Блок датчика для контроля поверхности объекта и способ для осуществления этого контроля - RU2186372C2
Код документа: RU2186372C2
Чертежи







Описание
Настоящее изобретение относится к устройству и способу контроля поверхности объекта в соответствии с родовыми понятиями независимых пунктов формулы изобретения.
В связи с контролем поверхности известно сканирование соответствующей поверхности с помощью телекамер на приборах с зарядовой связью или матричных телекамер, а также с помощью лазерных сканеров и анализ значений ахроматических или соответственно цветных изображений средствами обработки изображений.
В случае обработки древесины, например, при изготовлении дверей или окон или при изготовлении фанеры необходимо исследовать качество обрабатываемой древесины. При этом необходимо выявить, например, сколы, трещины, выщербленные сучки, выступы или вмятины, выцвет или красную кольцевую гниль древесины, которые делают ее непригодной для дальнейшего использования. Поэтому до сих пор такой контроль древесины выполняется в основном вручную. И, в частности, поэтому до сих пор практически невозможно с помощью средств автоматики отбраковывать древесину, пораженную выцветом или красной кольцевой гнилью. К тому же существует множество технических проблем, связанных с большой глубиной фокусного расстояния и одновременно высоким разрешением, которые необходимо решать для осуществления данной технологии, а также со скоростью транспортировки древесины. Поэтому необходимо использовать осветительные приборы с очень хорошими характеристиками.
При освещении древесины с помощью лазерного луча наблюдается так называемый эффект рассеяния, который означает, что часть света рассеивается на волокнах древесины и вблизи поверхности как функция распределения локальной плотности. В случае ненарушенной ориентации волокон в пространственном распределении интенсивности диффузно отраженного света проявляется характеристическое распределение плотности диполей, при этом (1/е) - спад функции, интегральная интенсивность, а также реальная структура максимумов излучений зависят от типа материала, в частности от структуры дефекта. Из заявки SE-A-7500465-5 известны способ и устройство с применением гелий-неонового лазера, в котором в целях оценки косвенным образом используется эффект рассеяния.
Из заявки ЕР-0198037 В1 известен способ измерения углов расположения волокна в волокнистом материале, например в дереве, где площадь поверхности материала освещается падающим лучом света и фоточувствительные устройства расположены в пространстве таким образом, что измеряют световой поток, отраженный от освещенной поверхности. Угол расположения волокна измеряется по отношению к трем осям координат, расположенных под прямым углом друг к другу (х, у, z), и всякая точка поверхности материала определяется как точка начала координат. Освещенная поверхность включает в себя точку начала координат и имеет диаметр, который хотя бы в десять раз больше среднего диаметра волокна измеряемой поверхности. Большая часть фоточувствительных устройств расположена таким образом, что обеспечивает оценку угловых азимутальных положений вокруг точки начала максимума интенсивности отраженного света. Кроме того, для того, чтобы находиться в положении, позволяющем выполнить оценку угловых азимутальных положений максимумов интенсивности в каждой точке, определяется число произвольных точек в продольном и поперечном направлениях поверхности материала. С помощью отношения между азимутальным угловым положением максимумов отраженного света и углом расположения волокна для каждой точки измерения рассчитывается соответствующий угол расположения волокна по отношению к каждой из трех осей для того, чтобы показать полную картину углов расположения волокон на измеряемой поверхности волокнистого материала. Этот способ осуществляется с использованием очень сложной установки для того, чтобы, с одной стороны, измерить излучение части луча отраженного света, а с другой стороны, части луча диффузно отраженного света.
В заявке DE-A-19604076.0 предложено устройство контроля поверхности древесины с целью определения характеристик поверхности, в состав которого входит оптоэлектронный датчик, электронное и/или оптическое устройство обработки данных, компьютер, работающий в реальном масштабе времени, при этом древесина может перемещаться относительно датчика, а также дискретный первичный преобразователь положения, который синхронизирует работу оптоэлектронного датчика по скорости перемещения древесины. В состав оптоэлектронного датчика входят цветной лазерный сканер хотя бы с двумя пучками лучей разной длины волны и приемник с двумя каналами, каждый из которых содержит один оптоэлектронный светопринимающий элемент, при этом каналы образованы путем деления отраженного пучка лучей и хотя бы в одном из каналов установлена линза для создания плоскости промежуточного изображения. За линзой, в одном из каналов, установлен делительный фильтр, который модулирует фототок, поступающий на оптоэлектронный светопринимающий элемент, и который установлен на нем независимо от занимаемого им положения. Сигналы, поступающие со светопринимающего элемента одного канала без делительного фильтра преобразуются компьютером в цветное изображение, а сигналы, поступающие из другого канала, фототок которого был смодулирован независимо от положения, преобразуются в изображение профиля поверхности.
