Повторная калибровка предварительно записанных изображений во время вмешательства с использованием игольчатого устройства - RU2535605C2
Код документа: RU2535605C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к интервенционной системе, включающей в себя устройство формирования изображения и игольчатое устройство. Также, изобретение относится к способу объединения предварительно записанных изображений с прямыми изображениями интересующего объекта. В частности, изобретение относится к системе и способу, обеспечивающим повторную калибровку наложения предварительно записанных изображений и прямых изображений друг на друга.
Уровень техники
Во время вмешательства, врач, осуществляющий вмешательство, использует предварительно записанные изображения и отображение прямого изображения для направления медицинского устройства, такого как игла, в намеченное местоположение. До вмешательства получают детальное изображение организма. Это изображение чаще всего представляет собой трехмерное изображение. Систему координат этого трехмерного изображения соединяют с местоположением стола и/или медицинского оборудования формирования изображения, используемого во время вмешательства. Таким образом, осуществляют наложение прямых изображений, полученных во время вмешательства и предварительно записанного изображения друг на друга. Точность наложения явно зависит от точности системы координат и, например, точности положения стола и оборудования формирования прямого изображения. Более того, точность наложения также зависит от движения пациента, например, при дыхании. Для некоторых вмешательств, таких как, например, биопсия небольших глубоко расположенных повреждений, точность наложения недостаточна.
Сущность изобретения
Задачей изобретения является предоставление интервенционной системы и способа объединения изображений, где точность наложения изображений возрастает.
В основном, это достигается посредством использования информации о местной ткани. Подобная информация может быть предоставлена посредством, так называемой, фотонной иглы, т.е. посредством игольчатого устройства, содержащего оптическое волокно. Оптическое волокно может представлять собой датчик, посредством которого игольчатое устройство может обнаруживать признаки ткани. Такие признаки также могут быть обнаружены на изображениях, подлежащих объединению.
Таким образом, существенным признаком изобретения является то, что информацию от датчика игольчатого устройства объединяют с информацией, предоставленной посредством прямого и предварительно записанных изображений для увеличения точности наложения предварительно записанного и прямого изображений друг на друга, посредством повторной калибровки системы координат предварительного записанного изображения с системой координат прямого изображения, используя признаки, выявленные датчиком игольчатого устройства, причем эти признаки присутствуют на предварительно записанных изображениях и в большей или меньшей мере представлены на прямых изображениях.
Для выполнения совмещения наложением идентифицируют систему координат или ориентир на каждом из накладываемых изображений. В некоторых случаях прямое изображение не показывает все детали предварительно записанного изображения. В этом случае, датчик игольчатого устройства, положение которого может быть обнаружено на прямом изображении, обеспечивает дополнительную информацию о ткани в местоположении датчика. Эту дополнительную информацию используют для предоставления более точной идентификации системы координат или ориентира на прямом изображении, причем эту систему координат или ориентир также можно идентифицировать на предварительно записанном изображении так, чтобы посредством системы согласно изобретению увеличить точность наложения.
Другими словами, исходя из конкретного типа ткани, распознанного посредством иглы в определенный момент, и зная приблизительно ее положение, можно точно обнаружить объем анализируемой ткани в системе координат предварительно записанного, т.е. предоперационного изображения, так как информация о ткани также доступна из предварительно записанного изображения. Исходя из пространственного соотношения между этим объемом ткани и иглой, и зная положение иглы на прямых изображениях, также можно определить положение этого объема ткани по отношению к системе координат прямых изображений. Таким образом, поскольку местоположение ткани известно в системе координат предварительно записанного изображения и в системе координат прямых изображений, можно выполнять повторную калибровку совмещения наложением.
Вышеупомянутая задача решена посредством объекта соответствующих независимых пунктов формулы изобретения. Также описаны примеры вариантов осуществления в соответствующих зависимых пунктах формулы изобретения.
В целом, интервенционная система согласно изобретению включает в себя устройство формирования изображения, обеспечивающее изображения объекта, игольчатое устройство и обрабатывающее устройство. Игольчатое устройство включает в себя датчик для обеспечения данных, соответствующих свойствам ткани. Обрабатывающее устройство выполнено с возможностью совмещения наложением друг на друга предварительно записанных изображений и прямых изображений, предоставленных устройством формирования изображения, с использованием данных от датчика.
Согласно другому варианту осуществления, интервенционная система может дополнительно содержать анализирующее устройство, причем анализирующее устройство соединено с датчиком и выполнено с возможностью обработки данных от датчика, таким образом, генерируя информацию о свойствах ткани.
Датчик игольчатого устройства включает в себя оптическое волокно, выполненное с возможностью излучать и принимать свет. Анализирующее устройство включает в себя консоль для спектроскопии, причем консоль и оптическое волокно соединены друг с другом.
Консоль для спектроскопии выполнена с возможностью предоставления информации от одного вида спектроскопии из группы, состоящей из отражательной спектроскопии, флуоресцентной спектроскопии, аутофлуоресцентной спектроскопии, спектроскопии при различной длине траектории, спектроскопии комбинационного рассеяния света, оптической когерентной томографии и мультифотонной флуоресцентной спектроскопии.
