Устройство и способ определения сигнала объема дыхания по данным изображения - RU2677003C2
Код документа: RU2677003C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству для определения сигнала объема дыхания от субъекта и к соответствующему способу, в частности, настоящее изобретение относится к измерениям, которые можно использовать для удаленного определения объема дыхания субъекта, где область, представляющую интерес, определяют автоматически и объем дыхания субъекта определяют часто или непрерывно посредством удаленного измерения.
УРОВЕНЬ ТЕХНИКИ
Показатели жизнедеятельности человека, например частота дыхания, служат в качестве индикаторов текущего состояния человека и в качестве предсказания серьезных медицинских событий. По этой причине осуществляют экстенсивный мониторинг показателей жизнедеятельности в условиях стационара и амбулатории, дома или в других медицинских, рекреационных или спортивных условиях.
Мониторинг показателей жизнедеятельности или физиологических сигналов на основе камеры, таких как частота дыхательных движений, представляет собой известный способ удаленного или бесконтактного измерения показателей жизнедеятельности человека. Мониторинг показателей жизнедеятельности на основе камеры делает возможной, помимо того преимущества, что является полностью бесконтактным, двухмерную информацию, которая допускает измерение во многих точках и на большой площади и часто содержит дополнительную контекстную информацию. Эту дополнительную информацию можно использовать при измерении дополнительных показателей жизнедеятельности, таких как дыхательный объем.
Измерение дыхательного объема важно для диагностирования заболеваний и оценки терапии дыхательной системы, например, диагностирование во сне и неонатология. Обыкновенные системы для измерения дыхательного объема в клинической практике требуют использования спирометров, однако эти спирометры громоздки, требуют множества зондов и представляют собой измерения на основе потока, при которых субъекту приходится вдыхать и выдыхать из трубки, которая чрезвычайно неудобна для пользователя. Кроме того, измерение значительно зависит от сотрудничества пациента, оно мешает нормальному дыханию субъекта и его использование неудобно для пациентов с затруднением дыхания.
Существующие измерения объема дыхания на основе камеры или требуют вычисления трехмерной карты всей грудной клетки или необходимы маркеры, которые прикрепляют к субъекту. Реконструкция трехмерной поверхности требует точной оценки всей грудной клетки с помощью камеры и нужен активный источник излучения или множество камер для того, чтобы предоставлять надежную трехмерную карту, что несет большую техническую нагрузку.
Альтернативно, использование маркеров, которые нужно прикреплять к грудной клетке субъекта, неудобно на практике.
Соответствующее устройство для измерения вариабельности дыхания с использованием импедансных контактных зондов для измерения движения тела, например, известен из WO 2009 363 12 A2.
Известны другие способы, в которых используют воспринимающие глубину камеры или трехмерные камеры для того, чтобы обнаруживать дыхание и для того, чтобы определять объем дыхания субъекта.
Недостаток известных способов измерения дыхательного объема субъекта состоит в том, что техническая нагрузка возрастает из-за сложных трехмерных оптических измерений объема дыхания или что использование известных систем неудобно из-за использования спирометров или маркеров для обнаружения движения грудной клетки субъекта.
В US 2013/0002832 A1 раскрыты способ и система для мониторинга объекта, которые включают проецирование паттерна излучения на объект, регистрацию в первый момент времени первых данных изображения, представляющих часть паттерна излучения, спроецированного на объект, где первые данные изображения представляет трехмерную конфигурацию объекта в первый момент времени, регистрацию во второй момент времени вторых данных изображения, представляющих часть паттерна излучения, спроецированного на объект, где вторые данные изображения представляют трехмерную конфигурацию объекта во второй момент времени и обработку первых и вторых данных изображения для того, чтобы генерировать другие данные, представляющие изменение конфигурации объекта между первым и вторым моментами времени.
В WO 2012/140531 A1 раскрыто устройство и способ для извлечения информации из характеристических сигналов, где принимают поток данных, который можно получать из электромагнитного излучения, испускаемого или отражаемого объектом, и где поток данных содержит непрерывный или дискретный характеристический сигнал, содержащий физиологическую информацию, отражающую движение желаемого объекта, подлежащее обнаружению и использованию с тем, чтобы извлекать по меньшей мере один по меньшей мере частично периодический показатель жизнедеятельности, представляющий интерес.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в том, чтобы предоставить усовершенствованное устройство и соответствующий усовершенствованный способ определения сигнала объема дыхания от субъекта, который удобнее для пользователя и который можно реализовать с малой технической нагрузкой.
По одному из аспектов настоящего изобретения предоставлено устройство для определения сигнала объема дыхания от субъекта, которое содержит:
блок обработки для приема данных изображения, определяемых в поле зрения, и для определения переменного сигнала, содержащего информацию о показателе жизнедеятельности субъекта, по принятым данным изображения,
блок анализа для определения по меньшей мере одного характеристического параметра, соответствующего параметру дыхания субъекта, на основании переменного сигнала,
калибровочный блок для определения значения калибровки на основании дыхательного объема, измеряемого во время вдоха и/или выдоха субъекта с помощью потока воздуха или измерения объема воздуха, и
вычислительный блок для вычисления объема дыхания субъекта на основании значения калибровки и по меньшей мере одного характеристического параметра.
По другому аспекту настоящего изобретения предоставлен способ определения сигнала объема дыхания от субъекта, включающий в себя следующие этапы:
прием данных изображения, определяемых в поле зрения,
определение переменного сигнала, который содержит информацию о показателе жизнедеятельности субъекта, по принятым данным изображения,
определение по меньшей мере одного характеристического параметра, соответствующего параметру дыхания субъекта на основании переменного сигнала,
определение значения калибровки на основании дыхательного объема, измеряемого во время вдоха и/или выдоха субъекта с помощью потока воздуха или измерения объема воздуха и
вычисление объема дыхания субъекта на основании значения калибровки и характеристического параметра.
В других дополнительных аспектах по настоящему изобретению предоставлена компьютерная программа, которая содержит средства программного кода для управления компьютером для того, чтобы осуществлять этапы способа обработки, когда указанную компьютерную программу осуществляют на компьютере, а также постоянная машиночитаемая среда записи, которая хранит в себе компьютерный программный продукт, который при исполнении процессором вызывает осуществление способа, описанного в настоящем документе.
Предпочтительные варианты осуществления изобретения определяют в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ имеет схожие и/или идентичные предпочтительные варианты осуществления в качестве заявленного устройства и как определено в зависимых пунктах формулы изобретения.
Настоящее изобретение основано на идее о том, чтобы определять переменный сигнал посредством удаленного измерения на основании данных изображения, определяемых в поле зрения, и калибровать измерение с помощью потока воздуха или измерение объема воздуха и коррелировать два измерения для того, чтобы вычислять абсолютный объем дыхания субъекта на основании удаленного измерения. Поскольку удаленное измерение калибруют с помощью потока воздуха или измерения объема воздуха, удаленное измерение можно использовать для определения абсолютного объема дыхания с тем, чтобы непрерывное или частое удаленное измерение объема дыхания было возможно без необходимости дополнительных маркеров или трехмерного измерения субъекта.
Таким образом, удаленное измерение объема дыхания субъекта можно обеспечивать при малой технической нагрузке, что удобно для пользователя.
В предпочтительном варианте осуществления блок обработки соединен с блоком обнаружения изображения для предоставления данных изображения из поля зрения. Это представляет собой простую возможность для того, чтобы определять информацию о дыхании субъекта бесконтактно и с малой технической нагрузкой.