Известно, например, из заявки US-4286880 или JP 59040149 А, что поверхности древесины можно исследовать сканированием с использованием светового луча. В этих двух заявках описано вращающееся зеркало, которое расположено в фокусе параболического зеркала; световой луч из источника света попадает на вращающееся зеркало, отражается от него и по линии сканирования падает на поверхность древесины. В заявке US-4286880 предложено усовершенствование рабочей станции для локализации дефектов древесины оператором. Оператор делает отметки в месте дефектов, эти отметки регистрируются оптическим датчиком с выходным сигналом в двоичном коде. Целью изобретения по заявке JP 59040149 А является обнаружение подвижных сучков с помощью несимметрично рассеянного света. Для решения этой проблемы поверхность древесины сканируется световым лучом и световой поток, рассеянный на поверхности древесины, регистрируется двумя детекторами, расположенными симметрично относительно сканирующего луча.
Известен также оптический дистанционный датчик. Работа этого дистанционного датчика, описанного в заявке ЕР-0387521 А2, основана на способе триангуляции. Световой луч с помощью линзы фокусируется на измеряемой поверхности. Эта же линза собирает свет, рассеянный на поверхности, и с помощью вогнутого зеркала фокусирует его на позиционно-чувствительных детекторах. Эти детекторы размещены по отношению к оптической оси таким образом, что высокая светочувствительность гарантируется малым углом падения. В заявке WO 93/11403 описан другой дистанционный датчик. В его состав входит вращающееся многогранное зеркало, которое посылает свет, поступающий от источника, на линию сканирования измеряемой поверхности. Линза сканирования проецирует точечный источник на поверхность. Свет, отраженный от поверхности, поступает в точечный детектор с помощью той же линзы сканирования и другой линзы; такое расположение названо в первой из приведенных в данном абзаце заявок конфокальным. Только когда объект находится в конфокальной плоскости линзы сканирования, а детектор в это время находится в фокальной плоскости другой линзы, на детектор падает световой поток максимальной интенсивности. Поэтому регистрируемая интенсивность светового потока является функцией расстояния от объекта до линзы сканирования. Такое расположение может быть улучшено, если предусмотреть несколько детекторов, которые отправляют сигналы максимума на объекты, которые находятся на разных расстояниях.
В настоящей заявке описаны устройство и способ активного контроля поверхности таких объектов как древесина, керамическая плитка, текстильные изделия или стекло для идентификации характеристик поверхности, с помощью которых может выполняться непрерывный высокоскоростной автоматический контроль поверхности и с помощью которых можно идентифицировать такие характеристики как сколы, трещины, выщербленные сучки, выступы или вмятины, выцвет или красную кольцевую гниль древесины при обязательном использовании эффекта рассеяния. В частности, с помощью проектора Ламберта при скорости перемещения объекта исследования, равной нескольким метрам в секунду, в реальном масштабе времени можно регистрировать одновременно позиционно-зависимое отражение от поверхности, расстояние от поверхности, а также изменение характеристики диффузного отражения в зависимости от положения. Кроме того, конструкция устройства может быть достаточно простой и недорогой в изготовлении.
Поставленная цель достигается путем применения устройства по настоящему изобретению и способа по настоящему изобретению, как определено в независимых пунктах формулы изобретения.
В состав устройства по настоящему изобретению для контроля поверхности объекта с целью идентификации характеристик поверхности входит блок датчика по настоящему изобретению, при этом в предпочтительном варианте изобретения линза может передвигаться относительно блока датчика. Кроме этого. в состав настоящего устройства входит сканирующее устройство, на которое от блока датчика передается световой луч, при этом в состав сканирующего устройства входит вогнутое зеркало, в фокусе которого расположен освещенный блоком датчика светоотражатель, величина угла отражения которого меняется во времени, при этом свет, передаваемый от блока датчика может направляться через объект вдоль линии сканирования, а свет от устройства сканирования, диффузно отраженный от объекта, падает на блок датчика.
В предпочтительном примере устройство по настоящему изобретению отличается наличием параболического зеркала, в фокусе которого расположено вращающееся многогранное зеркало, на которое с помощью телецентрической линзы направляется лазерный луч; линза направляет прямой и обратный лучи по одной и той же оптической оси, при этом параболическое зеркало направляет отклоненный пучок лучей через объект по линии сканирования под постоянным углом наклона к оси симметрии параболического зеркала и направляет диффузно отраженный от объекта пучок лучей назад тем же путем, при этом после отклонения от пути общего пучка он (пучок света) направляется на блок обработки.
Работа устройства основана на эффекте Трэчеда (Tracheid effect) (эффект рассеяния), который происходит при изменении плотности поверхности многих материалов с точечным, преимущественно когерентным освещением. Таким образом, свет проникает в материал через поверхность и направляется внутрь, при этом направление света и его ослабление зависят от структуры материала. С помощью устройства и способа можно использовать эффект рассеяния для оценки аномалий поверхности и выполнить оценку такого типа поверхностных дефектов в реальном масштабе времени.
