Системы и способы ослабления влияния ветровых турбин на радар - RU2457359C2
Код документа: RU2457359C2
Чертежи


Описание
I. Родственная заявка
Настоящее изобретение испрашивает приоритет на основании первоначальной заявки №61/006979 на патент США, поданной 8 февраля 2008 г., включенной в данный документ путем ссылки.
II. Область техники, к которой относится изобретение
Настоящее изобретение относится к ослаблению влияния ветровых турбин на радар и, в частности, к системам и способам ослабления влияния ветровых турбин на радар в результате изменения режима работы ветровых турбин на основе данных о режиме работы радара.
III. Предпосылки создания изобретения
В последние годы наблюдается увеличение потребляемого количества энергии ветра при относительном снижении поставок и росте цен ископаемого топлива. Все это привело к увеличению как размеров, так и числа ветродвигателей или "ветровых турбин". В некоторых географических районах в радиусе нескольких миль от критически важных радарных систем, таких как радарные системы служб управления движением воздушных судов коммерческого и военного назначения, были установлены фермы современных ветровых турбин. Эти "ветровые фермы" оказывают все более неблагоприятное влияние на рабочие характеристики близкорасположенных радарных систем.
Прежде всего каждая из этих современных ветровых турбин вследствие своей высокой мачты и лопастей большой площади зачастую имеет относительно большое радарное поперечное сечение (RCS). Например, многие современные ветровые турбины имеют в своей конструкции три 25-75-метровые лопасти, установленные на мачте высотой 80-120 м. Некоторые из этих ветровых турбин имеют расчетное RCS, составляющее приблизительно 40-50 дБм2. Такое RCS может вызывать помехи, снижающие чувствительность радарной системы. Кроме того, высокие мачты обеспечивают размещение этих лопастей турбины большой площади в пределах досягаемости более быстродвижущихся воздушных потоков, что делает их более видимыми для окружающих радарных систем.
Во-вторых, окружная скорость лопастей ветровой турбины также увеличилась и на концах лопастей иногда приближается к скоростям, в общем соответствующим скоростям самолетов (например, приблизительно 200 м/с). Поэтому каждая вращающаяся лопасть ветровой турбины может вызывать доплеровское отражение, воспринимаемое радарной системой как движущаяся цель, представляющая интерес. Во многих случаях быстро вращающиеся лопасти ветровой турбины обусловливают генерацию радарными системами ложных сообщений о цели.
В условиях эксплуатации радаров в гражданской и военной авиации для распознавания истинных воздушных целей и второстепенных радарных помех используют различные методы. Например, в наземных радарных системах используются фильтры обнаружения движущихся целей (MTD), позволяющие исключать из обзора отраженные радарные цели со скоростями ниже заданного порогового значения. Такие фильтры, в общем, эффективны для предотвращения появления на экранах радаров медленно движущихся и стационарных целей. Однако отличать некоторые движущиеся цели, такие как современные ветровые турбины, от радарных сигнатур самолетов с помощью только традиционной обработки радарной информации и методов фильтрации чрезвычайно трудно. В частности, поскольку каждая ветровая турбина имеет номинальную эффективную скорость на роторе, то каждая лопасть, вращающаяся вокруг ротора, характеризуется большим диапазоном определимых скоростей между практически нулевой (вблизи ротора) и скоростями, возрастающими от ротора в радиально внешнем направлении до максимальной скорости на конце лопасти. Соответствующий диапазон частот доплеровского отражения, вызываемого лопастью, может обусловить неэффективность фильтров MTD.
Следовательно, для ослабления влияния вращения ветровых турбин на самолетные радарные системы необходимо было использовать различные альтернативные подходы. Например, были предприняты попытки уменьшения высоты мачт или удаления ветровых турбин от радарных систем, в общем, в ущерб выходной мощности турбин. Большинство других методов включает в себя изменение геометрии ветровых турбин или замену используемых материалов, регулирование положения линии прямой видимости радаров или реализацию сложных способов обработки радарной информации. К сожалению, эти способы являются зачастую дорогостоящими, затруднительными в реализации и неэффективными. Более того, многие существующие радарные системы не приспособлены к усовершенствованию процесса ослабления влияния ветровых турбин. В результате некоторые радарные системы просто блокируют или "маскируют" участки над известными фермами ветровых турбин. Это метод не гарантирует нормальной точности радара и не позволяет осуществлять слежение за самолетом над ветровыми фермами.
Следовательно, возникает необходимость в создании усовершенствованных методов ослабления влияния ветровых турбин на радарные системы.
