Оптический зонд с коррекцией посредством обратной связи - RU2544457C2
Код документа: RU2544457C2
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к оптическому зонду, подходящему для миниатюрных применений. Изобретение дополнительно относится к системе оптической визуализации и способу работы зонда.
УРОВЕНЬ ТЕХНИКИ
В связи с диагностикой различных заболеваний, таких как различные злокачественные заболевания, берут биопсию. Когда берут биопсию и не обнаруживают злокачественных клеток, важно иметь возможность исключить то, что биопсию просто брали из неправильного места. Для повышения достоверности результатов исследования образцов, взятых на биопсию, можно использовать направляемую биопсию. Такое исследование образцов с помощью направляемой биопсии может быть основано на множестве методик визуализации, примеры включают в себя рентгеновские лучи, компьютерную томографию (КТ), магнитно-резонансную томографию (МРТ), ультразвук и оптику.
Для многих целей используют оптическую визуализацию с помощью миниатюризованного игольчатого микроскопа. Визуализация с помощью игольчатой микроскопии обладает преимуществом, которое состоит в том, что в ней не используют опасные рентгеновские лучи или дорогостоящее оборудование КТ или МРТ сканеров. Кроме того, она поддерживает интеграцию в саму иглу для биопсии, тем самым позволяя прямое визуальное исследование места биопсии перед, во время и после биопсии.
В европейской патентной заявке № 1901107 A1 описан пример миниатюризованного конфокального игольчатого микроскопа, который содержит вибрирующий источник света, выполненный в форме волокна, установленного внутри корпуса, причем сканирование выполняется посредством вибрации этого источника, при этом вибрация основана на системе привода, которая содержит электромагнитные катушки и постоянные магниты.
Проблема, связанная со сканирующим волокном, состоит в том, что если истинное положение конца волокна отклоняется от заданного положения, то при конструировании изображения возникают артефакты.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Авторы настоящего изобретения предположили, что один способ для избегания артефактов, связанных с позиционными отклонениями, заключается в усовершенствовании движения волокна или оптического волновода, чтобы гарантировать, что оптический волновод следует по требуемому пути. В системе оптического зонда, где управление движением оптического волновода основано на системе привода на основе катушек, где ток пропускают через катушку, всегда будут иметь место отклонения от линейной зависимости между поданным током и фактическим положением перемещаемого оптического волновода. Следовательно, знать только параметры тока не достаточно для того, чтобы сконструировать изображение без деформаций, и существует необходимость в предоставлении сигнала обратной связи, который служит мерой информации о положении вибрирующего волокна или другого соответствующего оптического элемента в дополнение к подаваемому току приводных катушек. В связи с этим цель настоящего изобретения состоит в том, чтобы предоставить оптический зонд, который имеет минимальные размеры, имеет по существу любую форму или даже не вызывает появления артефактов при конструировании изображения в результате движения зонда. Дополнительная цель состоит в том, чтобы предоставить зонд, который подходит для миниатюризации.
Предпочтительно, изобретение уменьшает, ослабляет или устраняет один или более указанных выше или других недостатков, отдельно или в любом сочетании.
В первом аспекте настоящее изобретение направлено на указанные выше потребности путем предоставления оптического зонда, причем зонд содержит:
оптический волновод, который имеет дистальный конец;
корпус, причем оптический волновод установлен внутри корпуса с тем, чтобы дистальный конец можно было смещать относительно корпуса; и
систему привода на основе катушек, которая содержит приводные катушки, которые способны смещать дистальный конец посредством силы смещения, индуцированной путем пропускания тока возбуждения через приводные катушки; при этом ток возбуждения содержит заданный ток, связанный с заданным положением и корректировочным членом;
при этом корректировочный член определяют посредством контура обратной связи, включая:
- подачу тока возбуждения на приводные катушки;
- временное выключение тока возбуждения и измерение скорости дистального конца, когда выключают ток возбуждения; и
- сравнение заданного положения и измеряемой скорости посредством:
- получения заданной скорости из заданного положения и сравнения заданной скорости и измеряемой скорости для получения разности; или
- получения измеряемого положения из измеряемой скорости и сравнения заданного положения и измеряемого положения для получения разности, и
- коррекции тока возбуждения, если разность превышает предварительно задаваемый уровень.
Зонд содержит оптический волновод, который имеет дистальный конец, установленный внутри корпуса, и при этом дистальный конец можно смещать относительно корпуса. В вариантах осуществления зонд представлен в форме игольчатого зонда, такого как миниатюризованный конфокальный микроскоп. Смещение, типично в форме вибрации, осуществляют посредством системы привода на основе катушек, которая содержит приводные катушки, которые индуцируют силу смещения посредством пропускания тока возбуждения через приводные катушки. В варианте осуществления оптический волновод представляет собой оптическое волокно со свободным дистальным концом. В данном случае «свободный» обозначает, что его можно свободно смещать относительно корпуса. Оптический волновод может содержать один или более оптических элементов.
В изобретении в зонде используют контур обратной связи, который попеременно управляет смещением оптического волновода посредством пропускания тока через приводные катушки и выключения тока через приводные катушки и, когда ток возбуждения выключен, измеряет скорость дистального конца оптического волновода. Измеряемую скорость сравнивают с заданным положением и, если обнаруживают разность, то ток возбуждения корректируют так, чтобы устранить или, по меньшей мере, уменьшить эту разность.