В предпочтительном варианте изобретения на пути луча между лазером и вращающимся многогранным зеркалом установлено еще одно зеркало с апертурой или отверстием, через которое на вращающееся многогранное зеркало падает световое излучение, это зеркало под определенным углом отклоняет диффузно отраженный пучок света на линзу, в фокальной плоскости которой расположены оптические детекторы и блок электронной обработки, который связан с компьютером, работающим в реальном масштабе времени. За линзой и перед ее фокальной плоскостью путем разбиения одного пучка на два образованы по крайней мере два канала, оценка которых происходит отдельно друг от друга. Для работы устройства очень важно, чтобы все было выполнено с высокой точностью.
Если, например, проверяемым материалом является древесина, то около светового пятна прямого излучения образуются два световых конуса, сориентированных в направлении волокон, которые уменьшаются в соответствии с характеристикой диполя и следуют за световым пятном падающего луча прямого излучения. В соответствии с изменением структуры поверхности и направлением волокон меняются длина, яркость и направление этих двух конусов. Эти яркость, длина и направление зависят от местного дефекта и его формы, а также от направления волокон. В данном изобретении впервые рассматривается использование эффекта рассеяния для визуализации таких дефектов древесины, как выцвет или красная кольцевая гниль, которые регистрируются намного раньше, чем это могло быть обнаружено невооруженным глазом, и могут бать определены только с помощью химического анализа или микроскопического контроля. Точно также на основе эффекта рассеяния визуализируются такие дефекты древесины, как выщербленные сучки, уплотненная древесина или выцвет, которые приводят к снижению качества древесины.
Для того чтобы получить профиль поверхности (трехмерный профиль) с помощью способа триангуляции, на объект со стороны блока датчика должен быть направлен хотя бы один световой луч. Свет, диффузно отраженный от объекта под определенным углом по отношению к падающему лучу, может быть направлен обратно на блок датчика таким образом, что падающий и отраженный световые лучи совпадают в плоскости, параллельной поверхности объекта. В другом варианте несколько лазерных лучей (желательно два) могут направляться с помощью различных зеркал со смещением относительно друг друга таким образом, что отдельные лазерные лучи совпадают в горизонтальной плоскости, в то время как в вертикальной плоскости объекта между ними выдерживается постоянный угол для того, чтобы обеспечить измерение профиля поверхности с помощью диффузно отраженного лазерного луча, направляемого по вертикали позиционно-чувствительным оптоэлектронным приемным элементом, в качестве которого используется высокоскоростной позиционно-чувствительный детектор.
В предпочтительном варианте изобретения хотя бы один лазерный луч сфокусирован на поверхности объекта для того, чтобы с помощью триангуляции получить трехмерный профиль поверхности. С помощью высокоскоростного позиционно-чувствительного светопринимающего элемента измеряется диффузно отраженный лазерный свет, направленный по вертикали.
В способе контроля поверхности объекта с целью идентификации характеристик поверхности в соответствии с настоящим изобретением используется блок датчика по настоящему изобретению, который посылает свет на устройство сканирования, при этом желательно, чтобы объект измерения передвигался относительно этого блока датчика. Передаваемый свет с помощью телецентрического проектора фокусируется на объекте и под определенным углом к объекту сканирования направляется на него по линии сканирования, т.е. относительно вертикальной линии передвигаемой поверхности. Диффузно отраженный от объекта свет направляется обратно в блок датчика по той же траектории, что и луч передаваемого света.
В предпочтительном варианте способа по настоящему изобретению лазерный луч фокусируется на объекте с помощью телецентрического проектора, который направляет передаваемый и получаемый лучи по одной и той же оптической оси, которая служит для его фокусировки на объекте, и направляет его по линии сканирования всегда под постоянным углом относительно объекта сканирования, т.е. относительно вертикальной линии перемещаемой поверхности объекта, которая может быть более эффективно достигнута при помощи параболического зеркала, в фокусе которого вращающееся многогранное зеркало установлено таким образом, что угол наклона лазерного луча к оси симметрии параболического зеркала остается постоянным. При этом пространственное разрешение ограничено только способностью фокусировать лазерный луч. Телецентрический пучок лучей передвигаемого по линии сканирования пятна лазерного света не должен падать на сканируемую поверхность под прямым углом; угол падения может принимать любое значение в широком диапазоне, однако, он должен быть постоянным относительно нормали к транспортироумой поверхности объекта. Таким образом, диффузно отраженный свет направляется обратно на детектор через ту же систему проецирования.
