Лидарные (lidar) способы и системы со сканированием с избирательной плотностью на основе mems - RU2752016C2
Код документа: RU2752016C2
Чертежи









Описание
Область техники, к которой относится изобретение
[0001] Настоящая технология относится к лидарным (LiDAR) системам оптического обнаружения и дальнометрии, а более конкретно, к лидарным системам для обнаружения объектов в интересующей области.
Уровень техники
[0002] В предшествующем уровне техники предложены и реализованы несколько компьютерных навигационных систем, которые выполнены с возможностью помощи при навигации и/или управлении транспортными средствами. Эти системы варьируются от более базовых решений на основе картографической локализации, т.е. от использования компьютерной системы для того, чтобы помогать водителю в осуществлении навигации по маршруту из начального пункта в пункт назначения, до более сложных решений, таких как компьютеризированные и/или автономные от водителя системы вождения.
[0003] Некоторые из этих систем реализуются как то, что общеизвестно в качестве системы "оптимального регулирования скорости" или системы “круиз-контроля”. В этих системах, компьютерная система на борту транспортных средств поддерживает заданную пользователем скорость транспортного средства. Часть систем оптимального регулирования скорости реализует систему "интеллектуального управления дистанцией", за счет которой пользователь может устанавливать дистанцию до потенциального автомобиля впереди (к примеру, выбирать значение, выражаемое в числе транспортных средств), и компьютерная система регулирует скорость транспортного средства по меньшей мере частично на основе транспортного средства, приближающегося к впереди идущему потенциальному транспортному средству в пределах предварительно заданной дистанции. Некоторые системы оптимального регулирования скорости дополнительно оснащаются системами управления столкновениями, причем эти системы, при обнаружении транспортного средства (или другого препятствия) перед движущимся транспортным средством, замедляют или останавливают транспортное средство.
[0004] Некоторые усовершенствованные системы обеспечивают полностью автономное вождение транспортного средства без прямого управления оператора (т.е. водителя). Эти транспортные средства с поддержкой автономного вождения включают в себя системы, которые могут вызывать ускорение, торможение, остановку, смену полосы движения и самостоятельную парковку транспортного средства.
[0005] Одна из основных технических проблем в реализации вышеуказанных систем заключается в способности обнаруживать объект, расположенный поблизости от транспортного средства. В одном примере, системам может требоваться способность обнаруживать транспортное средство впереди рассматриваемого транспортного средства (причем рассматриваемое транспортное средство имеет систему на борту), причем это впереди идущее транспортное средство может представлять риск/опасность для рассматриваемого транспортного средства и может требовать от системы принятия корректирующей меры, будь то торможение либо в иных случаях изменение скорости, остановка или смена полосы движения.
[0006] Другие технические проблемы с реализацией вышеуказанных систем включают в себя декалибровку датчиков и других компонентов, которые собирают данные относительно окрестностей транспортного средства. Множество факторов, включающих в себя погоду, дорожные условия, привычки при вождении, например, оказывают влияние на датчики и другие компоненты с течением времени, требующие калибровки, чтобы обеспечивать то, что данные точно собираются и корректно используются для управления транспортными средствами.
[0007] В лидарных системах, объекты поблизости от транспортного средства могут обнаруживаться посредством передачи лучей света в сторону интересующей области и измерения отраженных световых лучей с помощью детектора. Лазеры, испускающие световые импульсы в пределах узкой длины волны, зачастую используются в качестве источника света. Позиция и дистанция объекта могут вычисляться с использованием вычислений времени пролета испускаемого и обнаруженного светового луча. Посредством вычисления таких позиций в качестве "точек данных", может формироваться цифровое многомерное представление окрестностей.
[0008] Во вращательных лидарных системах, световые лучи принудительно вращаются вокруг горизонтальной или вертикальной оси, что может обеспечивать сканирование интересующей области в горизонтальной или вертикальной плоскости, соответственно. Типично, такое вращение лучей достигается посредством лазера, который является вращающимся. Тем не менее, подвижные компоненты лидарной системы подвержены износу, что приводит к преждевременному отказу системы.
[0009] Кроме того, плотность точек данных, сформированных посредством вращательных лидарных систем, ограничена посредством скорости вращения световых лучей вокруг горизонтальной или вертикальной оси, в которой испускаются лазерные лучи.
Сущность изобретения
[00010] Следовательно, имеется потребность в системах, которые исключают, уменьшают или преодолевают ограничения предшествующего уровня техники.
[00011] Разработчики настоящей технологии выявили недостатки решений предшествующего уровня техники.
[00012] Например, заявка US 20190094345, опубликованная 23 марта 2019 года и принадлежащая в настоящее время Leica Geosystems AG, описывает лазерное сканирующее устройство, которое может быть выполнено с возможностью монтироваться на транспортном средстве, устройстве, содержащем лидарный модуль, работающий на основе лазерного измерительного луча и принципа измерений времени пролета. Лидарный модуль выполнен с возможностью предоставлять горизонтальное поле зрения по меньшей мере в 60°, мгновенное вертикальное поле зрения по меньшей мере в ±2°, разрешение сканирования по меньшей мере одной точки в расчете на 0,8° в горизонтальном и вертикальном направлении и частоту кадров по меньшей мере в 10 Гц для сканирования по меньшей мере всего горизонтального и мгновенного вертикального поля зрения с упомянутым разрешением сканирования, при этом лидарный модуль содержит многолучевое передающее устройство, выполненное с возможностью формирования множества измерительных лучей.
[00013] Заявка US 20190101628, опубликованная 04 апреля 2019 года и принадлежащая в настоящее время Infineon Technologies AG, описывает оборудование для оптического обнаружения и дальнометрии. Оборудование включает в себя отражающую поверхность, выполненную с возможностью колебаться относительно оси вращения, и множество источников света, каждый из которых выполнен с возможностью управляемо испускать соответствующий световой луч через оптическую систему на отражающую поверхность. Дополнительно оборудование включает в себя контроллер, выполненный с возможностью управлять временами испускания множества источников света таким образом, что отражающая поверхность испускает множество световых лучей в окружение согласно первой последовательности направлений луча для первого измерения и согласно второй последовательности направлений луча для последующего второго измерения.
[00014] Площадь, которая может сканироваться посредством традиционных вращательных лидарных систем, определяется, на горизонтальной оси, посредством степени доступного вращения лазерного луча вокруг оси вращения. В определенных системах, которые включают в себя микроэлектромеханический (MEM) компонент, сканирование на вертикальной оси доступно и ограничено посредством амплитуды колебаний MEM-компонента. В определенных ситуациях, желательно увеличивать отсканированную площадь. Увеличение числа источников света или MEM-компонентов также может увеличивать площадь, но это является нежелательным вследствие расходов на лазеры в качестве источников света и желания ограничивать число движущихся частей в лидарной системе с тем, чтобы продлевать срок службы системы.
[00015] В широком смысле, авторы изобретения разрабатывают лидарную систему, которая может сканировать увеличенную площадь по сравнению с традиционными системами без использования дополнительных источников света или подвижных компонентов, в конкретных вариантах осуществления. В конкретных вариантах осуществления лидарные системы настоящей технологии имеют увеличенный угол распространения луча света, передаваемого в интересующую область, на одной или обеих из горизонтальной или вертикальной оси.
[00016] В конкретных вариантах осуществления преимущества настоящей технологии включают в себя повышенную плотность точек данных в данной интересующей области (ROI) и в силу этого увеличенное разрешение объекта в ROI. Кроме того, настоящая технология включает в себя повышенную пропускную способность системы без негативного влияния на дороговизну и сложность системы.
[00017] В соответствии с первым широким аспектом настоящей технологии предусмотрена лидарная система для обнаружения объектов в интересующей области, причем система содержит источник излучения для испускания выходного луча, микроэлектромеханический (MEM) компонент для приема выходного луча на отражающей поверхности MEM-компонента и для отражения выходного луча в сторону интересующей области, причем MEM-компонент выполнен с возможностью колебаться относительно первой оси колебаний с первой амплитудой колебаний, чтобы распространять выходной луч посредством вертикального интервала вдоль вертикальной оси в интересующей области, детектор для обнаружения входного луча из интересующей области, процессор, соединенный с возможностью связи с MEM-компонентом и детектором, причем процессор выполнен с возможностью определять из входного луча, принимаемого посредством детектора, имеется ли объект в интересующей области, и в ответ на определение, что имеется объект в интересующей области, вызывать модулирование первой амплитуды колебаний MEM-компонента до первой модулированной амплитуды колебаний для уменьшения вертикального интервала выходного луча вокруг объекта.
[00018] В некоторых вариантах осуществления лидарная система, в которой первая амплитуда колебаний располагается в диапазоне между +/-14 градусов.
[00019] В некоторых вариантах осуществления лидарная система, в которой первая модулированная амплитуда колебаний располагается в диапазоне между +/-28 градусов.
[00020] В некоторых вариантах осуществления лидарная система, в которой первая модулированная амплитуда колебаний задает интересующую подобласть в интересующей области, причем интересующая подобласть находится между +/-28 градусов.
[00021] В некоторых вариантах осуществления лидарная система, в которой выходной луч дополнительно содержит множество последовательных выходных лучей, причем плотность последовательных выходных лучей, падающих в интересующей подобласти, выше плотности последовательных выходных лучей в интересующей области.
[00022] В некоторых вариантах осуществления лидарная система, в которой MEM-компонент дополнительно выполнен с возможностью колебаться относительно второй оси колебаний со второй амплитудой колебаний, чтобы распространять выходной луч посредством горизонтального интервала вдоль горизонтальной оси в интересующей области.
[00023] В некоторых вариантах осуществления лидарная система, в которой вторая амплитуда колебаний располагается в диапазоне между +/-15 градусов.
[00024] В некоторых вариантах осуществления лидарная система, в которой процессор дополнительно выполнен с возможностью, в ответ на определение, что объект в интересующей области имеется, вызывать модулирование второй амплитуды колебаний MEM-компонента до второй модулированной амплитуды колебаний для уменьшения горизонтального интервала выходного луча вокруг объекта.
[00025] В некоторых вариантах осуществления лидарная система, в которой вторая модулированная амплитуда колебаний располагается в диапазоне между +/-14 градусов.
[00026] В некоторых вариантах осуществления лидарная система, в которой первая модулированная амплитуда колебаний и вторая модулированная амплитуда колебаний задают интересующую подобласть в интересующей области, причем интересующая подобласть представляет собой двумерную зону.
[00027] В некоторых вариантах осуществления лидарная система, в которой выходной луч дополнительно содержит множество последовательных выходных лучей, причем плотность последовательных выходных лучей, падающих в интересующей подобласти, выше плотности последовательных выходных лучей в интересующей области.
[00028] В некоторых вариантах осуществления лидарная система, в которой источник излучения представляет собой одно из следующего: система с одним лазером и система с двумя лазерами.
[00029] В некоторых вариантах осуществления лидарная система, в которой MEM-компонент размещен на платформе, которая выполнена с возможностью вращаться на горизонтальной плоскости.
[00030] В некоторых вариантах осуществления лидарная система дополнительно содержит коллиматор для модуляции направления выходного луча к MEM-компоненту.