Системы и способы, являющиеся объектами настоящего изобретения, позволяют решить одну или более из проблем, сформулированных выше.
IV. Краткое изложение сущности изобретения
В соответствии с одним рассматриваемым типичным примером осуществления раскрыта система управления для ослабления влияния ветровой турбины на радарную систему. Система управления включает в себя: датчик, выполненный с возможностью определения данных о режиме работы радарной системы; процессор, выполненный с возможностью приема данных о режиме работы ветровой турбины и определения последовательности изменения режима вращения на основе данных о режиме работы радарной системы и о режиме работы ветровой турбины; и контроллер, выполненный с возможностью обеспечения применения последовательности изменения режима вращения к ветровой турбине.
В другом рассматриваемом примере осуществления раскрыт способ ослабления влияния ветровой турбины на радарную систему. Способ включает в себя этапы: определения данных о режиме работы радарной системы с помощью датчика; приема данных о режиме работы ветровой турбины; и изменения режима работы ветровой турбины на основе данных о режиме работы радарной системы и о режиме работы ветровой турбины.
В еще одном рассматриваемом примере осуществления раскрыт способ ослабления влияния ветровой турбины на радарную систему. Способ включает в себя этапы: определения данных о режиме работы радарной системы с помощью датчика; определения данных о текущем режиме работы ветровой турбины; вычисления данных о новом режиме работы ветровой турбины на основе данных о режиме работы радарной системы и о текущем режиме работы ветровой турбины; и изменения режима работы ветровой турбины на основе сравнения данных о текущем режиме работы ветровой турбины и о новом режиме работы ветровой турбины.
При этом перед подробным описанием, по меньшей мере, одного примера осуществления изобретения следует указать на то, при использовании изобретение не ограничивается деталями конструкции и расположением компонентов, предлагаемыми в приводимом ниже описании или иллюстрированными чертежами. В дополнение к описываемым способам изобретение может быть реализовано на практике и другими способами. Кроме того, следует иметь в виду то, что фразеология и терминология, используемые в данном документе, так же как и реферат, носят исключительно иллюстративный характер и не должны расцениваться как ограничивающие объем изобретения.