В соответствии со способом, в
предпочтительном варианте которого используются параллельные процессы, в реальном масштабе времени могут измеряться различные характеристики поверхности, в частности:
a) распределение
интенсивности диффузно отраженного лазерного излучения и/или
b) распределение интенсивности лазерного излучения, рассеянного на местных изменениях плотности (эффект Трэчеда), которые
наблюдаются через пространственные фильтры в рассеивающем канале и/или
c) профиль неровностей (трехмерный канал) поверхности, который измеряется с помощью способа триангуляции и/или
d) характеристики двойного отражения, которые измеряются с помощью способов регистрации, зависящих от поляризации, например, с помощью анализатора, установленного параллельно и не параллельно
направлению поверхности.
Путем деления луча на два пучка, которые анализируются, после линзы и перед ее плоскостью изображения образованы хотя бы два канала. В принципе все вышеназванные характеристики могут быть обнаружены с помощью одного лазера, что может быть использовано при модификации светопринимающего блока. Для разделения диффузно отраженного лазерного излучения на отдельные пучки излучения в соответствии с их различными длинами волн на траектории луча устанавливается дихроичное зеркало, при этом одновременно можно регистрировать с высокой частотой следования такие характеристики поверхности, проявляющиеся в результате различных длин волн отдельных пучков, как профиль поверхности в трехмерном канале, отражательная способность в канале света красного спектра, а также эффект Трэчеда в рассеивающем канале. Один из отдельных пучков излучения, образованный на дихроичном зеркале (предпочтительно красная часть излучения диффузно отраженных лазерных лучей), еще раз разделяется предпочтительно на два канала, предпочтительно с помощью полупрозрачного зеркала, в котором расположены чувствительные датчики, диапазон измерения которых соответствует диффузно отраженному лазерному излучению, при этом внутри одного канала оценивается изображение непосредственно диффузно отраженной световой точки, т.е. световое пятно на объекте, а изображение световых конусов от эффекта рассеяния гасится, а от изображения лазерной точки получается ахроматическое изображение светового пятна, в то время как внутри другого канала (рассеивающий канал) с помощью специальных пространственных фильтров гасится диффузно рассеянная световая точка прямого излучения, т.е. световое пятно, и оценивается только изображение оставшихся световых конусов. Гашение осуществляется с помощью специальных пространственных фильтров.
Визуализация зависимых от плотности поверхностных аномалий, таких как сколы, трещины, дефекты структуры, осуществляется путем регистрации в реальном масштабе времени рассеянного (эффект Трэчеда) лазерного излучения (рассеивающий канал), которое, например, в случае с древесиной используется для оценки изображения оставшихся световых конусов с помощью четырехсекторного процесса, например, с помощью дихроичных зеркал или четырехсекторного диода, при этом аномалии являются позиционно-зависимыми в виде (Sx+Sy)/S и в виде арктангенса направления (Sx/Sy), и если необходимо также в виде функции высоты профиля в сочетании с процессом триангуляции в трехмерном канале, пространственное разрешение которого ограничено только фокусирующей способностью лазерного излучения.
Ниже приводится описание изобретения с помощью чертежей.
На фигуре 1 изображено сечение первого варианта блока датчика по настоящему изобретению.
На фигуре 2 изображено сечение второго варианта блока датчика по настоящему изобретению.
На фигуре 3 изображено сечение третьего варианта блока датчика по настоящему изобретению.
На фигуре 4 изображен вид сверху на светоотклоняющий элемент блока датчика по фигуре 3.
На фигуре 5 схематично изображен вид сверху на устройство по настоящему изобретению.