[00031] В некоторых вариантах осуществления лидарная система, в которой обратная трасса для входного луча из интересующей области в детектор включает в себя подучасток, который представляет собой тракт, идентичный тракту, используемому для выходного луча.
[00032] В некоторых вариантах осуществления лидарная система, в которой обратная трасса для входного луча из интересующей области в детектор включает в себя подучасток, который представляет собой тракт, отличающийся от тракта, используемого для выходного луча.
[00033] В некоторых вариантах осуществления лидарная система, в которой обратная трасса содержит приемную линзу, выполненную с возможностью принимать входной луч и фокусировать входной луч на матрице оптических волокон, причем матрица оптических волокон соединяется на одном конце с детектором.
[00034] В некоторых вариантах осуществления лидарная система, в которой процессор выполнен с возможностью координировать испускание выходного луча посредством источника излучения с обнаружением входного луча посредством детектора таким образом, что вызывают испускание данного выходного луча после того, как обнаружен входной луч, связанный с ранее испускаемым выходным лучом.
[00035] В соответствии со вторым широким аспектом настоящей технологии предусмотрен лидарный способ для обнаружения объектов в интересующей области, причем способ реализуется посредством процессора, соединенного с возможностью связи с лидарной системой, при этом способ содержит вызов испускание источником излучения выходного луча к микроэлектромеханическому (MEM) компоненту, вызов колебания MEM-компонента с первой амплитудой колебаний, чтобы отражать и распространять выходной луч посредством вертикального интервала вдоль вертикальной оси в интересующей области, определение из входного луча, принимаемого из интересующей области, имеется ли объект в интересующей области, и в ответ на определение, что имеется объект в интересующей области, вызов модулирования первой амплитуды колебаний MEM-компонента до первой модулированной амплитуды колебаний для уменьшения вертикального интервала выходного луча вокруг объекта.
[00036] В некоторых вариантах осуществления вызов испускания источником излучения выходного луча содержит вызов испускания источником излучения первого выходного луча, и после того, как первый входной луч, связанный с первым выходным лучом, обнаружен, вызов испускания источником излучения второго выходного луча.
[00037] В контексте настоящего описания изобретения "источник излучения" широко означает любое устройство, выполненное с возможностью испускать излучение, такое как сигнал излучения в форме луча. Источник излучения включает в себя, но не только, источник света, выполненный с возможностью испускать световые лучи. Источник света может представлять собой лазер, такой как твердотельный лазер, лазерный диод, лазер с высоким уровнем мощности или альтернативный источник света, такой как источник света на основе светоизлучающих диодов (светодиодов). Некоторые (неограничивающие) примеры источника света представляют собой лазерный диод с резонатором Фабри-Перо, лазер на квантовых ямах, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер на основе поверхностного излучения с вертикальным резонатором (VCSEL). Помимо этого, источник света может испускать световые лучи в отличающихся форматах, к примеру, как световые импульсы, незатухающая волна (CW), квази-CW и т.д. В некоторых неограничивающих примерах, источник света может включать в себя лазерный диод, выполненный с возможностью испускать свет при длине волны около между 650 нм и 1150 нм. Альтернативно, источник света может включать в себя лазерный диод, выполненный с возможностью испускать световые лучи при длине волны около между 800 нм и 1000 нм, около между 850 нм и 950 нм, около между 1300 нм и 1600 нм либо между любым другим подходящим диапазоном. Если не указано иное, термин "около" относительно числового значения задается как дисперсия вплоть до 10% относительно заявленного значения.
[00038] В контексте настоящего описания изобретения, "выходной луч" также может упоминаться как луч излучения, такой как световой луч, который формируется посредством источника излучения и направляется в направлении от начала тракта в сторону интересующей области (ROI). Выходной луч может иметь один или более параметров, таких как: длительность луча, угловая дисперсия луча, длина волны, мгновенная мощность, плотность фотонов на различных дистанциях от источника света, средняя мощность, интенсивность по мощности луча, ширина луча, частота повторения луча, последовательность прохождения луча, скважность импульсов, длина волны или фаза и т.д. Выходной луч может не иметь поляризации или иметь случайную поляризацию, может не иметь конкретной или фиксированной поляризации (например, поляризация может варьироваться во времени) либо может иметь конкретную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[00039] В контексте настоящего описания изобретения, "входной луч" также может упоминаться как луч излучения, такой как световой луч, отраженный от одного или более объектов в ROI. Под словом "отраженный" подразумевается то, что по меньшей мере участок светового луча из выходного луча отскакивает от одного или более объектов в ROI. Выходной луч может иметь один или более параметров, таких как: время пролета (т.е. время от испускания до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность по всему обратному импульсу и фотонное распределение/сигнал за период обратного импульса и т.д.
[00040] В контексте настоящего описания изобретения, "интересующая область" может широко включать в себя участок наблюдаемого окружения лидарной системы, в котором могут обнаруживаться один или более объектов. Следует отметить, что интересующая область (ROI) лидарной системы может затрагиваться посредством различных условий, таких как, но не только: ориентация лидарной системы (например, направление оптической оси лидарной системы); позиция лидарной системы относительно окружения (например, дистанция над землей и смежная топография и препятствия); рабочие параметры лидарной системы (например, мощность испускания, вычислительные настройки, заданные рабочие углы) и т.д. ROI лидарной системы может задаваться, например, посредством плоского угла или телесного угла. В одном примере, ROI также может задаваться в пределах определенного диапазона (например, около вплоть до 200 м либо около того).
[00041] В контексте настоящего описания изобретения, "сервер" представляет собой компьютерную программу, которая выполняется на соответствующих аппаратных средствах и допускает прием запросов (например, из электронных устройств) по сети и выполнение этих запросов либо вызов выполнения этих запросов. Аппаратные средства могут реализовываться как один физический компьютер или одна физическая компьютерная система, но ни одно из означенного не должно обязательно иметь место относительно настоящей технологии. В настоящем контексте использование выражения "сервер" не означает, что каждая задача (например, принимаемые инструкции или запросы) или любая конкретная задача будет принята, выполнена или вызвана к выполнению посредством идентичного сервера (т.е. идентичного программного обеспечения и/или аппаратных средств); оно означает, что любое число программных элементов или аппаратных устройств может быть предусмотрено при приеме/отправке, выполнении или вызову к выполнению любой задачи или запроса либо результатов любой задачи или запроса; и все это программное обеспечение и аппаратные средства могут представлять собой один сервер либо несколько серверов, причем все из означенного включается в выражение "по меньшей мере один сервер".
[00042] В контексте настоящего описания изобретения "электронное устройство" представляет собой любые компьютерные аппаратные средства, которые допускают выполнение программного обеспечения, соответствующего рассматриваемой релевантной задаче. В контексте настоящего описания изобретения, термин "электронное устройство" подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств; тем не менее, это не должно обязательно иметь место относительно настоящей технологии. Таким образом, некоторые (неограничивающие) примеры электронных устройств включают в себя беспилотный блок, персональные компьютеры (настольные компьютеры, переносные компьютеры, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает того, что оно не может функционировать в качестве сервера для других электронных устройств.
[00043] В контексте настоящего описания изобретения, выражение "информация" включает в себя информацию вообще любого характера или вида, допускающую сохранение в базе данных. Таким образом, информация включает в себя, но не только, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные местоположения, погодные данные, данные трафика, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[00044] В контексте настоящего описания изобретения, "база данных" представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программного обеспечения управления базами данных или компьютерных аппаратных средств, на которых данные сохраняются, реализуются или становятся доступными иными способами для использования. База данных может постоянно размещаться в идентичных аппаратных средствах с процессом, который сохраняет или использует информацию, сохраненную в базе данных, либо она может постоянно размещаться в отдельных аппаратных средствах, таких как выделенный сервер или множество серверов.
[00045] В контексте настоящего описания изобретения, слова "первый", "второй", "третий" и т.д. использованы в качестве прилагательных только для целей обеспечения различения существительных, которые они модифицируют, друг от друга, а не для целей описания конкретных взаимосвязей между этими существительными. Дополнительно, как пояснено в данном документе в других контекстах, ссылка на "первый" элемент и "второй" элемент не исключает того, что два элемента представляют собой идентичный фактический элемент реального мира.
[00046] Реализации настоящей технологии имеют по меньшей мере одну из вышеуказанных целей и/или аспектов, но не обязательно имеют все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые получены в результате попытки достигать вышеуказанной цели, могут не удовлетворять этой цели и/или могут удовлетворять другим целям, не изложенным конкретно в данном документе.
