Система и способ обнаружения и противодействия беспилотным летательным аппаратам - RU2755603C2
Код документа: RU2755603C2
Чертежи






Описание
Область техники
Настоящее изобретение относится к средствам борьбы с беспилотными летательными аппаратами (БПЛА), в том числе в воздушном пространстве населенного пункта. В частности, изобретение относится к решениям по поиску и классификации летательного объекта с последующим определением как БПЛА и принятию мер по защите против БПЛА.
Уровень техники
Беспилотными транспортными средствами (далее - БТС) являются транспортными средствами, оборудованные системой автоматического управления, которые по крайней мере могут передвигаться без участия человека. Такими средствами являются по крайней мере беспилотный наземный транспорт, например, автомобиль, самоходный робот, например, луноход, и беспилотный летательный аппарат, например, квадрокоптер. Бурное развития беспилотных (роботизированных) систем и устройств требует и новых решений по защите от них.
Так, в частности, беспилотные летательные аппараты (далее - БПЛА), также именуемые как дроны (от англ. drones), с каждым годом становятся коммерчески более доступными для приобретения частными лицами, что приводит к большому росту их использования широкой публикой. Такие БПЛА относятся к гражданским БПЛА. Безопасное, на первый взгляд, коммерческое и личное (частное) использование беспилотных летательных аппаратов может быть сопряжено с многочисленными опасностями в случае их ненадлежащей эксплуатации. Такая опасность представляется как для авиации, так и для частной и государственной собственности. Кроме того, БПЛА могут использоваться для нарушения неприкосновенности коммерческой, образовательной, спортивной, развлекательной и государственной жизни. Также БПЛА могут быть использованы для вторжения в частную жизнь или для осуществления террористической и преступной деятельности. Например, БПЛА могут летать в жилых районах, нести взрывчатые вещества или доставлять контрабанду людям. Поэтому необходимы решения для борьбы с БПЛА, в частности решения, позволяющие обнаруживать гражданские БПЛА. Примерами гражданских БПЛА являются дроны таких компаний как DJI, FREEFLY, PARROT и XIAOMI.
Одним из решений указанной задачи являются системы, которые используют радиочастотное обнаружение (радары). Но при этом такие решения имеют непреодолимые трудности при обнаружении летательных объектов малого размера и идентификации среди них беспилотных летательных аппаратов малого размера, т.к. из-за малого размера БПЛА (англ. small unmanned aerial vehicle, SUAV) и их способности летать на различных высотах и скоростях радары не могут обеспечить необходимого уровня обнаружения летательных объектов и их последующие идентификации.
Другим известным решением являются устройства лидар, преимущество которых перед радарами заключается в том, что они обеспечивают более точное определение местоположения и имеют меньший размер пятна, что позволяет формировать более точное изображение цели. Лидар (от англ. LIDAR - это транслитерация от Light Identification Detection and Ranging) - это устройство, предназначенное для обнаружения, идентификации и определения дальности до объектов с помощью света.
Так, например, в патентной заявке US 20180128922A1 представлено решение, представляющее из себя систему датчиков лидар, которая обнаруживает, отслеживает и распознает небольшие беспилотные летательные аппараты (БПЛА), при этом указанная система содержит по крайней мере два лидара, между которыми разделены указанные задачи. В тоже время, данная система не позволяет классифицировать и принять меры, позволяющие обезопасить защищаемое воздушное пространство.
Кроме того, гражданские БПЛА являются частной собственностью, и владелец БПЛА может не знать о нарушение частной жизни или о запрете пересечения границ воздушного пространства объекта, над которым производится полет БПЛА. Поэтому необходимо, чтобы решения по борьбе с БПЛА воздействовали на БПЛА, но не повреждали их.
Еще одним критерием, который требуется учитывать при создании решений по борьбе с БПЛА - это то, что использование гражданских БПЛА как правило производится в воздушном пространстве населенных пунктов (городов, поселков городского типа, сел и пр.). Что также накладывает ряд ограничений на применяемые меры к противодействию БПЛА. Например, необходимо учитывать близость различных городских объектов и использование различных устройств, использующих сотовые сети городской инфраструктуры.
Поэтому существует потребность в создании решения по обнаружению и противодействию в контролируемой зоне воздушного пространства от неизвестных беспилотных летательных аппаратов. Настоящее изобретение обеспечивает интегрированное решение для обнаружения, классификации, опознавания и противодействия беспилотным летательным аппаратам, в частности БПЛА гражданского типа, без их повреждения (без вывода из строя бортовой системы управления БПЛА), и может быть применено в государственных, коммерческих, частных и общественных интересах.
Раскрытие изобретения
Настоящее изобретение было выполнено с учетом описанных выше проблем и недостатков известного уровня техники, и цель настоящего изобретения состоит в том, чтобы обеспечить защиту определенной зоны воздушного пространства вокруг объекта, на котором или рядом с которым установлено настоящее изобретение, от беспилотных летательных аппаратов (БПЛА), в том числе в воздушном пространстве населенного пункта. В частности, изобретение относится к решениям по обнаружению и противодействию неизвестных БПЛА, в случае их проникновения в контролируемое воздушное пространство. Неизвестными БПЛА являются БПЛА, которые не имеет разрешение находиться в контролируемой зоне воздушного пространства.
Настоящее изобретение производит по крайней мере обнаружение движущегося и/или летательного объекта с помощью средства первичного обнаружения, захват обнаруженного объекта с помощью средства распознавания, классификацию обнаруженного объекта на основании по крайней мере одного изображения с помощью средства управления и классификации, опознавание БПЛА с помощью средства управления и классификации в случае определения обнаруженного объекта как БПЛА, и применяет с помощью средства нейтрализации меры по противодействию неизвестному БПЛА, в случае не опознавания БПЛА. Опознавание обнаруженного БПЛА реализуется на основании подходов «свой-чужой». Если БПЛА не опознан, то он является неизвестным БПЛА.
Варианты реализации настоящего изобретения включают в себя как стационарное исполнение, так и мобильное. Кроме того, в одном из вариантов реализации настоящее изобретение может быть интегрировано с действующей системой безопасности, использующейся на объекте, вокруг которого требуется произвести защиту воздушного пространства от БПЛА. Под объектом понимаются как любые сооружения, например, дома и стадионы, так и условно обозначенное пространство, например, аэропорт.
Первый технический результат настоящего изобретения заключается в расширении арсенала технических средств для борьбы с БПЛА, в том числе в воздушном пространстве населенного пункта, путем зондирования воздушного пространства, обнаружения и опознавания БПЛА и применения мер по удалению обнаруженного неизвестного БПЛА из контролируемой зоны воздушного пространства.
