Устройство и способ регулирования вспомогательного двигателя, выполненного с возможностью подачи тяговой мощности на несущий винт вертолета - RU2695001C2
Код документа: RU2695001C2
Чертежи

Описание
1. Область техники, к которой относится изобретение
Изобретение относится к регулированию вспомогательных двигателей, применяемых в архитектурах вертолетов, и, в частности, к регулированию вспомогательных двигателей, выполненных с возможностью подачи тяговой мощности в дополнение к тяговой мощности, производимой главными двигателями вертолета.
2. Уровень техники
Как правило, вертолеты оснащены главными двигателями, которые служат для обеспечения движения вертолета, и одним или несколькими вспомогательными двигателями. Вспомогательные двигатели являются небольшими газовыми турбинами (обычно называемыми английским сокращением APU от Auxiliary Power Unit), главной функцией которых является производство не тяговой мощности - электрической, механической, гидравлической и/или пневматической - в фазах полета, когда главные двигатели не в состоянии ее производить (на земле, в фазах взлета или посадки, в фазах поиска и т.д.).
В документе US2014/145028-А1 описан вертолет, содержащий главные тяговые двигатели и главную систему регулирования этих двух двигателей.
Этот вертолет содержит также вспомогательный двигатель, связанный с второй системой регулирования, независимой от главной системы регулирования. Эта вторая система регулирования регулирует вспомогательный двигатель по постоянному заданному значению. По этой причине невозможно осуществлять регулирование вспомогательного двигателя на основании погрешности скорости свободной турбины вспомогательного двигателя, что является недостатком, так как может потребовать уравновешивания с главными двигателями вертолета.
В патентной заявке FR 2 992 024 заявитель предложил также использовать вспомогательные двигатели не только для производства не тяговой мощности, но также для обеспечения в некоторых фазах полета дополнительной тяговой мощности в дополнение к тяговой мощности главных двигателей.
В рамках такого использования вспомогательного двигателя одновременно для производства тяговой мощности и не тяговой мощности одной из трудностей является возможность регулирования этого вспомогательного двигателя с низкой и контролируемой статичностью, чтобы иметь возможность адаптировать тяговую мощность, выдаваемую этим двигателем, в зависимости от условий полета вертолета. Ставится также задача регулирования вспомогательного двигателя таким образом, чтобы не влиять на работу главных двигателей.
3. Задачи изобретения
Таким образом, изобретение призвано предложить устройство и способ регулирования вспомогательного двигателя вертолета, выполненного с возможностью производства тяговой мощности в дополнение к главным двигателям.
В частности, изобретение призвано предложить устройство и способ регулирования вспомогательного двигателя, которые не требуют уравновешивания с главными двигателями вертолета.
Изобретение призвано также предложить устройство и способ регулирования вспомогательного двигателя, которые не влияют на работу и характеристики главных двигателей. Иначе говоря, изобретение призвано предложить способ регулирования, который является прозрачным для пилота вертолета.
Изобретение призвано также предложить архитектуру вертолета, содержащую устройство регулирования в соответствии с изобретением.
4. Раскрытие изобретения
В связи с вышеизложенным, объектом изобретения является устройство регулирования вспомогательного двигателя, содержащего газогенератор и свободную турбину, выполненную с возможностью механического соединения с несущим винтом вертолета для подачи на него тяговой мощности в дополнение к тяговой мощности, производимой главными двигателями.
