Имитатор отражённых радиолокационных сигналов - RU189247U1
Код документа: RU189247U1
Чертежи
Описание
Полезная модель относится к радиолокации, точнее к дальнометрии или радиовысотометрии, а именно к устройствам для имитации частотно-временной структуры радиолокационного сигнала, отраженного от одной или нескольких целей и/или подстилающей поверхности.
Общей проблемой создания имитаторов является формирование эквивалентных отраженных эхо-сигналов с возможностью сквозных испытаний и контроля параметров СВЧ- и НЧ-трактов излучения и обработки сигналов в широких диапазонах параметров излучаемых и принимаемых сигналов.
При работе имитатора в составе комплекса полунатурного моделирования (ПНМ) необходим учет всех основных параметров возможной фоноцелевой обстановки (ФЦО) для технической и функциональной проверки корректности работы бортового радиолокатора в условиях, близких к реальным, к критическим и даже запредельным.
Существующие комплексы ПНМ для радиовысотомеров (РВ), радиодальномеров и радиолокационных систем (РЛС) способны решать задачи имитации радиолокационных сигналов, отраженных от одного или нескольких отражателей на несущей частоте, но без управления их характеристиками в режиме реального времени или без учета возможности варьирования и нестабильностей параметров модуляции (амплитуды, частоты, фазы) излучаемого сигнала, особенно для сложномодулированных сигналов, например, с линейной частотной модуляцией (ЛЧМ).
Известна реализация наземной отработки радиолокационных систем бортового оборудования на базе радиобезэховой камеры, в которой реализована имитация отражений от пространственно распределенных объектов с учетом текстуры поверхности и помехозащиты. Общие недостатки известных решений – активное использование радиобезэховой камеры, акцент смещен на формирование ФЦО из точечных целей. Для имитации требуются детерминированность излучаемого сигнала или дополнительная синхронизация с РЛС, что означает невозможность полной проверки приемопередатчиков на несущей частоте, особенно при переменных или неизвестных параметрах модуляции. К недостаткам способов генерирования текстуры 3D объектов относят трудоемкость формирования произвольной границы стыковки тематических данных при составлении текстурной карты и невозможность генерирования реалистичной текстуры местности в реальном масштабе времени («Способ генерирования текстуры в реальном масштабе времени и устройство для его реализации», Бодин О. Н. и др. – Патент РФ 2295772. 26.09.2005).
Также известны разработки ГосНИИАС имитаторов с ориентацией на использование современных принципов цифровой обработки сигналов (ЦОС) с возможностью формирования многоточечных целей. В статье «Особенности формирования фоноцелевой обстановки на комплексах полунатурного моделирования бортовых радиолокационных систем конечного наведения» (Д.В. Хлебников, Ю.Д. Кислицын, E.С. Конаныхин, Д.В. Лазнков – НТК «Авиационные системы в XXI веке». Сборник докладов. Москва: Гос. НИИ авиационных систем, 2017. С. 70–80), с упоминанием имитаторов на базе СБИС 1879ВМЗ, выполненных на АО «УПКБ «Деталь» (г. Каменск-Уральский Свердловской обл.), приведены особенности формирования ФЦО в комплексах ПНМ бортовых РЛС. Приведенные принципы базируются на использовании каналов радиочастотной памяти для имитации целей, для перемещающихся и распределенных по углу – нескольких синхронизированных каналов. Общие недостатки предложенных решений – не ясна взаимосвязь возможности создания разнообразных и адекватных отражений от подстилающих поверхностей с конкретными параметрами каналов радиочастотной памяти эхосигналов, максимально приближенных к реальным условиям.
В патенте РФ №2522502 на имитатор сигнала радиолокатора с синтезированной апертурой (С.В. Валов, А.И. Сиротин, С.В. Щербаков. Дата приоритета: 10.12.2012) ЦОС заключается в использовании двух АЦП квадратурных составляющих сигналов, двух фильтров с конечной импульсной характеристикой (ФКИХ), коэффициенты для которых поступают по шине ввода-вывода из внешнего процессора с периодом обновления импульсной характеристики сцены Т<1/2ДFд, где ДFд – ширина доплеровского спектра сигнала. Схема также содержит квадратурный умножитель и генератор прямого цифрового синтеза, которые могут быть использованы для формирования группового доплеровского смещения частоты формируемого сигнала – ПРОТОТИП.