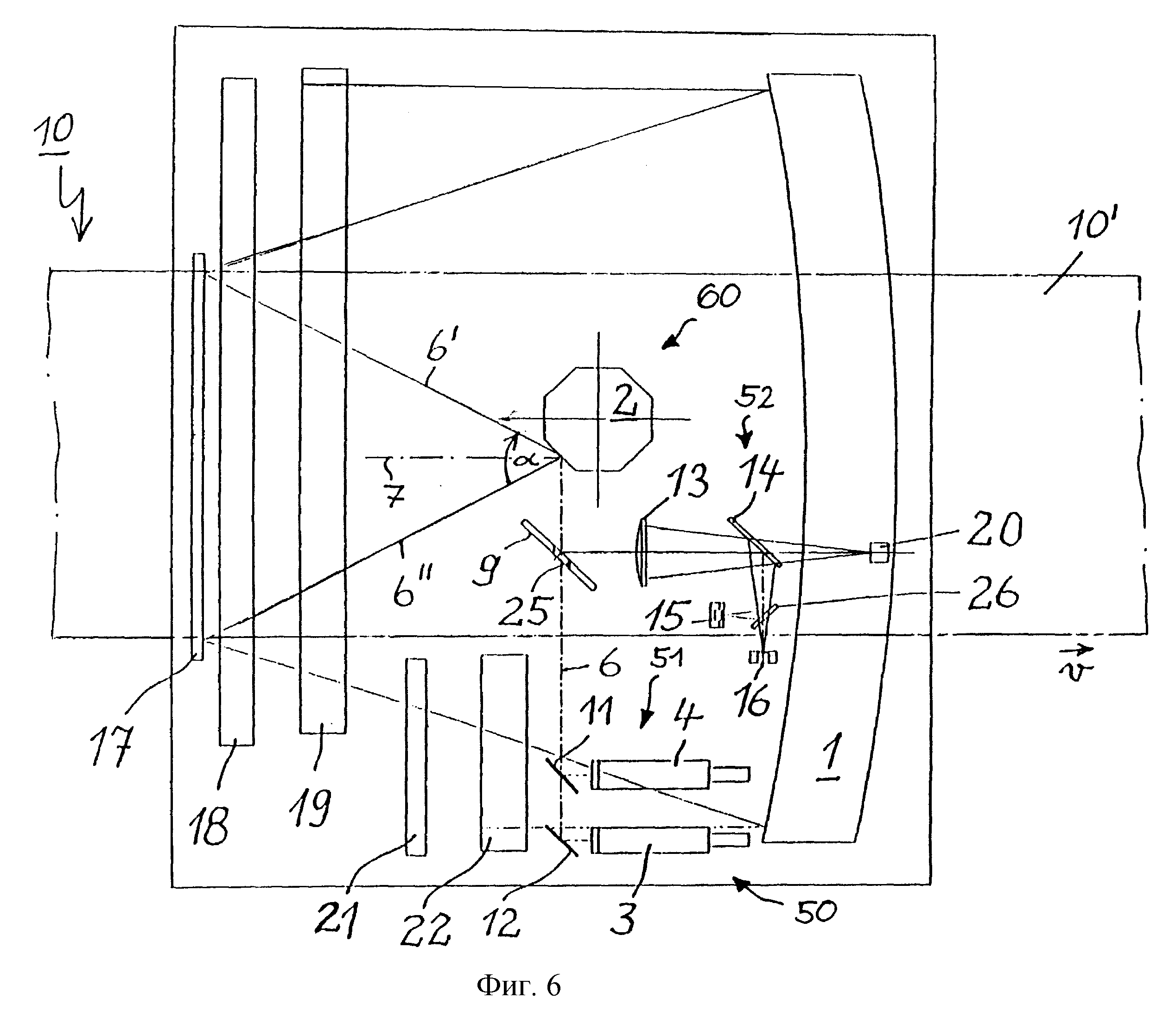
На фигуре 6 изображен вид сверху на техническое исполнение устройства по настоящему изобретению, в котором траектория луча проходит по изломанной оптической оси, что необходимо в силу малой глубины устройства.
На фигуре 7 изображен вид сбоку на устройство по фигуре 6.
На фигуре 8 изображен светопринимающий модуль с пространственным фильтром, установленным перпендикулярно к параболическому зеркалу в рассеивающем канале.
На фигуре 9 изображен светопринимающий модуль по фигуре 8 с тем же пространственным фильтром, установленным параллельно параболическому зеркалу в рассеивающем канале.
На фигуре 1 изображено сечение первого варианта блока датчика 50 по настоящему изобретению. Блок датчика 50 используется для передачи светового излучения на сканирующее устройство 60 (на фигуре 1 не показано), которое расположено в направлении стрелки 61, и для приема светового излучения, падающего из сканирующего устройства 60. В состав блока датчика 50 входит светоизлучающий модуль 51 и светопринимающий модуль 52. В состав светоизлучающего модуля 51 входит по крайней мере источник света 3 (в качестве источника света может использоваться лазер), светоизлучающий диод или другой источник света. При необходимости перед источником света 3 может устанавливаться (не показана), например, система оптической фокусировки. В состав светопринимающего модуля 52 входит по крайней мере один приемник света 20, например фотодиод, телекамера на приборах с зарядовой связью, позиционно-чувствительный светопринимающий элемент и т. п. Оптическая система 13, например фокусирующая линза или многоэлементная линза, может проецировать объект (на фигуре 1 не показан) на приемник света 20.
Помимо этого в состав блока датчика 50 входит также оптический светоотклоняющий элемент 9. Если свет от сканирующего устройства 60 падает на блок датчика 50, то он расщепляется на светоотклоняющем элементе 9 на два луча 53, 54, отличающиеся друг от друга. Траектория первого луча 53 определяется первым пространственно ограниченным участком 55 светового потока, а траектория второго луча 54 определяется вторым пространственно ограниченным участком 56 светового потока. Площадь сечения первого луча 53 меньше площади сечения второго луча 54. Светоизлучающий модуль 51 расположен в области траектории первого луча 53, а светопринимающий модуль 52 расположен в области траектории второго луча 54. В этом варианте изобретения светоотклоняющий элемент 9 выполнен в виде плоского зеркала с апертурой 25 и расположен таким образом, что большая часть светового потока, поступающего на светоотклоняющий элемент 9, проходит сквозь апертуру 25 на сканирующее устройство 60. Напротив, большая часть светового потока, идущего со стороны сканирующего устройства 60 за пределами траектории первого луча 53, отражается и передается на светопринимающий модуль 52. Боковая поверхность, которая окружает апертуру 25 светоотклоняющего элемента 9, располагается параллельно направлению прохождения светового потока 53.