Кроме того, датчик игольчатого устройства включает в себя элементы с возможностью формирования микроскопического изображения. Такие элементы могут включать оптическое волокно, пучок оптических волокон, линзу и средство активации. Средство активации может перемещать оптическое(ие) волокно(а) вместе с линзой или может перемещать только оптическое(ие) волокно(а) или линзу. Также, возможность формирования изображений может быть реализована при помощи только пучка волокон и линзы, без средства активации. С такой возможностью формирования изображений можно формировать микроскопические изображения ткани перед игольчатым устройством.
Согласно еще одному варианту осуществления, устройство формирования изображения является неинвазивным средством формирования изображения, принадлежащим к одному из группы, состоящей из рентгеновского устройства, компьютерного томографа, магнитно-резонансного томографа и ультразвукового устройства.
Следует отметить, что игольчатое устройство включает в себя структуру и материал, выполненные с возможностью визуализации посредством устройства формирования изображения.
Другими словами, интегрированная система согласно изобретению включает неинвазивное средство формирования изображения, выполненное с возможностью формировать изображение внутренней части организма; игольчатое устройство, содержащее датчик, включающий в себя по меньшей мере одно волокно, причем волокно соединено с консолью, выполненной с возможностью зондировать ткань впереди наконечника игольчатого устройства или вблизи него. Неинвазивное средство формирования изображения может формировать изображение игольчатого устройства внутри тела, обеспечивая предварительное наведение игольчатого устройства на основе неинвазивного средства формирования изображения. Оптическое средство применяют для уточнения положения части наконечника игольчатого устройства в ткани-мишени. Предпочтительно, оптическую информацию совмещают с изображением неинвазивного средства формирования изображения. Предпочтительно, в случае обеспечения неинвазивным средством формирования изображения трехмерного изображения, оптическую информацию совмещают с трехмерной системой координат изображения.
Следует отметить, что игольчатым устройством может быть, с одной стороны, игла для биопсии, канюля или троакар, или, с другой стороны, может также быть катетер, выполненный с возможностью вмещения иглы, посредством которой, например, непосредственно выполняют биопсию.
"Ткань", изучаемая системой, включает все виды живой или мертвой ткани, например ткани человека, в частности эпителиальную ткань (например, поверхность кожи, внутреннюю оболочку желудочно-кишечного тракта), соединительную ткань (например, кровь, костную ткань), мышечную ткань и нервную ткань (например, мозга, спинного мозга и периферической нервной системы). "Ткань" также может содержать пищевые продукты, биоматериалы, синтетические материалы, жидкие или вязкие вещества и т.д.
Согласно другому аспекту изобретения, способ объединения предварительно записанных изображений с прямыми изображениями интересующего объекта включает в себя этапы наложения предварительно записанных изображений и прямых изображений друг на друга, получения информации о местной ткани, повторной калибровки наложения изображений с использованием полученной информации о местной ткани.
Согласно одному варианту осуществления, способ может дополнительно содержать этапы приема предварительно записанных изображений из базы данных и приема прямых изображений от устройства формирования изображения. Информацию о местной ткани можно также получить посредством игольчатого устройства.
Согласно другому варианту осуществления, в способе этап наложения включает задание системы координат на предварительно записанном изображении и идентификацию соответствующей системы координат на прямом изображении или наоборот.
Согласно другому варианту осуществления, в способе этап повторной калибровки наложения может включать идентификацию структур на предварительно записанном изображении, соответствующих полученной информации.
Предварительно записанные изображения, прямые изображения и информация о местной ткани могут быть обработаны в режиме реального времени для вычисления ошибки в наложении.
Изобретение также относится к компьютерной программе для обрабатывающего устройства, при которой способ согласно изобретению исполняют соответствующей системой. Компьютерную программу предпочтительно загружают в рабочую память процессора данных. Процессор данных оснащают таким образом, чтобы выполнить способ согласно изобретению. Также, изобретение относится к машиночитаемому носителю, такому как CD-Rom, на котором хранится компьютерная программа. Однако компьютерная программа также может быть представлена в сети, такой как всемирная сеть и может быть загружена в рабочую память процессора данных из такой сети.
Следует отметить, что варианты осуществления изобретения описаны в отношении различных объектов изобретения. В частности, некоторые варианты осуществления описаны в отношении пунктов формулы изобретения, относящихся к способу, тогда как другие варианты осуществления описаны в отношении пунктов формулы изобретения, относящихся к устройству. Однако специалист в данной области техники сделает вывод из вышесказанного и последующего описания, что если не указано иначе, в дополнение к любой комбинации признаков, принадлежащих одному типу объекта изобретения, в настоящем описании считается раскрытой также любая комбинация признаков, относящихся к разным объектам изобретения.
Аспекты, описанные выше, а также дополнительные аспекты, признаки и преимущества настоящего изобретения могут также быть извлечены из примеров вариантов осуществления, описанных ниже, и объяснены со ссылкой на примеры вариантов осуществления. Далее изобретение будет описано более подробно со ссылкой на примеры вариантов осуществления, но настоящее изобретение не ограничено этими вариантами осуществления.
Краткое описание чертежей
На фигуре 1 представлено игольчатое устройство согласно изобретению, включающее сенсорные средства.