Недостатком прототипа является невозможность качественной имитации эквивалентных малых высот ЛА при изменении параметров зондирующего сигнала из-за наличия задержки в цепях аналоговой и цифровой обработки сигнала. Большинство современных РВ и РВС для повышения точности изменяют параметры модуляции, например, крутизну ЛЧМ. Для повышения помехозащищенности возможно применение случайного (псевдослучайного) закона изменения параметров, что не позволяет установить однозначную зависимость параметров модуляции от параметров имитируемой обстановки.
Поэтому, для качественной имитации эквивалентных малых высот ЛА помимо возможности смещения частоты необходимо в реальном времени определять величину такого сдвига в соответствии с учетом мгновенных параметров зондирующего сигнала и величины собственной задержки в цепях аналоговой и цифровой обработки сигнала.
Технической задачей полезной модели является построение практической схемы имитатора для максимально приближенной к реальной, полной проверки аппаратуры и алгоритмов работы радиолокатора во всём диапазоне имитируемых высот ЛА и дальностей до цели.
Технический результат достигается за счет динамического управления параметрами модулирования и цифровой обработки сигналов при переменных параметрах модуляции, когда отражённый сигнал формируется на основе текущего излучаемого сигнала, с возможностью непрерывного изменения фазы и имитируемых задержки, доплеровской частоты и ослабления формируемого сигнала, для ЛЧМ сигналов возможна имитация дальностей с задержкой менее собственной задержки имитатора.
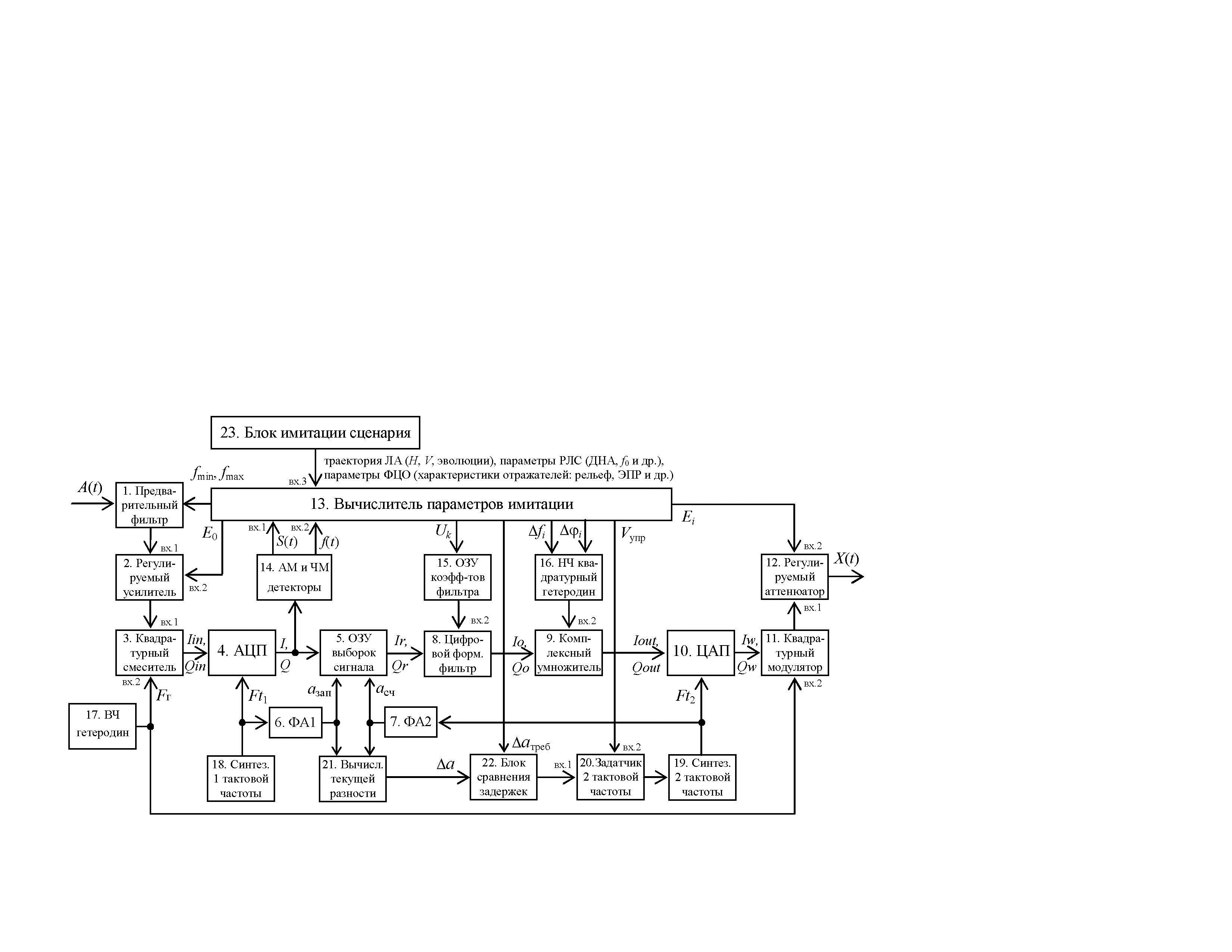
Для решения поставленной задачи предлагается имитатор отражённых радиолокационных сигналов, характеризующийся тем, что содержит предварительный фильтр, регулируемый усилитель, квадратурный смеситель, двухканальный АЦП, ОЗУ выборок сигнала, первый и второй формирователь адреса, цифровой формирующий фильтр, комплексный умножитель, двухканальный ЦАП, квадратурный модулятор, регулируемый аттенюатор, вычислитель параметров имитации, блок АМ и ЧМ детекторов, ОЗУ коэффициентов фильтра, низкочастотный (НЧ) квадратурный гетеродин, высокочастотный (ВЧ) гетеродин, синтезатор 1-ой тактовой частоты, синтезатор 2-ой тактовой частоты, задатчик 2-ой тактовой частоты, вычислитель текущей разности, блок сравнения задержек и блок имитации сценария со следующими соединениями: входной