Заявленное устройство регулирования отличается тем, что содержит пропорционально-интегральный регулятор, имеющий пропорциональный коэффициент усиления и интегральный коэффициент усиления, которые являются функциями скорости вращения упомянутого газогенератора упомянутого вспомогательного двигателя вертолета, при этом упомянутый регулятор выполнен с возможностью приема сигнала, характеризующего погрешность скорости упомянутой свободной турбины упомянутого вспомогательного двигателя и называемого сигналом погрешности, и с возможностью генерирования сигнала коррекции скорости приведения во вращение упомянутого газогенератора упомянутого вспомогательного двигателя, при этом упомянутый сигнал коррекции получают путем сложения сигнала, пропорционального упомянутому сигналу погрешности с учетом упомянутого пропорционального коэффициента усиления, и сигнала, называемого интегральным сигналом, получаемого в результате сложения сигнала, пропорционального упомянутому сигналу погрешности с учетом упомянутого интегрального коэффициента усиления, и сигнала, называемого сигналом памяти, выдаваемого контуром отрицательной обратной связи упомянутого интегрального сигнала, при этом упомянутый сигнал памяти зависит от измерения, характеризующего скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Таким образом, заявленное устройство регулирования вспомогательного двигателя позволяет регулировать рабочую скорость вспомогательного двигателя без необходимости обмена данными между этим вспомогательным двигателем и главными двигателями вертолета. В частности, заявленное устройство регулирования позволяет регулировать тяговую мощность, подаваемую вспомогательным двигателем на несущий винт вертолета, без необходимости уравновешивания с главными двигателями. Устройство регулирования является автономным и основано только на скорости вращения свободной турбины и на скорости вращения газогенератора вспомогательного двигателя.
На входе устройство регулирования принимает сигнал погрешности, который получают, например, при помощи схемы вычитания, выполненной с возможностью вычисления разности между заданной скоростью и измерением скорости свободной турбины.
При этом сигнал коррекции определяют путем сложения сигнала, пропорционального упомянутому сигналу погрешности, и сигнала, называемого интегральным сигналом, при этом упомянутый интегральный сигнал получают в результате сложения сигнала, пропорционального упомянутому сигналу погрешности с учетом упомянутого интегрального коэффициента усиления, и сигнала, называемого сигналом памяти, выдаваемого контуром отрицательной обратной связи упомянутого интегрального сигнала, при этом упомянутый сигнал памяти зависит от измерения, характеризующего скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Предпочтительно, согласно изобретению, упомянутый контур отрицательной обратной связи содержит:
- первую цепь, выполненную с возможностью выдавать сигнал памяти, отображающий упомянутый интегральный сигнал,
- вторую цепь, выполненную с возможностью выдавать сигнал памяти, пропорциональный упомянутому интегральному сигналу с учетом коэффициента усиления, называемого коэффициентом аннулирования, меньшего 1,
- селектор, выполненный с возможностью выбирать упомянутую первую цепь или упомянутую вторую цепь в зависимости от результатов теста на измерении, характеризующем скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Согласно этому варианту, интегральный сигнал, который получают путем сложения сигнала, пропорционального упомянутому сигналу погрешности, и сигнала памяти, получают либо путем классического интегрального регулирования (первая цепь контура отрицательной обратной связи), либо путем компенсированного интегрального регулирования (вторая цепь контура отрицательной обратной связи, называемая в дальнейшем цепью компенсации), при котором контур обратной связи корректируют с учетом коэффициента аннулирования памяти. Выбор между двумя типа регулирования осуществляют в соответствии с тестом на измерении, характеризующем скорость вращения свободной турбины упомянутого вспомогательного двигателя.
Иначе говоря, согласно этому предпочтительному варианту, интегральное регулирование обеспечивает коррекцию, которая либо классически отображает интегральную погрешность (первая цепь контура), либо коррекцию, которая стремится к нулю (цепь компенсации). В первом случае устройство регулирования ведет себя как классический пропорционально-интегральный регулятор. Во втором случае сигнал на выходе интегратора постепенно обнуляется, когда погрешность автоматического регулирования скорости вращения свободной турбины является незначительной (поскольку регулируется главными двигателями), и устройство регулирования позволяет регулировать двигатель на выбранной целевой рабочей точке. Иначе говоря, согласно этому варианту, устройство регулирования имеет два рабочих режима, зависящих от результатов теста на измерении, характеризующем скорость вращения свободной турбины вспомогательного двигателя.
Предпочтительно, согласно изобретению, упомянутый тест, осуществляемый при помощи упомянутого селектора, состоит в сравнении упомянутого сигнала погрешности с заранее определенным порогом статичности таким образом, чтобы предусмотреть активацию первой цепи, если погрешность скорости превышает упомянутый заранее определенный порог статичности, и активацию упомянутой второй цепи, если погрешность скорости меньше упомянутого порога, чтобы упомянутый интегральный сигнал постепенно пришел к нулю.