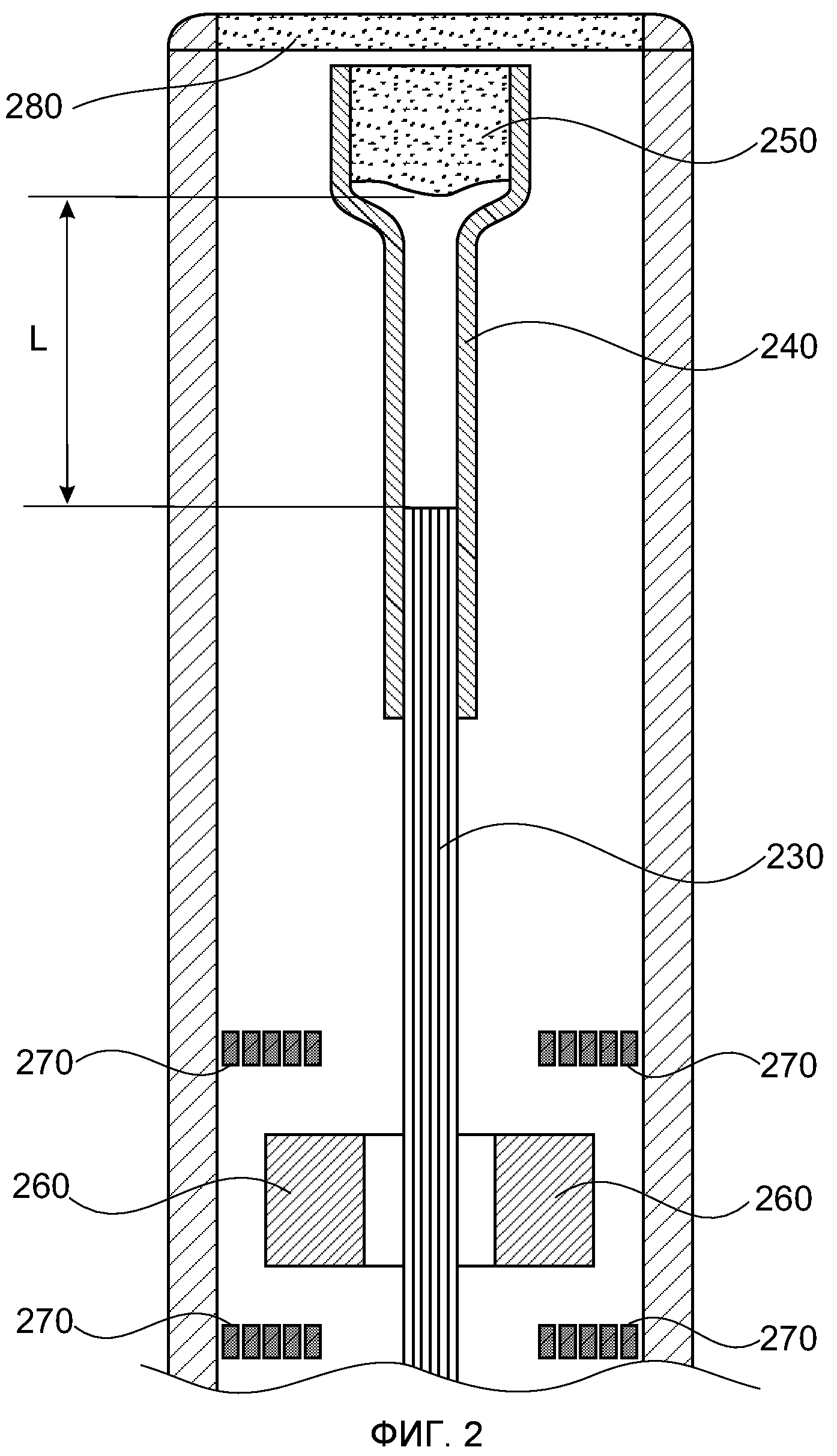
На фигуре 2 представлено детальное изображение части наконечника игольчатого устройства, включая систему линз датчика, согласно примеру варианта осуществления игольчатого устройства.
На фигуре 3 представлена интервенционная система согласно изобретению.