Второй технический результат настоящего изобретения заключается в защите воздушного пространства защищаемого объекта, находящийся в том числе в населенном пункте, от неизвестных БПЛА за счет обнаружения, классификации и опознавания БПЛА с последующим удалением из воздушного пространства защищаемого объекта неизвестных БПЛА.
В качестве одного варианта исполнения настоящего изобретения предлагается способ обнаружения и противодействия от неизвестных беспилотных летательных аппаратов (БПЛА), при этом способ включает этапы, на которых: производят с помощью средства первичного обнаружения обнаружение неизвестного летательного объекта в контролируемой зоне воздушного пространства; определяют с помощью средства первичного обнаружения пространственные координаты обнаруженного неизвестного летательного объекта, которые отправляют средству управления и классификации; производят захват обнаруженного неизвестного летательного объекта с помощью средства распознавания; классифицируют с помощью средства управления и классификации обнаруженный неизвестный летательный объект на основе анализа по крайней мере одного изображения, полученного от средства распознавания; при определении с помощью средства управления и классификации неизвестного летательного объекта как БПЛА, производят опознавание БПЛА; при определении БПЛА как неизвестного БПЛА, производят направленное радиоподавление сигнала управления БПЛА с помощью средства нейтрализации до тех пор, пока неизвестное БПЛА не покинет контролируемую зону воздушного пространства.
В другом варианте исполнения способа опознавание неизвестного БПЛА производят путем выявления визуальной метки, GPS-маяка или RFID-метки, указывающие на принадлежность БПЛА. В еще одном варианте исполнения способа для классификации обнаруженного неизвестного объекта при анализе используют нейронные сети.
В другом варианте исполнения способа для захвата обнаруженного неизвестного летательного объекта средства распознавания содержит по крайней мере одну видеокамеру, которая является либо видеокамерой с зумированием, либо видеокамерой с широким углом обзора.
В еще одном варианте исполнения способа в качестве изображения является видеокадр с видеокамеры.
В другом варианте исполнения способа первичное обнаружение неизвестного летательного объекта производят с помощью лидара.
В еще одном варианте исполнения способа пространственными координатами обнаруженного неизвестного летательного объекта по крайней мере являются азимут, высота и расстояние до летательного объекта.
В другом варианте исполнения способа неизвестным БПЛА является БПЛА, который не имеет разрешение находиться в контролируемой зоне воздушного пространства.
В качестве другого варианта исполнения настоящего изобретения предлагается система обнаружения и противодействия от неизвестных беспилотных летательных аппаратах (БПЛА), включающая средство первичного обнаружения, средство распознавания, средство управления и классификации и средство нейтрализации, с помощью которых выполняют каждый этап способа обнаружения и противодействия от неизвестных беспилотных летательных аппаратов.
В другом варианте исполнения системы обнаружение и противодействие от неизвестных БПЛА производится в воздушном пространстве населенного пункта.
Краткое описание чертежей
Дополнительные цели, признаки и преимущества настоящего изобретения будут очевидными из прочтения последующего описания осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
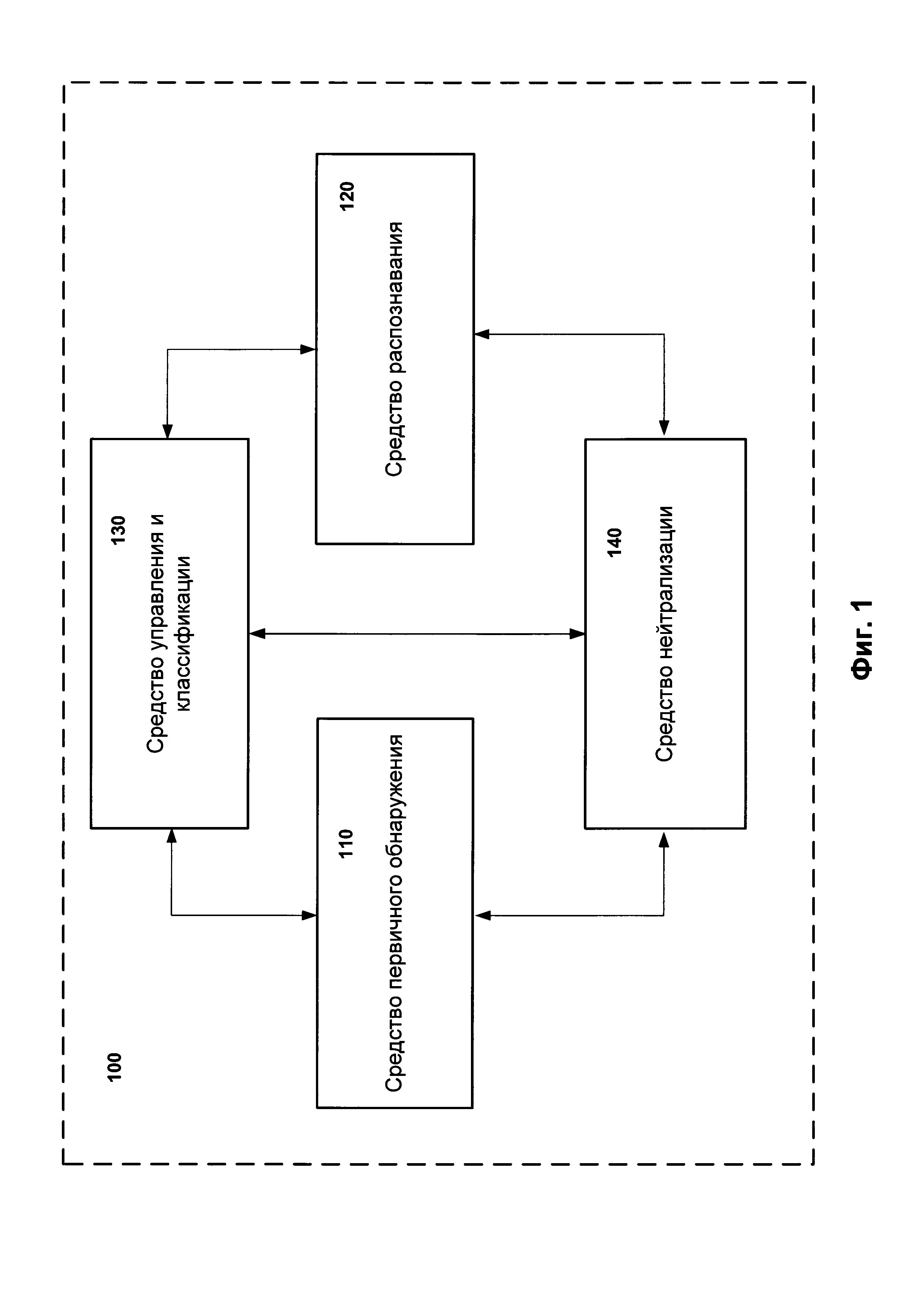
На Фиг. 1 схематично представлена система обнаружения и противодействия БПЛА с возможностью реализовать различные варианты осуществления.