Согласно этому варианту, если погрешность регулирования превышает заранее определенный порог статичности, регулятор ведет себя как классический пропорционально-интегральный регулятор. Если же погрешность регулирования меньше заранее определенного порога статичности, регулятор может заставить вспомогательный двигатель работать на выбранной целевой рабочей точке, например, на уровне упреждения его мощности.
Иначе говоря, для фазы полета без быстрого изменения необходимой мощности устройство регулирования позволяет, постепенно приводя к нулю интегратор, регулировать двигатель на выбранной рабочей точке.
Для фазы полета, требующей быстрого изменения мощности, регулятор опять ведет себя как классический пропорционально-интегральный регулятор.
Согласно другому варианту, упомянутый коэффициент аннулирования упомянутого второго контура является функцией погрешности скорости упомянутой свободной турбины упомянутого вспомогательного двигателя.
Согласно этому варианту, коэффициент аннулирования является функцией погрешности скорости свободной турбины вспомогательного двигателя, что позволяет исключить селектор с условием порога.
Предпочтительно заявленное устройство регулирования дополнительно содержит сумматор, выполненный с возможностью сложения упомянутого сигнала коррекции, генерируемого упомянутым пропорционально-интегральным регулятором, и сигнала, соответствующего целевой рабочей точке упомянутого вспомогательного двигателя, зависящей от упомянутых условий полета вертолета, для подачи командного сигнала в упомянутый газогенератор упомянутого вспомогательного двигателя.
Объектом изобретения является также архитектура многомоторного вертолета, включающая в себя силовую установку, содержащую главные двигатели, выполненные с возможностью соединения с коробкой передачи мощности, вращающей несущий винт вертолета, и вспомогательный двигатель, содержащий газогенератор и свободную турбину, при этом упомянутый вспомогательный двигатель выполнен с возможностью соединения, с одной стороны, с бортовой сетью вертолета для питания упомянутой бортовой сети электрической энергией на земле, и, с другой стороны, с упомянутой силовой установкой для подачи дополнительной тяговой мощности во время полета вертолета.
Заявленная архитектура отличается тем, что дополнительно содержит заявленное устройство регулирования упомянутого вспомогательного двигателя, чтобы во время полета вертолета адаптировать тяговую мощность, подаваемую упомянутым вспомогательным двигателем на упомянутую силовую установку, независимо от какого-либо уравновешивания между упомянутыми главными двигателями и вспомогательным двигателем.
Заявленная архитектура позволяет располагать вспомогательным двигателем, который подает не тяговую, в частности, электрическую мощность в бортовую сеть вертолета, когда вертолет находится на земле, и который производит тяговую мощность во время некоторых фаз полета, причем эту тяговую мощность регулируют без необходимости уравновешивания мощности с главными двигателями вертолета.
Таким образом, заявленная архитектура является исключительно эффективной и позволяет оптимизировать использование вспомогательного двигателя, не влияя при этом на работу других компонентов архитектуры и, в частности, главных двигателей.
Объектом изобретения является также вертолет, имеющий заявленную архитектуру.