Сравнение заданного положения и измеряемой скорости для получения разности можно реализовать посредством любого подходящего средства для сравнения величин в электрической цепи. Профессионалы могут задать надлежащий предварительно задаваемый уровень. В одном варианте осуществления этот уровень может составлять ноль с тем, чтобы минимизировать какую-либо разность, в другом варианте осуществления его можно задать приблизительно равным определяемому или устанавливаемому пределу шума.
Варианты осуществления настоящего изобретения полезны по многим причинам. За счет переключения между приведением катушек в движение и выключением приводных катушек при измерении скорости дистального конца представляется возможным использовать обе катушки в системе (по системе с одной катушкой на каждое одно направление) для приведения в движение и для измерения и, следовательно, можно избежать разделения пары катушек на приводящую катушку и измерительную катушку. Это делает систему приведения в движение и измерения значительно более линейной, чем система, которая основана на разделении катушек. Дополнительно это увеличивает чувствительность системы привода почти в 4 раза. Получаемое более низкое искажение вместе с более высокой чувствительностью делает, при том же рассеивании на приводную катушку, возможным увеличение движущей силы. Поскольку нет необходимости в разделении измерительных катушек, система хорошо подходит для миниатюризации, так как система привода может занимать меньше места. Кроме того, снижена стоимость производства.
Разность можно определить или получив заданную скорость из заданного положения и сравнив заданную скорость и измеряемую скорость, чтобы получить разность, или получив измеряемое положение из измеряемой скорости и сравнив заданное положение и измеряемое положение, чтобы получить разность. Может быть предпочтительным использовать сравнение скоростей для контура обратной связи, поскольку в этой ситуации нет необходимости интегрировать измеряемую скорость для того, чтобы определить положение. Таким образом, контур обратной связи может быть быстрее, и его можно реализовать более простым способом, чем контур обратной связи, основанный на сравнении положения.
В благоприятном варианте осуществления скорость дистального конца измеряют посредством измерения напряжения на приводных катушках, когда выключают ток возбуждения. Напряжение является мерой электродвижущей силы, эдс, приводных катушек. Известно, что электродвижущая сила является мерой скорости объекта, двигающегося в магнитном поле.
Оптический волновод можно смещать при множестве частот, однако может быть благоприятным смещать оптический волновод на резонансной частоте системы зонда или частоте, близкой к ней. Приведение оптического волновода в движение на резонансной частоте системы зонда или близко к ней может требовать только умеренных токов возбуждения, что позволяет использовать миниатюризованные катушки.
Благоприятно, общий коэффициент контура обратной связи превышает 1, например значительно превышает 1. В вариантах осуществления коэффициент обратной связи может иметь максимально возможное значение без риска для выполнения своей функции коэффициентом обратной связи, например коэффициент обратной связи не должен быть таким высоким, поскольку существует необходимость защитить катушку. Специалист в данной области техники может задать надлежащий предел коэффициента обратной связи. Используя высокий коэффициент обратной связи, дополнительно гарантируют, что отличие параметра, связанного с положением, будет сохраняться низким, с тем чтобы заданное положение можно было использовать для определения положения дистального конца с высокой степенью достоверности.
В благоприятном варианте осуществления корректировочный член может дополнительно содержать опережающий член, который основывается на одном или более механических и/или электрических параметрах. Использование опережающего члена в сочетании с членом обратной связи может быть уместно в ситуации низкого коэффициента обратной связи, например в ситуации, когда систему зонда приводят в движение не на резонансной частоте. Механические и электрические параметры могут представлять собой такие параметры, как коэффициент жесткости, вес перемещаемой массы, коэффициент затухания системы и т.д.
В применениях оптический зонд может формировать часть эндоскопа, катетера, иглы для биопсии или других схожих применений, например, связанных с медицинским осмотром in vivo, например связанных с диагностикой злокачественных опухолей, мониторингом заживления ран или исследованием молекулярных процессов в ткани. Также предполагают, что области применения могут включать в себя, в качестве неограничивающих примеров, области, в которых можно использовать миниатюрные устройства для визуализации, например, в связанных с осмотром мелкомасштабных устройствах, и т.д.
Во втором аспекте, в дополнение к оптическому зонду согласно первому аспекту, предоставлена система оптической визуализации, причем оптическая система содержит:
- источник излучения, который оптически связан с оптическим зондом, причем зонд размещен для направления излучения, испускаемого источником излучения, в область, представляющую интерес; и
- датчик излучения, который оптически связан с оптическим зондом, причем датчик размещен для обнаружения излучения, получаемого из области, представляющей интерес.
В третьем аспекте настоящего изобретения предоставлен способ работы зонда в соответствии с первым аспектом изобретения;
причем способ состоит в том, что:
- подают ток возбуждения на приводные катушки;
- временно выключают ток возбуждения и измеряют скорость дистального конца; и
- сравнивают заданное положение и измеряемую скорость посредством:
- получения заданной скорости из заданного положения и сравнения заданной скорости и измеряемой скорости для получения разности; или
- получения измеряемого положения из измеряемой скорости и сравнения заданного положения и измеряемого положения для получения разности;
и корректируют ток возбуждения, если разность превышает предварительно задаваемый уровень.