зондирующий радиосигнал А(t) через предварительный фильтр и регулируемый усилитель соединен с первым радиочастотным входом квадратурного смесителя, со вторым входом которого соединён выход ВЧ гетеродина Fг, выход (Iin, Qin) квадратурного смесителя соединён с аналоговым входом квадратурного сигнала двухканального АЦП, со вторым тактовым входом которого соединён выход синтезатора 1-ой тактовой частоты Ft1, этот же выход также соединен со входом первого формирователя адреса, выход двухканального АЦП (I, Q) через блок АМ и ЧМ детекторов соединен с 1-м и 2-м задающими входами S(t) и f(t) вычислителя параметров имитации, 3-й задающий вход которого соединен с выходом блока имитации сценария, выход двухканального АЦП (I, Q) также соединен с входом ОЗУ выборок сигнала, с тактовыми входами записи азап и считывания асч которого соединены выходы первого и второго формирователей адреса, также эти выходы формирователей адреса через вычислитель текущей разности соединены с первым входом Δa блока сравнения задержек, со вторым входом которого соединен выход Δaтреб вычислителя параметров имитации, выход ОЗУ выборок сигнала соединен с сигнальным входом (Ir, Qr) цифрового формирующего фильтра, выход которого (Io, Qo) через комплексный умножитель соединен с входом (Iout, Qout) двухканального ЦАП, выход блока сравнения задержек через задатчик 2-ой тактовой частоты соединен с входом синтезатора 2-ой тактовой частоты, выход которого Ft2 соединен с входом второго формирователя адреса и вторым тактовым входом двухканального ЦАП, выход которого соединён с аналоговым входом (Iw, Qw) квадратурного модулятора, со вторым входом которого соединён выход ВЧ гетеродина Fг, вычислитель параметров имитации своими вычисленными значениями на выходе Uk через ОЗУ коэффициентов фильтра соединен со вторым входом цифрового формирующего фильтра, выходами Дfi и Дϕi через НЧ квадратурный гетеродин соединен со вторым входом комплексного умножителя, выходом Vупр соединен с управляющим входом задатчика 2-ой тактовой частоты, выходом (fmin, fmax) соединен с управляющим входом предварительного фильтра, выходом E0 соединен с управляющим входом регулируемого усилителя, а выходом Ei соединен с управляющим входом регулируемого аттенюатора, радиочастотный вход которого соединен с выходом квадратурного модулятора, а выход которого X(t) является сформированным конечным сигналом имитатора.