Фиг. 2 иллюстрирует пример прототипа стационарного исполнения системы обнаружения и противодействия БПЛА в воздушном пространстве населенного пункта.
На Фиг. 3 представлен пример первичного обнаружения неизвестного объекта в контролируемой зоне воздушного пространства.
На Фиг. 4 представлен пример захвата неизвестного объекта с помощью видеокамеры с зуммированием.
На Фиг. 5 представлен пример расположения модулей системы защиты от БПЛА на промышленном объекте.
На Фиг. 6 показана блок-схема, иллюстрирующая способ защиты от БПЛА в воздушном пространстве населенного пункта.
Фиг. 7 иллюстрирует пример компьютерной системы общего назначения, с помощью которого может быть реализовано заявленное изобретение.
Хотя изобретение может иметь различные модификации и альтернативные формы, характерные признаки, показанные в качестве примера на чертежах, будут описаны подробно. Следует понимать, однако, что цель описания заключается не в ограничении изобретения конкретным его воплощением. Наоборот, целью описания является охват всех изменений, модификаций, входящих в рамки данного изобретения, как это определено приложенной формуле.
Описание вариантов осуществления изобретения
Объекты и признаки настоящего изобретения, способы для достижения этих объектов и признаков станут очевидными посредством отсылки к примерным вариантам осуществления. Однако настоящее изобретение не ограничивается примерными вариантами осуществления, раскрытыми ниже, оно может воплощаться в различных видах. Приведенное описание предназначено для помощи специалисту в области техники для исчерпывающего понимания изобретения, которое определяется только в объеме приложенной формулы.
Настоящее изобретение позволяет решить недостатки предшествующего уровня техники, представляя систему и способ обнаружения и противодействия беспилотным транспортным средствам (БТС). Под БТС понимается такие виды устройств как наземное транспортное средство и воздушное транспортное средство. Наземным транспортным средством, в частном случае, являются роботизированное самоходное устройство и беспилотный наземный транспорт, например, автомобиль. Воздушным транспортным средством в частном случае, является беспилотный летательный аппарат. В частном случае реализации изобретения, обнаружение и противодействие осуществляется по крайней мере с беспилотными летательными аппаратами (БПЛА). Одним из преимуществ указанного изобретения является возможность его использования в населенных пунктах (городах), при этом не нанося повреждения инфраструктуре населенных пунктов, а также самим БПЛА. Примерами таких повреждений являются повреждения, связанные со столкновением БПЛА со строительными объектами (например, зданиями), установленными на них антеннами, или повреждения, связанные с нарушением работы различных устройств из-за подавления радиочастот вовремя применение мер борьбы с БПЛА, например, подавление сигнала взаимодействия БПЛА с его оператором. Возможность использования в населенных пунктах настоящего изобретения достигается тем, что противодействие БПЛА осуществляется с помощью использования направленной радиоантенны для борьбы с БПЛА, без вывода из строя бортовой системы управления БПЛА и без ограничения в действиях механизмов полета БПЛА (например, винтов, пропеллеров), что позволяет БПЛА не столкнуться с каким-либо объектом.
Другим преимуществом указанного изобретения является использование в своем составе лидара, с помощью которого по крайней мере производится поиск и первичное обнаружение летательных объектов в воздушном пространстве. Так, лидар с помощью лазерного зондирования пространства определяет в определенной зоне облако точек, которые затем анализируются и позволяют распознать посторонний/неизвестный летательный объект.
В первую очередь настоящее изобретение предназначено для обеспечения защиты от различных гражданских БПЛА. Примерами таких БПЛА могут являться квадрокоптеры, созданные такими компаниями как DJI (модели PHANTOM, INSPIRE, MAVIC, M600, S1000), FREEFLY (модель ALTA), PARROT и XIAOMI.
В зависимости от варианта исполнения настоящее изобретение может быть реализовано как в стационарном, так и в мобильном исполнении, примеры реализации которых представлены далее.
Для выполнения своего предназначения система обнаружения и противодействия БТС, а в частном случае БПЛА, должна быть установлена или развернута либо непосредственно на объекте, вокруг которого необходимо защитить воздушное пространство от БПЛА, либо рядом с указанным объектом. Под объектом, который требуется защитить от БТС, а в частном случае БПЛА, подразумевается по крайней мере какое-либо конкретное строение (например, стадион, жилой дом), целая инфраструктура (например, аэропорт, морской порт, промышленный комплекс), населенный пункт (например, город сельского типа) и место проведения массового мероприятия. Также различные варианты реализации позволяют устанавливать указанную систему как на неподвижный объект, например, на крышу здания, так и на подвижный, например, автомобиль, который оборудован местом размещения для указанной системы. Кроме того, система имеет возможность также быть интегрированной с существующими системами безопасности, которые используется на объектах (например, в аэропортах, портах и стадионах). После развертывания указанной системы для защиты воздушного пространства объекта от БТС, а в частном случае БПЛА, система запускается в режиме поиска БТС, а в частном случае БПЛА. Также настоящее изобретение имеет возможность регулировки в соответствии с требованиями, присущими месту расположения настоящего изобретения. Примерами таких требований являются климатические условия, определенная зона воздушного пространства и ее границы.
В различных вариантах реализации обнаружение и/или нейтрализация нескольких летательных объектов, в том числе и БПЛА, в контролируемой зоне может производиться как последовательно, так и одновременно, и зависит от состава настоящего изобретения и технических возможностей средств, входящих в указанный состав. Также настоящее изобретение может производить нейтрализацию определенного БТС. Для это настоящее изобретение получит сведения по крайней мере о виде и/или типе БТС, от которого необходимо произвести защиту определенной зоны пространства.
Далее на фигурах представлены примеры вариантов реализации настоящего изобретения на основании защиты контролируемого пространства от беспилотных летательных аппаратов в воздушном пространстве населенного пункта, при этом настоящее изобретение не ограничивается только защитой от БПЛА, а также может быть использовано подобным образом при защите от других видов БТС.
На Фиг. 1 схематично представлена система обнаружения и противодействия БПЛА 100. В предпочтительном варианте осуществления система обнаружения и противодействия БПЛА 100 (далее - система защиты от БПЛА 100) состоит по крайней мере из средства первичного обнаружения 110, средства распознавания 120, средства управления и классификации 130 и средства нейтрализации 140. Кроме того, каждое средство использует программное обеспечение (ПО), позволяющие взаимодействовать друг с другом и выполнять свое предназначение.