В предпочтительном варианте осуществления переменный сигнал определяют на основании паттерна движения, который получают из данных изображения. Это представляет собой надежную возможность для того, чтобы определять информацию о дыхании субъекта, поскольку обнаруживаемое движение субъекта имеет соответствие с частотой дыхания.
Согласно предпочтительному варианту осуществления, переменный сигнал определяют на основании векторов движения, определяемых по паттерну движения. Это представляет собой простое решение для того, чтобы определять переменные сигналы, соответствующие дыханию субъекта с высокой воспроизводимостью и малой технической нагрузкой.
Согласно предпочтительному варианту осуществления, блок обработки содержит блок выбора для выбора по меньшей мере одной области в поле зрения на основании множества переменных сигналов, определяемых в поле зрения. Это представляет собой простое решение для того, чтобы определять область, представляющую интерес, в поле зрения на основании движения субъекта в поле зрения для того, чтобы увеличивать надежность измерения, и для того, чтобы снижать вероятность неправильных измерений.
Предпочтительно адаптировать блок анализа для того, чтобы определять спектральный параметр переменных сигналов для выбора по меньшей мере одной области. Это представляет собой возможность для увеличения надежности, поскольку спектр переменного сигнала используют для того, чтобы так выбирать область, представляющую интерес, что возмущающие сигналы и шум не учитывают при выборе области, представляющей интерес.
Согласно дополнительному предпочтительному варианту осуществления, блок анализа выполнен с возможностью определять характеристический параметр на основании переменного сигнала, определяемого по выбранной области. Это представляет собой возможность для дополнительного увеличения надежности обнаружения сигнала дыхания, поскольку переменный сигнал определяют по выбранной области в качестве области, представляющей интерес.