Прилагаемые чертежи, включенные в данное писание и составляющие его часть, иллюстрируют некоторые примеры осуществления изобретения и вместе с описанием служат для объяснения принципов изобретения.
Специалистам в данной области техники должно быть очевидно, что концепция, на которой базируется это изобретение, может без труда быть использована в качестве основы при проектировании другие структур, способов и систем для реализации некоторых целей настоящего изобретения. Поэтому важно признать, что формула изобретения должна расцениваться как включающая в себя такие эквивалентные конструкции, не выходящие за пределы существа и объема изобретения.
V. Краткое описание чертежей
На фиг.1 представлен схематический вид типичной фермы ветровых турбин и радарной системы.
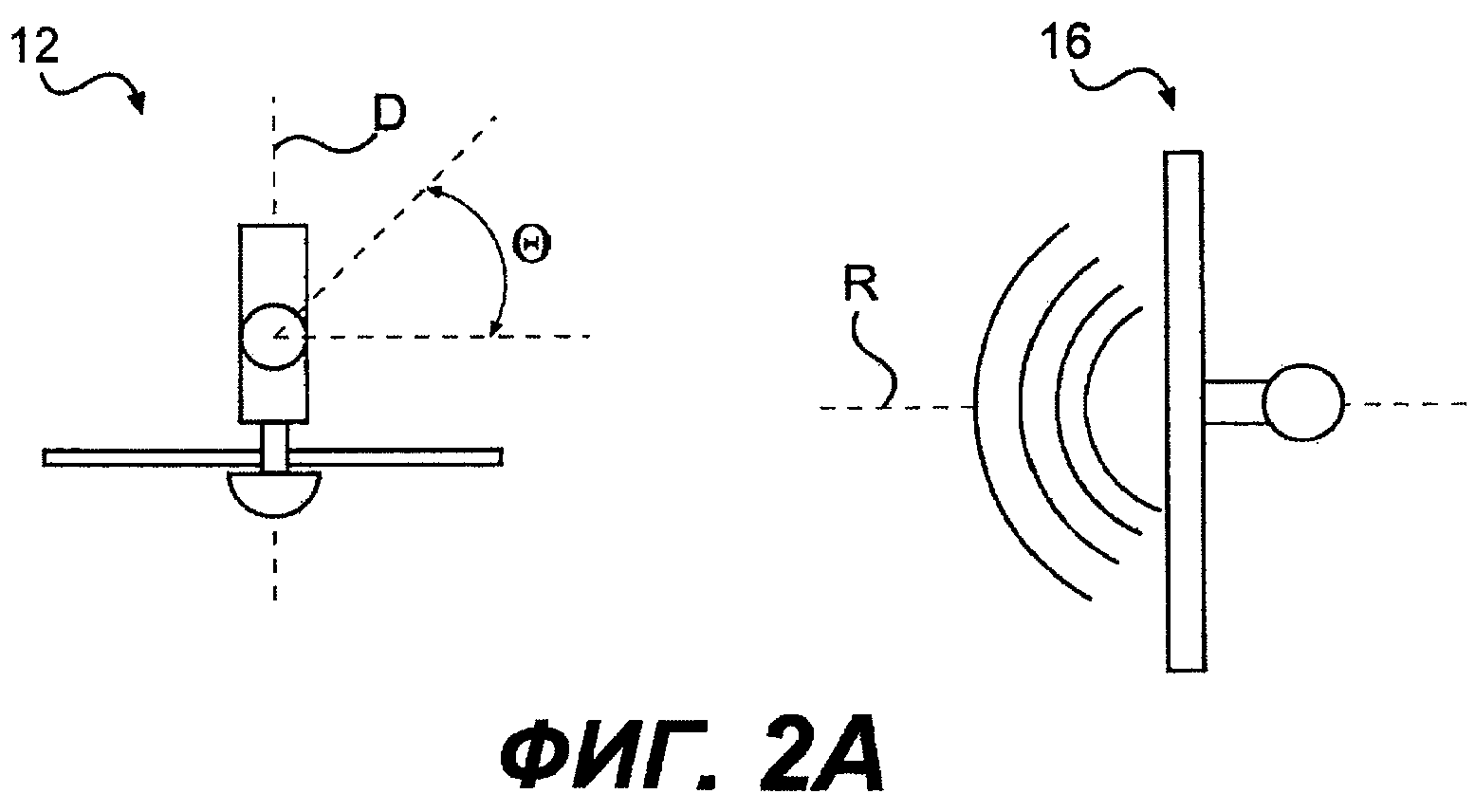
На фиг.2А представлен вид сверху типичной ветровой турбины и радарной системы.
На фиг.2В представлен вид сбоку типичной ветровой турбины и радарной системы.
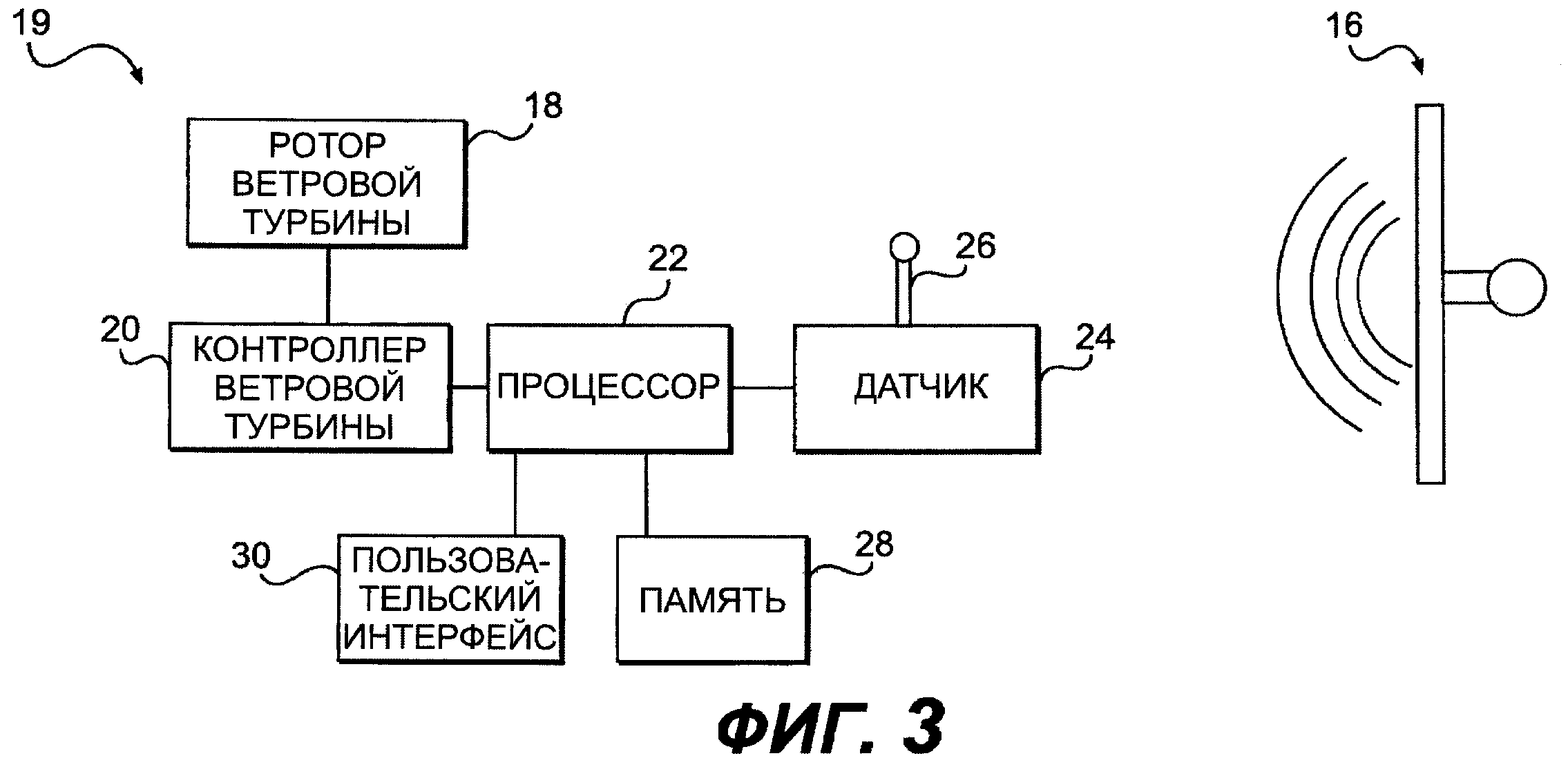
Фиг.3 иллюстрирует типичный пример осуществления системы для ослабления влияния вращения ветровой турбины на радарную систему.
Фиг.4 иллюстрирует типичный пример осуществления способа ослабления влияния вращения ветровой турбины на радарную систему.
VI. Подробное описание чертежей
Далее следует подробное описание некоторых примеров осуществления настоящего изобретения, сопровождаемое ссылками на прилагаемые чертежи.
На фиг.1 представлена часть типичной фермы 10 ветровых турбин и типичной радарной системы 16. Ферма 10 ветровых турбин может включать в себя большое число ветровых турбин 12, предназначенных для преобразования кинетической энергии ветра в полезную электрическую мощность. Каждая ветровая турбина 12 может включать в себя большое число лопастей 14, выполненных с возможностью вращения в вертикальной плоскости вокруг горизонтальной оси или ротора 18. В одном типичном примере осуществления изобретения ветровая турбина 