Средство первичного обнаружения 110 предназначено для обнаружения любого движущегося и/или летательного объекта в воздушном пространстве с последующим определением пространственных координат обнаруженного движущегося и/или летательного объекта. Данное средство 110 взаимодействует по крайней мере со средством управления и классификации 130. Взаимодействие включает передачу определенных данных при зондировании воздушного пространства и определенных координат обнаруживаемых объектов. В качестве координат передаются по крайней мере азимут, высота и расстояние до обнаруженного летательного объекта.
Стоит отметить, что границы поиска и обнаружения летательного объекта ограничиваются либо техническими возможностями устройств, с помощью которых осуществляется средство первичного обнаружения 110 при реализации системы защиты от БПЛА 100, либо заранее определенными границами зоны контроля воздушного пространства, в которой требуется ограничить полет БПЛА. В зависимости от реализации средства 110 обнаружение нескольких летательных объектов может производиться как одновременно, так и поочередно.
Средство первичного обнаружения 110 может быть реализовано по крайней мере с помощью GPS (от англ. Global Positioning System) - приемника и по крайней мере одного из следующих устройств, либо на принципах, заложенных в указанных устройствах:
• лидара, использующий лазерное зондирование пространства;
• видеокамеры общего вида, т.е. видеокамера, имеющая широкий угол обзора;
• аудиоприемника, например, микрофон;
• радиочастотного устройства (радара).
При этом использующиеся устройства содержат ПО, позволяющее получать необходимую информацию и взаимодействовать с другими средствами системы защиты от БПЛА 100. Упомянутое ПО создается и адаптируется в зависимости от варианта реализации системы защиты от БПЛА 100, при этом создание и адаптация ПО за рамками настоящего изобретения. В предпочтительном варианте реализации средство первичного обнаружения 110 основывается на всенаправленном лидаре, который осуществляет поиск БПЛА с помощью лазерного зондирования, совместно с GPS-приемником, при этом лазерное зондирование осуществляется в секторе сканирования от 0 до 360 градусов по горизонтали и а угол сканирования от 0 до 90 градусов по вертикали, при этом окно по вертикали достигает по меньшей мере 45 градусов. В зависимости от варианта реализации расстояние до БПЛА, на котором БПЛА может быть обнаружен, колеблется в диапазоне, например, 0,2-5 км. В то же время расстояние может быть как уменьшено, так и увеличено в случае необходимости и технической возможности средства первичного обнаружения 110.
В еще одном варианте реализации средство первичного обнаружения 110 состоит из лидара, GPS-приемника и по крайней мере одной видеокамеры. В этом случае первичное обнаружение производится совместно лидаром и видеокамерой. Стоит отметить, что количество видеокамер зависит от зоны воздушного пространства, которую требуется защищать, и необходимого сектора сканирования (от 0 градусов до 360 градусов). Так, например, 10 (десять) видеокамер, установленные по кругу, соответствуют требованию обеспечить круговой обзор. Видеокамеры связаны друг с другом, осуществляют взаимодействие по крайней мере со средством управления и классификации 130, что обеспечивает поиск БПЛА параллельно с лидаром.
В еще одном варианте реализации средство первичного обнаружения 110 дополнительно включает по крайней мере один аудиоприемник, который совместно со средством управления и классификации 130 также производит поиск БПЛА.
Предварительная настройка/калибровка и дальнейшее управление средством первичного обнаружения 110 осуществляется с помощью средства управления и классификации 130. Примером калибровки является определение пространственных координат средства первичного обнаружения 110 относительно других средств системы защиты от БПЛА 100, либо относительно объекта, вокруг которого необходимо защитить воздушное пространство. Под управлением средством первичного обнаружения 110 понимается, например, определение границ зоны воздушного пространства вокруг упомянутого объекта, которую требуется защитить от полетов БПЛА.
Средство распознавания 120 предназначено для 1) захвата обнаруженного летательного объекта согласно полученным данным от средства управления и классификации 130, где данные содержат информацию о пространственных координатах обнаруженного объекта, 2) сопровождения (наблюдения за перемещением) захваченного объекта, и 3) передачи сведений о захваченном объекте средству управления и классификации 130.
В предпочтительном варианте реализации средство распознавания 120 состоит из двух видеокамер, установленных на опорно-поворотном модуле (далее - ОПМ). Одна видеокамера позволяет осуществлять сопровождение (видеонаблюдение) за объектом в большом угловом поле, а другая видеокамера имеет меньшее угловое поле, но позволяет получить с более высоким разрешением изображение объекта за счет зуммирования. Другими словами, одна видеокамера является так называемой камерой общего вида, а другая - видеокамерой с зуммированием. В предпочтительном варианте видеокамера общего вида является видеокамерой с широкоугольным объективом, а видеокамера с зуммированием является видеокамерой, содержащей объектив с высоким переменным фокусным расстоянием, позволяющая изменять масштаб изображения объекта при его съемке с одной точки.
Управление ОПМ осуществляется с помощью средства управления и классификации 130, которое отправляет команды на ОПМ для разворота средства распознавания 120, например, установленных видеокамер в направлении обнаруженного летательного объекта. Видеокамера с зуммированием позволяет изменять масштаб (увеличить) изображения летательного объекта как при помощи оптического увеличения, так и при помощи цифрового увеличения.
Стоит отметить, что средство распознавания 120 может осуществлять свое предназначение и с помощью по крайней мере одной видеокамеры. Отчасти вариант реализации зависит от технических характеристик видеокамер и зоны воздушного пространства, которую требуется защитить от БПЛА. В одном из вариантов реализации, когда средство первичного обнаружения 110 содержит в своем составе по крайней мере одну видеокамеру, то средство распознавания 120 будет содержать только видеокамеру с зуммированием.
В других вариантах реализации средство распознавания 120 состоит или дополнительного включает по крайней мере одно из следующих устройств: фотокамеру, прибор ночного видения и тепловизор. Кроме того, средство распознавания 120 также может включать и другие устройства, позволяющие обнаруживать, наблюдать и получить информацию о летательном объекте в воздушном пространстве для последующего анализа.