По меньшей мере один характеристический параметр определяют на основании множества переменных сигналов, определяемых в различных областях поля зрения. Это представляет собой возможность для увеличения надежности определения характеристического параметра, поскольку можно увеличивать силу сигнала показателя жизнедеятельности и можно снижать шум.
Переменные сигналы, которые определяют по различным областям, взвешивают с помощью весового коэффициента. Это представляет собой возможность учитывать переменные сигналы из различных областей по-разному на основании качества сигнала.
Кроме того, предпочтительно характеристический параметр представляет собой амплитуду переменного сигнала. Это представляет собой возможность коррелировать движение субъекта, соответствующее дыханию, с объемом дыхания, измеряемым посредством калибровочного блока, чтобы определять абсолютный объем дыхания непрерывно после начальной калибровки.
Кроме того, предпочтительно калибровочный блок выполнен с возможностью измерять дыхательный объем субъекта во время цикла вдоха или выдоха. Это представляет собой возможность для того, чтобы определять полный дыхательный объем между полным выдохом и полным вдохом субъекта.
Кроме того, предпочтительно калибровочный блок содержит устройство для измерения потока воздуха для измерения дыхательного объема. Это представляет собой простую возможность для того, чтобы калибровать измерение при малой технической нагрузке, поскольку спирометр, основанный на измерении потока воздуха, может точно определять объем воздуха при малой технической нагрузке.
В предпочтительном варианте осуществления калибровочный блок выполнен с возможностью коррелировать характеристический параметр и измеряемый дыхательный объем для того, чтобы определять значение калибровки и для того, чтобы вычислять объем дыхания. Это представляет собой четкую возможность для того, чтобы комбинировать два измерения дыхания субъекта и чтобы определять значение калибровки для того, чтобы обеспечивать непрерывное измерение дыхательного объема.