Объектом изобретения является также способ регулирования вспомогательного двигателя, выполненного с возможностью выдавать тяговую мощность на несущий винт вертолета, отличающийся тем, что содержит следующие этапы:
- принимают сигнал, характеризующий погрешность скорости упомянутой свободной турбины упомянутого вспомогательного двигателя, называемый сигналом погрешности,
- генерируют сигнал коррекции скорости приведения во вращение упомянутого газогенератора упомянутого вспомогательного двигателя, получаемый в результате сложения сигнала, пропорционального упомянутому сигналу погрешности с учетом пропорционального коэффициента усиления, и сигнала, называемого интегральным сигналом, получаемого в результате сложения сигнала, пропорционального упомянутому сигналу погрешности с учетом интегрального коэффициента усиления, и сигнала, называемого сигналом памяти, зависящего от измерения, характеризующего скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Предпочтительно, согласно изобретению, упомянутый сигнал памяти является сигналом, полученным посредством выбора между сигналом, отображающим упомянутый интегральный сигнал, и сигналом, пропорциональным упомянутому интегральному сигналу с учетом коэффициента усиления, называемого коэффициентом аннулирования, меньшего 1, при этом выбор зависит от результатов теста на измерении, характеризующем скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Иначе говоря, согласно этому варианту, интегральное регулирование является регулированием, получаемым посредством выбора между классическим интегральным регулированием и интегральным регулированием, называемым компенсационным регулированием, получаемым путем зацикливания интегратора с коэффициентом усиления, меньшим 1, при этом выбор зависит от результатов теста на измерении, характеризующем скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Предпочтительно, согласно изобретению, упомянутый тест выбора состоит в сравнении упомянутого сигнала погрешности с заранее определенным порогом статичности и в выборе упомянутого сигнала, отображающего интегральный сигнал, если погрешность скорости по абсолютной величине превышает упомянутый заранее определенный порог статичности, и в выборе упомянутого сигнала, пропорционального упомянутому интегральному сигналу с учетом упомянутого коэффициента аннулирования, если погрешность скорости по абсолютной величине меньше упомянутого порога.
Иначе говоря, выбирают классическое интегральное регулирование, если погрешность скорости превышает упомянутый заранее определенный порог статичности, и компенсационное интегральное регулирование, если погрешность скорости меньше упомянутого порога.
Предпочтительно заявленное устройство регулирования осуществляет заявленный способ регулирования, и предпочтительно заявленный способ регулирования осуществляют при помощи заявленного устройства регулирования.