Особенности предлагаемой структуры построения электронного имитирующего комплекса:
• Имитируемый отраженный сигнал представляет собой непрерывные копии излучённого сигнала, просуммированные с учетом программно заданных задержек и параметров квадратурной модуляции (амплитуда, доплеровский сдвиг частоты).
• Возможен произвольный характер движения летательного аппарата (JIA).
• Динамическая смена основных параметров моделирования в соответствии заданным сценарием.
Способ построения имитаторов отраженных «эхо-сигналов» ретрансляционного типа основан на выполнении непрерывного преобразования зондирующего СВЧ-сигнала с антенны передатчика радиолокатора в имитируемый отраженный сигнал, подаваемый далее на антенну приемного устройства. При этом, за счет изменения параметров преобразования, возможна имитация движения радиолокатора/ЛA по заданной траектории над имитируемой поверхностью в условиях переменной сцены/ФЦО. Подключение к радиолокатору возможно с использованием пар приемопередающих антенн (в том числе в безэховой камере), а также, для повышения точности и исключения излучений, непосредственно СВЧ-кабелями.
Для возможности быстрого и точного управления параметрами имитации необходимо использовать методы цифровой обработки сигналов (ЦОС). Тогда, при имитации отражения от цели для РЛС или подстилающей поверхности для РВ эквивалентность формируемого на СВЧ отраженного сигнала может быть обеспечена при выполнении следующих основных преобразований:
1) перенос зондирующего сигнала в область низких частот (в рабочую зону Найквиста – полосу работы аналого-цифрового преобразователя АЦП) и его оцифровка (с частотой дискретизации не менее удвоенной ширины полосы частот сигнала);
2) переменная задержка для имитации заданной переменной дальности (высоты для РВ);
3) переменное ослабление сигнала для имитации затухания в соответствии с дальностью распространения и характеристиками отражающей поверхности (отражателями сцены/ФЦО);
4) имитация эффектов доплеровского сдвига частоты, а также имитация дальностей за счет смещения частоты (при ЛЧМ), при этом реализуется возможность переменного сдвига частоты (и фазы) формируемого сигнала;
5) формирование протяженного портрета по дальности в соответствии с типом имитируемого отражения, характеристиками радиолокатора, имитируемой траектории и отражателей ФЦО;
6) цифро-аналоговое преобразование (ЦАП) полученного сигнала и его перенос в исходную область СВЧ;
Перечисленные пункты 2-5 основных преобразований сигнала могут быть выполнены в произвольном порядке, а пункт 3 может быть распределен и реализован с помощью аттенюаторов до выполнения АЦП, после выполнения ЦАП, а также при цифровом умножении.
На чертеже представлена функциональная электрическая схема полезной модели имитатора ретрансляционного типа для формирования отраженного сигнала для радиолокатора, на которой изображено:
1 – предварительный фильтр;
2 – регулируемый усилитель;
3 – квадратурный смеситель;
4 – двухканальный АЦП;
5 – ОЗУ выборок сигнала;
6 – ФА1 – первый формирователь адреса;
7 – ФА2 – второй формирователь адреса;
8 – ЦФФ – цифровой формирующий фильтр;
9 – комплексный умножитель;
10 – двухканальный ЦАП;
11 – квадратурный модулятор;
12 – регулируемый аттенюатор;
13 – вычислитель параметров имитации;
14 – блок АМ и ЧМ детекторов;
15 – ОЗУ коэффициентов фильтра;
16 – низкочастотный (НЧ) квадратурный гетеродин;
17 – высокочастотный (ВЧ) гетеродин;
18 – синтезатор 1-ой тактовой частоты;
19 – синтезатор 2-ой тактовой частоты;
20 – задатчик 2-ой тактовой частоты;
21 – вычислитель текущей разности;
22 – блок сравнения задержек;
23 – блок имитации сценария;
А(t) – зондирующий радиосигнал с выхода передатчика радиолокатора (или с приемной антенны имитатора);
H, V, эволюции, ДНА, ЭПР – данные имитируемого полета ЛА, т.е. высота, скорость, угловые эволюции (крен и тангаж) носителя/радиолокатора, диаграмма направленности антенны, эффективная площадь рассеивания отражателей ФЦО;
S(t) и f(t) – выходные сигналы АМ и ЧМ детекторов, соответственно;
X(t) – сформированный сигнал, соответствующий отраженному сигналу от подвижной по дальности (высоте) сцене/ФЦО.
Имитатор работает следующим образом.