12 может быть выполнена с возможностью вращения вокруг вертикальной оси, при котором лопасти 14 могут вращаться в любой плоскости вращения, определяемой текущим ветровым режимом или контроллером. Точно так же скорость вращения лопастей ветровой турбины 12 может варьироваться в соответствии с текущим ветровым режимом или оставаться постоянной на уровне, при котором регулируемая скорость вращения лопастей составляет, как правило, 5-20 об/мин.
В одном типичном примере осуществления каждая ветровая турбина 12 может включать в себя три лопасти 14, причем каждая из этих трех лопастей отстоит на 120° от другой в плоскости вращения ветровой турбины. В этом примере осуществления в процессе вращения ветровой турбины 12, имеющей три лопасти 14, приблизительно каждые 0,5-2,0 с лопасть принимает определенную ориентацию. Очевидно, что настоящее изобретение может быть использовано применительно к ветровой турбине с горизонтальной осью любого типа, имеющей любое число лопастей.
Радарная система 16 может представлять собой радарную систему любого типа, негативное влияние на которую может оказывать вращательное движение ветровой турбины, установленной в пределах диапазона действия этой системы. Например, радарная система 16 может быть любой радарной системой коммерческого или военного назначения, используемой для управления воздушным движением, наблюдения за воздушным пространством или картографирования. В одном примере осуществления радарная система 16 может включать в себя приемопередающую радарную антенну 13 со скоростью вращения, составляющей приблизительно 12-15 об/мин, и шириной луча радара приблизительно 1°. Такой луч радара наводится на данную точку в пределах диапазона своего действия каждые 4-5 с, а длительность сигнала радара составляет приблизительно 15 мс. В соответствии с этим в одном типичном примере осуществления сигнал радара, генерируемый радарной системой 16, может направляться к каждой ветровой турбине 12 в пределах диапазона своего действия приблизительно в течение 15 мс каждые 4-5 с. Во время этих относительно коротких периодов времени ориентация лопастей ветровой турбины 12 может обусловливать ее негативное влияние на работу радарной системы 16.