[00047] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии должны становиться очевидными из нижеприведенного описания, прилагаемых чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[00048] Эти и другие признаки, аспекты и преимущества настоящей технологии должны становиться более понятными при рассмотрении нижеприведенного описания, прилагаемой формулы изобретения и прилагаемых чертежей, на которых:
[00049] Фиг. 1 иллюстрирует принципиальную схему примерной компьютерной системы для реализации конкретных вариантов осуществления систем и/или способов настоящей технологии;
[00050] Фиг. 2 иллюстрирует сетевое вычислительное окружение, подходящее для использования с конкретными вариантами осуществления настоящей технологии;
[00051] Фиг. 3 иллюстрирует принципиальную схему примерной лидарной системы для реализации конкретных вариантов осуществления систем и/или способов настоящей технологии;
[00052] Фиг. 4 иллюстрирует реализацию лидарной системы, реализованной в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии;
[00053] Фиг. 5 иллюстрирует характерную реализацию оптического детектора, реализованного в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии;
[00054] Фиг. 6 и 7 иллюстрируют характерные примеры вертикального интервала и уменьшенного вертикального интервала, соответственно, связанных с выходными лучами вдоль вертикальной оси, в соответствии с различными вариантами осуществления настоящей технологии;
[00055] Фиг. 8 и 9 иллюстрируют характерные примеры горизонтального интервала и уменьшенного горизонтального интервала, соответственно, связанных с выходными лучами вдоль горизонтальной оси, в соответствии с различными вариантами осуществления настоящей технологии;
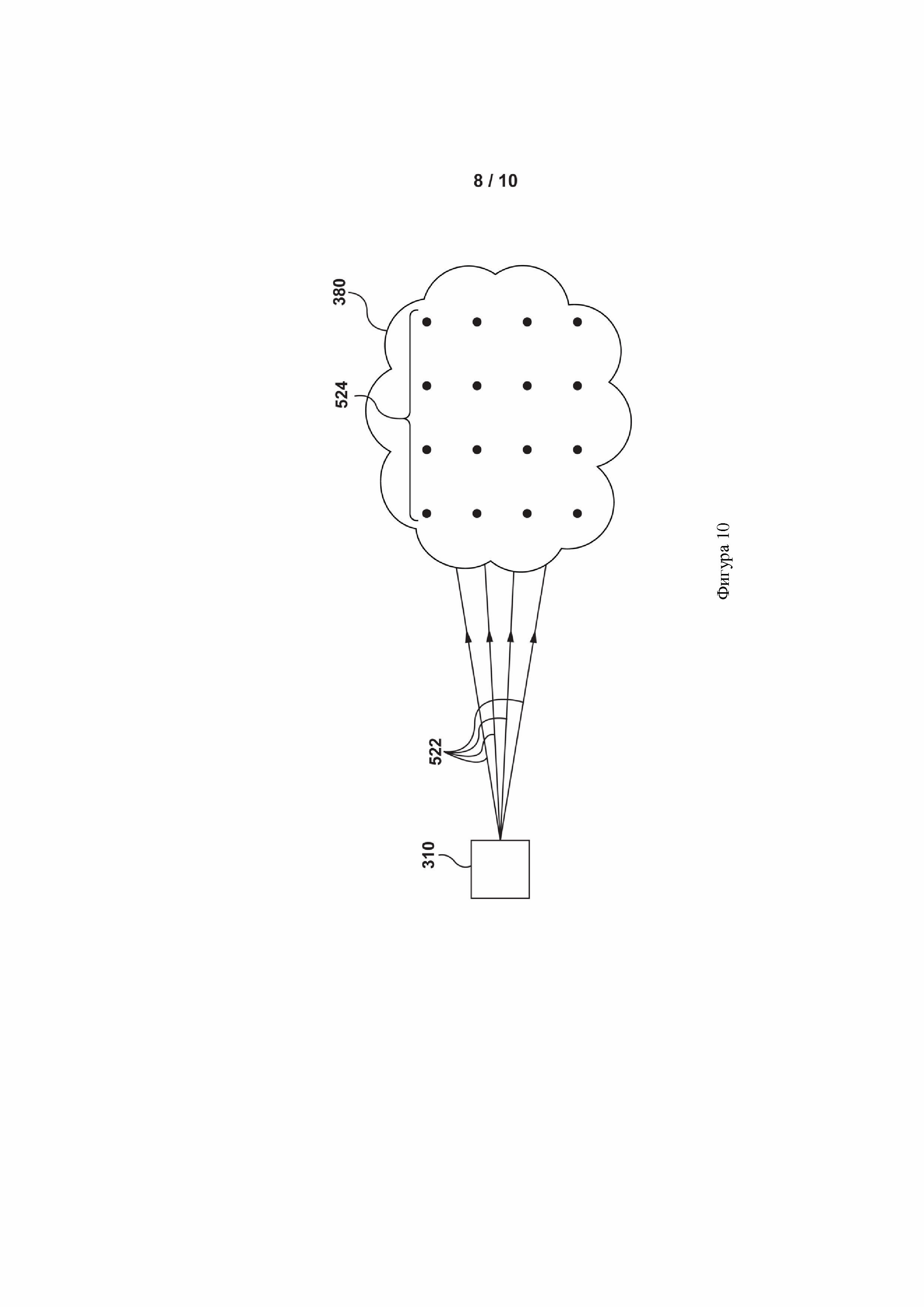
[00056] Фиг. 10 и 11 иллюстрируют характерные примеры двумерных вертикальных и горизонтальных интервалов и уменьшенных двумерных вертикальных и горизонтальных интервалов, соответственно, связанных с выходными лучами вдоль вертикальной оси и горизонтальной оси, в соответствии с различными вариантами осуществления настоящей технологии; и
[00057] Фиг. 12 иллюстрирует блок-схему последовательности операций способа 600 для обнаружения объектов в интересующей области, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
Подробное описание изобретения
[00058] Примеры и условный язык, изложенный в данном документе, преимущественно помогают читателю в понимании принципов настоящей технологии, а не ограничивают ее объем такими конкретно изложенными примерами и условиями. Следует принимать во внимание, что специалисты в данной области техники могут разрабатывать различные компоновки, которые, хотя и не описаны или показаны явно в данном документе, тем не менее, осуществляют принципы настоящей технологии и включаются в пределы ее сущности и объема.
[00059] Кроме того, в качестве помощи в понимании, нижеприведенное описание может описывать относительно упрощенные реализации настоящей технологии. Специалисты в данной области техники должны понимать, что различные реализации настоящей технологии могут иметь большую сложность.
[00060] В некоторых случаях также может быть изложено то, что считается полезными примерами модификаций настоящей технологии. Это осуществляется просто в качестве помощи в понимании и, кроме того, не должно не задавать объем или излагать ограничения настоящей технологии. Эти модификации не представляют собой исчерпывающий список, и специалисты в данной области техники могут вносить другие модификации при одновременном пребывании в пределах объема настоящей технологии. Дополнительно, если примеры модификаций не изложены, не следует интерпретировать это таким образом, что модификации невозможны, и/или таким образом, что то, что описывается, представляет собой единственный способ реализации этого элемента настоящей технологии.
[00061] Кроме того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, охватывают их конструктивные и функциональные эквиваленты независимо от того, являются они известными в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области техники должны признавать, что блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, осуществляющей принципы настоящей технологии. Аналогично следует принимать во внимание, что все блок-схемы последовательности операций, блок-схемы, схемы переходов состояния, псевдокод и т.п. представляют различные процессы, которые могут представляться большей частью на машиночитаемых носителях, и в силу этого выполняются посредством компьютера или процессора, независимо от того, показан ли в явной форме такой компьютер или процессор.
[00062] Функции различных элементов, показанных на чертежах, включающих в себя все функциональные блоки, помеченные как "процессор", могут предоставляться с помощью специализированных аппаратных средств, а также аппаратных средств, допускающих выполнение программного обеспечения, в ассоциации с надлежащим программным обеспечением. При предоставлении посредством процессора, функции могут предоставляться посредством одного специализированного процессора, посредством одного совместно используемого процессора или посредством множества отдельных процессоров, некоторые из которых могут совместно использоваться. Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как означающее исключительно аппаратные средства, допускающие выполнение программного обеспечения, и может неявно включать в себя, без ограничений, аппаратные средства процессора цифровых сигналов (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянное запоминающее устройство (ROM) для сохранения программного обеспечения, оперативное запоминающее устройство (RAM) и энергонезависимое устройство хранения. Также могут быть включены другие аппаратные средства, традиционные и/или специализированные.
[00063] Программные модули или просто модули, которые подразумеваются как программные, могут представляться в данном документе в качестве любой комбинации элементов блок-схемы последовательности операций способа или других элементов, указывающих выполнение этапов процесса, и/или текстового описания. Такие модули могут выполняться посредством аппаратных средств, которые показаны явно или неявно.
[00064] С учетом этих основных принципов, далее рассматриваются некоторые неограничивающие примеры, чтобы иллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[00065] При обращении первоначально к фиг. 1, показана компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные аппаратные компоненты, включающие в себя один или более одно- или многоядерных процессоров, совместно представленных посредством процессора 110, полупроводниковый накопитель 120, запоминающее устройство 130, которое может представлять собой оперативное запоминающее устройство или любой другой тип запоминающего устройства.
[00066] Связь между различными компонентами компьютерной системы 100 может осуществляться посредством одной или более внутренних и/или внешних шин (не показаны) (например, посредством PCI-шины, универсальной последовательной шины, шины по стандарту IEEE1394 Firewire, шины SCSI, шины Serial ATA и т.д.), с которыми электронно соединяются различные аппаратные компоненты. Согласно вариантам осуществления настоящей технологии полупроводниковый накопитель 120 сохраняет программные инструкции, подходящие для загрузки в запоминающее устройство 130 и выполняемые посредством процессора 110 для определения присутствия объекта. Например, программные инструкции могут представлять собой часть управляющего приложения транспортного средства, выполняемого посредством процессора 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты (не проиллюстрированы), такие как модули сетевой связи, модули локализации и т.п.
Сетевое компьютерное окружение
[00067] Фиг. 2 иллюстрирует сетевое компьютерное окружение 200, подходящее для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевое компьютерное окружение 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не проиллюстрирован), который связан с транспортным средством 220, к примеру, с оператором транспортного средства 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, через Интернет и т.п., как подробнее описывается ниже в данном документе).
[00068] Необязательно, сетевое компьютерное окружение 200 также может включать в себя GPS-спутник (не проиллюстрирован), передающий и/или принимающий GPS-сигнал в/из электронного устройства 210. Следует понимать, что настоящая технология не ограничена GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что GPS-спутник может вообще опускаться.
[00069] Транспортное средство 220, с которым связано электронное устройство 210, может содержать любое перевозное транспортное средство, для туризма или иных целей, такое как личный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Хотя транспортное средство 220 проиллюстрировано как наземное транспортное средство, это может не иметь место в каждом варианте осуществления настоящей технологии. Например, транспортное средство 220 может представлять собой водное судно, такое как лодка, или воздушное судно, такое как беспилотный летательный аппарат.
[00070] Транспортное средство 220 может представлять собой управляемое пользователем или безоператорное транспортное средство. По меньшей мере в некоторых вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может реализовываться как беспилотный автомобиль (SDC). Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, причем эти конкретные параметры включают в себя: производителя транспортных средств, модель транспортного средства, год изготовления транспортного средства, вес транспортного средства, габариты транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип приводной передачи (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[00071] Реализация электронного устройства 210 не ограничена конкретным образом, но в качестве примера, электронное устройство 210 может реализовываться как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшетный компьютер, персональный компьютер, встроенный в транспортное средство 220, и т.п. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно связано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может реализовываться в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В конкретных вариантах осуществления электронное устройство 210 имеет дисплей 270.
[00072] Электронное устройство 210 может содержать часть или все компоненты компьютерной системы 100, проиллюстрированной на фиг. 1. В конкретных вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессор 110, полупроводниковый накопитель 120 и запоминающее устройство 130. Другими словами, электронное устройство 210 содержит аппаратные средства и/или программное обеспечение, и/или микропрограммное обеспечение либо комбинацию вышеозначенного для обработки данных, как подробнее описано ниже.
[00073] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть связи может реализовываться как любая подходящая локальная вычислительная сеть (LAN), глобальная вычислительная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации для сети связи предназначаются только для целей иллюстрации. То, как реализуется линия связи (без отдельной ссылки с номером) между электронным устройством 210 и сетью 240 связи, должно зависеть, в числе прочего, от того, как реализуется электронное устройство 210. Просто в качестве примера, а не в качестве ограничения, в тех вариантах осуществления настоящей технологии, в которых электронное устройство 210 реализуется как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может реализовываться как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но не только, линию сети связи 3G, линию сети связи 4G и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
[00074] В некоторых вариантах осуществления настоящей технологии сервер 235 реализуется как компьютер-сервер и может содержать часть или все компоненты компьютерной системы 100 по фиг. 1. В одном неограничивающем примере, сервер 235 реализуется как сервер Dell™ PowerEdge™ под управлением операционной системы Windows Server™ Microsoft™, но также может реализовываться в любых других подходящих аппаратных средствах, программном обеспечении и/или микропрограммном обеспечении либо в комбинации вышеозначенного. В проиллюстрированных неограничивающих вариантах осуществления настоящей технологии сервер представляет собой один сервер. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны) функциональность сервера 235 может распределяться и может реализовываться через несколько серверов.
[00075] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235, чтобы принимать одно или более обновлений. Обновления могут представлять собой, но не только, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления прогноза погоды и т.п. В некоторых вариантах осуществления настоящей технологии процессор 110 также может быть выполнен с возможностью передавать на сервер 235 определенные рабочие данные, такие как проезжаемые маршруты, данные трафика, данные рабочих характеристик и т.п. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут шифроваться и/или анонимизироваться.