Зондирующий радиосигнал А(t), поступающий с выхода передатчика радиолокатора или приемной антенны имитатора проходит через предварительный фильтр. При этом для исключения шумов и возможных сигналов других радиолокаторов полоса пропускания предварительного фильтра может регулироваться в заданных пределах, например, от fmin до fmax, т.к. большинство радиолокаторов являются перестраиваемыми одночастотными. Для согласования уровня сигнала используется регулируемый усилитель. Величина коэффициента усиления (ослабления) E0 определяется из условия оптимального использования разрядной сетки АЦП, т.е. уровни сигналов на входе АЦП соответствуют (не превышают) максимальному уровню для выбранных схем АЦП.
Диапазон частот (fmin, fmax) предварительного фильтра и коэффициент E0 регулируемого усилителя также могут изменяться в процессе работы имитатора. В частности, для некоторых типов радиолокаторов имеется возможность использования априорной информации о зависимости центральной частоты, диапазона частот и/или уровня мощности излучения радиолокатора от условий работы: высоты, скорости полета, скорости сближения и др. Так как эти условия воспроизводятся, т.е. известны вдоль всей имитируемой траектории, то это позволяет согласовать диапазон частот и уровень сигнала для дальнейшего формирования отраженного сигнала с большей точностью. Также, для конкретного образца радиолокатора имеется возможность непрерывного согласования диапазона частот и уровня сигнала по результатам оценки параметров модуляции (включая необходимые усреднения и другую время-частотную обработку, выполняемую в вычислителе параметров имитации) по сигналам S(t) и f(t) от блока АМ и ЧМ детекторов. В простейшем случае регулируемый усилитель может выполнять функцию автоматической регулировки усиления (АРУ) для поддержания уровня сигнала на должном уровне.
Далее сигнал поступает в квадратурный смеситель, который с использованием сигнала ВЧ гетеродина выполняет преобразование частоты и демодуляцию с формированием квадратурных составляющих сигнала (Iin, Qin) на промежуточной (нулевой) частоте для упрощения дальнейшей цифровой обработки и формирования отраженного сигнала. Отметим, что здесь и далее, блоки вспомогательной фильтрации полезной части спектра сигналов являются частью соответствующих блоков преобразования сигналов.
Полученный сигнал (в форме двух квадратурных составляющих Iin, Qin) оцифровывается в двухканальном АЦП. Полученные составляющее (I, Q) поступают на входы АМ и ЧМ детекторов и сохраняются в ОЗУ выборок сигнала. При этом оцифровка в АЦП, детектирование АМ/ЧМ модуляции и запись в ОЗУ выборок сигнала (I, Q) выполняются с тактовой частотой Ft1 (или кратно) формируемой синтезатором 1-ой тактовой частоты.
Чтение из ОЗУ выборок сигнала (Ir, Qr), дальнейшая ЦОС и работа ЦАП выполняются с тактовой частотой Ft2 (или кратно) формируемой синтезатором 2-ой тактовой частоты. Для формирования физических адресов записи азап и считывания асч в/из ОЗУ выборок сигнала используются два формирователя адресов: ФА1 и ФА2 соответственно. Они могут быть реализованы в виде циклических двоичных счетчиков в диапазоне от 0 до amax, так чтобы после достижении максимального значения amax на следующем такте счет продолжался с 0.
В вычислителе текущей разности рассчитывается значение Да:
Да = mod((amax + азап – асч), (amax +1)),
где amax – максимальный адрес слова в ОЗУ для хранения квадратурных выборок сигнала; mod(v1,v2) – стандартная операция нахождения остатка от деления 1-го операнда на 2-й. В случае, если amax = (2n – 1), где n – целое, т.е. соответствует разрядности диапазона адресов ОЗУ выборок сигнала, то можно упростить выражение и использовать вычитание в пределах n разрядов с игнорированием знакового бита, что соответствует вычислению поразрядной операции «И», где маской выступает значение amax:
Да = (азап – асч) & (2n – 1) = (азап – асч) & amax .
В такой реализации ОЗУ выборок сигнала работает в режиме FIFO (First Input – First Output), т.е. реализует функцию линии задержки. Например, в случае отсутствия имитации доплеровского сдвига для формируемого радиолокационного портрета значения тактовых частот равны: Ft1 = Ft2, поэтому реализуемая в ОЗУ выборок сигнала задержка примерно равна:
τДа ≈ 2 Да /(Ft1 + Ft2) = Да / Ft1.