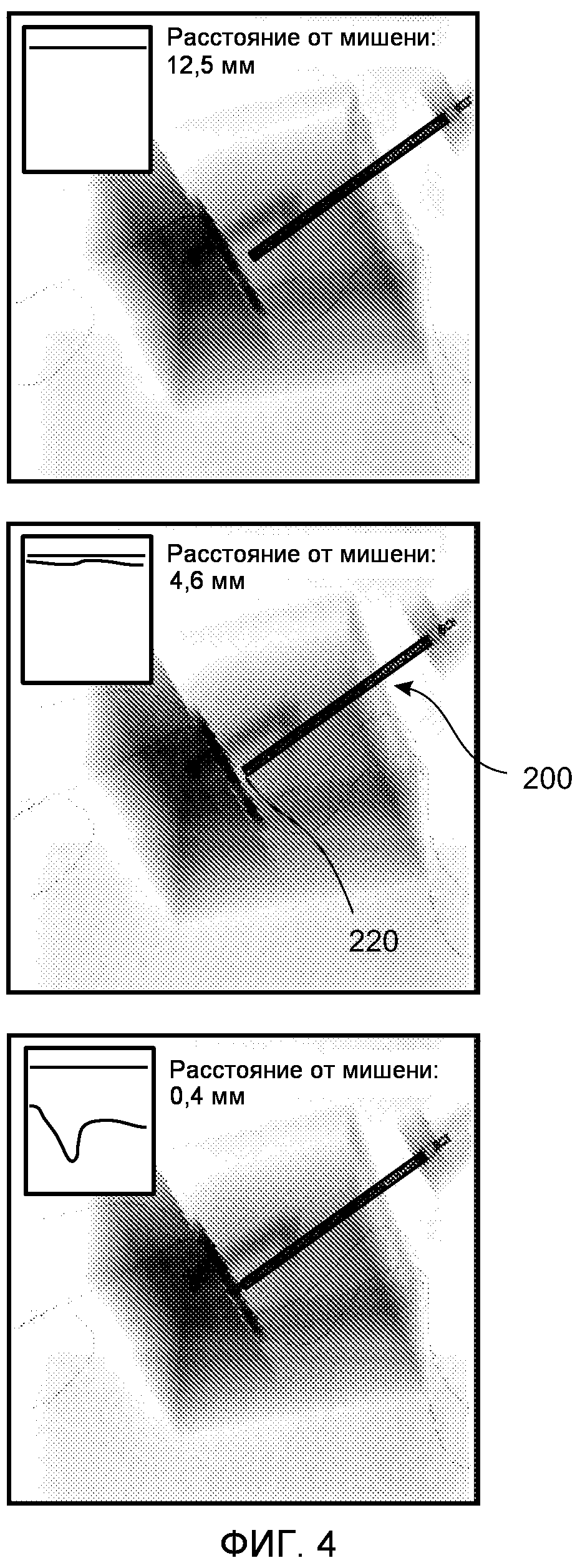
Фигура 4 демонстрирует примеры изображений, показывающих игольчатое устройство в объекте, где наконечник игольчатого устройства расположен на разном расстоянии от структуры-мишени.
Фигура 5 представляет собой первое изображение длин волн для нескольких спектров.
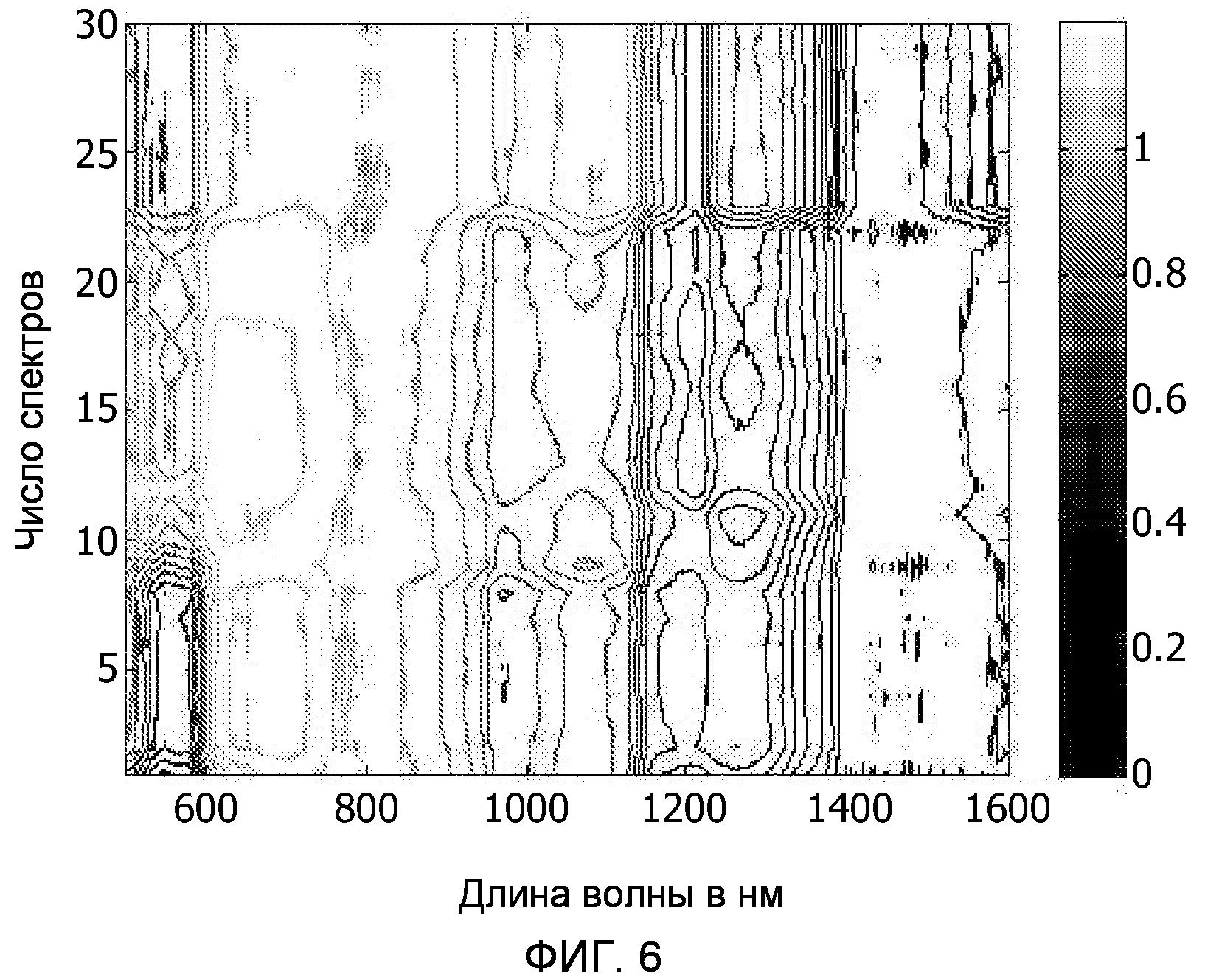
Фигура 6 представляет собой второе изображение длин волн для нескольких спектров.