Средство управления и классификации 130 предназначено для обработки данных, получаемых от средства первичного обнаружения 110 и средства распознавания 120, управления ОПМ и средствами 110, 120 и 140, а также для классификации обнаруженного летательного объекта, при этом классификация включает по меньшей мере анализ полученных данных от средства распознавания 120 с помощью технологии «искусственная нейронная сеть» (ИНС) и вынесения решения о соответствии обнаруженного объекта какому-либо БПЛА. В качестве данных, представляемых для анализа, средство распознавания 120 представляет по крайней мере различные изображения, которые зависят от устройства, с помощью которого они сформированы. Так, например, видеокамера представляет по меньшей мере один видеокадр, а фотокамера в свою очередь представляет фотоснимок. При определении обнаруженного объекта как БПЛА, средство управления и классификации 130 отправляет задачу на противодействие обнаруженного БПЛА средству нейтрализации 140.
Технология «искусственная нейронная сеть» (ИНС), которая также называется нейронной сетью, при реализации заявленного изобретения в первую очередь используется для обнаружения объектов на изображениях и их дальнейшей классификации. В качестве изображений, например, выступают видеокадры, получаемые по крайней мере от средства распознавания 120. Используемая ИНС средством управления и классификации 130 для анализа видеокадров предварительно была обучена, а также имеет возможность производить дообучение и в процессе работы. Обучение ИНС производилось на подготовленном перечне видеокадров, на которых представлены различные летательные объекты, в том числе и БПЛА различных видов и типов, в различных климатических условиях, под различными ракурсами и с различной освещенностью фона. В одном из частных вариантов реализации ИНС используется сверточная нейронная сеть (англ. convolutional neural network, CNN), которая позволяет эффективно распознавать объекты на изображениях.
В предпочтительном варианте реализации средство управления и классификации 130 представляет собой сервер (например, GPU-server). В общем случае реализации под сервером может пониматься компьютерная система, например, такая как описана на Фиг. 7. Под компьютерной системой может пониматься как персональный компьютер, такой как настольный компьютер, ноутбук и нетбук, так и электронное устройство с беспроводной связью, например, мобильный телефон, смартфон и планшет. Компьютерная система включает в себя различное программное обеспечение, такое как: аппаратное, программное и/или системное.
Средство нейтрализации 140 предназначено для борьбы с обнаруженным БПЛА, где под борьбой понимается выведение БПЛА из контролируемого воздушного пространства. В предпочтительном виде реализации в качестве средства нейтрализации 140 используется по крайней мере одна антенна, позволяющая произвести направленное радиоподавление сигнала, с помощью которого управляется обнаруженный БПЛА. Радиоподавление производится до тех пор, пока БПЛА не покинет контролируемую зону воздушного пространства. Используемая антенна производит радиоподавление по крайней мере в некотором диапазоне (например, 20-25 градусов) с мощностью, позволяющей заглушить сигнал на заданном расстоянии, в определенном диапазоне частот. Так, например, расстояние подавления БПЛА составляет по меньшей мере до 600 метров, мощность подавления не менее 100 МВт, а диапазон частот, в которых излучает антенна, включает по крайней мере частоты: 900 МГц, 1.2 ГГц, 2.4МГц, 5.8 ГГц, L1 и L2, при этом подавление сигнала канала связи БПЛА производится с помощью источника белого шума, без глушения GPS-приемника БПЛА.
В одном из вариантов реализации средство нейтрализации 140 размещается совместно со средством распознавания 120 на поворотной платформе ОПМ, позволяющей изменять положение средств в соответствии с перемещением обнаруженного летательного объекта.
Варианты реализации настоящего изобретения включают как стационарное исполнение, так и мобильное. Кроме того, в одном из вариантов реализации настоящее изобретение может быть интегрировано в действующую систему безопасности, использующуюся на объекте, вокруг которого требуется произвести защиту воздушного пространство от БПЛА.
При интеграции системы защиты от БПЛА 100 с упомянутой системой безопасности производится с помощью средства управления и классификации 130 ее адаптация, во время которой определяются все доступные устройства системы безопасности, например, дополнительные видеокамеры, после чего производится настройка определенных устройств для совместного использования выявленных устройств и средств система защиты от БПЛА 100. Стоит отметить, что при интеграции системы защиты от БПЛА в систему безопасности средство управления и классификации 130 может быть реализовано при помощи сервера управления системы безопасности, при этом производится установка по крайней мере ПО, включающего ИНС.
Сценарий работы заявленной системы 100 представлен при описании одного из вариантов реализации, проиллюстрированного на Фиг. 2.
На Фиг. 2 представлен пример прототипа стационарного исполнения системы защиты от БПЛА 100. Так, система защиты от БПЛА 100 состоит из модуля первичного обнаружения 210, модуля распознавания и нейтрализации 250 и модуля обработки данных 290. В свою очередь модуль первичного обнаружения выполняет функции средства первичного обнаружения 110 и включает лидар 220, GPS-приемник 230 и магнетометр (не представлен на Фиг. 2). Модуль распознавания и нейтрализации 250 объединяет в себе функции средства распознавания 120 и средства нейтрализации 140. Модуль 250 установлен на ОПМ 240, при этом средство распознавания 120 выполнено в качестве двух видеокамер: видеокамеры общего вида 260 и видеокамеры с зуммированием 265, а в качестве средства нейтрализации 140 используется набор радиоантенн 270. Набор радиоантенн 270 содержит антенны для радиоподавления, где каждая антенна работает на определенной радиочастоте. Частоты или диапазон частот определяются согласно частотам, на которых работают БПЛА. Модуль обработки данных 290 выполняет задачи и функции средства управления и классификации 130 и представляет собой сервер, содержащий компьютерную систему, позволяющую обрабатывать большой объем данных, в частности графических данных, при этом модуль 290 выполнен в индивидуальном корпусе. Такая реализация обеспечивает достаточную мобильность и эргономичность системы защиты от БПЛА 100. Связь между модулями 210, 250 и 290 обеспечивается по меньшей мере при помощи проводной связи (кабельные соединения).
Предварительно все указанные модули системы защиты от БПЛА 100 устанавливаются либо непосредственно на самом объекте, вокруг которого требуется защитить воздушное пространство от БПЛА, либо рядом с ним. Далее система защиты от БПЛА 100 запускается в режиме поиска БПЛА. В случае необходимости также может быть произведена настройка системы защиты от БПЛА 100 в соответствии с географическим местом расположения. Так, например, настройка может включать по крайней мере одно из:
1) определение пространственных координат самой системы защиты от БПЛА 100 и ее модулей относительно друг друга, если модули разделены, в частности модуля первичного обнаружения 210 и модуля распознавания и нейтрализации 290;
2) определение границ зоны воздушного пространства, в которой будет производится защита от полетов БПЛА;
3) настройка используемой модулем обработки данных 290 в своих вычислениях нейронной сети, при этом настройка может включать и дообучение нейронной сети в соответствии с условиями эксплуатации системы защиты от БПЛА 100;
4) формирование зоны воздушного пространства для поиска БПЛА для объекта, который защищается;
5) формирование области в контролируемой зоне воздушного пространства, которую требуется защитить от БПЛА;
6) формирование карты расположения объектов в контролируемой зоне воздушного пространства с помощью модуля первичного обнаружения 210, в частности, при помощи лидара 220.
