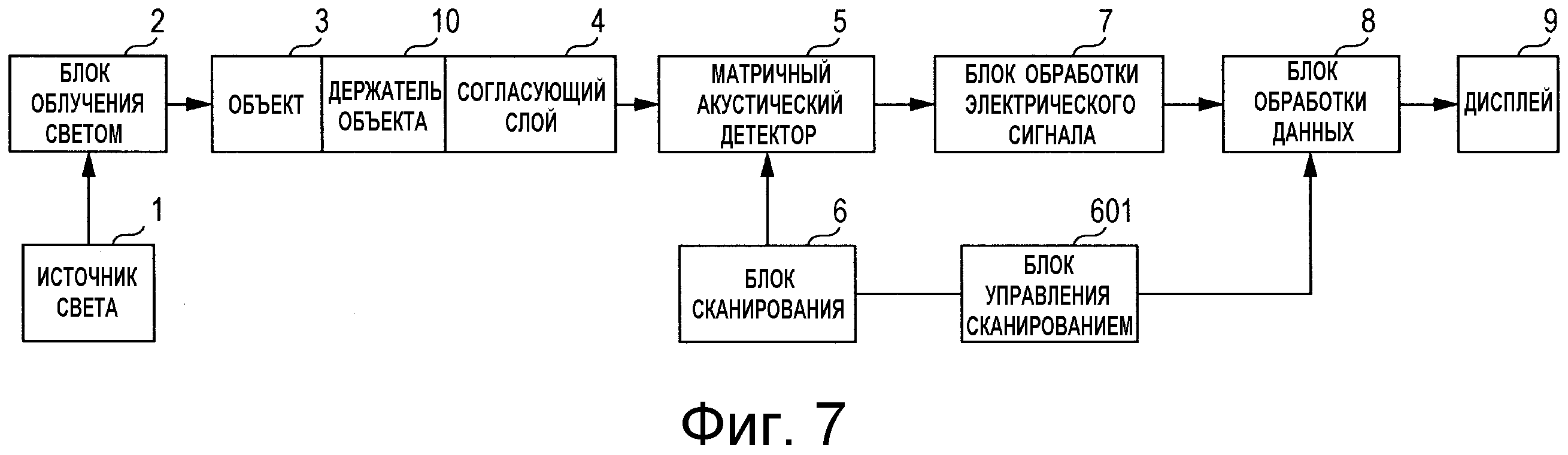
На Фиг. 7 изображена блок-схема, на которой показана конфигурация устройства согласно второму варианту осуществления настоящего изобретения.
На Фиг. 8 изображена принципиальная схема, на которой проиллюстрировано устройство согласно второму варианту осуществления настоящего изобретения.
На Фиг. 9 изображена схема, на которой проиллюстрирован способ обработки, выполняемый в устройстве согласно второму варианту осуществления настоящего изобретения.
На Фиг. 10 изображена блок-схема, на которой показана другая конфигурация устройства согласно второму варианту осуществления настоящего изобретения.
На Фиг. 11 изображена схема последовательности операций, на которой показано функционирование устройства согласно третьему варианту осуществления настоящего изобретения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение отличается тем, что уменьшены изменения разрешающей способности за счет перемещения, по меньшей мере, одного из элементов, которыми являются объект и матричный акустический детектор, в котором упорядоченно размещено множество акустических регистрирующих элементов. Ниже приведено описание вариантов осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления изобретения
Первый вариант осуществления изобретения является основным вариантом осуществления настоящего изобретения. Сначала будет приведено описание компонентов из этого варианта осуществления изобретения, а затем будет приведено описание способа размещения акустических регистрирующих элементов и способа сканирования, которые являются отличительными признаками этого варианта осуществления настоящего изобретения. После этого будет приведено описание способа из этого варианта осуществления изобретения, и, в заключение, будет приведено описание возможных изменений.
На Фиг. 1 изображена блок-схема, на которой показаны компоненты из первого варианта осуществления изобретения. Устройство сбора данных при помощи акустических волн из этого варианта осуществления изобретения включает в себя источник 1 света, блок 2 облучения светом, матричный акустический детектор 5, блок 6 сканирования, блок 7 обработки электрического сигнала, блок 8 обработки данных и дисплей 9. Описание компонентов и объекта будет приведено ниже.
Источник света
Источник 1 света представляет собой устройство, которое генерирует импульсный свет. Для получения высокой выходной мощности источником 1 света может являться лазер или светодиод. Для эффективной генерации фотоакустических волн объект следует облучать светом в течение достаточно короткого промежутка времени в зависимости от тепловых свойств объекта. Если объектом является живой организм, то предпочтительно задать ширину импульса импульсного света, сгенерированного источником 1 света, равным десяткам наносекунд или меньшим. Предпочтительно длина волны импульсного света находится в ближней инфракрасной области, именуемой терапевтическим окном, то есть, от, приблизительно, 700 нм до, приблизительно, 1200 нм. Свет в этой области может проникать относительно глубоко в живой организм, позволяя, таким образом, получать информацию о глубоких частях тела. Если измерение ограничено поверхностью живого организма, то может использоваться видимый свет с длиной волны от, приблизительно, 500 нм до, приблизительно, 700 нм и свет в ближней инфракрасной области. Также предпочтительно, чтобы длина волны импульсного света имела высокий коэффициент поглощения для цели наблюдений.
Блок облучения светом
Блок 2 облучения светом представляет собой блок, который направляет импульсный свет, сгенерированный источником 1 света, на объект 3. Конкретными примерами являются, в том числе, оптические устройства, такие как, например, оптическое волокно, линза, зеркало и рассеиватель. Форма и плотность импульсного света иногда изменяются при использовании этих оптических устройств. Оптические устройства не ограничены вышеупомянутыми примерами, и ими могут являться любые устройства, выполняющие вышеупомянутые функции.
Объект
Объект 3 представляет собой измеряемый объект. Конкретными примерами являются, в том числе, живой организм, например, грудь, и фантомы, моделирующие акустические характеристики и оптические характеристики живого организма, которые предназначены для настройки устройства.