Фигура 7 представляет собой изображение длин волн для трех иллюстративных спектров.
Фигура 8 представляет собой блок-схему последовательности операций способа согласно изобретению.
Изображения на чертежах схематичны и не приведены в масштабе. Следует заметить, что на разных фигурах, сходные элементы обозначены одинаковыми ссылочными позициями.
Подробное описание примеров вариантов осуществления
Как представлено на фигуре 1, игольчатое устройство 200, являющееся частью системы согласно одному варианту осуществления изобретения, включает в себя стержень 210, скос на части наконечника стержня, по меньшей мере, одно волокно 230 и удерживающую часть 290.
Например, стержень может иметь длину 150 мм и диаметр 1,3 мм. Также, скос может образовывать угол с осью стержня, составляющий 20°. Такие размеры позволяют видеть порядок величин и соотношения для иглы, предназначенной для исследования тканей на основе оптической спектроскопии.
В этом варианте осуществления волокно 230, проходящее от дистального конца, т.е. от поверхности скоса, через стержень 210 к удерживающей части 290, проходит через отверстие в удерживающей части 290 вне иглы.
Кроме того, на фигуре 1 схематично представлены элементы системы согласно изобретению. Система включает в себя игольчатое устройство 200, источник 110 света, приемник 120 света, обрабатывающий блок 620 и монитор 610. Обрабатывающий блок 620 выполнен с возможностью управления источником 110 света, чтобы испускать свет в волокно 230, таким образом, чтобы испускать свет через дистальный конец поверхности волокна 230 на вершине скоса в окружающую ткань.
В зависимости от вида ткани перед скосом, будет отражаться больше или меньше испускаемого света в направлении к основанию скоса, воспринимаемого другим волокном. Через указанное другое волокно свет достигает приемника 120 света, выполненного с возможностью преобразования света в электрические сигналы. Эти электрические сигналы будут переданы посредством, например, провода на обрабатывающий блок 620. Обрабатывающий блок обработает данные, соответствующие электрическим сигналам таким образом, чтобы обработанные данные были доступны для визуализации на мониторе 610. На основании указанных данных визуализации возможна диагностика, является ли особым типом ткань перед частью наконечника иглы 200.
Следует отметить, что также подмножество волокон, составляющих множество волокон, может быть использовано для направления света в ткань, тогда как другое подмножество волокон применяют для сбора света, исходящего от ткани, в которой расположена игла.
Отношение падающего света к исходящему свету определяют как коэффициент отражения. Посредством освещения ткани белым светом и спектрального разрешения обнаруженного света, может быть получен спектр отражения от ткани.
Спектры отражения различных типов тканей в основном различаются в зависимости от различного молекулярного строения тканей. В результате измерения этих спектров можно отличить ткани друг от друга. Так как при оптическом способе возможна только ограниченная глубина проникновения (глубина изображения составляет от нескольких миллиметров до нескольких сантиметров), направление иглы или канюли без наведения неинвазивным средством затруднительно из-за отсутствия обзора положения иглы или канюли в пространстве.
Посредством правильного выделения признаков, эту информацию о ткани можно использовать для классификации ткани на разные типы тканей. Эту информацию можно использовать для правильного размещения иглы в точном местоположении в теле.
Фигура 2 представляет собой схематический чертеж игольчатого устройства в поперечном сечении согласно примеру варианта осуществления, в соответствии с которым датчик 220 реализован посредством системы линз, содержащей линзу 250 и систему 260,270 активации.
Для создания компактной системы линз применяют асферическую поверхность линзы 250. Путем изготовления линзы 250 из соответствующего полимера можно создать компактную систему линз, подходящую для массового производства. Предпочтительно, полимер должен быть полимером низкой плотности для предоставления легкого смещения системы линз.
Систему линз располагают на расстоянии L от оптического выхода оптического волокна 230, заданном посредством крепления 240. Расстояние (L) значительно больше, чем диаметр сердцевины оптического волокна 230.
Система линз может быть частью, установленной на стержне 210 игольчатого устройства вместе с системой активации, включающей в себя электромеханическую двигательную систему с катушками 270, работающими совместно с магнитами 260, причем магниты механически прикреплены к оптическому волокну 230 таким образом, чтобы выполнять сканирование оптическим волокном 230 и линзой 250 под действием двигательной системы, причем возможна как активация только оптического волокна, так и активация оптического волокна вместе с линзой.
В этом примере варианта осуществления, линза 250 представляет собой единственную плоско-асферическую линзу впереди тонкой плоской стеклянной пластины 280 выходного отверстия, как наглядно представлено на фигуре 2. Асферическая линза выполнена из полиметилметакрилата (РММА) и содержит входной зрачок диаметром 0,82 мм. Числовая апертура (NA) составляет 0,67, а фокусное расстояние (измеренное в воздухе) составляет 0,678 мм. Система линз оптимизирована для длины волны равной 780 нм. Выходное отверстие 280 плоское и не имеет оптической силы.