В целом, различные аспекты изобретения можно комбинировать и объединять любым возможным образом в рамках объема изобретения. Эти и другие аспекты, признаки и/или преимущества изобретения будут очевидны из описанных далее в настоящем документе вариантов осуществления и объяснены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения далее описаны только в качестве примера со ссылкой на чертежи, на которых:
на фиг.1 представлено схематическое изображение в поперечном разрезе первого варианта осуществления оптического зонда;
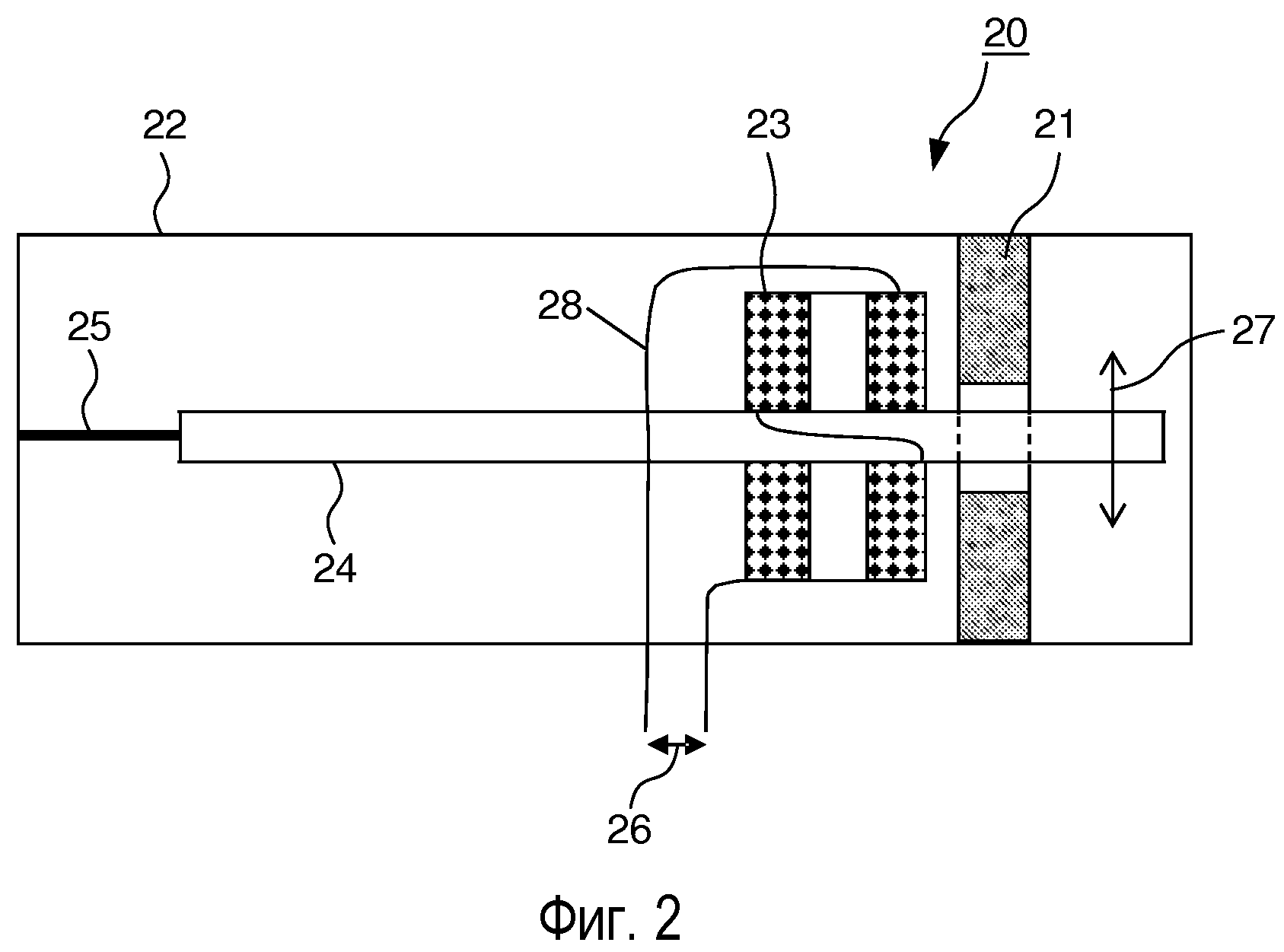
на фиг.2 представлено схематическое изображение в поперечном разрезе второго варианта осуществления оптического зонда;
на фиг.3 схематически проиллюстрирована цепь привода с контуром обратной связи;
на фиг.4,A и 4,B проиллюстрирована работа переключателя привода и переключателя обратной связи;
на фиг.4,C и 4,D показано напряжение на катушках и вывод выборки и запоминания нулевого порядка;
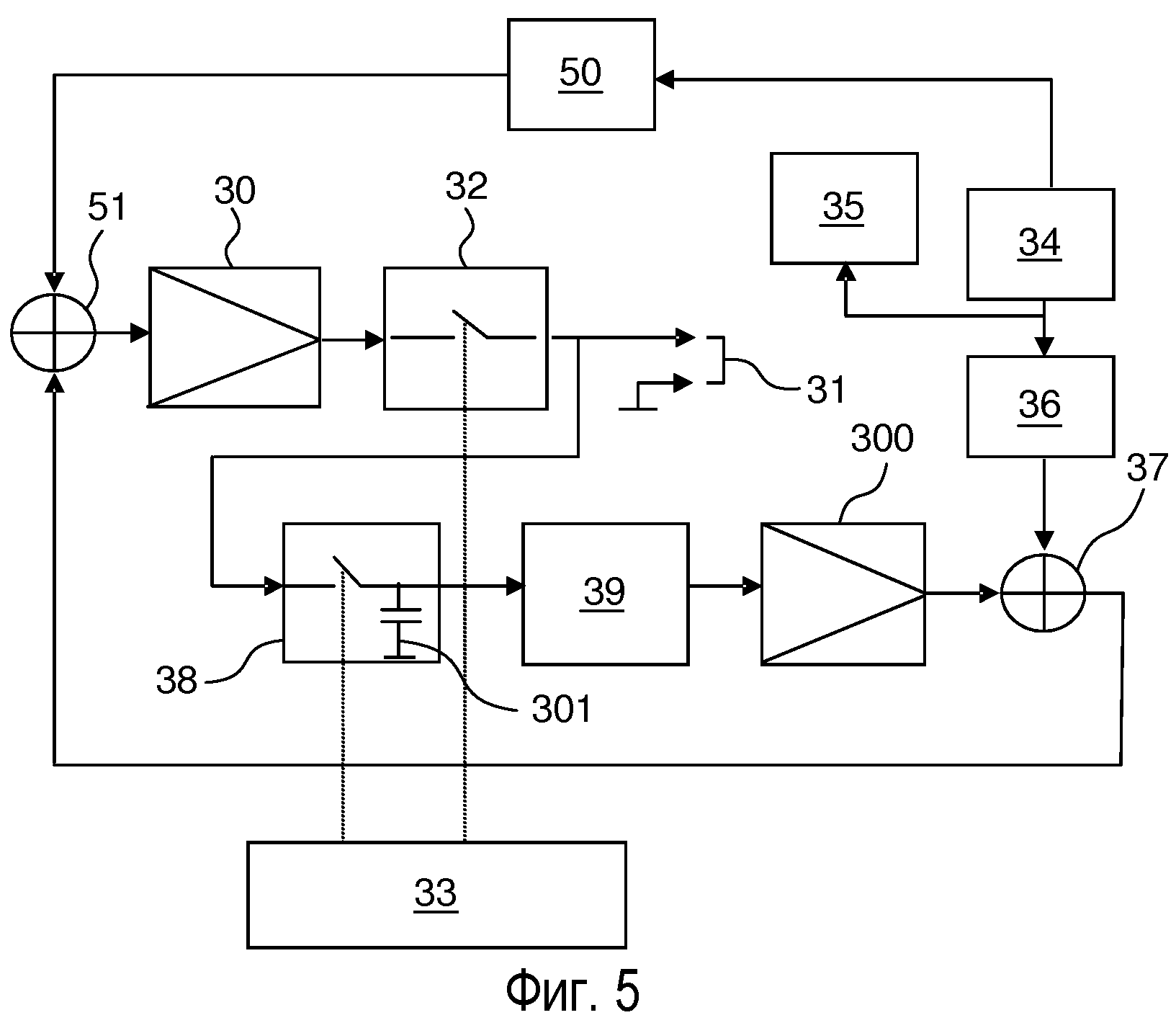
на фиг.5 проиллюстрирована схематическая цепь привода с контуром обратной связи в сочетании с опережающим контуром;
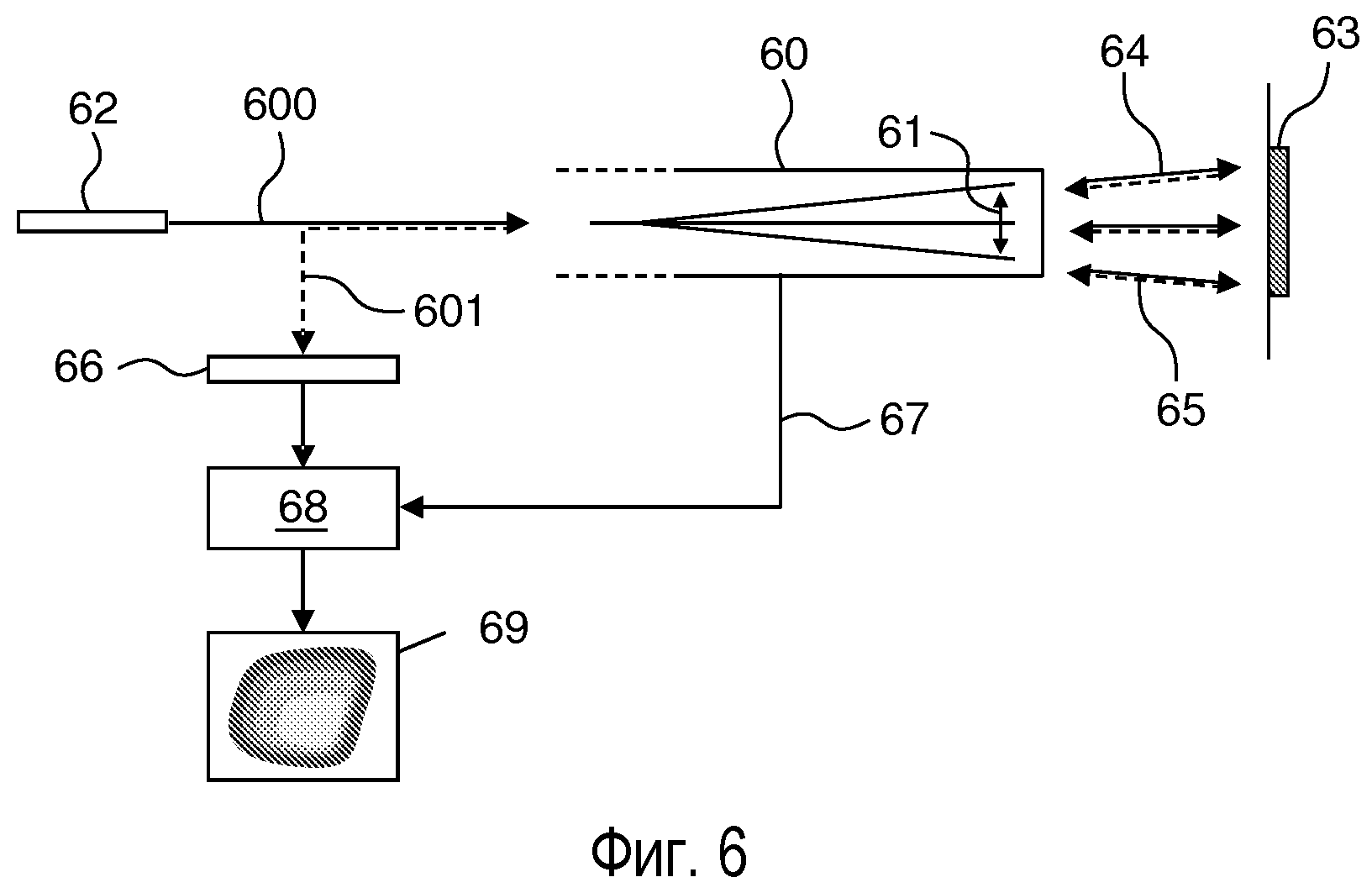
на фиг.6 схематически проиллюстрирована работа варианта осуществления оптического зонда применительно к системе оптической визуализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 представлен схематический поперечный разрез оптического зонда 1 в соответствии с вариантами осуществления