В частности, акустическими характеристиками являются скорость распространения и коэффициент затухания акустических волн, а оптическими характеристиками являются коэффициент поглощения света и эффективное рассеяние света. Необходимо, чтобы объект 3 имел внутри поглотитель света, имеющий высокий коэффициент поглощения света. Примерами поглотителя света в живом организме являются, в том числе, гемоглобин, вода, меланин, коллаген, и липид. Для фантома вещество, имитирующее оптические характеристики, герметично закупорено внутри в качестве поглотителя света. В настоящем изобретении примерами распределения информации внутри объекта 3, сгенерированной путем приема акустических волн, являются, в том числе, распределение исходного звукового давления акустических волн, сгенерированных вследствие облучения светом, распределение плотности поглощения световой энергии, полученное из распределения исходного звукового давления, распределение коэффициента поглощения и распределение плотности веществ, образующих ткань. Примерами распределения плотности вещества являются, в том числе, распределение кислородного насыщения и распределение плотности гемоглобина из-за окисления-восстановления.
Согласующий слой
Согласующий слой 4 представляет собой материал для согласования импедансов, которым заполнено пространство между объектом 3 и матричным акустическим детектором 5 для акустической связи объекта 3 с матричным акустическим детектором 5. Его материалом может являться жидкость, имеющая акустический импеданс, близкий к акустическому импедансу объекта 3 и акустических регистрирующих элементов, и позволяющая проходить через него импульсному свету. Конкретными примерами являются, в том числе, вода, касторовое масло и гель. Поскольку, как описано ниже, относительное положение объекта 3 и матричного акустического детектора 5 изменяется, то оба компонента: объект 3 и матричный акустический детектор 5, могут быть помещены в раствор, образующий согласующий слой 4.
Матричный акустический детектор
Матричный акустический детектор 5 представляет собой детектор, включающий в себя множество акустических регистрирующих элементов, которые преобразовывают акустические волны в электрические сигналы. Матричный акустический детектор 5 размещен на поверхности в контакте с раствором, образующим согласующий слой 4, вокруг объекта 3. Акустические регистрирующие элементы, принимающие акустические волны от объекта 3, могут иметь высокую чувствительность и широкую полосу частот. Конкретными примерами являются, в том числе, акустические регистрирующие элементы, в которых используют пьезоэлектрический преобразователь (PZT), мембрану из поливинилиденфторида (PVDF), емкостной микромеханический ультразвуковой преобразователь (cMUT) и интерферометр Фабри-Перо. Однако, акустические регистрирующие элементы не ограничены вышеупомянутыми примерами, и ими могут являться любые акустические регистрирующие элементы, выполняющие вышеупомянутую функцию.
Блок сканирования
Блок 6 сканирования представляет собой блок, обеспечивающий сканирование (перемещение) матричного акустического детектора 5 в трех измерениях. В этом варианте осуществления изобретения объект 3 является неподвижным, и матричный акустический детектор 5 перемещают (сканируют) с использованием трехкоординатного стола в качестве блока 6 сканирования для изменения относительного положения объекта 3 и матричного акустического детектора 5. Однако в настоящем изобретении необходимо изменять только относительное положение объекта 3 и матричного акустического детектора 5; матричный акустический детектор 5 может быть неподвижным, и может выполняться сканирование объекта 3. Когда необходимо переместить объект 3, то возможна конфигурация, в которой объект 3 перемещают путем перемещения поддерживающего узла (на чертеже не показан), который служит опорой для объекта 3. В альтернативном варианте могут перемещаться оба компонента: объект 3 и матричный акустический детектор 5. Сканирование может производиться непрерывно, но может быть повторено с фиксированным шагом. Блок 6 сканирования может представлять собой координатный стол с электрическим приводом, оснащенный шаговым электродвигателем и т.п., но также может представлять собой координатный стол с ручным приводом. Блок 6 сканирования не ограничен вышеупомянутыми примерами, но им может являться любой блок сканирования, сконфигурированный для перемещения, по меньшей мере, одного из компонентов: объекта 3 и матричного акустического детектора 5.
Блок управления сканированием
Блок 601 управления сканированием управляет блоком 6 сканирования, обеспечивая перемещение объекта 3 и матричного акустического детектора 5 друг относительно друга. В частности, блок 601 управления сканированием определяет скорость и направление перемещения блока 6 сканирования и сообщает о них в блок 6 сканирования. Блок 601 управления сканированием выводит информацию о скорости и направлении перемещения блока 6 сканирования в блок 8 обработки данных.
Блок обработки электрического сигнала
Блок 7 обработки электрического сигнала имеет функцию усиления выходных аналоговых электрических сигналов (сигналов от приемников) из матричного акустического детектора 5 и преобразовывает эти аналоговые сигналы в цифровые сигналы (цифровые сигналы от приемников). Для эффективного получения данных блок 7 обработки электрического сигнала может иметь такое количество аналогово-цифровых преобразователей (ADC), которое равно количеству акустических регистрирующих элементов матричного акустического детектора 5; однако, может быть подключен один ADC по очереди.
Блок обработки данных
Блок 8 обработки данных генерирует данные изображения (восстановленного изображения) путем обработки цифровых сигналов, полученных блоком 7 обработки электрического сигнала. Конкретными примерами блока 8 обработки данных являются, в том числе, компьютер и электрическая схема. Примерами восстановления изображения являются, в том числе, преобразование Фурье, общее обратное проецирование, обратное проецирование с фильтрацией и итерационное восстановление. В настоящем изобретении может использоваться любое восстановление изображения.
Дисплей
Дисплей 9 отображает данные изображения, созданные блоком 8 обработки данных как изображение. Конкретными примерами являются, в том числе, жидкокристаллический дисплей и органический электролюминесцентный (EL) дисплей. Дисплей 9 может являться отдельным от устройства сбора данных при помощи акустических волн из настоящего изобретения.
Ниже будет приведено описание способа размещения множества акустических регистрирующих элементов 501 и способа сканирования матричного акустического детектора 5, которые являются отличительными признаками настоящего изобретения. Способ размещения согласно одному из вариантов осуществления настоящего изобретения будет описан с использованием Фиг. 2. Акустические регистрирующие элементы 501 прикреплены к контейнеру, внутренняя стенка которого (сторона 2 объекта) является полусферической, а его приемные поверхности обращены к центру полусферы. В случае схемы размещения, показанной на Фиг. 2, разрешение изображения, полученного с использованием общего обратного проецирования, является самой высокой в центре полусферы и уменьшается с увеличением расстояния от центра. Даже если акустические регистрирующие элементы 501 не размещены на сферической поверхности, область с самой высокой разрешающей способностью однозначно зависит от размещения акустических регистрирующих элементов 501.