Выражение дает примерное значение истинной задержки в ОЗУ, а его точность определяется способом учета (усреднение, сглаживание или игнорирование отклонения) эффекта несинхронного изменения значений адресов, приводящих к скачкам значений Да на величину младшего разряда адреса, т.е. скачки от 0 до 1. При игнорировании скачков точность задания задержки в имитаторе Дτ ≈ 1/Ft1. Поэтому за счет увеличения тактовой частоты может быть обеспечена заданная точность задания задержки в имитаторе, например, меньше реальной разрешающей способности радиолокатора по дальности.
При реализации метода усреднения (или интегрирования в пределах интервала дискретизации) этих скачков, значение Да будет содержать дробную часть текущей разности адресов, что позволит точнее контролировать процесс имитации «статичных» по относительной дальности радиолокационных портретов.
На практике большинство траекторий подразумевают непрерывное изменение относительной дальности до имитируемых радиолокационных портретов целей. Из уровня техники (прототип, патенты DE 3803993B3, US 4450447) известно, что при отличии тактовой частоты считывания из FIFO от частоты записи можно имитировать смещение частоты, так как изменяется несущая/промежуточная частота воспроизводимого колебания. Поэтому в предлагаемом имитаторе для имитации доплеровского сдвига частоты величиной Fd вычислитель параметров имитации формирует сигнал Vупр, равный при этом значению относительной скорости сближения точек имитируемой сцены/ФЦО с радиолокатором Vr, а задатчик 2-ой тактовой частоты по заданному Vупр формирует сигнал настройки синтезатора 2-ой тактовой частоты на значение Ft2 так, чтобы:
Ft2 = Ft1 + Fd,
где Fd = 2Vr/λ – значение доплеровского сдвига для заданных значений длины волны излучения λ и относительной скорости сближения с радиолокатором Vr, т.е. при удалении Vr < 0 и Ft2 < Ft1.
При этом: τДа ≈ 2 Да /(Ft1 + Ft2), а точность задания задержки в имитаторе Дτ ≈ 2/(Ft1 + Ft2). Однако, поскольку тактовые частоты Ft1 и Ft2 не синхронизированы, то фактически, имитируемая задержка Дτ будет плавно изменяться: уменьшаться при Ft1 > Ft2, либо увеличиваться при Ft1 < Ft2. Следовательно, изменение фазы имитируемого отраженного сигнала также будет плавным, а регистрируемая радиолокатором задержка отраженного сигнала и дальность не будут дискретными.
Вычислитель параметров имитации для заданной траектории ЛА формирует значение требуемой задержки Δатреб в соответствии с текущей минимальной дальностью Rmin до ближайшего отражателя в имитируемой сцене ФЦО:
τ= 2 Rmin /с; Δатреб = max(Ft1 (2 Rmin /с – τo), Δаmin),
где τo – собственная задержка имитатора, т.е. минимальная реализуемая задержка, которая учитывает все задержки выбранных компонентов и соединений блоков имитатора при аналоговой и цифровой обработке сигнала; с – скорость света; max( ) – функция взятия максимального значения из перечисленных, предназначенная в данном случае для ограничения минимального значения, так чтобы в любом случае Δатреб ≥ Δаmin. Возможное значение для Δаmin зависит от типа используемого ОЗУ выборок сигнала, обычно Δаmin = 0…2.
Переменные значения координат траектории ЛА (H, V, эволюции) и также все необходимые для имитации постоянные и переменные параметры РЛС (ДНА, диапазон частот и несущая частота f0 и др.) и ФЦО (характеристики отражателей: положение/рельеф, ЭПР, скорость и направление движения ряда отражателей сцены/ФЦО и др.) поступают из блока имитации сценария.
Блок сравнения задержек сравнивает (вычитает) значения текущей Да и требуемой задержек Δатреб. Это необходимо для определения признака достижения заданной высоты Да = Δатреб, для того чтобы остановить изменение имитируемой в ОЗУ выборок сигнала дальности по достижению заданной величины дальности. Эту задачу выполняет задатчик 2 тактовой частоты, который, в случае, если значение Vупр = 0, устанавливает Ft2 = Ft1. При плавном изменении имитируемой дальности: Да ≠ Δатреб и Vупр=Vr ≠ 0, поэтому Ft2 = Ft1 + 2Vr/λ, т.е. управление имитацией выполняется по заданной скорости и без скачков по имитируемой дальности.