Итак, система защиты от БПЛА 100 запущена в режиме поиска летательных объектов в контролируемой зоне воздушного пространства.
При появлении какого-либо летательного объекта в контролируемой зоне воздушного пространства модуль первичного обнаружения 210 с помощью лидара 220 обнаруживает его и определяет координаты обнаруженного летательного объекта, которые передает модулю обработки данных 230.
В одном из вариантов реализации процесс обнаружения летательного объекта заключается в следующем. Лидар 220 производит лазерное зондирование воздушного пространства, во время которого передает информацию модулю обработки данных 290. Предоставляемая информация содержит данные о расположении различных объектов в контролируемой зоне воздушного пространства в виде точек, которые формируются от отражения лучей лазера от различных поверхностей, в том числи и объектов. Модуль 290 определяет наличие летательного объекта на основании сравнения получаемой информации от лидара 220. В еще одном из вариантов реализации, в котором была сформирована карта зоны воздушного пространства, сравнение производится с ней. Далее лидар 220 совместно с GPS-приемником 230 определяет пространственные координаты обнаруженного летательного объекта, а также дальнейшее отслеживание движения, и передает их в режиме реального времени модулю обработки данных 290. Пример обнаружения и отображения летательного объекта с помощью лидара 220 представлен на Фиг. 3, где в квадрате обнаружен летательный объект.
Далее модуль обработки данных 290 отправляет команду опорно-поворотному модулю (ОПМ), который производит разворот так, чтобы модуль распознавания и нейтрализации 250 был направлен в сторону неизвестного обнаруженного летательного объекта. Также модуль обработки данных 290 отправляет координаты летательного объекта модулю распознавания и нейтрализации 250.
Модуль распознавания и нейтрализации 250 при помощи по крайней мере одной из упомянутых видеокамер производит захват неизвестного обнаруженного летательного объекта с последующим сопровождением его движения, полета. Во время сопровождения обнаруженного летательного объекта модуль 250 производит зуммирование (приближение) на упомянутый объект с помощью видеокамеры с зуммированием 265 так, чтобы можно было сформировать по меньшей мере один цифровой видеокадр с обнаруженным объектом для дальнейшей его идентификации. Видеокамера с зуммированием 265 является видеокамерой, содержащей объектив с высоким переменным фокусным расстоянием, позволяющий изменять масштаб изображения объекта при его съемке с одной точки. Видеокамера 260 является видеокамерой с широкоугольным объективом и предназначена для того, чтобы определить и отслеживать направление движения летательного объекта, т.е. не потерять его из вида. Стоит отметить, что захват летательного объекта при наличии в составе модуля 250 упомянутых двух видеокамер 260 и 265 может быть произведен несколькими способами. Первый, захват производится одновременно обоими видеокамерами. Второй, захват производится сначала видеокамерой общего вида 260, затем производится коррекция видеокамеры с зуммированием 265 для захвата объекта. Третий, захват производится сначала видеокамерой с зуммированием 265, которая продолжает производить сопровождение (контроль движения) объекта с последующим при необходимости наведением камеры общего вида 260. При этом эффективность каждого варианта захвата летательного объекта зависит от расстояния до указанного летательного объекта и скорости передвижения летательного объекта. Стоит отметить, что под захватом объекта понимается по крайней мере промежуточный этап в процессе обработки информации об объекте между этапами обнаружения и сопровождения.
В предпочтительном варианте реализации видеокамера с зумированием 265 производит сначала приближение на середину расстояния до объекта для того, чтобы по крайней мере захватить летательный объект (например, в виде точки) на видеокадрах, после чего производит необходимое изменение масштаба для увеличения летательного объекта на видеокадрах. Пример захвата неизвестного летательного объекта с помощью видеокамеры с зуммированием 265 представлен на Фиг. 4, на котором представлен захваченный летательный объект после приближения к нему. Стоит отметить, что использование двух разных видеокамер в составе модуля распознавания и нейтрализации 250 позволяет с высокой степенью гарантировать фокусировку на летательном объекте, что позволяет обеспечить сопровождение неизвестного летательного объекта во время его движения.
В других вариантах реализации видеокамера 260 также производит формирование видеокадров с захваченным неизвестным летательным объектом, которые передает модуль обработки данных 290.
После захвата модуль 250 производит передачу по меньшей мере одного видеокадра с захваченным объектом модулю обработки данных 290. Стоит отметить, что при этом производится регулировка масштаба изображения летательного объекта для получения по меньшей мере одного наиболее качественного видеокадра. Необходимость изменения масштаба (приближения или отдаления) определяется при помощи модуля 290 в зависимости от анализа видеокадров при распознавании обнаруженного летального объекта.
Модуль обработки данных 290 производит анализ полученных данных с помощью нейронной сети, на вход которой подаются по крайней мере один полученный видеокадр от модуля 250, с целью классификации неизвестного обнаруженного летательного объекта. Упомянутыми данными являются по крайней мере видеокадры по крайней мере с одной из упомянутых видеокамер 260 и 265, а также информация с других устройств, использующихся в составе модуля распознавания и нейтрализации 250 или модуля первичного обнаружения 210. Такими устройствами могут являться по крайней мере лидар, аудиоприемник и радар. По результатам анализа с помощью нейронной сети модуль 290 выносит решение о соответствии неизвестного обнаруженного летательного объекта по крайней мере одному типу беспилотных летательных аппаратов (БПЛА) или конкретной модели БПЛА. При определении обнаруженного летательного объекта как БПЛА, модуль 290 передает сигнал модулю распознавания и нейтрализации 250, а именно, средству нейтрализации 140, о необходимости противодействия обнаруженному БПЛА.
Модуль распознавания и нейтрализации 250 при помощи средства нейтрализации 140, содержащего набор радиоантенн 270, ориентирует радиоантенны 270 на обнаруженный БПЛА и производит направленное радио подавление БПЛА, в частности, производится подавление сигнала управления обнаруженным БПЛА до тех пор, пока БПЛА не покинет контролируемое воздушное пространство. Тип используемой радиочастоты или диапазона радиочастот для глушения модуль распознавания и нейтрализации 250 также получает от модуля обработки данных 290, который определяет согласно определенному БПЛА. После удаления обнаруженного БПЛА из контролируемой зоны воздушного пространства работа средства нейтрализации 140 прекращается.