На фиг.2А представлен вид сверху типичной ветровой турбины 12 и радарной системы 16. Изображенная ветровая турбина 12 имеет ось D ротора, вокруг которой вращаются лопасти ветровой турбины 12. Радарная система 16 имеет ось R радара, определяющую направление его вращения или, иначе, направление сканирования сигнала радара. В общем случае, когда ось D ротора и ось R радара перпендикулярны одна другой, как на фиг.2А, ветровая турбина 12 может восприниматься радарной системой 16 в качестве чрезвычайно широкополосного доплеровского отражателя. В случае же, когда ось D ротора и ось R радара параллельны одна другой, лопасть ветровой турбины 12 может характеризоваться доплеровским отражением только с нулевой частотой и, следовательно, не создает никаких ложных целей. В случае когда ось D ротора и ось R радара не располагаются ни параллельно, ни перпендикулярно одна другой, ветровая турбина 12 все же может создавать в значительном диапазоне частот доплеровское отражение, воспринимаемое радарной системой 16, что может снижать способность радарной системы 16 к обнаружению самолетов. Поэтому при любой взаимной ориентации оси D ротора и оси R радара, кроме параллельной, по меньшей мере, на некоторых участках движения лопастей в направлениях приближения и удаления от радарной системы 16 ветровая турбина может вызывать неустойчивое отражение, которое невозможно устранить в результате стандартной обработки радарной информации.
В случае когда ось D ротора и ось R радара не являются параллельными одна другой, исключительно вредное отражение может возникать при перпендикулярном положении поверхности лопасти по отношению к радиальной линии между ветровой турбиной 12 и радарной системой 16. При одной и той же высоте ветровой турбины 12 и радарной системы 16 это условие, как правило, наступает, когда лопасть располагается перпендикулярно поверхности Земли. Однако при различных высотах ветровой турбины 12 и радарной системы 16 это условие может наступать и не при строго перпендикулярной ориентации к поверхности Земли. Например, вдоль любой оси в плоскости вращения лопастей, перпендикулярной к радиальной линии между ветровой турбиной 12 и радарной системой 16. Кроме того, в случае изогнутости лопасти ветровой турбины 12 возможно существование диапазона ориентации лопасти, при которых участок поверхности лопасти занимает нежелательное перпендикулярное положение по отношению к радиальной линии между ветровой турбиной 12 и радарной системой 16.
На фиг.2В представлены типичная ветровая турбина 12, имеющая относительно прямые лопасти 14, и типичная радарная система 16, установленная на той же высоте (расстояние между ними показано не в масштабе). В этом примере, когда лопасть 14 ориентирована вдоль вертикальной оси V (т.е. перпендикулярно к радиальной линии к радару), как лопасть 15, изображенная на фиг.2В, ветровая турбина 12 может вызывать значительное нежелательное доплеровское отражение, воспринимаемое радарной системой 16. Таким образом, при повороте каждой лопасти 14 ветровой турбины 12 в плоскости вращения на угол α происходит ее совмещение с вертикальной осью V, причем дважды за полный оборот. В случае типичной ветровой турбины с тремя лопастями 12 это нежелательное условие может наступать шесть раз за один полный оборот.
Точно так же на фиг.1 представлена ветровая турбина 12, имеющая лопасть 15, направленную прямо вверх (т.е. перпендикулярно к поверхности Земли), а также ветровая турбина 12, имеющая лопасть 17, направленную прямо вниз (также перпендикулярно к поверхности Земли). Каждое из этих двух показанных положений лопастей может быть исключительно вредным для работы близкорасположенной радарной системы 16, установленной на той же высоте, если наступает во время сканирования радара (т.е. когда сигнал радара направлен в сторону ветровой турбины), при взаимно непараллельных оси D ротора и оси R радара.