[00076] Следует отметить, что множество датчиков и систем могут использоваться посредством электронного устройства 210 для сбора информации относительно окрестностей транспортного средства 220. Как видно на фиг. 2, транспортное средство 220 может оснащаться множеством систем 280 датчиков. Следует отметить, что различные системы датчиков из множества систем 280 датчиков могут использоваться для сбора различных типов данных относительно окрестностей 250 транспортного средства 220.
[00077] В одном примере, множество систем 280 датчиков могут содержать одну или более систем датчиков с камерой, которые монтируются на транспортном средстве 220 и соединяются с возможностью связи с процессором 110. Вообще говоря, одна или более систем датчиков с камерой могут быть выполнены с возможностью собирать данные изображений относительно различных участков окрестностей 250 транспортного средства 220. В некоторых случаях, данные изображений, предоставленные посредством одной или более систем датчиков с камерой, могут использоваться посредством электронного устройства 210 для выполнения процедур обнаружения объектов. Например, электронное устройство 210 может быть выполнено с возможностью подавать данные изображений, предоставленные посредством одной или более систем датчиков с камерой, в нейронную сеть для обнаружения объектов (ODNN), которая обучена с возможностью локализовать и классифицировать потенциальные объекты в окрестностях 250 транспортного средства 220.
[00078] В другом примере, множество систем 280 датчиков могут содержать одну или более систем радарных датчиков, которые монтируются на транспортном средстве 220 и соединяются с возможностью связи с процессором 110. Вообще говоря, одна или более систем радарных датчиков могут быть выполнены с возможностью использовать радиоволны для того, чтобы собирать данные относительно различных участков окрестностей 250 транспортного средства 220. Например, одна или более систем радарных датчиков могут быть выполнены с возможностью собирать радарные данные относительно потенциальных объектов в окрестностях 250 транспортного средства 220, и причем эти данные могут представлять дистанцию объектов от системы радарных датчиков, ориентацию объектов, векторная скорость (velocity) и/или скалярная скорость (speed) объектов и т.п.
[00079] Следует отметить, что множество систем 280 датчиков могут содержать дополнительные типы систем датчиков в дополнение к типам, неисчерпывающе описанным выше, и без отступления от объема настоящей технологии.
[00080] Кроме того, транспортное средство 220 оснащается одной или более (лидарных) систем 230 оптического обнаружения и дальнометрии для сбора информации относительно окрестностей 250 транспортного средства 220. Лидарная система 230 может использоваться в дополнение или, в некоторых случаях, вместо множества систем 280 датчиков. Данная лидарная система 230 из одной или более лидарных систем 230 может монтироваться (или модернизироваться) на транспортном средстве 220 во множестве местоположений и/или во множестве конфигураций.
[00081] Например, данная лидарная система 230 может монтироваться на внутреннем верхнем участке ветрового стекла транспортного средства 220. Тем не менее, как проиллюстрировано на фиг. 2, другие местоположения для монтажа данной лидарной системы 230 находятся в пределах объема настоящего раскрытия сущности, в том числе заднее окно, боковые окна, передний капот, крыша, решетка радиатора, передний бампер или бок транспортного средства 220. В некоторых случаях, данная лидарная система 230 может даже монтироваться в выделенном корпусе, смонтированном на верхушке транспортного средства 220.
[00082] Как упомянуто выше, одна или более лидарных систем 230 также могут монтироваться во множестве конфигураций.
[00083] В одном варианте осуществления данная лидарная система 230 из одной или более лидарных систем 230, которая проиллюстрирована на фиг. 2 как смонтированная на крыше транспортного средства 220, может монтироваться таким способом во вращающейся конфигурации. Например, данная лидарная система 230, смонтированная на транспортном средстве 220 во вращающейся конфигурации, может содержать по меньшей мере некоторые компоненты, которые являются вращающимися на 360 градусов вокруг оси вращения данной лидарной системы 230. Следует отметить, что данная лидарная система 230, смонтированная во вращающихся конфигурациях, может собирать данные относительно большинства участков окрестностей 250 транспортного средства 220.
[00084] В другом варианте осуществления данная лидарная система 230 из одной или более лидарных систем 230, которая монтируется сбоку (или, например, на решетке радиатора) транспортного средства 220, может монтироваться таким способом в невращающейся конфигурации. Например, данная лидарная система 230, смонтированная на транспортном средстве 220 в невращающейся конфигурации, может содержать по меньшей мере некоторые компоненты, которые не являются вращающимися на 360 градусов и выполнены с возможностью собирать данные относительно предварительно определенных участков окрестностей 250 транспортного средства 220.
[00085] Независимо от конкретного местоположения и/или конкретной конфигурации, данная лидарная система 230 выполнена с возможностью захватывать данные относительно окрестностей 250 транспортного средства 220 для компоновки многомерной карты объектов в окрестностях 250 транспортного средства 220. Ниже описывается то, как данная одна или более лидарных систем 230 выполнены с возможностью захватывать данные относительно окрестностей 250 транспортного средства 220.
Лидарная система
[00086] Со ссылкой на фиг. 3 проиллюстрирован неограничивающий пример лидарной системы 310. Следует отметить, что одна или более лидарных систем 230 (см. фиг. 2) могут реализовываться аналогично реализации лидарной системы 310.
[00087] Вообще говоря, лидарная система 310 может содержать множество внутренних компонентов, таких как, но не только: (i) компонент 312 источника излучения, к примеру, компонент источника света, (ii) компонент 316 сканера, (iii) компонент 318 приемного устройства (также упоминаемый в данном документе в качестве системы обнаружения) и (iv) компонент 320 контроллера. Предполагается, что в дополнение к внутренним компонентам, неисчерпывающе упомянутым выше, лидарная система 310 дополнительно может содержать множество датчиков (таких как, например, температурный датчик, датчик содержания влаги и т.д.), которые опускаются из фиг. 3 для понятности.
[00088] Предполагается, что в некоторых случаях, один или более внутренних компонентов лидарной системы 310 могут реализовываться в общем корпусе 340, как проиллюстрировано на фиг. 3. В других реализациях по меньшей мере компонент 320 контроллера может быть расположен удаленно от общего корпуса 340.
Компонент источника излучения
[00089] Компонент 312 источника излучения соединяется с возможностью связи с компонентом 320 контроллера и выполнен с возможностью испускать излучение, такое как сигнал излучения в форме луча. В конкретных вариантах осуществления компонент 312 источника излучения выполнен с возможностью испускать свет, и упоминается в данном документе как компонент 312 источника света. Компонент 312 источника света содержит один или более лазеров, которые испускают свет, имеющий конкретную рабочую длину волны. Рабочая длина волны компонента 312 источника света может находиться в инфракрасном, видимом и/или ультрафиолетовом участках электромагнитного спектра. Например, компонент 312 источника света может включать в себя один или более лазеров с рабочей длиной волны около между 650 нм и 1150 нм. Альтернативно, источник света может включать в себя лазерный диод, выполненный с возможностью испускать свет при длине волны около между 800 нм и 1000 нм, около между 850 нм и 950 нм или около между 1300 нм и 1600 нм. Тем не менее, следует отметить, что компонент 312 источника света может включать в себя лазеры с различными рабочими длинами волны, без отступления от объема настоящей технологии. В конкретных других вариантах осуществления компонент 312 источника света содержит светоизлучающий диод (светодиод).
[00090] При работе, компонент 312 источника света формирует выходной луч 322 света. Предполагается, что выходной луч 322 может иметь любую подходящую форму, такую как незатухающая волна или импульсы. Как проиллюстрировано на фиг. 3, выходной луч 322 выходит из лидарной системы 310 и направляется в направлении от начала тракта к окрестностям 250.
[00091] Допустим, что объект 330 расположен на дистанции 390 от лидарной системы 310. Тем не менее, следует отметить, что как подробнее поясняется ниже, присутствие объекта 330 и дистанция 390 не известны априори, и что цель лидарной системы 310 состоит в том, чтобы находить объект 330 и/или захватывать данные для компоновки многомерной карты по меньшей мере участка окрестностей 250 с представлением объекта 330 (и других потенциальных объектов) на ней в форме одной или более точек данных.
[00092] После того как выходной луч 322 достигает объекта 330, объект 330 может отражать по меньшей мере участок света из выходного луча 322, и некоторые отраженные световые лучи могут возвращаться обратно к лидарной системе 310. Под словом "отраженный" подразумевается то, что по меньшей мере участок светового луча из выходного луча 322 отскакивает от объекта 330. Участок светового луча из выходного луча 322 может поглощаться посредством объекта 330.
[00093] В примере, проиллюстрированном на фиг. 3, отраженный световой луч представляется посредством входного луча 324. Входной луч 324 захватывается посредством лидарной системы 310 через компонент 318 приемного устройства. Следует отметить, что в некоторых случаях, входной луч 324 может содержать только относительно небольшую фракцию света из выходного луча 322. Также следует отметить, что угол входного луча 324 относительно поверхности объекта 330 ("угол падения") может быть идентичным или отличающимся от угла выходного луча 322 относительно поверхности объекта 330 ("угла отражения").
[00094] Также следует отметить, что рабочая длина волны лидарной системы 310 может находиться в участках электромагнитного спектра, которые соответствуют свету, сформированному посредством солнца. Следовательно, в некоторых случаях, солнечный свет может выступать в качестве фонового шума, который может затемнять световой сигнал, обнаруженный посредством лидарной системы 310. Этот солнечный фоновый шум может приводить к ложноположительным обнаружениям и/или может иным образом нарушать измерения лидарной системы 310. Хотя может быть осуществимым увеличивать отношение "сигнал-шум" (SNR) лидарной системы 310 посредством увеличения уровня мощности выходного луча 322, это может быть нежелательным по меньшей мере в некоторых ситуациях. Например, увеличение уровней мощности выходного луча 322 может приводить к небезопасности лидарной системы 310 для глаз.
[00095] Предполагается, что лидарная система 310 может содержать безопасный для глаз лазер, или, другими словами, лидарная система 310 может классифицироваться в качестве безопасной для глаз лазерной системы или лазерного продукта. Вообще говоря, безопасный для глаз лазер, лазерная система или лазерный продукт может представлять собой систему с частью или всем из следующего: длина волны испускания, средняя мощность, пиковая мощность, пиковая интенсивность, энергия импульса, размер луча, расходимость луча, время экспозиции или сканированный выходной луч таким образом, что испускаемый свет из этой системы представляет минимальную вероятность вызывания повреждения глаз пользователя.
[00096] Как упомянуто выше, компонент 312 источника света может включать в себя один или более импульсных лазеров, выполненных с возможностью формировать, испускать или излучать световые импульсы с определенной длительностью импульса. Например, компонент 312 источника света может быть выполнен с возможностью испускать импульсы с длительностью импульса (например, с шириной импульса) в пределах от 10 пс до 100 нс. В другом примере, компонент 312 источника света может испускать импульсы на частоте повторения импульсов около от 100 кГц до 5 МГц или с периодом повторения импульсов (например, временем между последовательными импульсами) около от 200 нс до 10 мкс. Тем не менее, в целом, компонент 312 источника света может формировать выходной луч 322 с любой подходящей средней оптической мощностью, и выходной луч 322 может включать в себя оптические импульсы с любой подходящей энергией импульса или пиковой оптической мощностью для данного варианта применения.