На фигуре 2 схематично изображен другой вариант блока датчика 50 по настоящему изобретению. Светоотклоняющий элемент 9 выполнен в виде небольшого зеркала и расположен таким образом, что большая часть светового потока 53, проходящего от светоизлучающего модуля 51 на светоотклоняющий элемент 9, отражается и поступает на сканирующее устройство 60 (на фигуре 2 не показано). Напротив, большая часть светового потока 54, идущего от сканирующего устройства за пределами траектории первого луча 53, проходит сквозь светопринимающий модуль 52.
На фигуре 3 схематично изображен еще один вариант блока датчика 50 по настоящему изобретению. Светоотклоняющий элемент 9 соответствует светоотклоняющему элементу, изображенному на фигуре 1. В состав данного варианта блока датчика входят два источника света 3, 4, например два лазера. Первый лазер 3 излучает свет в красном диапазоне длиной волны от 620 до 770 нм, например 680 нм, а второй лазер 4 излучает свет в инфракрасном диапазоне длиной волны более 770 нм, например 830 нм. Два лазерных луча соединяются с помощью зеркала 12 и светоделителя 11. В состав светопринимающего модуля 52 входят два светоприемника 15, 20 и светоделитель 14, с помощью которого световой луч 54, падающий на светопринимающий модуль 52, разбивается на два луча, поступающих на светоприемники 15, 20. Светоделитель 14 может обладать дихроическими характеристиками, т.е. его отношение коэффициента отражения к коэффициенту пропускания может зависеть от длины волны.
На фигуре 4 схематично изображен вид сверху на зеркало 9 с апертурой 25 по линии IV-IV фигуры 3. Луч света 54, идущий от сканирующего устройства 60, который точно совпадает с лучом света 53, идущего на сканирующее устройство 60, не попадает на светопринимающий модуль 52, Таким образом, эффективно предотвращается наводка.
В соответствии с фигурой 5 основным элементом устройства по настоящему изобретению является вогнутое зеркало 1, которое в предпочтительном варианте изобретения вырезано из параболического в виде узкой полоски длиной l и высотой h. В предпочтительном варианте изобретения в виде вогнутого зеркала используется параболическое зеркало, так как оно обеспечивает идеальное, практически безаберрационное изображение. В фокальной точке параболического зеркала 1 расположено многогранное вращающееся зеркало 2, которое вращается мотором 27 с высокой скоростью, при этом по предпочтительному варианту изобретения одна из граней зеркала располагается таким образом, что при угле 45o между нормалью к грани вращающегося зеркала и оптической осью 7 (ось симметрии) параболического зеркала 1 центр грани ложится точно в точке фокуса параболического зеркала 1. Каждый из двух лазеров 3, 4 генерирует лазерный луч, при этом желательно, чтобы один лазер работал на длине волны около 680 нм, в диапазоне излучения красного света, а другой на длине волны 830 нм, в инфракрасном диапазоне. Лазерные лучи отклоняются зеркалами 11, 12 и соединяются в один луч 6. Для этой цели зеркало 11, изображенное на фигуре 1, выполнено прозрачным для лазерного луча, излучаемого лазером 3, расположенным за ним. Результирующие лучи 6 проходят через отверстие 25 другого зеркала 9 и падают на одну из граней вращающегося зеркала 2. В зависимости от конструкции вращающегося многогранного зеркала 2 и расстояния от его центра до параболического зеркала 1 это многогранное вращающееся зеркало 2 направляет лазерные лучи 6, 6', 6" под определенным заранее заданным углом горизонтального поля изображения α по всей длине 1 параболического зеркала 1, как показано на фигуре 5.
Этот угол горизонтального поля изображения α ограничен лазерными лучами 6', 6". Лазерные лучи 6'", отраженные от параболического зеркала 1, направляются параллельно друг другу по всей длине 1 параболического зеркала 1 и образуют линию сканирования. Отраженный лазерный луч 6"' направляется на наклонное зеркало и падает на поверхность 10' объекта сканирования 10, например на кусок дерева, перемещаемого относительно лазера со скоростью v. Таким образом лазерные лучи, излучаемые лазерами 3, 4, которые сфокусированы на объекте 10, направляются под постоянным углом к оси симметрии 7 параболического зеркала 1 и соответственно к нормали перемещаемой сканируемой поверхности объекта 10 вдоль линии сканирования 23, 24. Поверхность объекта проецируется на светоприемник, расположенный в светопринимающем модуле, как телецентрическое изображение.