Следует заметить, что свободное рабочее расстояние линзы 250 объектива должно быть больше, чем толщина выходного отверстия 280. Будет выполнено сканирование линзы 250 объектива перед выходным отверстием. Для большей прочности выходное отверстие должно иметь определенную толщину. Как правило, толщина составляет более, чем 0,1 мм.
Этот вариант осуществления является особенно, но не исключительно, выгодным для получения улучшенного оптического датчика, особенно подходящего для миниатюрных устройств, например для медицинских устройств для исследований in vivo. Посредством прочного прикрепления или установки системы линз на оптическом волокне, область обзора оптического датчика может быть определена напрямую поперечным ходом оптического волокна. Таким образом, требуется лишь относительно небольшой ход. Область обзора, таким образом, больше не ограничена ходом. Так как система линз используется сама по себе только для формирования изображений вблизи оптической оси (т.е. небольшая область обзора), она может обеспечивать упрощение (т.е. менее сложный комплекс и меньшее количество элементов линзы) ее оптического дизайна, которое облегчает изготовление с сохранением той же высокой разрешающей способности.
Следует также упомянуть, что оптический датчик, в частности, подходит для относительно простого и крупномасштабного производства благодаря установке системы линз с возможностью смещения на конечной части оптического волокна. С практической точки зрения, это может снизить необходимую точность во время изготовления, что, в свою очередь, может снизить стоимость за единицу на зонд.
Это особенно важно, так как эндоскоп, катетер или иглу с встроенным оптическим датчиком, как правило, утилизируют после однократного применения в соответствии с санитарными требованиями.
На фигуре 3 представлена интервенционная система согласно примеру варианта осуществления изобретения. Система включает удлиненное игольчатое устройство 200, датчик 220, расположенный на части наконечника игольчатого устройства, устройство 500 формирования изображения, способствующее предварительному наведению, анализирующее устройство 100, способствующее улучшенному наведению, и вычислительное устройство 600. Анализирующее устройство включает источник 110 света и спектрограф в качестве приемника 120 света. Устройство 500 формирования изображения включает источник 510 излучения и детекторную матрицу 520. Вычислительное устройство включает обрабатывающий блок 620 для обработки сигналов, идущих от устройства 500 формирования изображения и от анализирующего устройства 100, и монитор 610 для контроля информации, способствующей направлению устройств для биопсии в тело.
Как представлено на фигуре 3, интервенционная система, включает в себя основанную на рентгеновском излучении систему 500 наведения иглы с наведением по изображению и игольчатое устройство 200, включающее в себя датчик, т.е. оптическое волокно, соединенное с анализирующим устройством 100. Система наведения иглы с наведением по изображению обеспечивает формирование двух/трехмерного изображения повреждения и интерактивный контроль за продвижением иглы с наведением по изображению, каждое из которых связано с оптической информацией, полученной посредством иглы, причем рентгеновская система 500 обеспечивает предварительное наведение, тогда как оптическая информация, принятая от анализирующего устройства 100, обеспечивает окончательное точное наведение к местоположению устройства.
Система способна в интерактивном режиме отслеживать игольчатое устройство от места разреза до точки-мишени посредством наложения двухмерных фотоскопических изображений на трехмерную реконструкцию ткани и предоставлять молекулярную информацию о ткани в каждой точке вдоль траектории иглы, совмещенную с положением внутри тела пациента. Область вдоль траектории иглы может быть отсканирована (сканирование вперед и сканирование в сторону) с целью предоставления индикации наличия повреждения на молекулярном уровне. Предпочтительно при реконструкции того, какая ткань находится перед иглой, данные рентгеновского излучения и информация о положении иглы активно используются для оптической реконструкции того, какая ткань находится перед иглой.
Например, сравнивают границы опухоли, выведенные из сканирования иглой и из рентгеновского излучения. Информация рентгеновского излучения дает оценку формы опухоли, но точные границы определить невозможно. Фотонная игла дает детальную информацию о границах опухоли, но эту информацию получают только вдоль траектории иглы. Объединяя рентгеновскую форму опухоли с одномерной информацией иглы, можно вычислить новое оценочное значение трехмерного размера опухоли. Вновь выведенная расширенная граница будет лучшей оценкой границ опухоли. Рентгеновскую информацию и информацию фотонной иглы далее связывают с MRI-изображениями той же области (совокупность MR-данных можно совместить с совокупностью данных, полученных посредством рентгеновского аппарата). Игольчатое устройство, оснащенное оптическим волокном, также можно использовать, например, для размещения провода локализации. Провод локализации включает в себя средство фиксации и может быть оснащен волокном.
Другой аспект извлечения пользы из информации от датчика игольчатого устройства в целях изобретения, состоит в трудности перевода измеренных оптических данных в тип ткани, когда морфология окружающей ткани не известна. Таким образом, для оптимального принятия решения о характеристике ткани необходима информация о морфологии, получаемая от неинвазивной системы формирования изображения в качестве входной информации. Таким образом, предпочтительно сначала совмещать оптические данные с данными неинвазивной системы формирования изображения, а затем использовать оптическую информацию вместе с морфологической информацией вокруг иглы, поступающей от неинвазивного средства формирования изображения, для перевода измеренных оптических данных в тип ткани перед иглой или возле нее. Например, когда игла находится в мягкой ткани, на оптическую информацию может влиять наличие или отсутствие близости костной структуры. Принимая это во внимание, возможна более надежная характеристика ткани.