В предпочтительном варианте осуществления калибровочный блок выполнен с возможностью измерять дыхательный объем субъекта во время цикла вдоха и выдоха, где максимальный объем вдоха коррелирует с соответствующим максимумом характеристического параметра и минимальный объем вдоха коррелирует с соответствующим минимумом характеристического параметра для того, чтобы определять значение калибровки, и где характеристический параметр масштабируют в соответствии с определяемым значением калибровки для того, чтобы непрерывно вычислять объем дыхания. Это представляет собой возможность для того, чтобы коррелировать два различных измерения при малой технической нагрузке для того, чтобы определять объем дыхания удаленно после калибровки.
В предпочтительном варианте осуществления вычислительный блок выполнен с возможностью вычислять объем дыхания в течение дыхательных циклов после определения значения калибровки. Это представляет собой простую возможность для того, чтобы определять объем дыхания полностью бесконтактно после выполнения калибровки один раз в начале измерения.
Как указано выше, настоящее изобретение основано на идее определять объем дыхания на основании двух различных измерений. Одно измерение основано на потоке воздуха для того, чтобы калибровать измерение и второе измерение представляет собой бесконтактное измерение на основании принимаемого излучения от субъекта, где два измерения коррелируют для того, чтобы определять часто и/или непрерывно объем дыхания субъекта на основании удаленного измерения. Поскольку результаты двух различных измерений используются устройством, и их коррелируют с помощью устройства, объем дыхания можно определять при малой технической нагрузке и с большим комфортом для пациента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения станут очевидны и разъяснены на основе вариантов осуществления, описанных далее в настоящем документе. Далее на чертежах:
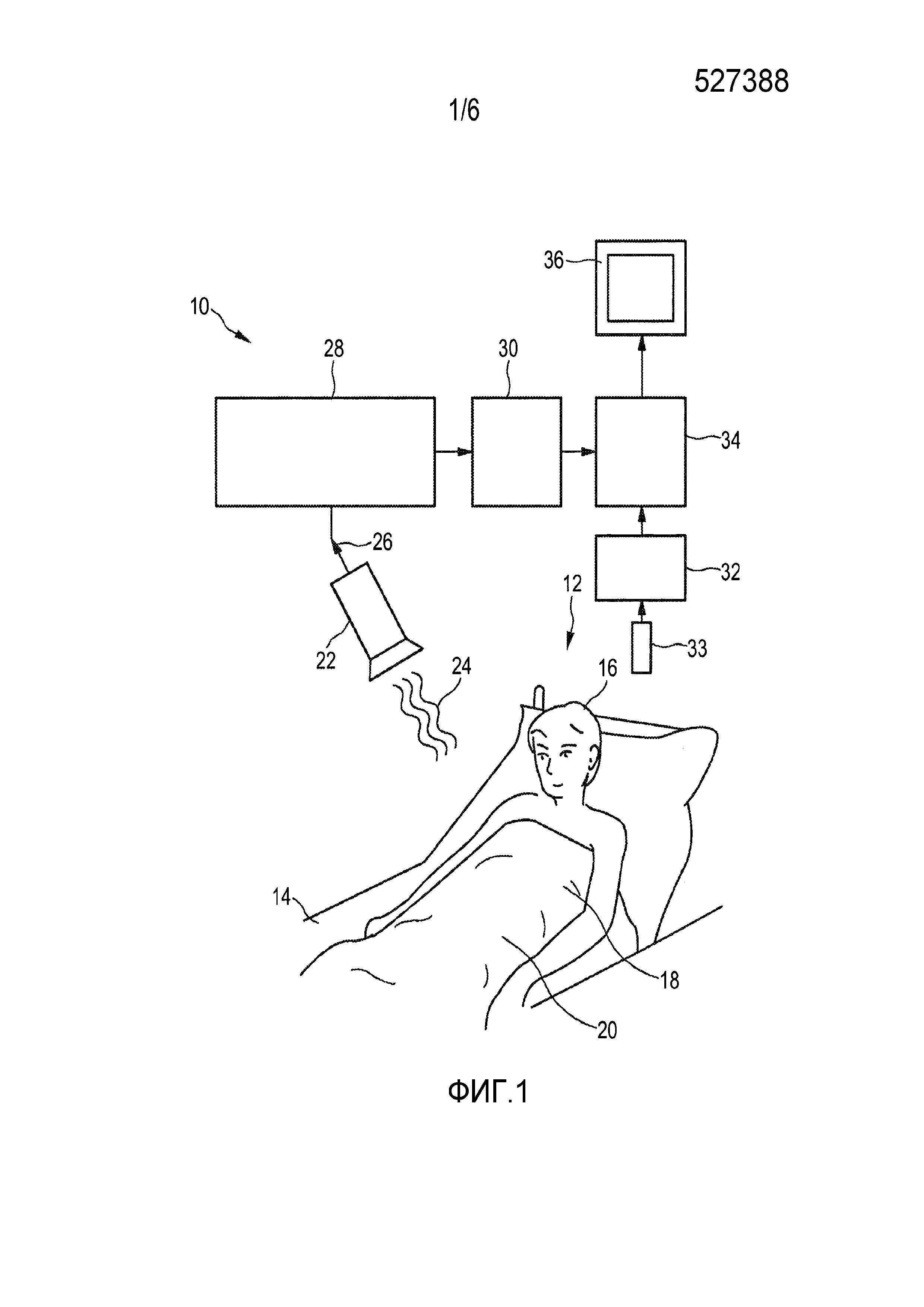
на фиг. 1 представлена схематическая иллюстрация общей схемы устройства для определения сигнала объема дыхания субъекта,
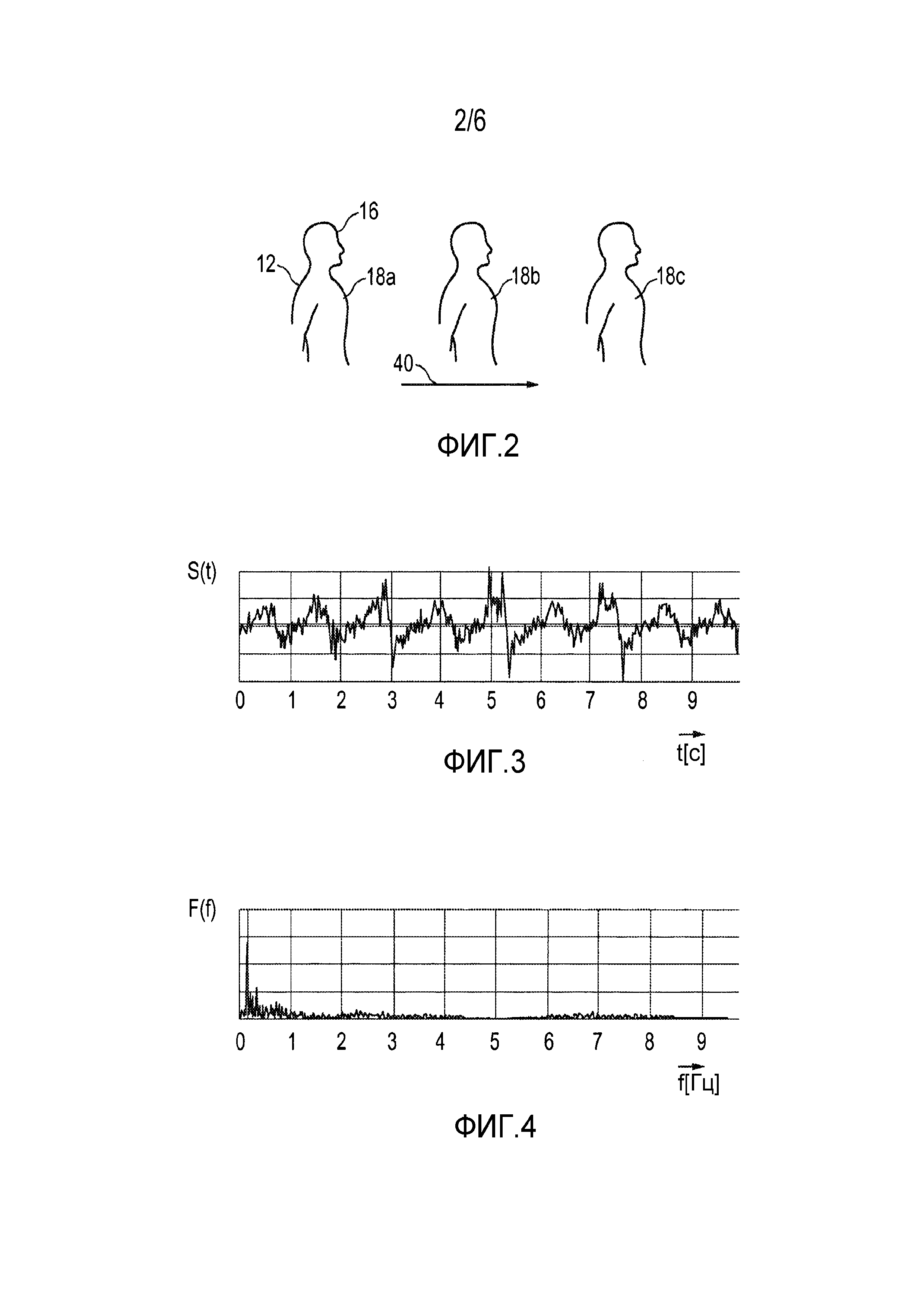
на фиг. 2 представлена схематическая иллюстрация движения субъекта, указывающего на сигнал дыхания,
на фиг. 3 представлена временная диаграмма переменного сигнала, получаемого от субъекта, соответствующего сигналу дыхания,