Из точки своего падения диффузно отраженный лазерный луч направляется обратно по той же траектории, так что траектории приходящего луча и диффузно отраженного луча совпадают. Вращающееся многогранное зеркало 2 проецирует пучок диффузно отраженных лучей на зеркало 9, которое отклоняет его и направляет на блок обработки 5, который с помощью компьютера, работающего в реальном масштабе времени, оценивает оптические и электрические характеристики пучка диффузно отраженных лучей.
На фигурах 6 и 7 показано техническое воплощение устройства. Два лазера 3,4 генерируют лазерные лучи 6, которые соединяются с помощью зеркал 11, 12 и через отверстие 25 в зеркале 9 проецируются на вращаемое мотором 27 с большой скоростью многогранное зеркало, расположенное в области фокальных точек параболического зеркала 1, на которое лучи передаются через плоское зеркало 17. Эти два лазерных луча 6 проецируются на зеркало 17 с помощью многогранного вращающегося зеркала 2, которое отражает лазерные лучи на параболическое зеркало 1 так, что получается преломленная траектория луча, как показано на фигурах 6 и 7. В данном случае отраженные от параболического зеркала 1 лазерные лучи направляются параллельно друг другу и под постоянным углом к оси симметрии 7 и соответственно к нормали 19 перемещаемой поверхности 10' объекта 10 на поверхность 10'.
Таким образом, в соответствии с фигурой 7 на пути луча после параболического зеркала 1 под углом к сканируемой поверхности 10' объекта 10 установлены два зеркала 18, 19, которые направляют параллельные лазерные лучи по линии сканирования 23 по всей поверхности 10'. Два зеркала 18, 19 используются для оценки, выполняемой по способу триангуляции для получения трехмерного изображения. В принципе достаточно одного зеркала 19 для осуществления способа, если нет необходимости считывать информацию в вертикальном направлении.
Ниже, на основе траекторий луча, изображенных на фигуре 7, рассмотрены случаи с использованием триангуляции и без нее. Световой луч из блока датчика 50, отраженный от параболического зеркала 1, проходит через зеркало 19 и падает на объект 10. В этом случае, в соответствии с предпочтительным вариантом изобретения, угол падения β к нормали 29 поверхности объекта 10' больше нуля, т.е. световой луч падает на поверхность 10' не под прямым углом. Следовательно, световой луч, отраженный от поверхности 10', не возвращается на зеркало 19; поэтому измеряется диффузное отражение поверхности 10'. В этом случае (без использования способа триангуляции) измеряется световой луч, который возвращается на блок датчика 50 через зеркало 19 под тем же углом отражения β по той же траектории, что и падающий световой луч. Если применяется способ триангуляции, то измеряется вертикальное перемещение светового луча, который диффузно отражается под постоянным углом θ к падающему лучу света и который возвращается обратно на блок датчика 50 через зеркало 18. В этом случае световой луч также возвращается по той же траектории к блоку датчика 50, что и падающий луч света. При этом угол θ определяет разрешение трехмерных измерений. Чем больше угол θ, тем с большей чувствительностью может быть измерен трехмерный профиль. Желательно, чтобы угол θ был равен θ = 15,5o±5o. В другом варианте настоящего способа, световой луч направляется на объект 10 как через зеркало 19, так и через зеркало 18 (или по большему числу траекторий), и при этом регистрируются соответствующие диффузно отраженные участки светового луча.
Два других зеркала 21, 22, которые на виде сверху расположены сбоку от зеркал 18, 19, и, если необходимо, в разных плоскостях, используются для того, чтобы одновременно направлять лазерные лучи по боковой поверхности 10" объекта 10 вдоль другой линии сканирования 24 и также получать трехмерное изображение так, что выполняется одновременное сканирование двух плоскостей 10', 10", наклоненных друг к другу под определенным углом (в приведенном примере угол между этими плоскостями равен 90o). Диффузно отраженные световые лучи идут обратно по той же траектории и падают на зеркало 9 под углом горизонтального поля изображения α, откуда они отклоняются на линзу 13.