В этом примере каждый раз, когда лопасть 14 находится в одном из двух нежелательных "вертикальных" положений, конец лопасти может иметь максимальную горизонтальную составляющую скорости, обнаруживаемую радарной системой. Другими словами, при ориентации вращающейся лопасти в «12-часовом» и «6-часовом» положениях (в отличие от ее «3-часового» и «9-часового» положений) концевой участок лопасти может восприниматься радарной системой 16 как объект, движущийся над поверхностью Земли с большой скоростью. Кроме того, при «12-часовой» и «6-часовой» ориентациях лопасти может наблюдаться чрезвычайное увеличение радарного поперечного сечения лопасти в направлении радара, что может вызывать появление на экране радара помех, проявляющихся в виде вспышек. Поэтому неустойчивое яркое отражение, возникающее при этих ориентациях, может являться наиболее частой причиной генерации ложных самолетных целей. Следовательно, эффективным средством может стать предотвращение перпендикулярной ориентации любой из лопастей ветровой турбины 12 к сигналу радара в течение этих приблизительно 15 мс, во время которых близкорасположенная радарная система 16 направлена в ее сторону.
В одном примере осуществления настоящего изобретения для предотвращения нежелательной ориентации лопастей 14 во время сканирования радара каждая ветровая турбина 12 может быть снабжена своей собственной системой управления. В варианте изобретения для ослабления влияния вращения большого числа ветровых турбин 12 фермы 10 ветровых турбин на близкорасположенную радарную систему 16 эти ветровые турбины 12 могут быть подключены к общей системе управления.
Фиг.3 иллюстрирует пример осуществления, в котором система 19 управления может быть соединена с контроллером 20 каждой ветровой турбины. В общем случае контроллер 20 ветровой турбины может быть аппаратно и/или программно реализованным контроллером любого существующего типа, обеспечивающим возможность управления работой ветровой турбины. Как показано на фиг.3, контроллер 20 ветровой турбины может быть выполнен с возможностью управления ротором 18 ветровой турбины, например, путем приложения вращающего момента к ротору. Например, контроллер 20 ветровой турбины может быть тормозом, таким как рекуперативный тормоз, или электродвигателем, выполненным с возможностью ускорения или замедления вращения ротора ветровой турбины 18. Таким образом, контроллер 20 ветровой турбины может быть любым механизмом, выполненным с возможностью приложения вращающего момента к ротору 18 ветровой турбины.
В другом примере осуществления контроллер 20 ветровой турбины может быть выполнен с возможностью обеспечения поворота мачты и/или ротора 18 ветровой турбины вокруг вертикальной оси на угол θ, показанный на фиг.2А, для изменения ориентации плоскости вращения лопастей 14 относительно Земли. Таким образом, контроллер 20 ветровой турбины может быть выполнен с возможностью обеспечения изменения угла восприятия доплеровского отражения, создаваемого вращающимися лопастями 14, близкорасположенной радарной системой 16. В еще одном примере осуществления контроллер 20 ветровой турбины может быть выполнен с возможностью коррекции угла наклона лопастей 14 ветровой турбины 12, например угла β, показанного на фиг.2В. Изменение угла наклона лопастей 14 позволяет изменять их угловую скорость, определяемую ветром. Таким образом, в каждом примере осуществления контроллер 20 ветровой турбины может быть выполнен с возможностью прямого или косвенного изменения углового положения и/или скорости лопастей 14 в любой момент времени.
Для ослабления влияния вращения ветровой турбины 12 на близкорасположенную радарную систему 16 система 19 управления может включать в себя датчик 24 и процессор 22, обменивающийся сигналами с контроллером 20 каждой ветровой турбины 12.
Датчик 24 может быть выполнен с возможностью определения режима работы радарной системы 16. Датчик 24 может быть установлен где-нибудь вблизи существующей ветровой турбины 12. В варианте изобретения датчик 24 может быть установлен на мачте, обтекателе или на любом другом компоненте соответствующей ветровой турбины 12 в процессе или после ее сборки. В одном примере осуществления датчик 24 может быть РЧ датчиком, имеющим антенну 26 для обнаружения электромагнитных волн, передаваемых радарной системой 16. Датчик 24 может быть также выполнен с возможностью обмена сигналами с процессором 22, осуществляемого на основе обнаруженных электромагнитных волн. Датчик 24 может включать в себя или обмениваться сигналами с аналого-цифровым преобразователем. В одном примере осуществления датчик 24 может определять скорость сканирования и/или ширину луча радарной системы 16. В варианте примера осуществления датчик 24 может просто передавать данные сигнала радара в процессор 22, а процессор 22 может быть выполнен с возможностью вычисления скорости сканирования радарной системы 16 на основе сигнала радара, принимаемого от датчика 24. Процессор 22 может быть также выполнен с возможностью вычисления ширины луча радарной системы 16, осуществляемого на основе сигнала радара, принимаемого от датчика 24.