Объектами изобретения являются также устройство регулирования, архитектура, вертолет и способ регулирования, характеризующиеся в комбинации всеми или частью упомянутых выше или ниже отличительных признаков.
5. Список фигур
Другие задачи, отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера со ссылками на прилагаемые чертежи, на которых:
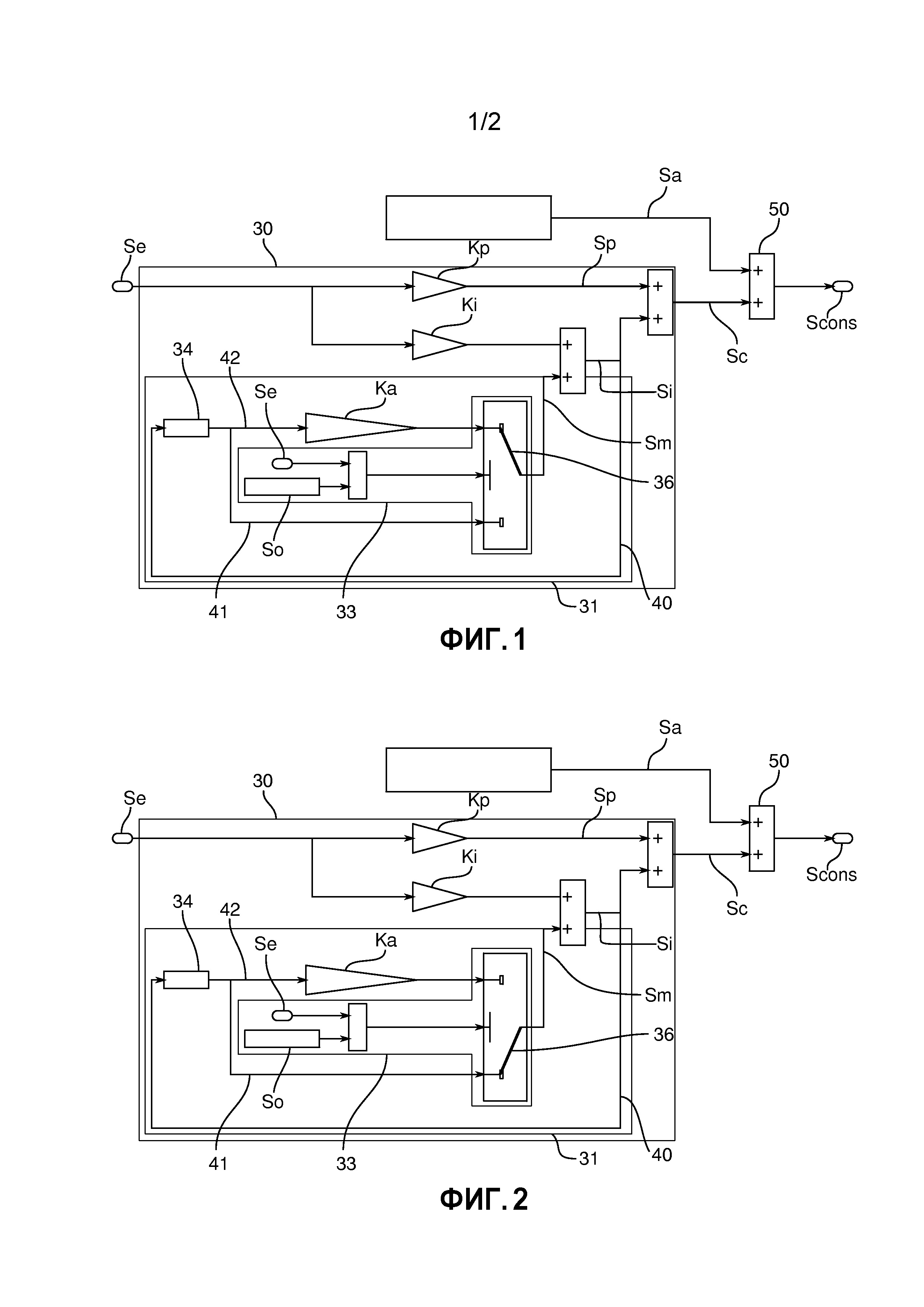
Фиг. 1 - схематичный вид устройства регулирования согласно варианту выполнения изобретения в первом рабочем режиме.
Фиг. 2 - схематичный вид устройства регулирования согласно варианту выполнения изобретения во втором рабочем режиме.
Фиг. 3 - схематичный вид архитектуры вертолета согласно варианту выполнения изобретения.
Фиг. 4 - схематичный вид вертолета согласно варианту выполнения изобретения.
Фиг. 5 - схема способа регулирования согласно варианту выполнения изобретения.
6. Подробное описание варианта выполнения изобретения
В целях иллюстрации и упрощения масштабы и пропорции на фигурах не соблюдены.
На фиг. 3 в упрощенном виде представлена архитектура двухмоторного вертолета согласно варианту выполнения изобретения. Для большей ясности на фиг. 3 показан только один главный двигатель 10, при этом другой двигатель является идентичным и симметрично соединен с коробкой 11 передачи мощности, которая, в свою очередь, соединена с несущим винтом 12 вертолета. Главные двигатели, такие как показанный главный двигатель 10, содержат газогенератор 20, представляющий собой устройство, состоящее из компрессора 21, связанного с камерой 22 сгорания, которая, в свою очередь, связана с турбиной 23. Двигатель содержит также свободную турбину 3, вращающую вал 31 передачи мощности. Газогенератор 20 и свободная турбина 3 расположены между воздухозаборником 14 и выхлопным соплом 15.
Во время работы камера 22 получает питание топливом через форсунки 24, в которые также поступает воздух, сжатый компрессором 21. Сгорание смеси воздух/топливо в камере 22 позволяет получить энергетические газы с высокой скоростью. Эти горячие газы сначала расширяются в турбине 23, которая механически вращает компрессор 21 через приводной вал 25 высокого давления, затем в свободной турбине 3.
Главный двигатель 10 передает механическую мощность на несущий винт 12 вертолета и на оборудование или агрегаты через редукторную коробку 6, которая соединена с коробкой 11 передачи мощности.
Заявленная архитектура включает в себя также вспомогательный двигатель, который, как и главные двигатели, содержит газогенератор 81, включающий в себя компрессор 8а, камеру 86 сгорания и турбину 8с. Вспомогательный двигатель содержит также свободную турбину 8d. Приводной вал 82 свободной турбины 8d вспомогательного двигателя 8 связан с электрическим генератором 83, который преобразует механическую энергию, передаваемую валом 82, в электрическую энергию. Таким образом, вспомогательный двигатель 8 может подавать не тяговую электрическую энергию в бортовую сеть 9 вертолета.