Цифровой формирующий фильтр ЦФФ выполняет формирование протяженного портрета по дальности в соответствии с типом имитируемого отражения путем выполнения свертки сигнала (Ir, Qr) c импульсной характеристикой сигнала сцены, представленной набором комплексных значений коэффициентов ЦФФ Uk. ЦФФ может быть реализован на основе полностью комплексного ФКИХ или, подобно прототипу, на основе пары ФКИХ для двух квадратурных составляющих сигнала. Также возможна реализация в частотной области путем перемножения спектров («Down range return simulator» – патент US 6075480 от 13.07.2000). Текущие значения коэффициентов ЦФФ Uk поступают из вспомогательного ОЗУ коэффициентов фильтра (двухпортового, т.е. с возможностью одновременных записи и считывания). Они рассчитываются в вычислителе параметров имитации и, подобно прототипу, могут обновляться с заданным периодом импульсной характеристики сцены Т < 1/2ДFд, где ДFд – ширина доплеровского спектра сигнала, а также при обнаружении изменения структуры/параметров зондирующего сигнала.
Для учета необходимого группового доплеровского сдвига частоты формируемого сигнала, а также для имитации дальностей за счет сдвига частоты, в цифровом комплексном умножителе происходит смещение сигнала по частоте (фазе) путём комплексного умножения квадратурных составляющих сигнала (Io, Qo) на квадратурный гармонический сигнал с частотой Δfi и фазой Δϕi от блока низкочастотного (НЧ) квадратурного гетеродина, выполненного по одной из типовых схем для прямого цифрового синтеза (ПЦС, DDS).
Использование заданного ненулевого сдвига частоты Δfi позволяет выполнить имитацию дальностей за счет сдвига частоты для радиолокаторов с длительными зондирующими сигналами с ЛЧМ («Устройство для имитации ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией». – Патент RU 2625567 от 11.07.2016). В предлагаемом устройстве имитация задержек менее собственной задержки имитатора τo выполняется за счет сдвига частоты формируемого сигнала. В этом случае выполняется условие: Ft1 (2 Rmin /с – τo) < Δаmin. Поэтому на выходе вычислителя параметров имитации устанавливаются значения Δатреб = Δаmin и Vупр = 0, а сдвиг частоты с помощью блока НЧ квадратурного гетеродина выполняется на величину Δfi, зависящую от параметров ЛЧМ модуляции («Преобразование радиолокационного сигнала для полунатурного моделирования многолучевого распространения», Боков А.С. и др. – «Надежность и качество сложных систем». Пенза : ПГУ, 2017. № 3. С. 60-67), а именно от знака и крутизны изменения частоты:
Δfi = 2 (Kf (Ro – R) – Vrf)/c,
где Kf= df/dt – крутизна изменения частоты зондирующего сигнала с ЛЧМ; Ro= τoс/2 – минимальная реализуемая имитатором дальность; R – требуемая имитируемая дальность; f – мгновенная частота зондирующего сигнала, для широкополосных сигналов можно использовать сигнал ЧМ детектора, тогда f = |Fг ± f(t)|, где знак «±» зависит от выбранных настроек фильтров и квадратурного смесителя имитатора.
Значение крутизны (со знаком) может быть получено при анализе изменения сигнала f(t) с выхода ЧМ детектора предлагаемого имитатора, в том числе в режиме реального времени. Возможный способ реализации цифровых АМ и ЧМ детекторов, с уменьшенным временем анализа, приведен также в описании широкополосного повторителя сигналов с малой задержкой («Wideband low latency repeater and methods». WO2013/184232 A1. Дата приоритета: 08.06.2012).