В частном случае реализации системы защиты от БПЛА 100 при одновременном обнаружении двух и более неизвестных летательных объектов при помощи модуля первичного обнаружения 210 производится их приоритезация с помощью модуля 290 для принятия решения о порядке их классификации и последующей нейтрализации, в случае необходимости. Формирования очереди указанных объектов производится по крайней мере на основании сравнения расстояния до обнаруженных летательных объектов и их скорости приближения.
В еще одном частном случае реализации система защиты от БПЛА 100 после определения неизвестного летательного объекта как БПЛА, дополнительно имеет возможность произвести распознавания БПЛА о его принадлежности и/или возможности нахождения в контролируемой зоне воздушного пространства. Для этого используется подход «свой-чужой». Так, например, для опознавания БПЛА система защиты от БПЛА 100 производит дополнительный анализ. Дополнительный анализа основывается на возможности выявления на корпусе БПЛА визуальных меток, использовании инфракрасных излучателей, RFID (от англ. Radio Frequency IDentification) - меток или GPS-маяков. Соответственно, в зависимости от использования одного из представленных подходов БПЛА может быть опознан как «свой» или «чужой». Например, если БПЛА обладает GPS-маяком, то система защиты от БПЛА 100 будет получать координаты от такого БПЛА на основании которых будет опознавать БПЛА. В случае определения, что БПЛА имеет разрешение находиться в контролируемой зоне, противодействие не производится. В противном случае, если БПЛА опознан как неизвестный, противодействие осуществляется, как указано выше.
В других частных вариантах реализации система защиты от БПЛА 100 может содержать в своем составе от двух и более модулей первичного обнаружения 210 и модулей распознавания и нейтрализации 250. В этом случае, система защиты от БПЛА 100 также позволит производить захват и одновременную нейтрализацию двух и более обнаруженных БПЛА.
В еще одном частном случае реализации контролируемая зона воздушного пространства разделена на сектора по удаленности от защищаемого объекта. На основании разделенных секторов система защиты от БПЛА 100 какой модуль выполняет свое назначение. Например, модуль первичного обнаружения 210 производит поиск летательных объектов во всех секторах, а модуль распознавания и нейтрализации 250 только на ближних секторах, которые определены на основании расстояния, на котором средство модуля 250 может выполнить свое назначение. Сектора и работа того или иного модуля системы защиты от БПЛА 100 настраиваются в зависимости от их технических возможностей и необходимости защиты в том или ином секторе контролируемой зоны воздушного пространства от БПЛА.
На Фиг. 5 проиллюстрирован пример расположения модулей системы борьбы с БПЛА в воздушном пространстве промышленного объекта в населенном пункте.
На Фиг. 6 показана блок-схема, иллюстрирующая способ защиты от БПЛА в воздушном пространстве населенного пункта. Представленный способ реализуется с помощью системы, описанной на Фиг. 1. На этапе 310 производят первичное обнаружение летательного объекта в контролируемой зоне воздушного пространства. Первичное обнаружение производится по крайней мере с помощью лидара 220, который производит поиск лазерным зондированием воздушного пространства. На данном этапе лидар 220 позволяет только обнаружить летательный объект, не распознать его. Поэтому все обнаруженные летательные объекты также являются неизвестными летательными объектами. При обнаружении по крайней мере одного летательного объекта в контролируемой зоне воздушного пространства переходят к этапу 320.
На этапе 320 определяют пространственные координаты каждого обнаруженного летательного объекта, которые отправляют средству управления и классификации 130. Под пространственными координатами обнаруженного летательного объекта понимаются по крайней мере азимут, высота и расстояние до летательного объекта. Средство управления и классификации 130 передает полученные координаты средству распознавания 120 для захвата летательного объекта.
На этапе 330 производят захват обнаруженного летательного объекта с помощью по крайней мере одной видеокамеры средства распознавания 120. После захвата осуществляют сопровождение летального объекта и формируют видеокадры с захваченным летательным объектом, которые передают средству классификации 130. В предпочтительном варианте исполнения захват производится с помощью двух видеокамер, где первая видеокамера является видеокамерой с широкоугольным объективом 260, а вторая видеокамера является видеокамерой с зуммированием 265. Обе видеокамеры производят захват летательного объекта и передачу видеокадров.
На этапе 340 классифицируют с помощью средства управления и классификации 130 обнаруженный объект на основе анализа по меньшей мере одного видеокадра из видеокадров, получаемых по крайней мере с одной видеокамеры. Для классификации обнаруженного объекта средство классификации 130 использует при анализе видеокадров нейронную сеть. Нейронная сеть предварительно была обучена на перечне тестовых изображений, где были представлены различные летальные объекты под различными ракурсами и с различным фоном. С помощью нейронной сети анализируется каждый получаемый видеокадр и выносится решение. Решение содержит информацию о принадлежности к какому-либо летательному объекту, в том числе и БПЛА. Кроме того, при определении летательного объекта как БПЛА, также решение может содержать информацию о типе и модели БПЛА. В частном случае реализации в случае определения летального объекта как неизвестного объекта, средство классификации либо проинформирует оператора системы защиты от БПЛА 100 о таком решении и будет ожидать ответа, либо произведет дополнительный анализ, который может быть основан на анализе вероятностей летального объекта на соответствие какому-либо типу объектов и после вынесет повторное решение соответствует ли неизвестный объект БПЛА. Еще в одном случае реализации средство управления и классификации 130 будет запрашивать дополнительные видеокадры и анализировать их с помощью нейронной сети до тех пор, пока не будет вынесено решение, в котором будет классифицирован обнаруженный летательный объект. В том случае, если обнаруженный летательный объект определен как БПЛА, переходят к этапу 350.
На этапе 350 при определении объекта как БПЛА, производят направленное радиоподавление сигнала управления БПЛА с помощью средства нейтрализации 140 до тех пор, пока БПЛА не покинет контролируемую зону воздушного пространства. Подавление производят с помощью перечня радиоантенн, например, радиоантенн 270. После удаления обнаруженного БПЛА из контролируемой зоны воздушного пространства подавление прекращается. Система защиты от БПЛА 100 продолжает дальнейший поиск летательных объектов.
В частном случае реализации при определении с помощью средства классификации 130 неизвестного обнаруженного летательного объекта как БПЛА на дополнительном шаге 345 (не представлен на Фиг. 6) производят опознавание БПЛА. Опознание БПЛА включает определение принадлежности БПЛА к БПЛА, которым разрешен полет в контролируемой зоне воздушного пространства. Механизм опознавания БПЛА использует подходы опознавания «свой-чужой». В зависимости от варианта реализации при опознавании принадлежность БПЛА используются визуальные метки на корпусе БПЛА, ИК-излучатели, RFID-метки или GPS-маяки. В случае, если неизвестный обнаруженный БПЛА принадлежит к БПЛА, которым разрешен полет в контролируемой зоне воздушного пространства, система защиты от БПЛА 100 прекращает захват указанного БПЛА или сопровождает его, но позволяет продолжить движение в воздушном пространстве. В противном случае, если БПЛА не опознан, переходят к этапу 350.