Вспомогательный двигатель соединен также с коробкой 11 передачи мощности через механизм 84 сцепления, управляемый таким образом, чтобы передавать по команде тяговую мощность на несущий винт вертолета в некоторых фазах полета вертолета.
Архитектура включает в себя также устройство 7 регулирования скорости вспомогательного двигателя 8. Это устройство 7 регулирования получает информацию, характеризующую скорость 7а несущего винта вертолета, информацию, характеризующую скорость 7b вращения свободной турбины 8d вспомогательного двигателя 8, и выдает на выходе заданное значение 7с скорости. Это заданное значение скорости преобразуют, например, в заданное значение расхода топлива, впрыскиваемого в камеру 86 сгорания.
Далее следует более подробное описание устройства 7 регулирования, в частности, со ссылками на фиг. 1 и 2.
Устройство 7 регулирования содержит пропорционально-интегральный регулятор 30, имеющий пропорциональный коэффициент усиления Кр и интегральный коэффициент усиления Ki, которые являются функциями скорости вращения газогенератора 8а вспомогательного двигателя 8.
Регулятор 30 выполнен с возможностью принимать сигнал Se, характеризующий погрешность скорости 7b свободной турбины 8d вспомогательного двигателя 8. В дальнейшем этот сигнал Se будет называться сигналом погрешности.
Регулятор 30 выполнен также с возможностью генерировать сигнал коррекции Sc скорости приведения во вращение газогенератора 81 вспомогательного двигателя 8.
Для этого регулятор 30 содержит пропорциональный модуль, имеющий пропорциональный коэффициент Кр усиления, чтобы выдавать сигнал Sp, пропорциональный сигналу погрешности. Регулятор 30 содержит также интегральный модуль, имеющий коэффициент Ki усиления и контур 31 отрицательной обратной связи, чтобы выдавать интегральный сигнал Si. Коэффициенты Кр и Ki являются функциями скорости вращения газогенератора 81 вспомогательного двигателя 8.
Контур 31 отрицательной обратной связи интегрального модуля имеет две цепи 41, 42 и селектор 33, выполненный с возможностью определять, какую из двух цепей необходимо активировать в зависимости от условий. Первая и вторая цепи 41, 42 используют вместе часть 40 контура 31 отрицательной обратной связи, которая передает отображение сигнала Si в каждую из двух цепей.
Первая цепь 41 выполнена с возможностью выдавать сигнал памяти Sm, который является отображением интегрального сигнала Si.
Вторая цепь 42 выполнена с возможностью выдавать сигнал памяти Sm, пропорциональный упомянутому интегральному сигналу Si с учетом коэффициента Ка аннулирования, меньшего 1, таким образом, чтобы интегральный сигнал Si, получаемый на выходе интегрального модуля, постепенно обнулялся, когда погрешность автоматического регулирования является низкой. Эта вторая цепь 42 образует, таким образом, цепь компенсации.
Селектор 33 выполнен с возможностью выбирать первую цепь или вторую цепь в зависимости от результатов теста на измерении, характеризующем скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя.
Таким образом, интегральный сигнал Si получают либо посредством классического интегрального регулирования, либо посредством компенсационного регулирования, при котором контур обратной связи корректируют при помощи коэффициента аннулирования Ка, причем этот выбор осуществляют по критерию, основанному на измерении, характеризующем скорость вращения свободной турбины вспомогательного двигателя.
Контур 31 отрицательной обратной связи содержит также схему 34 выдержки времени для смещения во времени интегрального сигнала Si, который передают в каждую из двух цепей 41, 42.
Селектор 33 содержит два входа: вход, соединенный с цепью 42 компенсации, и вход, соединенный с первой цепью 41. Селектор содержит выход для передачи выбранного сигнала памяти Sm.
Кроме того, селектор 33 содержит компаратор, выполненный с возможностью сравнивать сигнал погрешности Se с заранее определенным порогом So статичности.