на фиг. 4 представлен частотный спектр переменного сигнала, представленного на фиг. 3,
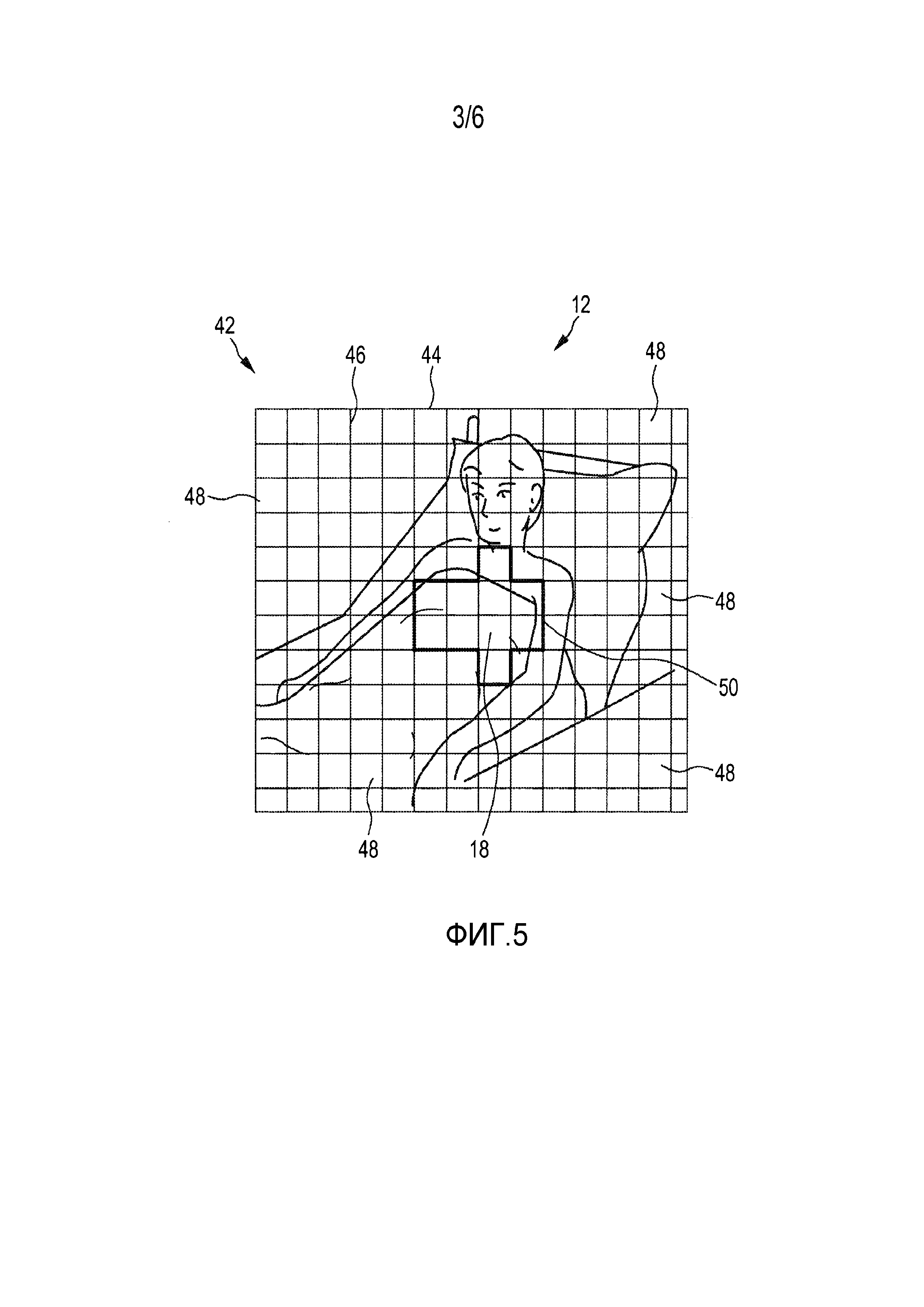
на фиг. 5 представлено схематическое изображение для иллюстрирования выбора области, представляющей интерес, в поле зрения для определения сигнала дыхания,
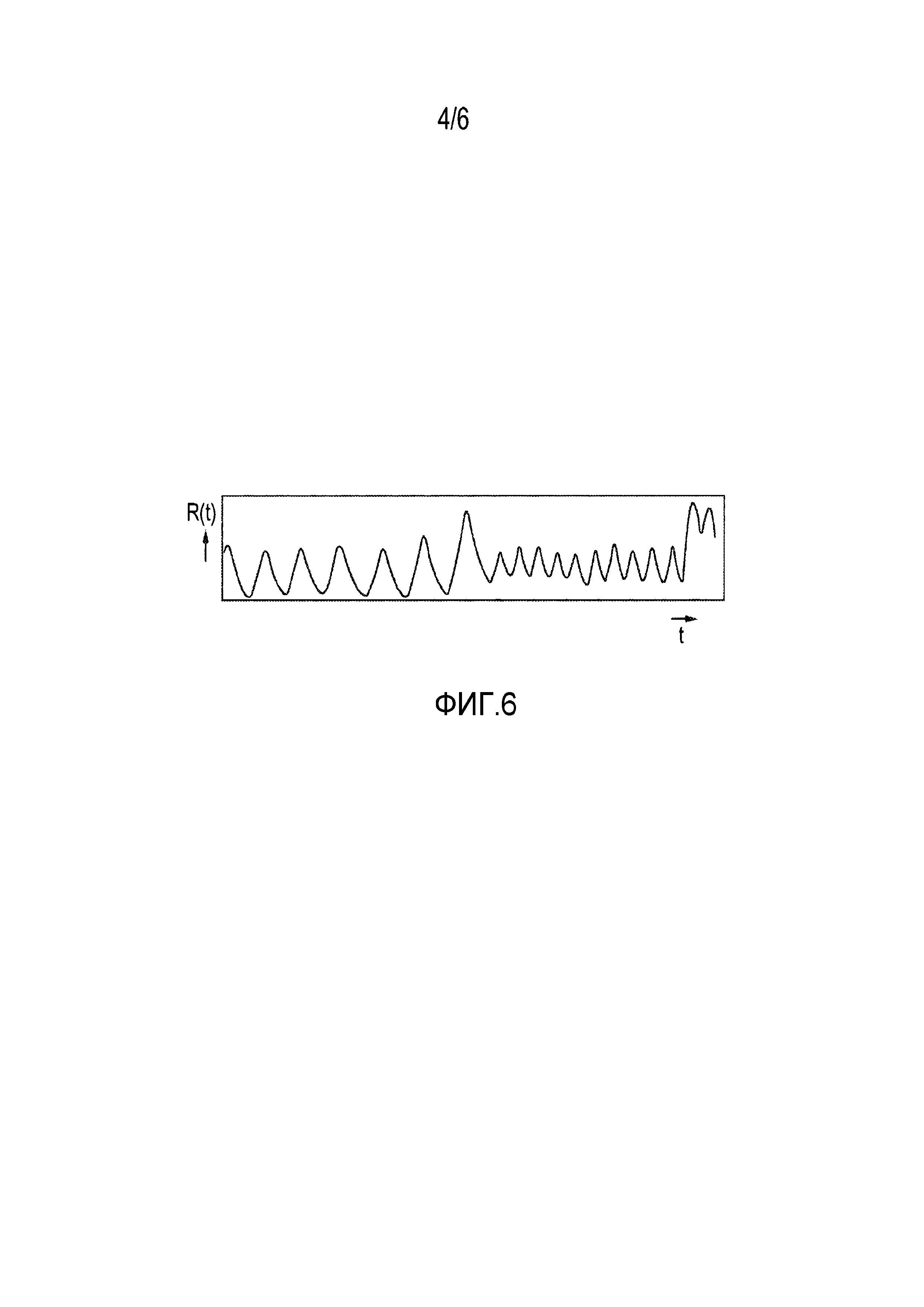
на фиг. 6 представлена схематическая временная диаграмма сигнала дыхания, получаемого из данных изображения в поле зрения,
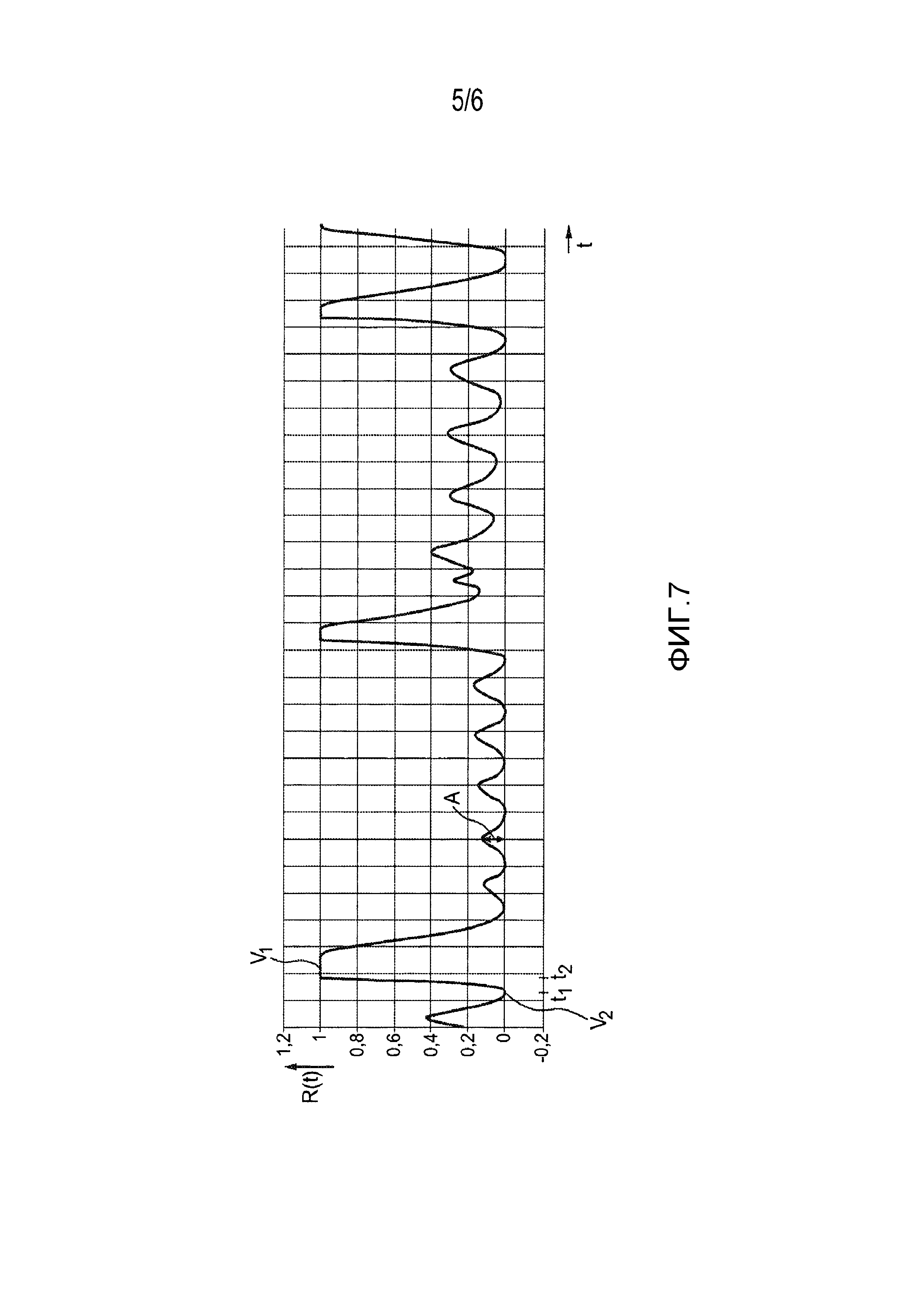
на фиг. 7 представлена временная диаграмма сигнала дыхания и корреляция с калибровочным измерением объема дыхания, и
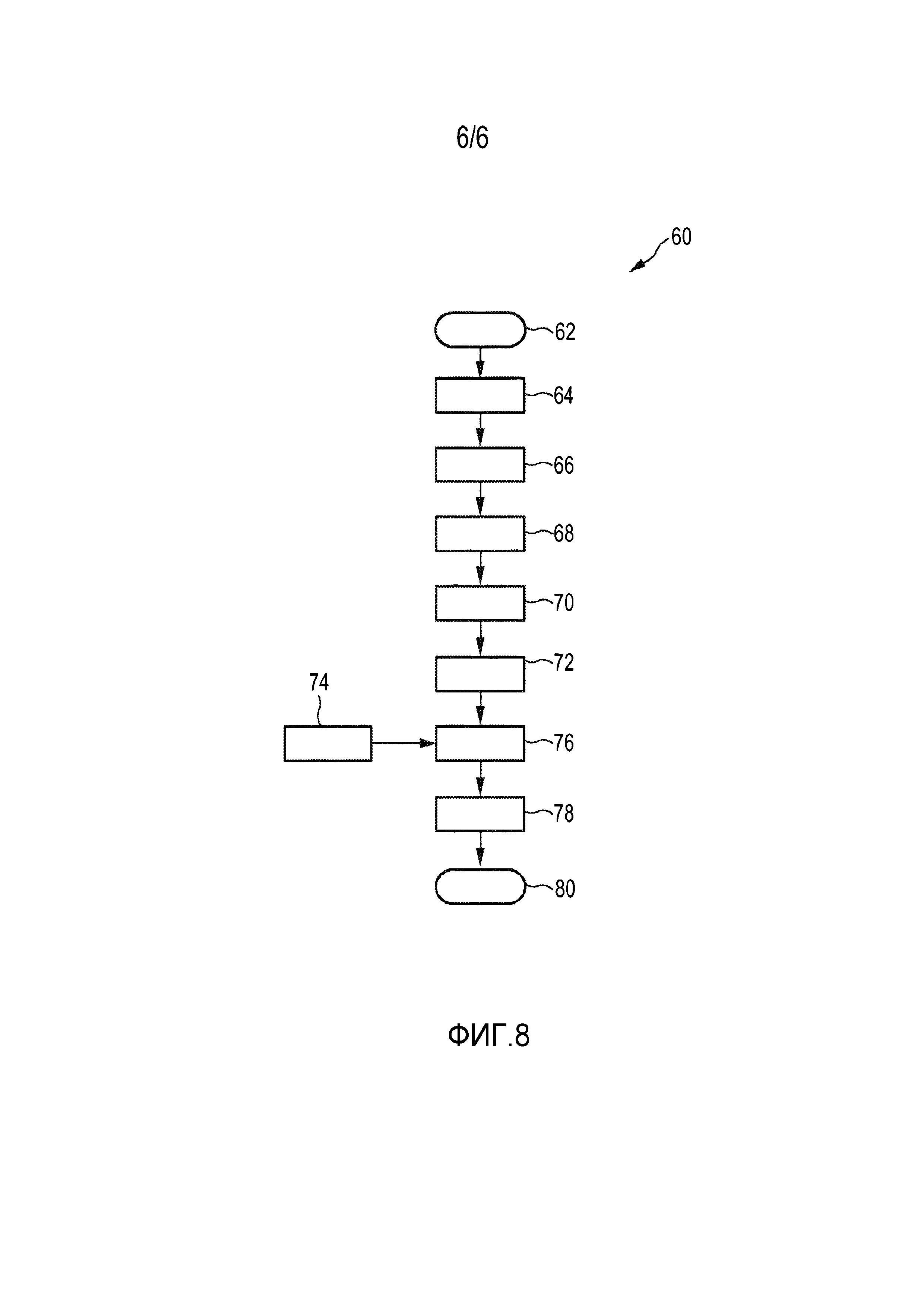
на фиг. 8 представлена блочная диаграмма, которая представляет этапы варианта осуществления способа определения сигнала объема дыхания субъекта.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 представлен схематический чертеж устройства, в целом обозначаемого 10, для определения сигнала объема дыхания субъекта 12. Субъект 12, например, пациент, находящийся в кровати, покоится на опоре 14. Голова 16 субъекта обычно является непоказательной частью в отношении дыхания субъекта, где грудная клетка 18 представляет собой показательную часть в отношении дыхания субъекта 12. Основная проблема для обыкновенной ситуации, представленной на фиг. 1, состоит в том, что объем дыхания не может быть измерен удаленно или бесконтактно при малой технической нагрузке. Обычно обнаруживают только частоту дыхания или частоту сердечных сокращений с помощью систем камер или удаленных систем в целом.
Устройство 10 содержит устройство 22 обнаружения изображения, например, монохроматическая камера, которую можно использовать для регистрации кадров изображения субъекта 12. Кадры изображения можно получать из электромагнитного излучения 24, испускаемого или отражаемого субъектом 12. Для извлечения информации об изображении из данных 26 изображения, например, последовательности кадров изображения, данные 26 изображения передают в блок 28 обработки изображения. Монохроматическая камера 22 предоставляет двухмерное изображение или данные 26 изображения в блок 28 обработки изображения.