Здесь, в настоящем изобретении в качестве области 301 с высокой разрешающей способностью задана область с высокой разрешающей способностью в окрестностях центра, то есть, область с самой высокой разрешающей способностью. Протяженность области 301 с высокой разрешающей способностью зависит от того, насколько большое отличие от самой высокой разрешающей способности разрешено. Например, если акустические регистрирующие элементы 501 размещены в форме сферы, то диаметр области 301 с высокой разрешающей способностью выражается уравнением (1).
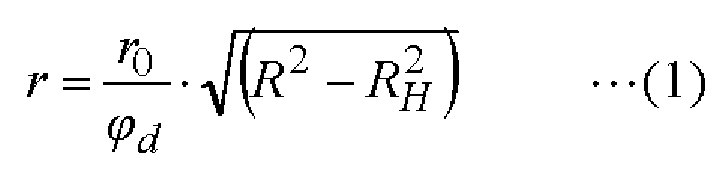
где - допустимая разрешающая способность, - самая высокая разрешающая способность, - диаметр сферы, на которой размещены акустические регистрирующие элементы 501, и - диаметр каждого из акустических регистрирующих элементов 501. За счет изменения относительного положения области 301 с высокой разрешающей способностью и объекта 3, и выполнения восстановления, обеспечена равномерность разрешающей способности. В конечном счете, в настоящем изобретении изменяют относительное положение области с высокой разрешающей способностью и объекта 3 путем изменения относительного положения области с самой высокой разрешающей способностью и объекта 3.
В настоящем изобретении сфера включает в себя не только идеальную сферу, но также и эллипсоид, выраженный уравнением (2) (форму, образованную путем растягивания эллипса в трех измерениях, поверхность которого сформирована из поверхности второго порядка).
где , и - длины половин значений диаметра в направлениях, соответственно, оси , оси и оси. Эллипсоид, удовлетворяющий условию , является идеальной сферой. Эллипсоид, в котором две из величин , и равны друг другу, является сфероидом, который получен путем вращения эллипса вокруг оси эллипса. В настоящем изобретении сфера также включает в себя сфероид. Эллипсоид является симметричным относительно плоскости , плоскости , и плоскости , подобно сфере.
При измерениях внутренняя часть полусферической поверхности матричного акустического детектора 5 заполнена раствором, служащим в качестве согласующего слоя 4, и объект 3 размещают в растворе. Лазерное излучение 201 излучают так, чтобы облучать объект 3 с нижней части (полюса) полусферического контейнера. Трехкоординатный стол, являющийся блоком 6 сканирования, обеспечивает сканирование матричного акустического детектора 5, изменяя его положение относительно объекта 3. Таким образом, происходит сканирование области 301 с высокой разрешающей способностью поперек объекта 3. Здесь, для получения равномерной разрешающей способности может быть осуществлено сканирование области 301 с высокой разрешающей способностью в направлении неравномерной разрешающей способности, то есть, в направлении градиента разрешающей способности. Эффекты этого будут описаны ниже.
На Фиг. 3A-3D проиллюстрирован конкретный способ сканирования. На Фиг. 3A показано исходное положение. Сигналы от приемников получают во время сканирования всего матричного акустического детектора 5 в направлении стрелки (влево в плоскости чертежа) с использованием трехкоординатного стола. Когда матричный акустический детектор 5 доходит до положения, показанного на Фиг. 3B, выполняют сканирование всем матричным акустическим детектором 5 вниз в плоскости чертежа до тех пор, пока он не дойдет до состояния, показанного на Фиг. 3C. После этого выполняют сканирование и регистрацию сигнала до тех пор, пока не будет достигнуто взаимное расположение, показанное на Фиг. 3D. После того, как эта операция выполнена целиком в одной плоскости (в плоскости X-Z), матричный акустический детектор 5 перемещают в направлении вглубь (в направлении Y) в плоскости чертежа, и выполняют сканирование и регистрацию сигнала таким же самым образом.
Ниже приведено описание способа измерения из этого варианта осуществления изобретения со ссылкой на Фиг. 4. Сначала блок 2 облучения светом облучает объект 3 импульсным светом (операция S1). Акустические регистрирующие элементы 501 принимают акустические волны, возбужденные излученным импульсным светом в поглотителе света в объекте 3, и преобразовывают их в сигналы от приемников. Блок 7 обработки электрического сигнала преобразовывает сигналы от приемников в цифровые сигналы (операция S2). Одновременно с этим блок 8 обработки данных производит сбор информации о месте сканирования, соответствующем цифровым сигналам, полученным из блока 601 управления сканированием (операция S3).
Затем блок 601 управления сканированием определяет, завершено ли сканирование всей области измерений областью 301 с высокой разрешающей способностью (операция S4). Всей областью измерений не является весь объект 3 целиком, а ей может являться любая намеченная область. Если сканирование не было завершено, то производят сканирование матричным акустическим детектором 5, пока взаимное расположение между акустическими регистрирующими элементами 501 является фиксированным (операция S5), и применение импульсного света и сбор сигналов от акустических волн повторяют. Фраза "фиксация взаимного расположения акустических регистрирующих элементов” означает, что места расположения акустических регистрирующих элементов 501 на матричном акустическом детекторе 5 не изменяются.
При операции S5 сканирование и сбор сигналов от приемников могут производиться через регулярные промежутки времени. В частности, матричный акустический детектор 5 может быть перемещен так, что импульсный свет применяют, по меньшей мере, один раз, когда относительное положение области 301 с высокой разрешающей способностью и объекта 3 изменяется на расстояние, равное размеру (диаметру) области 301 с высокой разрешающей способностью. Это означает, что сбор сигналов от приемников производят, по меньшей мере, один раз, когда область 301 с высокой разрешающей способностью перемещается на расстояние, равное размеру области 301 с высокой разрешающей способностью.
Чем меньше расстояние, просканированное в течение промежутка времени от одного облучения светом до следующего облучения светом, тем в большей степени может быть обеспечена равномерность разрешающей способности. Однако, малое расстояние сканирования (то есть, низкая скорость сканирования) приводит к увеличению времени измерений. Таким образом, скорость сканирования и промежуток времени для сбора сигналов от приемников могут быть заданы надлежащим образом с учетом желательной разрешающей способности и желательного времени измерений.