[00097] В некоторых вариантах осуществления компонент 312 источника света может содержать один или более лазерных диодов, таких как, но не только: лазерный диод с резонатором Фабри-Перо, лазер на квантовых ямах, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер на основе поверхностного излучения с вертикальным резонатором (VCSEL). Только в качестве примеров, данный лазерный диод, работающий в компоненте 312 источника света, может представлять собой лазерный диод на арсениде алюминия-галлия (AlGaAs), лазерный диод на арсениде индия-галлия (InGaAs) или лазерный диод на фосфиде-арсениде индия-галлия (InGaAsP) либо любой другой подходящий лазерный диод. Также предполагается, что компонент 312 источника света может включать в себя один или более лазерных диодов, которые модулируются с помощью тока, чтобы формировать оптические импульсы. В некоторых вариантах осуществления компонент 312 источника света может быть волоконно-лазерным источником.
[00098] В некоторых вариантах осуществления выходной луч 322, испускаемый посредством компонента 312 источника света, представляет собой коллимированный оптический луч с любой подходящей расходимостью луча для данного варианта применения. Вообще говоря, расхождение выходного луча 322 представляет собой угловую меру увеличения размера луча (например, радиус луча или диаметр луча) по мере того, как выходной луч 322 движется в направлении от компонента 312 источника света или лидарной системы 310. В некоторых вариантах осуществления выходной луч 322 может иметь практически круглое поперечное сечение.
[00099] Также предполагается, что выходной луч 322, испускаемый посредством компонента 312 источника света, может не иметь поляризации или иметь случайную поляризацию, может не иметь конкретной или фиксированной поляризации (например, поляризация может варьироваться во времени), или может иметь конкретную поляризацию (например, выходной луч 322 может иметь линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[000100] По меньшей мере в некоторых вариантах осуществления выходной луч 322 и входной луч 324 могут быть практически коаксиальными. Другими словами, выходной луч 322 и входной луч 324 могут по меньшей мере частично перекрывать или совместно использовать общую ось распространения таким образом, что входной луч 324 и выходной луч 322 движутся практически по идентичному оптическому тракту (хотя в противоположных направлениях). Тем не менее, в других вариантах осуществления предполагается, что выходной луч 322 и входной луч 324 могут не быть коаксиальными либо, другими словами, могут не перекрывать или совместно использовать общую ось распространения внутри лидарной системы 310, без отступления от объема настоящей технологии.
[000101] Следует отметить, что по меньшей мере в некоторых вариантах осуществления настоящей технологии компонент 312 источника света может быть вращающимся, к примеру, на 360 градусов или меньше, вокруг оси вращения (не проиллюстрирована) лидарной системы 310, когда лидарная система 310 реализуется во вращающейся конфигурации. Тем не менее, в других вариантах осуществления компонент 312 источника света может быть стационарным, даже когда лидарная система 310 реализуется во вращающейся конфигурации, без отступления от объема настоящей технологии.
Внутренние тракты луча
[000102] Как схематично проиллюстрировано на фиг. 3, лидарная система 310 может использовать данный внутренний тракт луча из множества внутренних трактов 314 луча для испускания выходного луча 322 (сформированного посредством компонента 312 источника света) к окрестностям 250. В одном примере, данный внутренний тракт луча из множества внутренних трактов 314 луча может обеспечивать возможность предоставления света из компонента 312 источника света в компонент 316 сканера, и в свою очередь, компонент 316 сканера может обеспечивать возможность направления выходного луча 322 в направлении от начала тракта к окрестностям 250.
[000103] Кроме того, лидарная система 310 может использовать другой данный внутренний тракт луча из множества внутренних трактов 314 луча для предоставления входного луча 324 в компонент 318 приемного устройства. В одном примере, другой данный внутренний тракт луча из множества внутренних трактов 314 луча может обеспечивать возможность предоставления входного луча 324 из компонента 316 сканера в компонент 318 приемного устройства. В другом примере, другой данный внутренний тракт луча из множества внутренних трактов 314 луча может обеспечивать возможность предоставления входного луча 324 непосредственно из окрестностей 250 в компонент 318 приемного устройства (без прохождения входного луча 324 через компонент 316 сканера).
[000104] Следует отметить, что множество внутренних трактов 314 луча могут содержать множество оптических компонентов. Например, лидарная система 310 может включать в себя один или более оптических компонентов, выполненных с возможностью преобразовывать и согласовывать, придавать форму, фильтровать, модифицировать, управлять или направлять выходной луч 322 и/или входной луч 324. Например, лидарная система 310 может включать в себя одну или более линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, расщепителей луча, поляризаторов, поляризационных расщепителей луча, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических (MEM) элементов, коллимирующих элементов или голографических элементов.
[000105] Предполагается, что по меньшей мере в некоторых вариантах осуществления данный внутренний тракт луча и другой внутренний тракт луча из множества внутренних трактов 314 луча могут совместно использовать по меньшей мере некоторые общие оптические компоненты; тем не менее, это может не иметь место в каждом варианте осуществления настоящей технологии.
Компонент сканера
[000106] Вообще говоря, компонент 316 сканера управляет выходным лучом 322 в одном или более направлений в направлении от начала тракта к окрестностям 250. Компонент 316 сканера может содержать множество оптических компонентов и/или механических компонентов для выполнения сканирования выходного луча 322. Например, компонент 316 сканера может включать в себя одно или более зеркал, призм, линз, MEM-компонентов, пьезоэлектрических компонентов, оптических волокон, расщепителей, дифракционных элементов, коллимирующих элементов и т.п. Следует отметить компонент 316 сканера также может включать в себя один или более актуаторов (не проиллюстрированы), приводящих в действие по меньшей мере некоторые оптические компоненты, например, с возможностью вращаться, наклоняться, поворачиваться или перемещаться угловым способом относительно одной или более осей.
[000107] Компонент 316 сканера может быть выполнен с возможностью сканировать выходной луч 322 во множестве горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов. Другими словами, компонент 316 сканера может содействовать предоставлению в лидарную систему 310 требуемой интересующей области 380 (ROI). ROI 380 лидарной системы 310 может означать площадь, объем, область, угловой диапазон и/или участок(ки) окрестностей 250, в отношении которых лидарная система 310 может быть выполнена с возможностью сканировать и/или может захватывать данные.
[000108] Следует отметить, что компонент 316 сканера может быть выполнен с возможностью сканировать выходной луч 322 горизонтально и/или вертикально, и, по сути, ROI 380 лидарной системы 310 может иметь горизонтальное направление и вертикальное направление. Например, лидарная система 310 может иметь горизонтальную ROI в 360 градусов и вертикальную ROI в 45 градусов.
[000109] Компонент 316 сканера может соединяться с возможностью связи с компонентом 320 контроллера. В связи с этим компонент 320 контроллера может быть выполнен с возможностью управлять компонентом 316 сканера таким образом, чтобы направлять выходной луч 322 в требуемом направлении в направлении от начала тракта и/или вдоль требуемого шаблона сканирования. Вообще говоря, шаблон сканирования может означать шаблон или тракт, вдоль которого выходной луч 322 направляется посредством компонента 316 сканера в ходе работы.
[000110] Лидарная система 310 в силу этого может использовать шаблон сканирования для того, чтобы формировать облако точек, практически покрывающее ROI 380 лидарной системы 310. Как подробнее описывается в данном документе ниже, это облако точек лидарной системы 310 может использоваться для того, чтобы подготавливать посредством рендеринга многомерную карту объектов в окрестностях 250 транспортного средства 220.
[000111] При работе в конкретных вариантах осуществления компонент 312 источника света испускает световые импульсы (представленные посредством выходного луча 322), которые компонент 316 сканера сканирует по ROI 380 лидарной системы 310 в соответствии с шаблоном сканирования. Как упомянуто выше, объект 330 может отражать один или более испускаемых импульсов. Компонент 318 приемного устройства принимает или обнаруживает фотоны из входного луча 324 и формирует один или более характерных сигналов данных. Например, компонент 318 приемного устройства может формировать выходной электрический сигнал (не проиллюстрирован), который представляет входной луч 324. Компонент 318 приемного устройства также может предоставлять такой сформированный электрический сигнал в компонент 320 контроллера для последующей обработки.
Компонент приемного устройства
[000112] Компонент 318 приемного устройства соединяется с возможностью связи с компонентом 320 контроллера и может реализовываться множеством способов. Например, компонент 318 приемного устройства может содержать фотоприемное устройство, оптическое приемное устройство, оптический датчик, детектор, фотодетектор, оптический детектор, оптоволокна и т.п. Как упомянуто выше, в некоторых вариантах осуществления компонент 318 приемного устройства получает или обнаруживает по меньшей мере участок входного луча 324 и формирует электрический сигнал, который соответствует входному лучу 324. Например, если входной луч 324 включает в себя оптический импульс, компонент 318 приемного устройства может формировать импульс электрического тока или напряжения, который соответствует оптическому импульсу, обнаруженному посредством компонента 318 приемного устройства.
[000113] Предполагается, что компонент 318 приемного устройства может реализовываться с одним или более лавинных фотодиодов (APD), одним или более однофотонных лавинных диодов (SPAD), одним или более p-n-фотодиодов (например, как фотодиодная структура, сформированная посредством полупроводника с каналом p-типа и полупроводника с каналом n-типа), одним или более p-i-n-фотодиодов (например, как фотодиодная структура, сформированная посредством нелегированной собственной полупроводниковой области, расположенной между областями с каналом p-типа и с каналом n-типа) и т.п.
[000114] В некоторых неограничивающих вариантах осуществления компонент 318 приемного устройства также может содержать схему, которая выполняет усиление сигнала, дискретизацию, фильтрацию, преобразование и согласование сигналов, аналого-цифровое преобразование, время-цифровое преобразование, обнаружение импульсов, пороговое обнаружение, обнаружение переднего фронта, обнаружение заднего фронта и т.п. Например, компонент 318 приемного устройства может включать в себя электронные компоненты, выполненные с возможностью преобразовывать принимаемый фототок (например, ток, сформированный посредством APD в ответ на принимаемый оптический сигнал) в сигнал напряжения. Компонент 318 приемного устройства также может включать в себя дополнительную схему для формирования аналогового или цифрового выходного сигнала, который соответствует одной или более характеристик (например, переднему фронту, заднему фронту, амплитуде, длительности и т.п.) принимаемого оптического импульса.
Компонент контроллера
[000115] В зависимости от реализации, компонент 320 контроллера может включать в себя один или более процессоров, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA) и/или другую подходящую схему. Компонент 320 контроллера также может включать в себя энергонезависимое компьютерно-читаемое запоминающее устройство для того, чтобы сохранять инструкции, выполняемые посредством компонента 320 контроллера, а также данные, которые компонент 320 контроллера может формировать на основе сигналов, полученных из других внутренних компонентов лидарной системы 310, и/или может предоставлять сигналы в другие внутренние компоненты лидарной системы 310. Запоминающее устройство может включать в себя энергозависимые (например, RAM) и/или энергонезависимые (например, флэш-память, жесткий диск) компоненты. Компонент 320 контроллера может быть выполнен с возможностью формировать данные в ходе работы и сохранять их в запоминающем устройстве. Например, эти данные, сформированные посредством компонента 320 контроллера, могут указывать точки данных в облаке точек лидарной системы 310.