Устройство 22 обнаружения изображения выполнен с возможностью захватывать изображения, относящиеся по меньшей мере к спектральному компоненту электромагнитного излучения 24. Устройство 22 обнаружения изображения может предоставлять непрерывные данные изображения или дискретизировать последовательность кадров изображения, захватываемых в поле зрения, содержащем субъект 12, подлежащий измерению.
Блок 28 обработки изображения выполнен с возможностью принимать данные 26 изображения от устройства 22 обнаружения изображения, для того, чтобы оценивать данные 26 изображения в целом, и для того, чтобы обнаруживать область субъекта 12, представляющую интерес, т.е. грудную клетку 18, в качестве показательной части в отношении дыхания субъекта 12. Для того чтобы обнаруживать область, представляющую интерес, например, грудную клетку 18, блок 28 обработки изображения выполнен с возможностью делить захватываемые изображения на секции или области поля зрения и оценивать секции изображения отдельно для того, чтобы определять область, представляющую интерес. Блок 28 обработки изображения делит захватываемые изображения на секции изображения и обнаруживает векторы движения на различные секции, соответствующие движению объекта в поле зрения, содержащие движение грудной клетки 18 или области 18 грудной клетки субъекта 12 в качестве показательной части в отношении дыхания. Векторы движения определяют посредством обнаружения паттерна в секциях изображения или посредством обнаружения краев в секциях изображения. Способ обнаружения краев или паттерна и получения векторов движения из захватываемых кадров изображения, например, раскрыт в WO 2012/140531 A1.
Блок 28 обработки изображения определяет переменные сигналы от векторов движения и определяет спектральный параметр каждого из переменных сигналов с помощью блока частотного анализа, содержащегося в блоке 28 обработки изображения, как в дальнейшем описано в подробностях. Спектральный параметр каждой из секций данных 26 изображения анализируют с помощью блока выбора, который представляет собой часть блока 28 обработки изображения. Блок выбора выбирает те секции данных изображения, из которых извлекают переменный сигнал, который предположительно соответствует сигналу дыхания. Блок выбора выбирает секции на основании соответствующего спектрального параметра. Спектральный параметр представляет собой частотный спектр или спектральное распределение энергии переменного сигнала. Поскольку сигнал дыхания субъекта 12 имеет характеристическое спектральное распределение энергии или характеристическую частоту, блок выбора может выбирать секцию, которая содержит сигнал дыхания субъекта 12 и, следовательно, блок 10 выбора идентифицирует грудную клетку 18 или область 18 грудной клетки субъекта 12 в данных 26 изображения для определения сигнала дыхания.
Блок выбора определяет весовой коэффициент для каждой из различных секций изображения в зависимости от частотного анализа, как описано в дальнейшем.
Блок 28 обработки изображения соединяют с блоком 30 анализа, и он предоставляет переменный сигнал блоку 30 анализа для определения дыхательного сигнала, соответствующего дыханию субъекта 12. Блок 30 анализа принимает переменные сигналы от других секций изображения и соответствующие весовые коэффициенты для различных секций изображения от блока 28 обработки изображения и вычисляет дыхательный сигнал на основании переменных сигналов и весовых коэффициентов. Таким образом, дыхательный сигнал вычисляют на основании данных 26 изображения и определяют полностью бесконтактно. Блок 30 анализа определяет по меньшей мере один характеристический параметр дыхательного сигнала, например, амплитуду дыхательного сигнала и/или максимальное и минимальное значение дыхательного сигнала для того, чтобы определять объем дыхания, как описано далее.
Устройство 10 дополнительно содержит калибровочный блок 32 для калибровки измерения объема дыхания устройством 10. Калибровочный блок 32 соединяют со спирометром 33, который измеряет объем дыхания субъекта посредством измерения потока воздуха во время вдоха и выдоха субъекта 12. Для калибровки устройства 10 и соответствующего удаленного измерения дыхания субъекта просят выполнить цикл полного выдоха и полного вдоха для того, чтобы обнаруживать амплитуду сигнала дыхания для полного диапазона дыхания, который возможен для субъекта 12. Во время этого полного цикла выдоха и вдоха объем воздуха, вдыхаемый и выдыхаемый субъектом 12, измеряют посредством спирометра 33, тогда как устройство 22 обнаружения изображения захватывает данные 26 изображения субъекта 12, т.е. из области, представляющей интерес, которая определена посредством блока 28 обработки изображения, и где блок 30 анализа определяет дыхательный сигнал в удаленном измерении. Таким образом, во время калибровки посредством калибровочного блока 32, объем дыхания измеряют посредством спирометра 33 и дыхательный сигнал определяют удаленно посредством устройства 22 обнаружения изображения, блока 28 обработки изображения и блок 30 анализа для того, чтобы оценивать абсолютный дыхательный объем для дыхательного сигнала. Дыхательный сигнал, определяемый посредством блока 30 анализа, предоставляют вычислительному блоку 34. Измеряемый объем дыхания, который измеряют посредством спирометра 33, направляют с помощью калибровочного блока 32 в качестве значения калибровки в вычислительный блок 34 для того, чтобы коррелировать дыхательный сигнал или характеристический параметр из удаленного измерения и абсолютный дыхательный объем, измеряемый посредством спирометра 33.
Поскольку по меньшей мере максимум и минимум дыхательного объема субъекта 12 измеряют посредством спирометра 33 и коррелируют с дыхательным сигналом или характеристическим параметром из удаленного измерения, абсолютный дыхательный объем можно вычислять дополнительно на основании значения калибровки и дыхательного сигнала, получаемого из удаленного измерения, чтобы обеспечивать частое или непрерывное измерение дыхательного объема субъекта 12 без измерения спирометром. Для того чтобы непрерывно определять объем дыхания, амплитуду и/или максимальное и минимальное значение дыхательного сигнала линейно масштабируют и интерполируют между максимальным и минимальным значениями калибровки измерения спирометром. Таким образом, после калибровки, объем дыхания можно вычислять только по бесконтактному измерению.
Вычисленный так дыхательный объем можно предоставлять дисплею 36 для того, чтобы отображать измеряемый дыхательный объем непрерывно или часто.
Таким образом, после начальной калибровки посредством калибровочного блока 32 и спирометра 33, абсолютный дыхательный объем субъекта 12 в целом можно определять удаленно посредством устройства 10.
На фиг. 2 представлена схематическая иллюстрация субъекта 12 для того, чтобы описать удаленное измерение дыхания субъекта 12. Субъект 12 выполняет характеристическое движение показательной части 18 (грудной клетки 18) из-за дыхания. При дыхание расширении и сжатие легких вызывает легкое движение характеристических частей живых существ, например, поднятие и опускание грудной клетки 18. Также абдоминальное дыхание может вызывать характеристическое движение соответствующих частей тела 12 субъекта. По меньшей мере частично периодические паттерны движения, содержащиеся в физиологических процессах, могут возникать у многих живых существ, в частности, у человека или животных.
С течением времени, как указывает стрелка 40, показательная часть 18 перемещается между сжатым положением, которое указано с помощью номеров позиции 18a, 18c, и удаленным положением, обозначенным 18b. По существу, на основании этого паттерна движения, например, частоту дыхания или вариабельность частоты дыхания можно оценивать посредством обнаружения паттерна или краев в последовательности захватываемых изображений. Хотя показательная часть 18 пульсирует с течением времени, голова 16 в качестве непоказательной части остается по существу неподвижной.