настоящего изобретения. Оптический зонд может быть представлен в форме конфокального микроскопа. Оптический зонд содержит оптический волновод 2, который имеет дистальный конец 3 и корпус 4. Дистальный конец оптического волновода можно свободно двигать 5 относительно корпуса в том смысле, что в корпусе есть определенное пространство, в котором можно двигать конец оптического волновода. Корпус имеет на своем дистальном конце окно 6, например, стеклянное или полимерное окно. В проиллюстрированном варианте осуществления оптический волновод содержит систему 7 линз, возможно прикрепленную к волноводу посредством крепления 8. Однако изобретение не ограничено присутствием каких-либо конкретных оптических компонентов. Компоненты показаны только для иллюстративных целей. В целом, можно использовать любую подходящую систему линз, которая известна специалистам в данной области техники. Сам оптический волновод установлен внутри корпуса посредством подходящих средств (не показаны) с тем, чтобы оптический волновод имел фиксированную часть и подвижную часть.
В вариантах осуществления оптический волновод может представлять собой оптические волокна (многомодовые и одномодовые), тонкопленочные световоды, волокна фотонных кристаллов, волокна с фотонной запрещенной зоной (ФЗЗ), волокна, сохраняющие поляризацию, и т.д. Оптический зонд также может содержать более чем одно волокно, т.е. множество волокон или жгут волокон.