[000116] Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии компонент 320 контроллера может реализовываться аналогично электронному устройству 210 и/или компьютерной системе 100, без отступления от объема настоящей технологии.
[000117] В дополнение к сбору данных из компонента 318 приемного устройства, компонент 320 контроллера также может быть выполнен с возможностью предоставлять управляющие сигналы и потенциально принимать диагностические данные в/из компонента 312 источника света и компонента 316 сканера.
[000118] Как указано выше, компонент 320 контроллера соединяется с возможностью связи с одним или более из компонента 312 источника света, компонента 316 сканера и компонента 318 приемного устройства. Компонент 320 контроллера может принимать электрические инициирующие импульсы из компонента 312 источника света, причем каждый электрический инициирующий импульс соответствует испусканию оптического импульса посредством компонента 312 источника света. Компонент 320 контроллера дополнительно может предоставлять в компонент 312 источника света инструкции, управляющий сигнал и/или инициирующий сигнал, указывающие то, когда компонент 312 источника света должен формировать оптические импульсы.
[000119] Только в качестве примера, компонент 320 контроллера может быть выполнен с возможностью отправлять электрический инициирующий сигнал, который включает в себя электрические импульсы, так что компонент 312 источника света испускает оптический импульс в ответ на каждый электрический импульс электрического инициирующего сигнала. Также предполагается, что компонент 320 контроллера может вызвать регулирование одной или более характеристик света, сформированного посредством компонента 312 источника света, с помощью компонента 312 источника света, таких как, но не только: частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность и длина волны оптических импульсов.
[000120] Следует отметить, что компонент 320 контроллера может быть выполнен с возможностью определять значение "времени пролета" для оптического импульса на основе информации временной синхронизации, связанной с моментом, (i) когда данный импульс испущен посредством компонента 312 источника света, и с моментом, (ii) когда участок импульса (например, из входного луча 324) обнаружен или принят посредством компонента 318 приемного устройства.
[000121] Предполагается, что компонент 320 контроллера может быть выполнен с возможностью анализировать одну или более характеристик электрических сигналов из компонента 312 источника света и/или компонента 318 приемного устройства, чтобы определять одну или более характеристик объекта 330, таких как дистанция 390 в направлении от начала тракта от лидарной системы 310.
[000122] Например, компонент 320 контроллера может определять значение времени пролета и/или значение фазовой модуляции для испускаемого импульса выходного луча 322. Допустим, что лидарная система 310 определяет значение T времени пролета, представляющее, в некотором смысле, время "полного обхода" для движения испускаемого импульса из лидарной системы 310 в объект 330 и обратно в лидарную систему 310. Как результат, компонент 320 контроллера может быть выполнен с возможностью определять дистанцию 390 в соответствии со следующим уравнением:

где D является дистанцией 390, T является значением времени пролета, и c является скоростью света (около 3,0*108 м/с).
[000123] Как упомянуто выше, лидарная система 310 может использоваться для того, чтобы определять дистанцию до одного или более других потенциальных объектов, расположенных в окрестностях 250. Посредством сканирования выходного луча 322 по ROI 380 лидарной системы 310 в соответствии с шаблоном сканирования, лидарная система 310 выполнена с возможностью преобразовывать дистанции (аналогичные дистанции 390) в соответствующие точки данных внутри ROI 380 лидарной системы 310. Как результат, лидарная система 310 может быть выполнена с возможностью подготавливать посредством рендеринга эти точки данных, захваченные последовательно (например, как облако точек), в форме многомерной карты.
[000124] В качестве примера, эта многомерная карта может использоваться посредством электронного устройства 210 для обнаружения или другой идентификации объектов либо определения формы или дистанции потенциальных объектов внутри ROI 380 лидарной системы 310. Предполагается, что лидарная система 310 может быть выполнена с возможностью многократно/итеративно захватывать и/или формировать облака точек в любой подходящей скорости для данного варианта применения.
[000125] Следует отметить, что местоположение данного объекта в окрестностях 250 транспортного средства 220 может перекрываться, охватываться или заключаться по меньшей мере частично внутри ROI лидарной системы 310. Например, объект 330 может включать в себя все или участок человека, транспортного средства, мотоцикла, грузовика, поезда, велосипеда, инвалидного кресла, коляски, пешехода, животного, дорожного знака, светофора, разделительной линии, разметки поверхности дороги, места для парковки, опоры линии электропередач, дорожного ограждения, шлагбаума, выбоины, железнодорожного переезда, препятствия на или около дороги, бордюра, остановленного транспортного средства на или рядом с дорогой, столба линии электропередач, дома, здания, мусорного бака, почтового ящика, дерева, любого другого подходящего объекта либо любой подходящей комбинации всех или части двух или более объектов.
Конкретные системные компоненты
[000126] Со ссылкой на фиг. 4 проиллюстрирована реализация лидарной системы 310, выполняемой в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии.
[000127] Более конкретно в лидарной системе 310 компонент 312 источника света содержит лазерный источник 402 и коллиматор 404, компонент 316 сканера содержит MEM-компонент 406, и компонент 318 приемного устройства содержит оптический фильтр 412 (также упоминаемый в данном документе в качестве компонента фильтрации), приемную линзу 414 и оптический детектор 416. Следует отметить, что другие элементы могут присутствовать, но не иллюстрируются для целей упрощения.
[000128] Лазерный источник 402 выполнен с возможностью формировать выходной луч 322. В конкретных вариантах осуществления сформированный выходной луч 322 содержит множество последовательных выходных лучей 408. Дополнительно каждый выходной луч 408 может коллимировать и/или модулироваться посредством коллиматора 404. Как пояснено выше, лидарная система 310 может использовать данный внутренний тракт луча из множества внутренних трактов 314 луча для испускания выходного луча 408 к ROI 380.
[000129] В одном примере, данный внутренний тракт луча из множества внутренних трактов 314 луча может обеспечивать возможность предоставления коллимированного и/или модулированного выходного луча(ей) 408 из коллиматора 404 к MEM-компоненту 406, связанному с компонентом 316 сканера. MEM-компонент 406 имеет отражающую поверхность 480, которая выполнена с возможностью принимать и отражать коллимированный и/или модулированный выходной луч(и) 408 к ROI 380.
[000130] В конкретных вариантах осуществления MEM-компонент 406 выполнен с возможностью перемещаться, к примеру, посредством одного или более из наклона, раскачивания и/или колебания согласно одному или более направлений, или углов (например, вертикально, горизонтально, диагонально либо в комбинации вышеозначенного), как указано посредством направлений 420 и 422. Таким образом, MEM-компонент 406, например, отражает выходной(-ые) луч(-и) 408 и перенаправляет их под несколькими углами (например, вертикальными и/или горизонтальными углами) в качестве выходных лучей 424 и 426. Следует отметить, что, хотя выходные лучи 424 и 426 проиллюстрированы в одномерной вертикальной плоскости, перемещение MEM-компонента 406 также может распространять выходной(-ые) луч(-и) 408 в одномерной горизонтальной плоскости либо как в вертикальной, так и в горизонтальной плоскостях, что приводит к двумерной ROI 380. Аналогично, угол 428 распространения между выходными лучами 424 и 426 может представлять собой плоский угол или телесный угол в зависимости от распространения в одном измерении или в двух измерениях. В качестве примера, диапазон угла, будь то плоский угол или телесный угол, может составлять в промежутке от 15 до 60 градусов.
[000131] Предполагается, что в конкретных вариантах осуществления лидарная система 310 может быть выполнена с возможностью вращаться горизонтально, чтобы сканировать ROI 380, в то время как MEM-компонент 406 предназначен наклоняться, раскачиваться и/или колебаться согласно нескольким направлениям или углам (например, вертикально, горизонтально, диагонально либо в комбинации вышеозначенного), чтобы обеспечивать возможность лазерному источнику 402 испускать выходной(-ые) луч(-и) 408 под несколькими углами, чтобы получать несколько угловых разрешений одного или более объектов 430. В других вариантах осуществления MEM-компонент 406 может размещаться на платформе (не показана) таким образом, что платформа может быть выполнена с возможностью вращаться на горизонтальной плоскости. В качестве примера, такая платформа может быть расположена внутри лидарной системы 310 или может составлять часть общего корпуса 340. В других вариантах осуществления одно или более из компонента 316 сканера или MEM-компонента выполнено с возможностью вращаться горизонтально.
[000132] Таким образом, вследствие перемещения MEM-компонента 406, отраженные выходные лучи 424 и 426 могут использоваться для того, чтобы извлекать несколько угловых разрешений объекта. Как результат, в конкретных вариантах осуществления только одна лидарная система 310 может сканировать и захватывать несколько угловых разрешений объекта. Число лидарных систем (или число источников света и световых детекторов), требуемых для того, чтобы сканировать объект, может уменьшаться, и затраты на работу SDC также могут уменьшаться.
[000133] Как пояснено выше, лидарная система 310 может использовать данный внутренний тракт луча из множества внутренних трактов 314 луча для испускания выходного луча 322 (сформированного посредством компонента 312 источника света) к окрестностям 250.
[000134] Предполагается, что по меньшей мере участок выходных лучей 424 и 426 может отражаться посредством одного или более объектов 430 в ROI 380. Такой отраженный участок выходных лучей 424 и 426 представляется посредством входных лучей 432 и 434 и может возвращаться обратно к лидарной системе 310. Входные лучи 432 и 434 захватываются посредством лидарной системы 310 через компонент 318 приемного устройства.
[000135] В конкретных вариантах осуществления лидарная система 310 может использовать другой данный внутренний тракт луча из множества внутренних трактов 314 луча для предоставления входных лучей 432 и 434 в компонент 318 приемного устройства. В одном примере, другой данный внутренний тракт луча из множества внутренних трактов 314 луча может обеспечивать возможность предоставления входных лучей 432 и 434 из компонента 316 сканера в компонент 318 приемного устройства. В другом примере, другой данный внутренний тракт луча из множества внутренних трактов 314 луча может обеспечивать возможность предоставления входных лучей 432 и 434 непосредственно из ROI 380 в компонент 318 приемного устройства (без прохождения входных лучей 432 и 434 через компонент 316 сканера).
[000136] По меньшей мере в некоторых вариантах осуществления обратная трасса, связанная с входными лучами 432 и 434, отраженными от ROI 380 в компонент 318 приемного устройства, может включать в себя подучасток, который представляет собой тракт, идентичный тракту, используемому посредством выходных лучей 424 и 426. Другими словами, выходные лучи 424 и 426 и входные лучи 432 и 434 могут по меньшей мере частично перекрывать или совместно использовать общую ось распространения таким образом, что входные лучи 432 и 434 и выходные лучи 424 и 426 движутся практически по идентичному оптическому тракту (хотя и в противоположных направлениях). Тем не менее, в других вариантах осуществления предполагается, что выходные лучи 424 и 426 и входные лучи 432 и 434 могут включать в себя подучасток, который представляет собой тракт, отличающийся от тракта, используемого посредством выходных лучей 424 и 426, либо другими словами, входные лучи 432 и 434 и выходные лучи 424 и 426 могут не перекрывать или совместно использовать общую ось распространения внутри лидарной системы 310, без отступления от объема настоящей технологии.