Определенно голова 16 также выполняет различные движения с течением времени. Однако эти движения не соответствуют периодической пульсации грудной клетки 18 и их можно отличать посредством частотного анализа.
На фиг. 3 представлена временная диаграмма переменного сигнала, получаемого из паттерна движения и/или из векторов движения различных секций изображения, которые можно определять, например, на основании обнаружения кадра или краев в соответствующей секции изображения. Переменный сигнал в целом обозначают S(t). Переменный сигнал S в этом конкретном случае соответствует движению грудной клетки 18 субъекта 12, получаемому из секции изображения, соответствующей данным изображения, принятым от соответствующей показательной части 18. Переменный сигнал S демонстрирует характеристическую вариацию, соответствующую движению грудной клетки 18, т.е. дыханию субъекта 12. Переменный сигнал S также показывает высокочастотный шум, наложенный на дыхание.
Переменные сигналы S получают от каждой из секций изображения в поле зрения, где множество секций изображения содержат информацию о показателе жизнедеятельности, таком как частота дыхания, и множество секций изображения может содержать возмущающие сигналы, которые не связаны с информацией о показателе жизнедеятельности субъекта 12 или другими переменными сигналами, которые содержат главным образом высокочастотный шум. Для того чтобы идентифицировать эти секции, изображения, из которого можно извлекать информацию о показателе жизнедеятельности, блок 28 обработки изображения содержит устройство частотного анализа для того, чтобы осуществлять частотный анализ переменных сигналов. Частотный анализ предпочтительно осуществляют посредством фильтрации переменных сигналов S и/или посредством выполнения преобразования Фурье, в частности, быстрого преобразования Фурье (FFT), переменного сигнала S. Из переменного сигнала извлекают частотный спектр, чтобы идентифицировать секцию изображения, которая содержит информацию о показателе жизнедеятельности, соответствующую дыханию субъекта 12, как описано далее.
На фиг. 4 представлен частотный спектр переменного сигнала S, показанный на фиг. 3, в целом обозначаемый F(f). Частотный спектр F демонстрирует большой частотный компонент в полосе низких частот, в этом конкретном случае между 0 и 1 Гц, что соответствует частоте дыхания взрослого человека, которая обычно не выше 1 Гц, т.е. 60 вдохов в минуту. Частотные компоненты выше предварительно определяемой полосы частот, например, 1 Гц для взрослых и 2 Гц для детей, обычно представляют собой возмущающие сигналы в данных 26 изображения или соответствуют шуму переменного сигнала S. Для того чтобы охарактеризовать качество переменного сигнала S, определяют спектральную энергию переменного сигнала S и определяют секцию изображения в качестве секции изображения, содержащей информацию о показателе жизнедеятельности, если спектральная энергия переменного сигнала S в предварительно определяемой полосе частот превышает предварительно определяемый пороговый уровень или превышает процентную долю спектральной энергии по сравнению со второй полосой частот, например, весь частотный спектр. Например, если спектральная энергия между 0 и 1 или 2 Гц больше, чем предварительно определяемый пороговый уровень, например, больше 50% всей спектральной энергии переменного сигнала S или предварительно определяемого диапазона спектра, например, 2…3 Гц, 3…4 Гц, … На основании спектральной энергии секции изображения оценивают для того, чтобы выбирать секции изображения в поле зрения и определять область, представляющую интерес, как описано далее.
На фиг. 5 представлено схематическое изображение в поле зрения для объяснения обнаружения дыхательного сигнала от субъекта на основании обнаруживаемых данных 26 изображения. Поле зрения, обнаруживаемое посредством устройства 22 обнаружения изображения, которое представлено на фиг. 5, в целом обозначают 42. Кадр 44 изображения, представляющий поле 42 зрения, которое захватывают посредством устройства 22 обнаружения изображения, демонстрирует субъект 12, который в этом случае является человеком, подлежащим измерению. В кадре 44 изображения сетка 46 делит кадр 44 изображения на различные части и определяет секции 48 изображения для того, чтобы различать различные области в поле 42 зрения и определять различные векторы движения в поле 42 зрения. Для того, чтобы определять область, представляющую интерес, т.е. грудную клетку 18 субъекта 12, паттерн движения извлекают из каждой из секций 48 изображения кадра 44 изображения и переменные сигналы S определяют по векторам движения, определяемым в паттерне движения каждой из секций 48 изображения, как описано выше. Векторы движения определяют посредством обнаружения паттерна или обнаружения краев внутри различных секций изображения. На основании частотного анализа, как описано выше, определяют, соответствует ли паттерн движения различных секций изображения дыхательному сигналу субъекта 12 в поле 42 зрения или паттерн движения представляет собой возмущающие сигналы или шум. Определение того, содержит ли паттерн движения дыхательные сигналы или нет, осуществляют, как описано выше, на основании спектрального параметра и/или спектральной энергии и того, составляет ли спектральная энергия в полосе частот больше, чем предварительно определяемая процентная доля от всей спектральной энергии соответствующего переменного сигнала. На основании этих данных, которые определяют для каждой из секций 48 изображения, блок выбора выбирает те секции изображения, которые содержат дыхательный сигнал, и объединяет эти выбранные секции 48 изображения в область, представляющую интерес, которая на фиг. 5 в целом обозначена 50.
На основании переменных сигналов S, которые получают из секций 48 изображения области 50, представляющей интерес, блок 30 анализа определяет дыхательный сигнал. Блок 28 обработки изображения определяет весовой коэффициент для каждой из выбранных секций 48 изображения области 50, представляющей интерес, чтобы взвешивать переменные сигналы S различных секций 48 на основании качества сигнала. Весовой коэффициент можно вычислять на основании частоты того, как часто соответствующую секцию 48 изображения выбирает блок выбора. Другими словами, переменные сигналы от тех секций 48 изображения, которые выбирают более часто в качестве выбранной секции 48 изображения, получают больше веса, а секции изображения, которые выбирают менее часто, получают меньший вес при вычислении дыхательного сигнала. По различным переменным сигналам блок 30 анализа определяет дыхательный сигнал в качестве отдельного переменного сигнала.
На фиг. 6 представлена временная диаграмма дыхательного сигнала, определяемого посредством блока 30 анализа и в целом обозначаемого R(t). Дыхательный сигнал R(t) извлекают из движения грудной клетки 18 субъекта 12. По определяемому так дыхательному сигналу R можно определять частоту дыхания субъекта 12. Если значения калибровки калибровочного блока 32 коррелируют с дыхательным сигналом, определяемым посредством блока 30 анализа, абсолютный объем дыхания субъекта 12 можно непрерывно вычислять посредством вычислительного блока 34, как описано далее.
На фиг. 7 представлена временная диаграмма дыхательного сигнала R(t) во время калибровки посредством калибровочного блока 32. Сначала субъекта 12 просят осуществлять полный цикл выдоха и вдоха, в котором субъект 12 сначала полностью выдыхает, как показано в t1, после чего следует полный вдох, представленный в t2, чтобы определять соответствующие значения калибровки.
Объем V1 воздуха, соответствующий полному выдоху в t1, который для взрослого составляет, например, 500 мл, измеряют и определяют как 0 объем, и объема V2 воздуха при полном вдохе, который для взрослого составляет, например, 3000 мл, измеряют и определяют как 1, как показано на фиг. 7. Эти измеряемые значения V1, V2 объема дыхания используют в качестве значений калибровки. Объем V1, V2 дыхания между 1 и 0 линейно масштабируют с тем, чтобы амплитуду A дыхательного сигнала R, определяемого удаленно посредством блока 30 анализа, можно было использовать для того, чтобы вычислять абсолютный дыхательный объем субъекта 12. Масштаб, представленный на фиг. 7, можно использовать вместе с полным объемом воздуха при дыхании для того, чтобы определять абсолютный объем дыхания для каждого из следующих циклов вдоха и выдоха, определяемых удаленно посредством устройства 10. Таким образом, объем дыхания субъекта 12 можно удаленно определять непрерывно или часто при малой технической нагрузке, что комфортно для пользователя.