Оптический волновод можно смещать посредством системы 9, 10 привода на основе катушек. Система привода может смещать дистальный конец посредством пропускания тока через приводные катушки 9. В проиллюстрированном варианте осуществления система привода содержит первую часть, которая содержит магнит 10 с осевой поляризацией, и вторую часть, которая содержит электромагнитные катушки 9, причем катушки установлены на корпусе, а магнит установлен на оптическом волноводе. На фиг.2 проиллюстрирована противоположная ситуация, когда катушки установлены на оптическом волноводе, а магнит установлен на корпусе. Когда ток подают на катушки 9, благодаря силе Лоренца, магнит 10 будет вытолкнут из центрального положения в зависимости от направления тока. Таким образом, дистальный конец оптического волновода можно поместить в любое положение внутри рабочей области корпуса. В вариантах осуществления магнит 10 намагничен вдоль оси оптического зонда. Проиллюстрирован только один набор катушек, которые делают возможным смещение в одном направлении, например, вдоль направления, указанного номером позиции 5. Обмотка(и) катушек расположена(ы) в плоскости, параллельной оси оптического волновода. Перпендикулярно ориентированный набор катушек (не показан) используют для смещения в направлении, перпендикулярном проиллюстрированному направлению 5, кроме того, также можно использовать набор катушек, ориентированных для смещения вдоль этого направления, такие катушки также не показаны.