Сканирование выполняют в трех измерениях и в направлении градиента разрешающей способности. После того, как сканирование через всю область измерений завершено, блок 8 обработки данных выполняет восстановление изображения, на основании полученных цифровых сигналов и информации о месте сканирования (операция S6). При восстановлении изображения с использованием общего обратного проецирования полученные цифровые сигналы подвергают предварительной обработке, например, дифференцированию и фильтрации шумов, а затем подвергают общему обратному проецированию, при котором сигналы распространяют из положений акустических регистрирующих элементов 501 в обратном направлении. Это выполняют для матричного акустического детектора 5 во всех положениях сканирования, и распространенные обработанные сигналы накладывают друг на друга. Эта обработка позволяет получать распределение информации об объекте, такой как, например, распределение коэффициента поглощения, в качестве данных изображения. В итоге, блок 8 обработки данных выводит полученные данные изображения на дисплей 9, и дисплей 9 выводит на экран это изображение (операция S7).
На Фиг. 5A и 5B изображены принципиальные схемы, на которых проиллюстрированы эффекты обеспечения равномерности разрешающей способности в направлении сканирования. Градации выражают значения разрешающей способности в отдельных местах расположения, где темная градация выражает высокую разрешающую способность, а светлая градация выражает низкую разрешающую способность. На Фиг. 5A показана разрешающая способность с латеральным градиентом. Если сканирование выполняют в направлении градиента разрешающей способности, то обеспечена равномерность разрешающей способности в латеральном направлении с высокой разрешающей способностью за исключением области на правом краю, которая представляет собой конечный участок сканирования.
С другой стороны, на Фиг. 5B показана разрешающая способность с вертикальным градиентом. Если сканирование выполняют в направлении, в котором отсутствует градиент разрешающей способности, то равномерность разрешающей способности по вертикали не обеспечена. Поскольку в этом варианте осуществления изобретения акустические регистрирующие элементы 501 размещены на сферической поверхности, то градиент разрешающей способности присутствует во всех направлениях от центра сферы, и, следовательно, сканирование может выполняться в любых направлениях.
Ниже приведено описание возможных изменений настоящего изобретения (видоизменений первого варианта осуществления изобретения). Блоку 6 сканирования необходимо только лишь выполнять трехмерное сканирование, в том числе, не только линейное сканирование, но также и сканирование с поворотом. В частности, вращательное перемещение матричного акустического детектора 5 вокруг оптической оси лазерного излучения 201, показанное на Фиг. 2, и линейное сканирование могут быть объединены. Сканирование может выполняться так, чтобы обеспечивать короткую длину пути.
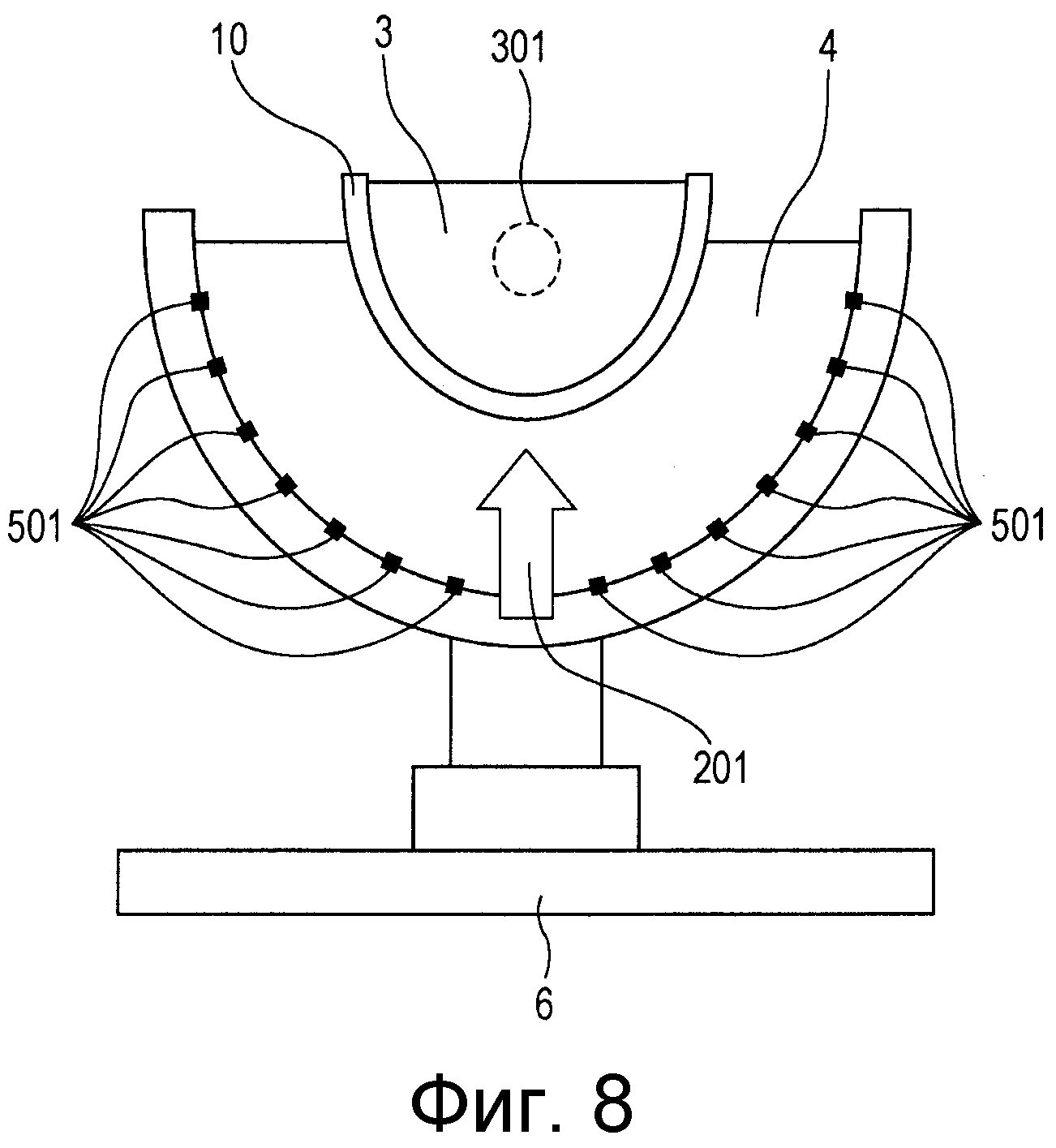
Для обеспечения равномерности разрешающей способности по всему объекту 3 предпочтительно, чтобы полусферический контейнер, служащий в качестве матричного акустического детектора 5, был в два или более раз большим, чем объект 3, чтобы весь объект 3 мог быть просканирован областью 301 с высокой разрешающей способностью. Другими словами, в том случае, когда для удерживания объекта 3 используется удерживающий элемент (держатель 10 объекта, показанный на Фиг. 8, описание которого приведено ниже), предпочтительно, чтобы внутренний диаметр матричного акустического детектора 5 (диаметр полусферической поверхности, на которой предусмотрены акустические регистрирующие элементы 501) был в два или более раз большим, чем как наружный диаметр удерживающего элемента.