Селектор выполнен с возможностью соединять вход селектора, соединенный с первой цепью, с выходом, если компаратор показывает, что погрешность скорости по абсолютной величине превышает заранее определенный порог статичности. Иначе говоря, селектор выдает интегральный сигнал Si в качестве сигнала памяти Sm, если погрешность скорости по абсолютной величине превышает заранее определенный порог статичности.
Селектор выполнен также с возможностью соединять вход, соединенный с цепью компенсации, с выходом, если компаратор показывает, что погрешность скорости по абсолютной величине меньше заранее определенного порога статичности. Иначе говоря, селектор передает сигнал, выдаваемый цепью компенсации, как сигнал памяти Sm, если погрешность скорости по абсолютной величине меньше упомянутого порога So. В этом случае интегральный сигнал Si на выходе интегратора постепенно обнуляется.
На фиг. 1 схематично представлено устройство регулирования, когда селектор переключен в положение, соответствующее компенсации, применяемой цепью компенсации. Иначе говоря, выход селектора выдает сигнал памяти, предназначенный для обнуления интегрального сигнала Si. На фиг. 2 схематично показано устройство регулирования, в котором селектор переключен в положение отсутствия компенсации. Иначе говоря, выход селектора выдает интегральный сигнал. Оба положения - компенсации и отсутствия компенсации - схематично представлены в виде положения выключателя 36.
Устройство регулирования содержит также сумматор 50, выполненный с возможностью сложения сигнала Sc коррекции, генерируемого пропорционально-интегральным регулятором 30, и сигнала Sa, соответствующего целевой рабочей точке вспомогательного двигателя, зависящей от условий полета вертолета, чтобы выдавать командный сигнал Scons на газогенератор вспомогательного двигателя.
Согласно другому варианту выполнения, не показанному на фигурах, коэффициент аннулирования цепи компенсации является функцией погрешности скорости вращения свободной турбины вспомогательного двигателя, что позволяет заменить селектор 33 и условие порога So.
На фиг. 4 схематично представлен вертолет, содержащий два главных двигателя 10, 16 и вспомогательный двигатель 8, соединенные с коробкой 11 передачи мощности. Вспомогательный двигатель 8 регулируют при помощи заявленного устройства регулирования.
На фиг. 5 представлена схема способа регулирования согласно варианту осуществления изобретения.
Он содержит этап 61 получения сигнала, характеризующего погрешность скорости упомянутой свободной турбины упомянутого вспомогательного двигателя и называемого сигналом погрешности, и этап 62 генерирования сигнала коррекции скорости приведения во вращение вспомогательного двигателя, получаемого в результате сложения сигнала, пропорционального упомянутому сигналу погрешности, и сигнала, называемого интегральным сигналом, получаемого в результате сложения сигнала, пропорционального упомянутому сигналу погрешности с учетом интегрального коэффициента усиления Ki, и сигнала Sm памяти, зависящего от измерения, характеризующего скорость вращения упомянутой свободной турбины упомянутого вспомогательного двигателя 8.
Предпочтительно заявленный способ осуществляют при помощи заявленного устройства регулирования, и заявленное устройство регулирования предпочтительно осуществляет заявленный способ.
Реферат
Группа изобретений относится к устройству и способу регулирования вспомогательного двигателя, конструкции многомоторного самолета, вертолету, содержащему такую конструкцию. Устройство регулирования вспомогательного двигателя содержит газогенератор, свободную турбину, пропорционально-интегральный регулятор, выполненный с возможностью приема сигнала, характеризующего погрешность скорости свободной турбины вспомогательного двигателя. Для реализации способа принимают сигнал, характеризующий погрешность скорости свободной турбины вспомогательного двигателя, генерируют сигнал коррекции скорости приведения во вращение газогенератора вспомогательного двигателя определенным образом. Конструкция многомоторного вертолета содержит силовую установку и вспомогательный двигатель, устройство регулирования вспомогательного двигателя. Обеспечивается регулирование вспомогательного двигателя в зависимости от главных двигателей. 4 н. и 6 з.п. ф-лы, 5 ил.
Комментарии