Для демонстрации изобретения описано экспериментальное вмешательство с использованием иглы. Фантом, т.е. объект, подвергающийся биопсии, помещают на, например, опору с С-образным рычагом и устанавливают иглу на шаговый двигатель, передвигающий иглу в осевом направлении (минимальный шаг составляет 0,25 микрон). Иглу соединяют с оптическими волокнами спектрометра. По меньшей мере одно из волокон обнаруживает свет, отраженный от ткани, таким образом представляя собой оптический элемент.
Вмешательство с использованием иглы состоит из получения рентгенологических и фотоскопических рентгенологических изображений, кроме того, в дополнение оптический отраженный спектр измеряют посредством иглы, содержащей волокна, соединенные с консолью, соединенной с рентгенологической системой.
После полного поворота С-образного рычага вокруг объекта, возможно образование трехмерных реконструкций объекта из рентгенологической информации, включая положение иглы. Кроме того, продвижение иглы выполняют на основе фотоскопического рентгенологического изображения. Параллельно получают информацию о ткани посредством иглы.
На фигуре 4 представлены три изображения, которые могут быть показаны на мониторе для помощи в направлении игольчатого устройства. Каждое из изображений представляет собой, в основном, изображение от рентгенологического устройства, добавленное в верхнем левом углу изображения спектра, полученного анализирующим устройством на основании информации о ткани от иглы. Фотоскопическое изображение от рентгенологического устройства позволяет определить относительное положение иглы (удлиненная черная линия от середины каждого изображения до верхнего правого угла) по отношению к фантому (черная тень), тогда как спектральная информация четко показывает, когда достигнута небольшая трубка (черная контрастная линия с левой стороны до нижнего правого угла). Это позволяет определить местоположение иглы с точностью до 100 микрон. Хотя информация о рентгенологическом изображении и оптическая информация примерно представлены в объединенном изображении, существуют различные другие способы представления объединенной информации, например, посредством использования цвета.
В качестве примера рассмотрим структуру, требующую детального предварительно записанного изображения. Та же структура представляет собой прямое изображение, полученное посредством устройства формирования изображения (например, фотоскопического рентгенологического средства формирования изображения). Это предоставляет менее подробное изображение и меньшую точность совмещения предварительно записанного изображения с данным изображением. Посредством использования оптических данных (см.вставки на фигуре 4), положение иглы по отношению к соответствующим признакам может быть определено с более высокой точностью. Теперь может быть выполнено совмещение вновь полученного изображения с совокупностью предварительно записанных данных с большей точностью, на основе информации от игольчатого устройства.
Использование информации от датчика игольчатого устройства также может предоставлять возможность сразу начать продвижение иглы без прямого наведения, основываясь только на предварительно записанном изображении. Используя информацию о локальной ткани посредством фотонной иглы, врач может оценить приблизительное расположение иглы на предварительно записанном изображении.
Фигуры с 5 по 7 представляют примеры обнаружения спектра при вмешательстве посредством иглы при различных положениях иглы в ткани. Чем выше число спектров, тем дальше игла находится в ткани.
На фигурах 5 и 6 четко видны переходы от одного типа ткани к другому типу ткани. На фигуре 7 представлены спектры для трех различных положений. В этом примере представлены четкие переходы, а спектры достаточно отличны друг от друга, чтобы различить переход. Например, эти переходы мягких тканей могут быть не видны на рентгенологическом изображении. Таким образом, при связывании рентгенологического изображения с предварительно записанным, например, MR-изображением, показывающим эти переходы мягких тканей, эти ориентиры можно не использовать. Это стало возможно с использованием оптической информации.
Фигура 8 представляет собой блок-схему последовательности операций способа объединения предварительно записанных изображений с прямым изображением интересующего объекта согласно изобретению. Следует понимать, что этапы, описанные в отношении способа, являются основными этапами, причем эти основные этапы могут быть дифференцированы или разделены на несколько подэтапов. Кроме того, также возможны подэтапы между этими основными этапами. Таким образом, подэтап упоминается только, если указанный этап важен для понимания принципов способа согласно изобретению.
На этапе Sl способа согласно изобретению, предварительно записанное изображение интересующей области пациента измеряют и сохраняют след системы координат.
На этапе S2, осуществляют вмешательство, используя прямое изображение.
На этапе S3, выполняют наложение предварительно записанного и прямого изображения друг на друга.
Этап выявления признаков, на котором вручную или, предпочтительно, автоматически выявляют характерные и отличительные особенности объектов (замкнутые области, края, контуры, линии пересечения, углы и т.д). Для дальнейшей обработки, эти признаки могут быть представлены посредством их отличительных характерных особенностей (центров тяжести, концов линий, отличительных точек), называемых контрольными точками.
Этап сопоставления признаков, на котором устанавливают соответствия между признаками, выявленными на прямом изображении и выявленными на предварительно записанном изображении. С этой целью применяют различные описания признаков и сходные измерения наряду с пространственными отношениями признаков.
Этап оценки модели преобразования, на котором оценивают тип и параметры, так называемых функций отображения, сверяя прямое изображение и предварительно записанное изображение. Параметры функций отображения рассчитывают посредством установленного соответствия признаков.