Использование заданного ненулевого сдвига фазы Δϕi позволяет снизить возможные эффекты фазовой нестабильности формируемого отраженного сигнала («Effect of DRFM Phase Response on the Doppler Spectrum of a Coherent Radar: Critical Implications and Possible Mitigation Techniques», Herselman, Nel, Cilliers. – CSIR, 2006), возникающие при дискретном характере изменения дальности. Как было сказано, в предлагаемом устройстве имитация задержек менее собственной задержки имитатора выполняется за счет сдвига частоты Δfi, который при ПЦС имеет некоторую дискретность, зависящую от точности выбранных методов и компонентов для реализации НЧ квадратурного гетеродина («Уменьшение дискретной ошибки цифрового метода имитации задержки отраженных радиолокационных сигналов», Боков А.С. и др. – сборник трудов ИРЭМВ-2017, DOI: 10.1109/RSEMW.2017.8103635). При имитации задержек более собственной задержки имитатора дискретность изменения дальности отсутствует, но использование дополнительного сдвига фазы Δϕi позволяет имитировать более сложные условия/нестабильности распространения в воздушной среде и отражения сигнала от различных типов поверхности без дополнительной коррекции коэффициентов ЦФФ Uk.
Таким образом, сигнал (Iout, Qout) соответствует отраженному сигналу от подвижного по дальности радиопортрета цели (поверхности для имитируемой высоты JIA). Он преобразуется в аналоговую форму в двухканальном ЦАП. Затем в квадратурном модуляторе переносится в исходную область радиочастот, и ослабляется в регулируемом аттенюаторе на величину Ei для имитации затухания, соответствующего дальности и средней ЭПР имитируемой сцены ФЦО.
Сформированный выходной сигнал X(t) далее подается на выход имитатора, для переизлучения передающей антенной имитатора в направлении приемной антенны радиолокатора либо подается непосредственно во входную цепь приемника радиолокатора при лабораторном тестировании.
Цифровая часть имитатора, от АЦП до ЦАП включительно, может быть реализована с использованием отдельных микросхем, либо с использованием комплексных решений – «систем на кристалле», например с технологиями «цифровой сигнальной памяти» (digital signal memory – DSM), радиочастотной памяти (DRFM), Radio-on-Chip или System-on-Chip (SoC). Для реализации функций ЦОС, включая амплитудное и частотное детектирование, FIFO, цифровую модуляцию и фильтрацию может быть использована программируемая логическая интегральная схема (ПЛИС). Например, ПЛИС XC7Z045 семейства Zynq-7000 содержит специализированные блоки ЦОС с высокой разрядностью сигналов, а также двухъядерный процессор ARM CORTEX A9 1 ГГц, программное обеспечение которого сможет выполнять имитацию сценария, вычислять параметры имитации и эффективно управлять всеми блоками ЦОС в режиме реального времени (прототип, «Комплекс полунатурного моделирования для сквозных испытаний, тестирования и проверки бортовых радиолокационных систем и устройств», Боков А.С. и др. – труды Международного симпозиума «Надежность и качество». Пенза, 2018. Т.1. С. 40-45).
Квадратурные смесители/модуляторы, гетеродины/синтезаторы, усилители/аттенюаторы и фильтры для согласования уровней и диапазона рабочих частот (например, с сигналами гетеродинов) известны из уровня техники для радиопромышленной технологии, поэтому могут быть выбраны из известных комплектующих изделий фирм Analog Devices, Hittite, IDT, Maxim Integrated, Qorvo, Texas Instruments и др. или спроектированы в соответствии с рекомендациями по построению радиочастотных трактов радиолокаторов используемого частотного диапазона.
При стационарных испытаниях, удобно непосредственное подключение кабелей к исследуемой радиолокационной системе без использования антенн. В случае использования общей приёмо-передающей антенны можно использовать циркулятор, антенный переключатель со стробированием работы, например по пороговой оценке уровня сигнала S(t) на выходе АМ детектора имитатора.
Реферат
Полезная модель относится к радиолокации, точнее к дальнометрии или радиовысотометрии, а именно к устройствам для имитации частотно-временной структуры радиолокационного сигнала, отраженного от одной или нескольких целей и/или подстилающей поверхности.Технической задачей полезной модели является построение практической схемы имитатора для максимально приближенной к реальной, полной проверки аппаратуры и алгоритмов работы радиолокатора во всём диапазоне имитируемых высот ЛА и дальностей.Технический результат достигается за счет динамического управления параметрами модулирования и цифровой обработки сигналов при переменных параметрах модуляции, когда отражённый сигнал формируется на основе текущего излучаемого сигнала, с возможностью непрерывного изменения фазы и имитируемых задержки, доплеровской частоты и ослабления формируемого сигнала, для ЛЧМ сигналов возможна имитация дальностей с задержкой менее собственной задержки имитатора. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Имитатор радиолокационной цели
Комментарии