На фиг.2 проиллюстрировано схематическое изображение в поперечном разрезе оптического зонда 20. На фиг.2 магнит 21 прикреплен к корпусу 22, тогда как катушки 23 прикреплены к внешней части оптического волновода 24. В проиллюстрированном варианте осуществления оптический волновод содержит сердечник 25 и гибкую опорную трубку 24 для защиты сердечника. Кроме того, на фиг.2 проиллюстрировано последовательное соединение 28 двух катушек и связанное с ним падение напряжения 26 на этих двух катушках. Ток через катушки 23 вместе с магнитным полем из магнита 21, намагниченного в осевом направлении, создает силу в направлении, обозначенном номером позиции 27. Эта система генерации силы также будет генерировать обратную электродвижущую силу, эдс, когда катушки перемещают в направлении 27 относительно магнита. Падение напряжения на проводах 26 отражает эту эдс.
На фиг.3 проиллюстрирована схематическая цепь привода с контуром обратной связи в соответствии с вариантами осуществления настоящего изобретения. На фиг.3 проиллюстрирована ситуация, когда заданную скорость определяют посредством получения заданного положения. Усилитель 30 мощности подает ток возбуждения для управления катушками. Катушки электрически соединены с контактами 31. Контакты 31 отделены от усилителя 30 мощности переключателем 32 (переключатель привода), который находится под управлением средства 33 управления переключателем. Когда переключатель 32 замкнут, ток возбуждения подают на катушки через контакты 31. Усилитель 30 мощности находится под управлением генератора 34 заданного положения. Генератор заданного положения выводит требуемое положение линзы на блок 35 конструирования изображения. В варианте осуществления требуемую скорость привода определяют как производную положения. Производную положения определяют в блоке 36 вычисления производной и подают в устройство 37 сравнения. Вывод устройства 37 сравнения подают в усилитель 30 мощности для управления катушками.
Если переключатель 32 привода открыт, т.е. ток возбуждения выключен, а переключатель 38 закрыт, цепь измеряет обратную электродвижущую силу приводных катушек через контакты 31. Переключатель 38 (переключатель обратной связи) находится под управлением средства 33 управления переключателем. Измеренную обратную электродвижущую силу можно обрабатывать, например, посредством фильтра 39 низких частот, и усилить 300 перед сравнением на устройстве 37 сравнения.
В варианте осуществления, основанном на получении измеряемого положения по измеряемой скорости и сравнении заданного положения и измеряемого положения, блок 36 вычисления производной опущен. Вместо этого блок интегрирования или другое средство для получения положения по измеряемой скорости реализован или в виде отдельного блока, вставленного между фильтром 39 низких частот и усилителем 300, или реализован в виде части фильтра 39 низких частот или усилителя 300.
На фиг. 4,A и 4,B проиллюстрирована работа переключателей 32, 38. Значение «единица» соответствует закрытию переключателей, т.е. ток может проходить через переключатель, тогда как значение «ноль» соответствует открытию переключателей, т.е. ток не может проходить. Горизонтальная ось представляет собой ось времени. На фиг.4,A представлена работа переключателя 32 привода, которая показывает, что на катушки альтернативно подают ток возбуждения и альтернативно выключают его. На фиг.4,B представлена работа переключателя 38 обратной связи, который, короче говоря, закрыт, пока ток возбуждения выключен, что позволяет цепи обратной связи измерять напряжение на контактах 31. Цепь на фиг.3 гарантирует, что если скорость дистального конца оптического волновода отклоняется от заданной скорости, то ток возбуждения корректируют до тех пор, пока измеряемая скорость не станет равна заданной скорости.
Специалисты в данной области могут соответствующим образом задать синхронизацию открытия переключателя 38 обратной связи после закрывания переключателя 32 привода, а также длительности состояний «открыто-закрыто». Однако в благоприятном варианте осуществления переключатель 38 обратной связи работает с задержкой 40, что позволяет разрядить шум на катушках, чтобы опуститься ниже приемлемого уровня. Шум обусловлен энергией в емкостях в переключателе, разводке, катушках и собственной индуктивностью в катушках. Емкость 301 конденсатора является частью цепи выборки и запоминания нулевого порядка. Когда переключатель 38 обратной связи включен, эдс, пропорциональная скорости оптического зонда относительно корпуса, заряжает емкость конденсатора, и, когда переключатель 38 обратной связи выключен, эдс остается на емкости конденсатора с тем, чтобы напряжение можно было измерить, фильтровать, усилить и дополнительно использовать для управления с обратной связью. Сброс напряжения на катушках в момент, когда оба переключателя выключены, происходит через сопротивление переключателей.