Процессор 22 может быть процессором любого соответствующего типа и может быть выполнен с возможностью приема оперативной информации от контроллера 20 ветровой турбины в дополнение к данным сигнала радара от датчика 24. Процессор 22 может быть также выполнен с возможностью выполнения вычислений на основе оперативной информации о работе турбины и данных сигнала радара. Функции процессора 22 могут быть реализованы отдельным специализированным процессором или несколькими процессорами. Кроме того, процессор 22 может включать в себя, без ограничений, аппаратные средства процессора цифрового сигнала (DSP) или любые другие аппаратные средства с возможностью исполнения программного обеспечения.
Кроме того, помимо датчика 24 и контроллера 20 ветровой турбины процессор 22 может дополнительно обмениваться сигналами с памятью 28 и пользовательским интерфейсом 30.
Память 28 может быть выполнена с возможностью хранения постоянных параметров, относящихся к ветровой турбине 12 и радарной системе 16. Например, память 28 может хранить спецификации, определяющие физические характеристики ветровой турбины 12 и радарной системы 16, а также эксплуатационные переменные, определяемые пользователем. Память 28 может быть также выполнена с возможностью хранения команд вычислений, доступных процессору 22. Память 28 может быть памятью любого типа, такой как магнитная память, полупроводниковая память, память на оптических дисках и/или память на магнитооптических дисках.
Пользовательский интерфейс 30 может обеспечивать оператору ветровой турбины или радарной системы возможность подачи входных сигналов в процессор 22 и/или память 28. Например, оператор может усовершенствовать режим работы процессора 22 путем сохранения новых команд процессора в памяти 28. Оператор может также использовать пользовательский интерфейс 30 для ввода постоянных параметров, соответствующих определенной ветровой турбине и/или радарной системе. В одном примере осуществления пользовательский интерфейс 30 может представлять собой локальный или удаленный сетевой компьютер.
Фиг.4 является иллюстрацией типичного способа ослабления влияния вращения ветровой турбины на радарную систему. Типичный способ может включать в себя начальный этап, заключающийся в приеме данных сигнала радара от соседней радарной системы (этап 40). Например, как показано на фиг.3, датчик 24 может определять данные сигнала радара, передаваемые радарной системой 16. При этом датчик 24 может обмениваться данными сигнала радара и/или вычисленными скоростью сканирования радара и шириной луча с процессором 22 и/или памятью 28. В ином варианте изобретения процессор 22 может определять скорость сканирования радара и ширину луча на основе данных сигнала, принимаемых от датчика 24 (этап 41).
Способ может дополнительно включать в себя прием данных об угловом положении и скорости лопастей 14 ветровой турбины 12 (этап 42). Например, на основе данных различных рабочих датчиков турбины, подключенных к контроллеру 20 турбины, контроллер 20 ветровой турбины может определять угловое положение и скорость лопастей 14 ветровой турбины как функцию времени. В одном примере осуществления к контроллеру 20 ветровой турбины может быть подключен рабочий датчик турбины, такой как оптический или магнитный датчик углового положения, установленный на роторе 18 ветровой турбины 12. Контроллер 20 ветровой турбины может обмениваться данными об угловом положении и скорости лопастей в зависимости от времени с процессором 22.
Способ может дополнительно включать в себя вычисление последовательности изменения режима вращения на основе скорости сканирования радара, ширины луча радара, углового положения и скорости лопастей турбины (этап 44). Вычисление последовательности изменения режима вращения может быть также осуществлено на основе входных постоянных, определяющих физические характеристики ветровой турбины 12 и/или радарной системы 16. Например, параметры ускорения или замедления лопастей 14 могут рассматриваться в качестве функции их известных масс. Точно так же силы сопротивления на лопастях 14 можно рассматривать в качестве функции их известных аэродинамических конфигураций, угловой скорости и/или текущего ветрового режима.
Последовательность изменения режима вращения может быть любым рядом команд, реализуемых контроллером 20 ветровой турбины для ослабления влияния вращения ветровой турбины 12 на радарную систему 16. В частности, последовательность изменения режима вращения может быть вычислена процессором 22 и реализована контроллером 20 ветровой турбины для предотвращения нежелательной ориентации лопастей 14 ветровой турбины 12 во время сканирования радара (как описывается выше).