Кроме того, когда выполняют трехмерное сканирование, то объем объекта 3 в растворе, служащем в качестве согласующего слоя 4, изменяется. Следовательно, может быть предусмотрено наличие впускного отверстия, через которое заливают раствор, и выпускного отверстия, через которое выпускают раствор, для сохранения постоянного уровня раствора, регулируя, тем самым, количество раствора.
Акустические регистрирующие элементы 501 могут быть размещены в форме сферы; в альтернативном варианте они не обязательно должны быть размещены в форме сферы, но всего лишь необходимо, чтобы они были размещены на криволинейной поверхности или на плоской поверхности для получения заданной области с самой высокой разрешающей способностью. То есть, в настоящем изобретении акустические регистрирующие элементы 501 необходимо разместить всего лишь так, чтобы приемные поверхности были обращены к объекту 3, и чтобы приемные поверхности, по меньшей мере, некоторых из акустических регистрирующих элементов 501, были расположены под различными углами. Другими словами, некоторые из акустических регистрирующих элементов 501 могут быть размещены в форме вогнутой поверхности относительно объекта 3 так, чтобы приемные поверхности были расположены под различными углами. Само собой разумеется, что разрешающая способность в меньшей степени зависит от размера приемных участков акустических регистрирующих элементов 501 по мере того, как схема размещения акустических регистрирующих элементов приближается к форме сферы.
На Фиг. 6A-6D проиллюстрированы примеры размещения акустических регистрирующих элементов 501, применимые к настоящему изобретению. На Фиг. 6A и 6B акустические регистрирующие элементы 501 размещены вдоль криволинейной поверхности части сферической поверхности. При этом, в настоящем изобретении криволинейная поверхность включает в себя не только абсолютно гладкую криволинейную поверхность, но также и криволинейную поверхность, имеющую частичные неровности. Конфигурации, показанные на Фиг. 6A и 6B, обеспечивают возможность гибкого размещения блока 2 облучения светом и т.д. На Фиг. 6C акустические регистрирующие элементы 501 размещены вдоль криволинейной поверхности, которая не является сферической. В этом случае может быть отрегулировано компромиссное соотношение между разрешающей способностью и равномерностью разрешающей способности. На Фиг. 6D акустические регистрирующие элементы 501 размещены в двух линейных конфигурациях (плоских формах). В этом случае, поскольку акустические регистрирующие элементы 501 размещены в линейных конфигурациях под двумя различными углами, окружая объект 3, то может быть обеспечена широкая область равномерной разрешающей способности, и ширина шага сканирования может быть увеличена. Несмотря на то, что на Фиг. 6B и 6D показаны примеры, в которых количество криволинейных поверхностей или плоских поверхностей, на которых размещены акустические регистрирующие элементы 501, равно двум, в настоящем изобретении акустические регистрирующие элементы 501 могут быть размещены на более чем двух поверхностях или, само собой разумеется, на одной непрерывной поверхности. Может быть предусмотрено любое желательное количество акустических регистрирующих элементов 501.
В этом варианте осуществления изобретения описанная выше конфигурация и описанный выше способ обработки позволяют получать разрешающую способность изображения во всей области измерений более высокую или равную высокой разрешающей способности и более низкую или равную самой высокой разрешающей способности, и уменьшить изменения разрешающей способности, то есть, увеличить область равномерной разрешающей способности.
Второй вариант осуществления изобретения
Коррекция затухания сигнала
Во втором варианте осуществления изобретения будет описана конфигурация для коррекции сигналов от приемников. Когда акустические волны распространяются в объекте 3 и в согласующем слое 4, интенсивность акустических волн ослабляется. Расстояние распространения сгенерированных акустических волн в объекте 3 и расстояние распространения в согласующем слое 4 на пути от места генерации акустической волны до акустических регистрирующих элементов 501 зависят от положения матричного акустического детектора 5 при сканировании. В том случае, когда коэффициенты затухания в объекте 3 и в согласующем слое 4, которыми являются, соответственно, живой организм и вода, отличаются друг от друга, иногда не может быть вычислен правильный контраст. Таким образом, в этом варианте осуществления изобретения будет описан способ коррекции различных затуханий интенсивности.
На Фиг. 7 показана конфигурация устройства сбора данных при помощи акустических волн из второго варианта осуществления изобретения. Эта конфигурация отличается от конфигурации из первого варианта осуществления изобретения тем, что в качестве удерживающего элемента для удерживания объекта 3 добавлен держатель 10 объекта. Второй вариант осуществления изобретения также отличается способом обработки, выполняемым в блоке 8 обработки данных. Поскольку остальные конфигурации являются теми же самыми, что и конфигурации из первого варианта осуществления изобретения, то их описания будут опущены. Как показано на Фиг. 8, держатель 10 объекта удерживает объект 3 и задает форму объекта 3. Держателем 10 объекта может являться тонкий жесткий удерживающий элемент, акустический импеданс которого является близким к акустическому импедансу объекта 3 или согласующего слоя 4. Более предпочтительно акустический импеданс имеет величину между величиной акустического импеданса объекта 3 и величиной акустического импеданса согласующего слоя 4. Конкретным примером является полиметилпентен. Предпочтительно держатель 10 объекта имеет толщину от 0,1 мм до 5 мм.