На пути луча после линзы 13 расположено дихроичное зеркало 14, которое прозрачно для инфракрасных лучей диффузно отраженного лазерного луча, но отклоняет диффузно отраженные лучи красного спектра излучения другого лазера. За зеркалом 14 в плоскости поля изображения линзы 13 установлен приемник 20; сигналы которые он принимает, используются как трехмерное изображение. Эта информация обрабатывается в компьютере как рельефное изображение для идентификации изменений объекта по глубине. В предпочтительном варианте изобретения в качестве чувствительного элемента 20 для трехмерного канала применяется позиционно-чувствительный, электрооптический, светопринимающий элемент, в частности высокоскоростной чувствительный элемент позиционно-чувствительного детектора, который регистрирует отклонения лазерного луча, направляемого через зеркало 18 или 21 соответственно, от нулевого положения. Доля светового потока красного спектра излучения диффузно отраженных лазерных лучей отводится через дихроичное зеркало 14 и попадает на светоделительное зеркало 26, которое снова делит этот луч между двумя каналами, в которых установлены светочувствительные датчики 15, 16. Один канал работает, как так называемый красный датчик, и обеспечивает ахроматическое изображение, при помощи которого оценивается изображение точки прямого света, или светового пятна, на объекте. С этой целью с помощью диафрагмы гасится световой конус рассеяния. Другой канал называется рассеивающим каналом и используется для оценки реального изображения рассеяния, а в случае с древесиной - светового конуса, который окружает световое пятно. Таким образом, центральная точка, или соответственно центральное пятно, которое оценивается в другом канале, гасится с помощью специальных пространственных фильтров 30 в рассеивающем канале, а изображение оставшихся конусов, например, проецируется на четырехсекторный диод. Из соотношения световых конусов можно вычислить их положение относительно друг друга и относительно направления перемещения объекта, а в случае с древесиной, например, направление волокон или мест, пораженных выцветом или красной кольцевой гнилью. Для оценки диффузно отраженного лазерного излучения энергетическое и/или позиционное распределение диффузно отраженного излучения преобразуется в различные электрические сигналы.
С помощью компьютера, работающего в реальном масштабе времени, могут оцениваться каналы и может выводиться на монитор изображение. Можно также преобразовывать сигналы, поступающие из трех каналов, в коды цвета для получения цветного изображения.
Можно также передавать диффузно отраженное лазерное излучение для оценки на телекамеру на приборах с зарядовой связью.
На фигурах 8 и 9 изображен вид светопринимающего модуля 15 с пространственным фильтром 30, установленным под прямым углом к параболическому зеркалу 1 в рассеивающем канале с линзой 13 и зеркалом 14, а также вид того же светопринимающего модуля 15 с тем же пространственным фильтром 30, установленным в рассеивающем канале параллельно параболическому зеркалу. Для гашения применяется центральная пластина 31, при этом световые конусы поступают на светоприемник 15 через щели 32, 33.
Устройство и способ служат для оценки поверхности объекта, в частности плоских объектов, таких как древесина,
керамическая плитка, текстильные изделия, стекло, пластик, фольга, кремниевые пластины, картон и других для идентификации поверхностных характеристик, таких как сколы, трещины, выщерблины, выступы или
вмятины, и для их оценки в соответствии с критериями качества. Предлагаемые устройство и способ могут, в частности, использоваться для контроля древесины, так как они, во-первых, могут непосредственно
оценивать эффект рассеяния в случае с древесиной и обеспечивать выборочное оптическое усиление контраста в случае других поверхностных дефектов или для сортировки древесины со следами резки. К тому же
выцвет, а также грязь или термические дефекты или трещины, а также сколы становятся видимыми. Полезность изобретения состоит, в частности, в том, что различные поверхностные характеристики могут быть
измерены в реальном масштабе времени, например:
a) распределение интенсивности диффузно отраженного света лазера;
b) распределение интенсивности света лазера, рассеянного на
локальных изменениях плотности (эффект Трэчеда), которые наблюдаются через пространственные фильтры в рассеивающем канале;
c) профиль поверхности (трехмерный канал), который измеряется с
помощью способа триангуляции;
d) характеристики двойного отражения, которые измеряются путем регистрации процессов, зависимых от поляризации, например, с помощью анализатора, расположенного
параллельно или не параллельно направлению движения поверхности.
Реферат
Изобретение относится к устройству и способу контроля поверхности объекта для идентификации поверхностных характеристик типа дефектов структуры. В состав устройства входят светоизлучающий модуль 51, который излучает по крайней мере один пучок лучей 6, 6', 6", и светопринимающий модуль 52, в состав которого входит по крайней мере один светоприемник 15, 16, 20. В фокусе параболического зеркала 1 устанавливается вращающееся многогранное зеркало 2, на которое с помощью телецентрической линзы направляется пучок лучей 6 лазера 3, 4; эта линза направляет прямой и обратный лучи по одной оптической оси, при этом параболическое зеркало 1 направляет отклоненный пучок лучей 6, 6', 6" под постоянным углом к оси симметрии (7) параболического зеркала 1 вдоль линии сканирования объекта 10, а диффузно отраженный пучок лучей после отклонения от общей траектории луча поступает на блок обработки. Техническим результатом является возможность измерения различных поверхностных характеристик, в том числе и профиля поверхности в реальном масштабе времени. 2 с. и 24 з. п. ф-лы, 9 ил.

Комментарии