На фиг. 4,C и 4,D показано напряжение на катушках и вывод выборки и запоминания нулевого порядка. На фиг.4,C проиллюстрировано напряжение на катушках во время переключения, как проиллюстрировано на фиг.4,A и 4,B. На фиг.4,C в течение этого периода сначала открывают переключатель 32 привода (см. фиг.4,A), и измеряемая эдс связана только с движением дистального конца оптического волновода. Когда переключатель привода закрывают, измеряемая эдс отражает управляющее напряжение, которое подает устройство управления, и когда переключатель привода открывают снова, напряжение достигает уровня, где измеряемая эдс снова связана только со скоростью дистального конца оптического волновода. На фиг.4,D показан вывод выборки и запоминания нулевого порядка, где каждый раз, когда открывают переключатель обратной связи (см. фиг.4,B), напряжение подскакивает вследствие зарядки конденсатора 301 до уровня, присутствующего на приводных катушках в момент закрытия переключателя обратной связи (см. фиг.4,C). Зависимость скорости оптического зонда относительно корпуса от времени имеет наклонную форму, как можно видеть на фиг.4,D. Горизонтальная ось представляет собой ось времени.
Чтобы добиться малой ошибки между заданной скоростью и фактической скоростью дистального конца, может потребоваться коэффициент обратной связи, который значительно превышает 1, на частотах, при которых предположительно будут перемещать оптический волновод. Это можно реализовать, выбрав высокий общий коэффициент усиления, что ведет к широкой полосе пропускания, или выбрав относительно низкий коэффициент усиления и только одну частоту для перемещения оптического волновода: резонансную частоту. Этот последний выбор, в частности, полезен при слабой амортизации движущихся механических частей и приведет к узкой полосе пропускания и слабой диссипации в катушках и также к малой ошибке скорости. Ошибка скорости может быть достаточно низкой для надежного использования заданного положения в качестве информации о положении при резонансной частоте. Однако положение дистального конца при нерезонансных частотах относительно не двигающихся частей можно определить посредством ускоряющей силы на не двигающейся части при этих частотах и резонансной частоте дистального конца.
На фиг.5 проиллюстрирована цепь привода с контуром обратной связи в сочетании с опережающим контуром. Основная часть проиллюстрированной цепи схожа с показанной на фиг.3. Однако заданное положение 34 дополнительно выводят на блок 50 для определения опережающего члена на основе одного или более механических и/или электрических параметров. Опережающий член комбинируют с членом обратной связи в устройстве 51 объединения, чтобы ввести в усилитель 30 мощности.
Опережающий член можно благоприятно использовать применительно к управлению системой в нерезонансном режиме для того, чтобы компенсировать низкий коэффициент обратной связи и высокую ошибку обратной связи. Для опережающего способа сначала может потребоваться определить постоянную жесткости, перемещаемую массу и амортизацию оптического волновода и его геометрию. Эти параметры могут определять уникальным образом положение и скорость в зависимости от прилагаемой силы. Эта сила является функцией подаваемого тока. Опережающий член можно реализовать, например, в виде справочной таблицы, которая содержит известные соотношения между механическими или электрическими параметрами и перемещением оптического зонда. Такие соотношения могут быть известны из идеализированных тестов.
На фиг.6 схематически проиллюстрирована работа варианта осуществления оптического зонда применительно к системе оптической визуализации.
На фиг.6 схематически проиллюстрирован оптический зонд 60, например, как проиллюстрировано применительно к фиг.1 и 2. Смещение зонда отражено 61 схематически. Оптический зонд оптически связан с источником 62 излучения с тем, чтобы зонд направлял излучение 600, 64 из источника излучения в область 63, представляющую интерес. Источник излучения может представлять собой любой подходящий источник, такой как, но без ограничения, лазеры, СД, газоразрядные лампы или люминесцентные источники любых типов.
Излучение 64, испускаемое зондом, взаимодействует с исследуемым объектом в области 63, представляющей интерес. После взаимодействия зонд может получать часть излучения 65, например отраженное излучение, излучение обратного рассеивания, повторное испускаемое излучение или излучение любого другого типа. Обнаруживаемое излучение 65, 601 можно направить на датчик 66 через соединение с зондом.
Обнаруживаемое излучение 65 вместе с данными 67 положения, известными из генератора 34 положения (фиг.3), можно вводить в блок 68 конструирования изображения для генерации изображения 69 области, представляющей интерес.
Вследствие коррекции тока возбуждения с использованием обратной связи и необязательно с использованием опережающей связи генерируемое изображение не содержит или минимально содержит искажение положения. Коррекция положения, которую предлагают варианты осуществления настоящего изобретения, заставляет оптический зонд следовать по предварительно заданному или требуемому пути, и фактическое положение близко совпадает с предварительно заданным положением оптического зонда во время смещения или сканирования зонда.
Изобретение можно реализовать посредством аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или любого их сочетания. Изобретение или некоторые его признаки также можно реализовать в виде программного обеспечения, исполняемого одним или более процессорами данных и/или цифровыми сигнальными процессорами.
Отдельные элементы варианта осуществления изобретения можно физически, функционально или логически реализовать любым подходящим образом, например, в отдельном блоке, в множестве блоков или в виде части отдельных функциональных блоков. Изобретение можно реализовать в одном блоке или физически и функционально распределить между различными блоками и процессорами.