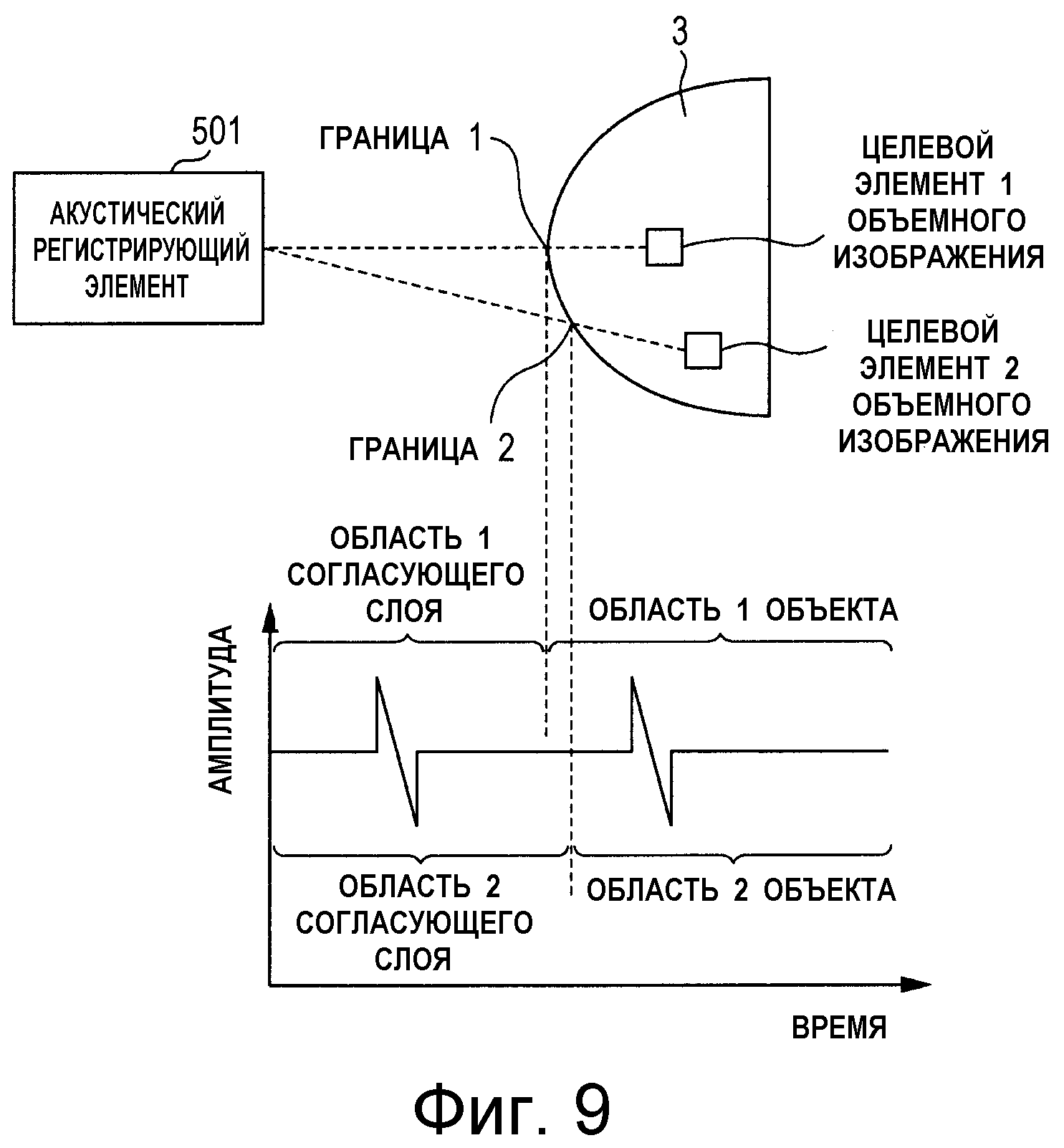
Способ измерения из второго варианта осуществления изобретения отличается от способа измерения из первого варианта осуществления изобретения процедурой восстановления изображения в блоке 8 обработки данных (операция S6 на Фиг. 4). В этом варианте осуществления изобретения граница между объектом 3 и согласующим слоем 4 может быть определена по форме держателя 10 объекта, и область объекта 3 и область согласующего слоя 4 могут быть определены из полученных сигналов путем преобразования расстояния во время. Поскольку держатель 10 объекта является здесь достаточно тонким, то распространением акустических волн в держателе 10 объекта пренебрегают.
Для одного акустического регистрирующего элемента 501 затухание обычно может быть надлежащим образом скорректировано путем деления сигналов, соответствующих отдельным областям, на коэффициенты акустического затухания отдельных областей. Однако, как показано на Фиг. 9, сигнал, полученный одним акустическим регистрирующим элементом 501, представляет собой суперпозицию сигналов из множества элементов объемного изображения. Время на границе зависит от целевого элемента объемного изображения, вследствие чего положение границы не может быть однозначно определено. Таким образом, когда необходимо восстановить целевой элемент 1 объемного изображения, задают границу 1, вычисленную исходя из взаимного расположения элемента 1 объемного изображения и акустического регистрирующего элемента 501, и сигнал делят на коэффициент затухания, соответствующий этой области, с учетом границы 1, выполняя, тем самым, его коррекцию. Коррекцию сигналов от других акустических регистрирующих элементов 501 также выполняют таким же самым образом, подвергают предварительной обработке, например, дифференцированию, и обеспечивают их суперпозицию для генерации данных об элементе объемного изображения для целевого элемента 1 объемного изображения. Для целевого элемента 2 объемного изображения также задают границу 2, и выполняют коррекция с учетом этой границы 2.
В этом варианте осуществления изобретения, даже в том случае, если для одного и того же сигнала от приемника заданы различные границы, затухание может быть надлежащим образом скорректировано путем суперпозиции сигналов от приемников акустических регистрирующих элементов 501. Таким образом, правильный контраст может быть вычислен даже в том случае, если коэффициенты акустического затухания в объекте 3 и в согласующем слое 4 являются различными.