[000137] Компонент 412 фильтрации, используемый в компоненте 318 приемного устройства, может быть выполнен с возможностью принимать входные лучи 432 и 434 и отфильтровывать фоновый шум (если имеется) во входных лучах 432 и 434 из обнаружения посредством оптического детектора 416. В одном неограничивающем варианте осуществления компонент 412 фильтрации может включать одно зеркало полосового фильтра. Тем не менее, в другом неограничивающем варианте осуществления компонент 412 фильтрации может включать множество зеркал полосового фильтра, имеющих связанные полосы пропускания фильтра, центрированные относительно рабочей частоты выходных лучей 424 и 426. Выходные лучи 424 и 426 могут демонстрировать высокое внеполосное отклонение, а также низкое внутриполосное ослабление. Дополнительно полоса пропускания, связанная с компонентом 412 фильтрации, может быть достаточно узкой таким образом, чтобы практически отфильтровывать или удалять компоненты солнечного излучения или рассеянного света во входных лучах 432 и 434, при этом достаточно широкой таким образом, что она существенно превышает полосу пропускания термически расширенного спектра в комбинации с наибольшим ожидаемым связанным доплеровским сдвигом. Например, в конкретных вариантах осуществления компонент 412 фильтрации может быть выполнен с возможностью предоставлять максимальную фильтрацию световых частот, которые находятся за пределами интересующей полосы частот, например, больше около 2 нанометров (нм) выше или ниже номинальной центральной частоты выходных лучей 424 и 426.
[000138] Фильтрованные входные лучи 432 и 434 затем могут перенаправляться в приемную линзу 414 для дополнительной обработки. Приемная линза 414 может быть выполнена с возможностью фокусировать фильтрованные входные лучи 432 и 434 в оптический детектор 416. Следует отметить, что в конкретных вариантах осуществления лидарная система 310 с использованием подходящего внутреннего тракта луча из множества внутренних трактов 314 луча может непосредственно предоставлять входные лучи 432 и 434 в приемную линзу 414 без их прохождения через компонент 412 фильтрации. В некоторых других вариантах осуществления лидарная система 310 с использованием подходящего внутреннего тракта луча из множества внутренних трактов 314 луча может непосредственно предоставлять входные лучи 432 и 434 в оптический детектор 416 без их прохождения через компонент 412 фильтрации или приемную линзу 414.
[000139] Фиг. 5 иллюстрирует характерную реализацию оптического детектора, выполняемого в соответствии с конкретным неограничивающим вариантом осуществления настоящей технологии. Как проиллюстрировано, в конкретных вариантах осуществления оптический детектор 416 может использовать волоконно-оптическую матрицу 440 и множество детекторов 446-1, 446-2, …, 446-N. Множество детекторов 446-1, 446-2, …, 446-N соответствуют "один-к-одному" N оптоволокон, связанных с волоконно-оптической матрицей 440, и каждый детектор во множестве детекторов 446-1, 446-2, …, 446-N может быть выполнен с возможностью принимать входные лучи 432 и 434 через волоконно-оптическую матрицу 440. В связи с этим N оптоволокон, связанных с волоконно-оптической матрицей 440, могут соединяться с множеством детекторов 446-1, 446-2, …, 446-N, чтобы формировать N оптических трактов 448-1, 448-2, …, 448-N из волоконно-оптической матрицы 440 во множество детекторов 446-1, 446-2, …, 446-N.
[000140] В конкретных вариантах осуществления оптический детектор 416 также может включать в себя волоконно-оптический разъем 442 и множество микролинз 444-1, 444-2, …, 444-N. Волоконно-оптический разъем 442 может быть выполнен с возможностью соединять N оптоволокон, связанных с волоконно-оптической матрицей 440, со множеством детекторов 446-1, 446-2, …, 446-N, чтобы формировать N оптических трактов 448-1, 448-2, …, 448-N из волоконно-оптической матрицы 440 во множество детекторов 446-1, 446-2, …, 446-N. Множество микролинз 444-1, 444-2, …, 444-N соответствуют "один-к-одному" множеству детекторов 446-1, 446-2, …, 446-N и могут быть выполнены с возможностью обеспечивать схождение входных лучей 432 и 434, передаваемых через N оптоволокон, связанных с волоконно-оптической матрицей 440 с соответствующим множеством детекторов 446-1, 446-2, …, 446-N. В качестве примера, волоконно-оптическая матрица 440 может представлять собой одномерную волоконно-оптическую матрицу или двумерную волоконно-оптическую матрицу. Концевая поверхность волоконно-оптической матрицы 440 может находиться на фокусной плоскости приемной линзы 414.
[000141] Как пояснено выше, в конкретных вариантах осуществления множество детекторов 446-1, 446-2, …, 446-N могут быть выполнены с возможностью обнаруживать по меньшей мере участок входных лучей 432 и 434 и формировать электрический сигнал, который соответствует входным лучам 432 и 434. Например, если входные лучи 432 и 434 включают в себя оптический импульс, множество детекторов 446-1, 446-2, …, 446-N могут формировать электрические сигналы 470, к примеру, импульсы электрического тока или напряжения, которые соответствуют оптическим импульсам, обнаруженным посредством множества детекторов 446-1, 446-2, …, 446-N.
[000142] Предполагается, что множество детекторов 446-1, 446-2, …, 446-N могут реализовываться с одним или более лавинных фотодиодов (APD), одним или более однофотонных лавинных диодов (SPAD), одним или более p-n-фотодиодов (например, как фотодиодная структура, сформированная посредством полупроводника с каналом p-типа и полупроводника с каналом n-типа), одним или более p-i-n-фотодиодов (например, как фотодиодная структура, сформированная посредством нелегированной собственной полупроводниковой области, расположенной между областями с каналом p-типа и с каналом n-типа) и т.п.
[000143] В конкретных вариантах осуществления множество детекторов 446-1, 446-2, …, 446-N могут соединяться с возможностью связи с компонентом 320 контроллера. Компонент 320 контроллера может быть выполнен с возможностью принимать электрические сигналы 470 из множества детекторов 446-1, 446-2, …, 446-N. Компонент 320 контроллера дополнительно может быть выполнен с возможностью анализировать электрические сигналы 470, чтобы обнаруживать один или более объектов 430 в ROI 380. Предполагается, что компонент 320 контроллера может использовать любые подходящие технологии (к примеру, технологии на основе определения "времени пролета", как пояснено выше) для обнаружения объектов без отступления от принципов, представленных в данном документе.
[000144] Компонент 320 контроллера дополнительно может соединяться с возможностью связи с компонентом 316 сканера, более конкретно, с MEM-компонентом 406, чтобы управлять перемещением MEM-компонента 406, и более конкретно, одной или более из амплитуд наклона, раскачивания и/или колебаний MEM-компонента 406. В частности, первоначально MEM-компонент 406 может колебаться относительно вертикальной оси с первой амплитудой колебаний, чтобы распространять выходные лучи 424 и 426 посредством вертикального интервала 504 (поясняется ниже) вдоль вертикальной оси в ROI 380. При обнаружении одного или более объектов 430 в ROI 380 на основе входных лучей 432 и 434, компонент 320 контроллера может быть выполнен с возможностью модулировать первую амплитуду колебаний MEM-компонента 406 для модулирования до первой модулированной амплитуды колебаний. Таким образом, компонент 320 контроллера уменьшает вертикальный интервал 504 (поясняется ниже) выходных лучей 424 и 426 вокруг одного или более объектов 430. В конкретных вариантах осуществления первая амплитуда колебаний превышает первую модулированную амплитуду колебаний. В связи с этим первая амплитуда колебаний располагается в диапазоне между +/-15 градусов, и первая модулированная амплитуда колебаний располагается в диапазоне между +/-14 градусов. Например, если первая амплитуда колебаний составляет 15 градусов, то первая модулированная амплитуда колебаний может составлять 14 градусов или 13 градусов либо около того.
[000145] В конкретных вариантах осуществления первоначально MEM-компонент 406 также может колебаться относительно горизонтальной оси со второй амплитудой колебаний, чтобы распространять выходные лучи 424 и 426 посредством горизонтального интервала 514 (поясняется ниже) вдоль горизонтальной оси в ROI 380. При обнаружении одного или более объектов 430 в ROI 380 на основе входных лучей 432 и 434, компонент 320 контроллера может быть выполнен с возможностью модулировать вторую амплитуду колебаний MEM-компонента 406 для модулирования до второй модулированной амплитуды колебаний. Таким образом, компонент 406 MEM-контроллера уменьшает горизонтальный интервал 514 (поясняется ниже) выходных лучей 424 и 426 вокруг одного или более объектов 430. В конкретных вариантах осуществления вторая амплитуда колебаний превышает вторую модулированную амплитуду колебаний. В связи с этим вторая амплитуда колебаний располагается в диапазоне между +/-15 градусов, и вторая модулированная амплитуда колебаний располагается в диапазоне между +/-14 градусов. Например, если вторая амплитуда колебаний составляет 15 градусов, то вторая модулированная амплитуда колебаний может составлять 14 градусов или 13 градусов либо около того.
[000146] Компонент 320 контроллера дополнительно может соединяться с возможностью связи с компонентом 312 источника света таким образом, что испускание следующего выходного луча(ей) после испускания выходного луча 408 может координироваться с обнаружением входных лучей 432 и 434 посредством оптического детектора 416. В связи с этим компонент 320 контроллера может быть выполнен с возможностью вызывать испускание выходного луча(ей) компонентом 312 источника света после испускания выходного луча 408 после того, как обнаружены входные лучи 432 и 434.
[000147] Фиг. 6 и 7 иллюстрируют характерные примеры вертикального интервала и уменьшенного вертикального интервала, связанных с выходным лучом(ами) вдоль вертикальной оси, в соответствии с различными вариантами осуществления настоящей технологии. Как проиллюстрировано на фиг. 6, лидарная система 310 испускает выходной луч(и) 502, распространяющийся по вертикальному интервалу 504 в ROI 380. Дополнительно, как проиллюстрировано на фиг. 7, при обнаружении одного или более объектов 430 в ROI 380, лидарная система 310 может быть выполнена с возможностью уменьшать распространение выходного луча(ей) 502. Выходной луч(и) 502 с уменьшенным распространением теперь представляется в качестве выходного луча(ей) 506. В связи с этим выходной луч(и) 506 теперь распространяется(ются) по уменьшенному вертикальному интервалу 508 вокруг одного или более объектов 430 в интересующей подобласти 510. Интересующая подобласть 510 находится внутри ROI 380.
[000148] Следует отметить, что в конкретных вариантах осуществления выходной луч(и) 502 может быть связан с первой амплитудой колебаний MEM-компонента 406 и может задавать одномерную ROI 380 в этом случае. Дополнительно выходной луч(и) 506 может быть связан с первой модулированной амплитудой колебаний MEM-компонента 406 и может задавать одномерную интересующую подобласть 510 внутри ROI 380. Как пояснено выше, выходные лучи 502 и 506 могут содержать последовательный выходной луч(и), плотность последовательного луча(ей) 506, падающего в интересующей подобласти 510, может быть выше плотности последовательного выходного луча(ей) 502 в ROI 380. В качестве примера интересующая подобласть 510 может иметь распространение между +/- 28 градусами.