После выполнения калибровки субъект 12 может перемещаться относительно камеры 22, что ведет к изменению переменных сигналов S, принимаемых от грудной клетки 18 в качестве показательной части по сравнению с изображениями, используемыми для калибровки. Субъект 12 может перемещаться перпендикулярно направлению наблюдения камеры или может перемещаться параллельно направлению наблюдения камеры, т.е. может уменьшать или увеличивать расстояние до камеры 22. В обоих случаях движение субъекта 12 следует обнаруживать и рассматривать для оценки изображения и для определения дыхательного сигнала R. Чтобы учитывать перпендикулярное движение, обнаруживают определенные признаки на изображении, такие как контуры, или узор на субъекте 12, например, одежда или кнопки, и движение субъекта 12 можно обнаруживать посредством идентификации и слежения за этими контурами или узором в поле 42 зрения. На основании движения этих узоров в поле зрения, область 50, представляющую интерес, адаптируют соответственно с тем, чтобы повторная калибровка не требовалась после перпендикулярного движения субъекта 12. Если субъект 12 двигается параллельно направлению наблюдения камеры 22, область 50, представляющую интерес, следует масштабировать для того, чтобы определять правильные переменные сигналы и истинные сигналы объема дыхания от субъекта 12. Масштабирование осуществляют посредством обнаружения контуров субъекта 12 с тем, чтобы увеличение или уменьшение всего размера контуров субъекта 12 вело к обнаружению движения субъекта 12 параллельно направлению наблюдения камеры 22. Измеряемые переменные сигналы S масштабируют соответственно для того, чтобы корректировать удаленное измерение.
Таким образом, повторная калибровка не нужна, если субъект 12 двигается в пределах поля 42 зрения. Повторная калибровка необходима, только если субъект 12 поворачивается так, что грудная клетка 18 в качестве показательной части только частично видна камере 22.
На фиг. 8 представлена блочная диаграмма, которая иллюстрирует этапы способа обнаружения сигнала объема дыхания субъекта 12. Способ в целом обозначают 60. Способ 60 начинается с этапа 62. На этапе 64, кадр 44 изображения обнаруживают посредством устройства 22 обнаружения изображения. На этапе 66 кадр 44 изображения или данные 26 изображения принимают посредством блока 28 обработки изображения и оценивают посредством блока 28 обработки изображения посредством обнаружения паттерна или обнаружения краев, и определяют векторы движения для каждой из секций 48 изображения, как описано выше. В зависимости от векторов движения, соответствующий переменный сигнал S вычисляют для каждой из секций 48 изображения. На основании переменных сигналов S, анализируемых посредством блока 28 обработки изображения, область 50, представляющую интерес, определяют на этапе 68.
На этапе 70, блок 30 анализа анализирует переменные сигналы S. На этапе 72 определяют дыхательный сигнал R и вычисляют амплитуду A сигнала дыхания R.
На этапе 74 калибровочный блок 32 измеряет объем дыхания субъекта 12 посредством спирометра 33 и предоставляет значение V1, V2 калибровки или множество значений V1, V2 калибровки вычислительному блоку 34. На этапе 76 объем дыхания определяют на основании значения V1, V2 калибровки и сигнала дыхания R. Это обычно выполняют посредством вычисления амплитуды между локальным минимумом и локальным максимумом сигнала дыхания R в качестве характеристического параметра и корреляции с разностью между максимальным объемом воздуха на выдохе и максимальным объемом воздуха на вдохе в качестве значений V1, V2, калибровки определяемых посредством спирометра 33. Локальные максимумы и минимумы обычно масштабируют с учетом значений калибровки для того, чтобы определять объем дыхания удаленно.
На этапе 78 дыхательный объем отображают посредством дисплея 36. На этапе 80 способ 60 заканчивается.
Таким образом, после калибровки объем дыхания можно определять полностью бесконтактно при малой технической нагрузке.
Хотя изобретение иллюстрировано и подробно описано на чертежах и в приведенном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или примерные и неограничивающие; изобретение не ограничено раскрытыми вариантами осуществления. Специалисты в данной области техники смогут понять и осуществить другие вариации раскрытых вариантов осуществления при практическом осуществлении описываемого в заявке изобретения, изучив чертежи, раскрытие и прилагаемую формулу изобретения.
В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а формы единственного числа не исключают множественного. Один элемент или другой блок может выполнять функции по нескольким пунктам, перечисленным в формуле изобретения. Сам факт того, что определенные средства перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с пользой.
Компьютерную программу можно хранить/распространять на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемой вместе или в качестве части другого аппаратного обеспечения, а также можно распространять в других формах, например, через интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Реферат
Группа изобретений относится к медицине, а именно к мониторингу показателей жизнедеятельности, и может быть использована для определения дыхательного объема субъекта. Принимают данные изображения, обнаруженные в поле зрения. Определяют множество переменных сигналов (S), причем переменные сигналы определяют на основании векторов движения, определяемых по паттерну движения, включая информацию (R) о дыхательном сигнале субъекта, в различных областях поля зрения по данным изображения. Определяют характеристический параметр (А), соответствующий параметру дыхания на основании переменного сигнала (S), соответствующего дыхательному сигналу. Определяют значение (V1, V2) калибровки на основании дыхательного объема, измеряемого во время вдоха и/или выдоха субъекта с помощью измерения потока воздуха или измерения объема воздуха. Причем максимальный объем (V1) вдоха коррелируют с соответствующим максимумом характеристического параметра (А). Минимальный объем (V2) вдоха коррелируют с соответствующим минимумом характеристического параметра (А) для того, чтобы определять значение (V1, V2) калибровки. Причем характеристический параметр (А) масштабируют согласно определяемому значению (V1, V2) калибровки для того, чтобы непрерывно вычислять объем дыхания. Вычисляют объем дыхания субъекта на основании значения (V1, V2) калибровки и, по меньшей мере, одного характеристического параметра (А). Причем множество переменных сигналов (S) взвешивают с помощью весового коэффициента, соответствующего области поля зрения. Устройство для определения дыхательного объема субъекта содержит блок обработки для приема данных изображения, и для определения множества переменных сигналов (S), включая информацию (R) о дыхательном сигнале субъекта. Блок анализа для определения характеристического параметра (А), соответствующего параметру дыхания на основании переменного сигнала (S). Калибровочный блок для определения калибровочных значений максимального объема вдоха (V1) и минимального объема вдоха (V2) на основании дыхательного объема, измеряемого во время вдоха и/или выдоха субъекта. Вычислительный блок для вычисления объема дыхания субъекта на основании значения (V1, V2) калибровки и характеристического параметра (А). Группа изобретений обеспечивает удаленное определение объема дыхания субъекта, где область, представляющую интерес, определяют автоматически и объем дыхания субъекта определяют часто или непрерывно за счет удаленного измерения на основании данных изображения, определяемых в поле зрения, калибровки измерения с помощью измерения потока воздуха или измерения объема воздуха и корреляции этих двух измерений, без необходимости дополнительных маркеров или трехмерного измерения субъекта. 2 н. и 9 з.п. ф-лы, 8 ил.
Комментарии