Несмотря на то что настоящее изобретение описано применительно к конкретным вариантам осуществления, его не следует расценивать в качестве каким-либо образом ограниченного приведенными примерами. Объем настоящего изобретения следует интерпретировать в свете прилагаемой формулы изобретения. В контексте формулы изобретения термины «содержащий» или «содержит» не исключают других возможных элементов или этапов. Также использование форм единственного числа не следует толковать в качестве исключения форм множественного числа. Использование номеров позиций в формуле изобретения в отношении элементов, показанных на чертежах, не следует толковать в качестве ограничения объема изобретения. Кроме того, отдельные признаки, указанные в различных пунктах формулы изобретения, можно комбинировать с возможной пользой, и упоминание этих признаков в других пунктах формулы изобретения не исключает того, что сочетание этих признаков возможно и полезно.
Реферат
Группа изобретений относится к медицине. Оптический зонд содержит: оптический волновод с дистальным концом; корпус и систему привода с приводными катушками, смещающими дистальный конец посредством силы смещения. Оптический волновод установлен внутри корпуса так, чтобы дистальный конец можно было смещать относительно корпуса. Ток возбуждения корректируется посредством цепи привода с контуром обратной связи. Контур обратной связи определяет корректировочный член и содержит: средство для подачи тока возбуждения на приводные катушки; средство для временного выключения тока возбуждения и средство для сравнения заданного положения и измеряемой скорости. Средство для временного выключения тока возбуждения содержит переключатель. Контур обратной связи дополнительно содержит измерительную цепь, выполненную с возможностью измерения скорости дистального конца. Средство для сравнения выполнено с возможностью: получения заданной скорости из заданного положения и сравнения заданной скорости и измеряемой скорости для получения разности; или получения измеряемого положения из измеряемой скорости и сравнения заданного положения и измеряемого положения для получения разности, тем самым корректируя ток возбуждения, если разность превышает предварительно заданный уровень. Система оптической визуализации содержит: оптический зонд, источник излучения и датчик излучения, оптически соединенные с оптическим зондом. Применение данной группы изобретений позволит исключить появление артефактов при конструировании изображения в результате движения зонда. 4 н. и 6 з.п. ф-лы, 6 ил.
Формула
оптический волновод (2, 25), имеющий дистальный конец (3);
корпус (4, 22), причем оптический волновод установлен внутри корпуса так, чтобы дистальный конец можно было смещать относительно корпуса; и
систему (9, 10, 21, 23) привода на основе катушек, которая содержит приводные катушки (9, 23), которые способны смещать дистальный конец посредством силы смещения, индуцированной пропусканием тока возбуждения через приводные катушки; при этом ток возбуждения, представляющий собой заданный ток, связанный с заданным положением и корректировочным членом, корректируется посредством цепи привода с контуром обратной связи, причем контур обратной связи определяет корректировочный член, при этом контур обратной связи содержит:
средство для подачи тока возбуждения на приводные катушки;
средство для временного выключения тока возбуждения, причем средство для временного выключения тока возбуждения содержит переключатель (32);
измерительную цепь (301, 39, 300), выполненную с возможностью измерения скорости дистального конца, когда ток возбуждения выключен, причем скорость дистального конца измеряется посредством измерения напряжения (26) на приводных катушках (23), когда ток возбуждения выключен, или посредством включения измерительной цепи, выполненной с возможностью измерения скорости дистального конца, когда ток возбуждения выключен; и
средство для сравнения заданного положения и измеряемой скорости, причем упомянутое средство для сравнения выполнено с возможностью:
получения заданной скорости из заданного положения и сравнения заданной скорости и измеряемой скорости для получения разности; или
получения измеряемого положения из измеряемой скорости и сравнения заданного положения и измеряемого положения для получения разности,
тем самым корректируя ток возбуждения, если разность превышает предварительно заданный уровень.
источник (62) излучения, оптически соединенный с оптическим зондом, причем зонд выполнен с возможностью направления излучения (64, 600), испускаемого источником излучения, в область (63), представляющую интерес; и
датчик (66) излучения, оптически соединенный с оптическим зондом, причем датчик выполнен с возможностью обнаружения излучения (65, 601), получаемого из области, представляющей интерес.
оптический волновод (2, 25), имеющий дистальный конец (3);
корпус (4, 22), причем оптический волновод установлен внутри корпуса так, чтобы дистальный конец можно было смещать относительно корпуса; и
систему (9, 10, 21, 23) привода на основе катушек, содержащую приводные катушки (9, 23), способные смещать дистальный конец посредством силы смещения, индуцируемой пропусканием тока возбуждения через приводные катушки; при этом ток возбуждения, представляющий собой заданный ток, связанный с заданным положением, корректируют посредством определения корректировочного члена;
при этом способ содержит этапы, при которых:
подают ток возбуждения на приводные катушки;
временно выключают ток возбуждения и измеряют скорость дистального конца, причем скорость дистального конца измеряют посредством измерения напряжения (26) на приводных катушках (23), когда ток возбуждения выключен, за счет включения измерительной цепи, выполненной с возможностью измерения скорости дистального конца, когда ток возбуждения выключен;
сравнивают заданное положение и измеряемую скорость посредством:
получения заданной скорости из заданного положения и сравнения заданной скорости и измеряемой скорости для получения разности; или
получения измеряемого положения из измеряемой скорости и сравнения заданного положения и измеряемого положения для получения разности;
и корректируют ток возбуждения, если разность превышает предварительно заданный уровень.
Комментарии