[000149] Фиг. 8 и 9 иллюстрируют характерные примеры горизонтального интервала и уменьшенного горизонтального интервала, связанных с выходным лучом(ами) вдоль горизонтальной оси, в соответствии с различными вариантами осуществления настоящей технологии. Как проиллюстрировано на фиг. 8, лидарная система 310 испускает выходной луч(и) 512, расширяющийся по горизонтальному интервалу 514 в ROI 380. Дополнительно, как проиллюстрировано на фиг. 9, при обнаружении одного или более объектов 430 в ROI 380, лидарная система 310 может быть выполнена с возможностью уменьшать расширение выходного луча(ей) 512. Выходной луч(и) 512 с уменьшенным расширением теперь представляется в качестве выходного луча(ей) 516. В связи с этим выходной луч(и) 516 теперь распространяется(-ются) по уменьшенному горизонтальному интервалу 518 вокруг одного или более объектов 430 в интересующей подобласти 520. Интересующая подобласть 520 находится внутри ROI 380.
[000150] Следует отметить, что в конкретных вариантах осуществления выходной луч(и) 512 может быть связан со второй амплитудой колебаний MEM-компонента 406 и может задавать одномерную ROI 380 в этом случае. Дополнительно выходной луч(и) 516 может быть связан с первой модулированной амплитудой колебаний MEM-компонента 406 и может задавать одномерную интересующую подобласть 520 внутри ROI 380. Как пояснено выше, выходные лучи 512 и 516 могут содержать последовательный выходной луч(и), плотность последовательного луча(ей) 516, падающего в интересующей подобласти 520, может быть выше плотности последовательного выходного луча(ей) 512 в ROI 380. В качестве примера, интересующая подобласть 520 может иметь расширение между +/- 28 градусами.
[000151] Фиг. 10 и 11 иллюстрируют характерные примеры двумерных горизонтальных и вертикальных интервалов и уменьшенных двумерных горизонтальных и вертикальных интервалов, связанных с выходным лучом(ами) вдоль вертикальной и горизонтальной оси, в соответствии с различными вариантами осуществления настоящей технологии. Как проиллюстрировано на фиг. 10, лидарная система 310 испускает выходной луч(и) 522, расширяющийся по горизонтальному и вертикальному интервалам 524 в ROI 380. Дополнительно, как проиллюстрировано на фиг. 11, при обнаружении одного или более объектов 430 в ROI 380, лидарная система 310 может быть выполнена с возможностью уменьшать расширение выходного луча(ей) 522. Выходной луч(и) 522 с уменьшенным расширением теперь представляется в качестве выходного луча(ей) 526. В связи с этим выходной луч(и) 526 теперь распространяется(-ются) по уменьшенным горизонтальному и вертикальному интервалам 528 вокруг одного или более объектов 430 в интересующей подобласти 530. Интересующая подобласть 530 находится внутри ROI 380.
[000152] Следует отметить, что в конкретных вариантах осуществления выходной луч(и) 522 может быть связан с первой и второй амплитудами колебаний MEM-компонента 406 и может задавать двумерную ROI 380 в этом случае. Дополнительно выходной(ые) луч(и) 526 может быть связан с первой и второй модулированными амплитудами колебаний MEM-компонента 406 и может задавать двумерную интересующую подобласть 530 внутри ROI 380. Как пояснено выше, выходные лучи 522 и 526 могут содержать последовательный выходной луч(и), плотность последовательного луча(ей) 526, падающего в интересующей подобласти 530, может быть выше плотности последовательного выходного луча(ей) 522 в ROI 380.
Компьютерно-реализованные способы
[000153] Теперь обращаясь к фиг. 12, увидим, что проиллюстрирована блок-схема последовательности операций способа 600 для обнаружения объектов в интересующей области, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
[000154] В некоторых неограничивающих вариантах осуществления настоящей технологии способ 600 может реализовываться посредством компонента 320 контроллера, соединенного с возможностью связи с лидарной системой 310. Как пояснено выше это по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии компонент 320 контроллера может включать в себя один или более процессоров и может реализовываться аналогично электронному устройству 210 и/или компьютерной системе 100, без отступления от объема настоящей технологии. Способ начинается на этапе 602.
[000155] Этап 602. Вызов источника излучения испускать выходной луч к микроэлектромеханическому (MEM) компоненту.
[000156] На этапе 602, компонент 320 контроллера предоставляет в компонент 312 источника света инструкции, управляющий сигнал и/или инициирующий сигнал, указывающие то, когда компонент 312 источника излучения (такой как компонент источника света) должен испускать выходной луч 408 к MEM-компоненту 406. На одном или более этапов, связанных со способом 600, компонент 320 контроллера может быть выполнен с возможностью вызывать испускание выходного луча 408 к MEM-компоненту 406 компонентом 312 источника света при определенных условиях. Такие условия могут включать в себя, но не только: при управлении транспортным средством 220 в беспилотном режиме, когда транспортное средство 220 находится в движении независимо от режима вождения, когда транспортное средство 220 является стационарным, когда транспортное средство 220 первоначально включается, либо на основе операции вручную, выполняемой пользователем (не проиллюстрирован), управляющим транспортным средством 220, и т.д.
[000157] Этап 604. Вызов колебания MEM-компонента с первой амплитудой колебаний для отражения и распространения выходного луча посредством вертикального интервала вдоль вертикальной оси в интересующей области.
[000158] На этапе 604, MEM-компонент 406, колеблющийся относительно вертикальной оси с первой амплитудой колебаний, распространяет выходные лучи 424 и 426 посредством вертикального интервала 504 вдоль вертикальной оси в интересующей области 380 (ROI).
[000159] Этап 606: определение из входного луча, принимаемого из интересующей области, имеется ли объект в интересующей области.
[000160] На этапе 606, компонент 320 контроллера выполнен с возможностью принимать электрические сигналы 470 из множества детекторов 446-1, 446-2, …, 446-N. Компонент 320 контроллера дополнительно выполнен с возможностью анализировать электрические сигналы 470, чтобы обнаруживать один или более объектов 430 в ROI 380.
[000161] На одном или более неограничивающих этапов, связанных со способом 600, компонент 320 контроллера может быть выполнен с возможностью определять значение "времени пролета" для светового луча на основе информации временной синхронизации, связанной с моментом, (i) когда данный световой луч (например, выходной луч 408) испущен посредством компонента 312 источника света, и с моментом, (ii) когда участок светового луча (например, из входных лучей 432 и 434) обнаружен или принят посредством компонента 318 приемного устройства.
[000162] Этап 608: в ответ на определение, что имеется объект в интересующей области, вызов модулирования первой амплитуды колебаний MEM-компонента до первой модулированной амплитуды колебаний для уменьшения вертикального интервала выходного луча вокруг объекта.
[000163] В завершение, на этапе 608, после обнаружения одного или более объектов 430 в ROI 380 на основе входных лучей 432 и 434, компонент 320 контроллера выполнен с возможностью модулировать первую амплитуду колебаний MEM-компонента 406 для модулирования до первой модулированной амплитуды колебаний. Таким образом, компонент 320 контроллера уменьшает вертикальный интервал 504 выходных лучей 424 и 426 вокруг одного или более объектов 430.
[000164] На одном или более неограничивающих этапов способа 600 компонент 320 контроллера может быть выполнен с возможностью предоставлять управляющие сигналы в MEM-компонент 406, чтобы колебаться с первой и/или второй модулированной амплитудой колебаний до тех пор, пока компонент 320 контроллера не примет достаточно точек данных в облаке точек лидарной системы 310, связанном с одним или более объектов 430. Как результат, компонент 320 контроллера может быть выполнен с возможностью подготавливать посредством рендеринга эти точки данных, захваченные последовательно (например, как облако точек), в форме многомерной карты одного или более объектов 430 в ROI 380.
[000165] На других неограничивающих этапах способа 600, после того, как многомерная карта одного или более объектов 430 подготовлена посредством рендеринга, компонент 320 контроллера может быть выполнен с возможностью предоставлять управляющие сигналы в MEM-компонент 406, чтобы колебаться с исходными колебаниями, т.е. с первой и/или второй амплитудой колебаний. Таким образом, лидарная система 310 может снова сканировать вертикальный интервал 504, горизонтальный интервал 514 или горизонтальный и вертикальный интервал 524.
[000166] На одном или более неограничивающих этапов способа 600 компонент 320 контроллера может управлять испусканием следующего выходного луча(ей) после испускания выходного луча 408, и такое испускание может координироваться с обнаружением входных лучей 432 и 434 посредством оптического детектора 416. В связи с этим компонент 320 контроллера может быть выполнен с возможностью вызывать испускание компонентом 312 источника света выходного луча(ей) после испускания выходного луча 408 после того, как обнаружены входные лучи 432 и 434.
[000167] Специалистам в данной области техники должно быть очевидно, что по меньшей мере некоторые варианты осуществления настоящей технологии направлены на расширение диапазона технических решений для разрешения конкретной технической проблемы, а именно, для повышения производительности лидарной системы при уменьшении аппаратной нагрузки, налагаемой на различные лидарные системы, за счет включения MEM-компонентов и модуляции амплитуды колебаний, связанных с MEM-компонентами, для избирательного управления интервалами выходного луча(ей).
[000168] Модификации и улучшения вышеописанных реализаций настоящей технологии могут становиться очевидными для специалистов в данной области техники. Вышеприведенное описание должно быть примерным, а не ограничивающим. В силу этого объем настоящей технологии может ограничиваться исключительно объемом прилагаемой формулы изобретения.
[000169] Хотя вышеописанные реализации описываются и показываются со ссылкой на конкретные этапы, выполняемые в конкретном порядке, следует понимать, что эти этапы могут комбинироваться, подразделяться или переупорядочиваться без отступления от идей настоящей технологии. Соответственно, порядок и группировка этапов не ограничивают настоящую технологию.
Реферат
Настоящая технология относится к лидарным (LiDAR) системам оптического обнаружения и дальнометрии, а более конкретно к лидарным системам для обнаружения объектов в интересующей области. Раскрытые системы и способы относятся к лидарной системе, содержащей источник излучения для испускания выходного луча, микроэлектромеханический (MEM) компонент для приема выходного луча и для отражения выходного луча в сторону интересующей области, причем MEM-компонент колеблется с первой амплитудой колебаний, чтобы распространять выходной луч посредством вертикального интервала вдоль вертикальной оси в интересующей области, детектор для обнаружения входного луча из интересующей области, процессор, выполненный с возможностью определять из входного луча, принимаемого посредством детектора, имеется ли объект в интересующей области, и в ответ на определение, что имеется объект в интересующей области, вызывать модулирование первой амплитуды колебаний MEM-компонента до первой модулированной амплитуды колебаний для уменьшения вертикального интервала выходного луча вокруг объекта. Технический результат - увеличение площади сканирования и увеличение угла распространения луча света, передаваемого в интересующую область, на одной или обеих из горизонтальной или вертикальной оси. 2 н. и 18 з.п. ф-лы, 12 ил.

Комментарии