Например, последовательность изменения режима вращения может включать в себя предназначенные для контроллера 20 ветровой турбины команды на торможение, обеспечивающие приложение тормозящего момента к ротору ветровой турбины 18. В варианте изобретения последовательность изменения режима вращения может включать в себя предназначенные для контроллера 20 ветровой турбины команды на привод, обеспечивающие приложение крутящего момента привода к ротору ветровой турбины 18. В другом примере осуществления последовательность изменения режима вращения может включать в себя команды, обеспечивающие вращение мачты или ротора 18 вокруг вертикальной оси и, таким образом, изменение ориентации плоскости вращения лопастей 14. В еще одном примере осуществления последовательность изменения режима вращения может включать в себя команды, обеспечивающие регулирование угла наклона лопастей 14. Избирательное регулирование тормозящего момента, крутящего момента привода, ориентации плоскости вращения и/или угла наклона лопастей может обеспечивать изменение угловой скорости лопастей для предотвращения размещения лопастей в вертикальном положении во время сканирования радара.
В одном примере осуществления каждая последовательность изменения режима вращения должна обеспечивать только изменение режима вращения лопастей, достаточное для обеспечения невертикальной ориентации лопастей во время следующего ожидаемого сканирования радара. Это могут быть вычисленные в результате первой оценкой время и продолжительность следующего ожидаемого сканирования радара в качестве функции последнего сканирования радара (определенного датчиком 24) и/или новейшая история сканирований радара. Затем ожидаемый режим лопастей во время следующего сканирования может быть вычислен в качестве функции последних найденных углового положения и скорости лопастей ветровой турбины 14. Поскольку общий порядок величины скорости сканирования радара является таким же, как и угловая скорость лопастей ветровой турбины 14, то для предотвращения сканирования радаром вертикальной лопасти может потребоваться не более 1/12 углового положения или изменения скорости. В дополнение к этому ожидаемый режим вращения лопастей может быть определен как приемлемый для следующих нескольких операций сканирования, но при этом неприемлемый для некоторых будущих операций сканирования. Вращение лопастей может быть изменено с целью увеличения числа операций сканирования, для которых режим вращения лопастей будет приемлемым. Преимущество этого может заключаться в обеспечении возможности меньшего изменения режима вращения лопастей по сравнению с изменением только для следующего сканирования.
Наконец, способ может включать в себя применение найденной заданной последовательности изменения режима вращения (этап 46). Например, в условиях последовательности изменения вращения, вычисленной процессором 22, в контроллер 20 ветровой турбины могут поступать команды на коррекцию работы ветровой турбины 12 любым способом (таким, как типичные способы, описываемые выше). Таким образом, последовательность изменения вращения может быть реализована для периодического ускорения или замедления вращения лопастей с целью предотвращения вертикальной ориентации лопастей 14 во время сканирования радара.
Специалистам в данной области техники очевидно, что последовательность изменения режима вращения может быть вычислена, по меньшей мере, однократно во время каждого полного оборота лопастей 14. В варианте изобретения для предотвращения сканирования радаром вертикально ориентированной лопасти может быть достаточной однократная реализация последовательности изменения режима вращения во время каждых нескольких оборотов. Кроме того, вычисление последовательности изменения режима вращения может указывать на отсутствие необходимости в каком-либо изменении и, следовательно, на отсутствие необходимости коррекции работы ветровой турбины 12.
Большинство признаков и преимуществ изобретения очевидны из подробного описания изобретения, и, таким образом, следует понимать, что прилагаемая формула изобретения охватывает все такие признаки и преимущества изобретения, не выходящие за пределы существа и объема изобретения. Кроме того, специалистам в данной области техники очевидна возможность внесения различных изменений и дополнений в описание изобретения. Поэтому изобретение не ограничивается рассмотренными и проиллюстрированными примерами осуществления, и в него, следовательно, могут быть включены все соответствующие модификации и эквиваленты в пределах объема изобретения.
Реферат
Изобретение относится к системам и способам для ослабления влияния ветровых турбин на расположенную вблизи радарную систему. Система управления включает в себя датчик, выполненный с возможностью определения данных о режиме работы радарной системы, процессор, выполненный с возможностью приема данных о режиме работы ветровой турбины и определения последовательности изменения режима вращения ветровой турбины на основе данных о режиме работы радарной системы и о режиме работы ветровой турбины, и контроллер, выполненный с возможностью обеспечения использования последовательности изменения режима вращения применительно к ветровой турбине. Способ ослабления влияния ветровой турбины на радарную систему заключается в определении данных о режиме работы радарной системы с помощью датчика, приеме данных о режиме работы ветровой турбины и изменении режима работы ветровой турбины на основе данных о режиме работы радарной системы и о режиме работы ветровой турбины. Изобретения позволяют ослабить помехи, возникающие при функционировании радаров гражданской и военной авиации, расположенных вблизи ветровых турбин. 3 н. и 17 з.п. ф-лы, 5 ил.
Комментарии