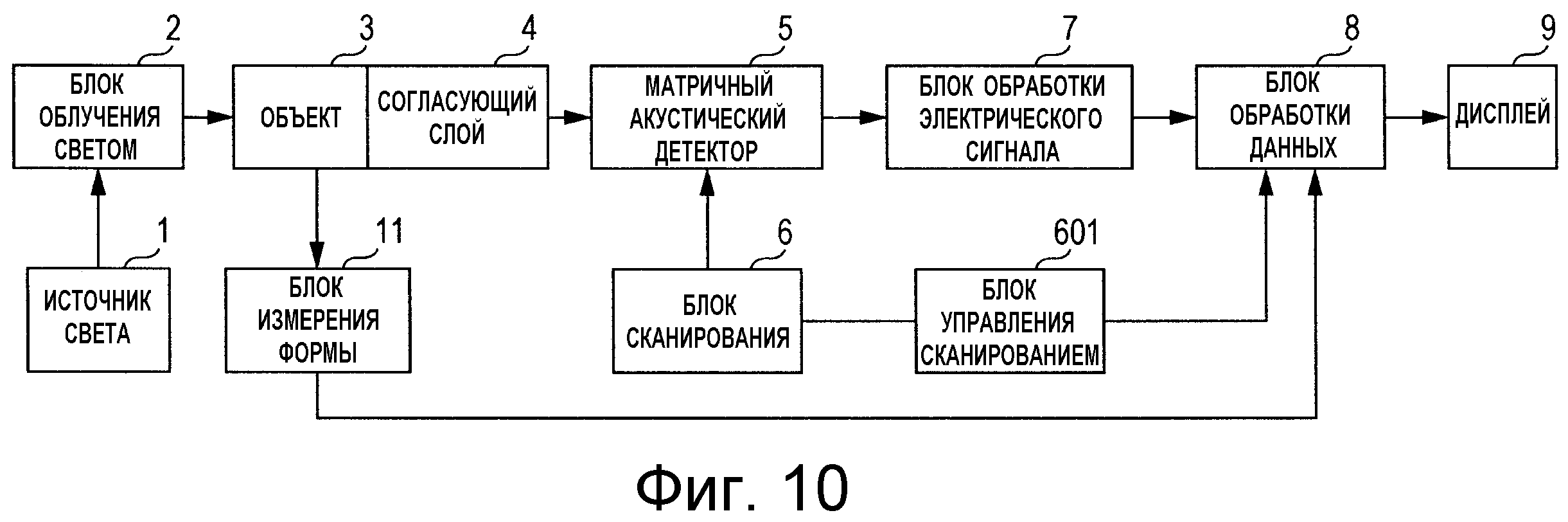
Кроме того, в этом варианте осуществления изобретения границу между объектом 3 и согласующим слоем 4 определяют по форме держателя 10 объекта; вместо этого, как показано на Фиг. 10, возможен способ измерения внешней формы объекта 3 посредством блока 11 измерения формы для получения положения границы и коррекции контраста. Поскольку в этом способе объект 3 не соприкасается с держателем 10 объекта, то нагрузка на объект 3 уменьшена.
Третий вариант осуществления изобретения
Коррекция преломления
Третий вариант осуществления изобретения отличается тем, что выполняют коррекцию сигналов с учетом преломления акустических волн на границе раздела сред. Несмотря на то, что согласующий слой 4 может иметь акустический импеданс близкий к акустическому импедансу объекта 3, фактически трудно обеспечить полное совпадение импедансов. Соответственно, поскольку акустический импеданс равен произведению скорости распространения и плотности акустических волн, скорости распространения акустических волн в согласующем слое 4 и в объекте 3 иногда отличаются друг от друга. В этом случае акустические волны преломляются, что, следовательно, приводит к уменьшению разрешающей способности. Здесь будет приведено описание способа коррекции преломления для повышения разрешающей способности.
Конфигурация из третьего варианта осуществления изобретения является той же самой, что и конфигурация из второго варианта осуществления изобретения, показанная на Фиг. 7, в которой предусмотрен держатель 10 объекта в качестве удерживающего элемента для удерживания объекта 3. Третий вариант осуществления изобретения также отличается от первого и второго вариантов осуществления изобретения способом обработки в блоке 8 обработки данных. Поскольку остальные конфигурации являются теми же самыми, что и конфигурации из первого и второго вариантов осуществления изобретения, то их описания опущены.
Способ измерения отличается от второго варианта осуществления изобретения процедурой восстановления изображения в блоке 8 обработки данных (операция S6 на Фиг. 4). При обратном проецировании при обработке по восстановлению изображения, при которой сигналы, подвергнутые предварительной обработке, распространяют от акустических регистрирующих элементов 501 в обратном направлении и обеспечивают их суперпозицию, коррекцию выполняют с учетом преломления, вызванного на границе раздела между объектом 3 и согласующим слоем 4 во время обратного проецирования. Скорости распространения акустических волн в объекте 3 и в согласующем слое 4 могут быть измерены заранее, поскольку они необходимы для коррекции преломления.
Как и во втором варианте осуществления изобретения, граница (граница раздела) между объектом 3 и согласующим слоем 4 может быть определена по форме держателя 10 объекта, исходя из которой могут быть определены углы падения. Кроме того, поскольку скорости распространения акустических волн, проходящих через объект 3 и согласующий слой 4 являются известными, то показатели преломления могут быть вычислены из отношения скоростей распространения акустических волн. Поскольку показатели преломления и углы падения являются известными, то углы преломления могут быть определены из закона Снеллиуса. Соответственно, при обратном проецировании обработанных сигналов сигналы распространяются не прямо, а под углами преломления, вычисленными на границе, и обеспечивают их суперпозицию для генерации данных изображения. К тому же, поскольку в этом варианте осуществления изобретения держатель 10 объекта является достаточно тонким, то распространением акустических волн в держателе 10 объекта пренебрегают.
В этом варианте осуществления изобретения может быть скорректировано уменьшение разрешающей способности вследствие преломления, вызванного разностью между скоростями распространения акустических волн. Кроме того, как и во втором варианте осуществления изобретения, граница между объектом 3 и согласующим слоем 4 может быть измерена с использованием блока 11 измерения формы вместо держателя 10 объекта.
Четвертый вариант осуществления изобретения
Отображение в реальном масштабе времени
Несмотря на то, что восстановление, описанное в первом варианте осуществления изобретения, выполняют после того, как были получены все сигналы, результаты измерений не могут быть получены до конца, если время измерений является длительным. Кроме того, если измерение закончилось неудачей, то время было затрачено впустую. Таким образом, в четвертом варианте осуществления изобретения будет описан способ отображения результата в реальном масштабе времени.