Этап повторной выборки и трансформации изображения, на котором прямое изображение преобразуют посредством функций отображения. Значения изображения в нецелой оси координат вычисляют посредством интерполяционной техники.
На этапе S4 способа согласно изобретению, в качестве отличительного признака получают информацию о локальной ткани от фотонной иглы.
На этапе S5, структуры на прямом изображении идентифицируют в пределах сферы, образованной в результате точного наложения, на предварительно записанном изображении, которые соответствуют информации, предоставленной фотонной иглой, как, например, граница между типами тканей или кровеносными сосудами, или другими структурами.
На этапе S6, систему координат предварительно записанного изображения повторно калибруют по отношению к прямому изображению таким образом, что структура, обнаруженная фотонной иглой, находится точно на наконечнике иглы на предварительно записанном изображении (разумеется, наконечник иглы видим на прямом изображении).
Несмотря на то, что изобретение представлено и детально описано на чертежах и в приведенном выше описании, подобное представление и описание следует рассматривать как иллюстративное или приведенное в качестве примера, а не ограничительным; изобретение не ограничено представленными вариантами осуществления.
Другие разновидности представленных вариантов осуществления могут быть понятны и реализованы специалистами в данной области техники при применении на практике заявленного изобретения, в результате изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «включающий» не исключает других элементов или этапов, а единственное число не исключает множественного числа. Один процессор или другое устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт того, что определенные показатели приводятся во взаимно различных зависимых пунктах формулы изобретения, не указывает на невозможность использования комбинации этих показателей для получения преимущества. Компьютерную программу можно хранить/размещать на подходящем носителе информации, таком как оптическое устройство для хранения информации или полупроводниковый носитель информации, поставляемый вместе или в качестве части другой аппаратуры, но также можно размещать и в других формах, как, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не следует рассматривать в качестве ограничения объема изобретения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
100 - анализирующее устройство
110 - источник света
120 - приемник света
200 - игольчатое устройство
210 - стержень
220 - датчик
230 - волокно
240 - крепление
250 - линза
260 - магнит
270 - катушка
280 - отверстие
290 - удерживающая часть
500 - устройство формирования изображения
510 - источник излучения
520 - детекторная матрица
600 - обрабатывающее устройство
610 - монитор
620 - обрабатывающий блок
Реферат
Изобретение относится к медицинской технике, а именно к системам для направлений медицинского устройства в намеченное местоположение. Интервенционная система включает устройство формирования изображения для обеспечения прямого изображения объекта, игольчатое устройство, выполненное с возможностью введения в объект и имеющее положение в объекте, обнаруживаемое на прямом изображении, и обрабатывающее устройство, выполненное с возможностью получения предварительно записанного изображения объекта из баз данных. Игольчатое устройство включает датчик обеспечения местных данных, соответствующих свойствам ткани вблизи датчика, а обрабатывающее устройство выполнено с возможностью совмещения наложением предварительно записанного изображения и прямого изображения друг на друга, причем местные данные от датчика используются для повторной калибровки совмещения наложением на основе предварительно записанного изображения, положения игольчатого устройства на прямом изображении и местных данных от датчика. Машиночитаемый носитель системы имеет сохраненную на нем компьютерную программу, которая предписывает обрабатывающему устройству выполнять способ совмещения предварительно записанного изображения и прямого изображения объекта. Использование изобретения позволяет повысить точность наложения изображений. 2 н. и 10 з.п. ф-лы, 8 ил.
Формула
- устройство (500) формирования изображения для обеспечения прямого изображения объекта,
- игольчатое устройство (200), выполненное с возможностью введения в объект и имеющее положение в объекте, обнаруживаемое на прямом изображении,
- обрабатывающее устройство (600), выполненное с возможностью получения предварительно записанного изображения объекта из баз данных,
причем игольчатое устройство (200) включает в себя датчик (220) для обеспечения местных данных, соответствующих свойствам ткани вблизи датчика (220), и
обрабатывающее устройство (600) выполнено с возможностью совмещения наложением предварительно записанного изображения и прямого изображения друг на друга, причем местные данные от датчика (220) используются для повторной калибровки совмещения наложением на основе предварительно записанного изображения, положения игольчатого устройства (200) на прямом изображении и местных данных от датчика (220).
анализирующее устройство (100), причем анализирующее устройство соединено с датчиком (220) и выполнено с возможностью обработки местных данных от датчика, таким образом, генерируя информацию о свойствах ткани.
- приема предварительно записанного изображения из базы данных,
- формирования прямого изображения от устройства (500) формирования изображения,
- определения положения игольчатого устройства (200) в прямом изображении,
- формирование совмещения наложением предварительно записанного изображения и прямого изображения друг на друга,
- приема местных данных от датчика (220), размещенного в игольчатом устройстве (200), причем местные данные соответствуют свойствам ткани вблизи датчика (220), и
- повторной калибровки совмещения наложением предварительно записанного изображения и прямого изображения с использованием местных данных от датчика (220), причем местные данные от датчика (220) используют для повторной калибровки совмещения наложением на основе предварительно записанного изображения, положения игольчатого устройства (200) на прямом изображении и местных данных от датчика (220).
Документы, цитированные в отчёте о поиске
Фотоматричное устройство
Комментарии