Фиг. 7 представляет пример компьютерной системы 20 общего назначения, которая может быть использована как компьютер клиента (например, персональный компьютер) или сервер, представленные на Фиг. 1. Компьютерная система 20 содержит центральный процессор 21, системную память 22 и системную шину 23, которая содержит разные системные компоненты, в том числе память, связанную с центральным процессором 21. Системная шина 23 реализована, как любая известная из уровня техники шинная структура, содержащая в свою очередь память шины или контроллер памяти шины, периферийную шину и локальную шину, которая способна взаимодействовать с любой другой шинной архитектурой. Системная память содержит постоянное запоминающее устройство (ПЗУ) 24, память с произвольным доступом (ОЗУ) 25. Основная система ввода/вывода (BIOS) 26, содержит основные процедуры, которые обеспечивают передачу информации между элементами компьютерной системы 20, например, в момент загрузки операционной системы с использованием ПЗУ 24.
Компьютерная система 20 в свою очередь содержит жесткий диск 27 для чтения и записи данных, привод магнитных дисков 28 для чтения и записи на сменные магнитные диски 29 и оптический привод 30 для чтения и записи на сменные оптические диски 31, такие как CD-ROM, DVD-ROM и иные оптические носители информации. Жесткий диск 27, привод магнитных дисков 28, оптический привод 30 соединены с системной шиной 23 через интерфейс жесткого диска 32, интерфейс магнитных дисков 33 и интерфейс оптического привода 34 соответственно. Приводы и соответствующие компьютерные носители информации представляют собой энергонезависимые средства хранения компьютерных инструкций, структур данных, программных модулей и прочих данных компьютерной системы 20.
Настоящее описание раскрывает реализацию системы, которая использует жесткий диск 27, сменный магнитный диск 29 и сменный оптический диск 31, но следует понимать, что возможно применение иных типов компьютерных носителей информации 56, которые способны хранить данные в доступной для чтения компьютером форме (твердотельные накопители, флеш карты памяти, цифровые диски, память с произвольным доступом (ОЗУ) и т.п.), которые подключены к системной шине 23 через контроллер 55.
Компьютер 20 имеет файловую систему 36, где хранится записанная операционная система 35, а также дополнительные программные приложения 37, другие программные модули 38 и данные программ 39. Пользователь имеет возможность вводить команды и информацию в персональный компьютер 20 посредством устройств ввода (клавиатуры 40, манипулятора «мышь» 42). Могут использоваться другие устройства ввода (не отображены): микрофон, джойстик, игровая консоль, сканнер и т.п. Подобные устройства ввода по своему обычаю подключают к компьютерной системе 20 через последовательный порт 46, который в свою очередь подсоединен к системной шине, но могут быть подключены иным способом, например, при помощи параллельного порта, игрового порта или универсальной последовательной шины (USB). Монитор 47 или иной тип устройства отображения также подсоединен к системной шине 23 через интерфейс, такой как видеоадаптер 48. В дополнение к монитору 47, персональный компьютер может быть оснащен другими периферийными устройствами вывода (не отображены), например, колонками, принтером и т.п.
Компьютерная система 20 способна работать в сетевом окружении, при этом используется сетевое соединение с другим или несколькими удаленными компьютерами 49. Удаленный компьютер (или компьютеры) 49 являются такими же персональными компьютерами или серверами, которые имеют большинство или все упомянутые элементы, отмеченные ранее при описании существа компьютерной системы 20, представленного на Фиг. 7. В вычислительной сети могут присутствовать также и другие устройства, например, маршрутизаторы, сетевые станции, пиринговые устройства или иные сетевые узлы.
Сетевые соединения могут образовывать локальную вычислительную сеть (LAN) 50 и глобальную вычислительную сеть (WAN). Такие сети применяются в корпоративных компьютерных сетях, внутренних сетях компаний и, как правило, имеют доступ к сети Интернет. В LAN- или WAN-сетях компьютерная система (персональный компьютер) 20 подключена к локальной сети 50 через сетевой адаптер или сетевой интерфейс 51. При использовании сетей персональный компьютер 20 может использовать модем 54 или иные средства обеспечения связи с глобальной вычислительной сетью, такой как Интернет. Модем 54, который является внутренним или внешним устройством, подключен к системной шине 23 посредством последовательного порта 46. Следует уточнить, что сетевые соединения являются лишь примерными и не обязаны отображать точную конфигурацию сети, т.е. в действительности существуют иные способы установления соединения техническими средствами связи одного компьютера с другим.
В заключение следует отметить, что приведенные в описании сведения являются примерами, которые не ограничивают объем настоящего изобретения, определенного формулой. Специалисту в данной области становится понятным, что могут существовать и другие варианты осуществления настоящего изобретения, согласующиеся с сущностью и объемом настоящего изобретения.
Реферат
Настоящее изобретение относится к средствам обнаружения и противодействия беспилотным летательным аппаратам (БПЛА) гражданского типа в контролируемой зоне. Технический результат заключается в обеспечении защиты воздушного пространства защищаемого объекта. Технический результат достигается за счет способа обнаружения и противодействия от неизвестных беспилотных летательных аппаратов (БПЛА), при этом способ включает этапы, на которых: а) производят с помощью средства первичного обнаружения, включающего лидар, обнаружение неизвестного летательного объекта в контролируемой зоне воздушного пространства; б) определяют с помощью средства первичного обнаружения, включающего лидар, пространственные координаты обнаруженного неизвестного летательного объекта, которые отправляют средству управления и классификации; в) производят захват обнаруженного неизвестного летательного объекта с помощью средства распознавания, содержащего по крайней мере одну видеокамеру; г) классифицируют с помощью средства управления и классификации обнаруженный неизвестный летательный объект на основе анализа по крайней мере одного изображения, полученного от средства распознавания, при этом указанный анализ производят при помощи нейронных сетей; д) при определении с помощью средства управления и классификации неизвестного летательного объекта как БПЛА производят опознавание БПЛА; е) при определении БПЛА как неизвестного БПЛА производят направленное радиоподавление сигнала управления БПЛА с помощью средства нейтрализации до тех пор, пока БПЛА не покинет контролируемую зону воздушного пространства. 2 н. и 7 з.п. ф-лы, 7 ил.
Комментарии