Несмотря на то, что конфигурация из четвертого варианта осуществления изобретения является той же самой, что и конфигурация из первого варианта осуществления изобретения, показанного на Фиг. 1, обработка, выполняемая в блоке 8 обработки данных, является иной.
Способ измерения из этого варианта осуществления изобретения будет описан со ссылкой на Фиг. 11. Сначала объект 3 освещают импульсным светом (операция S1). Акустические волны, возбужденные импульсным светом, принимают акустическими регистрирующими элементами 501, преобразовывают в аналоговые сигналы от приемников, а затем преобразовывают в цифровые сигналы блоком 7 обработки электрического сигнала (операция S2). Блок 8 обработки данных производит сбор информации о месте сканирования, соответствующей полученным цифровым сигналам из блока 601 управления сканированием (операция S3). Блок 8 обработки данных восстанавливает область 301 с высокой разрешающей способностью с использованием полученных сигналов (операция S8). В этот момент блок 8 обработки данных выводит данные изображения, восстановленные в месте, соответствующем области 301 с высокой разрешающей способностью, на дисплей 9, и дисплей 9 выводит на экран это изображение (операция S9).
Затем блок 601 управления сканированием определяет, завершено ли сканирование всей области измерений областью 301 с высокой разрешающей способностью (операция S4). Если сканирование не было завершено, то производят сканирование матричным акустическим детектором 5 (операция S5). После этого операции S1, S2, S3, S8 и S9 повторяют. Поскольку ширина шага сканирования является меньшей, чем область 301 с высокой разрешающей способностью, то выводимые на экран дисплея области изображения при первом измерении и при втором измерении являются наложенными одна на другую. Таким образом, данные изображения могут быть созданы путем определения среднего значения для наложенных областей. Повторение обработки позволяет выводить изображение на экран дисплея в реальном масштабе времени. Однако, поскольку количество сигналов, используемых при восстановлении, мало, вследствие чего объем информации является малым, то качество изображения является более низким, чем качество изображения в первом варианте осуществления изобретения. Соответственно, после завершения сканирования блок 8 обработки данных выполняет восстановление с использованием всех сигналов (операция S6) для перезаписи данных изображения и их вывода на экран дисплея (операция S7).
Четвертый вариант осуществления изобретения позволяет выполнять измерение во время проверки результатов в реальном масштабе времени.
Несмотря на то, что настоящее изобретение было описано со ссылкой на варианты его осуществления, которые приведены в качестве примеров, следует понимать, что изобретение не ограничено раскрытыми вариантами его осуществления, которые приведены в качестве примеров. Объем приведенной ниже формулы изобретения следует толковать в самом широком смысле, чтобы все такие видоизмененные варианты и эквивалентные структуры и функции не выходили за его пределы.
По этой заявке испрашивается приоритет на основании заявок на патенты Японии № 2011-027542, поданной 10 февраля 2011 г., и № 2011-278895, поданной 20 декабря 2011 г., которые тем самым включены сюда путем ссылки в полном объеме.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - источник света
2 - блок облучения светом
3 - объект
4 - согласующий слой
5 - матричный акустический детектор
6 - блок сканирования
7 - блок обработки электрического сигнала
8 - блок обработки данных
9 - дисплей
10 - держатель объекта
11 - блок измерения формы
Реферат
Изобретение относится к устройствам для сбора данных при помощи акустических волн, в частности к фотоакустической томографии. Устройство содержит детектор, включающий множество регистрирующих элементов для приема на соответствующих приемных поверхностях акустических волн от области измерения объекта, причем приемные поверхности, по меньшей мере, некоторых из регистрирующих элементов, ориентированных под различными углами, зафиксированы относительно друг друга, блок сканирования для перемещения, по меньшей мере, одного из объекта и детектора, блок управления для управления блоком сканирования так, что регистрирующие элементы принимают акустические волны от области измерения и относительное положение объекта и области с самой высокой разрешающей способностью области измерения изменяется, причем область с самой высокой разрешающей способностью определена в зависимости от размещения регистрирующих элементов. Использование изобретения позволяет повысить равномерность разрешающей способности. 17 з.п. ф-лы, 11 ил.
Формула
детектор, включающий в себя множество регистрирующих элементов для приема на соответствующих приемных поверхностях акустических волн от области измерения объекта, причем приемные поверхности, по меньшей мере, некоторых из регистрирующих элементов, ориентированных под различными углами, зафиксированы относительно друг друга,
блок сканирования, сконфигурированный для перемещения, по меньшей мере, одного из объекта и детектора,
блок управления, сконфигурированный для управления блоком сканирования,
причем блок управления предназначен для управления блоком сканирования так, что регистрирующие элементы принимают акустические волны от области измерения, и
относительное положение объекта и области с самой высокой разрешающей способностью области измерения изменяется, причем область с самой высокой разрешающей способностью определена в зависимости от размещения регистрирующих элементов.
детектор представляет собой контейнер, боковая поверхность которого, обращенная к объекту, является сферической поверхностью, и
регистрирующие элементы размещены на сферической поверхности.
детектор представляет собой контейнер,
регистрирующие элементы размещены на боковой поверхности контейнера, обращенной к объекту,
материал для согласования импедансов предусмотрен в пространстве между объектом и детектором.
диаметр формы полусферы, включающей в себя регистрирующие элементы, является в два или более раз большим, чем наружный диаметр удерживающего элемента.
при этом блок управления предназначен для управления перемещением блока сканирования так, чтобы импульсный свет был приложен к объекту, по меньшей мере, один раз, когда относительное положение изменяется на расстояние, равное размеру области с высокой разрешающей способностью.
источник света, сконфигурированный для генерирования импульсного света, причем акустические волны сгенерированы в объекте посредством облучения импульсным светом сгенерированным источником света,
причем блок управления предназначен для управления перемещением блока сканирования так, чтобы импульсный свет прикладывался к объекту, по меньшей мере один раз, при изменении относительного положения на расстояние, равное размеру области с высокой разрешающей способностью.
блок обработки, сконфигурированный для создания распределения информации внутри объекта с использованием сигналов от приемников на выходе регистрирующих элементов, в котором
блок обработки предназначен для создания распределения информации с использованием множества сигналов от приемников, которые получены во множестве положений сканирования.
Комментарии